
PODSTAWY ROBOTYKI
JW 3.4-3.6
1

4. Roboty i manipulatory o strukturach równoległych
Roboty o strukturach równoległych definiuje się jako roboty złożone z. dwóch tzw.
platform połączonych więcej niż jednym łańcuchem kinematycznym. Charakterystyczne dla
obrabiarek typu hexapod struktury równoległe są oparte na zamkniętym łańcuchu
kinematycznym. Taki sposób budowy ma istotne zalety w stosunku do konstrukcji
konwencjonalnych. Oś napędowa nie „dźwiga” innych osi napędowych. Dzięki małej masie
własnej członów ruchomych korzystniejsze są warunki do uzyskania dużych przyspieszeń.
Siła wychodząca z miejsca działania efektora nie jest przenoszona przez długi, szeregowy
łańcuch wielu elementów, lecz przez kilka równolegle działających ramion, z czego wynika
duża sztywność struktury układu. W następstwie przeważnie liniowego działania członów
wykonawczych w członach łączących, narażonych jedynie na obciążenie ściskające lub
rozciągające, uzyskuje się dla nich niewielki stosunek masy do sztywności. Powyższe zalety
można ująć w punktach:
możliwość realizacji ruchu w przestrzeni o 6 stopniach swobody,
korzystny stosunek masy do objętości,
duże prędkości i przyspieszenia osiągane przez platformę roboczą,
duża sztywność i wynikająca stąd wysoka dokładność pozycjonowania,
mała masa części ruchomych,
wysoka częstotliwość drgań własnych,
wszystkie napędy są identyczne (elementy powtarzalne), a silniki są umieszczone na
nieruchomej podstawie.
Przystosowanie tych struktur do przemysłu nie jest łatwe. Wiąże się to z ich wadami,
którymi są:
ograniczona przestrzeń robocza, często dużo mniejsza niż gabaryty robota,
bezpośrednie parametry geometryczno-kinematyczne są trudne do wyznaczenia,
wysokie wymagania w stosunku do układu sterowania, ponieważ są prowadzone
transformacje współrzędnych dla wszystkich sześciu osi,
występowanie punktów osobliwych w przestrzeni robota,
możliwość kolizji między podporami a efektorem,
wysokie sprzężenie między ruchomymi łańcuchami kinematycznymi,
duże cieplne długości oddziaływania.
Trudności są również związane z koniecznością efektywnego sterowania takich maszyn
w trzech lub więcej osiach jednocześnie. Dopiero wprowadzenie sterowników cyfrowych
umożliwiło prowadzenie odpowiednich obliczeń w czasie rzeczywistym.
Istnieje bardzo duży zestaw rozwiązań manipulatorów o strukturze równoległej. Podział
ich uwzględnia głównie liczbę szeregowych łańcuchów łączących platformę z podstawą,
zwanych ramionami robota. Najczęściej spotykane rozwiązania mają sześć lub trzy ramiona i
są zwane odpowiednio hexapodami i tripodami.
Według danych literaturowych maszyny na bazie hexapodów mogą mieć następujące
zastosowania:
w obróbce wiórowej: przecinanie materiału i frezowanie (obróbka form, obróbka
łopatek turbin itd.),
w szlifowaniu: szlifowanie narzędzi, dokładna obróbka materiałów ceramicznych,
w montażu: precyzyjny montaż, precyzyjne manipulowanie lekkimi przedmiotami,
w specyficznych zastosowaniach: cięcie i spawanie laserem, cięcie strugą wody, cięcie
plazmowe, wytwarzanie protez, wycinanie w drewnie, cięcie kryształów, wytwarzanie
wyrobów jubilerskich, polerowanie, stępianie ostrych krawędzi,
w obrabiarkach dużej wielkości (np. o konstrukcji bramowej); do wykonywania
dużych narzędzi np. form i matryc,
2
w nanotechnologii do manipulowania bardzo małymi obiektami.
4.1. Manipulatory równoległe o trzech stopniach swobody
4.1.1. Płaskie manipulatory równoległe
Płaski manipulator równoległy zawiera trzy napędzane kończyny o sterowanej zmiennej
długości między odpowiednimi przegubami przy platformie i podstawie, co umożliwia
osiągnięcie żądanej pozycji i orientacji platformy w granicach przestrzeni roboczej.
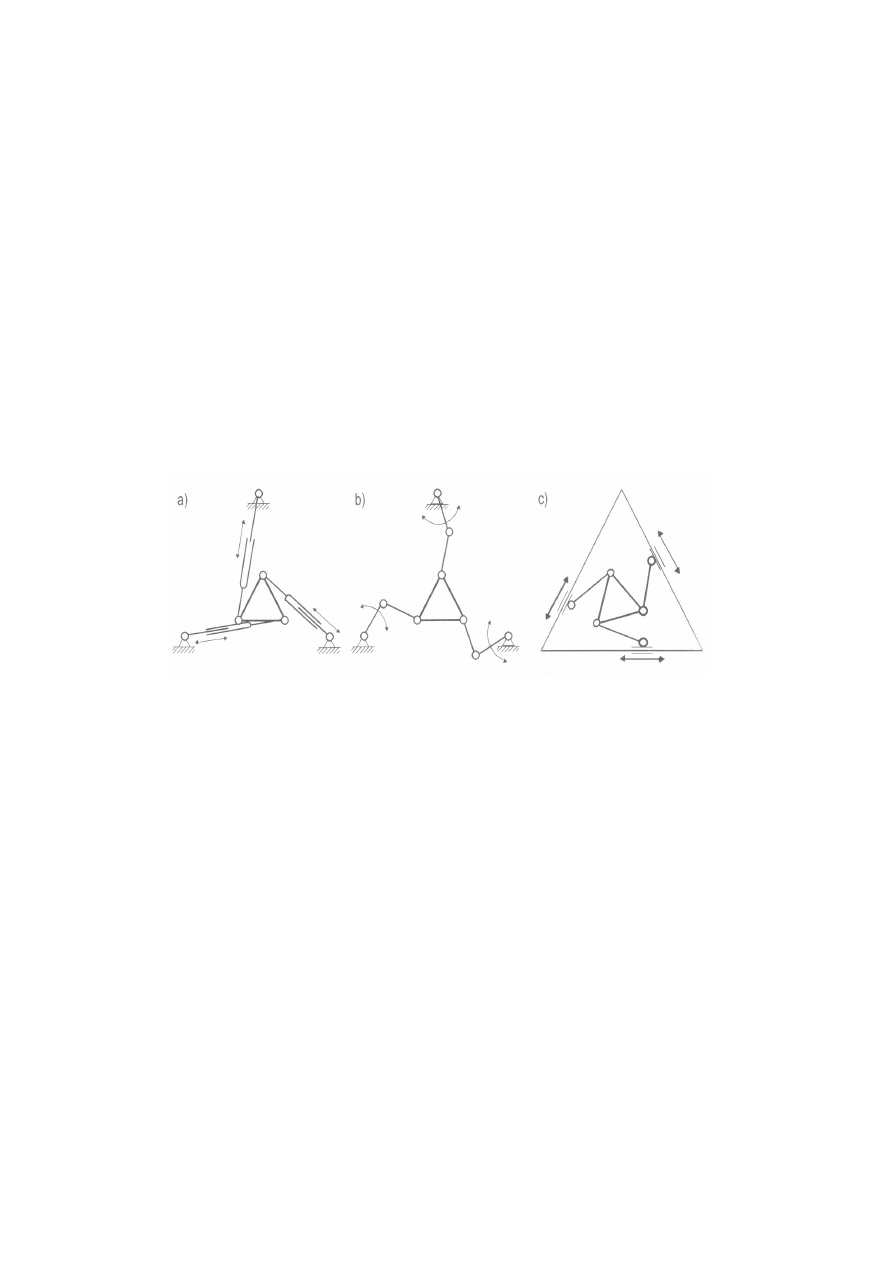
Rozróżnia się trzy typy płaskich manipulatorów równoległych o trzech stopniach
swobody:
manipulator 3(RRR) - płaski ruch platformy (przesunięcie i obrót) uzyskuje się przez
zmianę długości siłowników kończyn manipulatora (rys. 32a),
manipulator 3(RPR) - płaski ruch (przesunięcie i obrót) platformy jest określony przez
zmiany kątów konfiguracyjnych kończyn manipulatora zależnie od czasu (rys. 32b),
manipulator 3(PRR) piaski ruch platformy (przesunięcie i obrót) uzyskuje się przez
przesunięcie punktu bazowego wzdłuż boków podstawy (rys. 32c).
Rys. 32. Płaskie manipulatory równoległe: a) 3(RRR). b) 3(RPR), c) 3(PRR)
Manipulatory równoległe 3(RRR) charakteryzują się większą przestrzenią roboczą,
manipulatory 3(RPR) oraz 3(PRR) większym udźwigiem.
Płaskie manipulatory równoległe są używane w przemyśle elektronicznym do montażu
drobnych elementów. Dzięki ich zastosowaniu uzyskuje się wysoką dokładność
pozycjonowania i orientowania montowanych elementów. Manipulatory te charakteryzują się
wysokimi wartościami prędkości i przyspieszeń, co umożliwia użycie ich do szybkiego
montażu.
4.1.2. Sferyczne manipulatory równoległe
Pierwsze sferyczne manipulatory równoległe zostały zaprojektowane do celów
wojskowych. Ich zadaniem było orientowanie w przestrzeni anten radarowych i satelitarnych:
mogą być też stosowane do orientowania teleskopów, baterii słonecznych oraz w układach
zawieszeń pojazdów. Obecnie studiuje się możliwości wykorzystania sferycznych
manipulatorów równoległych w biomechanice, m.in. do zastąpienia istniejących sztucznych
stawów.
Sferyczne manipulatory równoległe charakteryzują się trzema rotacyjnymi stopniami
swobody platformy roboczej. Zawierają one trzy łańcuchy kinematyczne (RRR) lub (SPK),
łączące człon roboczy z podstawą, przy czym każdy z tych łańcuchów zastępuje jedno
napędzane połączenie obrotowe lub przesuwne.
3

Istnieją dwa rozwiązania sferycznych manipulatorów równoległych różniących się
rozmieszczeniem siłowników (rys. 33).
Rys. 33. Równoległe manipulatory sferyczne: a) siłowniki są rozmieszczone na
wierzchołkach podstawy. b) siłowniki są umiejscowione w jednej płaszczyźnie blisko siebie
Sferyczny manipulator 3(RRR) składa się z platformy połączonej z podstawą za
pomocą trzech łańcuchów kinematycznych z parami obrotowymi (RRR), gdzie każdy łańcuch
jest napędzany przez oddzielny siłownik umieszczony na podstawie. Takie rozmieszczenie
siłowników nie obciąża członów ruchomych i nie ogranicza ich masy. Charakterystyczną
cechą sferycznych manipulatorów równoległych 3(RRR) jest przecinanie się w jednym
punkcie osi wszystkich połączeń obrotowych. Podstawa i człon roboczy tworzą dwa
ostrosłupy o wspólnym wierzchołku. Osie połączeń obrotowych leżą na krawędziach tych
ostrosłupów.
Sferyczny manipulator o trzech stopniach może być również napędzany siłownikami
liniowymi. W takim przypadku człon roboczy jest podparty względem podstawy za pomocą
przegubu kulistego, określającego środek ruchu kulistego, a ponadto jest połączony z
podstawą za pośrednictwem trzech kończyn w trzech oddzielnych punktach. Każda z kończyn
ma połączenie kuliste z członem roboczym i połączenie z przegubem krzyżowym z podstawą.
Długości kończyn są sterowane za pomocą siłowników.
4.2. Przestrzenne manipulatory równoległe o większej liczbie stopni swobody
4.2.1. Platforma Stewarta i Stewarta-Gougha
Platforma Stewarta, której ogólny schemat kinematyczny przedstawiono na rys. 34, ma
sześć kończyn, połączonych z podstawą i platformą za pomocą przegubów kulistych
(sferycznych) lub krzyżakowych. Przez sterowanie zmianami długości wszystkich sześciu
kończyn można zapewnić platformie odpowiednią liczbę stopni swobody.
4
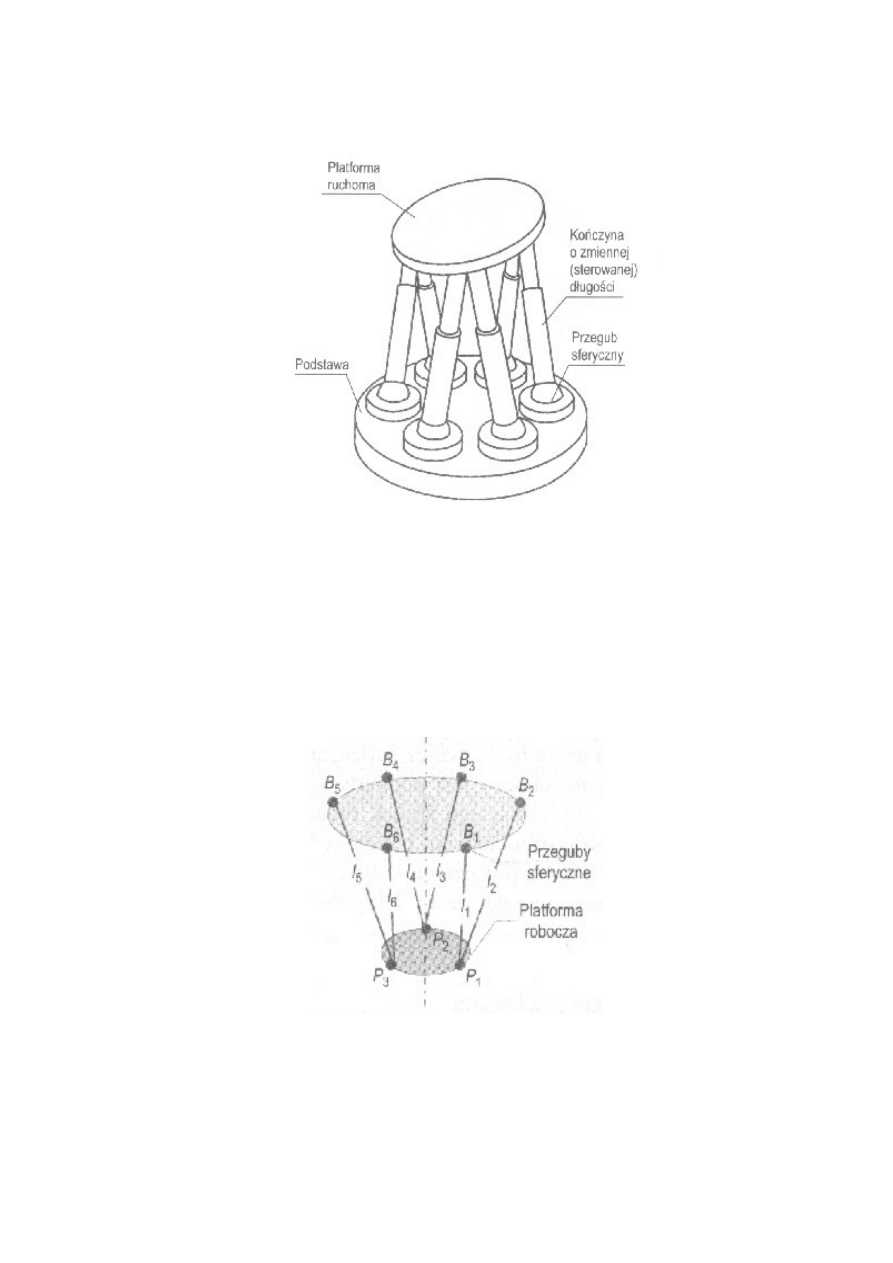
Rys. 34. Platforma Stewarta
Dla przestrzennych manipulatorów równoległych typu (6-6) o szczególnych
proporcjach wymiarów, np. o symetrycznym rozmieszczeniu przegubów przy płaskiej
podstawie lub płaskiej platformie (rys. 35). można otrzymać jawne rozwiązania zadania
prostego kinematyki do określenia położenia członu roboczego. Nic więc dziwnego, że
manipulatory o symetrycznej topologii równoległej ze swoimi zdolnościami manipulacyjnymi
są bardzo szeroko stosowane, choć wydaje się, że najlepiej będą wykorzystane w procesach
elastycznego montażu.
Rys. 35. Schemat ogólny platformy Stewarta-Gougha
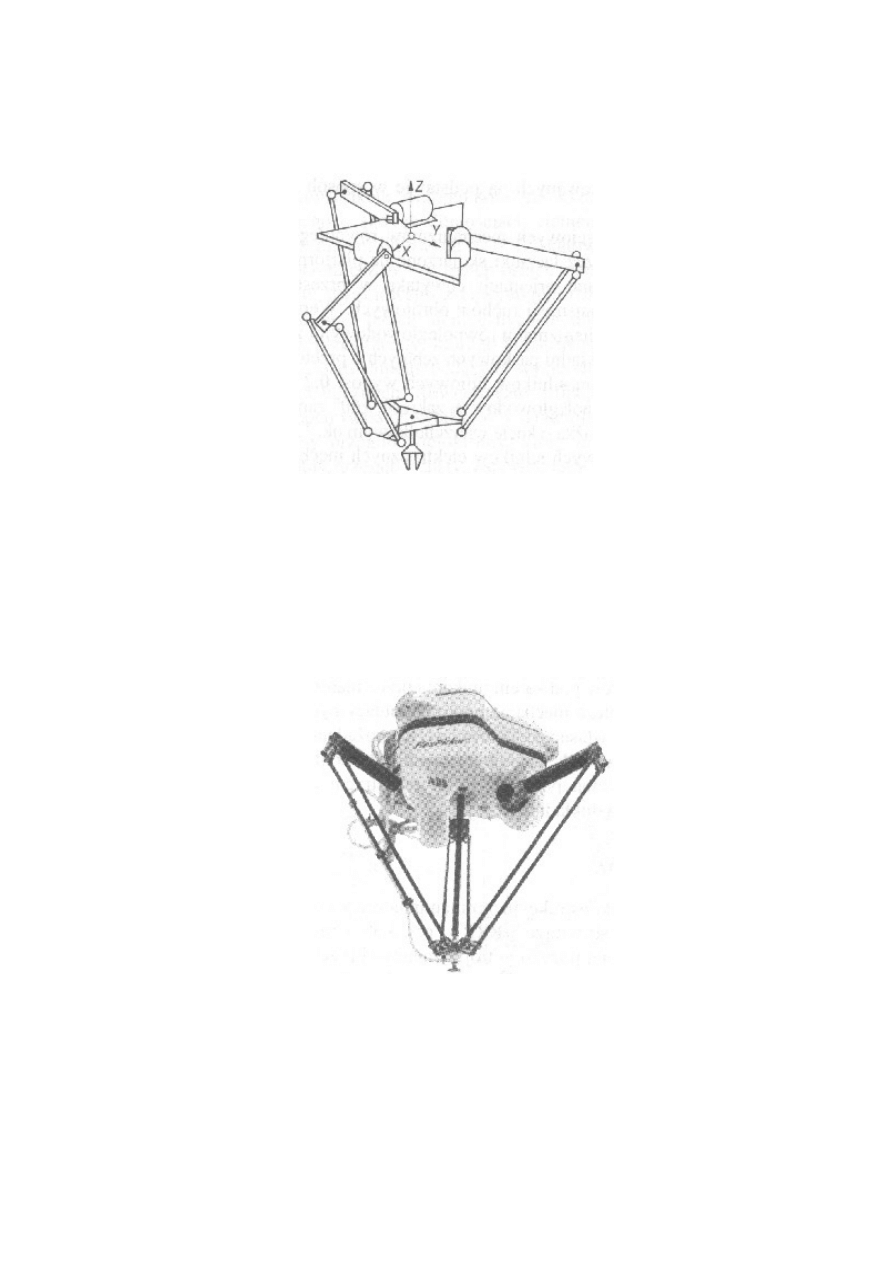
Na rys. 36 pokazano platformę Stewarta-Gongha zaprojektowaną z myślą o
zastosowaniu w neurochirurgii testowaną też w procesach elastycznego montażu. Na
platformie podstawowej (górnej) rozmieszczono symetrycznie sześć przegubów kulistych, a
na platformie roboczej (dolnej) 3x2 przegubów kulistych, które są połączone za
5
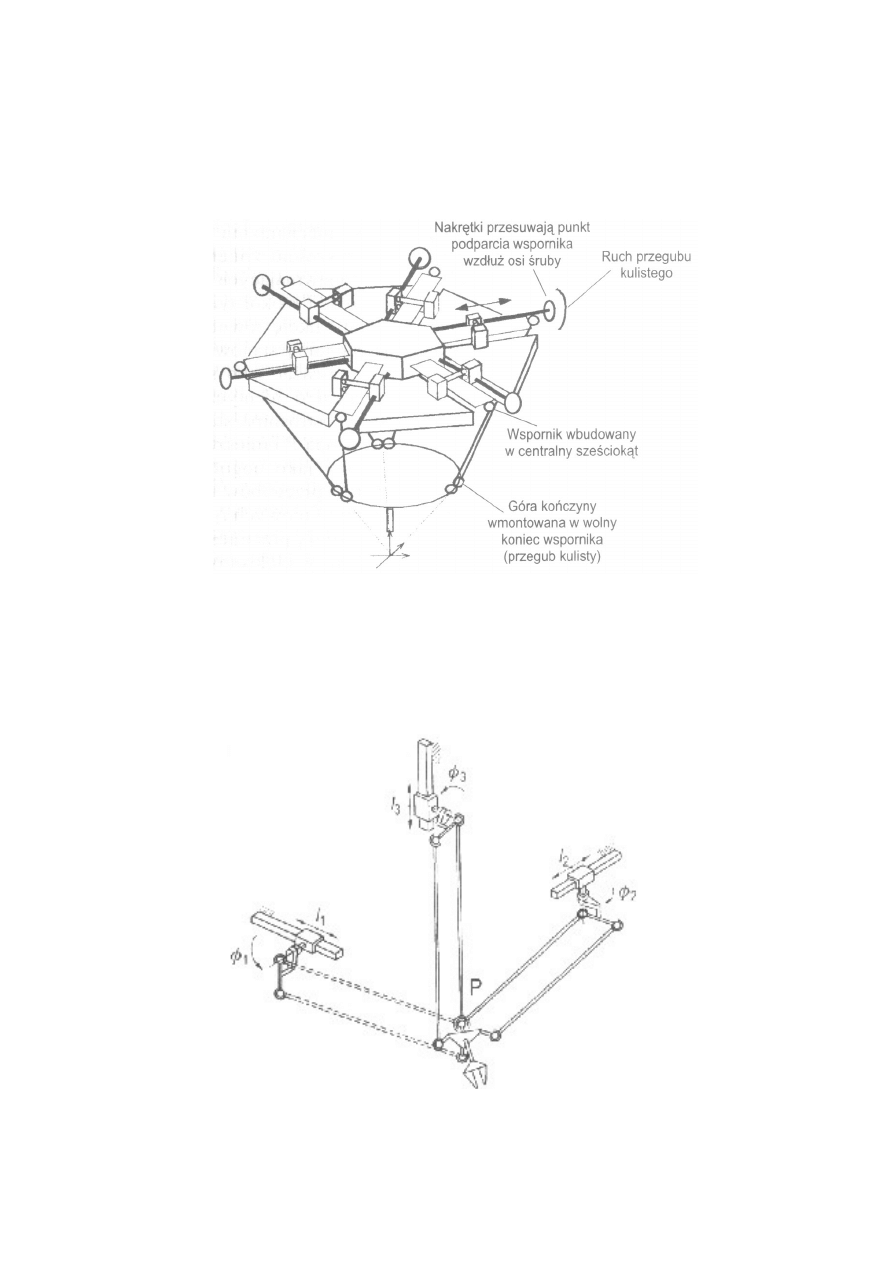
pośrednictwem sześciu kończyn, gdzie każda para kończyn tworzy trójkąt równoboczny.
Zmianę położenia platformy roboczej uzyskuje się poprzez obracanie sześcioma nakrętkami,
a więc zamiana ruchu obrotowego na postępowy powoduje przemieszczanie się punktów
podparcia wspornika wzdłuż osi śruby.
Rys. 36. Prototyp platformy Stewarta-Gougha
4.2.2. Manipulator równoległy o strukturze POLMAN
Ogólną koncepcję dźwigniowego mechanizmu przestrzennego wykorzystanego w
konstrukcji manipulatora POLMAN pokazano na rys. 37.
Rys. 37. Koncepcja ogólna manipulatora równoległego POLMAN-3-3
6
Konstrukcja manipulatora ma kształt dźwigniowego mechanizmu przestrzennego o
stałych długościach elementów ruchomych i sześciu zmiennych współrzędnych: liniowych l
1
,
l
2
i l
3
i kątowych φ
1
, φ
2
i φ
3
, zapewniających realizację przemieszczeń w trzech osiach i
zmianę kątów orientacji wokół tych osi elementu wyjściowego z chwytakiem. Mechanizm ma
konstrukcję równołeglą i składa się z trzech identycznych modułów. Platformę ruchomą
stanowi półkrzyżak przestrzenny, którego konstrukcję wygodnie jest rozważać jako
skojarzoną z ostrosłupem będącym wyciętym narożem sześcianu o identycznych ścianach
tłocznych. Równoboczny trójkąt ściany podstawy ostrosłupa stanowi płytę mocowania
chwytaka. W wierzchołku głównym ostrosłupa P umieszczono specjalny przegub
wielokrotny, który może być traktowany jako uogólniony trzykrotny przegub kulisty,
zapewniający wspólny punkt stały przegubów trzech łączników zawieszenia platformy na
wózkach trzech silników liniowych l
1
, l
2
i l
3
ulokowanych na podstawie. Zmiany
współrzędnych l
i
wywołują przemieszczenia punktu P w przestrzeni. Łączniki związane z
przegubem wielokrotnym są nazywane łącznikami przemieszczeń. Są one połączone z
wózkami za pomocą przegubów kulistych. W wierzchołkach trójkąta równobocznego
platformy ruchomej umieszczono przeguby kuliste kolejnych trzech łączników skojarzonych
z łącznikami przemieszczeń, tak ze każdy z nich ma identyczną długość jak łącznik, z którym
jest skojarzony, a na drugim końcu jest zakończony przegubem kulistym związanym z tzw.
mostkiem o długości identycznej jak krawędź boczna ostrosłupa platformy ruchomej. Mostki
są związane z wózkami silników l
i
obrotowo, w ten sposób że punkty stałe przegubów
łączników przemieszczeń nie zmieniają swego położenia w układach wózków (znajdują się na
osiach obrotu), natomiast mostki z punktami stałymi przegubów łączników skojarzonych
mogą być obracane wokół tych osi o kąty φ
1
, φ
2
i φ
3
.
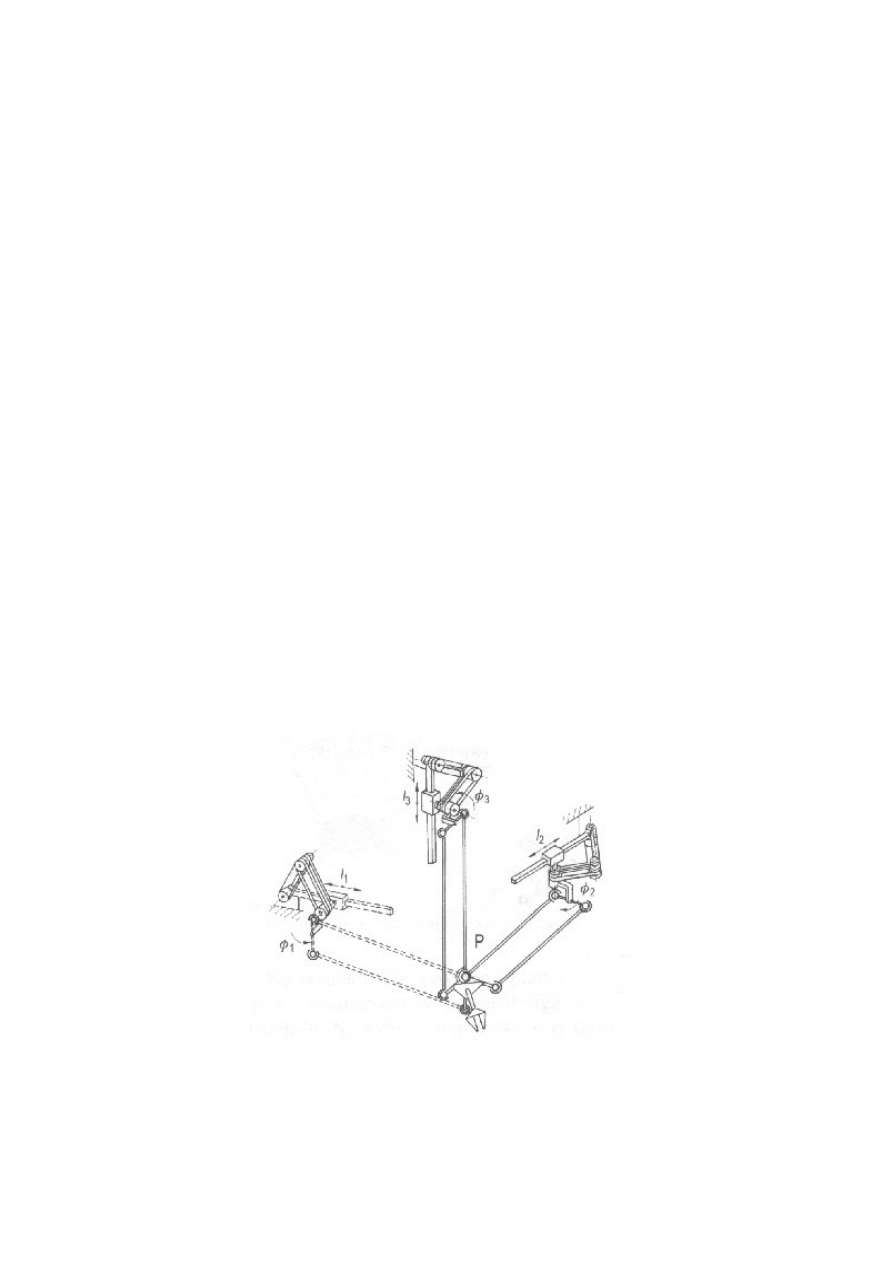
Napęd tych ruchów może być też realizowany za pomocą silników za montowanych na
wózkach l
i
lub transmitowany za pomocą mechanizmów tzw. równoległowodowych, z
silników ulokowanych na odstawie w sposób pokazany na rys. 38.
Rys. 38. Manipulator POLMAN z silnikami ulokowanymi w podstawie
7

Ruchy obrotowe elementów wejściowych mechanizmów równoległowodowych φ
i
przenoszone na mostki i przez łączniki skojarzone na platformę ruchomą manipulatora
zapewniają zmianę orientacji chwytaka w przestrzeni. Łączniki te są nazywane łącznikami
transmisji ruchów obrotowych. Wersję takiego manipulatora z dołączonymi mechanizmami
równoległowodowymi zrealizowanymi z użyciem podwójnych przekładni paskowych
zębatych o przełożeniu 1:1 pokazano na rys. 38. Zakres ruchu silników liniowych wynosi
0,2÷0,25 długości łączników, ruch obrotowy równoległowodów w zakresie +60° zapewnia
zmianę orientacji chwytaka w obrębie stożka o kącie wierzchołkowym ok. 120°.
W przypadku zastosowania liniowych silników elektrycznych mechanizm może
zapewnić wykorzystanie pełnych możliwości tych napędów, jak: krótkie stałe czasowe, brak
histerezy mechanicznej, możliwość rozwijania dużych przyśpieszeń, bardzo krótkie czasy
realizacji ruchów. Jednocześnie kompensuje się wady tych napędów, jak duża masa czy
wrażliwość na zmianę bezwładności dołączonej. Napędy ulokowane na podstawie nie
obciążają elementów ruchomych manipulatora, nie pogarszając w ten sposób jego
właściwości dynamicznych. Nie występuje problem zginania czy skręcania kabli, mogą
bowiem być na stałe związane ze stałymi, nieruchomymi fragmentami konstrukcji. Również
kabel napędu chwytaka nie podlega skręcaniu, a jedynie ograniczonemu przeginaniu.
Obecnie jednym z poważniejszych problemów badawczych podejmowanych i
rozwijanych przez wiele ośrodków na świecie są właściwości manipulacyjne robotów. W
przypadku manipulatorów równoległych mogą one dotyczyć prędkości i przyspieszeń
rozwijanych przez końcówkę manipulatora i są związane z dokładnością odtwarzania
trajektorii, sztywnością oraz możliwością oddziaływania siłowego na otoczenie, co jest bardzo
istotne dla robotów technologicznych wykorzystywanych np. w obróbce skrawaniem.
Podejmowane są również prace nad analizą manipulatorów pod kątem unikania przez
manipulator położeń osobliwych oraz analizą i syntezą mechanizmów manipulacyjnych pod
względem ich izotropowości. Dobre właściwości izotropowe są pożądane, gdy końcówka
robota stosowanego w procesach technologicznych, jak montaż lub operacje typu rapid-
prototyping, powinna poruszać się w przestrzeni z dużą prędkością i osiągać odpowiednio
dużą dokładność.
4.2.3. Manipulator równoległy typu DELTA
Klasycznym przykładem rozwiązania konstrukcyjnego manipulatorów równoległych
jest manipulator typu DELTA o strukturze 3(RRR) - rys. 39. Umożliwia on przemieszczanie
chwytaka do zadanej pozycji w trójwymiarowej przestrzeni, określonej przez trzy osie X, Y,
Z, przy czym platforma wykonuje ruchy równoległe do płaszczyzny odniesienia, ale nie może
obracać się wokół osi prostopadłej do tej płaszczyzny - osi Z.
Człon roboczy łączą z podstawą trzy identyczne kończyny składające się z dwóch
części: z ramienia obracającego się w płaszczyźnie pionowej, napędzanego przez silnik
zamocowany na podstawie i z dwóch przegubów kulistych, łączących ramię z dolnym
równoległobokiem przegubowym, który przekazuje ruch platformie.
Przemieszczenie platformy wynika ze złożenia ruchów trzech łańcuchów (kończyn).
Każdy z nich składa się z ramienia obrotowego o napędzanej osi przy podstawie i
równoległoboku przegubowego, połączonego z ramieniem i platformą. Trzy równoległoboki
zapewniają stateczność układu (trzy ruchy orientacji są wyeliminowane przez połączenie z
jedną wspólną platformą). Przeguby łączące trzy równoległoboki z platformą są usytuowane
na trzech bokach trójkąta równobocznego. Konstrukcja taka wymaga jednoczesnego ruchu
trzech silników w celu uzyskania prostoliniowego przemieszczenia platformy ruchomej, a
dodatkowo - ponieważ przyrosty przemieszczeń są zmiennymi funkcjami położenia platformy
8
i kierunku ruchu - przy stałej prędkości silników uzyskuje się zmienną prędkość ruchu
platformy.
Rys. 39. Schemat manipulatora DELTA
W manipulatorach o takiej strukturze silniki i przekładnie są zamocowane na
nieruchomej podstawie (poza przestrzenią roboczą), co nie powoduje obciążeń członów
ruchomych i nie determinuje doboru silników ze względu na ich wielkość i masę.
Rozwiązania takiego typu nie będzie dotyczyć więc problem ruchomych kabli, co ułatwia
podłączenie silników i układów sterowania. Na rys. 40 pokazano manipulator typu DELTA.
Rys. 40. Manipulator DELTA
W praktyce manipulatory typu DELTA są stosowane do manipulacji drobnymi
przedmiotami występującymi w elektronice, przemyśle farmaceutycznym i spożywczym,
zwłaszcza w środowiskach, gdzie obecność człowieka jest niepożądana.
5. Roboty i manipulatory o strukturach hybrydowych
9
Punktem wyjściowym do rozwoju hybrydowych struktur manipulatorów były zadania
wychodzące z przemysłu. Elektryczny napęd bezpośredni tworzy nowe perspektywy, ale i
nowe problemy w konstrukcji robotów. Brak luzów i małe tarcie w manipulatorach z takim
napędem umożliwia wykorzystanie ich zdeterminowanych modeli dynamicznych w układach
sterowania. Jednostki napędu bezpośredniego są jednak bardzo ciężkie, a oprócz tego między
poszczególnymi stopniami swobody występują z reguły znacznie większe sprzężenia
dynamiczne, niż w przypadku tradycyjnego napędu z reduktorami o dużym przełożeniu.
Podejmowane są próby zmniejszenia tych sprzężeń przez odpowiedni rozkład mas oraz
zdalny napęd z użyciem tzw. równoległowodów (z ang. Parallel plate driver lub parallel-link
coupling). Typowym przykładem jest robot ADEPT ONE typu SCARA z dwoma silnikami
napędu bezpośredniego, umieszczonymi na podstawie. Pierwszy człon tego manipulatora jest
napędzany bezpośrednio, a drugi za pośrednictwem taśmy stalowej spełniającej zadanie
równoległowodu o zakresie przenoszonych przemieszczeń kątowych ograniczonych do ok.
±30°. Wprowadzenie rozwiązań zapewniających nieograniczone zakresy ruchów obrotowych
w przegubach manipulatorów znacznie poprawia ich właściwości manipulacyjne.
Zwiększenie prędkości w takich manipulatorach nie wymaga stosowania skomplikowanych
zabezpieczeń i uwzględniania stref hamowania w pobliżu granic przestrzeni roboczej.
Przykładem robota o sześciu stopniach swobody i nieograniczonym zakresie ruchów
obrotowych we wszystkich przegubach jest TELBOT, w którym silniki napędowe są
umieszczone na podstawie, a transmisja napędu odbywa się za pośrednictwem wałków i
przekładni zębatych stożkowych. Manipulator ten nie ma żadnych ograniczeń konfiguracji,
ale ze względu na małą sztywność konstrukcji i skomplikowany układ przenoszenia napędu
zawierający 20 przekładni zębatych stożkowych, nie może być wykorzystywany do realizacji
szybkich i dokładnych ruchów.
5.1. Manipulator o strukturze hybrydowej PAROS-4
Przykładem robota o strukturze hybrydowej jest manipulator PAROS-4 o czterech
stopniach swobody, przeznaczony do cięcia szkła do produkcji samochodów osobowych. W
tym przypadku problem sprowadza się do odpowiedniego orientowania końcowego efektora,
którym jest koło tnące. Tak więc, dla efektora roboczego wymaga się wolnego stopnia
swobody wzdłuż osi Z, tak aby zapewnić większą swobodę ruchu do orientacji narzędzia
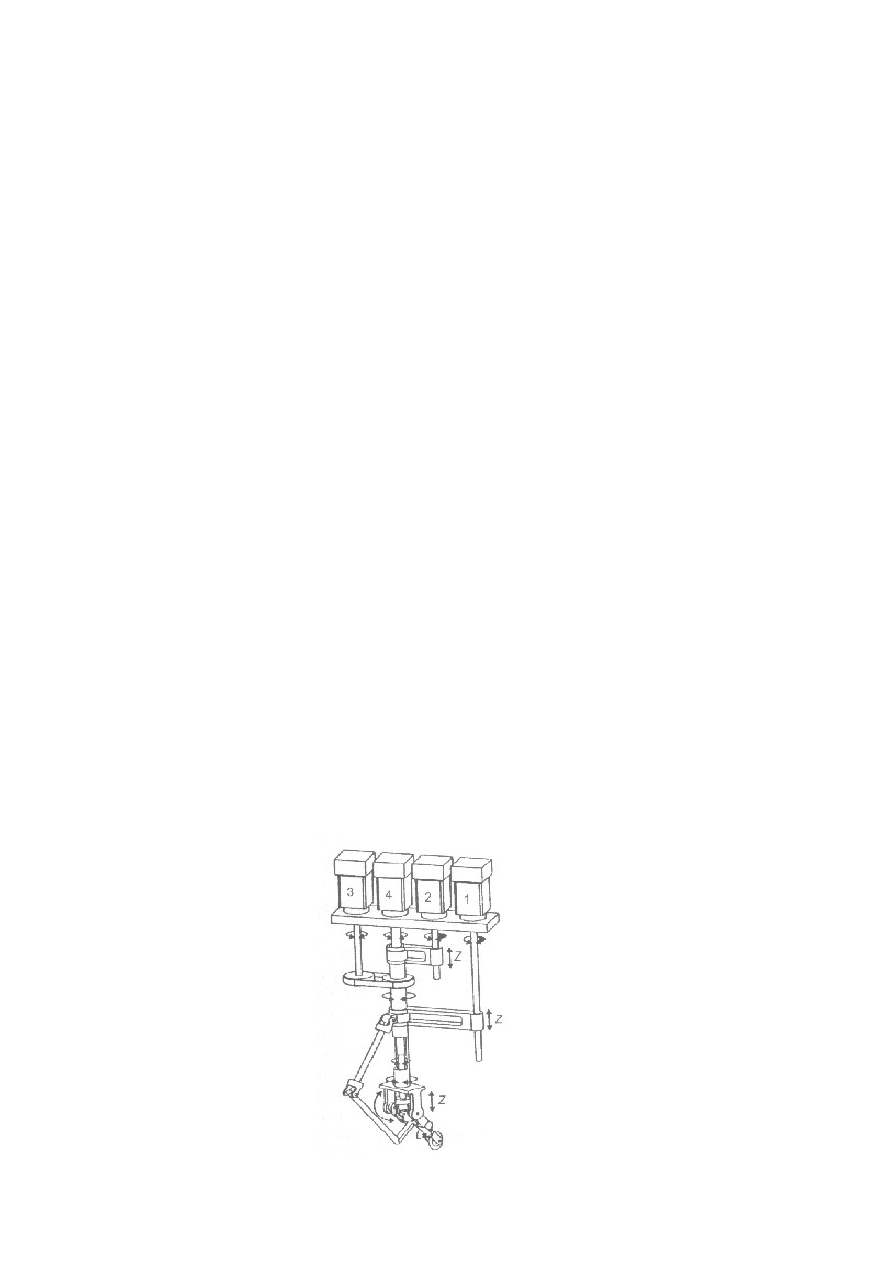
wokół tej osi. Strukturę manipulatora pokazano na rys. 41.
10
Rys. 41. Struktura manipulatora wraz z silnikami i przekładniami
Silnik nr 1 przez zamianę ruchu obrotowego na przesuwny realizuje przesuw wzdłuż osi
Z, silniki nr 2 i 4 powiązane z odpowiednimi przekładniami są odpowiedzialne za ruchy
obrotowe (rotacja bez ograniczeń), silnik nr 3, powodujący obrót całego ramienia, ma zakres
obrotu ograniczony do ok. 60°. Do obrotu wrzeciona może być zastosowany napęd
bezpośredni.
Omawiany manipulator jest wykorzystywany w obróbce szkła, gdzie współpracuje ze
specjalnie zaprojektowanym ruchomym stołem o dwóch stopniach swobody w kierunkach osi
X i Y; stół ten dodatkowo może być przechylany wokół tych osi.
Taka kombinacja hybrydowego manipulatora o czterech stopniach swobody ze stołem
ruchomym (dwa stopnie swobody) umożliwia cięcie w sześciu osiach. Możliwe jest użycie
PAROS-a 4, oprócz ciecia szkła, również do innych zadań w obszarze obróbki 6-osiowcj z
małymi siłami, jak np. obróbka miękkich materiałów czy grawerowanie.
Struktura manipulatora PAROS 4, w przeciwieństwie do konwencjonalnych
kinematycznych maszyn, jak również do całkowicie równoległych struktur, ma następujące
zalety:
dobre właściwości dynamiczne, dzięki temu, że wszystkie napędy są umieszczone na
nieruchomej górnej półce, przez co nie obciążają członów roboczych maszyny (zaleta
typowa dla struktur równoległych),
duża ruchliwość efektora,
nie występuje problem zginania czy skręcania kabli,
kompatybilna budowa, z powodu uporządkowania wszystkich napędów wzdłuż jednej
głównej osi,
nieskomplikowane sterowanie, gdyż zadanie proste i odwrotne kinematyki jest
rozwiązywalne analitycznie.
Dodatkową zaletą zastosowania takiego rozwiązania jest możliwość usunięcia
wewnętrznego łańcucha kinematycznego i przez to zredukowanie maszyny do trzech stopni
swobody. W takim przypadku wszystkie kable energetyczne i sygnałowe mogą być
poprowadzone bezpośrednio przez wnętrze manipulatora wzdłuż osi głównej, co jest dużą
zaletą w takich zadaniach, jak cięcie strumieniem wody, prowadzenie laserowe, nanoszenie
kleju lub masy uszczelniającej.
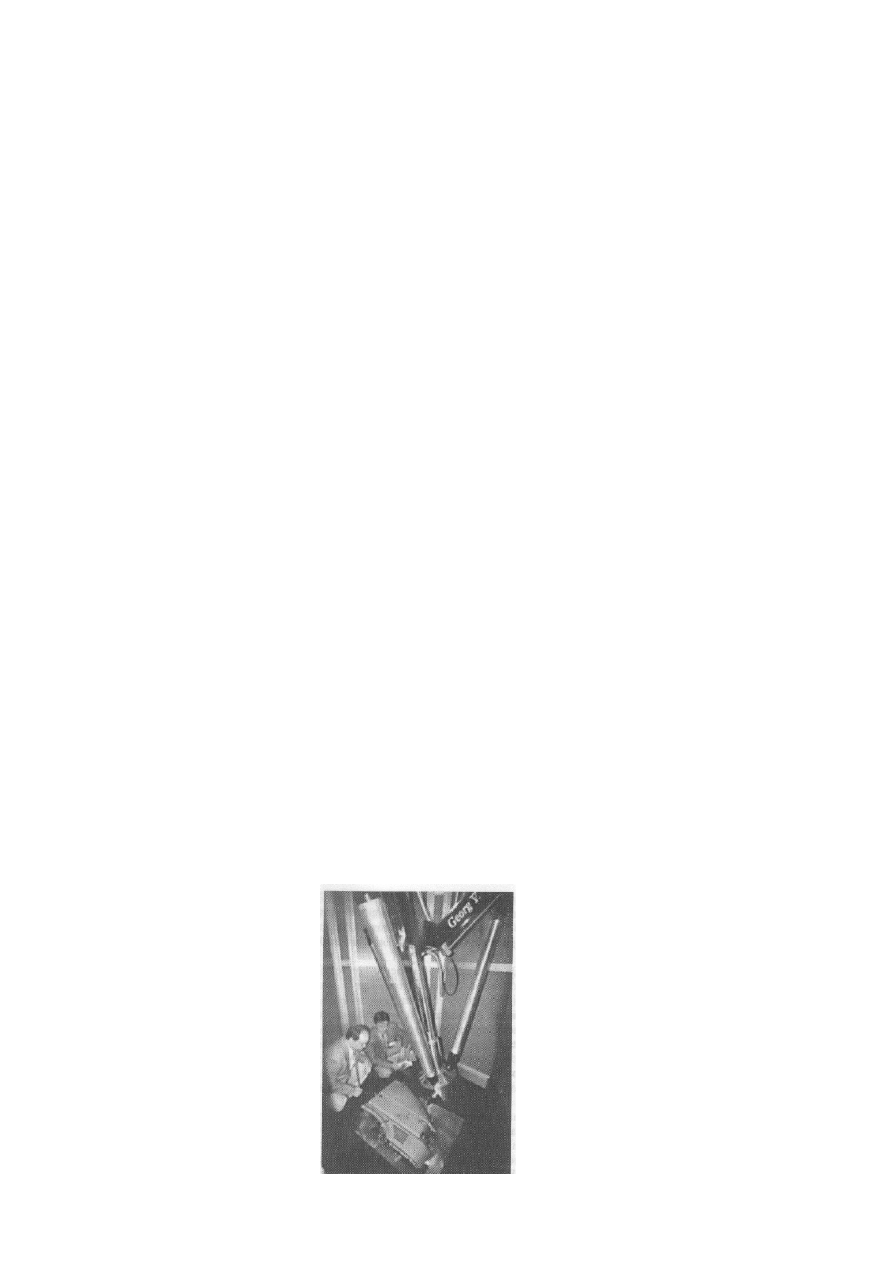
5.2. Manipulator o strukturze hybrydowej Georg V
Innym przykładem robota o strukturze hybrydowej jest manipulator typu Georg V,
przeznaczony do cięcia i spawania laserowego. Manipulator jest przedstawiony rys. 42.
11
Rys. 42. Robot o strukturze hybrydowej typu Georg V
Charakter hybrydowy maszyny ujawnia się w szeregowym połączeniu struktury tripoda
oraz dwóch napędów umieszczonych na platformie roboczej. Dodatkowe napędy
umiejscowione na platformie umożliwiają orientację efektora końcowego w przestrzeni.
Pierwszy napęd umożliwia obracanie efektora wokół osi prostopadłej do płaszczyzny
platformy o kąt 360°, drugi natomiast wokół osi prostopadłej do poprzedniej o kąt ±60°.
Zastosowanie takiej struktury łączy zalety manipulatorów o strukturach równoległych i
szeregowych, takich jak:
duża sztywność konstrukcji
oraz
dobre właściwości dynamiczne zapewnione dzięki zastosowaniu struktury tripoda,
możliwość orientacji efektora w przestrzeni dzięki zastosowaniu dodatkowych osi obrotu.
Dlatego możliwe jest użycie manipulatora Georg V do obróbki laserowej np. w
przemyśle samochodowym. Zastosowanie serwonapędów oraz wysokiej jakości sterowania
numerycznego umożliwia osiągnięcie przez efektor końcowy stosunkowo dużych
przyspieszeń i prędkości.
Literatura
Honczarenko J.: Roboty przemysłowe. Budowa i zastosowanie. WNT Warszawa, 2004.
12
Document Outline
Wyszukiwarka
Podobne podstrony:
PR ETI W 14 4 4
PR ETI W 14 6 1
PR ETI W 14 3 1
PR ETI W 2
PR ETI W 1 4
PR ETI W 1 3
PR ETI W 14 8 1
PR ETI W 1 3
PR ETI W 21 1
PR ETI W 25 6
PR ETI W 22 1
serwis pr, ETI SUM, sem 1
PR ETI W 3 1 3 3 3
PR ETI W 23 2 id 382135 Nieznany
PR ETI W 21 1
PR ETI W 11 id 382128 Nieznany
PR ETI W 14 5 1
PR ETI W 9 id 382139 Nieznany
PR ETI W 3 4 3 6
więcej podobnych podstron