Więcej na www.chomikuj.pl/MarWag987
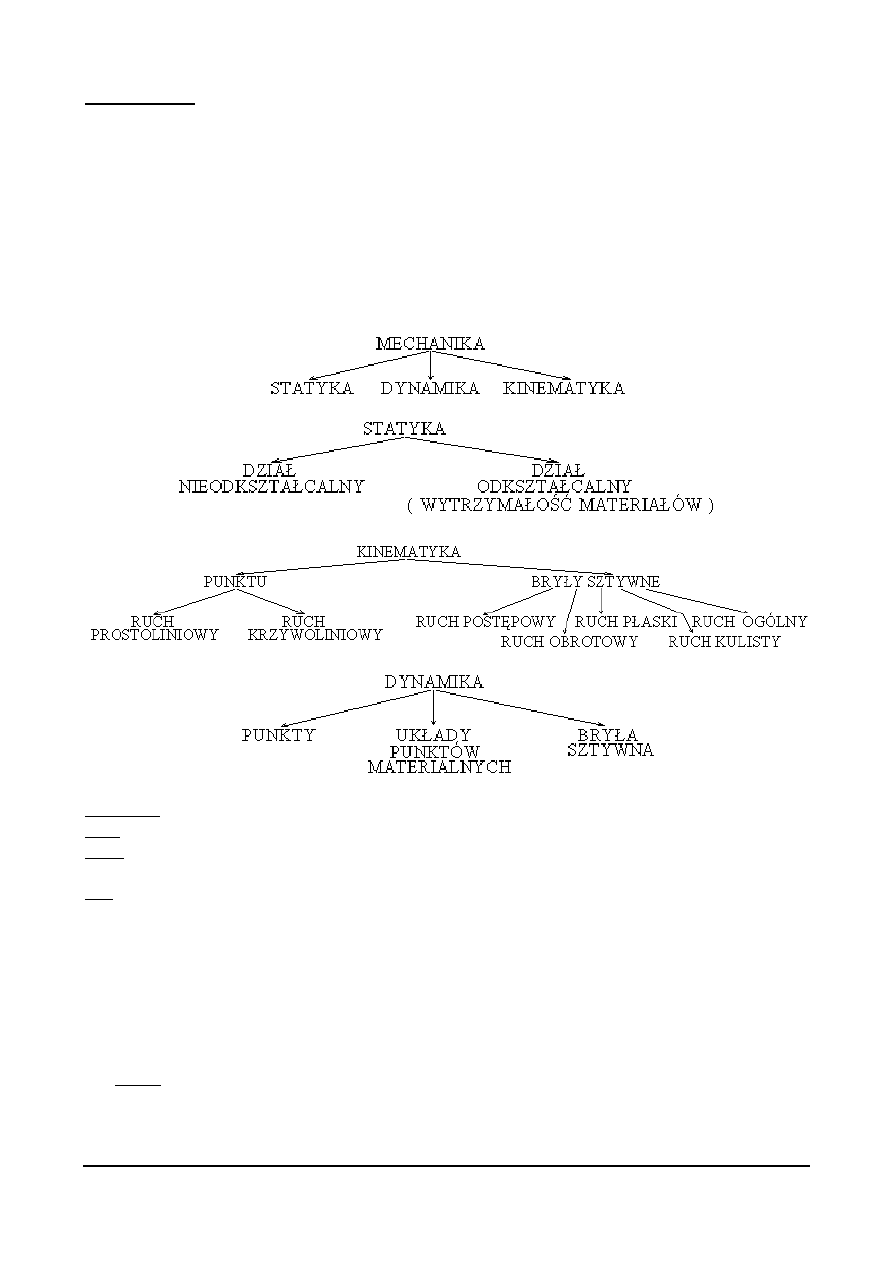
MECHANIKA
Mechanika – dział fizyki mówiący o ruchu ciał materialnych pod wpływem działających
sił.
Podstawowe pojęcia mechaniki to:
1.
Punkt materialny.
2.
Układ punktów materialnych.
3.
Bryła sztywna.
Ad1. Punktem materialnym – nazywamy punkt geometryczny, który posiada pewną skończoną
masę.
Ad2. Układem punktów materialnych – nazywamy zbiór punktów materialnych.
Ad3. Bryłą sztywną – nazywamy układ punktów, w którym wzajemne odległości nie ulegają
zmianie.
Pojęcia pierwotne w mechanice:
Przestrzeń – jest to wielkość związana z określeniem położenia punktu lub ciała.
Czas – II wielkość pierwotna
Masa – miara służąca do scharakteryzowania i do porównania ciał materialnych w oparciu o
podstawowe eksperymenty
Siła – jest miarą oddziaływania jednego ciała na drugie po przez kontakt bezpośredni obu
ciał, bądź na odległość ( pola magnetyczne ).
Mechanika Newtonowska – wielkości niezależne
Mechanika realistyczna – wielkości zależne przy dużych prędkościach
Mechanika klasyczna – zajmuje się badaniem warunków spoczynku i ruchem punktów
materialnych i brył sztywnych w funkcji czterech pojęć podstawowych.
Podział wielkości fizycznych:
- skalary,
- wektory.
Skalar – to wielkość, którą można określić za pomocą jednej liczby rzeczywistej ( np.
czas, masa, energia, praca, moc, gęstość ).
Więcej na www.chomikuj.pl/MarWag987
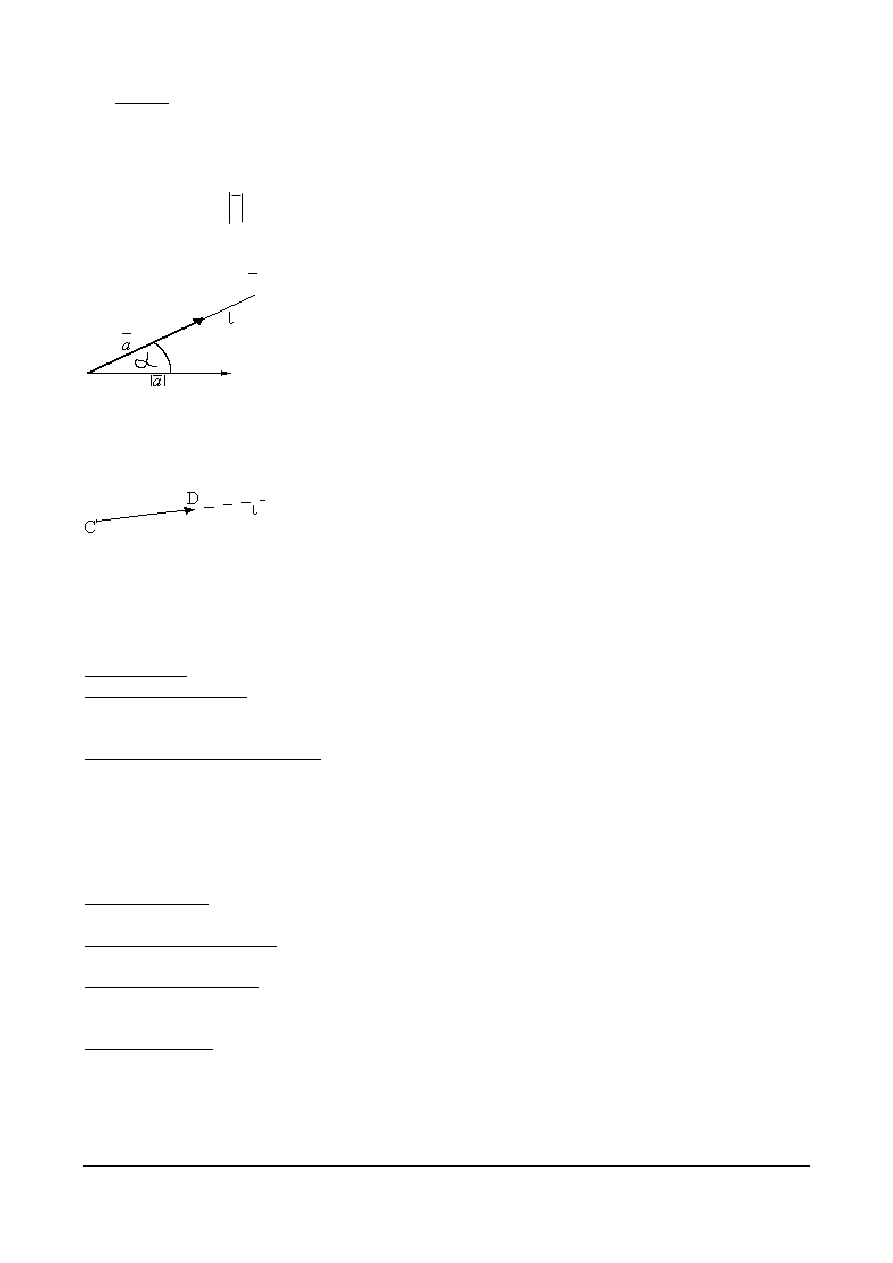
Wektor – jest to wielkość określona liczbą, posiadająca kierunek i zwrot w przestrzeni
( np. siła, prędkość, przyspieszenie ). Obrazem wektora jest odcinek skierowany.
Określając wektor należy podać:
- Wartość ( moduł wektora ) – stanowi liczbę jednostek długości narysowanej w przyjętej
skali – oznaczenie:
a
- Kierunek ( wyznacza prosta „l” )
- Zwrot ( zaznaczony grotem )
Oznaczenie wektora:
a
Pojęcie siły można określić jako wzajemne oddziaływanie jednego ciała na drugie. Jest
wielkością wektorową gdyż dla jednoznacznego opisania należy określić:
1.
Wartość liczbową – długość odcinka CD.
2.
Kierunek – który wyznacza prosta „l”.
3.
Zwrot – oznaczony grotem.
Punkt D ( punkt zetknięcia wektora siły z ciałem ) nazywamy punktem przyłożenia siły.
Układ sił – jest to zbiór sił przyłożonych w jednym lub kilku punktach ciała.
Podział sił ( na sposób przyłożenia ):
-
siła skupiona,
-
siła powierzchniowa,
-
siła objętościowa lub masowa.
Siła skupiona – jest to sił, która działa na ciało materialne w pewnym określonym punkcie.
Siły powierzchniowe – są to siły, których działanie jest rozłożone na części lub na całej
powierzchni ( np. siła nacisku jednego ciała położonego na drugie, siła wiatru napierającego
na ścianę budynku ).
Siły objętościowe lub masowe – są to siły, których działanie jest rozłożone na całą objętość
ciała.
Podział sił:
-
siły wewnętrzne,
-
siły zewnętrzne:
- siły czynne,
- siły bierne.
Siły zewnętrzne – są to siły oddziaływania pomiędzy poszczególnymi ciałami lub bryłami
sztywnymi, źródłem działania tych sił są inne ciała.
Siły zewnętrzne czynne – są to takie siły, które próbują zmienić stan spoczynkowy lub
ruchowy ciała.
Siły zewnętrzne bierne – występują w miejscach ograniczających swobodę ruchu ciała w tzw.
podporach, występują one podczas działania sił zewnętrznych czynnych przeciwdziałając
ruchowi.
Siły wewnętrzne – siły oddziaływania pomiędzy cząsteczkami materii tego samego ciała po
dokonaniu „myślowego” przecięcia przez ciało.
Więcej na www.chomikuj.pl/MarWag987
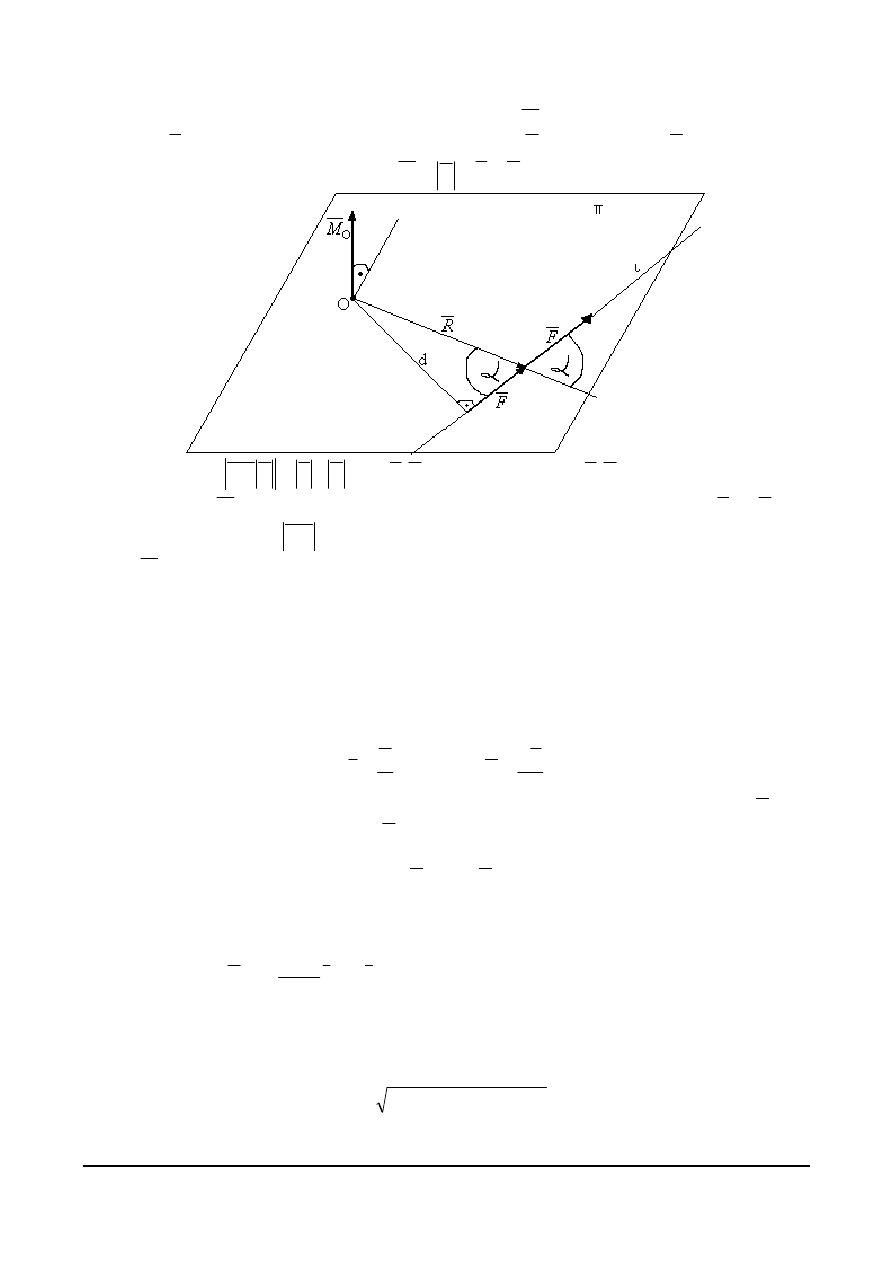
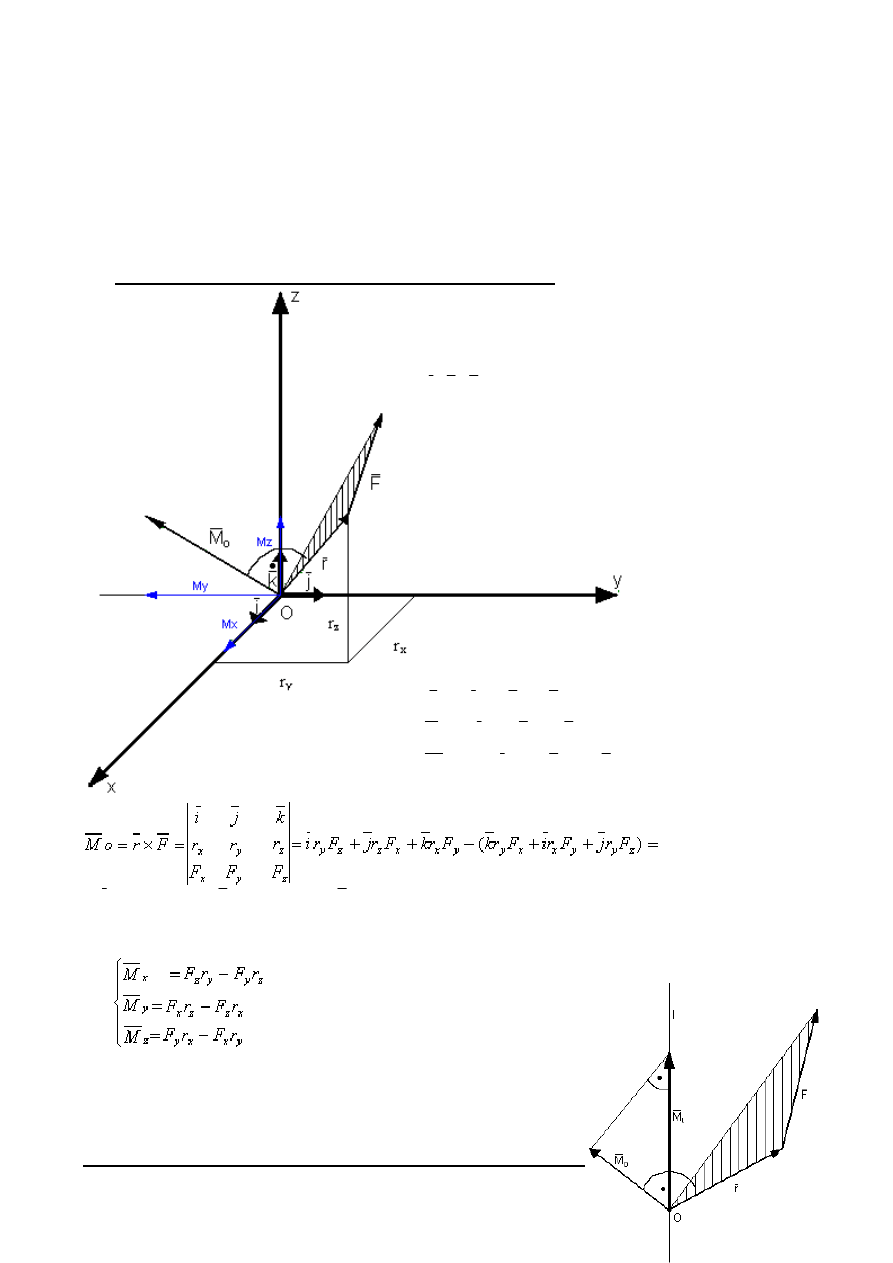
DEF. MOMENTU SIŁY WZGLĘDEM PUNKTU: Momentem siły względem punktu (
nazwanego punktem „O” ) nazywamy wektor momentu M
O
równy iloczynowi wektorowemu
promienia R wyprowadzonego z punktu O do wektora F i wektora siły F .
M
O
F = R
×
F
( )
F
R
F
R
F
M
O
,
sin
∠
•
=
( )
α
∠
=
∠
F
R,
Jego kierunek ( M
O
) jest prostopadły do płaszczyzny utworzonej przez wektory R i F .
Jego wartość jest równa
O
M
=Fd.
Zwrot M
O
zgodny z regułom śruby prawoskrętnej.
PRAWA NEWTONA
I Prawo Newtona. Jeżeli na ciało nie działają żadne siły lub działające siły równoważą się,
to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym po lini prostej.
II Prawo Newtona. Jeżeli na ciało działa siła ( wypadkowa wszystkich sil działających na
punkt materialny jest różna od zera ), to porusza się ono względem inercjalnego układu
odniesienia ruchem zmiennym z przyspieszeniem wprost proporcjonalnym do siły, a
odwrotnie proporcjonalnym do masy ciała. Kierunek i zwrot wektora przyspieszenia są zgodne
z kierunkiem i zwrotem wektora siły.
m
F
a
=
dt
p
d
F
=
III Prawo Newtona. Jeżeli dwa ciała A i B działają wzajemnie na siebie, to siła F
AB
, z
jaką ciało A działa na ciało B i siła F
BA
, z jaką ciało B działa na ciało A, są równe co do
wartości, mają ten sam kierunek, ale przeciwne zwroty.
F
AB
= - F
BA
Prawo Grawitacji Newtona. Każde dwa punkty materialne przyciągają się wzajemnie siłą
wprost proporcjonalną do iloczynu ich mas i odwrotnie proporcjonalną do kwadratu odległości
między nimi.
F
12
=g
0
2
2
1
r
r
m
m
0
r
- wektor jednostkowy, g – stała grawitacji
ZASADY STATYKI
Zasada pierwsza ( zasada równoległoboku ) – działanie dwóch sił P1 i P2 można
zastąpić działaniem jednej siły R, działającej na ten sam punkt i będącej przekątną
równoległoboku ABCD zbudowanego na wektorach sił P1 i P2.
α
cos
2
2
1
2
2
2
1
P
P
P
P
R
+
+
=
Gdy siły P1 i P2 działają wzdłuż jednej prostej i są zgodnie skierowane R=P1+P2.
Więcej na www.chomikuj.pl/MarWag987
Natomiast, gdy siły są przeciwnie skierowane i P2>P1; R=P2-P1.
Zasada druga – jeżeli do ciała przyłożone są dwie siły, to równoważą się one tylko wtedy
gdy mają te samą linię działania, te same wartości liczbowe i przeciwne zwroty. Aby siły te
równoważyły się, muszą być spełnione zależności:
2
1
P
P
=
i
2
1
P
P
=
. Na podstawie tej
zasady można, wyprowadzić pojęcie siły zerowej, czyli siły, której wartość jest równa zeru. Z
zasady tej wynika także pojęcie siły przeciwnej do siły P1, której bezwzględna wartość oraz
linie działania są takie same, ale zwrot jest przeciwny. Siłę przeciwną oznacza się znakiem
minus ( -P2 ).
Zasada trzecia – skute działania układu sił przyłożonego do ciała nie zmienia się, jeśli do
tego układu dodamy lub odejmiemy dowolny układ równoważących się sił, czyli tzw. układ
zerowy. Z zasady tej wynika następujący wniosek: każdą siłę działającą na ciało sztywne
można przesunąć dowolnie wzdłuż jaj lini działania.
Zasada czwarta ( zasada zesztywnienia ) – jeżeli ciało odkształcalne znajduje się w
równowadze pod działaniem pewnego układu sił, to również pozostanie w równowadze ciało
odkształcalne sztywne ( nieodkształcalne ) identyczne z poprzednim, pod działaniem tego
samego układu sił. Wynika stąd wniosek, że warunek konieczny i wystarczający do
równowagi ciała sztywnego jest tylko warunkiem koniecznym, ale nie wystarczającym do
równowagi ciała odkształcalnego.
Zasada piąta ( zasada działania i przeciwdziałania ) – każdemu działaniu towarzyszy
równe co do wartości, o przeciwnym zwrocie i leżące na tej samej prostej przeciwdziałanie.
Zasada szósta ( zasada oswobodzenia od więzów ) – każde ciało nie swobodne można
myślowo oswobodzić z więzów, zastępując ich działanie reakcjom, a następnie rozważać jako
ciało swobodne znajdujące się pod działaniem sił czynnych i biernych ( reakcji więzów ).
Własności iloczynu skalarnego:
-
przemienność:
v
w
w
v
o
o
=
-
rozdzielność względem dodawania:
w
u
v
u
w
v
u
o
o
o
+
=
+
)
(
-
łączność mieszana:
)
(
)
(
w
v
a
w
v
a
o
o
•
=
•
-
warunek prostopadłości wektorów:
0
=
w
v o
( )
w
v
w
v
w
v
,
cos
∠
=
o
Własności iloczynu wektorowego:
-
antyprzemienność:
v
w
w
v
×
−
=
×
-
rozdzielność względem dodawania:
( )
w
u
v
u
w
v
u
×
+
×
=
+
×
-
łączność mieszana:
( )
( )
w
v
a
w
v
a
×
•
=
×
•
-
prostopadłość
iloczynu
wektorowego
do
pozostałych
czynników:
w
w
v
v
w
w
o
o
)
(
)
(
×
=
×
=0
)
,
(
sin
w
v
w
v
w
v
∠
=
×
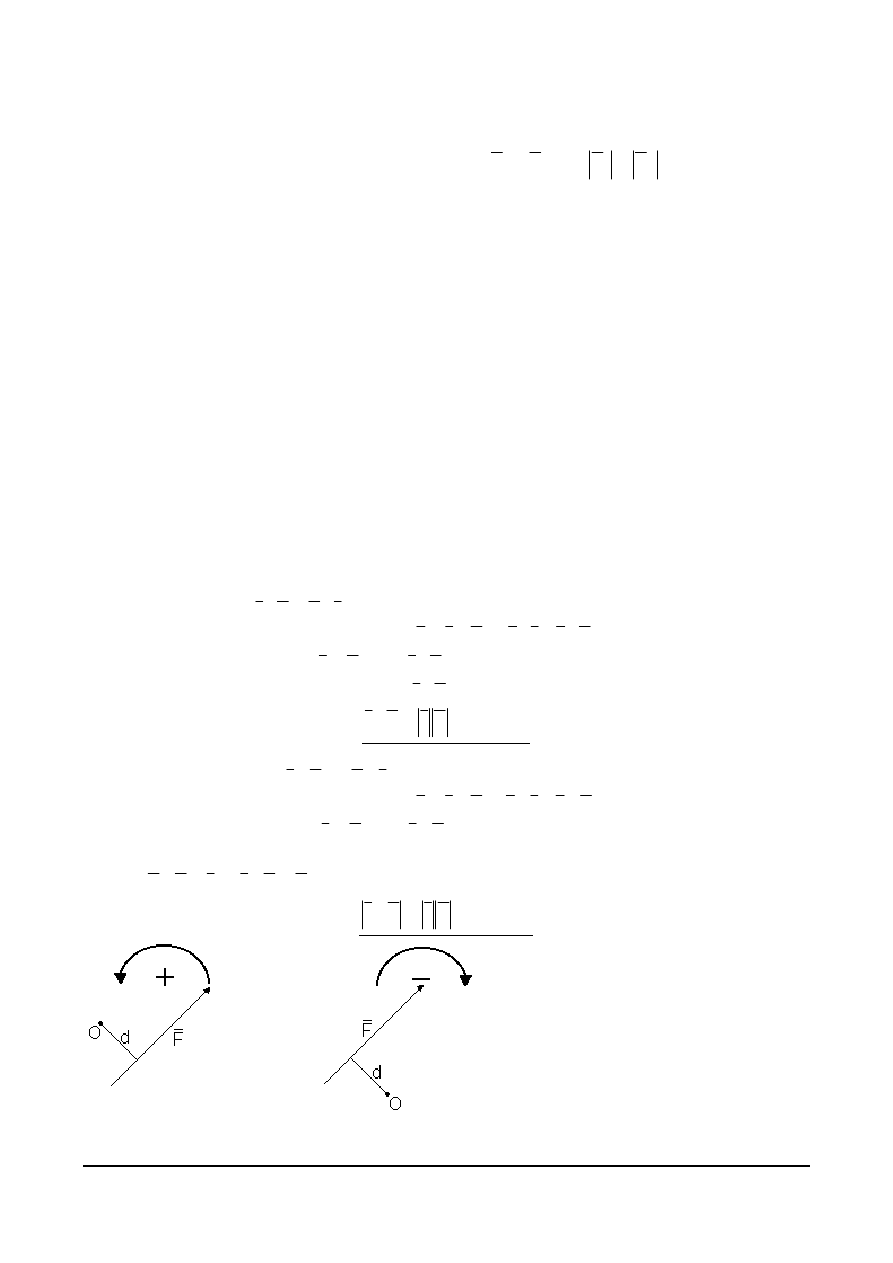
Zwrot zgodny z regułą Zwrot przeciwny do reguły
Więcej na www.chomikuj.pl/MarWag987
śruby prawo skrętnej śruby prawo skrętnej
znak „+”
znak „ – ”
Moment siły względem punktu nie zmieni się jeżeli siłę przeniesiemy wzdłuż jej lini
działania.
Jeżeli prosta działania siły przechodzi przez punkt O to moment siły równa się zero.
Moment siły w kartezjańskim układzie współrzędnych.
M
x
, M
y
, M
z
– moment siły względem danej osi
i
,
j
,
k
- wektory jednostkowe
k
r
j
r
i
r
r
z
y
x
+
+
=
k
F
j
F
i
F
F
z
y
x
+
+
=
k
M
j
M
i
M
M
z
y
x
O
+
+
=
)
(
)
(
)
(
y
x
x
y
x
z
z
x
z
y
y
z
r
F
r
F
k
r
F
r
F
j
r
F
r
F
i
−
+
−
+
−
=
Po rozwinięciu wyznacznika współrzędne, które nazywamy momentami siły względem
odpowiedniej osi nazywamy:
Moment siły względem osi jest równy zero, gdy siła jest
równoległa do osi lub gdy linia działania siły przecina oś.
Więcej na www.chomikuj.pl/MarWag987
Moment siły F względem punktu o jest sumą, momentów sił względem osi: x, y, z
przecinających się w tym punkcie.
Momentem siły F względem dowolnej prostej l nazywamy rzut, wektora momentu
obliczanego względem dowolnego punktu leżącego na prostej l, na prostą l.
( rys. obok )
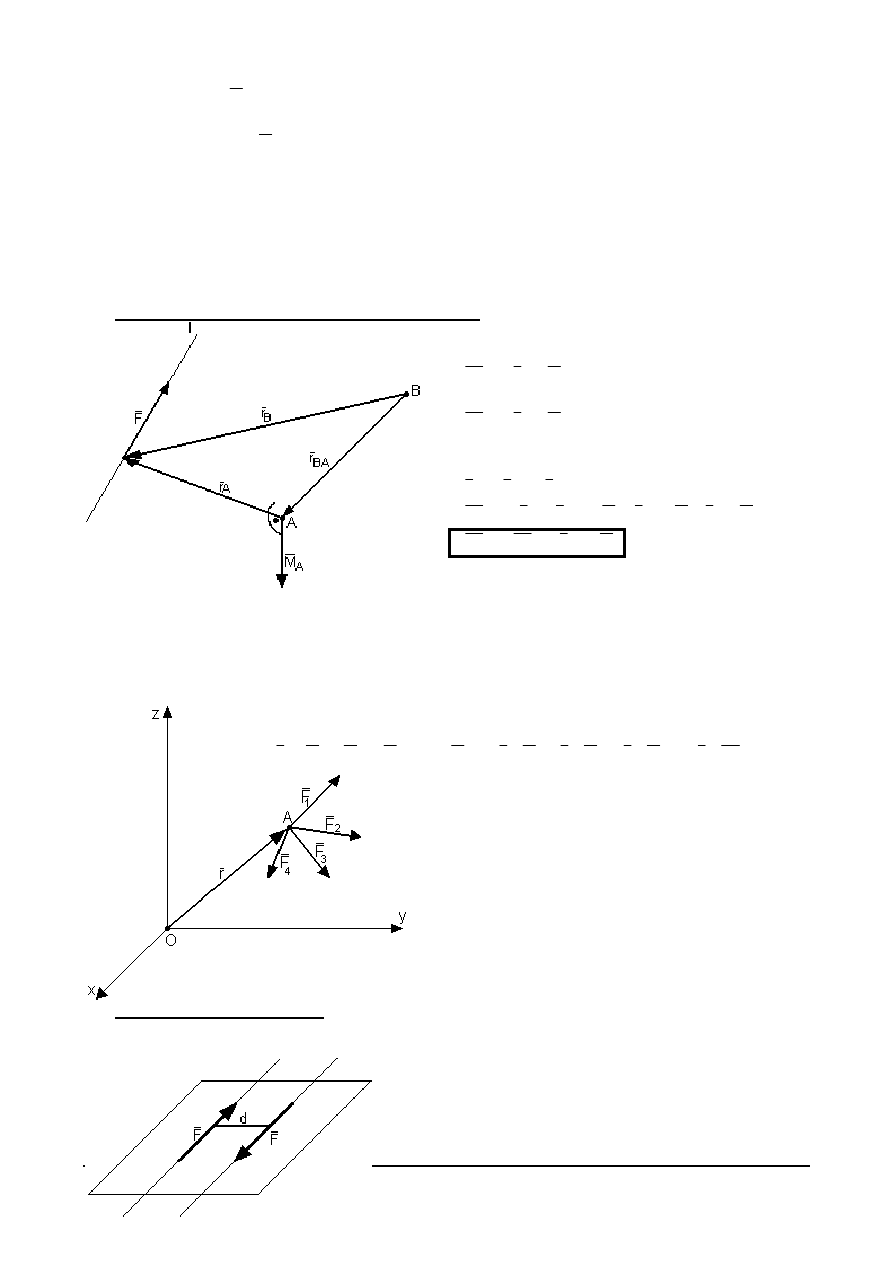
Zmiana bieguna ( punktu O ) momentu siły.
Moment względem punktu A:
F
r
M
A
A
×
=
Moment względem punktu B:
F
r
M
B
B
×
=
Patrz rysunek – dodawanie wektorów metodą
trójkąta:
A
BA
B
r
r
r
+
=
F
r
F
r
F
r
r
M
A
BA
BA
A
B
×
+
×
=
×
+
=
)
(
F
r
M
M
BA
A
B
×
+
=
Moment siły względem punktu B jest równy sumie dwóch momentów, z których jeden
obliczany jest względem dowolnego punktu, natomiast drugi jest momentem tej siły
uczepionym w punkcie A liczonym względem punktu B.
Twierdzenie Varignona. Moment sumy sił względem dowolnego punktu jest równy sumie
momentów poszczególnych sił względem tego punktu.
n
n
F
r
F
r
F
r
F
r
F
F
F
F
r
×
+
×
+
×
+
×
=
+
+
+
+
×
...
)
...
(
3
2
1
3
2
1
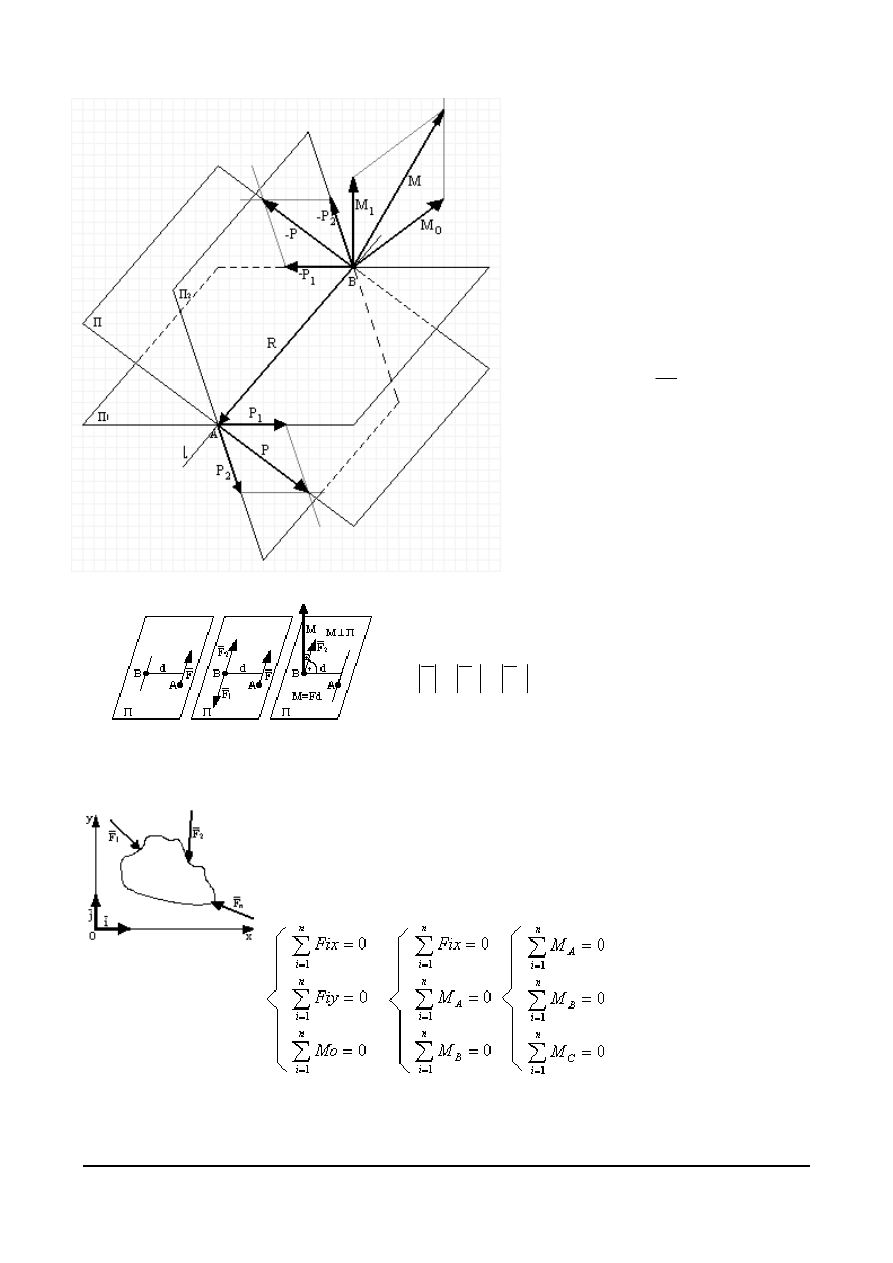
Para sił i jej własności. Układ dwóch sił równoległych o takich samych wartościach
liczbowych lecz przeciwnie zwróconych nazywamy parą.
d – ramię pary sił
Więcej na www.chomikuj.pl/MarWag987
Wypadkowa pary sił równa się zero, czyli pary sił nie można zastąpić jedną siłą.
Oddziaływanie pary sił wyraża się momentem pary sił.
Momentem pary sił – jest wektor prostopadły do płaszczyzny działania pary sił, o
wartości równej iloczynowi wartości
siły i ramienia, o zwrocie zgodnym
z regułą śruby prawo skrętnej.
d
F
M
O
•
=
|
|
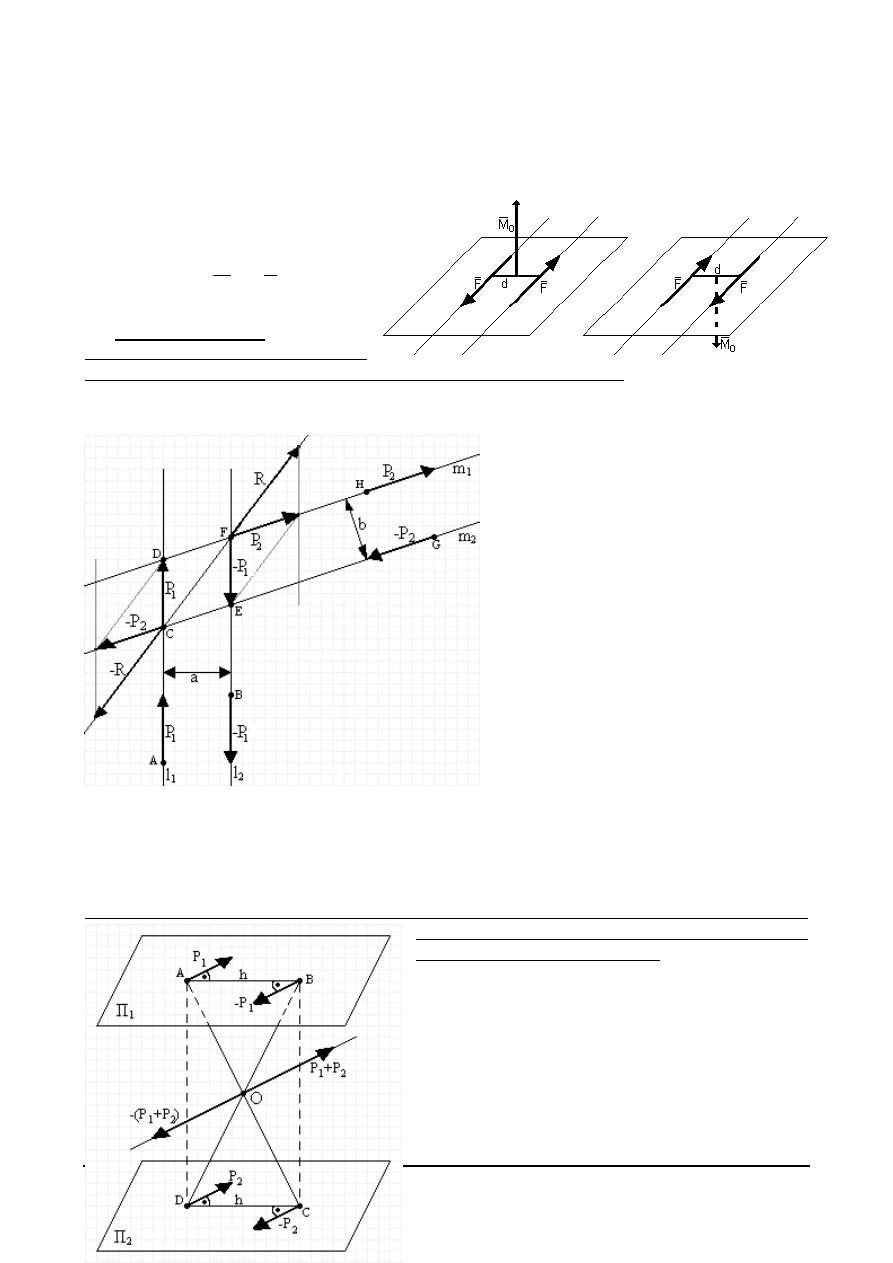
Własności pary sił:
I Dwie pary sił o tej samej
płaszczyźnie działania są sobie równe, gdy posiadają równe momenty.
Dowód pierwszej własności:
Na rysunku przedstawiono parę sił
P
1
i P
2
o liniach działania l
1
i l
2
,
których moment: M
1
=P
1
a.
Prowadząc dwie dowolne proste m
1
i
m
2
, otrzymamy punkty C, D, E, F. Siły
P
1
i -P
1
przyłożone do punktów A i B
możemy przesunąć do punktów C i F.
Na prostej przechodzącej przez punkty
C i F przykładamy układ sił R i -R
równy zeru. Po złożeniu sił P
1
i -R
oraz -P
1
i R otrzymamy siły
wypadkowe P
2
i –P
2.
Z
równości obu
równoległoboków sił, zbudowanych w
punktach C i F, wynika że siły P
2
i -P
2
tworzą parę sił równoważną parze sił P
1
i -P
1
, bo różnią się tylko o układ
równoważny zeru: M
2
=P
2
b=P
1
a=M
1
II Zachowując niezmieniony moment, parę sił można przenieść do dowolnej płaszczyzny
równoległej do jej płaszczyzny działania nie
zmieniając równowagi układów.
Dowód drugiej własności:
Mamy parę sił P
1
i -P
1
w odległości h, leżącą
na płaszczyźnie
∏
1
. Na płaszczyźnie równoległej
∏
2
do ∏
1
umieszczamy
dwa układy równoważne
zeru sił P
2
i -P
2
w tej samej odległości h.
Zakładamy, że siły P
2
i -P
2
są równe sile P
1
.
wypadkowa sił jednakowo zwróconych P
1
i P
2
Więcej na www.chomikuj.pl/MarWag987
wynosi ( P
1
+ P
2
) i przyłożona jest w punkcie O. Podobnie wypadkowa sił -P
1
i -P
2
równa
się sile wypadkowej -( P
1
+ P
2
) i przy łożona jest także w punkcie O. Siły wypadkowe
równoważą się, tworząc w punkcie O układ równoważny zeru. Z całego układu pozostaną,
wówczas siły P
2
i –P
2
tworząc parze sił równoważną parze sił P
1
i -P
1
. otrzymaną parę sił
P
2
i -P
2
możemy na podstawie pierwszego twierdzenia zastąpić w płaszczyźnie
∏
2
dowolną,
inną parą sił o tym samym momencie.
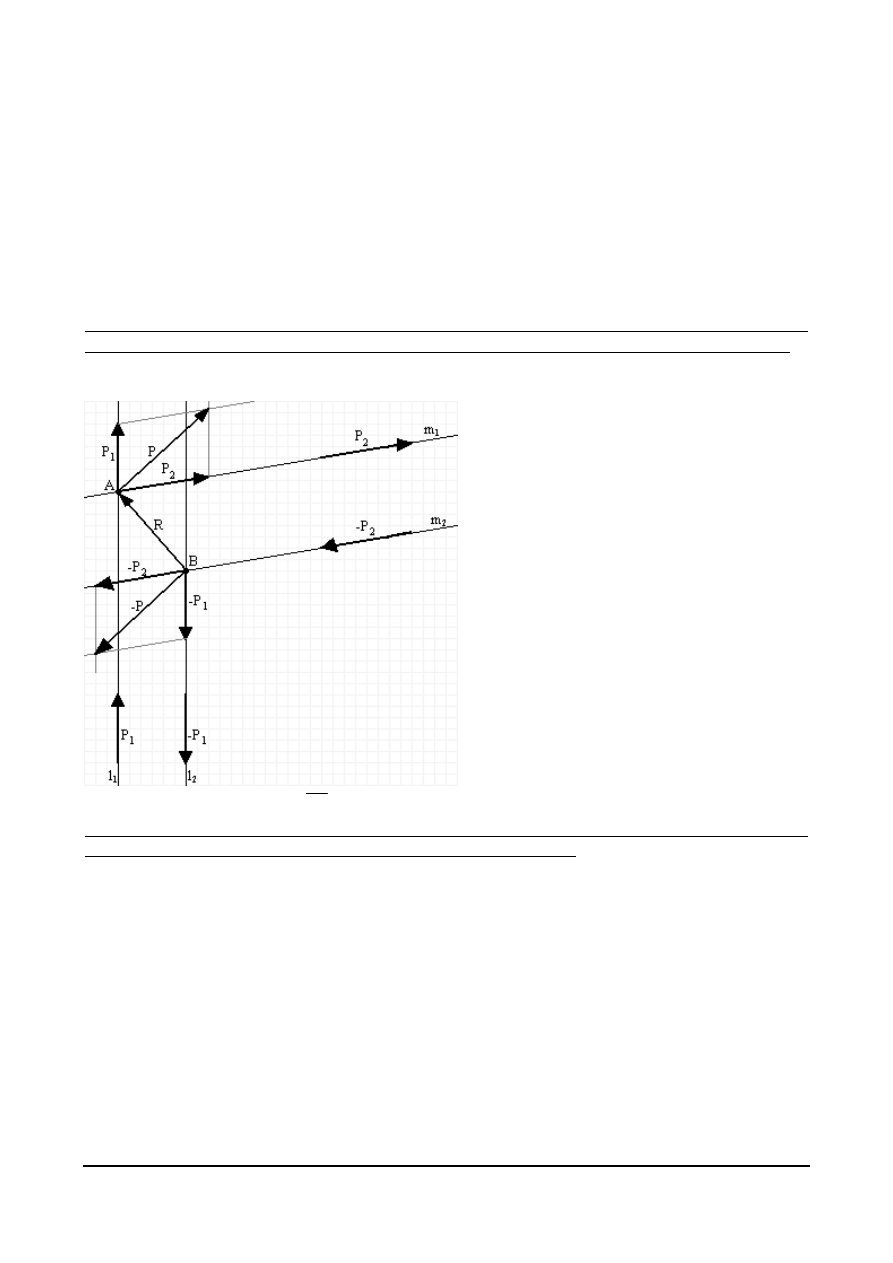
III Dwie pary sił działające w jednej płaszczyźnie można zastąpić przez jedną parę sił,
działającą w tej samej płaszczyźnie o momencie równym sumie momentów dwóch par sił.
Dowód trzeciej własności:
Mamy dwie pary sił P
1
i -P
1
oraz P
2
i
-P
2
. siły wchodzące w skład tych par
możemy przesunąć wzdłuż ich linii
działania l
1
i l
2
oraz m
1
i m
2
do punktów
A i B. Po złożeniu sił P
1
i P
2
oraz -P
1
i
–P
2
otrzymamy wypadkowe P i -P.
P=P
1
+P
2
-P=-P
1
-P
2
Stąd wynika, że siły P i -P stanowią
parę sił. Jest to para stycznie równoważna
układowi par ( P
1
, -P
1
) i ( P
2
, -P
2
),
ponieważ powstała z tych par przez
zastosowanie zasad statyki. Po oznaczeniu
przez M
1
, M
2
, M momentów par ( P
1
, -P
1
),
( P
2
, -P
2
) i ( P, -P ) oraz
r
BA
=
:
2
1
2
1
2
1
)
(
M
M
P
r
P
r
P
P
r
P
r
M
+
=
×
+
×
=
+
×
=
×
=
IV Dwie pary sił działające w przecinających się płaszczyznach są równoważne jednej parze
sił o momencie równym wektorowej sumie momentów tych par.
Dowód czwartej własności:
Więcej na www.chomikuj.pl/MarWag987
Mamy dwie pary sił ( P
1
, -P
1
) i
( P
2
, -P
2
), o momentach M
1
i M
2
,
działające
odpowiednio
w
płaszczyznach
∏
1
i
∏
2
, przecinające
się wzdłuż prostej l. Przyłożone do
punktu A siły P
1
i P
2
zastępujemy
wypadkową P, a siły -P
1
i -P
2
wypadkową -P.
P=P
1
+P
2
-P=-P
1
-P
2
Co oznacza, że siły P i -P stanowią
parę równoważną układowi dwóch
par ( P
1
, -P
1
) i ( P
2
, -P
2
).
Oznaczając moment pary sił ( P, -P )
przez M oraz
r
BA
=
:
2
1
2
1
2
1
)
(
M
M
P
r
P
r
P
P
r
P
r
M
+
=
×
+
×
=
=
+
×
=
×
=
Twierdzenie o równoległym
przesunięciu sił.
Do punktu B przykładamy siły zerowe F
1
i F
2
,
siła F
1
równoważy siłę F.
2
1
F
F
F
=
=
Płaski dowolny układ sił.
Płaskim układem sił – nazywamy taki układ, w którym siły zewnętrzne czynne i bierne leżą
w jednej płaszczyźnie.
Warunki równowagi dowolnego układu sił.
Dowolny płaski układ sił jest w równowadze jeśli algebraiczne
sumy wszystkich rzutów sił na osie układu i suma momentów
wszystkich sił względem dowolnie obranego bieguna na płaszczyźnie
działania tych sił są równe zeru.
Punkty ABC nie mogą leżeć na jednej linii.
Szczególny przypadek: warunki równowagi płaskiego zbieżnego układu sił.
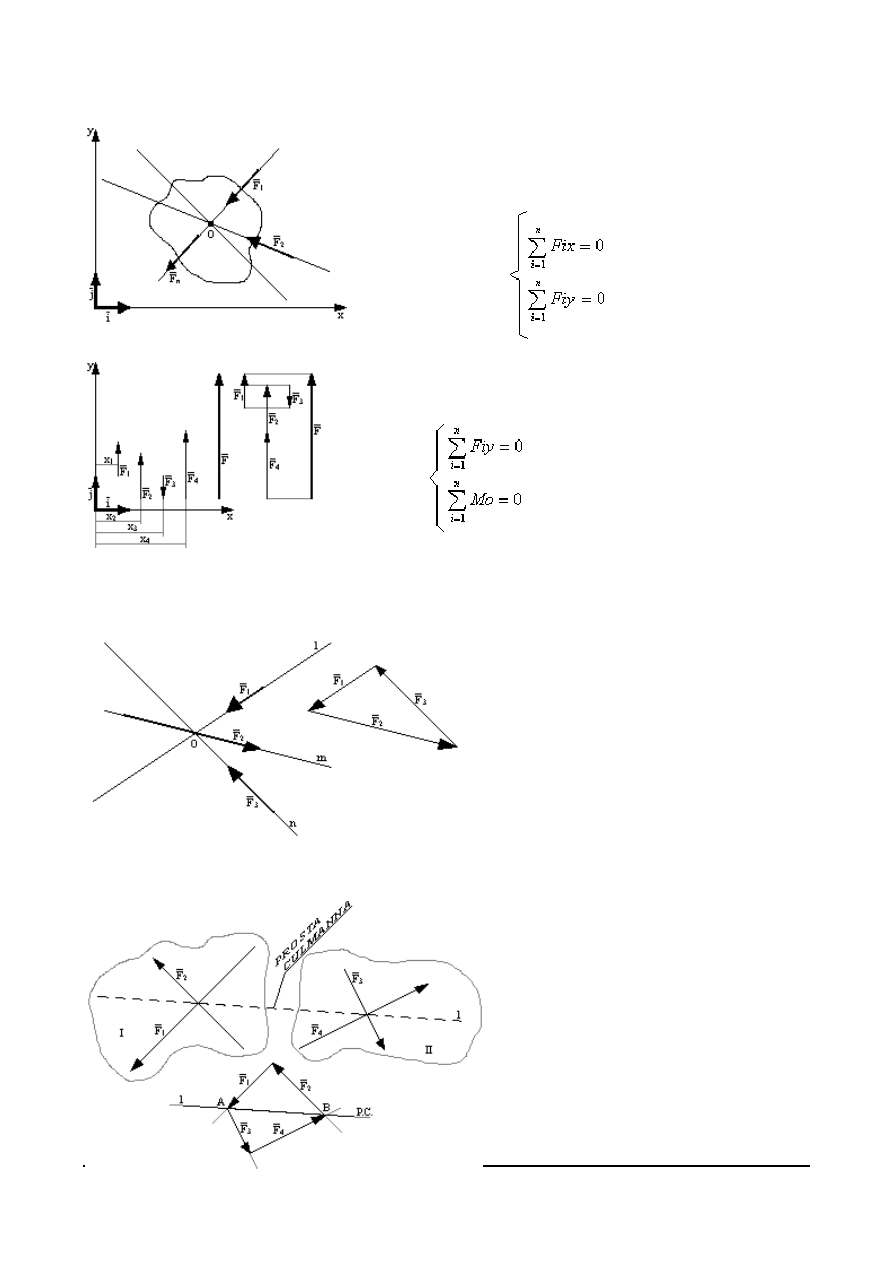
Więcej na www.chomikuj.pl/MarWag987
Układem sił zbieżnych – nazywamy układ, w którym linie działania się przecinają się w
jednym punkcie.
Siły zbieżne leżące w jednej płaszczyźnie są w
równowadze jeżeli sumy rzutów tych sił na dwie osie
prostokątnego układu współrzędnych są równe zero.
Płaski układ sił równoległych.
Poszczególne siły rzutujemy na oś y, powstaje siła F,
która musi spełnić:
Geometryczne warunki równowagi układów sił na
płaszczyźnie.
Równowaga trzech sił na płaszczyźnie. Trzy siły leżące na jednej płaszczyźnie są w
równowadze w tedy gdy kierunki działania tych sił przecinają się w jednym punkcie, siły
zaś tworzą trójkąt zamknięty o zgodnym obiegu strzałek.
Równowaga czterech sił na płaszczyźnie. Cztery siły leżące na płaszczyźnie są w
równowadze wtedy gdy wypadkowe par sił wchodzących w skład czwórki sił mają te same
wartości, przeciwne zwroty i leżą, na prostej działania łączącej punkty przecięcia par sił.
Kierunki par sił muszą się przecinać, Prosta
Culmanna ( domniemana siła ) dla sił F
1
, F
2
ma zwrot AB, a dla sił F
3
, F
4
zwrot BA.
Więcej na www.chomikuj.pl/MarWag987
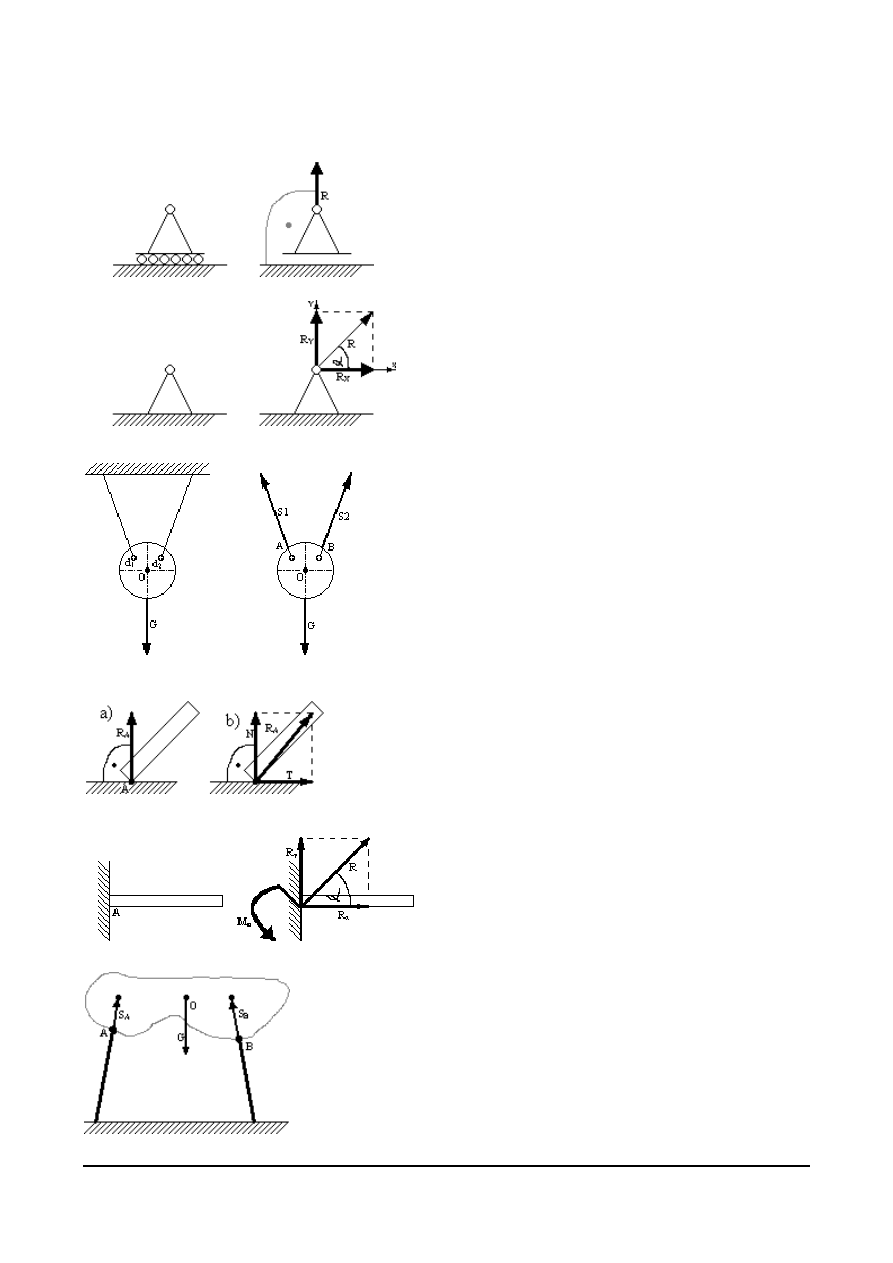
Rodzaje podpór:
1.
Podpora przegubowa przesuwna:
Jedna niewiadoma reakcja R.
2.
Podpora przegubowa stała:
Dwie niewiadome reakcje R
x
i R
y
( lub R i α )
3.
Zawieszenie na cięgnach wiotkich:
Dwie niewiadome S
1
i S
2
4.
Podparcie na gładkiej lub chropowatej powierzchni:
a) więzły idealne
b) więzły normalne ( z tarciem )
5.
Utwierdzenie sztywne:
Trzy niewiadome R
x
, R
y
i Mo ( moment utwierdzenia )
6.
Pręt przegubowy:
Po jednej niewiadomej na każdy pręt
Więcej na www.chomikuj.pl/MarWag987
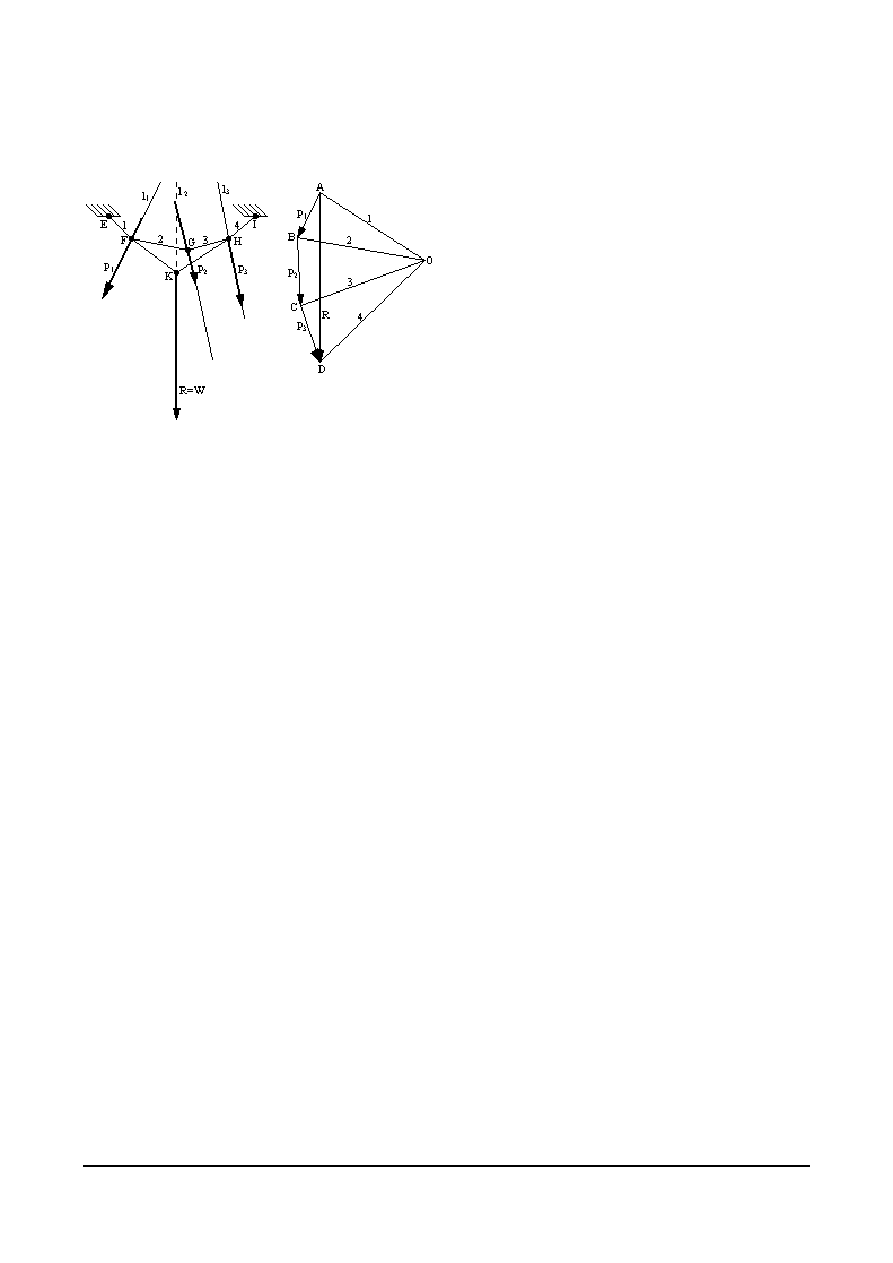
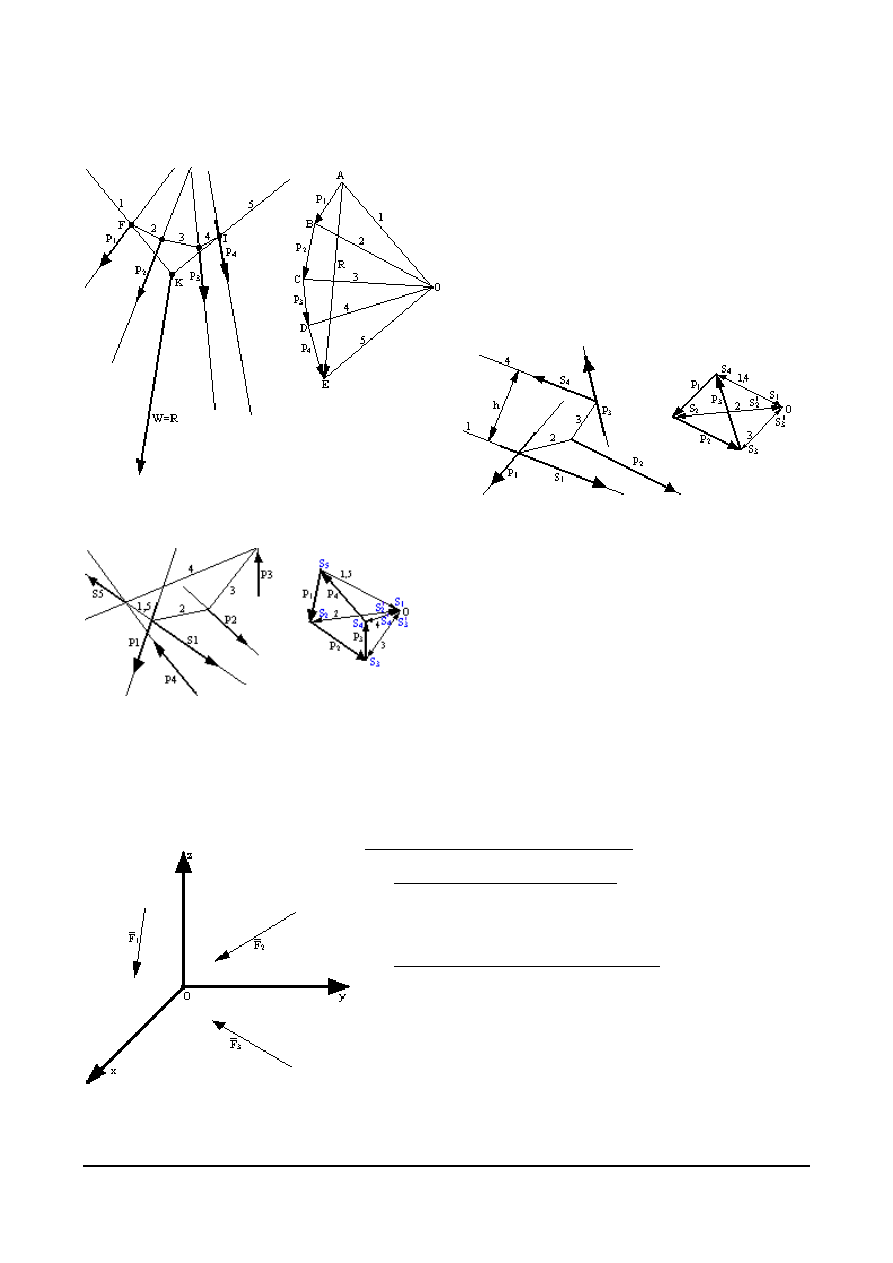
Zastosowanie metody wieloboku sznurowego do redukcji płaskiego układu sił.
Dane są trzy siły P
1
, P
2
, P
3
działające w jednej płaszczyźnie, wzdłuż prostych l
1
, l
2
i l
3
.
Jeżeli chcemy znaleźć wypadkową W tych
sił, to należy zbudować wielobok ABCD.
Wartość i kierunek wypadkowej określa
zamykający bok AD ( wektor główny R )
wieloboku sił. Pozostaje jeszcze kreślić w
planie sił punkt, przez który przechodzi linia
działania tej wypadkowej. W tym celu w
wieloboku sił obieramy dowolny punkt O,
zwany biegunem, i łączymy go promieniami
1, 2, 3, 4 z początkiem i końcem każdej z sił
P
1
, P
2
, P
3
. jak wynika z wieloboku sił, na trzy
siły przypadają cztery promienie. W ogólnym
przypadku na n sił przypada n+1 promieni.
Przy tym sposobie oznaczenia promień 1 łączy biegun O z wierzchołkiem wieloboku sił, w
którym znajduje się początek siły P1, następnie promień 2 łączy biegun O z wierzchołkiem
wieloboku sił, w którym znajduje się początek siły P
2
itd.
W planie sił z dowolnego punktu F, położonego na prostej l
1
( linia działania siły P
1
),
prowadzimy proste równoległe do promieni 1 i 2. Prosta równoległa do promienia 2 przecina
prostą l
2
( linię działania siły P
2
) w punkcie G. Z tego punktu prowadzimy prostą
równoległą do promienia 3, aż do przecięcia się z prostą l
3
( linia działania siły P
3
) w punkcie
H, z którego prowadzimy prostą równoległą do promienia 4.
Sposób rysowania prostych równoległych planie sił jest taki, że każdemu trójkątowi ( P
1
,
1, 2 ) w wieloboku sił odpowiada w planie sił węzeł F, w którym przecina się linia działania
siły P
1
z prostymi równoległymi do promieni 1 i 2. ostatecznie otrzymujemy w planie sił
linię łamaną EFGHI ( 1, 2, 3, 4 ), nazwaną wielobokiem sznurowym. Następnie rozkładamy
każdą z sił P
1
, P
2
, P
3
na składowe wzdłuż wieloboku sznurowego. Tak więc siłę P
1
rozkładamy na S
1
i S
2
, siłę P
3
na składowe S
3
i S
4
. Wielkości i zwroty tych składowych
odczytujemy z wieloboku sił, gdzie P
1
=S
1
+S
2
, P
2
=S
2
'+S
3
, P
3
=S
3
'+S
4
, S
2
'=-S
2
, S
3
'=-S
3
.
W ten sposób dany układ sił ( P
1
, P
2
, P
3
) zastępuje się równoważnym mu statycznie
układem sił ( S
1,
S
2
, S
2
', S
3
, S
3
', S
4
). Ale siły S
2
i S
2
' oraz S
3
i S
3
' ( jako parami równe co do
wartości i przeciwnie skierowane ) równoważą się wzajemnie. Pozostają jedynie siły S
1
i S
4
działające wzdłuż skrajnych boków 1 i 4 wieloboku sznurowego. Wypadkowa W sił S
1
i S
4
jest równocześnie wypadkową sił P
1
, P
2
i P
3
, a jej linia działania – prosta l – przechodzi w
planie sił przez punkt K przecięcia boków 1 i 4 wieloboku sznurowego i jest równoległa do
wektora głównego R ( boku AD wieloboku sił ). Podobnie wyznacza się wypadkową
dowolnej liczby sił działających w jednej płaszczyźnie ( oczywiście przy założeni, że
wypadkowa istnieje ).
Na podstawie dotychczasowych rozważań możemy stwierdzić, że:
Dowolny płaski układ sił można zastąpić przez dwie siły, działające wzdłuż skrajnych
boków wieloboku sznurowego. Wartości tych sił są wyrażone przez długości odpowiednich
promieni wieloboku sił, a zwroty są takie, że wektorowa suma tych sił jest równa wektorowi
głównemu R. Linia działania wypadkowej W=R przechodzi przez punkt przecięcia skrajnych
boków wieloboku sznurowego.
Korzystając z tych spostrzeżeń, możemy przy określaniu wypadkowej płaskiego układu sił
nie wyznaczać sił składowych S
1,
S
2
, S
2
', S
3
, S
3
', S
4
..., itd., które wyznaczaliśmy w celu
wyjaśnienia konstrukcji wieloboku sznurowego.
Więcej na www.chomikuj.pl/MarWag987
Na poniższym rysunku przedstawiono sposób określania wypadkowej czterech sił
działających w jednej płaszczyźnie. Wartości wypadkowej i jej kierunek określa zamykający
bok AE wieloboku ABCDE, a jej linia działania przechodzi przez punkt K, będący punktem
przecięcia się skrajnych boków wieloboku sznurowego 1 i 5.
W dotychczas rozważanych przykładach
układy sił redukowały się do siły
wypadkowej, gdyż odpowiadające im
wieloboki sił nie zamykały się. Weźmy teraz
pod uwagę przypadek, gdy wektor główny R
jest równy zeru, tzn., że wielobok sił jest
zamknięty i ma zgodny obieg wektorów sił
P
1
, P
2
, P
3
. W przypadku pierwszym ( obok,
prawa ) układ sił sprowadza się do pary sił S
1
i S
4
. Ramię h tej pary jest równe odległości między skrajnymi bokami wieloboku sznurowego
i i 4.
W przykładzie drugim ( obok, lewo ) siły S
1
i S
5
równoważą się, gdyż pierwszy bok
wieloboku sznurowego 1 pokrył się z ostatnim 5,
co oznacza, że układ sił ( P
1
, P
2
, P
3
, P
4
) jest w
równowadze.
Przy redukcji płaskiego układu sił mogą
występować następujące przypadki:
1.
Wielobok sił nie zamyka się – układ sił
redukuje się do jednej siły wypadkowej.
2.
Wielobok sił zamyka się, a wielobok sznurowy nie zamyka się - układ sił redukuje się do
pary sił.
3.
Wielobok sił zamyka się i wielobok sznurowy również się zamyka – układ sił znajduje
się w równowadze.
Dowolny układ sił w przestrzeni.
Przestrzennym układem sił – nazywamy układ o
dowolnie rozmieszczonych w przestrzeni liniach działania.
Warunki równowagi dowolnego przestrzennego
układu sił.
Przestrzenny dowolny układ sił znajduje się w
równowadze jeżeli algebraiczne sumy rzutów wszystkich
sił na trzy osie układu współrzędnych i algebraiczne
sumy momentów wszystkich sił względem tych osi są
równe zero.
Równania równowagi:
Więcej na www.chomikuj.pl/MarWag987
0
0
0
1
1
1
=
=
=
∑
∑
∑
=
=
=
n
i
n
i
n
i
Fiz
Fiy
Fix
0
0
0
1
1
1
=
=
=
∑
∑
∑
=
=
=
n
i
z
n
i
y
n
i
x
M
M
M
Przestrzenny układ sił zbieżnych:
Przestrzenny układ sił zbieżnych – znajduje się w równowadze gdy sumy rzutów wszystkich
sił na trzy osie prostokątnego układu współrzędnych są równe zero.
Równania równowagi:
∑
∑
∑
=
=
=
=
=
=
n
i
n
i
n
i
Fiz
Fiy
Fix
1
1
1
0
0
0
Przestrzenny układ sił równoległych:
Warunki równowagi przestrzennego układu sił
równoległych – suma rzutów sił na oś równoległą do
kierunku działania sił jest równa zero oraz równania
momentów względem osi leżących na płaszczyźnie
prostopadłej do kierunku działania sił są równe zero.
∑
∑
∑
=
=
=
=
=
=
=
=
n
i
y
n
i
x
n
i
Fiyi
M
Fixi
M
F
1
1
1
0
0
0
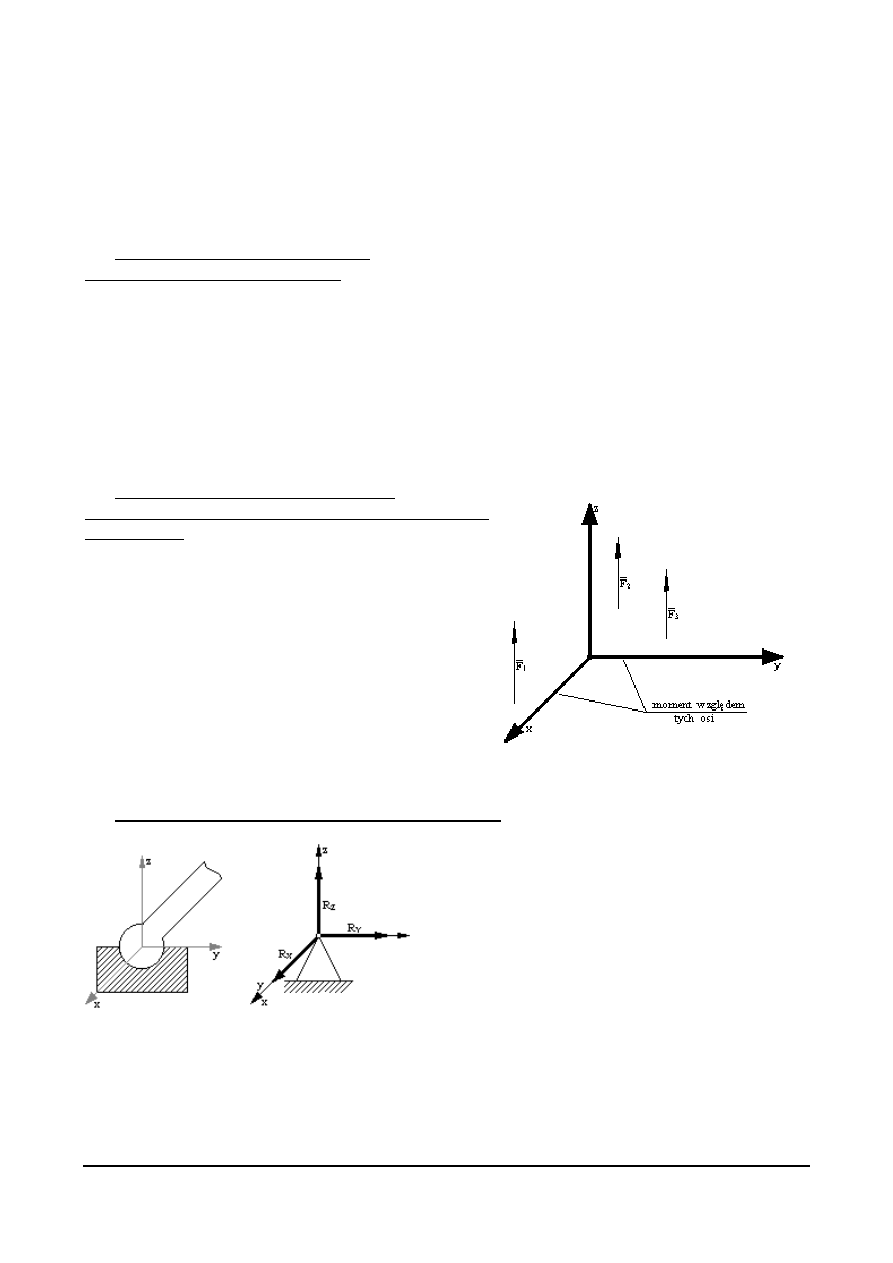
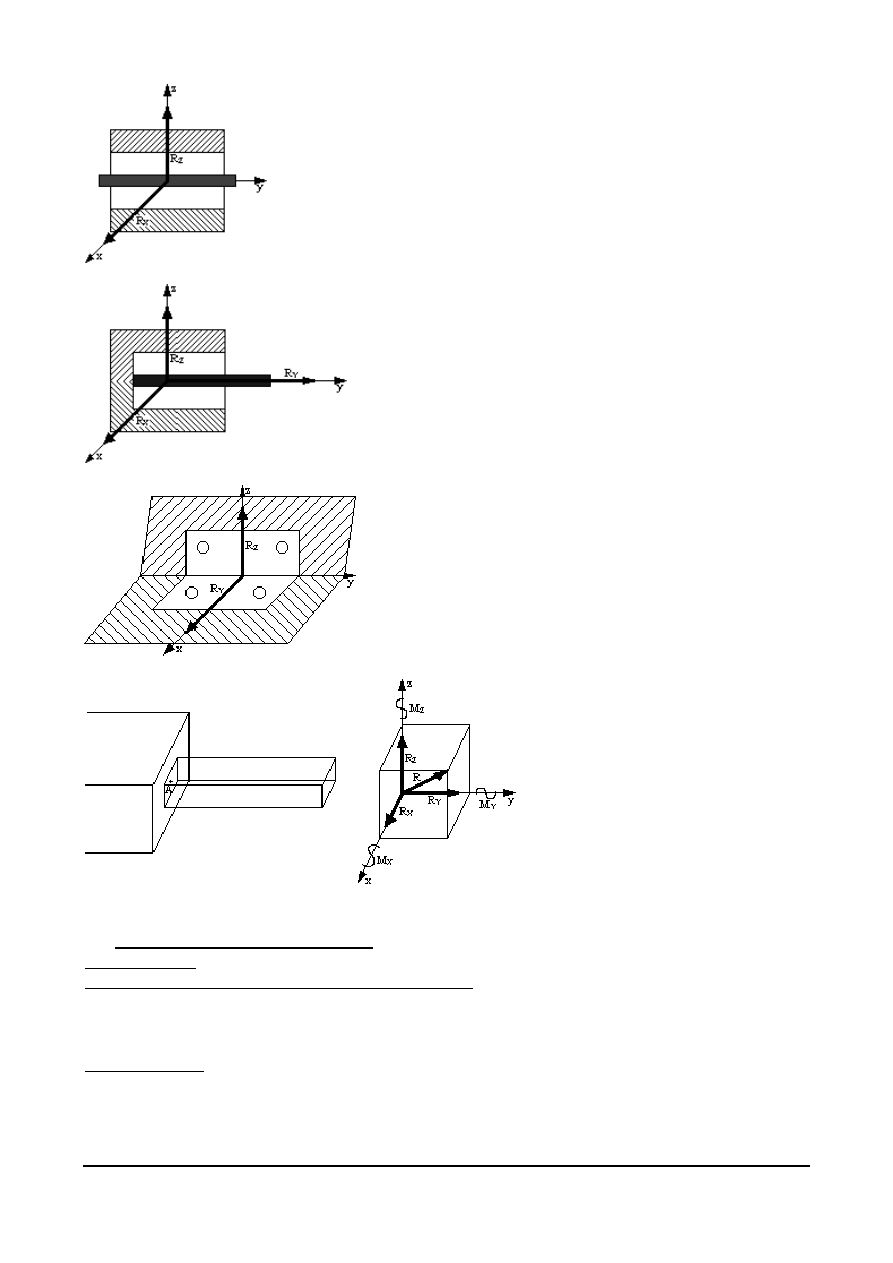
Sposoby podparcia w układach przestrzennych:
1. Przegub kulisty.
2. Łożysko szyjne.
Więcej na www.chomikuj.pl/MarWag987
3. Łożysko oporowe lub stopowe.
4. Zawias.
5. Usztywnienie całkowite.
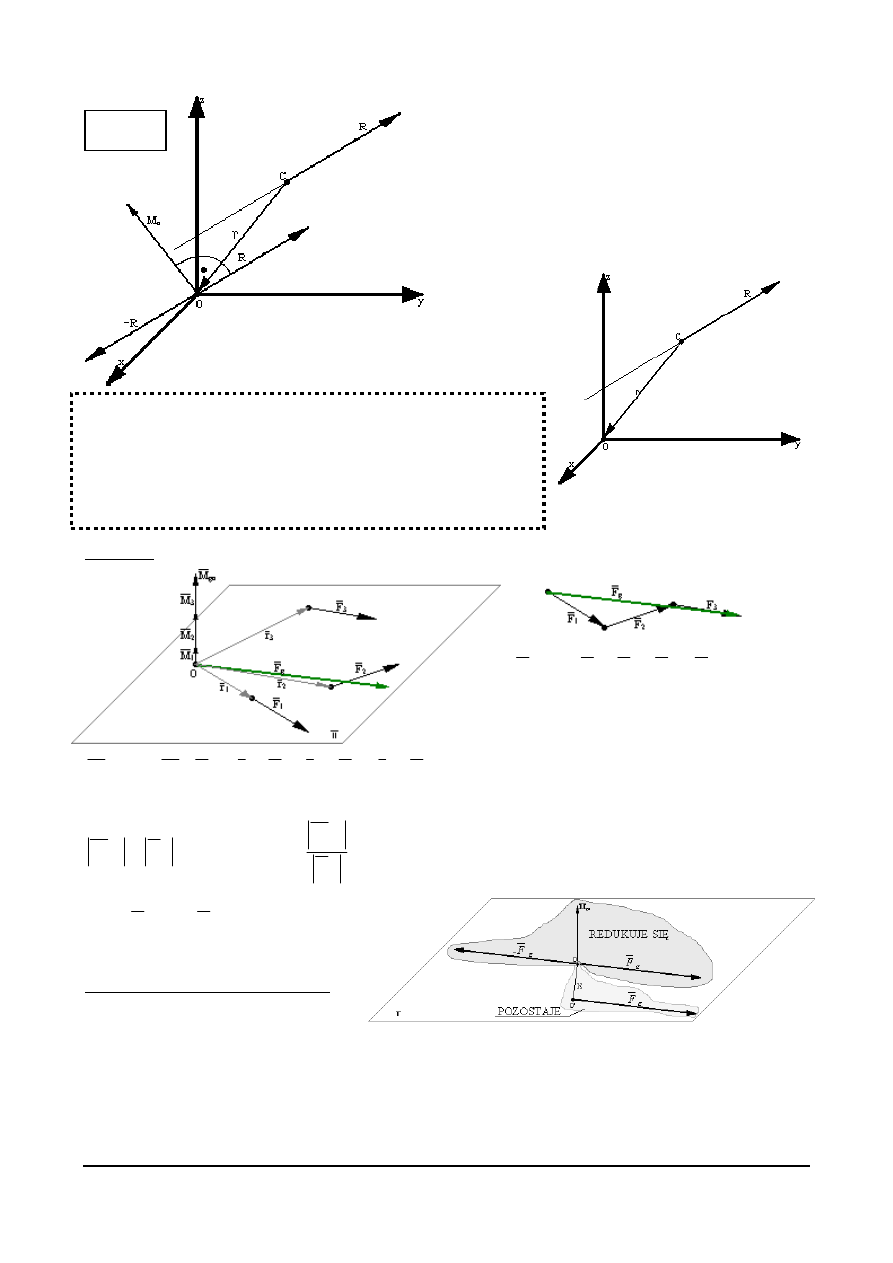
Redukcja dowolnego układu sił.
Przez redukcję układu sił rozumiemy przekształcenie układu w możliwie najprostszy.
Elementy redukcji dowolnego płaskiego układu sił:
- wektor główny F
g,
- moment główny M
g,
- parametr układu tzw. wyróżnik k ( p ).
Wektor główny – równy jest sumie geometrycznej wszystkich sił układu traktowanych jako
wektory swobodne. Wektor główny nie zależy od bieguna do którego redukujemy układ sił.
Więcej na www.chomikuj.pl/MarWag987
i
F
F
n
i
g
∑
=
=
1
2
2
2
gz
gy
gx
g
F
F
F
F
+
+
=
g
gz
g
gy
g
gx
F
F
F
F
F
F
=
=
=
γ
β
α
cos
cos
cos
Moment główny ( ogólny ) – równy jest sumie momentów wszystkich sił względem bieguna
redukcji O. Moment główny zależy od wyboru bieguna.
∑
=
=
n
i
o
go
M
M
1
Parametr układu ( wyróżnik ) – to iloczyn skalarny wektora głównego i momentu ogólnego.
go
g
M
F
k
o
=
, czyli:
goz
gz
goy
gy
gox
gx
M
F
M
F
M
F
k
+
+
=
k≤0
Przypadki redukcji dowolnego układu sił.
WEKTOR GŁÓWNY
g
F
MOMENT GŁÓWNY
go
M
PARAMETR UKŁĄDU
k
WYNIK REDUKCJI
=0
=0
=0
UKŁĄD W
RÓWNOWADZE
=0
≠0
=0
PARA SIŁ
≠0
=0
=0
WYPADKOWA
≠0
≠0
≠0
(
go
g
M
F
)SKRĘTNIK,
DWIE SIŁY SKOŚNE
i
F
g
F
n
i
∑
=
=
1
2
2
goy
gox
go
M
M
M
+
=
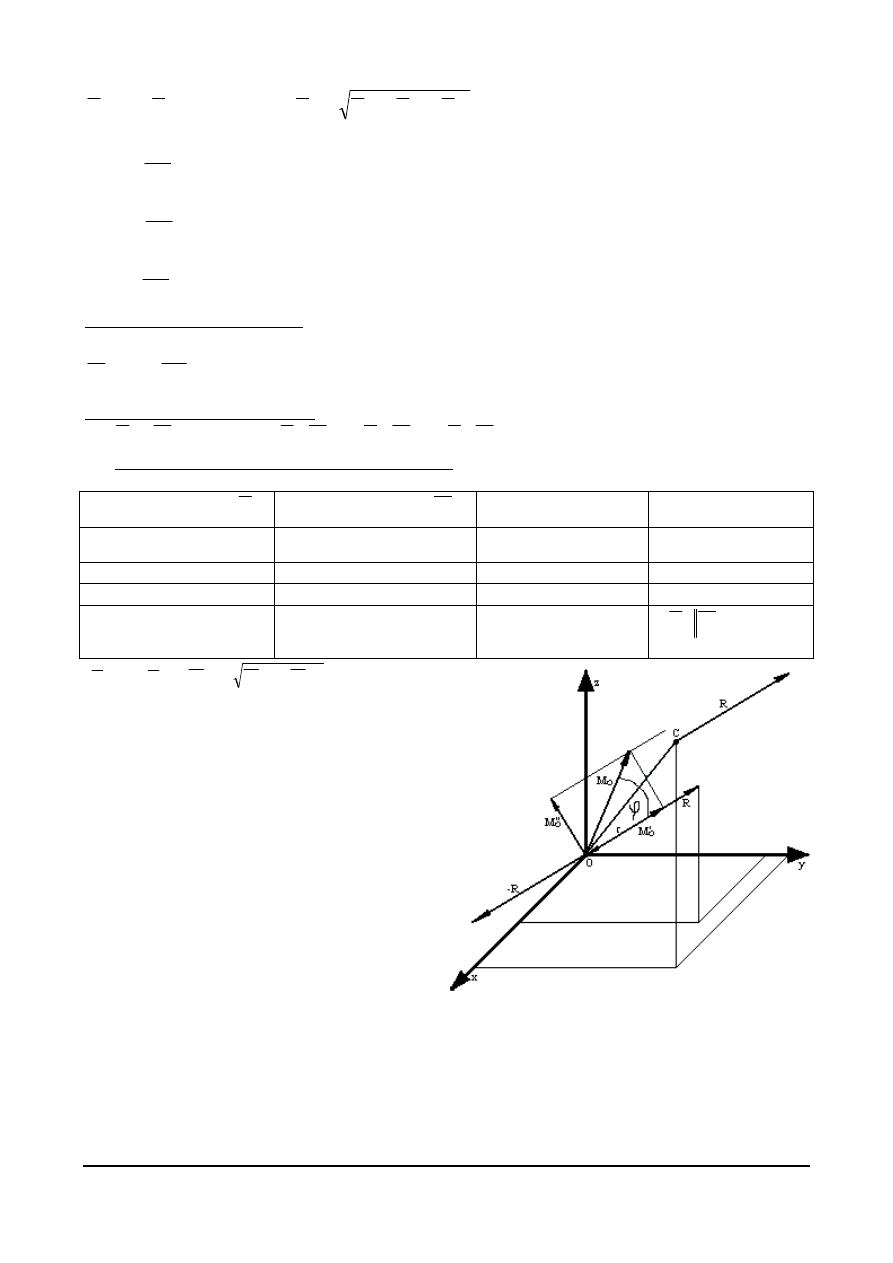
Redukcja dowolnego przestrzennego
układu sił do skrętnica.
Układ wektora głównego R i momentu
głównego M
go
, obliczonego względem środka
redukcji O, spróbujmy zredukować do
prostszej postaci. Niech wektory R i M
o
będą
przyłożone w punkcie O, początku układu
współrzędnych.
Rozłóżmy moment główny M
o
na dwie
składowe: M'
o
- zgodną z kierunkiem wektora
głównego R i M''
o
– prostopadłą do tego
wektora.
Następnie
składową
M''
o
zastępujemy parą sił ( -R, R ), leżącą w
płaszczyźnie prostopadłej do M''
o,
przy czym
siła ( -R ) jest przyłożona w punkcie O. Linia działania drugiej siły R będzie przechodzić
przez pewien szczególny punkt, którego położenie jest opisane promieniem – wektorem r,
wynikającym z następującej zależności:
R
r
M
o
×
=
′′
, która określa równoważność
zastępowania wektora M''
o
parą sił ( -R, R ). W wyniku tych przekształceń otrzymaliśmy
dwie siły ( -R, R ), przyłożone w punkcie O, które można usunąć jak układ równoważący
się. Cały układ redukuje się wówczas do siły R przyłożonej do punktu głównego M'
o
Więcej na www.chomikuj.pl/MarWag987
równoległej do R.
ϕ
cos
o
o
M
R
R
M
=
′
, gdzie
R
R
- wektor jednostkowy ( wersor ) o kierunku i
zwrocie wektora R, natomiast cosφ – cosinusem kąta między wektorami R a M
o
.
o
oz
z
oy
y
ox
x
RM
M
R
M
R
M
R
+
+
=
ϕ
cos
. Ponieważ wektor M'
o
jest wektorem swobodnym, więc
można go
przenieść do punktu C.
Tak więc wykazaliśmy, że dowolny przestrzenny układ n sił można zredukować do dwóch
wektorów
kolinearnych:
wektora
głównego
R,
określanego
wzorem
∑
=
=
+
+
+
=
n
i
h
Pi
P
P
P
R
1
2
1
...
i wektora M'
o
, określanego zależnością
ϕ
cos
o
o
M
R
R
M
=
′
. Taki
prosty układ tych wektorów nazywa się skrętnikiem, a ich linia działania, przechodząca
przez punkt C, nazywa się osią centralną układu sił Pi.
Układ złożony z wektora głównego i składowej
momentu głównego M'
o,
leżącej na linii działania
wektora R, nazywamy skrętnikiem.
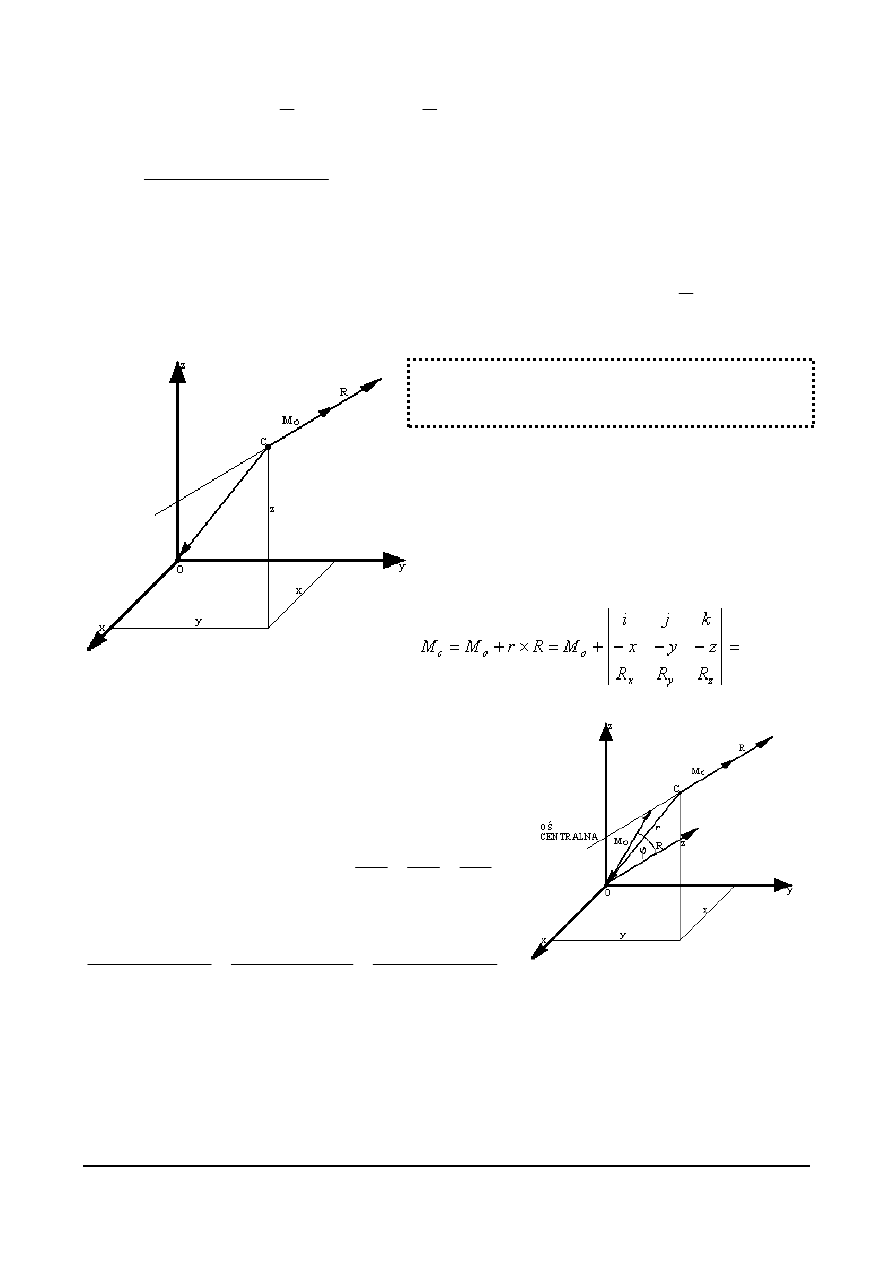
Równanie osi centralnej wyznaczamy,
redukując wektor główny R i moment główny M
o
( obliczony względem środka redukcji O ) do
innego środka redukcji, którym jest punkt C.
Moment główny M
c
względem punktu C,
opisanego promieniem wektorem r o składowych
( -x, -y, -z ) na podstawie wzory
R
r
M
M
o
×
+
=
1
0
1
wynosi:
k
y
R
z
R
j
z
R
x
R
i
z
R
y
R
k
M
j
M
i
M
k
M
j
M
i
M
x
y
x
z
y
z
oz
oy
ox
z
c
y
c
x
c
)
(
)
(
)
(
+
−
+
−
+
+
−
+
+
+
=
+
+
=
stąd otrzymujemy składowe wektora głównego M
c
:
M
cx
=M
ox
-R
z
y+R
y
z
M
cy
=M
oy
-R
z
x-R
x
z
M
cz
=M
oz
-R
y
x+R
x
y
Ponieważ punkt C leży na osi centralnej, więc M
c
= M'
o
.
Wówczas wektory R i M
c
, jako kolinearne, muszą być
wzajemnie proporcjonalne, czyli
z
cz
y
cy
x
cx
R
M
R
M
R
M
=
=
, a
po podstawieniu wyrażeń ( M
cx,
M
cy,
M
cz
) otrzymamy
ostatecznie:
z
x
y
oz
y
x
z
oy
x
y
z
ox
R
y
R
x
R
M
R
z
R
x
R
M
R
z
R
y
R
M
+
−
=
−
+
=
+
−
,
związki te przedstawiają dwa niezależne równania liniowe z trzema niewiadomymi ( x, y, z ),
będące równaniem osi centralnej układu sił. Prosta ta ma takie same cosinusy kierunkowe jak
wektor główny układu R.
Redukcja dowolnego przestrzennego układu sił do siły wypadkowej.
Szczególny przypadek redukcji przestrzennego układu sił otrzymujemy, gdy wektor
momentu głównego M
o
, obliczony względem dowolnego punktu O, będzie prostopadły do
wektora głównego R.
Więcej na www.chomikuj.pl/MarWag987
Składowa momentu głównego M'
o
( według
pierwszego rysunku do redukcji do skrętnika )
będzie równa zeru i
układ redukuje się wyłącznie do sumy
geometrycznej R, przechodzącej przez punkt C.
Oznacza to, że taki układ sił Pi daje się
zredukować wyłącznie do jednej siły R, która
jest wypadkową układu sił, leżącą na osi
centralnej układu. W tym przypadku oś
centralna staje się linią działania wypadkowej
( rysunek po
prawej ).
Warunkiem koniecznym i dostatecznym, aby
przestrzenny układ sił Pi redukował się do wypadkowej,
jest istnienie różnej od zera sumy geometrycznej R i
prostopadłości wektora momentu głównego M
o
względem
dowolnie wybranego punktu O do linii działania sumy
geometrycznej.
Przykład:
3
2
1
1
F
F
F
i
F
F
n
i
g
+
+
=
=
∑
=
3
3
2
2
1
1
1
)
(
F
r
F
r
F
r
i
F
M
M
n
i
o
go
×
+
×
+
×
=
=
∑
=
Wektor główny jest niezmiennikiem – nie zależy od bieguna redukcji.
x
F
M
g
go
o
=
g
go
F
M
x
d
=
=
- odległość między parą sił
Do układu sił dodajemy parę sił.
Siły F
g
i - F
g
równoważą się,
redukuje się również moment
główny, pozostaje tylko jedna siła
ale przesunięta o x od bieguna.
Rys a)
Wyszukiwarka
Podobne podstrony:
mechanika plynow id 291486 Nieznany
Mechanika budowli 4 id 290783 Nieznany
mechanika plynow id 291242 Nieznany
Notatki caly semestr id 321889 Nieznany
mechanizmy lewopolkulowe id 291 Nieznany
MECHANIKA PLYNOW 1 id 291255 Nieznany
MECHANIKA PLYNOW 2(1) id 291256 Nieznany
mechanika inzynieria id 291479 Nieznany
Mechanika analityczna id 290740 Nieznany
Mechana projekt2 id 290480 Nieznany
Mechanika 2011 id 291474 Nieznany
mechana 2 exam id 290474 Nieznany
Mechanika plynow 3(1) id 291260 Nieznany
Mechanika egzamin id 290860 Nieznany
kolokwia, II semestr id 240233 Nieznany
gotowiec hms 2 semestr id 19388 Nieznany
projekt mechanizm nac id 399063 Nieznany
mechanizm rynkowy id 291656 Nieznany
więcej podobnych podstron