
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
i NAUKI
Elżbieta Murlikiewicz
Dobieranie silników elektrycznych w układach
napędowych 311[08].Z4.01
Poradnik dla ucznia
Wydawca
Instytut technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2005

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Maria Pierzchała
mgr inż. Jerzy Chiciński
Opracowanie redakcyjne:
mgr inż. Katarzyna Maćkowska
Konsultacja:
dr Bożena Zając
Korekta:
mgr inż. Jarosław Sitek
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[08].Z4.01
„Dobieranie silników elektrycznych w układach napędowych” zawartego w modułowym
programie nauczania dla zawodu technik elektryk 311[08]
Wydawca
Instytut technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2005

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
4
3. Cele kształcenia
5
4. Materiał nauczania
6
4.1. Charakterystyka podzespołów układu napędowego
6
4.1.1. Materiał nauczania
6
4.1.1. Pytania sprawdzające
10
4.1.2. Ćwiczenia
10
4.1.3. Sprawdzian postępów
11
4.2. Dynamika układu napędowego
12
4.2.1. Materiał nauczania
12
4.2.2. Pytania sprawdzające
17
4.2.3. Ćwiczenia
17
4.2.4. Sprawdzian postępów
20
4.3. Charakterystyka ogólnych wytycznych doboru i nagrzewania silników
21
4.3.1. Materiał nauczania
21
4.3.2. Pytania sprawdzające
26
4.3.3. Ćwiczenia
26
4.3.4. Sprawdzian postępów
27
4.4. Dobór mocy silników elektrycznych do wymagań układu napędowego
28
4.4.1. Materiał nauczania
28
4.4.2. Pytania sprawdzające
35
4.4.3. Ćwiczenia
36
4.4.4. Sprawdzian postępów
27
5.
Sprawdzian osiągnięć
39
6.
Literatura .
45

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy i kształtowaniu umiejętności
z zakresu dobierania silników elektrycznych w układach napędowych.
W poradniku zamieszczono:
– wymagania wstępne,
– cele kształcenia,
– materiał nauczania,
– pytania sprawdzające,
– ćwiczenia,
– sprawdziany postępów,
– sprawdzian osiągnięć.
Szczególną uwagę zwróć na :
– podstawowe wielkości opisujące układ napędowy i zależności między nimi,
– wpływ strat mocy występujących podczas pracy silnika na nagrzewanie się maszyny,
– zależność między konstrukcją a rodzajem pracy silnika,
– wpływ rodzaju obudowy i wykonania na możliwości zastosowania silnika w różnych
warunkach pracy.
Właściwy dobór silnika ma istotny wpływ na trwałość i niezawodność pracy układu
napędowego, co ma ścisły związek kosztami eksploatacyjnymi układu.
Najlepsze efekty pracy osiągniesz starając się zrozumieć zagadnienia, które przedstawia
ten poradnik. Analizując je, zwróć uwagę na powiązanie tych zagadnień z wiadomościami
i umiejętnościami ukształtowanymi na poprzednich jednostkach modułowych i wykorzystaj
to do lepszego zrozumienia zagadnień z zakresu doboru silników elektrycznych. W ten
sposób utrwalisz wcześniej zdobyte wiadomości, poszerzysz je o nowe i udoskonalisz swoje
umiejętności.
Pojawiający się w tekście i w opisie rysunków zapis [1], [2] itp. wskazuje pozycję literatury
z wykazu, z której pochodzi fragment tekstu lub rysunek.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej „Dobieranie silników
elektrycznych w układach napędowych” powinieneś umieć:
– wykonywać działania na wielomianach,
– rysować przebieg funkcji na podstawie jej zapisu arytmetycznego,
– analizować przebieg funkcji liniowej i kwadratowej,
– opisywać właściwości funkcji na podstawie jej przebiegu,
– klasyfikować silniki elektryczne i opisywać ich budowę,
– wymienić i zdefiniować wielkości umieszczane na tabliczce znamionowej,
– rysować charakterystyki i analizować własności silników na podstawie charakterystyk,
– korzystać z katalogów maszyn elektrycznych,
– rozpoznawać rodzaj silnika na podstawie budowy i tabliczki znamionowej.

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
– wyjaśnić strukturę elektrycznego układu napędowego,
– sklasyfikować elektryczne układy napędowe,
– zdefiniować podstawowe wielkości opisujące układ napędowy,
– sporządzić i zanalizować charakterystyki mechaniczne silników elektrycznych i maszyn
roboczych,
– obliczyć moment oporowy i moment bezwładności maszyny roboczej sprowadzony do
prędkości wału silnika,
– scharakteryzować stany ustalone i przejściowe w układzie napędowym,
– rozróżnić i scharakteryzować rodzaje pracy silników elektrycznych,
– rozróżnić rodzaje budowy i odpowiadające im stopnie ochrony oraz formy wykonania
silników,
– dobrać silnik elektryczny do maszyny roboczej z uwzględnieniem warunków pracy,
– posłużyć się dokumentacją techniczną, normami i katalogami silników elektrycznych.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
4. MATERIAŁ NAUCZANIA
4.1. Charakterystyka podzespołów układu napędowego
4.1.1. Materiał nauczania
A. Układ napędowy i jego części składowe
Pod pojęciem napędu rozumiemy doprowadzenie do maszyny roboczej (urządzenia)
energii mechanicznej warunkującej wykonanie przez maszynę określonej pracy.
Układem napędowym nazywamy zespół aparatów i urządzeń pracujących na zasadzie
wykorzystania energii, których zadaniem jest wprawienie w ruch maszyny roboczej.
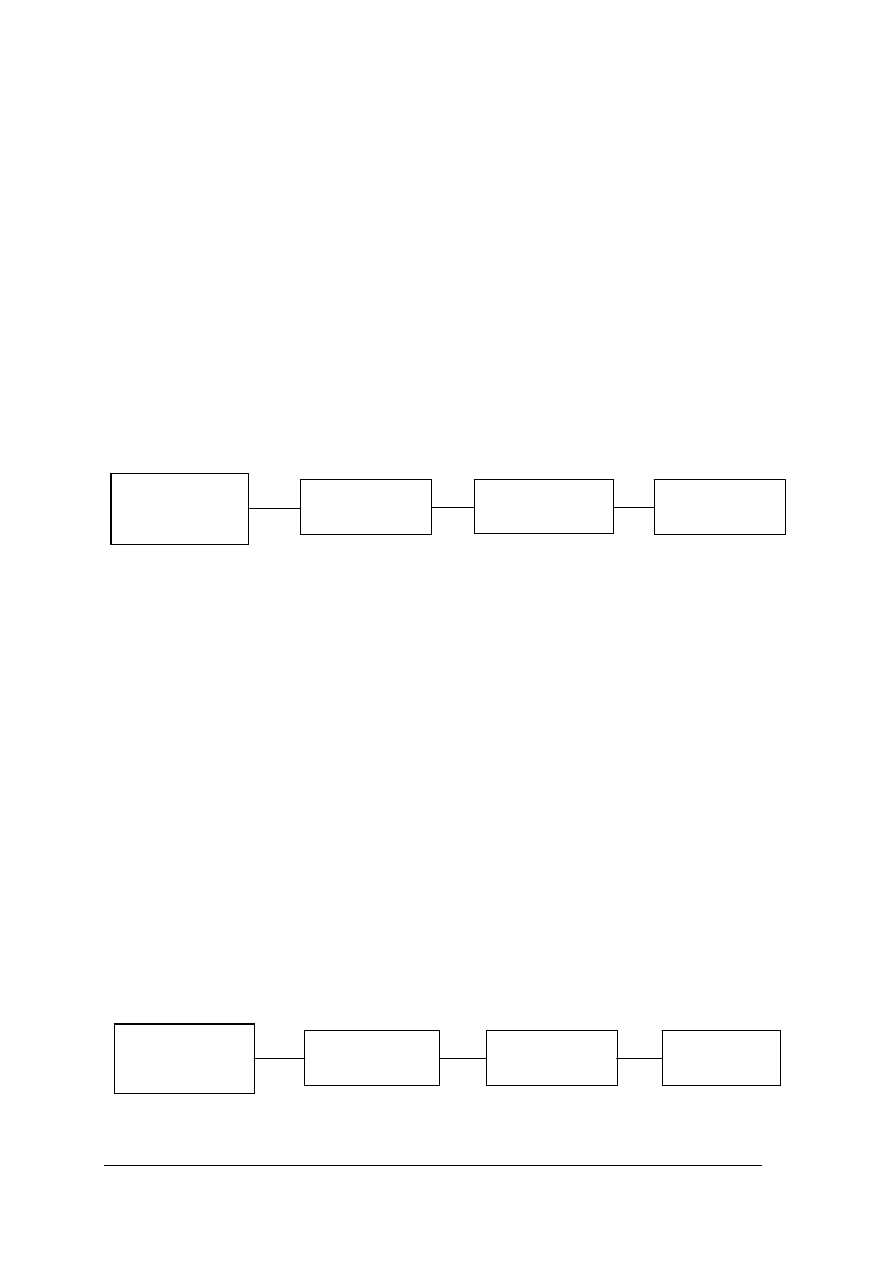
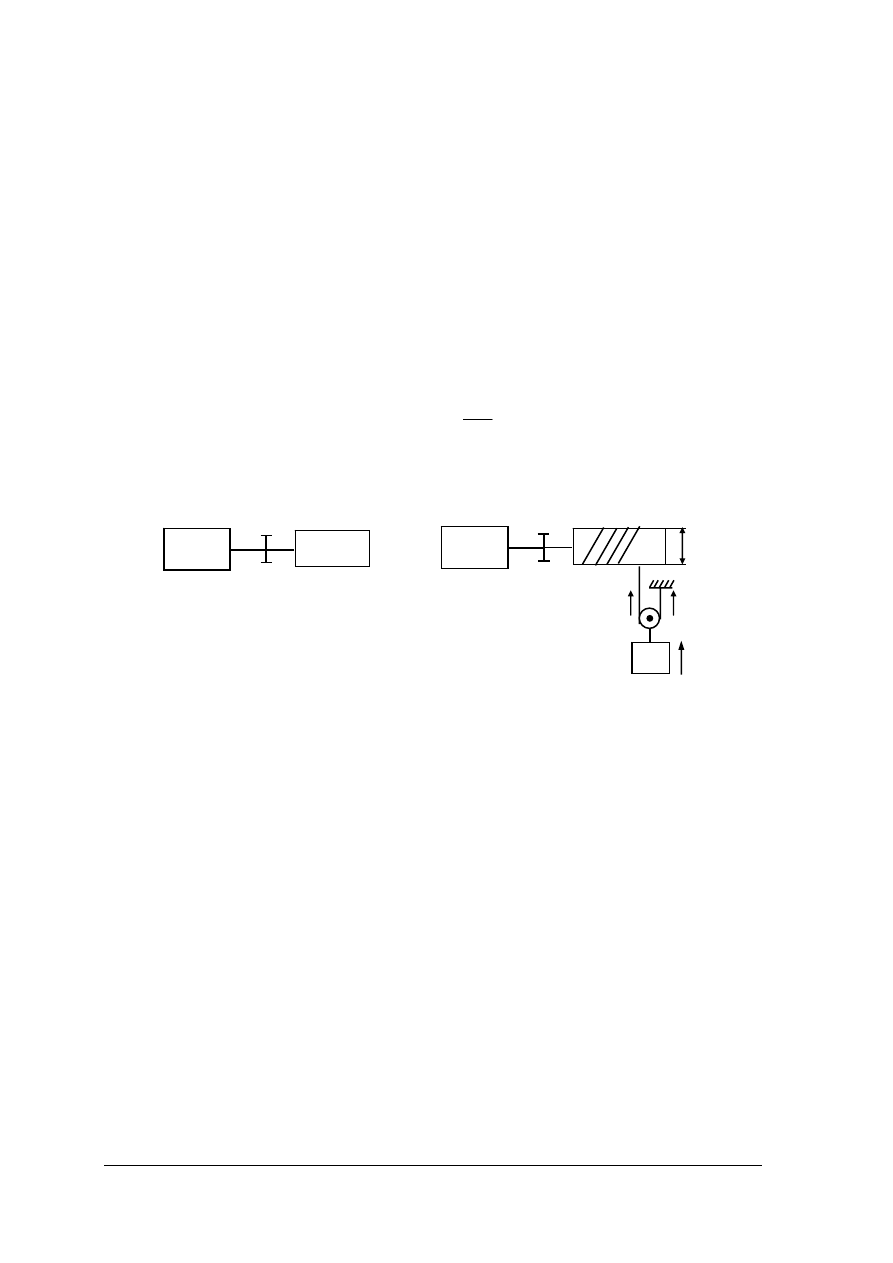
Najprostszy układ napędowy (rys.1) składa się z urządzenia napędzającego, urządzenia
sprzęgającego i urządzania napędzanego (maszyny roboczej).
Rys. 1. Schemat blokowy najprostszego układu napędowego
W zależności od zakresu obsługi układu napędowego napęd dzielimy na:
– sterowany ręcznie – wszystkie czynności związane z pracą układu wykonywane są przez
obsługę (człowieka) (rys.2) ,
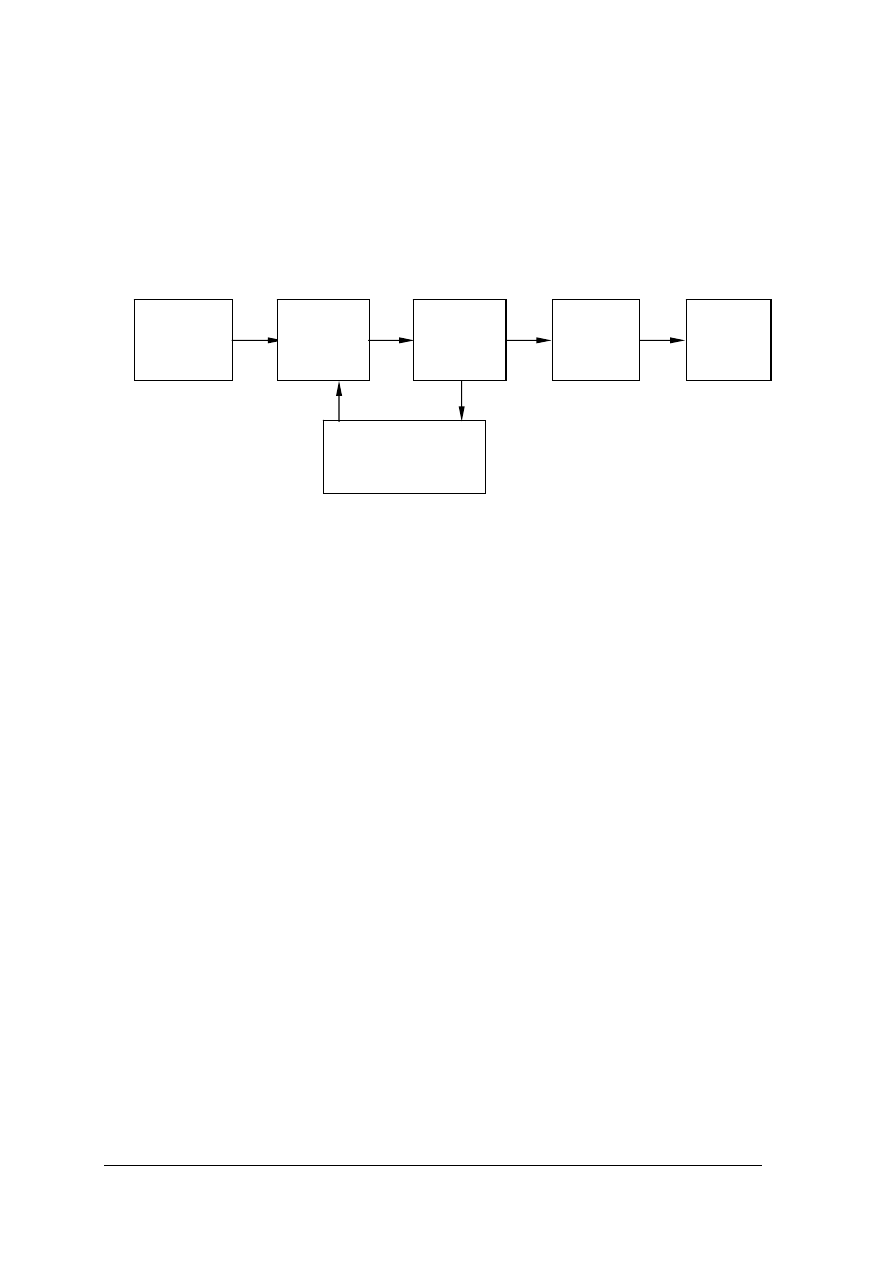
– półautomatyczny – część czynności manewrowych wykonywana jest przez obsługę,
a część przebiega samoczynnie (rys.3) ,
– automatyczny – odpowiednia aparatura zastępuje całkowicie człowieka przy obsłudze
maszyny roboczej (rys.4) .
W zależności od postaci (rodzaju) energii dostarczanej do układu napędowego w celu
wykonania określonej pracy przez maszynę roboczą możemy wyróżnić następujące rodzaje
napędów:
– wodny,
– wiatrowy,
– spalinowy,
– hydrauliczny,
– elektryczny.
Elektrycznym układem napędowym nazywamy zespół aparatów i urządzeń elektrycznych
pracujących na zasadzie wykorzystania energii elektrycznej, służących do wprawienia w ruch
maszyny roboczej.
Rys. 2. Schemat blokowy najprostszego elektrycznego układu napędowego
SILNIK
ELEKTRYCZNY
URZĄDZENIE
SPRZĘGAJĄCE
URZĄDZENIE
NAPĘDZANE
ŹRÓDŁO
ENERGII
ELEKTRYCZNEJ
URZĄDZENIE
NAPĘDZAJĄCE
URZĄDZENIE
NAPĘDZANE
ENERGIA
DOSTARCZANA
DO UKŁADU
URZĄDZENIE
SPRZĘGAJĄCE
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
Do zalet napędu elektrycznego należą między innymi:
– łatwość doprowadzenia energii elektrycznej,
– duża sprawność oraz cicha i bezpieczna praca silników elektrycznych,
– duża pewność ruchowa i łatwość wymiany silnika,
– łatwość dostosowania mocy silnika oraz prędkości do wymagań maszyny roboczej,
– szerokie możliwości automatyzacji przebiegu procesu rozruchu, regulacji prędkości
i hamowania,
– duża szybkość i dokładność działania, co zwiększa wydajność procesu technologicznego.
Rys. 3. Złożony układ napędowy
W zależności od sposoby rozprowadzania energii napęd elektryczny dzielimy na: [1]
– napęd elektryczny transmisyjny – jeden silnik elektryczny napędza za pośrednictwem
przekładni pasowych i pędni (transmisji) większość maszyn roboczych zainstalowanych
w zakładzie produkcyjnym,
– napęd elektryczny grupowy – jeden silnik elektryczny napędza pewną grupę maszyn
roboczych za pośrednictwem wydzielonych transmisji,
– napęd elektryczny jednostkowy – każda maszyna robocza jest napędzana przez odrębny
silnik napędowy,
– napęd elektryczny wielosilnikowy – poszczególne mechanizmy złożonej maszyny
roboczej są napędzane przez osobne silniki elektryczne.
W zależności od zastosowanego silnika elektrycznego napęd elektryczny dzielimy na:
– napęd prądu stałego – silnikiem napędowym jest silnik prądu stałego szeregowy,
bocznikowy lub obcowzbudny,
– napęd prądu przemiennego – silnikiem napędowym może być silnik indukcyjny,
synchroniczny lub komutatorowy prądu przemiennego.
W skład wyposażenia elektrycznego układu napędowego mogą wchodzić:
– łączniki,
– aparatura zabezpieczająca – bezpieczniki, wyzwalacze termiczne (czujniki termiczne),
– połączenia pędne – sprzęgła i przekładnie,
– dławiki wygładzające,
– rezystory regulacyjne i rozruchowe,
– aparatura kontrolno – pomiarowa: czujniki napięcia, prędkości i prądu, mierniki,
– urządzenia rozruchowe – rezystory, rozruszniki,
– urządzenia hamujące – zwalniaki, rezystory,
– układy regulacji napięcia.
SILNIK
ELEKTRY
CZNY
URZĄ-
DZENIE
SPRZĘ-
GAJĄCE
URZĄ-
DZENIE
NAPĘ-
DZANE
ŹRÓDŁO
ENERGII
ELEKTRY-
CZNEJ
APARA-
TURA
ŁACZE-
NIOWA
URZĄDZENIA
STERUJĄCE I
ZABEZPIECZAJĄCE
En.
el.
En.
el.
En.
mech.
En.
mech.
En.el. – energia
elektryczna
En.mech. – energia
mechaniczna
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Do niedawna szerokie zastosowanie miały elektryczne, elektromaszynowe układy
napędowe, w których następowało najczęściej trzystopniowe przetwarzanie energii: silnik
elektryczny, napędzający prądnicę elektryczną, będącą źródłem zasilania dla silnika
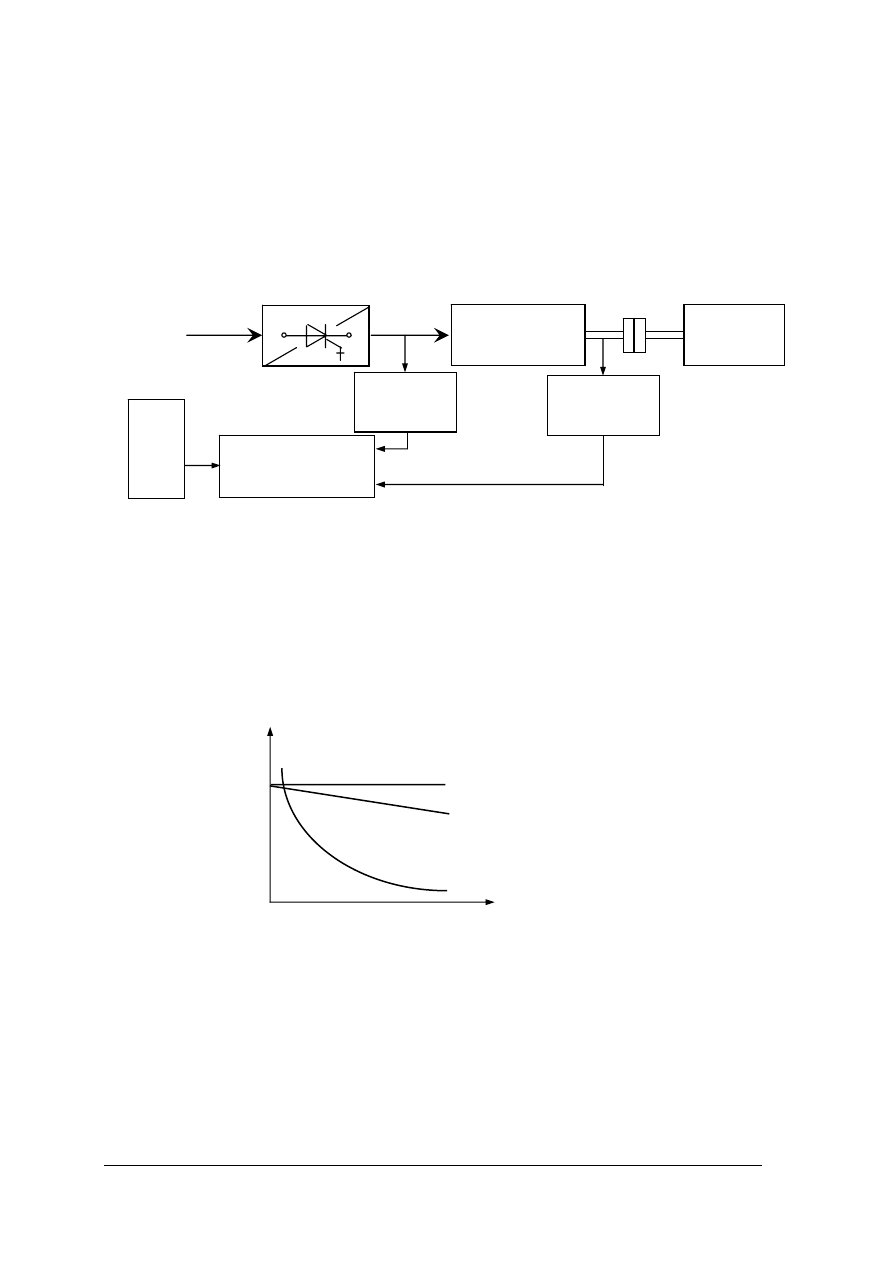
napędowego. Rozwój energoelektroniki sprawił, że w sposób mniej skomplikowany i z dużą
sprawnością możemy regulować parametrami napięcia zasilającego silnik napędowy. Układ
napędowy, w którym do sterowania przepływem energii między źródłem zasilania i silnikiem
napędowym oraz zmiany parametrów napięcia zasilającego silnika wykorzystano
półprzewodnikowe przyrządy mocy, nazywamy energoelektronicznym układem napędowym.
Rys. 4. Schemat blokowy energoelektronicznego układu napędowego
B. Charakterystyki mechaniczne silników elektrycznych
Charakterystyką mechaniczną silnika elektrycznego nazywamy zależność prędkości
wirowania wirnika (
ω
s
lub n
s
) od wytwarzanego momentu napędowego (M
s
). Charakterystyka
wyznaczona przy znamionowym napięciu twornika i bez dodatkowych elementów
włączonych w obwód twornika lub wzbudzenia nazywamy charakterystyką naturalną. Jeśli
wyznaczamy charakterystykę przy napięciu innym niż znamionowe lub włączymy rezystory
w obwód wirnika lub stojana to otrzymamy charakterystyką sztuczną.
Rys. 5. Przebieg trzech typowych charakterystyk mechanicznych silników elektrycznych
Rozróżniamy 3 rodzaje charakterystyk mechanicznych (rys. 5) wynikające z budowy
i rodzaju silników elektrycznych:
1 – synchroniczna – nazywana idealnie sztywną – mają ją silniki synchroniczne,
2 – bocznikowa – nazywana sztywną – mają ją silniki indukcyjne, bocznikowe prądu
stałego i komutatorowe bocznikowe prądu przemiennego,
3 – szeregowa – nazywana również miękką lub elastyczną – mają ją silniki szeregowe
prądu stałego oraz komutatorowe szeregowe prądu przemiennego.
SILNIK
ELEKTRYCZNY
MASZYNA
ROBOCZA
U
1
, I
1
, f
1
U
2
, I
2
, f
2
UKŁAD
POMIARU
PRĄDU
UKŁAD
POMIARU
PRĘDKOŚCI
ELEKTRONICZNY
UKŁAD
STERUJĄCY
ZADAJ
N
IK
PR
Ę
DK
O
Ś
CI
SYGNAŁ SPRZĘŻENIA
ZWROTNEGO
ω
s
M
s
2
1
3
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Sztywność charakterystyki określa zmienność prędkości, czyli względny spadek
prędkości wirowania wirnika przy zmianie obciążenia od biegu jałowego do obciążenia
znamionowego:
100
0
0
⋅
−
=
∆
n
n
n
n
N
lub
100
0
0
⋅
−
=
∆
ω
ω
ω
ω
N
gdzie: n
o
– prędkość obrotowa idealnego biegu jałowego, w obr
⋅min
-1
,
ω
o
– prędkość kątowa idealnego biegu jałowego, w rad
⋅s
-1
,
n
N
, (
ω
N
) – prędkość obrotowa (kątowa) znamionowa, w obr
⋅min
-1
(rad
⋅s
-1
).
Charakterystykę zaliczamy do sztywnej jeżeli
%
10
≤
∆n
C. Charakterystyki napędzanych urządzeń mechanicznych
Charakterystyką mechaniczną maszyny roboczej jest wykres zależności momentu
oporowego M
o
lub siły oporowej F
o
maszyny roboczej od jej prędkości obrotowej n
o
(kątowej
ω
o
) lub liniowej
υ
o
co możemy zapisać:
M
o
= f(n
o
) albo M
o
= f(
ω
o
) lub F
o
= f(
υ
o
)
Charakterystyki mechaniczne są charakterystykami statycznymi, czyli są wyznaczone dla
stanu ustalonego i nie uwzględniają momentów dynamicznych występujących w stanach
przejściowych.
Charakterystykę mechaniczną maszyny roboczej M
o
= f(
ω
o
) można opisać uproszczonym
wzorem [1]:
α
ω
ω
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
oN
o
oN
o
M
M
gdzie: M
oN
– moment oporowy maszyny roboczej przy prędkości znamionowej
ω
o
=
ω
oN
,
α
– wykładnik potęgi uwzględniający zależność zmian momentu oporowego M
o
od
prędkości
ω
o
.
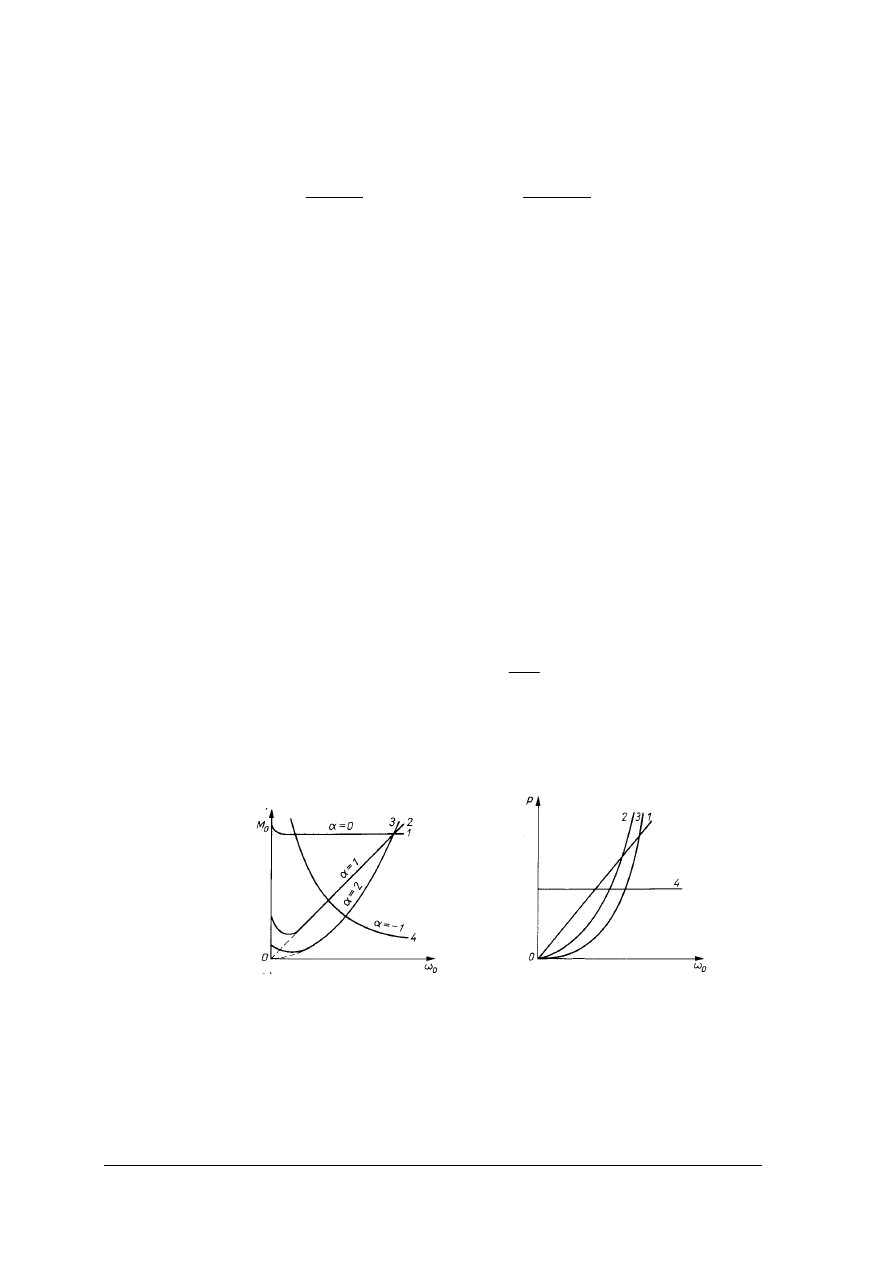
Rys. 6. Przebieg typowych charakterystyk mechanicznych maszyn roboczych: a) charakterystyka momentu
w funkcji prędkości M
o
= f(
ω
o
), b) charakterystyka mocy w funkcji prędkości P = f(
ω
o
) [1]
α
= -1 – charakterystyka hiperboliczna
α
= 0 – charakterystyka stałego momentu
α
= 1 – charakterystyka liniowa
α
= 2 – charakterystyka wentylatorowa
a)
b)

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Rozróżniamy dwa rodzaje momentów oporowych:
– moment oporowy bierny lub reakcyjny, skierowany przeciwnie do kierunku ruchu
(szlifowanie, przesuwanie poziome),
– moment oporowy czynny lub potencjalny, mający zwrot niezależny od kierunku ruchu
(podnoszenie i opuszczanie ładunku).
Przykłady zastosowań maszyn roboczych o różnych współczynnikach
α
[1]:
–
α
= -1 – maszyny do nawijania i przewijania taśm, wstęg, drutu, kabli, papieru, obróbki
drewna,
–
α
= 0 – mechanizmy podnoszenia, jazdy, obrotu, przenośniki, maszyny rotacyjne,
taśmociągi,
–
α
= 1 – walcarki, kalandry, urządzenia do gładzenia włókna w przemyśle
włókienniczym, prądnica obcowzbudna,
–
α = 2 – pompy wirowe, wentylatory, turbosprężarki, dmuchawy.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do zaplanowania
przebiegu ćwiczeń i ich wykonania.
1. Jaką strukturę ma najprostszy układ napędowy?
2. Jaką strukturę ma złożony układ napędowy?
3. Według jakich kryteriów możemy sklasyfikować układy napędowe?
4. Jakie rodzaje charakterystyk rozróżniamy?
5. Czy potrafisz przyporządkować rodzaj charakterystyki do typu silnika?
6. Czy potrafisz narysować trzy rodzaje charakterystyk mechanicznych silników
i zanalizować ich przebieg?
7. Czy potrafisz narysować charakterystyki mechaniczne maszyn roboczych o różnych
współczynnikach
α
?
8. Czy potrafisz zanalizować przebieg charakterystyk mechanicznych maszyn roboczych?
4.1.3. Ćwiczenia
Ćwiczenie 1
Porównaj charakterystyki mechaniczne silników elektrycznych i typowych maszyn
roboczych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) narysować układ współrzędnych M,
ω
,
2) narysować charakterystyki mechaniczne silników elektrycznych np. kolorem zielonym,
3) narysować charakterystyki mechaniczne maszyn roboczych w tym samym układzie
współrzędnych – zamieniając je na charakterystyki
ω
= f(M),

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
4) porównać przebieg charakterystyk i zanalizować zachowanie się silników i maszyn
roboczych przy wzroście momentu.
Wyposażenie stanowiska pracy:
− mazaki,
− arkusz papieru lub folia do grafoskopu.
Ćwiczenie 2
Na podstawie charakterystyk porównaj własności silnika, którego charakterystyka
opisana jest zależnością
ω
s
=
ω
o
– cM
s
z własnościami maszyny roboczej o charakterystyce
mechanicznej opisanej zależnością.
oN
o
oN
o
M
M
ω
ω
=
.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) narysować układ współrzędnych M,
ω,
2) wykreślić na jednym układzie współrzędnych (M,
ω
) charakterystykę silnika i maszyny
roboczej, przyjmując wybrane wartości momentu i prędkości kątowej,
3) porównać przebieg charakterystyk i zanalizować zachowanie się silnika i maszyny
roboczej przy wzroście momentu,
4) porównać przebieg charakterystyk i zastanowić się, jak zachowa się silnik napędzając
maszynę o takiej charakterystyce, jeśli z jakiejś przyczyny wzrośnie moment oporowy
maszyny roboczej.
Wyposażenie stanowiska pracy:
− mazaki,
− arkusz papieru lub folia do grafoskopu.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zdefiniować układ napędowy prosty i złożony?
2) wyjaśnić strukturę elektrycznego układu napędowego?
3) sklasyfikować elektryczne układy napędowe?
4) sporządzić charakterystyki mechaniczne silników elektrycznych?
5) zanalizować charakterystyki mechaniczne silników elektrycznych?
6) sporządzić charakterystyki mechaniczne maszyn roboczych?
7) zanalizować charakterystyki mechaniczne maszyn roboczych?
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
4.2. Dynamika układu napędowego
4.2.1. Materiał nauczania
A. Podstawowe wielkości opisujące układ napędowy
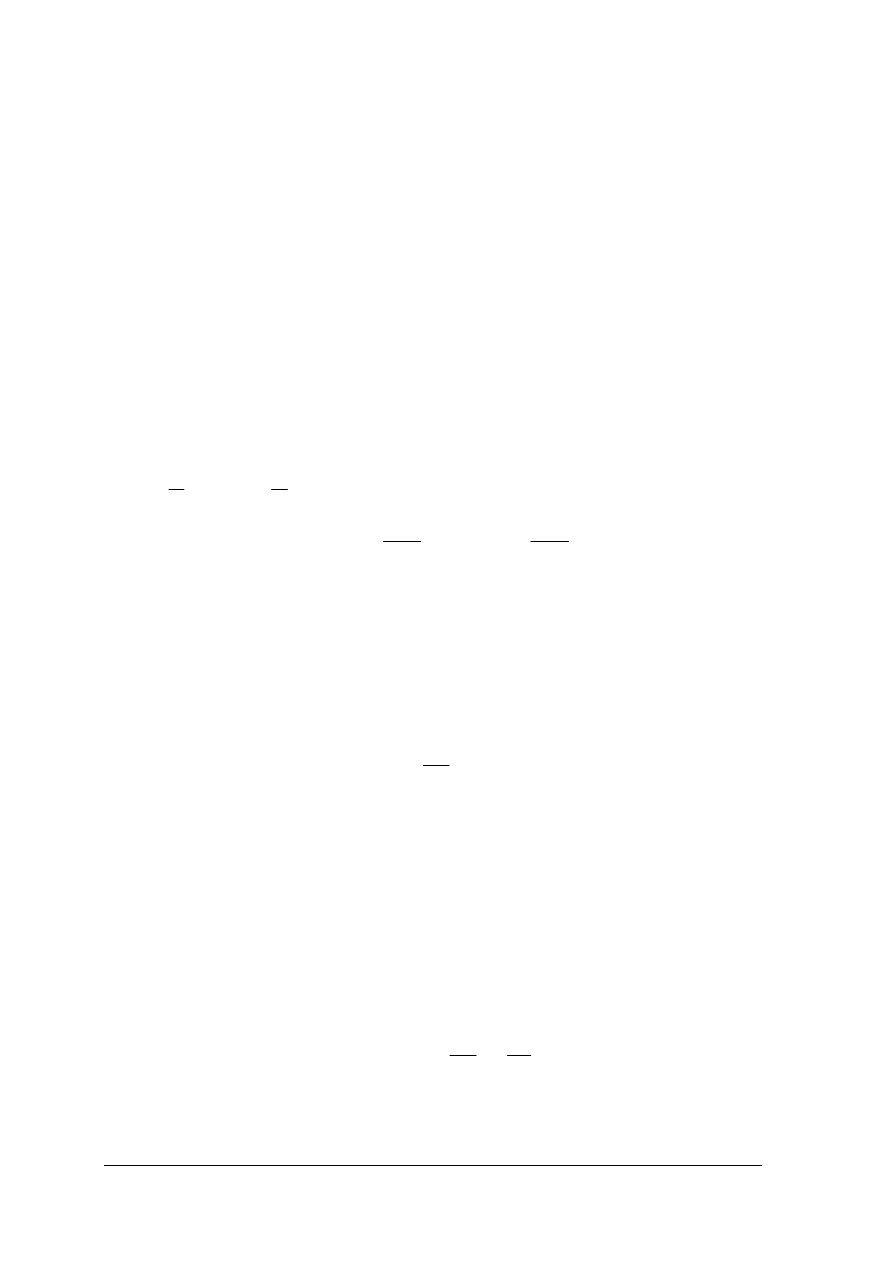
Moc mechaniczną P przenoszoną z silnika (S) do maszyny roboczej (MR) w ruchu
obrotowym (rys. 7a) opisuje zależność:
P
= M
s
ω
s
gdzie: M
s
– moment na wale silnika, w N
⋅m,
ω
s
– prędkość kątowa silnika, w rad
⋅s
-1
.
Związek między prędkością kątową
ω
i prędkością obrotową n opisuje zależność:
60
2 n
π
ω
=
gdzie: n – prędkość obrotowa w obr/min
lub
ω
= 2
πn
gdzie [n] = 1obr/s.
Rys. 7. Schematy kinematyczne układu napędowego przy bezpośrednim sprzężeniu maszyny roboczej
z silnikiem: a) praca wykonywana w ruchu obrotowym, b) praca wykonywana w ruchu postępowym
Maszyna robocza przeciwstawia napędzającemu ją silnikowi moment oporowy M
o
. Moc
P
pobierana przez maszynę roboczą w ruchu obrotowym:
P
= M
o
ω
o
gdzie:
ω
o
– prędkość kątowa maszyny roboczej, w rad/s,
M
o
– moment oporowy maszyny roboczej, w Nm.
Jeżeli występuje ruch postępowy (rys. 7b), to wówczas wartość zapotrzebowanej mocy
opisuje zależność:
P
= F
o
υ
o
gdzie: F
o
– siła oporowa urządzenia napędzanego, w N,
υ
o
– prędkość liniowa urządzenia napędzanego, w m/s.
Związek między prędkością w ruchu postępowym
υ
a prędkością kątową
ω
opisuje
zależność:
υ
o
=
ω
o
r
gdzie: r – promień wału urządzenia napędzanego, w m; r = 0,5 D.
F = 0,5G
S
MR
S
G
F = 0,5G
υ
o
D
MR
M
s
,
ω
s
M
o
,
ω
o
M
s
,
ω
s
a) b)
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
B. Moment bezwładności
Moment bezwładności J określa inercję ciała wirującego wokół osi i oblicza się go jako
sumę iloczynów mas elementarnych m
i
cząstek ciała i kwadratów odległości r
2
tych cząstek
od osi obrotu [1].
J
=
∑
=
⋅
k
i
i
i
r
m
1
2
gdzie: J – moment bezwładności ciała, w kg
⋅m
2
,
m
i
– masa cząsteczki, w kg,
r
i
– odległość cząsteczki od osi obrotu, w m.
W praktyce moment bezwładności bryły obrotowej wyznaczamy z zależności:
2
b
R
m
J
⋅
=
gdzie: m – masa ciała wirującego, w kg,
R
b
– promień bezwładności masy, w m.
W katalogach podaje się często moment zamachowy GD
2
N
⋅m
2
i wówczas podstawiając
m
=
g
G
oraz R
b
=
2
D
otrzymujemy
J
=
g
GD
4
2
lub
J
=
4
2
mD
gdzie: G – ciężar ciała wirującego, w N,
D
– średnica bezwładności, w m.
C. Dynamika układu napędowego
Momentowi obrotowemu silnika S, przedstawionemu w postaci charakterystyki
M
s
= f(ω
s
) maszyna robocza MR przeciwstawia moment oporowy – M
o
= f(ω
o
)
W stanie pracy ustalonej układ wiruje ze stałą prędkością kątową ω = const, czyli
przyśpieszenie układu jest równe zeru:
0
=
∆
∆
t
ω
, a więc moment napędowy i moment
oporowy (hamujący MR) równoważą się:
M
s
= M
o
Jeżeli powstaje nadwyżka momentu czyli M
s
≠ M
o
, to układ zaczyna pracować ze
zmienną prędkością i wówczas mamy do czynienia ze stanem przejściowym (nieustalonym)
w pracy układu napędowego. Zmianę prędkości układu napędowego powoduje nadwyżka
momentu, zwana momentem dynamicznym M
d
:
M
d
(ω) = M
s
(ω) – M
o
(ω)
W całym zakresie zmian prędkości moment dynamiczny może mieć stałą wartość
(M
d
= const) lub ulegać zmianie (M
d
= var). W stanach przejściowych na pracę układu ma
wpływ moment bezwładności J, który decyduje o wartości momentu dynamicznego, gdyż:
t
J
t
J
M
d
∆
∆
+
∆
∆
=
ω
ω
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
Moment bezwładności może mieć stałą wartość J
= const, czyli nie zależy od prędkości
wirowania, nie jest funkcją położenia lub może ulegać zmianie J = var.
Jeżeli J = const, to zależność na moment dynamiczny upraszcza się do postaci:
t
J
M
d
∆
∆
=
ω
Zachowanie układu napędowego w różnych stanach pracy opisuje równanie ruchu układu
napędowego w postaci ogólnej:
M
s
(ω)
_
M
o
(ω) = J
t
J
t
∆
∆
+
∆
∆
ω
ω
Jeżeli J = const, to równanie przyjmuje postać:
M
s
(ω)
_
M
o
(ω) = J
dt
d
ω
Jeżeli moment dynamiczny jest dodatni M
d
> 0, to układ przyśpiesza, natomiast jeśli
moment dynamiczny jest ujemny M
d
< 0, to układ zwalnia.
Układ napędowy osiąga stan ustalony przy takiej prędkości ω (lub n), przy której
charakterystyka mechaniczna silnika S przecina charakterystykę mechaniczną maszyny
roboczej MR.
Układ napędowy pracuje stabilnie przy ω = ω
ust
jeśli:
ω
ω
∆
∆
<
∆
∆
o
s
M
M
lub
o
s
M
M
∆
∆
>
∆
∆
ω
ω
Układ po wytrąceniu ze stanu ustalonego wróci do równowagi, jeżeli:
– po zwiększeniu prędkości (ω↑) moment oporowy jest większy od momentu
napędowego M
o
> M
s
,
– po zmniejszeniu prędkości (ω↓) moment oporowy jest mniejszy od momentu
napędowego M
o
< M
s
.
Układ napędowy pracuje niestabilnie, jeśli po wytrąceniu ze stanu ustalonego:
– układ przyśpiesza ponieważ po zwiększeniu prędkości (ω↑) moment napędowy jest
większy od momentu oporowego M
s
> M
o
,
– układ zwalnia aż do zatrzymania, ponieważ po zmniejszeniu prędkości (ω↓) moment
oporowy jest większy od momentu napędowego M
o
> M
s
.
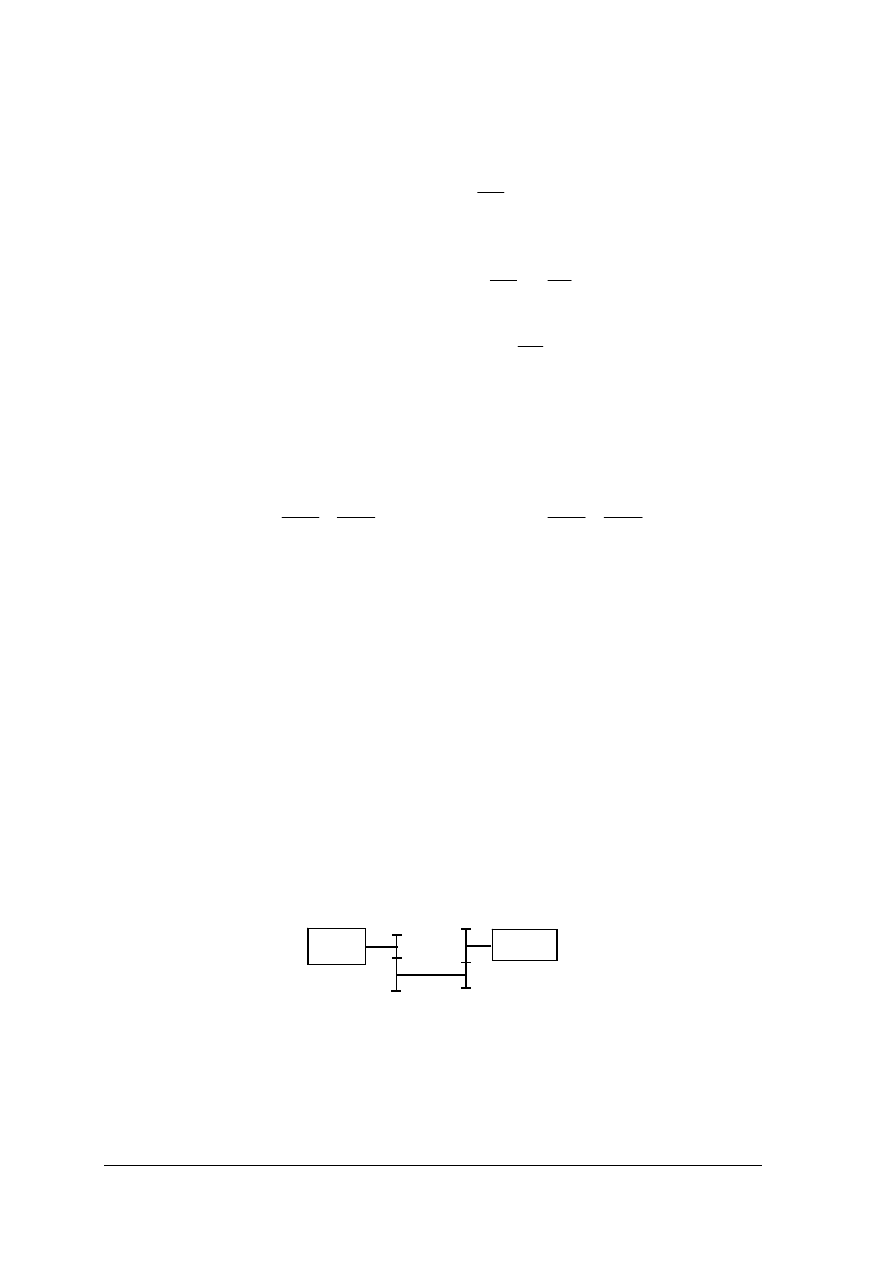
D. Sprowadzanie momentów i sił oporowych maszyn roboczych do prędkości wału
silnika
Zastępczy moment oporowy dla ruchu obrotowego
Rys. 8.
Schemat kinematyczny układu napędowego przy przetwarzania energii w ruchu obrotowym
z zastosowaniem przekładni p
Moc odniesiona do dowolnej części maszyny roboczej, tj. do momentu oporowego M
o
i prędkości kątowej
ω
o
musi być równa mocy na wale silnika, wynikającej z zastępczego
momentu oporowego M
z
i prędkości kątowej silnika
ω
s
.
S
MR
i
2
i
1
p
M
s,
ω
s
M
o
,
ω
o
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Przy przenoszeniu momentu bez strat:
M
o
ω
o
= M
z
ω
s
o
s
o
s
o
o
z
M
M
M
ω
ω
ω
ω
=
=
⇒
gdzie:
i
o
s
=
ω
ω
–
przełożenie przekładni p
stąd moment zastępczy
M
z
=
i
M
o
Jeżeli silnik napędza kilka maszyn roboczych, to moment zastępczy M
z
wynika z sumy
momentów oporowych M
o
wszystkich maszyn roboczych:
∑
=
=
n
l
l
ol
z
i
M
M
1
W rzeczywistości każda przekładnia charakteryzuje się pewnymi stratami czyli
η
p
< 1.
Przy przepływie energii od silnika do maszyny roboczej
zastępczy moment wytworzony
przez silnik musi być powiększony o straty w przekładni, co zapisujemy:
M
z
ω
s
η
p
= M
o
ω
o
⇒
p
s
o
o
z
M
M
η
ω
ω
=
p
o
z
i
M
M
η
=
Przy przepływie energii od maszyny roboczej do silnika (hamowanie, opuszczanie ładunku)
silnik musi dostarczyć energię zmniejszoną o energię strat w przekładni co zapisujemy:
M
z
ω
s
= M
o
ω
o
η
p
⇒
p
o
z
i
M
M
η
=
Przeprowadzone rozumowanie jest słuszne, gdy moment pochodzący od MR jest w stanie
pokonać opory samej przekładni.
Jeżeli zastosowano kilkustopniową przekładnię o znanych przełożeniach (i
1
, i
2
, i
3
,..., i
n
)
i znanych sprawnościach (
η
1
,
η
2
,
η
3
,...,
η
n
) to przełożenie i sprawność układu obliczamy
z zależności:
i
= i
1
i
2
i
3
⋅⋅⋅
i
n
oraz
η
p
=
η
1
η
2
η
3
⋅⋅⋅
η
n
Zastępczy moment oporowy dla ruchu postępowego (rys. 9)
Rys.9. Schemat kinematyczny układu napędowego przy przetwarzania energii w ruchu postępowym
z zastosowaniem przekładni p
S
G
MR
i
1
i
2
F = 0,5G
M
s
,
ω
s
p
F = 0,5G
υ
0
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Przy przenoszeniu momentu bez strat:
M
z
ω
s
= F
o
υ
o
⇒
s
o
o
z
F
M
ω
υ
=
Przy przenoszeniu momentu w układzie rzeczywistym, tzn. ze stratami, należy uwzględnić
sprawności
η
< 1.
Przy przepływie energii od silnika do maszyny roboczej
M
z
ω
s
η
p
= F
o
υ
o
⇒
p
s
o
o
z
F
M
η
ω
υ
=
Przy przepływie energii od maszyny roboczej do silnika:
M
z
ω
s
= F
o
υ
o
η
p
⇒
s
o
o
z
F
M
ω
υ
=
p
η
E. Sprowadzanie momentu bezwładności maszyny roboczej do prądkości wału
silnika
Zastępczy moment bezwładności układu napędowego J
z
wyznacza się, jeżeli część
elementów układu napędowego wiruje z różnymi prędkościami lub są w nim masy w ruchu
postępowym. Energia kinetyczna zastępcza E
kz
układu napędowego jest równa sumie energii
kinetycznych w ruchu obrotowym E
ko
i w ruchu postępowym E
kp
poszczególnych elementów
znajdujących się w ruchu .
Energia kinetyczna w ruchu obrotowym
E
ko
= J
2
2
ω
[E
k
] = N
⋅m
Energia kinetyczna w ruchu postępowym
E
kp
=
2
2
υ
m
Energia kinetyczna o zastępczym momencie bezwładności przy prędkości silnika
ω
s
E
kz
= J
z
2
2
s
ω
E
kz
= E
ko1
+ E
ko2
+ E
ko3
+...+ E
kp1
+ E
kp2
+...
J
z
2
2
s
ω
= J
s
2
2
s
ω
+ J
1
2
2
1
ω
+ J
2
2
2
2
ω
+ J
3
2
2
3
ω
+...+
2
2
1
1
υ
m
+
2
2
2
2
υ
m
+...
J
z
= J
s
+ J
1
2
2
1
s
ω
ω
+ J
2
2
2
2
s
ω
ω
+ J
3
2
2
3
s
ω
ω
+...+
2
2
1
1
s
m
ω
υ
+
2
2
2
2
s
m
ω
υ
+...
Podstawiając:
2
1
2
1
2
2
1
1
−
=
=
i
i
s
ω
ω
;
2
2
2
2
2
2
2
1
−
=
=
i
i
s
ω
ω
; ...
otrzymujemy: J
z
= J
s
+J
1
2
1
−
i +J
2
2
2
−
i +J
3
2
3
−
i +...+ m
1
2
1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
s
ω
υ
+
m
2
2
2
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
s
ω
υ
+...
W ogólnej postaci możemy zapisać:
J
z
=
J
s
+
∑
=
−
⋅
n
k
k
k
i
J
1
2
+
∑
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
m
l
s
l
l
m
1
2
ω
υ
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do zaplanowania
przebiegu ćwiczeń i ich wykonania.
1. Jaka jest zależność między mocą mechaniczną
P i momentem obrotowym silnika M
s
?
2. Jaka jest zależność między prędkością kątową
ω
i prędkością obrotową
n?
3. Jaka jest zależność między mocą
P pobieraną przez maszynę roboczą i momentem
oporowym
M
o
?
4. Jaka jest zależność na moc zapotrzebowaną w ruchu postępowym?
5. Jaka jest zależność między prędkością w ruchu postępowym
υ
a prędkością kątową
ω
?
6. Co określa moment bezwładności
J i jak się go oblicza?
7. Z jakiej zależności w praktyce wyznaczamy moment bezwładności bryły obrotowej?
8. Jaka zależność opisuje moment dynamiczny dla
J= const ?
9. Jakie jest równanie ruchu układu napędowego w postaci ogólnej?
10. Kiedy układ napędowy osiąga stan ustalony?
11. Kiedy układ napędowy pracuje stabilnie?
12. Kiedy układ napędowy pracuje niestabilnie?
13. Jak przeliczamy moment oporowy do prędkości wału silnika przy przenoszeniu bez strat?
14. Co należy uwzględnić przy przeliczaniu momentu w układzie rzeczywistym, ze stratami?
15. Jak przeliczamy moment bezwładności do prędkości wału silnika?
4.2.3. Ćwiczenia
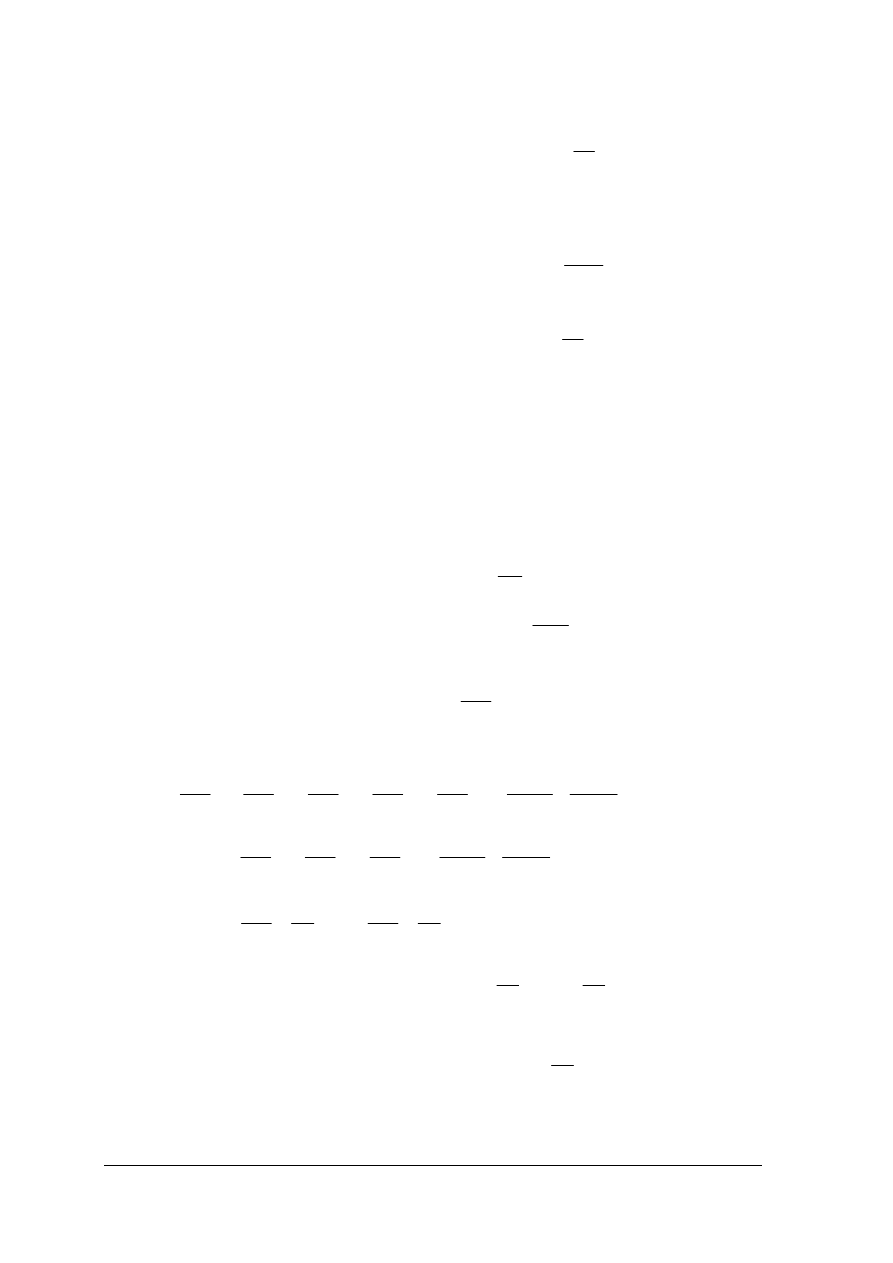
Ćwiczenie 1
Na rysunku przedstawione są charakterystyki mechaniczne silnika napędowego
i maszyny roboczej dwóch układów napędowych. Określ, który układ pracuje stabilnie,
a który niestabilnie, wpisując w kółko odpowiednio dla układu napędowego: stabilnego 1
i niestabilnego 2. Uzasadnij odpowiedź.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) narysować charakterystyki na folii lub dużym arkuszu papieru,
2) zaznaczyć prędkości odpowiednio
ω
1
<
ω
ust
i
ω
2
>
ω
ust
,
3) zaznaczyć dla
ω
1
na osi momentów wartości
M
o
oraz
M
s
i określić, który moment ma
większą wartość,
4) porównać wynik z warunkami stabilnej pracy układu napędowego,
M
s
M
o
M
ω
ω
ust
M
s
M
o
M
ω
ω
ust
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
5) powtórzyć czynności 3) i 4) dla
ω
2
,
6) wpisać w kółko odpowiednio 1 i 2 zgodnie z wynikiem analizy charakterystyk.
Wyposażenie stanowiska pracy:
− folia do grafoskopu lub arkusze papieru,
− tekst przewodni z instrukcją rozwiązania zadania,
− arkusze papieru formatu A4.
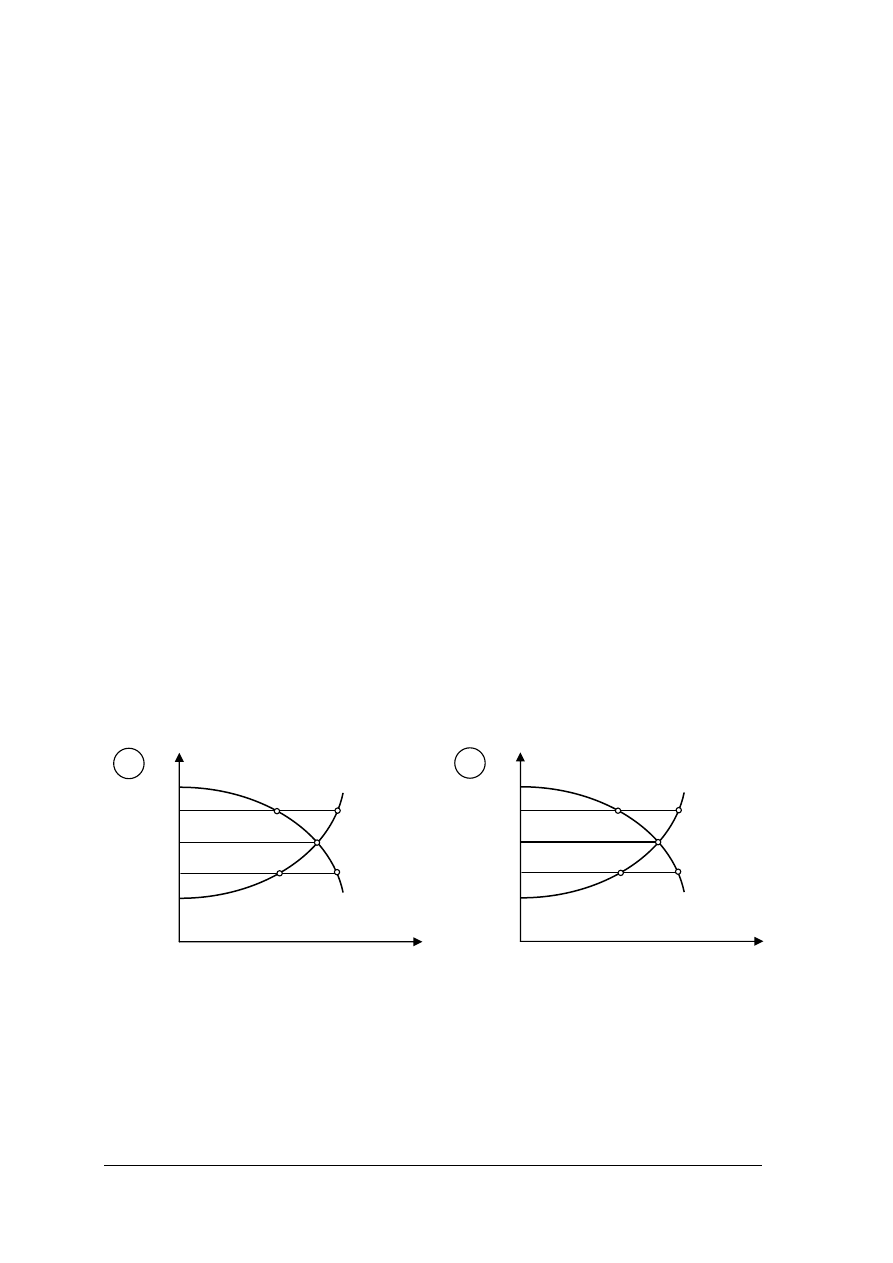
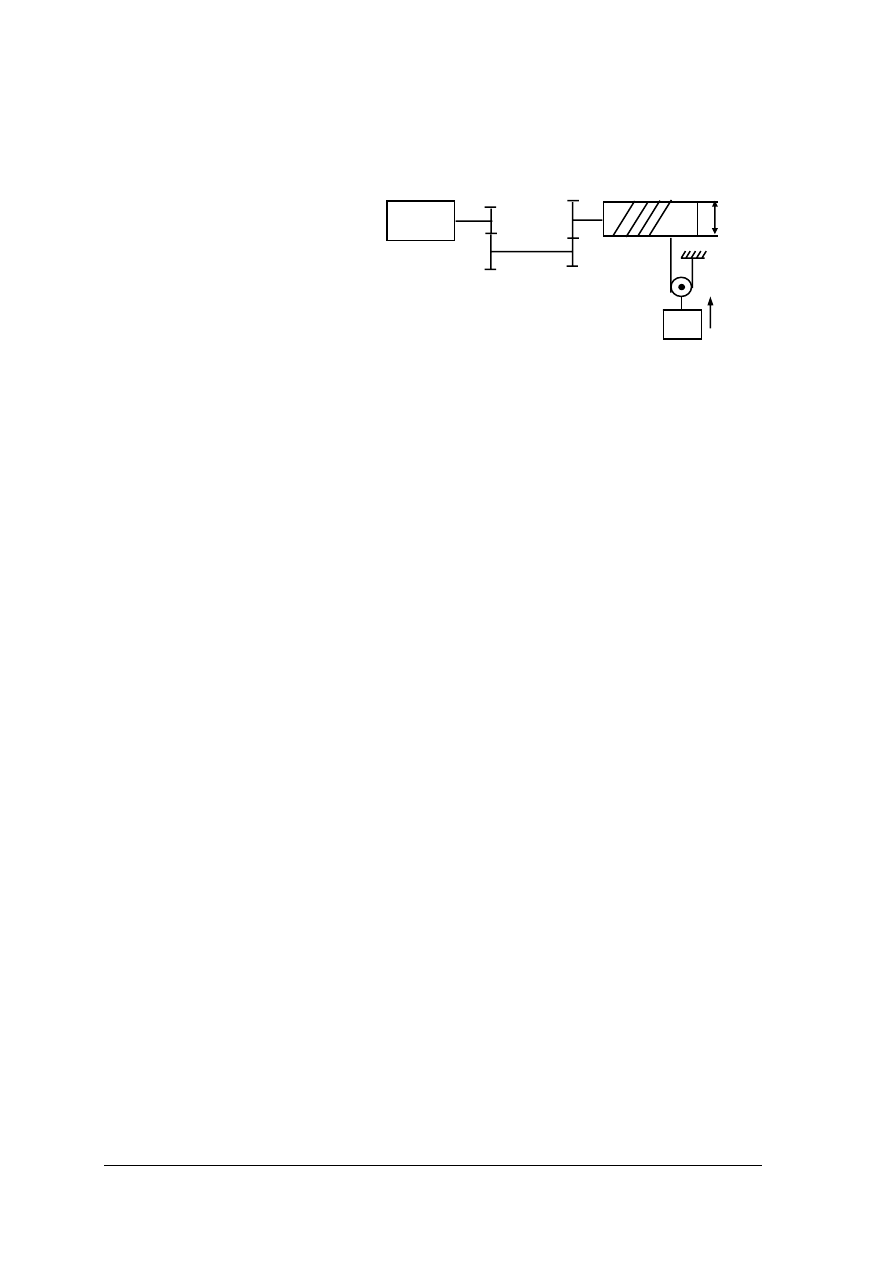
Ćwiczenie 2
Dla układu przedstawionego na rysunku wyznacz:
1) moment oporowy zastępczy przy podnoszeniu i opuszczaniu kabiny dźwigu:
a) z ładunkiem
b) bez ładunku
2) moment bezwładności sprowadzony
do wału silnika dla obu przypadków.
Dane:
G
k
= 4 kN
G = 12 kN
G
p
= 8 kN
υ
o
= 2 m/s
ω
s
= 102,6 rad/s
η
1
=
η
1
= 0,97
η
b
= 0,96
Moment bezwładności bębna i przekładni pominąć.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) obliczyć siłę oporową wypadkową
F
o
przy podnoszeniu kabiny z ładunkiem,
2) określić kierunek przepływu energii przy podnoszeniu kabiny z ładunkiem,
3) zapisać zależność na zastępczy moment oporowy w ruchu postępowym dla ustalonego
kierunku przepływu energii,
4) podstawić wartości liczbowe i wykonać obliczenia,
5) obliczyć siłę oporową wypadkową
F
o
przy podnoszeniu kabiny bez ładunku,
6) określić kierunek przepływu energii przy podnoszeniu kabiny bez ładunku,
7) zapisać zależność na zastępczy moment oporowy w ruchu postępowym dla ustalonego
kierunku przepływu energii,
8) podstawić wartości liczbowe i wykonać obliczenia,
9) obliczyć siłę oporową wypadkową
F
o
przy opuszczaniu kabiny z ładunkiem,
10) określić kierunek przepływu energii przy opuszczaniu kabiny z ładunkiem,
11) zapisać zależność na zastępczy moment oporowy w ruchu postępowym dla ustalonego
kierunku przepływu energii,
12) podstawić wartości liczbowe i wykonać obliczenia,
13) obliczyć siłę oporową wypadkową
F
o
przy opuszczaniu kabiny bez ładunku,
14) określić kierunek przepływu energii przy opuszczaniu kabiny bez ładunku,
15) zapisać zależność na zastępczy moment oporowy w ruchu postępowym dla ustalonego
kierunku przepływu energii,
16) podstawić wartości liczbowe i wykonać obliczenia,
17) porównać wyniki i wyciągnąć wnioski,
S
G + G
k
G
p
M
s
,
ω
s
F
o
,
υ
o
υ
o
η
b
MR
η
1
η
2
i
1
i
2
D
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
18) zapisać zależność na zastępczy moment bezwładności mas w ruchu postępowym,
19) wyznaczy masę wypadkową ciał w ruchu postępowym przy podnoszeniu i opuszczaniu
kabiny z ładunkiem,
20) podstawić wartości liczbowe do wzoru na zastępczy moment bezwładności i wykonać
obliczenia,
21) wyznaczy masę wypadkową ciał w ruchu postępowym przy podnoszeniu i opuszczaniu
kabiny bez ładunku,
22) podstawić wartości liczbowe do wzoru na zastępczy moment bezwładności i wykonać
obliczenia,
23) przeanalizować wyniki i wyciągnąć wnioski.
Wyposażenie stanowiska pracy:
− kalkulator,
− tekst przewodni z instrukcją rozwiązania zadania,
− arkusze papieru formatu A4.
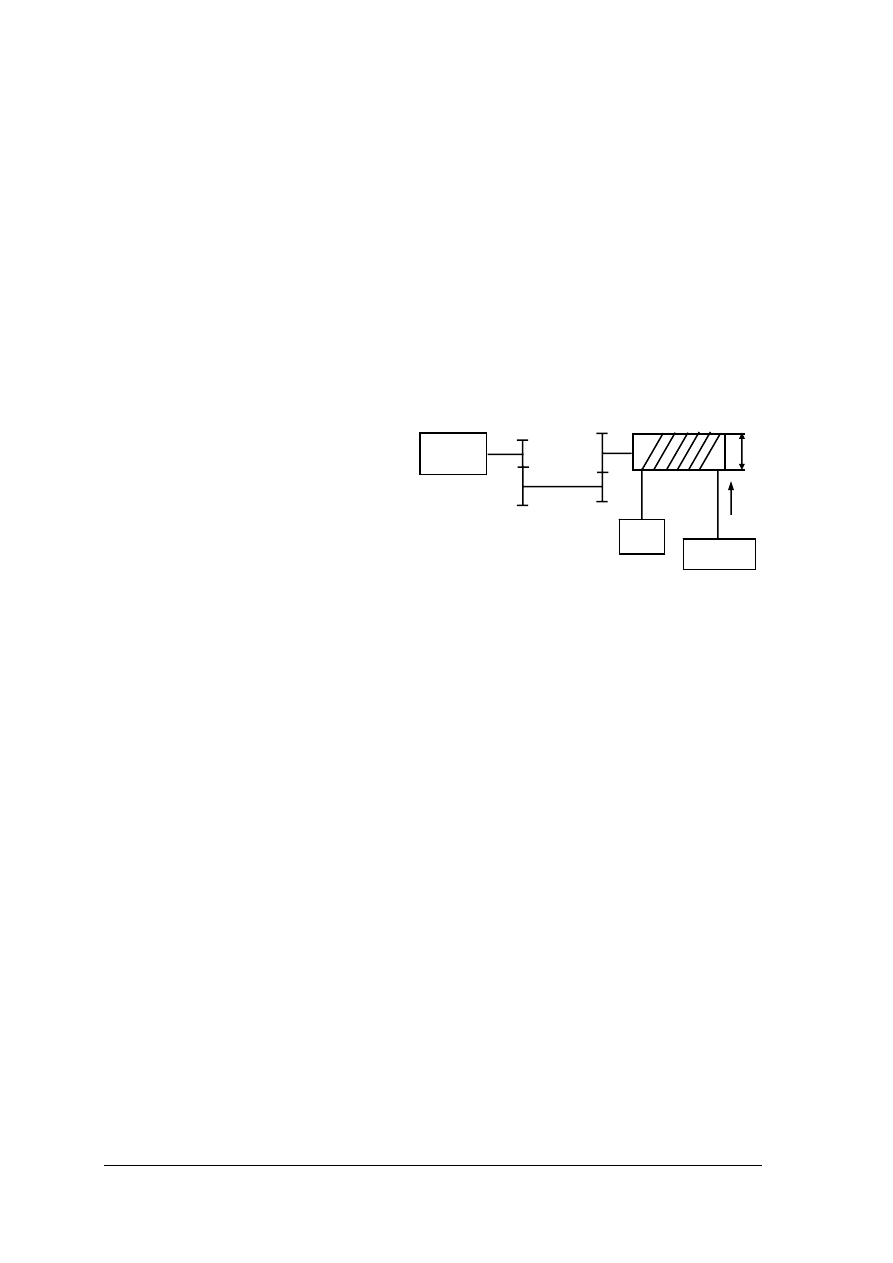
Ćwiczenie 3
Dany jest układ dźwigowy jak na rysunku. Oblicz zastępczy moment bezwładności
układu sprowadzony do prędkości wału silnika przy podnoszeniu ładunku o ciężarze
G = 6 kN z prędkością
υ
o
=0,5m/s
DANE:
J
M
= 0,75 kg
⋅m
2
J
sp1
= 0,025 kg
⋅m
2
J
1
= 0,1 kg
⋅m
2
J
2
= 1,5 kg
⋅m
2
J
3
= 3,4 kg
⋅m
2
J
4
= 0,02 kg
⋅m
2
J
b
= 0,95 kg
⋅m
2
J
sp2
= 0,6 kg
⋅m
2
ω
s
= 150,8 rad
⋅s
-1
i
1
= 6
i
2
= 10
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapisać bilans energii dla układu przedstawionego na rysunku (
E
z
=
ΣE
obr
+
ΣE
post
),
2) zapisać zależność na zastępczy moment bezwładności dla układu, zwracając uwagę, że
występują w nim dwie przekładnie,
3) podstawić wartości liczbowe i wykonać obliczenia,
4) wpisać jednostkę i zapisać odpowiedź.
Wyposażenie stanowiska pracy:
− zadanie do wykonania z tekstem przewodnim,
− kalkulator,
− arkusze papieru formatu A4,
− przybory do pisania.
G
i
1
J
s
,
ω
s
F
o
,
υ
o
υ
0
i
2
p
MR
J
b
,
ω
b
S
J
1
J
sp1
J
sp2
J
4
J
2
J
3
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
S
G
i
1
M
s
,
ω
s
F = 0,5G
F = 0,5G
υ
o
i
2
D
p
MR
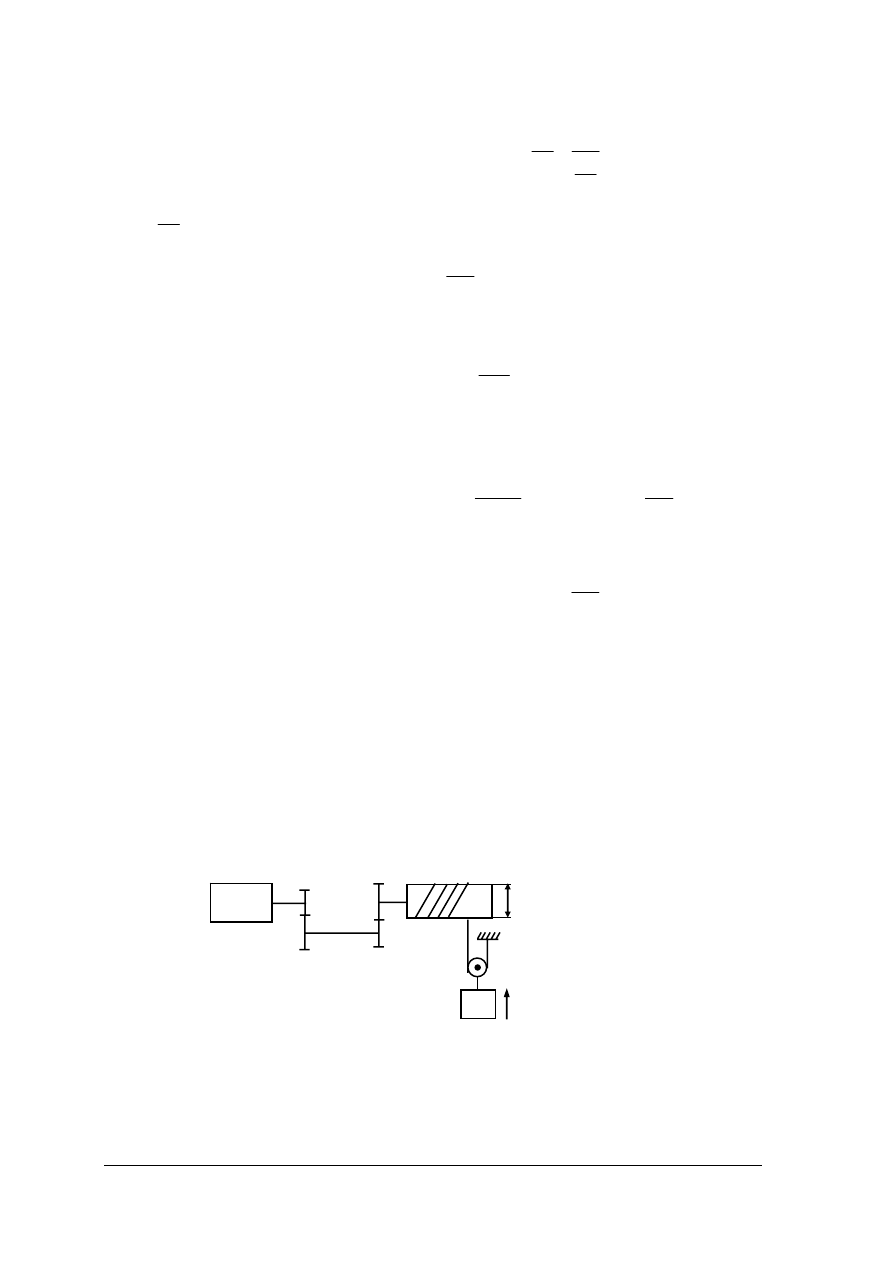
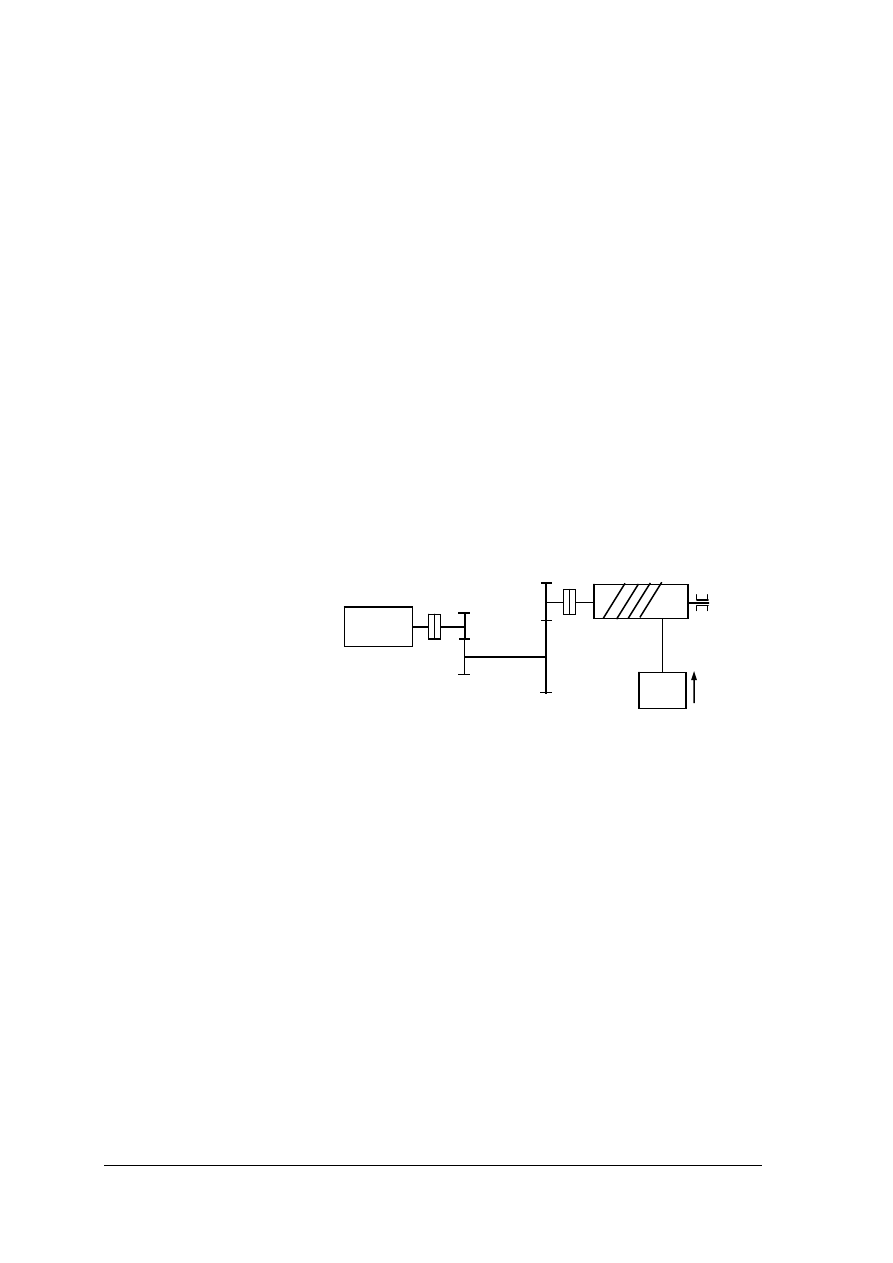
Ćwiczenie 4
Wyznacz zastępczy moment oporowy sprowadzony do prędkości wału silnika przy
podnoszeniu i opuszczaniu ładunku w układzie jak na rysunku:
DANE
:
G = 12 kN
υ
o
= 2 m/s
ω
s
= 102,6 rad/s
η
1
=
η
1
= 0,97
η
b
= 0,96
Moment bezwładności bębna i przekładni pominąć.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wypisać dane i szukane,
2) obliczyć siłę oporową wypadkową
F
o
przy podnoszeniu ładunku,
3) określić kierunek przepływu energii przy podnoszeniu ładunku,
4) zapisać zależność na zastępczy moment oporowy w ruchu postępowym dla ustalonego
kierunku przepływu energii,
5) podstawić wartości liczbowe i wykonać obliczenia,
6) obliczyć siłę oporową wypadkową
F
o
przy opuszczaniu ładunku,
7) określić kierunek przepływu energii przy opuszczaniu ładunku,
8) zapisać zależność na zastępczy moment oporowy w ruchu postępowym dla ustalonego
kierunku przepływu energii,
9) podstawić wartości liczbowe i wykonać obliczenia,
10) porównać otrzymane wyniki i wyciągnąć wnioski, w którym przypadku jest
zapotrzebowanie na większy moment napędowy i dlaczego.
Wyposażenie stanowiska pracy:
− kalkulator,
− arkusze papieru formatu A4,
− przybory do pisania.
4.2.4. Sprawdzian postępów
Czy
potrafisz:
Tak
Nie
1) zdefiniować moment bezwładności?
2) scharakteryzować stan ustalony układu napędowego?
3) scharakteryzować stany przejściowe układu napędowego?
4) zapisać równanie ruchu układu napędowego?
5) rozróżnić zastępczy moment oporowy od zastępczego momentu
bezwładności?
6) obliczyć zastępczy moment oporowy w układzie bez strat?
7) określić kierunek przepływu energii?
8) obliczyć zastępczy moment oporowy w układzie ze stratami przy
przepływie energii od silnika do maszyny roboczej?

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
9) obliczyć zastępczy moment oporowy w układzie ze stratami przy
przepływie energii od maszyny roboczej do silnika?
10) obliczyć zastępczy moment bezwładności sprowadzony do
prędkości wirowania silnika dla ruchu obrotowego?
11) obliczyć zastępczy moment bezwładności sprowadzony do
prędkości wirowania silnika dla ruchu postępowego?
12) na podstawie charakterystyki mechanicznej silnika i maszyny
roboczej ocenić, czy układ będzie pracował stabilnie?
4.3. Charakterystyka ogólnych wytycznych doboru
i nagrzewania silnika
4.3.1. Materiał nauczania
A. Ogólne wytyczne doboru silnika
[1]
Dobierając silnik do układu napędowego należy szczególną uwagę zwrócić na warunki
pracy i tak dobrać moc silnika, aby w całym zakresie pracy nie przekroczyć dopuszczalnych
przyrostów temperatury.
Aby prawidłowo dobrać silnik, należy mieć następujące informacje dotyczące układu
napędowego:
– rodzaj maszyny roboczej,
– sposób pracy maszyny roboczej,
– przebieg cyklu pracy,
– wymagania odnośnie zakresu sterowania prędkości,
– zapotrzebowanie mocy,
– częstość i wartości występujących przeciążeń,
– wartości momentu rozruchowego, czas trwania i częstość rozruchu,
– warunki pracy maszyny roboczej.
Dobranie silnika polega na określeniu: [1]
1. rodzaju silnika – powinien być przystosowany do wymagań maszyny roboczej,
2. mocy silnika – zbyt mała moc może powodować nadmierne nagrzewanie się silnika, zbyt
duża sprawia, że układ pracuje nieekonomicznie, a w przypadku silników trójfazowych
powoduje pogorszenie współczynnika mocy układu,
3. momentu silnika – musi zapewnić pokonanie momentu statycznego i przeciążeń
momentem, a także zapewnić odpowiedni moment dynamiczny w stanach przejściowych
(zbyt duży moment dynamiczny może powodować niebezpieczne dla maszyny roboczej
i silnika przyśpieszenia w stanach przejściowych),
4. prędkości kątowej (obrotowej) silnika – przy sprzężeniu bezpośrednim powinna być
możliwie zbliżona do prędkości maszyny roboczej, przy sprzężeniu pośrednim stosunek
prędkości określa przełożenie przekładni,
5. rodzaju konstrukcji – zależy od sposobu mocowania i ułożenia silnika,
6. rodzaju budowy pod względem stopnia ochrony IP – w zależności od warunków pracy
silnika.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
B. Nagrzewanie i stygnięcie silnika
Podczas przetwarzania energii w każdej maszynie występują straty, których część
powoduje podwyższenie temperatury poszczególnych części maszyny, część zaś jest
oddawana do otoczenia. Wysoka temperatura stanowi zagrożenie dla silnika – zmniejsza
żywotność (starzenie się izolacji), bądź powoduje uszkodzenie w skutek przegrzania.
Dopuszczalna temperatura poszczególnych części zależy od klasy izolacji i rodzaju
chłodzenia.
Ponieważ maszyna elektryczna jest pod względem cieplnym układem bardzo złożonym,
analityczne określenie ustalonej temperatury poszczególnych elementów maszyny jest trudne.
Szczególnie skomplikowane jest analityczne ujęcie zagadnień nagrzewania maszyny
w stanach cieplnie nieustalonych [2]. Zdolność magazynowania ciepła w silnikach określa:
– stała czasowa nagrzewania całego silnika
T
z
,
– stała czasowa nagrzewania uzwojenia silnika
T
A
określona przy założeniu, że ciepło
wydzielone w uzwojeniach silnika nie przenika do jego żelaza. [1]
Stała czasowa
T
A
zawiera się w granicach 420
÷600 s. Czas ustalania się równowagi cieplnej
maszyny na skutek przenikania ciepła z uzwojenia do żelaza, który odwzorowuje stała
czasowa maszyny
T
z
zawiera się w granicach od 30 minut do 3 godzin.
Przyrost temperatury zmienia się według krzywych
∆
ϑ
= f(
t) przedstawionych na rys. 10.
Rys. 10. Przebieg krzywej nagrzewania (1) i stygnięcia (2) maszyny elektrycznej
Przy stałej wartości strat mocy krzywą nagrzewania maszyny można opisać
zależnością: [2]
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
∆
=
∆
−
z
T
t
ust
e
1
ϑ
ϑ
natomiast proces stygnięcia opisuje zależność:
`
z
T
t
ust
e
−
∆
=
∆
ϑ
ϑ
gdzie:
S
cm
T
z
α
=
,
c
m
– pojemność cieplna maszyny,
α
S – zdolność oddawania ciepła.
Stałe czasowe maszyny nagrzewania
T
z
i stygnięcia
T
z
` w ogólnym przypadku mają
różne wartości ze względu na różne warunku przebiegu procesu.
t
∆P
∆
ϑ
ust
∆
ϑ
0,63
∆ϑ
ust
T
z
T
z
`
0,63
∆
ϑ
ust
t
1
2
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
C. Rodzaje pracy silników elektrycznych
Pracę, do której w określonych warunkach silnik jest przeznaczony, charakteryzują dane
znamionowe silnika. Obciążeniem znamionowym lub mocą znamionową silnika nazywa się
obciążenie, którego wartość i przebieg w czasie są zgodne z danymi znamionowymi maszyny.
Przez przebieg obciążenia silnika rozumie się przyporządkowanie określonych obciążeń
kolejnym przedziałom czasu. Regularny przebieg obciążenia w czasie, dający się odtworzyć
w warunkach laboratoryjnych (warunkach badania), nazywa się rodzajem pracy silnika.
Rodzaj pracy podany na tabliczce znamionowej nazywamy znamionowym rodzajem pracy.
Polska Norma PN-88/E-06701 „Maszyny elektryczne wirujące. Ogólne wymagania
i badania” określa 9 rodzajów pracy oznaczonych symbolami od S1 do S9. Rodzaje pracy
możemy podzielić na 4 grupy:
I.
Praca ciągła – S1 (dawniej C).
II.
Praca dorywcza – S2 (dawniej D).
III.
Praca okresowa – S3
÷ S8 – praca o przebiegu obciążenia powtarzającym
się okresowo.
IV.
Praca nieokresowa – S9.
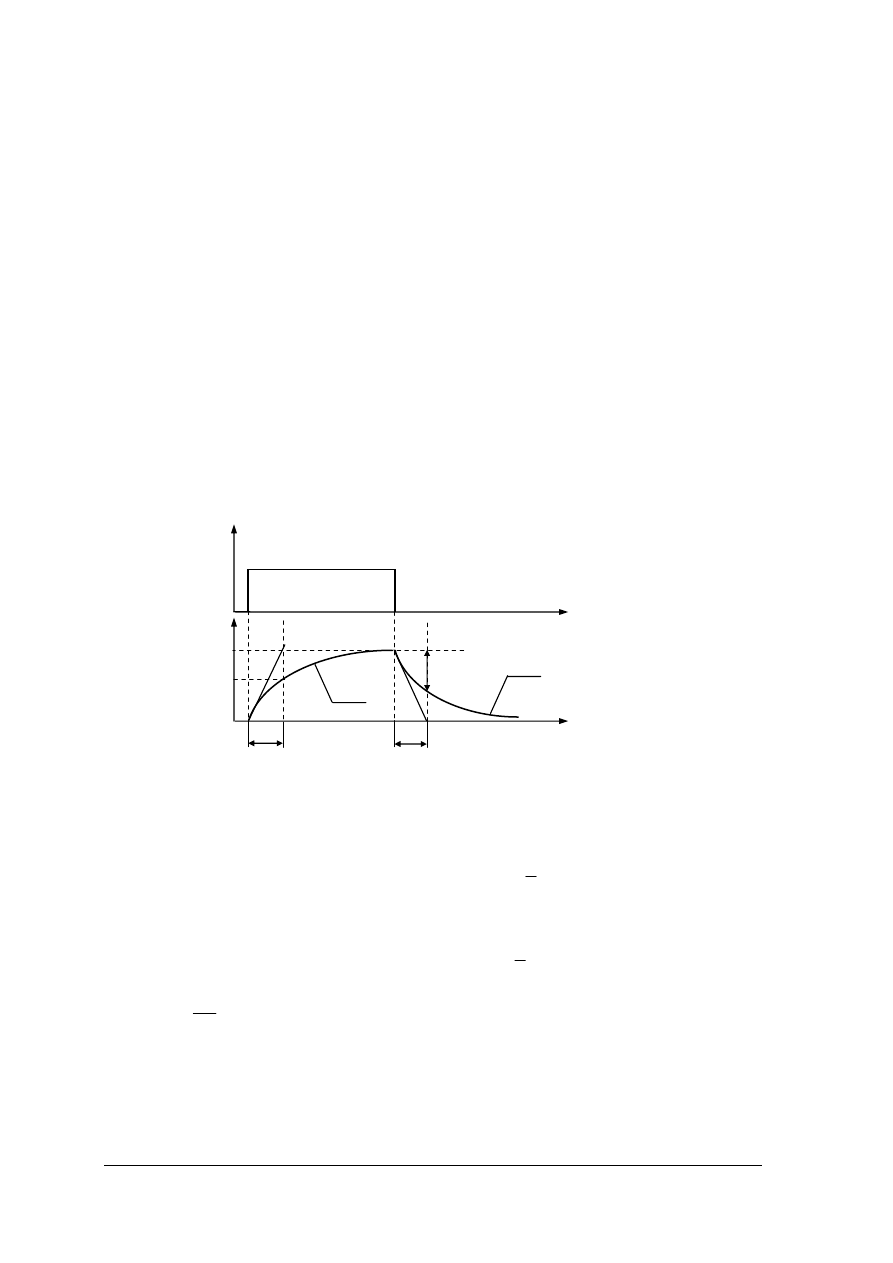
S1 – praca ciągła, praca z obciążeniem o stałej wartości, trwającym tak długo, aż maszyna
osiągnie stan równowagi cieplnej (rys. 11), tzn., że przyrosty temperatury nie zmieniają
się więcej niż 2
o
/h.
Rys. 11. Wykres dla pracy ciągłej S1
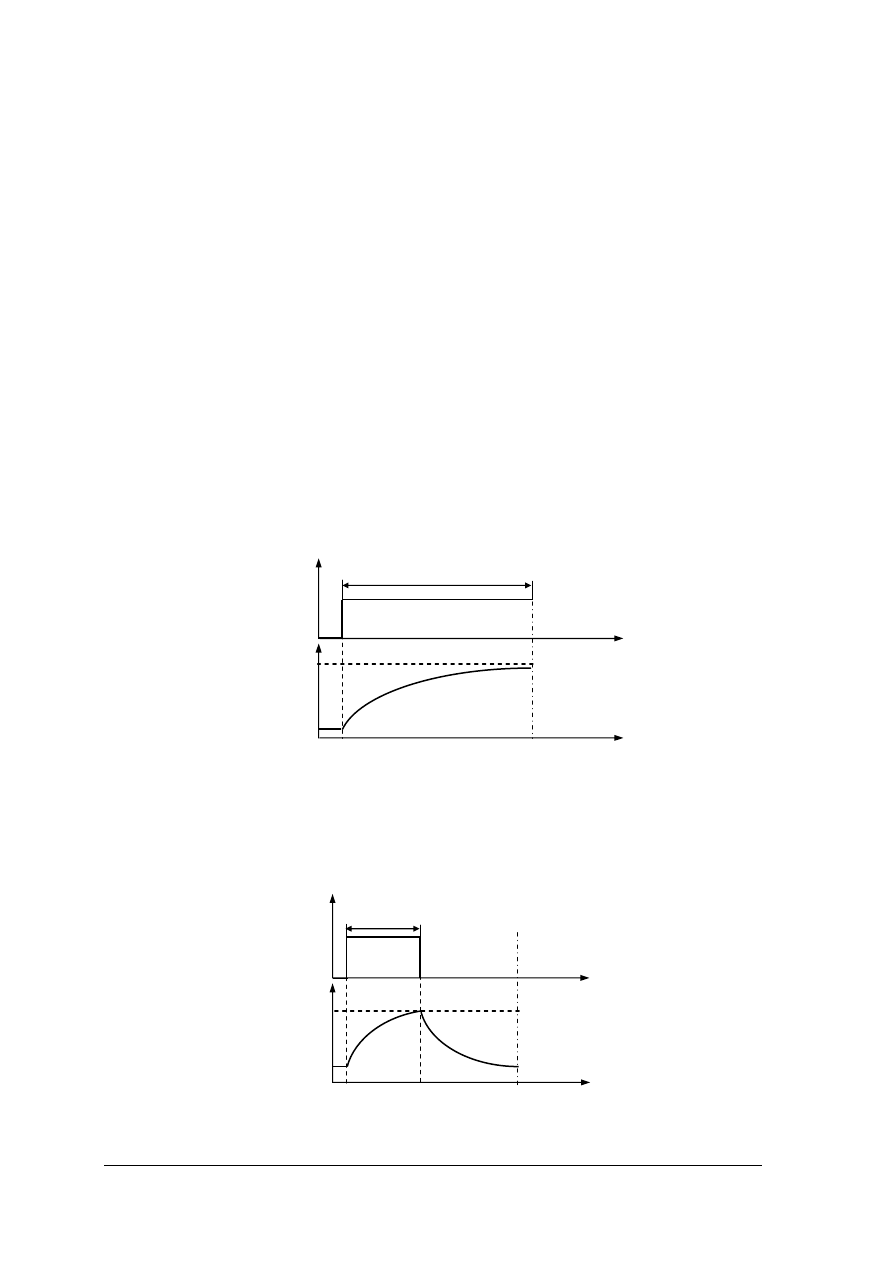
S2 – praca dorywcza, praca z obciążeniem o stałej wartości trwającym przez czas określony
tak, że żadna z części silnika nie osiągnie temperatury ustalonej z następującym po tym
czasie postojem, podczas którego każda z części silnika osiągnie temperaturę nie
różniącą się od temperatury otoczenia więcej niż o 2
o
C.(rys. 12)
Rys. 12. Wykres dla pracy dorywczej S2
ϑ
ϑ
0
ϑ
ust
t
t
P
t
p
ϑ
ϑ
max
t
ϑ
0
t
P
t
p
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Symbol pracy dorywczej składa się z oznaczenia S2 oraz czasu pracy wynoszącego 10, 30, 60
lub 90 minut, który określa czas obciążenia silnika mocą znamionową podczas pracy
dorywczej. Np. S2 30 min oznacza, że silnik może być obciążony mocą znamionową przez
30 minut, po czym następuje postój, podczas którego silnik stygnie do temperatury otoczenia.
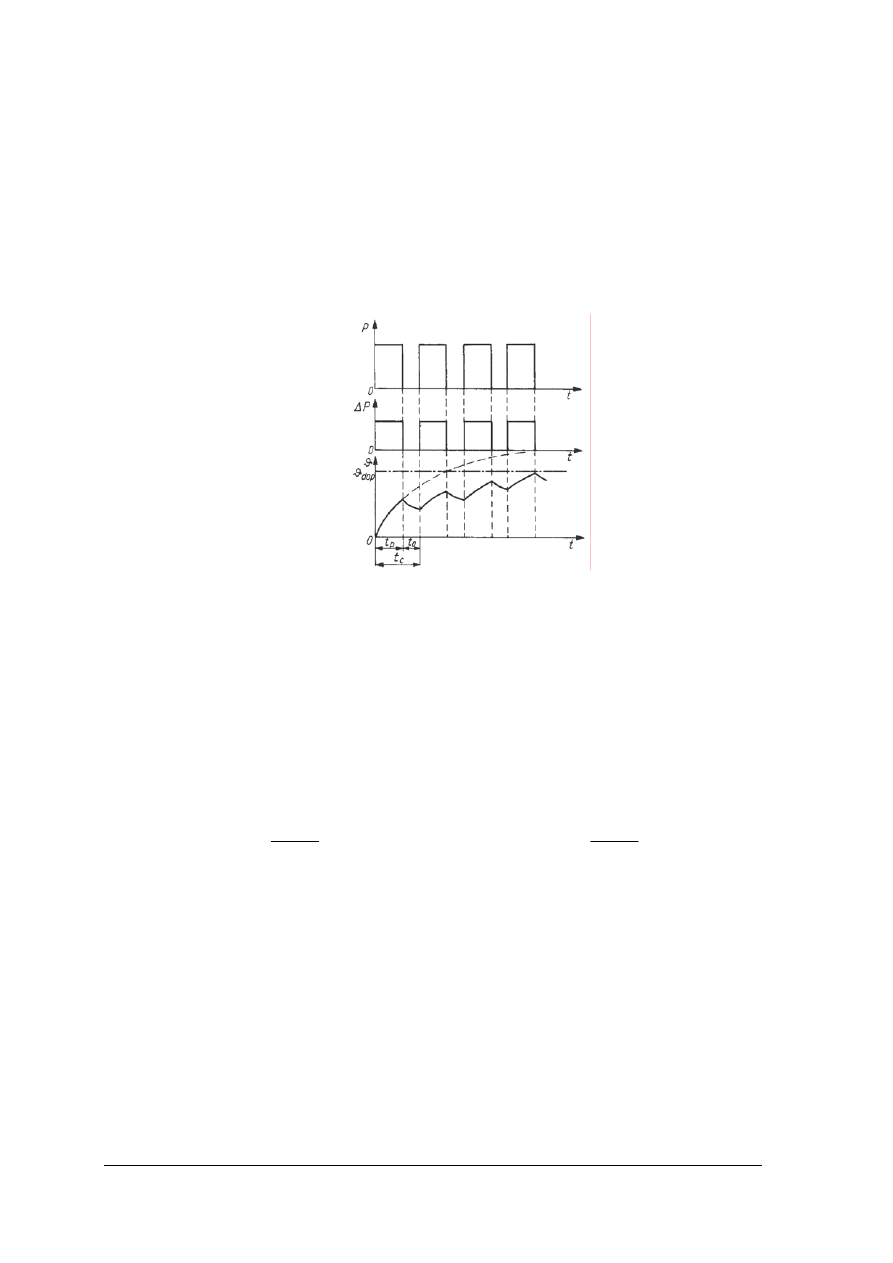
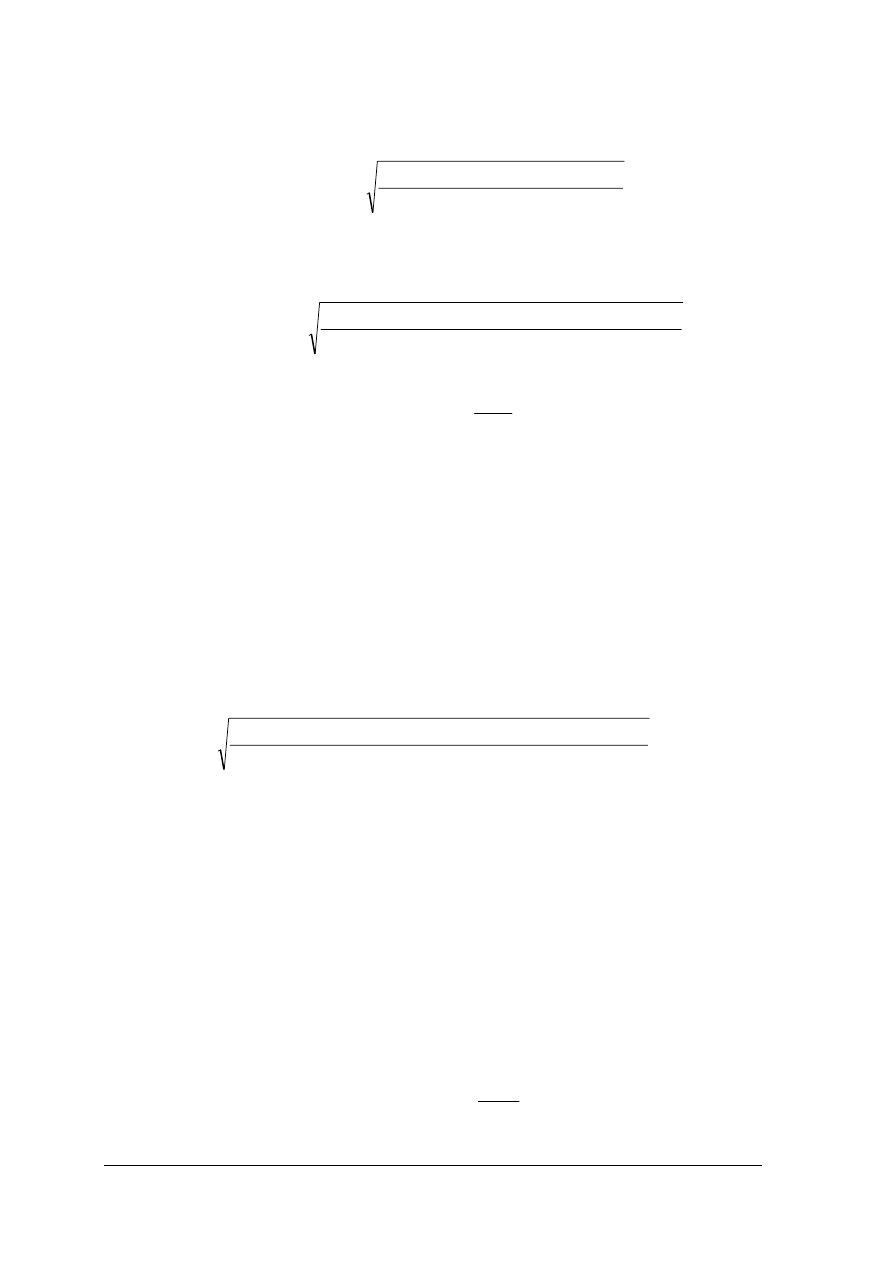
S3 – praca przerywana okresowa , praca o przebiegu obciążenia powtarzającym się okresowo,
gdzie każdy okres (cykl) obejmuje czas pracy
t
p
przy obciążeniu o stałej wartości i czas
postoju
t
0
. (rys. 13) Praca trwa przynajmniej do czasu osiągnięcia przez silnik stanu
równowagi cieplnej.
Rys. 13. Wykres dla pracy okresowej przerywanej S3 [2]
Czas trwania cyklu:
t
c
=
t
p
+
t
0
Cykl zmienności obciążenia
t
c
nie jest znormalizowany i jeśli wytwórca nie określa jego
wartości, to przyjmuje się
t
c
= 10 minut.
Symbol pracy okresowej przerywanej składa się z oznaczenia S3 oraz względnego czasu
pracy wynoszącego 15, 25, 40 lub 60%, np. S3 40%.
Względny czas pracy
0
t
t
t
p
p
+
=
ε
lub w procentach
%
100
0
%
t
t
t
p
p
+
=
ε
S4 – praca przerywana z dużą liczbą łączeń i hamowaniem mechanicznym, praca okresowa,
gdzie każdy cykl obejmuje czasy: rozruchu, pracy przy obciążeniu o stałej wartości,
hamowania mechanicznego, postoju. Praca trwa co najmniej do czasu osiągnięcia przez
silnik równowagi cieplnej.
Symbol pracy składa się z oznaczenia S4, względnego czasu pracy (15, 25, 40 i 60%), liczby
okresów na godzinę (20, 60, 120, 180, 240) oraz współczynnika bezwładności (1,2; 1,6; 2,5;
4) [2].
S5 – praca przerywana z dużą liczbą łączeń i hamowaniem elektrycznym, każdy cykl pracy
obejmuje czasy: rozruchu, pracy przy obciążeniu o stałej wartości, hamowania
elektrycznego oraz postoju. Praca trwa do czasu osiągnięcia przez silnik równowagi
cieplnej.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Symbol pracy składa się z oznaczenia S5, względnego czasu pracy, liczby cykli na godzinę
oraz symbolu współczynnika bezwładności (wszystkie wartości jak przy pracy S4).
S6 – praca długotrwała z przerwami jałowymi, cykl pracy obejmuje czas pracy przy
obciążeniu o stałej wartości i czas pracy przy biegu jałowym. Praca trwa do czasu
osiągnięcia przez silnik równowagi cieplnej.
Symbol pracy składa się z oznaczenia S6 oraz względnego czasu obciążenia o stałej wartości
wynoszącego 15, 25, 40 lub 60%.
S7 – praca długotrwała z dużą liczbą łączeń i hamowaniem elektrycznym, cykl obejmuje
czasy: rozruchu, pracy przy obciążeniu o stałej wartości, hamowanie elektryczne.
Symbol składa się z oznaczenia S7, liczby łączeń na godzinę (30, 60, 120 i 240) i symbolu
współczynnika bezwładności jak przy pracy S4.
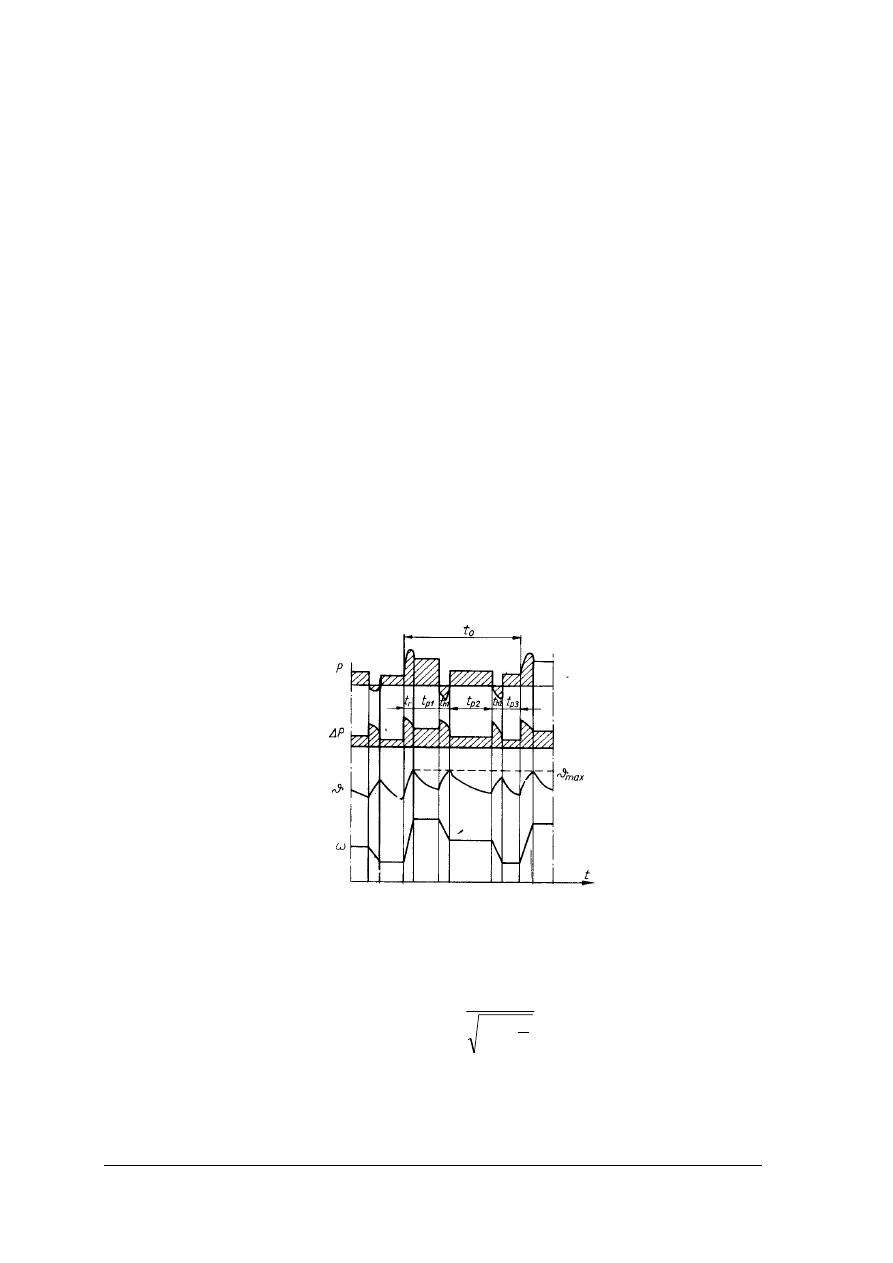
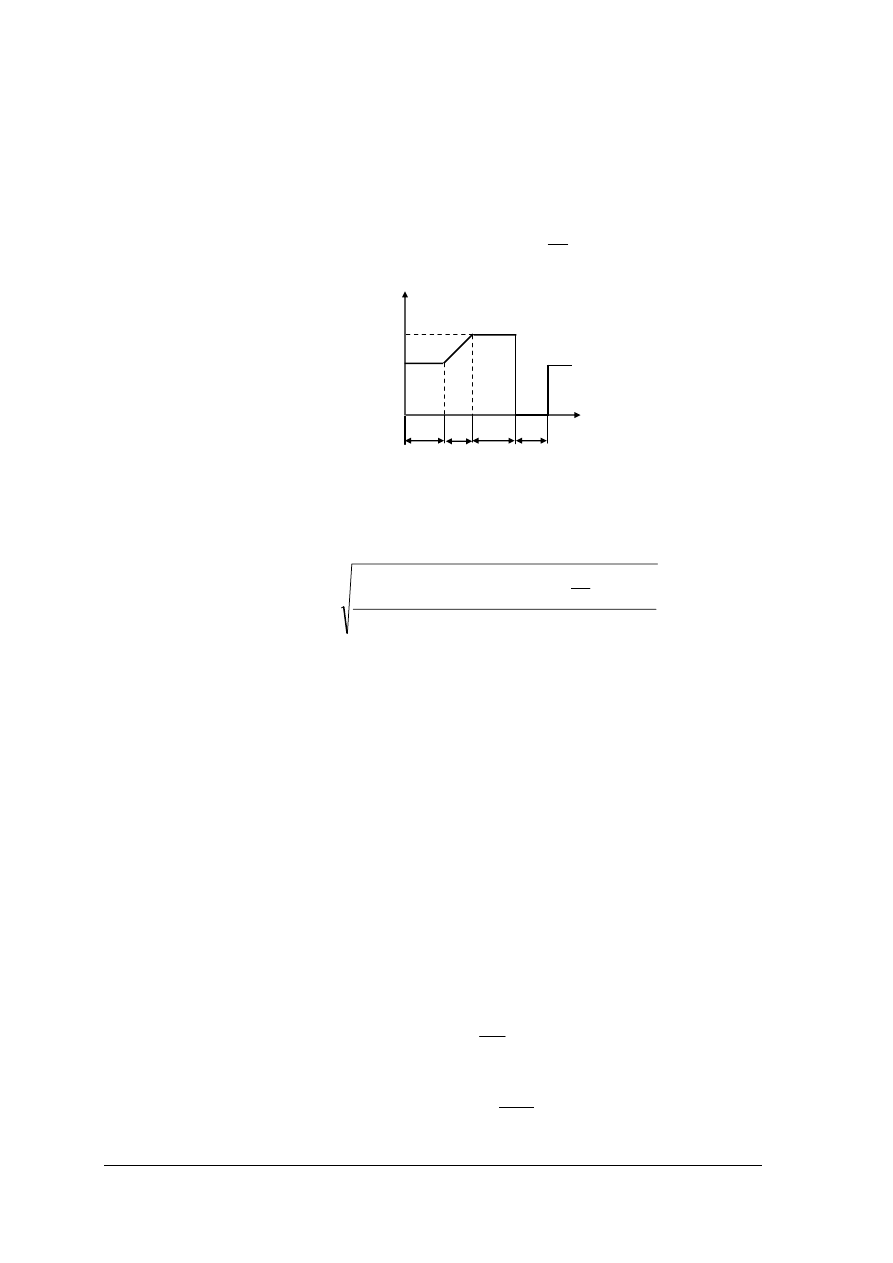
S8 – praca długotrwała z okresową zmianą prędkości kątowej, każdy cykl obejmuje pracę
przy stałym obciążeniu, odpowiadającym określonej prędkości kątowej, po czym
następuje jeden lub więcej okresów pracy przy innych obciążeniach, odpowiadających
innym prędkościom oraz odpowiednie czasy rozruchów i hamowań elektrycznych.
Praca trwa do czasu osiągnięcia przez silnik równowagi cieplnej. Podczas jej trwania
nie występują okresy postoju. (rys. 14)
Symbol pracy składa się z oznaczenia S8, liczby łączeń na godzinę, symbolu współczynnika
bezwładności, obciążenia w kW, prędkości kątowej (obrotowej) oraz względnego czasu pracy
dla każdej części cyklu charakteryzującej się stałą prędkością kątową, np. S8 25%, 150 c/h,
F12, 24 kW, 740 obr/min.
Rys. 14. Wykres dla pracy długotrwałej S8 – z okresową zmianą prędkości wirowania. [2]
Jeżeli silnik o mocy znamionowej
P
Nc
przystosowany do pracy ciągłej chcemy obciążyć
dorywczo, to dopuszczalną moc obciążenia przy pracy dorywczej
P
Nd
obliczamy z zależności:
z
p
T
t
Nc
Nd
e
P
P
−
−
=
1
gdzie:
t
p
– czas pracy w minutach,
T
z
– stała czasowa nagrzewania silnika w minutach.
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Jeśli rzeczywisty czas pracy silnika o mocy
P
N
przeznaczonego do pracy okresowej jest
inny niż podany w danych znamionowych, to moc znamionową silnika w takim przypadku
P
Nx
obliczamy z zależności [1]:
x
N
N
Nx
P
P
ε
ε
=
gdzie:
ε
N
– względny czas pracy podany w parametrach znamionowych silnika,
ε
x
– względny czas pracy w nowych warunkach.
Silnik o mocy
P
Nc
przeznaczony do pracy ciągłej może być zastosowany do pracy
okresowej o względnym czasie pracy
ε
przy obciążeniu mocą
P
p
o wartości wyznaczonej
z zależności [1]:
ε
Nc
p
P
P
=
W przypadku doboru silnika do pracy przerywanej należy dodatkowo sprawdzić, czy
przeciążalność silnika spełnia wymagania procesu technologicznego.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do zaplanowania
przebiegu ćwiczeń i ich wykonania.
1. Co należy rozumieć pod pojęciem „rodzaj pracy”?
2. Ile rodzajów pracy określa Polska Norma i jak je oznaczamy?
3. Na jakie 4 grupy możemy podzielić rodzaje pracy?
4. Jakie rodzaje pracy określa Polska norma i jak są oznaczane?
5. Jak są definiowane poszczególne rodzaje pracy silników elektrycznych?
6. Jak przeliczysz moc znamionową silnika do pracy okresowej o innym względnym czasie
pracy?
7. Z jakiej zależności obliczysz moc obciążenia silnika przystosowanego do pracy ciągłej
przy zastosowaniu do pracy okresowej?
4.3.3. Ćwiczenia
Ćwiczenie 1
Narysuj przebieg mocy obciążenia, strat mocy i przyrostów temperatury dla pracy
okresowej S6 40%
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) narysować 3 układy współrzędnych (
P, t), (
∆P, t), (
ϑ
,
t) w jednej kolumnie,
2) narysować przebieg mocy dla pracy przerywanej z przerwami jałowymi o stałym
obciążeniu i względnym czasie 40%,
3) poprowadzić linie przerywane z punktów charakterystycznych w dół do pozostałych
układów współrzędnych,
4) narysować przebieg strat mocy, pamiętając, że silnik pracuje na biegu jałowym
w przerwach obciążenia,

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
5) narysować przebieg przyrostów temperatury,
6) przeanalizować przebieg i podzielić się swoimi uwagami z kolegami.
Wyposażenie stanowiska pracy:
− arkusze papieru lub folia do grafoskopu,
− pisaki.
Ćwiczenie 2
Wyznacz, jaką mocą można obciążyć silnik dźwigowy o mocy
P
N
= 40 kW
przeznaczony do pracy S3 25%, jeśli zastosujemy go do napędu dźwigu o względnym czasie
pracy
ε
x%
= 40%.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wypisać dane i szukane,
2) zapisać zależność pozwalającą przeliczyć moc znamionową dla innego czasy pracy,
3) podstawić wartości liczbowe i wykonać obliczenia,
4) wpisać jednostkę i podkreślić wynik końcowy,
5) porównać moc dla względnego czasu pracy
ε
x%
= 40% z
ε
N%
= 25% oraz zapisać
wnioski.
Wyposażenie stanowiska pracy:
− kalkulator,
− arkusz papieru formatu A4,
− przybory do pisania.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zdefiniować (umowny) rodzaj pracy silnika?
2) wymienić liczbę rodzajów pracy określonych w Polskiej Normie?
3) podać oznaczenia rodzajów pracy?
4) wymienić rodzaje pracy i przyporządkować oznaczenie wg PN?
5) scharakteryzować poszczególne rodzaje pracy silników?
6) przeliczyć moc znamionową silnika do pracy okresowej o innym
względnym czasie pracy?
7) obliczyć moc obciążenia silnika, przystosowanego do pracy
ciągłej, przy zastosowaniu go do pracy okresowej?

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
4.4. Dobór mocy silników elektrycznych do wymagań układu
napędowego
4.4.1. Materiał nauczania
A. Dobór mocy znamionowej silnika
Dobierając moc znamionową silnika napędowego należy uwzględnić dwa podstawowe
warunki:
– silnik w czasie pracy nie powinien się nadmiernie nagrzewać – dobór ze względu na
dopuszczalne przyrosty temperatury,
– moment maksymalny silnika powinien być większy od największego momentu, jaki
może wystąpić podczas pracy układu napędowego – dobór ze względu na przeciążalność.
1. Dobór mocy silnika elektrycznego przy obciążeniu stałym
Przy sprzężeniu bezpośrednim maszyny roboczej pracującej ze stałą prędkością
ω
o
przy
momencie obciążenia
M
o
, moc znamionową silnika napędowego wyznaczamy z zależności:
P
Ns
=
M
o
ω
o
Jeżeli silnik napędza maszynę roboczą przez przekładnię, należy uwzględnić straty
energii w przekładni o sprawności
η
p
i wówczas zależność na moc znamionową silnika
(zapotrzebowaną) przy przepływie energii od silnika do maszyny roboczej przyjmuje postać:
p
o
o
Ns
M
P
η
ω
⋅
=
Korzystając z odpowiedniego katalogu dobieramy silnik napędowy o mocy znamionowej
P
N
równej lub nieznacznie większej od mocy wyznaczonej
P
Ns
:
P
N
≥ P
Ns
.
Bardzo często silnik obciążony jest siłą oporową maszyny roboczej
F
o
, która ma działać
z określoną prędkością
υ
o
. W takim przypadku moc silnika
P
Ns
wyznaczamy z zależności:
p
o
o
Ns
F
P
η
υ
⋅
=
gdzie:
η
p
– sprawność przełożenia między momentem obciążenia a momentem napędowym.
Dobierając moc znamionową silnika należy uwzględnić również spadki napięcia w sieci
zasilającej oraz zwiększony pobór mocy przez maszynę roboczą na dotarciu.
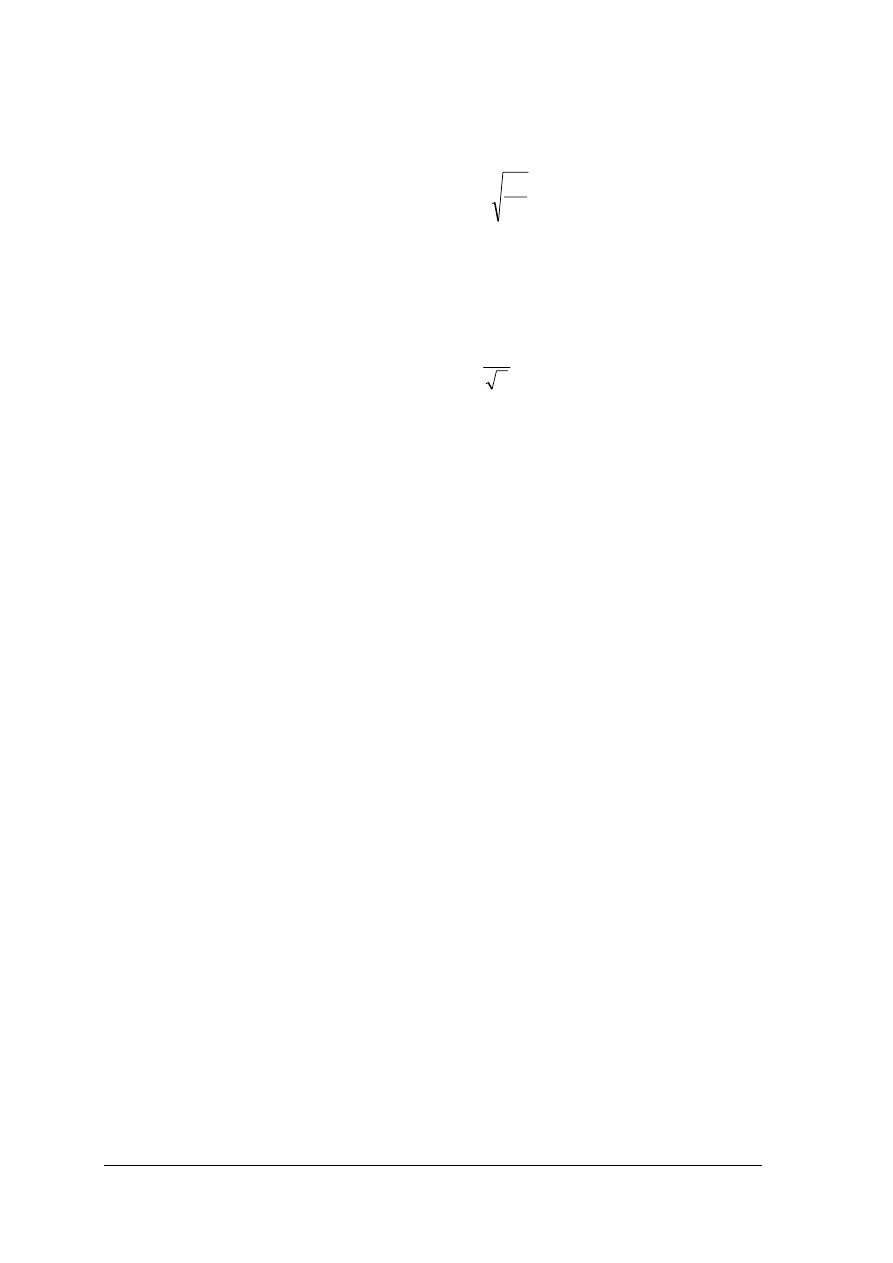
2. Dobór mocy silnika elektrycznego przy obciążeniu zmiennym
Metoda średnich strat mocy
Typowy przebieg obciążenia zmiennego przedstawia rys. 15. Jedną z najdokładniejszych
metod doboru mocy silnika napędowego przy obciążeniu zmiennym jest metoda średnich
strat mocy. Straty średnie
∆P
śr
dla tego rodzaju cyklu znajdujemy zakładając, że straty
średnie odpowiadają wydzieleniu się w czasie cyklu tej samej ilości energii, jaka
w rzeczywistym cyklu obciążenia zamienia się w silniku na ciepło.
∆P
śr
t
c
=
∆P
1
t
1
+
∆P
2
t
2
+
∆P
3
t
3
+ . . . +
∆P
n
t
n
gdzie:
∆P
śr
– średnie straty mocy,
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
t
c
=
t
1
+
t
2
+
t
3
+ . . . +
t
n
– czas cyklu,
∆P
1
,
∆P
2
,
∆P
3
, . . . ,
∆P
n
– straty mocy odpowiadające odpowiednio obciążeniom
P
1
,
P
2
,
P
3
, . . . ,
P
n
n
n
n
śr
t
t
t
t
t
P
t
P
t
P
t
P
P
+
+
+
+
⋅
∆
+
+
⋅
∆
+
⋅
∆
+
⋅
∆
=
∆
...
...
3
2
1
3
3
2
2
1
1
Rys. 15. Typowy przebieg obciążenia zmiennego
Moc znamionowa silnika P
N
pracującego przy sprawności
η
N
, dobranego z katalogu jest
prawidłowa jeśli spełniony jest warunek:
śr
N
N
N
P
P
P
∆
≥
−
η
Zachowanie powyższego warunku oznacza, że straty mocy zamienione na ciepło
w silniku podczas rzeczywistego obciążenia, nie są większe od ciepła , jakie wywiązałoby się
w silniku podczas ciągłego znamionowego obciążenia.
Jeżeli cykl pracy zawiera postoje, wówczas uwzględniamy to we wzorze na średnie straty
mocy ,dodając do czasu cyklu czas postoju
t
0
, przyjmując straty w tym czasie równe zeru
∆P = 0.
Jeżeli intensywność chłodzenia zależy od prędkości wirowania wirnika (silnik ma
chłodzenie naturalne lub przewietrzanie własne) należy uwzględnić pogorszenie się
warunków chłodzenia w czasie rozruchu
t
r
i hamowania
t
h
(współczynnik
α
) oraz w czasie
postoju
t
0
(współczynnik
β
), co zostanie szerzej omówione przy metodzie prądu zastępczego.
Metoda średnich strat mocy jest kłopotliwa dlatego w praktyce częściej stosowane są
metody zastępczego prądu, zastępczego momentu lub zastępczej mocy. Metody te są mniej
dokładne, lecz znacznie wygodniejsze w użyciu.
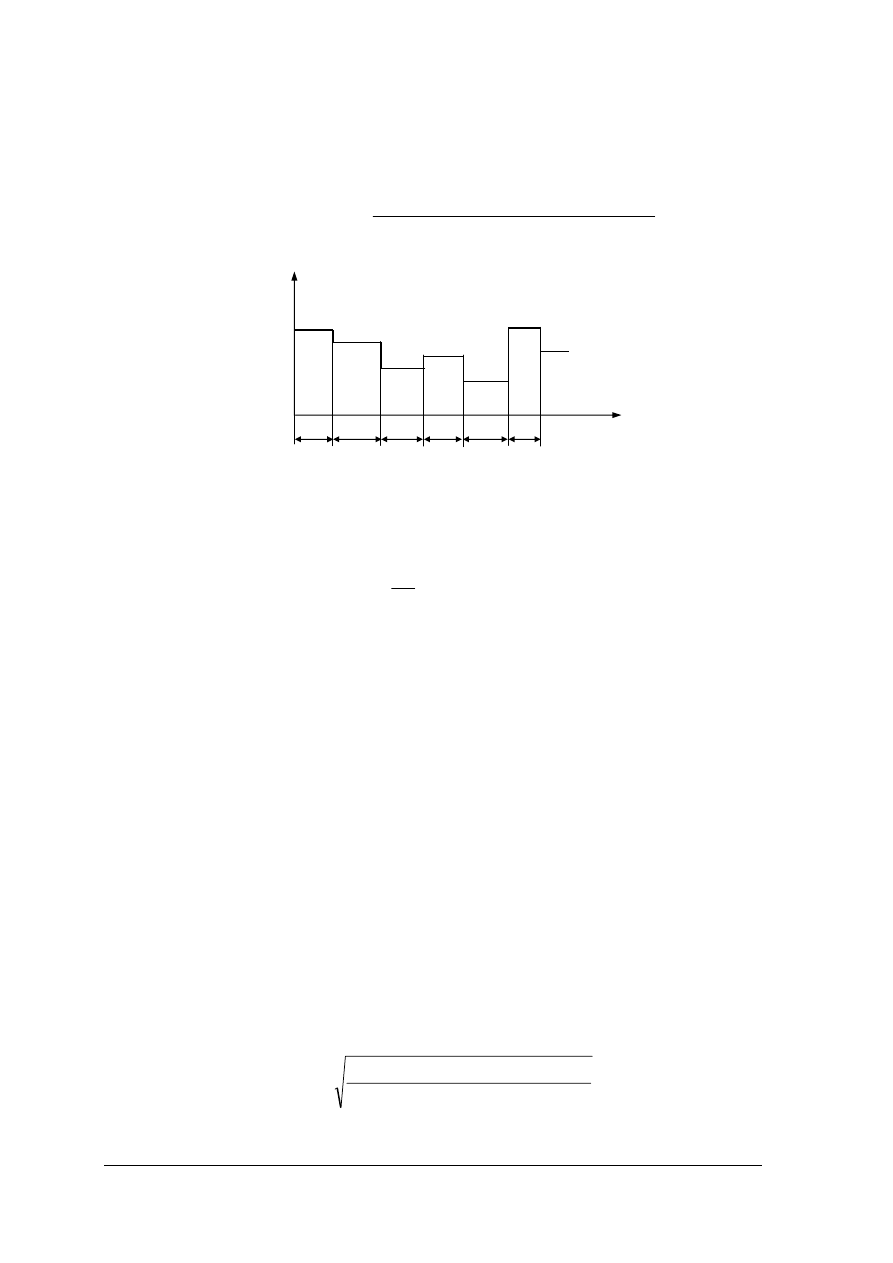
Metoda prądu zastępczego [1]
Metoda prądu zastępczego polega na wyznaczeniu prądu
I
z
o wartości stałej, tak
dobranej, że płynąc w uzwojeniu silnika wydzieliłby taką samą ilość ciepła, co okresowo
zmienny prąd rzeczywisty. Dla przebiegu obciążenia jak na rys. 16 prąd zastępczy
wyznaczamy z zależności:
n
n
n
z
t
t
t
t
t
I
t
I
t
I
t
I
I
+
+
+
+
⋅
+
+
⋅
+
⋅
+
⋅
=
...
...
3
2
1
2
3
2
3
2
2
2
1
2
1
t
P
P
1
P
6
t
1
t
2
t
3
t
4
t
5
t
6
P
2
P
3
P
4
P
5
P
7
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Prąd znamionowy silnika dobranego z katalogu powinien spełniać warunek:
I
N
≥ I
z
Rys. 16. Wykres: a) prądów, b) momentów przy obciążeniu ciągłym o zmiennej wartości
Następnie należy sprawdzić, czy moment rozruchowy rozwijany przez wybrany silnik ma
wartość wystarczającą do uruchomienia maszyny roboczej. Sprawdzić należy również, czy
ma dostatecznie dużą przeciążalność, uwzględniając spodziewane spadki napięcia w sieci.
Przy zastosowaniu metody prądu zastępczego najłatwiej sprawdzić przeciążalność prądową:
N
i
I
I
p
max
≥
gdzie:
I
max
– maksymalna wartość prądu odczytana z wykresu obciążenia,
p
i
– przeciążalność prądowa silnika podana w katalogu.
Jeżeli silnik wybrany według warunków nagrzewania nie spełnia wymagań
przeciążalności prądowej, to należy wybrać silnik o większej mocy spełniający warunek
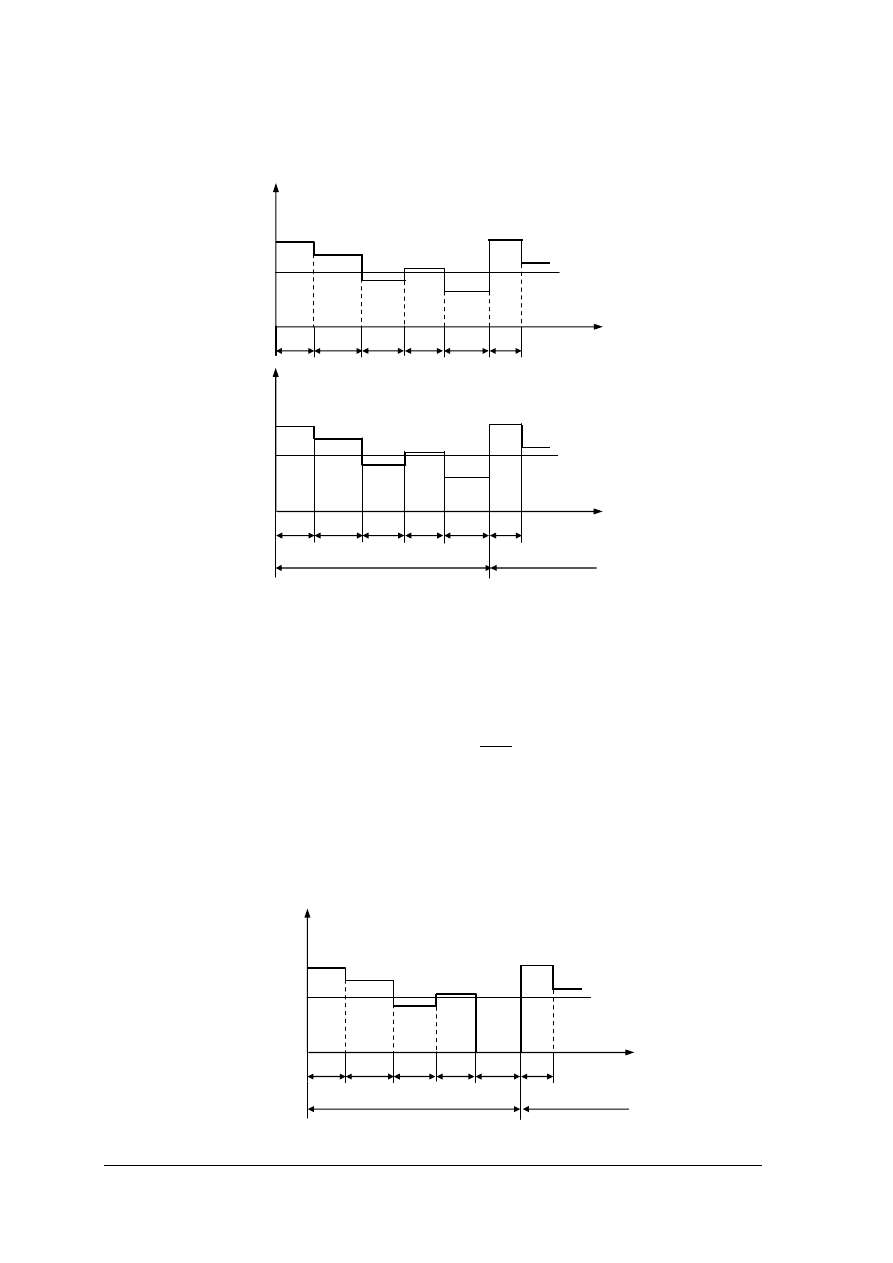
przeciążalności.
Rys. 17. Przykład przebiegu obciążenia silnika z postojem t
0
pomiędzy kolejnymi cyklami
t
I
I
5
t
1
t
2
t
3
t
4
t
5
t
6
I
1
I
2
I
3
I
4
I
6
I
7
I
z
a)
0
b)
I cykl pracy
II cykl pracy
t
M
M
1
M
6
t
1
t
2
t
3
t
4
t
5
t
6
M
2
M
3
M
4
M
5
M
z
t
I
t
1
t
2
t
3
t
4
t
0
t
5
I
6
I
0
I
1
I
2
I
3
I
4
I
5
I
z
0
I cykl pracy
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Okres postoju w cyklu pracy rys. 17 uwzględniamy zwiększając czas cyklu o czas
postoju, przyjmując prąd obciążenia w tym czasie równy zeru:
0
3
2
1
2
3
2
3
2
2
2
1
2
1
...
...
t
t
t
t
t
t
I
t
I
t
I
t
I
I
n
n
n
z
+
+
+
+
+
⋅
+
+
⋅
+
⋅
+
⋅
=
Ewentualne pogorszenie warunków chłodzenia podczas rozruchu, hamowania i postoju
wymaga uwzględnienia we wzorze na prąd zastępczy współczynników
α oraz β i wówczas
wzór na prąd zastępczy przyjmuje postać:
(
)
0
3
2
1
2
2
3
2
3
2
2
2
1
2
1
2
...
...
t
t
t
t
t
t
t
t
I
t
I
t
I
t
I
t
I
t
I
I
n
h
r
h
h
n
n
r
r
z
⋅
+
+
+
+
+
+
+
⋅
+
⋅
+
+
⋅
+
⋅
+
⋅
+
⋅
=
β
α
Współczynnik
α
jest średnią arytmetyczną dwóch wartości:
2
1
β
α
+
=
1 – cyfra odpowiadająca całkowitej prędkości wirowania i najlepszym warunkom chłodzenia,
β
– charakteryzuje pogorszenie się warunków podczas postoju.
Przy przewietrzaniu obcym
α
=
β
= 1
Metoda momentu zastępczego [1]
Metoda momentu zastępczego może być stosowana wtedy, gdy moment obrotowy jest
proporcjonalny do prądu twornika. Warunek ten jest spełniony w silnikach obcowzbudnych
i bocznikowych prądu stałego, natomiast w silnikach indukcyjnych, najbardziej
rozpowszechnionych w układach napędowych jest w przybliżeniu proporcjonalny jedynie
w zakresie części roboczej charakterystyki mechanicznej. Przy założeniu, że moment
elektromagnetyczny
M = kI, moment zastępczy wyznaczamy z zależności:
(
)
0
3
2
1
2
2
3
2
3
2
2
2
1
2
1
2
...
...
t
t
t
t
t
t
t
t
M
t
M
t
M
t
M
t
M
t
M
M
n
h
r
h
h
n
n
r
r
z
⋅
+
+
+
+
+
+
+
⋅
+
⋅
+
+
⋅
+
⋅
+
⋅
+
⋅
=
β
α
Przy zastosowaniu metody momentu zastępczego niezbędna jest znajomość przebiegu
momentu obrotowego na wale silnika. Z katalogu dobieramy silnik, którego moment
znamionowy
M
N
jest nieznacznie większy od wyznaczonego momentu zastępczego
M
z
czyli
spełnia warunek:
M
N
≥ M
z
Moc znamionowa silnika wynosi:
P
N
=
M
N
ω
N
gdzie:
P
N
– moc znamionowa silnika, w W,
M
N
– moment znamionowy silnika, w N
⋅m];
ω
N
– prędkość znamionowa, w rad
⋅s
-1
.
Następnie należy jeszcze sprawdzić, czy dobrany silnik może rozwinąć moment
maksymalny o wartości umożliwiającej pokonanie największego obciążenia przewidywanego
w pracy, czyli czy jest spełniony warunek:
N
m
M
M
p
max
≥
gdzie:
M
max
– największy moment odczytany z wykresu obciążenia,
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
p
m
– przeciążalność silnika momentem podana w katalogu.
Jeżeli dobrany silnik nie spełnia warunku przeciążalności, wówczas dobieramy silnik
o większej mocy.
Jeżeli wykres
M = f(t) zawiera odcinek nierównoległy do osi czasu (rys. 18), wtedy we
wzorze na moment zastępczy dodajemy do licznika wyrażenie:
(
)
3
12
2
2
2
1
2
1
t
M
M
M
M
+
⋅
+
a do mianownika dodajemy
t
12
.
Rys. 18. Przykład przebiegu momentu nierównoległego do osi czasu
Przy przewietrzaniu obcym, czyli gdy
α
=
β
= 1 wzór na moment zastępczy dla
przykładu z rys. 18 przyjmuje postać:
(
)
0
2
12
1
2
2
2
12
2
2
2
1
2
1
1
2
1
3
t
t
t
t
t
M
t
M
M
M
M
t
M
M
z
+
+
+
⋅
+
+
⋅
+
+
⋅
=
Metodę momentu zastępczego stosuje się najczęściej dla silników indukcyjnych
pierścieniowych. Dla silników klatkowych tą metodę można stosować jedynie w zakresie
roboczej części charakterystyki, a więc nie obejmującej rozruchu i hamowania, Jeśli częstość
rozruchów jest niewielka (40
÷50/h) i warunki rozruchu nie są zbyt ciężkie, można pominąć
zwiększenie strat w silnikach klatkowych podczas rozruchu i hamowania i metodę
zastępczego momentu zastosować do cyklicznej pracy silnika klatkowego.
3. Dobór mocy silnika elektrycznego przy pracy dorywczej
Podczas pracy dorywczej okresy pracy silnika przeplatają się z okresami postojów,
podczas których silnik stygnie do temperatury otoczenia. W czasie pracy temperatura silnika
intensywnie rośnie, nie osiągając jednak wartości ustalonej.
Przy doborze silnika do pracy dorywczej musimy dysponować danymi odnośnie wartości
obciążenia dorywczego P
d
oraz czasu trwania pracy dorywczej t
d
. Zakładamy na początku
moc znamionową P
N
spełniającą warunek: P
N
=
α
P
d
, gdzie
α < 1. Następnie na podstawie
przebiegu Q = f(P) (zależności strat cieplnych od mocy obciążenia silnika) określamy straty
cieplne Q
N
przy obciążeniu znamionowym P
N
i straty podczas pracy dorywczej Q
d
przy
obciążeniu mocą P
d
. Wyznaczamy współczynnik przeciążalności cieplnej
N
d
Q
Q
=
γ
Jeżeli znana jest stała czasowa T
z
to obliczamy t
d
na podstawie zależności
1
ln
−
⋅
=
γ
γ
z
d
T
t
M
M
2
M
1
t
12
t
t
0
t
1
t
2
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
i porównujemy otrzymany wynik z uprzednio danym czasem pracy dorywczej. Jeżeli wynik
obliczeń jest niezgodny z podanym t
d
, to powtarzamy przeliczenia dla innej wartości mocy
znamionowej silnika P
N
. Po dobraniu mocy należy sprawdzić przeciążalność silnika, która
powinna spełnić warunek:
p
N
p
P
P
σ
max
=
gdzie: P
max
– największa wartość mocy jaką może być obciążony silnik podczas pracy,
σ
– współczynnik zapewniający niezawodną pracę silnika przy spadkach napięcia
w sieci, najczęściej
σ
= 0,75.
4. Dobór mocy silnika elektrycznego przy pracy przerywanej
Silnik elektryczny przystosowany do pracy przerywanej dobiera się, korzystając
z katalogu silników specjalnych, przewidywanych i zaprojektowanych do takiej właśnie
pracy. Najbardziej typowym przykładem pracy przerywanej jest praca urządzeń dźwigowych,
stąd silniki przeznaczone do pracy przerywanej nazywane są często silnikami dźwigowymi.
Silniki dźwigowe mają większą przeciążalność i większy moment rozruchowy niż silniki
konwencjonalne.
W katalogach silników przeznaczonych do pracy przerywanej podaje się moc
znamionową przy normalnych względnych czasach pracy: 15, 25, 40 i 60%. Moc
znamionowa silnika jest tym większa, im krótszy jest jego czas pracy:
P
N15
> P
N25
> P
N40
> P
N60
.
Za najbardziej typowy uważa się względny czas pracy 25%. Krajowe katalogi silników
przeznaczonych do pracy przerywanej podają moce znamionowe silnika przy względnych
czasach pracy 25 i 40%.
5. Dobór mocy silnika elektrycznego zasilanego z przekształtnika
Silniki elektryczne w napędach energoelektronicznych są zasilane napięciem i prądem
odkształconym, co jest przyczyną występowania dodatkowych strat, powodujących większe
nagrzewanie silnika. Aby zapobiec przegrzaniu silnika, należy obciążyć go mniejszą mocą od
podanej w katalogu:
– dla silników prądu przemiennego przy zasilaniu napięciem sinusoidalnym,
– dla silników prądu stałego przy zasilaniu napięciem stałym.
Obecnie produkowane silniki prądu stałego w większości przypadków nie wymagają
stosowania współczynników korygujących ich moc znamionową przy zasilaniu
z przekształtników trójfazowych mostkowych. W przypadku zasilania z przekształtników
jednofazowych z pulsacją 100 Hz wymagają zastosowania dławików wygładzających lub
obniżenia mocy obciążenia.
B. Dobór momentu rozruchowego i prędkości obrotowej silnika
Moment obrotowy rozwijany przez silnik powinien pokonywać statyczny moment
obciążenia sprowadzony do wału silnika oraz wytwarzać potrzebne do zmiany prędkości
przyśpieszenie. Statyczny moment obciążenia określają momenty niezbędne do pokonania sił
tarcia oraz moment mechaniczny przyłożony do wału silnika. Gdy zmienia się prędkość
obrotowa silnika, pojawia się moment dynamiczny, który zależy od bezwładności mas układu
ruchomego. W przypadku pracy ciągłej moment silnika dobiera się na podstawie obliczonego

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
lub oszacowanego zapotrzebowania. Moment rozruchowy silnika powinien być większy od
momentu oporowego M
o
maszyny roboczej podczas całego czasu rozruchu. Przy doborze
początkowego moment rozruchowego należy uwzględnić opory statyczne związane
z
nadaniem maszynie roboczej prędkości początkowej. Przyjmuje się, że wartość
początkowego momentu rozruchowego powinna wynosić 1,2 M
o
[1]. Mniejsza wartość
początkowego momentu rozruchowego może być nie wystarczająca do uruchomienia silnika.
Chcąc aby rozruch przebiegał płynnie, z jednakowym przyśpieszeniem, należy zapewnić
możliwie stałą wartość momentu dynamicznego w okresie rozruchu. W
układach
napędowych, gdzie jest wymagany niewielki początkowy moment rozruchowy, należy dobrać
poprawnie sposób rozruchu i zastosować odpowiednie urządzenia rozruchowe.
Przy pracy przerywanej istotną rolę odgrywa moment bezwładności elementów
ruchowych układu napędowego. Jeśli bezwładność elementów ruchowych maszyny roboczej
jest pomijalna w porównaniu z bezwładnością silnika, to praktycznie dobieramy silnik tak jak
do pracy ciągłej, a więc wystarczający jest moment silnika wybranego z katalogu na
podstawie obliczonego zapotrzebowania na moc. W przypadku, gdy bezwładność elementów
ruchowych maszyny jest znaczna w porównaniu z bezwładnością silnika, moment silnika
należy skorygować tak, aby uzyskane przyśpieszenie nie było zbyt małe. W tym celu należy
obliczyć czas rozruchu t
r
dla wyznaczonego momentu rozruchowego silnika M
s
d
z
o
s
z
r
M
J
M
M
J
t
ω
ω
∆
=
−
∆
=
i porównać wynik obliczeń z orientacyjnym czasem rozruchu.
Prędkość znamionowa silnika napędowego powinna być dostosowana do prędkości
maszyny roboczej, aby uniknąć przekładni pośredniczących, które wpływają na obniżenie
sprawności układu napędowego. Dobór silnika napędowego o prędkości znamionowej
zbliżonej do prędkości maszyny roboczej jest możliwy w przypadku maszyn roboczych
o dużych wartościach prędkości roboczej (wentylatory, pompy odśrodkowe, szlifierki). Do
napędu maszyn wolnoobrotowych można zastosować drogie silniki wolnoobrotowe, aby
uniknąć również dość drogich przekładni, jeśli ekonomicznie jest to uzasadnione. Najczęściej,
przy niewielkiej redukcji prędkości, stosuje się przekładnie dopasowujące prędkość silnika do
prędkości maszyny roboczej.
C. Rodzaju budowy i formy wykonania silnika
Rodzaj budowy i stopień ochrony zalicza się do danych znamionowych maszyny, które
muszą być podane na tabliczce znamionowej.
W celu zapewnienia bezpieczeństwa obsługi i bezawaryjnej pracy maszyny elektrycznej
budowa maszyn elektrycznych musi być dostosowana do warunków otoczenia. Ochronę
przed przedostaniem się do wnętrza maszyny ciał stałych, pyłów, cieczy i gazów oraz przed
wydostaniem się z maszyny ciepła, produktów spalania oraz wyładowań elektrycznych, gdy
maszyna pracuje w atmosferze pyłów i gazów grożących wybuchem, powinna zapewniać
osłona maszyny. Osłona maszyny również uniemożliwia dotknięcie ręką części wirujących
bądź będących pod napięciem. Pojęcie „rodzaj budowy” wprowadzono dla ułatwienia oceny
cech konstrukcyjnych, zapewniających spełnienie określonych przez przepisy wymagań
dotyczących ochrony wnętrza maszyny jak i zabezpieczenia obsługi przed dotknięciem
wnętrza.
Stosowane rodzaje budowy maszyn elektrycznych i odpowiadające im oznaczenia literowe:
– otwarta
–
A
– chroniona
–
B

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
– okapturzona
–
C
– zamknięta
–
Z
– wodoszczelna
–
W
– głębinowa
–
G
Każdy z rodzajów budowy charakteryzuje się określonym stopniem ochrony. Stopień
ochrony oznacza się symbolem literowym IP oraz cyframi arabskimi, z których pierwsza
określa stopień ochrony obsługi przed dotknięciem lub zbliżeniem się do nieizolowanych
części oraz przed przedostaniem się obcych ciał stałych, natomiast druga określa stopień
ochrony przed przedostaniem się wody.
Przykładowe rodzaje budowy i odpowiadające im stopnie ochrony:
– budowa otwarta – IP00 i IP10
– budowa chroniona – IP12 i IP22
– budowa okapturzona – IP23 i IP33
– budowa zamknięta – np. IP44, IP55, IP56
– budowa wodoszczelna – IP56 i IP57
– budowa głębinowa – IP67 i IP68.
Wymagania stawiane obudowom maszyn i urządzeń elektrycznych są zawarte w Polskiej
Normie : PN-88/E-06705.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do zaplanowania
przebiegu ćwiczeń i ich wykonania.
1. Jakie dwa podstawowe warunki należy uwzględnić dobierając moc znamionową silnika
napędowego?
2. Z jakiej zależności dobieramy moc znamionową silnika przy sprzężeniu bezpośrednim
maszyny roboczej pracującej ze stałą prędkością
ω
o
?
3. Co należy uwzględnić, jeśli silnik napędza maszynę roboczą przez przekładnię?
4. Jak dobieramy moc, jeśli silnik obciążony jest siłą oporową maszyny roboczej?
5. Jakie dodatkowe czynniki wpływające na zwiększenie mocy zapotrzebowanej należy
również uwzględnić, dobierając moc znamionową silnika?
6. Która z metod doboru mocy silnika napędowego przy obciążeniu zmiennym jest
najdokładniejsza?
7. Które metody doboru mocy silnika są częściej stosowane w praktyce i dlaczego?
8. Na czym polega metoda prądu zastępczego?
9. Jaki warunek powinien spełniać prąd znamionowy silnika dobranego z katalogu?
10. Jakie parametry dla dobranego silnika należy jeszcze sprawdzić i kiedy wprowadzić
korektę mocy?
11. Kiedy może być stosowana metoda momentu zastępczego?
12. W jaki sposób w doborze silnika uwzględniamy ewentualne pogorszenie warunków
chłodzenia podczas rozruchu, hamowania i postoju?
13. Jak dobiera się moment silnika w przypadku pracy ciągłej?
14. Co należy uwzględnić przy doborze początkowego momentu rozruchowego?
15. Jakie warunki należy zapewnić, aby rozruch przebiegał płynnie?
16. Jak dobieramy prędkość znamionową silnika napędowego ?
17. W jakim celu wprowadzono pojęcie: rodzaj budowy maszyny elektrycznej?
18. Co określa stopień ochrony i jakim symbolem oznacza się go na tabliczce znamionowej?
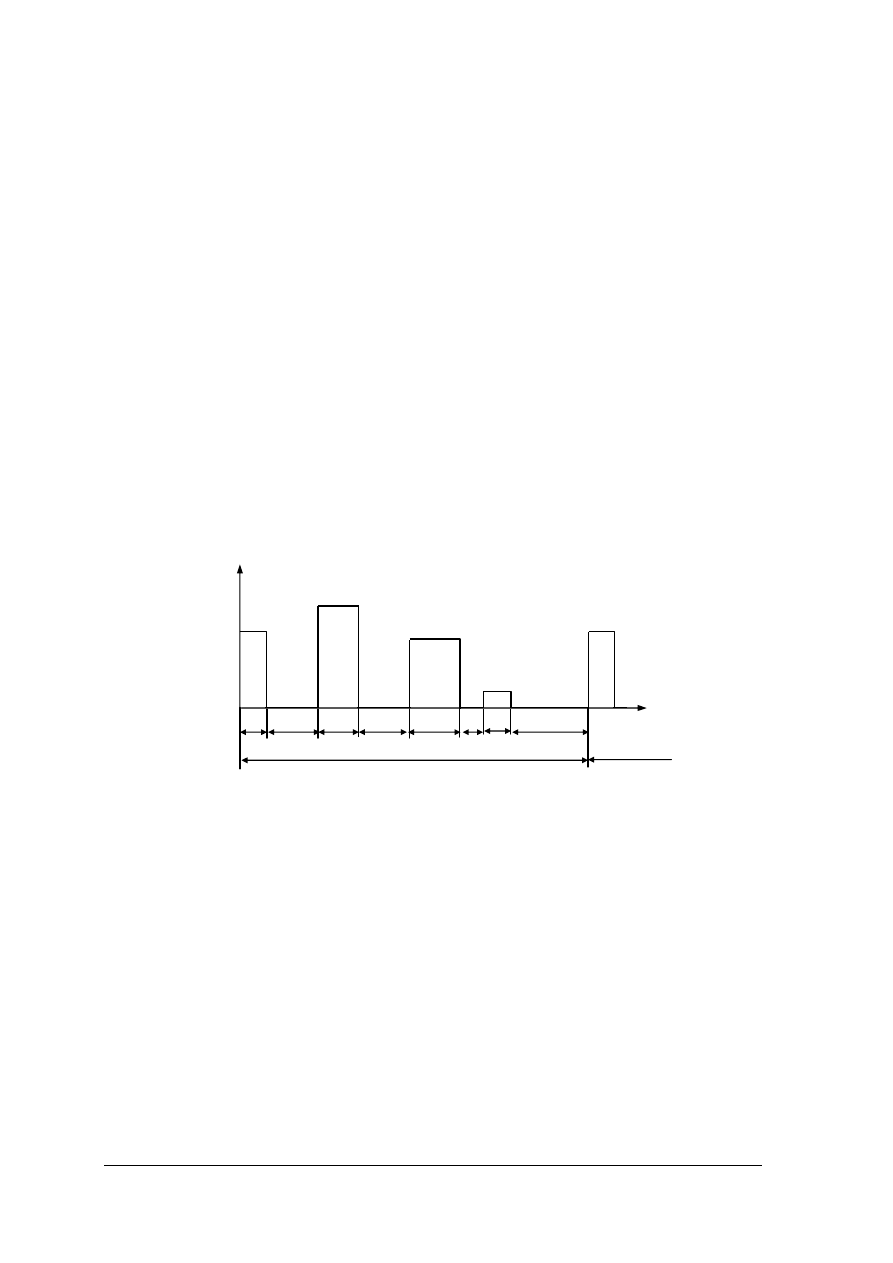
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.4.3. Ćwiczenia
Ćwiczenie 1
Dobrać moc silnika napędowego do pracy ciągłej, napędzającego bęben taśmociągu za
pośrednictwem przekładni pasowych o sprawności
η
p
= 0,95 z prędkością
υ
o
= 1,4 m
⋅s
-1
.Siła
oporowa na obwodzie bębna F
o
= 4 kN.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapisać wzór na moc zapotrzebowaną przy obciążeniu siłą oporową,
2) podstawić wartości liczbowe i wyznaczyć moc.
Wyposażenie stanowiska pracy:
− kalkulator,
− arkusze papieru formatu A4,
Ćwiczenie 2
Dobrać silnik do napędu maszyny roboczej pracującej ze stałą prędkością kątową
ω
= 100 rad
⋅s
-1
, której wykres momentu obciążenia przedstawia rysunek.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wyznaczyć czas trwania cyklu, który przy pracy okresowej S3 nie powinien przekroczyć
10 minut,
2) obliczyć moment zastępczy, który wyznaczamy przy pracy okresowej S3 bez
uwzględnienia czasów postoju i biegu jałowego,
3) wyznaczyć względny czas pracy silnika
ε
,
4) obliczyć moc zapotrzebowaną do napędu maszyny roboczej,
5) przeliczyć moc zapotrzebowaną dla znormalizowanego względnego czasu pracy,
6) korzystając z katalogu dobrać silnik spełniający wymagania,
7) sprawdzić, czy przeciążalność silnika spełnia wymagania układu napędowego
z uwzględnieniem 10% spadku napięcia w sieci.
Wyposażenie stanowiska pracy:
− kalkulator,
− katalogi silników elektrycznych,
− arkusze papieru formatu A4.
[N
⋅
m]
120 -
100 -
80 -
60 -
40 -
20 -
0 -
II cykl pracy
I cykl pracy
t
M
20
60
90
60
40
60
30 30
[s]
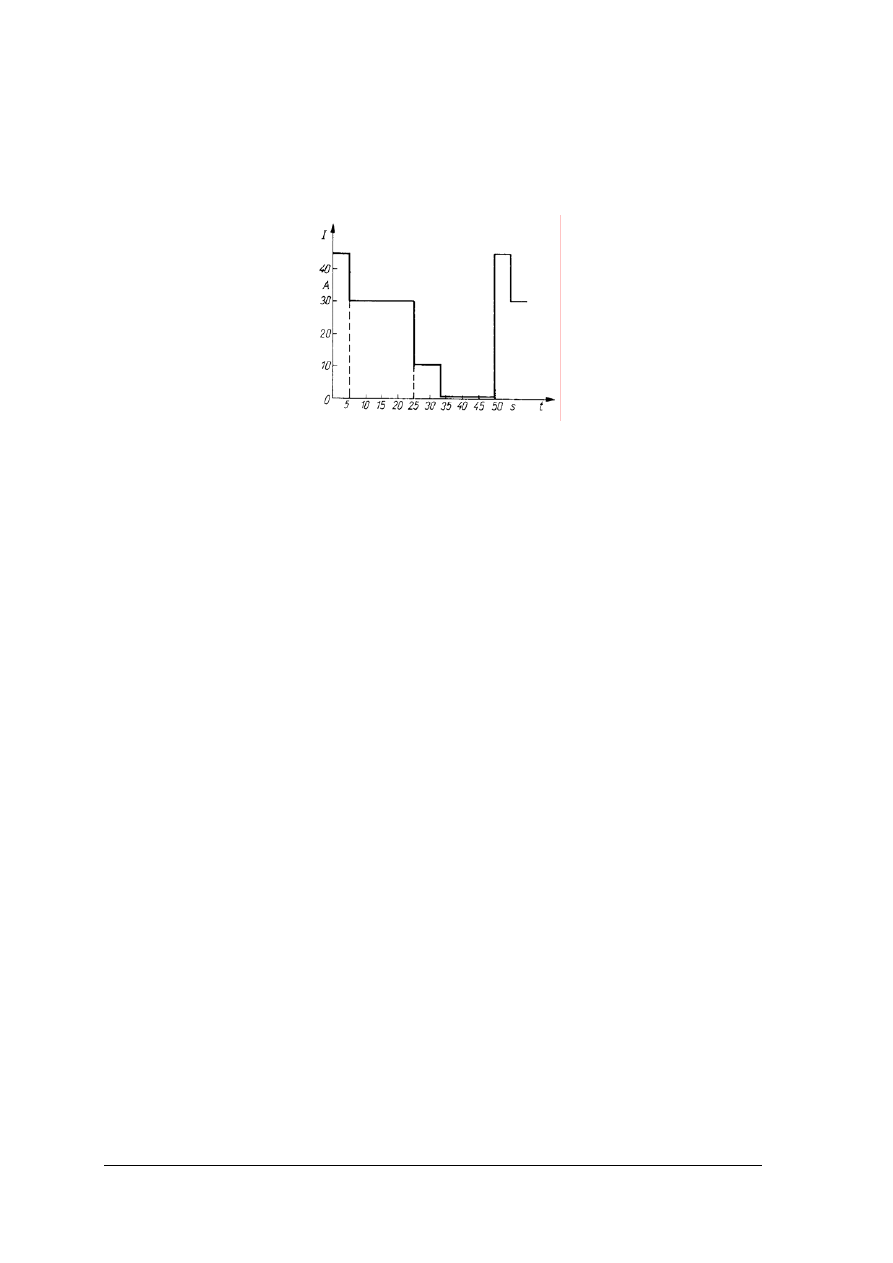
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Ćwiczenie 3
Do napędu obrabiarki ma być zastosowany silnik bocznikowy prądu stałego.
Przewidywany przebieg obciążenia obrabiarki przedstawia rysunek. Silnik ma przewietrzanie
obce. Wyznaczyć prąd zastępczy.[1]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić czas trwania cyklu, czy nie przekracza 10 minut,
2) zapisać wzór na prąd zastępczy dla przykładu na rysunku,
3) podstawić dane liczbowe i wyznaczyć wartość prądu zastępczego,
4) dobrać z katalogu silnik o prądzie znamionowym odpowiadającym wyznaczonej
wartości,
5) sprawdzić, czy przeciążalność prądowa wybranego silnika spełnia wymagania układu
napędowego,
6) jeżeli silnik wybrany według warunków nagrzewania nie spełnia wymagań
przeciążalności prądowej, to należy wybrać silnik o większej mocy spełniający warunek
przeciążalności.
Wyposażenie stanowiska pracy:
− katalogi silników elektrycznych
− kalkulator.
4.4.4. Sprawdzian postępów
Czy
potrafisz:
Tak Nie
1) zdefiniować dwa podstawowe warunki jakie należy uwzględnić
dobierając moc znamionową silnika napędowego?
2) określić co należy uwzględnić jeśli silnik napędza maszynę
roboczą przez przekładnię?
3) obliczyć moc zapotrzebowaną gdy silnika obciążony jest siłą
oporową maszyny roboczej?
4) obliczyć prąd zastępczy, uwzględniając warunki pracy silnika?
5) dobrać silnik ze względu na nagrzewanie?
6) uwzględnić dodatkowe czynniki, wprowadzić korektę mocy?
7) ocenić, czy przy doborze silnika może być stosowana metoda
momentu zastępczego?
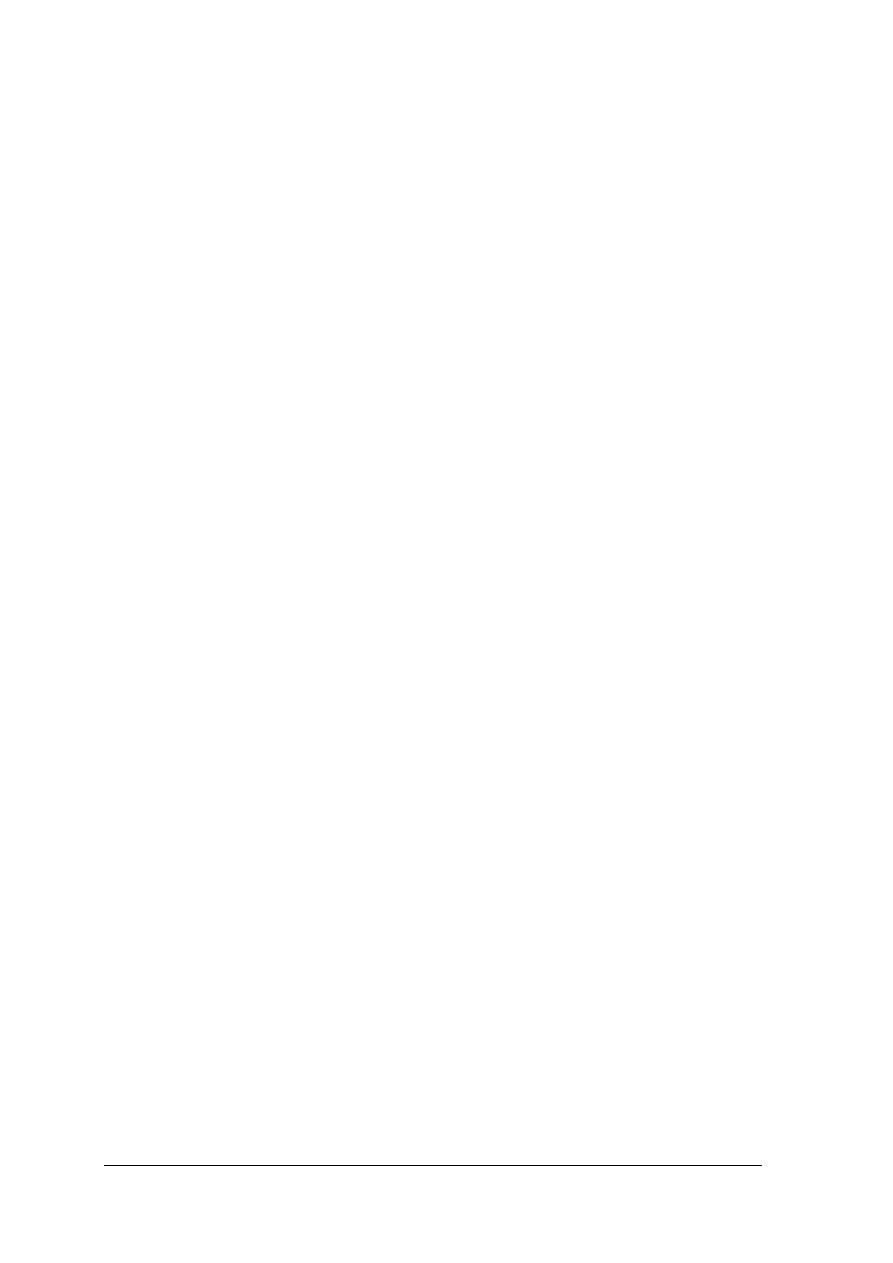
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
8) dobrać moment silnika w przypadku pracy ciągłej?
9) uwzględnić dodatkowe czynniki przy doborze początkowego
moment rozruchowego?
10) określić jakie warunki należy zapewnić, aby rozruch przebiegał
płynnie?
11) zdefiniować stopień ochrony i podać jakim symbolem oznacza się
go na tabliczce znamionowej?
12) określić znaczenie pierwszej i drugiej cyfry stopnia ochrony?
13) dobrać silnik elektryczny do maszyny roboczej z uwzględnieniem
warunków pracy?

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję i zapoznaj się z zestawem zadań testowych. Masz na to 5
minut. Jeżeli masz wątpliwości zapytaj nauczyciela.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Twoje zadanie polega na poprawnym rozwiązaniu 20 zadań o różnym poziomie
trudności: zadania od 1 do 13 są zadaniami z zakresu poziomu podstawowego, a zadania
od 14 do 20 to poziom ponadpodstawowy.
4. Za poprawne rozwiązanie 12 zadań z poziomu podstawowego (1
÷ 13) otrzymasz ocenę
dostateczną. Aby otrzymać ocenę dopuszczającą, powinieneś rozwiązać co najmniej
8 zadań z poziomu podstawowego.
5. Za poprawne rozwiązanie 16 zadań (w tym minimum 12 z poziomu podstawowego)
otrzymasz ocenę dobrą.
6. Za prawidłowe rozwiązanie 19 zadań otrzymasz ocenę bardzo dobrą.
7. Zaznacz poprawną odpowiedź zaczerniając właściwe pole w karcie odpowiedzi.
8. W przypadku zmiany decyzji dotyczącej wyboru odpowiedzi, poprzednio zaznaczoną
odpowiedź zakreśl kółkiem i zaznacz ponownie właściwą odpowiedź.
9. Rozwiązanie zadania będzie uznane za prawidłowe, jeżeli wybierzesz tylko jedną
poprawną odpowiedź, uzyskasz wówczas jeden punkt.
10. Wybranie kilku odpowiedzi lub brak odpowiedzi spowoduje nie zaliczenie zadania,
wówczas uzyskasz 0 punktów.
11. Na rozwiązanie zadań masz 35 minut.
12. Jeżeli czas pozwoli, przed oddaniem pracy, sprawdź odpowiedzi, jakich udzieliłeś.
Powodzenia!
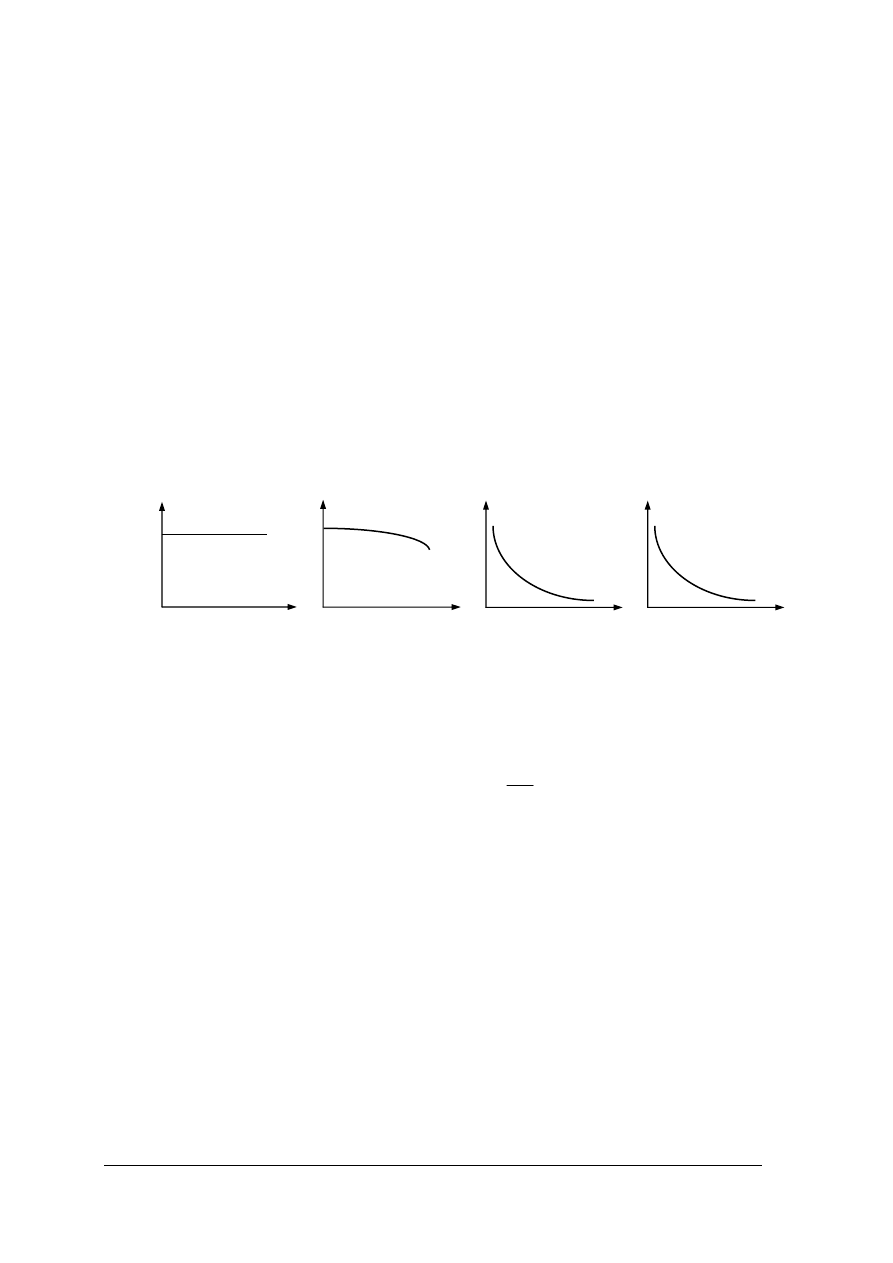
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
ZESTAW ZADAŃ TESTOWYCH
1. Napędem elektrycznym nazywamy:
a) urządzenie elektryczne, w którym doprowadzona energia elektryczna przetwarzana
jest na energię mechaniczną wirującego wału,
b) zespół urządzeń i aparatów elektrycznych pracujących na zasadzie wykorzystania
energii elektrycznej i służących do nadawania ruchu maszynie roboczej,
c) zespół urządzeń i aparatów elektrycznych służących do sterowania przepływem
energii elektrycznej między źródłem a maszyną napędzającą,
d) układ napędowy, w którym do sterowania przepływem energii między źródłem
a silnikiem wykorzystano półprzewodnikowe przyrządy mocy;
2. Charakterystykę idealnie sztywną mają silniki:
a) indukcyjne,
b) bocznikowe prądu stałego,
c) komutatorowe szeregowe prądu przemiennego,
d) synchroniczne.
3. Charakterystykę mechaniczną silnika szeregowego przedstawia rysunek:
4. Moc mechaniczną P przenoszoną z silnika do maszyny roboczej w ruchu obrotowym
opisuje zależność:
a) P = F
o
υ
o
,
b) P = M
o
ω
o
,
c) P = M
s
ω
s
,
d) P = U I.
5. Z równania ruchu układu elektromechanicznego
s
o
M
M
t
J
=
+
∆
∆
ω
wynika, że:
a) rozruch trwa do chwili, w której przyśpieszenie kątowe zmaleje do zera,
b) układ wiruje ze stałą prędkością kątową równą
ω
,
c) moment hamujący jest zbyt duży by nastąpił rozruch,
d) układ napędowy pracuje niestabilnie i grozi rozbieganiem.
6. Moment dynamiczny M
d
jest to:
a) moment oporowy, którego zwrot zależy od kierunku ruchu mechanizmu,
b) inercja ciała wirującego wokół osi,
c) nadwyżka momentu powodująca zmianę prędkości kątowej układu napędowego,
d) moment oporowy, którego zwrot nie zależy od kierunku ruchu mechanizmu.
7. Moment bezwładności J określa:
a) nadwyżkę momentu powodującą zmianę prędkości kątowej układu napędowego,
b) moment napędowy niezbędny do wprawienia w ruch maszyny roboczej,
c) moment oporowy, którego zwrot nie zależy od kierunku ruchu mechanizmu,
d) inercję ciała wirującego wokół osi.
M
ω
a)
M
ω
b)
ω
M
c)
M
ω
d)
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
8. Dla układów o stałym momencie bezwładności moment dynamiczny obliczamy
z zależności:
a) J = m R
b
2
,
b) M
d
= c
e
Φ
I
a
,
c) a =
t
∆
∆
ω
,
d)
t
J
M
d
∆
∆
=
ω
.
9. W celu ustalenia czy dobrany silnik może rozwinąć moment maksymalny wystarczający
do pokonania największego obciążenia przewidzianego podczas pracy układu
napędowego, sprawdzamy, czy spełniony jest warunek:
a) p
m
= M
N
M
k
,
b)
,
max
M
M
p
N
m
=
c)
,
max
N
m
M
M
p
=
d)
.
sN
oN
p
P
P
p
=
10. Praca z obciążeniem o stałej wartości, trwającym przez czas określony tak, że żadna
z części silnika nie osiągnie temperatury ustalonej z następującym po tym czasie
postojem, podczas którego każda z części silnika osiągnie temperaturę nie różniącą się od
temperatury otoczenia więcej niż o 2
o
C, jest to:
a) praca ciągła,
b) praca dorywcza,
c) praca przerywana okresowa,
d) praca długotrwała z przerwami jałowymi.
11. Rysunek przedstawia wykresy pracy:
a) obciążenia zmiennego,
b) dorywczej,
c) okresowej przerywanej,
d) ciągłej.
12. Oblicz moment krytyczny silnika o przeciążalności p
m
= 2,2 i momencie znamionowym
M
N
= 95 Nm:
a) M
max
= 43,2 N
⋅m,
b) M
max
= 209 N
⋅m,
c) M
max
= 140 N
⋅m,
d) M
max
= 95 N
⋅m.
13. Oblicz moc znamionową silnika napędowego do pracy ciągłej, napędzającego maszynę
roboczą z prędkością
ω
o
= 126 rad
⋅s
-1
. przy sprzężeniu bezpośrednim. Moment oporowy
maszyny roboczej M
o
=70 N
⋅m:
a) nie mniejsza niż 8,82 kW,
b) nie większa niż 1,8 kW,
c) powyżej 1,8 kW,
d) nie większa niż 8,82 kW.
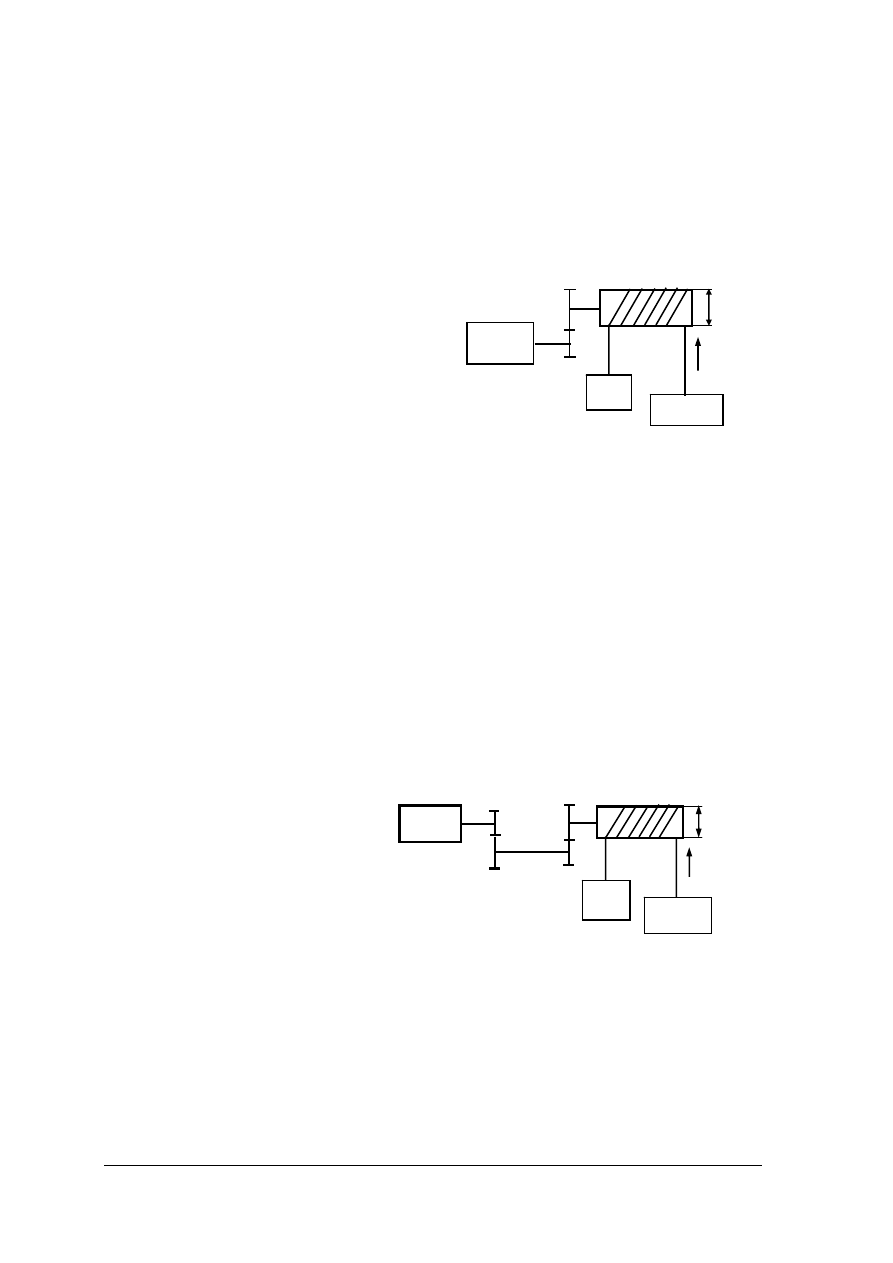
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
14. Podany na tabliczce znamionowej stopień ochrony IP44 oznacza, że silnik ma budowę:
a) otwartą,
b) chronioną,
c) zamkniętą,
d) wodoszczelną.
15. Oblicz zastępczy moment bezwładności dla układu przedstawionego na rysunku, mając
dane:
G = 60 kN,
G
p
=20 kN,
D
b
= 0,6 m,
J
s
= 3,5 kg
⋅m
2
,
J
b
= 7,5 kg
⋅m
2
,
J
1
= 0,1 kg
⋅m
2
,
J
2
= 1,5 kg
⋅m
2
,
i = 10,
ω
s
=100 rad
⋅s
-1
,
υ
o
= 3 m
⋅s
-1
,
a) J
z
= 11,03 kg
⋅m
2
,
b) J
z
= 248,34 kg
⋅m
2
,
c) J
z
= 12,60 kg
⋅m
2
,
d) J
z
= 14,03 kg
⋅m
2
.
16. Oceń możliwość zastosowania silnika o podanej na tabliczce znamionowej informacji
P
N
= 10 kW S3 25% do pracy przerywanej S3 40%:
a) nie można zastosować silnika do pracy o innym czasie względnym,
b) można zastosować przy obciążeniu mocą 7,9 kW,
c) można zastosować przy obciążeniu mocą 4 kW,
d) można zastosować przy obciążeniu mocą 6,25 kW.
17. Wyznaczyć moment zastępczy przy podnoszeniu kabiny dźwigu bez ładunku.
Dane układu napędowego:
G
k
=4 kN,
G = 11 kN,
G
p
= 8 kN,
υ
o
= 2,0 m/s,
ω
s
= 100 rad/s,
η
1
=
η
2
= 0,95,
η
b
= 0,96.
Moment bezwładności bębna i przekładni pominąć.
a) M
z
= 92,3 N
⋅m,
b) M
z
= 173,3 kN
⋅m,
c) M
z
= – 69,3 N
⋅m,
d) M
z
= – 230,8 kN
⋅m.
S
M
s
,
ω
s
,
η
s
, J
s
J
1
i
η
p
G
G
p
F
o
,
υ
o
υ
o
η
b
, J
b
MR
D
J
2
S
G+G
k
G
p
η
b
MR
D
i
1
,
η
1
i
2
,
η
2
p
M
s
,
ω
s
υ
o
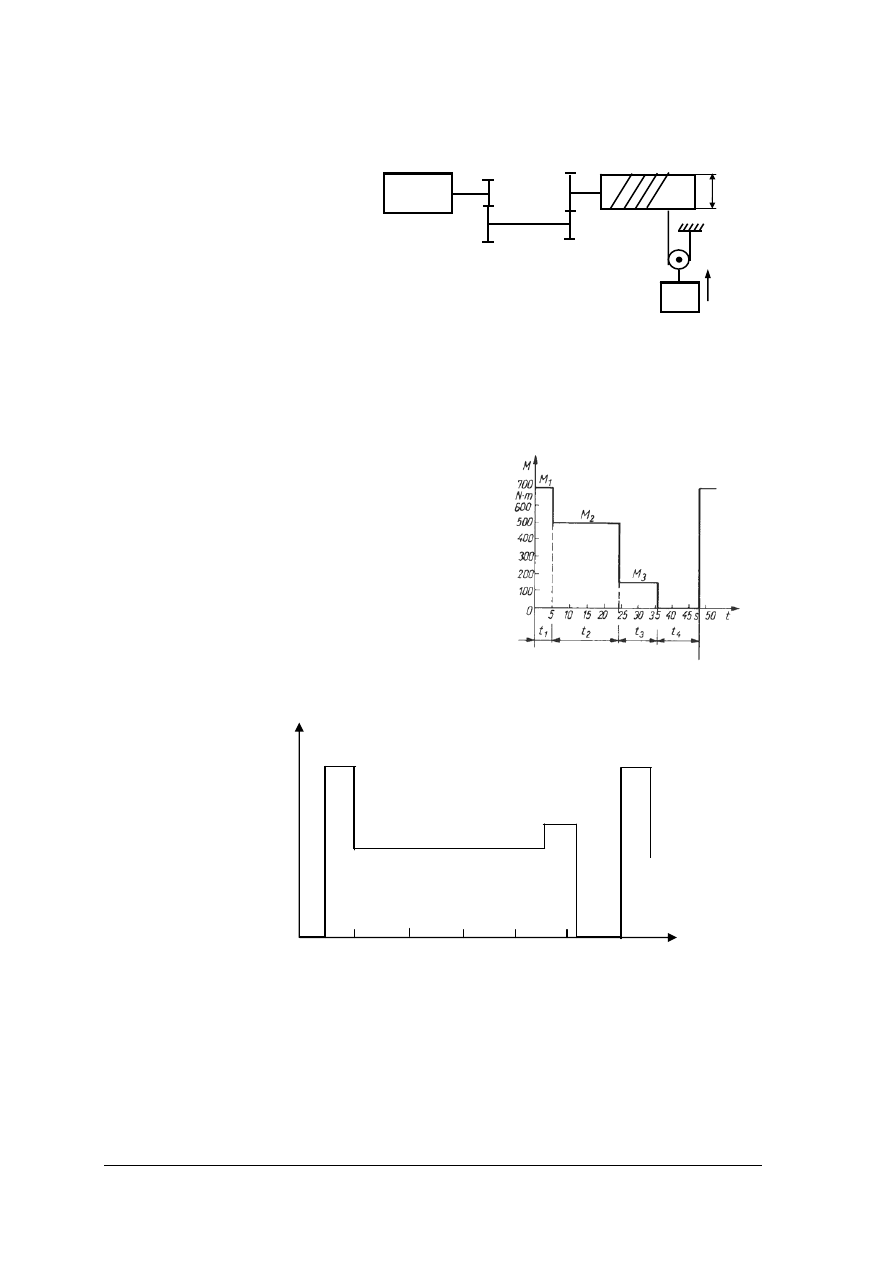
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
18. Wyznaczyć moment zastępczy przy podnoszeniu ładunku mając dane:
G = 12 kN,
υ
o
= 2 m/s,
ω
s
= 102,6 rad/s,
η
1
=
η
1
= 0,97,
η
b
= 0,96.
Moment bezwładności bębna
i przekładni pominąć.
a) M
z
= 121,8 N
⋅m,
b) M
z
= 117,0 N
⋅m,
c) M
z
= 105,6 N
⋅m,
d) M
z
= 129,5 N
⋅m.
19. Oblicz metodą momentu zastępczego moc zapotrzebowaną silnika napędowego
pracującego według cyklicznie zmieniającego się momentu jak na rysunku. Prędkość
obrotowa maszyny roboczej
ω
o
= 100 rad/s:
a) P = 3,38 kW,
b) P = 33,8 kW,
c) P = 31,2 kW,
d) P = 338 W.
20. Dobierz silnik do maszyny roboczej o obciążalności jak na rysunku. Dopuszczalna
przeciążalność silnika o przewietrzaniu obcym, wg danych katalogowych p
i
=1,6:
a) I
z
= 53,5 A, I
sN
≥ 62,5 A,
b) I
z
= 53,5 A, I
sN
≤ 62,5 A,
c) I
z
= 53,5 A, I
sN
≥ 85,3 A,
d) I
z
= 32,5 A, I
sN
≥ 52 A.
i
1
i
2
MR
M
s
,
ω
s
p F = 0,5 G F = 0,5 G
υ
o
S
G
D
t
I
[A]
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 -
0 -
10
20
30
40
50
60 s
„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
KARTA ODPOWIEDZI
Imię i nazwisko ……………………………………………………………………………
Dobieranie silników elektrycznych w układach napędowych.
Zaznacz poprawną odpowiedź zaczerniając odpowiednie pole w karcie odpowiedzi.
Nr zadania
Odpowiedź
Punktacja
1. a b c d
2. a b c d
3. a b c d
4. a b c d
5. a b c d
6. a b c d
7. a b c d
8. a b c d
9. a b c d
10. a b c d
11. a b c d
12. a b c d
13. a b c d
14. a b c d
15. a b c d
16. a b c d
17. a b c d
18. a b c d
19. a b c d
20. a b c d
Razem:

„
Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
6. LITERATURA
1. S. Januszewski, A. Pytlak, M. Rosnowska-Nowaczyk, H. Świątek – „Napęd elektryczny”
WSiP Warszawa 1994r
2. Z. Stein – „Maszyny i napęd elektryczny”, WSiP Warszawa 1989r
3. E. Goźlińska – „Maszyny elektryczne”, WSiP Warszawa 1998r
4. S. Januszewski, A. Pytlak, M. Rosnowska-Nowaczyk, H. Świątek – „Energoelektronika”
WSiP Warszawa 2004r
Wyszukiwarka
Podobne podstrony:
Pomiary wielkości elektrycznych w układach napędowych pojazdów
dudziński,układy napędowe,Charakterystyki mechaniczne silników elektrycznych
Napędy elektryczne układy napędowe z silnikami prądu przemiennego
Napędy i silniki elektryczne
Rodzaje pracy silników elektrycznych, 04. 01. ELECTRICAL, 07. Elektryka publikacje, 07. Electrical M
Ankieta techniczna dotycząca szczotek, Katalogi materiałów eksploatacyjne silników elektrycznych
Dobieranie materiałów stosowanych w układach konstrukcyjnych pojazdów samochodowych
Zmiana kierunku pracy silnika elektrycznego
silnik elekt sprawdzenie, SILNIKI ELEKTRYCZNE
Silnikkrok, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Układy sterowania silnikami elektrycznymi
silnik, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Zabezpieczenia silników elektrycznych za pomocą zespołu autom, SPRAWOZDANIA czyjeś
Regulacja prędkości kątowej silników indukcyjnych w układach kaskadowych – kaskada stałomomentowax
Silniki elektryczne
silnik elektryczny, Zamiana jednego rodzaju energii na inny interesowała ludzi już od bardzo dawna
więcej podobnych podstron