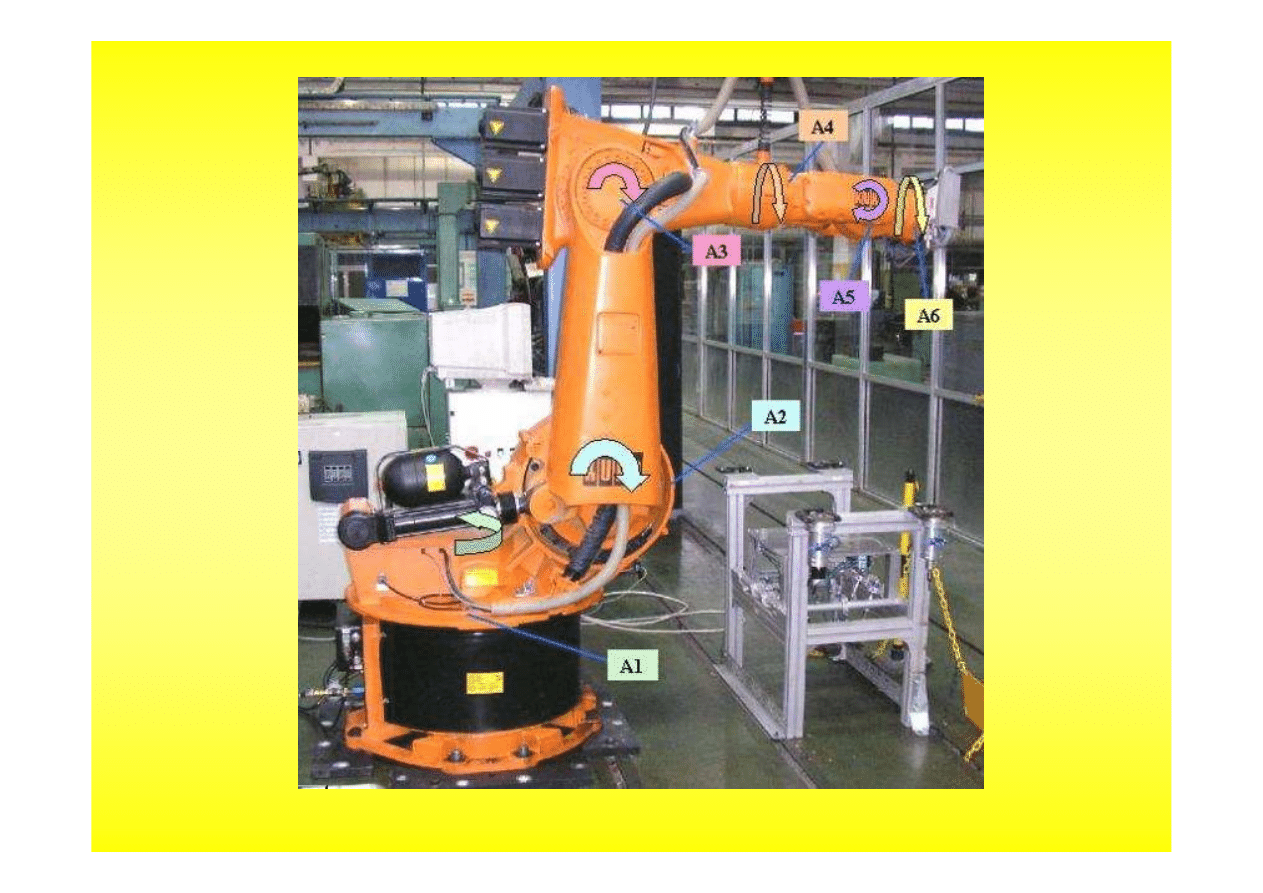
URZ
Ą
DZENIA
CHWYTAJ
Ą
CE ROBOTÓW
PRZEMYSŁOWYCH
8.1. Zadania urz
ą
dze
ń
chwytaj
ą
cych
W procesie manipulacji urz
ą
dzenia chwytaj
ą
ce robotów przemysłowych słu
żą
do realizacji
nast
ę
puj
ą
cych elementarnych zada
ń
:
•
pobrania (uchwycenia) obiektu manipulacji (przedmiotu) w poło
ż
eniu pocz
ą
tkowym,
•
trzymania obiektu (przedmiotu) w trakcie trwania czynno
ś
ci manipulacyjnych, tzn.
oddziaływania na przedmiot z sił
ą
zapobiegaj
ą
c
ą
zmianie jego poło
ż
enia wzgl
ę
dem
chwytaka w wyniku oddziaływuj
ą
cych na przedmiot sił ci
ęż
ko
ś
ci lub sił bezwładno
ś
ci,
•
ewentualnego poprawiania orientacji manipulowanego przedmiotu w taki sposób, by
odchyłka pocz
ą
tkowego poło
ż
enia przedmiotu od poło
ż
enia zadanego nie wpływała na
ko
ń
cowe poło
ż
enie przedmiotu,
•
uwolnienia obiektu manipulacji w miejscu docelowym.
8.2. Klasyfikacja i charakterystyka urz
ą
dze
ń
chwytaj
ą
cych
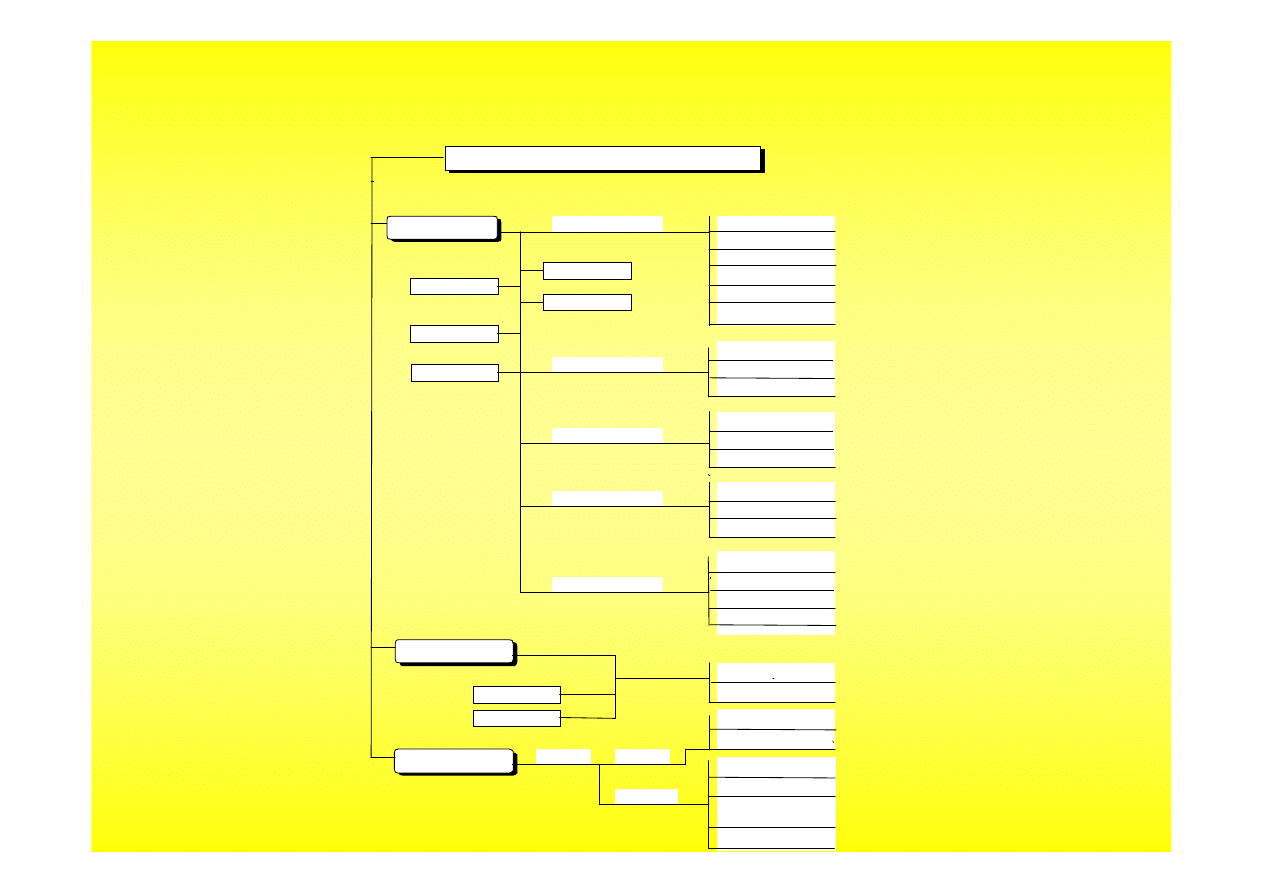
CHWYTAKI ROBOTÓW PR ZEM YSŁOWYCH
MECHANICZNE
MAGN ETYCZNE
PODCIŚNIENIOWE
do blach
do tarcz i płytek
do tarcz
do korpusów
siłowe
kształtowe
do wałków
siła docisku
czujniki
rodzaj końcówek
układ końcówek
układ napędowy
pneumatyczny
hydrauliczny
elektryczny
elektromagnetyczny
adhezyjny
pamięć kształtu
magnesy trwałe
elektromagnesy
bierne
czynne
dotykowe
zbliżeniowe
obciążeniowe
temperatury
stała
nastawialna
regulowana automat.
sztywne
sprężyste
elastyczne
pojedyncze
podwójne
wielokrotne
pneumatyczne
przez zanik prądu
przez zmianę
kierunku prądu
mechaniczne
uwalniania
chwytania
sposób
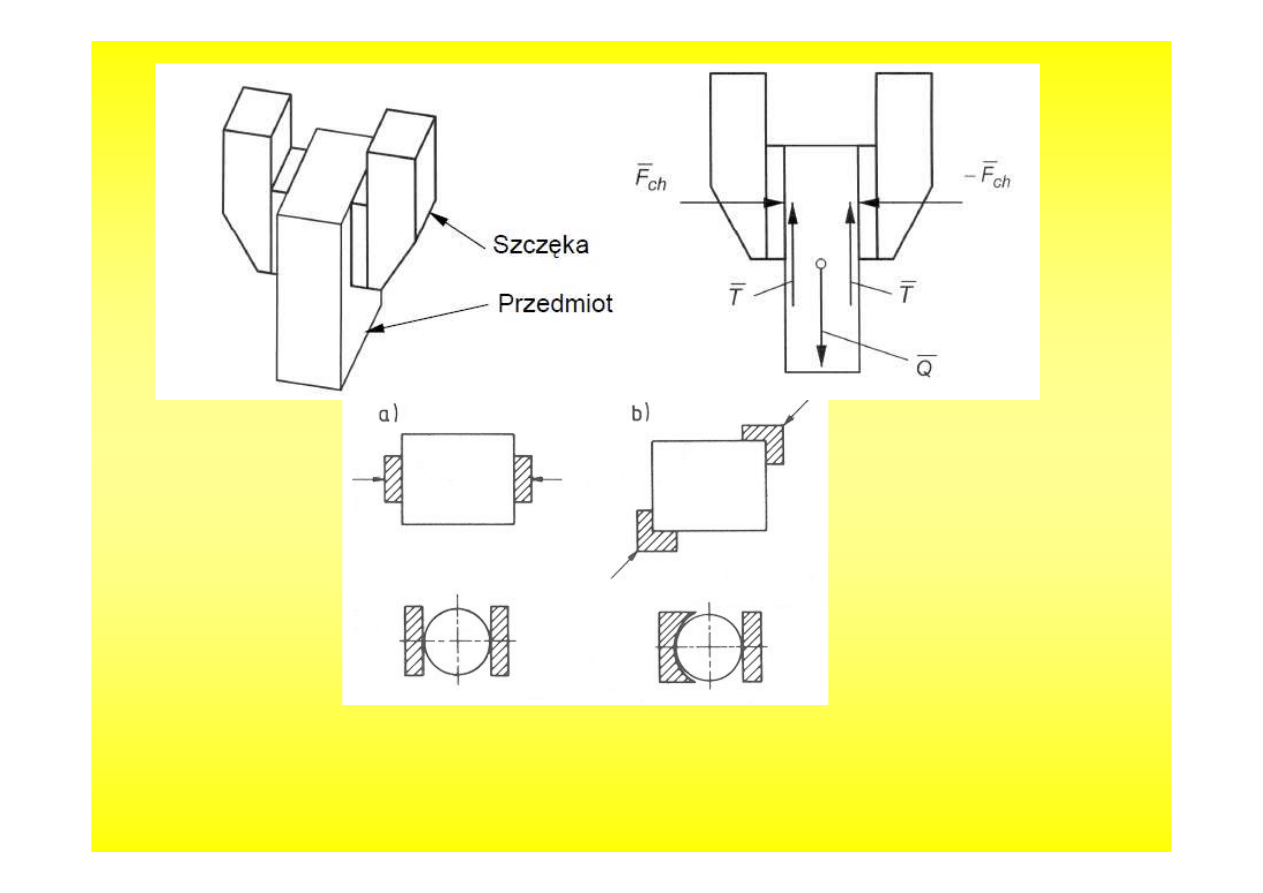
Rys. 8.2. Zasada chwytania siłowego przedmiotów o powierzchniach
równoległych i walcowych: a) sposób zadowalaj
ą
cy, b) sposób
kombinowany
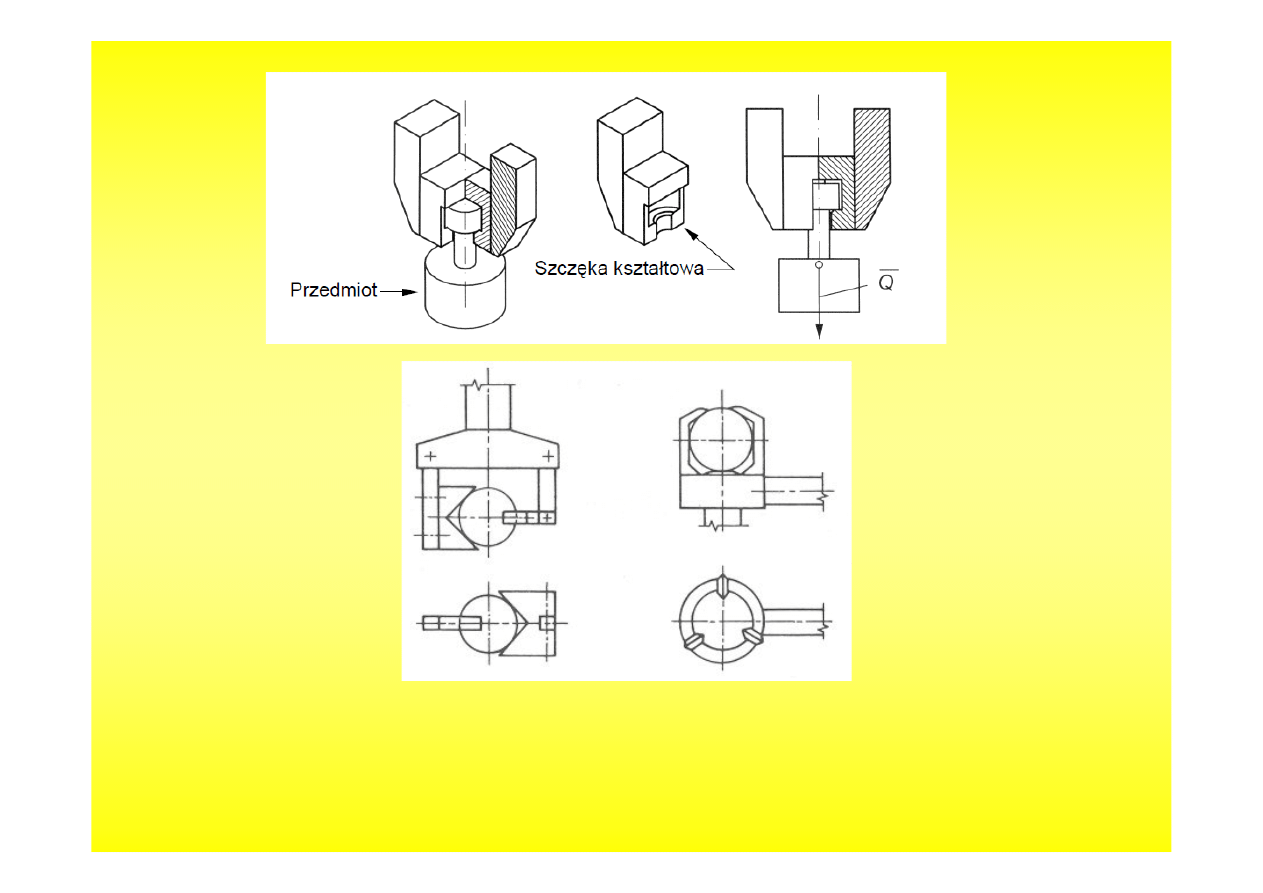
Rys. 8.3. Chwytanie kształtowe
8.3. Wybór typu chwytaka dla danej klasy obiektów manipulacji
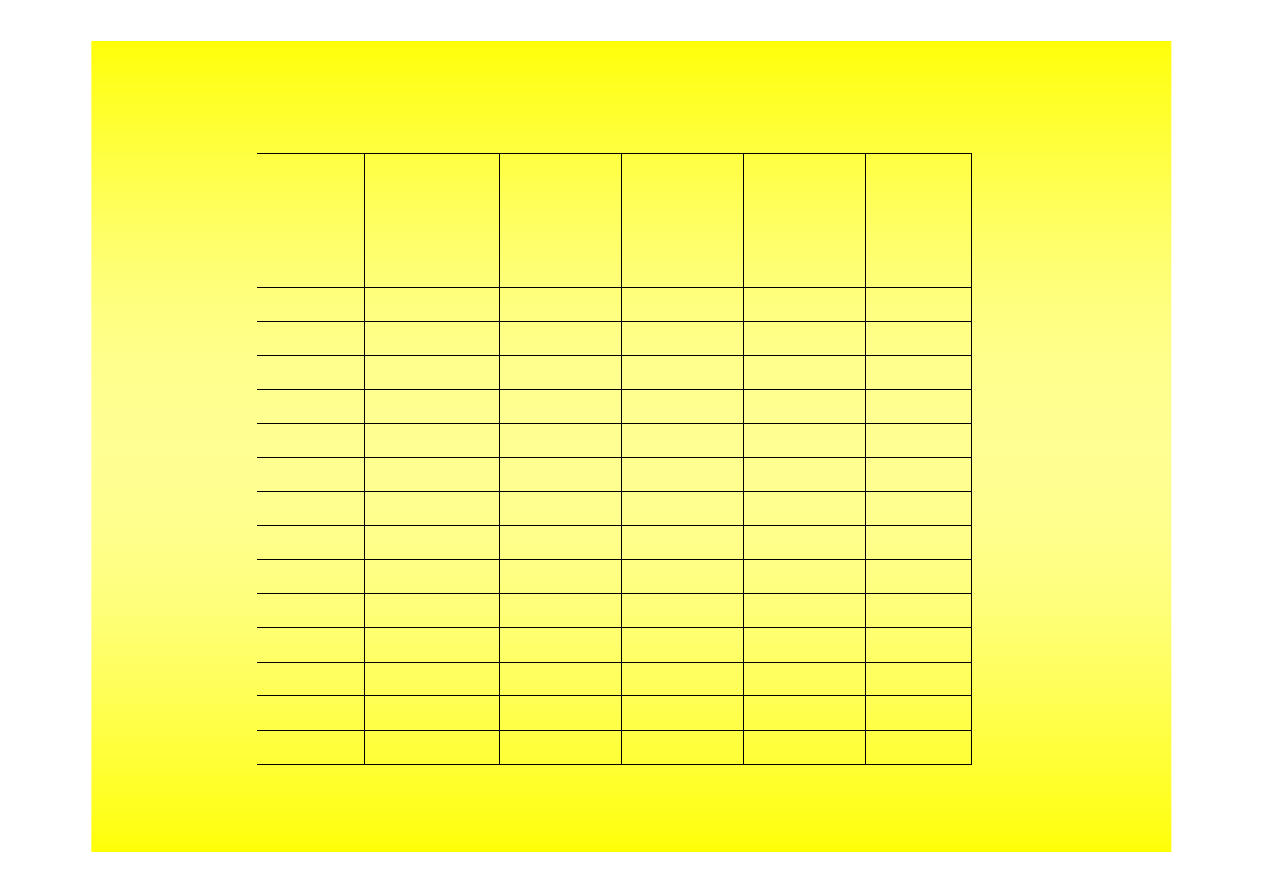
Tablica 8.1. Przykładowe kształty obiektów manipulacji i zalecane rodzaje urz
ą
dze
ń
chwytaj
ą
cych
Obiekt
manipulacji
Chwytak
Mechaniczny
Podci
ś
nieniowy
Elektro-
magnetyczny
Wałki, tulejki
tak
nie
warunkowo (tylko
płaskie kr
ąż
ki)
Płytki
warunkowo
tak
tak
Arkusze blach Płyty
nie
tak
tak
Prostopadło
ś
ciany
tak (specjalne
konstrukcje)
warunkowo
tak
Obiekty o zło
ż
onych
kształtach
tak (specjalne
konstrukcje)
nie
tak (z wieloma
magnesami)
8.4. Budowa chwytaków mechanicznych
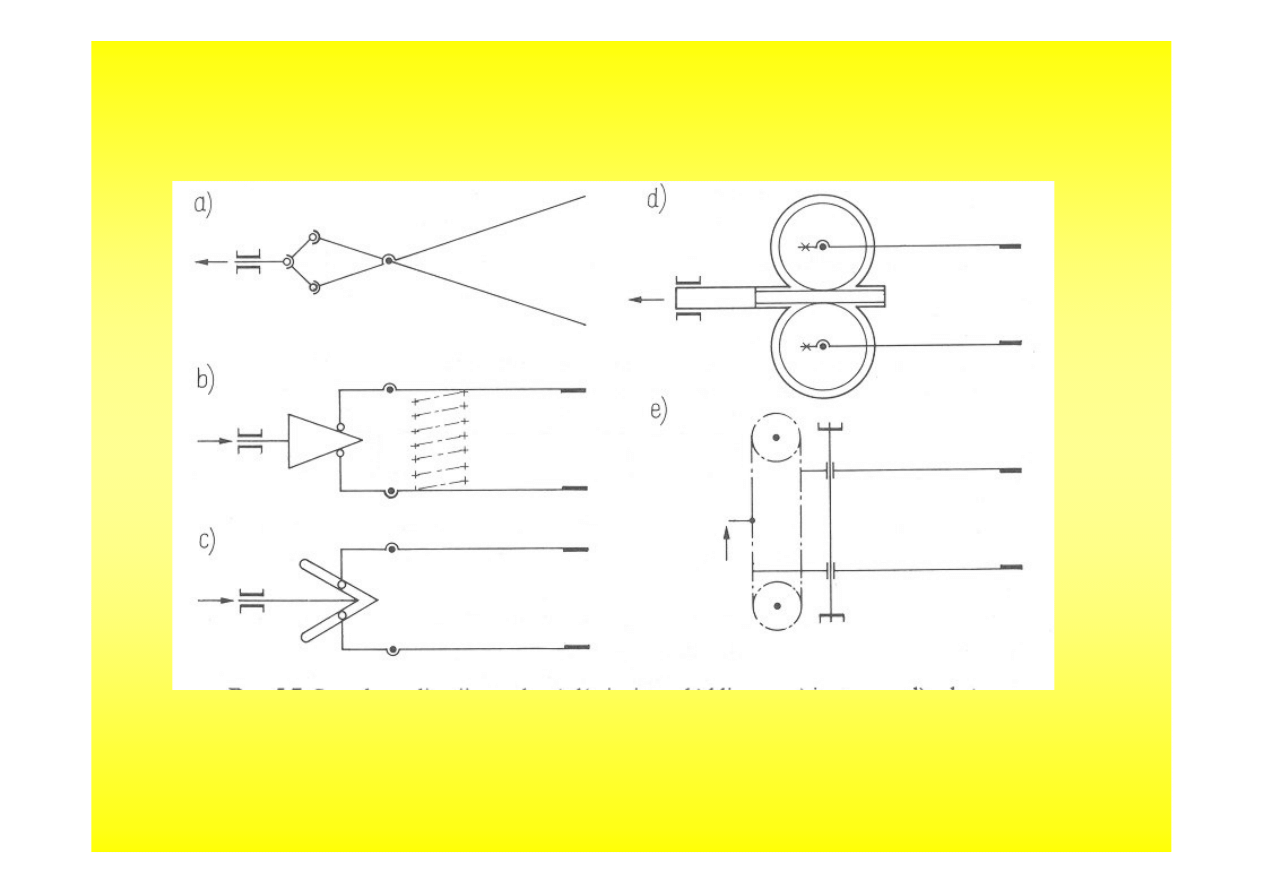
Rys. 8.7. Sposoby realizacji nap
ę
du: a) d
ź
wigniowy, b) klinowy, c) jarzmowy, d) z
ę
baty,
e) ci
ę
gnowy (ła
ń
cuchowy)
w = 3n - 2p
5
- p
4
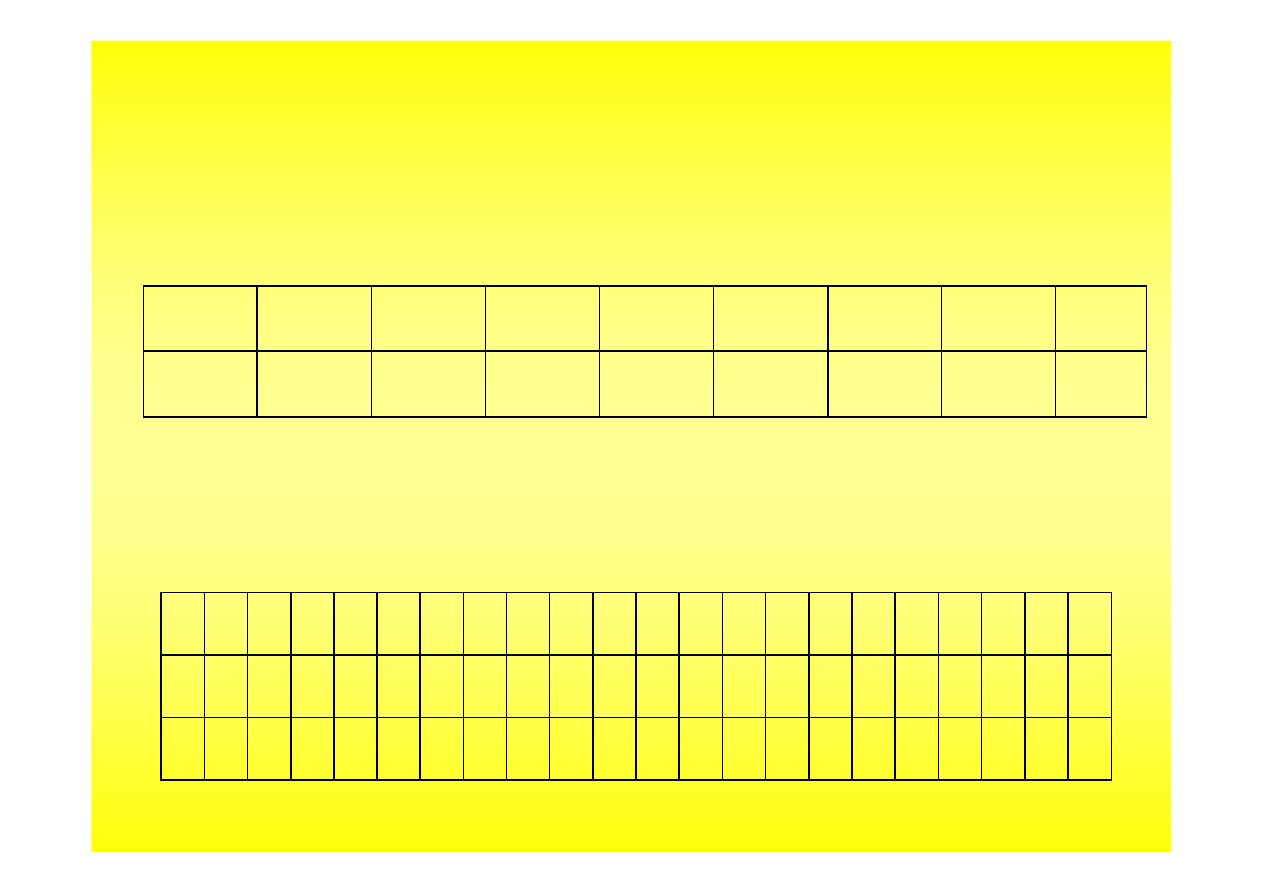
Tablica 8.2. Zwi
ą
zek mi
ę
dzy liczb
ą
członów n i liczb
ą
par kinematycznych pi
ą
tej klasy p
5
n
1
3
5
7
9
11
13
...
p
5
1
4
7
10
13
16
19
...
Tablica 8.4. Zwi
ą
zek mi
ę
dzy liczb
ą
członów n i liczb
ą
par kinematycznych pi
ą
tej p
5
i czwartej
p
4
klasy
n
2
4
6
8
...
3
5
7
9
...
4
6
...
5
7
9
...
6
...
7
...
p
5
2
5
8
11
...
3
6
9
12
...
4
7
...
5
8
11
...
6
...
7
...
p
4
1
1
1
1
...
2
2
2
2
...
3
3
...
4
4
4
...
5
...
6
...
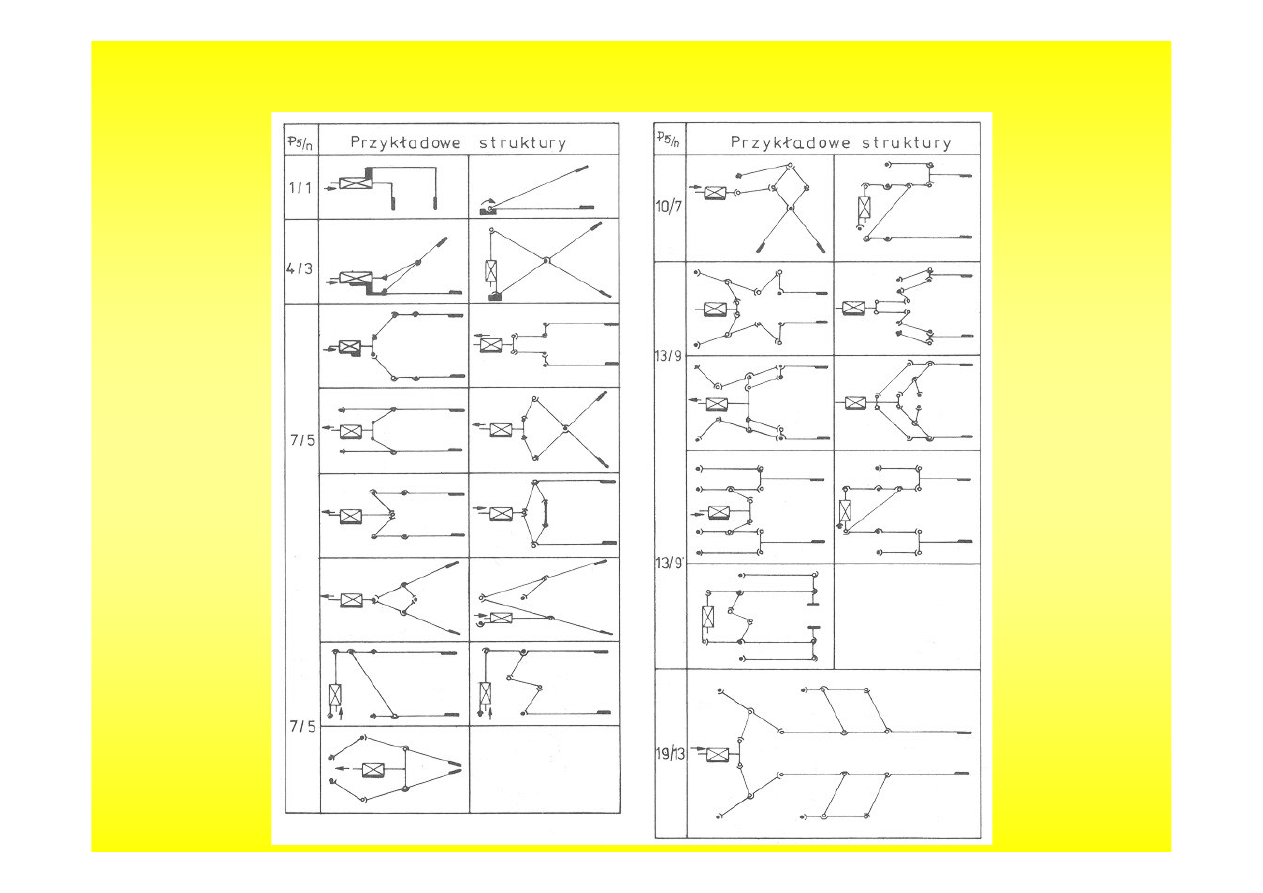
Tablica 8.3. Mechanizmy chwytaków zawierające pary kinematyczne tylko V klasy [5]
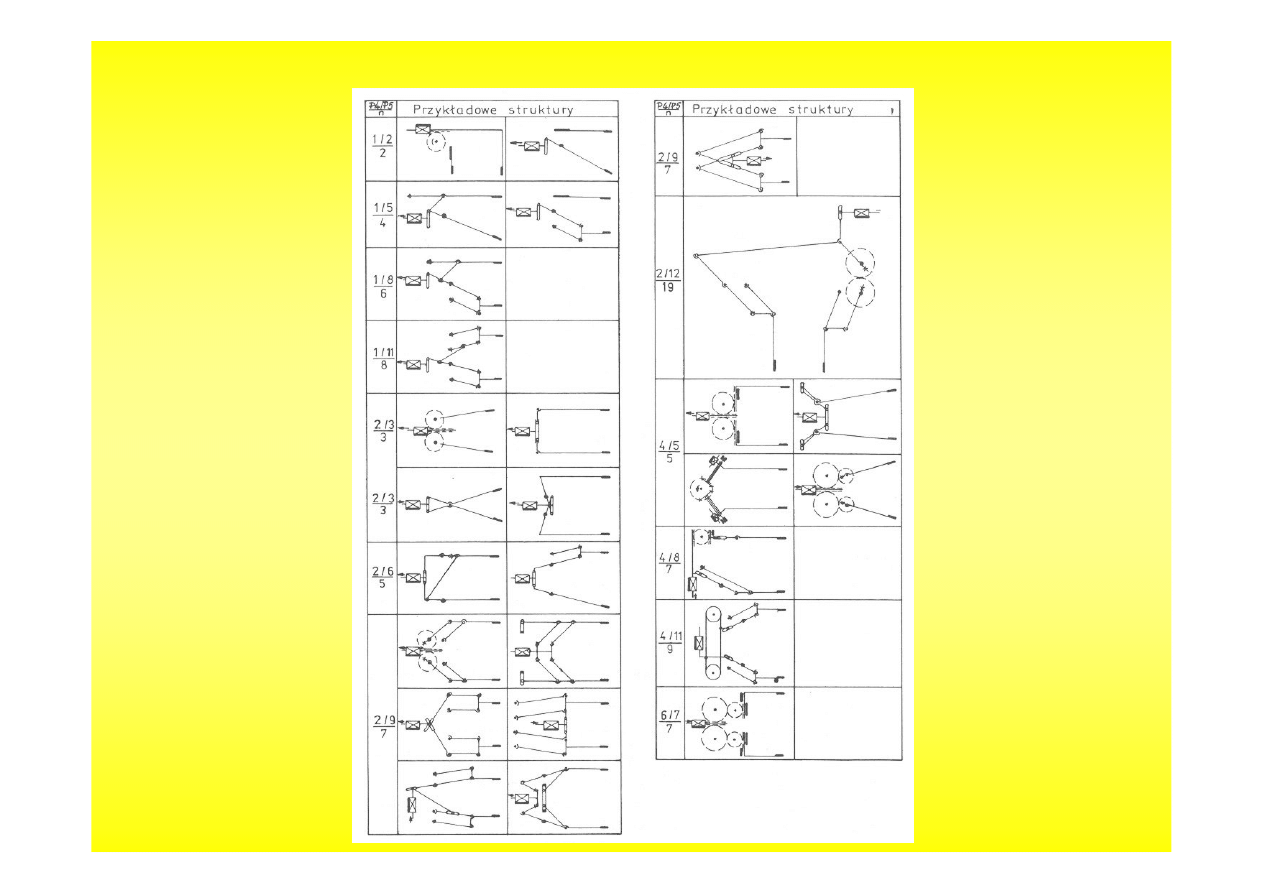
Tablica 8.5. Mechanizmy chwytaków zawieraj
ą
ce pary kinematyczne IV i V klasy [5]
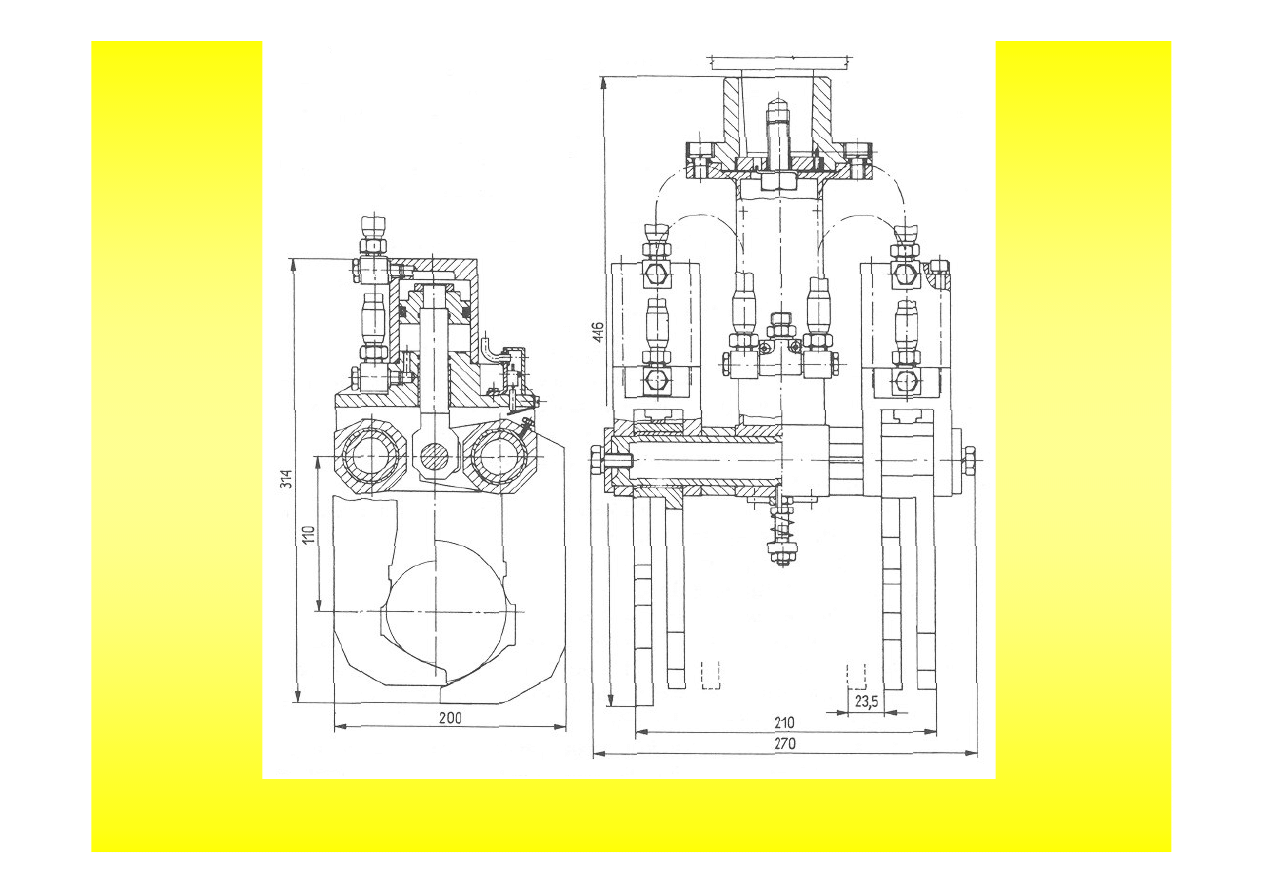
Rys. 8.8. Chwytak do wałków
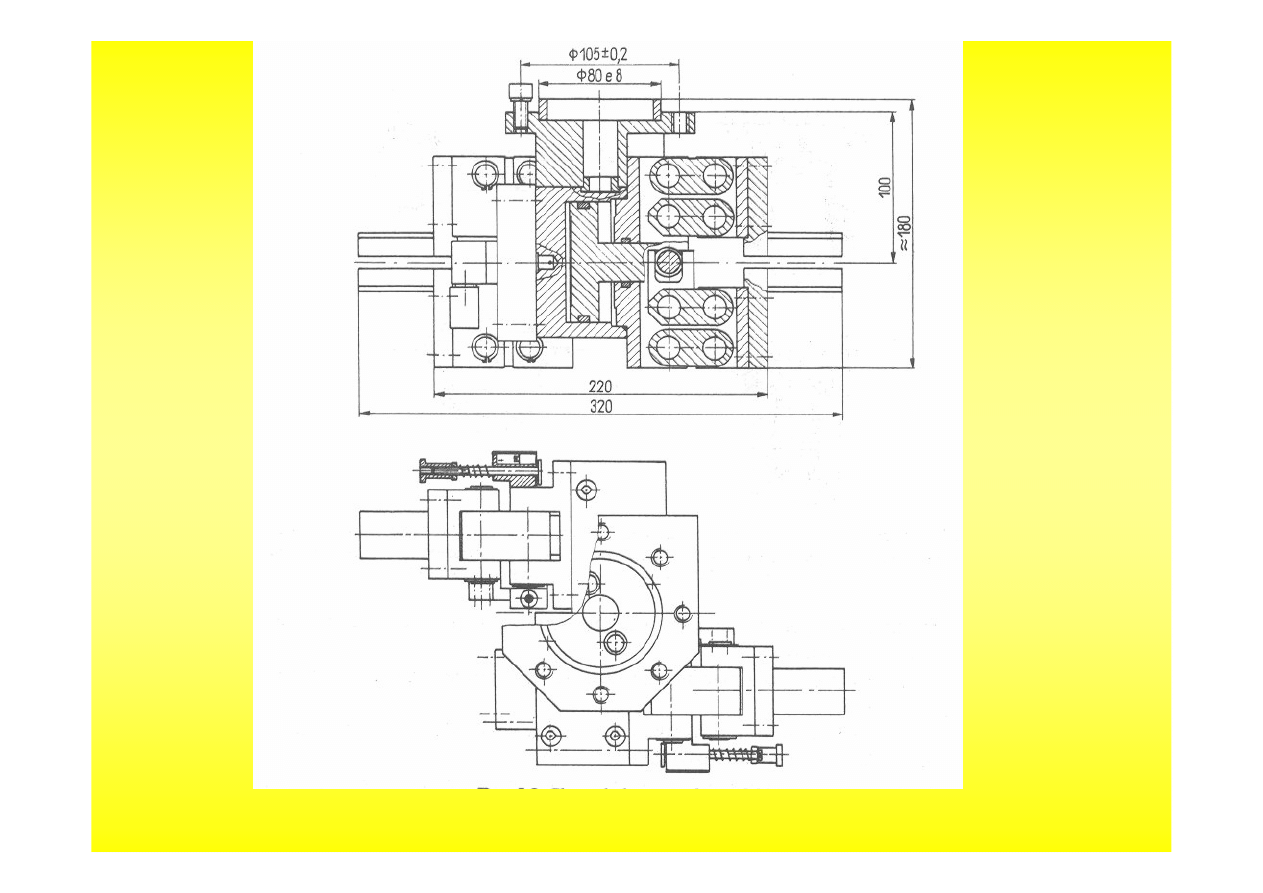
Rys. 8.9. Chwytak do tarcz i tulei
Chwytaki mechaniczne o nap
ę
dzie pneumatycznym
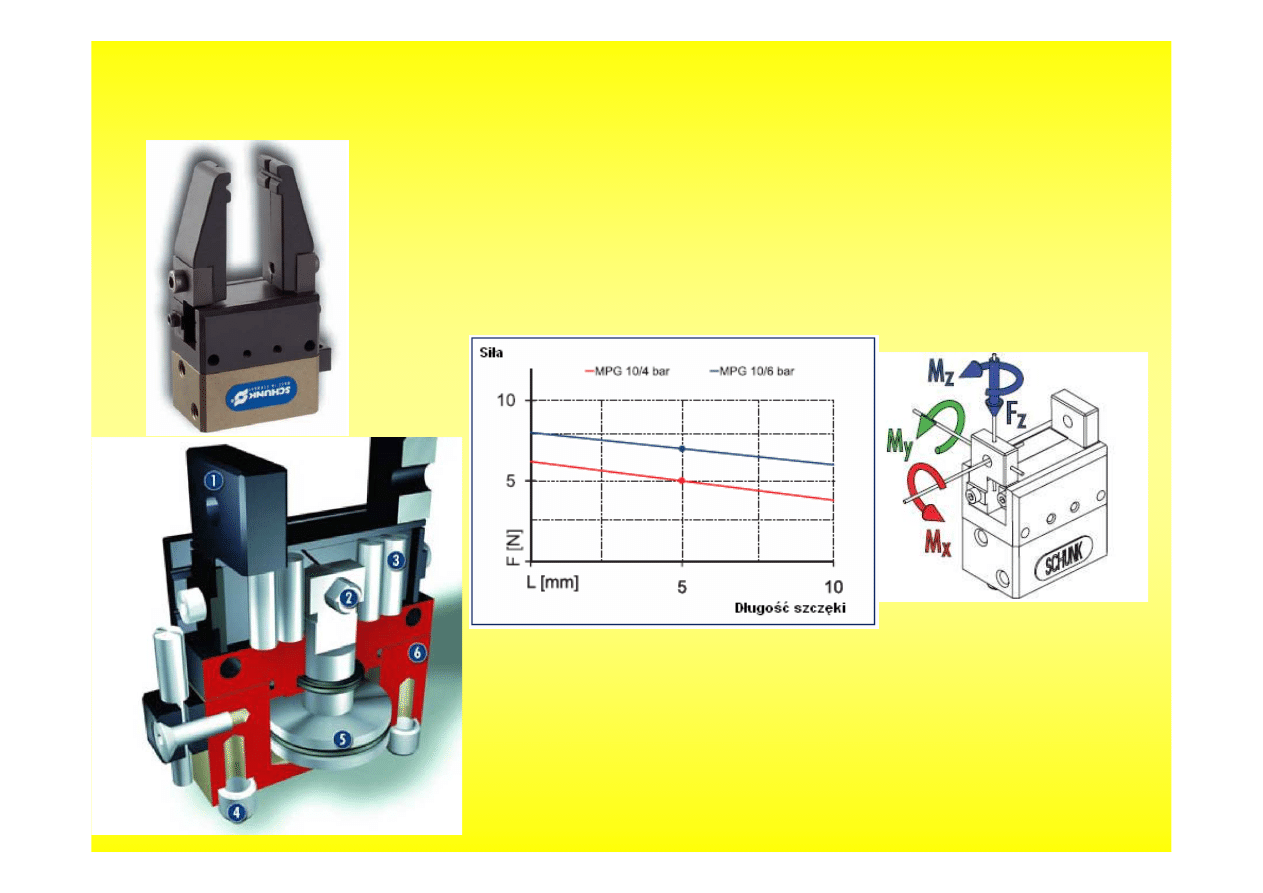
Chwytaki do małych komponentów Seria MPG firmy Schunk
Stosowane głównie do chwytania małych przedmiotów, w
niewielkich przestrzeniach roboczych. Najcz
ęś
ciej spotykane w
miejscach wymagaj
ą
cych wysokiego stopnia czysto
ś
ci
ś
rodowiska
takich jak laboratoria i hale w fabrykach farmaceutycznych.
Chwytaki te charakteryzuj
ą
si
ę
dobra dokładno
ś
ci
ą
pozycjonowania
jak i powtarzalno
ś
ci
ą
.
1 - uchwyt mocowania szcz
ę
ki
2 - ł
ą
cznik ko
ń
cówki tłoczyska
3 - rolki
4 -
ś
ruby mocuj
ą
ce
5 - tłok
6 - obudowa
Typ
MPG 10 MPG 16 MPG 20 MPG 40
MPG64 MPG 80
Moment Mx [Nm]
0.2
0.3
0.3
1.5
3.5
5.0
Moment My [Nm]
0.2
0.3
0.3
2.0
6.0
9.0
Moment Mz [Nm]
0.2
0.3
0.3
4.0
9.0
15.0
Siła Fz [N]
15.0
40.0
50.0
170.0
250.0
500.0
Parametry chwytaka:
Typ
MPG 10 MPG 16 MPG 20 MPG 40 MPG 64 MPG 80
Skok szcz
ę
ki chwytka
[mm]
1.0
1.5
2.0
6.0
10.0
14.0
Siła zamykania [N]
9.0
25.0
28.0
110.0
200.0
380.0
Siła otwierania [N]
7.0
22.0
24.0
90.0
190.0
360.0
Waga [kg]
0.006
0.025
0.038
0.2
0.6
1.2
Maksymalny
zalecany
ci
ęż
ar manipulowanego
elementu [kg]
0.045
0.12
0.14
0.55
1.0
1.9
Zapotrzebowanie
powietrza
przy
podwójnym skoku [cm
3
]
0.15
0.35
0.6
5.76
18.85
29.3
Ci
ś
nienie nominalne [bar] 6.0
6.0
6.0
6.0
6.0
6.0
Ci
ś
nienie
maksymalne
[bar]
3.0
2.0
2.0
2.0
2.0
2.0
Ci
ś
nienie minimalne [bar] 6.0
8.0
8.0
8.0
8.0
8.0
Czas zamykania [s]
0.01
0.01
0.03
0.05
0.01
0.06
Czas otwierania [s]
0.01
0.01
0.03
0.05
0.01
0.06
Maksymalne wysuni
ę
cie
punktu chwytu [mm]
10.0
16.0
20.0
40.0
64.0
80.0
Maksymalny
ci
ęż
ar
szcz
ę
ki [kg]
0.005
0.01
0.012
0.08
0.24
0.4
Minimalna
temperatura
pracy [
°C]
-10.0
-10.0
-10.0
-10.0
-10.0
-10.0
Maksymalna temperatura 90.0
90.0
90.0
90.0
90.0
90.0
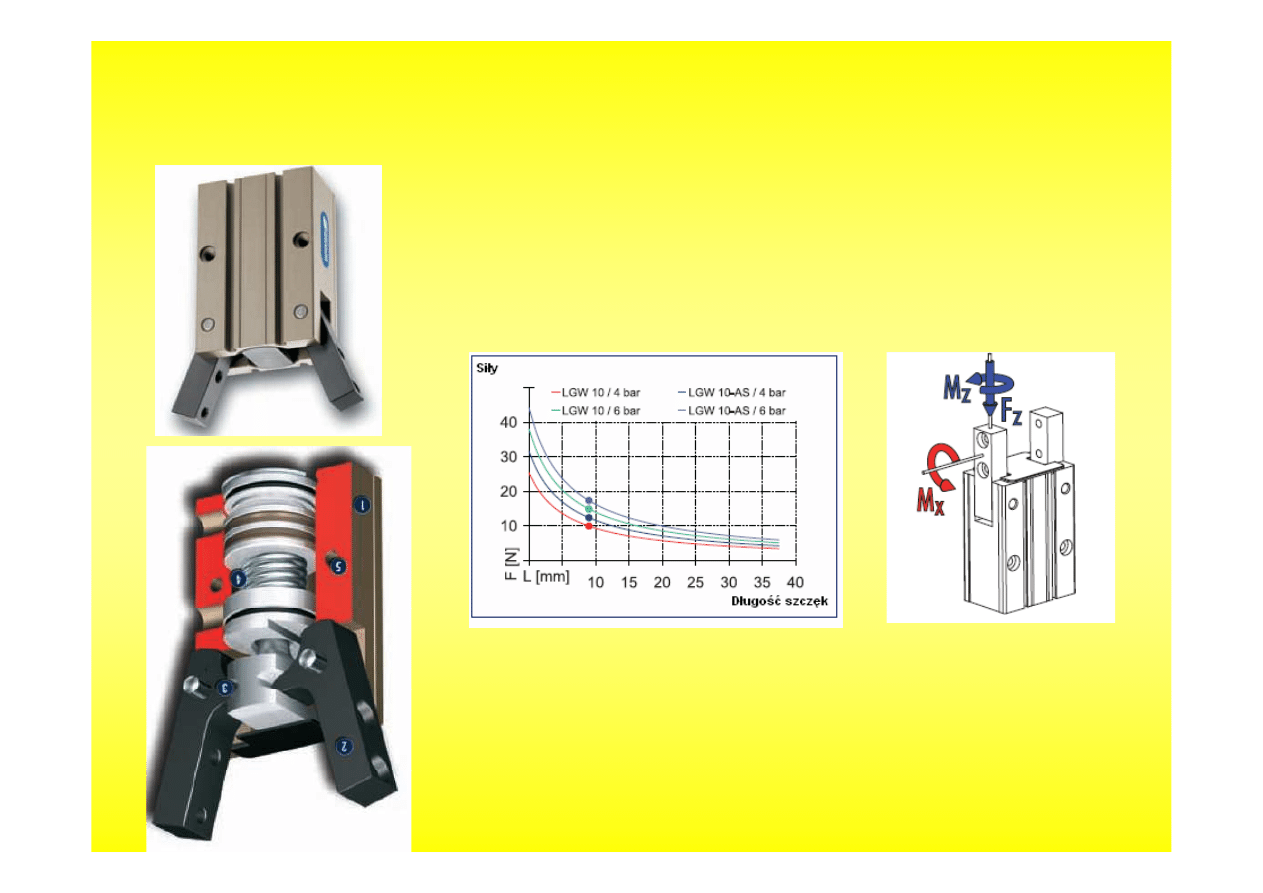
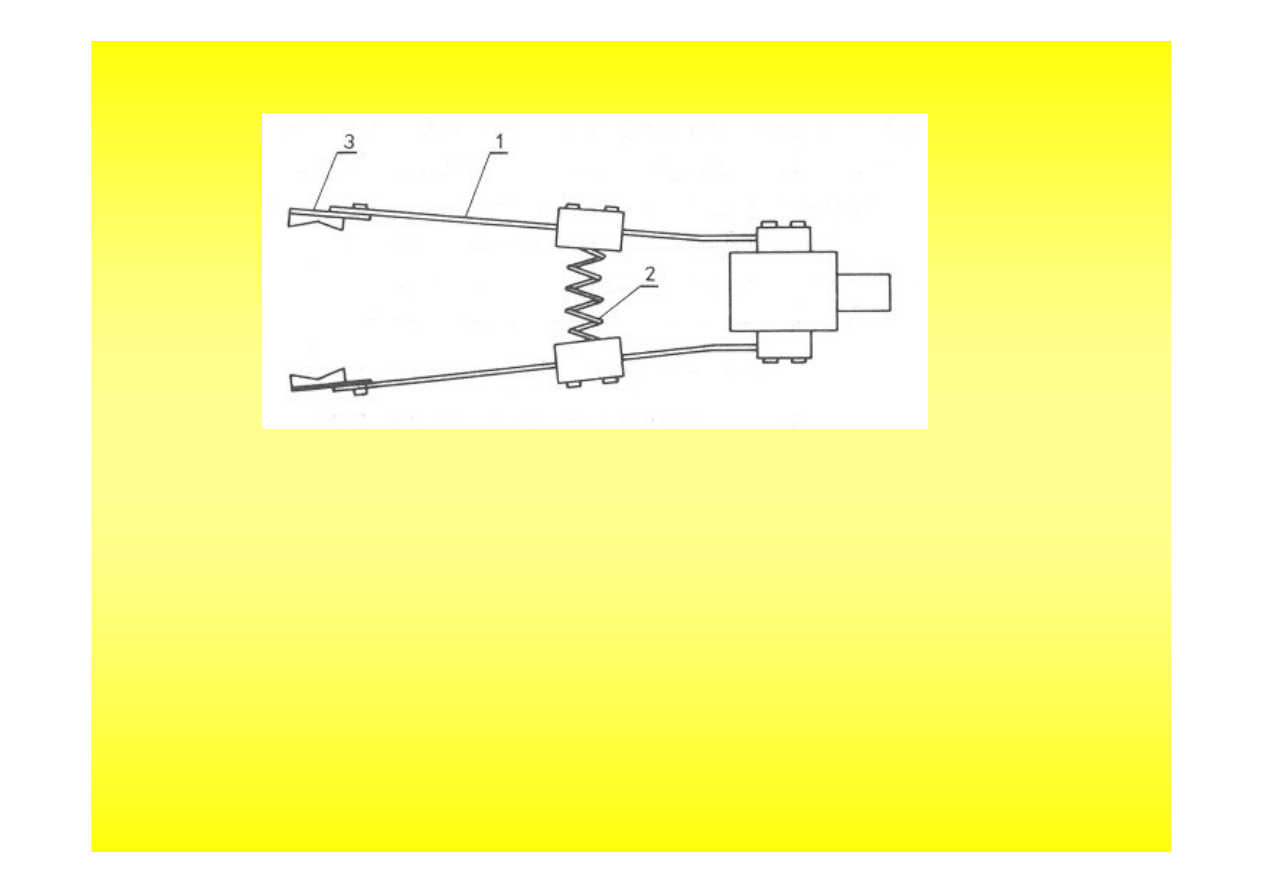
Chwytaki uniwersalne Seria LGW
Chwytaki z tej serii nie maja charakteryzuj
ą
si
ę
szerokim
zakresem zastosowania. Budowa tych chwytaków jest prosta
przez co te
ż
tania i wytrzymały, lecz nie ogranicza to w
ż
aden
sposób mo
ż
liwo
ś
ci chwytnych. Chwytak LGW zapewnia
wysok
ą
precyzje uchwycenia jak i stabilno
ść
podczas
przytrzymywania
1 - obudowa
2 - szcz
ę
ka
3 - zako
ń
czenie tłoczyska przenosz
ą
ce ruch
4 - mechanizm blokuj
ą
cy ruch szcz
ę
k
5 - powierzchnia mocowania
Typ
LGW 10
LGW 16
LGW 25
LGW 32
LGW 40
Moment Mx [Nm]
0.4
1.2
3.0
4.8
7.0
Moment Mz [Nm]
0.3
1.0
2.8
4.0
5.6
Siła Fz [N]
18.0
35.0
58.0
80.0
130.0
Parametry chwytaka
Typ
LGW 10
LGW 16 LGW 25 LGW 32 LGW 40
K
ą
t rozwarcia szcz
ę
ki
[°]
20.0
20.0
20.0
20.0
20.0
Moment chwytu [Nm]
0.22
0.78
3.2
5.6
8.6
Waga [kg]
0.042
0.088
0.25
0.46
0.83
Maksymalny zalecany ci
ęż
ar
manipulowanego elementu [kg]
0.085
0.19
0.5
0.7
0.85
Zapotrzebowanie powietrza przy
podwójnym skoku [cm
3
]
0.7
2.3
9.0
16.1
31.0
Ci
ś
nienie nominalne [bar]
0.6
0.6
0.6
0.6
0.6
Ci
ś
nienie maksymalne [bar]
0.2
0.2
0.2
0.2
0.2
Ci
ś
nienie minimalne [bar]
0.8
0.8
0.8
0.8
0.8
Czas zamykania [s]
0.02
0.03
0.045
0.05
0.055
Czas otwierania [s]
0.02
0.02
0.04
0.055
0.055
Maksymalne wysuni
ę
cie punktu
chwytu [mm]
25.0
32.0
50.0
62.0
80.0
Maksymalny ci
ęż
ar szcz
ę
ki [kg]
0.04
0.05
0.13
0.22
Minimalna temperatura pracy
[
°C]
-10.0
-10.0
-10.0
-10.0
-10.0
Maksymalna temperatura pracy
[
°C]
90.0
90.0
90.0
90.0
90.0
Powtarzalno
ść
[mm]
0.02
0.02
0.02
0.02
0.02
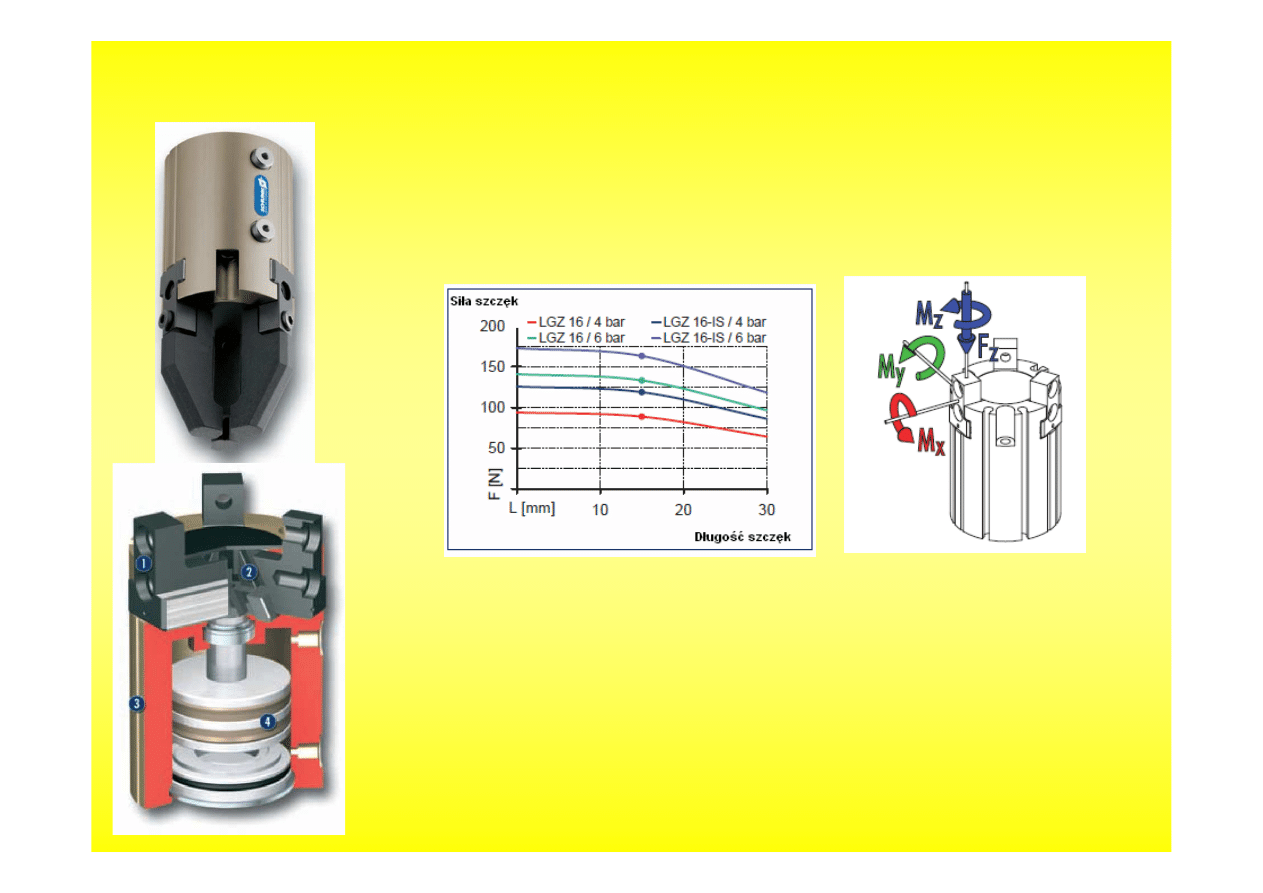
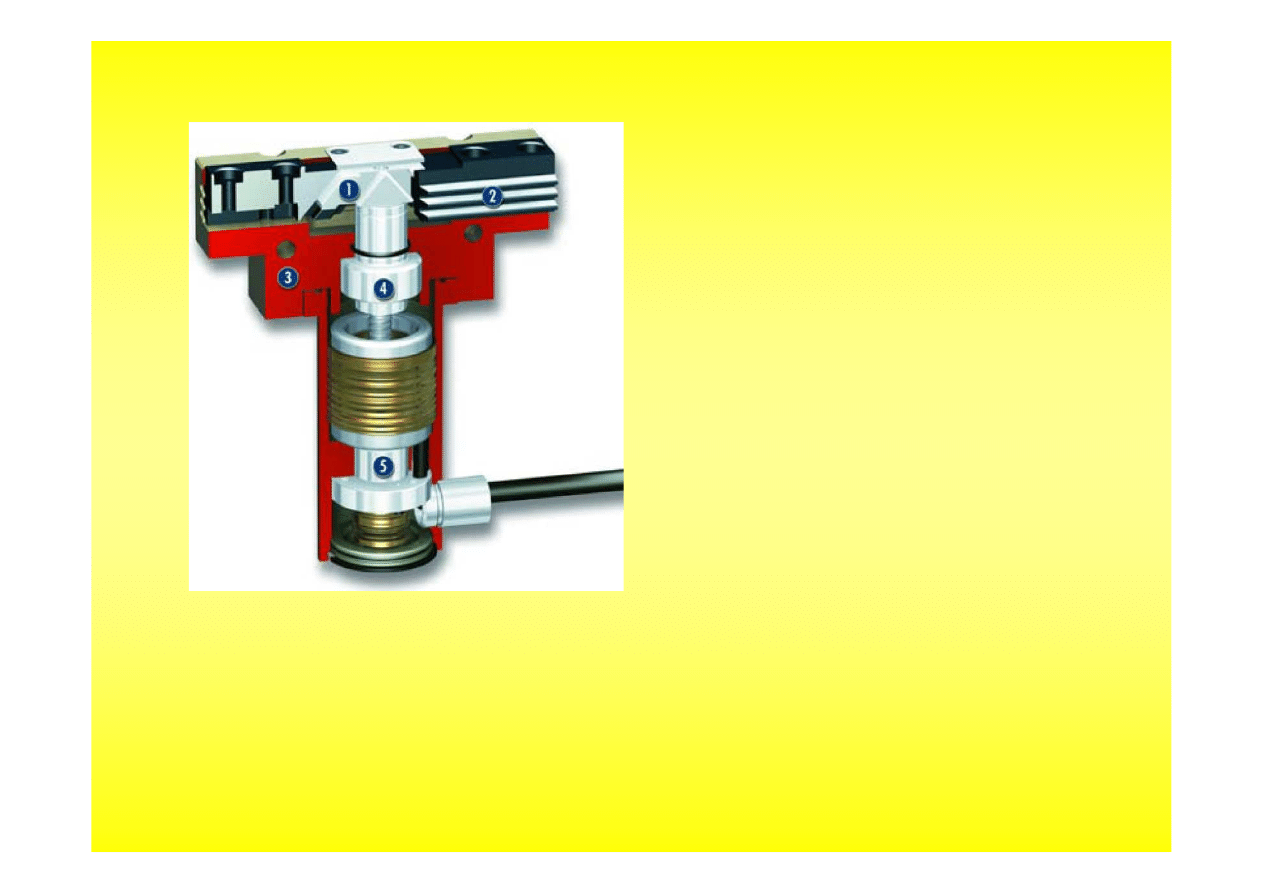
Chwytaki z trzema ko
ń
cówkami chwytnymi Seria LGZ
S
ą
to chwytaki o zastosowaniu uniwersalnym do
ś
rodowisk czystych i
lekko zabrudzonych. Zastosowanie w nich trzech ruchomych
ko
ń
cówek chwytnych znacznie poprawiło dokładno
ść
chwytania i
pozycjonowania elementu jak i zapewnia odpowiednie trzymanie
przedmiotu podczas jego manipulacji.
1 - cz
ęść
dolna ko
ń
cówki chwytnej
2 - mechanizm kinematyczny zamieniaj
ą
cy
ruch tłoczyska na ruch szcz
ę
k chwytaka
3 - obudowa
4 - tłok
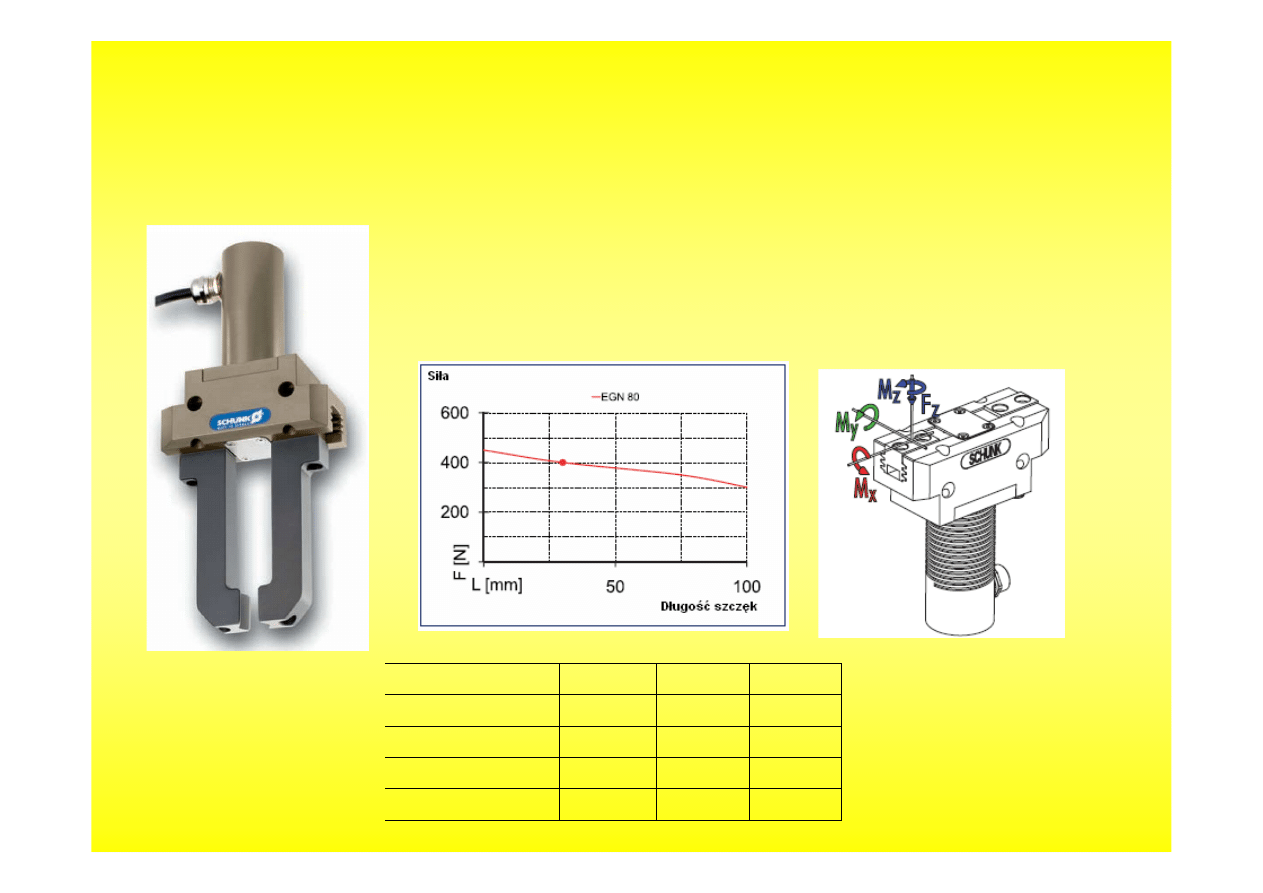
Chwytaki mechaniczne z nap
ę
dem elektrycznym
Chwytaki uniwersalne z dwoma ko
ń
cówkami chwytnymi Seria EGN
Jest to chwytak do szerokiego zakresu czynno
ś
ci zwi
ą
zanych
z manipulacj
ą
elementów o ró
ż
nych wielko
ś
ciach. Jedn
ą
z
jego podstawowych zalet jest z du
ż
e przyspieszenia jak i
wysoka pr
ę
dko
ść
przemieszczania.
Typ
EGN 80
EGN 100
EGN 160
Moment Mx [Nm]
60.0
80.0
170.0
Moment My [Nm]
95.0
100.0
135.0
Moment Mz [Nm]
55.0
70.0
140.0
Siła Fz [N]
1500.0
2000.0
3700.0
1 - mechanizm kinematyczny
2 - prowadnica szcz
ę
ki chwytaka
3 - obudowa
4 - Przkładnia zamieniajaca ruch
obrotowy na post
ę
powy
5 – silnik elektryczny
Parametry chwytaka seria EGN
Typ
EGN 80
EGN 100
EGN 160
Skok szcz
ę
ki chwytka [mm]
8.0
10.0
16.0
Maksymalna siła szcz
ę
k [N]
400.0
720.0
1000.0
Minimalna siła szcz
ę
k [N]
170.0
170.0
250.0
Waga [kg]
0.84
1.35
3.0
Maksymalny
zalecany
ci
ęż
ar
manipulowanego elementu [kg]
2.1
3.3
5.4
Czas zamykania [s]
0.3
0.35
0.5
Czas otwierania [s]
0.3
0.35
0.5
Maksymalne wysuni
ę
cie punktu
chwytu [mm]
100.0
125.0
200.0
Maksymalny ci
ęż
ar szcz
ę
k [kg]
0.6
1.1
3.5
Minimalna temperatura pracy [
°C]
5.0
5.0
5.0
Maksymalna temperatura pracy
[
°C]
65.0
65.0
55.0
Powtarzalno
ść
[mm]
0.01
0.01
0.01
Dokładno
ść
umieszczania [mm]
0.05
0.05
0.05
Maksymalna szybko
ść
[m/s]
80.0
80.0
80.0
Maksymalne
przyspieszenie
[m/s
2
]
4275.0
4275.0
4275.0
Dane elektryczne
Nominalne napi
ę
cie [V]
24.0
24.0
24.0
Nominalne pr
ą
d [A]
2.0
3.0
2.0
Maksymalne pr
ą
d [A]
6.5
6.5
6.5
Dane kontrolera steruj
ą
cego
Dostarczane napi
ę
cie [VDC]
24.0
24.0
24.0
Nominalne pr
ą
d [A]
12.0
12.0
12.0
Maksymalne pr
ą
d [A]
25.0
25.0
25.0
Waga [kg]
0.86
0.86
0.86
Interfaces
I/O, RS 232,
CAN-Bus,
I/O, RS 232,
CAN-Bus,
I/O, RS 232,
CAN-Bus,
Rys. 8.10. Chwytak ze spr
ęż
ystymi ko
ń
cówkami: 1-poło
ż
enie ko
ń
cówki w stanie
spoczynku, 2-poło
ż
enie ko
ń
cówki w stanie uchwycenia obiektu przed rozpocz
ę
ciem
kucia (linia przerywana), 3-poło
ż
enie ko
ń
cówki w stanie uchwycenia obiektu po
zako
ń
czeniu kucia
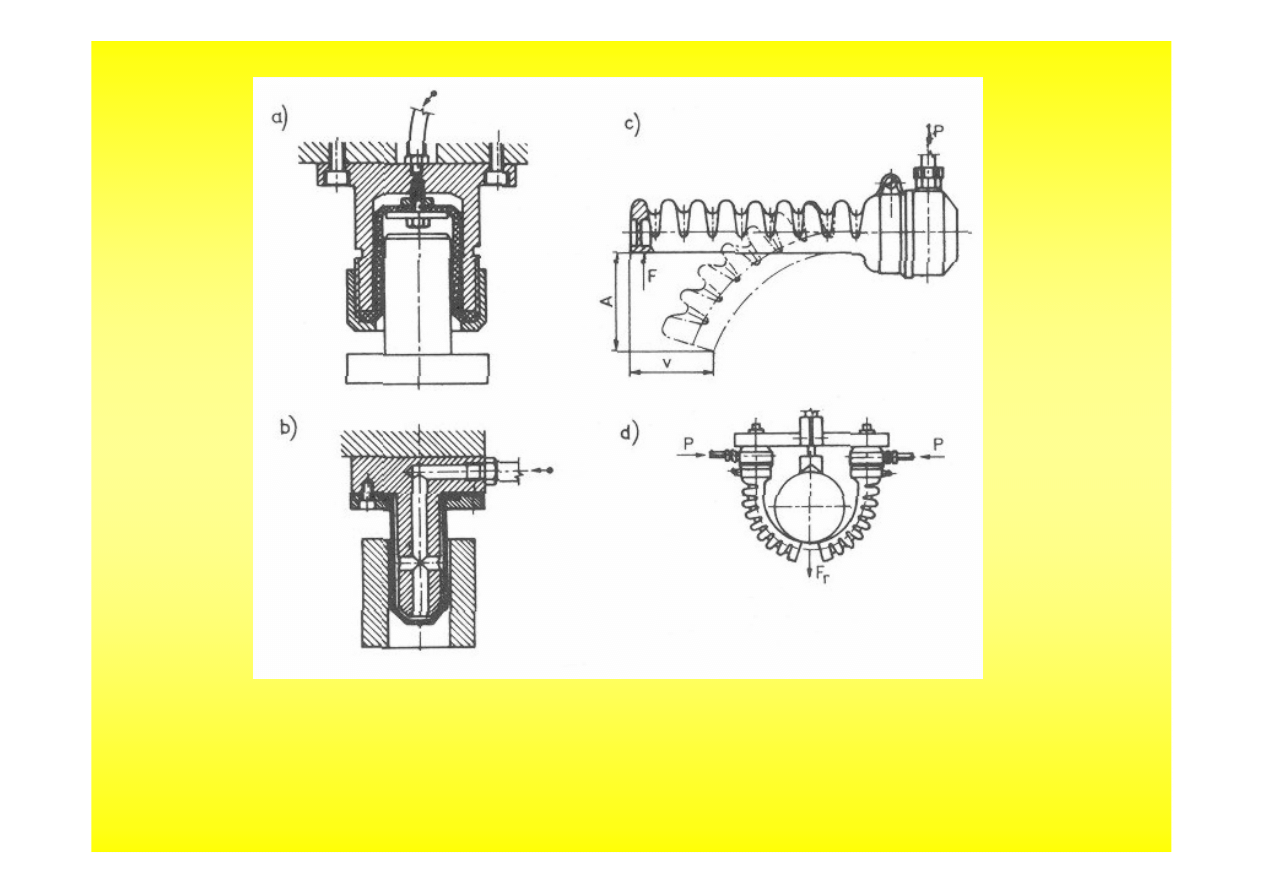
Rys. 8.11. Chwytaki z elastycznymi ko
ń
cówkami chwytnymi: a) do chwytania wałków,
b) do chwytania tulei, c) pojedyncza elastyczna ko
ń
cówka w stanie spoczynkowym i
roboczym (linia przerywana), d) przykład zastosowania do chwytania wałków
Rys. 8.12. Konstrukcja chwytaka wykorzystuj
ą
cego
efekt pami
ę
ci kształtu: 1-ko
ń
cówki chwytne wykonane
ze stopu Cu-Zn-Al, 2-spr
ęż
yna naciskowa, 3-nakładki
chwytne
Dobór chwytaka mechanicznego siłowego
Dobór chwytaka siłowego jako produktu z konkretnej firmy wymaga liczenia sił.
Dlatego najlepszym przedstawieniem dobóru chwytaka b
ę
dzie przykładowe zadanie:
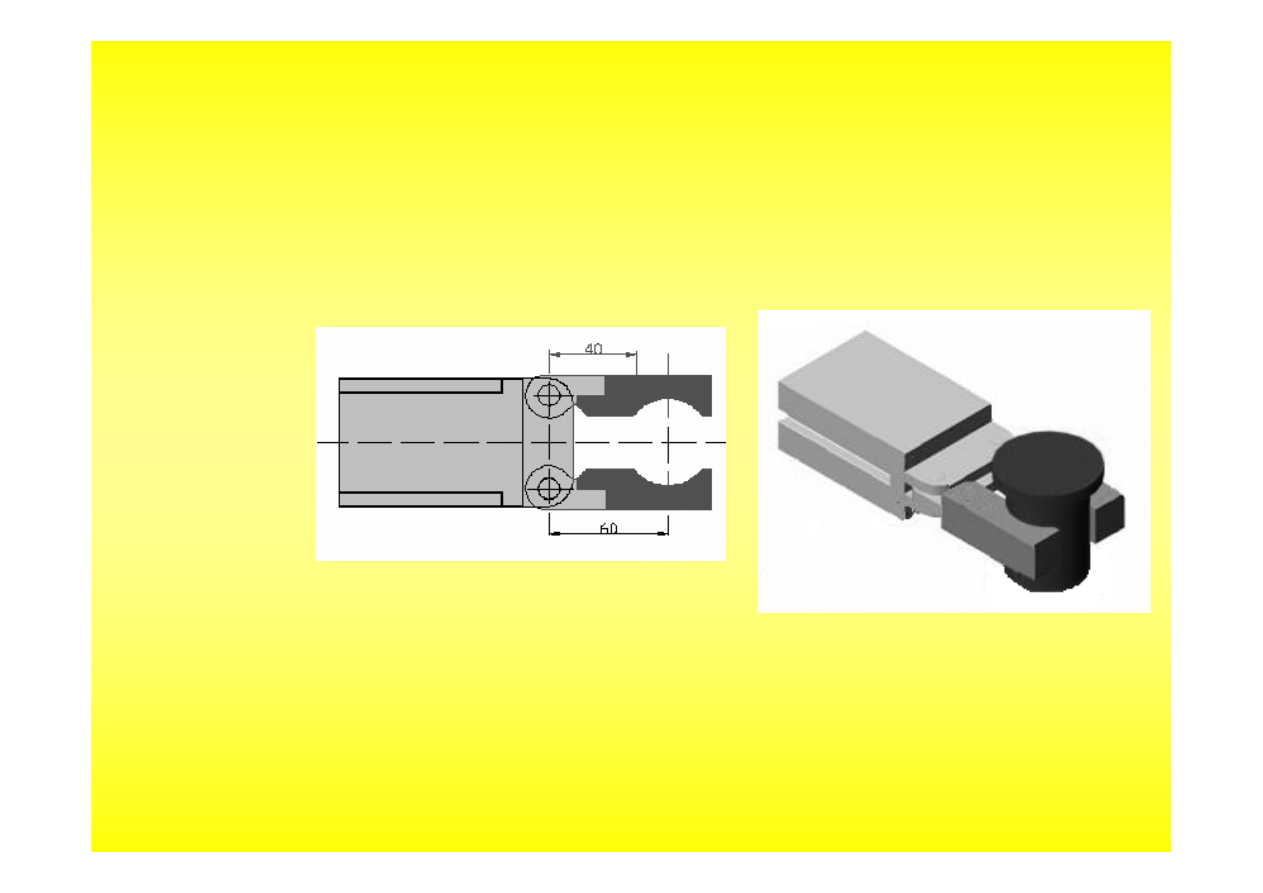
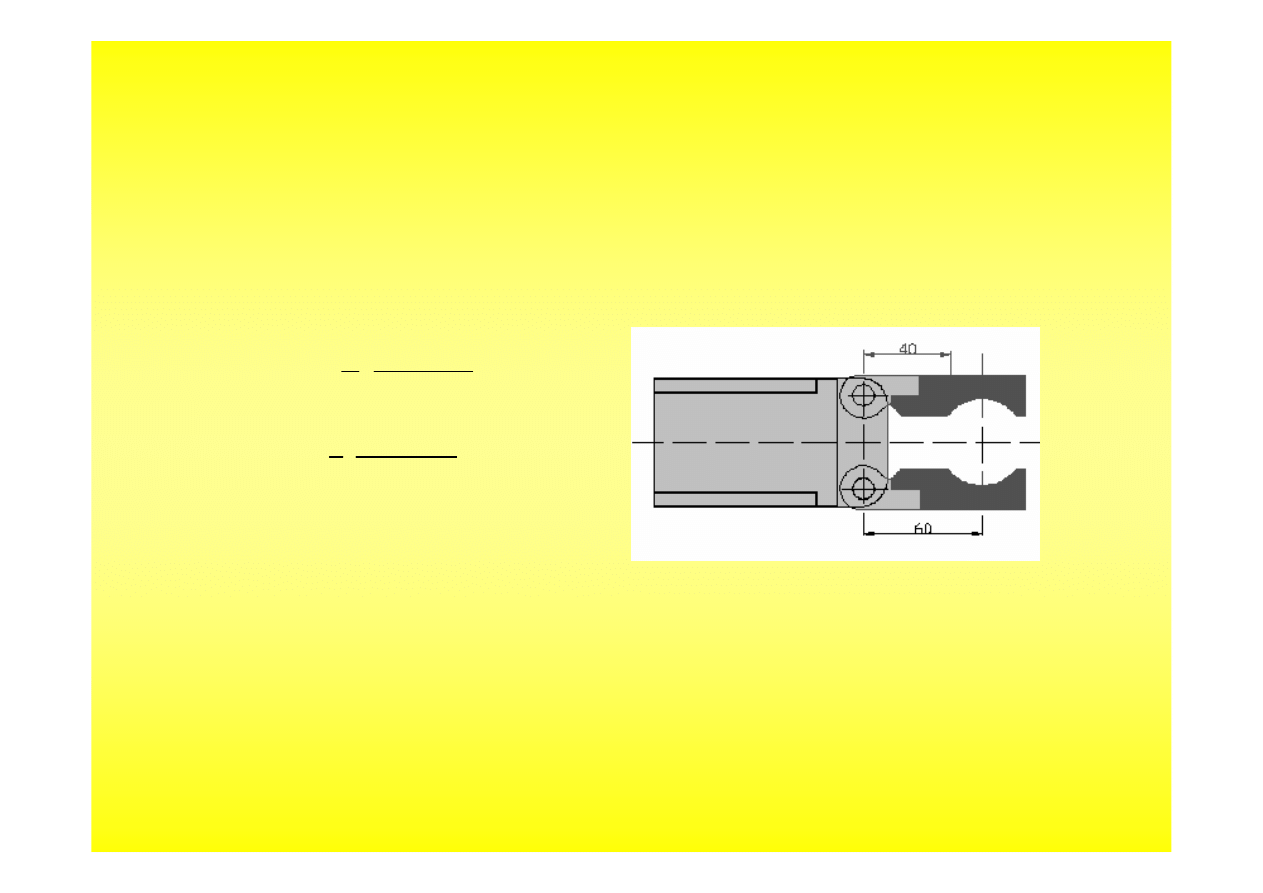
Dobra
ć
chwytak siłowy pneumatyczny w taki sposób, mo
ż
liwy był transport przedmiotu z
palety na stanowisko monta
ż
u w pozycji takiej jak na rysunku obok. Dane do zadania
przedstawione s
ą
poni
ż
ej.
Dane:
Przy
ś
pieszenie ziemskie:
g = 9.81 [ m/s]
Masa przedmiotu:
m = 0,2 [kg]
Masa ko
ń
cówki chwytnej:
m = 0.06 [kg]
Odległo
ść ś
rodka ko
ń
cówki chwytnej:
r = 60 [mm]
Ś
rodek ci
ęż
ko
ś
ci ko
ń
cówki chwytnej:
x = 40 [mm]
Masowy moment bezwładno
ś
ci:ko
ń
cówki chwytnej:
J = 3 x 10-4 [kg x m2]
Ci
ś
nienie robocze:
p = 600 [kPa]
Współczynnik bezpiecze
ń
stwa:
s = 4
Tarcie pomi
ę
dzy detalem a ko
ń
cówk
ą
µ
= 0.2
Zadanie mo
ż
na rozwi
ą
za
ć
na dwa sposoby, jeden z nich to zaprojektowa
ć
własny
chwytak przeznaczony na swoje potrzeby, lecz jest to kosztowne i czasochłonne. Dla tego
innym korzystniejszym rozwi
ą
zaniem jest zakup naszego chwytaka w firmie zajmuj
ą
cej si
ę
ich
sprzeda
żą
.. W zadaniu wykorzystano katalog firmy Schunk.
Pierwszy
krok
to
wybór
serii
chwytaków
odpowiednich
do
zadania
technologicznego. Po analizie dost
ę
pnych konstrukcji wybrano seri
ę
chwytaków LGR.
W kolejnym kroku wylicza si
ę
warto
ść
siły potrzebnej do utrzymania manipulowanego
przedmiotu w szcz
ę
kach chwytaka
µ
S
g
m
F
d
ch
⋅
⋅
⋅
=
2
1
2
.
0
4
81
.
9
2
.
0
2
1
⋅
⋅
⋅
=
ch
F
]
[
62
.
19
N
F
ch
=
Maj
ą
c wyliczon
ą
sił
ę
kocówek chwytnych i podan
ą
warto
ść
promienia ko
ń
cówek, na tej
podstawie wylicza si
ę
moment chwytaj
ą
cy
M
ch
= F
ch
r
M
ch
= 19.62 x 60 = 1177.2 [Nmm] = 117.7 [Ncm] = 11,77 [Nm]
Typ chwytaka
Moment chwytaj
ą
cy [Nm]
LGR 10-AS
0.36
LGR 16-AS
1.1
LGR 25-AS
5.4
LGR 32-AS
10.0
LGR 40-AS
15.0
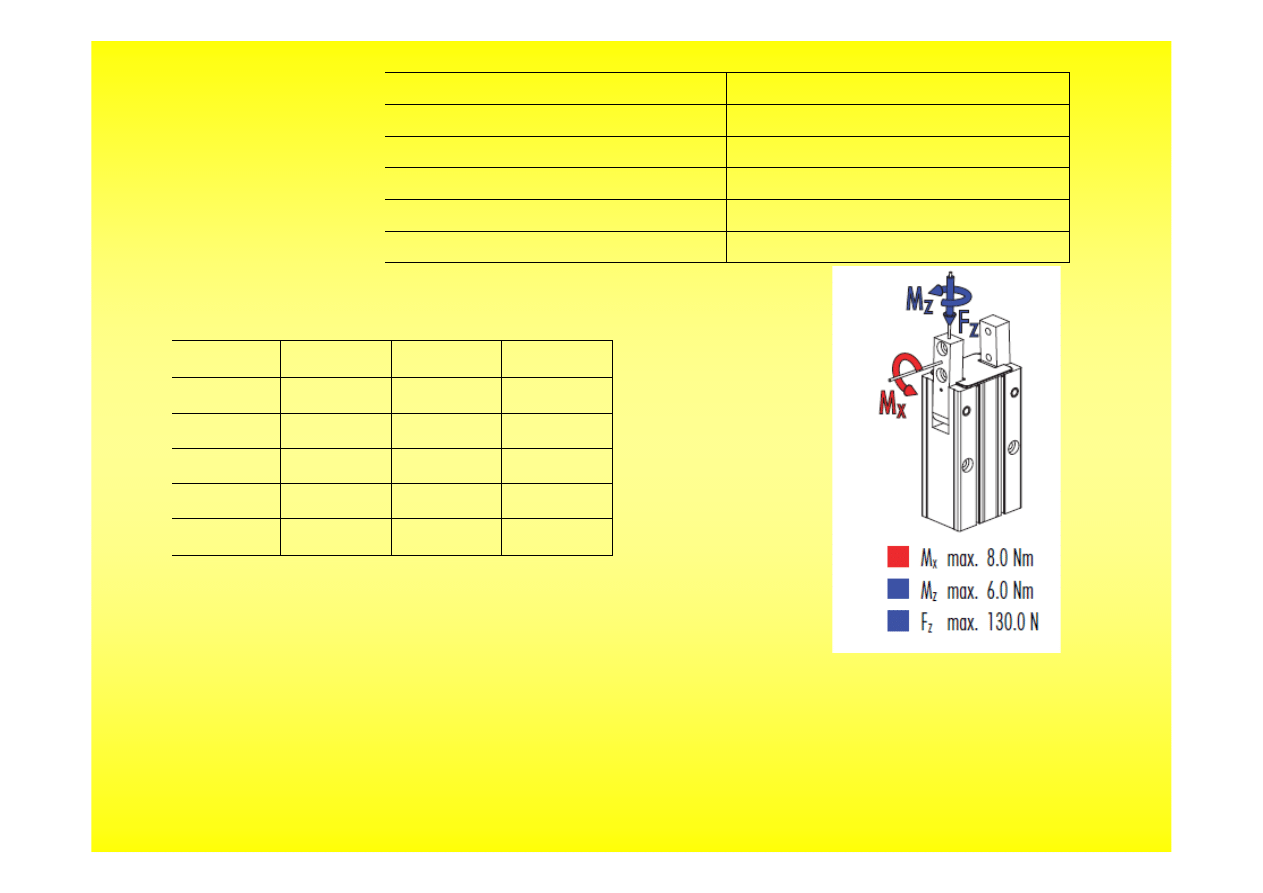
Maksymalne warto
ś
ci obci
ąż
e
ń
chwytaków serii LGR
Typ
Mx [Nm]
Mz [Nm]
Fz[Nm]
LGR 10-AS 0.5
0.5
18.0
LGR 16-AS 1.5
1.1
35.0
LGR 25-AS 3.7
2.5
58.0
LGR 32-AS 5.5
3.9
80.0
LGR 40-AS 8.0
6.0
130.0
Na podstawie tabeli przedstawiaj
ą
cej warto
ś
ci momentów
chwytaj
ą
cych jak i warto
ś
ci obliczonej mo
ż
na stwierdzi
ć
i
ż
najbli
ż
sza warto
ść
momentu M wi
ę
ksza od obliczonej warto
ś
ci
momentu M
ch
jest dla chwytaka LGR 40-AS. Po przyj
ę
ciu
chwytaka i sprawdzeniu pozostałych zało
ż
e
ń
zawartych w
tabeli (maksymalne warto
ś
ci obci
ąż
e
ń
chwytaków), nale
ż
y
wykona
ć
obliczenia sprawdzaj
ą
ce.
max
_
max
_
]
[
57
.
1
81
.
9
)
2
.
0
2
1
06
.
0
(
)
2
1
(
]
[
130
statyczne
statyczne
d
c
statyczne
statyczne
F
F
N
g
m
m
F
N
F
〈
=
⋅
⋅
+
=
+
=
=
Warunek spełniony
max
_
max
_
]
[
0824
.
0
]
[
4
.
82
81
.
9
)
60
2
.
0
2
1
40
06
.
0
(
)
2
1
(
]
[
0
.
8
statyczne
ststyczne
d
s
c
statyczne
statyczne
Mx
Mx
Nm
Nmm
g
r
m
x
m
Mx
Nm
Mx
〈
=
=
⋅
⋅
⋅
+
⋅
=
+
=
=
Warunek spełniony
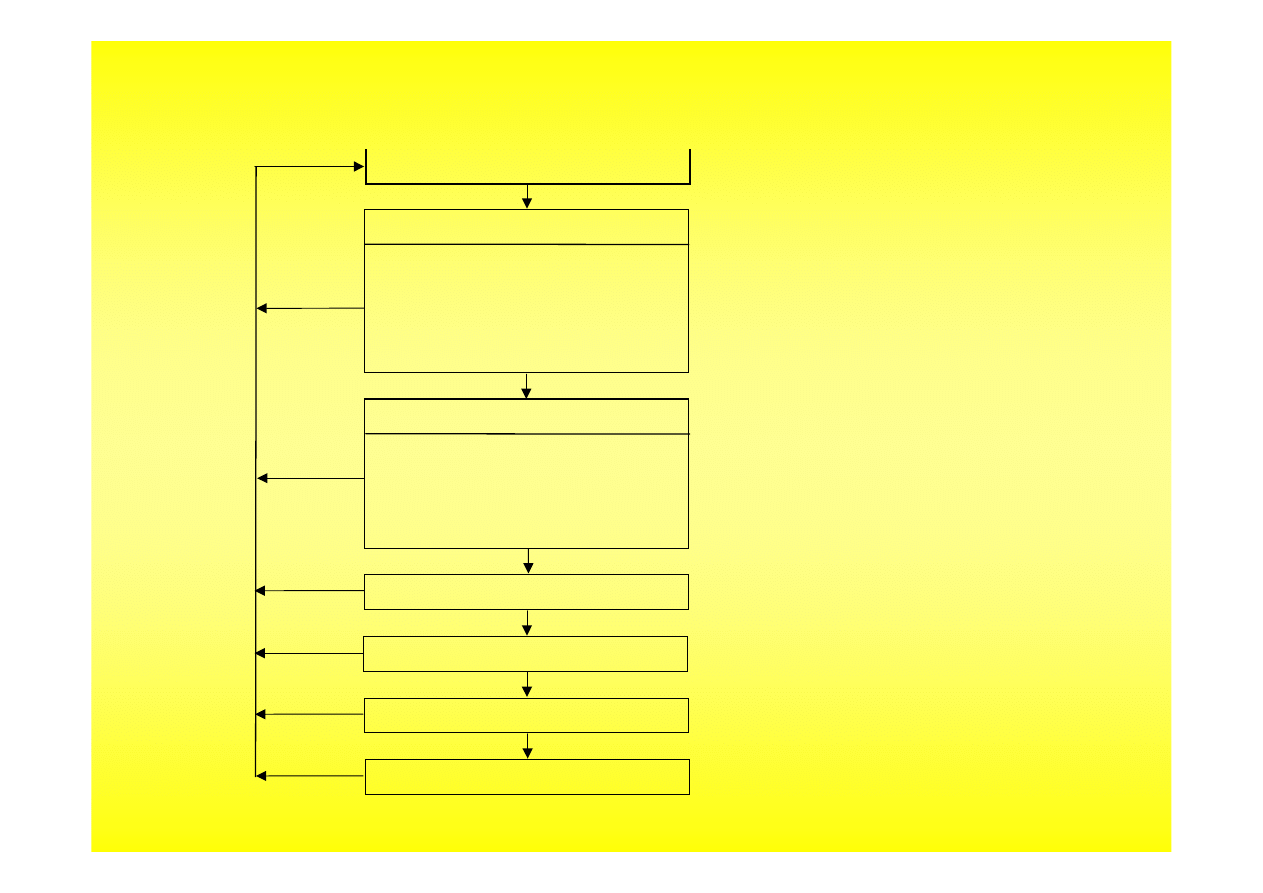
8.5. Projektowanie mechanizmów chwytaka
PRÓBY PRACĄ
CHWYTAK
DOKUMENTACJA KONSTRUKCYJNA
OBLICZENIA I ANALIZY
PROJEKT KONCEPCYJNY
rodzaj napędu
mechanizm ruchu
rodzaj i układ końcówek
komplety wymiennych nakładek
zakres ruchu końcówek
siła chwytu
DANE WEJŚCIOWE
maksymalna masa obiektu
wymiary przedmiotu (rodziny):
przed obróbką
po obróbce
liczba chwytanych obiektów
sposób chwytania
sposób uwalniania
KONFIGURACJA STANOWISKA PRACY
Rys. 8.13. Algorytm projektowania
chwytaków
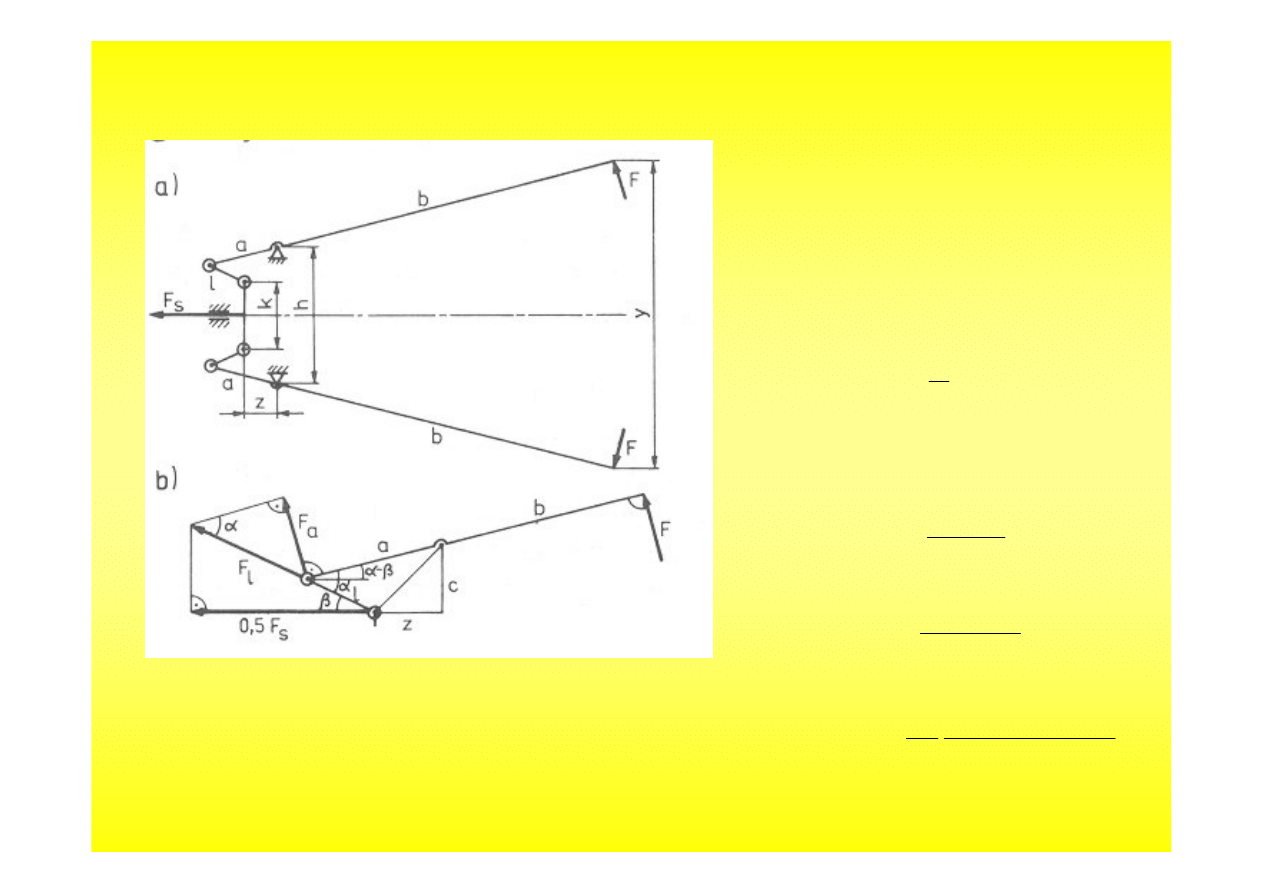
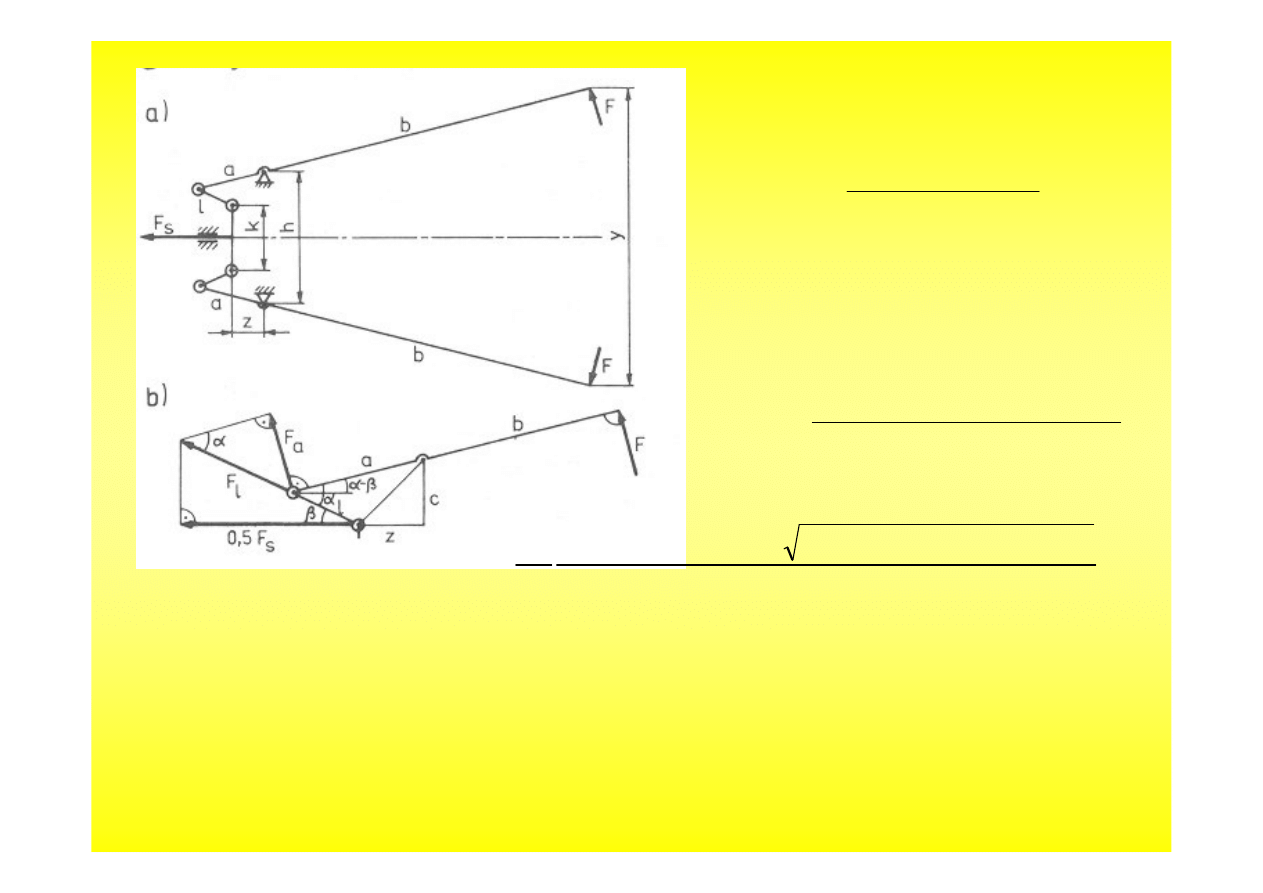
8.5.2. Przykład obliczania mechanizmu chwytaka ze sztywnymi ko
ń
cówkami
S
F
F
)
x
(
f
F
⋅
=
x
)
x
(
f
y
p
⋅
=
a
F
b
a
F
=
α
=
sin
F
F
1
a
β
=
cos
2
F
F
S
1
S
F
cos
b
2
sin
a
F
β
α
=
S
F
)
+
(
cos
cos
sin
b
2
a
F
β
α
β
α
=
Rys. 8.14. Wyznaczenie sił i przemieszcze
ń
w mechanizmie
chwytaka ze sztywnymi ko
ń
cówkami: a) schemat
kinematyczny, b) rozkład sił w wybranym fragmencie
mechanizmu: F, F, F, F- siły w mechanizmie chwytaka,
αααα
,
ββββ
-
k
ą
ty mi
ę
dzy odpowiednimi członami mechanizmu, a, b, c, l,
h, k, z - parametry konstrukcyjne chwytaka, y - odległo
ść
mi
ę
dzy czubkami ko
ń
cówek chwytnych
)
k
h
(
5
,
0
c
−
=
l
a
2
c
z
l
a
cos
2
2
2
2
−
−
+
=
α
z
cos
l
)
(
cos
a
+
β
=
β
−
α
α
β
+
β
−
α
=
sin
l
)
sin(
a
c
α
−
+
α
α
=
β
cos
l
a
2
l
a
1)
-
cos
(a
z
+
sin
c
a
cos
2
2
S
2
2
2
2
2
2
2
2
2
F
l)]
-
sin
(a
z
+
sin
c
[a
l
a
2
)
c
-
z
l
+
(a
-
l
a
4
)
cos
l
a
2
l
(a
b
2
a
F
α
α
−
α
−
+
=
)
sin(
b
2
h
r
β
−
α
+
=
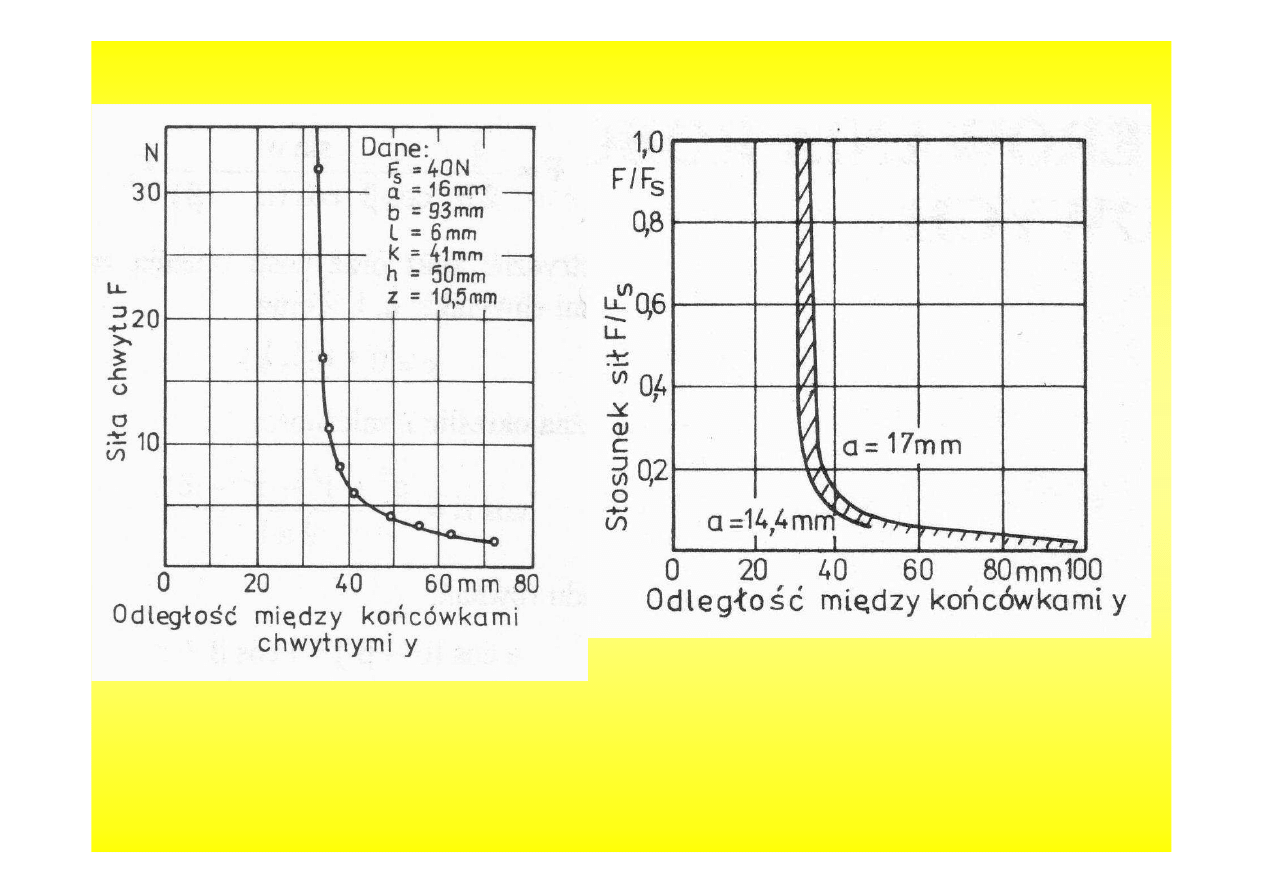
Rys. 8.15. Charakterystyka statyczna
przykładowego rozwi
ą
zania chwytaka ze
sztywnymi ko
ń
cówkami - dla parametrów
konstrukcyjnych podanych na rysunku
Rys. 8.16. Wpływ długo
ś
ci ramienia a na
przebieg charakterystyki statycznej chwytaka
z rys. 8.14
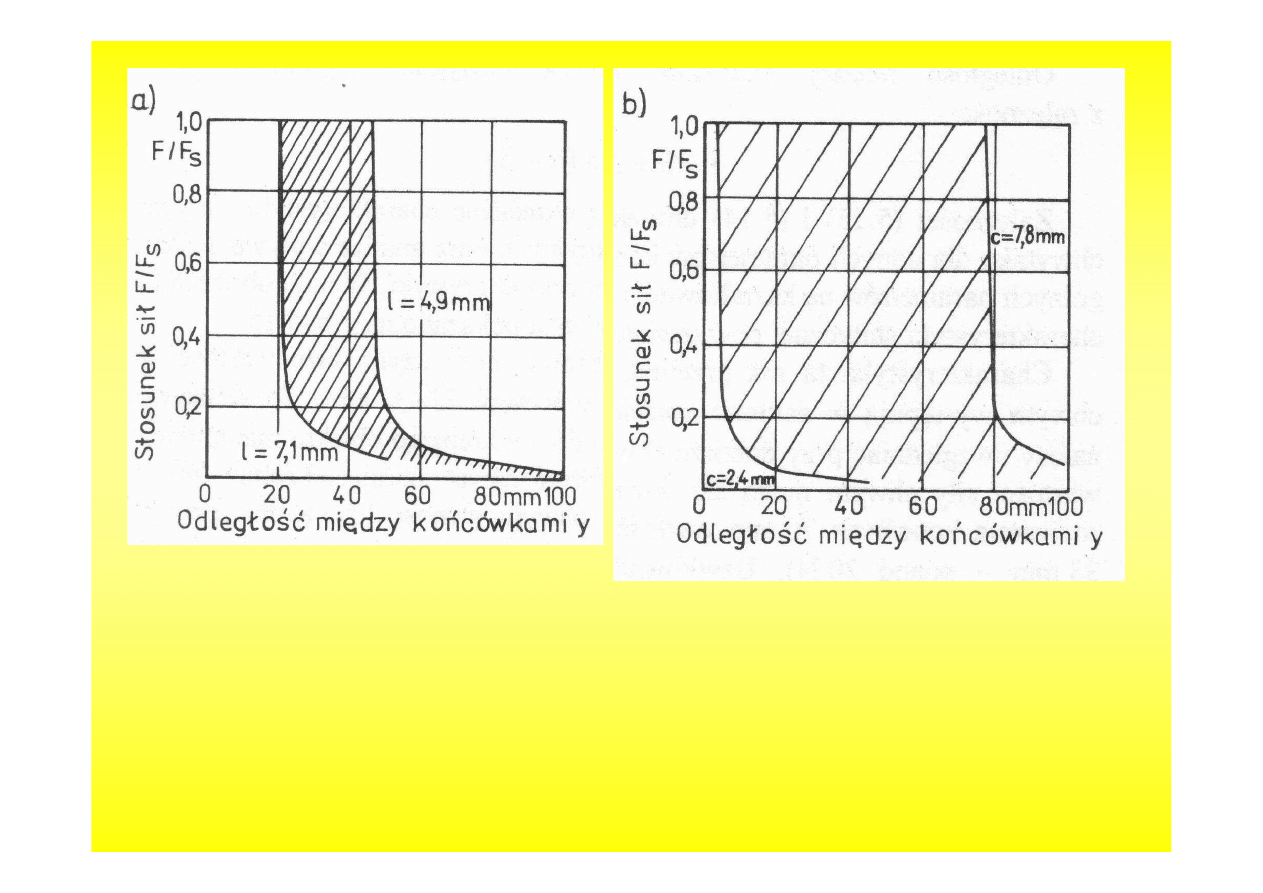
Rys. 8.16. Wpływ długo
ś
ci na przebieg charakterystyki statycznej chwytaka z rys. 8.14: a)
ł
ą
cznika l, b) długo
ś
ci rozstawienia jarzma i prowadnicy (wymiar c)
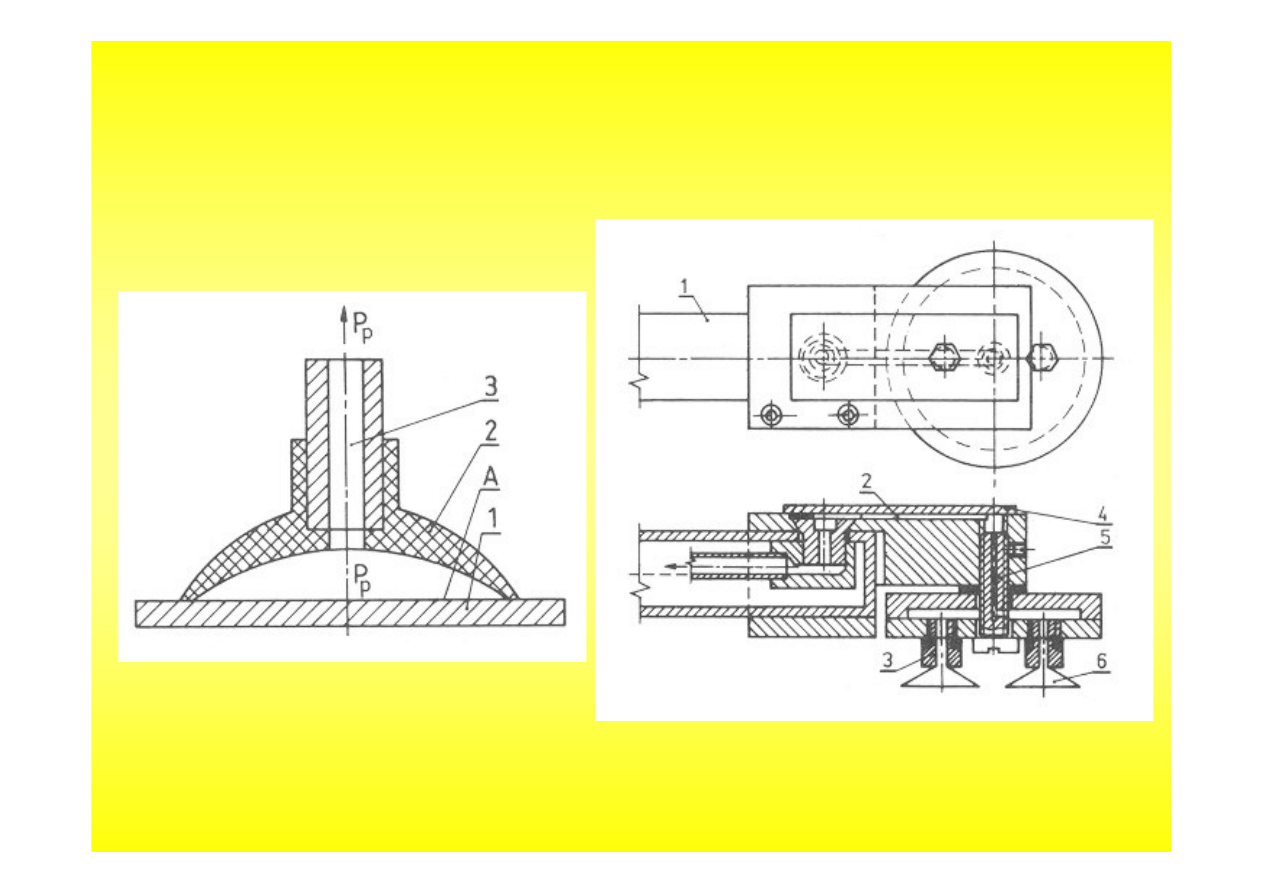
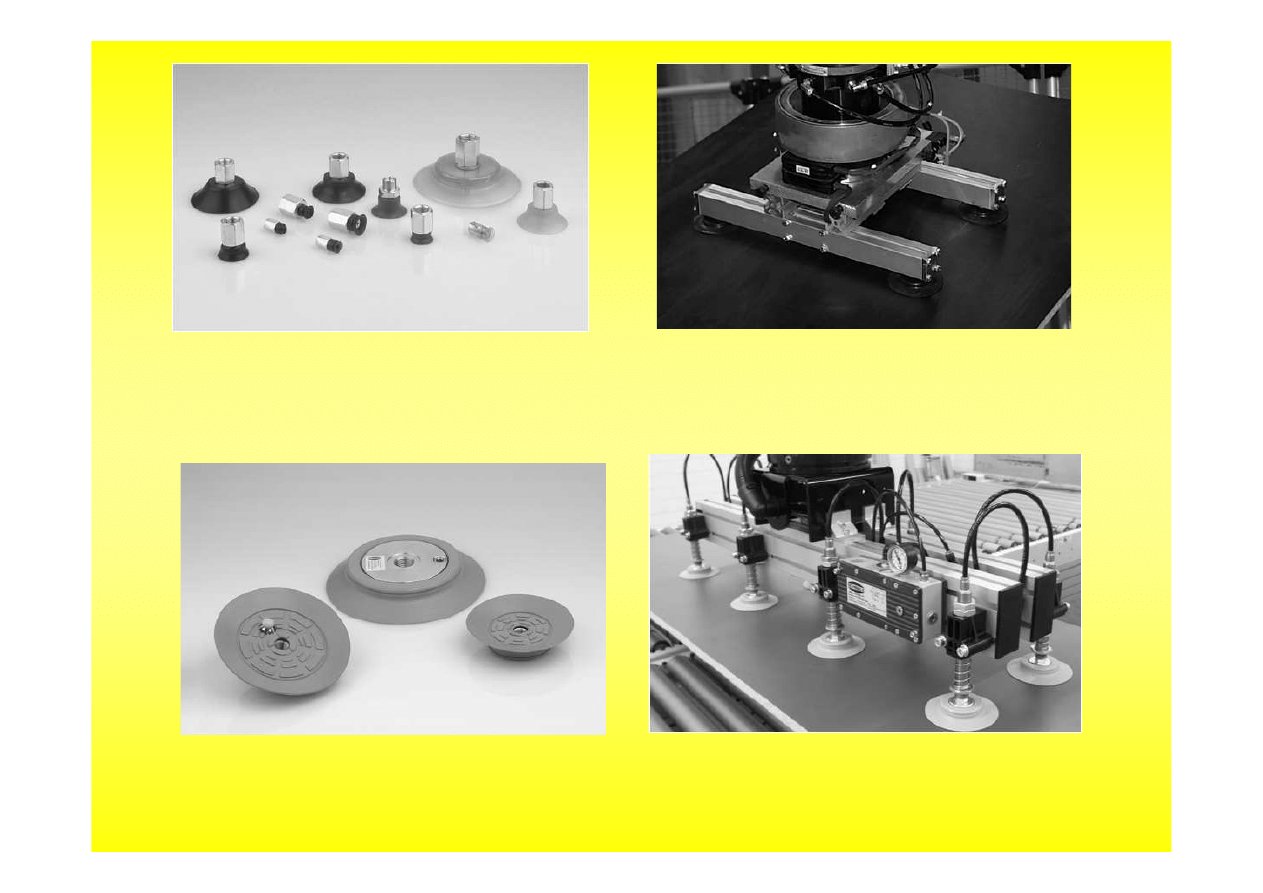
Chwytaki podci
ś
nieniowe
Rys. 8.4. Zasada budowy chwytaka
pró
ż
niowego; 1-obiekt manipulowany,
2-elastyczna przyssawka o kształcie
czaszy, 3-kolektor pró
ż
niowy, A-strefa
podci
ś
nienia
Rys. 8.5. Chwytak pró
ż
niowy do arkuszy blach z
dwoma przyssawkami: 1-rami
ę
robota, 2-komora
powietrzna, 3-uchwyt przyssawki, 4-pokrywa, 5-
ś
ruba
nastawcza, 6-przyssawka
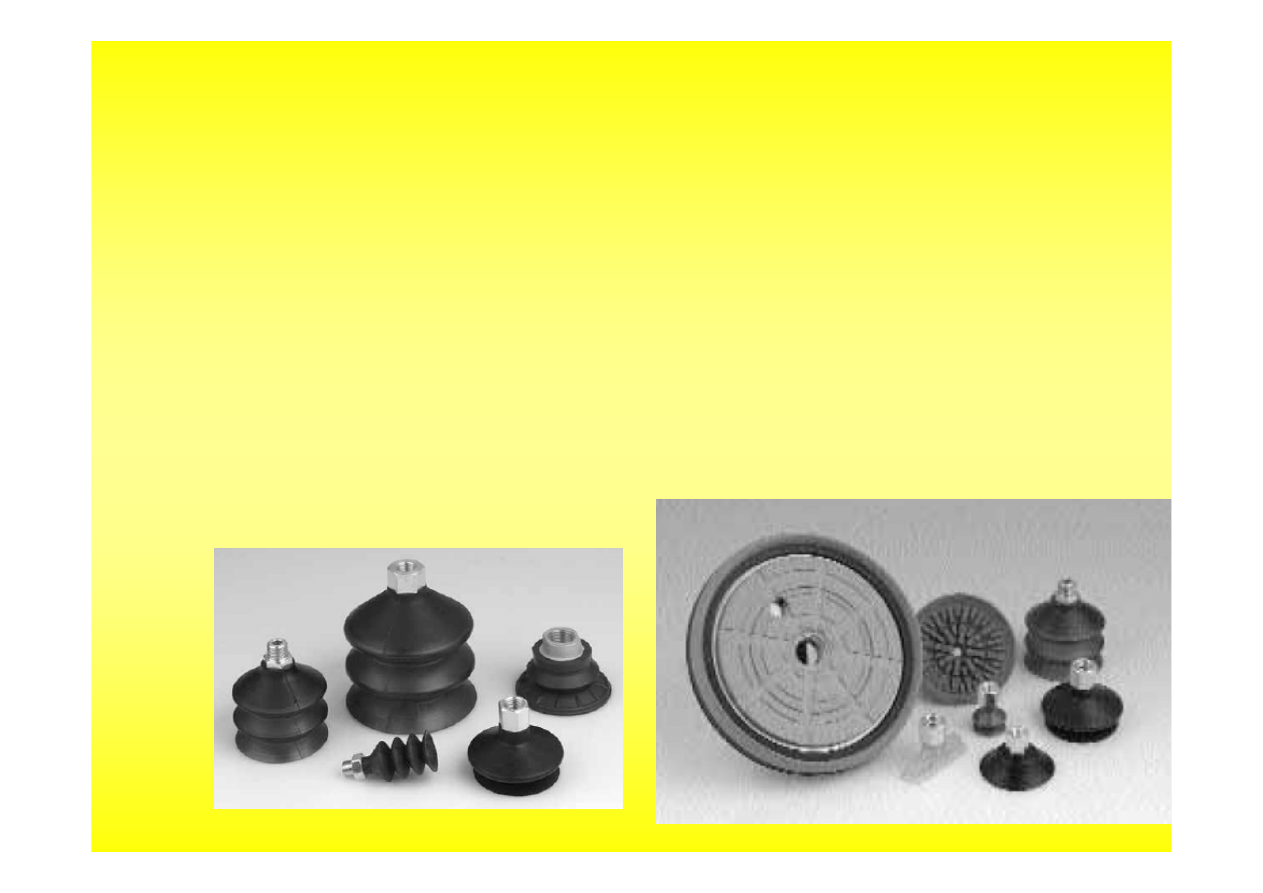
Rys. Przyssawka płaska typu PFYN i jej zastosowanie w chwytaku krzy
ż
owym do laminowanych płyt wiórowych
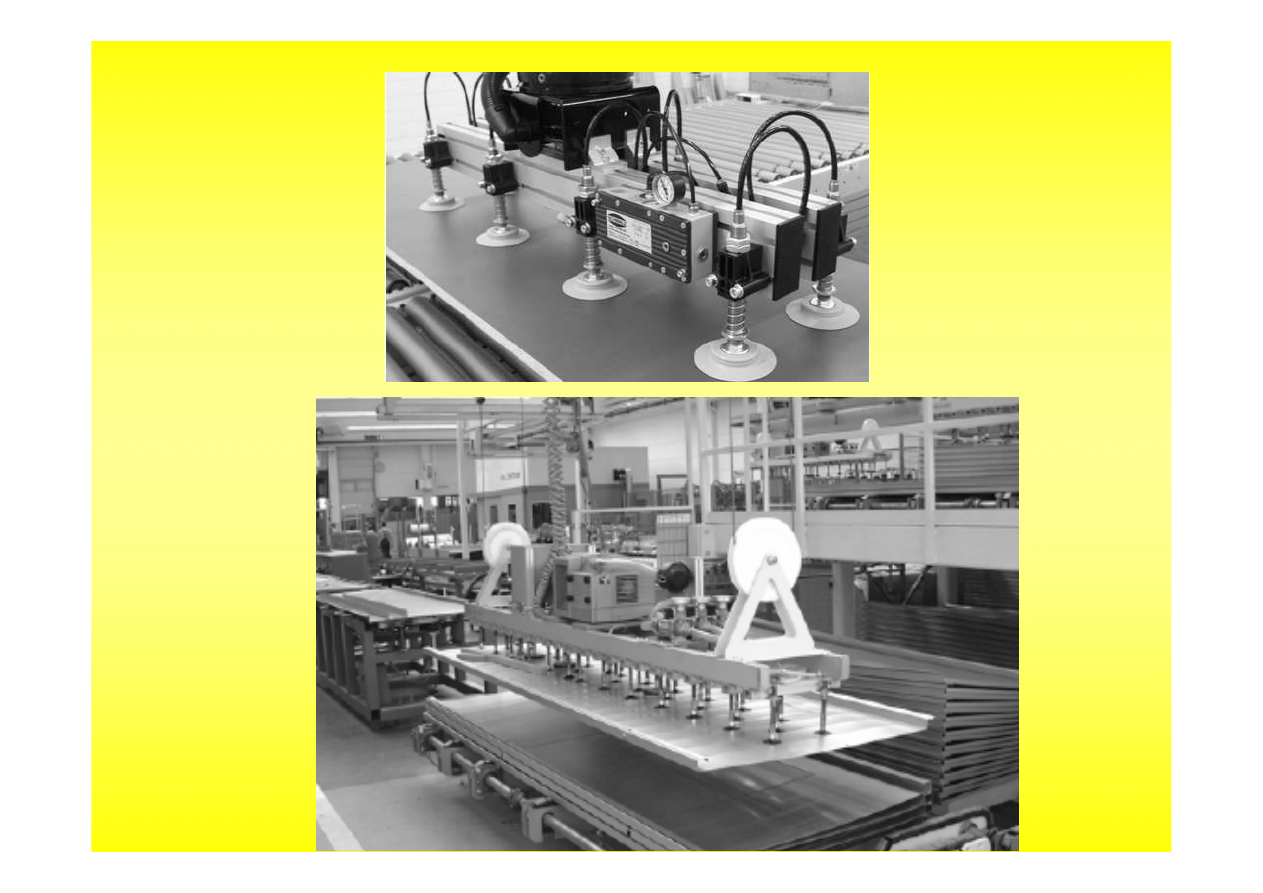
Rys. Przyssawki SPU, Chwytak podci
ś
nieniowy do transportu płyt wiórowych
Dane techniczne płaskich przyssawek PFYN
Typ
Siła
przyssania [N]
Obj
ę
to
ść
[cm]
Min.
promie
ń
krzywizny
pow. [mm]
Zalecana
ś
rednica
przewodu
[mm]
Rodzaj
nypli
PFYN 1
0,03
0,001
2
2
N 001
PFYN 1.5
0,06
0,001
4
2
N 002
PFYN 2
0,12
0,001
2
2
N 003
PFYN 3.5
0,42
0,002
2
2
N 003
PFYN 5
0,75
0,005
4
2
N 004
PFYN 6
1,20
0,008
4
2
N 004
PFYN 8
2,30
0,030
5
2
N 004
PFYN 10
4,00
0,070
6
2
N 004
PFYN 15
9,00
0,400
9
4
N 005
PFYN 20
15,50
0,800
13
4
N 006
PFYN 25
26,50
1,300
18
4
N 007
PFYN 30
34,00
1,300
26
4
N 007
PFYN 35
44,00
2,700
31
4
N 007
PFYN 40
57,70
3,800
37
4
N 007
Przyssawki płaskie SPU
Zastosowanie:
•
Przemieszczanie elementów gładkich o du
ż
ych powierzchniach jak np. tafle szkła
czy płyty z tworzywa sztucznego
•
Seria SPU-B z wzmocnion
ą
warg
ą
uszczelniaj
ą
c
ą
umo
ż
liwia obsług
ę
porowatych
powierzchni w tym drewna
•
Seria SPU-AE z wbudowana funkcja odrzucania pozwala na podnoszenie cienkich
blach (adhezja pomi
ę
dzy blachami zostaje usuni
ę
ta)
•
Seria SPU-TV z czujnikiem kra
ń
cowym odł
ą
cza niepotrzebne przyssawki
zabezpieczaj
ą
c przed dostawaniem si
ę
niepotrzebnego powietrza
Zalety:
•
Uniwersalne wykonanie wargi uszczelniaj
ą
cej
•
Powierzchnia podparcia na spodniej stronie
•
Mała obj
ę
to
ść
własna
•
Szeroka oferta
ś
rednic
•
Optymalny kształt
Dane techniczne płaskich przyssawek SPU
Typ
Siła
przyssani
a [N]
Obj
ę
to
ść
[cm]
Min.
promie
ń
krzywizny pow.
[mm]
Zalecana
ś
rednica
przewodu [mm]
SPU 100 G1/4-IG
380
40
130
9
SPU 125 G1/4-IG
620
70
220
9
SPU 125 G1/4-IG TV 620
70
220
9
SPU 125 G1/4-IG AE 620
60
-
9
SPU 160 G1/2-IG
980
123
350
12
SPU 160 G1/2-IG
TV
980
123
350
9
SPU 160 G1/2-IG
AE
1800
110
-
12
SPU 210 G1/2-IG
1800
226
750
12
SPU 210 G1/2-IG B
1800
301
750
12
SPU 210 G1/2-IG TV 1800
226
750
9
SPU 210 G1/2-IG AE 2600
205
-
12
SPU 250 G1/2-IG
2600
332
-
12
SPU 250 G1/2-IG B
2600
488
-
12
SPU 250 G1/2-IG TV 3690
332
-
12

Przyssawki SPK
Zastosowanie:
•
Obsługa przedmiotów o silnie strukturalnej powierzchni, np. szkło ornamentowe, blacha
ryflowana
•
Seria SPK-TV z czujnikiem kra
ń
cowym odł
ą
cza niepotrzebne przyssawki zabezpieczaj
ą
c
przed dostawaniem si
ę
niepotrzebnego powietrza
Zalety:
•
Kraw
ę
d
ź
uszczelniaj
ą
ca wykonana z dopasowuj
ą
cego si
ę
chloroprenu, zwulkanizowana
z materiałem no
ś
nym, daje optymalne przyleganie do silnie strukturalnych powierzchni
•
Powierzchnia podparcia na spodniej stronie
•
Mała obj
ę
to
ść
własna
•
Szeroka oferta
ś
rednic
Budowa:
•
Trwała i odporna na
ś
cieranie przyssawka z dwuskładnikow
ą
kraw
ę
dzi
ą
uszczelniaj
ą
c
ą
•
Uszczelnienie mocowane jest pewnie na płycie no
ś
nej przy pomocy wyprofilowanego
zatrzasku
•
W przypadku nieszczelno
ś
ci, uszczelnienia wymienia si
ę
niezale
ż
nie
•
Spód płyty no
ś
nej jest całkowicie przykryty w celu osłony przedmiotu
•
Seria SPK-TV ma wbudowany czujnik kra
ń
cowy
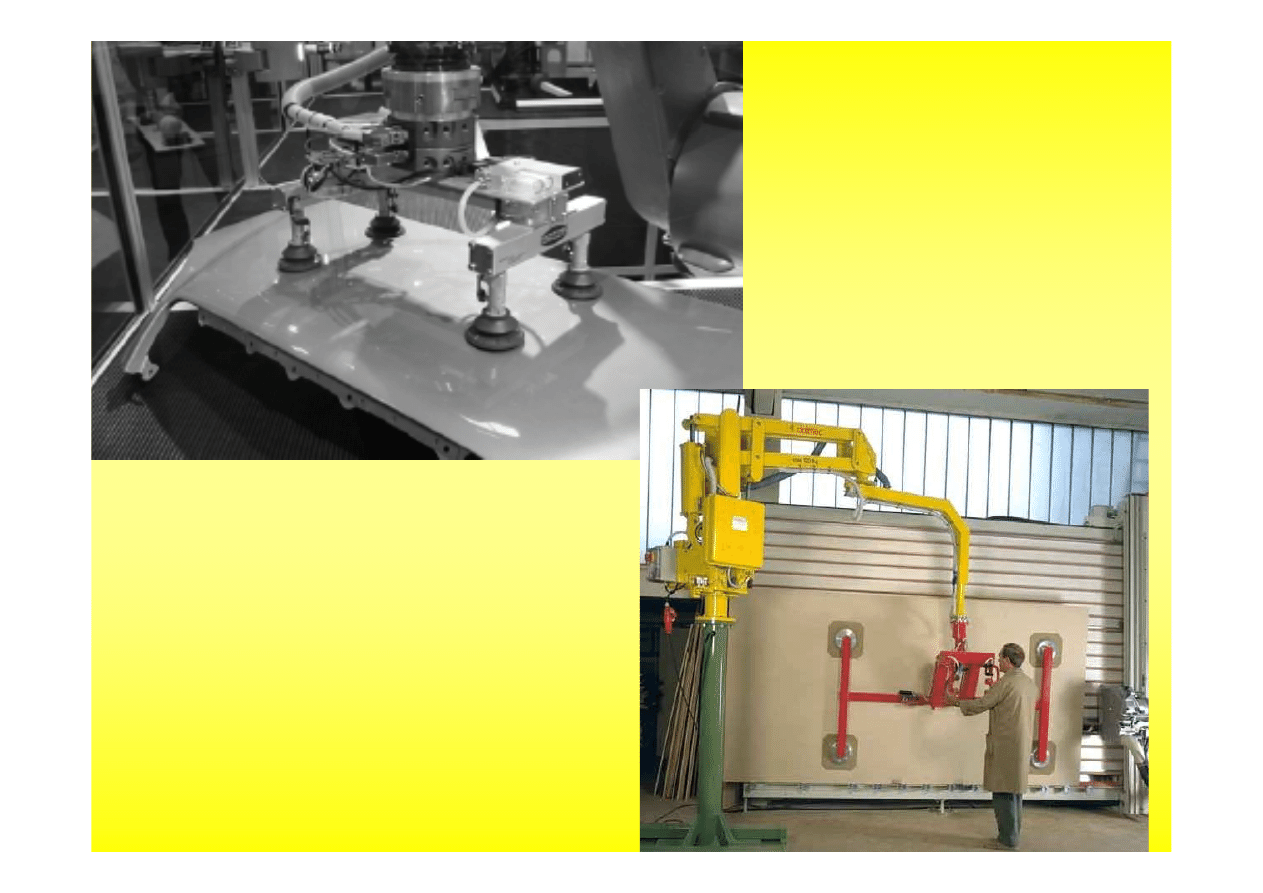
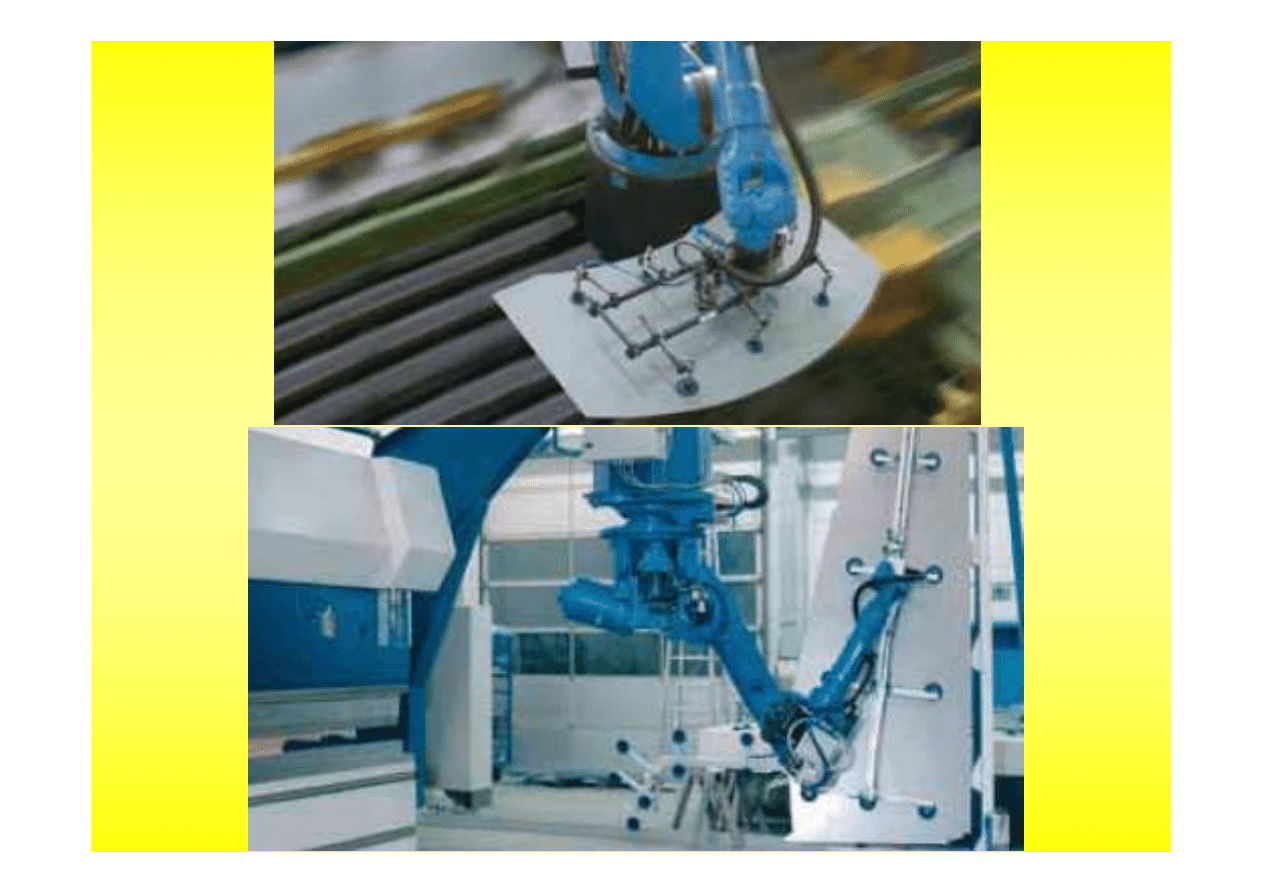
Do podnoszenia i przenoszenia gładkich płyt (w poziomie i pionie), których nie ma mo
ż
liwo
ś
ci
chwycenia za kraw
ę
d
ź
stosowane s
ą
chwytaki podci
ś
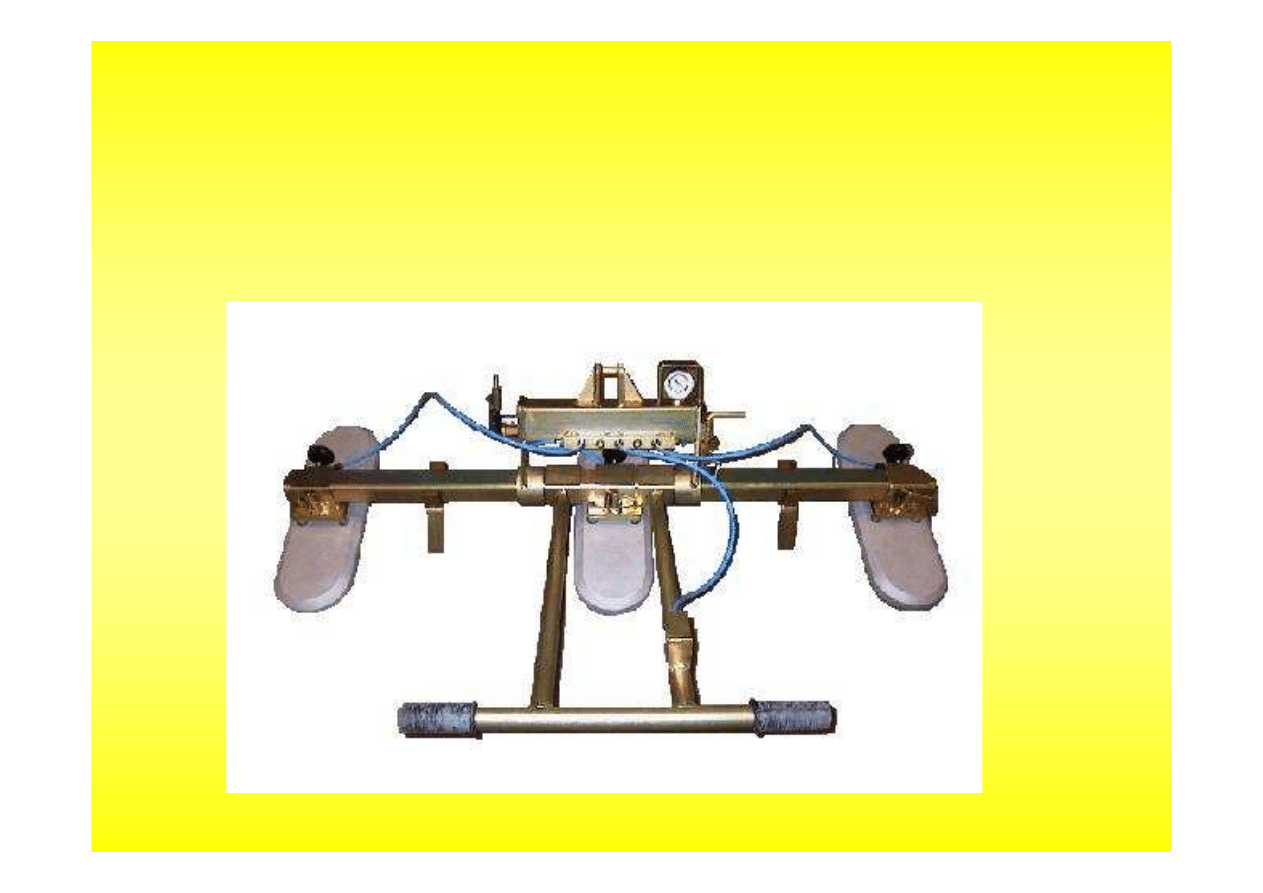
nieniowe.
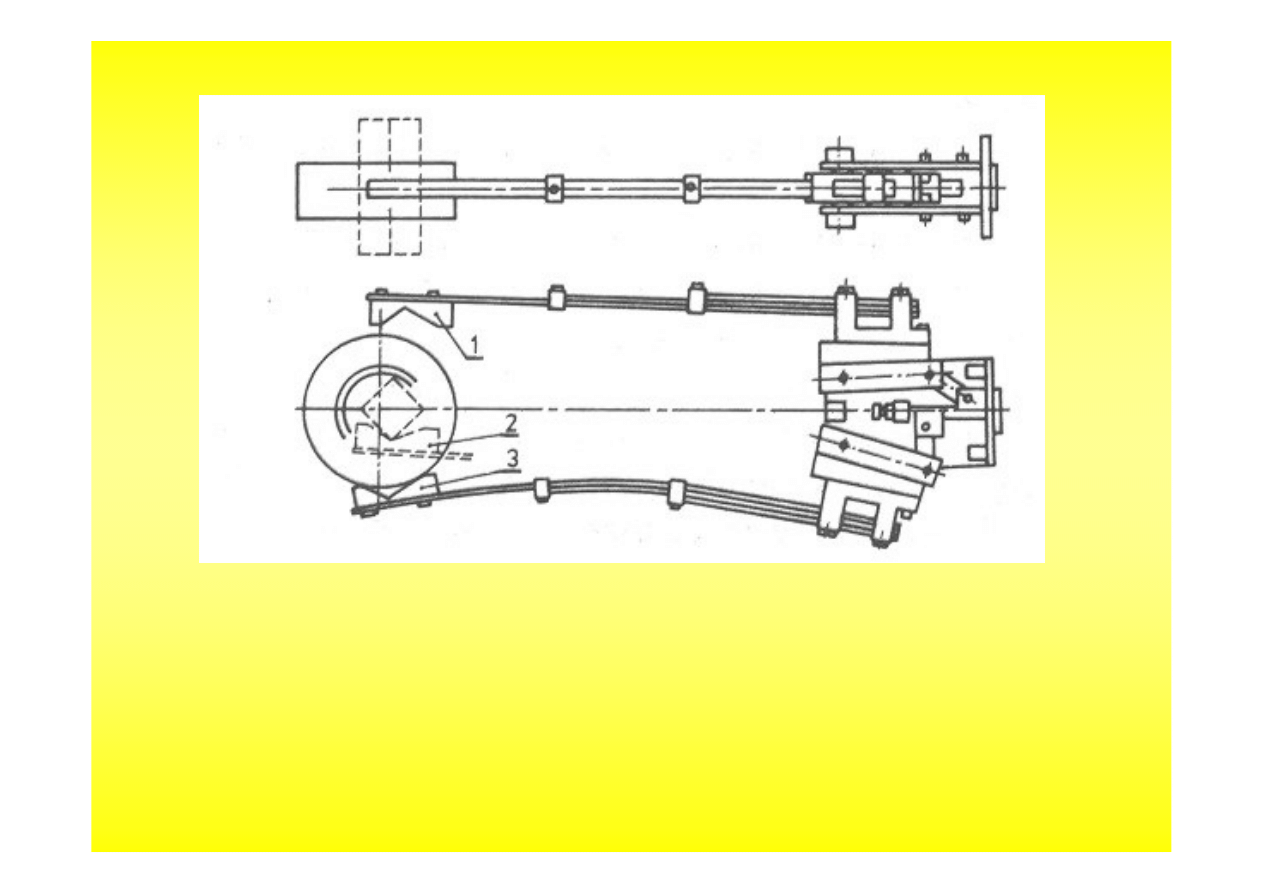
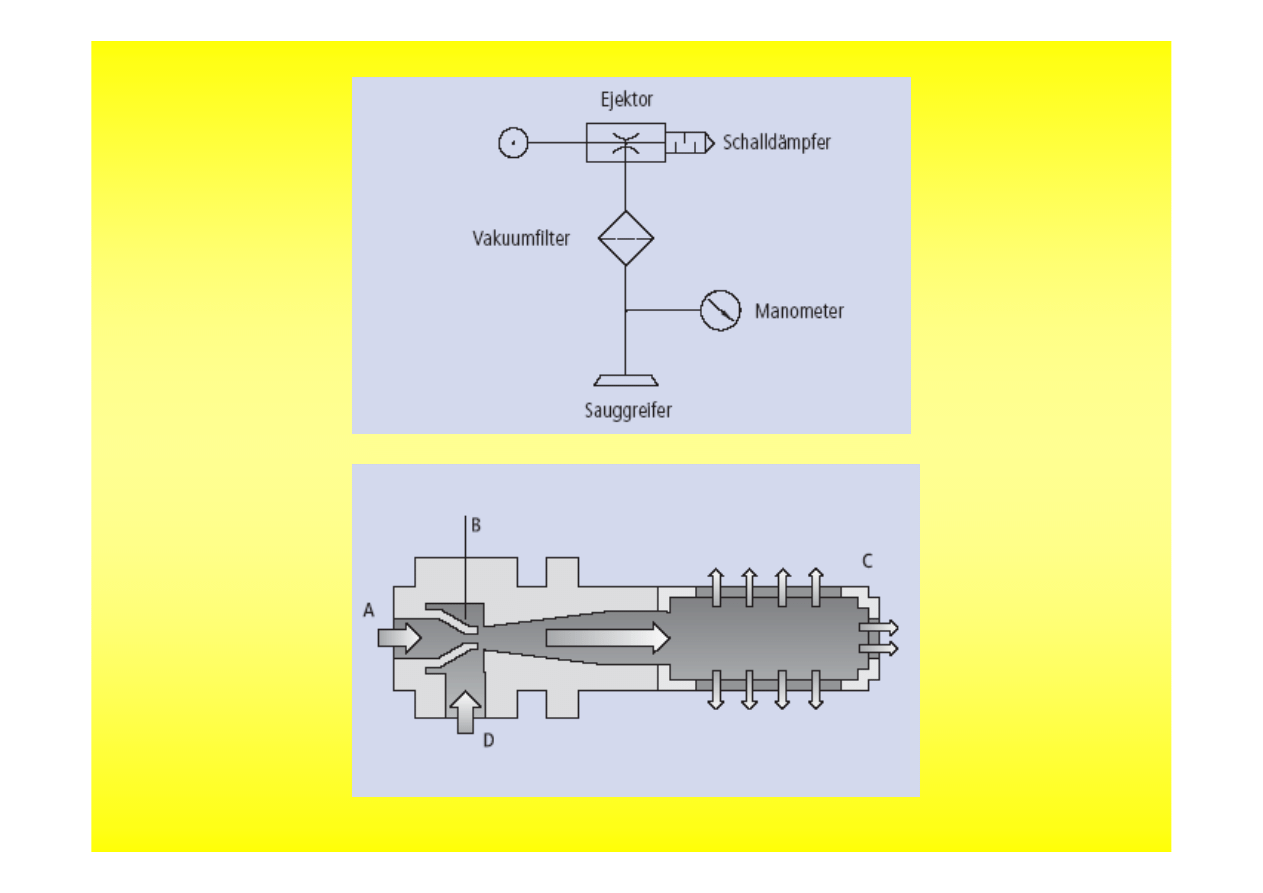
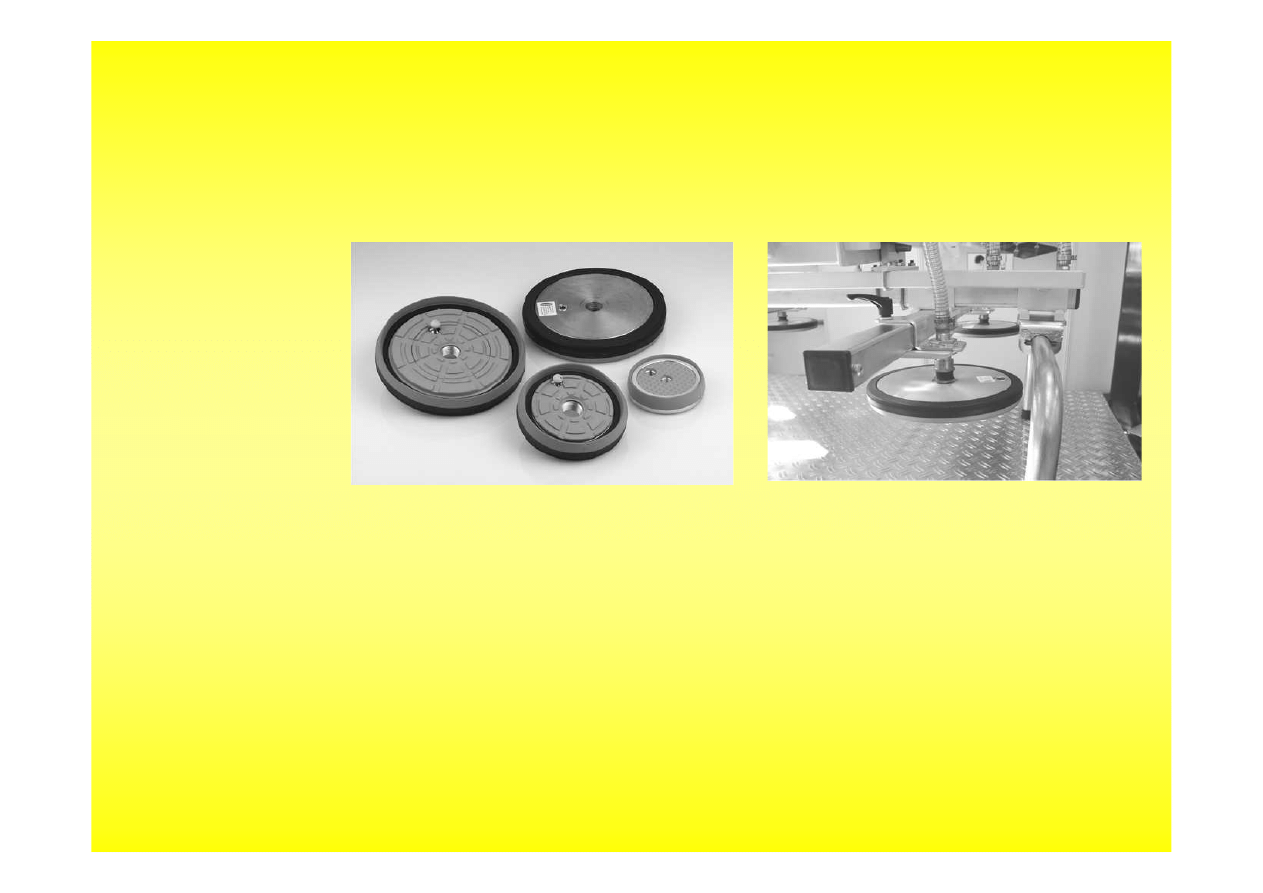
Chwytak podci
ś
nieniowy firmy WEH zawiera zintegrowane obwody zasilania, wytwarzania
podci
ś
nienia, sterowania oraz pomiaru podci
ś
nienia.
Dobór chwytaka podci
ś
nieniowego
Proces doboru chwytaka jest procesem który powinien si
ę
odbywa
ć
w
odpowiedniej kolejno
ś
ci. Przedstawiony zostanie na podstawie konkretnego przykładu:
Dane do oblicze
ń
:
Rodzaj elementu
Materiał:
blacha stalowa składowana na paletach
Powierzchnia:
gładka, równa, sucha
Wymiary:
długo
ść
max 2500 mm
szeroko
ść
max 1250 mm
grubo
ść
max 2.5 mm
Masa
około 61 kg
System obsługi
Proces przemieszczania:
poziomo-poziomo
Maksymalne przy
ś
pieszenia:
o
ś
X i Y: 5 m/s2
O
ś
Z: 5 m/s2
Czas cyklu:
30s
Przewidywany czas:
przyssania: <1s
puszczenia: <1s
Krok 1. Ustalenie siły trzymaj
ą
cej
Przyssawki
powinny
istnienie
sił
bezwładno
ś
ci,
których
w
zautomatyzowanej instalacji nie nale
ż
y w
ż
aden sposób ignorowa
ć
. Dla ułatwienia
oblicze
ń
przedstawiono poni
ż
ej trzy najwa
ż
niejsze i najcz
ęś
ciej stosowane przykłady
obci
ąż
e
ń
.
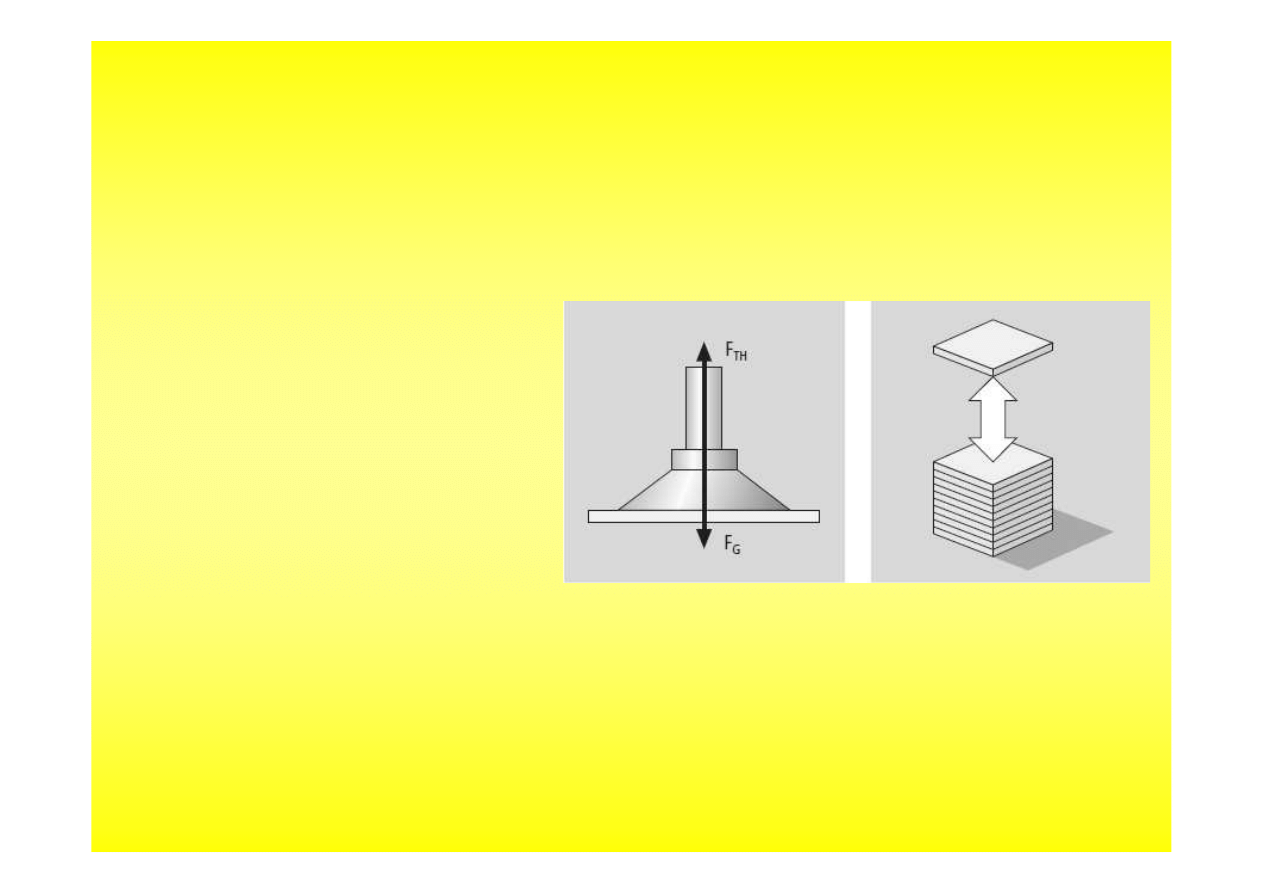
Przykład I – Przyssawki poziomo, siła działaj
ą
ca pionowo
F
TH
= m x (g + a) x S
F
TH
- teoretyczna siła trzymania [N]
m - masa [kg]
g - przyspieszenie ziemskie [9,81 m/s2]
a - przy
ś
pieszenie układu [m/s2]
S - współczynnik bezpiecze
ń
stwa (warto
ść
min. 150% bezpiecze
ń
stwa, w
przypadku elementów krytycznych, porowatych, niejednolitych 200% lub wi
ę
cej)
F
TH
= 61 x (9,81 + 5) x 1,5
F
TH
= 1363 N
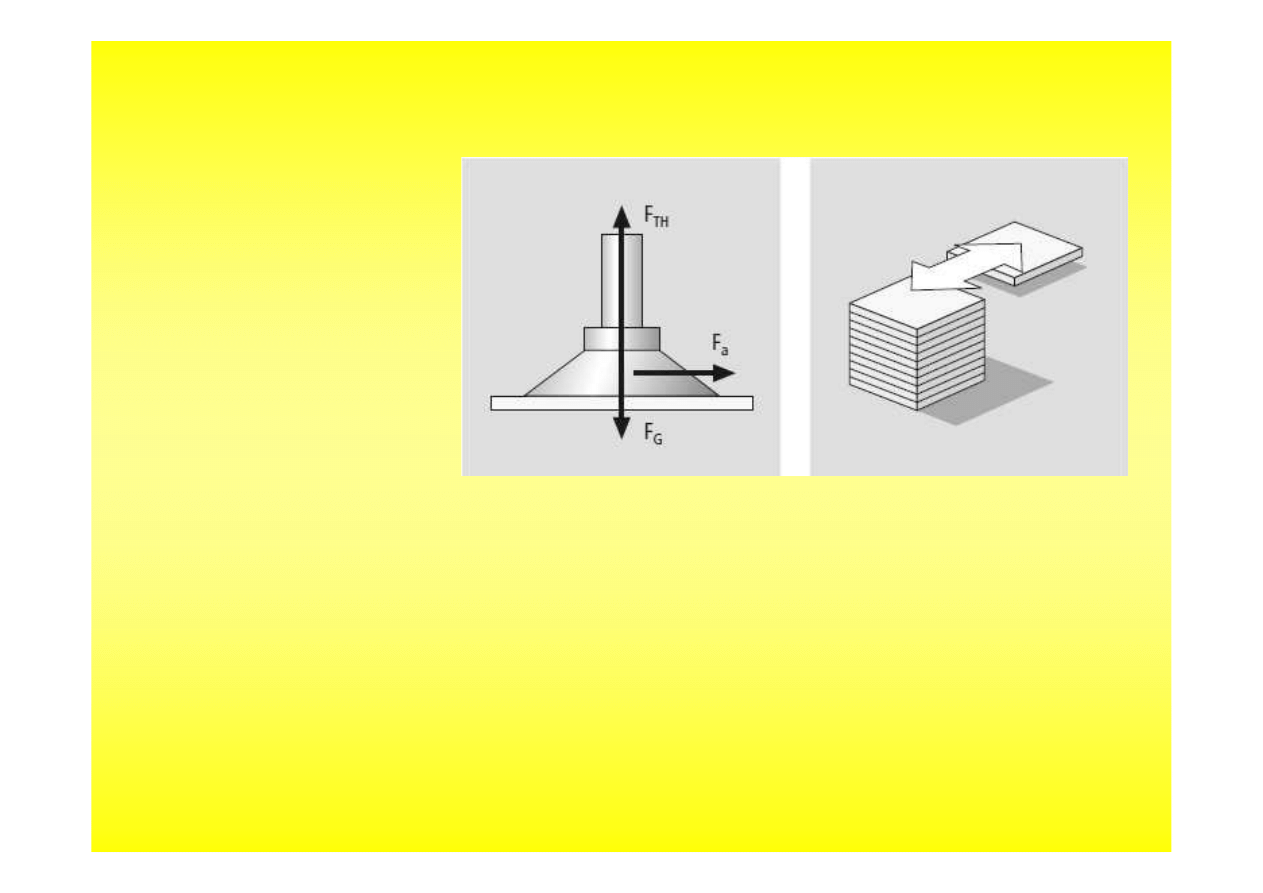
Przykład II – Przyssanie poziomo, a siła poziomo
F
TH
= m x (g + a/
µ
) x S
µ
- współczynnik tarcia:
= 0,1 dla zaolejonej powierzchni
= 0,2 … 0,3 do mokrych powierzchni
= 0,5 do drewna, metalu, szkła, kamienia
= 0,6 do porowatych powierzchni
F
TH
= 61 x (9,81 + 5/ 0,5) x 1,5
F
TH
= 1822 N
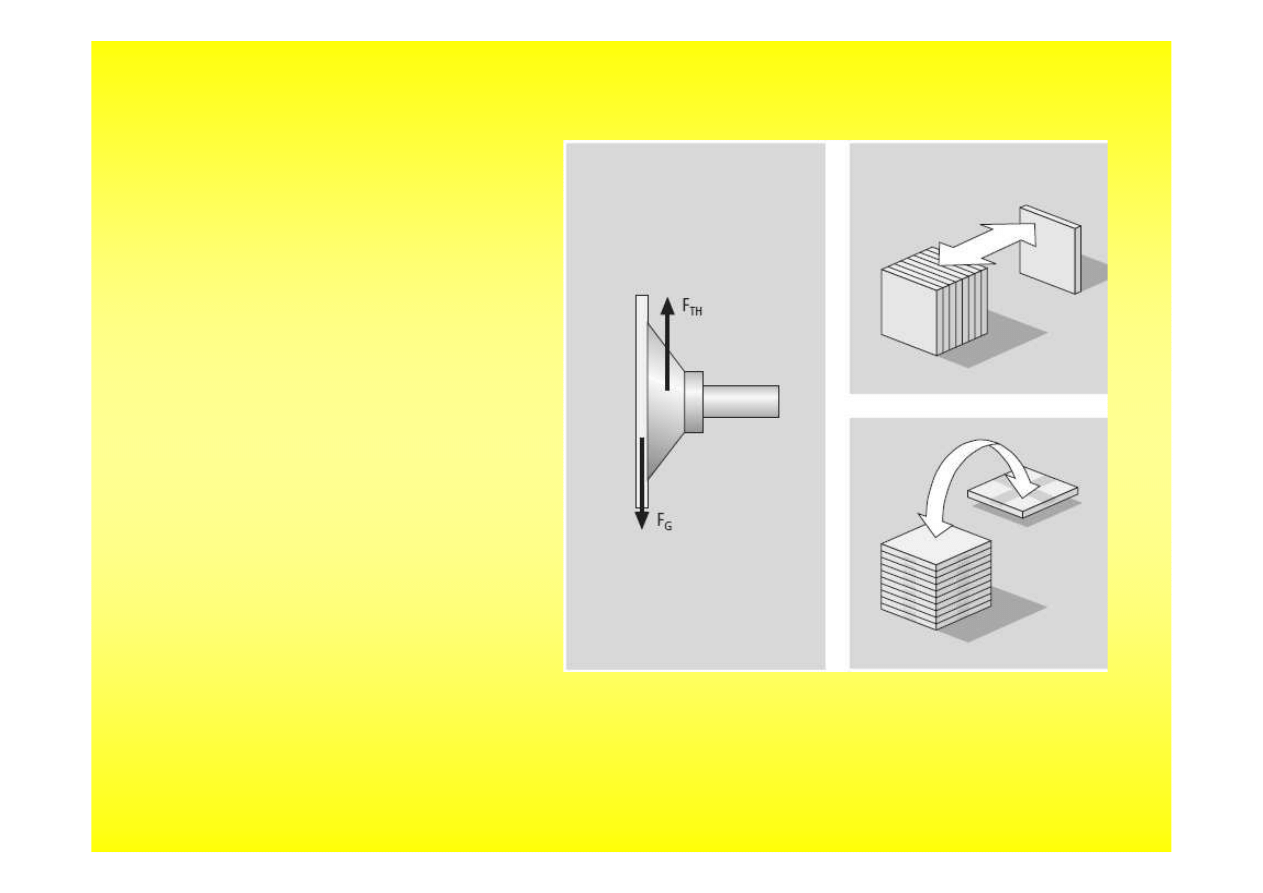
Przykład III – Przyssanie pionowo, siła pionowo
F
TH
= (m/
µ
) x (g + a) x S
F
TH
= (61 /0,5) x (9,81 + 5) x 2
F
TH
= 3633 N
Dla podanego przykładu oblicze
ń
nie trzeba uwzgl
ę
dnia
ć
III przykładu gdy
ż
blachy b
ę
d
ą
przemieszczane tylko pozycji pionowej. Porównanie wyników z przykładów I i II pokazuje
dla zadania warto
ść
maksymaln
ą
F
TH
= 1822 N w przykładzie II. Warto
ść
ta b
ę
dzie u
ż
ywana
do dalszego doboru przyssawek.
Krok 3. Wybór przyssawek
Wybór przyssawek nast
ę
puje w wi
ę
kszo
ś
ci przypadków zgodnie z nast
ę
puj
ą
cym
kryterium:
Zastosowanie: Istotne dla wyboru przyssawek s
ą
warunki ich zastosowania – praca
wielozmianowa, oczekiwania klienta, agresywna temperatura pracy, itp.
Materiał: Przyssawki wykonywane s
ą
z ró
ż
nych materiałów tak, aby sprosta
ć
wymaganiom stawianym przez gładkie, porowate i zaolejone powierzchnie lub delikatne
elementy.
Powierzchnia: Zale
ż
nie od struktury powierzchni zaleca si
ę
równie
ż
odpowiednie kształty
przyssawek. Do wyboru mamy przyssawki płaski lub mieszkowe, z ró
ż
nymi wargami lub
kraw
ę
dziami uszczelniaj
ą
cymi, oraz w ró
ż
nych kształtach i konstrukcji
Powrót do zadania: Obsługa dotyczyła blach stalowych (2500 x 1500 mm), dla takich
formatów blach stosuje si
ę
na ogół 6 lub 8 przyssawek. Istotnym kryterium dla liczby
przyssawek jest w tym przypadku wyginanie si
ę
arkusza podczas transportu. Maj
ą
c
wyliczon
ą
wcze
ś
niej maksymalna sił
ę
trzymania
F
TH
= 1822 N jak
i liczb
ę
przyssawek n = 6,
Wylicza si
ę
sił
ę
przyssania FS.
F
S
= FTH/n
F
S
= 1822/6
F
S
= 304 N
W powy
ż
szym przykładzie zastosowane b
ę
d
ą
przyssawki typu PFYN 95 NBR z katalogu
firmy SCHMALZ
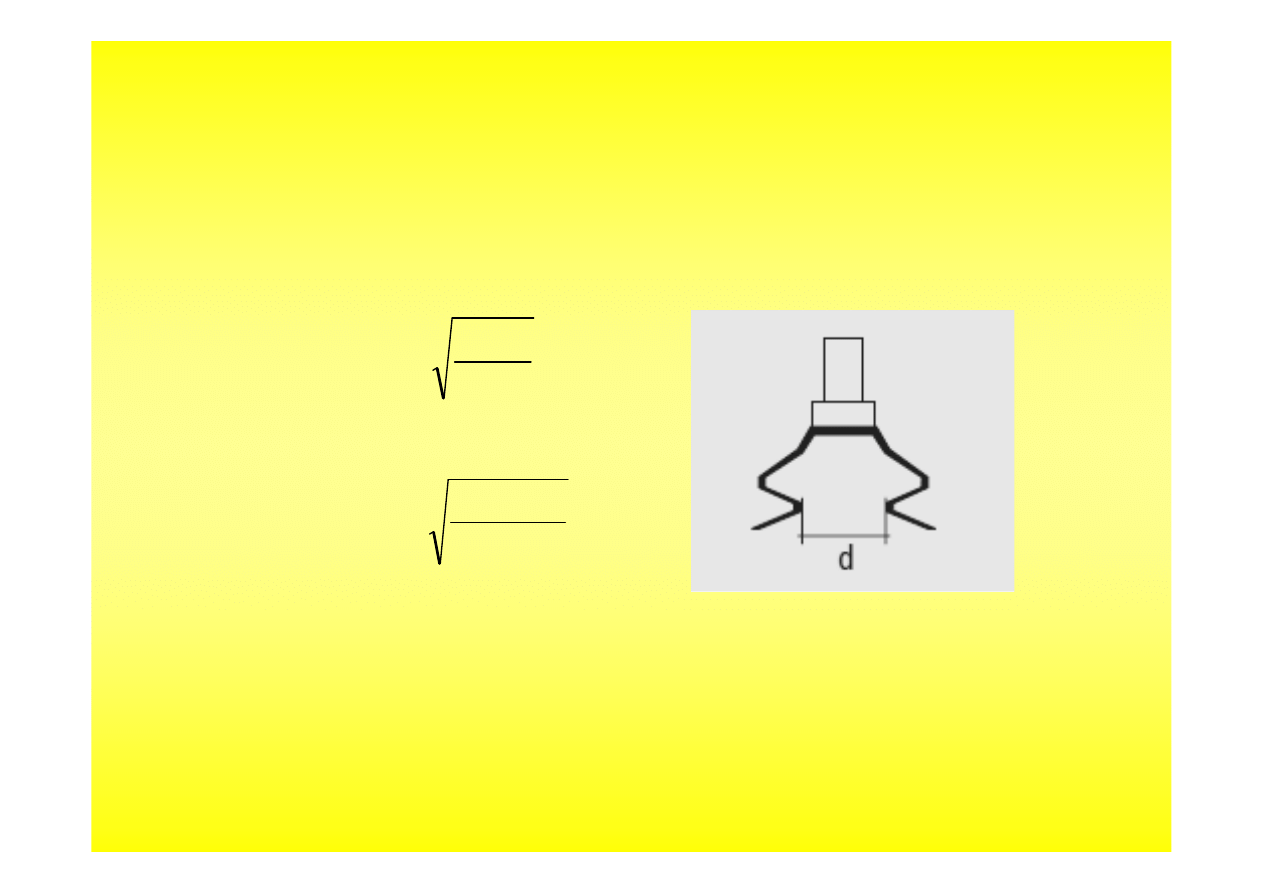
Obliczenia
ś
rednicy przyssawki
Do absolutnej siły trzymania wa
ż
na jest równie
ż ś
rednica przyssawki zale
ż
na
od wła
ś
ciwo
ś
ci powierzchni danego elementu. Odpowiedni
ą ś
rednice mo
ż
na policzy
ć
przy pomocy poni
ż
szych wzorów.
Przyssanie poziome:
n
Pu
22
.
1
⋅
⋅
=
S
m
d
Przyssanie pionowe
:
µ
⋅
⋅
⋅
=
n
Pu
S
m
d
22
.
1
d -
ś
rednica przyssawki w cm (przy podwójnej wardze –
ś
rednica wewn
ę
trzna, przy
przyssawce mieszkowej –
ś
rednica wewn
ę
trzna wargi uszczelniaj
ą
cej)
m - masa elementu w kg
Pu - podci
ś
nienie w barach
n - liczba przyssawek
S - współczynnik bezpiecze
ń
stwa
Μ
- współczynnik tarcia
Przykład:
Płyta z tworzywa sztucznego:
m = 50kg
Podci
ś
nienie:
Pu = - 0,4 bar
Liczba przyssawek:
n = 4
Współczynnik tarcia:
µ
= 0.5
Współczynnik bezpiecze
ń
stwa: S = 2
5
.
0
4
4
.
0
2
50
22
.
1
⋅
⋅
⋅
=
d
d = 125 mm
W tym przypadku sensowne jest zastosowanie przyssawki firmy Schmalz, typu
PFYN 150 o
ś
rednicy nominalnej 150 mm
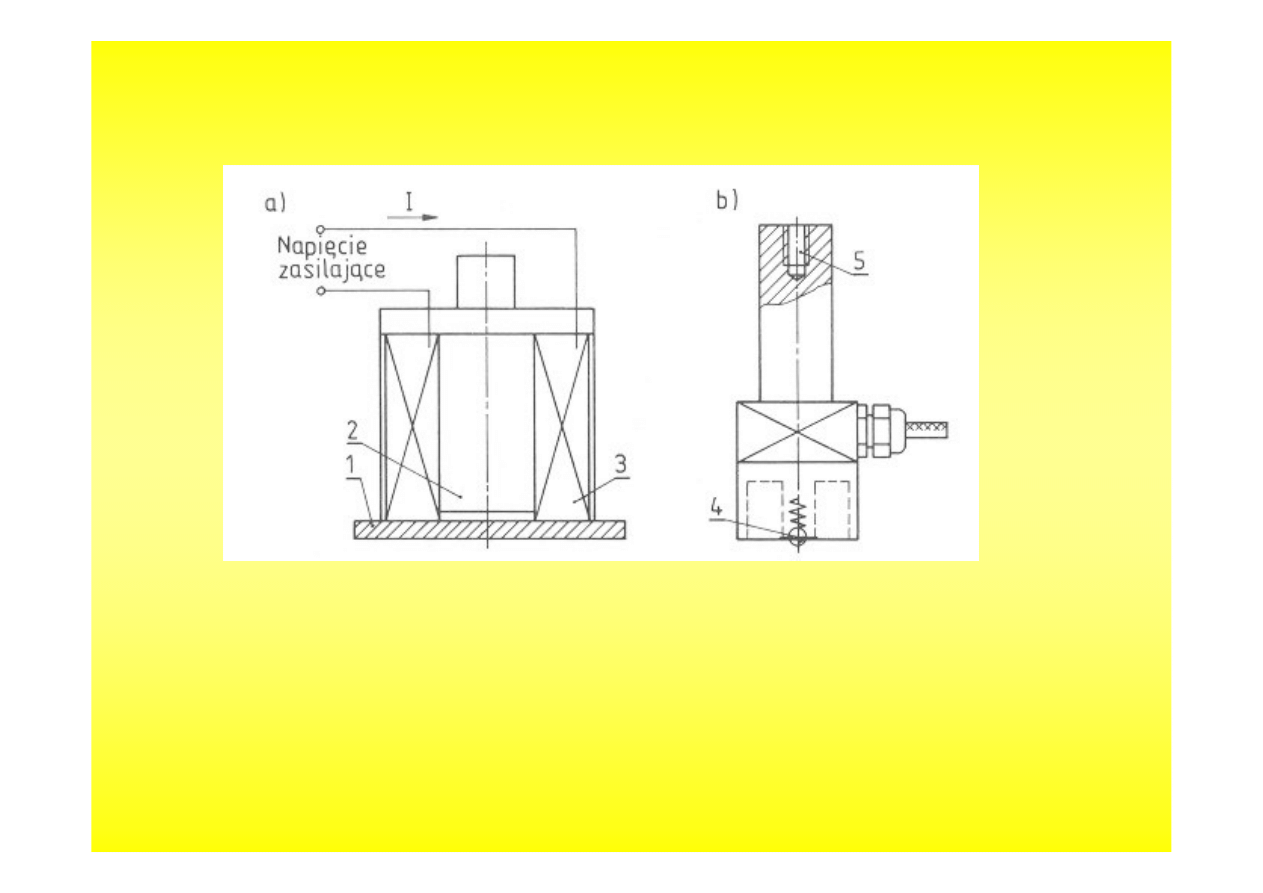
Rys. 8.6. Budowa chwytaka elektromagnetycznego: 1-obiekt (np. arkusz blachy), 2-
rdze
ń
elektromagnesu, 3-uzwojenie elektromagnesu, 4-odrzutnik kulkowo-
spr
ęż
ynowy, 5-miejsce mocowania chwytaka
Chwytaki elektromagnetyczne i magnetyczne
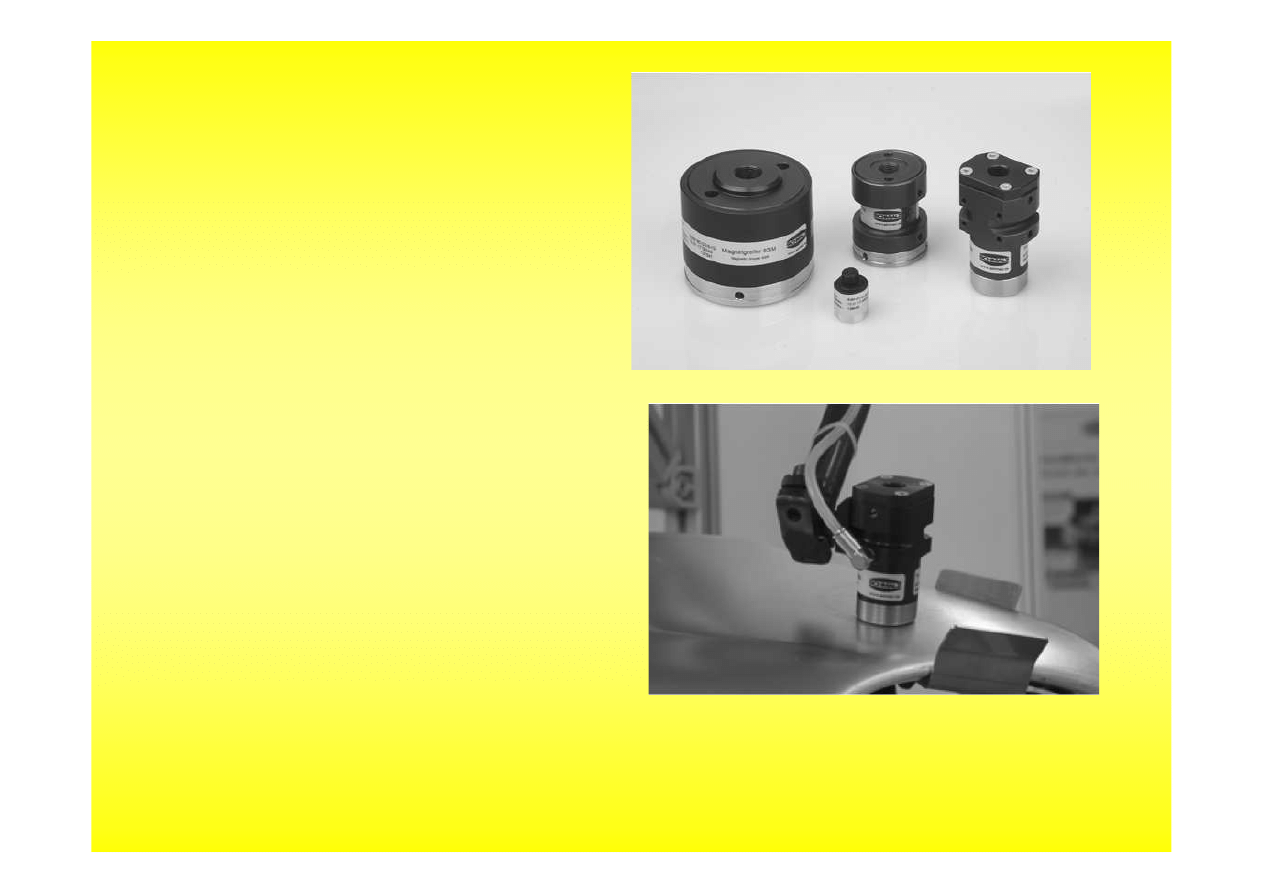
Rys. Chwytaki magnetyczne
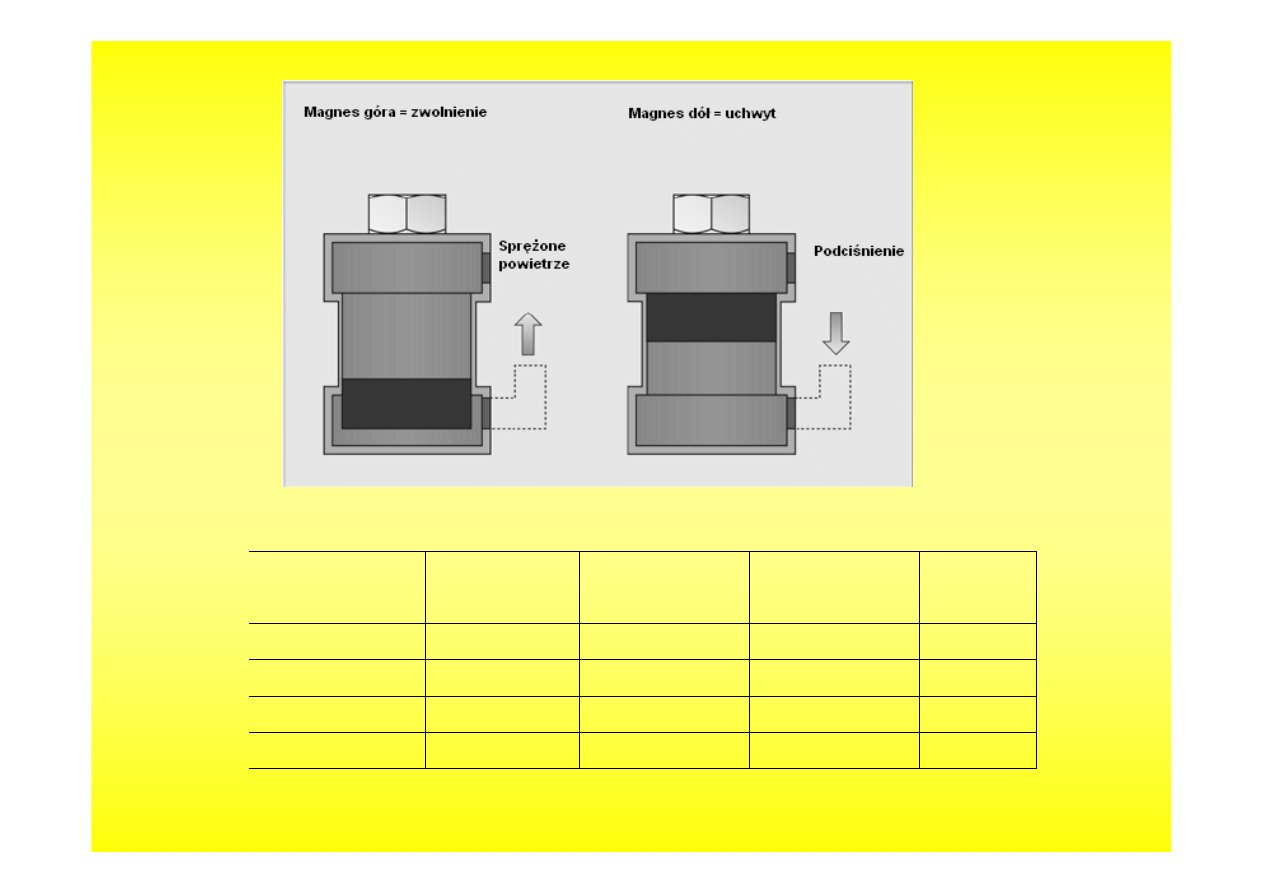
Chwytaki magnetyczne
Pole magnetyczne uzyskiwane jest poprzez
magnes trwały. Uwalnianie przy pomocy
ci
ś
nienia, ew. podci
ś
nienia.
Zastosowanie:
• Obsługa
perforowanych
blach,
powycinanych laserem elementów i arkuszy z
otworami i wyci
ę
ciami
• Obsługa elementów ferromagnetycznych,
niemo
ż
liwych do uchwycenia przyssawkami
Zalety:
• Pewne
chwytanie
za
pomoc
ą
pola
magnetycznego
• Pole magnetyczne generowane jest przy
pomocy magnesu stałego, wi
ę
c nie wymaga
zasilania
• Sterowane przy pomocy impulsów nad lub
podci
ś
nienia
Dane techniczne chwytaków magnetycznych
Typ
Siła trzymania
[N]
Ci
ś
nienie pracy
[bar]
Temperatura
pracy [
o
C]
Masa [g]
SGM 20 G1/8-A8
8
1.5…6
5…50
15
SGM 47 G1/4-IG
70
1.5…6
5…50
240
SGM 47 G3/8-IG
70
1.5…6
5…50
240
SGM 80 G3/8-IG
300
1.5…6
5…50
820
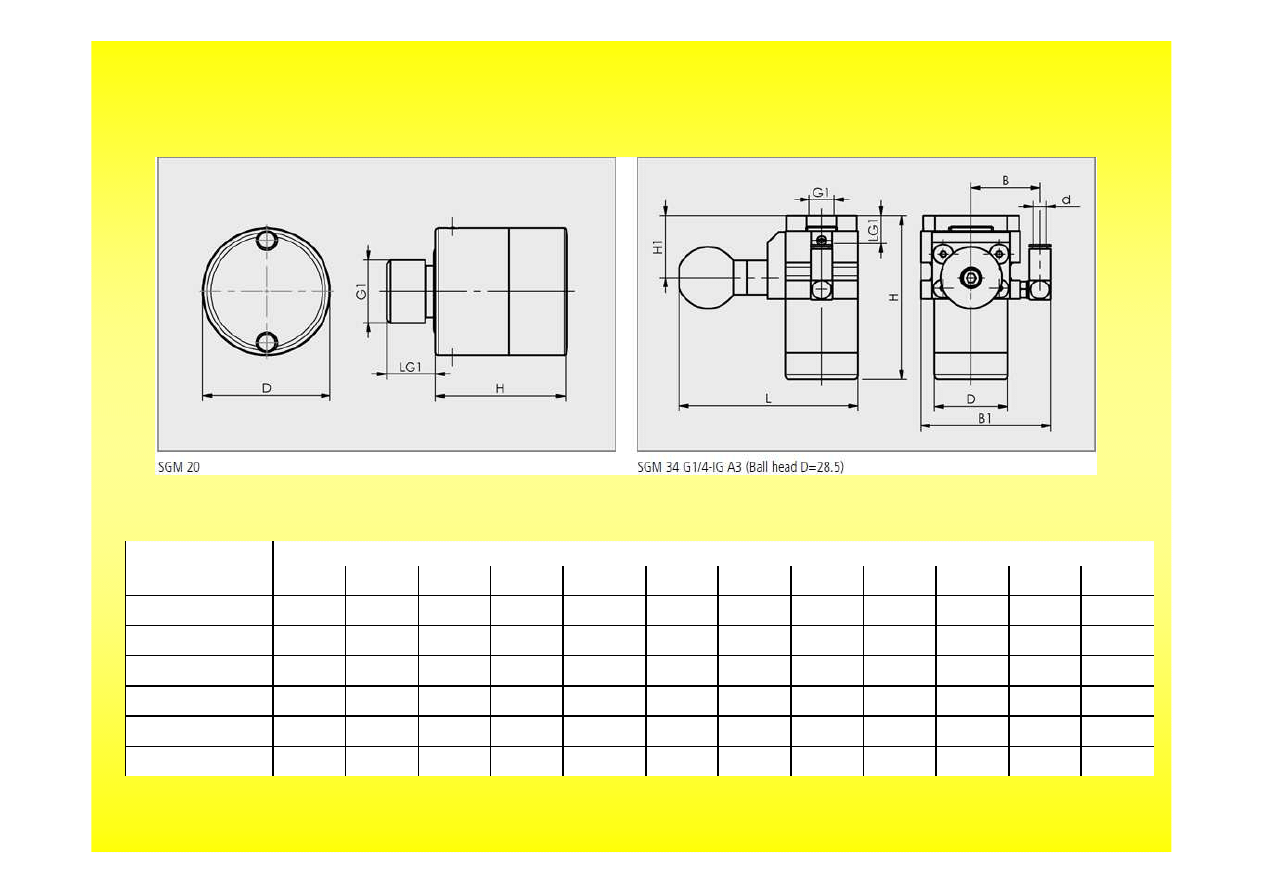
Dane projektowe chwytaków magnetycznych
Wymiary w mm
Ty p
B
B1
d
D
G1
G2
H
H1
L
LG1
X1
Y1
SGM 20 G1/8-AG
-
-
-
19
G1/8-M
-
20,5
-
-
7,5
-
-
SGM 34 G1/4-IG
32
60,5
6
34
G1/4-F
M4-F
76,5
-
-
13,0
26,0
16,0
SGM 34 G1/4-IG A3
32
60,5
6
34
G1/4-F
-
76,5
29,0
83,3
10,0
-
-
SGM 47 G1/4-IG
32
60,5
6
47
G1/4-F
-
58,0
-
-
10,0
-
-
SGM 47 G3/8-IG
32
60,5
6
47
G3/8-F
-
71,5
-
-
8,0
-
-
SGM 80 G3/8-IG
52
98,5
6
80
G3/8-F
-
66,5
-
-
13,0
-
-
Narz
ę
dzia
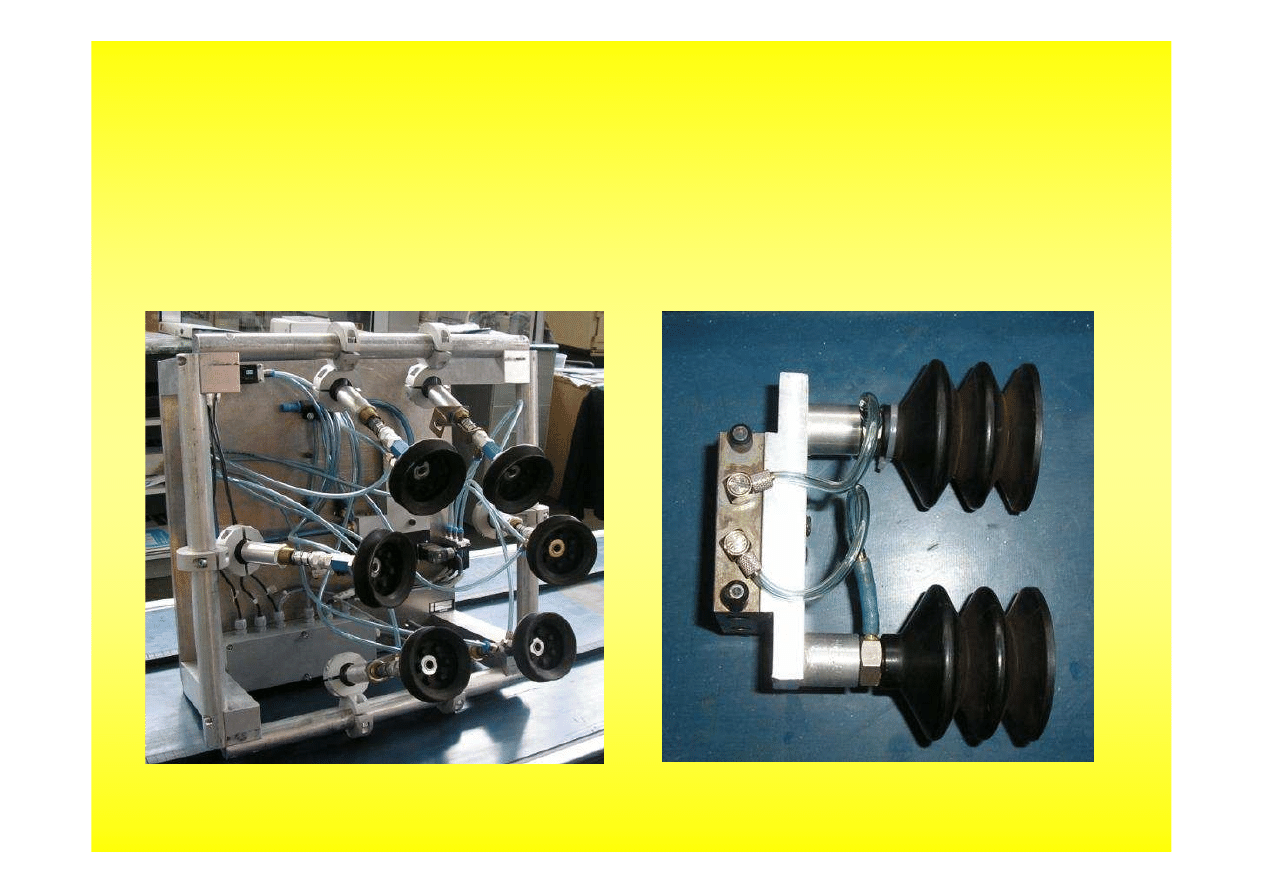
Chwytak przyssawkowy du
ż
y
Wykorzystywany do wydobywania
kineskopu z telewizora. Ze wzgl
ę
du na
du
żą
mas
ę
operował nim tylko robot
KUKA.
Chwytak przyssawkowy mały
Ma dwie gumowe przyssawki.
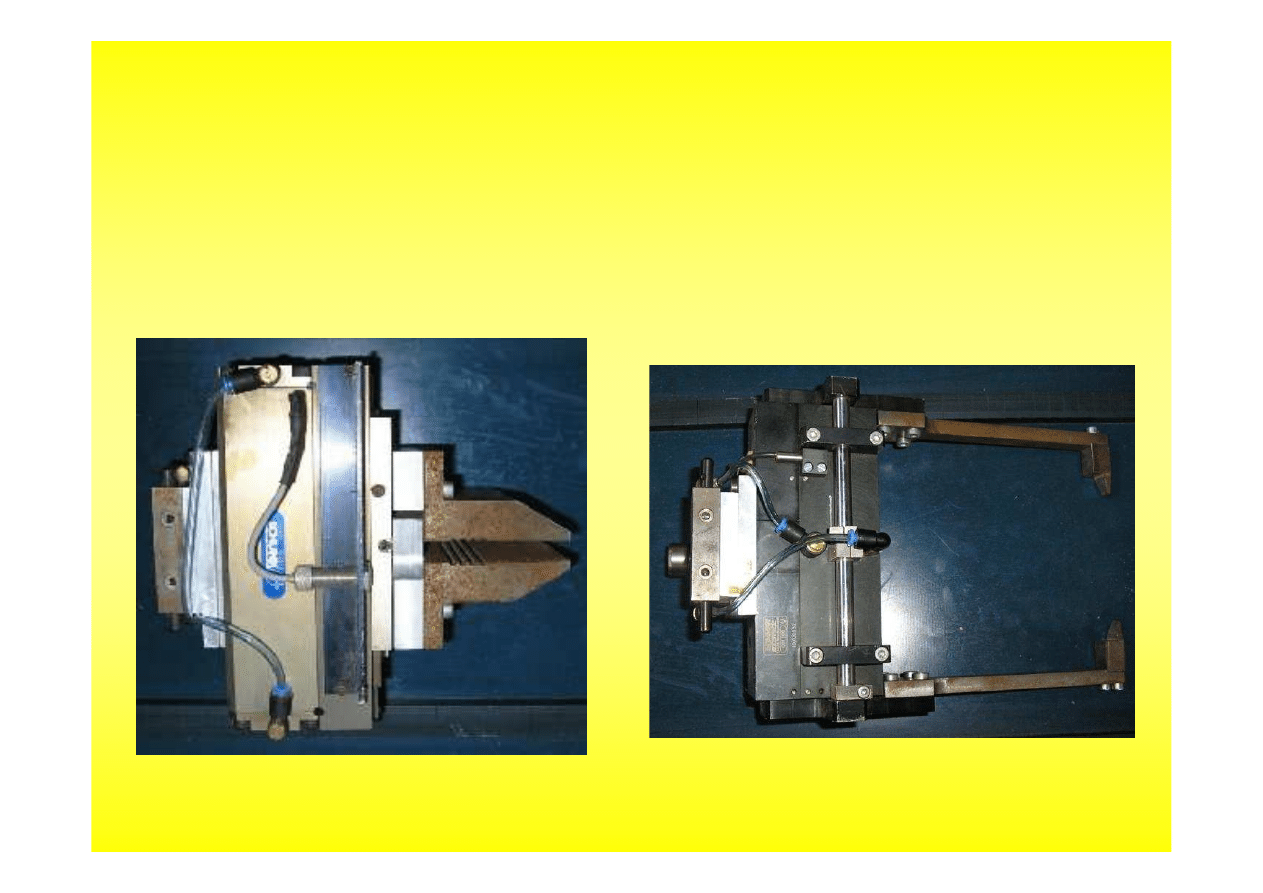
Chwytak mechaniczny du
ż
y
Nap
ę
d chwytaka pneumatyczny.
Znajduje si
ę
kilka zaworów
odpowiednio reguluj
ą
cych ci
ś
nienie,
aby zapobiec zgniataniu
przenoszonego przedmiotu.
Chwytak mechaniczny
Nap
ę
d chwytaka pneumatyczny. Słu
ż
y do
wyjmowania przedmiotów małych,
umieszczonych w trudno dost
ę
pnych
miejscach.
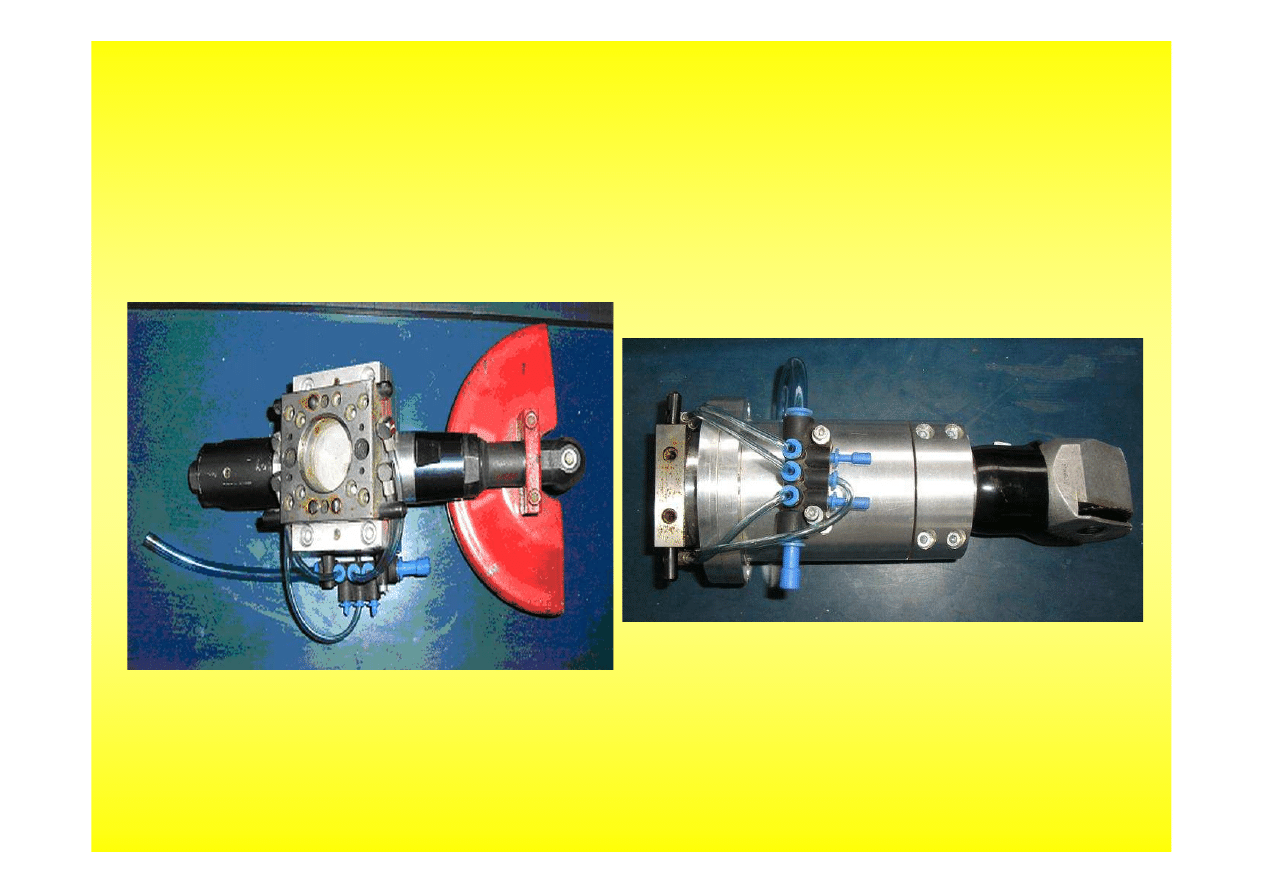
Piła du
ż
a
Nap
ę
d pneumatyczny. Przy ci
ś
nieniu
6 barów i przepływie powietrza 10 l/s
osi
ą
ga moc 400W i maksymaln
ą
pr
ę
dko
ść
obrotow
ą
1100 obr/min.
Piła mała
Nap
ę
d pneumatyczny. Przy ci
ś
nieniu 6
barów i przepływie 7,5 l/s osi
ą
ga moc 350
W. Maksymalna liczba obrotów wynosi
3000 obr/min
Klucz do nakr
ę
tek
Ś
rubokr
ę
t krzy
ż
akowy oraz wkr
ę
tak
Do odkr
ę
cania nakr
ę
tek i
ś
rub przewidziano
dwa narz
ę
dzia. Przy ci
ś
nieniu 6 barów
maksymalna pr
ę
dko
ść
obrotowa wynosi
500 obr/min. W celu unikni
ę
cia zerwania
gwintu, moc została znacznie ograniczona.
Poniewa
ż
pozycja
ś
rub mo
ż
e by
ć
ró
ż
na
dodatkowym wyposa
ż
eniem ka
ż
dego z tych
narz
ę
dzi jest tuleja centruj
ą
ca.
No
ż
yce
U
ż
ywane do przecinania przewodów
elektrycznych
.
Dłuto
U
ż
ywane do usuwania nie rozł
ą
cznych
poł
ą
cze
ń
. Przy ci
ś
nieniu 6 barów i
przepływie powietrza 2,5 l/s ostrze dłuta
wykonuje 900 uderze
ń
na minut
ę
przy
skoku roboczym wynosz
ą
cym 15 mm.
Frezarka
Słu
ż
y do usuwania poł
ą
cze
ń
nitowych, stałych
trzpieni, nierozł
ą
cznych poł
ą
cze
ń
ś
rubowych
itp. Maksymalna pr
ę
dko
ść
obrotowa 20.000
obr/min. Przy ci
ś
nieniu 6 barów i przepływie
powietrza 9,7 l/s frezarka ma moc 300W
Sprz
ę
g narz
ę
dzia
Magazyny narz
ę
dzi
Stół obrotowy
Wyszukiwarka
Podobne podstrony:
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
Programowanie robotów przemysłowych FANUC
9 Efektory robotów przemysłowych
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
NAPĘDY ROBOTÓW PRZEMYSŁOWYCH
CHRAPEK,podstawy robotyki, Sterowanie robotów przemys owych
Analiza budowy i działania robotów przemysłowych na przykładzie robota PRO 30 ( Politechnika Krakows
90 313901 kontroler robotow przemyslowych
Charakterystyki robotów przemysłowych i ich badanie
(STEROWANIE ROBOTÓW PRZEMYSLOWYCH)
10 Wprowadzenie do programowania robotów przemysłowych
Budowa robotów przemysłowych
Programowanie robotów przemysłowych FANUC
więcej podobnych podstron