
POLITECHNIKA ŚLĄSKA W GLIWICACH
WYDZIAŁ INŻYNIERII ŚRODOWISKA i ENERGETYKI
INSTYTUT MASZYN i URZĄDZEŃ ENERGETYCZNYCH
IDENTYFIKACJA PARAMETRÓW TRANSMITANCJI
Laboratorium automatyki
(A – 1)
Opracował: dr
inż. Grzegorz Wiciak
Sprawdził: dr
inż. Jerzy Widenka
Zatwierdził:
dr hab. inż. Janusz Kotowicz
2
1
Temat ćwiczenia
:
Identyfikacja transmitancji elementów automatyki.
Cel ćwiczenia
Celem ćwiczenia jest wyznaczenie parametrów transmitancji metodą charakterystyk
skokowych.
Przedmiot badań:
4. Termoelement Ni-NiCr o zakresie pomiarowym 0 – 1200
o
C, umieszczony w
metalowej rurce zanurzony we wrzącej wodzie.
4. Oscylacyjny układ mechaniczny.
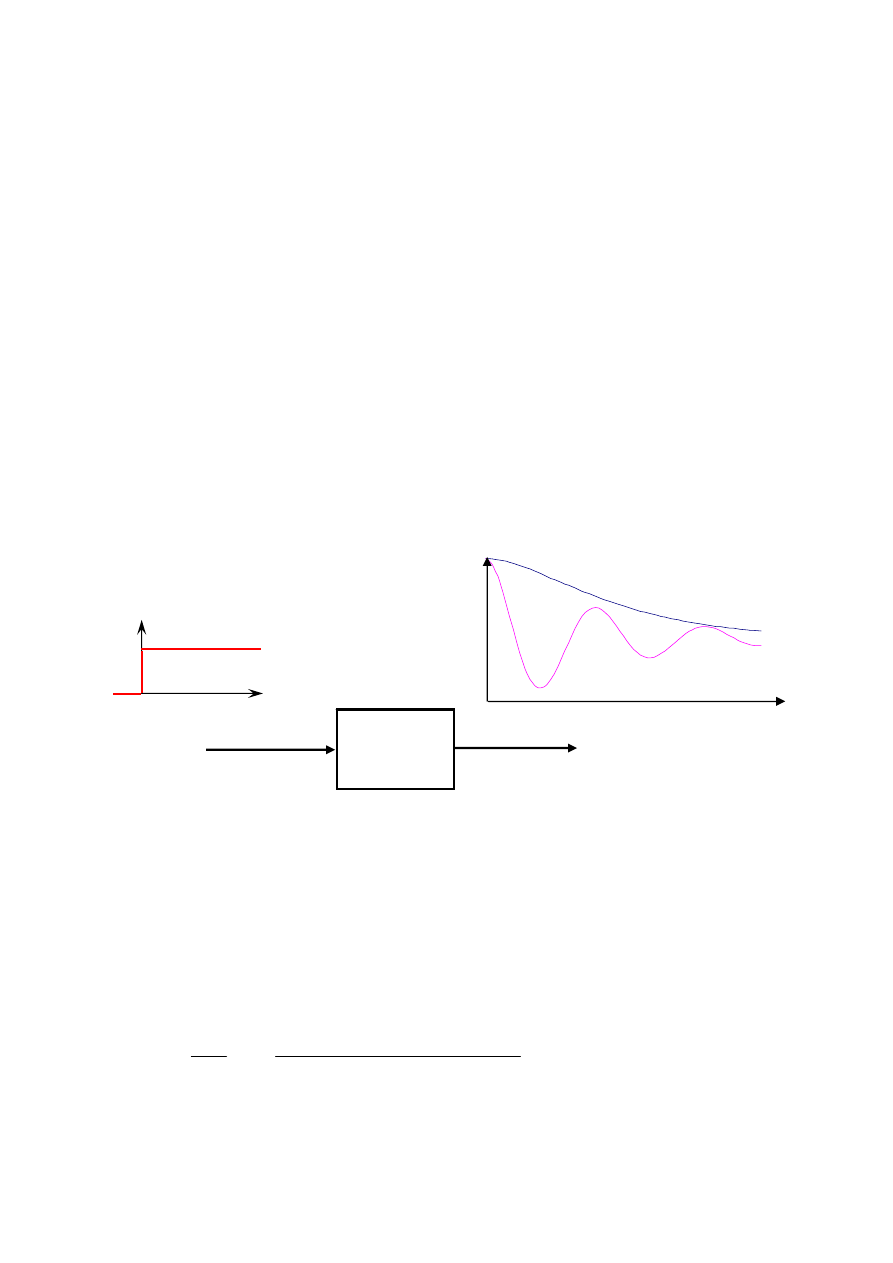
1.1 Opis metody.
Metoda polega na wymuszeniu skokowej zmiany na wejściu elementu i rejestracji przebiegu
czasowego sygnału wyjściowego aż do osiągnięcia stanu ustalonego (rysunek poniżej).
y
x
τ
τ
y
x
Badany element
Na wyjściu elementu można uzyskać dwa różne jakościowo przebiegi:
-monotoniczny
-oscylacyjny.
1.2 Monotoniczny przebieg sygnału wyjściowego.
W ogólnym przypadku monotoniczny przebieg charakterystyki skokowej odpowiada
transmitancja:
(
)
(
)(
)
0
s
M
2
M
1
L
1
e
.....
1
s
T
1
s
T
.....
1
s
T
k
x
y
τ
−
+
+
+
=
∆
∆
gdzie: k
współczynnik wzmocnienia
3
0
τ
s
e
−
opóźnienie
Metoda ta pozwala wyznaczyć główną stałą czasową mianownika jeżeli pozostałe stałe czasowe są
istotnie mniejsze od niej, a po wyznaczeniu T
1M
można oszacować opóźnienie
τ
0.
Dla skokowej zmiany sygnału wejściowego :
)
(
1
)
(
0
τ
τ
x
x
=
∆
odpowiedź elementu opisuje równanie:
)
(
1
kx
......
e
A
e
A
1
)
(
y
0
0
T
2
T
1
M
2
0
M
1
o
τ
−
τ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
−
−
=
τ
∆
τ
−
τ
−
τ
−
τ
−
Stałe A
1
, A
2
… mogą być ujemne lub dodatnie.
∆y
τ
0
τ
kx
0
B
Jeżeli po pewnym przedziale czasu o przebiegu decyduje główna stała czasowa np. T
1M
, to z
równania charakterystyki skokowej wynika że w tym przedziale przebieg opisuje równanie:
0
T
1
kx
e
A
1
)
(
y
M
1
o
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
τ
∆
τ
−
τ
−
Z tego równania wynika:
M
1
0
1
0
0
T
A
ln
kx
)
(
y
kx
ln
τ
−
τ
−
=
τ
∆
−
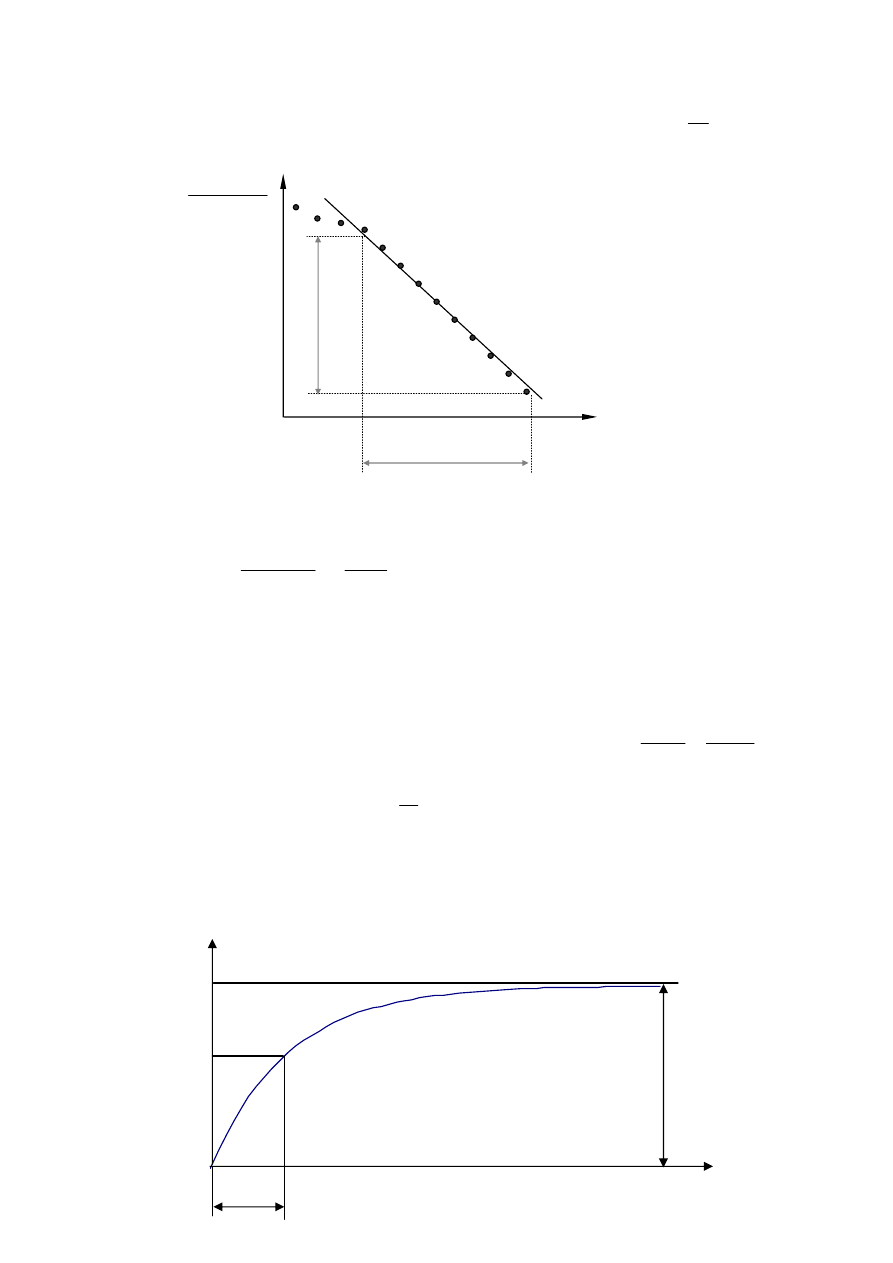
Wartość w licziku logarytmu naturalnego oznaczonona rysunku literą B.
Stąd wynika że na wykresie półlogarytmicznym ,
τ punkty pomiarowe powinny
w pewnym przedziale tworzyć prostą.
0
0
kx
)
(
y
τ
kx
ln
∆
−
4
Z nachylenia prostej można wyznaczyć wartość stałej czasowej T
1M
, to znaczy:
M
T
C
D
1
=
0
0
kx
)
(
y
kx
ln
τ
∆
−
C
τ
D
Wartość współczynnika wzmocnienia k można określić dzieląc wartość charakterystyki skokowej
w stanie ustalonym przez wartość skoku na wejściu:
0
0
0
x
kx
x
)
(
y
k
=
∞
∆
=
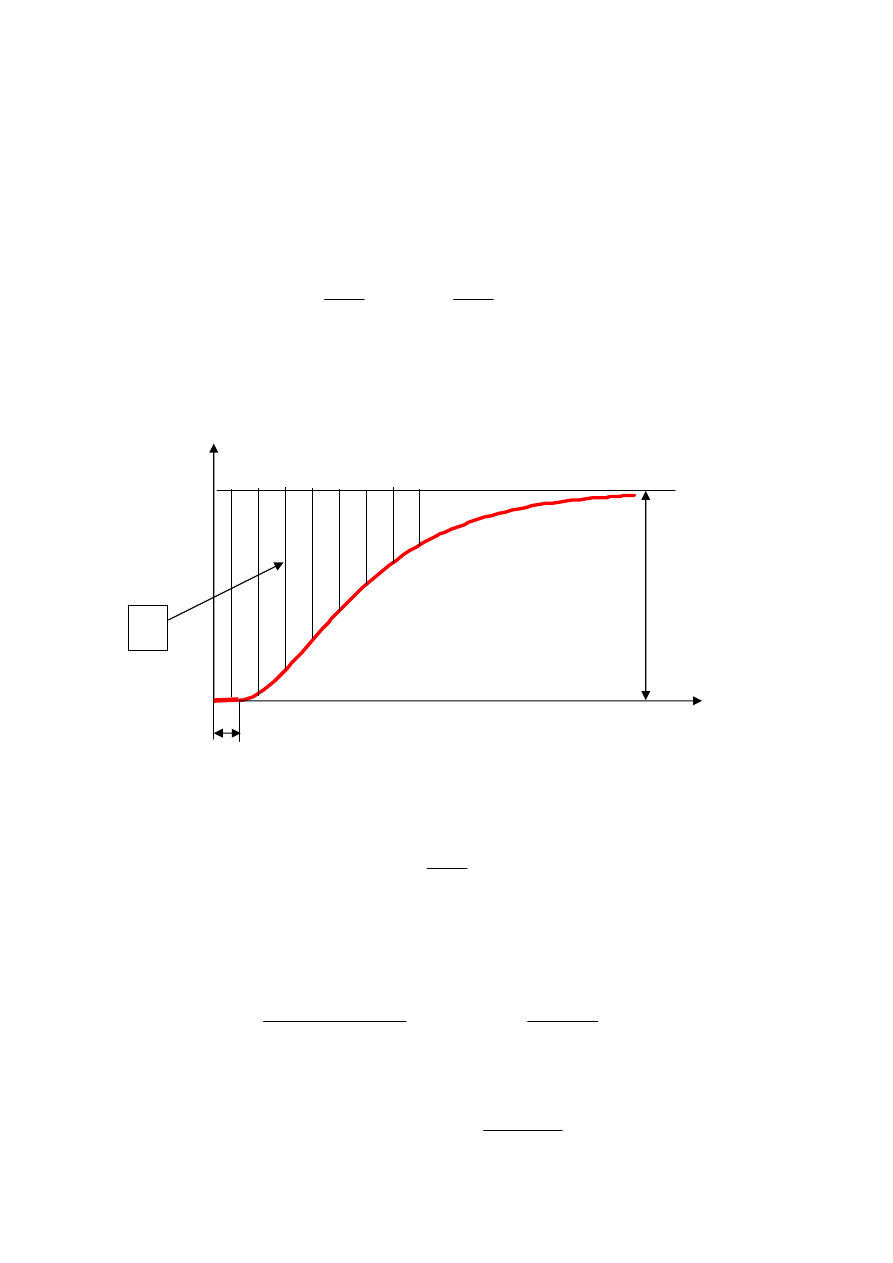
Uproszczona metoda wyznaczenia stałej czasowej.
Jeżeli charakterystyka skokowa jest zbliżona do charakterystyki elementu inercyjnego I-go rzędu
(brak opóźnienia i małe przegięcie w początku układu) to stałą czasową można wyznaczyć w
prosty sposób.
1
Ts
k
)
s
(
x
)
s
(
y
+
=
∆
∆
Charakterystykę skokową elementu inercyjnego I-rzędu o transmitancji
dla skokowej zmiany na wejściu
)
(
1
x
)
(
x
0
τ
=
τ
∆
ma postać:
Dla otrzymuje się:
0
T
x
)
e
1
(
k
)
(
y
τ
−
−
=
τ
∆
0
kx
63
,
0
)
T
(
y
=
∆
T
=
τ
Stała czasowa określa przedział czasu po którym charakterystyka skokowa osiąga wartość 63%
stanu ustalonego.
kx
0
0,63kx
0
T
τ
∆y
5
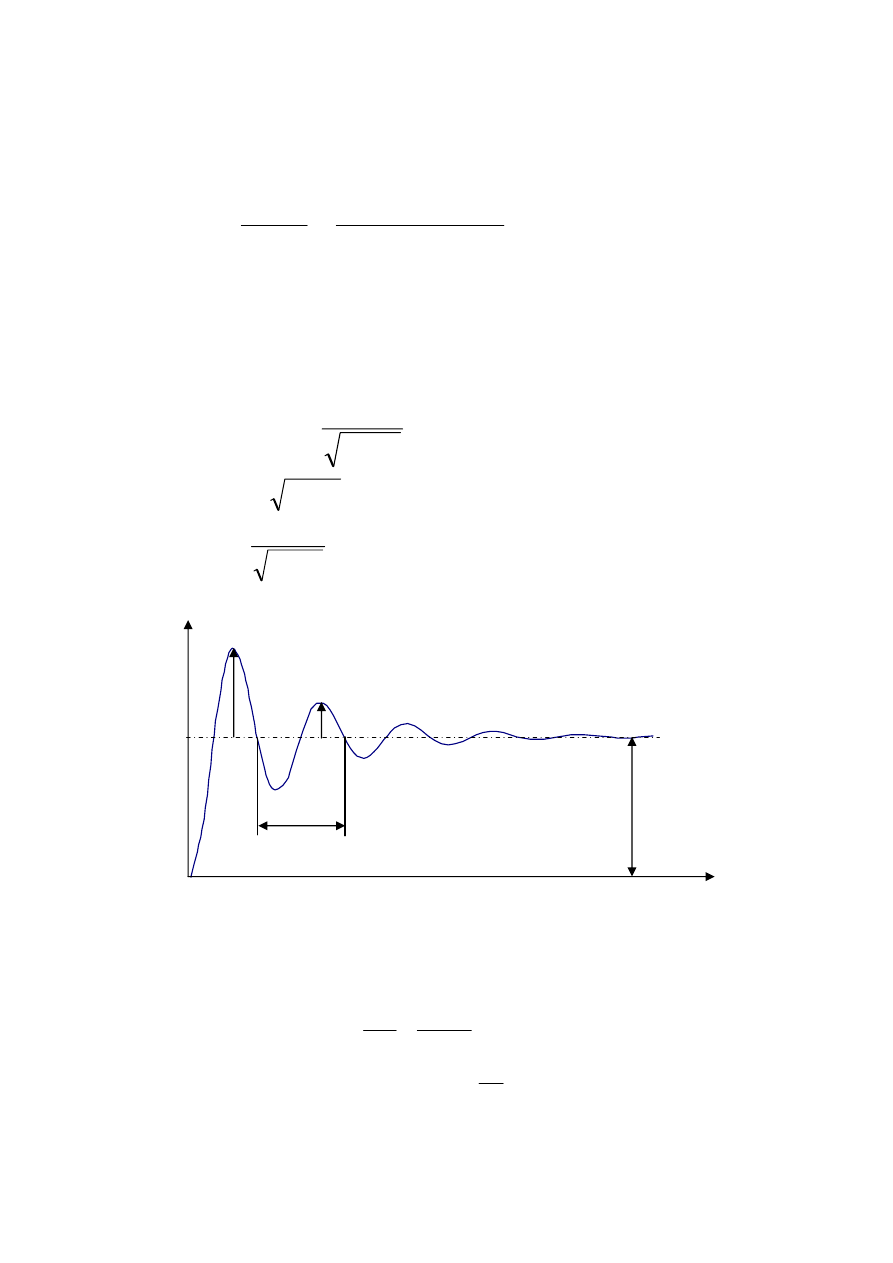
1.3 Przebieg oscylacyjny.
W tym przypadku zakładamy transmitancję elementu oscylacyjnego:
2
0
2
2
2
0
0
2
)
(
)
(
ω
ξω
ω
+
+
=
∆
∆
s
s
k
S
x
s
y
gdzie: k- współczynnik wzmocnienia
ξ- liczba tłumienia
ω
0
– częstość drgań nietłumionych
Dla wymuszenia skokowego
)
(
1
)
(
0
τ
τ
x
x
=
∆
charakterystyka skokowa ma postać:
))
cos(
1
1
(
)
(
2
0
ϕ
ωτ
ξ
τ
ξτ
−
−
−
=
∆
−
e
x
k
y
gdzie:
2
0
1
ξ
ω
ω
−
=
- częstość drgań tłumionych
2
1
ξ
ξ
ϕ
−
=
tg
arc
- przesunięcie fazowe
∆y
T
0
A
2
A
1
kx
0
τ
Parametry transmitancji wyznaczamy na podstawie wartości A
1 ,
A
2 ,
T
0 ,
kx
0.
A
1 ,
A
2
są wartościami różnicy
0
kx
)
(
y
)
(
A
−
τ
∆
=
τ
dla czasów
τ
1
i
τ
2
różniących się okresem
drgań T
0
(
).
0
1
2
T
=
τ
−
τ
-Współczynnik wzmocnienia:
0
0
0
x
)
(
y
x
kx
k
∞
∆
=
=
-
Wartość liczby tłumienia
ξ
wyznaczamy z ilorazu
1
2
A
A
Korzystając z wzoru charakterystyki skokowej , otrzymuje się:
6
)
(
1
2
1
2
1
2
0
1
0
2
0
e
)
cos(
e
)
cos(
e
A
A
τ
−
τ
ξω
−
τ
ξω
−
τ
ξω
−
=
ϕ
−
ωτ
ϕ
−
ωτ
=
Zależność między ω i ω
0
oraz równanie
π
=
τ
−
τ
ω
2
)
(
1
2
0
sprowadzić powyższy wzór do
postaci:
2
1
2
1
2
e
A
A
ξ
−
πξ
−
=
Stąd można wyznaczyć liczbę tłumienia
ξ .
-Dla znanych wartości
ξ
i
0
T
2
π
=
ω
można obliczyć
ω
0 .
1.4 Przebieg pomiarów:
a) Pomiar charakterystyki skokowej termoelementu.
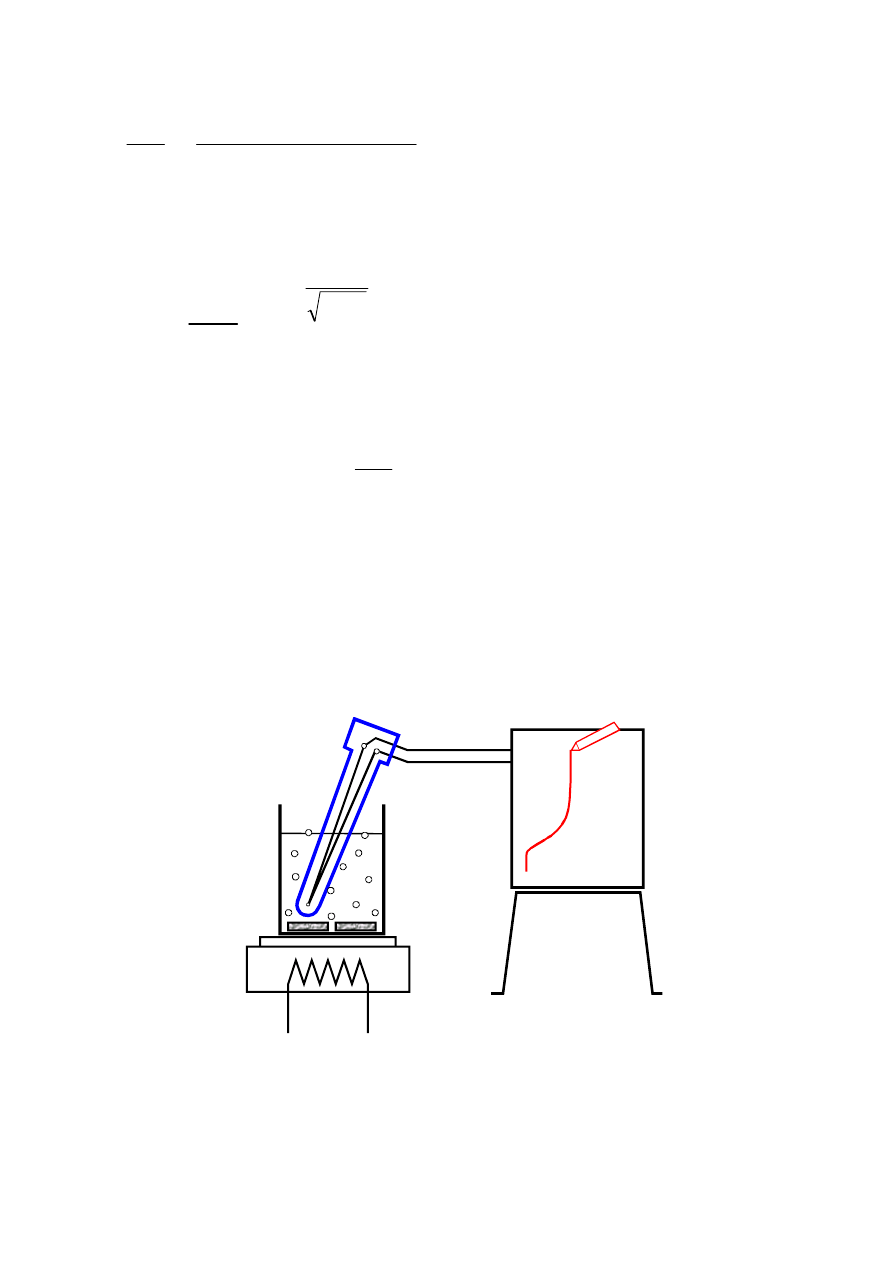
Stanowisko pomiarowe składa się z termometru, rejestratora temperatury z nastawialnym
posuwem taśmy, naczynia z wodą wrzącą stojącego na kuchence elektrycznej,
Na początku termometr wraz z osłoną posiadała temperaturę ustaloną równą temperaturze
otoczenia. Włączamy napęd taśmy rejestratora. Termometr wkładamy do wrzącej wody.
Rejestrator rejestruje wskazania termometru (jego charakterystykę czasową dla wymuszenia
skokowego).
Rys. 1.1. Stanowisko do pomiaru charakterystyki czasowej termometru
7
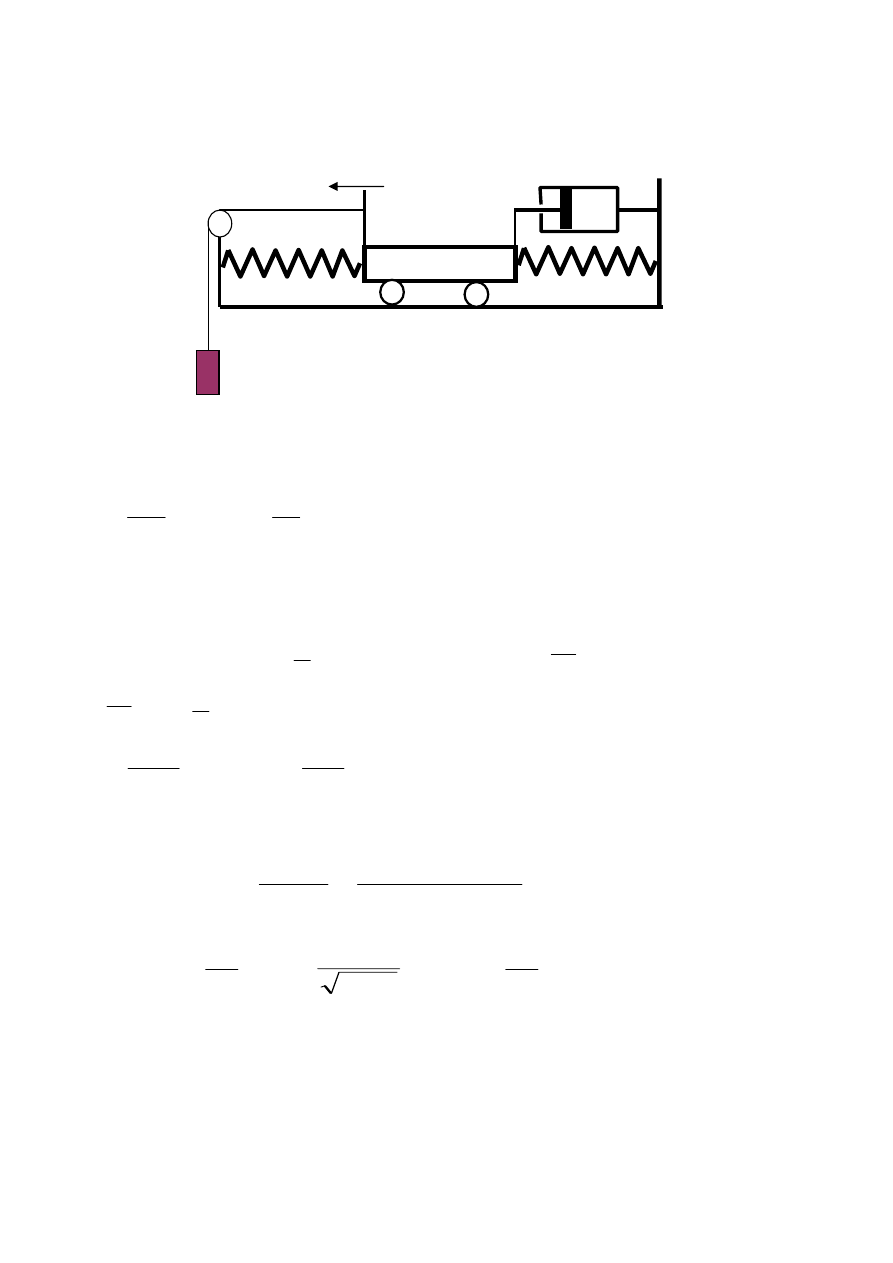
b) Identyfikacja transmitancji układu mechanicznego.
b
y
m
c
c
Q
Rys . 1.2 Stanowisko do pomiaru charakterystyki skokowej układu mechanicznego.
Równanie ruchu układu ma postać:
cy
2
d
dy
b
)
(
Q
d
y
d
m
2
2
−
τ
−
τ
=
τ
gdzie: m – całkowita masa układu
b – współczynnik tarcia płynnego
c – stała sprężyny
Q – ciężar obciążnika
Zakładając że
)
(
y
y
)
(
y
τ
∆
+
=
τ
oraz
)
(
Q
Q
)
(
Q
τ
∆
+
=
τ
(wartości nadkreślone odnoszą się do stanu ustalonego) i uwzględniając że
y
c
2
Q
=
otrzymuje się równanie dla przyrostów:
y
c
2
d
y
d
b
)
(
Q
d
y
d
m
2
2
∆
−
τ
∆
−
τ
∆
=
τ
∆
Stąd wynika transmitancja:
2
0
2
2
2
0
s
2
s
k
)
s
(
Q
)
s
(
y
0
ω
+
ξω
+
ω
=
∆
∆
gdzie:
c
2
1
k
=
,
mc
2
b
=
ξ
,
m
c
2
2
0
=
ω
Ponieważ wygodniej jest wymuszać wstępne przesunięcie
)
0
(
y
∆
zamiast skokowej zmiany
obciążenia (
, uwzględniając to przy transformacji równania ruchu dla przyrostów ,
otrzymuje się:
)
0
Q
=
∆
)
s
(
y
c
2
)]
0
(
y
)
s
(
y
s
[
b
)]
0
(
y
s
)
s
(
y
s
[
m
2
∆
−
∆
−
∆
−
=
∆
−
∆
Korzystając z podanych wcześniej wzorów, otrzymuje się:
8
2
0
0
2
0
s
2
s
2
s
)
0
(
y
)
s
(
y
ω
+
ξω
+
ξω
+
∆
=
∆
Przebieg czasowy
opisuje równanie:
)
(
y
τ
∆
)
cos(
1
e
)
0
(
y
)
(
y
2
0
ϕ
−
ωτ
ξ
−
∆
=
τ
∆
τ
ξω
−
gdzie:
2
0
1
ξ
−
ω
=
ω
2
1
arctg
ξ
−
ξ
=
ϕ
-Ponieważ w przebiegu czasowym
)
(
y
τ
∆
nie występuje współczynnik wzmocnienia
transmitancji k , można z niego wyznaczyć tylko wartości
ξ
i
0
ω
zgodnie ze sposobem
opisanym wyżej dla charakterystyki skokowej.
-Współczynnik wzmocnienia k wyznaczamy obciążając układ różnymi ciężarami Q i mierząc
odpowiadające im przesunięcia y. Dla każdej pary Q oraz y wyznaczamy k
Q
y
k
=
, a następnie wartość średnią.
2 Dodatek teoretyczny:
Wyprowadzenie wzoru na transmitancję termometru.
Przyjęto założenia: -
Przyjmujemy następujące (przybliżone) równanie różniczkowe opisujące dynamikę zmian
temperatury termometru po włożeniu go do wody:
τ
ϑ
ϑ
ϑ
d
d
mc
R
t
t
w
=
−
(2.1)
Gdzie:
w
w
w
ϑ
ϑ
ϑ
∆
+
=
t
t
t
ϑ
ϑ
ϑ
∆
+
=
0
=
−
t
w
ϑ
ϑ
τ
czas
w
ϑ
temperatura wody (temperatura mierzona – sygnał wejściowy)
t
ϑ
temperatura termometru (temperatura wskazywana – sygnał wyjściowy)
R
opór cieplny przepływu ciepła od wody do termometru
m
masa termometru biorąca udział w procesie nagrzewania
c ciepło właściwe termometru
Temperatura jest mierzona termoparą Ni-NiCr. Zimne końce termopary stykają się z
powietrzem otoczenia, dlatego zakładamy, że mają temperaturę otoczenia. Termopara wskazuje
nadwyżkę temperatury ponad temperaturę otoczenia. W temperaturze otoczenia wskazania tej
termopary są równe zero.
9
Równanie (2.1) napisano przyjmując następujące założenia:
w chwili początkowej τ = 0 przed włożeniem termometru do wody temperatura
termometru jest ustalona i równa temperaturze otoczenia
termometr nie odprowadza ciepła do otoczenia, dlatego dopływ ciepła do
termometru jest równy akumulacji ciepła w termometrze.
Wyrażenie
R
t
w
ϑ
ϑ −
jest równe strumieniowi ciepła dopływającego od wody do
termometru, a wyrażenie
τ
ϑ
d
d
mc
t
przedstawia akumulację ciepła w termometrze.
Wstawiając w miejsce pochodnej
τ
d
d
operator Laplace’a „s” otrzymamy następujące równanie
operatorowe:
)
(
)
(
)
(
s
s
mc
R
s
s
t
t
w
ϑ
ϑ
ϑ
∆
⋅
⋅
=
∆
−
∆
(2.2)
Po wykonaniu następujących przekształceń
)
(
)
(
)
(
s
s
s
s
Rmc
t
w
t
ϑ
ϑ
ϑ
∆
−
∆
=
∆
⋅
⋅
wprowadzamy stałą czasową termometru
T = Rּmּc
(2.3)
)
(
)
(
)
1
(
s
s
s
T
w
t
ϑ
ϑ
∆
=
∆
⋅
+
⋅
otrzymamy wzór na transmitancję termometru
1
1
)
(
)
(
)
(
+
⋅
=
∆
∆
=
s
T
s
s
s
G
w
t
ϑ
ϑ
(2.4)
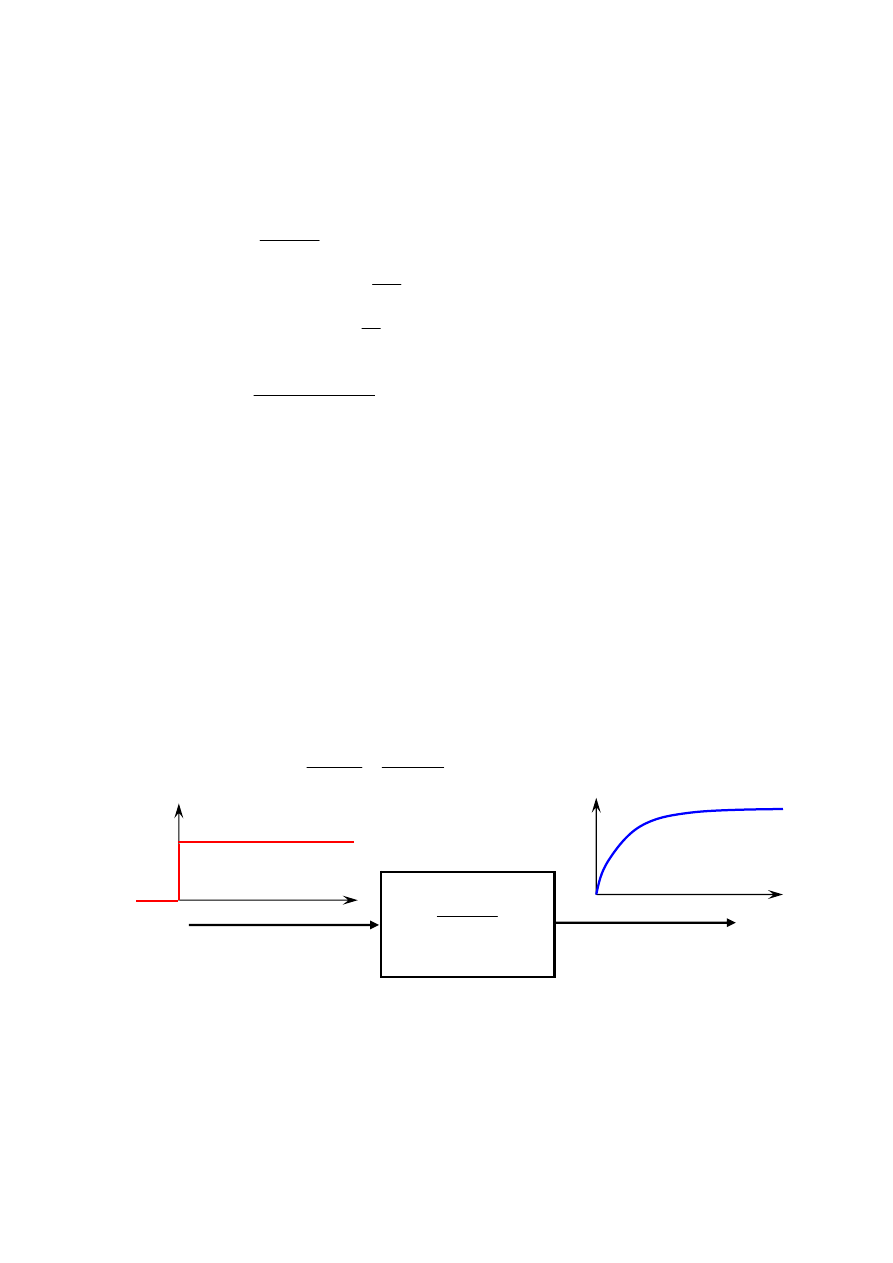
y(s)=
∆ϑ
w
(s)
x(s)=
∆ϑ
w
(s)
1
1
+
Ts
Rys. 2 Termometr jako element automatyki
Element automatyki o transmitancji opisanej wzorem (2.4) jest nazywany elementem
inercyjnym pierwszego rzędu.
10
Wyprowadzenie wzoru na charakterystykę czasową termometru.
Po włożeniu termometru do wrzącej wody temperatura zewnętrzna zimnego końca
termopary zmienia się skokowo od temperatury otoczenia do temperatury 100
o
C. Tę zmianę
temperatury zewnętrznej, stanowiącej sygnał wejściowy oznaczany zwykle przez x(
τ) można
zapisać za pomocą funkcji skokowej jednostkowej:
)
(
1
)
(
)
(
)
(
τ
ϑ
τ
ϑ
τ
⋅
∞
∆
=
∆
=
w
w
x
s
s
s
x
w
w
1
)
(
)
(
)
(
⋅
∞
∆
=
∆
=
ϑ
ϑ
Wskazanie termometru, czyli sygnał wyjściowy y(
τ) obliczamy z równań:
)
(
1
1
)
(
)
(
s
Ts
s
s
y
w
t
ϑ
ϑ
∆
⋅
+
=
∆
=
(2.5)
s
Ts
s
s
y
w
t
1
)
(
1
1
)
(
)
(
⋅
∞
∆
⋅
+
=
∆
=
ϑ
ϑ
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
∞
∆
=
∆
=
−
T
w
t
e
y
τ
ϑ
τ
ϑ
τ
1
)
(
)
(
)
(
(2.6)
Wykres charakterystyki czasowej termometru dla przedstawiono na rys. 3.
Właściwości charakterystyki czasowej elementu inercyjnego pierwszego rzędu (termometru).
Dla czasu τ = 0 początkowa wartość sygnału wyjściowego jest równa zero.
[ ]
0
1
1
)
(
1
)
(
)
0
(
)
0
(
0
=
−
⋅
∞
∆
=
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
∞
∆
=
∆
=
−
w
T
w
t
e
y
ϑ
ϑ
ϑ
(2.7)
Dla czasu
∞
=
τ
ustalona wartość sygnału wyjściowego jest równa
[
]
)
(
0
1
)
(
1
)
(
)
(
)
(
∞
∆
=
−
⋅
∞
∆
=
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
∞
∆
=
∞
∆
=
∞
∞
−
w
w
T
w
t
e
y
ϑ
ϑ
ϑ
ϑ
(2.8)
Dla czasu równego stałej czasowej
T
=
τ
wartość sygnału wyjściowego jest równa 63,2%
wartości sygnału w stanie ustalonym.
[
]
)
(
632
,
0
1
)
(
1
)
(
)
(
)
(
1
∞
∆
⋅
≅
−
⋅
∞
∆
=
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
∞
∆
=
∆
=
−
−
w
w
T
T
w
t
e
e
T
T
y
ϑ
ϑ
ϑ
ϑ
(2.9)
Dla czasu równego
wartość sygnału wyjściowego jest równa 95% wartości
sygnału w stanie ustalonym, a dla czasu
T
3
⋅
=
τ
T
5
⋅
=
τ
wartość sygnału wyjściowego jest równa 99%
wartości sygnału w stanie ustalonym.
[
]
)
(
95
,
0
1
)
(
1
)
(
)
3
(
)
3
(
3
3
∞
∆
⋅
≅
−
⋅
∞
∆
=
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
∞
∆
=
∆
=
−
−
w
w
T
T
w
t
e
e
T
T
y
ϑ
ϑ
ϑ
ϑ
(2.10)
11
Pochodna sygnału wyjściowego względem czasu jest równa.
)
(
1
1
)
(
)
(
∞
∆
⋅
⎥
⎦
⎤
⎢
⎣
⎡
⋅
=
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
∞
∆
=
−
−
w
T
T
w
e
T
e
d
d
y
d
d
ϑ
τ
ϑ
τ
τ
τ
τ
(2.11)
Dla czasu τ = 0 wartość pochodnej sygnału wyjściowego jest równa
)
(
)
(
)
(
1
)
(
0
0
α
ϑ
ϑ
τ
τ
τ
tg
T
e
T
y
d
d
w
w
T
=
∞
∆
=
∞
∆
⋅
⎥
⎦
⎤
⎢
⎣
⎡
⋅
=
⎥⎦
⎤
⎢⎣
⎡
−
=
(2.11)
Pochodna sygnału wyjściowego równa tangensowi kąta nachylenia stycznej do
charakterystyki czasowej, dlatego styczna pozwala wyznaczyć stałą czasową termometru. Odcinek
pod styczną od punktu styczności do punktu przecięcia stycznej z asymptotą odpowiadającą
stanowi ustalonemu jest równy stałej czasowej T (rys. 3).
Tę samą właściwość ma styczna wykreślona w dowolnym innym punkcie charakterystyki,
ale dokładność wyznaczenia stałej czasowej zmniejsza się wraz ze zmniejszeniem się kąta
nachylenia stycznej.
Przebieg czasowy temperatury mierzonej
)
(
w
τ
ϑ
)
(
w
∞
ϑ
czas
τ
Przebieg temperatury wskazywanej przez termometr
)
(
t
τ
ϑ
)
(
632
,
0
t
∞
⋅ ϑ
)
(
t
∞
ϑ
T
czas
τ
Rys. 3. Charakterystyka czasowa termometru
T
12
Wyprowadzenie wzoru na charakterystykę czasową termometru dla wymuszenia liniowego.
Włączamy piec elektryczny i mierzymy temperaturę wewnątrz tego pieca. Jeżeli straty
ciepła do otoczenia są małe, to temperatura wewnątrz pieca zwiększa się według funkcji liniowej
)
(
a
)
(
x
τ
τ
τ
1
⋅
⋅
=
(2.12)
gdzie współczynnik „a” wyraża szybkość zmiany temperatury w czasie. Funkcji czasowej x(τ)
odpowiada funkcja operatorowa x(s) równa:
2
s
1
a
)
s
(
x
⋅
=
(2.13)
Funkcja wyjściowa (wskazania termometru) w postaci operatorowej y(s) jest równa
iloczynowi transmitancji termometru i funkcji wymuszenia w postaci operatorowej
2
s
a
1
s
1
)
s
(
y
⋅
+
=
(2.14)
Funkcji operatorowej (2.14) odpowiada funkcja czasowa (2.15), a jej wykres
przedstawiono na rys. 4.
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
−
⋅
−
⋅
=
−
T
e
1
T
a
)
(
y
τ
τ
τ
(2.15)
Właściwości charakterystyki czasowej elementu inercyjnego pierwszego rzędu (termometru).
dla wymuszenia liniowego.
Dla czasu τ = 0 początkowa wartość sygnału wyjściowego jest równa zero.
( )
[
0
1
1
T
0
a
e
1
T
a
)
0
(
y
T
0
=
−
⋅
−
⋅
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
−
⋅
−
⋅
=
−
τ
]
(2.16)
Dla czasu równego
składowa wykładnicza jest mniejsza od 0,05, i może być
pominięta wobec liczby 1 od której jest odejmowana, dlatego przebieg sygnału wyjściowego
opisuje w przybliżeniu funkcja (2.17). Wskazania termometru są opóźnione w czasie o stałą
czasową T.
T
3
⋅
≥
τ
[ ]
[
T
a
e
1
T
a
)
(
y
T
T
3
T
3
−
⋅
≅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
−
⋅
−
⋅
=
−
≥
τ
τ
τ
τ
]
(2.17)
Różnica między temperaturą rzeczywistą i wskazaniami termometru dla czasu
T
3
⋅
≥
τ
jest równa
13
[
]
T
a
T
a
a
)
(
y
)
(
x
y
⋅
=
−
⋅
−
⋅
=
−
=
τ
τ
τ
τ
∆
(2.18)
Wzór (2.18) wyraża błąd dynamiczny pomiaru temperatury zwiększającej się liniowo w
czasie (błąd prędkościowy). Błąd dynamiczny zależy od szybkości zmiany temperatury oraz stałej
czasowej termometru.
Dla a = 0,1
s
C
o
, T = 100 s , błąd dynamiczny jest równy
C
10
100
1
,
0
y
o
=
⋅
=
∆
Dla a = 1
s
C
o
, T = 100 s , błąd dynamiczny jest równy
C
100
100
1
y
o
=
⋅
=
∆
T
3T
T
∆
y
y(
τ)
y(
τ)
x(
τ)
x(
τ)
czas
τ
Rys. 4 Charakterystyka czasowa termometru dla liniowej zmiany
temperatury mierzonej
14
3. Wyniki pomiarów oraz ich analiza
3.1
Wyniki pomiarów charakterystyki czasowej termometru.
Prędkość posuwu papieru w rejestratorze: 3 mm/s
Temperatura początkowa:
ϑ
p
= 20
o
C
Temperatura końcowa:
ϑ
k
= 100
o
C
Przyrost temperatury:
∆ϑ = 100 – 20 = 80
o
C
Przyrost temperatury wyrażony w „mm wykresu”
∆ϑ
mm
= 147 mm wykresu
Przyrost temperatury równy 63,2% przyrostu ustalonego wyrażony w „mm wykresu” 0,632ּ
∆ϑ
mm
= 0,632 ּ 147 = 93 mm wykresu
Stała czasowa wyznaczona metodą stycznej T
stycznej
= s
Stała czasowa wyznaczona metodą 63,2% przyrostu temperaturyj T
0,632%
= s
3.2
Ocena poprawności wyznaczenia stałej czasowej termometru.
Wyznaczoną stałą czasową wstawiamy do równania (2.6), które w przypadku wyrażania
temperatury w mm wykresu przyjmie postać (3.1):
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
⋅
=
−
T
mm
t
e
1
)
(
τ
ϑ
τ
ϑ
∆
∆
(3.1)
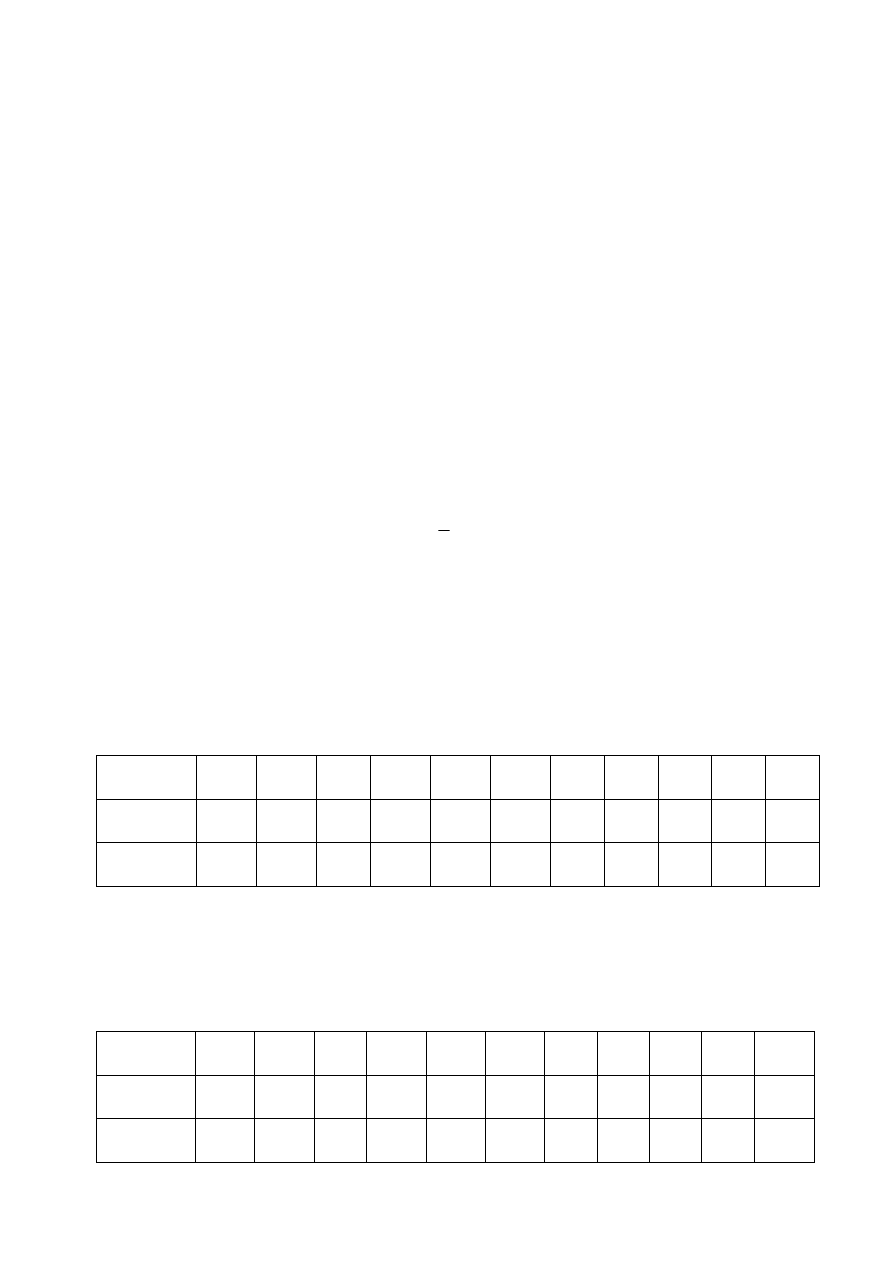
Obliczamy przyrosty temperatury termometru w mm wykresu w wybranych chwilach
czasu. Wyniki obliczeń zestawiono w tabelach Tab. 1 i Tab. 2. Obliczone punkty charakterystyki
nanosimy na wykres otrzymany z pomiarów i oceniamy, czy punkty charakterystyki
aproksymującej leżą blisko charakterystyki zmierzonej.
Tabela nr 1.
τ
⎥
⎦
⎤
⎢
⎣
⎡
wykresu
mm
5 10 15 20 25 30 35 40 45 50 55
τ[sek]
1,67 3,33 5 6,67 8,33 10 11,67 13,33
15 16,67 18,33
Θ
y
⎥
⎦
⎤
⎢
⎣
⎡
wykresu
mm
119,24 141,76 146,0 146,81 146,96 146,99 147,0 147,0 147,0 147,0 147,0
Tabela nr 2.
T2 = 48 sek
100% = 149 mm
63,2% = 94 mm
τ
⎥
⎦
⎤
⎢
⎣
⎡
wykresu
mm
15 30 45 60 75 90 105
120
135
150
165
τ[sek]
5 10 15 20 25 30 35 40 45 50 55
Θ
y
⎥
⎦
⎤
⎢
⎣
⎡
wykresu
mm
14,54 27,65 39,45 50,09 59,68 68,32 76,10 83,11 89,43 95,13 100,26

15
4. Wnioski:
1. Wyznaczenie charakterystyki czasowej termometru bez osłony przez zanurzenie go we
wrzącej wodzie.
2. Z charakterystyki czasowej nr 1 wyznaczono metodą 63,2% przyrostu sygnału stałą czasową
T1 = 1 sek.
3. Dla T = 1 sek. obliczono z równania (1) przebieg oczekiwany temperatury (tabela nr 1) i
naniesiono odpowiednie punkty na wykres charakterystyki.
4. Obliczone punkty leżą blisko charakterystyki zmierzonej, wobec tego przyjmujemy, że stała
czasowa T dobrze odzwierciedla wyniki pomiaru.
5. Wykonano również pomiar charakterystyki czasowej tego samego termometru podczas
stygnięcia w powietrzu.
6. Stała czasowa tego termometru jest równa T2 =48 sek. i jest znacznie większa od stałej
czasowej charakterystyki zmierzonej przez zanurzenie termometru w wodzie.
7. Charakterystyka termometru zmierzona podczas stygnięcia w powietrzu znacznie różni się od
teoretycznej charakterystyki elementu inercyjnego 1 – ego rzędu. Prawdopodobnie jest to
spowodowane zmianą oporu wnikania ciepła w konwekcyjnej wymianie ciepła.
8. Zmierzyliśmy również charakterystykę czasową termometru w osłonie z rurki stalowej
nałożonej na termoparę, w której zawsze dokonuje się pomiaru w warunkach przemysłowych.
Document Outline
- IDENTYFIKACJA PARAMETRÓW TRANSMITANCJI
- Laboratorium automatyki
- Opracował: dr inż. Grzegorz Wiciak
- Sprawdził: dr inż. Jerzy Widenka
- Zatwierdził: dr hab. inż. Janusz Kotowicz
- Cel ćwiczenia
- Przedmiot badań:
- Zależność między ω i ω0 oraz równanie sprowadzić powyż
- Stąd można wyznaczyć liczbę tłumienia ξ .
- Przebieg pomiarów:
- Wyprowadzenie wzoru na transmitancję termometru.
- Wyprowadzenie wzoru na charakterystykę czasową termometru.
- Właściwości charakterystyki czasowej elementu inercyjnego pi
- Wyprowadzenie wzoru na charakterystykę czasową termometru dl
- Właściwości charakterystyki czasowej elementu inercyjnego pi
Wyszukiwarka
Podobne podstrony:
Identyfikacja parametrow transm Nieznany
Identyfikacja parametrów transmitancji
Identyfikacja parametrów transmisji
Identyfikacja parametrow DC id Nieznany
1 Identyfikacja obiektow sterow Nieznany (2)
02 Identyfikacja zachowan konsu Nieznany (2)
Badanie parametrow charakteryzu Nieznany (2)
1 Zastosowanie parametru predko Nieznany (2)
Identyfikacja Procesów Technologicznych, Identyfikacja parametrycznarekurencyjną metodą najmniejszyc
LAB 2 identyfikacja id 257786 Nieznany
Krytyczne parametry wzmacniacza Nieznany
3 Identyfikacja id 33700 Nieznany (2)
Monitorowanie parametrow sieci Nieznany
Analiza wplywu parametrow proce Nieznany (2)
Modelowanie parametrow akustycz Nieznany
Identyfikacja Procesów Technologicznych, Identyfikacja parametryczna obiektu dynamicznego (cz.1 i 2)
Identyfikacja Procesów Technologicznych, Identyfikacja parametryczna obiektów dynamicznych, Nr ?wicz
104 111 Podstawowe parametry wa Nieznany (2)
więcej podobnych podstron