2251772810
Pl.rzl *
File Edit View Display Diagram Simułation Analysis C
Function Błock Parameters: PID Controller

Data Types State Attrlbutes
PI, rzl
©
M
St€P
A ód
PI(S)
1
5+1
-►
P + I-
PID Cortrolter Transfer Fen
Sccpe
PID Tuner {PI_rzl/PlD Controller)

OL1 Design modę: Time domain
Form: Parallel Type: PI
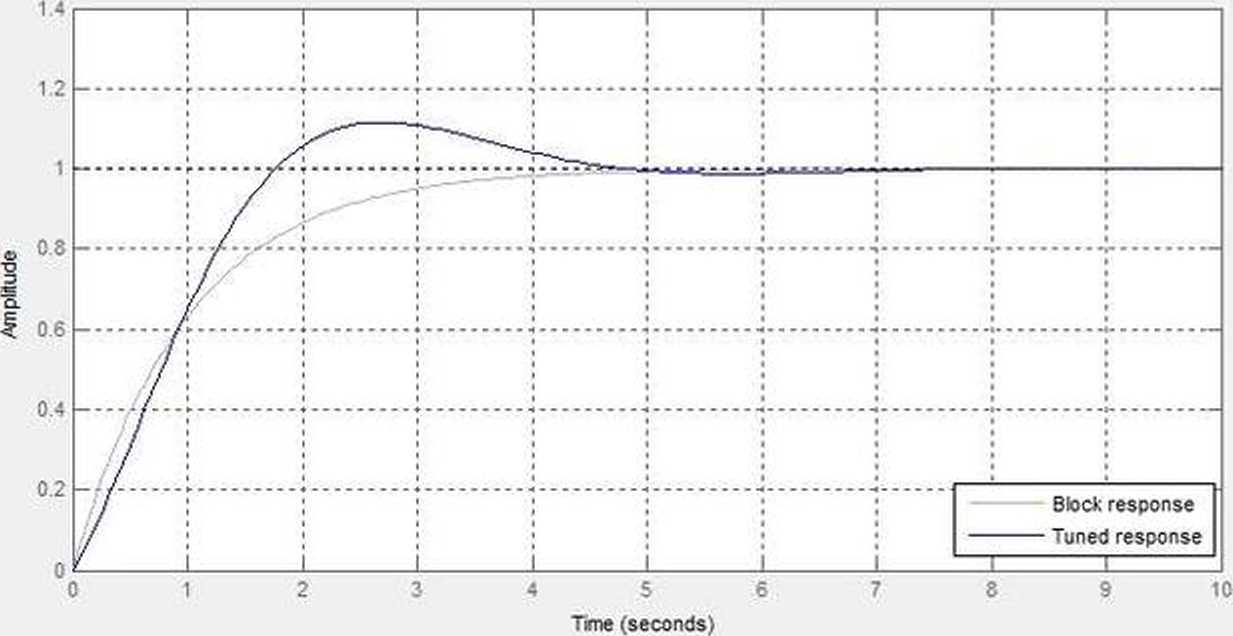
Plot:
Response:
Referencetracking
V Show błock response
Hide parameters ^
Controller parameters
|
Tuned |
Błock | |
|
p |
0.47319 |
1 |
|
I |
1.6046 |
1 |
|
D | ||
|
N |
Performance and robustness
|
Tuned |
Błock | |
|
Risetime |
1.3 seconds |
22 seconds |
|
Settling time |
4.34 seconds |
351seconds |
|
Overshoot |
11.6 % |
0% |
|
Peak |
1.12 |
1 |
|
Gain margin |
Inf dB © NaN rad/s |
Inf dB © NaN rad/s |
|
Phase margin |
60 deg © 1.12 rad/s |
90 deg © 1 rad/s |
|
Closed-loop stability |
Stable |
Stable |
Wyszukiwarka
Podobne podstrony:
File Edit View Display Diagram SimulaDon Analysis Codę Tools Help ^ a
rtdacpci_Drivers X File Edit View Display Diagram Simulation Ąnalysis Codę Jools Help (SB
File Edit View Display Diagram Simulation Analysis Codę Tools Help - HO ag>
*1 thyl * File Edit View Display Diagram thyl « © [*ł]thy1 Simulation Analysis Codę Tools ^ Update
^ RollAutopilotMdIRefWebinar - Simulink File Edit View Display Diagram Ro 11 Autop i lotMd IRefWeb
<8* Projekt_Jachimczyk - EA Academicaj File Edit View Project Diagram Element Tools Add-Ins Setti
<8* Projekt_Jachimczyk - EA Academic File Edit View Project Diagram Element Tools Add-Ins Setting
przedszkole dklasy £8 przedszkole - Select Enterprise - [Diagram - Class Diagram!]^ File Edit View J
model dziedziny (przykład) File Edit View Project Diagram Element Jools Add-Ins Settings Window Help
52 04
więcej podobnych podstron