
Sławomir Kulesza
Cyfrowe przetwarzanie sygnałów (8)
Wykład dla studentów I roku (N)SMU WMiI
Specjalność: Techniki multimedialne
1 (39)

Wymierna z-transformata
W przypadku analizowanych układów LTI czasu dyskretnego, wszystkie
stosowane z-transformaty są funkcjami wymiernymi zmiennej z
-1
, czyli ułamkami
postaci:
H z =
P z
D z
=
p
0
p
1
z
−
1
p
2
z
−
2
... p
M
z
−
M
d
0
d
1
z
−
1
d
2
z
−
2
...d
N
z
−
N
Lub równoważnie:
H z=z
N −M
p
0
z
M
p
1
z
M −1
p
2
z
M −2
... p
M
d
0
z
N
d
1
z
N −1
d
2
z
N −2
...d
N
2 (39)

Zera i bieguny z-transformaty
Wymierna z-transformata może być również przedstawiona w postaci iloczynowej:
H z =
p
0
d
0
⋅
∏
k =1
M
1−z
k
z
−
1
∏
k =1
N
1− p
k
z
−
1
=
G z
N −M
∏
k =1
M
z−z
k
∏
k =1
N
z− p
k
gdzie wartości {z
1
, z
2
, ..., z
M
} będące pierwiastkami licznika zwane są zerami
funkcji H(z) (zeros), zaś wartości {p
1
, p
2
, ..., p
N
} będące pierwiastkami mianownika
zwane są biegunami funkcji H(z) (poles).
Zauważmy, że:
H z
k
=
0 ; H p
j
=±∞
3 (39)
Wykres zer i biegunów
Graficzne przedstawienie funkcji H(z) na płaszczyźnie zespolonej nosi nazwę
wykresu zerowo-biegunowego (pole-zero plot), na którym bieguny zaznacza się
krzyżykami (x), zaś zera kółeczkami (o). Bieguny lub zera wielokrotne opisywane
są przez podanie odpowiedniej liczby w ich sąsiedztwie. Z definicji, wszystkie
bieguny i zera umiejscowione są poza obszarem zbieżności z-transformaty
(ROC).
4 (39)
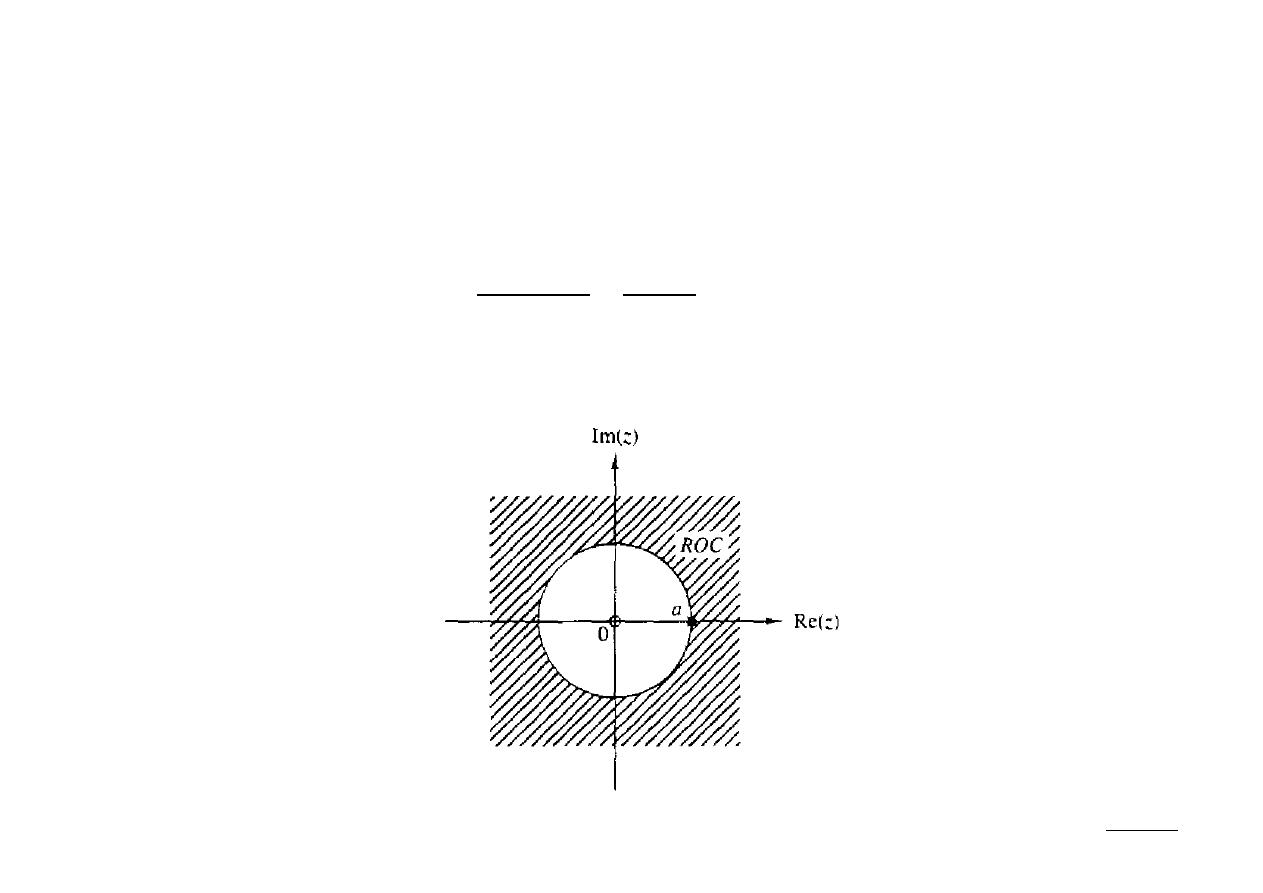
Ex.: Sporządzić wykres biegunów i zer dla sygnału:
x [n]=a
n
u[n] , a0
z-transformata sygnału x[n] ma postać:
X z =
1
1−az
−
1
=
z
z−a
; ROC :∣z∣a
Wynika stąd, że z-transformata posiada 1 biegun (p
1
= a) oraz 1 zero (z
1
= 0).
5 (39)
Ex.: Sporządzić wykres biegunów i zer dla sygnału:
x [n]=a
n
u[n]−u[n−M ]
, a0
z-transformata sygnału x[n] ma postać:
X z =
∑
n=0
M −1
az
−
1
n
=
1−az
−
1
M
1−az
−
1
=
z
M
−
a
M
z
M −1
z−a
Ponieważ a > 0, więc mianownik z-transformaty posiada w ogólności
M-pierwiastków:
z
k
=
a e
i 2 k
M
; k=0,1, 2,... , M −1
Okazuje się jednak, że zero dla z
0
= a kasuje biegun dla p
0
= a, skąd
otrzymujemy:
X z=
z−z
1
z−z
2
... z−z
M −1
z
M −1
6 (39)
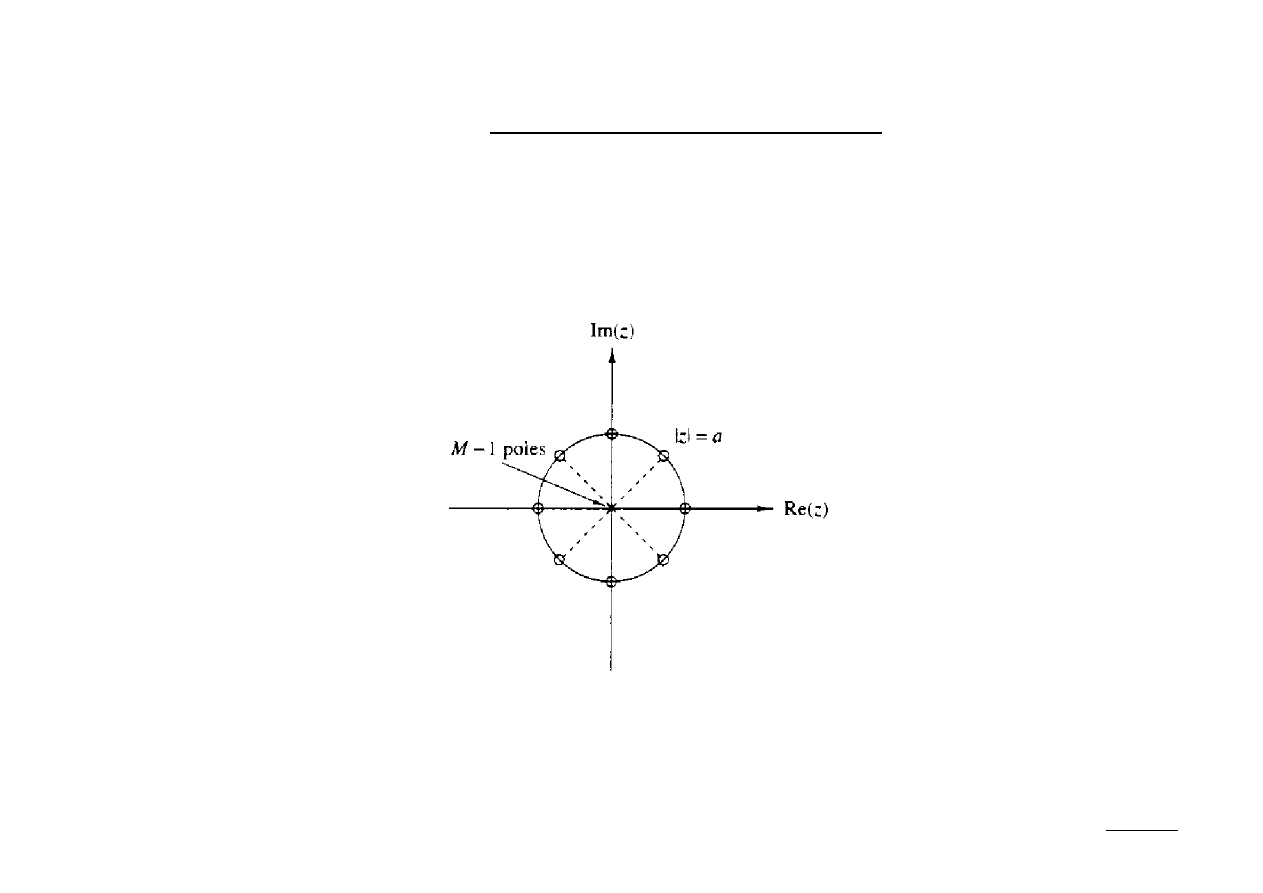
X z =
z−z
1
z−z
2
... z−z
M −1
z
M −1
Powyższa funkcja posiada (M-1)-zer oraz biegunów ulokowanych jak na
poniższym rys. (M = 8):
Zauważmy, że ROC jest całą płaszczyzną zespoloną za wyjątkiem początku
układu, w którym ulokowano (M-1)-biegunów z-transformaty.
7 (39)
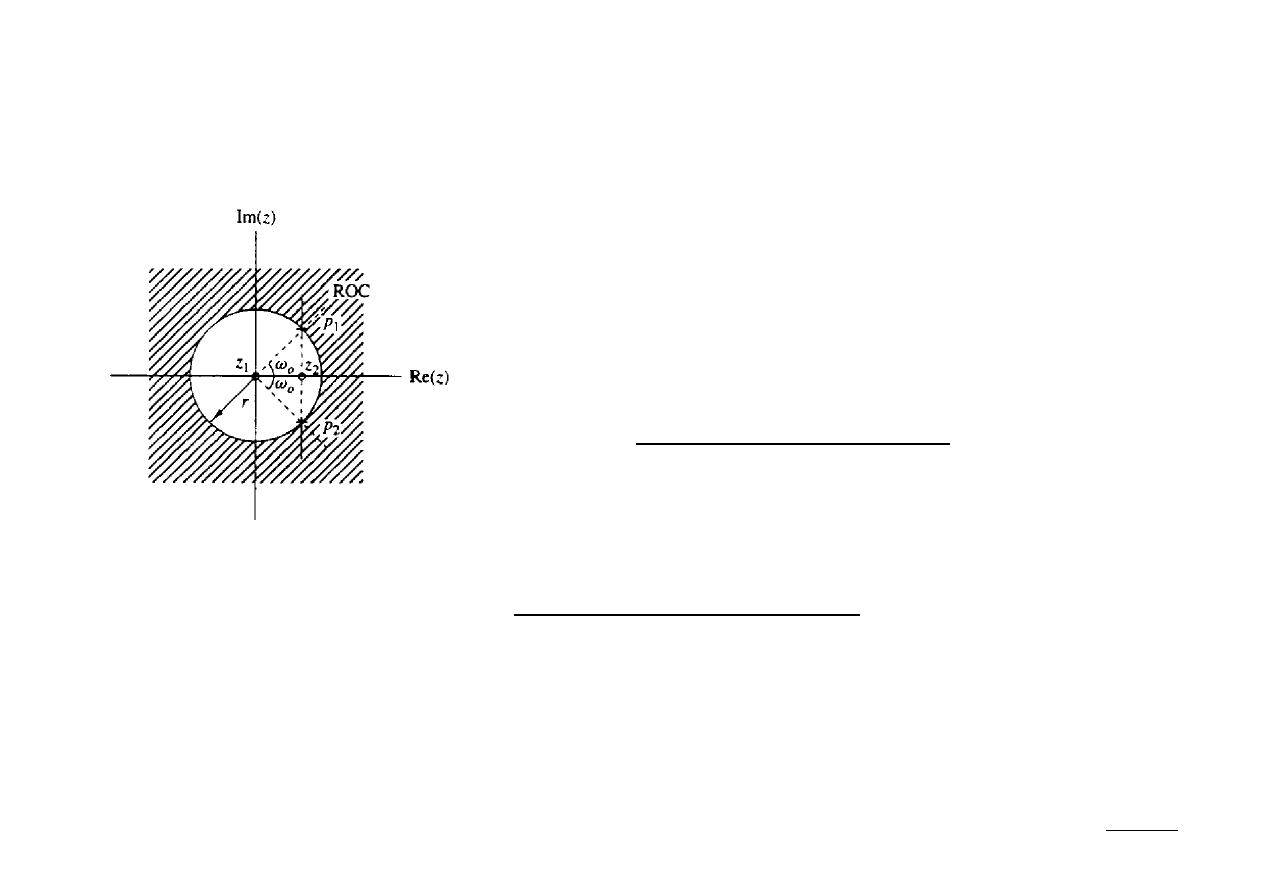
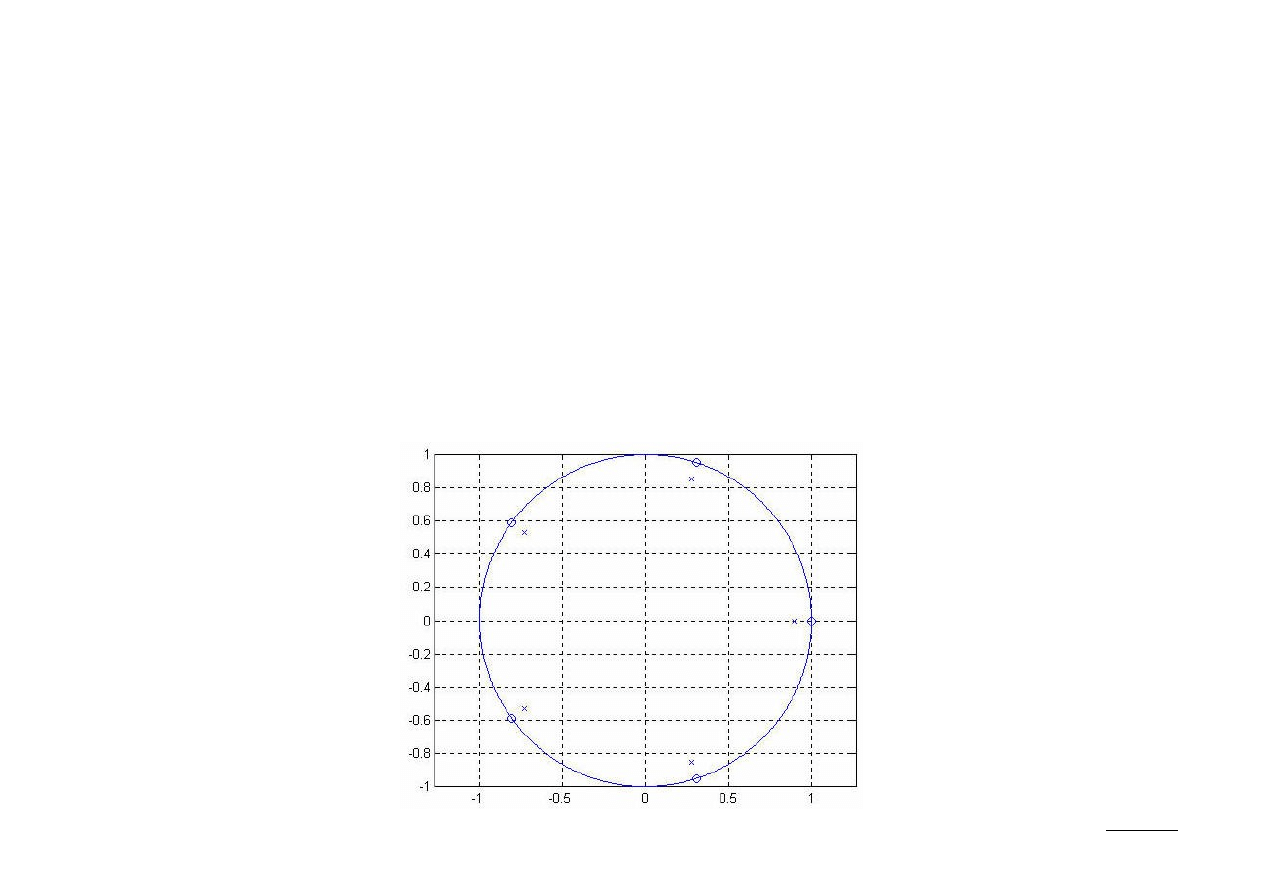
Ex.: Wyznaczyć z-transformatę oraz sygnał odpowiadający wykresowi zer
i biegunów jak na poniższym rysunku:
Układ ma dwa zera (M=2): z
1
= 0, z
2
= r cos ω
0
, oraz
dwa bieguny (N=2): p
1
= r e
iω0
, p
2
= r e
-i ω0
.
Po podstawieniu tych wartości, z-transformata
przyjmuje postać:
X z =G
z⋅ z−r cos
0
z−r e
i
0
z−r e
−
i
0
; ROC :∣z∣r
Po uporządkowaniu:
X z =
1−r z
−
1
cos
0
1−2 r z
−
1
cos
0
r
2
z
−
2
Skąd po porównaniu z tablicami par z-transformat otrzymujemy, że:
x [n]=G r
n
cos
0
nu[ n]
8 (39)

Położenie biegunów a charakterystyka czasowa sygnałów
przyczynowych
Przeanalizujmy zależności pomiędzy położeniem biegunów na płaszczyźnie
zmiennej zespolonej z a kształtem sygnału w dziedzinie czasu, ograniczając się
do rzeczywistych sygnałów przyczynowych.
Okazuje się, iż charakterystyczne zachowanie sygnałów przyczynowych zależy od
położenia biegunów względem koła jednostkowego (koła o promieniu |z| = 1).
Z ostatniego przykładu wynika przy tym, iż aby wielomian posiadał współczynniki
rzeczywiste, jego pierwiastki muszą być albo liczbami rzeczywistymi, bądź też
muszą występować jako pary sprzężone i dlatego analizie poddane zostaną
następujące przypadki: 1 biegun pojedynczy, 1 biegun podwójny, para biegunów
sprzężonych.
9 (39)
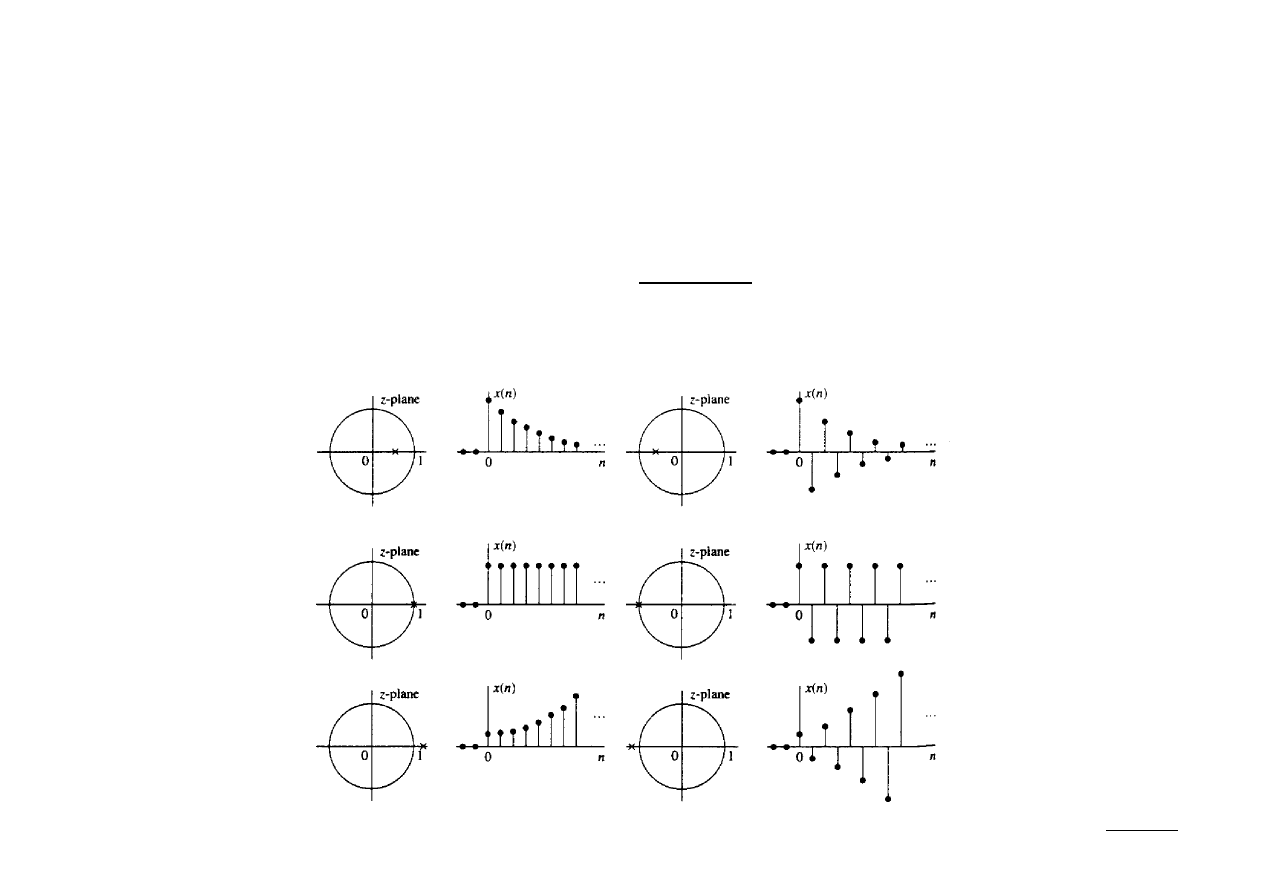
(1) Sygnał rzeczywisty z z-transformatą o 1 biegunie:
W takim przypadku biegun musi być liczbą rzeczywistą (leży na osi Re(z) – brak
pary sprzężonej). Jedynym sygnałem spełniającym taki warunek jest para:
x [n]=a
n
u[n]⇔ X z=
1
1−az
−
1
; ROC :∣z∣∣a∣
Posiada ona zero dla z
1
= 0 oraz biegun dla p
1
= a.
10 (39)
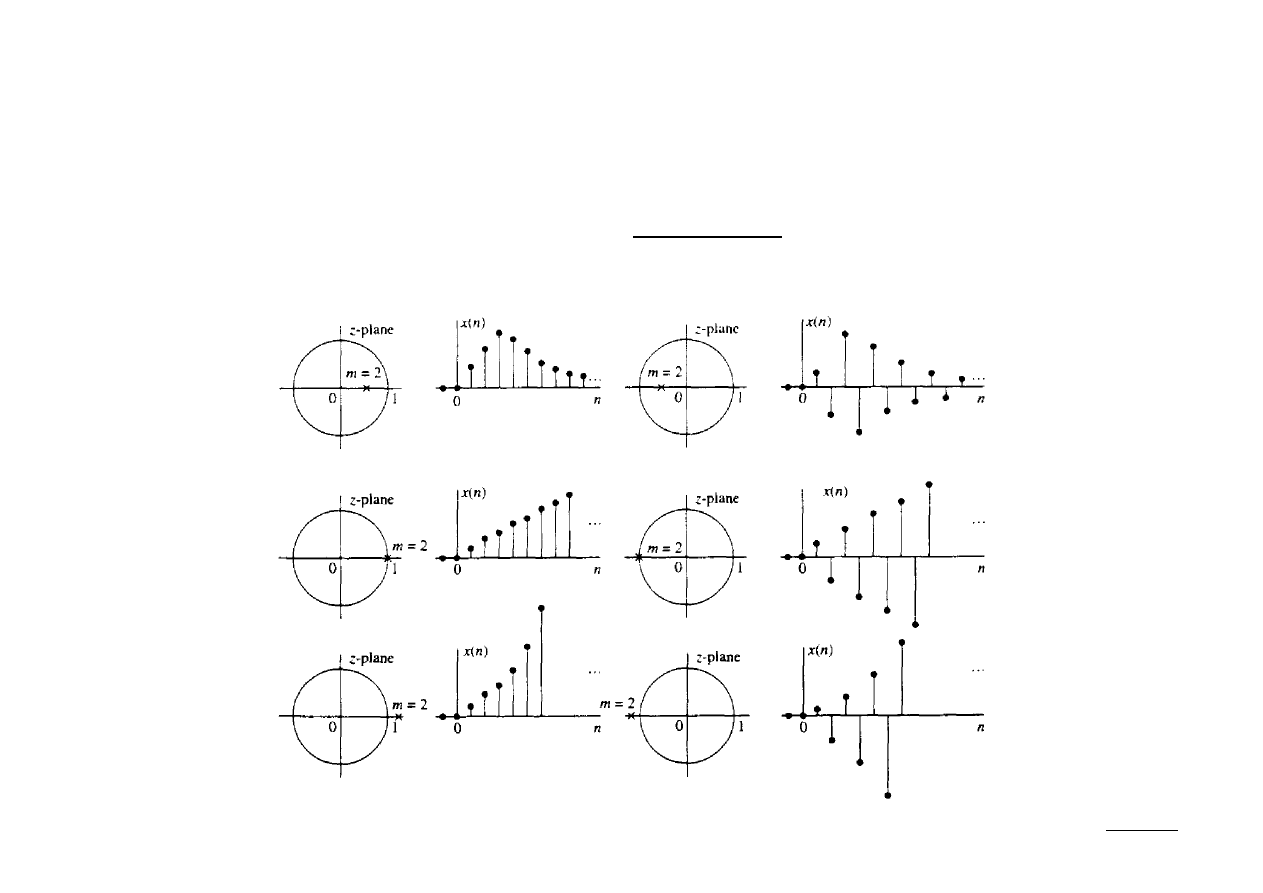
(2) Sygnał z z-transformatą o podwójnym biegunie rzeczywistym:
Przyczynowy sygnał rzeczywisty tego typu ma postać:
x [n]=n a
n
u[ n]⇔ X z =
az
−
1
1−az
−
1
2
; ROC :∣z∣∣a∣
11 (39)
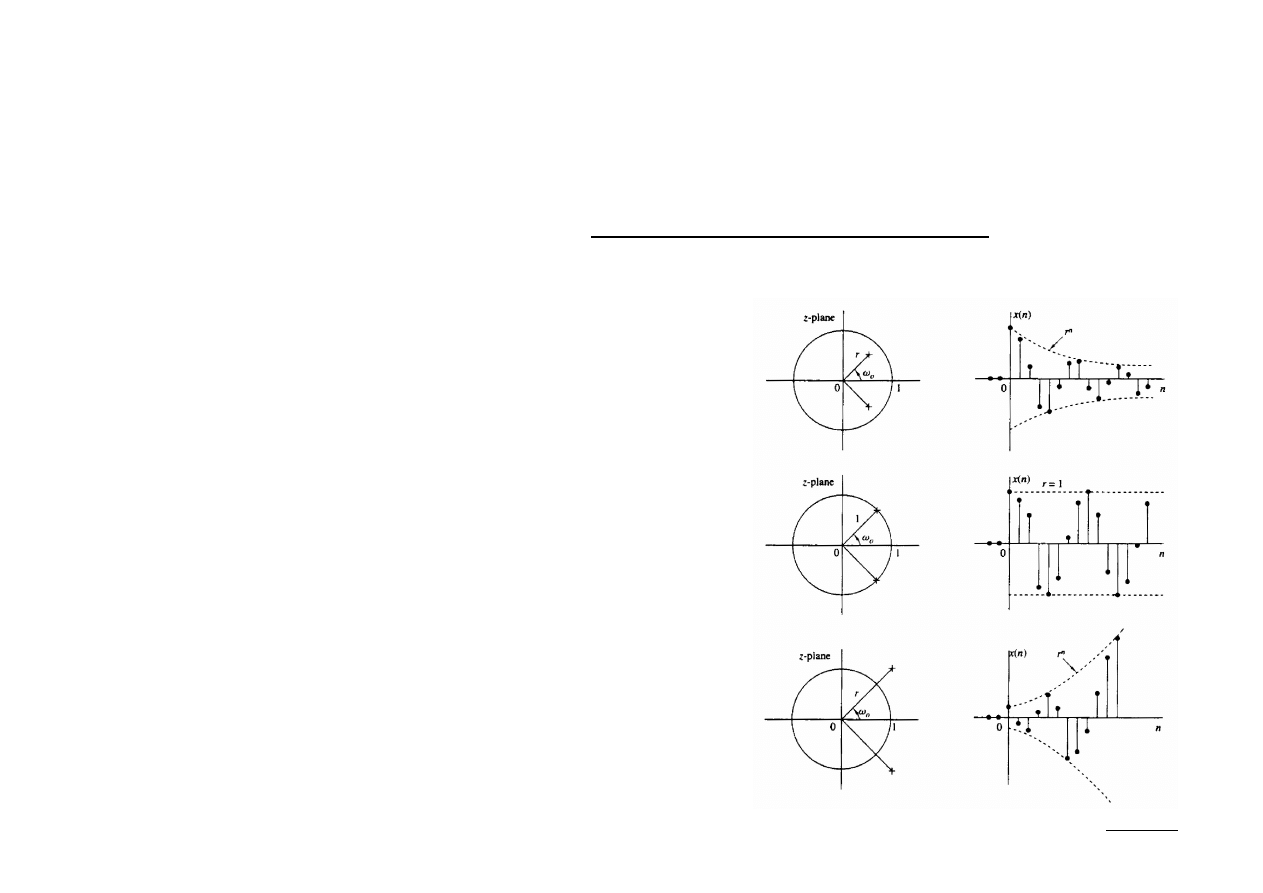
(3) Sygnał rzeczywisty z z-transformatą o parze biegunów sprzężonych:
Przyczynowy sygnał rzeczywisty ma postać:
x [n]=a
n
cos
0
nu[ n]⇔ X z =
1−az
−
1
1−2 a z
−
1
cos
0
na
2
z
−
2
; ROC :∣z∣∣a∣
Odległość biegunów od początku układu określa
obwiednię sygnału, zaś kąt do osi Re(z) – jego
częstotliwość.
12 (39)

Położenia biegunów sygnałów przyczynowych – wnioski
–
Bieguny modyfikują zachowanie sygnału znacznie silniej niż zera.
–
Rzeczywiste sygnały przyczynowe o pojedynczych biegunach rzeczywistych lub
pojedynczych parach biegunów sprzężonych położonych wewnątrz koła
jednostkowego lub na jego obwodzie, są zawsze ograniczone w amplitudzie.
–
Bieguny położone bliżej początku układu współrzędnych powodują szybszy
zanik sygnału niż bieguny położone przy obwodzie koła jednostkowego
(ale w jego wnętrzu).
–
Układy LTI o odpowiedzi impulsowej (sygnał przyczynowy) z biegunami
leżącymi poza kołem jednostkowym są niestabilne – ich odpowiedź impulsowa
nie jest bezwzględnie sumowalna.
13 (39)

Funkcja przenoszenia układów LTI
Wiemy już, że odpowiedź układu LTI na pobudzenie x[n] można otrzymać licząc
splot tego sygnału z odpowiedzią impulsową układu h[n]. W dziedzinie
z-transformaty związek ten wyraża się prostym iloczynem:
Y z =H z ⋅X z
gdzie Y(z) jest z-transformatą odpowiedzi y[n], H(z) – z-transformatą odpowiedzi
impulsowej h[n], zaś X(z) – z-transformatą pobudzenia x[n].
Jak widać, h[n] charakteryzuje układ w dziedzinie czasu, zaś H(z) –
charakteryzuje ten sam układ w dziedzinie z-transformaty. Funkcję H(z) nazywa
się funkcją przenoszenia (system function, transfer function).
14 (39)

Wyrażenie funkcji przenoszenia w postaci funkcji wymiernej:
H z =
Y z
X z
jest szczególnie wygodne w przypadku układów LTI opisywanych równaniami
różnicowymi o stałych współczynnikach:
y [n]=−
∑
k=1
N
a
k
y [n−k ]
∑
k=0
M
b
k
x [n−k ]
Funkcję przenoszenia H(z) można wówczas wyznaczyć wprost jako
z-transformatę y[n] postaci:
Y z =−
∑
k =1
N
a
k
Y z z
−
k
∑
k=0
M
b
k
X z z
−
k
15 (39)
Po przekształceniach otrzymujemy:
Y z
1
∑
k =1
N
a
k
z
−
k
=
X z
∑
k =0
M
b
k
z
−
k
H z =
Y z
X z
=
∑
k =0
M
b
k
z
−
k
1
∑
k =1
N
a
k
z
−
k
Tak więc układy LTI opisywane równaniami różnicowymi o stałych
współczynnikach posiadają wymierne funkcje przenoszenia.
16 (39)

Powyższa ogólna postać funkcji przenoszenia ma 2 przypadki szczególne:
(1) a
k
= 0 dla wszystkich 1 ≤ k ≤ N:
H z =
∑
k =0
M
b
k
z
−
k
=
z
−
M
∑
k =0
M
b
k
z
M −k
H(z) zawiera M-zer zależnych od b
k
oraz M-krotny biegun w początku układu
(p = 0). Układ taki nazywa się układem zerowym (all-zero system). Odpowiedź
impulsowa takiego układu jest skończona – jest to układ FIR.
(2) b
k
= 0 dla wszystkich 1 ≤ k ≤ M:
H z =
b
0
1
∑
k =1
N
a
k
z
−
k
=
b
0
z
N
∑
k =0
N
a
k
z
N −k
Jest to układ biegunowy (all-pole system), gdzie bieguny uwarunkowane są
wartościami a
k
. Odpowiedź impulsowa jest nieskończona, a więc jest to układ IIR.
17 (39)
Ex.: Wyznaczyć funkcję przenoszenia oraz odpowiedź impulsową układu
opisywanego równaniem różnicowym:
y [n]=
1
2
y [n−1]2 x [n]
z-transformata równania różnicowego ma postać:
Y z=
1
2
z
−
1
Y z 2 X z
Funkcja przenoszenia przyjmuje więc postać:
H z =
2
1−1/2 z
−
1
Układ posiada biegun dla z = 0.5 oraz zero dla z = 0. Korzystając z tabel
z-transformat znajdziemy, że jego odpowiedź impulsowa wynosi:
h[n]=2
1
2
n
u[n]
18 (39)
Obliczanie odwrotnej z-transformaty
Formalna definicja odwrotnej z-transformaty ma postać:
x [n]=
1
2 i
∮
C
X z z
n−1
dz
Jest to całka krzywoliniowa po zamkniętym konturze C, który jest całkowicie
zawarty w ROC funkcji X(z) oraz zawiera początek płaszczyzny zespolonej.
W najprostszym przypadku C może być okręgiem o środku w początku
płaszczyzny zespolonej, zawartym w ROC.
Zasadniczo istnieją 3 metody znajdowania odwrotnej z-transformaty:
–
obliczanie całki krzywoliniowej,
–
rozwinięcie X(z) na szereg potęgowy zmiennej z
k
oraz z
-k
,
–
rozwinięcie na ułamki właściwe i odczytanie rozwiązania z tablicy.
19 (39)

Obliczanie odwrotnej z-transformaty przez rozwinięcie w szereg
potęgowy zmiennej z
Mając daną z-transformatę X(z) wraz z jej obszarem zbieżności, rozwijamy ją
w szereg potęgowy postaci:
X z =
∑
n=−∞
∞
c
n
z
−
n
Powyższy szereg musi być zbieżny w danym ROC.
Jednoznaczność z-transformaty gwarantuje wówczas, że:
∀
n∈ℤ
x [n]=c
n
20 (39)

Ex.: Wyznaczyć odwrotną z-transformatę funkcji:
X z =
1
1−1.5z
−
1
0.5z
−
2
dla (a) ROC: |z| > 1, (b) |z| < 0.5.
(a) Ponieważ ROC leży na zewnątrz koła, x[n] musi być sygnałem przyczynowym.
Poszukiwany szereg potęgowy będzie więc zawierał wyłącznie wyrazy typu z
-k
,
a jego ostateczną postać znajdziemy poprzez długie dzielenie wielomianów:
21 (39)
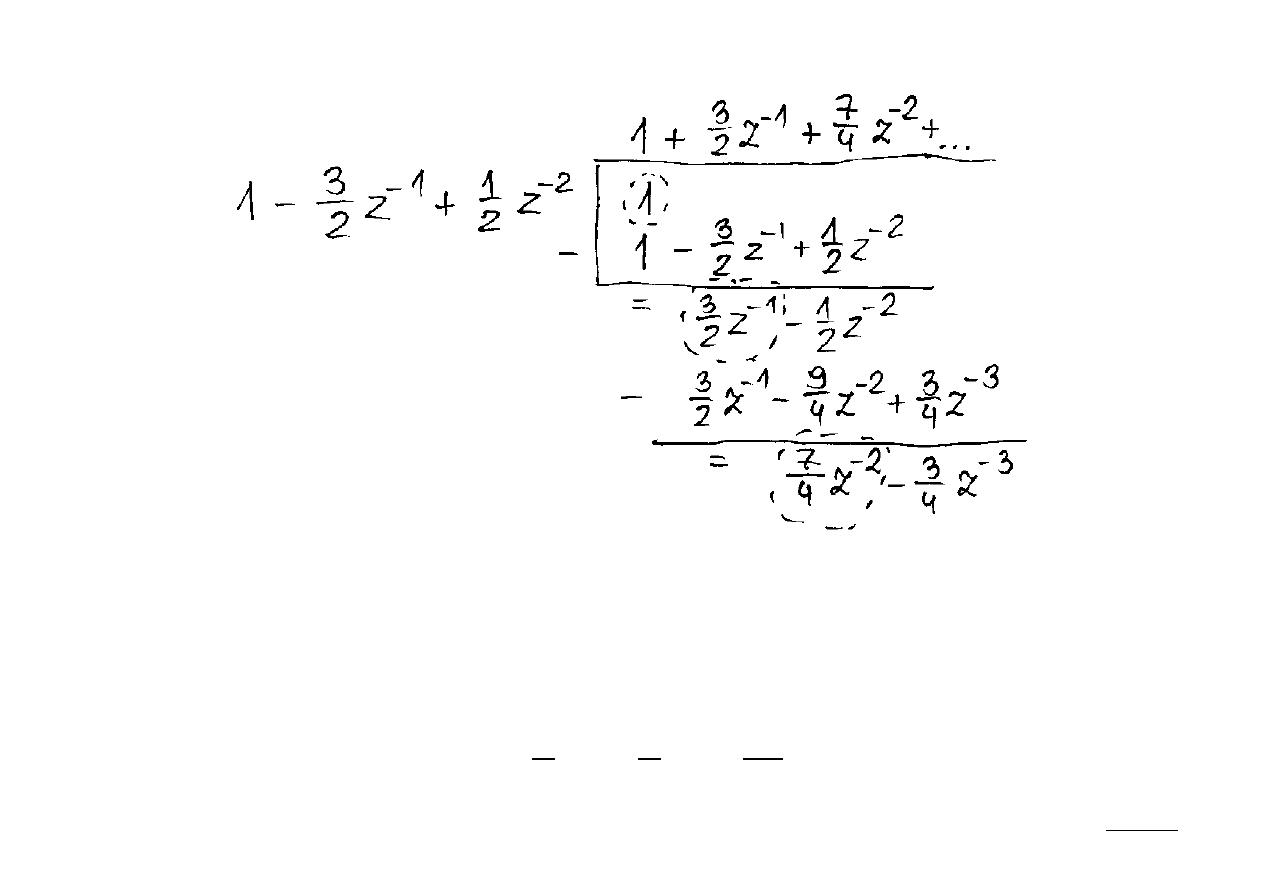
Ostatecznie obliczamy, że:
X z =1
3
2
z
−
1
7
4
z
−
2
15
8
z
−
3
...
22 (39)
Stąd mamy, że:
x [n]=[1 ,
3
2
,
7
4
,
15
8
,...]
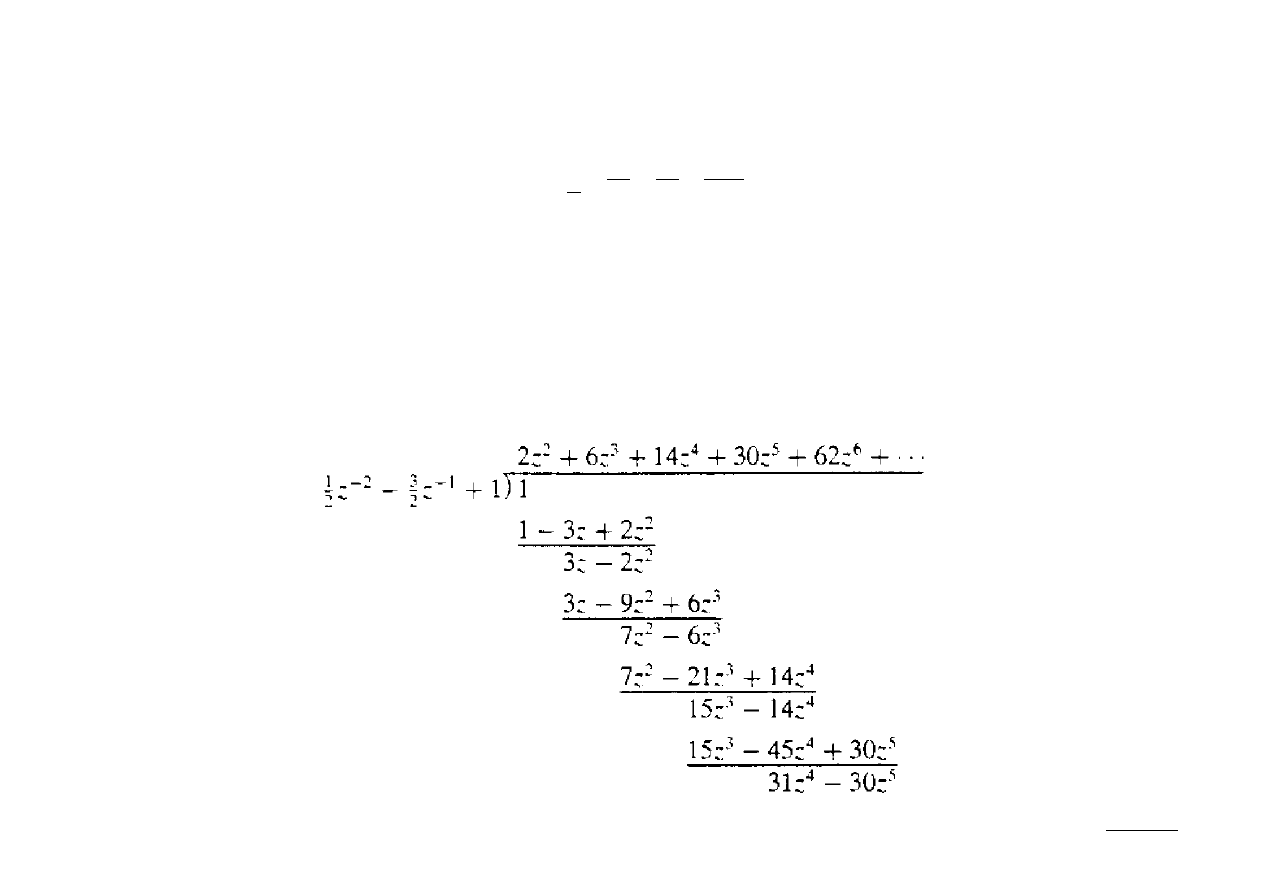
(b) W tym przypadku ROC znajduje się we wnętrzu koła, tak więc x[n] musi być
antyprzyczynowy, zaś współczynniki rozwinięcia muszą być potęgami dodatnimi.
Dzielenie wygląda tu następująco:
23 (39)

Skąd otrzymujemy, że:
X z =2 z
2
6 z
3
14 z
4
30 z
5
62 z
6
...
Ostateczny wynik ma więc postać:
x [n]=[... 62,30, 14,6, 2, 0,0]
Z powyższych przykładów wypływa wniosek, iż metoda długiego dzielenia staje
się uciążliwa w przypadku długich ciągów, gdyż prowadzi ona do uzyskania
konkretnych wartości kolejnych próbek odwrotnej z-transformaty, a nie do
wyznaczenia jej postaci analitycznej.
24 (39)
Odwracanie z-transformaty przez upraszczanie funkcji
wymiernych
Metoda tablicowa jest skuteczna, gdy szukaną odwrotną z-transformatę uda się
zapisać w postaci kombinacji liniowej z-transformat stablicowanych. Jest to
narzędzie szczególnie wydajne w przypadku X(z) będących funkcjami wymiernymi
postaci:
X z =
N z
D z
=
b
0
b
1
z
−
1
...b
M
z
−
M
1a
1
z
−
1
...a
N
z
−
N
;a
0
=
1
Powyższa funkcja wymierna jest funkcją właściwą, gdy a
0
≠ 0 oraz M < N, a więc
gdy liczba ograniczonych (w sensie amplitudy) zer jest mniejsza niż liczba
ograniczonych biegunów.
Każdą funkcję niewłaściwą (M ≥ N) zawsze można przedstawić jako sumę
wielomianu i funkcji wymiernej właściwej.
25 (39)
Rozdzielone bieguny
Zakładając, że wszystkie bieguny funkcji X(z) p
1
, p
2
, .., p
N
są rozdzielone,
szukamy rozwinięcia funkcji wymiernej w postaci:
X z
z
=
A
1
z− p
1
A
2
z− p
2
...
A
N
z− p
N
Kolejnym zadaniem jest wyznaczenie wartości współczynników A
1
, ..., A
N
.
Ex.: Rozłożyć powyższą metodą funkcję wymierną X(z) = (1-1.5z
-1
+0.5z
-2
)
-1
.
26 (39)
Analiza układów LTI w domenie z-transformaty
Odpowiedź układu LTI o wymiernej funkcji przenoszenia:
Rozważmy układ zerowo-biegunowy opisywany równaniem różnicowym postaci:
y [n]=−
∑
k=1
N
a
k
y [n−k ]
∑
k=0
M
b
k
x [n−k ]
którego funkcja przenoszenia opisywana jest wzorem:
H z =
Y z
X z
=
∑
k =0
M
b
k
z
−
k
1
∑
k =1
N
a
k
z
−
k
=
B z
A z
Załóżmy dodatkowo, że z-transformata pobudzenia x[n] również ma postać
wymierną:
X(z) = N(z)/Q(z)
27 (39)

Jeśli układ jest zrelaksowany, tzn.: y[-1] = y[-2] = ... = y[-N] = 0, wówczas
z-transformata odpowiedzi układu ma postać:
Y z =H z ⋅X z =
B z ⋅N z
A z ⋅Q z
Załóżmy teraz, że układ posiada rozdzielone bieguny p
1
, p
2
, ..., p
N
, zaś bieguny
z-transformaty pobudzenia to q
1
, q
2
, ..., q
L
, przy czym żadne dwa bieguny nie
pokrywają się ani ze sobą, ani z zerami wielomianów B(z) i N(z). Y(z) można
wówczas przedstawić w postaci:
Y z=
∑
k =1
N
A
k
1− p
k
z
−
1
∑
k=1
L
Q
k
1−q
k
z
−
1
28 (39)

Odwrotna z-transformata odpowiedzi układu ma wówczas postać:
y [n]=
∑
k =1
N
A
k
p
k
n
u[n]
∑
k =1
L
Q
k
q
k
n
u[n]
Widać, że całkowita odpowiedź układu zawiera dwa składniki:
(1) pierwszy jest funkcją położenia biegunów układu {p
k
} i określany jest mianem
odpowiedzi naturalnej układu (natural response). Wpływ pobudzenia na
odpowiedź swobodną wyraża się jedynie w przeskalowaniu wartości
współczynników {A
k
}.
(2) drugi jest funkcją biegunów pobudzenia {q
k
} i określany jest mianem
odpowiedzi wymuszonej układu (forced response). Wpływ układu na
odpowiedź wymuszoną przejawia się w możliwym przeskalowaniu
współczynników {Q
k
}.
Uwaga! Odpowiedź naturalna i zerowa (ZIR) są różne!
29 (39)

Odpowiedź układu zero-biegunowego o niezerowych
warunkach początkowych
Załóżmy, że pobudzenie x[n] dostarczono do układu zerowo-biegunowego
w chwili n = 0, a więc jest to pobudzenie przyczynowe. Historia układu
(wpływ wcześniejszych sygnałów wejściowych) zawarta jest w warunkach
początkowych y[-1], y[-2], ..., y[-N]. Równanie różnicowe opisujące dany układ
włączając w to warunki początkowe ma postać:
∑
k=0
N
a
k
y [n−k ]
∑
j=1
k
y [− j]
=
∑
k =0
M
b
k
x [n−k ]
Skąd mamy, że w dziedzinie z-transformaty:
∑
k=0
N
a
k
z
−
k
Y z
∑
j=1
k
y [− j ] z
j
=
∑
k =0
M
b
k
z
−
k
X z
30 (39)
Po przekształceniach dostajemy, że:
Y z =−
∑
k =1
N
a
k
z
−
k
Y z
∑
j=1
k
y [− j ] z
j
∑
k =0
M
b
k
z
−
k
X z
gdzie domyślnie założono, że a
0
= 1.
Powyższą z-transformatę odpowiedzi można przedstawić w postaci:
Y z =
∑
k =0
M
b
k
z
−
k
1
∑
k =1
N
a
k
z
−
k
X z −
∑
k=1
N
a
k
z
−
k
∑
j=1
k
y [− j ] z
j
1
∑
k =1
N
a
k
z
−
k
Skąd mamy, że:
Y z =H z X z
N
z
A z
31 (39)

Przy czym wzorze tym występuje wyrażenie:
N
0
z =−
∑
k =1
N
a
k
z
−
k
∑
j=1
k
y [− j ] z
j
Otrzymana z-transformata odpowiedzi całkowitej układu z niezerowymi
warunkami początkowymi składa się z 2 części:
(1) odpowiedź wymuszona, która w dziedzinie z-transformaty ma postać:
Y
zs
(z) = H(z)X(z),
(2) odpowiedź swobodna wynikająca z niezerowych warunków początkowych przy
braku pobudzenia: Y
zi
(z) = N
0
(z)/A(z).
32 (39)

Powyższe wyrażenie ma swój odpowiednik w dziedzinie czasu:
y[n] = y
zs
[n] + y
zi
[n]
Bieguny odpowiedzi swobodnej i naturalnej są identyczne, a więc niezerowe
warunki początkowe wpływają na wartości {A
k
}, ale nie mają za to wpływu na
odpowiedź wymuszoną układu:
y
zi
[
n]=
∑
k =1
N
D
k
p
k
n
u[n]
y [n]=
∑
k =1
N
A
k
D
k
p
k
n
u[n]
∑
k =1
L
Q
k
q
k
n
u[n]
33 (39)
Ex.: Wyznaczyć odpowiedź skokową (wymuszoną) układu:
y [n]=0.9 y [n−1]−0.81 y [n−2]x [n]
dla warunku początkowego: y[-1] = y[-2] = 1.
Funkcja przenoszenia ma postać:
H z =
1
1−0.9 z
−
1
0.81z
−
2
W układzie występują dwa bieguny sprzężone:
p
1
=
0.9 e
i
3
, p
2
=
0.9 e
−
i
3
z-transformata skoku jednostkowego ma postać:
X z =
1
1− z
−
1
34 (39)
Stąd odpowiedź wymuszona ma postać:
Y
zs
z =
1
1−0.9 e
i
3
z
−
1
1−0.9 e
−
i
3
z
−
1
1−z
−
1
=
...
...=
0.542−i 0.049
1−0.9 e
i
3
z
−
1
0.542i 0.049
1−0.9 e
−
i
3
z
−
1
1.099
1−z
−
1
Stąd ogólna postać odpowiedzi wymuszonej (dla zerowych warunków
początkowych) to:
y
zs
[
n]=[1.0991.0880.9
n
cos
3
n−5.2
0
]
u[n]
35 (39)
Dla zadanych niezerowych warunków początkowych dodatkowym wyrażeniem
w odpowiedzi wymuszonej jest:
Y
zi
z=
N
0
z
A
z=
0.09−0.81 z
−
1
1−0.9 z
−
1
0.81 z
−
2
Stąd odpowiedź swobodna wynosi:
y
zi
[
n]=0.9880.9
n
cos
3
n87
0
u[n]
Całkowita odpowiedź układu dla zadanych warunków początkowych ma zatem
postać:
y [n]=1.099 u[n]1.440.9
n
cos
3
n38
0
u[n]
36 (39)

Odpowiedź przejściowa i stacjonarna
Naturalna odpowiedź układu LTI ma postać:
y
nat
[
n]=
∑
k =1
N
A
k
p
k
n
u[n]
Jeśli wszystkie bieguny tej odpowiedzi |{p
k
}| < 1, wówczas amplituda tej
odpowiedzi będzie z czasem zbiegać do zera. Taką odpowiedź naturalną
nazywamy odpowiedzią niestacjonarną (przejściową – transient response).
Odpowiedź wymuszona dana jest z kolei w postaci:
y
for
[
n]=
∑
k =1
L
Q
k
q
k
n
u [n]
Jeśli wszystkie bieguny |{q
k
}| < 1, wymuszenie jest niestacjonarne i zbiega do
zera, jednak jeśli |{q
k
}| = 1, to bieguny leżą na kole jednostkowym i wymuszenie
jest sinusoidalne, a y
for
[n] jest odpowiedzią stacjonarną (steady-state response).
37 (39)

Przyczynowość i stabilność układów LTI
w domenie z-transformaty
Układ LTI nazywamy przyczynowym, gdy:
∀
n0
h[n]=0
Z drugiej strony, jeśli układ jest przyczynowy, to jego ROC leży poza kołem
o promieniu r. Z tego względu układ LTI jest przyczynowy wtedy i tylko wtedy, gdy
ROC jego funkcji przenoszenia leży poza kołem o promieniu r < ∞.
Układ LTI jest stabilny wtedy i tylko wtedy gdy:
∑
n=−∞
∞
∣
h[n]∣∞
W dziedzinie z-transformaty warunek ten określa wymaganie, aby ROC funkcji
przenoszenia zawierało koło jednostkowe.
38 (39)

Znoszenie się biegunów i zer
Kiedy z-transformata posiada identyczne zera i bieguny, ulegają one skróceniu,
a więc nie pojawiają się w końcowym wyrażeniu na odwrotną z-transformatę.
Efekt ten może wystąpić zarówno dla funkcji przenoszenia H(z), jak i po jej
wymnożeniu z z-transformatą pobudzenia. W pierwszym przypadku mówimy
o redukcji rzędu funkcji przenoszenia, w drugim – wzajemnym wygaszaniu
biegunów (zer) funkcji przenoszenia przez zera (bieguny) pobudzenia.
39 (39)
Wyszukiwarka
Podobne podstrony:
DSP Wyk%b3ad 04 UWM
DSP Wyk%b3ad 02 UWM
DSP Wyk%b3ad 07 UWM
DSP Wyk%b3ad 11 UWM
DSP Wyk%b3ad 10 UWM
DSP Wyk%b3ad 05 UWM
DSP Wyk%b3ad 09 UWM
DSP Wyk%B3ad 01 UWM
DSP Wyk%b3ad 03 UWM
DSP Wyk%b3ad 13 UWM
DSP Wyk%b3ad 06 UWM
DSP Wyk%b3ad 04 UWM
więcej podobnych podstron