Miłosz Nieduziak, Dawid Niedzień, Krystian Nytko, Szymon Olsza, Tomasz Olchawski
Sprawozdanie z Metrologii 2
ćw. 4 "Własności dynamiczne przetworników I rzędu".
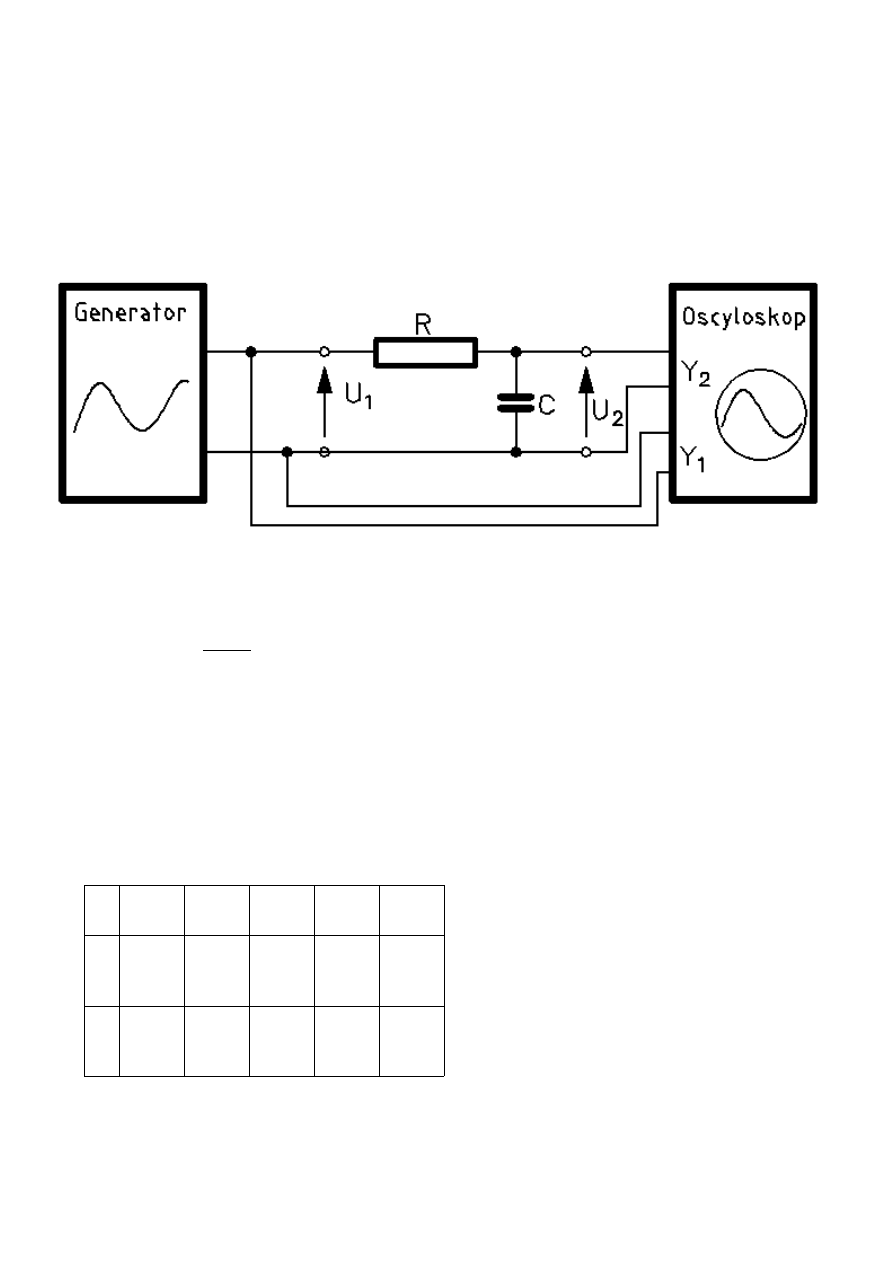
1) Schemat układu.
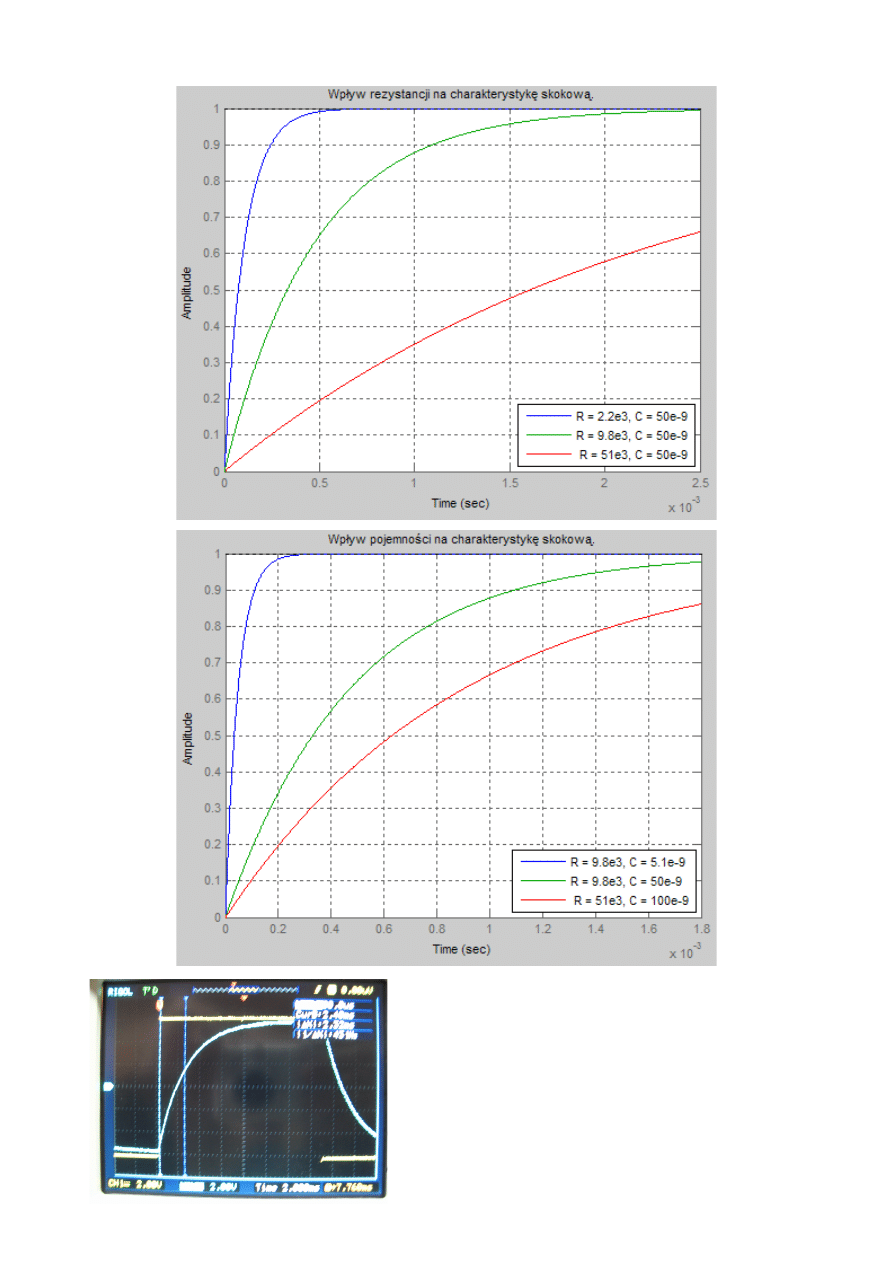
2) Wyznaczenie odpowiedzi skokowej.
Obiekt inercyjny I rzędu dany jest transmitancją:
G s =
1
T s1
Dla naszego przypadku stałą czasową można wyznaczyć z równania:
T =R⋅C
Stałą czasową można też wyznaczyć graficznie, odczytując czas dla którego sygnał osiąga
wartość 1−e
−
1
=
0.632 wartości ustalonej.
Wyniki pomiarów i obliczeń:
Lp.
R
kΩ
C
nF
T
dośw
μs
T
teoret
μs
S
1
2
3
2,2
9,8
51
50
50
50
106
476
2320
110
490
2550
1
1
1
4
5
6
9,8
9,8
9,8
5,1
50
100
48
476
912
50
490
980
1
1
1
Stała czasowa zwiększa się ze wzrostem rezystancji i ze wzrostem pojemności. Czułość
pozostaje stała, niezależnie od wartości R i C.
1/6
2/6
3) Wyznaczenie charakterystyk amplitudowo-częstotliwościowych.
Transmitancja widmowa obiektu I rzędu dana jest wzorem:
G j =
1
Tj 1
Charakterystyka amplitudowo-częstotliwościowa wyraża stosunek amplitud odpowiedzi
i wymuszenia harmonicznego i jest dana wzorem:
M =∣G j ∣=
Y
X
=
S
T
2
1
Charakterystyka logarytmiczna:
L =20⋅logM =20⋅log S −20⋅log
T
2
1[dB]
Doświadczalnie można wyznaczyć wzmocnienie sygnału mierząc amplitudy sygnału
wyjściowego i wejściowego, podzielić je przez siebie i wyliczyć z ilorazu logarytm przy podstawie
10.
3/6
f
ω
log (ω)
L(ω) = 20 log(G(ω))
[Hz]
[1/s]
-
[V]
[V]
[dB]
30
188,5
2,28
5,84
5,84
1,000
0,000
58
364,42
2,56
5,84
5,84
1,000
0,000
203
1275,49
3,11
5,84
4,88
0,836
-1,556
240
1507,96
3,18
5,84
4,64
0,795
-1,998
284
1784,42
3,25
5,84
4,32
0,740
-2,619
358
2249,38
3,35
5,84
4,13
0,740
-2,619
429
2695,49
3,43
5,84
3,84
0,707
-3,012
495
3110,18
3,49
5,84
3,52
0,603
-4,397
558
3506,02
3,54
5,84
3,12
0,534
-5,445
655
4115,49
3,61
5,84
2,96
0,507
-5,902
910
5717,7
3,76
5,84
2,56
0,438
-7,163
1998
12553,8
4,1
5,84
1,92
0,329
-9,662
21000
131946,89
5,12
5,84
0,88
0,151
-16,439
R = 9,8 kΩ, C = 50 nF
U
1
U
2
G(ω) = U
2
/U
1
f
ω
log (ω)
L(ω) = 20 log(G(ω))
[Hz]
[1/s]
-
[V]
[V]
[dB]
8
50,27
1,7
5,84
5,84
1,000
0,000
33
207,35
2,32
5,84
4,88
0,836
-1,560
44
276,46
2,44
5,84
4,48
0,767
-2,303
56
351,86
2,55
5,84
4,13
0,707
-3,012
70
439,82
2,64
5,84
3,76
0,644
-3,825
85
534,07
2,73
5,84
3,30
0,565
-4,958
98
615,75
2,79
5,84
3,10
0,531
-5,501
199
1250,35
3,1
5,84
1,60
0,274
-11,246
511
3210,71
3,51
5,84
0,64
0,110
-19,205
4000
25132,74
4,4
5,84
0,084
0,014
-36,843
R = 51kΩ, C = 50 nF
U
1
U
2
G(ω) = U
2
/U
1
4) Wyznaczenie charakterystyk fazowo-częstotliwościowych.
Dla obiektu danego wzorem : G j =
1
Tj 1
przesunięcie fazowe między sygnałami
wymuszenia i odpowiedzi określa związek:
=−
arctg T [rad ]=−arctg T ⋅
180
[
°]
Doświadczalnie można wyznaczyć przesunięcie fazowe odmierzając różnicę faz t między
sinusoidalnie zmiennymi napięciom na wyjściu i wejściu ze wzoru:
x
=
2
t
T
[
rad ]=2
t
T
180
[
°]
gdzie T – długość odcinka na ekranie odpowiadającego okresowi napięcia
t – długość odcinka odpowiadającego różnicy faz pomiędzy napięciami
4/6
f
ω
log (ω)
T
t
φ
[Hz]
[1/s]
-
[ms]
[ms]
8
50,27
1,7
125,00
0,00
0,000
33
207,35
2,32
30,30
2,40
-28,512
44
276,46
2,44
22,73
3,00
-47,520
56
351,86
2,55
17,86
2,40
-48,384
70
439,82
2,64
14,29
1,92
-48,384
85
534,07
2,73
11,76
1,84
-56,304
98
615,75
2,79
10,20
1,68
-59,270
199
1250,35
3,1
5,03
1,04
-74,506
511
3210,71
3,51
1,96
0,41
-75,424
4000
25132,74
4,4
0,25
0,065
-93,600
R = 51kΩ, C = 50 nF
[°]
f
ω
log (ω)
T
t
φ
[Hz]
[1/s]
-
[ms]
[ms]
30
188,5
2,28
33,33
0
0,000
58
364,42
2,56
17,24
0
0,000
203
1275,49
3,11
4,93
0,48
-35,078
240
1507,96
3,18
4,17
0,4
-34,560
284
1784,42
3,25
3,52
0,42
-42,941
313
1966,64
3,29
3,19
0,38
-42,818
358
2249,38
3,35
2,79
0,38
-48,974
429
2695,49
3,43
2,33
0,36
-55,598
495
3110,18
3,49
2,02
0,32
-57,024
558
3506,02
3,54
1,79
0,3
-60,264
655
4115,49
3,61
1,53
0,28
-66,024
910
5717,7
3,76
1,10
0,216
-70,762
1998
12553,8
4,1
0,50
0,112
-80,559
21000
131946,89
5,12
0,05
0,014
-105,840
R = 9,8 kΩ, C = 50 nF
[°]
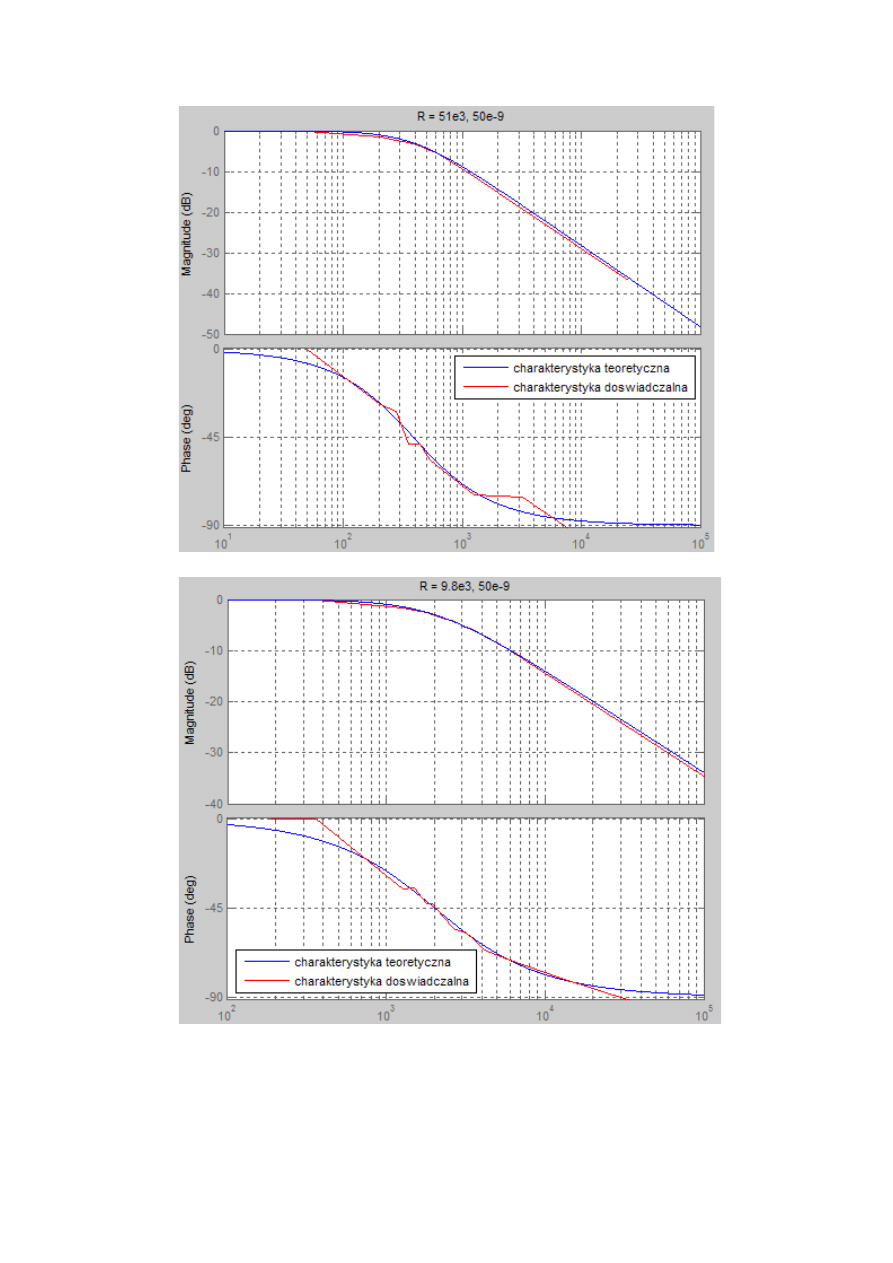
Wzrost częstotliwości sygnału wymuszenia obniża wzmocnienie oraz zwiększa opóźnienie
fazowe odpowiedzi.
5/6
Znając częstotliwość graniczną dla obu badanych przypadków można obliczyć stałą czasową
przetwornika i porównać ją z wynikami uzyskanymi wcześniej:
gr
=
2 f
gr
=
1
T
Częstotliwość graniczną odczytano w momencie, gdy sygnał wyjściowy osiąga wartość
1/
2 wartości sygnału wejściowego.
6/6
Dane przetwornika
R
C
nF
[ms]
[ms]
[ms]
51
50
2,550
2,320
2,840
9,8
50
0,490
0,476
0,508
T
teoretyczne
T
doswiadczenie 1
T
doświadczenie 2
kΩ
Document Outline
Wyszukiwarka
Podobne podstrony:
metr spr 5
metr spr 3 id 296866 Nieznany
metr spr 1
metr 7 spr
metr spr 2
metr spr 5
metr 4 spr
metr spr 4
metr 8 spr
metr 9 spr
metr 2 spr
metr 3 spr
metr spr 5
metr spr 3 id 296866 Nieznany
metr spr 1
metr 7 spr
metr 8 spr
więcej podobnych podstron