
PODSTAWY ROBOTYKI
JW. 14.6.1
Robotyka w aeronautyce –
awionika i bezzałogowe
statki powietrzne
1. Krótka historia awioniki i latania
Awionika (z angielskiego avionics) jest połączeniem dwóch słów: awiacja i
elektronika. Najprościej mówiąc są to wszystkie wskaźniki, w które wyposażony jest samolot,
i które wspomagają pracę pilota. Kokpit współczesnej maszyny jest naszpikowany wręcz
elektroniką. Skąd potrzeba wykorzystania elektroniki w lotnictwie?? Podyktowana ona
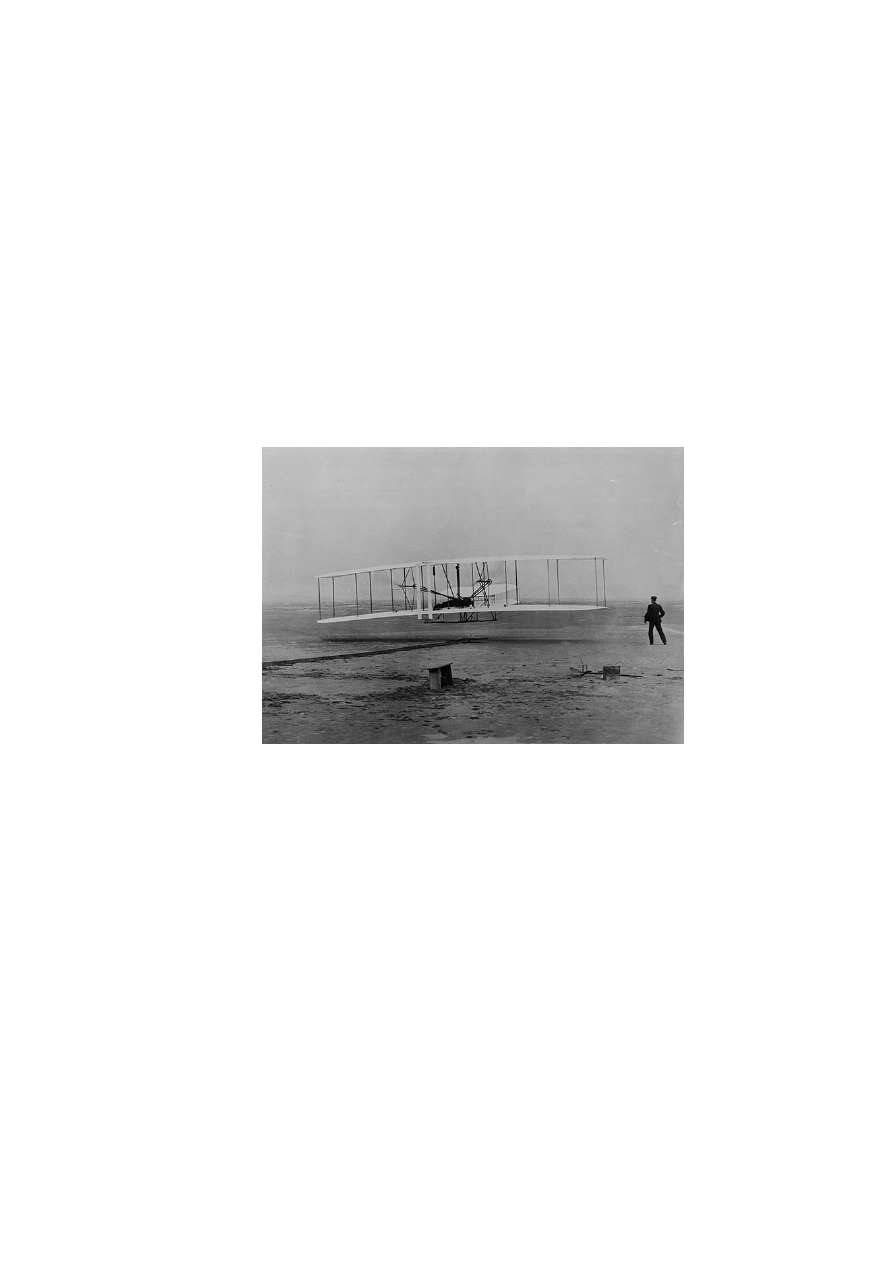
została bardzo gwałtownym rozwojem tej dziedziny. Flyer braci Wright był kierowany bez
użycia jakichkolwiek wskaźników, jedyne dane jakie miał dostępne pilot, uzyskiwane były
przez jego zmysły. Jednak wzrost prędkości i wysokości na jakich latały samoloty w
późniejszych latach, spowodował, że zmysły ludzkie przestały wystarczać do skutecznego
pilotowania coraz większych i cięższych samolotów.
Historyczny lot samolotu Flyer konstrukcji braci Wright
Pierwszy lot braci Wright (1903 rok) odbył się z prędkością 12 km/godz. Dziesięć lat
później (rok 1913) samoloty latały już prędkościami oscylującymi w okolicy 200 km/ godz.,
kolejne dziesięć lat powoduje wzrost prędkości maszyn o kolejne 100 km/ godz.. Najszybsze
samoloty sprzed Drugiej Wojny Światowej osiągają już prędkości zbliżone do 600 km/ godz..
Wojna stała się olbrzymią siłą napędową dla lotnictwa. Jest to czas w którym do użycia
wchodzą pierwsze radary, zastosowanie znajduje silnik odrzutowy, a także rozpoczyna się
gwałtowny rozwój elektroniki.
Kokpity samolotów drugiej dekady XX wieku wyposażone były w kilka
podstawowych wskaźników takich jak wysokościomierz, prędkościomierz, busola, itp.
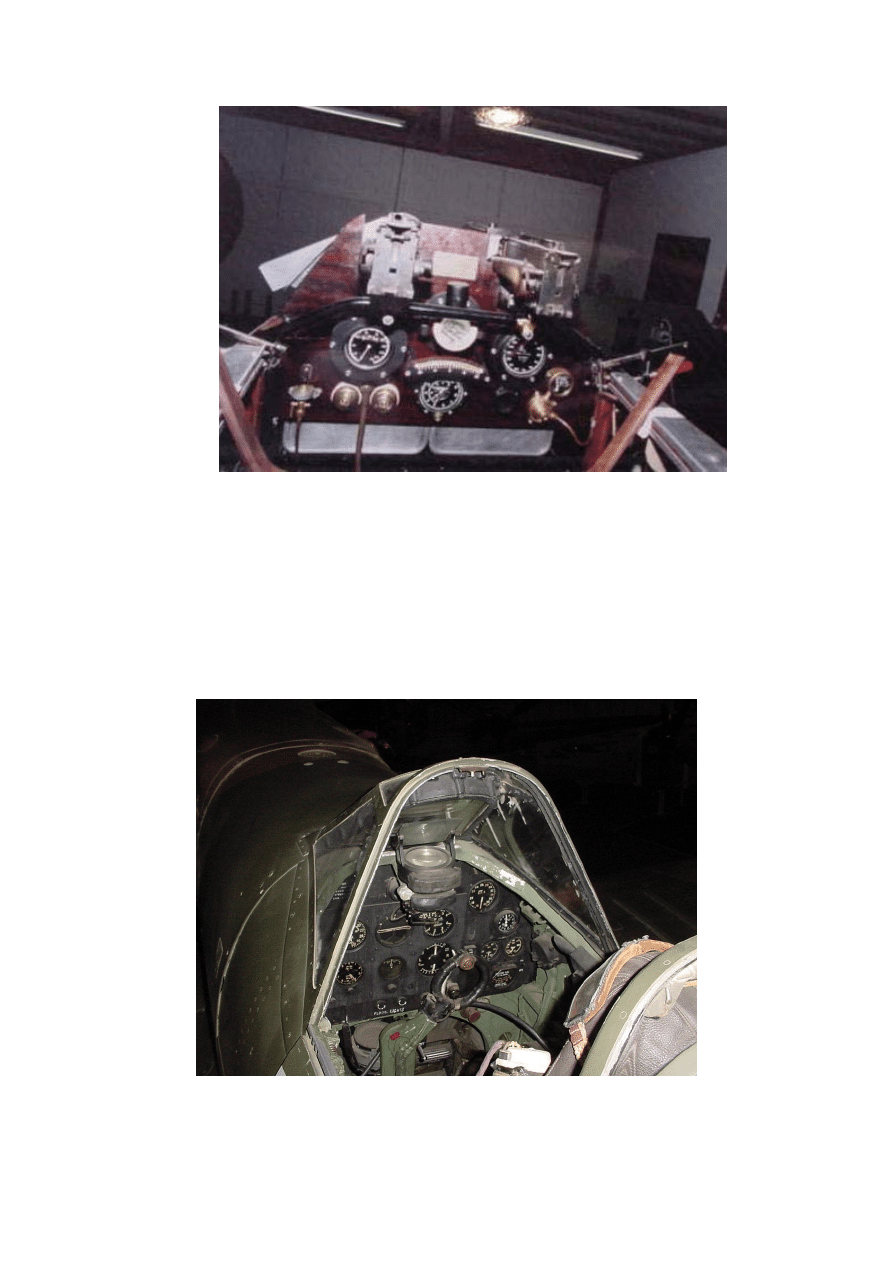
Kokpit samolotu Spowith Camel – konstrukcja z lat dwudziestych dwudziestego
wieku
Wraz z pojawieniem się konieczności latania w trudnych warunkach pogodowych
(noc, zachmurzenie, brak widoczności) wprowadzane były kolejne wskaźniki takie jak
sztuczny horyzont, zakrętomierz czy wariometr.
Kokpit Spitfire’a – najsłynniejszego samolotu Drugiej Wojny Światowej
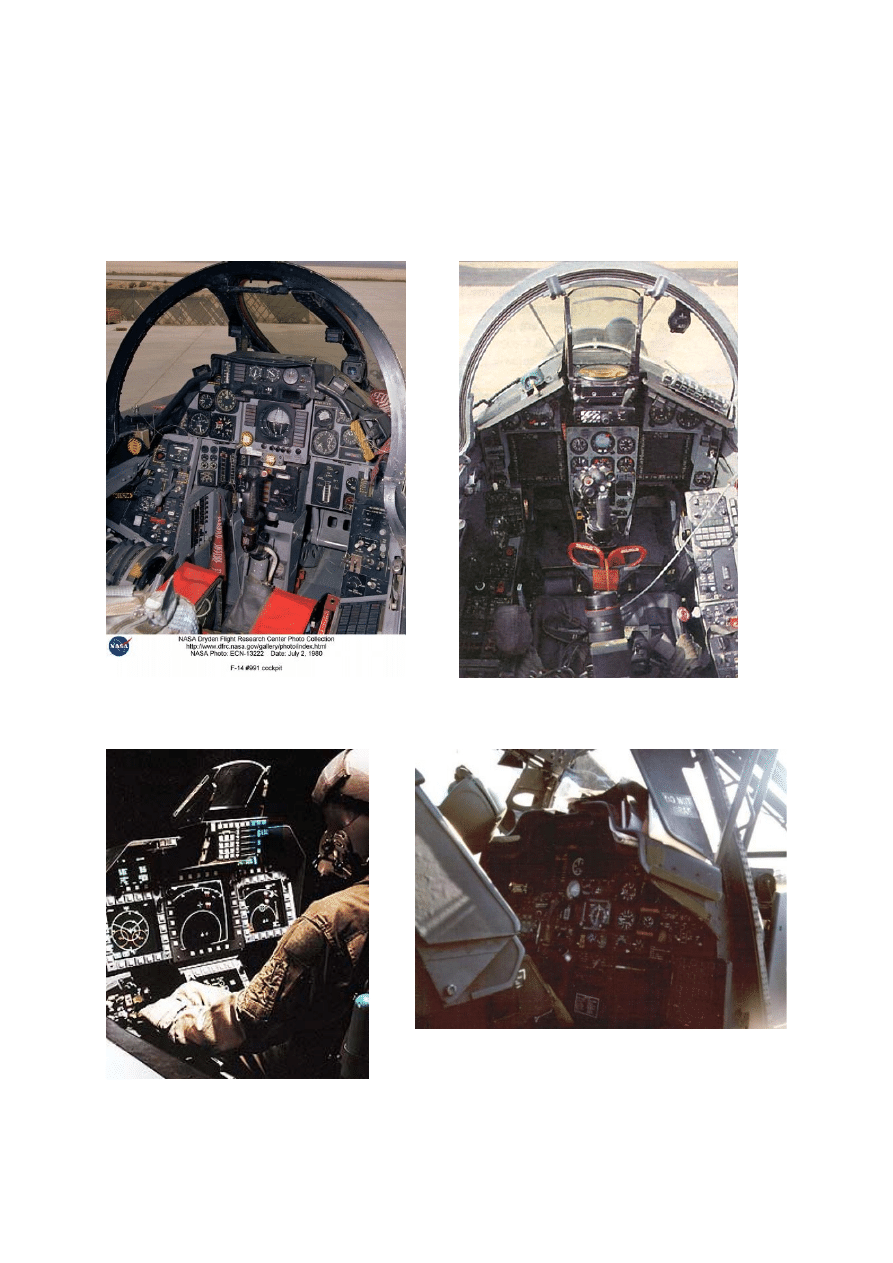
W kokpicie współczesnej maszyny znajdziemy obok podstawowych wskaźników
(prędkościomierz, wysokościomierz, zakrętomierz, sztuczny horyzont, wariometr) wiele
innych monitorujących pracę silników, obraz przekazywany przez radar, wskaźniki
informujące o uszkodzeniach, ilości paliwa a także wiele innych.
Kokpit maszyny z lat siedemdziesiątych
– F-14 Tomcat
Kokpit MIGa 29 – rosyjski odpowiednik F-14
Tomcat’a
Kokpit współczesnego samolotu F-22
Kokpit współczesnego śmigłowca AH-64 Apache
Liczba wskaźników w kokpicie (kabinie) zależy od typu samolotu. W szybowcu
znajdziemy tylko ułamek liczbyi wskaźników z Boeinga 747 czy innej maszyny pasażerskiej.
Również to czy maszyna jest cywilna czy wojskowa, ma olbrzymie znaczenie.
Kabina Boeinga 747
W jaki sposób działają podstawowe wskaźniki?
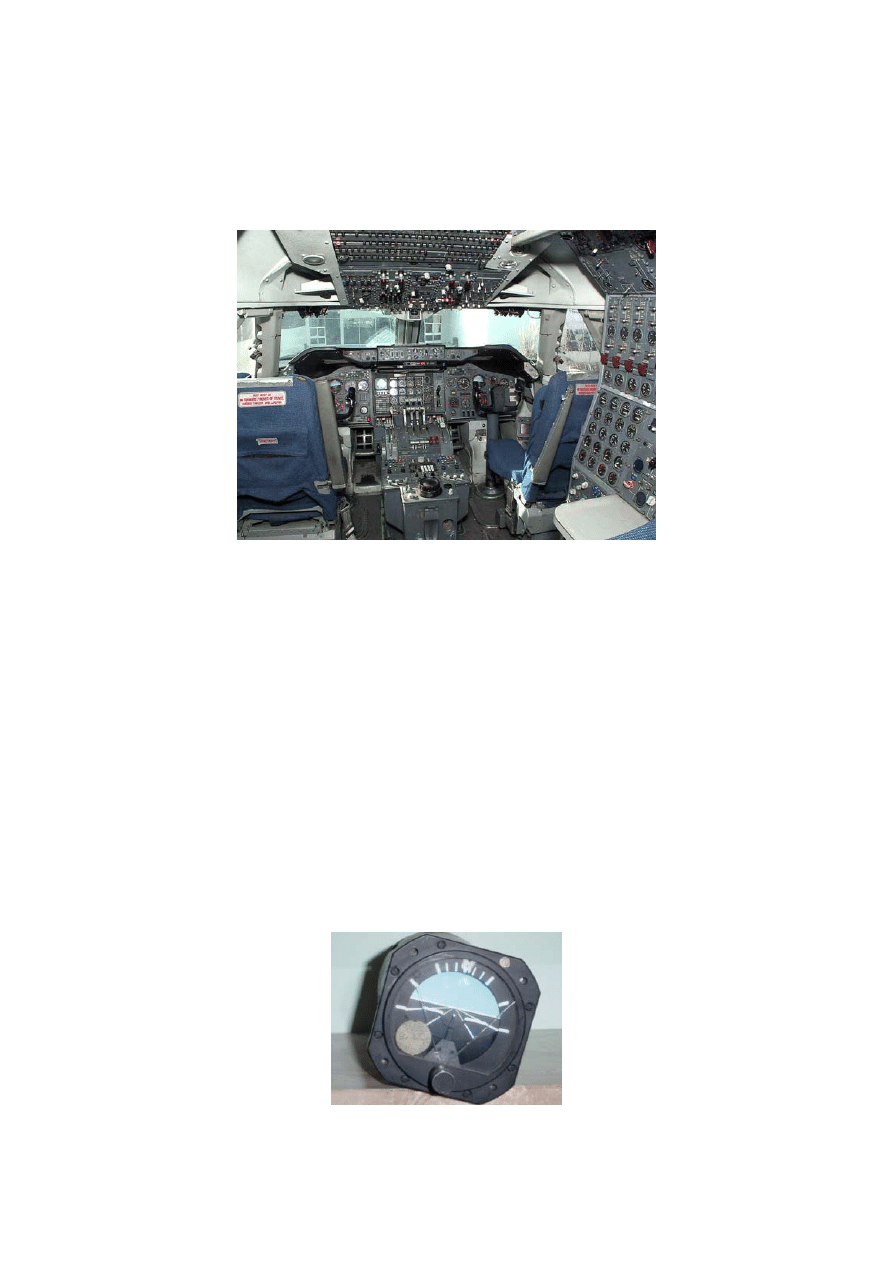
2. Sztuczny horyzont
Efekt giroskopowy jest różnie wykorzystywany w
urządzeniach. W
giroskopie
swobodnym wirujące koło jest odizolowane od samolotu przez zawieszenie Cardana. Gdy
samolot przechyla się, giroskop utrzymuje pionowy kierunek, dostarczając pilotowi
sztucznego horyzontu odniesienia. W przypadku kiedy pilot jest pozbawiony widoczności,
urządzenie to pozwala na stwierdzenie jak mocno przechylony jest w danym momencie
samolot.
Sztuczny horyzont
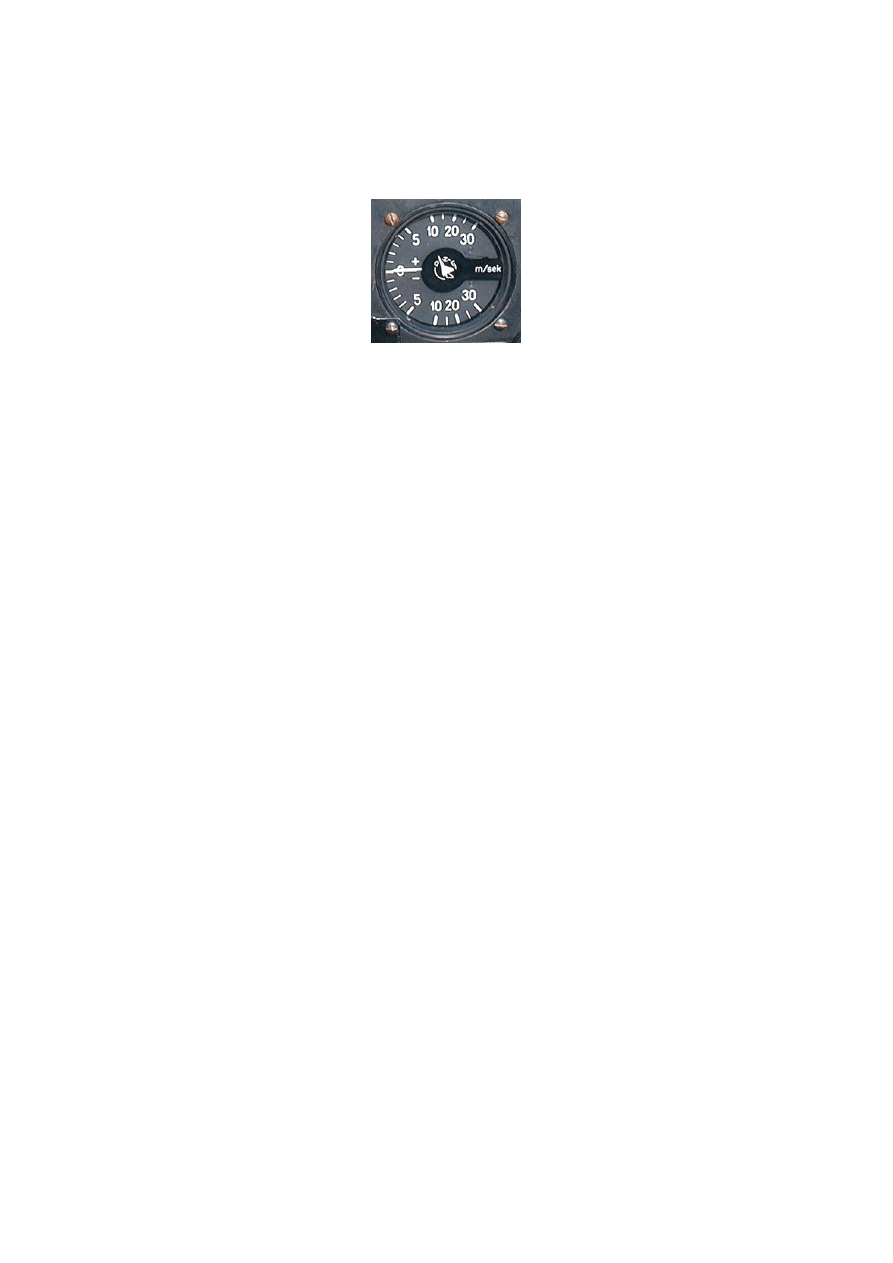
3. Zakrętomierz
Zakrętomierz jest przyrządem żyroskopowym pokazującym kierunek oraz prędkość
kątową zakrętu. (Żyroskop to „ciało sztywne obracające się z dużą prędkością kątową wokół
osi symetrii”.) W zakrętomierzu zastosowano żyroskop o dwóch stopniach swobody. Na osi
zainstalowanej w uchylnej ramce wiruje z prędkością rzędu 20 tysięcy obr./min napędzany
elektrycznym silniczkiem masywny krążek. Zmiana położenia osi głównej żyroskopu pod
wpływem momentu sił zewnętrznych (czyli zakręcania szybowca) wywołuje precesję -
powstanie momentu sił działającego wokół osi prostopadłej do osi wirowania krążka i osi
zakrętu. To z kolei powoduje proporcjonalne do prędkości kątowej zakrętu wychylenie
wspomnianej ramki w kierunku zależnym od kierunku wirowania krążka i kierunku zakrętu.
Po przejściu do lotu prostego precesja ustaje, a ramka wraca do położenia neutralnego za
sprawą dołączonych do niej sprężynek.
Zakrętomierz
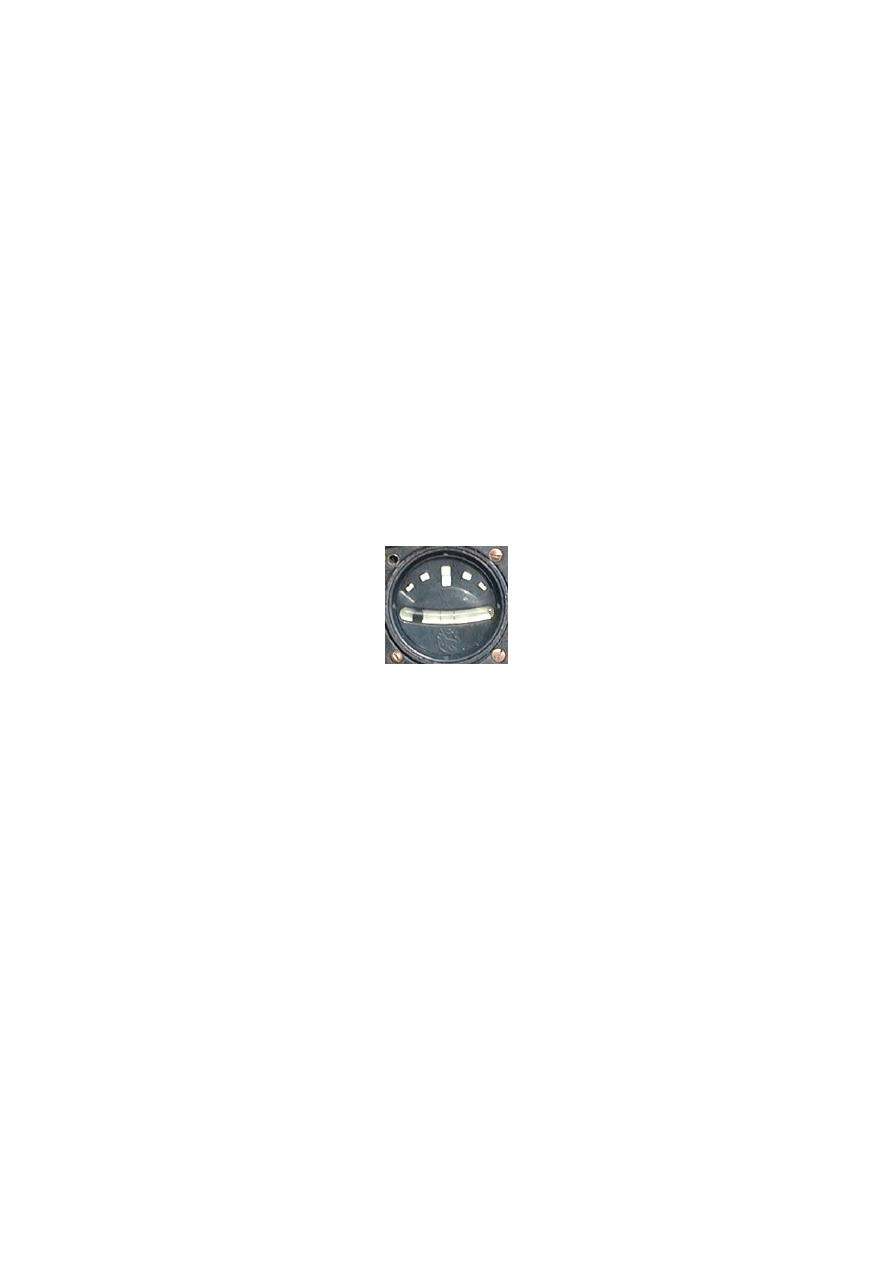
4. Wariometr
Wariometr jest przyrządem mierzącym prędkość pionową szybowca, czyli prędkość
wznoszenia lub opadania. Podobnie jak prędkościomierz, wariometr działa na zasadzie
pomiaru różnicy ciśnień. Główną częścią wariometru membranowego jest umieszczona
wewnątrz szczelnej obudowy puszka aneroidowa, do wnętrza której doprowadzone jest
ciśnienie statyczne. Puszka zaopatrzona jest w cieniutką rurkę włosowatą (kapilarę),
umożliwiającą powolny przepływ powietrza między jej wnętrzem a wnętrzem obudowy. Gdy
ciśnienie statyczne (i wysokość) jest stałe, ciśnienia na zewnątrz i wewnątrz puszki są równe -
wariometr wskazuje zero. Wznoszeniu szybowca towarzyszy spadek ciśnienia statycznego,
pojawiająca się różnica ciśnień powoduje deformację puszki i poruszenie wskazówki w górę.
W chwilę po ustaniu wznoszenia ciśnienia wewnątrz puszki i obudowy przyrządu wyrównują
się poprzez kapilarę i wskazówka wraca do położenia zerowego. Przy opadaniu ciśnienie
statyczne rośnie szybciej niż ciśnienie wewnątrz obudowy - mamy do czynienia z sytuacją
odwrotną i wskazówka opada.
Wariometr
5. Wysokościomierz
Zasada działania wysokościomierza jest dość prosta - w praktyce wysokościomierz
jest swego rodzaju barometrem. Podstawowym jego elementem jest tzw. puszka aneroidowa -
szczelnie zamknięte, elastyczne metalowe naczynie. Jak wiadomo, ciśnienie powietrza spada
wraz z wysokością. Im wyżej znajduje się szybowiec, tym większa różnica ciśnień pomiędzy
wnętrzem obudowy przyrządu (połączonym z dajnikami ciśnienia statycznego - maleńkimi
otworkami znajdującymi się na obu bokach kadłuba szybowca) a wnętrzem puszki. W wyniku
tego puszka rozszerza się i przez odpowiednią przekładnię popycha wskazówki przyrządu.
Wysokość lotu nie jest pojęciem jednoznacznym - trzeba jeszcze odpowiedzieć na pytanie:
wysokość w stosunku do czego? Dlatego też w lotnictwie określa się kilka rodzajów
wysokości. Najbardziej naturalne to wysokość względna, czyli po prostu odległość od
znajdującego się pod szybowcem podłoża. Inna wysokość względna (i ta nas najbardziej
interesuje), to wysokość mierzona względem ciśnienia lotniska, określana literami QFE. Tą
właśnie definicją wysokości posługują się statki powietrzne latające z widzialnością Ziemi (w
lotach VFR). Wysokość bezwzględna to wysokość mierzona w stosunku do aktualnie
panującego ciśnienia zredukowanego do poziomu morza (QNH). Wreszcie wysokość tzw.
standard (QNE) to wysokość mierzona w stosunku do ciśnienia atmosfery standardowej (czyli
do średniego ciśnienia na poziomie morza na 45 stopniu szerokości geograficznej przy 15
stopniach Celsjusza - 1013,2 hPa lub 760 mm Hg).
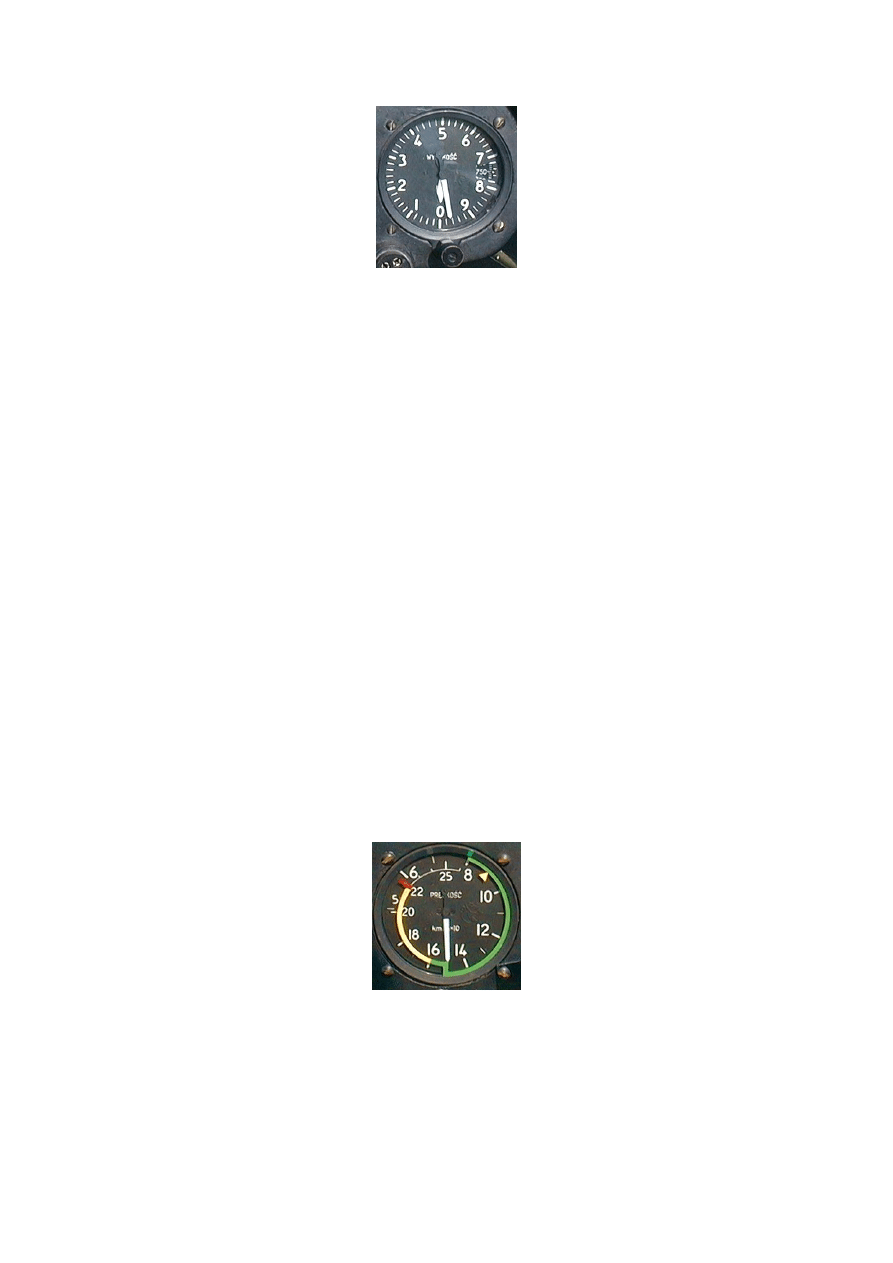
Wysokościomierz
6. Prędkościomierz
Tym, co najbardziej interesuje pilota, jest prędkość względem powietrza, gdyż to
właśnie ona decyduje o locie szybowca. Na szczęście tę właśnie prędkość stosunkowo łatwo
zmierzyć bez sięgania po wyrafinowane wynalazki najnowszej technologii, wykorzystując
fakt, że ciśnienie dynamiczne strumienia powietrza jest proporcjonalne do kwadratu jego
prędkości. W zasadzie wystarczyło by więc zastosować odpowiednio wyskalowany manometr
podłączony do skierowanej do przodu rurki. Problem jednak polega na tym, że mierzone w
ten sposób ciśnienie to ciśnienie całkowite, będące sumą ciśnienia dynamicznego i ciśnienia
statycznego, czyli ciśnienia atmosfery na danej wysokości. Wskazania przyrządu byłyby więc
silnie uzależnione od wysokości lotu. Aby otrzymać w miarę wiarygodny wynik pomiaru
ciśnienia dynamicznego, należy więc od ciśnienia całkowitego odjąć ciśnienie statyczne.
Ciśnienie całkowite doprowadzone jest do wnętrza puszki aneroidowej (podobnej jak w
wysokościomierzu), zaś ciśnienie statyczne - na zewnątrz puszki, do wnętrza obudowy
przyrządu. W ten sposób działające na puszkę siły wynikające z ciśnienia statycznego
równoważą się i deformacja puszki zależy tylko od ciśnienia dynamicznego.
Prędkościomierz
7. Osiągnięcia współczesnej awioniki
Do nowszych osiągnięć w dziedzinie awioniki należy na przykład system Fly By
Wire. System ten jest odejściem w pewnym stopniu od mechaniki i hydrauliki, wszelkie ruchy
na drążku są przetwarzane na sygnał elektryczny, nie ma tu już bezpośredniego połączenia za
pomocą cięgien, czy pomp hydraulicznych, ponad to jest to układ wspomagania decyzji
pilota, to znaczy każde podjęte działanie przez pilota jest analizowane przez komputery
pokładowe, minimalizując ryzyko wprowadzenia maszyny np. w korkociąg. Idea Fly By Wire
jest podobna do działania takich systemów jak ABS, EBD czy ASR w samochodach. Jednak
niektóre samoloty bez wspomagania komputerowego nie mogłyby być pilotowane przez
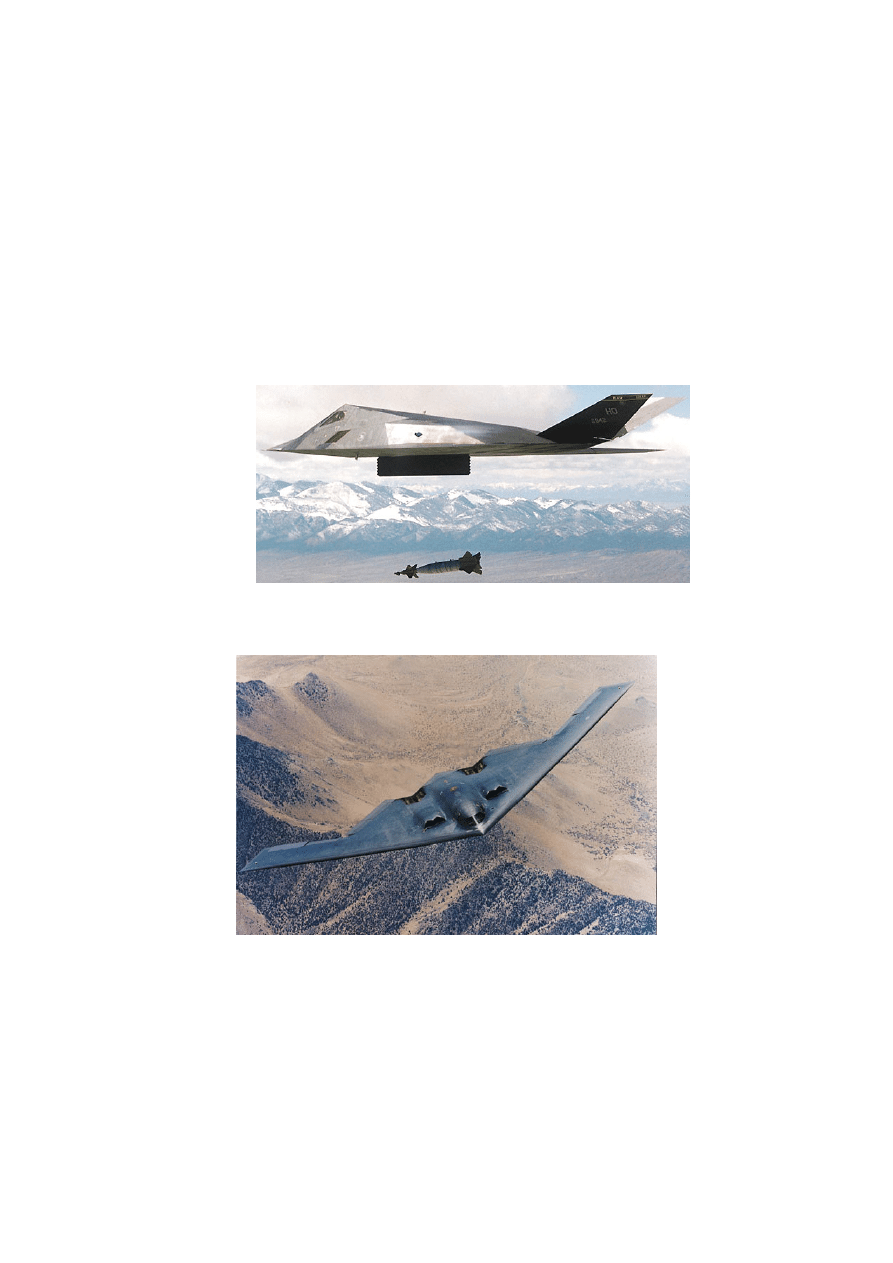
człowieka. Na przykład słynny F-117 Nighthawk, z racji swoich bardzo nieaerodynamicznych
kształtów wymaga stałego nadzoru komputerów.
F-117 Nighthawk – przykład maszyny która bez wspomagania nowoczesnej awioniki nie
nadawałaby się do pilotowania
Najdroższy samolot świata: B-2 Spirit. Maszyna ta bez komputerów wspomagających pracę
pilota byłaby najdroższą kupą złomu
Innym rozwiązaniem (które znajduje zastosowanie w samochodach) jest HUD (Head
Up Display) czyli po polsku wyświetlacz przeziernikowy. Najważniejsze wskazania
dotyczące parametrów lotu wyświetlane są na szybie przed pilotem. Takie rozwiązanie
pozwala na uzyskanie przez pilota informacji o samolocie, bez potrzeba przerywania
obserwacji otoczenia, jest to szczególnie ważne w przypadku samolotów wojskowych, gdzie
o losach misji decydują ułamki sekund.
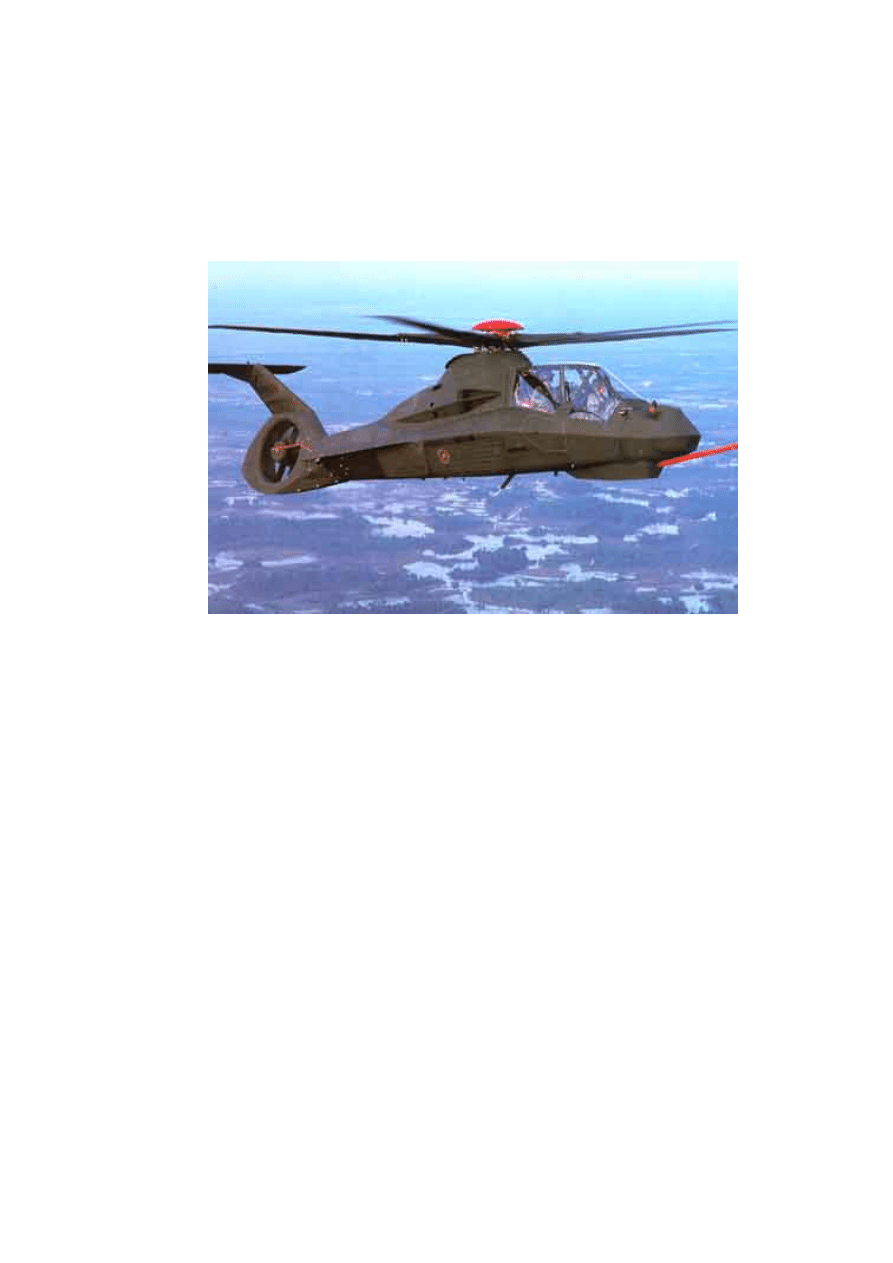
Doskonałym przykładem jak wiele możliwości oferuje współczesna awionika jest
śmigłowiec RAH-66 Comanche.
Nowoczesny śmigłowiec AH-66 Comanche jest doskonałym przykładem maszyny
wyposażonej w zaawansowaną awionikę
System sterowania tego śmigłowca umożliwia precyzyjny lot w każdych warunkach
pogodowych. Na stanowisku obu członków załogi znajdują się po dwa wyświetlacze
ciekłokrystaliczne dostarczające obraz z kamery termowizyjnej lub radaru, a także
umożliwiające wyświetlenie mapy terenu. Całkowita eliminacja klasycznych celowników
optycznych umożliwiła przeniesienie stanowiska operatora uzbrojenia do tyłu, co z kolei
zapewniło pilotowi dużo lepszą widoczność. Obrazy i symbole z systemu wykrywania celów
mogą być wyświetlane na wyświetlaczach przeziernych wewnątrz hełmów załogi. Ponadto
Comanche wyposażony jest w łącze umożliwiające wymianę danych pomiędzy śmigłowcami,
a co za tym idzie przeprowadzenia ataku, bez możliwości obserwowania celu.
Rozwój awioniki prowadzi w dość określonym kierunku. Można to łatwo zauważyć
porównując kokpit maszyny z lat siedemdziesiątych czy osiemdziesiątych z kokpitem
maszyny współczesnej. Widać od razu, że coraz większa ilość wskaźników jest zastępowana
wielofunkcyjnymi ekranami. Ta tendencja podyktowana jest koniecznością zapewnienia
pilotom jak najwyraźniejszego przeglądu sytuacji w każdej chwili lotu. Ponadto coraz więcej

funkcji pilota przejmują komputery, wynika to z prostego faktu, że komputer wykonuje wiele
czynności szybciej i lepiej.
X-31 doświadczalna maszyna o niesamowitych zdolnościach manewrowych
Prowadzi to do idei która powstała przed Drugą Wojną Światową, a której gwałtowny
rozwój obserwujemy dzisiaj.
8. Bezzałogowe statki powietrzne (BSP) - historia
Historia BSP rozpoczyna się w okresie międzywojennym kiedy to podjęto pierwsze
próby skonstruowania zdalnie sterowanych samolotów. Do tego celu wykorzystywano
normalne samoloty zwiadowcze, w których pilota zastępowano aparaturą sterowaną drogą
radiową. Niestety stosunkowy niski poziom rozwoju aparatury zdalnego kierowania,
spowodował, że próby te zakończyły się niepowodzeniem. Pierwszy BSP z prawdziwego
zdarzenia powstał w Niemczech pod koniec Drugiej Wojny Światowej. Został skonstruowany
na bazie pocisku manewrującego V-1, w którym głowicę bojową zastąpiono modułem z
kamerą do rozpoznania optycznego. Po zakończeniu Drugiej Wojny Światowej
zainteresowanie BSP opadło, co było związane z powstawaniem coraz większej ilości maszyn
których pułap i prędkość wykraczały poza możliwości przechwycenia. Nie było potrzeby
stosowania BSP skoro załogowe samoloty były praktycznie nieuchwytne, a co za tym idzie,
nie było większych problemów z przeprowadzeniem rozpoznania z dużych wysokości.
Sytuacja uległa zmianie pod koniec lat pięćdziesiątych. USA zaczęło budować pierwsze BSP
rozpoznania lotniczego, ich próby przeprowadzane były w Wietnamie. Sukcesywnie BSP
zastępowały tradycyjne załogowe samoloty w niebezpieczniejszych zadaniach
rozpoznawczych, co pozwoliło na dość znaczące obniżenie ilości strat poniesionych w
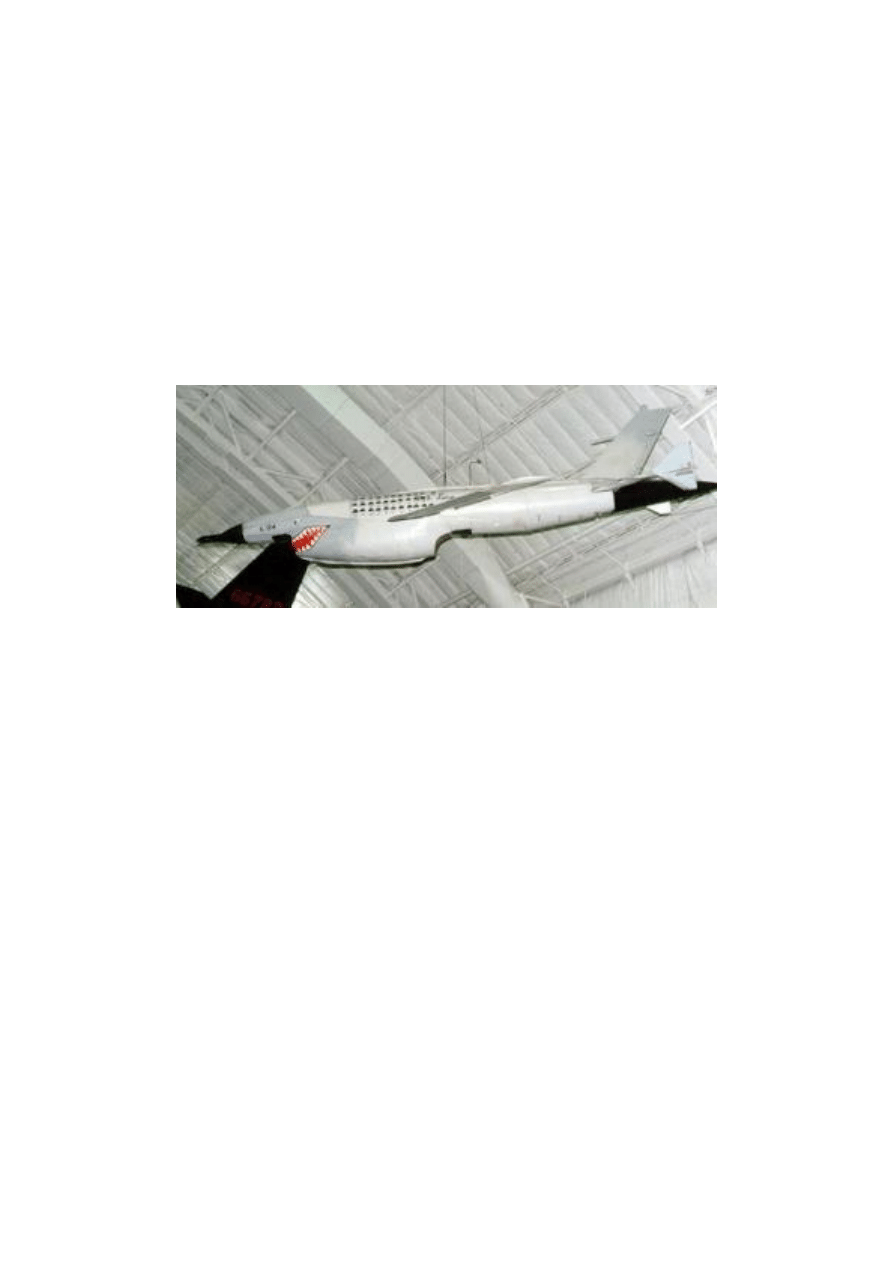
misjach rozpoznawczych. „Koniem roboczym” jak chodzi o bezzałogowe rozpoznanie był
Firebee.
Pierwszy BSP, który z powodzeniem spełniał zadanie rozpoznania na polu bitwy
Maszyna o rozpiętości skrzydeł 9 m a długości 4 m, była zdolna do przenoszenia dość
zaawansowanej aparatury fotograficznej. Firebee napędzany był silnikiem turboodrzutowym.
Start odbywał się spod skrzydła maszyny transportowej, następnie Firebee udawał się nad cel,
wykonywał zdjęcia i po oddaleniu się znad wrogiego terytorium otwierał spadochron
hamujący, i był przechwytywany w czasie opadania, przez specjalnie przystosowany
śmigłowiec.
Lata siedemdziesiąte przynoszą gwałtowny rozwój BSP na całym świecie. Produkcją
nowych rozwiązań w tej dziedzinie zajęły się nawet kraje, które nie dysponowały własnym
przemysłem lotniczym (Indonezja, Australia, Arabia Saudyjska). Konstrukcje osiągały coraz
większy stopień komplikacji i coraz większe zróżnicowanie. BSP do celów rozpoznawczych,
zaczęto przystosowywać do współdziałania z określonymi formacjami bojowymi – na
przykład artylerią. Coraz częściej wyposażano samoloty bezzałogowe w możliwość nie tylko
przeprowadzenia rozpoznania, ale również w możliwość wskazania konkretnego celu, przez
oświetlenie go wiązką lasera na przykład, co pozwalało na przeprowadzenie bardzo
dokładnego ataku z użyciem bomb lub rakiet kierowanych laserowo. Coraz większy nacisk

zaczęto stawiać na modułowość budowy BSP, co zapewniało duże łatwiejszą obsługę w
warunkach polowych. Ogromny rozwój technik fotograficznych pozwolił na przeprowadzanie
zwiadu z coraz większych odległości i przy trudnych warunkach pogodowych. Pojawiało się
również coraz więcej BSP, których celem było nie tylko rozpoznanie, ale także
przeprowadzanie ataków.
Do jednych z najbardziej popularnych BSP lat osiemdziesiątych należały SCOUT i
MASTIFF, obie te konstrukcje są pochodzenia izraelskiego i powstały na początku lat
osiemdziesiątych.
Scout
Mastiff
Maszyny te są dość podobne jak chodzi o gabaryty i osiągi
Mastiff
Scout
Rozpiętość [m]
4,25
4,96
Długość [m]
3,3
3,68
Maksymalna masa ładunku
[kg]
37 38
Prędkość maksymalna
[km/godz.]
185 176
Długotrwałość lotu [godz.]
7,5
7
Promień działania [km]
50
50
9. Współczesny BSP - Predator
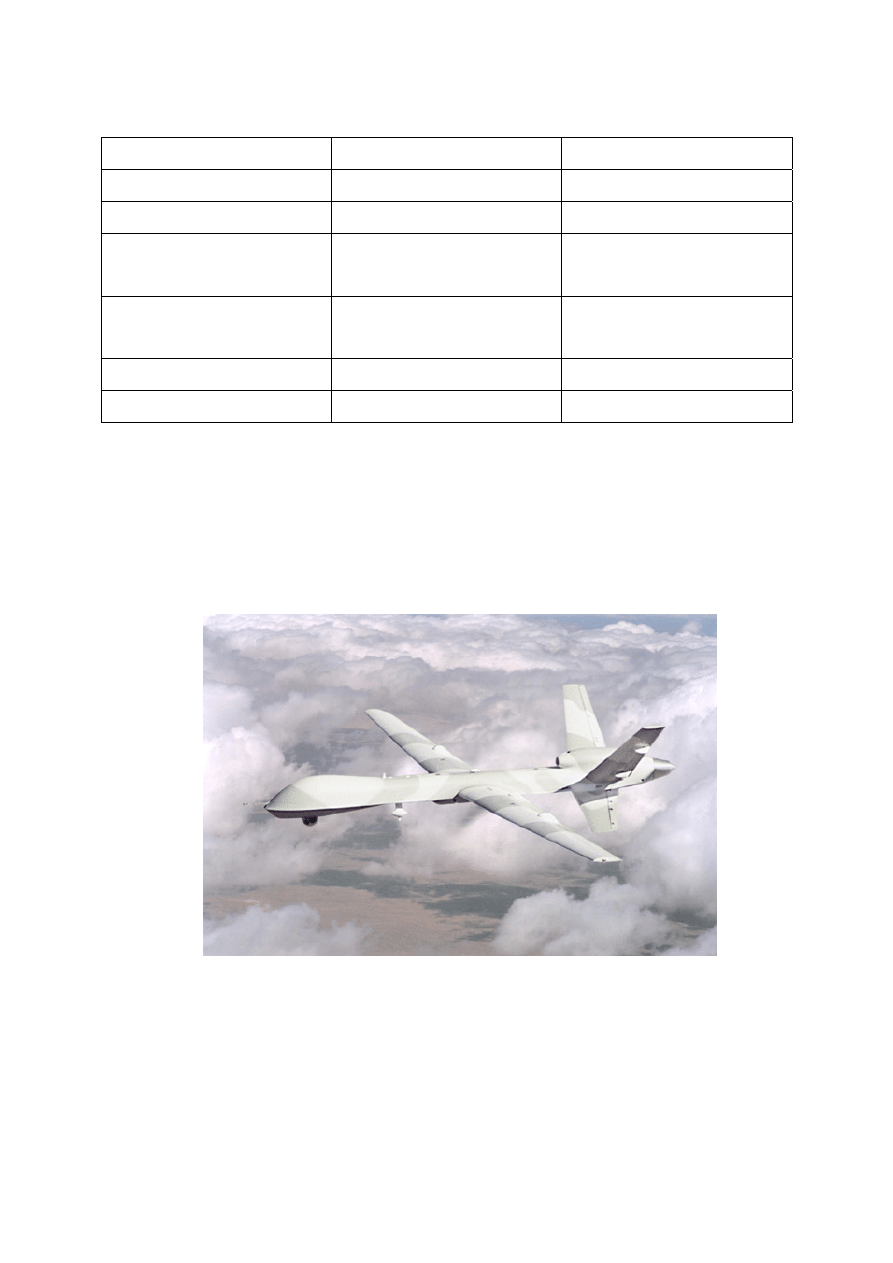
Natomiast najpowszechniejszym i odnoszącym największe sukcesy bezzałogowym
samolotem jest bez wątpienia PREDATOR.
Predator – współczesny BSP wykorzystywany do rozpoznania i wskazywania celów
dla artylerii, jednak jego możliwości są dużo większe...
Konstrukcja to rodem z USA powstała na początku lat dziewięćdziesiątych. Predator
po raz pierwszy w warunkach bojowych wykorzystany został w połowie lat
dziewięćdziesiątych w konflikcie bałkańskim. Maszyna ta wyposażona jest w specjalistyczną
aparaturę rozpoznawczą oraz ruchomą głowicę elektrooptyczną umożliwiającą pomiar
odległości oraz wskazywanie celów z wykorzystaniem lasera. Przekaz informacji odbywa się
w czasie rzeczywistym z użyciem łącza satelitarnego. Do nawigacji wykorzystany jest układ
bezwładnościowy korygowany odbiornikiem GPS. Predator może operować na pułapie do
8000 m. Prędkość maksymalna to ok. 200 km/godz., zasięg maksymalny 3700 km,
długotrwałość lotu to ok. 40 godzin. Powiada się, że Predator może odczytać ok. 5 calową
literę z odległości ok. 10000 stóp. Predatora można także wyposażyć w szereg środków
bojowych takich jak rakiety powietrze - powietrze, rakiety powietrze – ziemia, czy bomby
kierowane laserowo. Dodatkowo Predator jest przydatny do wielu zadań cywilnych takich jak
na przykład:
- koordynacja i ocena sytuacji na głównych szlakach komunikacyjnych
- monitorowanie obszarów leśnych i obszarów klęsk żywiołowych
- wsparcie informacyjne i kierowanie grupami antyterrorystycznymi
- rozpoznanie skażeń powstałych w wyniku awarii w zakładach przemysłowych
- tworzenie map
- wiele innych
Komunikacja z bezzałogowymi samolotami odbywa się drogą radiową. BSP odbywają loty
po zaprogramowanych trasach. Operator naziemny wprowadza komendy właściwie jedynie
podczas startu, lądowania, lub gdy na trasie przelotu pojawiają się jakieś przeszkody.
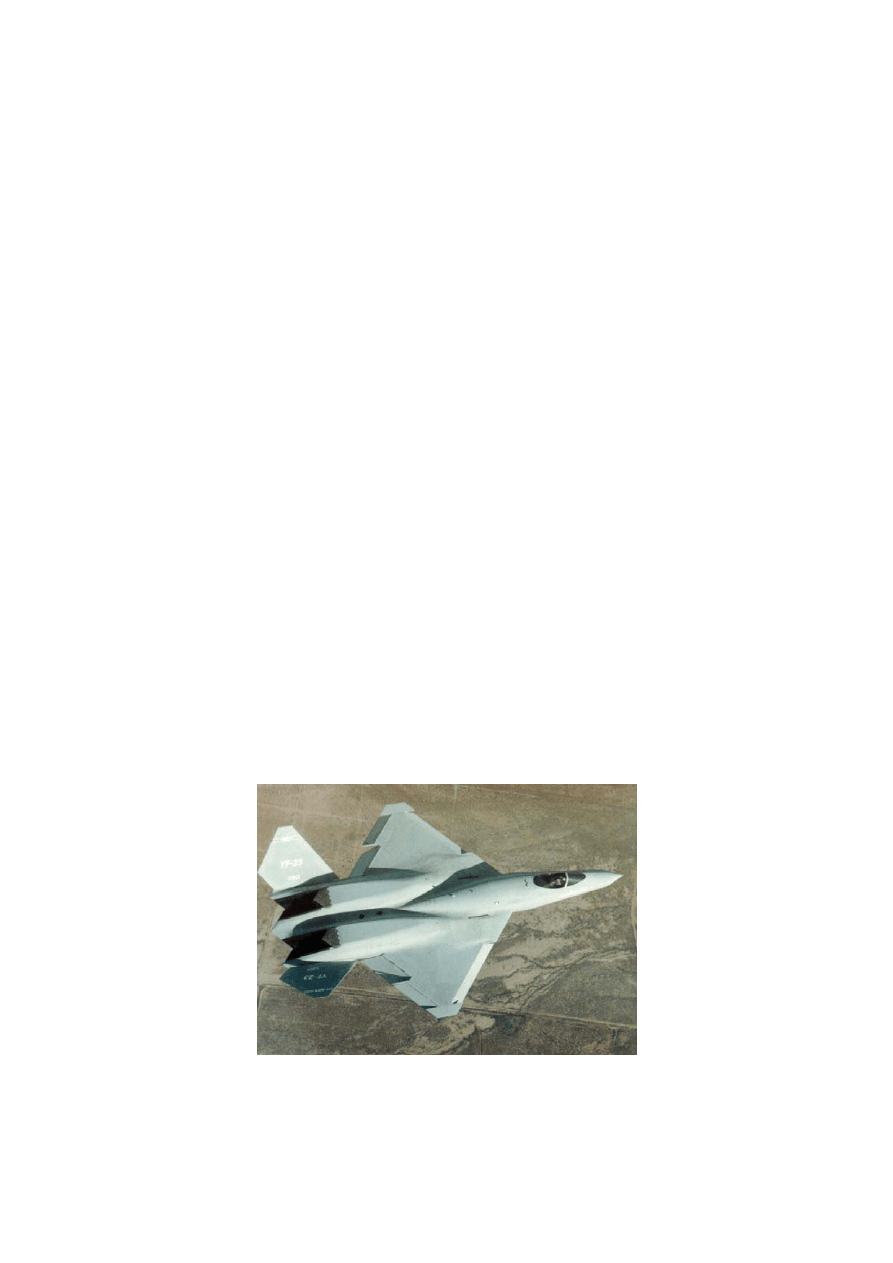
10. Przyszłość awioniki
YF-23 Black Widow
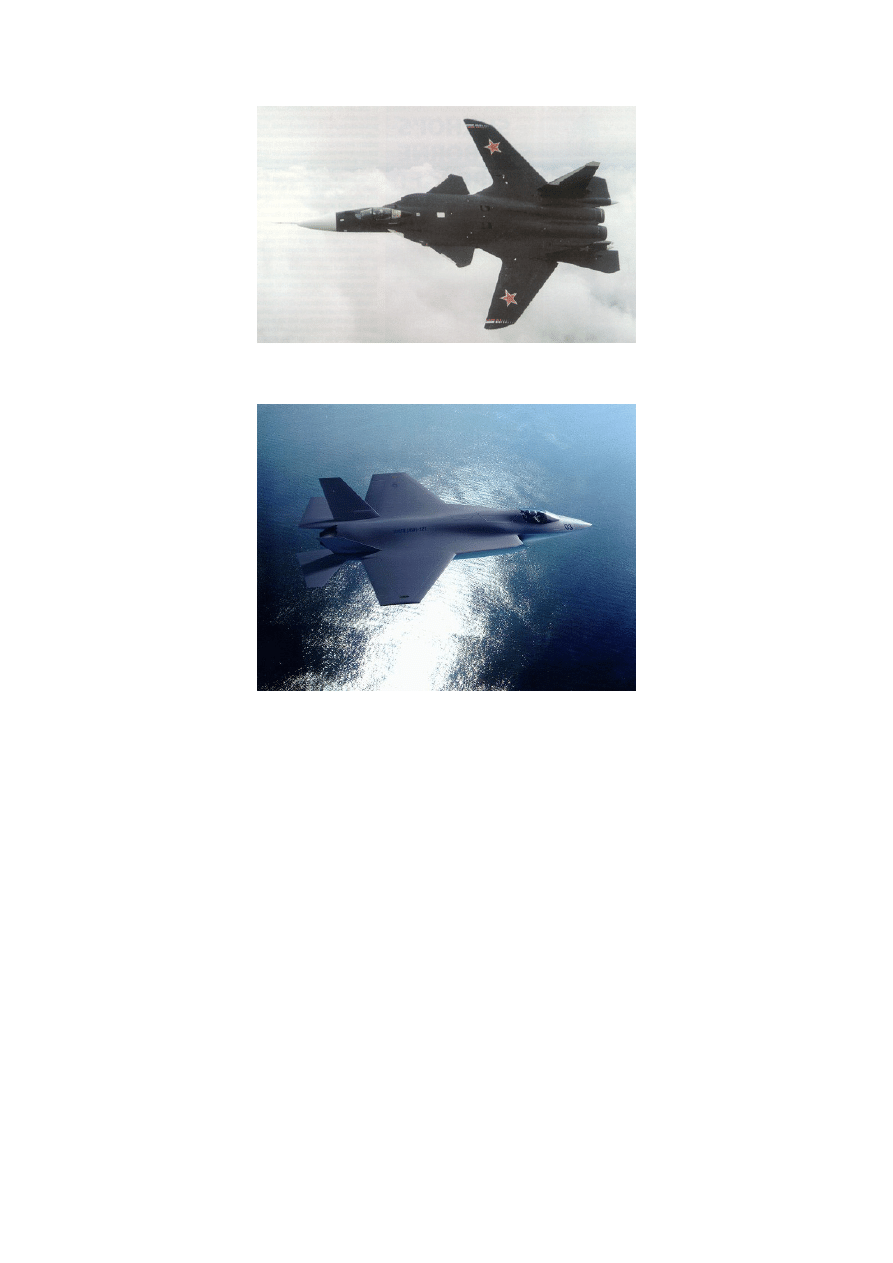
SU-37 Berkut
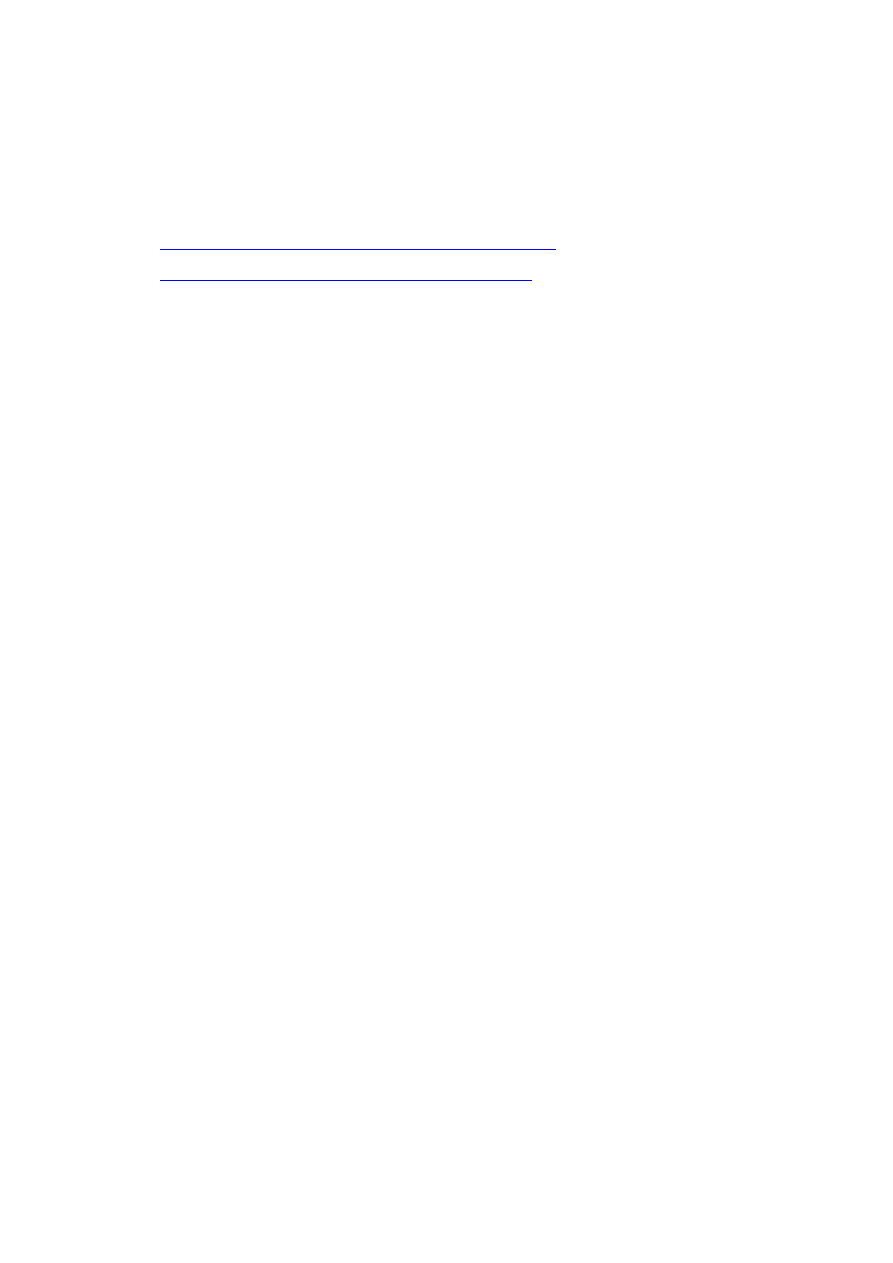
JSF – Joint Strike Fighter
Siły zbrojne przeznaczają coraz większe kwoty na badania i konstruowanie nowych
bezzałogowych samolotów. To ogromne zainteresowanie tą dziedziną wiedzy, związane jest z
rozwojem lotnictwa. Już w tej chwili testowane są konstrukcje, w których to pilot jest
ograniczeniem dla maszyny. Najlepsi piloci z wykorzystaniem najnowocześniejszych
kombinezonów, są w stanie znieść przeciążenia 12-14 g. Najnowsze maszyny są w stanie
wykonywać manewry, w których przeciążenia przekraczają 20 g. Ponadto po co ryzykować
życie pilotów do zadań, które z powodzeniem mogą wykonać BSP. Bardzo ważnym (o ile nie
najważniejszym) czynnikiem są również względy ekonomiczne. Bezzałogowe samoloty są
wielokrotnie tańsze od ich tradycyjnych odpowiedników.
Bibliografia
1. Nowa Technika Wojskowa 6/95, 3/93, 9/04
2. Raport 10/2004
3.
http://www.szybowce.enter.net.pl/instrum/instrum.htm
4.
http://www.aviation.home.pl/newbie/flightinst.html
Wyszukiwarka
Podobne podstrony:
PR ETI W 14 4 4
PR ETI W 14 3 1
PR ETI W 14 8 1
PR ETI W 14 5 1
PR ETI W 14 2 1
PR ETI W 14 11 1 id 382129 Nieznany
PR ETI W 14 12 1
PR ETI W 14 4 4
PR ETI W 3 4 3 5
PR ETI W 2
PR ETI W 1 4
PR ETI W 1 3
PR ETI W 1 3
PR ETI W 21 1
PR ETI W 25 6
PR ETI W 22 1
serwis pr, ETI SUM, sem 1
więcej podobnych podstron