Politechnika Krakowska im. Tadeusza Kościuszki Katedra Automatyki
i Technik Informacyjnych (E-3)
Automatyka
Laboratorium
– Regulacja dwupołożeniowa –
1. Cel ćwiczenia
Poznanie zasady działania regulatorów dwupołożeniowych na przykładzie układu regulacji
temperatury. Umiejętność identyfikacji obiektu regulacji. Zbadanie wpływu wartości histerezy
regulatora na jakość regulacji. Zamodelowanie układu regulacji w programie symulacyjnym Simulink
.
Zapoznanie się ze sposobem opisu obiektów dynamicznych na przykładzie obiektu inercyjnego I rzędu
z opóźnieniem.
2. Opis teoretyczny regulatora i obiektu z opóźnieniem
W regulacji dwupołożeniowej sygnał sterujący przyjmuje dwie wartości: pełne załączenie
i wyłączenie.
2.1. Regulator
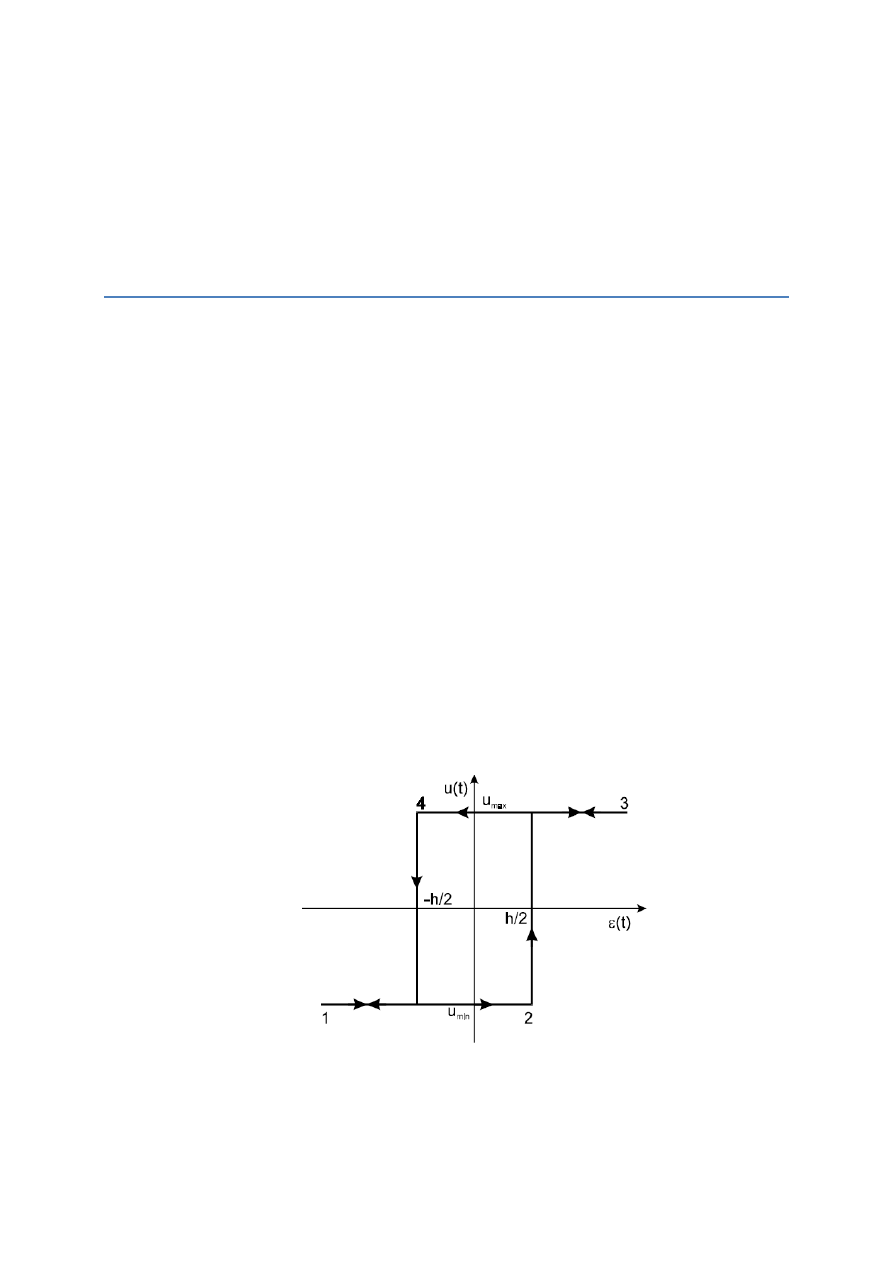
Poniższy rysunek przedstawia charakterystykę regulatora. Na wejście regulatora podawana
jest wartość błędu 𝜀(𝑡), natomiast wyjściem jest sterowanie 𝑢(𝑡).
Rysunek 1 Charakterystyka statyczna regulatora
Wartości 𝑢
𝑚𝑎𝑥
i 𝑢
𝑚𝑖𝑛
oznaczają wartości sterowań: maksymalną i minimalną, gdyż ten typ
regulatorów może posiadać tylko dwa położenia sterowania. Wartość ℎ jest wartością histerezy
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
2
ustawianą potencjometrem (5). Wartość sterowania przyjmuje 𝑢
𝑚𝑖𝑛
w przypadku, gdy błąd znajduje
się w pkt. 1. Jeżeli błąd zaczyna narastać, czyli przesuwa się od pkt. 1 do 2, to w pkt. 2 następuje
przełączenie sterowania na przeciwne. I jeżeli błąd dalej narasta, to sterowanie 𝑢
𝑚𝑎𝑥
jest w dalszym
ciągu utrzymywane. W przypadku zmniejszania się błędu, sterowanie 𝑢
𝑚𝑎𝑥
zostaje przełączone na
sterowanie 𝑢
𝑚𝑖𝑛
jeżeli błąd osiągnie wartość −
ℎ
2
– pkt. 4.
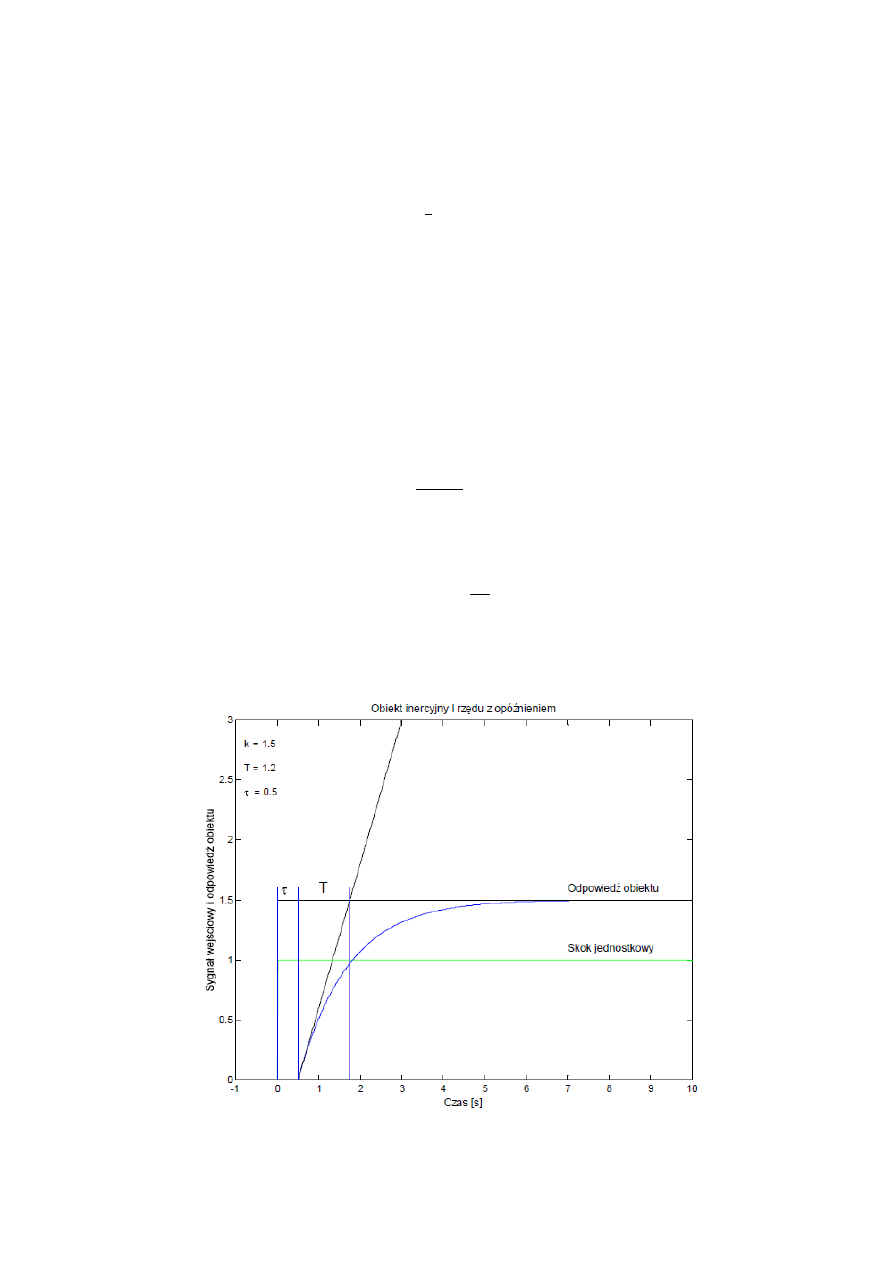
2.2. Obiekt inercyjny I rzędu z opóźnieniem
Obiekt inercyjny I rzędu z opóźnieniem opisany jest równaniem różniczkowym
𝑇𝑦̇(𝑡) + 𝑦(𝑡) = 𝑘𝑢(𝑡 − 𝜏),
(1)
przy czym T jest stałą czasową, k wzmocnieniem obiektu, natomiast parametr 𝜏 reprezentuje
opóźnienie.
Transmitancja takiego obiektu ma postać
𝐺(𝑠) =
𝑘
𝑇𝑠 + 1
𝑒
−𝜏𝑠
(2)
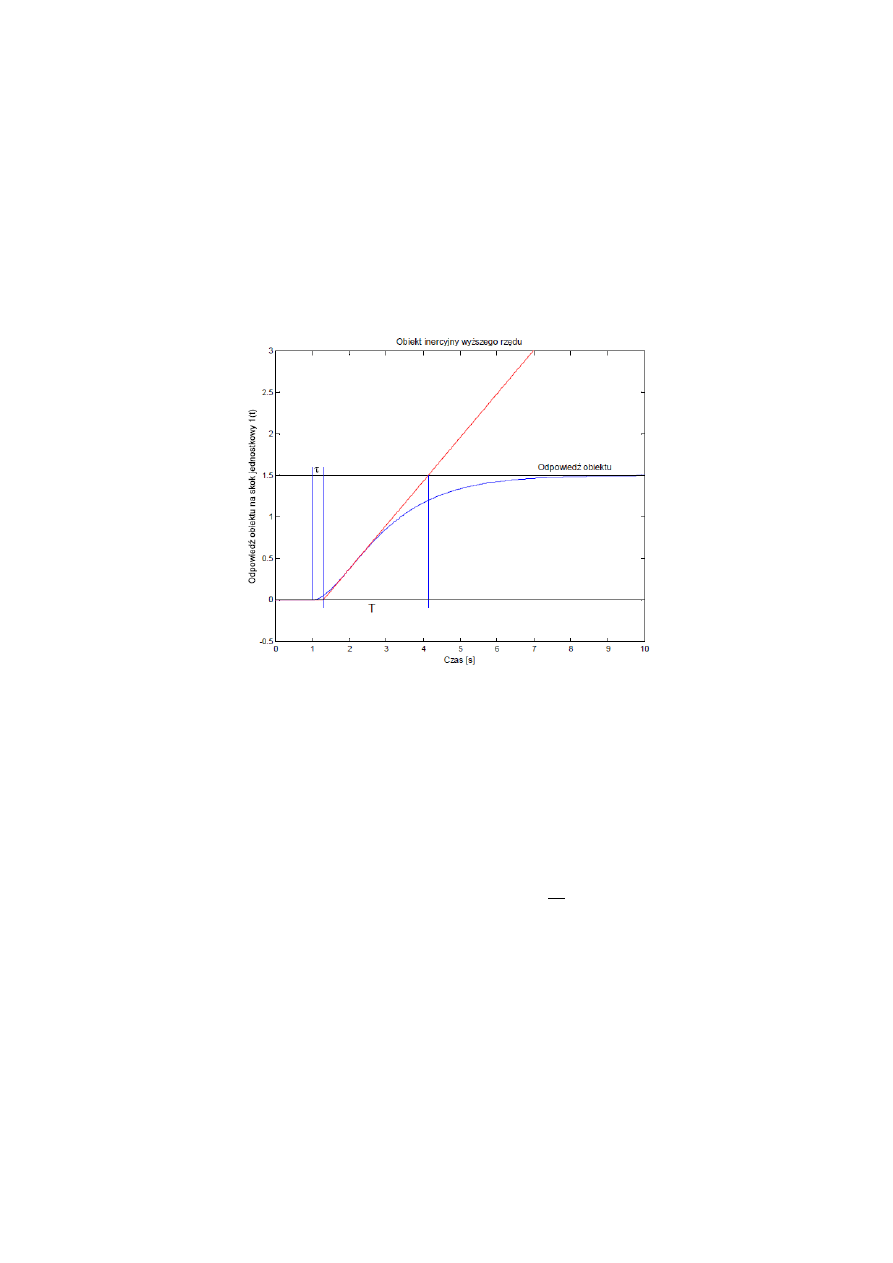
Wzór odpowiedzi na skok jednostkowy został przedstawiony poniżej
𝑦(𝑡) = 𝑘 (1 − 𝑒
𝑡−𝜏
𝑇
)
(3)
Poniższy rysunek przedstawia odpowiedź obiektu inetcyjnego I rzędu z opóźnieniem na skok 1(t).
Rysunek 2 Odpowiedź obiektu inercyjnego I rzędu z opóźnieniem na skok jednostkowy 1(t)
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
3
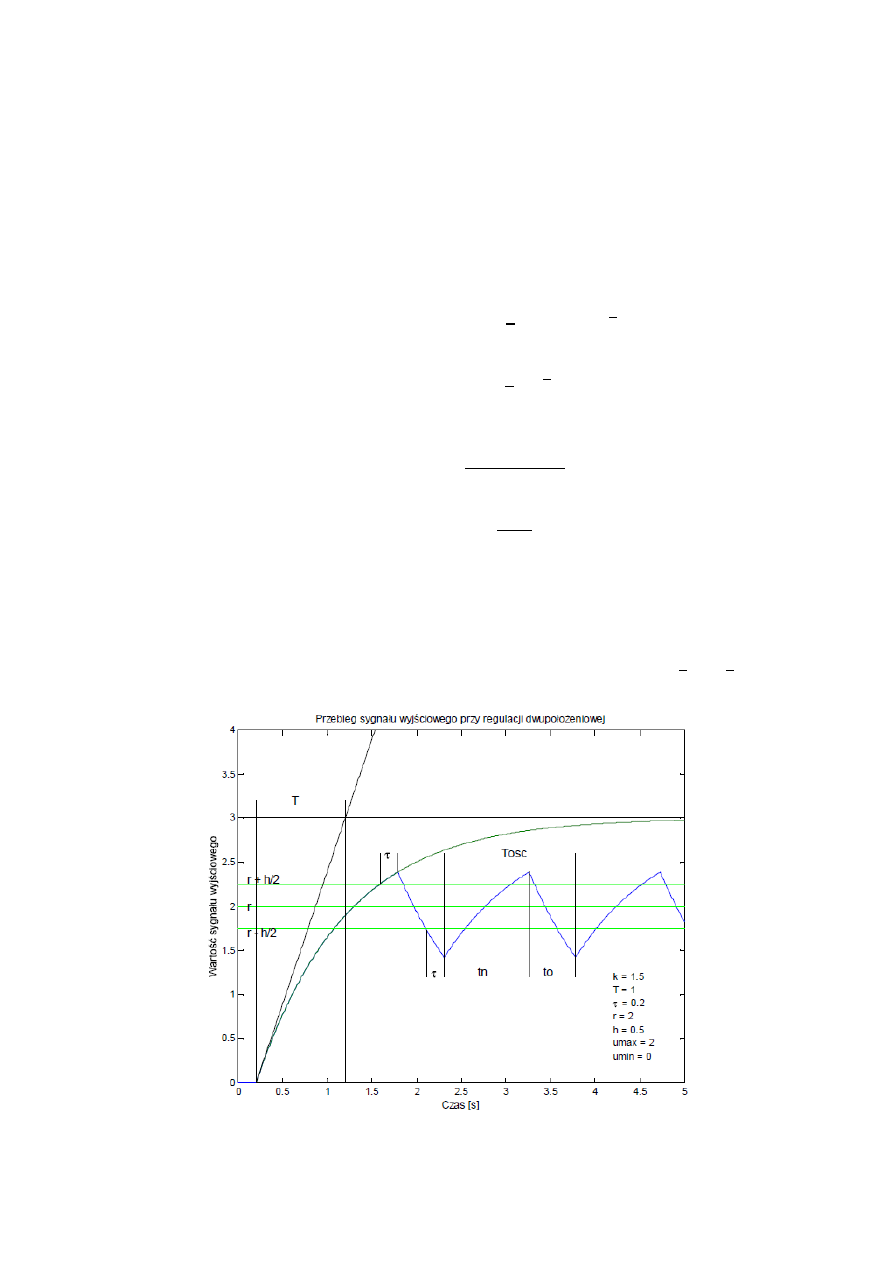
2.3. Regulacja dwupołożeniowa
Po połączeniu elementów: regulator i obiekt wg schematu z rys. 3 i podaniu wartości zadanej,
układ regulacji rozpoczyna swoją prację. Poniżej przedstawiona została symulacja działania układu
regulacji przeprowadzona z wykorzystaniem pakietu MATLAB/Simulink.
Korzystając ze wzorów opisujących model matematyczny oraz regulator można podać
podstawowe wory matematyczne na:
Wartość maksymalną 𝑦
𝑚𝑎𝑥
𝑦
𝑚𝑎𝑥
= 𝑘𝑢
𝑚𝑎𝑥
+ (𝑟 +
ℎ
2
− 𝑘𝑢
𝑚𝑎𝑥
) 𝑒
−𝜏𝑇
(4)
Wartość minimalną 𝑦
𝑚𝑖𝑛
𝑦
𝑚𝑖𝑛
= (𝑟 −
ℎ
2
) 𝑒
−𝜏𝑇
(5)
Czas narastania 𝑡
𝑛
𝑡
𝑛
= 𝑇𝑙𝑛 (
𝑘𝑢
𝑚𝑎𝑥
− 𝑦
𝑚𝑖𝑛
𝑘𝑢
𝑚𝑎𝑥
− 𝑦
𝑚𝑎𝑥
)
(6)
Czas opadania 𝑡
𝑜
𝑡
𝑜
= 𝑇𝑙𝑛 (
𝑦
𝑚𝑎𝑥
𝑦
𝑚𝑖𝑛
)
(7)
Czas oscylacji
𝑇
𝑜𝑠𝑐
= 𝑡
𝑜
+ 𝑡
𝑛
(8)
Na rysunku zamieszczonym poniżej przedstawiony został wykres 𝑦(𝑡) z załączinym
regulatorem. Zaznaczone zostały również wartość zadana 𝑟 oraz obszar histerezy 𝑟 +
ℎ
2
i 𝑟 −
ℎ
2
.
Rysunek 3 Przebieg y(t) przy regulacji dwupołożeniowej
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
4
Dla obiektu i regulatora o parametrach podanych na rys. 6 wielkości opisane równaniami (4) – (8)
przyjmują następujące wartości: y
max
=2.39, y
min
=1.43, t
n
=0.94 s., t
o
=0.51 s., a T
osc
=1.45 s.
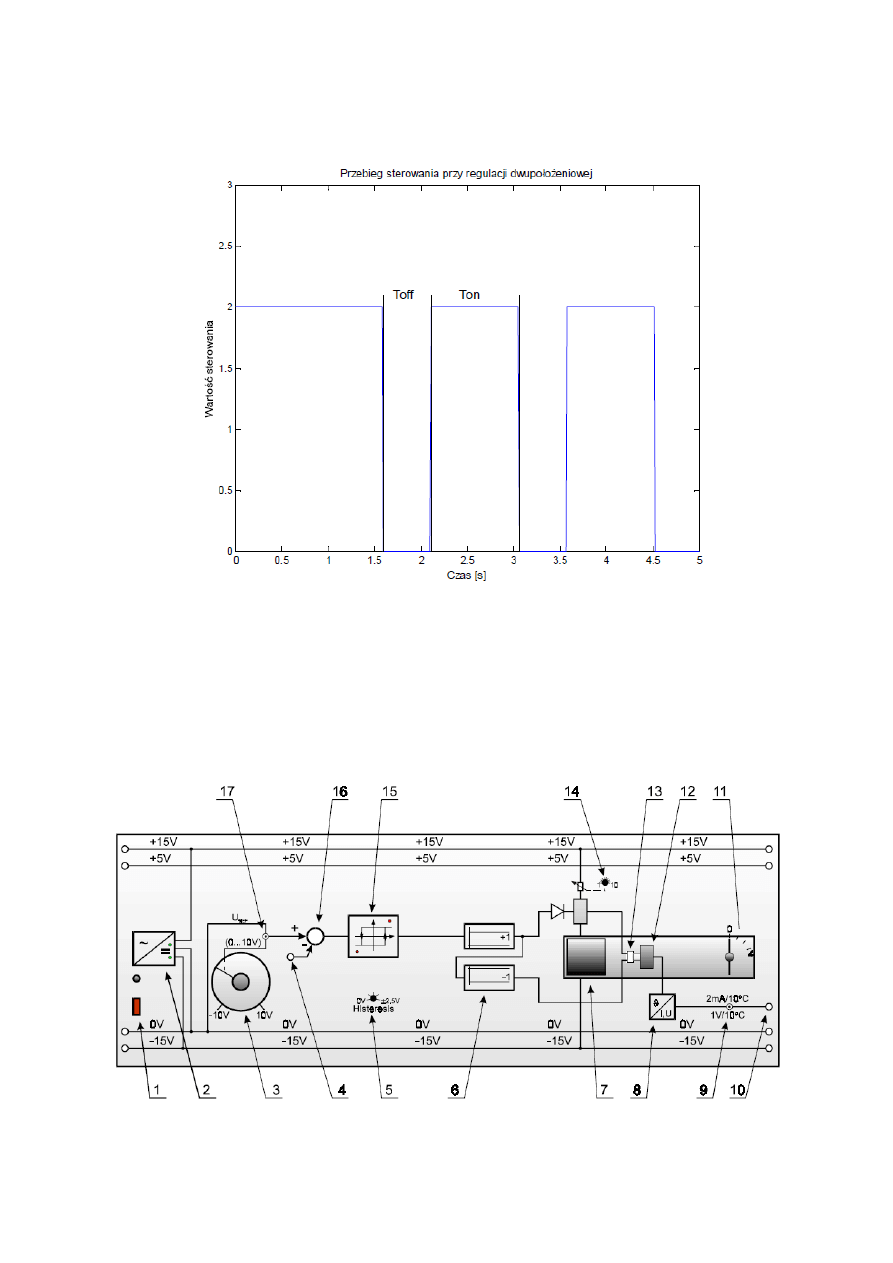
Rysunek 4 Przebieg u(t) przy regulacji dwupołożeniowej’
Rys. 4 przedstawia wykres 𝑢(𝑡), czyli działanie regulatora. Porównując rysunki 3 i 4 można dojść do
wniosku, że T
off
– czas wyłączania sterowania ma taką samą wartość jak czas t
o
, natomiast T
on
– czas
włączenia sterowania taką samą wartość, jak t
n
.
3. Podłączenie stanowiska, sposób pomiaru i przeprowadzenie obliczeń
3.1. Schemat stanowiska
Rysunek 5 Schemat stanowiska
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
5
Przy wykonywaniu ćwiczenia może okazać się pomocny opis stanowiska laboratoryjnego
zamieszczonego na rys.5. Przycisk (1) służy do włączenia napięcia na stanowisku. Po załączeniu
przycisku (1) zasilacz (2) podaje napięcie +15 V, -15V oraz „zero”. Potencjometrem (3) można ustawić
wartość zadaną napięcia, które podawane jest następnie na węzeł sumacyjny (16). Przełącznik (17)
służy do podawania na dodatnie wejście węzła sumacyjnego wartości zadanej napięcia, lub „zera”.
Wejście (4) służy do podłączenia sygnału wyjściowego z obiektu, tzn. sygnału napięciowego
reprezentującego aktualną temperaturę. Potencjometrem (5) można regulować histerezę regulatora
dwupołożeniowego (15). Cyfrą (6) zostały oznaczone elementy eletroniczne kształtujące napięcie
sterujące. Za pomocą wentylatora (7) można wymuszać obieg powietrza w obiekcie. Prędkość
obrotową wentylatora, a jednocześnie prędkość powietrza można regulować wykorzystując
potencjometr (14). Układ (8) służy do przekształcania pomiaru fizuycznego temperatury na
odpowiadający jej sygnał napięciowy w stosunku 1V/10
o
C. Przekształcony sygnał podawany jest
następnie na wyjście (10). Klapa (11) służy do regulacji ilości powietrza wymienianego między
obiektem a otoczeniem. Na radiatorze (12) znajduje się element pomiarowy, mierzący temperaturę
powietrza podgrzanego przez żarówkę (13).
3.2. Połączenie elementów – identyfikacja i regulacja
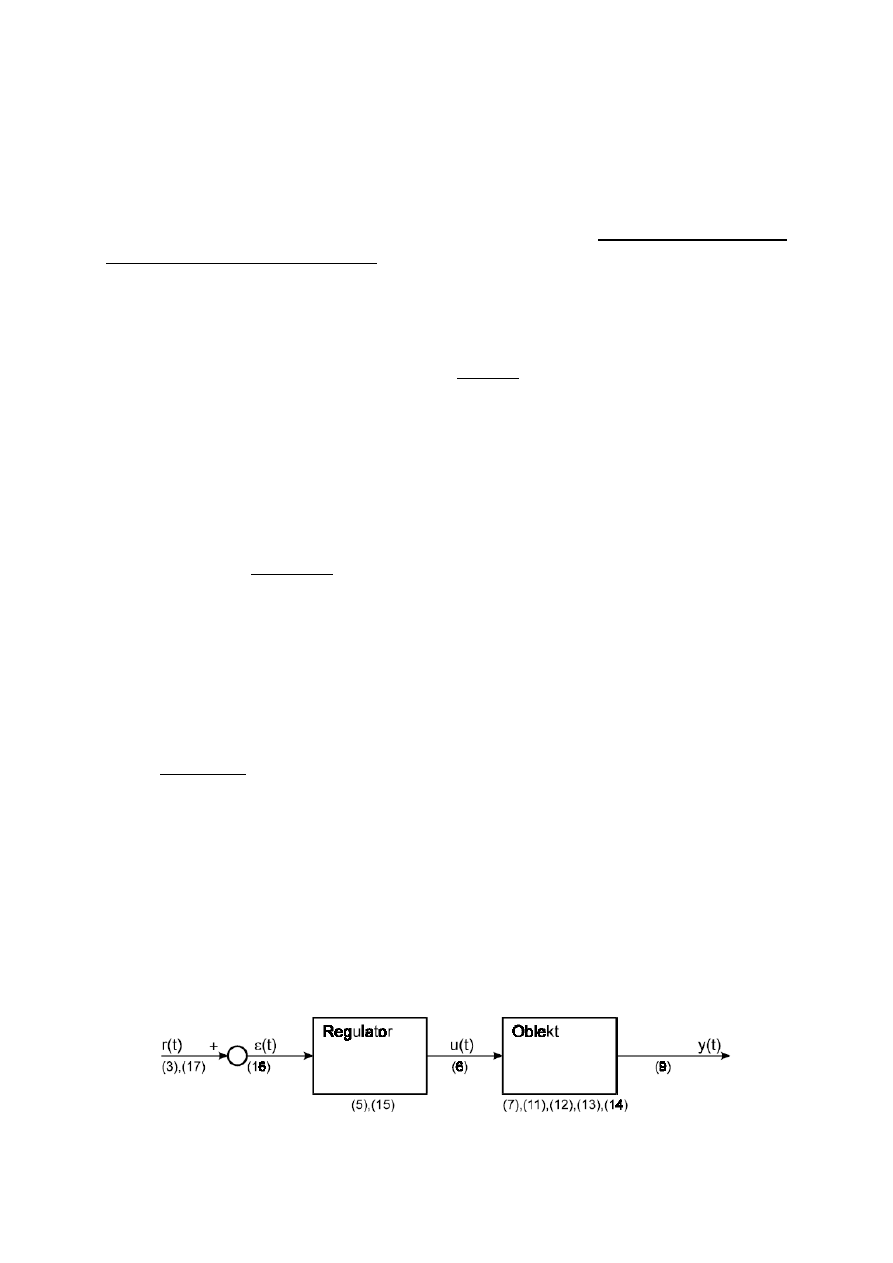
Na rysunkach 2 i 3 𝑟(𝑡) oznacza funkcję wartości zadanej, 𝜀(𝑡) – błąd regulacji, 𝑢(𝑡) –
sterowanie, a 𝑦(𝑡) reprezentuje temperaturę wyjściową obiektu już po przekształceniu na napięcie.
W przypadku identyfikacji obiektu należy połączyć układ wg schematu z rys. 6, czyli należy:
a) przełączyć przełącznik (17) na sygnał „zero”. Wartość zadaną ustawić na maksimum.
Następnie ustawić minimalną wartość histerezy potencjometrem (5) oraz ustawić
przełącznikiem (9) sygnał pomiarowy na napięciowy.
b) Ustawienia obiektu, tzn. prędkość wentylatora (7), ustawienie klapy (11) wykonać wg
wskazówek prowadzącego.
c) Do wyjścia (10) należy podłączyć wejście sygnałowe woltomierza. „Zero” woltomierza należy
połączyć z „zerem” obiektu. Po wykonaniu tych czynności można załączyć układ i przystąpić do
identyfikacji.
d) Po stwierdzeniu, że obiekt osiągnął swą najniższą temperaturę, można załączyć przełącznikiem
(17) maksymalną wartość zadaną, która podawana jest z potencjometru (3) i przystąpić do
rejestracji pomiarów.
e) W przypadku, gdy temperatura nie będzie już zmieniać swej wartości, lub będzie się ta wartość
zmieniać w niewielkich granicach można zakończyć identyfikację.
f) Na koniec należy „schłodzić” obiekt. Proces ten zostanie zakończony jeżeli napięcie
odczytywane z woltomierza nie będzie się już zmieniać, lub będzie się zmieniać w niewielkich
granicach.
Rysunek 6 Schemat połączenia w przypadku identyfikacji
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
6
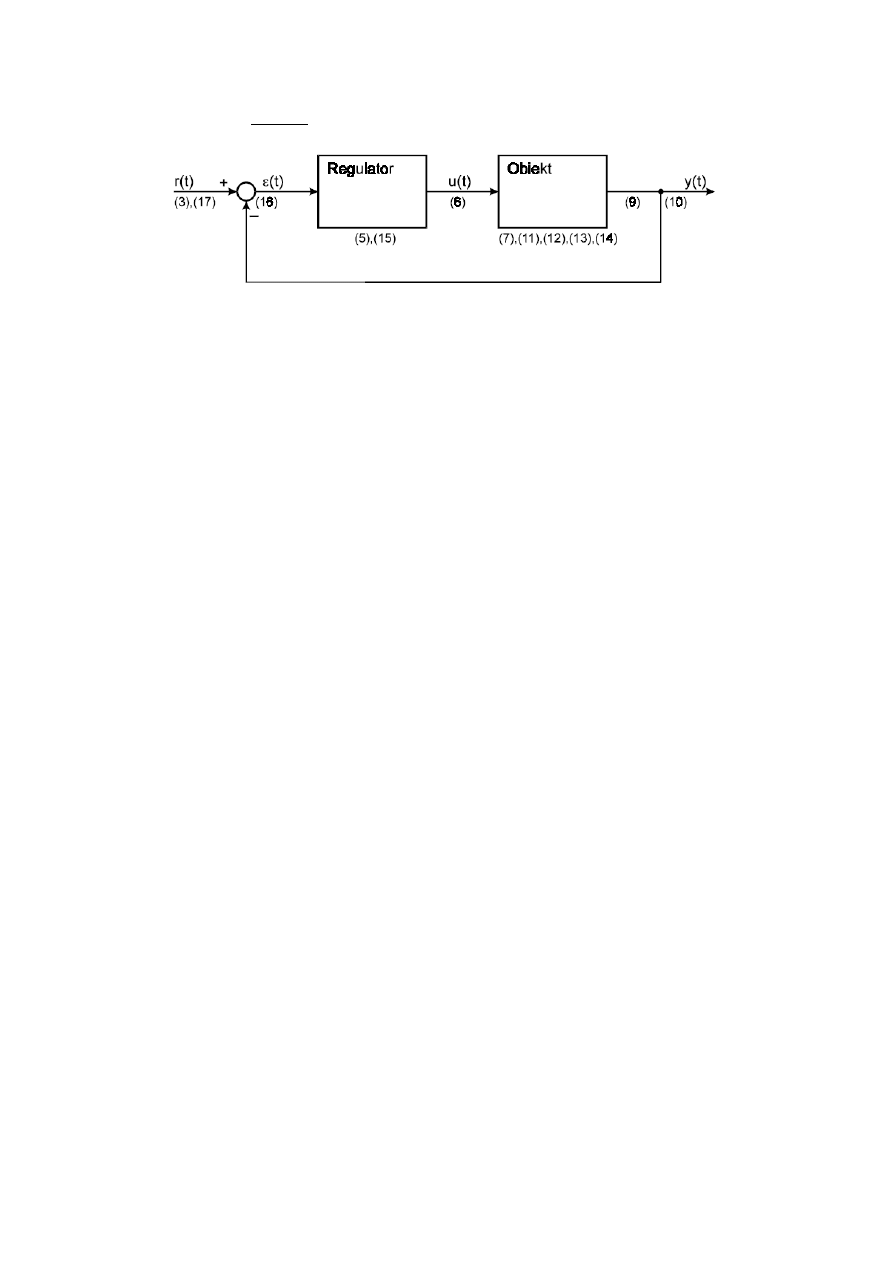
W przypadku regulacji układ należy połączyć wg schematu zamieszczonego poniżej.
Rysunek 7 Schemat połączenia w przypadku regulacji
a) Należy połączyć wyjście obiektu (10), czyli pomiar temperatury z wejściem sumatora (16)
o znaku „-”.
b) Następnie należy ustawić za pomocą potencjometru (3) wartość zadaną napięcia oraz
wartość histerezy regulatora – potencjometr (5). Prowadzący podaje odpowiednie
wartości nastaw.
c) Po wykonaniu tych czynności i po sprawdzeniu układu przez prowadzącego zajęcia można
załączyć stanowisko laboratoryjne i rozpocząć rejestrację pomiarów.
d) Należy zmierzyć temperaturę podczas dwóch pełnych cykli ogrzewanie – chłodzenie.
Obiekt ma zatem kolejno: ogrzewać się – schładzać – ogrzewać się – schładzać poprzez
automatyczne załączanie się / wyłączanie regulatora dwupołożeniową zgodnie
z częstotliwością zdefiniowaną poprzez wartość histerezy.
e) Zapisać należy wartości temperatury w kolejnych odstępach czasu, wartość zadaną
(podaną przez prowadzącego) oraz wartość histerezy (podaną przez prowadzącego)
3.3. Symulacje komputerowe
Następnie należy zbudować w/w układ regulacji w środowisku MATLAB/Simulink przy użyciu
bloków funkcyjnych wskazanych przez prowadzącego. Wyniki symulacji trzeba zachować na potrzeby
sporządzenia sprawozdania.
4. Sprawozdanie
Forma sprawozdania oraz aspekty, które powinny zostać w nim wymienione, obliczone i opisane
przedstawione zostały poniżej.
1. Wstęp
o regulacji dwupołożeniowej min. 0,5 strony
2. Przebieg ćwiczenia
Jaki był przebieg ćwiczenia krok po kroku (własnymi słowami)
Co było obiektem regulacji
Jak wyglądały pomiary, jakie były wartości zadane
Jaka wielkość jest mierzona
Ile było cykli pomiarowych
Itp.
3. Wyniki pomiarów
Tabele z wynikami pomiarów
Opisane jednostki
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
7
4. Opracowanie wyników
4.1. Identyfikacja obiektu
Wykres odpowiedzi obiektu inercyjnego na wymuszenie skokowe Temp=f(czas)
o Wykres punktowy z przeprowadzoną linią trendu – nie stosować linii łamanej!
o Opisane osie wykresu wraz z jednostkami, tytuł wykresu
o Narzędzia do tworzenia wykresów: MATLAB (preferowany), MS Excel, itp.
Po dokonaniu identyfikacji otrzymaną odpowiedź obiektu przybliżyć można modelem obiektu
inercyjnego I rzędu z opóźnienie. Można do tego użyć aproksymację Kupfmullera.
Rysunek 8 Metoda aproksymacji Kupfmullera
Metoda ta polega na przeprowadzeniu stycznej w punkcie przegięcia odpowiedzi na skok
jednostkowy 1(t). Styczna ta odcina na osi czasu 𝑡 wartość zastępczego czasu opóźnienia 𝜏
𝑧
oraz na
prostej 𝑦(𝑡) = 𝑘 wartość stałej czasowej T.
Z wykresu wyznaczyć stałą czasową T
o Nanieść na wykres sposób wyznaczania stałej czasowej T
Z wykresu wyznaczyć współczynnik wzmocnienia k
𝑘 =
ℎ
𝑢
𝑢
Gdzie hu – wartość ustalona, u – amplituda wymuszenia
Zapisać postać transmitancji obiektu inercyjnego I rzędu z wyznaczonymi współczynnikami k,T
Symulacja komputerowa prezentująca odpowiedź obiektu inercyjnego I rzędu (Simulink)
o Przyjąć parametry k,T obiektu wyznaczone wcześniej
o Przedstawić schemat symulacyjny – obrazek powinien być podpisany
Napisać wartości parametrów użytych przy symulacji (każdego bloczka)
o Wykres otrzymany na podstawie symulacji (z bloczka ‘to workspace’)
Opisane osie wraz z jednostkami
Zaznaczona wartość ustalona
Zaznaczona stała czasowa i styczna
Automatyka
mgr inż. P. Pytlik, KAiTI (E-3)
8
4.2. Charakterystyka pracy (regulacja)
Przebieg charakterystyki pracy przy regulacji dwupołożeniowej na podstawie pomiarów
Temp=f(czas)
o Wykres punktowy z przeprowadzoną linią trendu – nie stosować linii łamanej!
o Opisane osie wykresu wraz z jednostkami, tytuł wykresu
o Narzędzia do tworzenia wykresów: MATLAB (preferowany), MS Excel, itp.
o Na wykresie zaznaczyć wszystkie charakterystyczne wielkości podane w instrukcji
laboratoryjnej (obszar histerezy, okres oscylacji, czas opadania, czas narastania, itd.).
Rozwinięcie symboli powinno znajdować się pod wykresem
Przebieg charakterystyki pracy przy regulacji dwupołożeniowej na podstawie symulacji
w Simulinku
o Przyjąć parametry k,T obiektu wyznaczone wcześniej
o Przyjąć wartości histerezy i wartości zadanej takie, jak podczas pomiarów
o Przedstawić schemat symulacyjny – obrazek powinien być podpisany
Napisać wartości parametrów użytych przy symulacji (każdego bloczka)
o Wykres otrzymany na podstawie symulacji (z bloczka ‘to workspace’)
Opisane osie wraz z jednostkami
Zaznaczona wartość ustalona
Zaznaczone wielkości charakterystyczne
Przebieg charakterystyki pracy przy regulacji dwupołożeniowej na podstawie symulacji
w Simulinku dla histerezy większej i mniejszej niż poprzednio
o Przyjąć histerezę mniejszą niż ta używana podczas pomiarów (napisać jaką wartość
histerezy przyjęto)
o Narysować wykres i opisać go zgodnie z punktem wyżej
o Przyjąć histerezę większą niż ta używana podczas pomiarów
o Narysować wykres i opisać go zgodnie z punktem wyżej
Obliczenia
o Zgodnie ze wzorami zamieszczonymi w instrukcji laboratoryjnej, wykorzystując
wyznaczone parametry obiektu, wartość zadaną, wartość histerezy oraz maksymalną
wartość napięcia sterującego należy obliczyć charakterystyczne wielkości: wartość
minimalna, wartość maksymalna, czas opadania, czas narastania.
o Przyjąć wartości histerezy i wielkości zadanej takie, jak podczas pomiarów oraz
opóźnienie 𝜏 = 0
5. Wnioski
Ogólne wnioski z wykonanego ćwiczenia
Porównanie przebiegów odpowiedzi obiektu inercyjnego I rzędu otrzymane na podstawie
symulacji i pomiarów. Skąd mogą wynikać ewentualne różnice
Porównanie przebiegów charakterystyki pracy otrzymanej na podstawie symulacji i pomiarów.
Skąd mogą wynikać ewentualne różnice
Porównanie wielkości charakterystycznych odczytanych z wykresów charakterystyki pracy
w wielkościami obliczonymi ze wzorów. Skąd mogą wynikać ewentualne różnice.
Porównanie charakterystyk pracy dla różnych histerez. Jak zmiana histerezy wpływa na regulację
dwupołożeniową? Jak wpływa na jakość regulacji, żywotność regulatora. Itp.
Wyszukiwarka
Podobne podstrony:
cw 7?danie ukladow regulacji dwupolozeniowej
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
9 regulacja dwupolozeniowa
04A Badanie regulacji dwupołożeniowej
sprawozdanie regulacja dwupołożeniowa-pomiary i wykresy
cw 7?danie ukladow regulacji dwupolozeniowej
Analiza nieliniowego układu automatycznej regulacji - dwupołożeniowa regulacja temperatury(1) , Cel
Regulacja dwupołozeniowa 1
Regulacja dwupołożeniowa 1
Regulacja dwupołożeniowa
Prosty układ regulacji dwupołożeniowej
Regulacja dwupolozeniowa, Księgozbiór, Studia, Maszynoznastwo i Automatyka
regulacja dwupołożeniowa 10, W Y ? S Z A_
Podstawy Automatyki Lab 2010 CW5 Regulator dwupołoże
5 regulacja dwupolozeniowa
Instrukcja do ćw 20 Regulacja dwupołożeniowa temperatury – symulacja komputerowa
BADANIE UKŁADU REGULACJI DWUPOŁOŻENIOWEJ
Regulacja dwupołozeniowa
więcej podobnych podstron