
1
PODSTAWY ROBOTYKI
JW 14.11.1
Roboty w zastosowaniach
podwodnych

2
Spis treści
1. Historia nurkowania ................................................................................... 3
2. Niebezpieczeństwa czyhające na człowieka schodzącego pod wodę ........ 6
3. Początki robotów podwodnych .................................................................. 7
4. Zastosowanie robotów pod wodą ............................................................... 8
5. Budowa robota podwodnego ...................................................................... 9
6. Przykładowe roboty podwodne wykorzystywane do ciężkich
prac podwodnych ........................................................................................ ..10
7. Roboty wykorzystywane do przeprowadzania inspekcji podwodnych .....12
8. Współczesne koncepcje robotów inspekcyjnych .......................................13
9. Przyszłość robotów podwodnych .............................................................. 16
Bibliografia

3
1. Historia nurkowania
Ludzie nurkowali od wieków. W starożytnej Grecji nurkowie
wykorzystywani byli do celów militarnych jak również do pozyskiwania spod
wody gąbek. Najsłynniejszym z greckich nurków był bez wątpienia Scyllis. W
trakcie morskiej kampanii, Scyllis dostał się w niewolę Persów i został zabrany
na ich okręt wojenny. Uciekł z niewoli wyskakując za burtę okrętu, następnie
poczekał do zmierzchu pod wodę, co umożliwiła mu pusta w środku trzcina,
której użył jako rurki do oddychania.
Chęć nurkowania istniała od zawsze: żeby zdobywać pożywienie,
naprawiać statki, zatapiać je, i żeby po prostu obserwować podwodne życie.
Jednak dopóki człowiek nie odkrył sposobu na oddychanie pod wodą, każda z
wycieczek podwodnych była krótka.
Jak pozostać pod wodą dłużej? Oddychanie przez trzcinę pozwala na
zanurzenie ciała, jednak dość szybko okazało się, że trzcina o długości powyżej
2 stóp (ok. 60cm), nie spisuje się zbyt dobrze. Również pobieranie powietrza z
worka nie było najlepszym pomysłem z powodu dwutlenku węgla.
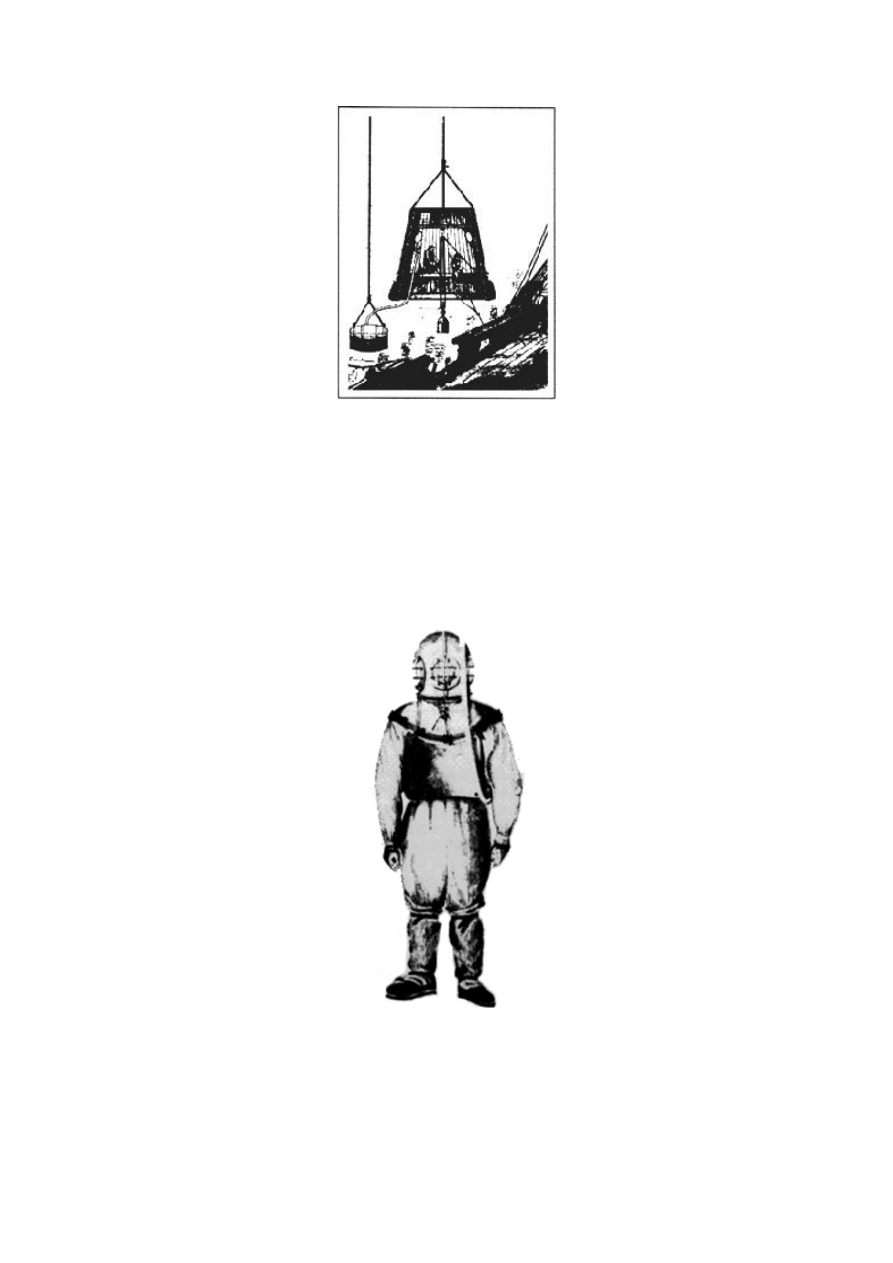
Szesnasty wiek przyniósł rozwiązanie w postaci dzwonu do nurkowania,
w którym powietrze było dostarczane z powierzchni. Było to pierwsze w miarę
efektywne rozwiązanie pozwalające na pozostanie pod wodą długi okres czasu.
Dzwon utrzymywany był w miejscu kilka stóp od powierzchni wody, jego dół
był otwarty, a górna część zawierała powietrze skompresowane przez ciśnienie
wody. Nurek mógł opuścić dzwon na minutę lub dwie a następnie wrócić na tak
długo jak długo wystarczało powietrza zgromadzonego w górnej części dzwonu.
4
W szesnastym wieku w Anglii i Francji skonstruowano kompletny
kombinezon nurka, wykonany ze skóry. Pozwalały one na zanurzenie nurka do
głębokości około dwudziestu metrów. Powietrze do kombinezonu dostarczane
było z powierzchni za pośrednictwem ręcznych pomp. Wkrótce hełmy zaczęto
wykonywać z metalu, żeby mogły wytrzymać większe ciśnienia. Pozwoliło to
nurkom schodzić coraz głębiej.
Wiek dziewiętnasty przynosi bardzo szybki rozwój nauki i technologii.
Konstrukcja pomp sprężonego powietrza, regulatorów, pozwalają na zanurzanie
człowieka na bardzo długie okresy czasu.

5
Kolejne lata przynoszą coraz większą wiedzę na temat zmian ciśnienia, a
także problemów związanych z chorobą dekompresyjną. W roku 1930 William
Beebe zanurza się na głębokość 1426 stóp (ok. 470 metrów) w kulistym
batyskafie o średnicy około czterech stóp i dziewięciu cali. Batyskaf ten był
połączony z barką znajdującą się na powierzchni za pomocą stalowej liny.
Cztery lata później ten sam człowiek w nowym batyskafie ustanawia nowy
rekord: 3028 stóp. Rekord ten pozostanie niepokonany przez następnych
czternaście lat. Jednak kombinezony do nurkowania w latach trzydziestych, były
bardzo nieporęczne, ciężkie. Wytrzymywały ciśnienie jednej atmosfery.
W roku 1960 ustanowiony zostaje rekord w głębokości zanurzenia
człowieka znajdującego się w maszynie. Batyskaf Trieste z dwiema osobami na
pokładzie: Jacque’em Picard’em i Don’em Walsh’em, schodzą na głębokość
10916 metrów, dokonują tego w najgłębszym miejscu na Ziemi – Rowie
Mariańskim. Rekord ten pozostanie niepokonany, chyba, że naukowcy odkryją
jakieś głębsze miejsce. Ciśnienie jakie zanotowano w czasie tego zanurzenia to
16883 PSI czyli 116,41 Mpa.

6
2. Niebezpieczeństwa czyhające na człowieka schodzącego pod wodę
Środowisko podwodne, nie jest środowiskiem przyjaznym człowiekowi.
Bez specjalnej aparatury, może przebywać pod wodą najwyżej kilka minut.
Wyposażenie nurka w odpowiedni kombinezon zdaje się rozwiązywać problem
oddychania, jednak oprócz braku możliwości oddychania, przy potrzebie zejścia
głębiej pojawia się problem ciśnienia, które rośnie bardzo szybko wraz ze
wzrostem głębokości (Każde 10,3 metra to jedna atmosfera więcej ciśnienia
oddziaływującego na zanurzany obiekt. Na głębokości 1000 m pod wodą panuje
ciśnienie 97 atmosfer, czyli siła ok. 983 ton na metr kwadratowy!). Ponadto
dodatkowymi zagrożeniami są temperatura, która maleje wraz ze wzrostem
głębokości, fauna (rekiny, meduzy), choroba dekompresyjna, której doświadcza
człowiek w przypadku zbyt szybkiego wynurzenia. Oczywistym kierunkiem
rozwoju nurkowania, wydaje się wykorzystanie robotów.

7
3. Początki robotów podwodnych
Pierwsze odnotowane i udane wykorzystanie robota miało miejsce w
latach sześćdziesiątych dwudziestego wieku u wybrzeży Hiszpanii. Robot
CURV został wykorzystany do odnalezienia i odzyskania zaginionej bomby
wodorowej. Ten protoplasta współczesnych robotów wykorzystywanych pod
wodą, był praktycznie tylko ramą z kilkoma silnikami i bardzo prostym
manipulatorem. Wkrótce potem ten sam robot przeprowadził spektakularną
operację ratunkową załogowej łodzi podwodnej uwięzionej na głębokości 485
metrów. Jasnym się okazało, że roboty podwodne na stałe znajdą swoje miejsce
przy pracach pod wodą.
Jednak dopiero lata osiemdziesiąte przyniosły prawdziwy rozwój robotów
podwodnych. Najbardziej znanym współczesnym sukcesem robotów
podwodnych, są zdjęcia wraku Titanica wykonane w roku 2004 przez robota
Hercules. Doskonała jakość obrazów przesłanych przez tego robota na
powierzchnię po raz kolejny potwierdziła użyteczność tego typu urządzeń.

8
4. Zastosowanie robotów pod wodą
Istnieje bardzo wiele zastosowań podwodnych dla robotów. Pierwszym z
przykładowych jest „tele-obecność”, czyli po prostu zadaniem robota jest
zapewnienie operatorowi wrażenia jakby był w miejscu w którym
przeprowadzone mają być dane działania. Zadanie to jest wypełniane przez
robota zwanego „okiem” – jest to proste urządzenie wyposażone w kamery. Na
chwilę obecną jedynym ograniczeniem w tej dziedzinie podwodnych działań,
jest dwuwymiarowość kamer działających pod wodą, jednak prowadzone są
badania nad połączeniem kamer z sonarem co mogłoby zapewnić głębię w
obserwowanym obrazie.
Osobną grupę podwodnych robotów tworzy tak zwana „klasa pracująca”.
Są to roboty które wypełniają takie zadania jak:
- wsparcie przy różnego rodzaju wierceniach
- oczyszczanie z gruzu podwodnych instalacji oraz ich inspekcja
- inspekcja podwodnych rurociągów
- inspekcja i utrzymanie tam i doków
- czyszczenie kadłubów okrętów bez konieczności wyciągania jednostki do
suchego doku
Inne zastosowania to:
- badanie naukowe i archeologia podwodna (odkrycie wraku Titanica)
- operacje antyterrorystyczne
- zastosowania militarne

9
5. Budowa robota podwodnego
Typowy przedstawiciel „klasy pracującej” składa się z ramy w której
osadzone są pompy hydrauliczne, silniki, czujniki oraz cały elektroniczny sprzęt
służący do kontrolowania robota. Wszystkie te elementy rozmieszczane są w
sposób zapewniający optymalny rozkład masy. Dodatkowo w górnych częściach
ramy montowane są dodatkowe elementy poprawiające jeszcze rozkład masy.
Na wyposażeniu robota znajduje się również odpowiednie ramię i manipulator.
Manipulator może występować w różnych odmianach w zależności od zadanie
jakie ma wykonać robot.

10
6. Przykładowe roboty podwodne wykorzystywane do ciężkich prac
podwodnych
CURV III
Pierwotnie maszyna ta przeznaczona była do działań na głębokościach nie
przekraczających ok. 3000 metrów. W roku 1973 została wykorzystana w akcji
ratunkowej batyskafu Pisces III który zatonął u wybrzeży Irlandii. Model ten
próbowano również wykorzystać w akcji odzyskania szczątków promu
Challenger, jednak okazało się, że jego parametry nie są wystarczające do
przeprowadzenia tej akcji (zbyt silne prądy występujące u wybrzeży Florydy
uniemożliwiły działanie tym robotom). To niepowodzenie doprowadziło do
skonstruowania nowego modelu CURV III. Parametry jakimi dysponuje ten
robot:
- Zanurzenie maksymalne wg producenta: 20.000 stóp.
- Największa osiągnięta głębokość: 20.501 stóp.
- Masa: ok. 6.500 kg.
- Moc: 80 KM .
- Telemetria: 60 Mbps + 4 kamery wideo
- Zasilanie: trójfazowe 2800V.
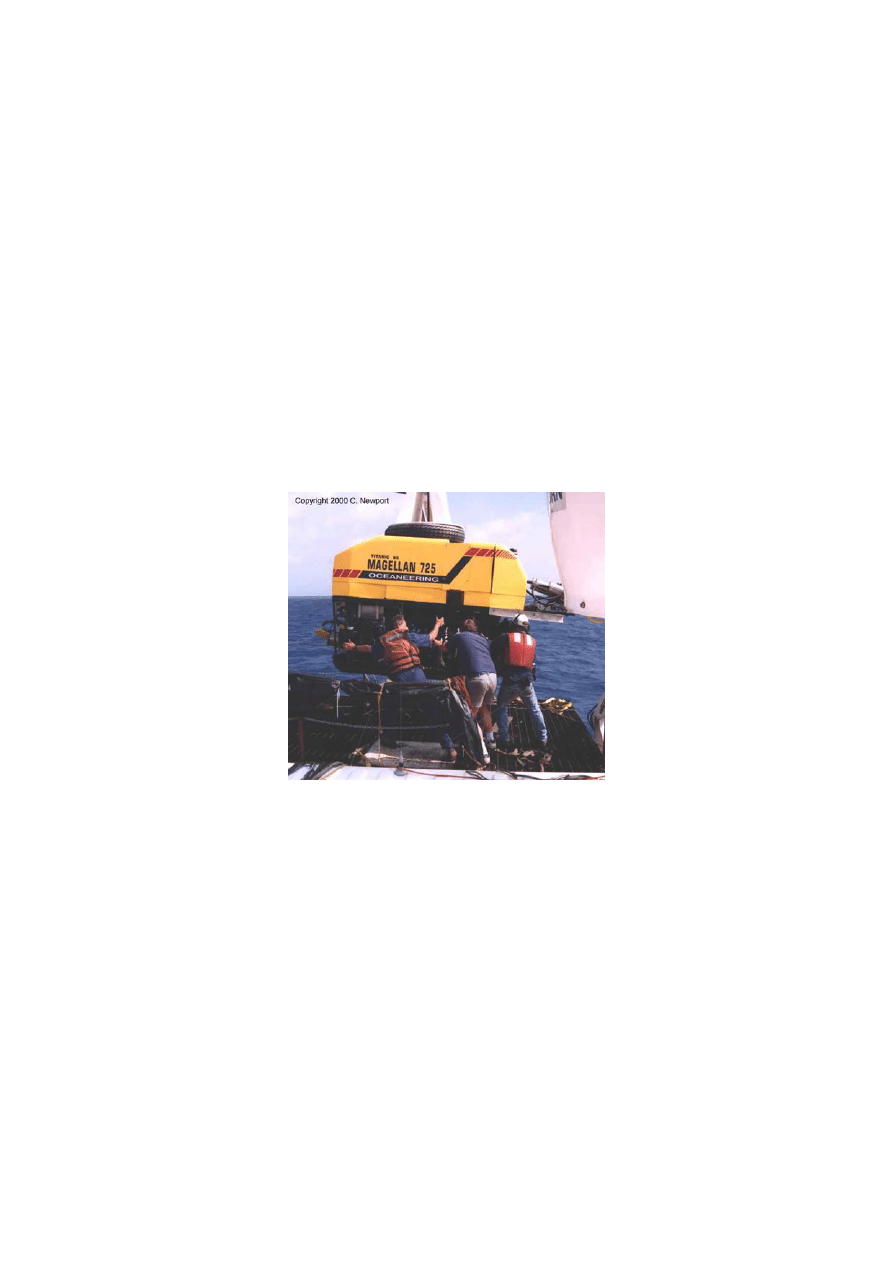
MAGELLAN 725
11
Robot ten jest używany razem z holowanym sonarem. Oba urządzenia
sterowane są z tego samego pulpitu i wykorzystują wspólny kabel do
komunikacji. Magellan wykorzystywany jest do przeprowadzania podwodnych
śledztw ubezpieczeniowych. Udaremnił próbę wyłudzenia ubezpieczenia za
ubezpieczony ładunek znajdujący się na statku, dostarczając dowodów na to, że
statek został zatopiony celowo.
- Zanurzenie maksymalne wg producenta: 23.000 stóp.
- Największa osiągnięta głębokość: 12.000 stóp.
- Masa: Nieznana
- Moc: 25 KM.
- Telemetria: 1 Mbps + 2 kamery wideo.
- Zasilanie: trójfazowe 220V.
12
7. Roboty wykorzystywane do przeprowadzania inspekcji podwodnych
Na całym świecie jest ponad 6000 platform wydobywających gaz i ropę.
Niektóre z tych platform działają już od ponad 20 lat, jednak nowe techniki
wydobycia powodują, że instalacje te muszą działać jeszcze wiele lat, pomimo
że ich projekt nie przewidywał tak długiego okresu działania. Z czasem na
metalowych konstrukcjach pojawiają się pęknięcia będące wynikiem zmęczenia
materiału. Bardzo ważne jest zatem aby wystarczająco wcześnie wykryć te
uszkodzenia i im zapobiegać. Do typowych zadań robotów, które wcześniej
wykonywali nurkowie, należą:
- Oczyszczanie spawów z porostów
- Inspekcja spawów z wykorzystaniem takich technik jak na przykład
Magnetyczna Inspekcja Cząsteczek
- Pomiar prądów podwodnych
- Pomiar grubości ścianek metalowych rur

13
8. Współczesne koncepcje robotów inspekcyjnych
W dziedzinie inspekcji robotów powstały ostatnio dwie koncepcje:
- ARM (Automated Remote Manipulation)
- REMO
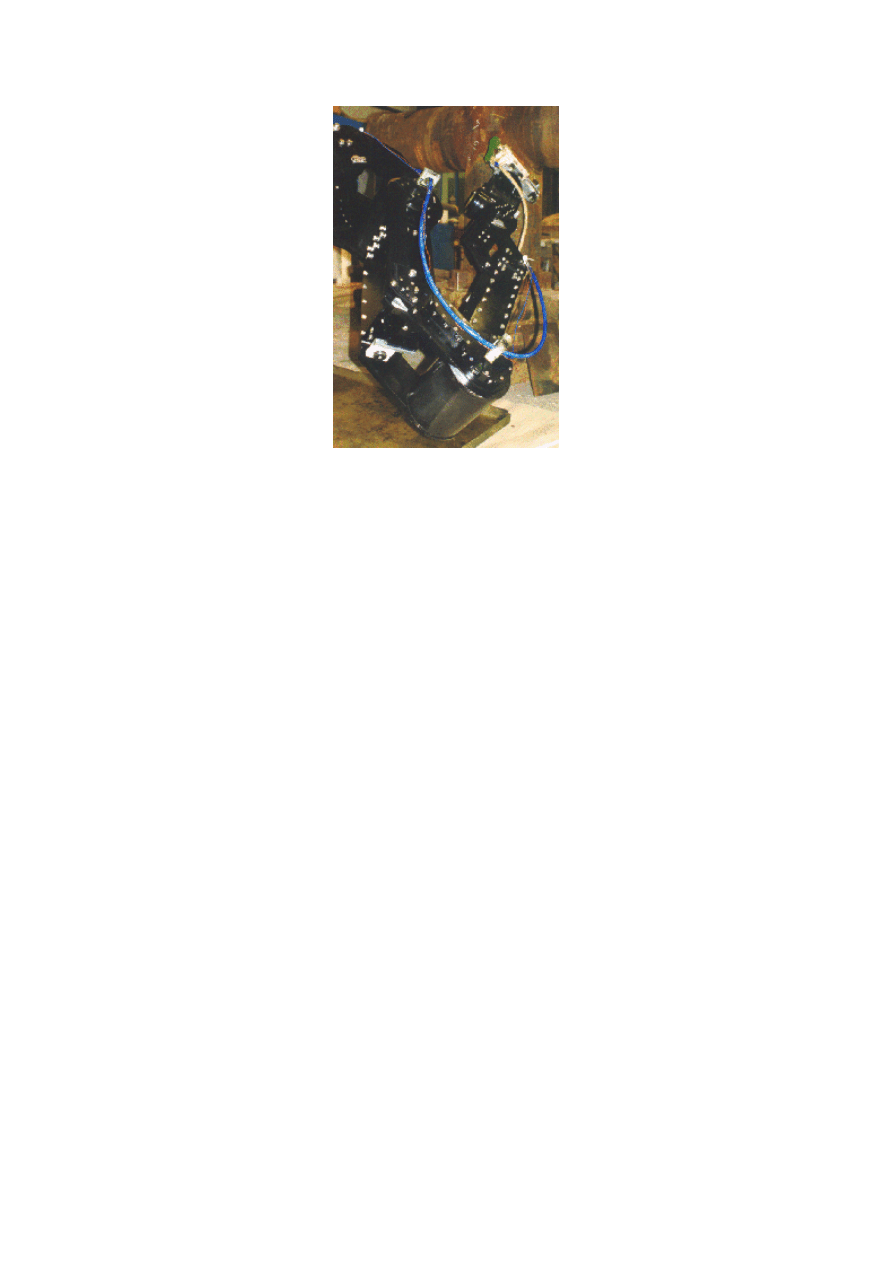
ARM
Jest to nowy system do podwodnego czyszczenia i inspekcji spawów. Składa się
on ze specjalnego manipulatora zamontowanego na wysięgniku umieszczonym
na standardowej ramie. Manipulator jest kontrolowany przez unikalny system
oparty na zwykłym komputerze klasy PC. Oprogramowanie zapewnia pełny
trójwymiarowy obraz położenia całego robota, manipulatora oraz miejsca pracy.
Ponadto zapewnia ręczne, pół – automatyczne oraz autonomiczne sterowanie
ramieniem robota z wykrywaniem kolizji. System ARM nowe czujniki i
narzędzia które pozwalają wyeliminować błędy pozycjonowania. Manipulator
systemu ARM jest jak na razie najbardziej zręcznym i zarazem największym
manipulatorem (mowa oczywiście o urządzeniach komercyjnych), ma on zasięg
2,5 m oraz zdolność udźwigu ok. 150 kg. Ramię składa się z sześciu członów
poruszanych hydraulicznie i pozwalających na obrót o 170 stopni wokół
każdego połączenia. W trakcie montażu ramie wyposażane jest w specjalne
znaczniki które w sposób bardzo znaczący ułatwiają kalibrację ramienia. Aby
umożliwić pełne wykorzystanie możliwości dość skomplikowanego
manipulatora jakim jest ARM, generowana jest komputerowa grafika
przedstawiająca robota, manipulator i miejsce pracy. Punkt widzenia może być
dowolnie zmieniany w celu ułatwienia pracy. Ramię może być kontrolowane
przez kilka urządzeń: mysz, joystick lub klawiaturę.
14
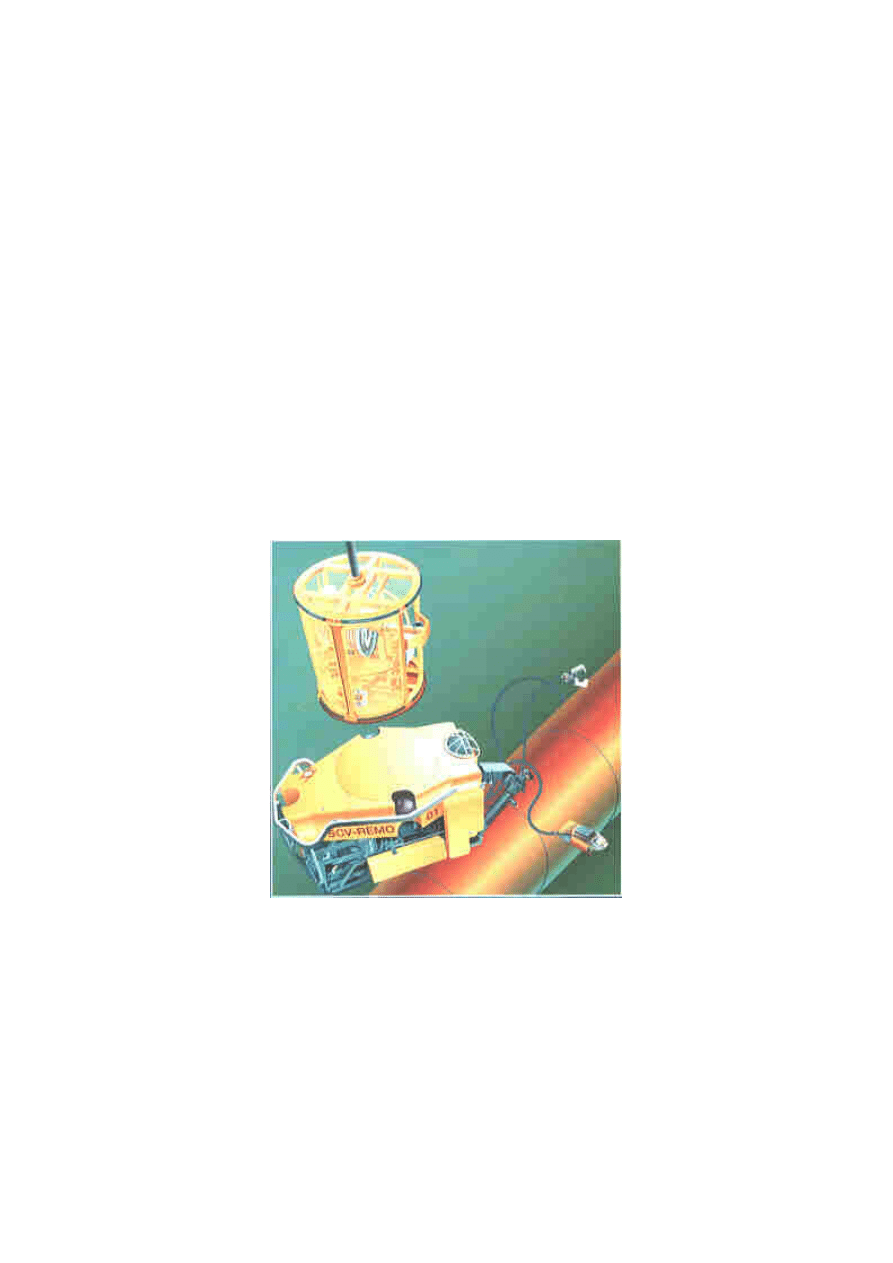
REMO
Pojazd ten jest przeznaczony do czyszczenia i inspekcji spawów w
skomplikowanych konstrukcjach stalowych. REMO połączony jest z
„Systemem Zarządzania Smyczą”. Po opuszczeniu do wody REMO oddziela się
od „smyczy” i przyczepia się do miejsca łączenia które ma zbadać.
Przyczepienie się jest realizowane za pomocą specjalnych przyssawek lub
pazurów, w zależności miejsca w którym REMO ma się przyczepić. Po
dokładnym przyczepieniu się, wykonywane jest zdjęcie miejsca pracy, na
podstawie którego budowany jest model trójwymiarowy, który służy do
zaplanowania pracy REMO zanim właściwe działanie się rozpoczyna. Następnie
dokonywany jest wybór odpowiedniego urządzenia, które zostanie
wykorzystane do czyszczenia spawu. Praca jest monitorowana za pomocą
kamer. REMO umożliwia dwa sposoby sprawdzania spawów.
Specyfikacja techniczna:
- Łącznie 7 kamer (min. kamera do dokowania, kolorowa kamera do
zbliżeń, 2 kamery do obserwowania środowiska pracy)
- Komputer Silicon Graphics wykorzystywana do kreowania
trójwymiarowych modeli środowiska pracy i obrazowania położenia
manipulatora
15
- 7-o funkcyjny manipulator zamontowany na obrotowej podstawie o
zakresie obrotu 170 stopni
- Specjalne manipulatory zakończone szczypcami lub przyssawkami
służące do dokowania
- Specjalistyczne narzędzia (min. sprzęt do badania pęknięć w spawach,
sonda do pomiaru grubości ścianek, sonda do mierzenia prądów
podwodnych, wiele innych)
- Szerokość – 218 cm
- Wysokość – 188 cm
- Długość – 346 cm
- Masa – 5.000 kg
- Prędkość maksymalna – 3 węzły

16
9. Przyszłość robotów podwodnych
Przyszłość podwodnych operacji leży w rękach, a raczej chwytakach
robotów. Ogromny rozwój tej dziedziny przemysłu, jaki miał miejsce w ciągu
ostatnich 25 lat, każe nam przypuszczać, że człowiek zostanie prawie całkowicie
zastąpiony przy pracach pod wodą. Pojawiają się pierwsze całkowicie
autonomiczne roboty, które z pełnym powodzeniem realizują powierzone im
zadania. Wojsko również prowadzi badania nad autonomicznym robotem, który
byłby zdolny do wykrywania i niszczenia min. Ogromnym polem do popisu dla
robotów autonomicznych są również pomiary gruntów na dużych
głębokościach, ponieważ koszty związane z przeprowadzeniem badań z
użyciem robotów połączonych ze statkiem za pomocą kabla, są ogromne.

17
Bibliografia
ROV robots:
http://www.rovworld.com/
Odkrycie Titanica:
http://www.nationalgeographic.com/channel/titanic/
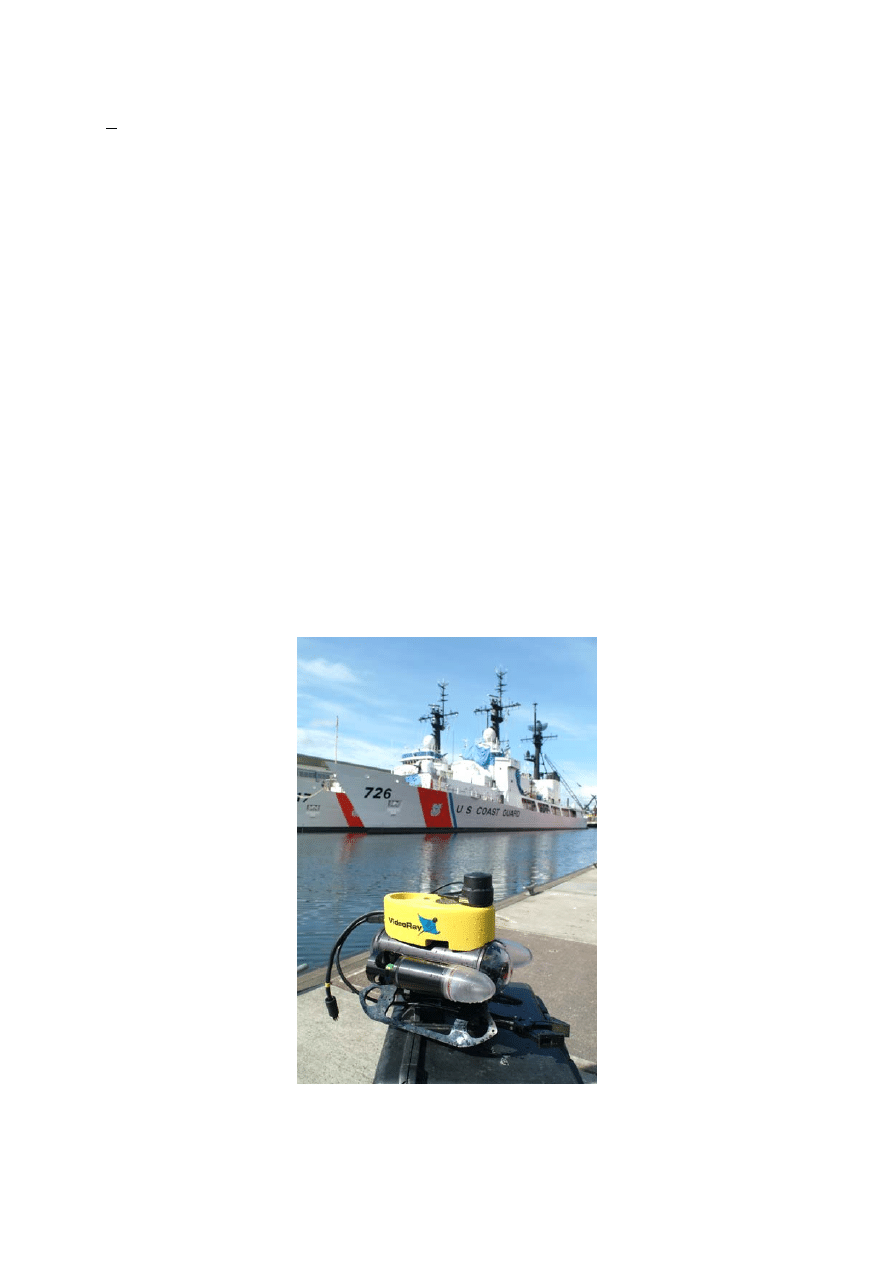
Roboty antyterrorystyczne:
http://www.videoray.com/
Przyszłość robotów podwodnych:
http://www.diveweb.com/rovs/features/mayjune2000.01.htm
Podwodne roboty inspekcyjne:
http://www.sut.org.uk/urghome/uirobs.html
Wyszukiwarka
Podobne podstrony:
PR ETI W 11 id 382128 Nieznany
Pr dom nr 14 RPiS id 382115 Nieznany
Fizjologia Cwiczenia 11 id 1743 Nieznany
Biologia Cwiczenia 11 id 87709 Nieznany (2)
piel 38 1 14 79 id 356923 Nieznany
PR ETI W 14 4 4
PR ETI W 14 6 1
moje wykresy 11 id 306777 Nieznany
G2 PB 02 B Rys 3 11 id 185401 Nieznany
III CZP 33 11 id 210275 Nieznany
mat bud cwicz 10 11 id 282450 Nieznany
grupa 11 id 441853 Nieznany
24 11 id 30514 Nieznany (2)
mnozenie do 25 11 id 304283 Nieznany
cwiczenie 11 id 125145 Nieznany
ort wiosna 11 id 340445 Nieznany
K 118 11 id 229276 Nieznany
Chemia 11 3 id 111768 Nieznany
cw2 11 id 123042 Nieznany
więcej podobnych podstron