
1
PODSTAWY ROBOTYKI
JW 1.4
2
Wstęp do teorii maszyn i mechanizmów – czyli jak to drzewiej bywało
Teoria maszyn i mechanizmów (skrót: TMM) jest działem nauki, który zajmuje się
badaniami teoretycznymi i doświadczalnymi nad geometrią, ruchem, dynamiką i sterowaniem
maszyn i układów maszyn, mechanizmów i elementów oraz ich zastosowaniami w przemyśle
i innych działach, np. biomechanice, z uwzględnieniem procesów konwersji i przemian
energii, a także informacji.
Współczesna TMM rozpatruje więc różne aspekty teorii i zastosowań mechanizmów i
maszyn, związanych z ich mechaniką, projektowaniem, syntezą, konstrukcją i miernictwem.
W tym wykładzie ograniczono się do omówienia zagadnień związanych z problematyką
mechanizmów i manipulatorów.
Historia rozwoju mechanizmów i maszyn wskazuje na nierozerwalny związek
współcześnie stosowanych mechanizmów z mechanizmami znanymi już w czasach
starożytnych i średniowiecznych. I tak stosowane na początku historii ludzkości narzędzie
kamienne uniwersalne w kształcie migdała, tzw. pięściok - znany dziś jako klin - było
pierwszym mechanicznym urządzeniem realizującym ruch postępowy. Nóż, piła, skrobak,
pilnik, topór i wszystkie możliwe rodzaje noży są tylko różnymi modyfikacjami klina. Na
jego bazie nastąpił rozwój połączeń-zamków, jak np. koła zaklinowanego na wale, połączenia
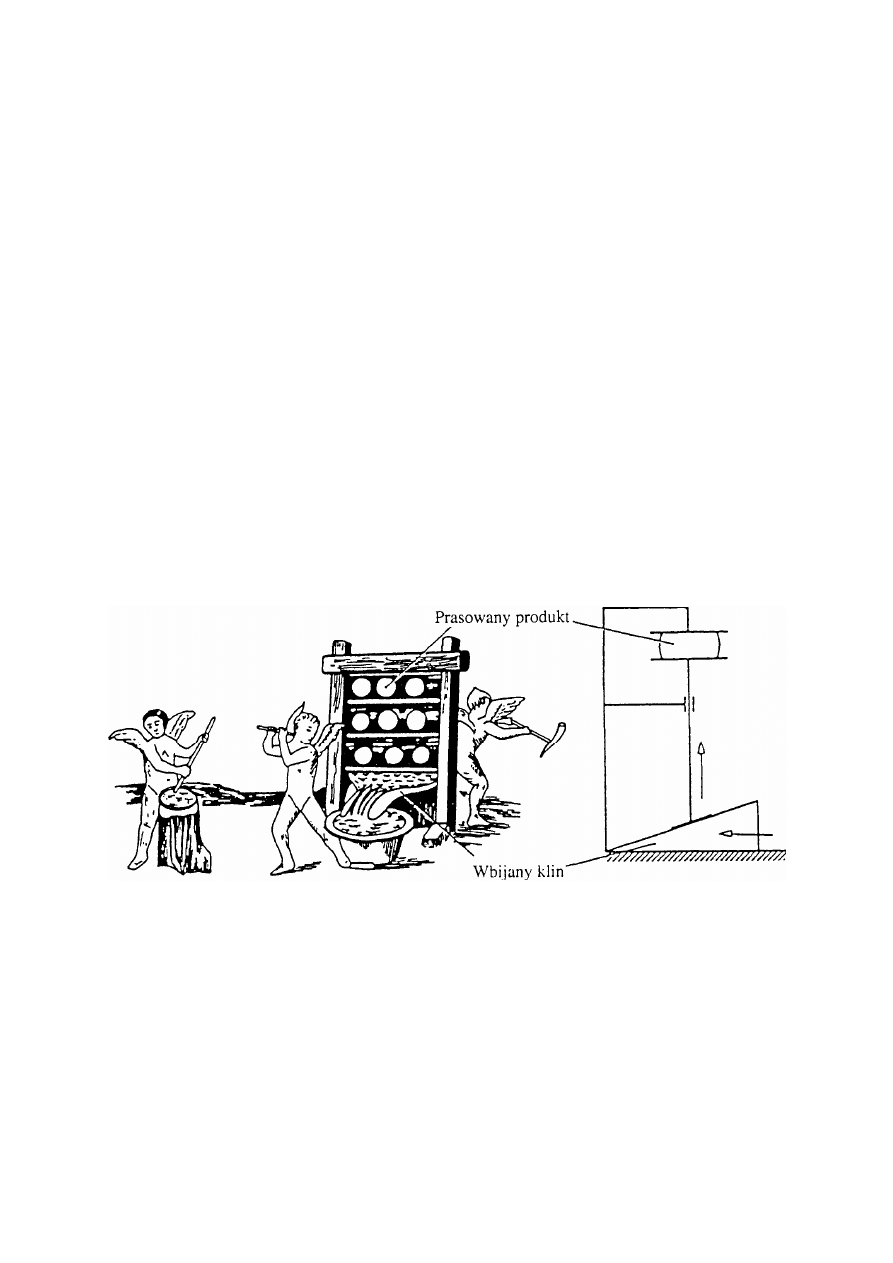
wpustowego, zębów kół zębatych itp. Z innymi członami o ruchu postępowym klin wystąpił
także w charakterze elementu przekazującego ruch prostoliniowy między dwiema
płaszczyznami. Przykład stanowi starożytna prasa klinowa przedstawiona na rys. 1. Taki był
początek współczesnej pary kinematycznej postępowej.
Rys. 1. Starożytna prasa klinowa
Stosując w czasach prehistorycznych maczugę, człowiek odkrył znaczenie ruchu
obrotowego, silnie zwiększonego dzięki przedłużeniu maczugą ramienia dźwigni, ręki.
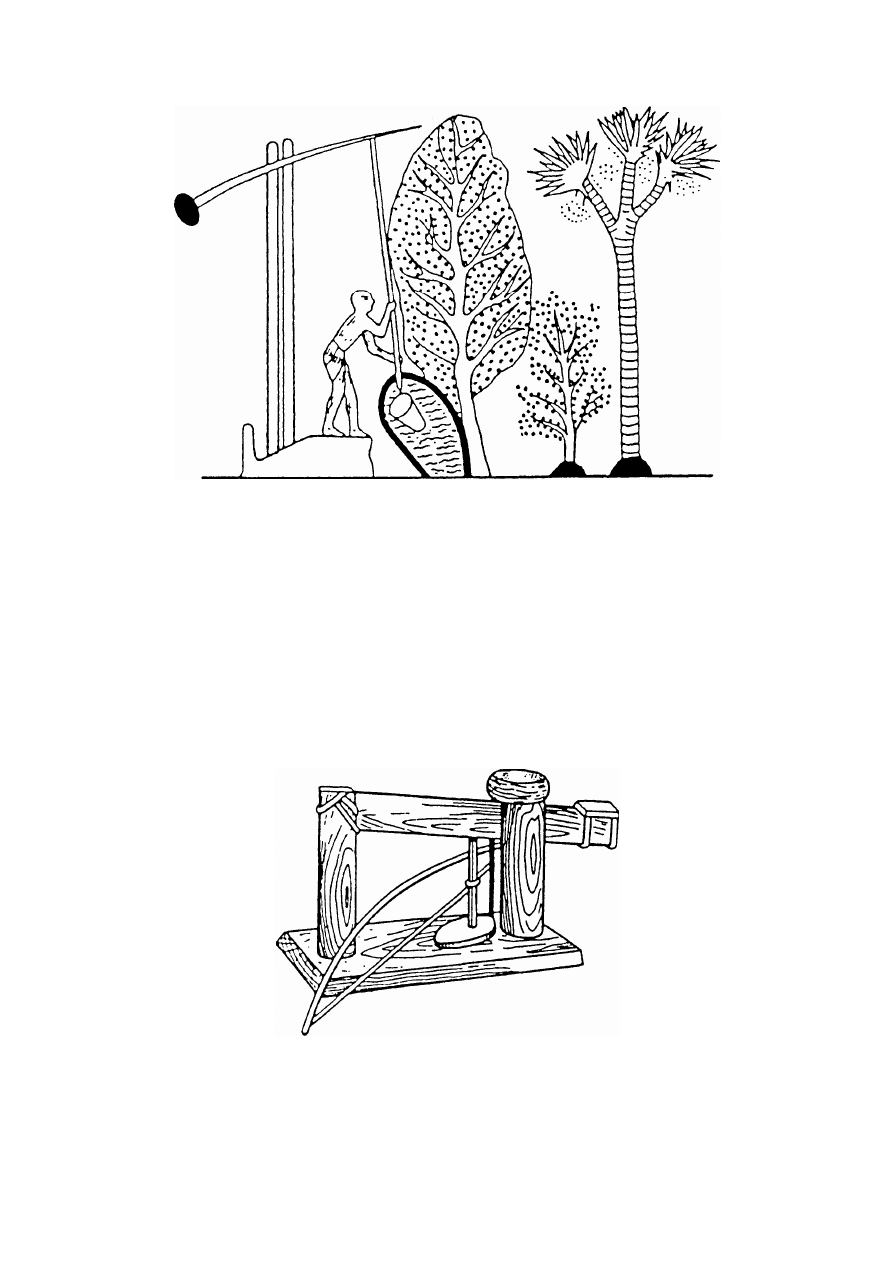
Dźwignia była pierwszym mechanicznym urządzeniem realizującym ruch obrotowy (rys. 2) i
znana była pod nazwą żurawia już w starożytnym Egipcie. Tak narodziło się stosowane
dzisiaj połączenie zwane parą kinematyczną obrotową. Dźwignia jest przodkiem łopaty i
wiosła. Po upływie wielu stuleci dźwignia stała się mechanizmem o własnym napędzie,
realizującym określoną funkcję niezależną od ruchów człowieka. Jej zastosowanie stało się
ogromne. Rękojeści, klawisze, pedały, korby, środki przekazywania ruchu i siły to kilka
przykładów stosowania dźwigni.
3
Rys. 2. Żuraw w starożytnym Egipcie
Wykorzystanie klina i dźwigni wykonanych ręką człowieka stworzyło granicę między
człowiekiem a jego zwierzęcymi przodkami, czyniąc go istotą zdolną do wykonania narzędzi
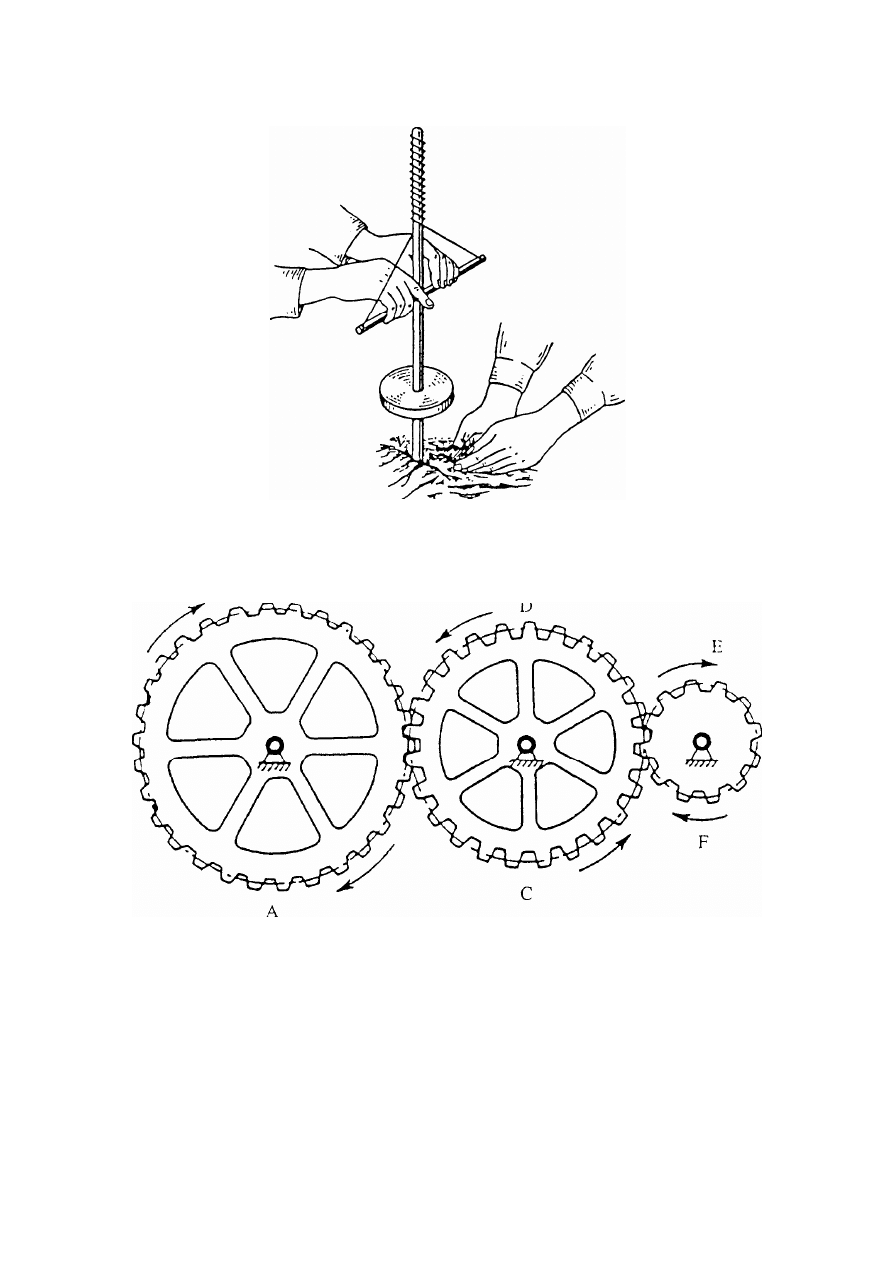
pracy. Niezależnie odkryto wiertło i wiercenie, czyli ruch złożony z ruchu obrotowego
połączonego z jednoczesnym ruchem postępowym wzdłuż osi obrotu z punktu widzenia
kinematyki. Wynalazek ten był niezbędny do obróbki takich materiałów, jak drewno, kość,
kamień, gdzie za mała była siła ręki ludzkiej (rys. 3). Ten ruch złożony był możliwy dzięki
budowie anatomicznej przedramienia, którego kości są tak połączone, że pozwalają na obrót
o kąt 180°. Odkrycie wiercenia stanowiło ważny krok w rozwoju myślenia abstrakcyjnego,
gdyż wprowadziło do techniki taki ruch, którego człowiek pierwotny być może nie
zaobserwował w przyrodzie, mimo jego obecności.
Rys. 3. Urządzenie do wiercenia, czyli ruchu złożonego z ruchu obrotowego i postępowego
Połączenie klina i dźwigni w jedno narzędzie było punktem wyjściowym w rozwoju
mechanizmów i maszyn oraz techniki. Pośród ogłuszającego szumu ucieleśnionych
reprezentantów maszyn przebiega jej „cicha życiowa funkcja", czyli obrót. Tak napisał
twórca współczesnej kinematyki mechanizmów, F. Reuleaux, w książce nt. Theoretische
4
Kinematik wydanej w 1875 roku.
Wraz z rozwojem narzędzi prostych rozpoczyna się ich specjalizacja oraz przejście do
narzędzi złożonych. Łuk, cięciwa i strzała to przodkowie takich maszyn technologicznych jak
wiertarka i tokarka, a także instrumentów muzycznych. Łuk, pierwsza maszyna energetyczna,
która magazynuje energię potencjalną i szybko ją przekształca w energię kinetyczną, a
następnie katapulta, wiążą się z odkryciem prowadnicy, bez której nie do pomyślenia był
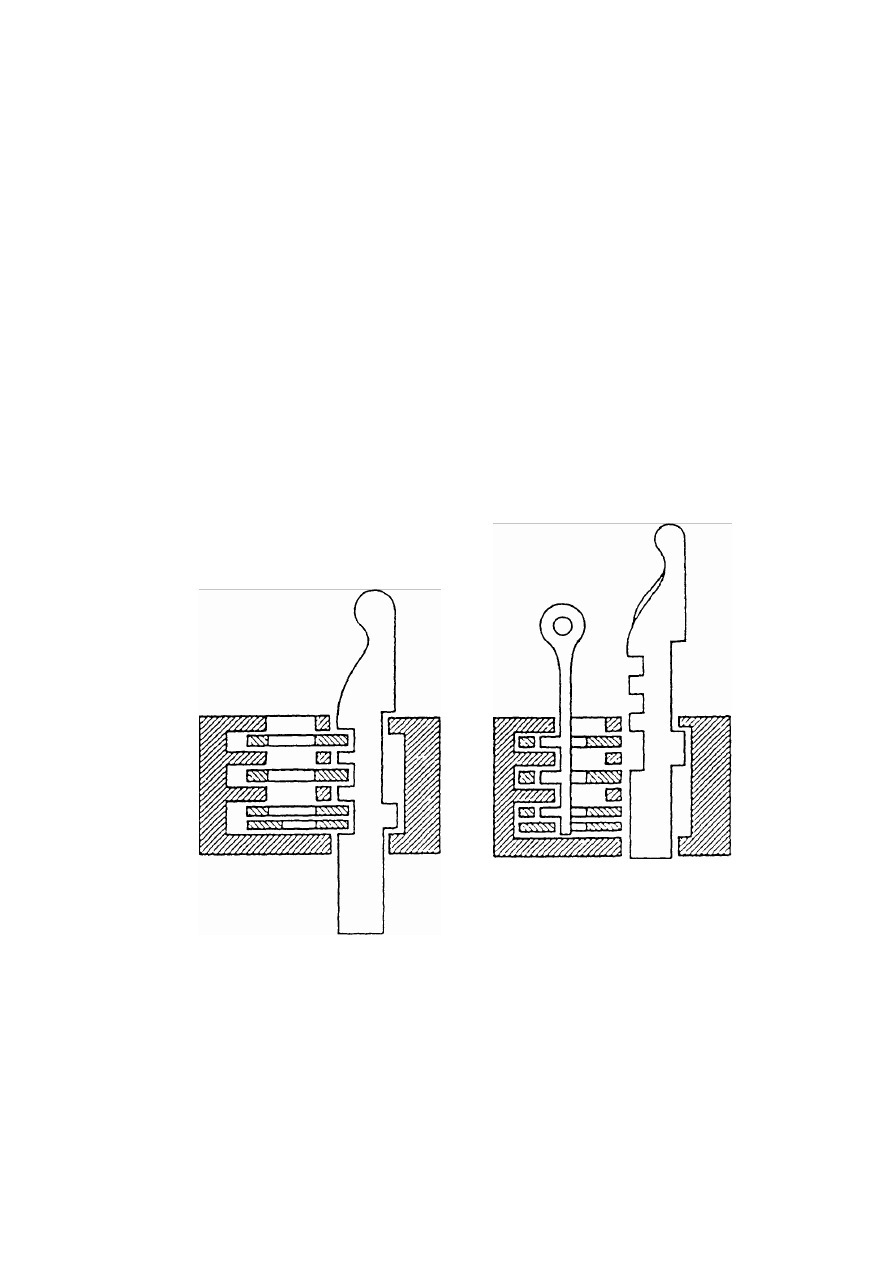
przymusowy ruch postępowy, jak np. w mechanizmie zamka (rys. 4). Stąd rodowód: zasłon,
zasuw, wież wyciągowych, młotów i pras hydraulicznych. Prowadnica prostoliniowa
występuje w takich współczesnych maszynach roboczych, jak: piła, maszyna tkacka, suport
tokarki, silnik spalinowy, mechanizm igły w maszynie do szycia, mechanizm rozrządu pary w
parowozie oraz przyrząd do wykreślania elipsy (rys. 5). Rozwój wiertła, po wyeliminowaniu
ograniczenia ruchu narzuconego przez rękę (obrót najwyżej o 180°), doprowadził szybko do
odkrycia łożyska ślizgowego. Odkrycie łożyska pociągnęło za sobą rozwój przekładni, a
następnie transmisji. Pojawiło się z kolei zagadnienie kierunku ruchu obrotowego, a to
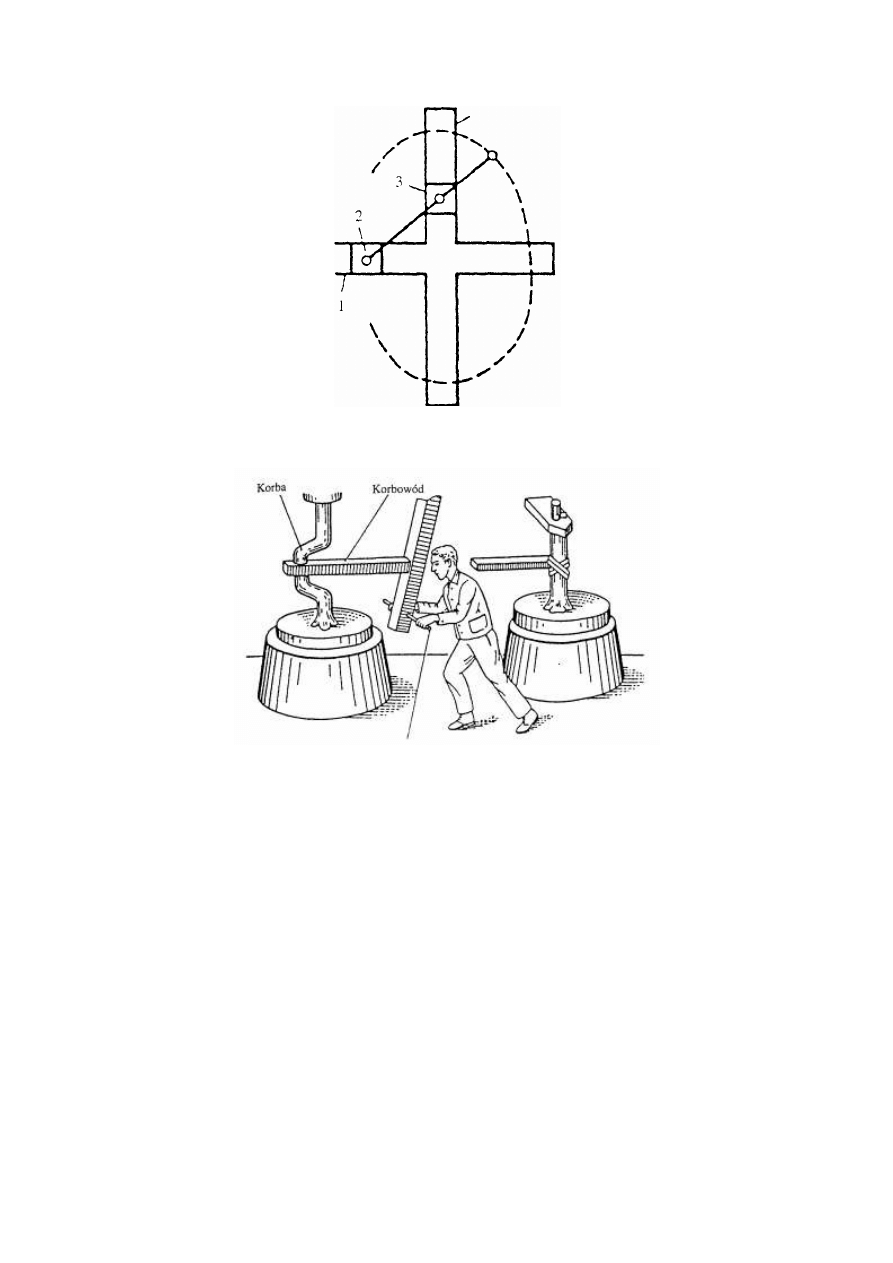
doprowadziło do odkrycia mechanizmu korby i korbowodu, czyli przodka dzisiejszego
mechanizmu korbowego. Mechanizm korbowy powstał w praktyce wiertniczej, ponieważ
silny nacisk na trzpień kołowrotu powodował wzdłużne zginanie i wykształcanie się
wykorbienia. Stąd już był w XV - XVI wieku jeden krok do wykonania obrotu wykorbienia
ręką, następnie przekształcenia dłoni w czop, a przedramienia w korbowód, co przedstawiono
na rys. 6.
Rys. 4. Mechanizm zamka w położeniu zamkniętym i otwartym
5
Rys. 5. Przyrząd do wykreślania elipsy; cyfry oznaczają człony mechanizmu
Tu pojawi się tłok
Rys. 6. Przekształcenia dłoni w czop, a przedramienia w korbowód
Zastąpienie ręki mechanizmem korbowym, pozwalającym - dzięki odpowiedniemu
napędowi - na przekształcenie ruchu postępowego w obrotowy i na odwrót spowodowało, że
mechanizm korbowy stanowi podstawę konstrukcji maszyny parowej i silnika spalinowego.
Zastosowanie mechanizmu korbowego w XIX wieku pozwoliło Franciszkowi Reuleaux
stwierdzić, oczywiście w przenośni, iż bogactwo mechanizmów stosowanych w technice
można wyrazić słowami ... „wszystko się obraca".
Odkrycie ruchu obrotowego doprowadziło do skonstruowania koła zamachowego, po
raz pierwszy zastosowanego w maszynach włókienniczych. W praktyce przyczyniło się to do
skasowania przerw w nawijaniu nici na szpulę (rys. 7). Zupełnie niezależnie rozwijało się
koło i krzywka, elementy o powierzchni roboczej krzywej, których historia sięga okresu
przetaczania ciężarów. Od czasów rzymskich do okresu manufaktury kołowroty i
wydobywcze maszyny górnicze jako podstawę ruchu miały koła z nożnym lub ręcznym
napędem. Przejście od napędu nożnego do ciernego stworzyło nowy typ przekazywania
ruchu. Pojawiła się walcowa przekładnia zębata przedstawiona na rys. 8, której znaczenie jest
istotne, a następnie przekładnia śrubowa (rys. 9). W tym czasie powstały także połączenia
śrubowe (rys. 10).
6
Rys. 7. Koło zamachowe umożliwiło skasowanie przerw w nawijaniu nici na szpulę
Rys. 8. Walcowa przekładnia zębata
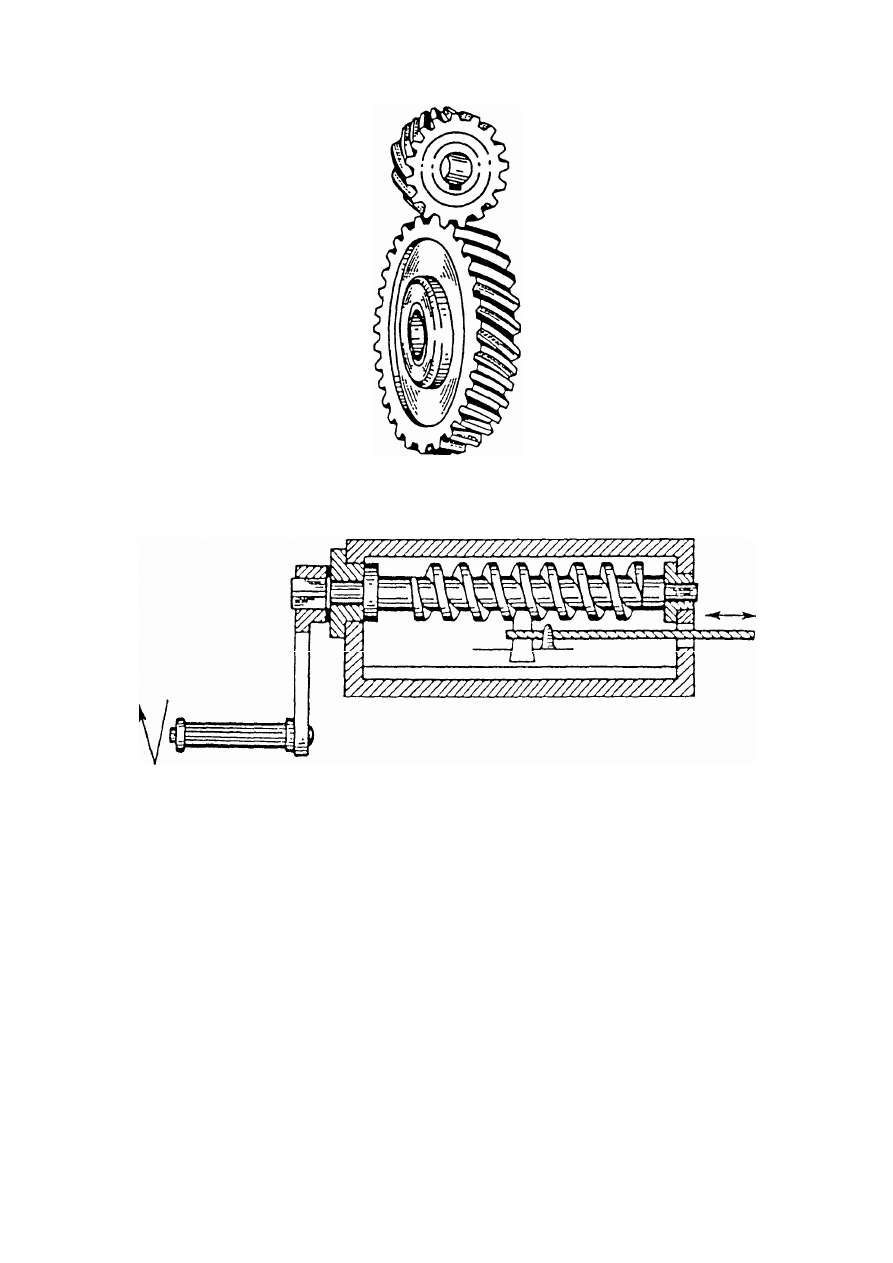
7
Rys. 9. Przekładnia zębata śrubowa
Rys. 10. Połączenie śrubowe
Narzędzia przekształcone w zespoły połączonych członów, które wykonują ruchy
wynikające z rodzaju i połączenia, to dzisiaj powszechnie stosowane pary kinematyczne.
Prowadnica w połączeniu z członem ruchomym to para postępowa , korba i korbowód to
para obrotowa, śruba i nakrętka zezwalająca na jednoczesny obrót i postęp to para śrubowa.
W taki sposób nastąpiło przeobrażenie łuku i wiertła do wyspecjalizowanych technicznie
mechanizmów o ruchu cyklicznym, czyli okresowo powtarzającym się. Przejście zatem do
napędu wietrznego, wodnego, parowego i elektrycznego zastąpiło energię ludzką.
W imperium rzymskim (Vitruvius, 35 r. p.n.e.) narodził się przodek dzisiejszego
agregatu maszynowego*, w którego konstrukcji można było wyodrębnić silnik, przekładnię i
organ wykonawczy. Był to młyn wodny do mielenia ziarna zbożowego.
-----------------------------------------------------------------------------------------------------------
*)
W narzeczu doryckim wyraz „mechene"' oznacza po prostu środek pomocniczy (narzędzie). A więc wyrazy
mechanika i maszyna mają wspólny źródłosłów. W I wieku p.n.e. znajdujemy u Cycerona słowo „machina", u
Cezara i Witruwiusza „mechinotio", a u Liwiusza „machinamentum" (F. Feldhaus: Maszyny w dziejach ludzkości.
Warszawa, PWT 1958, str. 11).
8
Kamień młyński unieruchomiono na wrzecionie osadzonym na wale koła przekładni
zębatej, a żarno zostało umieszczone ponad wałem kamienia młyńskiego. W XI i XII wieku
nastąpiło szerokie rozpowszechnienie maszyn wodnych. W XII i XIV wieku zastosowano
silnik wodny w maszynach tkackich, w XIV wieku w górnictwie i metalurgii, a w XV wieku
w przemyśle papierniczym i włókienniczym. Wykorzystanie silnika wodnego do napędu
maszyn roboczych wykazało użyteczną i szkodliwą rolę tarcia w maszynach.
Przekładnię zębatą wprowadzono po raz pierwszy w mechanizmie zegarów w XIV
wieku (Mediolan 1335 r.). Prace nad modyfikacją zazębień zegarowych w XVIII wieku, za
które parlament angielski wyznaczył wysoką nagrodę, doprowadziły do odkrycia zarysu
ewolwentowego i cykloidalnego zębów. Angielski uczony, Gramm, zastąpił metalowe
łożyska zegara kamieniami (dziś stosuje się rubiny) o małym współczynniku tarcia.
Tak powstała i rozwijała się maszyna utworzona jako mechanizm, zespół
mechanizmów z połączenia par kinematycznych (łańcuch kinematyczny), w którym przy
jednym członie nieruchomym pozostałe człony wykonywały określone ruchy, a całość pracę
użyteczną. W dalszym rozwoju maszyn wyraźnie przejawia się rola łańcucha kinematycznego
złożonego z par postępowych (para klinowa), obrotowych (mechanizm korbowy, czworobok)
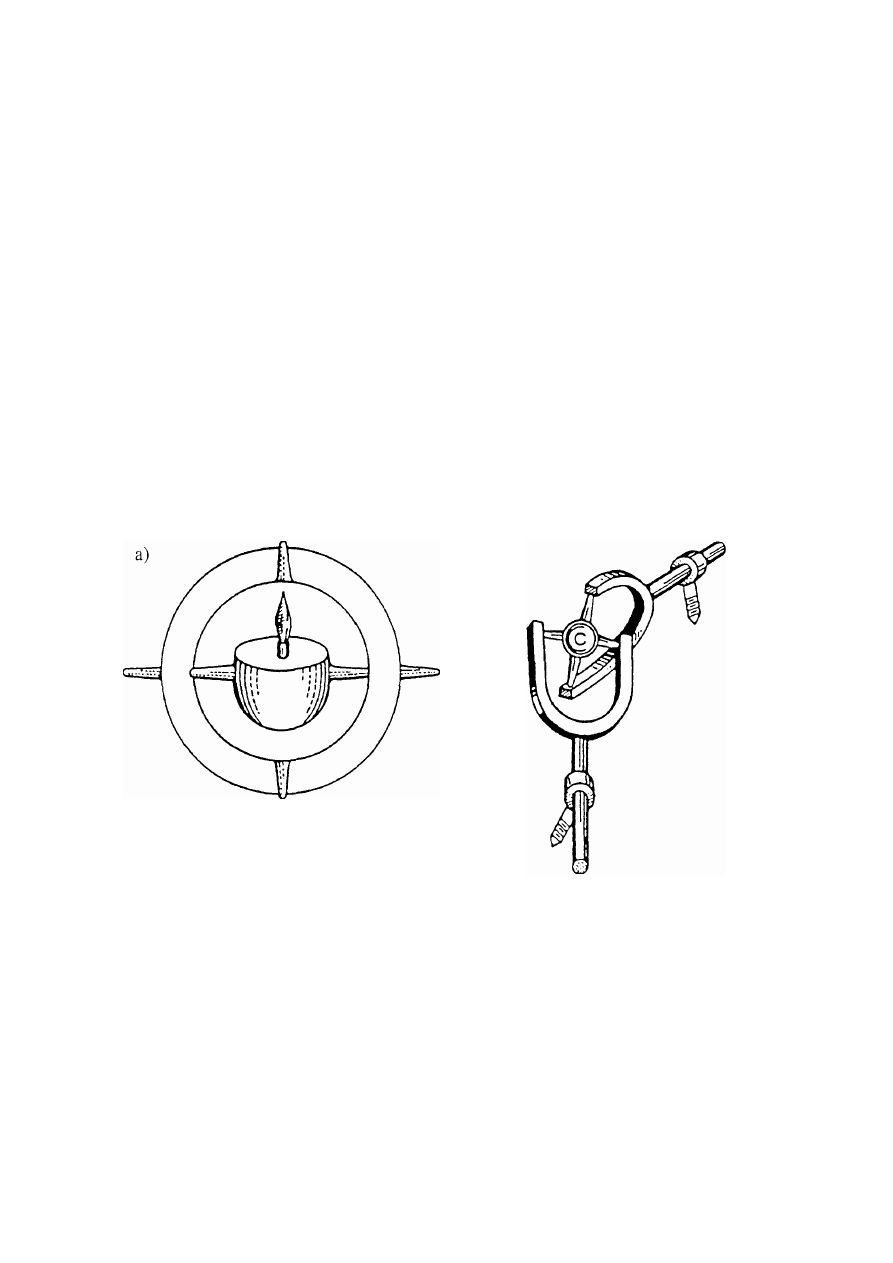
i par śrubowych. Szczególnie ważne znaczenie miał mechanizm czworoboku przegubowego i
zawieszenia Hooke'a, będące udoskonaleniem przegubu Cardano (rys. 11).
Rys. 11. Schemat mechanizmów: zawieszenie Hook’a i przegubu Cardana,
Gwałtowny rozwój maszyn parowych (Newcomen 1705 r., Watt 1769 r.) uczynił wiek
XVIII i XIX okresem kinematyki mechanizmów. Dalszym krokiem, tym razem już w
kierunku automatyzacji, było zbudowanie automatycznej maszyny przędzalniczej, tzw.
samoprząśnicy wózkowej. Prace Robertsa (1799 r.) i Donkina (1808 r.) doprowadziły do
skonstruowania automatycznej maszyny papierniczej, a ponadto Roberts w 1825
r. rozwiązał
zagadnienie przekładni, zwiększenia prędkości i regulacji biegu maszyn. Dalszy rozwój
maszyn był związany z rozwojem elektrotechniki i maszyn elektrycznych. Stworzyło to
warunki przejścia od napędów transmisyjnych do indywidualnych. Tak więc koniec XIX
wieku i początek XX wieku to epoka powstawania zespołów elektromechanicznych.
Z tego krótkiego przeglądu wynika, że współczesna maszyna powstała i była ulepszana
b)
9
na przestrzeni wielu stuleci. Odkrycia dokonane przez utalentowanych wynalazców
doprowadziły do powstania tysięcy odmian mechanizmów, które konstruowano zgodnie z
intuicją i doświadczeniem, bez podstaw teoretycznych. Ostatnie sto kilkadziesiąt lat to okres
rozwoju podstaw teoretycznych do konstruowania maszyn i metod badawczych, bez których
nie powstałyby mechanizmy i maszyny XX wieku i lat przyszłych.
Również i polscy uczeni w XVII i XVIII wieku wnieśli istotny wkład w rozwój myśli
technicznej w dziedzinie maszyn i mechanizmów. Przedstawiciele tak zwanej jezuickiej
szkoły mechaniki: Kochański, Solski i Tylkowski opisali w swoich pracach wiele ciekawych
mechanizmów. W pracy Solskiego Architekt Polski z 1690 roku (reedycja 1959 r.), która
wbrew tytułowi jest podręcznikiem mechaniki technicznej, znajdujemy szczegółowy opis:
wagi, kafara górniczego i studziennego, wielokrążka, przekładni zębatej, prasy śrubowej,
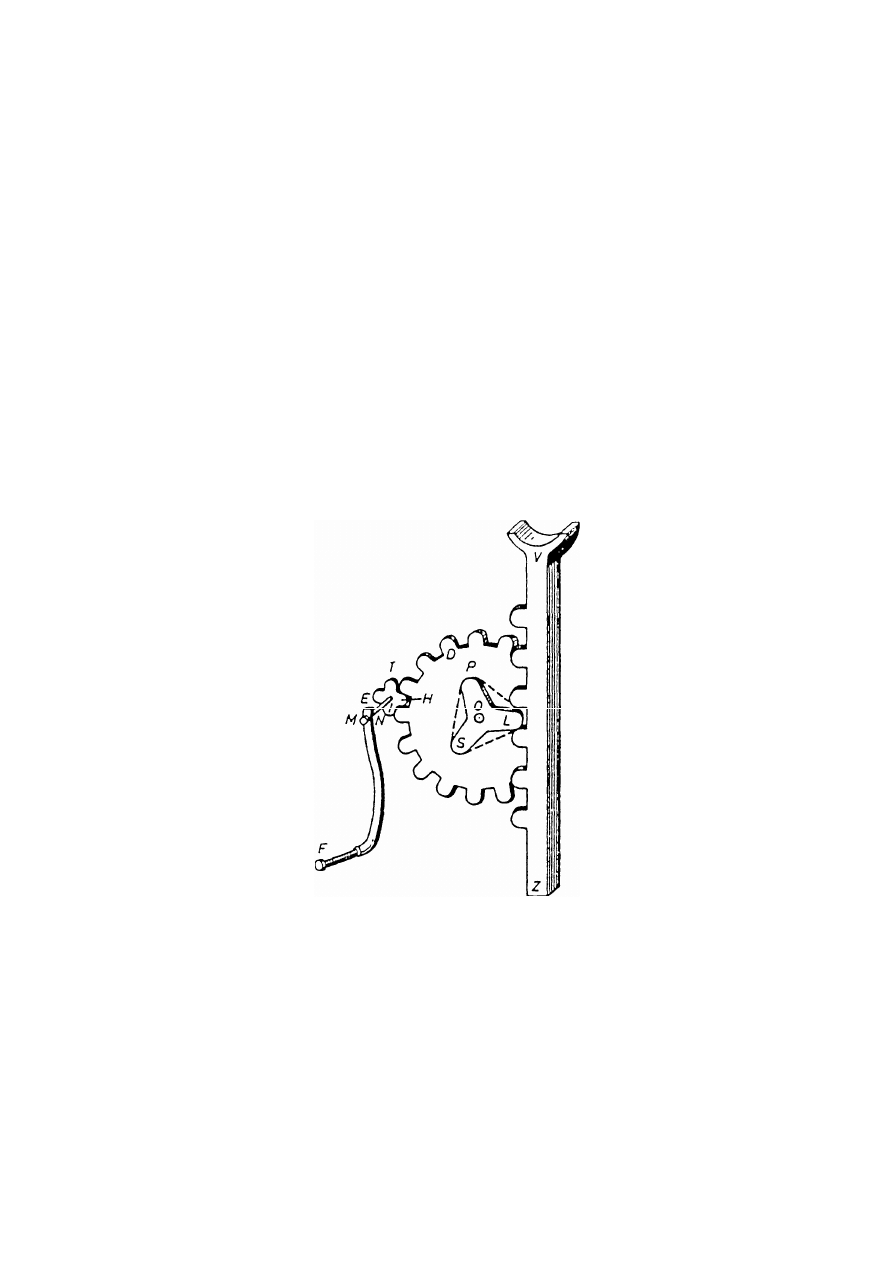
lewara wozowego itp. Szczególnie ciekawe są pierwsze dwie księgi (nt. Zabawy). Z pierwszej
z nich przytoczono następujące stwierdzenia:
„l. Moc i siłę wszystkich machin sposobnych do ulżenia ciężarów opisuje i podaje sposoby do
przemagania ciężarów zbyt wielkich małymi siłami".
„2. Pokazuje, jako: wiele ciężaru przydają koła większe, gdy obracają mniejsze, dla prędkości
mniejszych, jako mają być dzielone i czego przestrzegać w piełach i we młynach wodnych,
konnych, wietrznych i ręcznych" [Architekt Polski, str. 5]. Na rys. 12 przedstawiono lewar
wozowy opisany przez Solskiego w 1690 r.
Rys. 12. Lewar wozowy opisany przez Solskiego w 1690 r.
Współczesna teoria maszyn i mechanizmów zajmuje się analizą, syntezą, dynamiką,
projektowaniem, sterowaniem i pomiarami mechanizmów i maszyn. Jej rozwój w Europie i
USA zapoczątkowały osiągnięcia szkoły niemieckiej i rosyjskiej (o tradycji ponad 150 lat).
Istotny wkład wnieśli uczeni niemieccy, jak np. L. Burmester (1840 - 1927) autor Lerbuch
der Kinematik z 1880, M. Grűlbler (1851-1935) autor Getriebelehre... z 1917 r., F.
Wittenbauer (1857-1922). który napisał Technische Dynamik w 1923 oraz badacze rosyjscy,
np. . Assur (1878-1920). N.E. Żukowski i N.I. Miercałow (1866-1948). Tradycje „niemieckiej
szkoły TMM” kontynuowali: R. Beyer. K. Hain, W. Lichtenheldt, . Meyer zur Capellen, K.
Łuck. J. Volmer, G. Bőgelsack. M. Hiller i inni. Równolegle „rosyjską szkolę TMM"

10
tworzyli: W. W. Dobrowolski, I.I., Artobolevski, N.G. Brujvicz, F.M. Dimentberg, S.N.
Kożewnikow, A.P. Bessonov, K. Frołov i A. Kobryński. Natomiast szkolę TMM w USA
tworzyli tacy uczeni jak F. Freundenstein, F. Crossley, B. Rothi, R. Hartenberg, B. Ravani i
K. Waldron.
Obecnie badania nad teorią maszyn i mechanizmów są prowadzone w ponad 40 krajach
zrzeszonych w Międzynarodowej Federacji TMM (IFToMM). Ukazuje się pismo Mechanism
and Machine Theory', wydawane przez Pergamon Press od 1965 r.
W Polsce pierwsze wykłady z TMM zapoczątkował R. Szewalski w Politechnice
Lwowskiej w 1938 roku. W Politechnice Warszawskiej wykłady prowadził W. Moszyński
(1952), następnie J. Oderfeld, A. Marecki, A. Olędzki (od 1955 r.). W Politechnice Łódzkiej
wykłady wprowadził Z. Parszewski w 1954 r., w Politechnice Krakowskiej - J. Korecki (1954
r.), natomiast S. Trzaska (1953 r.) w Wojskowej Akademii Technicznej. Obecnie w Polsce
dyscyplina TMM jest prowadzona w 21 Politechnikach na 31 Wydziałach.
Do analizy i syntezy są stosowane współcześnie przede wszystkim metody analityczne
i numeryczne. Używane obecnie oprogramowania, jak np. ADAMS, MATLAB, ANSYS,
Simulink. Madymo i inne umożliwiają analizę płaskich i przestrzennych mechanizmów,
maszyn, manipulatorów i robotów. Animacja ruchu umożliwia obserwację wizualną położeń,
prędkości i przyspieszeń. Kinematyka rozpatruje również, kwestie więzów, mechanizmów
przesztywnionych, inwersji, ograniczeń ruchu, napędów.
Projektowanie mechanizmów obejmuje takie zagadnienia, jak np. przekształcanie
ruchu, synteza mechanizmu dla zadanych położeń lub trajektorii. Stosuje się metody
analityczne oraz procedury optymalizacyjne. Użyteczne są różne metody komputerowe.
Opracowano programy dla poszczególnych rodzajów mechanizmów, jak np. prostowody
przybliżone, pantografy, mechanizmy sferyczne, przeguby uniwersalne, mechanizmy
zawieszenia i inne. Przedmiotem analizy są również mechanizmy krzywkowe. Mechanizmy
te są stosowane w rozrządach silników spalinowych i w obrabiarkach. Analiza dotyczy
określenia prawa ruchu popychacza, a synteza - zaprojektowania krzywki do zadanego prawa
ruchu. Stosuje się tym przypadku również procedury oprogramowania MATLAB. Analiza
mechanizmów przestrzennych polega na określeniu położeń, prędkości i przyspieszeń
mechanizmów robotów, szeregowych, równoległych i mieszanych, np. platformy Stewarta.
Rozwiązuje się tutaj zagadnienia proste i odwrotne dynamiki. Ważnym rozdziałem TMM są
przekładnie zębate. Przedmiotem badań są przekładnie walcowe, stożkowe, śrubowe oraz
specjalne, np. harmoniczne. Analiza dynamiczna dotyczy badań nad ruchem maszyn pod
działaniem sił, w których są stosowane metody: Lagrange' a, Newtona - Eulera, Kane'a. i
innych, umożliwiające rozwiązanie zarówno zagadnień prostych, jak i odwrotnych. Analiza
dynamiczna mechanizmów obejmuje analizę statyczną sił i momentów sił bez tarcia lub z
uwzględnieniem tarcia. Ważnym działem dynamiki maszyn jest wyrównoważanie maszyn,
szczególnie o ruchu obrotowym. Do tego celu służą specjalne maszyny zwane wyważarkami
dynamicznymi. Obecnie stosowane maszyny są układami pracującymi przy dużych
prędkościach obrotowych, stąd powstają różne niekorzystne zjawiska, np. drgania, co
wymaga budowania specjalnych eliminatorów drgań. Oddzielnym zagadnieniem jest zadanie
regulacji i sterowania biegu maszyn. Układ sterowania ruchem maszyny lub zespołu
maszynowego jest złożonym układem elektromechanicznym, w którym wykorzystano
różnego rodzaju regulacje, np. typu adaptacyjnego, krzepkiego i inne.
Badania doświadczalne mechanizmów i maszyn obejmują także zagadnienia związane
z czujnikami, aparaturą pomiarową, rejestrującą i opracowaniem wyników pomiarów.
Kwestią o dużym znaczeniu pozostaje ocena dokładności pomiarów, których istotną cechą
jest ich wielokanałowość.
Wyszukiwarka
Podobne podstrony:
PR ETI W 14 4 4
PR ETI W 14 6 1
PR ETI W 14 3 1
PR ETI W 3 4 3 5
PR ETI W 2
PR ETI W 1 3
PR ETI W 14 8 1
PR ETI W 1 3
PR ETI W 21 1
PR ETI W 25 6
PR ETI W 22 1
serwis pr, ETI SUM, sem 1
PR ETI W 3 1 3 3 3
PR ETI W 23 2 id 382135 Nieznany
PR ETI W 21 1
PR ETI W 11 id 382128 Nieznany
PR ETI W 14 5 1
PR ETI W 9 id 382139 Nieznany
PR ETI W 3 4 3 6
więcej podobnych podstron