
ELEMENTY TEORII MOŻLIWOŚCI
Opracował: M. Kwiesielewicz
Zadeh (1978) wprowadził pojęcie rozkładu możliwości jako rozmyte
ograniczenie, kóre odziaływuje w sposób elastyczny na wartości
przypisane danej zmiennej.
Definicja. Niech F będzie zbiorem rozmytym, zdefiniowanym na
przestrzeni rozważań U z funkcją przynależności
µ
F
, ze stopniem
przynależności
( )
µ
F
u
, rozumianym jako zgodność (ang.
compatibility) elementu u z pojęciem F. Niech ponadto X będzie
zmienną przyjmującą wartości w U oraz niech F jest rozumiane jako
ograniczenie rozmyte
( )
R X
związane z X. Wówczas zdanie “X jest
F” , które można przedstawić jako:
( )
R
F
X
=
,
co wyraża rozkład możliwości
Π
X
że zmienna X jest równa
( )
R X
:
( )
Π
X
X
=
R
.
Powyższą zależność mozna zapisać również jako:
Π
X
=
F
.
Funkcja rozkładu możliwości związana ze zmienną X lub funkcja
rozkładu mozliwości
Π
X
jest określona następująco:
π
µ
X
F
=
,
Jak wynika z powyższej definicji rozkład możliwości można opisać
za pomocą zbioru rozmytego, natomiast funkcję rozkładu możliwości
za pomocą funkcji charakterystycznej zbioru rozmytego.

Inne podejście do teorii możliwości zaproponowali Dubois i Prade
(1983).
Experyment statystyczny - rzut monetą.
Zbiór zdarzeń elementarnych
{
}
X
x
x
=
=
=
1
2
orzeł, reszka
.
Założymy, że moneta jest zniekształcona (ang. biased):
1
1
2
1
1
2
1
≥
≥ ≥
= −
p
p
p .
Można wprowadzić stopień potrzeby (ang. necessity) na korzyść
zajścia zdarzenia
x
1
zdefiniowany następująco:
n
p
p
1
1
2
=
−
,
co również oznacza niemożliwość zajścia zdarzenia
x
2
. Odpowiedni
stopień możliwości zajścia zdarzenia
x
2
wyrazi się następującą
zależnością:
π
2
1
2
1
2
= −
=
n
p
.
Pozostałe stopnie zdefiniowane są następująco:
n
2
1
0
1
=
=
,
.
π
Warto zauważyć, że danemu zdarzeniu przyporządkowana jest para
(potrzeba, możliwość).
W oparciu o przedstawioną ideę można zdefiniować transformację
prawdopodobieństwo - możliwość i odwrotnie.
ZAŁOŻENIA:
•
zbiór zadarzeń elementarnych:
{
}
X
x i
n
i
=
=
;
,
,
1 2!
•
uporządkowanie
p
p
p
n
1
2
≥
≥ ≥
!
, gdzie
{ }
( )
p
P x
p
i
i
i
i
n
=
=
=
∑
,
1
1
•
P jest miarą prawdopodobieństwa
•
{
}
A
i
i
x x
x
=
1
2
, ,!
oraz
A
0
= ∅
.
Definicja. Stopniem potrzeby zajścia zdarzenia A
∈
X jest dodatkowa
ilość prawdopodobieństwa związanego ze zdarzeniami elementarnymi
ze zbioru A w porównaniu z ilością prawdopodobieństwa przypisaną
najczęściej występującemu zdarzeniu nie należącemu do zbioru A:
( )
N
p
p
j
k
x
A
x
k
j
A
A
=
−
∉
∈
∑
max
max
,0 .
Jeśli
A
A
=
i
otrzymujemy
( )
(
)
N
p
p
i
n
i
j
i
j
u
A
=
−
=
+
=
∑
1
1
1
,
, ,
! ,
gdzie:
p
n
+
=
1
0
.
Jeśli N(A) Potraktujemy jako stopień niemożliwości wystąpienia
zdarzenia przeciwnego A, wówczas można zdefiniować stopień
możliwości zajścia zdarzenia A jako:
( )
( )
∀ ∈
= −
A
A
A
X
N
Π
1
.
Jeśli przyjmiemy, że
Π
( )
A
jest miarą możliwości w sensie Zadeha
(1978), wówczas otrzymamy:
( )
Π
A
A
=
∈
max
x
i
i
π
Uwaga. Miara możliwości i miara potrzeby mogą być obliczone na
podstawie rozkładu możliwości, który jest zdefiniowany za pomocą
zbioru rozmytego:
( )
( )
(
)
( )
( )
(
)
N
x
x
x
x
A
A
A
F
A
F
=
−
=
∉
∈
inf
,
sup
1
µ
µ
Π
,
gdzie F jest zbiorem rozmytym związanym z rozkładem możliwości.

Na podstawie przedstawionych zależności otrzymujemy (Dubois and
Prade 1983):
•
Transformacja prawdopodobieństwo-możliwość:
(
)
∀
=
=
∑
i
p p
i
i
j
j
n
π
min
,
1
•
Przekształcenie odwrotne:
(
)
∀ =
=
−
=
+
∑
i
n p
j
i
j i
n
i
j
1
1
1
, ,
!
π
π
, gdzie:
π
n
+
=
1
0
.
•
Dla przypadku ciągłego (Dubois and Prade 1982):
( )
( ) ( )
(
)
∀ ∈
=
∫
x
x
p
p t dt
R
R
π
min
x ,
•
Spełniony jest warunek:
( ) ( )
( )
∀
≤
≤
A
A
A
A
N
P
Π
.
!!!!

Teoria Shafera (1976)
Definicja. Niech dana będzie przestrzeń zdarzeń elementarnych
Ω
,
rodzina
S jej podzbiorów oraz dowolne zdarzenie
A A
,
,
, , ,
i
S i
n
⊂
=
1 2 ! . Funkcja pewności jest funkcją rzeczywistą
Bel spełniającą następujące aksjomaty
(i)
( )
∀ ∈ ⊂
≥
A
A
S
P
Ω
,
0,
(ii)
( )
P
P
Ω
=
∅ =
1
0
, ( )
, ,
(iii)
∀
∈ ⊂
A A
A
1
2
n
S
,
, ,
;
!
Ω
zachodzi:
( )
(
)
( )
Bel
Bel
Bel
Bel
i
i
n
i
i
n
i
j
j i
n
i
i
n
A
A
A
A
A
=
=
<
+
=
≥
−
∩
+ + −
∑
∑
1
1
1
1
1
"
#
!
.
Definiuje on przekształcenie m, nazywane podstawowym
przyporządkowaniem probabilistycznym, przyporządkowujące część
wiedzy każdemu ze zdarzeń:
( )
( )
m
m
∅ =
=
⊆
∑
0
1
,
B
B
Ω
.
Zbiór elementów fokalnych określa się następująco:
( )
{
}
B
B
/ m
>
0
.
Na podstawie elementów fokalnych dla danego zdarzenia A można
policzyć dwie miary:
pewności (ang. belief):
( )
( )
Bel
m
A
B
B A
=
⊆
∑
oraz wiarygodności (ang. plausibility):
( )
( )
Pl
m
A
B
B A
=
∩ =∅
∑

Podejście zaproponowane przez Shafer’a wywodzi się z pracy
Dempster’a (1967).
ZAŁOŻENIA:
•
elementy fokalne odpowiadają wynikom eksperymentu
stochastycznego ze zbioru X,
•
istnieje pewne odwzorowanie które każdemu wynikowi x
X
∈
przyporządkowuje rzeczywiste zdarzenie
( )
Γ
Ω
x
⊆
,
•
p(x) jest estymowanym prawdopodobieństwem wyniku x.
Przyporządkowanie podstawowe definiuje się następująco:
( )
( )
( )
∀
=
=
A
A
A
m
p x
x
gdy
w przeciwnym przypadku
Γ
0
.
Uwaga.
( )
Γ
x
=
A modeluje niedokładność eksperymentu
statystycznego:
Mamy tu do czynienia z tzw. niedokładnym prawdopodobieństwem:
( )
( )
( )
Bel
P
Pl
A
A
A
≤
≤
Ω
Jeśli zbiór wyników X potrafimy uporządkować:
( )
( )
{
}
( )
( )
( )
( )
x
x
X
x
x
p
p
1
1
, ,
,
!
$
=
⊆ ⊆
Γ
Γ
to miara pewności i wiarygodności stają się odpowiednio miarami
potrzeby i możliwości.
Uwagi. W oparciu o przedstawione podejście można zaproponować
sposób opisu rozpatrywanego modelu w zależności od typu
dostępnych danych:
•
jeśli dane są dokładne i posiadamy ich wystarczającą liczbę
stosujemy podejście probabilistyczne;
•
jeśli dane są niedokładne, ale zgodne stosujemy podejście
możliwościowe Dubois i Prade’a;
•
jeśli dane są niedokładne i niezgodne stosujemy podejście Shafer’a
•
jeśli dane są niedokładne i operujemy pojęciami nieostrymi
stosujemy podejście rozmyte.
Metody identyfikacja funkcji przynależności
Istnieje kilka głównych metod określania funkcji przynależności:
•
subiektywna ewaluacja,
•
metody ad-hoc,
•
transformacja w oparciu o histogram,
•
określenie funkcji przynależności w oparciu o teorię możliwości,
•
fuzzyfikacja przestrzeni rozważań,
•
skalowanie psychologiczne,
Przykład. Załóżmy, że rozważamy zbiór osób pracujących przy
danym typie maszyny i zamierzamy utworzyć zbiór rozmyty
“popełniający błędy”. Wtedy macierz R może wyglądać następująco:
Jan Marek Jerzy Marian
Jan
1
3
5
7
Marek
1/3 1
3
5
Jerzy
1/5 1/3
1
5
Marian
1/7 1/5
1/5
1
Element (Jan,Marian)=7 oznacza, że ekspert z dużą preferencją
kwalifikuje Jana w stosunku do Mariana do zbioru “popełniający
błędy”, innymi słowy Jan w dużo większym stopniu należy do zbioru
“popełniający błędy”.
Metoda średniej geometrycznej:
α
i
ij
j
n
n
r
i
n
=
=
=
∏
1
1
1
,
, ,
! .
Otrzymujemy:
α
α
α
α
Jan
Marek
Jerzy
Marian
=
=
=
=
3 20
150
0 76
0 27
. ,
. ,
. ,
.
,
co po normalizacji da nam zbiór rozmyty o funkcji przynależności:
µ
A
=
+
+
+
1
0 47
0 24
0 08
/
.
/
.
/
. /
Jan
Marek
Jerzy
Marian .
Metody ad-hoc polegają na określeniu przez eksperta wartości
modalnych funkcji przynależności oraz jej nośnika. Ponieważ w tym
przypadku zaniedbywany jest kształt funkcji L i R przyjmuje się
wówczas najczęściej, że są one liniowe..
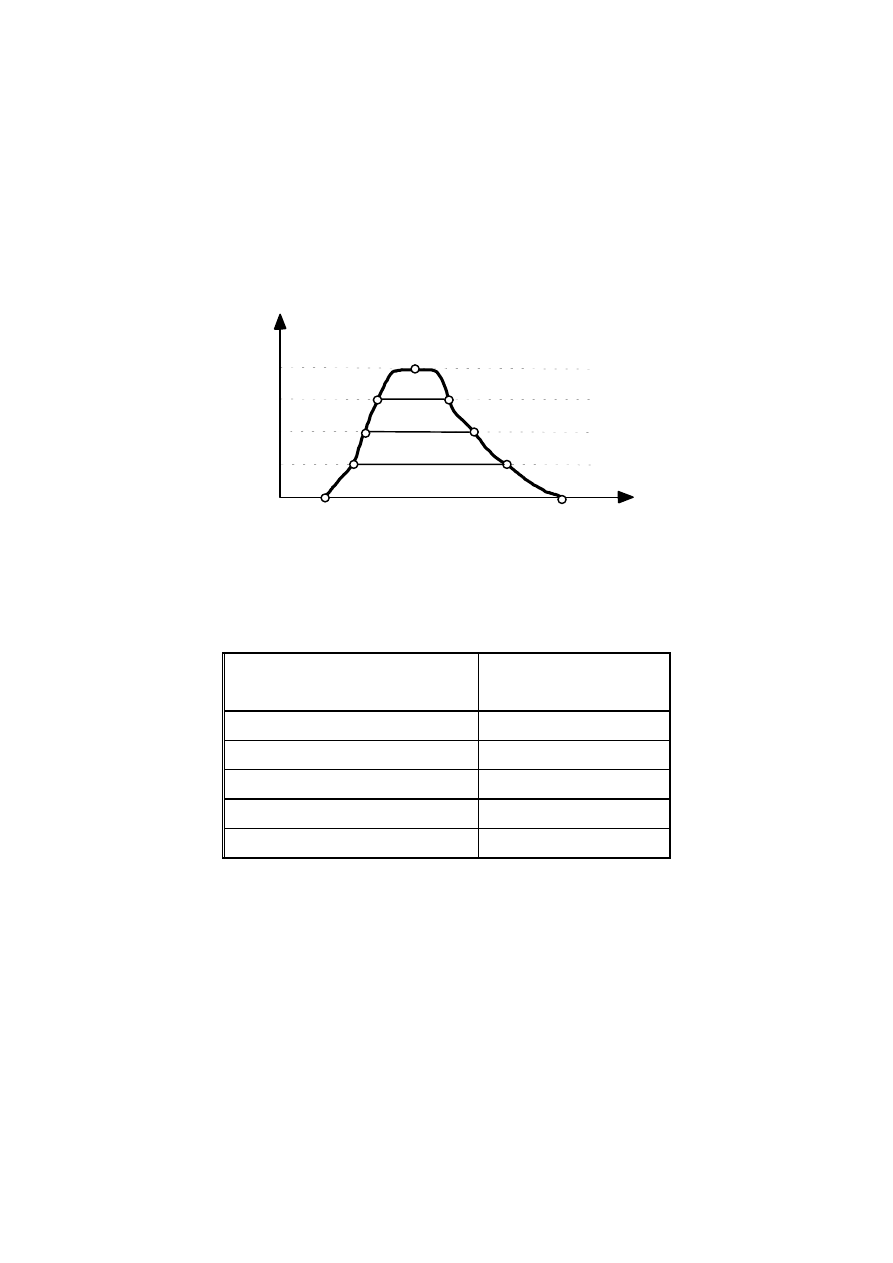
Dubois i Prade (1988) proponują identyfikację funkcji
przynależnośći w oparciu o
α
- przekroje (Rys. 14.), stosując 5-7
stopniową skalę lingwistyczną (Tablica 2.2.).
X
0
A
B
C
D
E
µ
F
(x)
Rysunek 14. Poziomy przynależności
Tablica 2. Pięiostopniowa skala lingwistyczna
Stopień zgodności
Poziom
przynależnośći
A Zupełna zgodność
1
B Dobra zgodność
0.75
C Zgodność
0.5
D Słaba zgodność
0.25
E Niezgodność
0
Przykład. Załóżmy, że ekspert ma oszacować rozmyte
prawdopodobieńśtwo awarii elementu systemu i jego zadaniem
najbardziej możliwa wartość prawdopodobieństwa wynosi
p
m
oraz
zawiera się ono w przedziale
[
]
p p
l
u
,
. Wówczas rozmyte
prawdopodobieństwo awarii wyniesie
(
)
~
,
,
p
p p p
l
m
u
=
.
Przykład.
ZAŁOŻENIA:
•
na podstawie oceny grupy osób mamy uzyskać zbiór rozmyty
“wysoka temperatura”,
•
wszystkie osoby są zgodne, że wysoka temperatura zawiera się w
przedziale
[
]
T
=
50 100
,
°
C
•
T jest zdyskretyzowane na n podprzedziałów
T i
n
i
,
, , .
=
1 !
,
•
każdą osobę poproszono o wyrażenie swojej subiektywnej oceny
jaka temperatura ze zbioru T jest dla niego wysoka
•
przy odpowiednio dużej liczbie odpowiedzi (danych) jesteśmy w
stanie policzyć prawdopodobieństwa
( )
p T i
n
i
,
, ,
=
1 !
.
•
wynikiem eksperymentu jest:
“wysoka temperatura” =
[
]
t,100
,
co można zapisać:
( )
[
]
∀ ∈
=
t T
t
t
i
i
Γ
,100
.
•
podstawowe przyporządkowanie jest zdefiniowane następująco:
[
]
(
)
( )
m t
P T
i
i
,100
=
z zagnieżdżonymi elementami fokalnymi.
Wówczas otrzymujemy:
( )
{ }
( )
( )
∀
=
=
≤
∑
t
t
Pl t
P T
w
i
t t
i
µ
ysoka temperatura
.
Uwaga. Funkcja przynależności zbioru rozmytego “wysoka
temperatura” jest dystrybuantą miary prawdopodobieństwa otrzymanej
na podstawie eksperymentu statystycznego.

Przykład.
Załóżmy, że grupa q ekspertów nie jest zgodna co do oceny
prawdopodobieństwa wystąpienia awarii elementu systemu i każdy z
ekspertów jest w stanie podać przedział liczbowy w którym to
prawdopodobieństwo się znajduje:
[
]
a b
k
q
k
k
,
,
, ,
=
1 !
. Ponadto
załóżmy, że podane przedziały liczbowe na siebie nachodzą:
[ ]
[
]
∃
=
≠ ∅
=
a b
a b
k
k
k
q
,
,
1
#
Przyjmijmy następujące oznaczenie:
[ ]
[
]
A B
a b
k
k
k
q
,
,
=
=
1
"
.
Zdefiniujmy
{
}
I
n
i
; , ,
1 !
zagnieżdżonych przedziałów liczbowych:
[ ]
[ ]
a b
I
I
I
A B
n
,
,
⊆
⊂
⊂ ⊂
=
1
2
$
Odpowiedni zbiór rozmyty F można policzyć następująco:
( )
{ }
( )
( )
{ }
( )
µ
F
x
Pl x
m I
x
i
x I
i
=
=
=
∈
∑
Π
,
co można zapisać (Dubois and Prade 1986, 1988):
( )
µ
F
x
=
0 jeśli x I
n
∉
,
( )
( )
µ
F
x
m I
j
j
n
=
=
∑
1
jeśli x
I
I
i
i
i
∈
≥
−
\
,
1
2 ,
( )
µ
F
x
=
1 jeśli x I
∈
1
,
gdzie:
I
I
i
i
\
−
1
należy rozumieć jako różnicę zbiorów
I
i
oraz
I
i
−
1
.
Uwagi. Warto podkreślić, że jeśli nie potrafimy zanaleźć
odpowiedniego odwzorowania
Γ
tak aby uzyskać zagnieżdżone
elementy fokalne, to w przypadku zastosowania teorii możliwości
uzyskamy nieznormalizowany zbiór rozmyty tzn.:
( )
{
}
sup
.
x
x
µ
F
<
1
Ponieważ teoria możliwości zakłada normalizację pozostaje nam
podejście Shafer’a i operowanie na miarach pewności
i wiarygodności.
Wyszukiwarka
Podobne podstrony:
Badania operacyjne wyklad 2 id Nieznany
badania operacyjne 3 id 76767 Nieznany (2)
Badania operacyjne, zadanie id Nieznany (2)
badania operacyjne, fuzzy intro
badania operacyjne, or intro
badania operacyjne 1 id 76766 Nieznany
Badania operacyjne Zadanie tran Nieznany (2)
badania operacyjne 9 id 76768 Nieznany
badania operacyjne or decision Nieznany (2)
Badania operacyjne id 76520 Nieznany (2)
Badania operacyjne wyklad 2 id Nieznany
badania operacyjne 3 id 76767 Nieznany (2)
Badania operacyjne, zadanie id Nieznany (2)
Badania operacyjne w logistyce Nieznany
badania operacyjne poss1 id 630 Nieznany (2)
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
24 Badanie czwornikow id 30562 Nieznany
więcej podobnych podstron