6815960222
zaś w obszarach V i VI zachodzi
(5.43)
(5.44)
(5.45)
*,(<) = *r ('),
xM=-h(t)/Tr,
ÓX2(t)/ÓXt(t) = -VTp.
Rozwiązania równań (4.39), (4.42) oraz (4.45) mają postać, odpowiednio:
*l(0 = -rpz2(r) -BkpTp • ln|-Bkp + xę,(z)|+C_(z0), (5.46)
C_«o) = *i('o) + T^ilo) + BkpTp M-Bkp + Zj(<„)|, (5.47)
III i IV :
*l(0 = -Tp*2(t) + BkpTp • ln|Bkp + . (5.48)
C+('o) = ^i('o) + TptzCo) - BkpTp ■ ln| Bkp + z2(/„)|, (4.49)
V i VI :
Xi(t)=-TpK2(t) + Q,(k>), (5.50)
Co(to) = xl(lo)+TpX2(lo). (5.51)
Stan równowagi badanego układu odpowiada zależnościom:
x2(0 = 0 oraz u(t) = 0. (5.52)
Na płaszczyźnie fazowej jest to odcinek x2(t) = 0 oraz -a <xl <a. W zależności od wartości parametrów obiektu kp oraz Tp, a także charakterystyk przekaźnika, w układzie może także wystąpić stabilny cykl graniczny.
5.3 Sterowanie w układzie przekaźnikowym z korekcyjnym podatnym sprzężeniem zwrotnym
Strukturalny schemat badanego układu sterowania, w którym zastosowano liniowe korekcyjne sprzężenie zwrotne podatne pokazano na rys. 5.9.
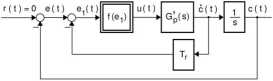
Rys. 5.9. Strukturalny schemat układu sterowania z korekcyjnym sprzężeniem
Schemat ilustrujący zasadę praktycznej implementacji omawianego sprzężenia w przypadku sterowanego obiektu całkująco-inercyjnego (5.1) podano na rys. 5.10.
Wyszukiwarka
Podobne podstrony:
Zdjęcie0620 43. 44. 45. 46. 47. Jesteś klientem restauracji, w której kucharz podczas smażenia fryte
skanuj0005 (86) 42. 43. 44. 45. 46. 47. Które ze stwierdzeń nie charakteryzuje masowego społeczeństw
150% 150% -150% - 37 38 39 40 41 42 43 44 45 46 47 48 ♦ inwestor A
34029102811649743249?3539696 o IdłołM IdłołM 42 43 44 45 46 47 48 49 50 51 52 53 M$0tus acusticus ex
Polska Izba Inżynierów Budownictwa - Krajowa Komisja Kwallfikacyjr 42 43 44 45 47 art.79 Kogo
5 (1754) 39v 40, Z 42* 43, 44, 45, 46, B. 47. 48, 49e 1 (i Niemowlę 7-miesięczne karmione
CCF20080709�048 34,27 28 30,29,31 32 33 34 36,37,30 40 3$ 41 42,43,44 45/i6 47 48 49 50 51 67,68 52
39-41 42-43 44-45 46-48 24,5 25 25,5 7 7,5 8 8,25 8,5 8,75 Długość stopy
43,44,45 4 > iF diagramu l»l-Ksiakiego, l>tiNr pi/rdaiawla poziomy anorgftyczne
więcej podobnych podstron