ROBOTY PRZEMYSŁOWE
LABORATORIUM
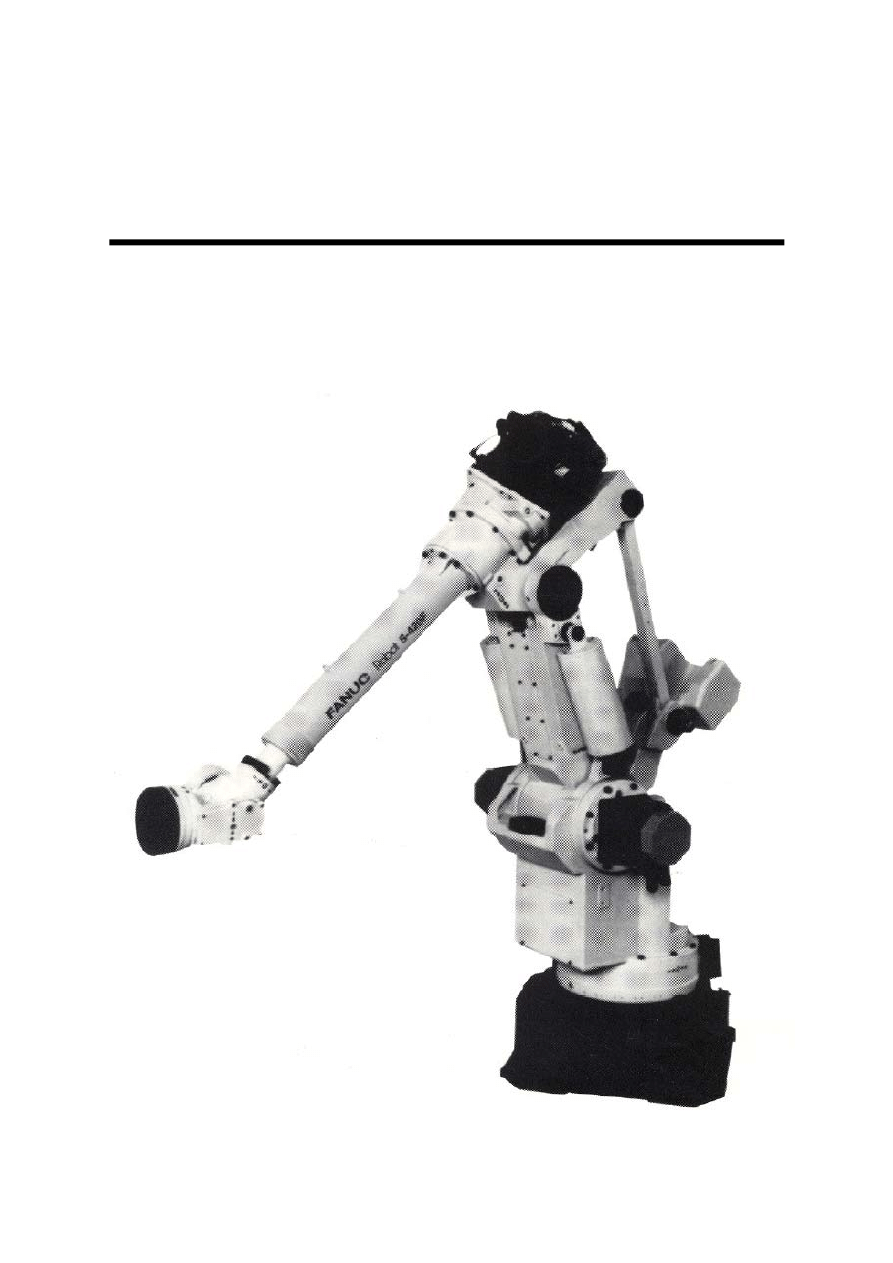
FANUC S-420F

Robot FANUC S-420F
Wstęp
Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy
zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Kluczowe znaczenie ma tu precyzja wykonywania zadań, wynikająca z dużej powtarzalności
ruchów robota - dla modeli przeznaczonych do spawania parametr ten wynosi 0,04 ÷ 0,1 mm.
Ponadto procesy spawania wiążą się zwykle ze szkodliwymi warunkami pracy dla
człowieka).
Zgrzewanie ( gdy wymagana jest zwykle olbrzymia precyzja wykonywania zadań, którą -
dzięki dużej powtarzalności ruchów (rzędu 0.1 mm) - mogą zapewnić tylko roboty).
Obróbka metali, malowanie/obróbka wykańczająca, mechaniczny montaż, cięcie laserowe
oraz przy użyciu strumienia wody, paletyzowanie, pakowanie, przenoszenie materiałów,
załadunek i rozładunek oraz usuwanie materiału. Roboty doskonale nadają się do rozmaitych
maszyn ze względu na bardzo dużą zdolność adaptacji do zmiennych warunków,
spowodowanych poruszaniem się maszyny oraz zmiennością (rozmiarów, kształtów)
montowanych elementów. Duże znaczenie ma także powtarzalność wykonywanych operacji,
a także dodatkowe funkcje, takie jak np. sprawdzanie wolnej przestrzeni.
Wykorzystywane są one w bardzo wielu branżach przemysłu, m.in. w przemyśle
samochodowym, elektronicznym, spożywczym, maszynowym, farmaceutycznym,
metalowym, papierniczym, w produkcji urządzeń medycznych, wyrobów z tworzyw
sztucznych, hutach szkła. Przykładem takiego wielozadaniowego robota jest model S-420F.
Robot FANUC S-420F
Budowa robota
Dane techniczne
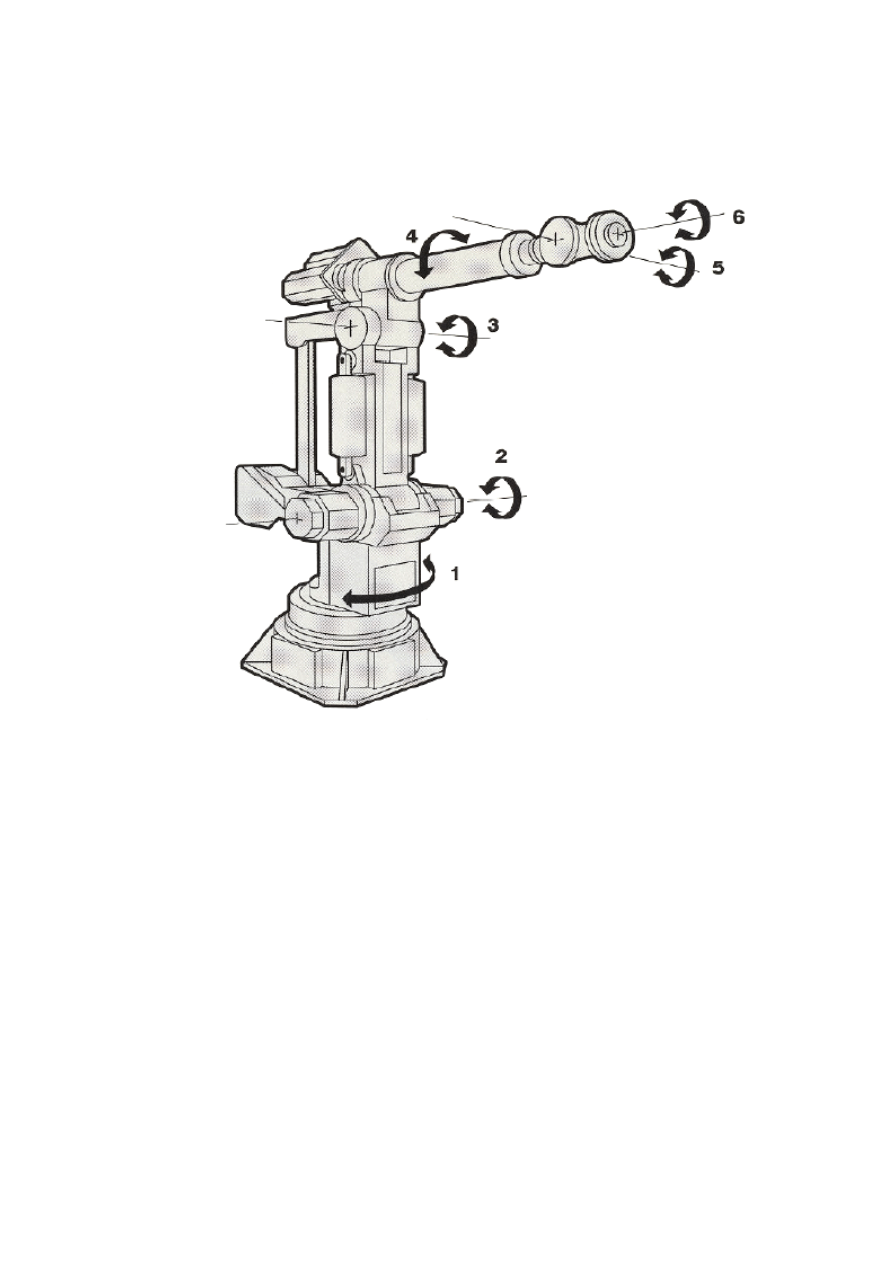
1) robot ma sześć stopni swobody czyli posiada sześć osi obrotu
2) ruch każdego członu zależny jest od serwonapędu czyli układu nadążnego
3) powtarzalność ruchów (dokładność pozycjonowania) zamyka się w granicach
+0.5 mm co pozwala na wykonywanie dość precyzyjnych manewrów
4) udźwig to około 264,55 funtów (120 kg) występuje jednak możliwość lekkiego
przeładowania ( uwarunkowane względami bezpieczeństwa )
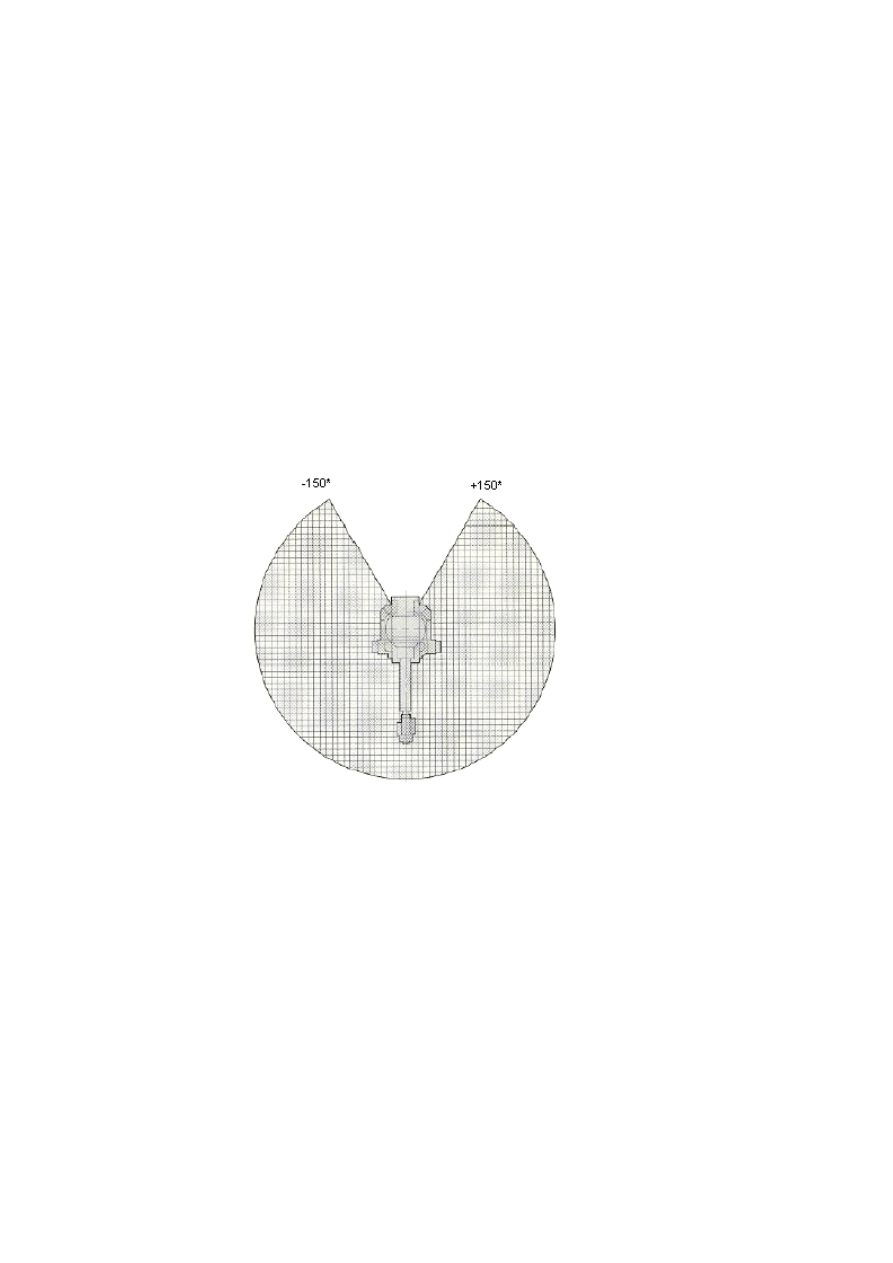
5) możliwość obrotu wokół własnej osi o 300°
Rys 1 : Zakres działania uwarunkowany przez serwomechanizm pierwszy.
6) ciężka żelazna podstawa
7) ramiona zabezpieczone powłoką anty-ścieralną
8) masa to około 1600 kg
9) uszczelnienia na wszystkich elementach obrotowych
10) wyłączniki bezpieczeństwa
11) bardzo precyzyjne przekładnie w piątej i szóstej osi
12) zasięg ramienia wynosi 2413mm (95″)
13) zasięg w linii pionu wynosi 2731mm (107.5″)
14) robot ma smukły profil i wykazuje szerokie pole działania
15) posiada szafę sterowniczą
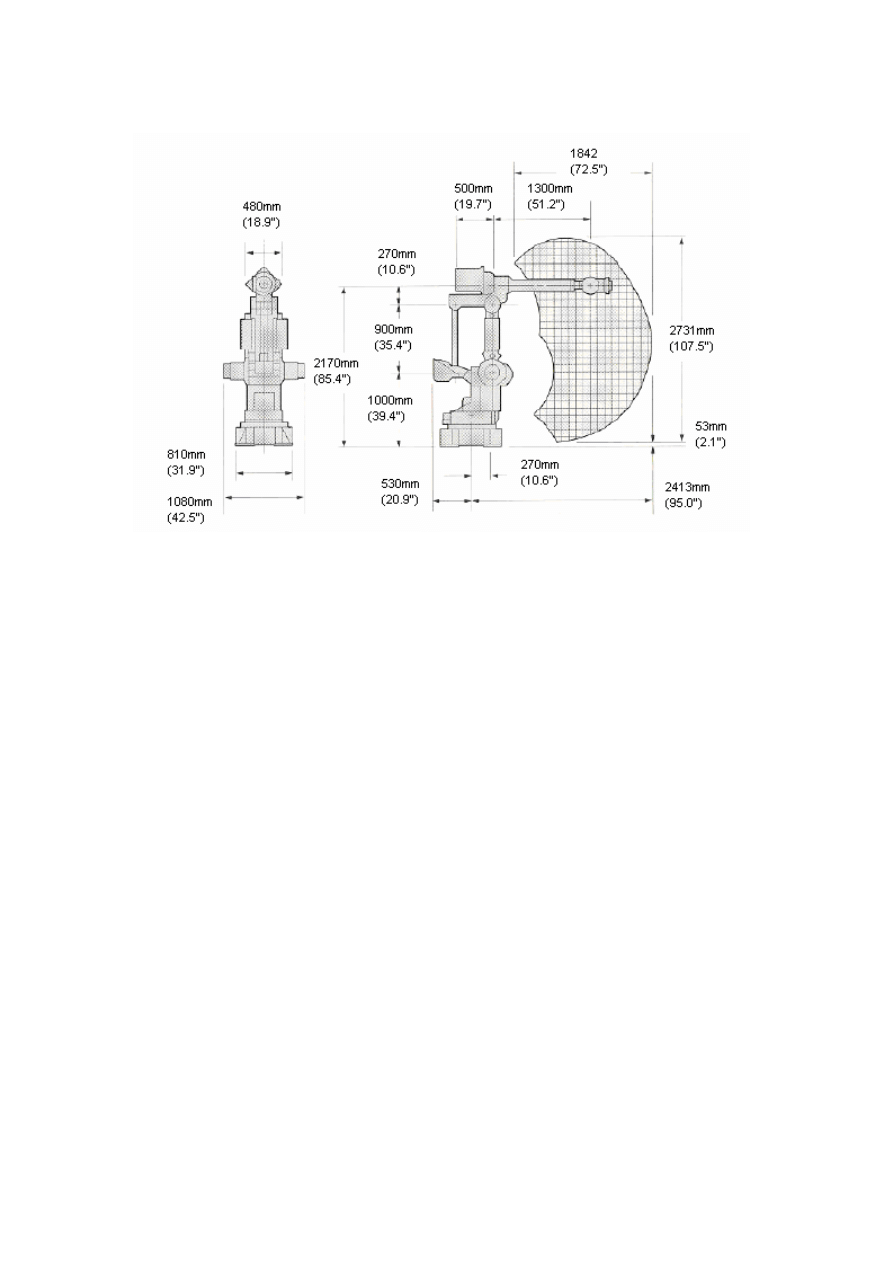
Robot FANUC S-420F
Rys 2 : Wymiary robota Fanuc S-420F
Serwonapędy
Oś pierwsza, druga i trzecia napędzane są przez układy nadążne prądu stałego
poprzez reduktory RV. Serwomechanizmy są bezpośrednio połączone z reduktorami a moc
na osiach jest uzyskiwana bezpośrednio z wyjścia reduktora RV. Takie bezpośrednie
połączenie pozwala na uzyskanie dużej sztywności i gładki przebieg ruchu. Pozostałe osie
przegubów czyli os czwarta, piąta i szósta napędzane są przez serwomechanizmy AC
połączone z reduktorem RV. Umieszczone są one w tym przypadku na końcu trzeciej osi
przegubu. Napędy połączone są z pozostałymi przegubami wysokie klasy sprzęgłami.
Końcówka przegubu na osi czwartej jest połączona bezpośrednio z wyjściem reduktora RV
natomiast osie przegubów numer pięć i sześć z wejściem reduktora RV poprzez drugi zespół
przekładni. Wszystkie osie używają elektro-mechanicznych układów hamulcowych.
Serwomechanizmy zapewniają :
9 Szybkie przyspieszenie i spowolnienie.
9 Precyzyjne pozycjonowanie.
9 Silniki są bezszczotkowe co zapewnia ich dłuższą prace bez potrzeby serwisowania.
Robot FANUC S-420F
Ruch w osiach:
oś 1 300°
oś 2 115°
oś 3 145°
oś 4 720°
oś 5 250°
oś 6 720°
Max prędkość fabryczna
os 1 2,09rad/s; -95°/s
os 2 2,09rad/s; -95°/s
os 3 2,09rad/s; -95°/s
os 4 6,28rad/s; -100°/s
os 5 6,28rad/s; -100°/s
os 6 7,85rad/s; -160°/s
Momenty:
oś 4 1372,93 Nm
oś 5 1372,93 Nm
oś 6 686,47 Nm
Momenty bezwładności:
oś 4 117,68 kg•m²
oś 5 117,68 kg•m²
oś 6 58,84 kg•m²
Rys 3 : Położenie osi układu Robota S-420F
Opis osi obrotu robota S-420F :
Oś 1 odpowiada za obrót wyznaczający pole działania robota.
Oś 2 odpowiada za tzw. zginanie talii robota.
Oś 3 odpowiada za zginanie barku.
Oś 4 odpowiada za obrót ramienia.
Oś 5 odpowiada za pozycjonowanie przegubu na którym znajduje się końcówka robocza.
Oś 6 zaś za obrót ostatniego przegubu.
Robot FANUC S-420F
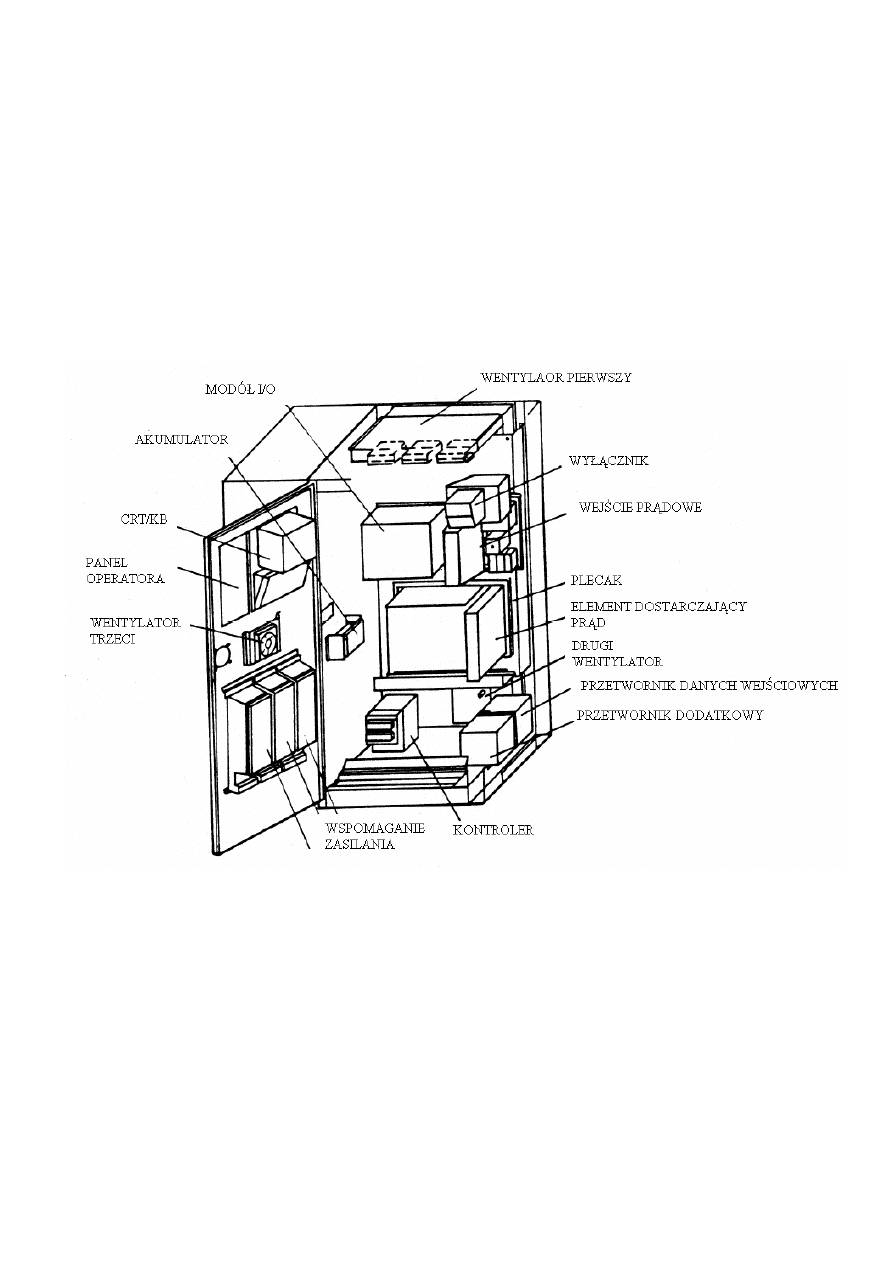
System sterowania
System sterowania zapewnia układ R-H kontroler. Jest on sercem systemu -
elementem zarządzającym całością, przy pomocy którego następuje wymiana informacji
pomiędzy programatorem a zespołem wykonawczym oraz wszelkimi innymi urządzeniami.
Rys 4 : Szafa sterownicza.
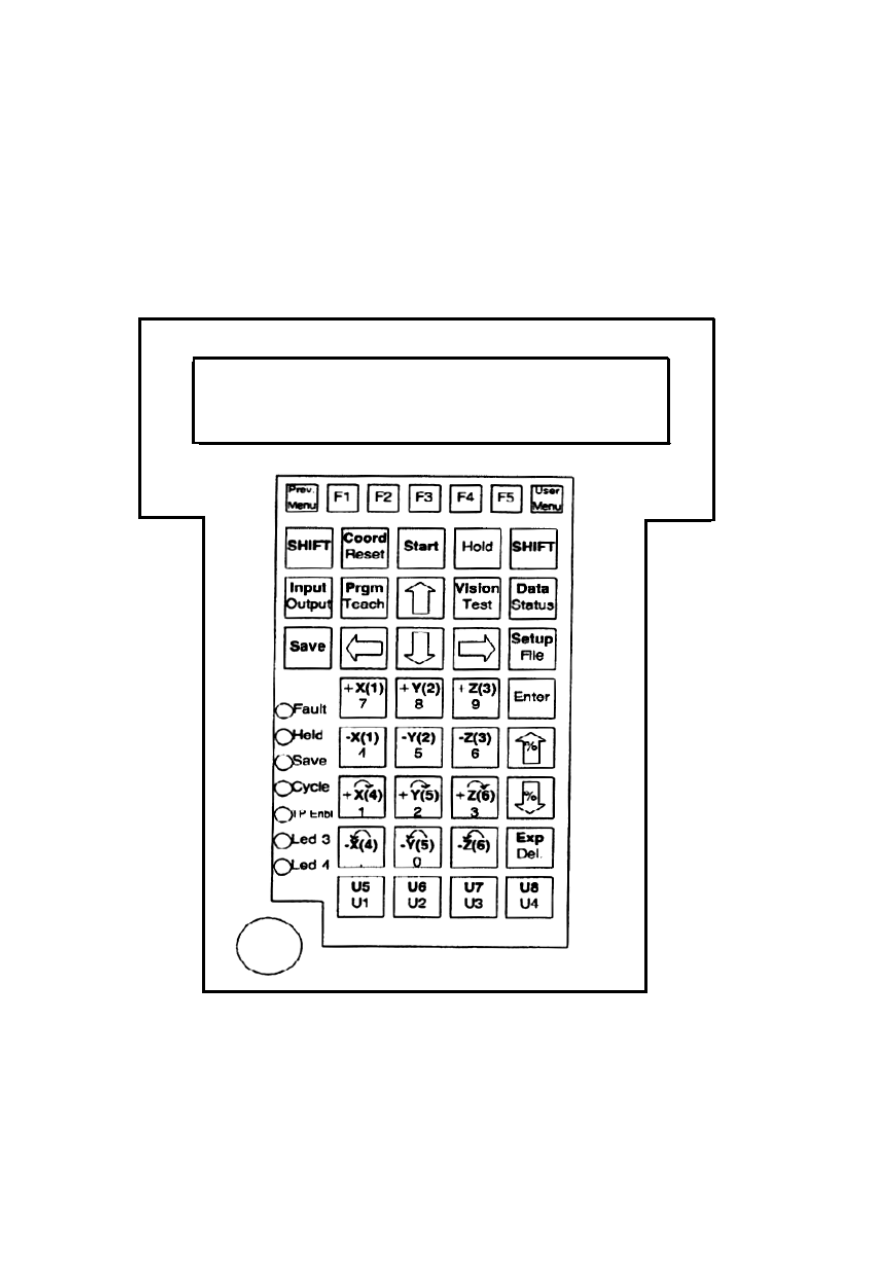
Na zajęciach tych zapoznamy się z jednym ze sposobów „uczenia” robota wykonywania
poszczególnych zadań używając do tego celu panelu sterowniczego Teach Pendant. Jest to
tzw. uczenie poprzez teleoperator. Odbywa się to poprzez odpowiednią kombinację ruchów
robota którymi steruje człowiek a które maszyna jest w stanie potem sama wielokrotnie i przy
zadanych parametrach działania wykonać. Teach Pendant jest wyposażony w klawiaturę oraz
wyświetlacz LCD (liquid crystal display). Z kontrolerem połączony jest za pomocą kabla
połączonego z płytą RAM’u znajdującą się wewnątrz kontrolera RH.
Robot FANUC S-420F
Wykorzystanie panelu Teach Pendant pozwala na :
9 Poruszanie poszczególnymi częściami robota
9 Odpowiednie pozycjonowanie układu
9 Przetestowanie gotowej sekwencji
9 Eliminacje błędów powstałych w czasie uczenia
9 Można uzyskane wyniki zapisać w plikach
Rys 5 : Wygląd panelu Teach Pendant.

Robot FANUC S-420F
Literatura :
1. Karty technologiczne firmy GE FANUC Robotics.
Document Outline
Wyszukiwarka
Podobne podstrony:
Lab 03 C introduction
Lab 03
Lab 03 Analiza obwodu elektrycz Nieznany
385 SPC Lab 03 LQR id 36426
CMS Lab 03 JoomlaPack
Systemy Lab 03
487 SKiTI LAB 03
Lab 03 Strumienie
lab 03
LAB 7 03
MP Lab 03 Przelewy, 3
lab 03
Lab 03 2011 2012
LAB 03 id 258787 Nieznany
tei lab 03 dokument techniczny
Lab 03 Strumienie
lab 03
fiz lab 03
więcej podobnych podstron