LABORATORIUM – AUTOMATYKA i ROBOTYKA
Dobór optymalnych nastaw regulatora PID metodą Zieglera-Nicholsa
1.
Wstęp
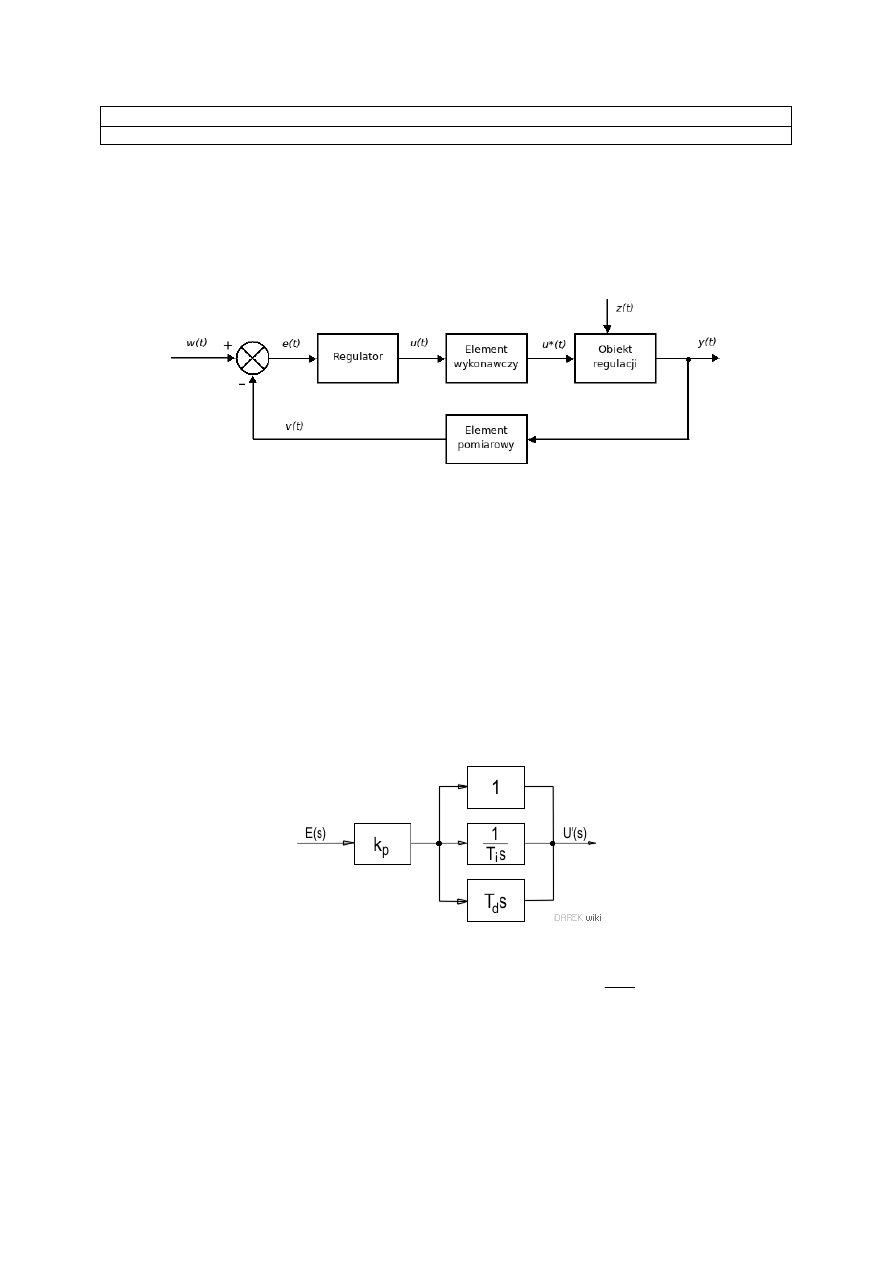
Na Rysunku 1 pokazano podstawową strukturę układu regulacji. Celem regulacji jest uzyskanie przez wielkość
regulowaną y(t) wartości zadanej w(t), co sprowadza się do sprowadzenia błędu (uchybu) regulacji do zera. Układ regulacji
jest układem dynamicznym, tzn. osiąganie celu regulacji następuje w trakcie procesu regulacji zachodzącego w określonym
(skończonym) czasie.
Rysunek 1. Ogólny schemat układu regulacji automatycznej
W projektowaniu układów regulacji istotne znaczenie ma dobór właściwego regulatora i jego parametrów. Dobór
regulatora opiera się zwykle na minimalizacji pewnego wskaźnika jakości regulacji. Transmitancję regulatora wyznacza się
na podstawie przyjętego kryterium, przy znajomości właściwości dynamicznych pozostałych elementów w układzie. W
praktyce właściwości dynamiczne obiektu nie są zwykle znane, a ich wyznaczenie eksperymentalne jest możliwe jedynie z
ograniczoną dokładnością. W takiej sytuacji najczęściej stosuje się regulatory uniwersalne, wśród których najszersze
zastosowanie ma regulator PID.
Regulator PID przetwarza sygnał wejściowy E(t) według trzech równolegle realizowanych operacji dynamicznych:
wzmocnienia proporcjonalnego ze współczynnikiem k
p
,
różniczkowania ze stałą czasową T
d
,
całkowania ze stałą czasową T
i
.
Rysunek 2. Schemat struktury regulatora PID
Transmitancja idealnego regulatora PID ma postać:
s
T
T
s
k
s
G
i
d
p
PID
1
1
.
Prawidłowe określenie współczynników regulatora PID (k
p
, T
d
, T
i
) wymaga znajomości (przynajmniej przybliżonej)
właściwości dynamicznych toru złożonego z obiektu regulacji, elementu wykonawczego i układu pomiarowego. Istnieją
również metody eksperymentalnego wyznaczenia nastaw regulatora PID po jego zainstalowaniu w zamkniętym układzie
regulacji, bez konieczności wyznaczania parametrów obiektu. Metoda pokazana w ćwiczeniu (opracowana przez Zieglera i
Nicholsa) prowadzi do uzyskania przebiegu aperiodycznego z przeregulowaniem 20% i minimalnym czasem regulacji.
2.
Przebieg ćwiczenia.
2.1.
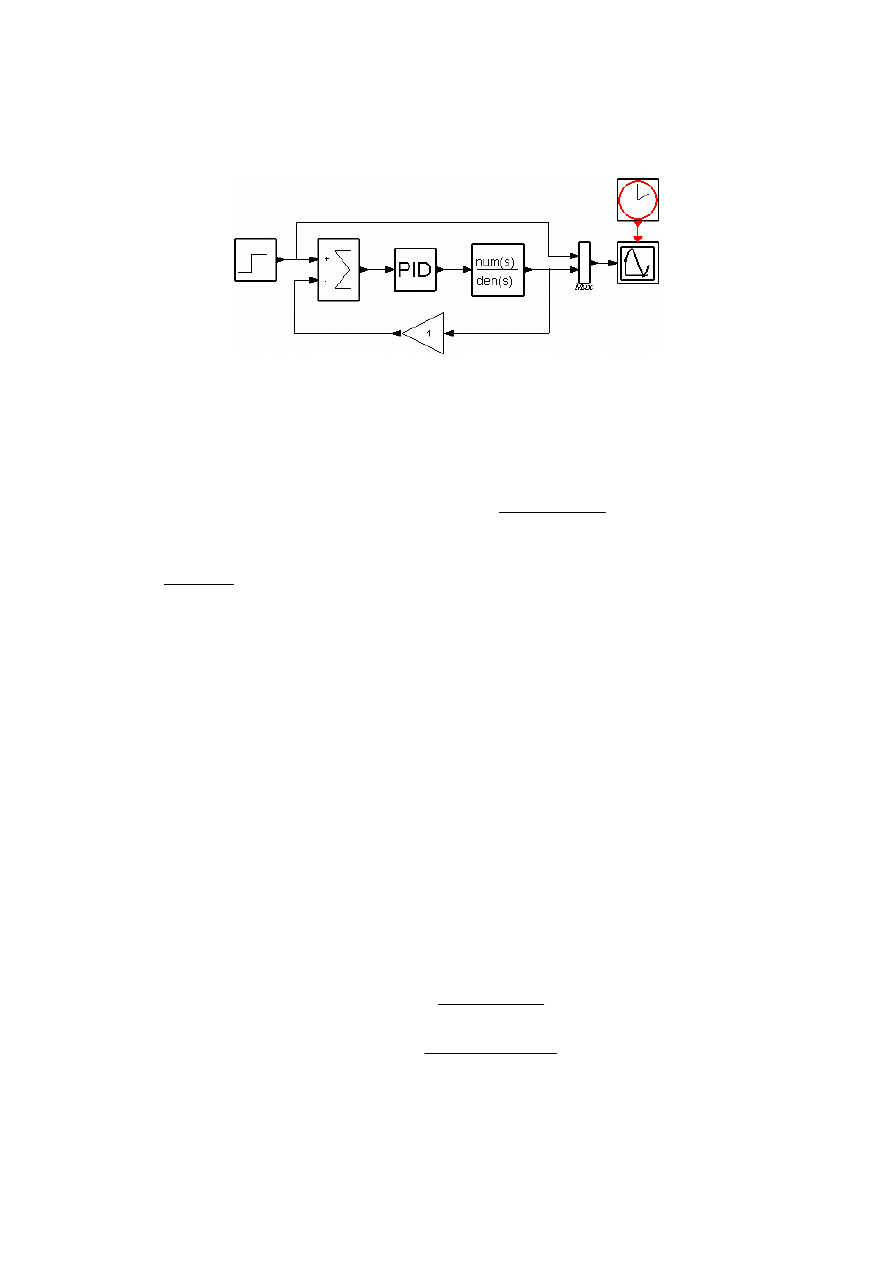
Stworzyć w module Scicos programu Scilab (Applications->Scicos) model układu regulacji z Rysunku 3.
Rysunek 3. Model układu automatycznej regulacji z regulatorem PID
2.2.
Skonfigurować bloki modelu:
Step function generator: Step time=0, Final value=1. Czyli na wejście układu podajemy skok jednostkowy.
Continous transfer function - tutaj określamy własności obiektu regulacji, w postaci jego transmitancji. Pierwszym
obiektem regulacji niech będzie obiekt o transmitancji:
1
2
2
5
,
2
2
3
s
s
s
s
G
.
PID regulator - tutaj określamy własności regulatora PID: Proportional=1 (wzmocnienie proporcjonalne), Integral=0
(
odwrotność stałej czasowej członu całkującego regulatora), Derivation=0 (stała czasowa członu różniczkującego
regulatora),
Single display scope: Refresh period=50 (wzmocnienie proporcjonalne), w trakcie ćwiczenia należy odpowiednio
modyfikować parametry Ymin i Ymax (określające maksimum i minimum osi y wykresów), tak by uzyskiwane
wykresy były możliwie dokładne i czytelne.
2.3.
Ustawić odpowiednie parametry symulacji (Simulate->Setup): Final integration time=50, pozostałe bez zmian.
2.4.
Zgodnie z zasadami podanymi w punkcie 3 instrukcji wyznaczyć optymalne nastawy regulatora. Uzyskane wartości
umieścić w protokole.
2.5.
Ustawić nowe parametry wartości zadanej sygnału (ustawiane w bloku Step function generator). Nich przyjmuje
ona na początku wartość 5 i po 25 sekundach zmienia się na -5.
2.6.
Sprawdzić i naszkicować w protokole odpowiedź układu na takie pobudzenie w czterech przypadkach:
układ bez regulacji (blok PID regulator: Proportional=1, Integral=0, Derivation=0, blok Gain: Gain=0),
układ z regulatorami optymalnymi typu P, PI i PID (blok PID regulator: wartości obliczone w punkcie 2.4, blok Gain:
Gain=1).
2.7.
W ten sam sposób dokonać doboru nastaw optymalnych regulatora i wypełnić protokół dla obiektów o
transmitancjach:
2.7.1.
1
2
3
1
2
3
s
s
s
s
G
,
2.7.2.
1
2
3
5
,
0
2
3
4
s
s
s
s
s
G
.
2.8.
Mile widziane jest zamieszczenie w protokole własnych wniosków i przemyśleń.
3.
Metoda Zieglera-Nicholsa
Sposób postępowania jest następujący:
1.
nastawić regulator na działanie czysto proporcjonalne (Integral=0, Derivation=0),
2.
eksperymentalnie wyznaczyć wzmocnienie krytyczne k
kr
regulatora (Proportional) dla którego na wyjściu
układu występują oscylacje niegasnące (o stałej amplitudzie),
3.
zmierzyć okres tych oscylacji T
osc
,
4.
znając wielkości T
osc
i k
kr
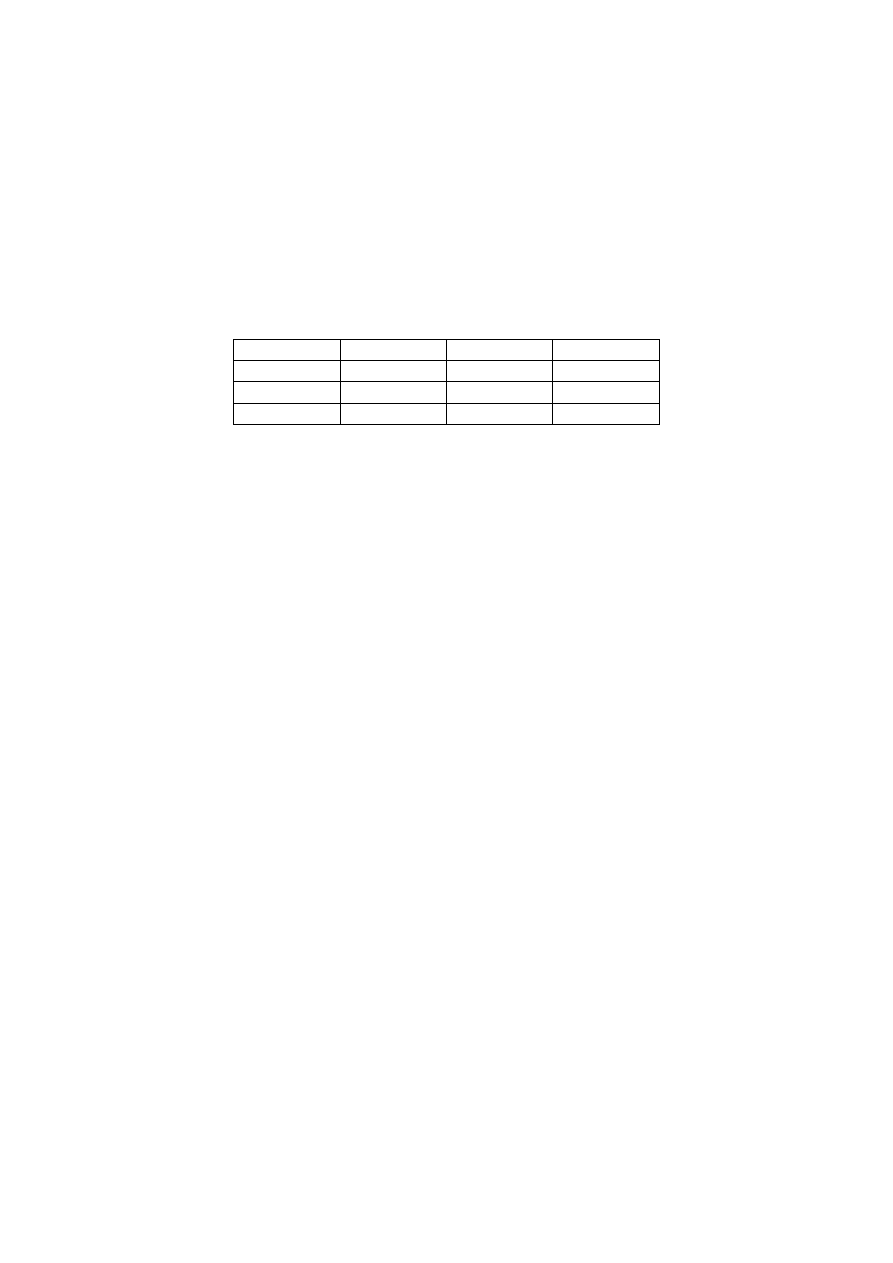
nastawy optymalne wg Zieglera i Nicholsa dobiera się wg Tabeli 1.
Tabela 1. Optymalne nastawy regulatora PID wg metody Zieglera-Nicholsa
Typ regulatora
k
p
T
i
T
d
P
0,5k
kr
-
-
PI
0,45k
kr
0,85T
osc
-
PID
0,6k
kr
0,5T
osc
0,12T
osc
4.
Literatura
1) Frohr F., Orttenburger F., „Wprowadzenie do elektronicznej techniki regulacji”, Wydawnictwa Naukowo-Techniczne,
Warszawa 1977
2) Kiczkowiak T., Ociepa Z., Tarnowski W., Wachowicz E., Wachowicz M., „Laboratorium z podstaw automatyki”,
Wydawnictwo Uczelniane Politechniki Koszalińskiej, Koszalin 1999
3) Pochopień B., „Automatyka przemysłowa dla elektroników”, Wydawnictwa Szkolne i Pedagogiczne , Warszawa 1976
4) zbiorowa pod red. Hejmo W., „Laboratorium podstaw automatyki”, Wydawnictwa Politechniki Krakowskiej, Kraków 1988
5) zbiorowa pod red. Zakrzewski J., „Laboratorium podstaw automatyki”, Wydawnictwo Politechniki Śląskiej, Gliwice 2001
Opracowanie ćwiczenia: Seweryn Lipiński
Wyszukiwarka
Podobne podstrony:
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Badanie układu sterowania z regulatorem PID
Regulator PID Cool
Regulator PID (2)
DOBÓR NASTAW REGULATORA PID
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
Regulator Pid
H Juszka i in Sterowanie logiczne z regulacja PID
PID-B, regulatory PID:
Ćw 6 Regulacja PID
Dobór parametrów regulatora PID – symulacja komputerowa
FAQ Konfiguracja regulatora PID
UKŁADY REGULACJI, układ regulacji PID
Regulator PID
więcej podobnych podstron