1109810387
ty leżące w sąsiedztwie lub w niewielkiej odległości z wysokim prawdopodobieństwem powinny należeć do tego samego obiektu, a więc do tej samej klasy. Ta prosta obserwacja stanowiła inspirację do zaprojektowania algorytmu klasyfikacji uwzględniającego zarówno podobieństwo w przestrzeni cech jak i zależności geometryczne.
Zaproponowany algorytm używa klasyfikatora 1-NN (czyli metody stosunkowo wolnej, nawet po redukcji zbioru uczącego, która zresztą została przeprowadzona) tylko dla niektó-lych pikseli obrazu. Pozostałe piksele przechodzą do drugiego etapu, w któiym w pierwszej kolejności rozpatrywane jest kryterium związane z otoczeniem punktu i na jego podstawie podejmowana jest decyzja o przynależności piksela do określonej klasy. Dopiero w przypadku, gdy kiyterium to nie daje wystarczającej pewności, punkty są przetwarzane przez klasyfikator 1-NN. Idea klasyfikacji wieloetapowej (tzw. klasyfikatoiy kaskadowe) jest powszechnie stosowana w dziedzinie rozpoznawania obrazów dla przypadku ogólnego. W wypadku zadania klasyfikacji pikseli takie podejście może zasadniczo skrócić czas obliczeń kosztem niewielkiego, być może niezauważalnego spadku jakości segmentacji, pod warunkiem właściwego dobom schematu klasyfikatora. Z uwagi na brak miejsca nie możemy dokładnie opisać zbadanych wariantów naszkicowanego podejścia, pokazujemy jednak na Rys. 3 metody podziału płaszczyzny na punkty klasyfikowane w pierwszym przebiegu przy pomocy zbiom uczącego oraz te, które mają szansę być sklasyfikowane bardzo szybko, korzystając z informacji już o wynikach klasyfikacji ich sąsiadów . Eksperymenty pokazały, że wykorzystanie sąsiedztwa geometrycznego przy klasyfikacji powoduje rozbieżności w podejmowaniu decyzji dla tylko ok. 1-2% pikseli w stosunku reguły 1-NN (ze zredukowanym w obu przypadkach zbiorem odniesienia) zastosowanej do wszystkich pikseli, natomiast osiągnięte przyspieszenie klasyfikacji jest 2-3-krotne.

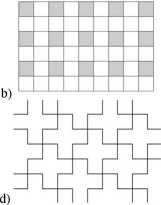
Rys. 3 Zbiory klasyfikowane w pierwszym przebiegu: (a) szachownica, (b) punkty kratowe, (c) punkty kratowe zmodyfikowane. Część (d) pokazuje, że “krzyże” pokrywają całą powierzchnię siatki prostokątnej.
Wyszukiwarka
Podobne podstrony:
ruchowych. Pasowanie mieszane - istnieje w nim niewielki luz lub niewielki wcisk. Pasowanie te stosu
5. Już teraz pracodawcy oferują praktyki wysokiej jakości. Jak doprowadzić do tego, by były
5. Już teraz pracodawcy oferują praktyki wysokiej jakości. Jak doprowadzić do tego, by były
5. Już teraz pracodawcy oferują praktyki wysokiej jakości. Jak doprowadzić do tego, by były
4.Już teraz pracodawcy oferują praktyki wysokiej jakości. Jak doprowadzić do tego, by były dobrze do
4. Już teraz pracodawcy oferują praktyki wysokiej jakości. Jak doprowadzić do tego, by były dobrze
4. Już teraz pracodawcy oferują praktyki wysokiej jakości. Jak doprowadzić do tego, by były dobrze
precyzyjną, znaną zmianę odległości obrazowej; pozwala to wykonywać zdjęcia z niewielkich odległości
Zdjęcie572 Definicja wirusa I Wirion zawiera ty Iko DNA lub RNA 2. Reprodukcja zachodzi « procesie s
23 N. 11. Dolina »Za Bramką«. Mała, ładna dolinka w niewielkiej odległości od Zakopanego ku Pd. Z.,
img178 178 obrotu lunety, kąt pionowy - pomierzyć lub określić odległość poziomą d. Wysokoać punktu
img178 178 obrotu lunety, kąt pionowy - pomierzyć lub określić odległość poziomą d. Wysokoać punktu
img178 178 obrotu lunety, kąt pionowy - pomierzyć lub określić odległość poziomą d. Wysokoać punktu
Kliniczna 3 dr Marlena Kossakowska brakujący slajd2 ♦Cechą kryzysu jest wysokie prawdopodobieństwo,
Kliniczna 3 dr Marlena Kossakowska brakujący slajd •Cechą kryzysu jest wysokie prawdopodobieństwo, ż
więcej podobnych podstron