7965596933
INNOWACYJNA
GOSPODARKA
•MooowftttimcK itcmost

ZB 1.3 Politechnika Lubelska
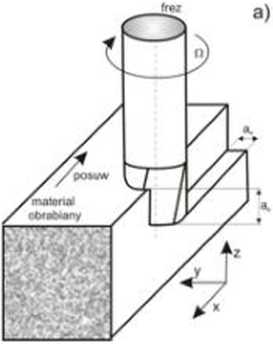
Regeneracyjny nieliniowy model skrawania - frezowanie

b)
posuw
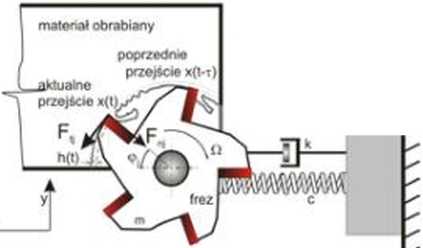
Model frezowania
Różniczkowe równanie ruchu
mx + cx + kx = aph[ty Kt (l -avr +/?^)(sin^-0.3cosę?)gfr Fj={Ftjsin<Pj -FnjC0S(Pj)3j> gJ = H{sin(pj)H(cos<pJ -cos<pe),
W = fysrarM +
hj (0 = fz cos ę. + (x(t) - x(t - r))cos (pj,

1 o
4 6 8 10 12 14 16 18 20
n (krpm]
Obszary niestabilności
05
Wyszukiwarka
Podobne podstrony:
a INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI I Politechnika Wrocławska UNIA
a INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI I Politechnika Wrocławska UNIA
a INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI I Politechnika Wrocławska UNIA
INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI Politechnika Częstochowska Potencjał
a INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI Politechnika Wrodawska H UNIA
a INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI I Politechnika Wrocławska UNIA
a INNOWACYJNA GOSPODARKA NARODOWA STRATEGIA SPÓJNOŚCI I Politechnika Wrocławska UNIA
POLITECHNIKA LUBELSKA ZBIÓR WEWNĘTRZNYCH AKTÓW PRAWNYCH REGULUJĄCYCH GOSPODARKĘ
Wschodnie Innowacyjne Centrum Architektury Politechniki Lubelskiej START: 10.00 DZIEŃ
INNOWACYJNA GOSPODARKA Wybrane problemy obrazowania w badaniach biotechnologicznych Artur Bal Polite
politechnika lubelska f 1 WYDZIAŁ MECHANICZNY l * * J KATEDRA PODSTAW KON->/ STRUKCJI MASZYN Labo
więcej podobnych podstron