POLITECHNIKA
WROCŁAWSKA
ZAKŁAD OBRABIAREK I SYSTEMÓW
MECHATRONICZNYCH
Wykonujący sprawozdanie:
1. Adam Wołosiański
Wydział: Mechaniczny
Rok studiów: 3
Rok Akademicki : 2013/2014
Termin: PN TP 13
15
- 15
00
LABORATORIUM PODSTAW PRZETWARZANIA SYGNAŁÓW
Data wykonania ćwiczenia:
14.10.2013
Nr ćwiczenia:
1, 2
Temat:
Analiza sygnałów pochodzących z różnych czujników,
wykorzystanie wykresów widma FFT.
Data oddania sprawozdania:
29.10.2013
Prowadzący:
Dr inż. Andrzej Roszkowski
1. Cel ćwiczenia
Zapoznanie się z działaniem określonych czujników pomiarowych. Wykonanie pomiarów czujnikami przemieszczenia,
prędkości i przyspieszenia. Prezentacja sygnałów oraz ich odpowiednia obróbka.
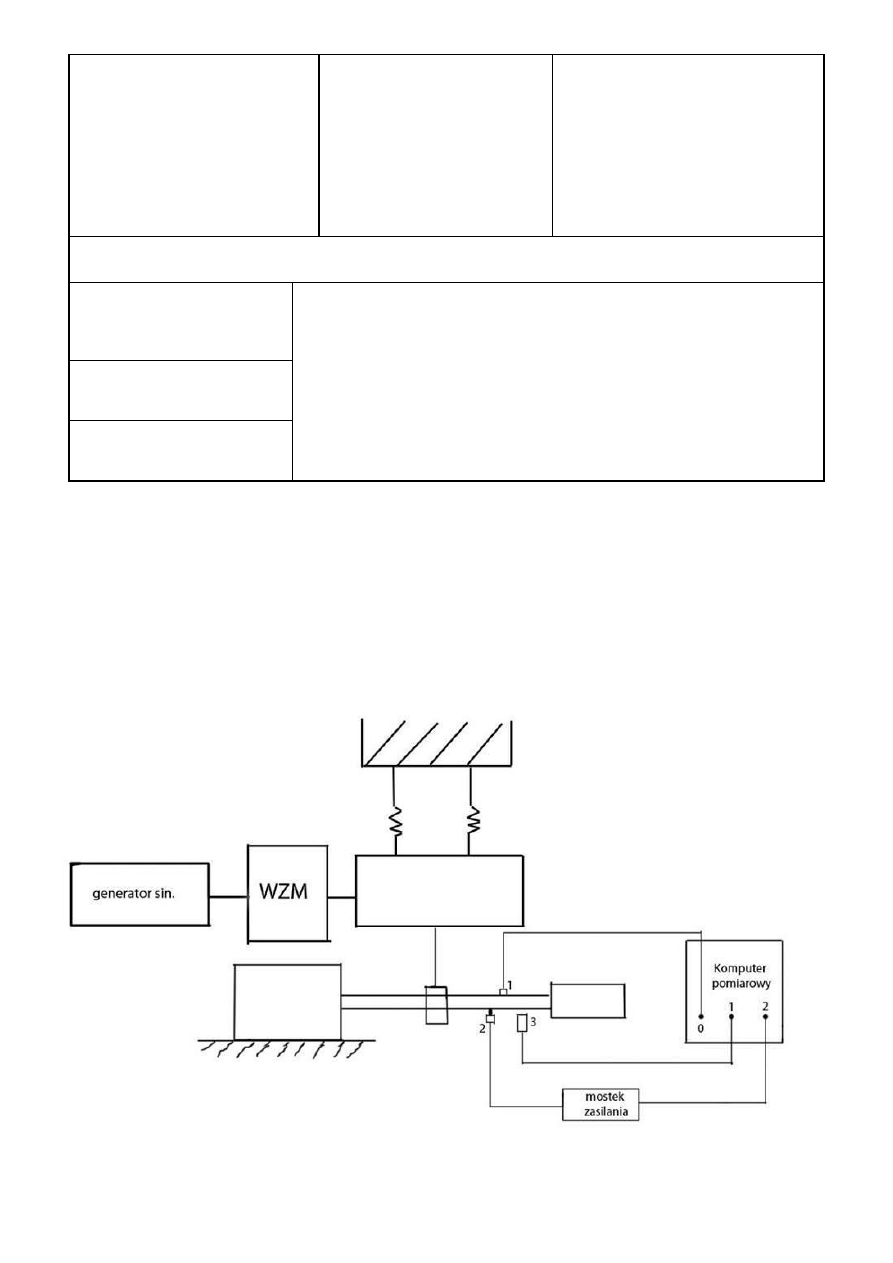
2. Schemat
Rys. nr 1 – schemat pomiarowy
1 -
Piezoelektryczny czujnik przyspieszenia
2 - Indukcyjny czujnik przemieszczenia
3 – Indukcyjny czujnik prędkości
3. Wyznaczenie stałych dla czujnika przemieszczenia i przyspieszenia
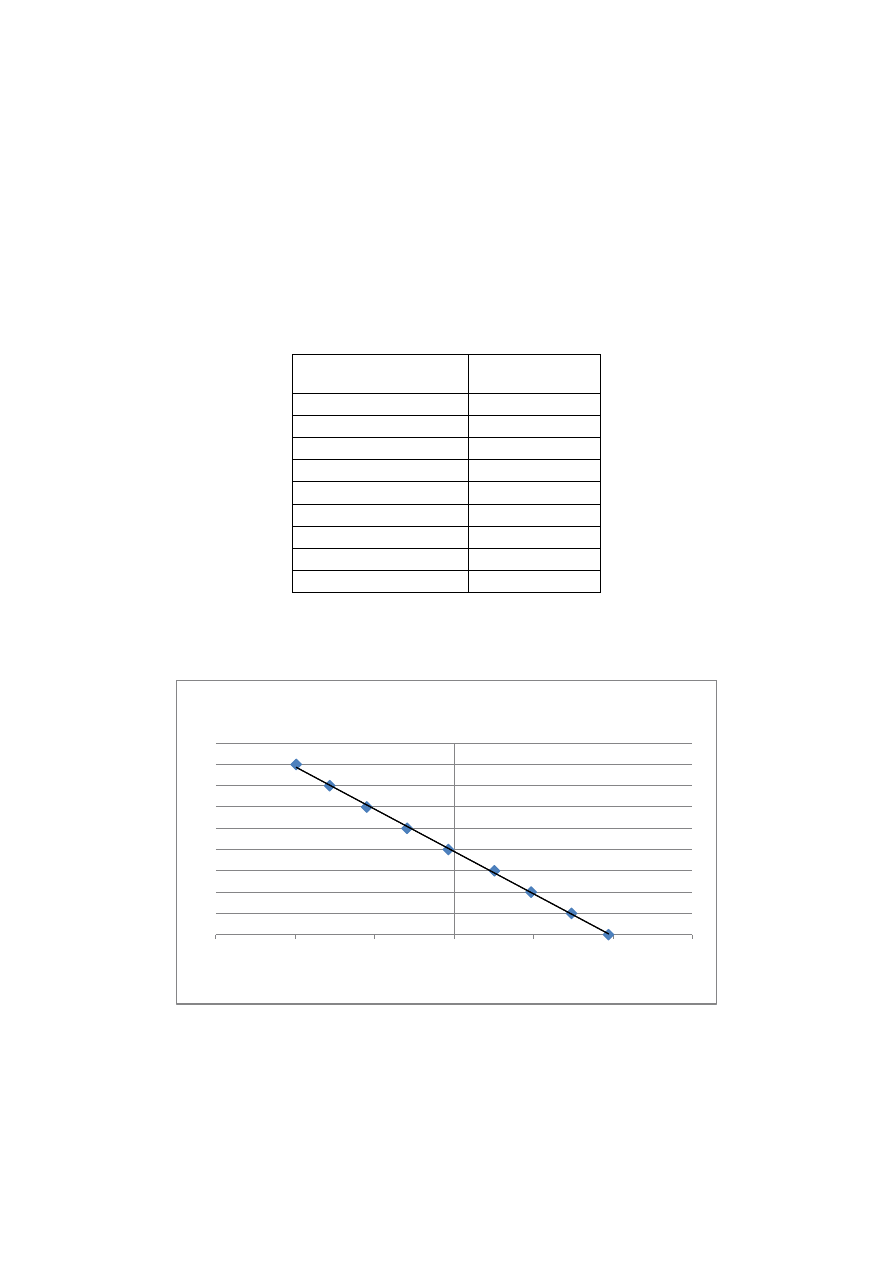
Kalibracja czujnika przemieszczenia:
Stała czujnika przemieszczenia wynosi a=-0,1992 oraz b=1,9538 .
y = -0,1992x + 1,9538
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
-15
-10
-5
0
5
10
15
Pr
ze
m
ie
szcz
n
ie
[
m
m
]
Napięcie [V]
Stał czujnika
Przemieszczenie
[mm]
Napięcie[V]
0
9,72
0,5
7,39
1
4,85
1,5
2,54
2
-0,36
2,5
-2,96
3
-5,5
3,5
-7,83
4
-9,94
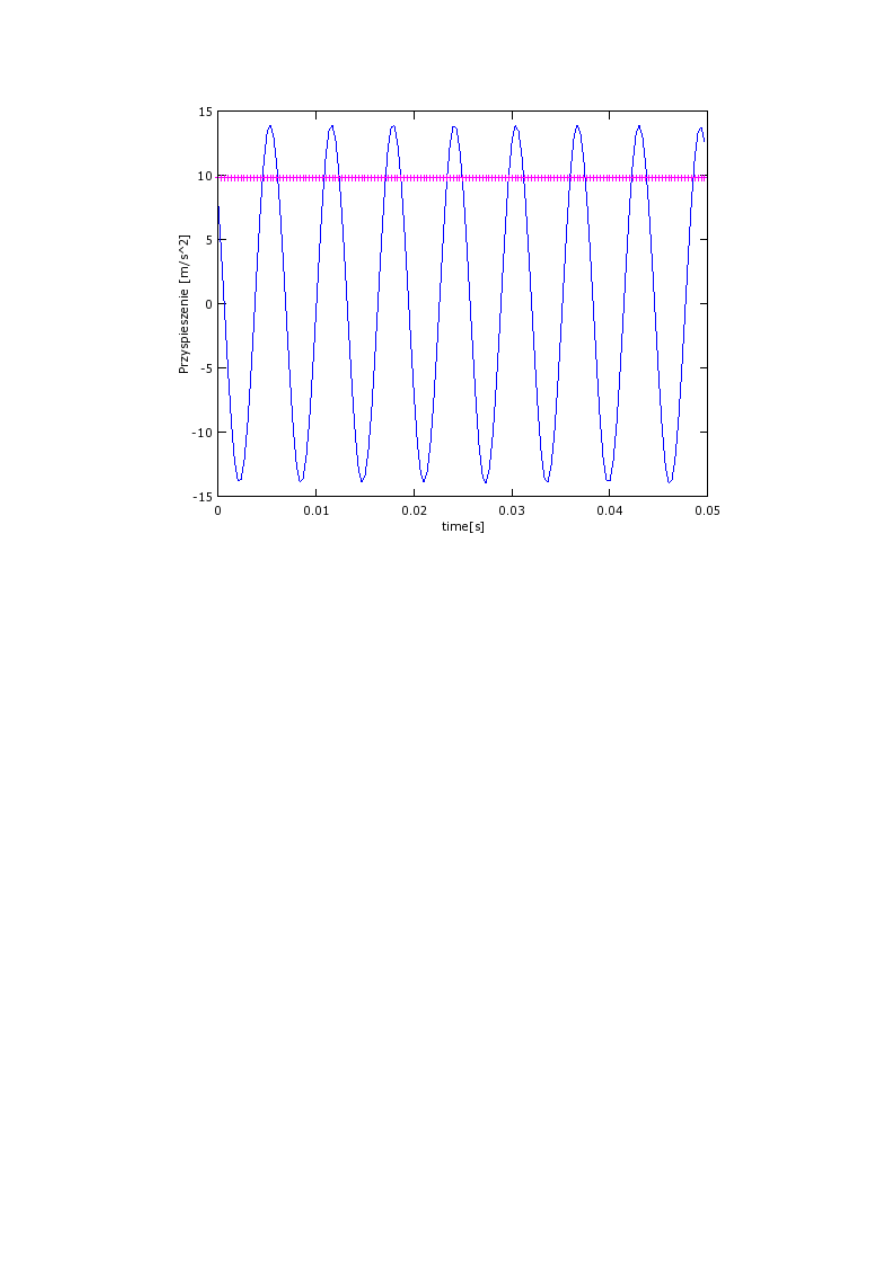
Kalibracja czujnika przyspieszenia:
Stała a
RMS
=2,1788 mm/V
Pomiar wykonywaliśmy dla częstotliwości 3000 Hz przez 10 sekund.
4. Przetwarzanie sygnałów
Przemieszczenie:
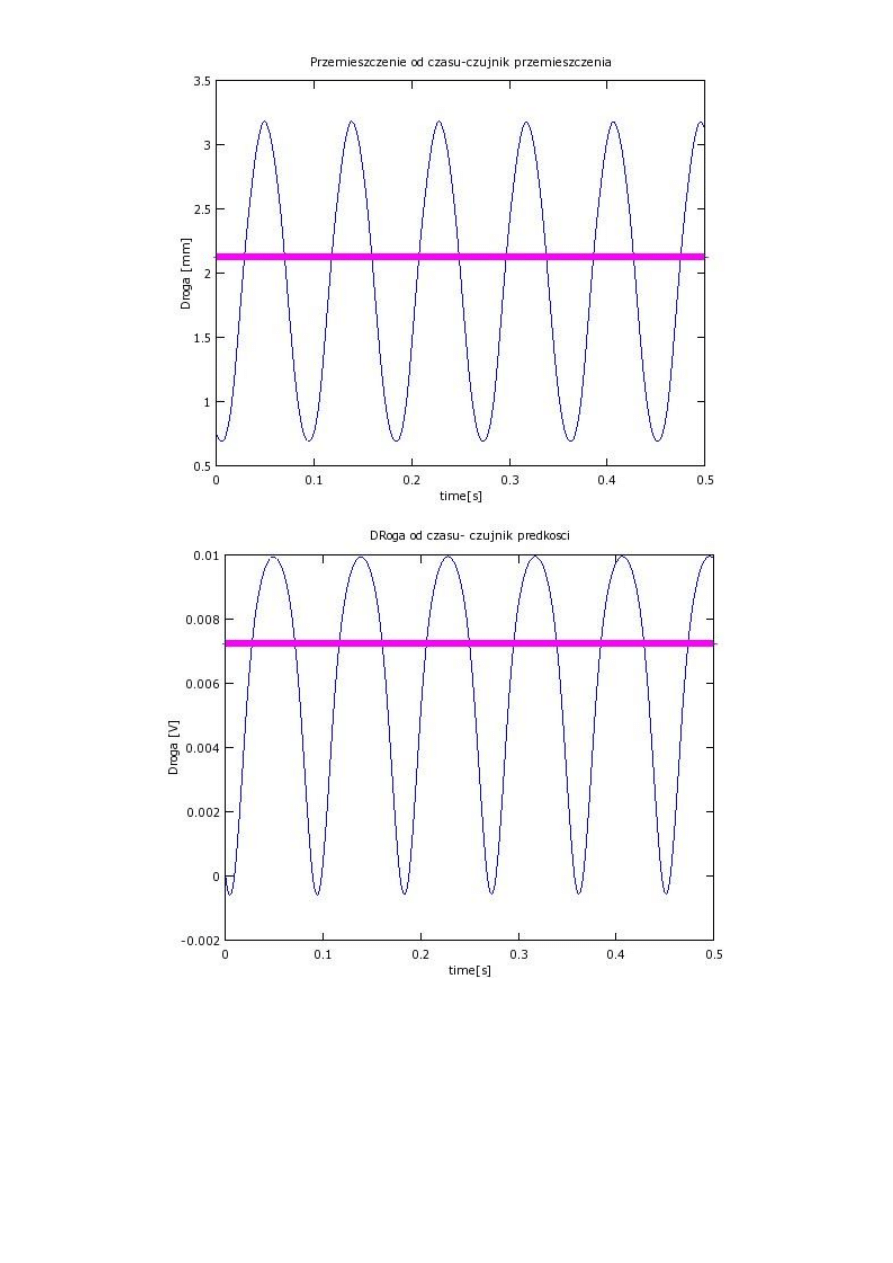
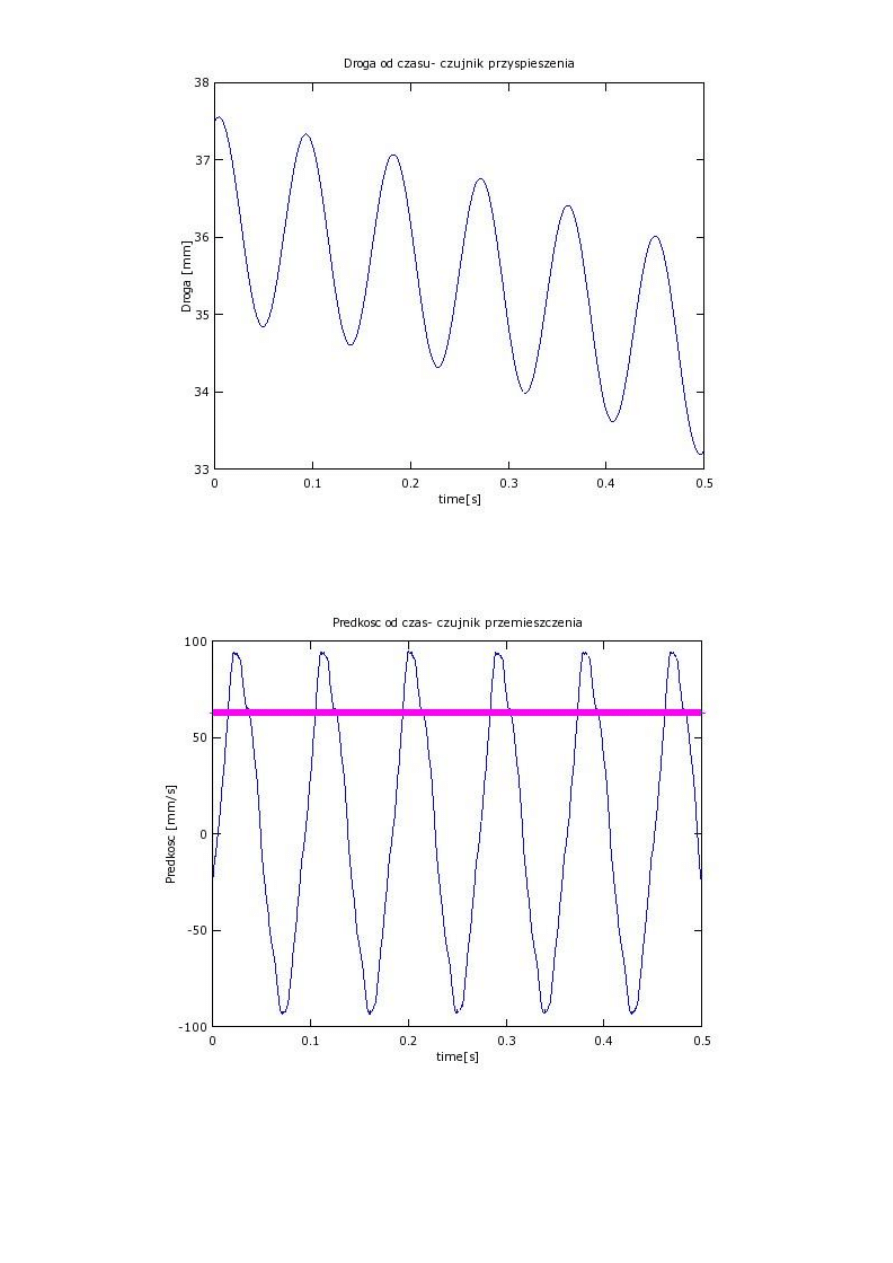
Prędkość:
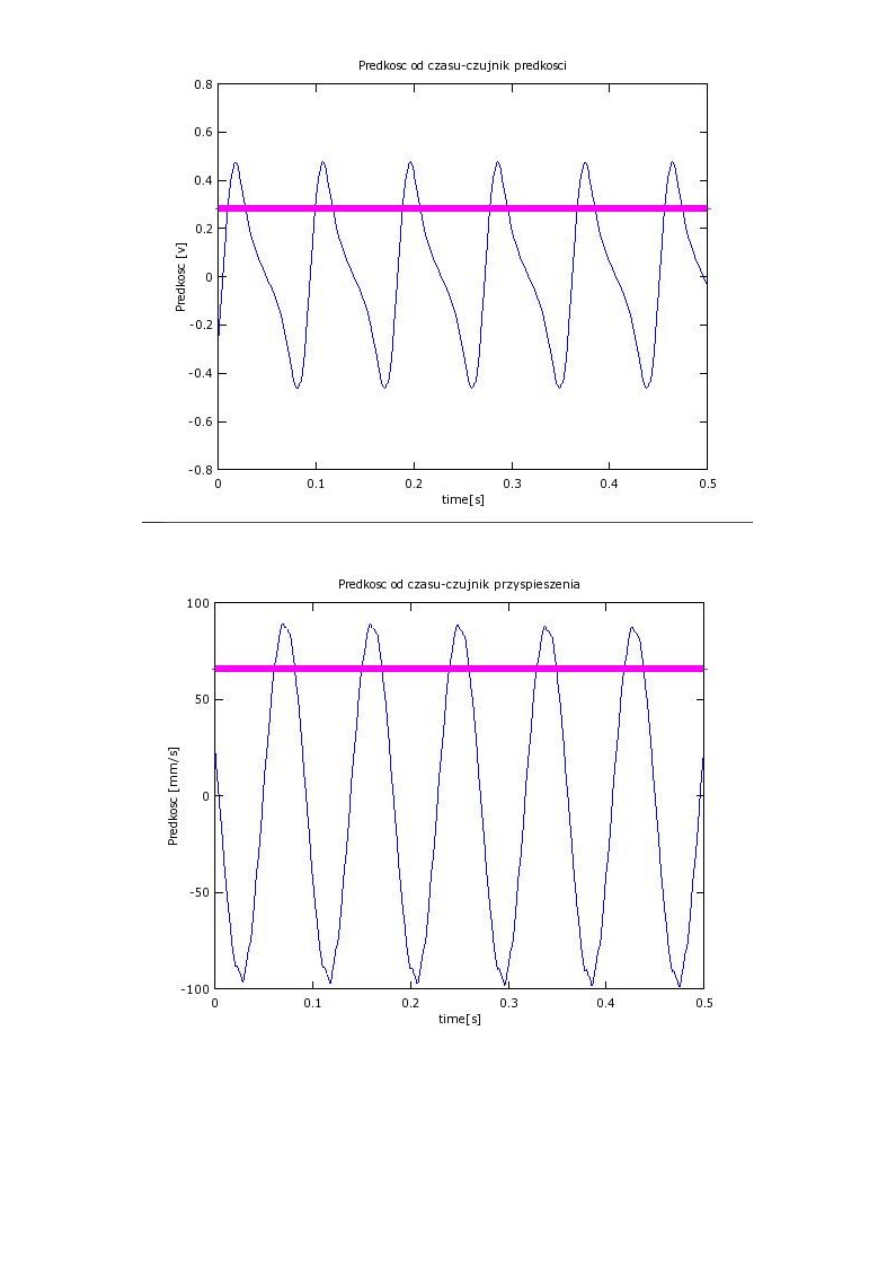
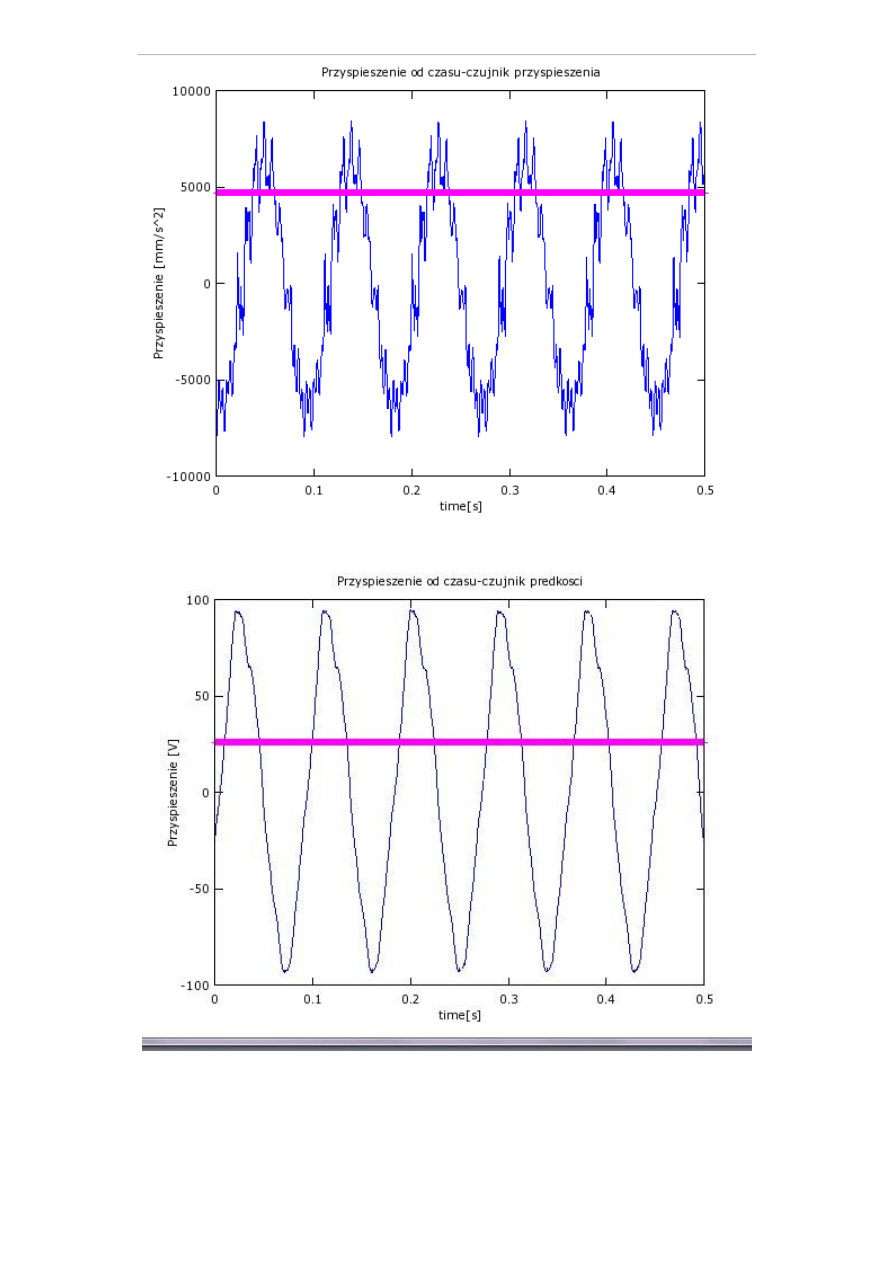
Przyspieszenie
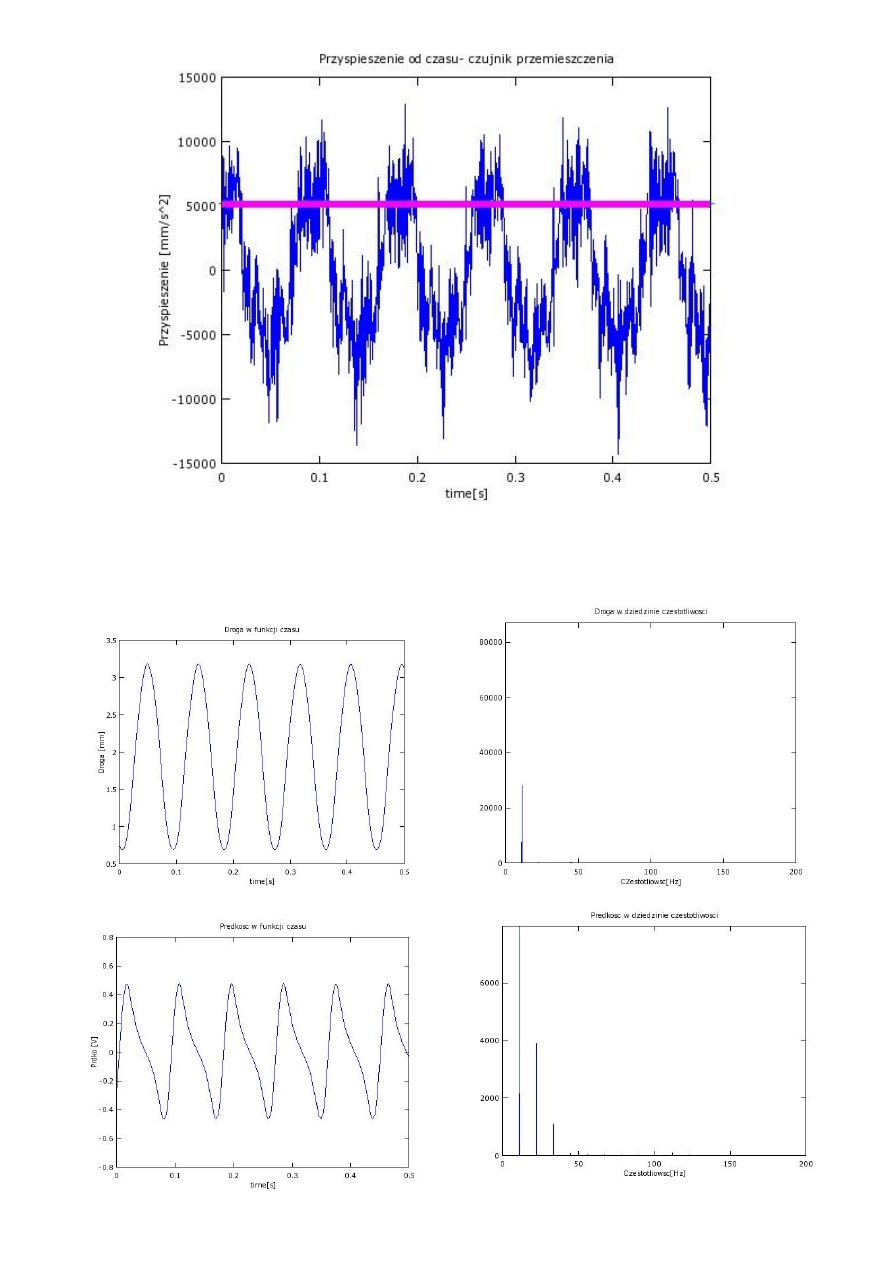
DFT
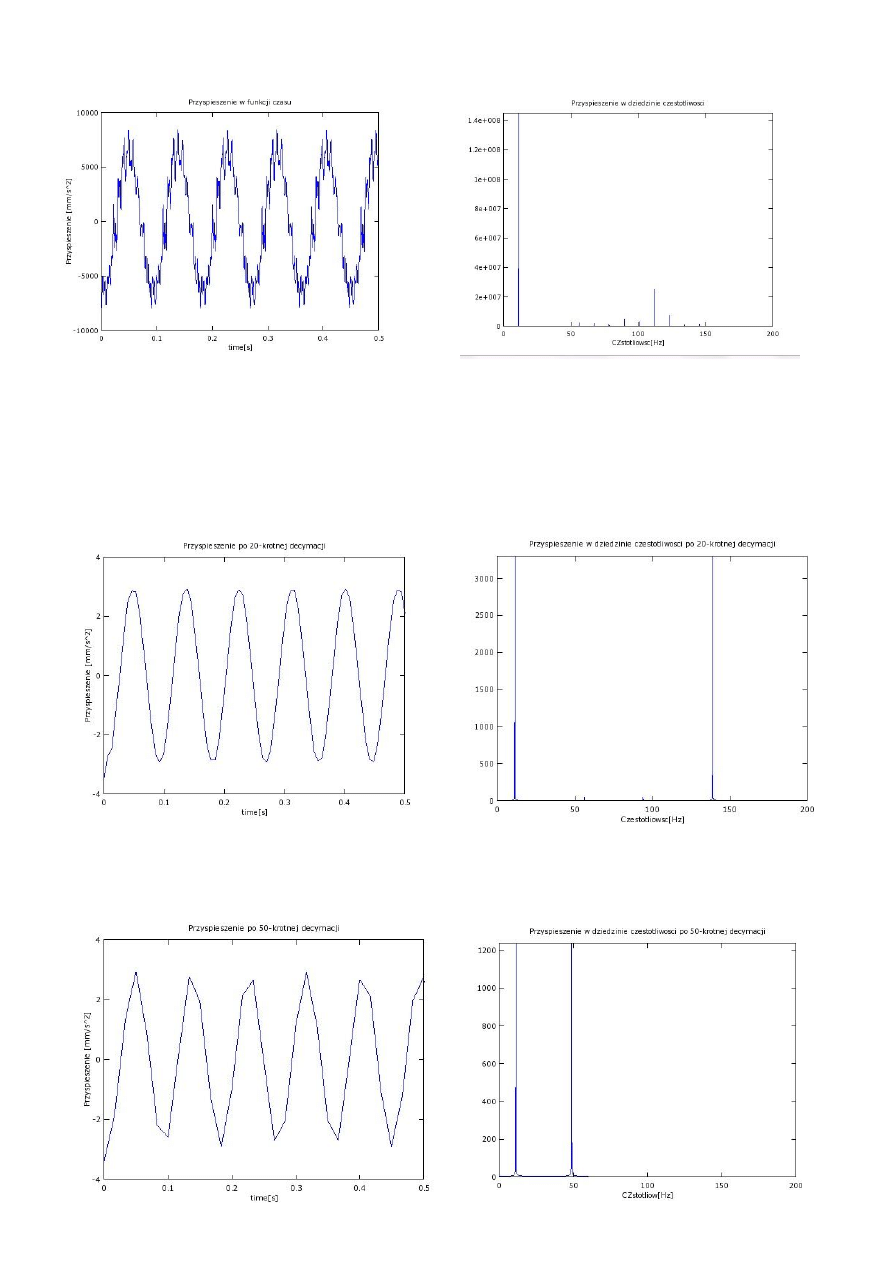
Decymacja:
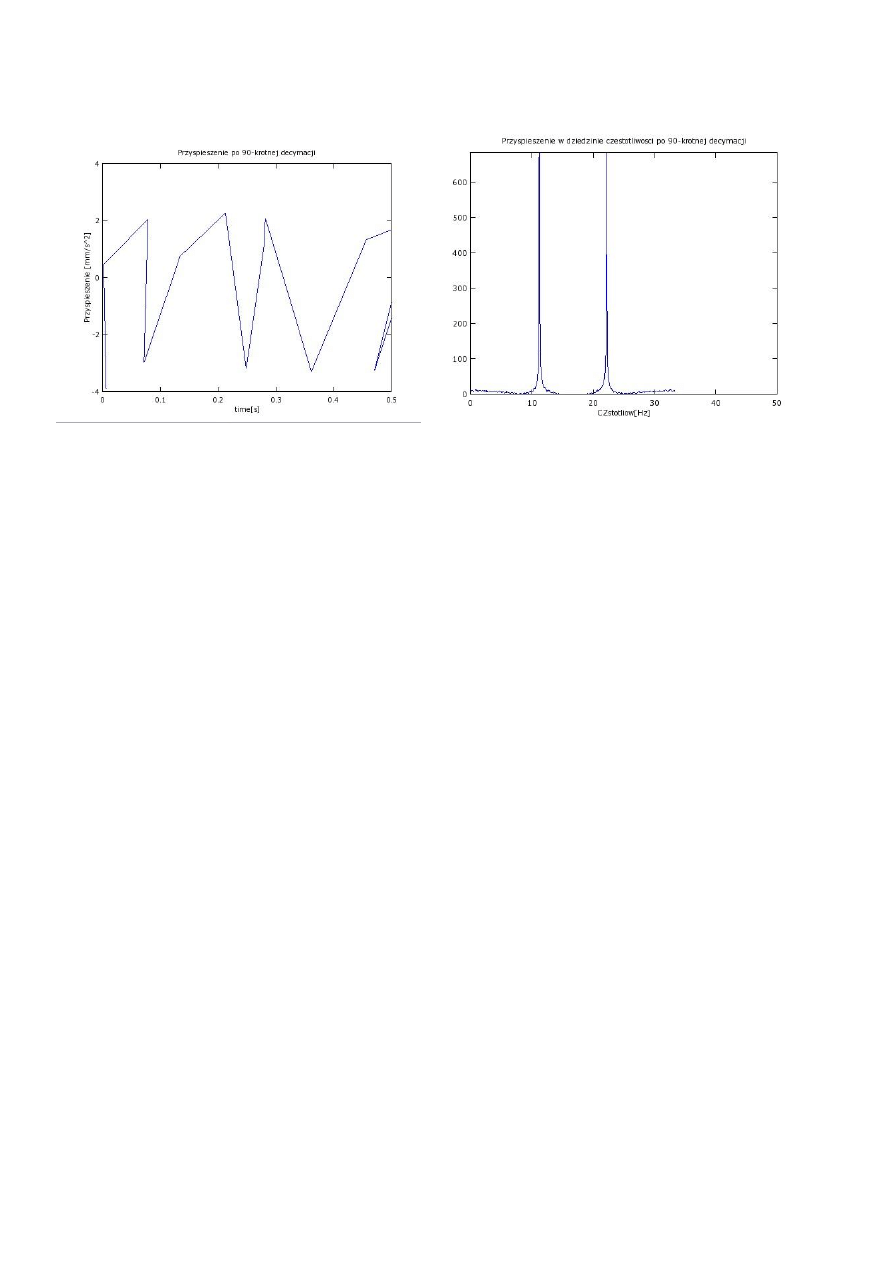
5. WNIOSKI
Przetwarzany sygnał nie będzie idealnie pokrywał się z sygnałem, który zmierzono bezpośrednio odpowiednim
czujnikiem. Będzie on posiadał mniejsze lub większe odchyłki.
Można zauważyć, że im więcej obróbki tym sygnał staje się mniej wiarygodny. W szczególności mowa tutaj o
sygnałach dwukrotnie całkowanym i dwukrotnie różniczkowanym. Pojawiają się widoczne odchyłki oraz zakres może
się zmieniać.

Wyszukiwarka
Podobne podstrony:
PPSmoje
więcej podobnych podstron