1
Politechnika Lubelska
Katedra Automatyki i Metrologii
Laboratorium
Podstaw Automatyki i
Regulacji Automatycznej
EZ
Ć
wiczenie nr
1
Temat:
Identyfikacja obiektów sterowania
Lublin 2006
2
Identyfikacja obiektów sterowania
1.1.
Wstęp
Znajomość właściwości obiektu sterowania jest warunkiem koniecznym poprawnego
zaprojektowania układu regulacji automatycznej. Właściwości obiektu regulacji przedstawiane
są w postaci opisu matematycznego tego obiektu (modelu matematycznego). Odpowiednio duża
ilość informacji o obiekcie (znajomość dokładnego modelu matematycznego procesu
regulowanego) umożliwia właściwe zaprojektowanie układu automatycznej regulacji (UAR) a
co za tym idzie, uzyskanie dobrej jakości regulacji. W praktyce proces projektowania układów
sterowania rozpoczyna się od identyfikacji obiektu sterowanego.
Przez pojęcie identyfikacji rozumie się proces tworzenia modelu matematycznego obiektu
sterowania, właściwego z punktu widzenia celu tego sterowania, na podstawie badań
(eksperymentów). Model matematyczny może opisywać właściwości statyczne obiektu (w stanie
ustalonym). Jest on wtedy podawany w postaci zależności wyjście-wejście lub charakterystyk
statycznych. Model matematyczny może również opisywać własności dynamiczne (dynamikę
obiektu – stan przejściowy). Jest on wtedy podawany w postaci równań różniczkowych,
różnicowych, transmitancji, charakterystyk dynamicznych itp.
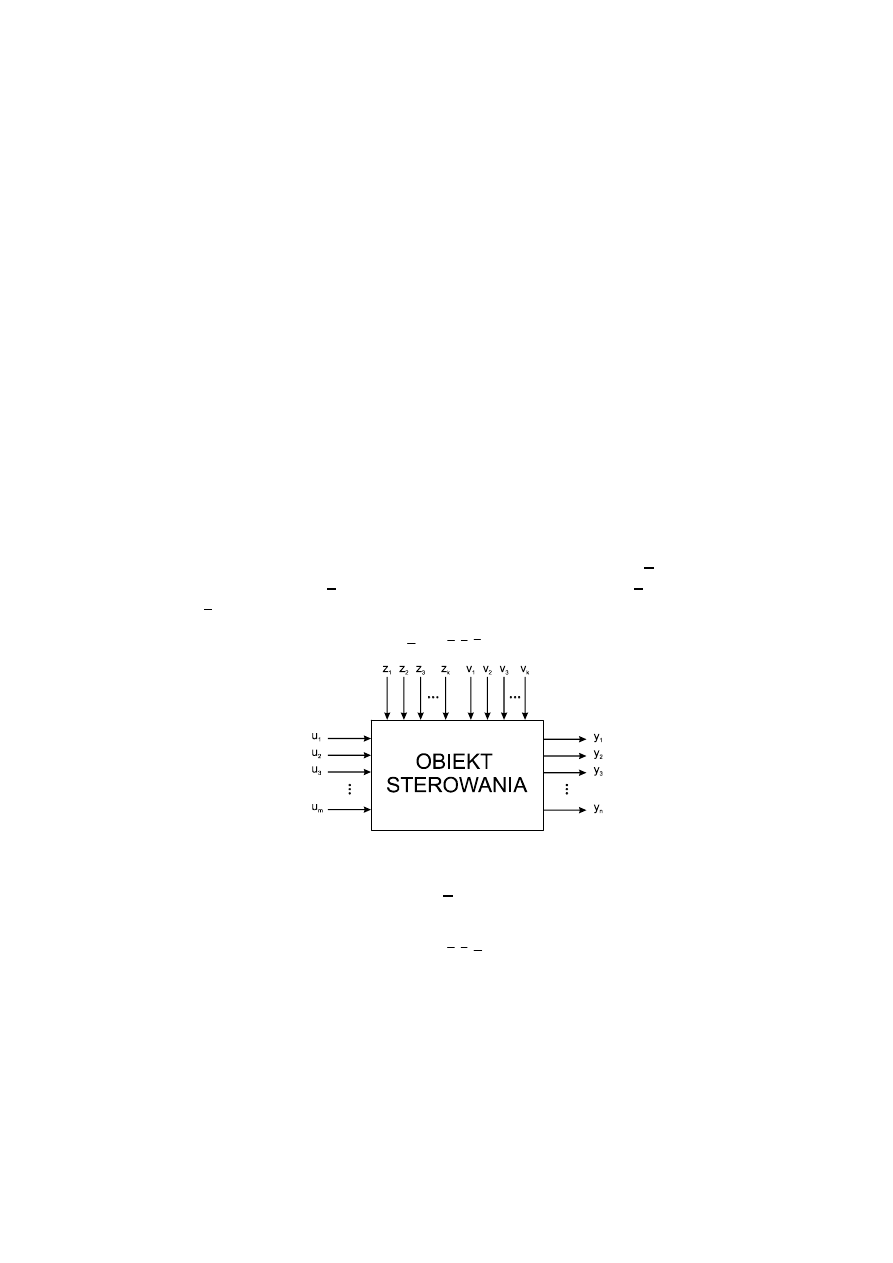
Rzeczywiste obiekty sterowania są często obiektami wielowymiarowymi (złożonymi) tzn.
posiadającymi wiele wejść i wyjść np. procesy syntez chemicznych, produkcji cukru i klinkieru,
procesy mieszania, rozdrabniania, wytwarzania pary w kotłach energetycznych, itp. W złożonym
obiekcie sterowania można wyróżnić następujące sygnały (rys. 1.1) : u – wektor sygnałów
sterujących (wejściowych), y – wektor sygnałów wyjściowych, v – wektor zakłóceń
mierzalnych, z – wektor zakłóceń niemierzalnych. Sygnały te powiązane są równaniem:
)
,
,
(
z
v
u
f
y
=
(1.1)
Rys. 1.1. Schemat blokowy wielowymiarowego obiektu sterowania
Celem sterowania jest wytworzenie sygnału u takiego, który zapewni osiągnięcie ekstremum
techniczno-ekonomicznego wskaźnika jakości Q:
)
,
,
(
y
v
u
f
Q
=
(1.2)
Wskaźnik jakości (funkcja celu) jest funkcjonałem mierzalnych sygnałów wejściowych i
wyjściowych. Identyfikacja obiektu złożonego sprowadza się do wyznaczenia zależności (1.1)
oraz (1.2).
1.2.
Modele matematyczne członów dynamicznych
Modele parametryczne ciągłych układów automatyki stanowią: równanie różniczkowe i
transmitancja. Do modeli nieparametrycznych należą tutaj: charakterystyki czasowe i
częstotliwościowe.
3
1.2.1
Równanie różniczkowe
Równania różniczkowe stanowią podstawową formę wyrażania dynamicznych i statycznych
właściwości układów. Przedstawiają one zależności występujące pomiędzy sygnałem
wejściowym u(t) i wyjściowym y(t) obiektu:
)
,...,
,
,
,
,...,
,
,
(
)
(
)
2
(
)
1
(
)
(
)
2
(
)
1
(
)
(
n
m
n
y
y
y
y
u
u
u
u
f
y
=
(1.3)
lub dla przypadku obiektu liniowego:
m
n
u
B
y
A
m
k
k
k
n
k
k
k
≥
⋅
=
⋅
∑
∑
=
=
,
0
)
(
0
)
(
(1.4)
gdzie: A
k
, B
k
- stałe współczynniki; y
(k)
, u
(k)
– pochodne k-tego rzędu sygnałów wyjściowego i
wejściowego.
W odniesieniu do rzeczywistych obiektów przemysłowych równania te są najczęściej
nieliniowymi. Dla przypadku niewielkich zmian sygnałów występujących w modelu w otoczeniu
punktu pracy dokonuje się linearyzacji równań poprzez rozwinięcie w szereg Tylora.
1.2.2.
Transmitancja operatorowa
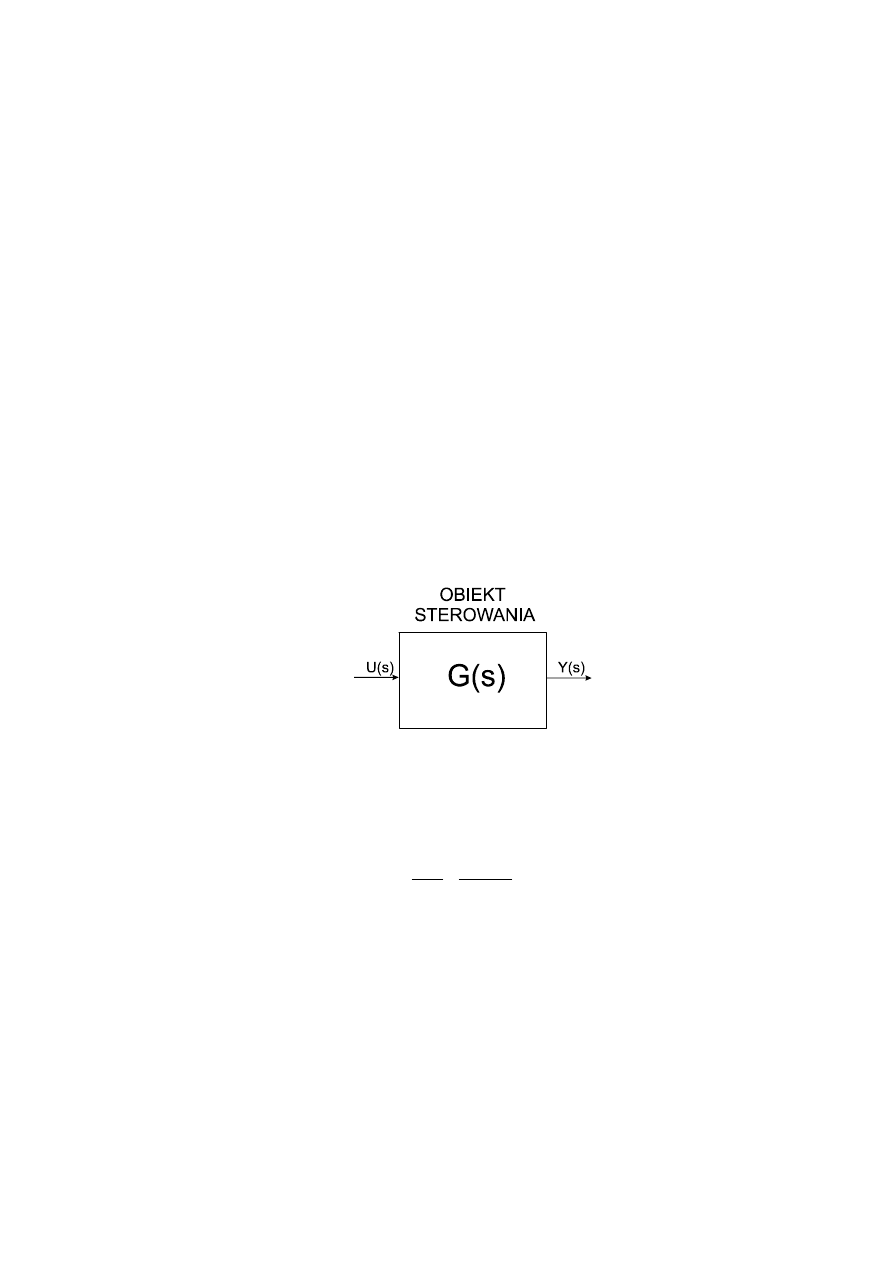
Jednym z podstawowych pojęć w automatyce jest transmitancja (funkcja przejścia). Dla
jednowymiarowego, liniowego i stacjonarnego obiektu sterowania (patrz rys. 1.2) transmitancję
operatorową G(s) tego obiektu stanowi stosunek transformaty Laplace’a sygnału wyjściowego
Y(s) do transformaty sygnału wejściowego U(s) przy zerowych warunkach początkowych.
Rys. 1.2. Schemat blokowy jednowymiarowego obiektu sterowania
Dokonując obustronnego przekształcenia Laplace'a równania różniczkowego (1.4)
opisującego obiekt sterowania (przy założeniu zerowych warunków początkowych), otrzymuje
się następującą postać transmitancji operatorowej tego obiektu :
k
n
k
k
k
m
k
k
s
A
s
B
s
U
s
Y
s
G
∑
∑
=
=
=
=
0
0
)
(
)
(
)
(
(1.5)
Transmitancja operatorowa jest wielkością zespoloną zależną wyłącznie od parametrów
układu i zmiennej zespolonej s.
Wprowadzenie pojęcia transmitancji operatorowej nadaje matematyczny sens schematom
blokowym, gdyż blok z wpisaną postacią transmitancji, przedstawia mnożenie operatorowego
sygnału wejściowego przez transmitancję elementu (obiektu).
W układach wielowymiarowych wpływ każdego z sygnałów wejściowych na wybrany
sygnał wyjściowy wyraża inna transmitancja.
1.2.3.
Charakterystyki czasowe
Największe zastosowanie do opisu właściwości dynamicznych w dziedzinie czasu znalazły
charakterystyki czasowe, określające zachowanie się układu i jego elementów w stanie
4
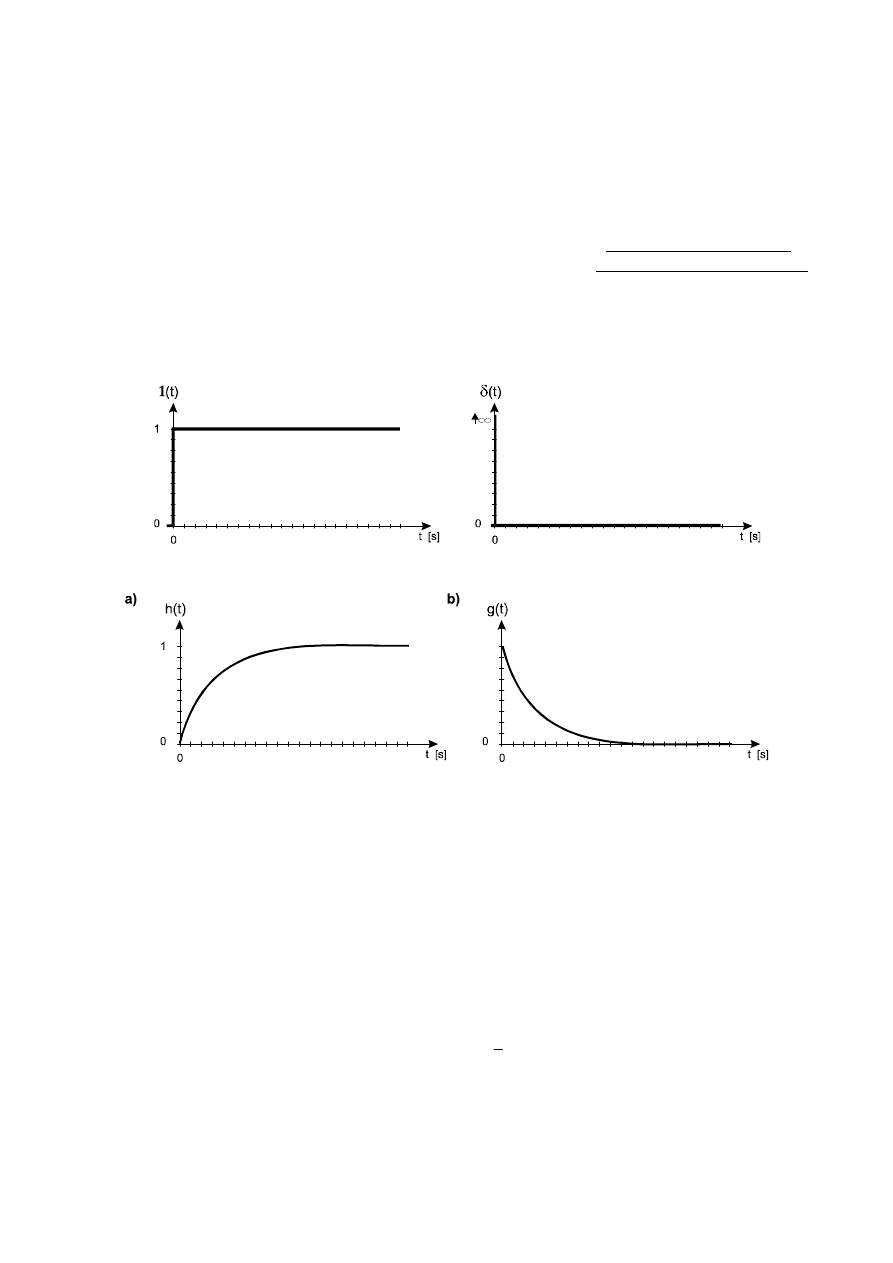
przejściowym (nieustalonym). Stanowią je wykresy przedstawiające zależności sygnału
wyjściowego od czasu, otrzymane po wprowadzeniu na wejście standardowego sygnału
wymuszającego. Najczęściej wykorzystuje się wymuszenie w postaci skoku jednostkowego
u(t)=1(t) (patrz rys. 1.3):
1(t)
≥
<
=
0
1
0
0
t
dla
t
dla
(1.6)
Charakterystykę otrzymaną dla tego typu wymuszenia nazywa się charakterystyką skokową, i
oznacza h(t). W rozważaniach teoretycznych często używa się charakterystyk impulsowych
(oznaczenie g(t)). Takie charakterystyki są reakcją członu lub układu dynamicznego na sygnał
pobudzający będący impulsem Diraca u(t)=
)
(t
δ
(patrz rys. 1.4):
≠
=
∞
+
=
0
0
0
)
(
t
dla
t
dla
t
δ
(1.7)
Rys. 1.3. Skok jednostkowy. Rys. 1.4. Impuls Diraca.
Rys. 1.5. Przykładowe charakterystyki czasowe: a) skokowa; b) impulsowa
Charakterystyki skokowe i inne odpowiedzi, będące reakcją na łatwo generowalne
pobudzenia, można w prosty sposób wyznaczyć doświadczalnie (pomierzyć lub zarejestrować).
Reakcję członu dynamicznych na dowolne wymuszenia można natomiast obliczyć znając jego
model wejściowo - wyjściowy (transmitancję) oraz transformaty Laplace,a wymuszeń. Z
definicji transmitancji operatorowej członu dynamicznego wynika bowiem zależność (1.8) na
transformatę szukanej odpowiedzi na sygnał wymuszający, którego transformata jest znana i
wynosi U(s).
)
(
)
(
)
(
s
G
s
U
s
Y
⋅
=
(1.8)
Dla charakterystyki skokowej:
[ ]
s
L
s
U
1
1(t)
)
(
=
=
(1.9)
a dla charakterystyki impulsowej:
[
]
1
(t)
)
(
=
=
δ
L
s
U
(1.10)
5
Z teoretycznego punktu widzenia ważne jest to, że transmitancję operatorową G(s) można
uważać za operatorową postać charakterystyki impulsowej:
[
]
)
(
)
(
)
(
)
(
1
)
(
1
s
G
L
t
g
s
G
s
G
s
Y
−
=
⇒
=
⋅
=
(1.11)
Ponieważ:
)
(
)
(
)
(
1
)
(
s
sH
s
G
s
G
s
s
H
=
→
=
(1.12)
to otrzymamy wzór opisujący zależność pomiędzy charakterystyką skokową i impulsową:
t
t
h
t
g
d
)
(
d
)
(
=
(1.13)
W odniesieniu do układów liniowych charakterystyki czasowe jednoznacznie określają ich
właściwości dynamiczne (znając odpowiednią charakterystykę czasową można obliczyć
odpowiedź na dowolne wymuszenie). W układach nieliniowych, w których nie jest spełniona
zasada superpozycji i przebieg charakterystyk czasowych zależy nie tylko od rodzaju
wymuszenia lecz również od jego wartości, charakterystyki czasowe nie określają całkowicie ich
właściwości dynamicznych.
1.2.4.
Charakterystyki częstotliwościowe
Charakterystyki częstotliwościowe przedstawiają reakcję członu dynamicznego na
wymuszenie harmoniczne. Z doświadczeń eksperymentalnych wiadomo, iż jeżeli na wejście
członu liniowego wprowadzi się sygnał harmoniczny:
)
sin(
)
(
t
A
t
u
ω
⋅
=
,
(1.14)
to po dostatecznie długim czasie zanikną składowe przejściowe i na wyjściu członu ustali się
również sygnał harmoniczny:
)
sin(
)
(
Φ
+
⋅
=
t
B
t
y
ω
,
(1.15)
tzn. sygnał o takiej samej pulsacji ale różnej („zniekształconej”) amplitudzie i fazie. Stosunek
amplitud B/A oraz przesunięcie fazowe pomiędzy sygnałami
Φ
zależą od pulsacji
ω
w różny
sposób - w zależności od właściwości filtrujących (dynamicznych) badanego członu. Można
powiedzieć, że człon przenosząc harmoniczny sygnał wejściowy na swoje wyjście zmienia jego
amplitudę oraz powoduje jego przesunięcie w czasie.
Właściwości dynamiczne członów w dziedzinie częstotliwości określają różnorodne
charakterystyki częstotliwościowe, które można wyznaczać doświadczalnie lub teoretycznie
z transmitancji
widmowej.
Dzięki
istniejącym
związkom
pomiędzy
doświadczalnie
pomierzonymi parametrami sygnałów harmonicznych na wejściu i wyjściu badanego członu
(czyli tworzącym dla pulsacji jako zmiennej niezależnej - charakterystyki częstotliwościowe), a
jego transmitancją widmową (również operatorową i idąc dalej równaniem różniczkowym),
transmitancja widmowa posiada głęboki -co zostanie pokazane - sens fizyczny.
Transmitancję widmową można otrzymać z transmitancji operatorowej przez formalne
podstawienie za operator s pulsacji urojonej j
ω
. Takie podstawienie zakłada ograniczenie
wymuszeń tylko do sygnałów harmonicznych (z płaszczyzny zespolonej s wybiera się tylko oś
urojonych). Transmitancja widmowa jest formalnie definiowana (1.16) jako funkcja zespolona,
będąca stosunkiem symbolicznych (zespolonych) wartości sygnałów wyjściowego i
wejściowego, przy zerowych warunkach początkowych.
)
(
)
(
)
(
^
^
ω
ω
ω
j
U
j
Y
U
Y
j
G
=
=
(1.16)
6
Jak wiadomo, stosunek transformat Fouriera sygnału wyjściowego i wejściowego stanowi
również wyrażenie, określające transmitancję zwaną transmitancją widmową (transformata
Fouriera określa widmo sygnału - stąd nazwa), i dlatego pomimo pewnych nieścisłości
matematycznych często transmitancja widmowa definiowana jest za pomocą formalizmu
przekształcenia Fouriera.
Ze związków pomiędzy rozwiązaniem równania różniczkowego (1.4) dla wymuszeń
harmonicznych członu, a parametrami sygnałów (wejściowego i wyjściowego) oraz z
właściwości funkcji zespolonych można napisać:
)
(
arg
)
(
)
(
)
(
)
(
Im
)
(
Re
)
(
)
(
ω
ω
ω
ω
ω
ω
ω
ω
ω
j
G
j
j
j
t
j
t
j
e
j
G
j
G
j
j
G
e
j
G
e
A
B
e
A
e
B
j
G
⋅
=
+
=
⋅
=
=
⋅
⋅
=
Φ
Φ
Φ
+
(1.17)
Z zależności (1.17) wynikają następujące związki:
- moduł transmitancji widmowej jest stosunkiem amplitud sygnałów tj. wzmocnieniem
względnym członu:
)
(
)
(
.
ω
ω
K
A
B
j
G
oznacz
=
=
(1.18)
[
] [
]
)
(
)
(
)
(
Im
)
(
Re
)
(
2
2
.
2
2
ω
ω
ω
ω
ω
Q
P
j
G
j
G
j
G
oznacz
+
=
+
=
(1.19)
gdzie:
)
(
sin
)
(
)
(
),
(
cos
)
(
)
(
ω
ω
ω
ω
ω
ω
Φ
=
Φ
=
K
Q
K
P
(1.20)
- argument transmitancji widmowej odpowiada przesunięciu fazowemu między tymi sygnałami.
)
(
)
(
tg
)]
(
[
Re
)]
(
[
Im
tg
)
(
)
(
arg
ω
ω
ω
ω
ω
ω
P
Q
arc
j
G
j
G
arc
j
G
=
=
Φ
=
(1.21)
Powyższe zależności (od 1.18 do 1.21) oprócz tego, że podają interpretację fizyczną
charakterystyk częstotliwościowych to służą również do ich wykreślania na podstawie znanego
modelu (równania różniczkowego lub transmitancji).
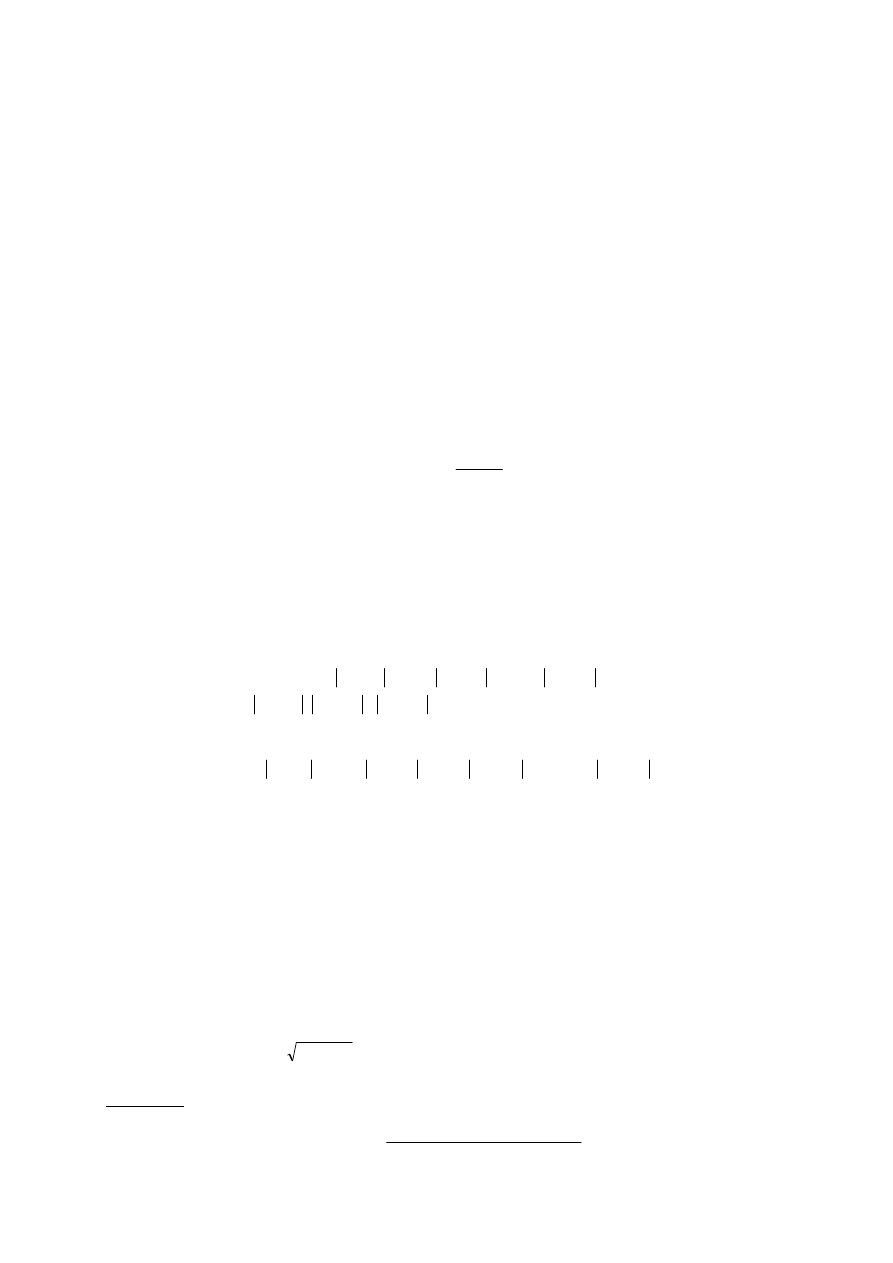
Do najczęściej stosowanych typów charakterystyk częstotliwościowych należą:
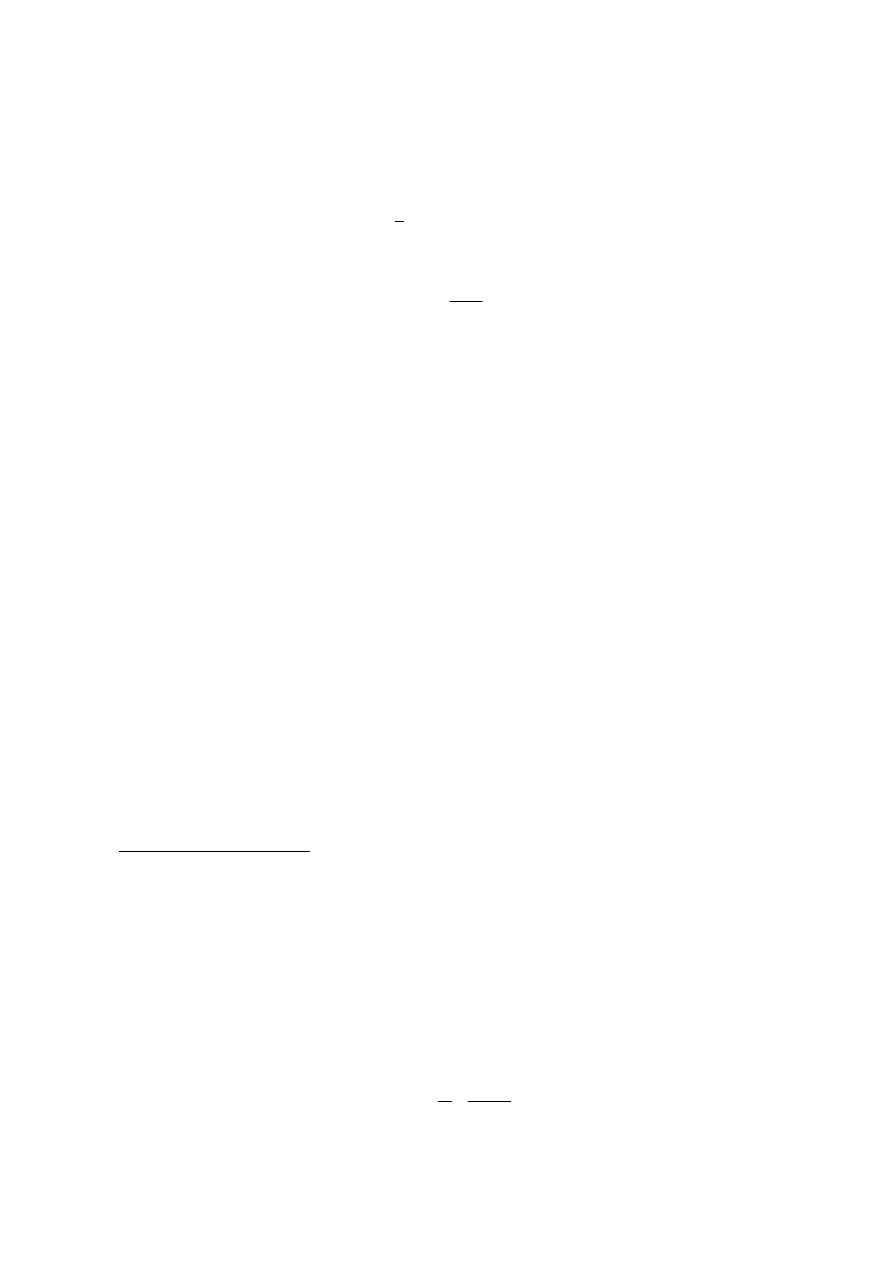
a) charakterystyki amplitudowo-fazowe
Wykres transmitancji widmowej G(j
ω
) sporządzony na płaszczyźnie liczb zespolonych
(P(
ω
), Q(
ω
)), we współrzędnych biegunowych, nazywamy charakterystyką amplitudowo-fazową
lub charakterystyką Nyquista. Długość wektora łączącego początek układu współrzędnych
z punktem charakterystyki przypisanym danej pulsacji reprezentuje stosunek amplitud sygnałów:
wyjściowego do wejściowego członu, a kąt jaki tworzy wektor z osią liczb rzeczywistych
przedstawia przesunięcie fazowe między tymi sygnałami.
ϕ
ω=0
ω
1
ω
2
ω
n
P
(ω
2
)
Q
(ω
2
)
ω
3
|
G
(
j
ω)|
P
(ω )
Q
(ω )
ω
=
∞
a)
10
3
log
ω
ωω
ω
ω
ωω
ω
-1
0
1
2
3
4
0,1
1
10
2
10
4
+40
+20
-20
-40
Dekada
||||
K
| | | |
Lm[dB]=20log
||||
G(j
ω
ωω
ω
)
||||
-2
0d
B
/d
ek
T
1
b)
T
1
log
ω
ωω
ω
ω
ωω
ω
-1
0
1
2
3
4
0,1
1
10
2
10
3
10
4
ch. rzeczywista
ch. asymptotyczna
4
π
−
4
π
+
2
π
−
7
Rys. 1.6 Przykład charakterystyki Rys. 1.7. Przykład charakterystyk logarytmicznych:
amplitudowo-fazowej a) amplitudowej; b) fazowej
Położenie poszczególnych punktów charakterystyki zależy od pulsacji. Przy jej zmianie od
zera do nieskończoności poszczególne punkty charakterystyki przesuwają się do początku
układu współrzędnych. Związane jest to z faktem, iż żaden punkt materialny nie jest zdolny do
wykonywania drgań z nieskończenie wielką częstotliwością. Przykład takiej charakterystyki
podano na rys. 1.6.
b) logarytmiczne charakterystyki częstotliwościowe
Często dla wygody charakterystykę Nyquista przedstawia się w postaci tzw. charakterystyk
Bodego, tzn. w postaci charakterystyk logarytmicznych (rys. 1.7):
amplitudy
L
G j
m
(
)
log
(
)
ω
ω
=
20
(1.22)
i fazy
Φ
(
)
ω
(1.23)
Charakterystykę amplitudową wykreśla się w skali logarytmicznej zarówno dla pulsacji jak i
dla wartości modułu. Wprowadza się przy tym pojęcia:
−
modułu logarytmicznego L
m.
(patrz wzór (1.22)), którego jednostką jest decybel [dB]
np. |G(j
ω
)| = 10 to L
m.
(
ω
) = 20log 10 =20 [dB] , jeśli |G(j
ω
)| =1 to L
m.
(
ω
) = 0 [dB] itd.,
−
dekady; jako przedziału pulsacji od
ω
i
do 10
ω
i
,
−
oktawy; jako przedziału pulsacji od
ω
i
do 2
ω
i
,
−
nachylenia charakterystyki; mierzonego w dB/dekadę lub dB/oktawę
Często dla uproszczenia charakterystyki logarytmiczne przedstawia się w postaci tzw.
charakterystyk asymptotycznych (patrz rys. 1.7) stanowiących ich liniową aproksymację.
1.3.
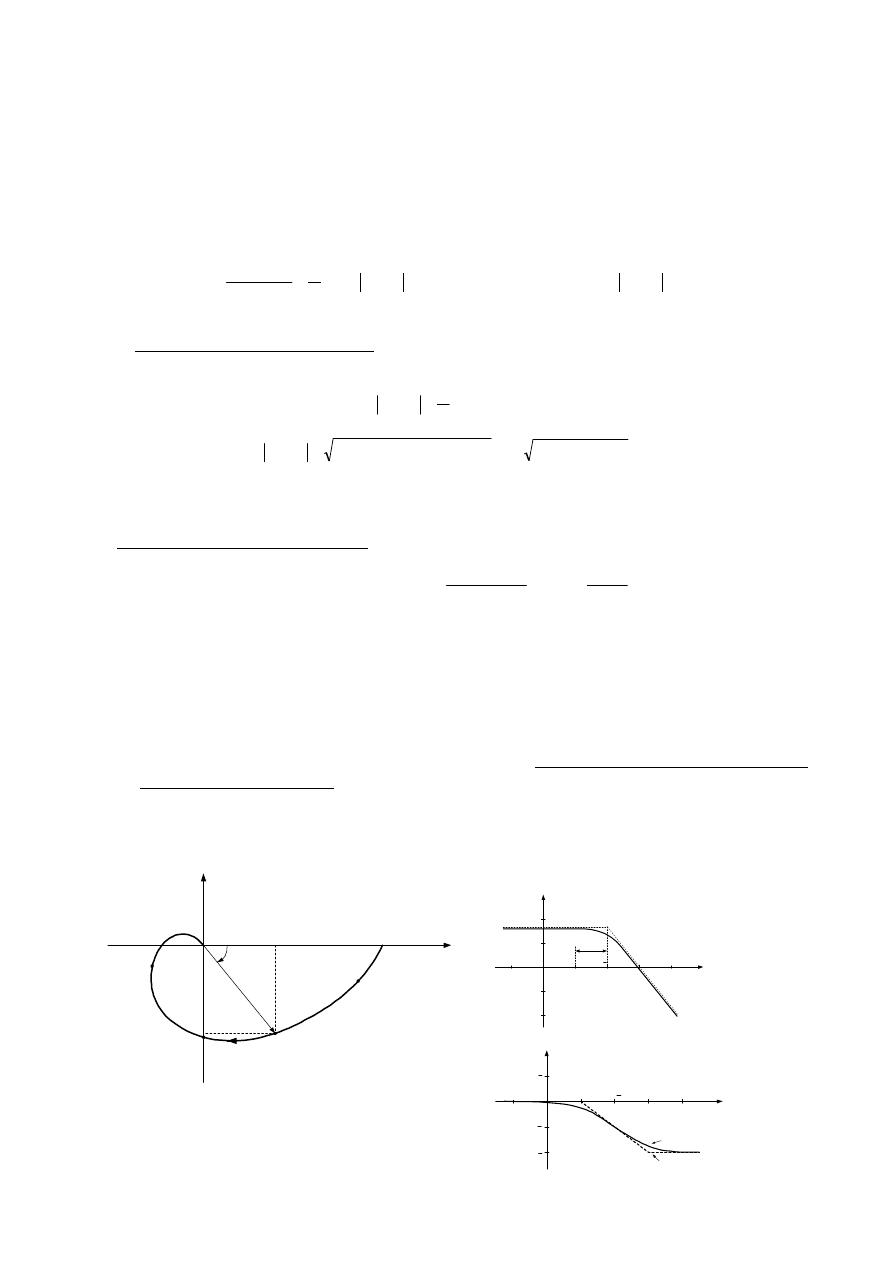
Podstawowe człony dynamiczne
a) Człon inercyjny I-go rzędu
Człon opisany równaniem różniczkowym postaci:
u
k
y
y
T
⋅
=
+
⋅
&
(1.24)
o transmitancji operatorowej:
1
)
(
)
(
)
(
+
=
=
Ts
k
s
U
s
Y
s
G
(1.25)
nazywany jest członem inercyjnym pierwszego rzędu. Parametrami tego członu są stałe
współczynniki transmitancji: T-stała czasowa, mająca wymiar czasu oraz k-współczynnik
wzmocnienia.
Rys. 1.8. Charakterystyki członu inercyjnego pierwszego rzędu: a) skokowa; b)amplitudowo-fazowa, c)
Bodego
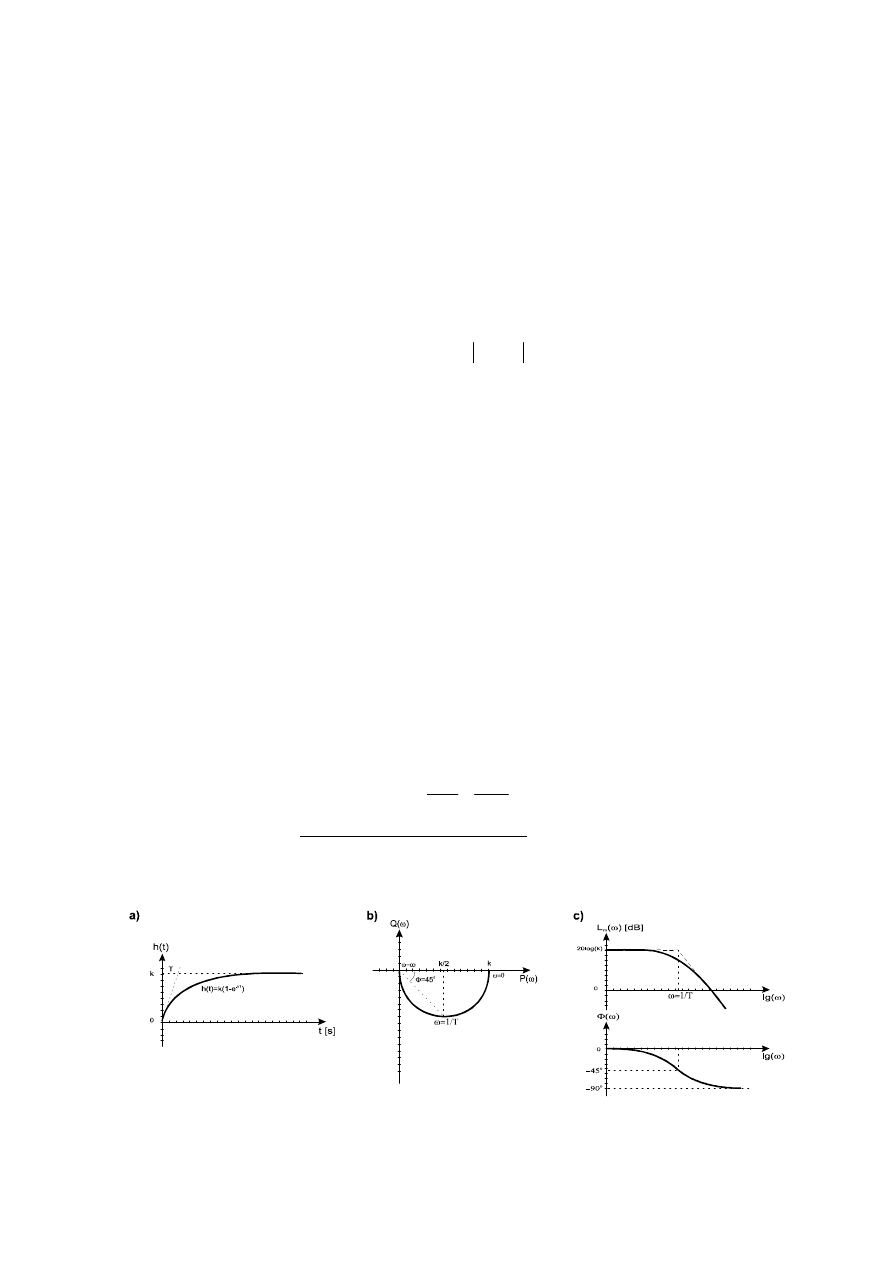
Przykładem członu inercyjnego I-go rzędu jest czwórnik RC (rys. 1.9):
8
Rys. 1.9. Czwórnik RC
b) Człon całkujący (rzeczywisty)
Człon opisany równaniem różniczkowym postaci:
u
k
y
y
T
⋅
=
+
⋅
&
&
&
(1.26)
o transmitancji operatorowej:
)
1
(
)
(
)
(
)
(
+
=
=
Ts
s
k
s
U
s
Y
s
G
(1.27)
nazywany jest rzeczywistym członem całkującym (z inercją). Parametrami tego członu są stałe
współczynniki transmitancji: k-współczynnik wzmocnienia prędkościowego oraz T-stała
czasowa, mająca wymiar czasu.
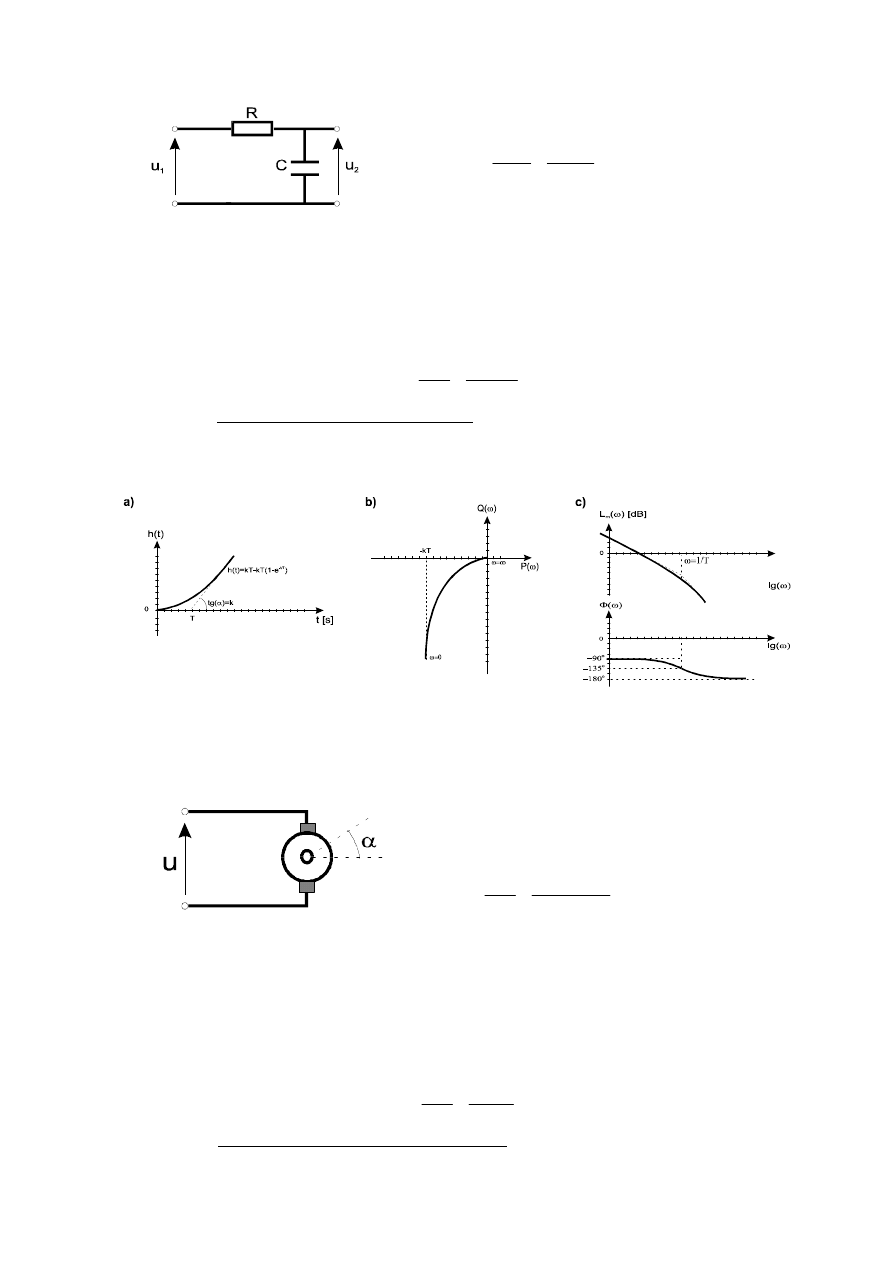
Rys. 1.10. Charakterystyki rzeczywistego członu całkującego: a) skokowa; b)amplitudowo-fazowa, c)
Bodego
Przykładem członu całkującego z inercją jest obcowzbudny silnik prądu stałego (patrz rys.
1.11) o pomijalnie małej indukcyjności twornika:
Rys. 1.11. Obcowzbudny silnik prądu stałego
c) Człon różniczkujący (rzeczywisty)
Człon opisany równaniem różniczkowym postaci:
u
k
y
y
T
&
&
⋅
=
+
⋅
(1.28)
o transmitancji operatorowej:
)
1
(
)
(
)
(
)
(
+
=
=
Ts
ks
s
U
s
Y
s
G
(1.29)
nazywany jest rzeczywistym członem różniczkującym (z inercją). Parametrami tego członu są
sRC
s
U
s
U
s
G
+
=
=
1
1
)
(
)
(
)
(
1
2
R- rezystancja twornika
J – moment bezwładności wirnika
α
- kąt położenia wirnika
)
/
1
(
)
(
)
(
)
(
c
sRJ
s
k
s
s
U
s
G
+
=
Α
=
9
stałe współczynniki transmitancji: k-współczynnik wzmocnienia oraz T-stała czasowa, mająca
wymiar czasu.
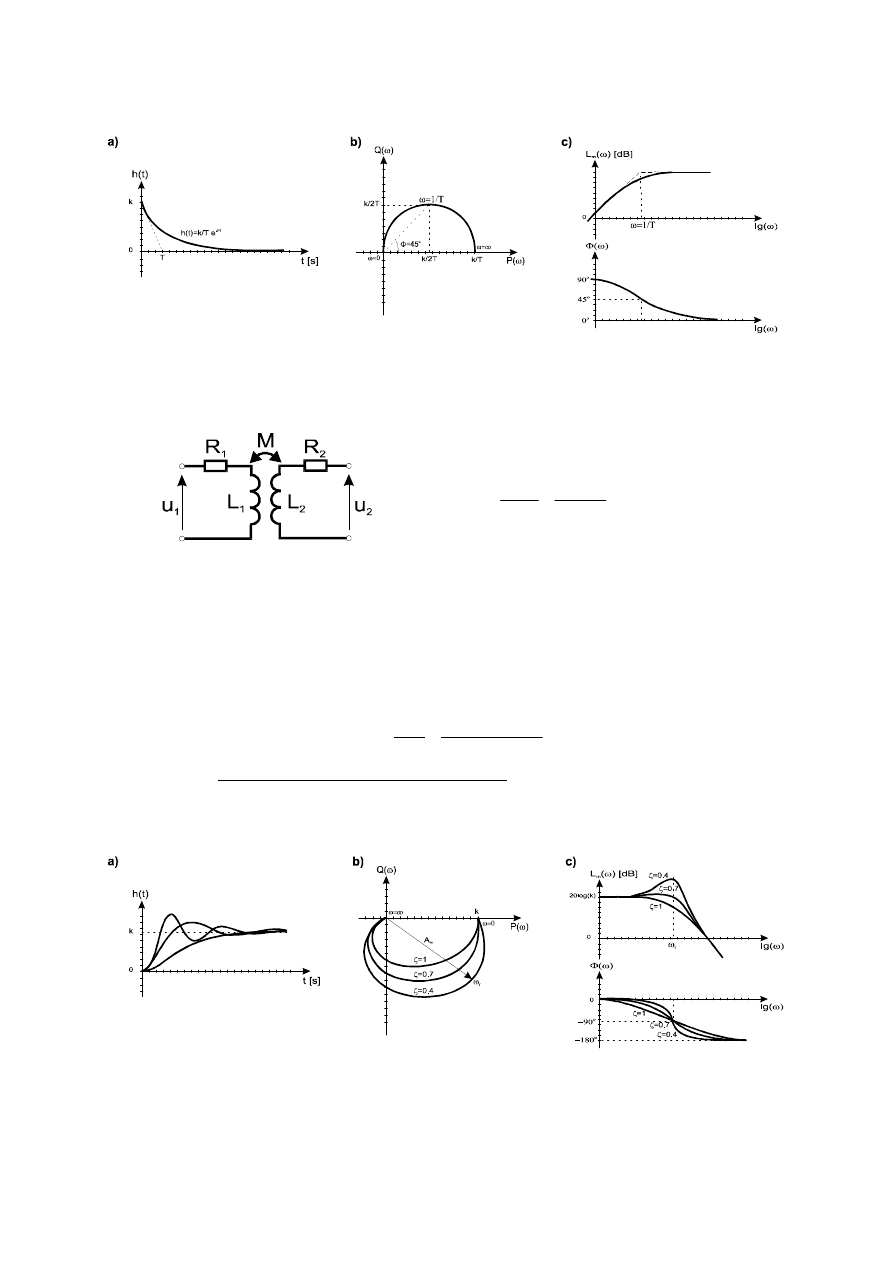
Rys. 1.12. Charakterystyki rzeczywistego członu różniczkującego: a) skokowa; b)amplitudowo-fazowa, c)
Bodego
Przykładem członu różniczkującego z inercją jest transformator powietrzny (patrz rys. 1.13):
Rys. 1.13. Transformator powietrzny
d) Człon oscylacyjny II-go rzędu
Człon opisany równaniem różniczkowym postaci:
u
k
y
y
T
y
T
n
n
⋅
=
+
⋅
+
⋅
&
&
&
ζ
2
2
(1.30)
o transmitancji operatorowej:
1
2
)
(
)
(
)
(
2
2
+
+
=
=
s
T
s
T
k
s
U
s
Y
s
G
n
n
ζ
(1.31)
nazywany jest rzeczywistym członem różniczkującym (z inercją). Parametrami tego członu są
stałe współczynniki transmitancji: k-współczynnik wzmocnienia oraz T
n
-okres drgań własnych
nietłumionych,
ζ
-wzglądny współczynnik tłumienia (0<
ζ
<1).
Rys. 1.14. Charakterystyki członu oscylacyjnego: a) skokowa; b)amplitudowo-fazowa, c) Bodego
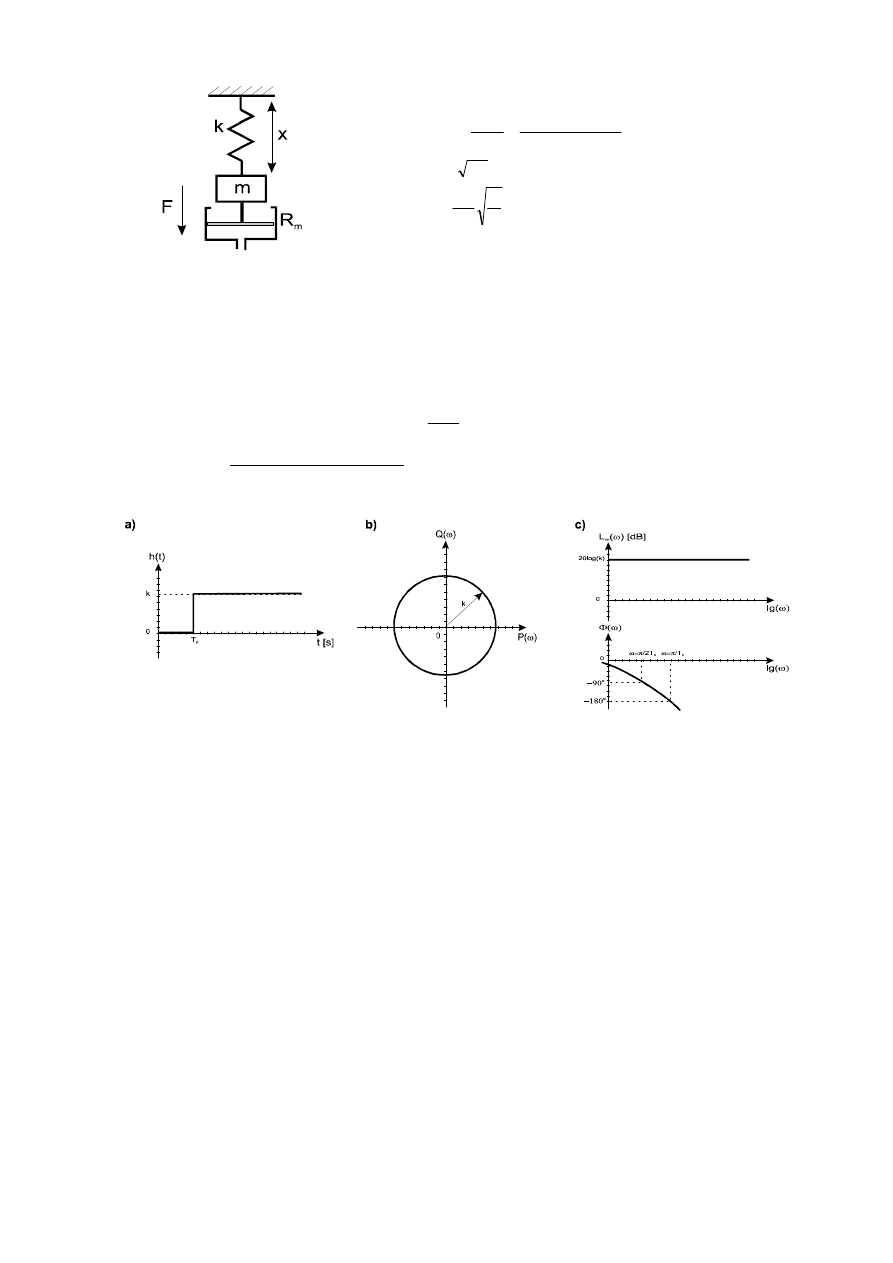
Przykładem członu oscylacyjnego jest zawór membranowy (patrz rys. 1.15):
1
1
1
2
)
(
)
(
)
(
sL
R
sM
s
U
s
U
s
G
+
=
=
10
Rys. 1.15. Zawór membranowy
e) Człon opóźniający
Człon opisany równaniem postaci:
)
(
)
(
o
T
t
u
k
t
y
−
⋅
=
(1.32)
o transmitancji operatorowej:
o
sT
ke
s
U
s
Y
s
G
−
=
=
)
(
)
(
)
(
(1.33)
nazywany jest członem opóźniającym. Parametrami tego członu są stałe współczynniki
transmitancji: k-współczynnik wzmocnienia oraz T
o
-czas opóźnienia.
Rys. 1.16. Charakterystyki członu opóźniającego: a) skokowa; b)amplitudowo-fazowa, c) Bodego
Przykładem członu opóźniającego jest taśma transportowa (montażowa) w zakładzie
produkcyjnym.
1.4.
Klasyfikacja metod identyfikacji
Ogólnie metody identyfikacji można podzielić na metody analityczne i eksperymentalne.
Metody analityczne polegają na badaniu procesów fizycznych, chemicznych i konstruowaniu
opisu matematycznego bez dokonywania doświadczeń na obiekcie.
Metody eksperymentalne mogą dotyczyć wyznaczania charakterystyk dynamicznych albo
charakterystyk statycznych i mogą być aktywne albo pasywne. Metody aktywne wymagają
wprowadzania w czasie eksperymentu celowych standardowych zakłóceń co, może spowodować
pewne komplikacje otrzymane z obiektu w czasie jego normalnej pracy.
Do aktywnych metod identyfikacji charakterystyk dynamicznych należy metoda
charakterystyk czasowych i metoda charakterystyk częstotliwościowych. Metody te umożliwiają
identyfikację prostych (jednowymiarowych) obiektów liniowych, bądź złożonych ale przy
założeniu prowadzenia eksperymentu w obszarze małych odchyleń wokół punktu pracy obiektu
co zapewni warunek liniowości.
Do identyfikacji wielowymiarowych złożonych obiektów sterowania są stosowane metody
statystyczne. Należą do nich:
-
metoda korelacji,
m
k
R
mk
T
s
T
s
T
k
s
F
s
X
s
G
m
n
n
n
2
1
2
)
(
)
(
)
(
2
2
=
=
+
+
=
=
ζ
ζ
11
-
metoda analizy regresyjnej,
-
metoda analizy czynnikowej,
-
metoda aproksymacji stochastycznej.
Istnieje również metoda identyfikacji polegająca na porównywaniu działania modelu
symulacyjnego /metoda symulacyjna/ obiektu o nastawialnych parametrach i strukturze z
działaniem obiektu rzeczywistego.
1.5.
Identyfikacja własności dynamicznych obiektu metodą charakterystyk
czasowych
Metoda ta polega na pomiarze (zarejestrowaniu) przebiegu przejściowego na wyjściu
badanego obiektu po podaniu na jego wejście wymuszenia standardowego, najczęściej sygnału
skokowego postaci:
u(t)=A
⋅
1(T)+u
0
(1.34)
Wówczas odpowiedź skokowa obiektu będzie następująca:
x(t)=A
•
h(t)+x
0
(1.35)
gdzie: A-amplituda wymuszenia, której wybór zależy od zakłóceń istniejących w czasie pomiaru
i stopnia nieliniowości obiektu,
1(t)-skok jednostkowy,
h(t)-odpowiedź obiektu na skok jednostkowy,
u
0
, x
0
–wartości początkowe (współrzędne punktu pracy obiektu).
Bezpośrednie wyznaczenie charakterystyk skokowych napotyka na pewne trudności którymi
są:
-
trudność uzyskania idealnego skoku jednostkowego na wejściu,
-
w przypadku istnienia zamkniętej pętli oddziaływania lub efektu różniczkowania w obiekcie
podanie sygnału skokowego na jego wejście może powodować wchodzenie obiektu w zakres
nieliniowości.
Z tych przyczyn często stosuje się pośrednie wyznaczenie charakterystyki skokowej.
1.5.1
Pośrednie wyznaczenie charakterystyki skokowej.
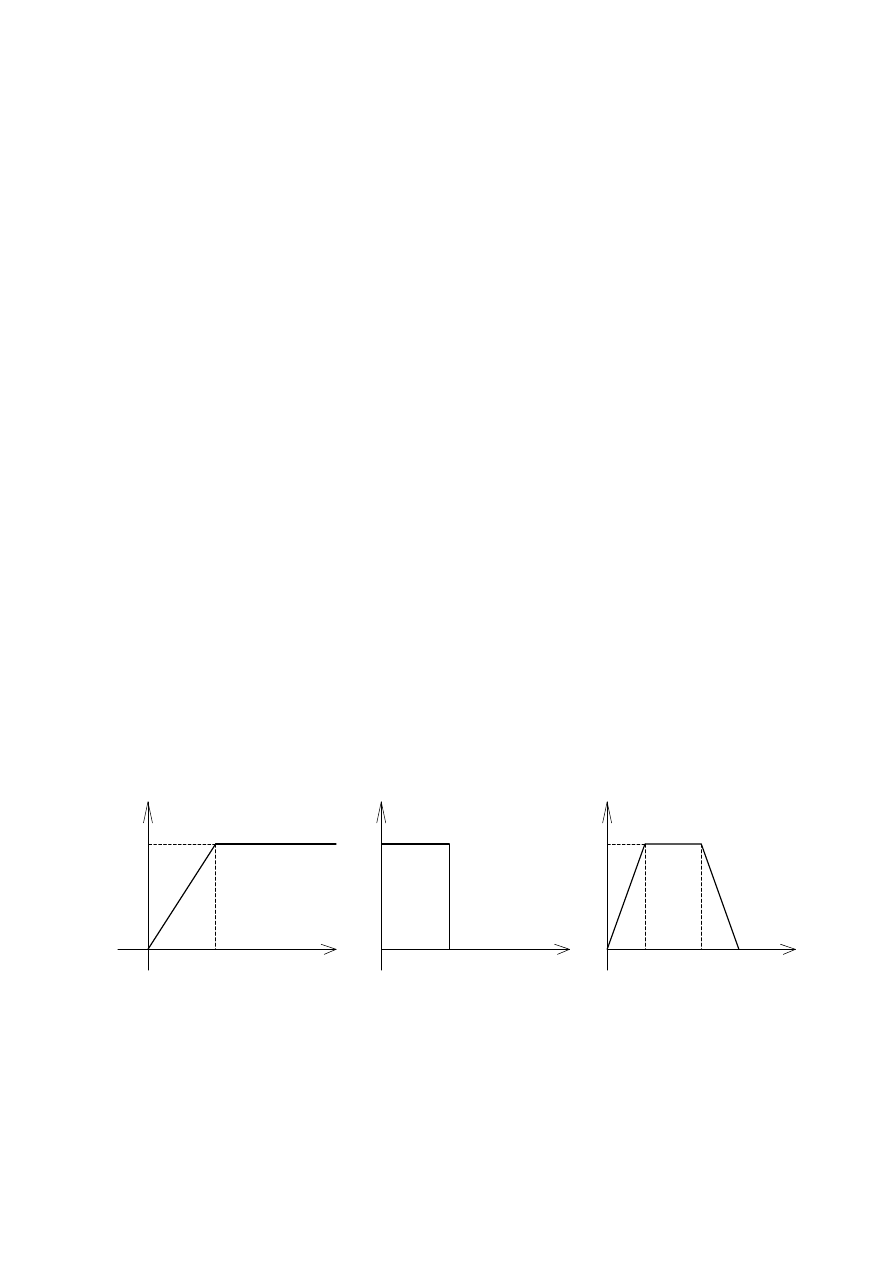
Rzeczywiste przebiegi sygnałów wymuszających są przedstawione na rys. 1.17.
a)
U1(t)
U10+A
U10
t1
U2(t)
b)
A
A
t
t
t1
0
0
0
A
t1
t2+t1
t2+2t1
t
c)
U3(t)
Rys.1.17. Rzeczywiste sygnały wymuszające: a) sygnał trapezoidalny skokowy, b) sygnał w postaci
impulsu prostokątnego, c) impuls trapezowy
Sygnał trapezoidalny skokowy powstaje w wyniku ograniczonej prędkości przedstawiania
elementu wykonawczego na obiekcie np. zaworu, przepustnicy oraz niedysponowanie źródłem o
nieskończenie dużej mocy. Często czas t
1
jest pomijalnie mały w stosunku do stałych czasowych
obiektu. W przypadku, gdy tego czasu nie można pominąć wymuszenie będzie opisane
zależnością 1.36.
12
h
1
(t)=
∫
−
−
t
dt
t
t
t
t
A
0
1
1
)]
(
1
)
(
1
[
(1.36)
Odpowiedź obiektu na wymuszenie (1.36) będzie następująca:
x
2
(t)=
∫
−
−
t
dt
t
t
h
t
h
t
A
0
1
1
)]
(
)
(
[
(1.37)
Z zależności (1.37) można wyznaczyć odpowiedź obiektu na wymuszenie w postaci skoku
jednostkowego:
)
(
)
(
)
(
1
2
1
t
t
h
t
X
dt
d
A
t
t
h
−
+
⋅
=
(1.38)
Konieczność stosowania sygnałów wymuszających w postaci impulsów wynika ze
względów technologicznych (w przypadku astatyzmu obiektu). Analityczny opis takiego sygnału
rys.1.17b jest następujący:
U
2
(t)=A[1(t)-1(t-t
1
)]
(1.39)
Odpowiedź obiektu będzie miała postać:
)]
(
)
(
[
)
(
1
2
t
t
h
t
h
A
t
x
−
−
=
(1.40)
Z równania (1.40) można wyznaczyć charakterystykę skokową h(t):
)
(
1
)
(
)
(
1
1
t
t
h
A
t
x
t
h
−
+
⋅
=
(1.41)
Mając więc zarejestrowaną odpowiedź obiektu na impuls prostokątny, można wyznaczyć
odpowiedź h(t) dodając w kolejnych chwilach t>t
1
do przebiegu x
1
(t) wartości h(t) z chwil
poprzedzających.
1.5.2.
Określenie transmitancji obiektu i jej parametrów na podstawie charakterystyki
skokowej
Mając charakterystykę skokową obiektu a nawet ogólniej – odpowiedź obiektu na dowolne
wymuszenie , można wyznaczyć wartości współczynników równania różniczkowego
opisującego własności dynamiczne tego obiektu. Warunkiem jest tutaj znajomość postaci
równania różniczkowego, a co za tym idzie postaci transmitancji.
Pierwszą czynnością jaką należy wykonać jest stwierdzenie czy dany obiekt jest: statyczny
(np. inercyjny, oscylacyjny, różniczkujący) czy astatyczny (zawierający człony całkujące).
a) obiekty statyczne
Najprostszym obiektem astatycznym jest człon inercyjny pierwszego rzędu. Parametrami
jednoznacznie charakteryzującymi go jest stała czasowa T oraz współczynnik wzmocnienia
obiektu k. Stała czasowa charakteryzuje szybkość zmian sygnału wyjściowego, natomiast k jest
stosunkiem wartości ustalonej sygnału wyjściowego do wartości sygnału na wejściu.
Współczynnik wzmocnienia k można wyznaczyć z charakterystyki statycznej obiektu.
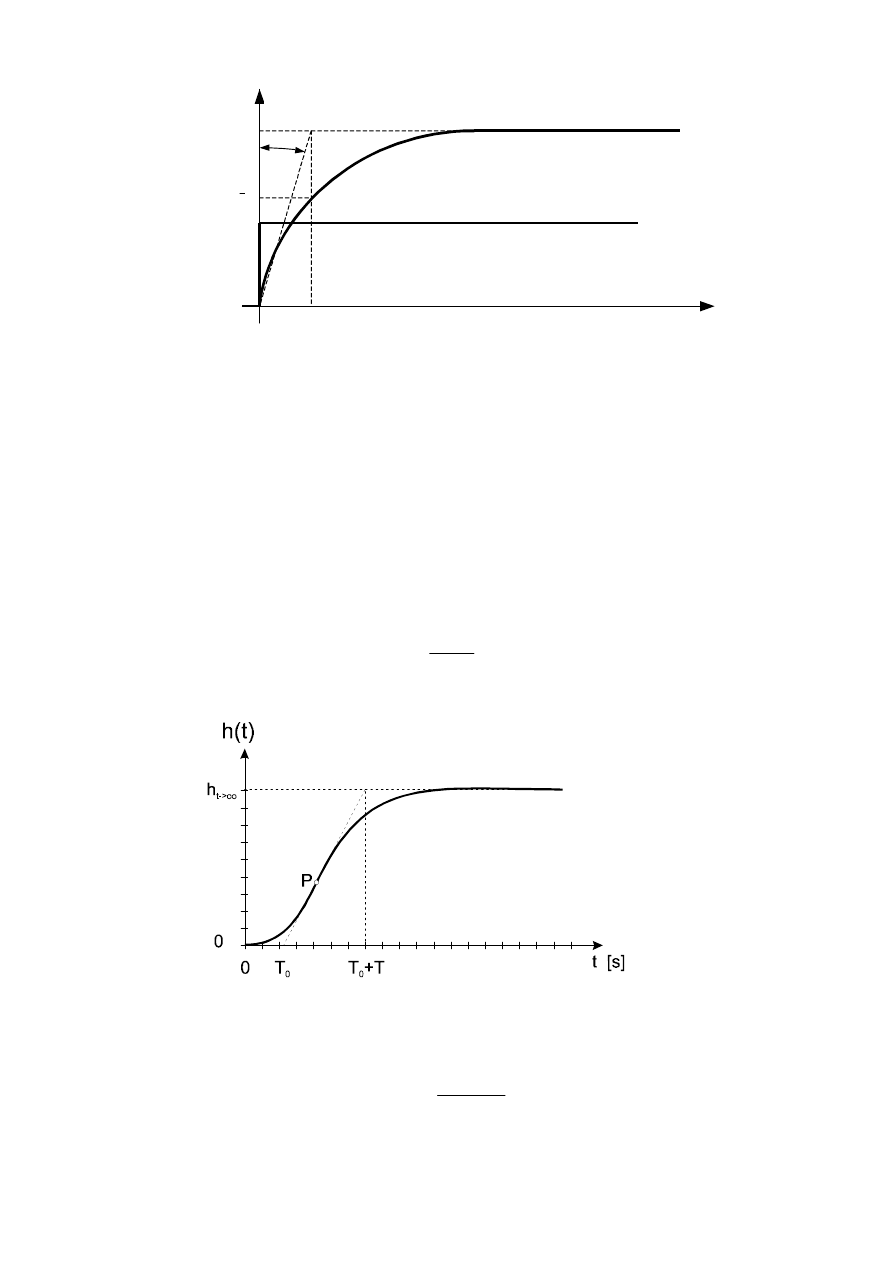
Graficznie stałą czasową wyznacza się jak na rys. 1.18. dwoma sposobami:
1.
jako czas po upływie którego odpowiedź obiektu na skok jednostkowy osiągnie wartość
.
)
1
1
(
637
,
0
ust
e
y
k
A
≈
⋅
−
2.
przy założeniu, że u(t) = A
⋅
1(t) ; A = 1, k = 1, stała czasowa T określona jest przez
tangens kąta
α
zawartego pomiędzy styczną do krzywej przebiegu h(t) przechodząca przez
początek układu współrzędnych, a osią rzędnych.
13
h(t)
A
⋅
k
α
)
1
1
(
e
k
A
−
⋅
y
ust.
A
⋅
1(t)
t
T
0
Rys. 1.18. Wyznaczanie stałej czasowej obiektu inercyjnego I-go rzędu
Nie zawsze własności dynamiczne rzeczywistych obiektów przemysłowych można opisać
transmitancjami o prostej postaci np. pierwszego rzędu. Bardzo często w tych obiektach
występuje znaczne opóźnienie i adekwatny model w postaci transmitancji powinien być
wyższego rzędu. Dla prostoty przyjmuje się czyste opóźnienie i opisuje je wyrażeniem e
-sTo
–
gdzie T
O
jest czasem opóźnienia. Czas opóźnienia jest to czas, po jakim uzyskuje się zmiany
wartości wyjściowej identyczne ze zmianami wielkości wejściowej np. w praktyce opóźnienie
tzw. transportowe wynika ze skończonego czasu przepływu medium w rurociągach,
transporterach, instalacjach itp. Przyjmuje się, że obiekt składający się z szeregowo połączenych
wielu członów pierwszego rzędu o małych stałych czasowych można aproksymować modelem
zawierającym opóźnienie gdy n
≥
8
÷
10, gdzie n jest ilością członów. W takim przypadku błąd
aproksymacji nie jest istotny. Najprostszym przybliżeniem obiektu wysokiego rzędu jest
aproksymacją za pomocą obiektu pierwszego rzędu z opóźnieniem:
)
(
0
1
)
(
sT
e
sT
k
s
G
−
+
=
(1.42)
Parametry transmitancji zastępczej takiego modelu wyznacza się jak na rys.1.19.
Rys. 1.19. Wyznaczenie parametrów transmitancji zastępczej obiektu statycznego
Innym przybliżeniem obiektu statycznego wysokiego rzędu może być aproksymacja za
pomocą transmitancji:
G(s) =
n
sT
sT
e
k
O
)
1
(
+
⋅
(1.43)
Parametry T
0
, T i n wyznacza się w sposób następujący:
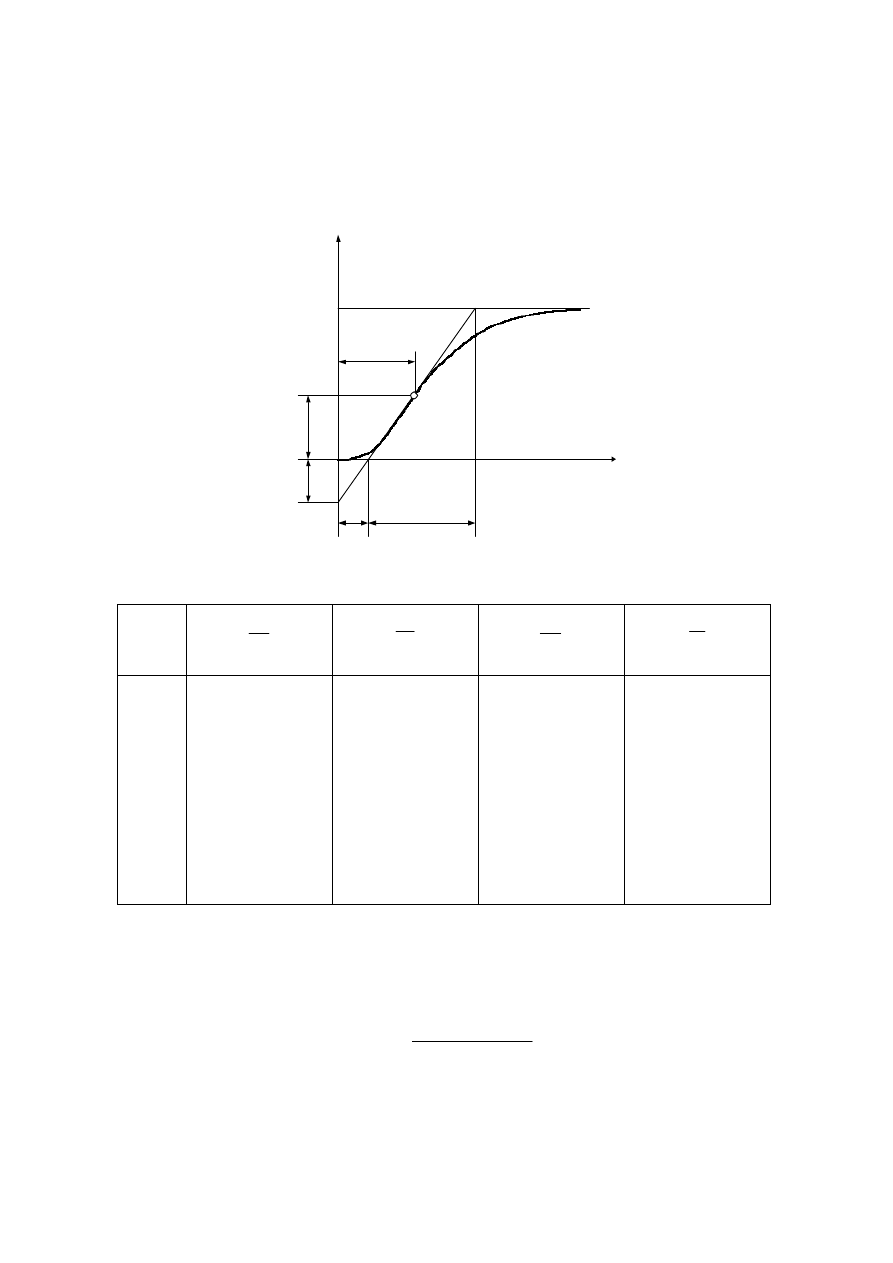
14
1.
Na zdjętej doświadczalnie odpowiedzi obiektu na skok jednostkowy określa się punkt
przegięcia P (rys.1.20) o współrzędnych t
1
i
φ
1
i rysuje się styczną do charakterystyki w tym
punkcie.
2.
Na podstawie rys.1.20. oraz tablicy 1.1 wyznacza się wartości parametrów n, T. Jeżeli T
1
/T
2
znajduje się między dwiema wartościami ‘’n’’ podanymi w tablicy, należy zmniejszyć T
1
o
taką wartość, aby uzyskać wartość podaną w tablicy. Wtedy T
1
’
= T
1
– T
0
.
t
h(t)
P
T
i
T
1
T
2
φ
i
τ
Rys.1.20. Rysunek pomocniczy do wyznaczania parametrów transmitancji (1.43)
Tablica 1.1
n
T
T
2
T
T
1
2
1
T
T
T
t
i
1
2
3
4
5
6
7
8
9
10
1
2,718
3,695
4,463
5,119
5,689
6,226
6,711
7,164
7,590
0
0,282
0,805
1,425
2,100
2,811
3,549
4,307
5,081
5,869
0
0,104
0,218
0,319
0,410
0,493
0,570
0,642
0,709
0,773
0
1
2
3
4
5
6
7
8
9
Metoda powyższa nie jest słuszna dla obiektów oscylacyjnych oraz obiektów zawierających
człony różniczkujące, które to obiekty są również statyczne (obiekt oscylacyjny jest statyczny
jeżeli występuje tłumienie co w praktyce jest zawsze spełnione).
W przypadku obiektu oscylacyjnego:
1
2
)
(
2
2
+
+
=
s
T
s
T
k
s
G
n
n
ζ
(1.44)
na podstawie zarejestrowanego przebiegu jego odpowiedzi na skok jednostkowy wyznacza się
parametry tzn. współczynnik wzmocnienia k (stosunek wartości ustalonej odpowiedzi do
wartości sygnału wymuszającego),współczynnik tłumienia
ξ
i stałą czasową T (patrz rys.1.21
oraz zależności (1.45) i (1.46)).
15
3
1
2
3
1
ln
4
ln
A
A
A
A
+
Π
=
ξ
(1.45)
Π
−
−
=
)
(
1
2
3
2
t
t
T
ξ
(1.46)
A
1
t
3
-t
1
A
3
0,02 h
h(t)
t
n
t
1max
t
u
h
∞
∞
t
k
0
0.1k
0.9k
Rys.1.21. Odpowiedź na skok jednostkowy obiektu oscylacyjnego II rzędu.
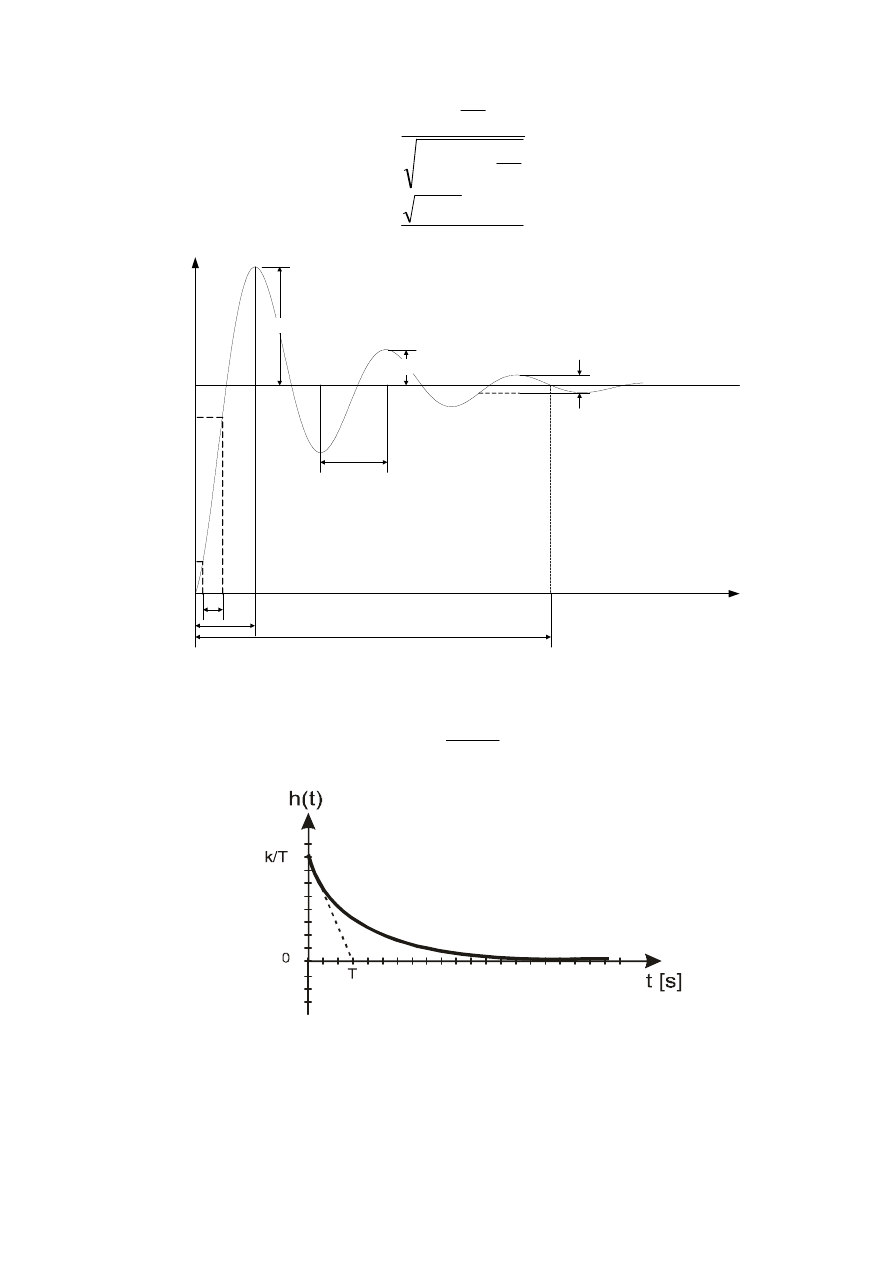
Natomiast w przypadku obiektu różniczkującego:
)
1
(
)
(
+
=
Ts
ks
s
G
(1.47)
należy wyznaczyć współczynnik wzmocnienia k oraz stałą czasową T kierując się rys. 1.22.
Rys.1.22. Odpowiedź na skok jednostkowy obiektu różniczkującego.
b) obiekty astatyczne
Dla obiektów astatycznych (zawierających człony całkujące) wyższych rzędów transmitancję
rzeczywistą aproksymuje się transmitancją o postaci:
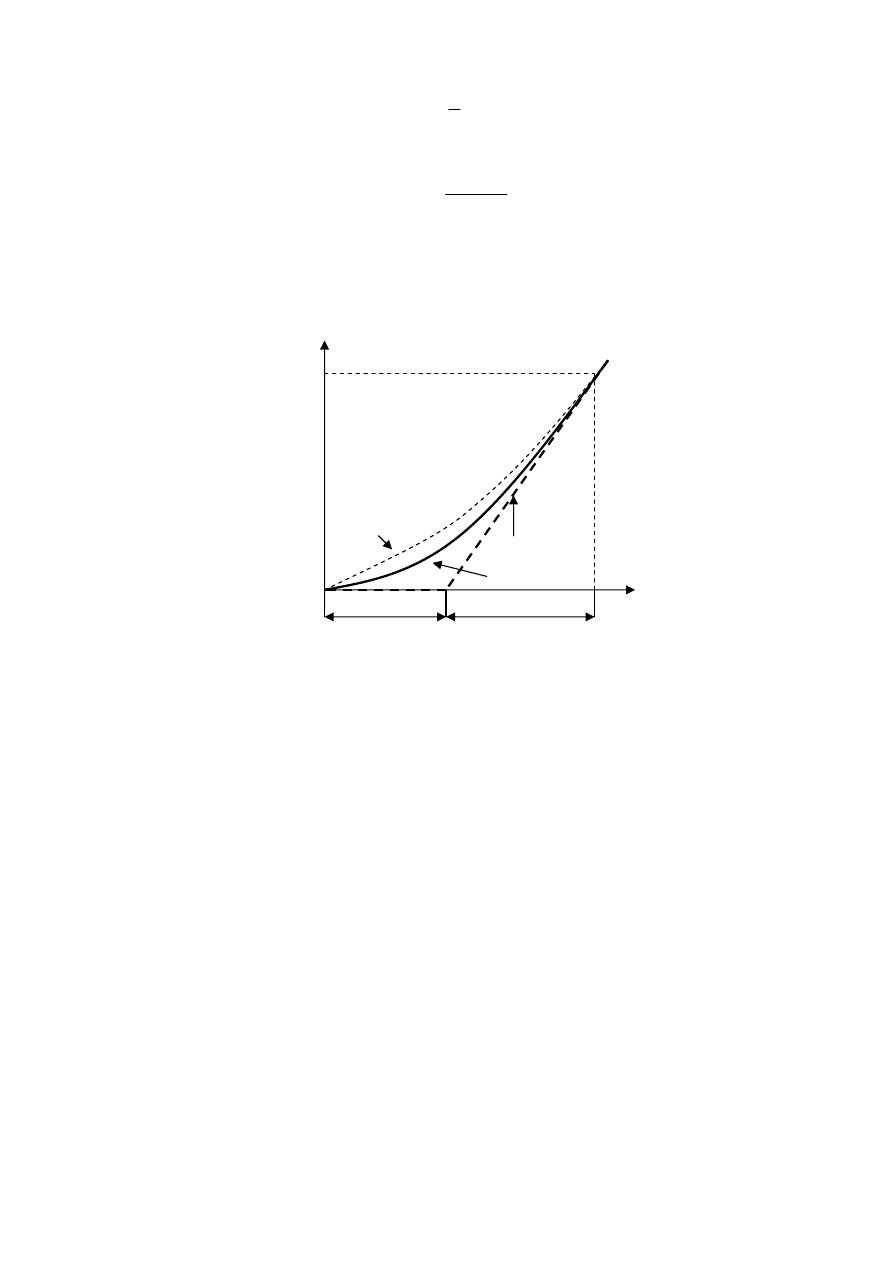
16
)
(
1
0
)
(
sT
e
s
k
s
G
−
=
(1.48)
lub:
)
1
(
)
(
2
Ts
s
k
s
G
+
=
(1.49)
gdzie: k - współczynnik wzmocnienia prędkościowego,
T
0
- opóźnienie,
T - stała czasowa.
Sposób wyznaczania parametrów transmitancji pokazuje rys.1.23.
h(t)
1
Charakterystyka
zastępcza Charkterystyka
G
2
(s) zastępcza G
1
(s)
Charakterystyka rzeczywista
0 t
T
0
k
-1
Rys.1.23. Wyznaczanie parametrów transmitancji zastępczych obiektu astatycznego.
1.6.
Identyfikacja własności dynamicznych obiektu metodą charakterystyk
częstotliwościowych
Metody charakterystyk częstotliwościowych należą obok metody charakterystyk czasowych
do podstawowych metod identyfikacji obiektów dynamicznych. Metody te są znacznie
dokładniejsze i pewniejsze niż metoda charakterystyk czasowych, lecz niejednokrotnie są
znacznie bardziej pracochłonne.
Wyznaczanie charakterystyk częstotliwościowych polega na pomiarze (zarejestrowaniu) w
stanie ustalonym odpowiedzi obiektu na wymuszenie sinusoidalne o stałej amplitudzie i
częstotliwości. Pomiarów takich dokonuje się przy różnych częstotliwościach kątowych
(pulsacjach) teoretycznie dla pasma od
ω
=0 do
ω
=
∞
.
Dla obiektów liniowych odpowiedź na wymuszenie sinusoidalne ma również kształt
sinusoidalny, lecz dla różnych pulsacji inną amplitudę i inną fazę w zależności od właściwości
obiektu.
Na
podstawie
przeprowadzonych
pomiarów
można
wykreślić
charakterystyki
częstotliwościowe obiektu takie jak: charakterystyka amplitudowo-fazowa, charakterystyki
logarytmiczne amplitudowa i fazowa. Charakterystyki te opisują własności dynamiczne obiektu
jak również są wykorzystywane do projektowania układów regulacji automatycznej (dobór
korektorów, regulatorów i ich nastaw, analiza stabilności, itp.).
Znając przebieg charakterystyk częstotliwościowych należy określić typ transmitancji
widmowej obiektu a następnie wyznaczyć punkty charakterystyczne, z których można byłoby
określić parametry tej transmitancji.
17
Ogólnie można powiedzieć, że identyfikacja obiektu regulacji będzie polegała na
wykreśleniu doświadczalnie uzyskanej charakterystyki amplitudowo-fazowej obiektu i
porównaniu jej z charakterystykami podstawowych członów dynamicznych wykreślonymi w tej
samej skali. W pewnych przypadkach lepsze efekty daje porównanie charakterystyk
logarytmicznych amplitudowej i fazowej obiektu z tymi samymi charakterystykami
podstawowych członów dynamicznych. Wadą tej metody jest jednak konieczność uzgodnienia
skali częstotliwości. Wartości parametrów transmitancji widmowej wyznacza się z
asymptotycznej charakterystyki logarytmicznej amplitudowej i fazowej.
1.6.1.
Identyfikacja na podstawie logarytmicznych charakterystyk amplitudowych i
fazowych
Zasadniczym powodem stosowania charakterystyk logarytmicznych jest łatwość określania
charakterystyki wypadkowej dowolnie złożonego układu jako złożenia charakterystyk
logarytmicznych prostych członów połączonych kaskadowo. Wynika to z następującego
rozumowania: każdą transmitancję widmową układu realizowanego fizycznie można
przedstawić w postaci ilorazu dwóch funkcji algebraicznych.
W transmitancji widmowej postaci:
)
(
)
(
)
(
ω
ω
ω
j
M
j
L
k
j
G
=
(1.50)
gdzie: k – stała , równa współczynnikowi wzmocnienia,
L(j
ω
) , M.(j
ω
) – wielomiany licznika i mianownika, przy czym stopień L(j
ω
) jest
mniejszy od stopnia wielomianu M.(j
ω
),
mogą wystąpić trzy rodzaje czynników:
m
j )
(
ω
;
n
T
j
)
1
(
+
ω
; oraz
[
]
P
T
j
T
j
1
2
)
(
2
+
+
ξω
ω
(1.51)
Transmitancję G(j
ω
) można zapisać jako iloczyn transmitancji elementarnych (1.51) i wtedy:
/
/
/
/
/
2
1
/
/
/
/
2
/
/
1
/
/
1
2
1
)
(
....
)
(
)
(
)
(
....
)
(
)
(
)
(
ω
ω
ω
ϕ
ω
ϕ
ω
ϕ
ω
ϕ
ω
φ
ω
ω
ω
ω
ω
ω
ω
r
n
j
r
j
n
j
j
j
e
j
G
j
G
j
G
e
j
G
e
j
G
e
j
G
e
j
G
ϕ
+
...
+
/
ϕ
+
2
⋅
=
=
⋅
=
(1.52)
Przechodząc do charakterystyk logarytmicznych otrzymujemy:
[
]
[
]
[
]
)
(
...
)
(
)
(
)
(
log
20
...
)
(
log
20
)
(
log
20
)
(
log
20
2
1
2
1
+
+
+
=
=
+
+
+
=
ω
ω
ω
ω
ω
ω
ω
j
G
L
j
G
L
j
G
L
j
G
j
G
j
G
j
G
r
m
m
m
r
(1.53)
oraz
)
(
)
(
)
(
)
(
ϕ
+
...
+
ϕ
+
ϕ
=
ϕ
2
1
ω
ω
ω
ω
r
(1.54)
Stąd widać, że wykresy charakterystyk logarytmicznych tworzy się przez geometryczne
sumowanie charakterystyk wykreślonych dla poszczególnych czynników (transmitancji
elementarnych) transmitancji widmowej.
Drugą zaletą stosowania charakterystyk logarytmicznych jest łatwość ich przybliżonego
uproszczenia, czyli przedstawiania w tzw. postaci asymptotycznej. Polega to na tym, że dla
czynników o postaci (j
ω
T+1) rysujemy asymptoty charakterystyki logarytmicznej amplitudowej
korzystając z zależności:
>>
Τ
∞
→
0
→
=
+
)
1
(
20log(
0
1
log
20
2
2
ω
ω
ω
ω
ω
wtedy
dla
dla
T)
T
(1.55)
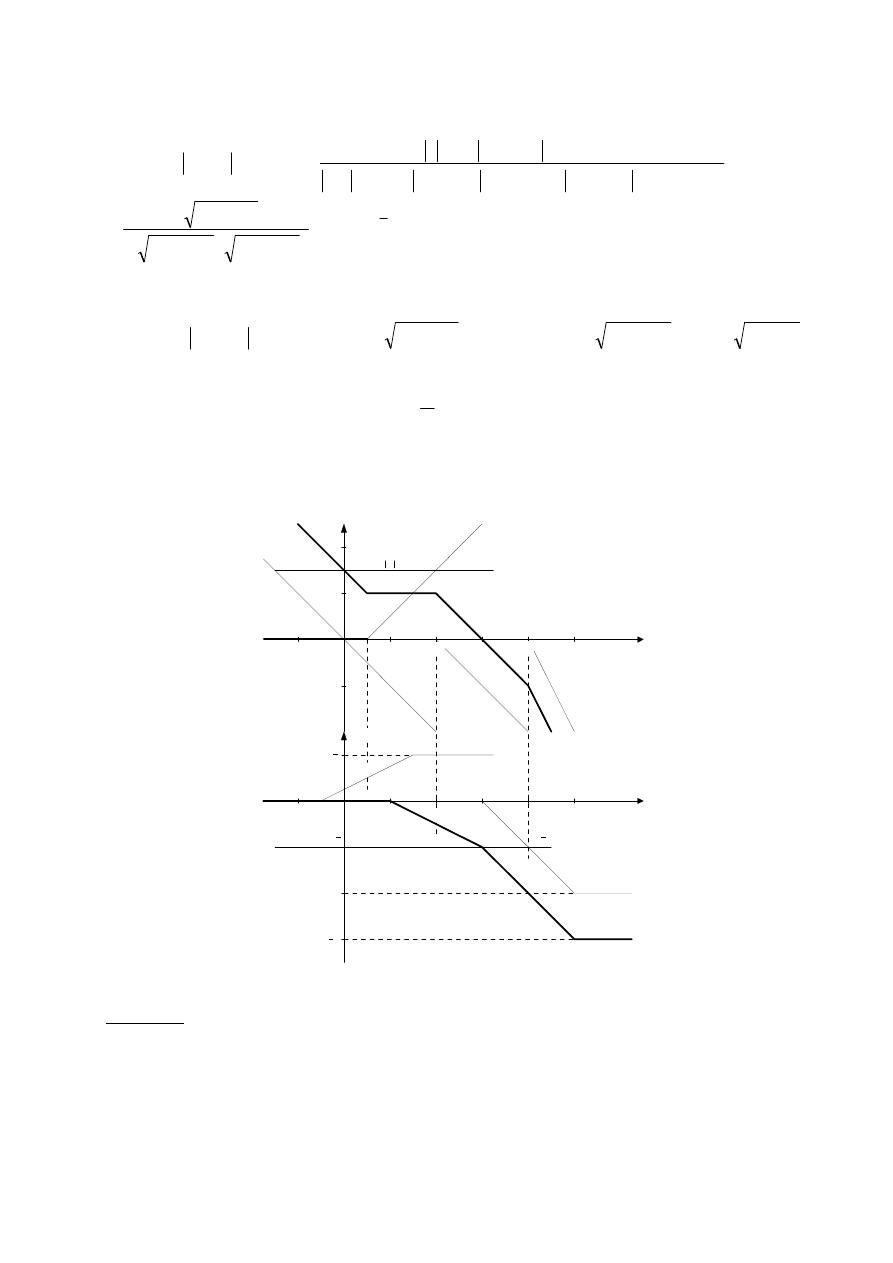
Przykład 1: Dana jest transmitancja widmowa pewnego obiektu dynamicznego:
2
2
1
/
1
/
/
1
/
1
/
/
+
Τ
⋅
+
/
+
=
/
3
ω
ω
ω
ω
ω
j
T
j
j
T
j
k
j
G
(1.56)
18
przy czym: 1>T
1
>T
2
>T
3
; k>1
Transmitancja (1.56) może zostać przekształcona w następujący sposób:
{
}
/
arctg
2
arctg
2
arctg
/
2
2
3
2
2
2
1
2
/
1
arg/
/
1
arg/
/
arg/
/
1
arg/
1
arg
/
arg
3
3
2
1
1
1
1
1
1
/
Τ
−
Τ
−
−
Τ
2
2
2
+
Τ
3
+
Τ
2
+
Τ
/
2
1
1
+
⋅
+
+
=
=
+
Τ
+
Τ
+
=
/
/
=
/
ω
ω
π
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
j
j
j
j
j
j
j
j
j
k
j
j
G
j
e
T
T
T
k
e
j
e
j
e
j
e
T
j
e
k
e
j
G
j
G
(1.57)
Wówczas otrzymujemy logarytmiczne charakterystyki:
amplitudową:
(1.58)
1
log
40
1
log
20
log
20
1
log
20
log
20
/
/
log
20
2
3
2
2
2
1
+
−
+
−
−
+
+
=
=
2
2
2
T
T
T
k
j
G
L
m
ω
ω
ω
ω
ω
i fazową:
(1.59)
Na rysunku 1.24 przedstawiono charakterystykę asymptotyczną amplitudy i fazy dla
powyższego przykładu. Rzeczywista logarytmiczna charakterystyka amplitudowa ma nieco inny
przebieg. Największe różnice występują dla punktów załamania.
-1
0
1
2
3
4
5
0,1
0
10
10
10
10
10
1
2
3
4
5
20
40
-20
Lm [dB]
ω
log
ω
ω
log
ω
-1
0
1
2
3
4
5
π
2
π
2
-
π
-
π
3
2
-
-2
0 d
B/d
ek
+2
0
dB
/d
ek
-2
0 d
B/d
ek
-1
-1
-3
-2
0
d
B
/d
e
k
k
π
2
-
ϕ(ω)
[rad]
arc
tg
T
ω
1
-arc
tg T
ω
2
-2
arc
tg
T
ω
3
ϕ(ω)
Rys. 1.24. Charakterystyki logarytmiczne asymptotyczne dla przykładu 1.
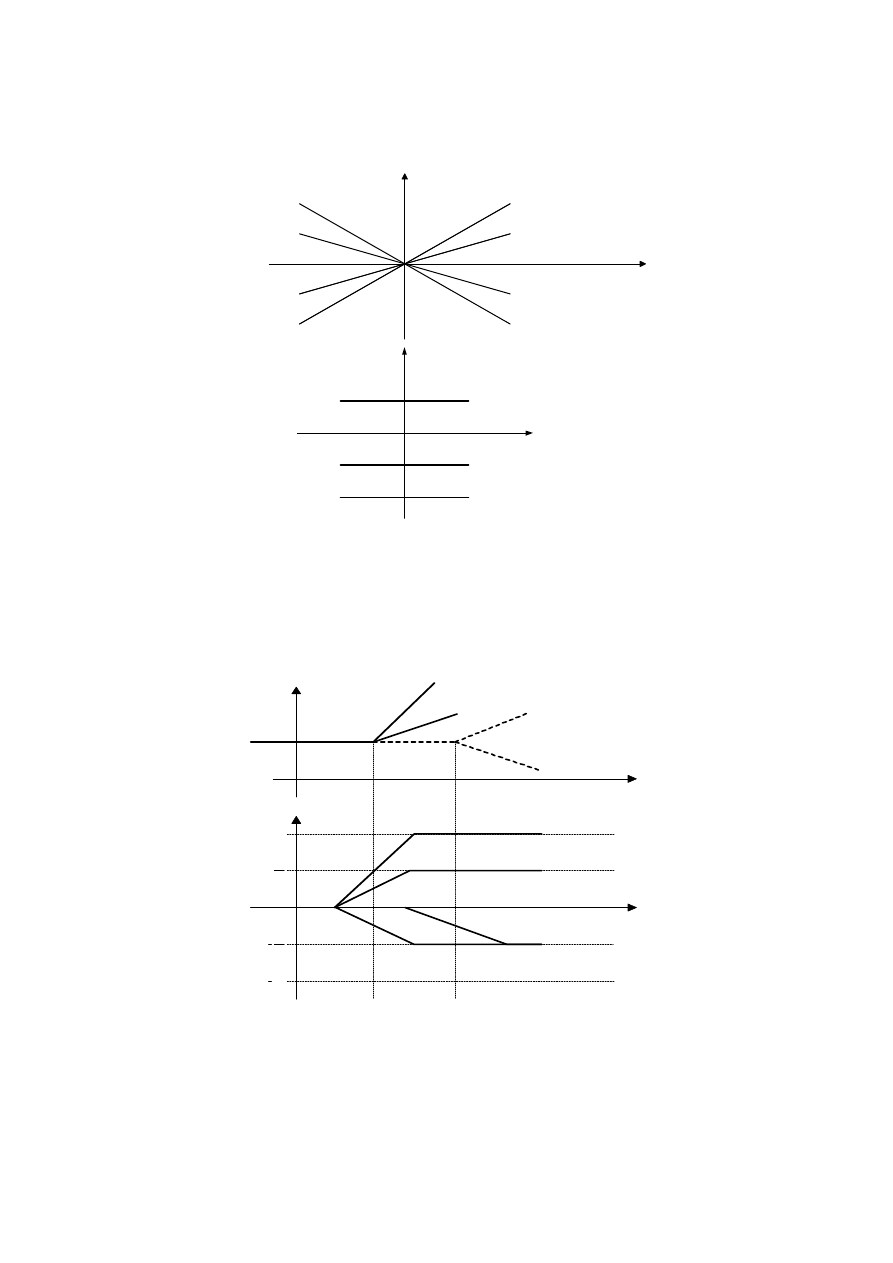
Przykład 2: Dla prostych członów o transmitancji postaci:
a)
G(s) = s
k
; k=
±
1,
±
2, .....
(1.60)
charakterystyka amplitudowa:
20log
G(j
ω
)
= k
⋅
20log(
ω
)
(1.61)
T
j
G
ω
ω
π
ω
ω
φ
arctg
2
arctg
2
arctg
/
arg
−
Τ
−
−
Τ
=
/
=
2
1
19
dla dowolnego k przedstawia pęk prostych (o nachyleniu k) przechodzących przez początek
układu współrzędnych. Charakterystyki fazowe natomiast nie zależą od częstotliwości i w całym
zakresie jej zmian są prostymi poziomymi o rzędnych: k
⋅π
/2 (patrz rys. 1.25).
40
dB
/de
k
k=
2
-40
dB
/de
k
k= -
2
-20 dB
/dek
k= -1
20 d
B/de
k
k=1
L
m
k=1
0
k= -1
k=-2
log
Rys. 1.25. Charakterystyki asymptotyczne członu G(s) = S
k
b)
G(s)=K(1+sT
i
)
k
; k=±1, ±2, …..: i=1,2,…..
(1.62)
asymptotyczne charakterystyki przedstawia rys.1.26.
Lm[db]
k
0
k
=
2
k=
1
k=
-1
ω
=1/T
1
i=1
i=2
log
ω
k=
1
0
log
ω
i=
1
k
=
2
i=
1
k=
1
i=2
k=
-1
i=1
k=
-1
ω
ω
ϕ
π
π
π
2
0
π
2
Rys. 1.26. Charakterystyki asymptotyczne członu G(s)=K(1+sT
i
)
k
Dla dowolnego k zmienia się nachylenie charakterystyki amplitudowej oraz graniczna faza
w charakterystyce fazowej.
Tok postępowania przy identyfikacji obiektów na podstawie logarytmicznych
charakterystyk amplitudowych:
20
1.
Po doświadczalnym zdjęciu charakterystyk rysujemy asymptoty charakterystyki
amplitudowej dla małych i dużych częstotliwości.
2.
Na podstawie znaku współczynnika nachylenia asymptoty dla małej częstotliwości i na
podstawie charakterystyki fazowej (sprawdzamy czy dla
ω→
0 faza jest dodatnia czy
ujemna) określamy czy obiekt jest statyczny i czy zawiera elementy różniczkujące. Na
podstawie nachylenia asymptoty dla
ω→
0 określamy rząd całkowania lub różniczkowania.
3.
Znając nachylenie w dB/dek asymptotycznej charakterystyki logarytmicznej dla
ω→
0
określamy rząd inercji występującej w obiekcie.
4.
Piszemy postać transmitancji obiektu (tzn. proponujemy postać równania różniczkowego
opisującego obiekt).
5.
Na podstawie wartości L
m
dla log(
ω
)=1 obliczamy współczynnik wzmocnienia K obiektu.
6.
Z punktów załamania charakterystyki asymptotycznej określamy stałe czasowe inercji i
różniczkowania.
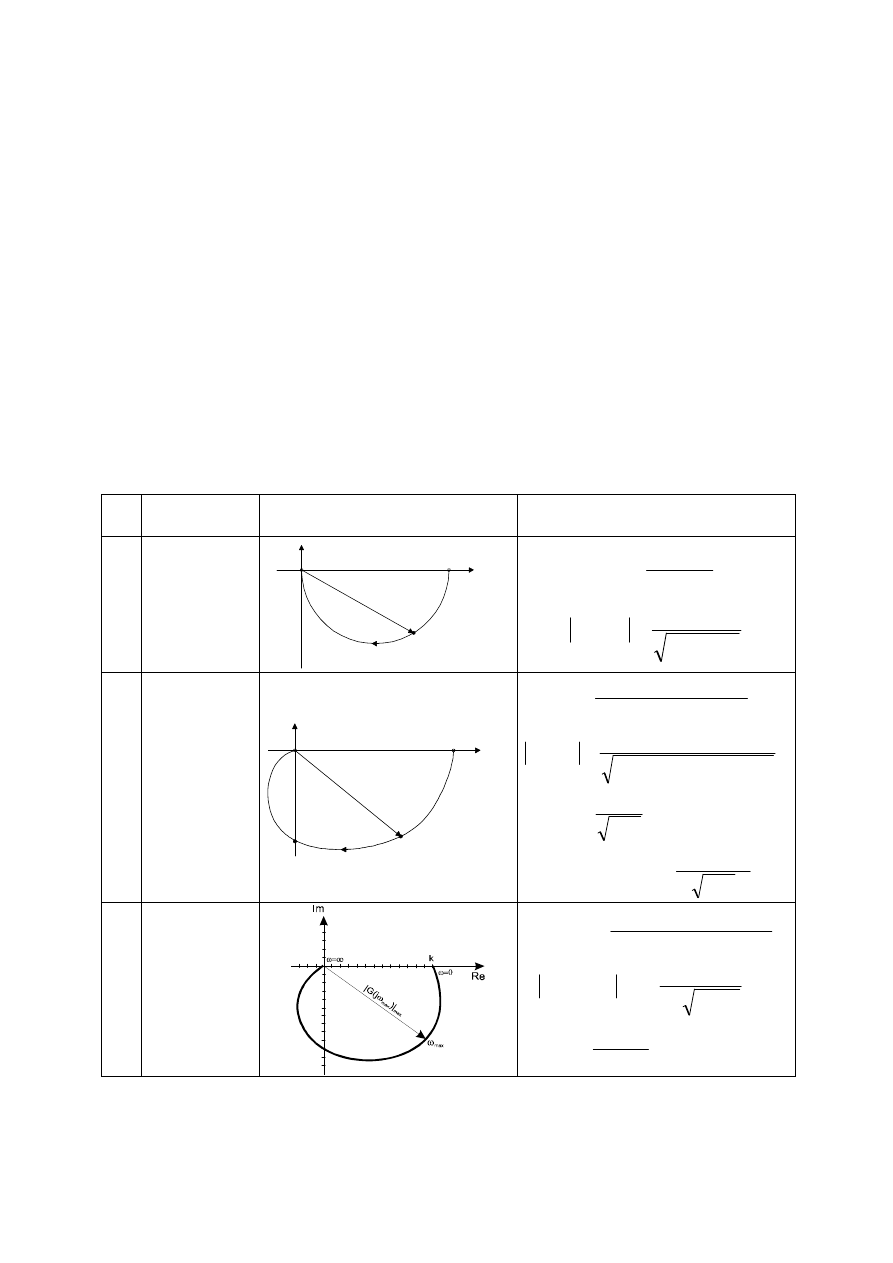
1.6.2.
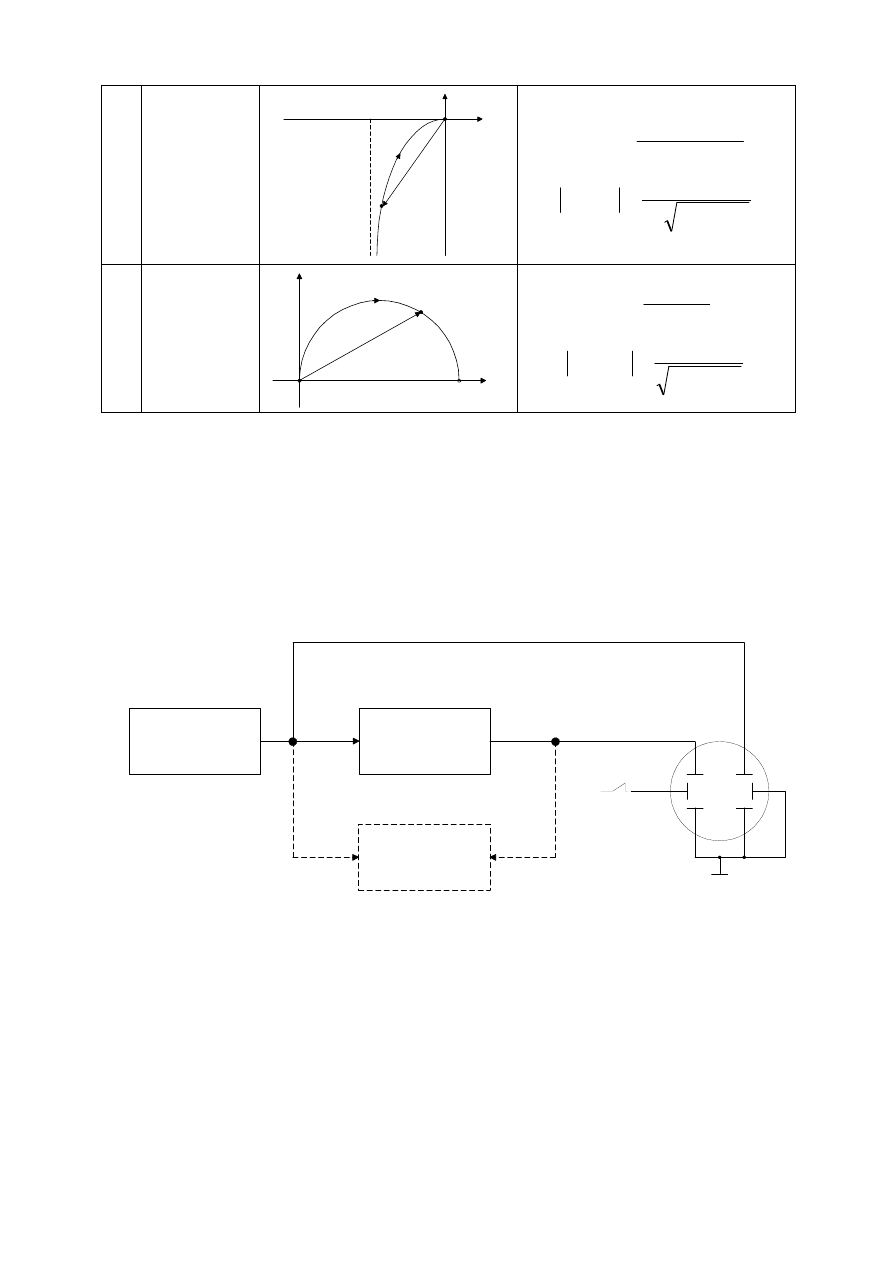
Identyfikacja na podstawie charakterystyk amplitudowo-fazowych
Charakterystyki amplitudowo-fazowe prostych członów dynamicznych oraz wzory
pozwalające na estymację parametrów ich transmitancji zestawione są w tablicy 1.2
Tablica 1.2.
L.p.
ELEMENT
CHARAKTERYSTYKA
AMPLITUDOWO-FAZOWA
WZORY
1.
Inercyjny
I-go
rzędu
Im
Re
ω=∞
ω=0
k
|G(j
ω
1
)|
ω
1
1
)
(
1
)
(
2
2
1
+
=
+
=
T
k
j
G
T
j
k
j
G
ω
ω
ω
ω
2.
Inercyjny
II-go
rzędu
Im
Re
ω=∞
ω=0
k
|G
(j
ω
1
)|
ω
1
ω
2
2
1
2
1
2
2
2
1
2
2
2
2
2
2
1
2
1
2
1
)
(
)]
(
Im[
oraz
0
)]
(
Re[
1
dla
)
1
)(
1
(
)
(
)
1
)(
1
(
)
(
T
T
T
T
k
j
G
j
G
T
T
T
T
k
j
G
T
j
T
j
k
j
G
+
=
=
=
+
+
=
+
+
=
ω
ω
ω
ω
ω
ω
ω
ω
ω
3.
Oscylacyjny
II-go
rzędu
T
k
j
G
Tj
T
j
k
j
G
2
max
2
max
max
2
2
2
1
1
2
)
(
1
2
)
(
)
(
ξ
ω
ξ
ξ
ω
ω
ξ
ω
ω
−
=
−
=
+
+
=
21
4.
Całkujący
rzeczywisty
Im
Re
ω=∞
ω−>0
k·T
|G
(j
ω
1
)|
ω
1
1
)
(
)
1
(
)
(
2
2
1
1
+
=
+
=
T
k
j
G
T
j
j
k
j
G
ω
ω
ω
ω
ω
ω
5.
Różniczkujący
rzeczywisty
Im
Re
ω=∞
ω=0
k
|G
(j
ω
1
)|
ω
1
1
)
(
1
)
(
2
2
1
1
1
+
=
+
=
T
k
j
G
T
j
kj
j
G
ω
ω
ω
ω
ω
ω
1.7.
Instrukcja wykonania ćwiczenia
Ć
wiczenie składa się z dwóch części:
A – Identyfikacja obiektów sterowania metodą charakterystyk czasowych
B - Identyfikacja obiektów sterowania metodą charakterystyk częstotliwościowych
A. Identyfikacja obiektów
sterowania metodą charakterystyk czasowych
Wyznaczenie charakterystyk czasowych odbywa się w układzie pokazanym na rys. 1.27.
Generator
standardowych
funkcji
wymuszaj
ą
cych
Obiekt badany
Rejestrator
oscyl.
x(t)
y(t)
Rys.1.27. Ogólny układ wyznaczania charakterystyk czasowych.
W ćwiczeniu jako obiekty dynamiczne użyto modeli elektrycznych różnych transmitancji.
Obiekty są w postaci tzw. „czarnych skrzynek” z wyodrębnionymi tylko wejściami i wyjściami.
W ćwiczeniu wykorzystywany jest generator fali prostokątnej. W zależności od doboru czasu
trwania impulsu w stosunku do stałych czasowych obiektu sygnał wymuszający można
traktować jako skok jednostkowy bądź impuls prostokątny. Do rejestracji odpowiedzi obiektów
na wymuszenia zastosowano oscyloskop dwukanałowy tak, żeby obserwować jednocześnie
przebiegi wymuszenia i odpowiedzi. W przypadku „wolnych” obiektów należy użyć rejestratora
wolnych przebiegów.
Przebieg ćwiczenia:
1.
Połączyć układ pomiarowy zgodnie z rys. 1.27.
22
2.
Zaobserwować i narysować odpowiedź skokową poszczególnych obiektów przy
odpowiednim wyskalowaniu oscyloskopu bądź rejestratora oraz wstępnym określeniu
parametrów wymuszenia.
3.
Na podstawie charakterystyk czasowych, określić charakter badanego obiektu ( postać jego
transmitancji zastępczej) oraz oszacować jej parametry.
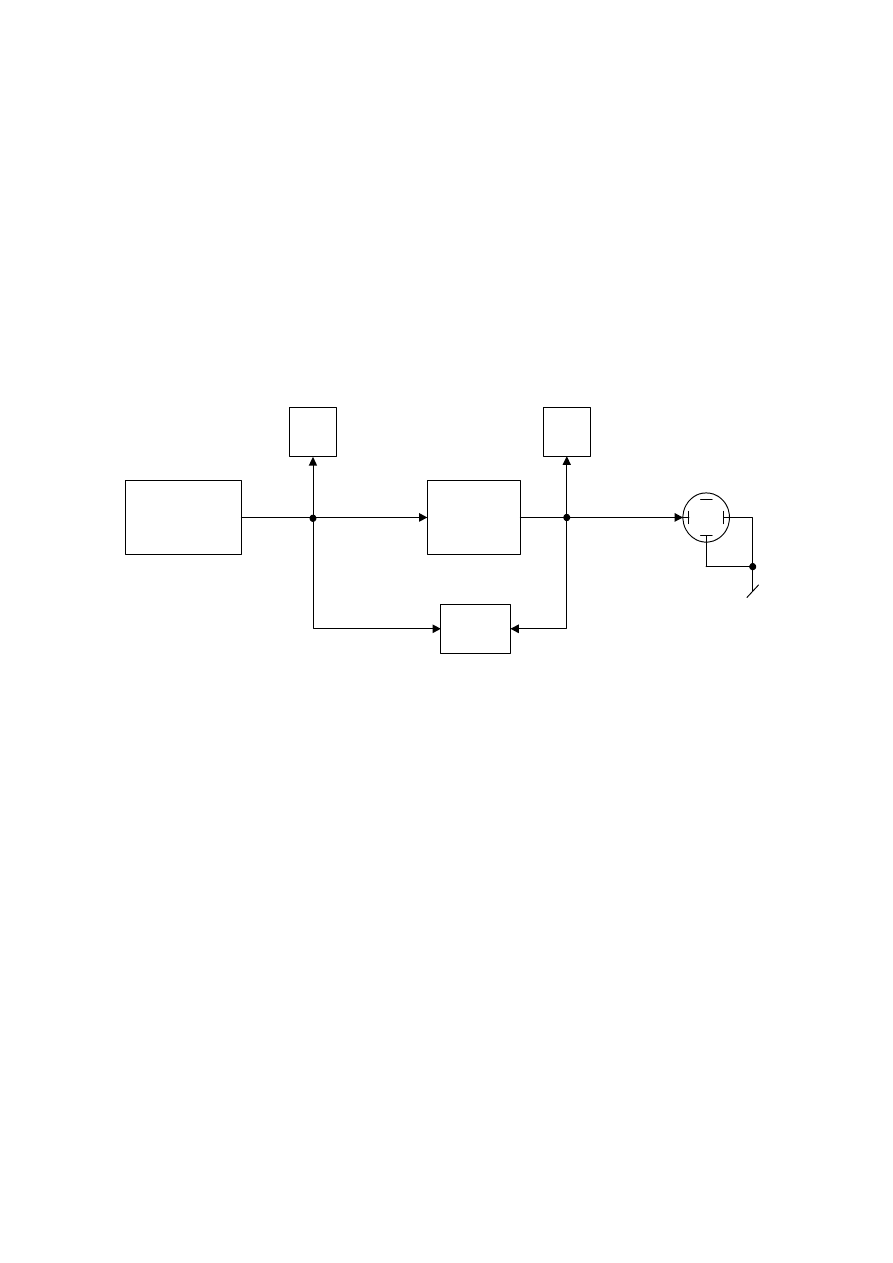
B. Identyfikacja
obiektów
sterowania metodą charakterystyk częstotliwościowych
Charakterystyki częstotliwościowe wyznacza się w układzie pomiarowym przedstawionym
na rys. 1.28.
OBIEKT
BADANY
Generator sygnałów
harmonicznych
x(t)=X
0
sin
ω
t
Fazomierz
V
L
x(t)=X
0
sin
ω
t
V
L
y(t)=Y
0
sin
ω
t
oscyl.
Rys. 1.28. Układ pomiarowy do wyznaczania charakterystyk częstotliwościowych.
W powyższym układzie pomiarowym do pomiaru przesunięcia fazowego pomiędzy
harmonicznym sygnałem wejściowym a harmonicznym sygnałem wyjściowym wykorzystano
fazomierz. Stosunek wskazań woltomierza na wyjściu do wskazań woltomierza na wejściu daje
moduł transmitancji widmowej obiektu dla danej pulsacji (poszczególnych pomiarów
dokonywać należy w stanie ustalonym dla określonej
ω
i
).
Przebieg ćwiczenia:
1.
Przy pomocy dostępnych przyrządów pomiarowych połączyć układ badawczo-pomiarowych
z rysunku 1.28.
2.
Wybrać wartości pulsacji i dla nich pomierzyć wartości modułu (stosunek amplitud sygnału
wejściowego i wyjściowego) i przesunięcia fazowego.
3.
Poszczególne pomiary umieścić w tabelce i po koniecznych wyliczeniach narysować na jej
podstawie charakterystyki częstotliwościowe (amplitudowo-fazową i logarytmiczne
amplitudy i fazy). UWAGA!!!: Zwrócić uwagę na znak fazy.
4.
Na podstawie uzyskanych charakterystyk (charakterystyki logarytmiczne aproksymować
łamaną) zaproponować postać transmitancji obiektu oraz określić jej parametry.
5.
Zaproponować realizację (strukturę wewnętrzną) modelu obiektu na elementach RLC tzn.
narysować schemat i podać wartości elementów.

23
Literatura
1.
Amberski K., Marusak A., śydanowicz: Laboratorium teorii regulacji, W-wa, 1974
2.
Campbell D. P.: Dynamika procesów, PWN, W-wa 1962
3.
Górecki H.: Analiza układów regulacji z opóźnieniem. WNT, W-wa 1971
4.
Findeisen W.: Technika regulacji automatyka, PWN, W-wa. 1965
5.
Kaczorek T., Teoria sterowania, T1, PWN, W-wa 1977
6.
Mańczak K.: Metody identyfikacji wielowymiarowych obiektów sterowania, WNT, W-wa
1968
7.
Nowacki P., Szklarski L., Górecki H.: Podstawy teorii układów regulacji automatycznej, T1,
PWN, W-wa 1976
8.
Ordyncew W.: Opis matematyczny obiektów regulacji automatycznej, WNT, W-wa 1968
9.
Poradnik inżyniera automatyka, WNT, W-wa 1973
10.
Węgrzyn S.: Podstawy automatyki, PWN, W-wa 1979.
Wyszukiwarka
Podobne podstrony:
EZ CW 1 IDENT
EZ CW 2 UKLOG
EZ CW 4 SWIATLA id 166901 Nieznany
EZ CW 5 IMPULS
EZ CW 3 PID
EZ CW 2 UKLOG
EZ CW 4 ŚWIATŁA
EZ CW 2 UKLOG
EZ CW 3 PID
HAR CW LAB EZ
ćw 4 Profil podłużny cieku
biofiza cw 31
Kinezyterapia ćw synergistyczne
Cw 1 ! komorki
Pedagogika ćw Dydaktyka
Cw 3 patologie wybrane aspekty
więcej podobnych podstron