S t r o n a
| 1
Copyright © 2008
all rights reserved WODZU!
Opracowanie zagadnień egzaminacyjnych z fizyki,
Budownictwo I rok, 2007/2008, studia dzienne.
MECHANIKA
1. Wektor wodzący, prędkość, przyspieszenie.
Wektor wodzący - dla danego punktu A to wektor zaczepiony w początku układu
współrzędnych i o końcu w punkcie A, czyli np. w układzie kartezjańskim:
Długość wektora wodzącego jest odległością punktu od początku układu współrzędnych.
Prędkość to:
wektorowa wielkość fizyczna wyrażająca zmianę wektora położenia w jednostce
czasu.
skalarna wielkość oznaczająca przebytą drogę w jednostce czasu lub tylko wartość
prędkości zwana przez niektórych szybkością.
Jednostka prędkości w układzie SI to metr na sekundę.
Prędkość wektorowa średnia określa szybkość zmiany wektora położenia w dłuższym czasie
definiuje się jako:
Przyspieszenie - wektorowa wielkość fizyczna wyrażająca zmianę prędkości w czasie.
Przyspieszenie definiuje się jako pochodną prędkości po czasie (jest to miara zmienności
prędkości). Przyspieszenie jest wielkością wektorową, gdzie wartość tego wektora jest równa
wartości pochodnej prędkości względem czasu w danej chwili. Jeśli przyspieszenie jest
skierowane przeciwnie do kierunku prędkości ruchu, to jest czasem nazywane opóźnieniem.
Jednostka przyspieszenia w układzie SI to metr na sekundę do kwadratu.
S t r o n a
| 2
Copyright © 2008
all rights reserved WODZU!
2. Ruch jednostajny, ruch jednostajnie przyspieszony.
Ruch jednostajny – ruch, w którym w takich samych przedziałach czasowych ciało pokonuje
takie same odcinki drogi.
Warunek ten odpowiada, że prędkość (jako wielkość skalarna) jest stała. Dlatego wzór ten
zachodzi też dla dowolnie długich odcinków czasowych:
Ze względu na tor, ruch jednostajny dzieli się na:
Ruch jednostajny prostoliniowy,
Ruch jednostajny krzywoliniowy
o
Ruch jednostajnie przyspieszony - jest to ruch, w którym prędkość ciała zwiększa się o
jednakową wartość w stałych odstępach czasu. Ciało takie ma przyspieszenie o stałej
wartości, a jego kierunek i zwrot są równe kierunkowi i zwrotowi prędkości tego ciała.
Droga (wartość przesunięcia) w tym ruchu:
Gdzie:
s - droga, pokonana przez ciało
s
0
- droga początkowa ciała
v - wartość prędkości ciała
V
0
- wartość prędkości początkowej ciała
t - czas trwania ruchu
a - wartość przyspieszenia
3. Zasady dynamiki Newtona.
I zasada dynamiki (zasada bezwładności):
Jeśli na ciało nie działa żadna siła lub siły działające równoważą się, to ciało pozostaje w
spoczynku lub porusza się ruchem jednostajnym prostoliniowym.
S t r o n a
| 3
Copyright © 2008
all rights reserved WODZU!
II zasada dynamiki:
Jeśli siły działające na ciało nie równoważą się (czyli siła wypadkowa
jest różna od zera),
to ciało porusza się z przyspieszeniem wprost proporcjonalnym do siły wypadkowej
Współczynnik proporcjonalności jest równy odwrotności masy ciała.
III zasada dynamiki (zasada akcji i reakcji):
Oddziaływania ciał są zawsze wzajemne. Siły wzajemnego oddziaływania dwóch ciał mają
takie same wartości, taki sam kierunek, przeciwne zwroty i różne punkty przyłożenia (każda
działa na inne ciało).
4. Inercjalne i nieinercjalne układy odniesienia.
Układ inercjalny to taki układ odniesienia, który porusza się ze stałą prędkością po linii
prostej. Innymi słowy, jego wektor prędkości nie zmienia się. Stałe pozostają jego kierunek,
zwrot i wartość.
W każdym układzie inercjalnym prawa fizyki są takie same i zjawiska fizyczne przebiegają w
identyczny sposób. Jest to treść fundamentalnej zasady względności. Czyli nie zależą one od
konkretnej wartości stałej prędkości układu inercjalnego w taki sposób, by obserwując je
można było jednoznacznie wyznaczyć z jaką prędkością się poruszamy
Układ nieinercjalny to układ odniesienia, którego wektor prędkości zmienia się, czyli taki,
który ma niezerowe przyspieszenie. Wektor prędkości może zmieniać tylko swoją wartość
(ruch przyspieszony po linii prostej), tylko kierunek (ruch po okręgu) lub w najogólniejszym
przypadku kierunek i wartość (jak na przykład przy parkowaniu samochodu kiedy to skręca
się i hamuje).
Charakterystyczną cechą układów nieinercjalnych jest występowanie w nich sił pozornych.
Siła pozorna jest skierowana zawsze przeciwnie do kierunku przyspieszenia (a) układu
nieinercjalnego i ma wartość (–ma), gdzie m to masa ciała, na które działa siła pozorna.
5. Siły bezwładności, siła Coriolisa.
Siły bezwładności, pozorne siły działające na ciała fizyczne w nieinercjalnych układach
odniesienia (styczna siła bezwładności, siła odśrodkowa, siła Coriolisa). Liczbowo siły
bezwładności równe są iloczynowi masy i odpowiedniego przyspieszenia, a skierowane
przeciwnie niż siła wymuszająca ruch.
Efekt Coriolisa - efekt występujący w obracających się układach odniesienia. Objawia się
zakrzywieniem toru ciał poruszających się w takim układzie. Zakrzywienie to zdaje się być
wywołane jakąś siłą (dlatego efekt Coriolisa nazywany jest najczęściej siłą Coriolisa), w
rzeczywistości jest jednak spowodowany ruchem układu odniesienia. Wartość tej pozornej
siły wynosi:
S t r o n a
| 4
Copyright © 2008
all rights reserved WODZU!
lub przyspieszenia
Oznaczenia:
m – masa ciała,
v – jego prędkość,
ω – prędkość kątowa układu,
Siła Coriolisa powoduje odchylenie toru ruchu ciała w kierunku przeciwnym do kierunku obrotu
układu odniesienia (np.
6. Praca, siły zachowawcze.
Praca - skalarna wielkość fizyczna, miara ilości energii przekazywanej między układami
fizycznymi w procesach mechanicznych, elektrycznych, termodynamicznych i innych
oznacza formę zmian energii, nie zaś jedną z form energii.
Jeżeli ruch ciała jest prostoliniowy, a wektor siły jest stały, to pracę tej siły określa wzór:
W ogólnym przypadku gdy wektor siły nie jest stały lub przemieszczenie nie jest
prostoliniowe to praca jest sumą prac wykonanych na niewielkich odcinkach, na których
uznaje się że spełnione są powyższe warunki, co wyrażone w postaci całki przedstawia się
następująco:
Całkowanie odbywa się po drodze (L) jaką przebywa punkt zaczepienia siły.
Gdzie:
W - praca,
- siła,
- przesunięcie
Jednostką pracy w układzie SI jest dżul (J) określany jako niuton
· metr:
Siły zachowawcze - są to takie siły, dla których praca po dowolnej drodze między
(dowolnymi) punktami A i B nie zależy od drogi (krzywej toru po którym porusza
S t r o n a
| 5
Copyright © 2008
all rights reserved WODZU!
się ciało) i wyraża się przez zmianę energii potencjalnej ciała w trakcie ruchu od A do
B: Ep(A)
‐Ep(B):
7. Energia kinetyczna, energia potencjalna.
Energia kinetyczna to energia ciała, związana z jego ruchem. Dla ciała o masie m i prędkości
v<c, gdzie c jest prędkością światła w próżni, energia kinetyczna wynosi:
Energia ruchu obrotowego ciała wynosi, w przybliżeniu małych prędkości oraz modelu bryły
sztywnej:
,
gdzie
jest prędkością kątową (pseudowektor), natomiast
jest tensorem
momentu bezwładności.
W przypadku obrotu wokół jednej z osi głównych wyrażenie na energię kinetyczną w ruchu
obrotowym upraszcza się do:
.
gdzie I jest odpowiednim momentem bezwładności, a ω prędkością kątową.
Energia potencjalna jest to energia jaką posiada element umieszczony w polu potencjalnym.
Energię potencjalną zawsze definiuje się względem jakiegoś poziomu zerowego. Podobnie
jak pracę, energię potencjalną mierzy się w dżulach [J]. Energia potencjalna ciała zależy od
jego położenia względem drugiego ciała, z którym oddziałuje. Gdy położenie to ulega
zmianie, zmienia się również energia potencjalna ciała. W przypadku energii potencjalnej
grawitacji, mówiąc o zmianie położenia mamy na myśli zmianę jego wysokości nad Ziemią.
Przyrost energii potencjalnej grawitacji ciała jest równy pracy siły zewnętrznej, wykonanej
przy jego podnoszeniu na wysokość h ruchem jednostajnym. Siła zewnętrzna równoważy
wówczas siłę grawitacji. Energię potencjalną grawitacji ciała o masie m umieszczonego na
wysokości h nad tak zwanym poziomem zerowym obliczamy za pomocą iloczynu m masy, g
grawitacji i h wysokości.
S t r o n a
| 6
Copyright © 2008
all rights reserved WODZU!
Źródłem pola grawitacyjnego jest obiekt posiadający masę. Jeżeli oddalamy się od niego siła
przyciągania słabnie. Oznacza to, że jej wartość zmienia się w funkcji odległości. Przyjęto, że
poziom odniesienia dla energii potencjalnej pola grawitacyjnego to nieskończoność. W
efekcie wyrażenie na pracę potrzebną do wyniesienia obiektu do nieskończoności przyjmie
następujący kształt:
gdzie:
r – odległość od źródła pola grawitacyjnego do przyciąganego obiektu [m],
G – stała grawitacyjna [N×m
2
×kg
-2
],
M – masa źródła pola grawitacyjnego [kg],
m – masa przyciąganego obiektu [kg].
Minus przed całką oznacza, że energia potencjalna jest zawsze ujemna, bo wartość zerową
przyjmuje w nieskończoności.
8. Zasada zachowania energii.
W polu sił zachowawczych całkowita energia układu, równa sumie energii kinetycznej i
potencjalnej, jest stała.
9. Pęd, zasada zachowania pędu.
Pęd – w mechanice wielkość fizyczna opisująca ruch ciała. Pęd mają wszystkie formy
materii, np. ciała obdarzone masą, pole elektromagnetyczne, pole grawitacyjne.
Pęd punktu materialnego jest równy iloczynowi masy [m] i prędkości [v] punktu. Pęd jest
wielkością wektorową. Kierunek i zwrot pędu jest zgodny z kierunkiem i zwrotem prędkości.
W układzie SI jednostka pędu nie ma odrębnej nazwy, a jest określana za pomocą jednostek
prostszych, np. niuton · sekunda (N·s) lub kilogram · metr/sekunda (kg · m/s).
Zasada zachowania pędu: Jeżeli na układ nie działa żadna siła (lub działające siły się
równoważą) to całkowity pęd układu nie ulegnie zmianie 9jest zachowany).
S t r o n a
| 7
Copyright © 2008
all rights reserved WODZU!
,
,
10. Moment pędu, zasada zachowania momentu pędu.
Moment pędu (inaczej kręt) wielkość fizyczna opisująca ruch ciała, zwłaszcza ruch
obrotowy.
W tradycyjnej matematyce moment pędu jest wielkością wektorową (pseudowektor). Moment
pędu punktu materialnego względem zadanego punktu określony jest zależnością składowych
Gdzie:
L - to moment pędu punktu materialnego,
r - to wektor łączący punkt, względem którego określa się moment pędu i punkt ciała,
p - to pęd punktu materialnego
- iloczyn wektorowy wektorów.
Zasada zachowania momentu pędu: Jeżeli całkowity moment siły działającej na układ jest
równy zero to całkowity moment pędu układu nie ulegnie zmianie (jest zachowany).
,
,
11. Pole grawitacyjne, prawo powszechnego ciążenia, prawa Keplera.
Prawo powszechnego ciążenia:
Pole grawitacyjne to przykład siły centralnej. Jest to izotropowa siła centralna, istnieje zatem
dla niego potencjał U. Pole grawitacyjne jest siłą zachowawczą. W każdym układzie ciał,
oddziałujących poprzez pole grawitacyjne obowiązuje zasada zachowania momentu pędu.
Pole grawitacyjne to pole wytwarzane przez obiekty posiadające masę. Określa wielkość i
kierunek siły grawitacyjnej działającej na znajdujące się w nim inne obiekty posiadające
masę. Podstawową teorią opisującą pole grawitacyjne i jego związek z cechami przestrzeni
jest ogólna teoria względności, stworzona przez Alberta Einsteina.
Pole opisuje się poprzez podanie natężenia pola grawitacyjnego g, czyli siły F działającej na
masę jednostkową m , lub potencjału grawitacyjnego. Obrazem pola grawitacyjnego są linie
pola lub powierzchnie ekwipotencjalne. Kierunek i zwrot linii pola jest zgodny z kierunkiem i
zwrotem sił działających na masę punktową.
S t r o n a
| 8
Copyright © 2008
all rights reserved WODZU!
Pole grawitacyjne punktu lub jednorodnej kuli jest polem centralnym, ale w odniesieniu do
małej przestrzeni w porównaniu do odległości centrum grawitacji to pole może być uznane za
jednorodne.
Pole grawitacyjne jest bezpośrednio sprzężone z przestrzenią i wpływa na jej parametry-
zakrzywia przestrzeń. Z wielkości zakrzywienia czasoprzestrzeni można wyznaczyć
parametry źródła pola grawitacyjnego tj. masa lub gęstość energii, jak i na odwrót.
Blisko powierzchni źródła pola, natężenie pola grawitacyjnego jest równe przyśpieszeniu
grawitacyjnemu.
Prawa Keplera:
I prawo Keplera: Planety krążą wokół Słońca po elipsie, w której jednym z ognisk jest
Słońce. o parametrach
i mimośrodzie
.
II prawo Keplera: Prędkość polowa ruchu planet jest stała. Promień wodzący łączący Słońce
umieszczone w jednym z ognisk elipsy, z planetą, w jednakowych odstępach czasu zakreśla
jednakowe pola.
Prędkość polowa jest ściśle związana z momentem pędu planety
gdzie K to moment pędu planety, zaś m jest jej masą.
III prawo Keplera: Stosunek kwadratu okresu obiegu planety wokół Słońca do sześcianu
średniej arytmetycznej największego i najmniejszego oddalenia od Słońca jest stały dla
wszystkich planet w Układzie Słonecznym.
12. Bryła sztywna – moment bezwładności.
Bryła sztywna: Jest to ciało, którego dwa dowolne punkty nie zmieniają odległości
względem siebie, podczas ruchu. Bryła jest „sztywna”.
Moment bezwładności to miara bezwładności ciała w ruchu obrotowym. Im większy
moment, tym trudniej zmienić ruch obrotowy ciała, np. rozkręcić dane ciało lub zmniejszyć
jego prędkość obrotową.
gdzie:
m - masa fragmentów ciała oddalonych od osi obrotu o długość r
r - odległość fragmentów ciała od jego osi obrotu
S t r o n a
| 9
Copyright © 2008
all rights reserved WODZU!
Iloczyn
jest momentem bezwładności elementu ciała. Moment bezwładności ciała
zależy od wyboru osi obrotu, od kształtu ciała i od rozmieszczenia masy w ciele. Moment
bezwładności ma wymiar ML
2
. Zwykle mierzy się go w kgm
2
13. Energia kinetyczna bryły sztywnej.
Posługując się pojęciem momentu bezwładności można wyrazić energię kinetyczną
obracającego się ciała sztywnego w postaci:
14. Równanie dynamiki ruchy obrotowego.
Zgodnie z zasadą bezwładności tylko siła zewnętrzna może zmienić ruch ciała. Jeżeli
natomiast działające siły równoważą się, to ciało pozostaje w spoczynku lub porusza się
ruchem jednostajnym. Zasada ta obowiązuje również w ruchu obrotowym, ale trochę w
zmienionej treści:
Jeśli momenty wszystkich sił działających na ciało równoważą się wzajemnie, to ciało
pozostaje w spoczynku lub porusza się ruchem obrotowym jednostajnym (z prędkością
kątową stałą co do wielkości i kierunku).
z
z
z
z
I
dt
d
I
I
dt
d
M
15. Oscylator harmoniczny.
Oscylator harmoniczny, wyidealizowany układ fizyczny - punkt materialny o masie m, na
który działa siła proporcjonalna do chwilowego wychylenia x od pewnego położenia
równowagi. Klasyczne równanie ruchu oscylatora harmonicznego ma postać:
16. Oscylator tłumiony, wymuszony.
Oscylator tłumiony: Na poruszające się ciało o masie m, zawieszone na sprężynie o
współczynniku sprężystości k, działa siła tłumiąca, proporcjonalna do prędkości ciała.
, gdzie parametr tłumienia b jest stały.
S t r o n a
| 10
Copyright © 2008
all rights reserved WODZU!
Oscylator wymuszony: To przypadek oscylatora tłumionego, na który dodatkowo działa siła
zewnętrzna, periodyczna, tzn. jej równanie dane jest zależnością:
,
gdzie f, ω to odpowiednio amplituda i częstotliwość siły zewnętrznej.
17. Zjawisko rezonansu, występowanie rezonansu.
Rezonans – zjawisko fizyczne zachodzące dla drgań wymuszonych, objawiające się
pochłanianiem energii poprzez wykonywanie drgań o dużej amplitudzie przez układ drgający
dla określonych częstotliwości drgań.
Gdy ω = ω
0
, czyli gdy częstotliwość siły wymuszającej równa się częstotliwości drgań
własnych, w przypadku słabego tłumienia, gdy współczynnik tłumienia dąży do zera γ→0, a
τ→∞, otrzymujemy, że amplituda a dąży do nieskończoności, a realnie do dużych, bądź
bardzo dużych wartości. Zjawisko to nosi nazwę rezonansu i odgrywa bardzo ważną rolę w:
Układach mechanicznych,
Układach elektrycznych,
Układach magnetycznych.
KINEMATYKA I DYNAMIKA RELATYWISTYCZNA.
1. Postulaty szczególnej teorii względności.
Prawa fizyki są takie same we wszystkich inercjalnych układach odniesienia.
Prędkość światła c jest stała i niezależny od prędkości źródła.
C 299 792 458 1.2 m/s.
2. Transformacja Lorentza.
Transformacje Lorentza opisują zależności między współrzędnymi i czasem tego samego zdarzenia w
dwóch inercjalnych układach odniesienia wg szczególnej teorii względności.
gdzie,
S t r o n a
| 11
Copyright © 2008
all rights reserved WODZU!
3. Efekty relatywistyczne: składanie prędkości, dylatacja czasu,
skrócenie długości.
Efekty relatywistyczne, to efekty związane z prędkościami ciał bliskich prędkości światła.
- czas życia cząstek poruszających się z wielkimi prędkościami i czas życia cząstek spoczywających
jest różny;
- zmiana pędu cząstki rozpędzanej do dużych prędkości nie jest proporcjonalna do zmiany prędkości
(rośnie szybciej):
- energia kinetyczna cząstki poruszającej z prędkościami porównywalnymi z prędkością światła jest
większa niż obliczana klasycznie.
Składanie prędkości:
Transformacja Lorentza prowadzi do odpowiednich praw składania prędkości (innych niż dla
transformacji Galileusza). Definiując
i
otrzymujemy
Z tego prawa dodawania prędkości wynika, że gdy w jednym układzie ciało porusza się z
prędkością u = c, to w drugim układzie poruszającym się z prędkością v ciało nadal poruszać
się będzie z prędkością c.
Dylatacja czasu:
Jest to zjawisko różnic w pomiarze czasu dokonywanym równolegle w dwóch różnych
układach współrzędnych, z których jeden przemieszcza się względem drugiego.
Skrócenie długości:
Skrócenie długości obiektu, czyli mierzonego odstępu pomiędzy jego początkiem i końcem,
poruszającego się relatywistycznie w kierunku skrócenia np. pręta. Wynika to z zastosowania
Transformacji Lorentza do pomiaru. Długość pręta poruszającego sie z prędkością v w
układzie laboratoryjnym jest równa
długości pręta w jego układzie własnym.
4. Masa, pęd relatywistyczny.
Masa relatywistyczna jest to masa, która jest zmienna i zależna od prędkości układu. Masa
relatywistyczna rośnie wraz z prędkością poruszającego się obiektu (aż do nieskończoności
przy zbliżaniu się prędkości do prędkości światła).
S t r o n a
| 12
Copyright © 2008
all rights reserved WODZU!
Pęd relatywistyczny definiujemy analogicznie jak w mechanice klasycznej, tyle, że masa jest
tutaj masa relatywistyczną.
Pęd jest funkcją prędkości. Jeżeli działa stała, to ciało przyspiesza. Gdy dochodzimy do
prędkości bliskich prędkości światła, masa ciała zaczyna rosnąć. Aby przyspieszyć ciała o
niezerowej masie spoczynkowej do prędkości światła, musimy posłużyć się nieskończoną
siłą!
5. Energia relatywistyczna.
Za samo pojęcie energii relatywistycznej uważa się całkowitą energię ciała swobodnego
(takiego, które nie oddziałuje z innymi). Można tu określić dwa rodzaje cząstki: cząstkę w
spoczynku oraz cząstkę w ruchu. W przypadku cząstki nieruchomej energia relatywistyczna
jest równa energii spoczynkowej opisanej słynnym wzorem:
E=mc2
(m – masa cząstki, c – prędkość światła w próżni [C 299 792 458 1.2 m/s])
6. Deficyt masy.
Deficyt masy (niedobór masy, defekt masy) - różnica Δm między sumą mas nukleonów
wchodzących w skład jądra atomowego, a masą jądra. Iloczyn niedoboru masy i kwadratu
prędkości światła w próżni jest równy energii wiązania jądra, ΔE.
gdzie:
gdzie:
- nuklid zawierający N neutronów i Z protonów (N+Z = A).
m
p
=1,00727 - masa protonu w jednostkach masy atomowej.
m
n
=1,00866 - masa neutronu.
m
E
- masa jądra nuklidu.
c = 3·10
8
m/s - prędkość światła w próżni.
7. Źródło energii: reakcje rozpadu.
Rozszczepienie jądra atomowego to przemiana jądrowa polegająca na rozpadzie jądra na
dwa (rzadziej na więcej) fragmenty o zbliżonych masach. Zjawisku towarzyszy emisja
neutronów, a także kwantów gamma, które unoszą znaczne ilości energii. Reakcja
rozszczepienia jąder atomowych ma przebieg lawinowy – jedna reakcja łańcuchowa może
zainicjować kilka następnych. W celu kontrolowania szybkości reakcji tak by przebiegała z
S t r o n a
| 13
Copyright © 2008
all rights reserved WODZU!
jednakową prędkością (mówimy że reakcja ma przebieg łańcuchowy tzn. jedno
rozszczepienie inicjuje następne rozszczepienie jądra atomowego). Raz zapoczątkowana
będzie trwać dopóki będą jądra atomowe. Nie da się jej zatrzymać, ani przerwać.
8. Źródło energii: reakcje fuzji.
Reakcja termojądrowa, synteza jądrowa lub fuzja jądrowa – zjawisko polegające na
złączeniu się dwóch lżejszych jąder w jedno cięższe, w wyniku fuzji mogą powstawać obok
nowych jąder też wolne neutrony, protony, cząstki elementarne i cząstki alfa.
ELEKTRYCZNOŚĆ I MAGNETYZM.
1. Elektrostatyka. Prawo Coulomba.
Elektrostatyka to dziedzina fizyki zajmująca się oddziaływaniami pomiędzy nieruchomymi
ładunkami elektrycznymi. Oddziaływania te zwane są elektrostatycznymi. Elektrostatyka
rozpatruje też ładunki poruszające się, o ile pomija się wszystkie efekty wynikające z ruchu
ładunków z wyjątkiem zmiany ilości ładunku.
Prawo Coulomba głosi, że siła wzajemnego oddziaływania dwóch punktowych ładunków
elektrycznych jest wprost proporcjonalna do iloczynu tych ładunków i odwrotnie
proporcjonalna do kwadratu odległości między ich środkami. Jest to podstawowe prawo
elektrostatyki. Prawo to można przedstawić za pomocą wzoru:
,
w którym:
F - siła wzajemnego oddziaływania dwóch punktowych ładunków elektrycznych,
q
1
, q
2
- punktowe ładunki elektryczne,
r - odległość między ładunkami,
k - współczynnik proporcjonalności:
przy czym:
ε - przenikalność elektryczna ośrodka,
Jednostka ładunku elektrycznego, także nazwana na cześć Kulomba (Charles Coulomba),
jest równa połączonym ładunkom 6,24 x 10
18
protonów (lub elektronów).
Z prawa tego wynika między innymi, że:
Im większy ładunek będą posiadały przedmioty, tym między nimi będzie większa siła;
także im większa odległość będzie między przedmiotami, tym mniejsza siła będzie
między nimi.
S t r o n a
| 14
Copyright © 2008
all rights reserved WODZU!
2. Pole elektryczne: natężenie i potencjał, indukcja pola elektrycznego.
Pole elektryczne:
Pole fizyczne, stan przestrzeni w której na ładunek elektryczny działa siła. Pole to opisuje się
przez natężenie pola elektrycznego lub potencjał elektryczny.
Natężenie pola elektrycznego:
Jest parametrem pola wektorowego
, definiowanym jako stosunek siły
działającej na
ładunek elektryczny q znajdujący się w tymże polu elektrycznym do wartości tegoż ładunku
elektrycznego q:
Ładunek z pomocą którego określa się pole, zwany ładunkiem próbnym, musi spoczywać i
być na tyle mały, by nie zmieniać układu ładunków w otaczającej przestrzeni.
Potencjał pola elektrycznego:
Jest to energia potencjalna pola elektrycznego przypadająca na jednostkę ładunku:
Indukcja pola elektrycznego:
W fizyce wielkość używana do opisu pola elektrycznego. Indukcja elektryczna D jest
zdefiniowana jako:
Jednostką indukcji elektrycznej w układzie SI jest kulomb na metr kwadrat (C/m²).
3. Prawo Gaussa dla pola elektrycznego.
Prawo Gaussa dla elektryczności w fizyce zwane również twierdzeniem Gaussa to prawo
wiążące pole elektryczne z jego źródłem czyli ładunkiem elektrycznym.
Pole elektryczne jest polem wektorowym, dlatego też zgodnie z twierdzeniem Gaussa-
Ostrogradskiego można zdefiniować wielkość zwaną strumieniem natężenia pola: strumień
natężenia pola elektrycznego przenikający przez dowolną powierzchnię zamkniętą w
jednorodnym środowisku o bezwzględnej przenikalności dielektrycznej ε, jest równy
stosunkowi całkowitego ładunku znajdującego się wewnątrz tej powierzchni do wartości
tejże przenikalności.
Strumień pola elektrycznego Φ przenikający przez zamkniętą powierzchnię S, ograniczającą
obszar o objętości V, jest proporcjonalny do ładunku elektrycznego Q
S
zawartego w tym
obszarze (objętości):
S t r o n a
| 15
Copyright © 2008
all rights reserved WODZU!
4. Praca pola elektrycznego i napięcie.
Praca prądu elektrycznego jest sumą prac sił opisujących oddziaływanie poruszających się
ładunków elektrycznych z siecią krystaliczną przewodnika (grzałki, żarówki, itp.) lub z
innymi poruszającymi się ładunkami wytwarzającymi pole magnetyczne (silniki prądu
stałego).
Praca prądu elektrycznego w obwodzie prądu stałego jest równa iloczynowi napięcia źródła
energii elektrycznej, natężenia prądu przepływającego przez odbiornik oraz czasu przepływu
prądu. W przypadku zmian natężenia prądu lub napięcia praca jest sumą prac elementarnych
podobnie jak w przypadku zmian siły.
Jednostką pracy w tym przypadku jest wolt
· amper
· sekunda równy dżulowi (J)
Napięcie elektryczne – różnica potencjałów elektrycznych między dwoma punktami obwodu
elektrycznego lub pola elektrycznego. Napięcie elektryczne to stosunek pracy wykonanej
podczas przenoszenia ładunku między punktami, dla których określa się napięcie do wartości
tego ładunku.
Przy założeniu, że przenoszony ładunek jest na tyle mały, że nie wpływa na otoczenie. W
przypadku źródła napięcia (prądu) elektrycznego jest jego najważniejszym parametrem i
określa zdolności źródła energii elektrycznej do wykonania pracy. Napięcie na źródle
napięcia jest mniejsze od siły elektromotorycznej źródła o spadek napięcia na oporze
istniejącym wewnątrz źródła (opór wewnętrzny).
Napięcie elektryczne w obwodach elektrycznych opisuje drugie prawo Kirchhoffa (Drugie
prawo Kirchhoffa - zwane również Prawem napięciowym, dotyczy bilansu napięć w
zamkniętym obwodzie elektrycznym. Treść prawa: Suma wartości chwilowych sił
elektromotorycznych występujących w obwodzie zamkniętym równa jest sumie wartości
chwilowych napięć elektrycznych na elementach pasywnych tego obwodu)
5. Dipol elektryczny. Polaryzacja. Własności elektryczne materii.
Dipol elektryczny:
To
układ dwóch różnoimiennych ładunków elektrycznych q, umieszczonych w pewnej
odległości l od siebie. Linia przechodząca przez oba ładunki nazywa się osią dipola; tego
rodzaju dipole wykazują elektryczny moment dipolowy.
Polaryzacja:
Rozdzielenie elementów układu na dwie grupy.
Polaryzacja magnetyczna (namagnesowanie = magnetyzacja M) - zjawisko częściowego lub
całkowitego uporządkowania momentów magnetycznych atomów ośrodka materialnego
charakteryzującego się trwałym momentem magnetycznym atomów, na skutek umieszczenia tego
ośrodka w polu magnetycznym.
S t r o n a
| 16
Copyright © 2008
all rights reserved WODZU!
Indukcja elektrostatyczna (zwana też influencją elektrostatyczną) - zjawisko fizyczne, sposób
elektryzowania ciała w wyniku zbliżenia do niego naelektryzowanego ciała.
Właściwości elektryczne materii.
Materię dzielimy, ze względu na to jak reaguje na przyłożone zewnętrzne pole
elektryczne, na dwie główne grupy:
a) dielektryki (e ³1 ),
Dielektryki tworz
ą
materiały, zbudowane z cz
ą
steczek niepolarnych, czyli
cz
ą
steczek, które nie posiadaj
ą
trwałych elektrycznych momentów dipolowych.
Obecno
ś
ci pola elektrycznego powoduje indukowanie momentu dipolowego, poprzez
przesuni
ę
cie
ś
rodków ci
ęż
ko
ś
ci ładunków dodatnich i ujemnych. Zjawisko to nosi
nazw
ę
polaryzacji elektronowej. Pole elektryczne porz
ą
dkuje jednocze
ś
nie dipole
elektryczne zgodnie z zwrotem pola.
Jest to polaryzacja kierunkowa.
b) paraelektryki (e >>1 ),
Cząstki niepolarne to cząstki o budowie symetrycznej, jak: H2, N2, O2, czy gazy
szlachetne. Paraelektryki to materiały, których cząsteczki posiadają trwały
elektryczny moment dipolowy (cząstki polarne) również w nieobecności pola
elektrycznego. Doskonałym przykładem jest cząsteczka wody (H2O). W nieobecności
zewnętrznego pola elektrycznego paraelektryki nie wykazują pola elektrycznego,
ponieważ dipole elektryczne są zorientowane w sposób przypadkowy, chaotyczny, i
pola dipoli wzajemnie się znoszą.
c) ferroelektryki.
S
ą to materiały wykazujące pole elektryczne w nieobecności zewnętrznego pola
elektrycznego. Charakterystyczną cechą ferroelektryków jest struktura domenowa, co
powoduje np. występowanie histerezy.
Analogicznie, w przypadku pola magnetycznego materię dzielimy na
diamagnetyki, paramagnetyki, ferromagnetyki.
6. Przepływ prądu. Prawo Ohma (postać zwykła i różniczkowa).
Przepływ prądu:
W pewnej grupie materiałów, zwanych przewodnikami, przyłożone pole elektryczne
wywołuje przepływ elektronów, zgodnie z różnica potencjałów (przyłożonym napięciem).
Prawo Ohma:
Natężenie prądu stałego I jest proporcjonalne do całkowitej siły elektromotorycznej w
obwodzie zamkniętym lub do różnicy potencjałów (napięcia elektrycznego) między końcami
części obwodu nie zawierającej źródeł siły elektromotorycznej. Stosunek natężenia prądu
płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały.
I - natężenie prądu (w układzie SI w amperach – A)
U - napięcie między końcami przewodnika (w układzie SI w woltach – V)
Wzór na prawo Ohma:
S t r o n a
| 17
Copyright © 2008
all rights reserved WODZU!
7. Opór, zależność temperaturowa oporu, łączenie oporników.
Rezystancja (opór) jest miarą oporu czynnego, z jakim element przeciwstawia się
przepływowi prądu elektrycznego. Zwyczajowo rezystancję oznacza się symbolem (wielka
litera R). Jednostką rezystancji w układzie SI jest om (1 Ω).
Dla większości materiałów ich rezystancja nie zależy od natężenia prądu, wówczas natężenie
prądu jest proporcjonalne do przyłożonego napięcia. Prawo Ohma określa opór elektryczny
przewodnika:
Zależności temperaturowe:
Opór jest zależny od temperatury. Wzrasta, gdy zwiększa się temperatura i maleje gdy
temperatura też maleje.
Łączenie szeregowe oporników:
Opór zastępczy układu N szeregowo połączonych oporników jest równy:
Łączenie równoległe oporników:
Opór zastępczy układu N równolegle połączonych oporników jest równy:
8. Pojemność elektryczna. Kondensatory, łączenie kondensatorów.
Pojemnością elektryczną odosobnionego przewodnika nazywamy wielkość fizyczna C
równą stosunkowi ładunku q zgromadzonego na przewodniku do potencjału
tego
przewodnika.
Odosobniony przewodnik to ciało znajdujące się w tak dużej odległości od innych ciał, że
wpływ ich pola elektrycznego jest pomijalny. Jednostką pojemności elektrycznej jest farad.
Pojemność wzajemna dwóch naładowanych przewodników, zawierających ładunki q i -q
wynosi:
gdzie:
i
to potencjały tych przewodników.
Pojemność wzajemna jest podstawowym parametrem układów elektrycznych gromadzących
ładunek w wyniku różnicy potencjałów w tym i kondensatorów. Określenie wzajemna jest
zazwyczaj pomijane.
Kondensator to element elektryczny (elektroniczny) zbudowany z dwóch przewodników
(okładzin) rozdzielonych dielektrykiem.
S t r o n a
| 18
Copyright © 2008
all rights reserved WODZU!
Doprowadzenie napięcia do okładzin kondensatora powoduje zgromadzenie się na nich
ładunku elektrycznego. Jeżeli kondensator jako całość nie jest naelektryzowany, to cały
ładunek zgromadzony na jego okładkach jest jednakowy, ale przeciwnego znaku.
Kondensator charakteryzuje pojemność określająca zdolność kondensatora do gromadzenia
ładunku:
gdzie:
C - pojemność, w faradach
Q - ładunek zgromadzony na jednej okładce, w kulombach
U - napięcie elektryczne między okładkami, w woltach.
Pojemność wyrażana jest w faradach. Jeden farad to bardzo duża jednostka, dlatego w
praktyce spotyka się kondensatory o pojemnościach piko-, nano-, mikro- i milifaradów.
Ogólnie, napięcie u
C
i prąd i
C
kondensatora w chwili t związane są zależnością:
Pracę dW, jaką trzeba wykonać by przenieść niewielki ładunek dq z jednej okładki
kondensatora, o pojemności C, na drugą, przy założeniu, że jedna z okładek jest naładowana
ładunkiem q.
Energię zmagazynowaną w kondensatorze oblicza się przez scałkowanie powyższego wzoru,
uzyskując:
przy czym Q jest ładunkiem, do którego naładowano kondensator.
Prąd elektryczny to zmiana ładunku w czasie, co można zapisać:
Kondensator podłączony do napięcia stałego po pewnym czasie naładuje się do tego napięcia
kondensator jest wówczas równoważny przerwie w obwodzie (i
c
(t) = 0). Dla prądu
przemiennego przez kondensator płynie prąd określony wzorem:
S t r o n a
| 19
Copyright © 2008
all rights reserved WODZU!
Wielkość, wiążąca prąd i napięcie na kondensatorze nazywa się reaktancją, która jest tym
mniejsza, im większa jest pojemność kondensatora i częstotliwość prądu. Kondensator
charakteryzuje się tym, że (dla sygnałów sinusoidalnych) napięcie jest opóźnione w fazie
względem prądu o kąt
(inaczej: prąd wyprzedza napięcie o kąt
). Z tego względu
impedancja kondensatora jest liczbą zespoloną i opisana jest wzorem:
gdzie:
ω
- to częstość,
f
- to częstotliwość w hercach.
Ł
ą
czenie równoległe kondensatorów:
Pojemno
ść
zast
ę
pcza układu N równolegle poł
ą
czonych kondensatorów jest równa:
Ł
ą
czenie szeregowe oporników:
Opór zast
ę
pczy układu N szeregowo poł
ą
czonych oporników jest równy:
9. Pole magnetyczne, wielkości charakteryzujące pole magnetyczne.
Pole magnetyczne w fizyce jest stanem (własnością) przestrzeni, w której siły działają na
poruszające się ładunki elektryczne, a także na ciała mające moment magnetyczny niezależnie
od ich ruchu. Pole magnetyczne jest polem wektorowym, wielkości fizyczne używane do
opisu pola magnetycznego to indukcja magnetyczna B oraz natężenie pola magnetycznego H
(te dwie wielkości są powiązane ze sobą poprzez przenikalność magnetyczną).
Indukcja magnetyczna w fizyce wielkość wektorowa opisująca pole magnetyczne. Wektor
ten określa siłę Lorentza, z jaką pole magnetyczne działa na poruszający się w nim ładunek
elektryczny :
gdzie
jest siłą działającą na ładunek q, poruszający się z prędkością
w polu o indukcji
magnetycznej
. Jednostką indukcji magnetycznej jest jedna Tesla 1T.
Natężenie pola magnetycznego – to wielkość wektorowa charakteryzująca pole
magnetyczne, w ogólnym przypadku określana z użyciem prawa Ampera wzorem:
S t r o n a
| 20
Copyright © 2008
all rights reserved WODZU!
gdzie:
- natężenie pola magnetycznego,
I - prąd przepływający przez powierzchnię ograniczoną krzywą C.
Jego jednostką w układzie SI jest A/m (amper na metr). Natężenie pola magnetycznego nie
zależy od właściwości magnetycznych środowiska.
Przenikalność magnetyczna jest to wielkość określającą zdolność danego materiału
(ośrodka) do zmiany wektora indukcji magnetycznej pod wpływem wektora natężenia pola
magnetycznego. Przenikalność magnetyczna próżni, zgodnie z danymi opublikowanymi w
2002 roku przez Komitet Danych dla Nauki i Techniki (CODATA), jest skalarem, który
oznacza się symbolem μ
0
i którego wartość wynosi w układzie SI:
Dla próżni doskonałej spełnione jest więc równanie:
10. Siła Lorentza. Przewodnik z prądem w polu magnetycznym.
Siła Lorentza w fizyce, to siła jaka działa na cząstkę obdarzoną ładunkiem elektrycznym
znajdującą się w polu elektromagnetycznym. Prawo (wzór) podane po raz pierwszy przez
Lorentza i nazwane na jego cześć.
Wzór określa, jak na siłę działającą na ładunek wpływają pole elektryczne i pole magnetyczne
jako składniki pola elektromagnetycznego:
gdzie:
F - siła (w niutonach)
E – natężenie pola elektrycznego (w woltach / metr)
B - indukcja magnetyczna (w teslach)
q – ładunek elektryczny cząstki (w kulombach)
v – prędkość cząstki (w metrach na sekundę)
× - iloczyn wektorowy.
Przepływ prądu elektrycznego powoduje powstanie pola magnetycznego. Linie pola
magnetycznego, wytworzonego przez prostoliniowy przewodnik z prądem, tworzą
koncentryczne okręgi wokół tego przewodnika. Zwrot linii pola magnetycznego podany jest
przez regułę prawej dłoni.
S t r o n a
| 21
Copyright © 2008
all rights reserved WODZU!
11. Prawo Ampera. Prawo Biota - Savarta.
Prawo Ampera: Ampère, będąc zwolennikiem oddziaływania na odległość a nie
oddziaływania przez pole, nie wyraził prawa w postaci równania pola, opisał jedynie
zależność siły oddziaływania od odległości.
Wartość całki okrężnej wektora natężenia pola magnetycznego, wytworzonego przez stały
prąd elektryczny w przewodniku wzdłuż linii zamkniętej otaczającej prąd, jest równa sumie
algebraicznej natężeń prądów przepływających (strumieniowi gęstości prądu) przez dowolną
powierzchnię objętą przez tę linię.
Co dla próżni można wyrazić wzorem:
- to całka liniowa po linii zamkniętej C.
- to niewielki element linii całkowania C,
- to prąd objęty krzywą C,
- to przenikalność magnetyczna próżni (w henrach na metr).
Prawo Biota – Savarta:
Prawo określające natężenie pola magnetycznego H powstającego w punkcie O(x
0
,y
0
,z
0
) w
wyniku przepływu prądu elektrycznego o gęstości j (x,y,z):
gdzie całkowanie odbywa się po całym obszarze przepływu prądu.
R jest różnicą wektorów wodzących dla punktu O i bieżącego punktu (x,y,z),
R =|R|, stała k zależy od wyboru układu jednostek, w układzie SI k= (4π)
-1
.
Dla prostego przypadku nieskończenie cienkiego przewodu prawo Biota-Savarta można
wyrazić wzorem:
H=kI∫(R
-3
)(dl×R),
gdzie R, H, R, k zdefiniowane jak powyżej,
dl - nieskończenie mały wektor styczny w danym miejscu do przewodu,
I - natężenie prądu, całkowanie wykonuje się wzdłuż przewodu.
12. Prawo Gaussa dla pola magnetycznego.
Całkowity strumień magnetyczny przechodzący przez powierzchnię zamkniętą równa się
zeru. Fakt ten wynika stąd, iż pole magnetyczne jest bezźródłowe - nie istnieją w świecie
ładunki magnetyczne, dywergencja pola jest wszędzie równa zero.
S t r o n a
| 22
Copyright © 2008
all rights reserved WODZU!
13. Dipol magnetyczny, magnetyzacja, własności magnetyczne materii.
Dipol magnetyczny - układ wytwarzający pole magnetyczne, które cechuje magnetyczny
moment dipolowy np. magnes, solenoid, pętla z prądem.
Magnetyzacja (namagnesowanie) jest właściwością materiałów (m. in. magnesów), która
opisuje pole magnetyczne wytwarzane przez materiał. Przez magnetyzację rozumie się także
wielkość fizyczną określającą wytwarzane przez materiał pole magnetyczne, definiuje się ją
określenie momentów magnetycznych wytworzonych w jednostce objętości. Pochodzenie
momentów magnetycznych tworzących magnetyzację może być albo mikroskopową
odpowiedzią na prądy elektryczne odpowiadające ruchowi elektronów w atomach albo
spinów elektronowych.
W niektórych materiałach (np.: ferromagnetykach) magnetyzacja istnieje nawet bez obecności
zewnętrznego pola magnetycznego (magnetyzacja spontaniczna). W innych typach
materiałów magnetyzacja jest indukowana tylko gdy obecne jest zewnętrzne pole
magnetyczne. Magnetyzacja nie jest homogeniczna w całej objętości danego ciała. Jest
funkcją położenia.
Magnetyzację definiuje równanie:
gdzie:
- Natężenie pola magnetycznego
μ
0
- przenikalność magnetyczna próżni
- magnetyzacja.
Własności magnetyczne materii:
Pole magnetyczne w ośrodku zmienia się ze względu na oddziaływanie magnetyczne
cząsteczek, dipoli magnetycznych.
· diamagnetyki, µ≤1;
· paramagnetyki, µ ≥1;
· ferromagnetyki, µ >> 1.
Diamagnetyki to materiały o zerowym dipolowym momentem magnetycznym w
nieobecności
zewnętrznego
pola
magnetycznego.
Obecność
zewnętrznego
pola
magnetycznego indukuje prąd na orbicie atomu; prąd, który tak płynie, aby wytworzony przez
nie pole magnetyczne było przeciwnie skierowane do przyłożonego, zewnętrznego pola
magnetycznego. Jest to atomowa wersja reguły Lentza: indukowane pole magnetyczne
sprzeciwia się polu magnetycznemu, które go wytworzyło.
Paramagnetyki, zawierają niezerowe momenty dipolowe magnetyczne. Powoduje to, że ich
magnetyzacja jest proporcjonalna do przyłożonego pola magnetycznego (B), a odwrotnie
proporcjonalna do temperatury (T). Jest to
prawo Curie:
gdzie:
C – stała Curie,
M – magnetyzacja,
S t r o n a
| 23
Copyright © 2008
all rights reserved WODZU!
Ferromagnetyki, to materiały, będące szczególnym rodzajem paramagnetyków. O ile w
paramagnetykach, dipole magnetyczne są ułożone losowo, to w ferromagnetykach istnieje
oddziaływanie długozasięgowe, które porządkuje ułożenie momentów magnetycznych w
specyficzny sposób. Wynikiem istnienia oddziaływania długozasięgowego jest powstanie
struktury domenowej w całej objętości materiału, co dalej skutkuje zjawiskiem histerezy
magnetycznej.
14. Indukcja elektromagnetyczna, prawo Faradaya.
Indukcja magnetyczna w fizyce wielkość wektorowa opisująca pole magnetyczne. Wektor
ten określa siłę Lorentza, z jaką pole magnetyczne działa na poruszający się w nim ładunek
elektryczny :
gdzie
jest siłą działającą na ładunek q, poruszający się z prędkością
w polu o indukcji
magnetycznej
. Jednostką indukcji magnetycznej jest jedna Tesla 1T
Prawo indukcji elektromagnetycznej Faradaya to prawo oparte na doświadczeniach
Faradaya z 1831 roku. Wyraża relację pomiędzy zmianą wartości strumienia magnetycznego
przechodzącego przez obszar objęty przez zamkniętą pętlę i pola elektrycznego
wyindukowanego na tej pętli:
Może też być wyrażone w postaci:
gdzie:
V - siła elektromotoryczna powstająca w pętli,
E - natężenie wyindukowanego pola elektrycznego,
l - pętla,
dl - nieskończenie mały odcinek pętli,
Φ
B
- strumień indukcji magnetycznej,
dt - nieskończenie mały odcinek czasu,
s - powierzchnia zamknięta pętlą l,
- szybkość zmiany strumienia indukcji magnetycznej,
B - indukcja magnetyczna.
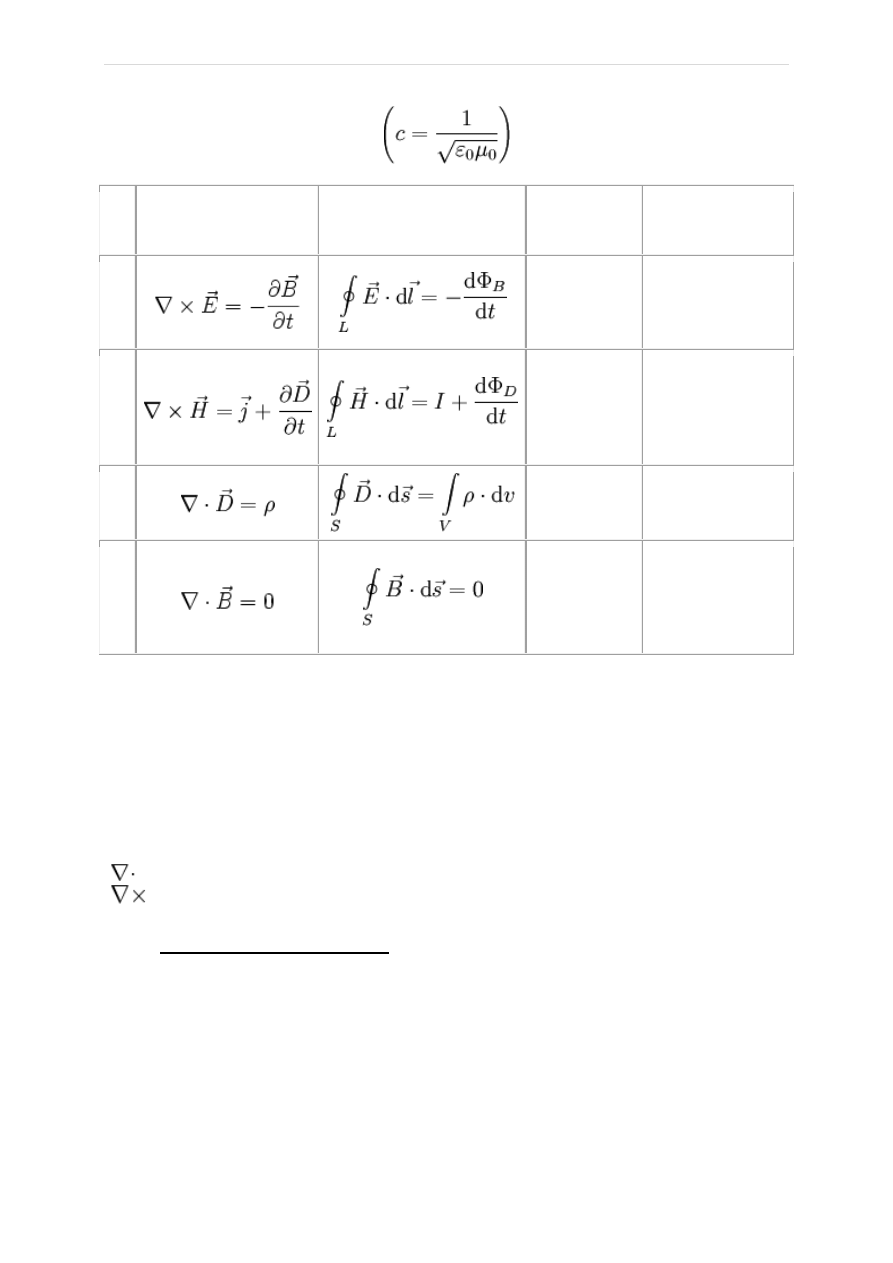
15. Równania Maxwella.
Równania Maxwella - cztery podstawowe równania elektromagnetyzmu sformułowane
przez Jamesa Clerka Maxwella. Opisują one własności pola elektrycznego i magnetycznego
oraz zależności między tymi polami. Z równań Maxwella można wyprowadzić równanie
falowe fali elektromagnetycznej propagującej się (rozchodzącej się) w próżni z prędkością
światła.
S t r o n a
| 24
Copyright © 2008
all rights reserved WODZU!
Lp.
Nazwa
Zjawisko fizyczne
opisywane przez
równanie
1.
Zmienne w czasie
pole magnetyczne
wytwarza wirowe
pole elektryczne
2.
rozszerzone
przez
Przepływający prąd
oraz zmienne pole
elektryczne
wytwarzają wirowe
pole magnetyczne
3.
dla
elektryczności
Źródłem pola
elektrycznego są
ładunki
4.
dla
magnetyzmu
Pole magnetyczne
jest bezźródłowe,
linie pola
magnetycznego są
zamknięte
gdzie:
D
- indukcja elektryczna, [ C / m
2
]
B
- indukcja magnetyczna, [ T ]
E
- natężenie pola elektrycznego, [ V / m ]
H
- natężenie pola magnetycznego, [ A / m ]
Φ
D
- strumień indukcji elektrycznej, [ C = A·s]
Φ
B
- strumień indukcji magnetycznej, [ Wb ]
j
- gęstość prądu, [A/m
2
]
ρ
3
]
- operator dywergencji, [1/m],
- operator rotacji, [1/m].
16. Fale elektromagnetyczne.
Fale
elektromagnetyczne,
rozchodzące
się
w
przestrzeni
zaburzenia
pola
elektromagnetycznego. Źródłem fale elektromagnetyczne są to ładunki elektryczne
poruszające się z przyspieszeniem względem inercjalnego układu odniesienia i zmienne prądy
elektryczne; zakres długości fal od ok. 10
-14
m do tysięcy km (widmo fal
elektromagnetycznych obejmuje: promieniowanie γ, promieniowanie rentgenowskie,
nadfioletowe, światło widzialne, promieniowanie podczerwone, mikrofale, fale radiowe).
Wyszukiwarka
Podobne podstrony:
Opracowanie na egzamin z fizyki, semestr I(1)
EKONOMIA - opracowane zagadnienia (egzamin - dr A.Cybula)
podstawy ekonomii wydanie 3 opracowanie zagadnień egzami XB6IM6EJ454DCWUTMGAL3A5F7N3PYACYS7LHEFQ
Zrozumieć Rozwój - opracowanie zagadnień egzaminacyjnych TRS
FIZYKA OPRACOWANIE ZAGADNIEŃ EGZAMINACYJNYCH
Opracowane zagadnienia egzaminacyjne 2010, do Szkoły, matura, praca mgr i podyplom., encyklopedie, ś
opracowane zagadnienia egzaminacyjne 11 Spis treści
Filozofia - opracowane zagadnienia egzaminacyjne, Filozofia(1)
Opracowanie zagadnień egzaminacyjnych radykalizm i fundamentalizm islamski, Radykalizm i fundamental
Makroekonomia - opracowanie zagadnień egzaminacyjnych
Socjologia mikrostruktury społeczne opracowane zagadnienia egzaminacyjne II semestr, pliki zamawiane
Opracowane zagadnienia z egzaminu (z lat poprzednich), Socjologia wychowania
Gospodarka Mieniem Komunalnym - opracowanie zagadnień egzaminacyjnych, Gospodarka Mieniem Komunalnym
więcej podobnych podstron