
PYTANIA Z MECHANIKI TECHNICZNEJ STATYKA
(część teoretyczna)
1. Podaj i omów trzy prawa Newtona.
Podstawą mechaniki są trzy prawa Newtona sformułowane w 1687 r. mające fundamentalne
znaczenie w mechanice i wytrzymałości materiałów.
Pierwsza zasada dynamiki (zasada bezwładności)
Istnieje taki układ odniesienia, w którym jeżeli na ciało nie działa żadna siła, lub siły
działające na to ciało równoważą się, to ciało zachowuje stan spoczynku lub porusza się
ruchem jednostajnym po linii prostej.
∑Fi = 0 → v = const. (=0)
Taki układ nazywamy inercyjnym.
Prawo to orzeka, że ciało nie przyspiesza samo z siebie; przyspieszenie musi być
narzucone z zewnątrz. Ciała spoczywające dążą do przebywania w stanie spoczynku,
ciała poruszające się dążą do utrzymania tego ruchu bez zmiany prędkości. Ten opór
ciał wobec zmian stanu ruchu nazywa się bezwładnością (inercją).
Druga zasada dynamiki <zmienności ruchu>
Jeżeli na ciało o masie m działają siły niezrównoważone o wypadkowej F, to ciało
porusza się ruchem przyspieszonym z przyspieszeniem a, takim że a = F/m.
F=ma
Trzecia zasada dynamiki <akcji i reakcji>
Jeżeli ciało A działa na ciało B pewną siłą FAB, to ciało B działa na ciało A siłą FBA
równą co do wartości bezwzględnej, lecz przeciwnie skierowaną, co wyrażamy wzorem:
F
AB
= -F
BA
Siły te są jednakowe co do wielkości i skierowane przeciwnie, lecz nie znoszą się ani nie
równoważą, gdyż przyłożone są do różnych ciał.
Mechanika oparta o prawa Newtona w zupełności wystarcza do opisu wszystkich
zjawisk mechanicznych, w których występują prędkości znacznie niższe niż prędkości
światła – dotyczy to inżynierskich zastosowań mechaniki w budowie maszyn.
2. Podaj i omów zasady statyki.
Statykę, jako dział dynamiki oparto na następujących zasadach (aksjomatach), których się nie
udowadnia, a przyjmuje jako pewnik.
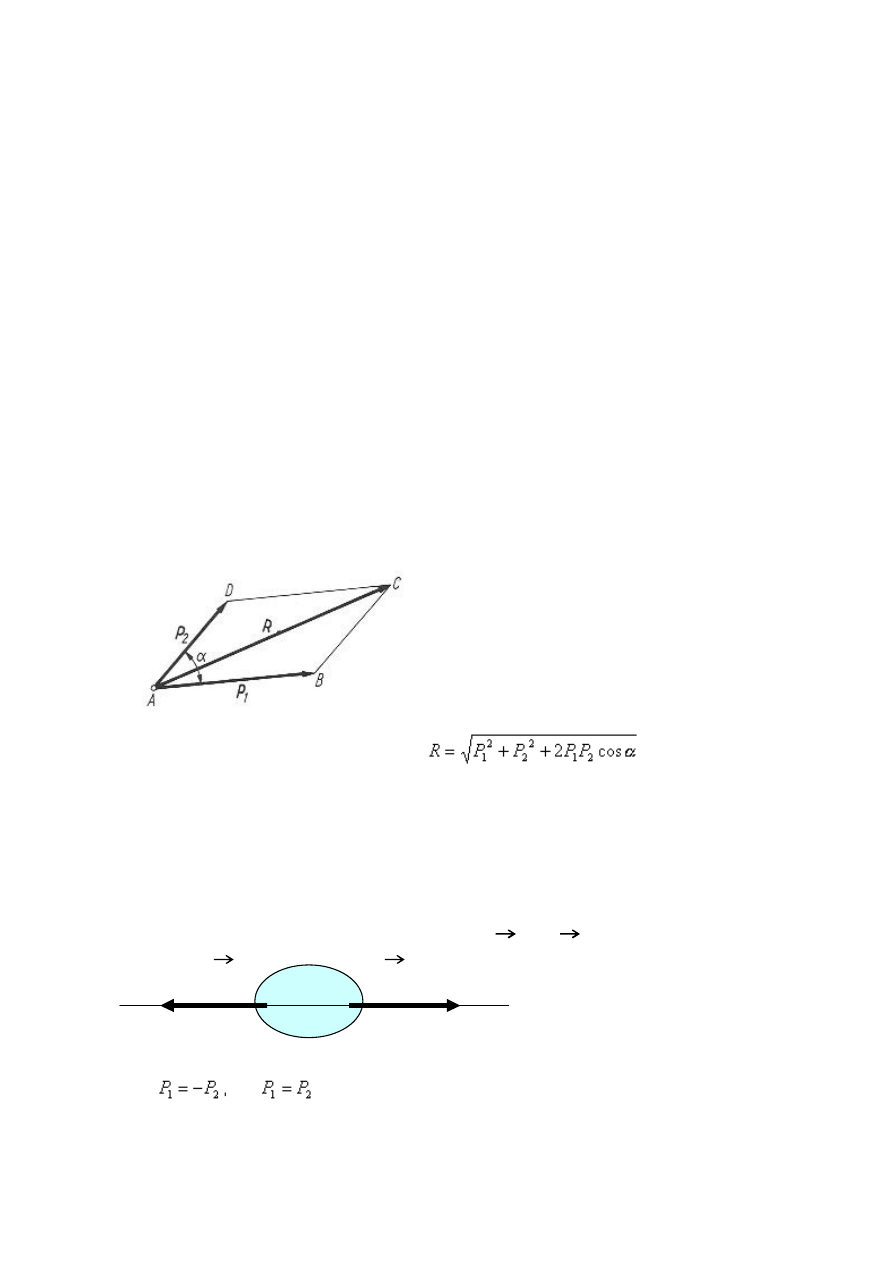
Zasada pierwsza (zasada równoległoboku). Działanie dwóch sił
P
1
i
P
2
można
zastąpić działaniem jednej siły
R
, działającej na ten sam punkt, będącej przekątną
równoległoboku
ABCD
zbudowanego na wektorach sił
P
1
i
P
2
.
Wypadkową
R
wyznaczamy ze wzoru :
Zasada druga.
Jeśli do ciała przyłożone są dwie siły, to równoważą
się one tylko wtedy , kiedy mają tę samą linię działania, te same
wartości liczbowe i przeciwne zwroty (rys.2)
Aby siły te równoważyły się, muszą być spełnione zależności
P
1
= -P
2
P
1
= P
2
P
1
P
2
l
Rys.2
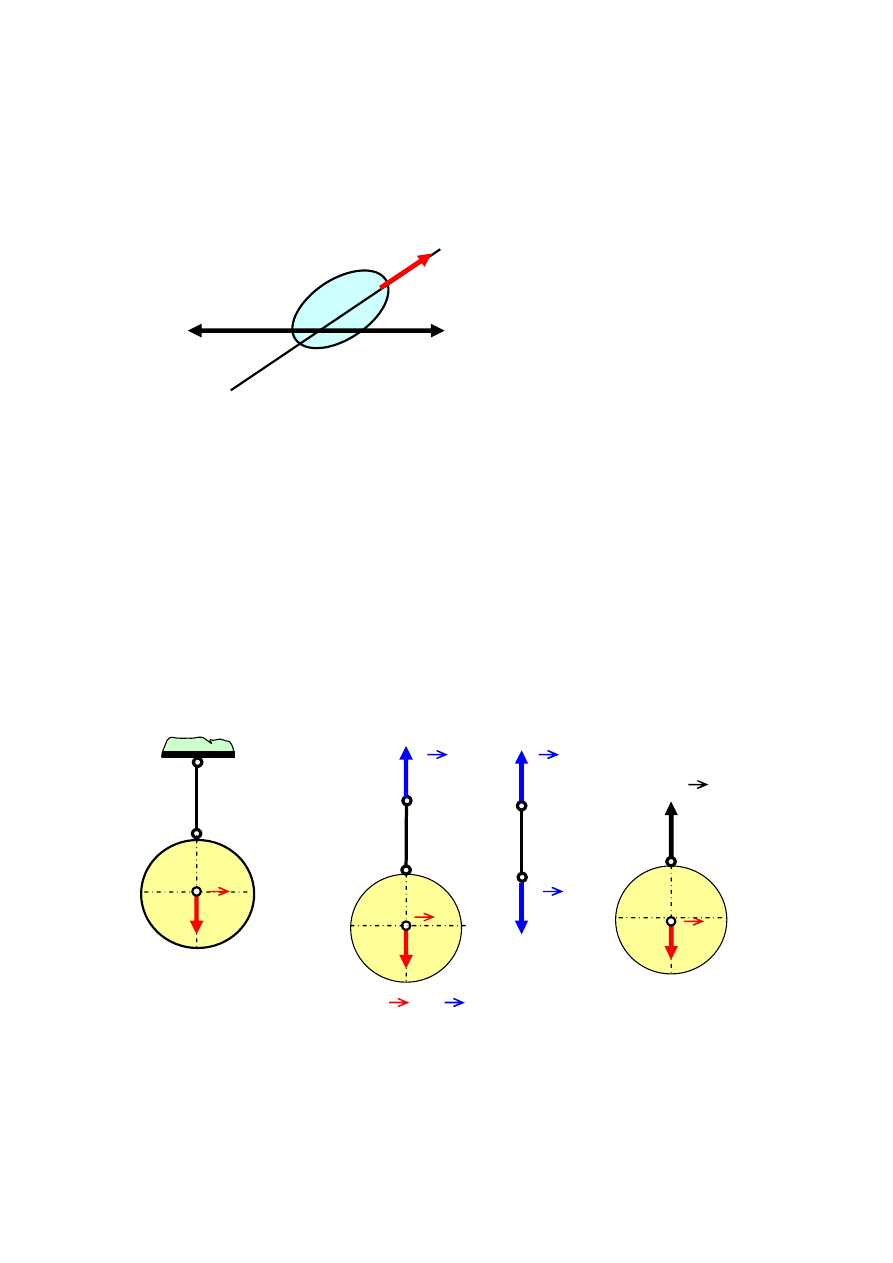
Zasada trzecia.
Skutek działania dowolnego układu sił,
przyłożonego do ciała nie zmieni się, jeśli do tego układu dodamy
lub odejmiemy dowolny układ równoważących się sił P
2
i –P
2
czyli
tzw.
układ zerowy
(rys.3)
P
1
B
-P
2
A P
2
Wynika stąd następujący wniosek: każdą siłę działającą na ciało sztywne można
przesunąć dowolnie wzdłuż jej linii działania.
Zasada czwarta
(
zasada zesztywnienia
).
Jeżeli ciało odkształcone znajduje się w równowadze pod
działaniem pewnego układu sił, to również pozostanie w
równowadze ciało doskonale sztywne (nieodkształcalne)
identyczne z poprzednim, pod działaniem tego samego układu sił.
Zasada piąta
(
zasada działania i przeciwdziałania
).
Każdemu działaniu towarzyszy równe co do wartości o
przeciwnym zwrocie i leżące na tej samej prostej przeciwdziałanie
B
R
R
B B R
A
A A
O A
G
0 -
R
G
G
Rys.4
G
= -
R
Zasada szósta
(
zasada oswobodzenia od więzów
)
Każde ciało można oswobodzić z więzów, zastępując ich działanie
reakcjami, a następnie rozpatrując jako ciało swobodne,
znajdujące się pod działaniem sił czynnych i biernych (reakcji
więzów)
A B
R
1
R
2
C
G
G
Rys.5
R
1
, R
2
– siły reakcji.
3. Omów stopnie swobody, więzy i reakcje (przykłady).
Każde ciało doskonale sztywne mogące poruszać się w przestrzeni nazywamy
ciałem swobodnym.
Stopniem swobody nazywa się możliwość wykonania ruchu ciała niezależnego od
innych ruchów.
Punkt materialny ma na płaszczyźnie dwa, a w przestrzeni trzy stopnie swobody.
Ciało doskonale sztywne ma na płaszczyźnie trzy, a w przestrzeni sześć stopni
swobody.
Trzy stopnie swobody ciała sztywnego na płaszczyźnie oznaczają możliwość dwóch
przesunięć niezależnych w kierunku osi
x
i
y
oraz możliwość obrotu ciała w
płaszczyźnie
Oxy
. Sześć stopni swobody ciała w przestrzeni oznaczają możliwość
trzech niezależnych przesunięć w kierunku osi
x
,
y
i
z
oraz możliwość niezależnego
obrotu ciała wokół tych osi.
Istnieją różne sposoby ograniczenia ruchu ciała – są to tzw. więzy.
Więzy i reakcje:
Więzami nazywamy warunki ograniczające ruch ciała w przestrzeni.
Wprowadzenie więzów jest równoznaczne z działaniem na ciało sił biernych, czyli
reakcji. Najczęstszymi sposobami podparcia ciał sztywnych są: przegub walcowy,
przegub kulisty, podpora przegubowa stała, zawieszenie na cięgnach wiotkich,
oparcie o gładką i chropowatą powierzchnię, utwierdzenie całkowite, podparcie na
prętach zamocowanych przegubowo na obu końcach.
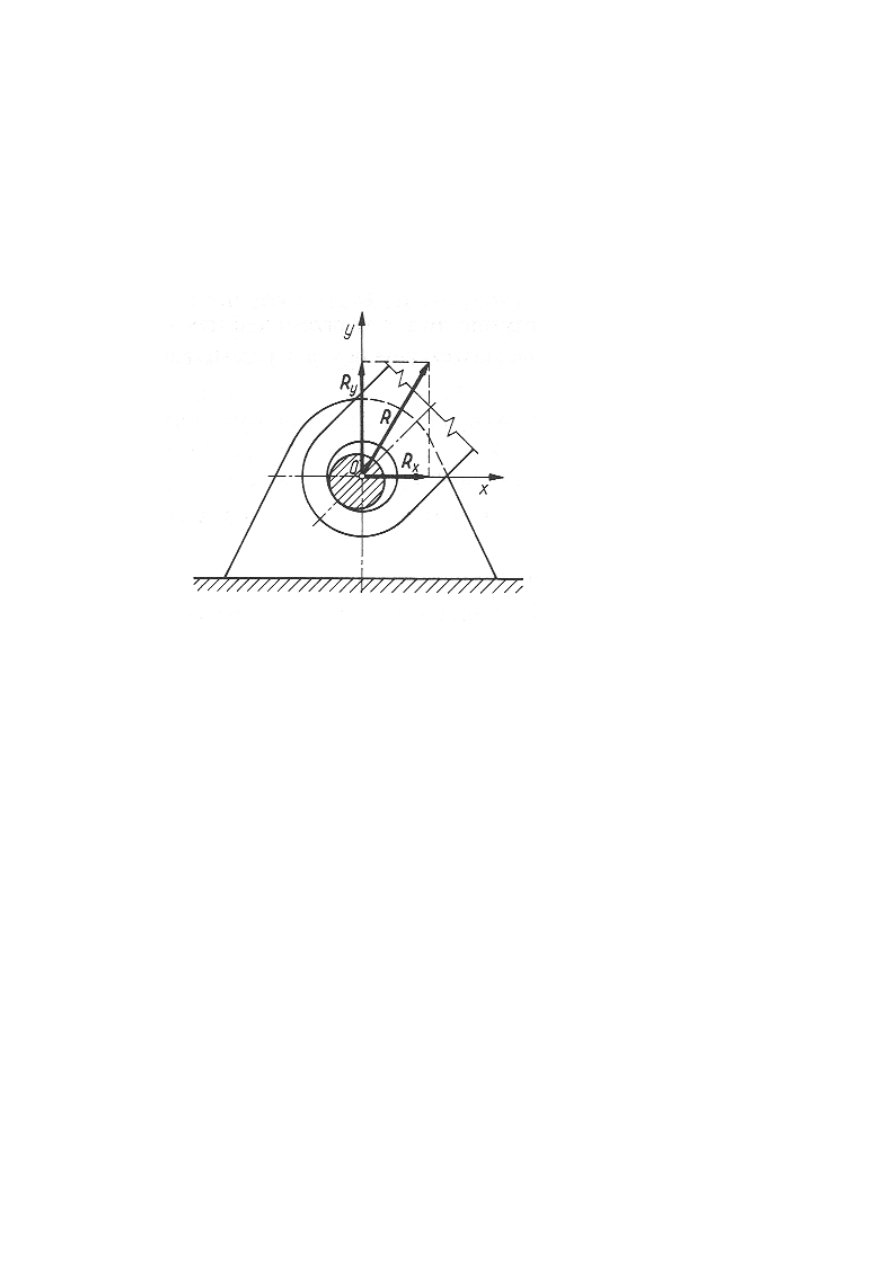
Przegub walcowy.
Ciało sztywne jest osadzone na walcowym sworzniu przechodzącym przez kołowy
otwór wykonany w tym ciele. Po pominięciu siły tarcia jako małej w porównaniu z siłą
normalną
R
do powierzchni styku linia działania tej reakcji będzie przechodziła przez
oś sworznia. Występujące dwie reakcje
R
x
i
R
y
stanowią dwie niewiadome i
umożliwiają wyznaczenie wartości reakcji
R
i jej kierunku.
Przegub kulisty.
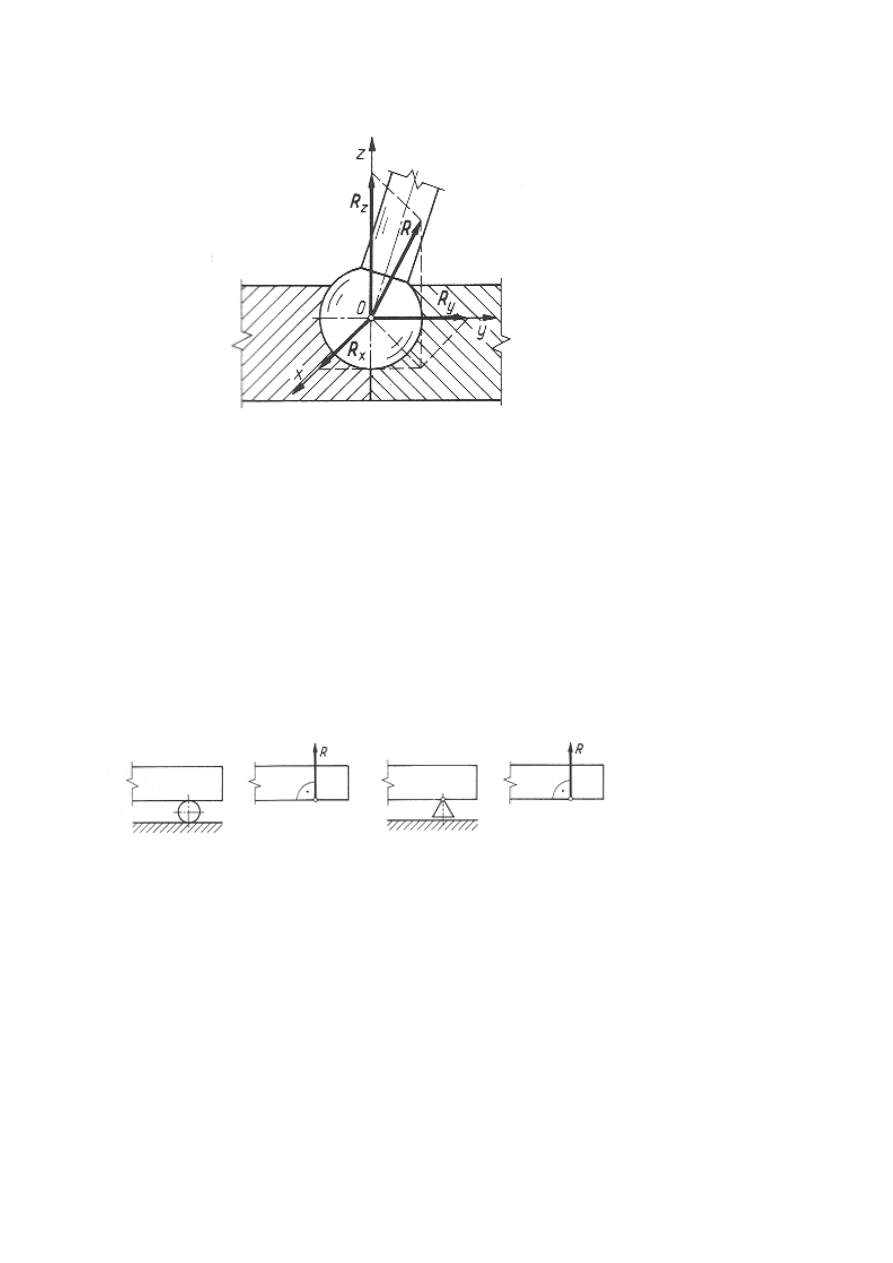
W celu unieruchomienia punktu podparcia w przestrzeni stosuje się przeguby kuliste,
które krępują swobodę przesunięć, ale umożliwiają obrót wokół dowolnej osi. Ich
zakończenie jest wykonane w kształcie kuli, która jest osadzona w łożysku kulistym.
W wyniku pominięcia sił tarcia w przegubie kulistym powstaje reakcja
R
o dowolnym
kierunku w przestrzeni, przechodząca przez środek kuli i mająca trzy niezależne
składowe
R
x
,
R
y
i
R
z
.
Podpora przegubowa przesuwna (rolkowa).
Ponieważ opór przy przesuwaniu takiej podpory w kierunku poziomym jest bardzo
mały, przyjmuje się, że linia działania reakcji jest prostopadła do płaszczyzny
poziomej (przesuwu).
Podpora przegubowa stała.
W przypadku zastosowania podpory przegubowej stałej koniec podparcia ciała
sztywnego może się obracać dookoła osi przegubu, ale nie może się przemieszczać
w dwóch kierunkach. Przy założeniu, że w przegubie nie ma tarcia, linia działania
reakcji
R
przechodzi przez punkt
A
. Powstają dwie niezależne od siebie składowe
reakcje
R
x
i
R
y
. Rozważając podporę przegubową stałą w przestrzeni należy
zauważyć, że koniec podparcia
B
nie może się przemieszczać w trzech kierunkach i
dlatego występują trzy niezależne składowe reakcje
R
x
,
R
y
i
R
z
.
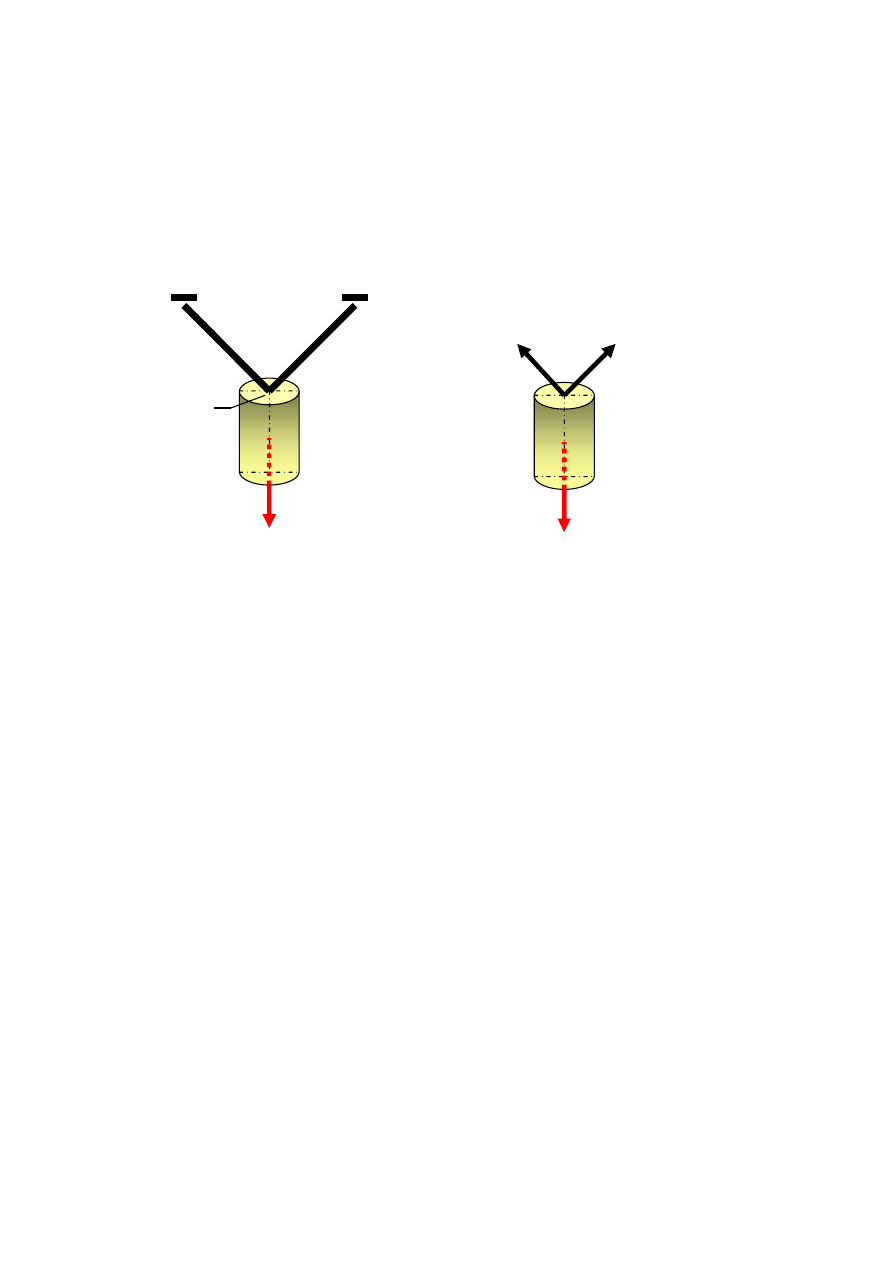
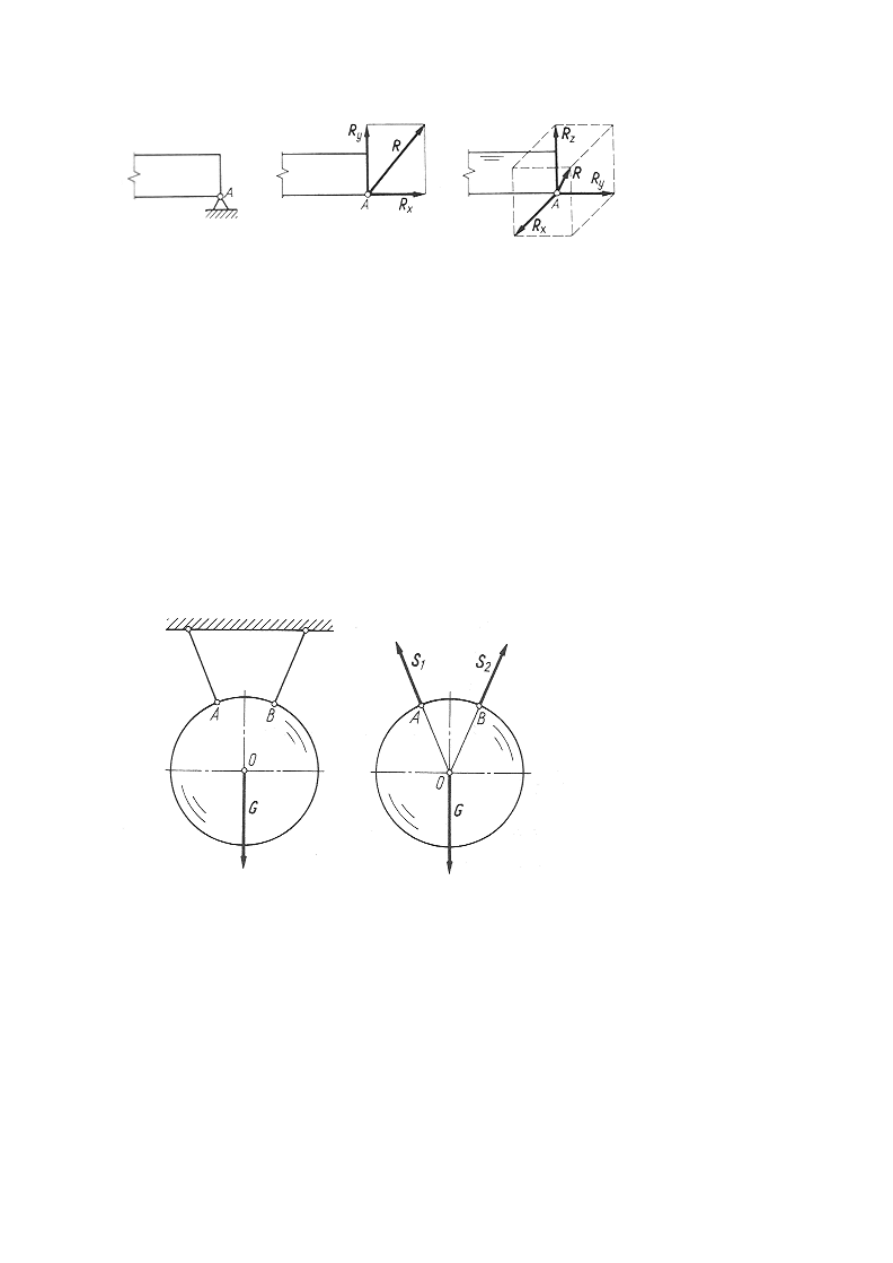
Zawieszenie na cięgnach wiotkich.
Podwieszenie ciała za pomocą wiotkich cięgien stwarza tzw. podpory kierunkowe
jednostronne, bo cięgna mogą być tylko rozciągane. Reakcje
S
1
i
S
2
działają na ciało
wzdłuż tych cięgien, zgodnie z rysunkiem.
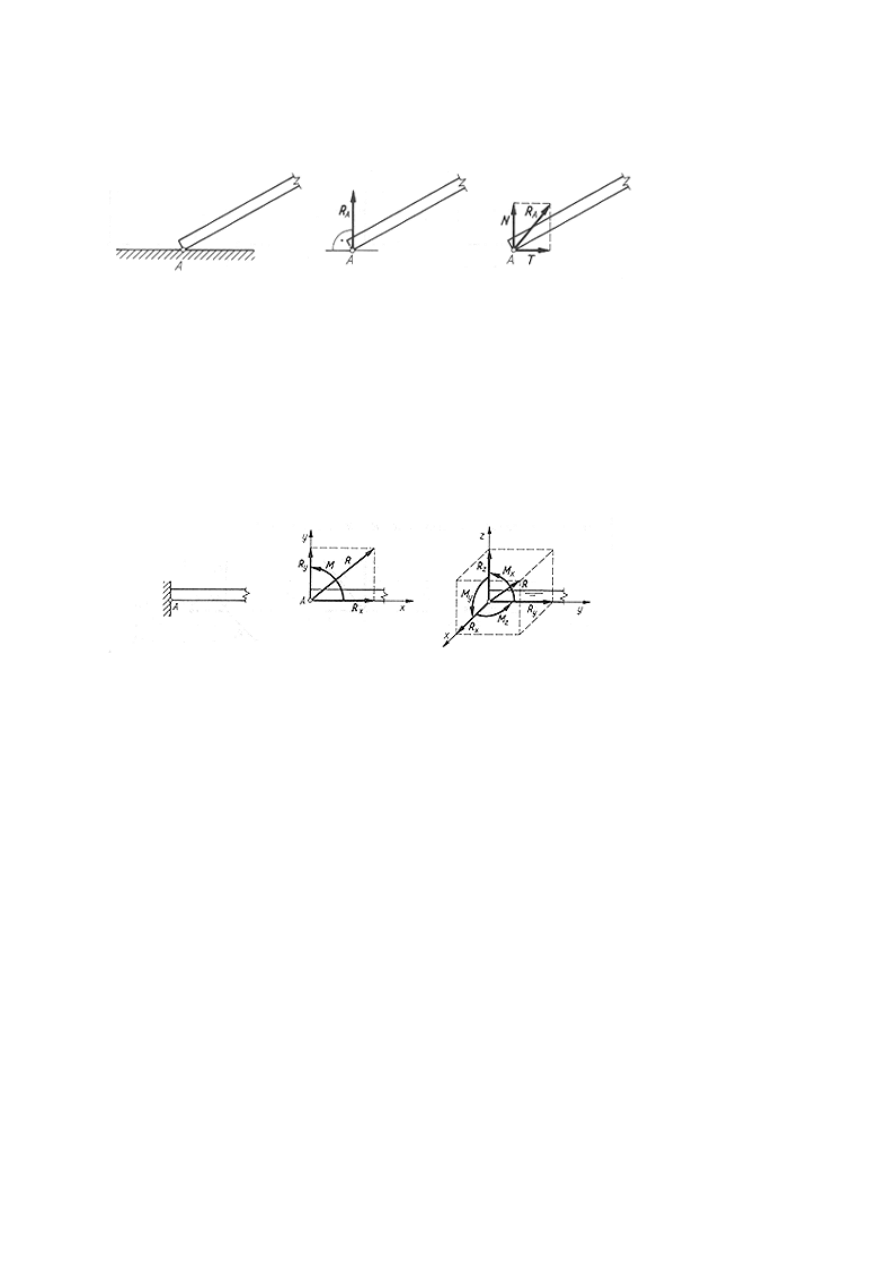
Oparcie o gładką i chropowatą powierzchnię.
W przypadku oparcia ciała o gładką powierzchnię (styk punktowy) występuje jedna
reakcja
R
A
, prostopadła do powierzchni styku. Jeżeli powierzchnia będzie
chropowata, to wystąpią dwie składowe reakcji
R
A
: normalna do powierzchni
N
i
styczna siła tarcia
T
.
Utwierdzenie całkowite.
Gdy chodzi o zupełne unieruchomienie ciała, wtedy stosuje się utwierdzenie
całkowite. Ciało sztywne na płaszczyźnie ma trzy stopnie swobody, a więc wystąpi
reakcja
R
o dwóch składowych
R
x
i
R
y
oraz moment utwierdzenia
M
. Rozważając
całkowite unieruchomienie ciała w przestrzeni, należy zastosować takie utwierdzenie,
które przedstawia sześć więzów. Wystąpi wtedy reakcja
R
o trzech składowych
R
x
,
R
y
i
R
z
oraz moment utwierdzenia
M
o trzech składowych
M
x
,
M
y
i
M
z
.
Ciało podparte na prętach zamocowanych przegubowo na obu końcach
(prętach przegubowych).
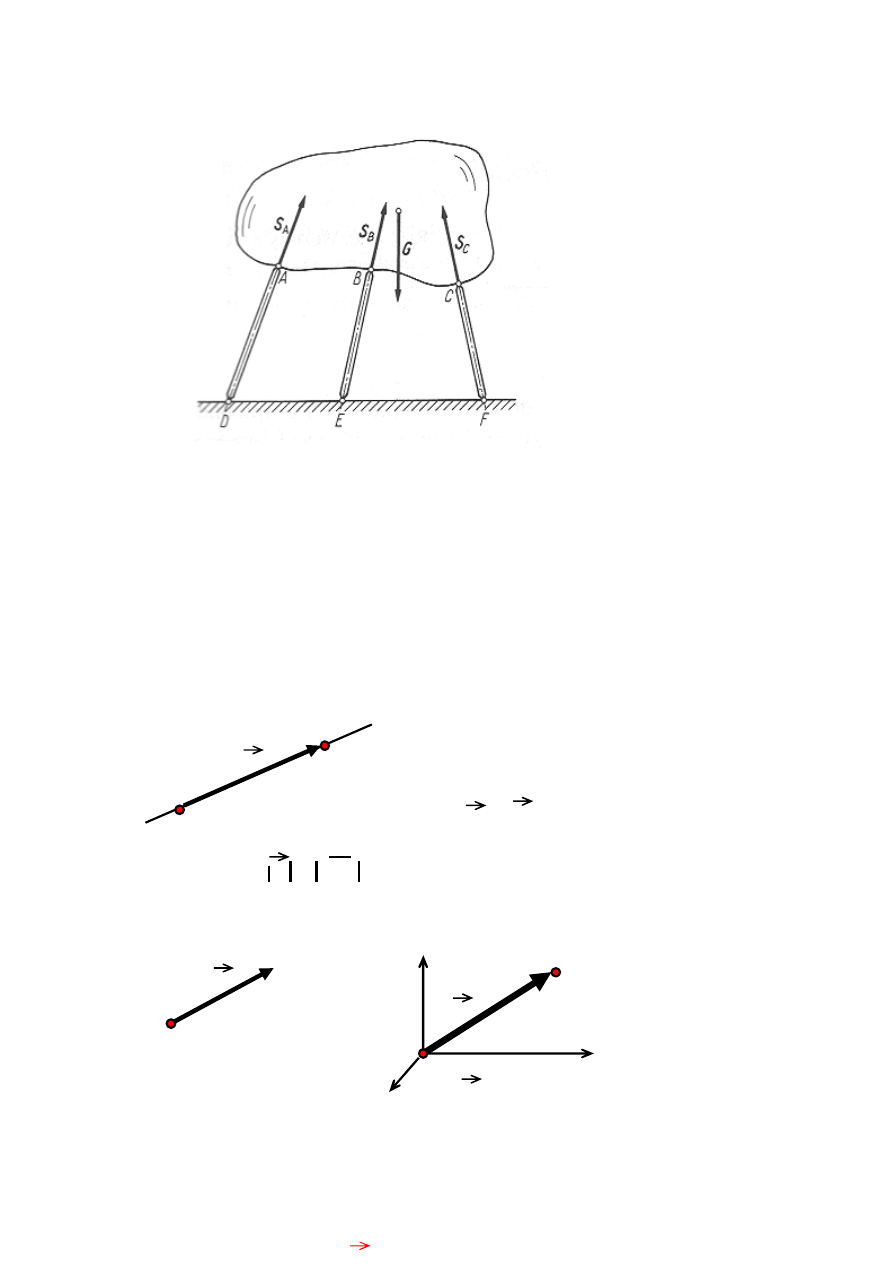
Ciało sztywne można także unieruchomić przez podparcie na prętach zakończonych
przegubami. Jeżeli pominiemy ciężary własne prętów i tarcie w przegubach, to
reakcje na ciało będą działać wzdłuż tych prętów
S
A
,
S
B
i
S
C
, zgodnie z rysunkiem.
4. Pojęcie skalara i wektora (rodzaje wektorów).
Pojęcie skalara i wektora
St.3
B l
a
A
Rys.6 a = AB
Moduł wektora a = AB = a
Rozróżniamy trzy rodzaje wektorów:
-
wektory związane z punktem
( wektory uczepione)
z
a M(x,y,z)
0 r
0 y
x
Rys.7 r – promień wektor
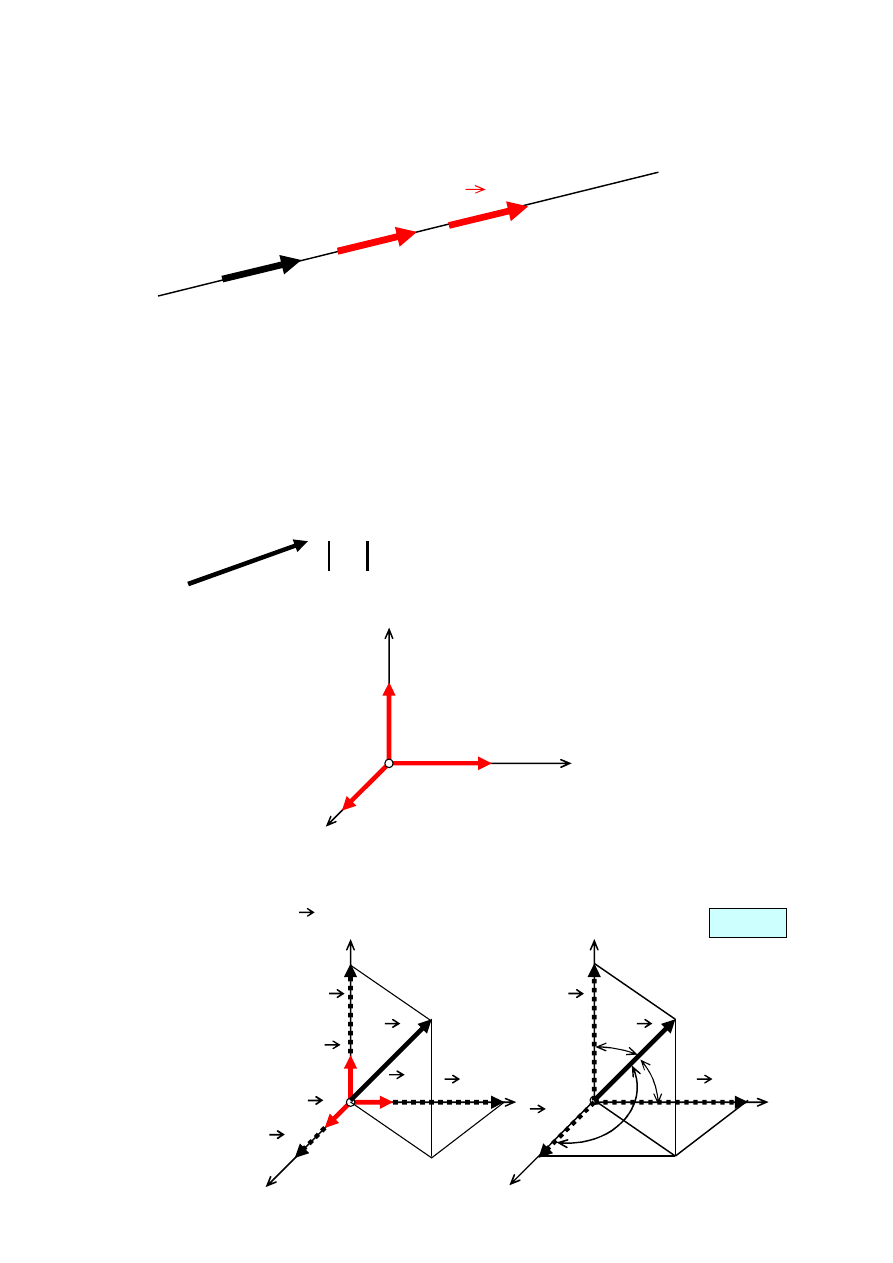
-
wektory związane z prostą
(wektory ślizgające się, wektory
posuwne)
l
a
a
a
Rys.8
Wektory swobodne –
Są określone przez moduł, zwrot oraz
kierunek równoległy do ich linii działania. Oznacza to, że
wektor swobodny można dowolnie przemieszczać,
równolegle do kierunku jego działania.
-
wersor
(wektor jednostkowy)
a
0
a
0
= a
0
= 1 Rys.9
- wersory związane z osiami układu prostokątnego
z
k
j
y
i
0
x Rys.10
5. Wektor w prawoskrętnym układzie kartezjańskim.
Składowe wektora a w układzie kartezjańskim St 4
z z
a
z
a
z
a
a
k
β
0
j
a
y
y a
y
y
i
a
x
a
x
x x
Rys.11
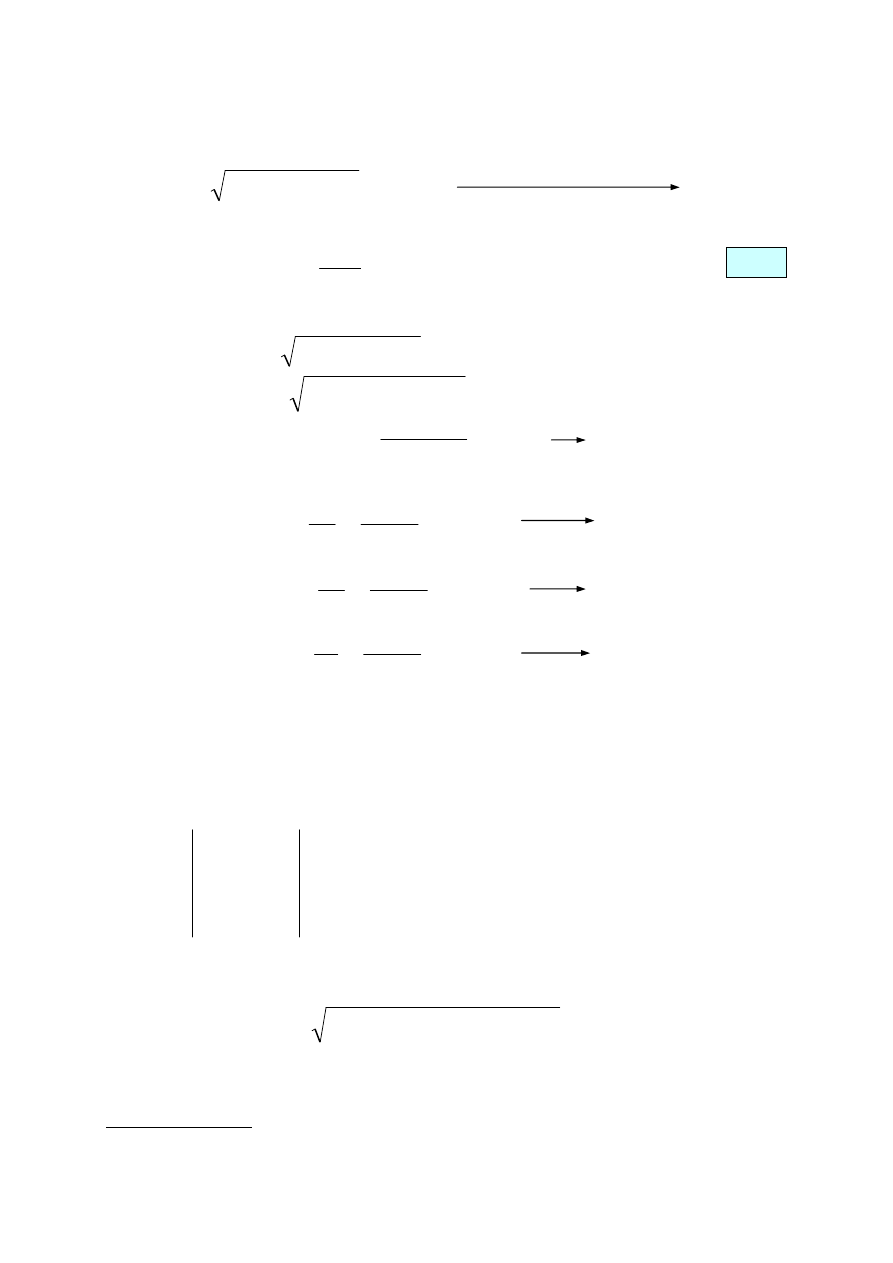
Wartość modułu wektora a
2
z
a
2
y
a
2
x
a
a
(2)
cosinusy kątów
a
a
cos
x
,
a
a
cos
y
,
a
a
cos
z
(3)
Układ kartezjański prawoskrętny – przy obrocie wersora i w kierunku j wersor k jest
skierowany zgodnie z regułą śruby prawoskrętnej.
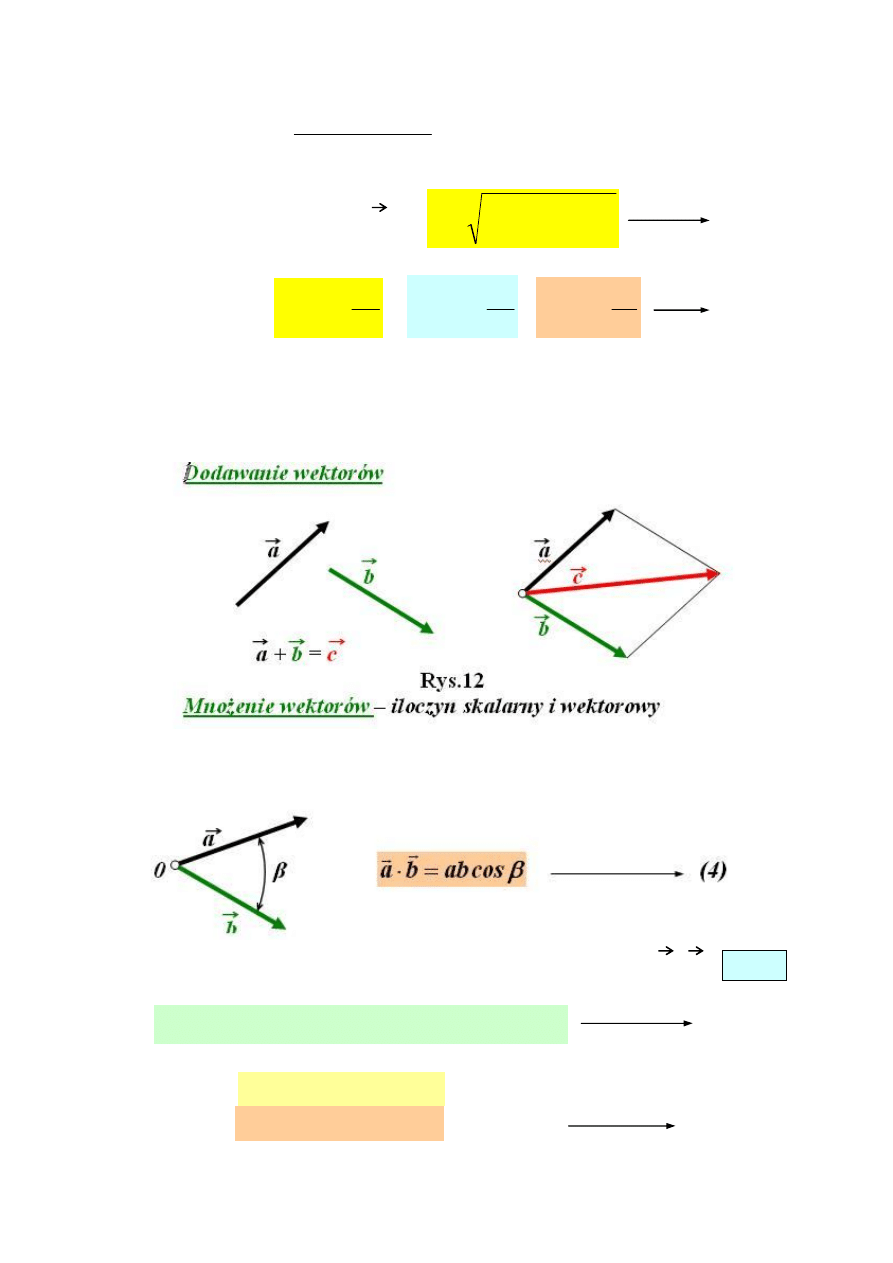
6. Dodawanie i mnożenie wektorów (zapis oraz ilustracja graficzna).
Iloczyn skalarny dwóch wektorów ab jest to skalar równy iloczynowi modułów wektorów
składowych przez cosinus kąta zawartego między nimi.
Analityczne wyrażenie iloczynu skalarnego wektorów a i b St5
k
b
j
b
i
b
k
a
j
a
i
a
b
a
z
y
x
z
y
x
(7)
ponieważ
1
k
k
j
j
i
i
patrz (4)
oraz
0
i
k
k
j
j
i
stąd (8)
z
z
y
y
x
x
b
a
b
a
b
a
b
a
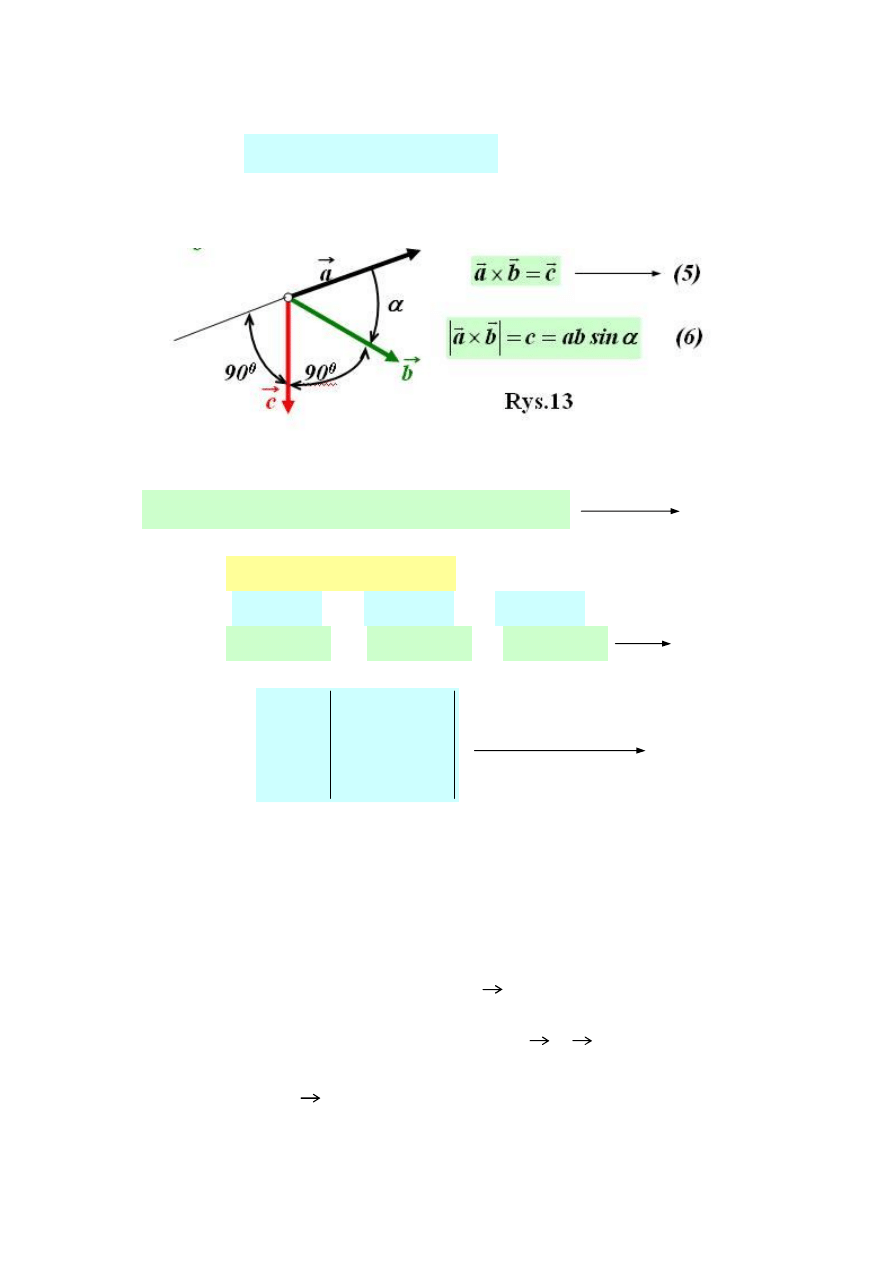
Iloczyn wektorowy dwóch wektorów axb jest to wektor, którego moduł równa się iloczynowi
modułów wektorów składowych.
Analityczne wyrażenie iloczynu wektorowego dwóch wektorów
k
b
j
b
i
b
k
a
j
a
i
a
b
a
z
y
x
z
y
x
(10)
ponieważ
0
k
k
j
j
i
i
patrz (6)
k
j
i
,
i
k
j
,
j
i
k
patrz (5)
k
i
j
,
i
j
k
,
j
k
i
(11)
stąd wyrażenie (10) jest rozwinięciem wyznacznika
z
y
x
z
y
x
b
b
b
a
a
a
k
j
i
b
a
Przykład 1
Dane są wektory
k
4
j
6
i
3
a
,
k
7
j
5
i
2
b
Obliczyć:
a) sumę wektorów
c
b
a
b) kąt między tymi wektorami
ab
c) wartości kątów
,β, jakie wektor c tworzy z osiami
współrzędnych 0xyz
d) wartość iloczynu skalarnego wektorów a i b
e) iloczyn wektorowy, wektorów
d
b
a
f) wartość wektora d
Rozwiązanie
ad a)
k
11
j
1
i
5
b
a
c
12
,
12
11
1
5
c
2
2
2
(a)
ad b) z (4)
ab
b
a
cos
ab
St.6
z (9)
4
7
4
)
5
(
6
2
3
b
a
z (2)
81
,
7
4
6
3
a
2
2
2
83
,
8
7
)
5
(
2
b
2
2
2
ostatecznie
058
,
0
83
,
8
81
,
7
4
ab
cos
67
,
86
ab
ad c) z (3)
412
,
0
12
,
12
5
c
c
cos
x
0
64
,
65
0825
,
0
12
,
12
1
c
c
cos
y
0
27
,
85
907
,
0
12
,
12
11
c
c
cos
z
0
82
,
24
ad d) iloczyn ten obliczono w punkcie b)
4
b
a
ad e) z (12)
6
2
5
3
k
2
4
7
3
j
4
5
7
6
i
7
5
2
4
6
3
k
j
i
b
a
k
27
j
13
i
62
d
b
a
ad f) z (2)
86
,
68
)
27
(
)
13
(
62
d
2
2
2
7. Analityczne wyznaczanie wypadkowej przestrzennego układu sił zbieżnych.
Zbieżne układy sił:
Płaski lub przestrzenny układ sił zbieżnych P
1
, P
2
, .. P
i
, ..P
n
przyłożonych do jednego punktu 0 można zastąpić jedną siłą
wypadkową P przyłożoną w tymże punkcie i równą sumie
geometrycznej tych sił (rys.14).
P
2
P
=
P
12
+ P
3
P
P
12
= P
1
+ P
2
P
3
P
1
0 Rys.14
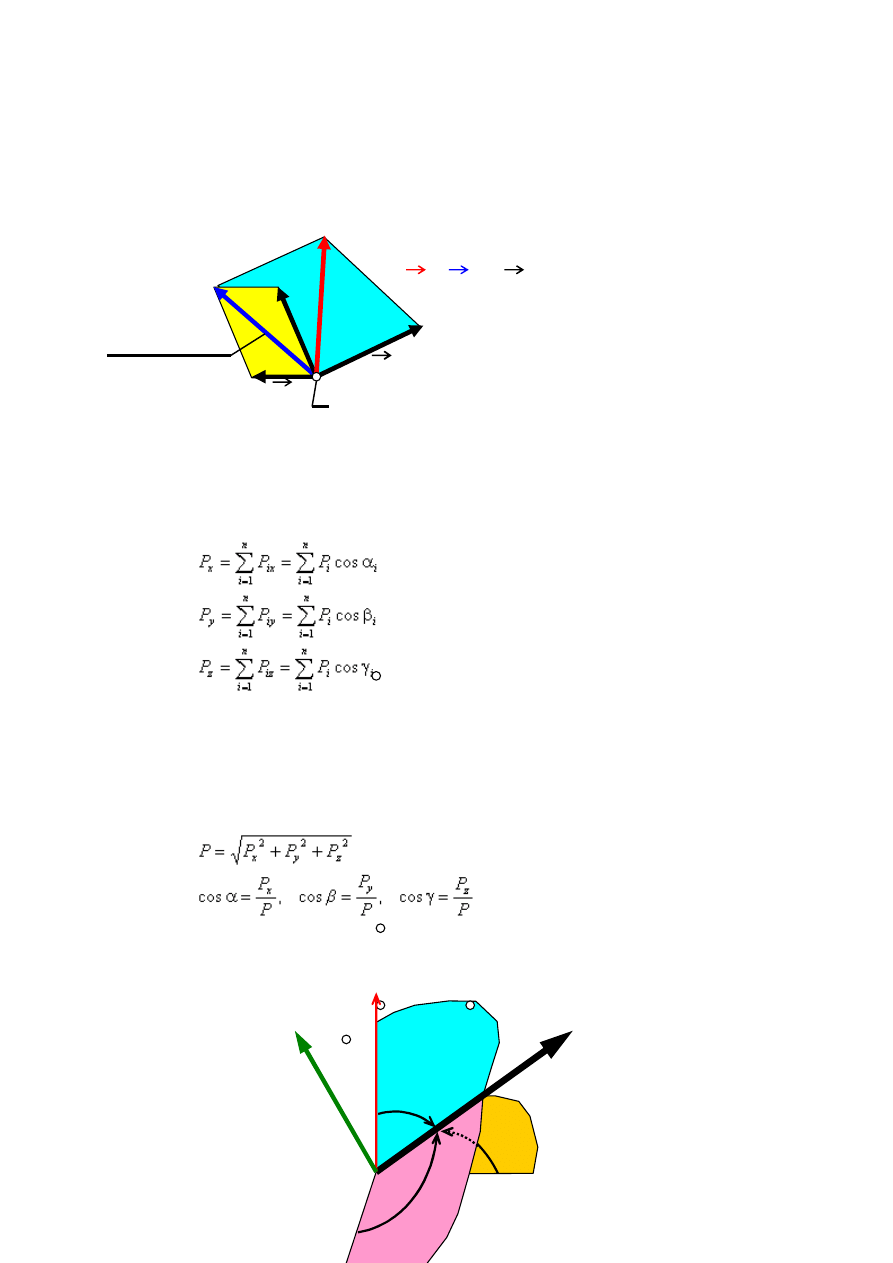
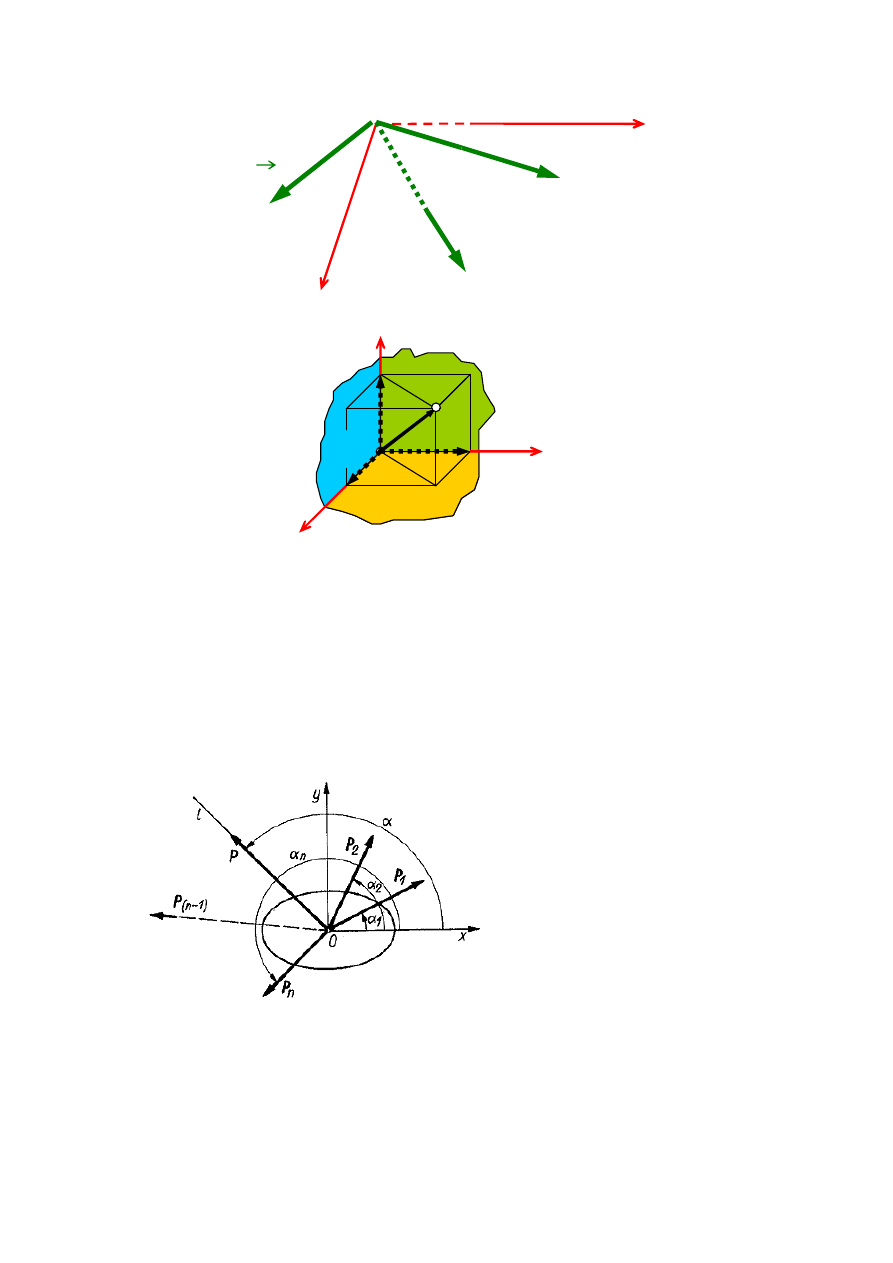
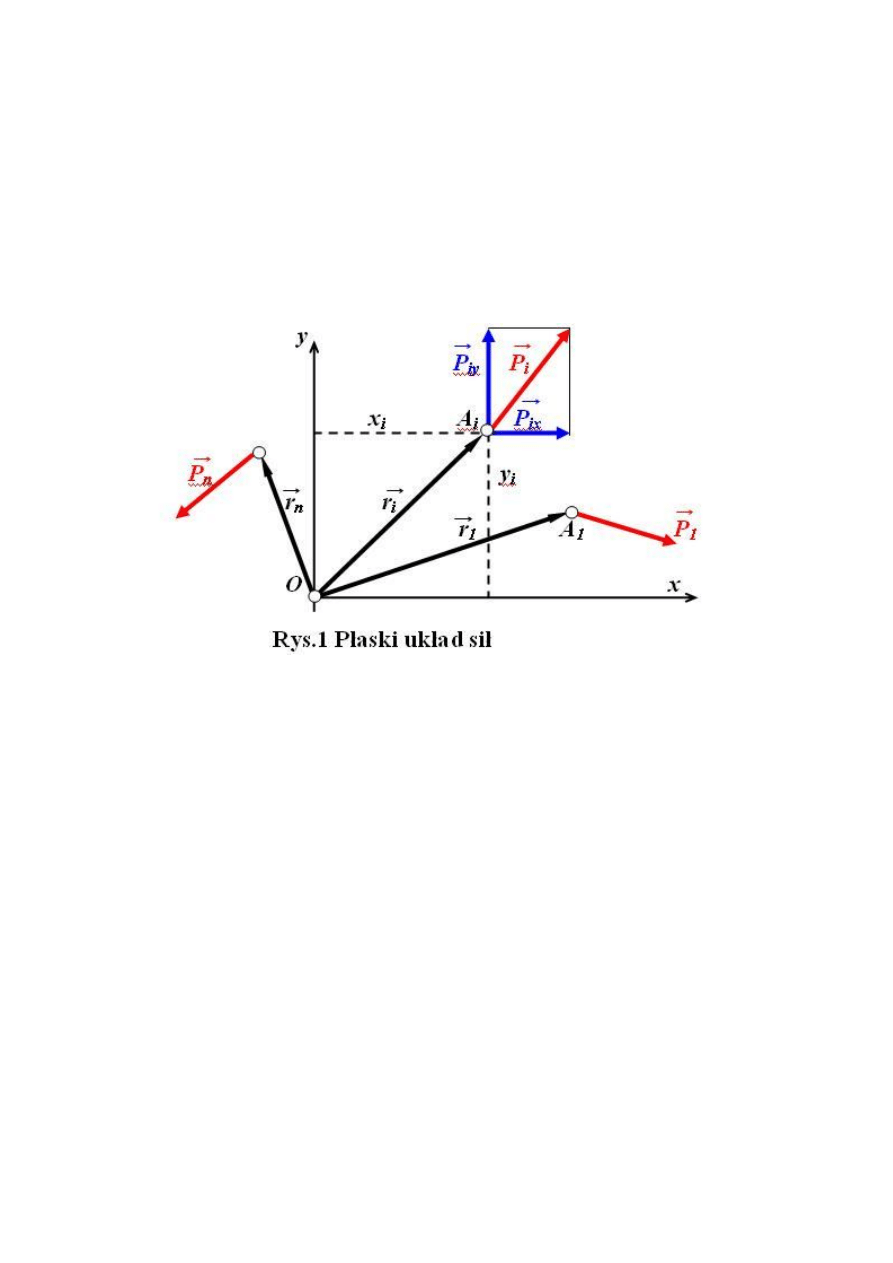
Analityczny sposób wyznaczenia wypadkowej przestrzennego układu sił zbieżnych
polega na wyznaczeniu składowych wypadkowej P
x
, P
y
i P
z
w prostokątnym układzie
współrzędnych
Oxyz
Wartość liczbową wypadkowej P oraz jej cosinusy kierunkowe wyznaczamy ze
wzorów
Analityczny sposób wyznaczania wypadkowej przestrzennego
układu sił zbieżnych (rys.15).
z
P
i
P
i+1
i
β
i
0
y
i
P
n
P
2
P
1
x
Rys.15
Składowe siły P
i
na osie prostokątnego układu 0xyz (rys.16)
z
P
iz
P
i
P
iy
y
P
ix
x
Rys.16
8. Równowaga płaskiego i przestrzennego układu sił zbieżnych.
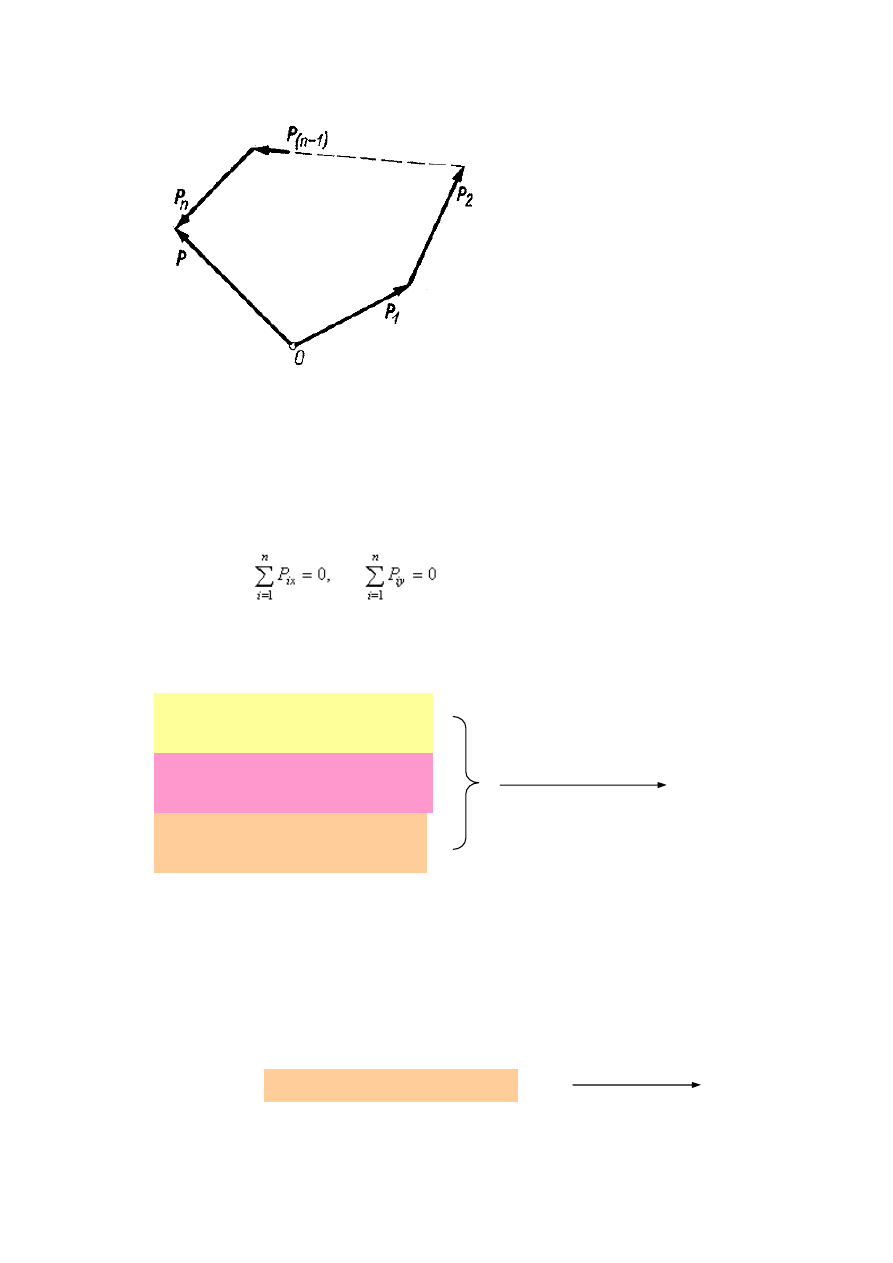
Geometryczny warunek równowagi (metoda geometryczna) płaskiego układu sił
zbieżnych brzmi: aby układ sił zbieżnych działających w jednej płaszczyźnie
znajdował się w równowadze, wielobok utworzony ze wszystkich sił tego układu
musi być zamknięty.
Analityczny warunek równowagi (metoda analityczna) płaskiego układu sił
zbieżnych (czynnych i reakcji więzów) brzmi następująco: aby siły zbieżne leżące
w jednej płaszczyźnie były w równowadze, sumy rzutów tych sił na osie układu
współrzędnych
muszą
być
równe
zeru
Równowaga przestrzennego układu sił zbieżnych
Warunki równowagi
(równania równowagi) w postaci analitycznej
n
i
1
i
n
i
1
i
i
i
ix
x
0
cos
P
P
P
n
i
1
i
n
i
1
i
i
i
iy
y
0
cos
P
P
P
(18)
n
i
1
i
n
i
1
i
i
i
iz
z
0
cos
P
P
P
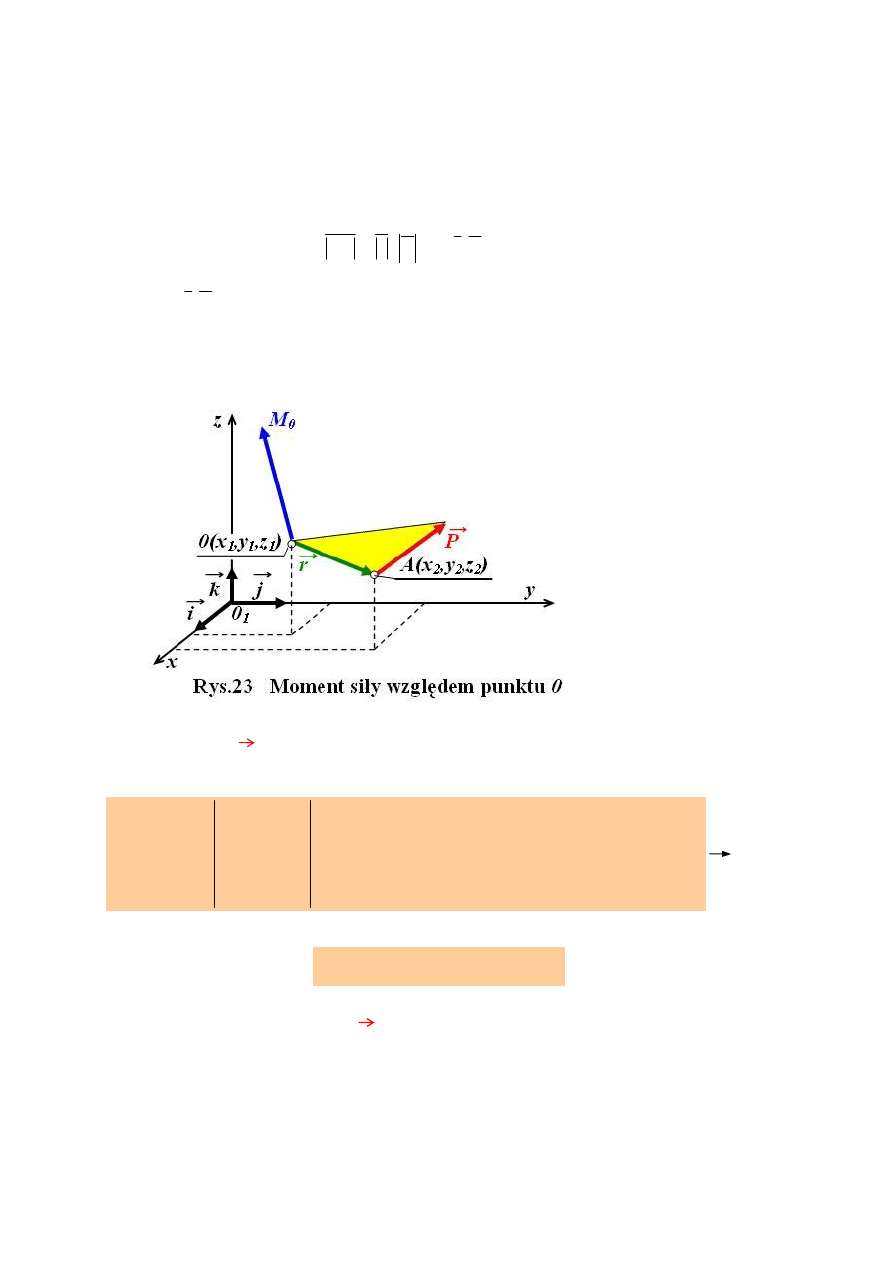
9. Moment siły względem punktu.
Moment siły względem punktu
Moment siły P względem punktu 0 nazywamy odłożony z punktu 0 wektor M0, równy
iloczynowi wektorowemu promienia wektora
r i wektora siły P.
P
r
M
0
Wartość bezwzględna wektora
M
0
F
2
Ph
sin
Pr
M
0
(21)
gdzie: h = r
sin, F pole trójkąta 0AB
Z przyjętego określenia momentu siły względem punktu wynikają następujące własności:
- wektor M
o
jest prostopadły do płaszczyzny określonej wektorami r i F o zwrocie
określonym regułą śruby prawoskrętnej,
- symbol momentu M
o
musi być opatrzony indeksem, wskazującym punkt, względem którego
moment jest obliczany, ponieważ moment ten zależy od wyboru tego punktu,
- wartość momentu, jako moduł wektora, jest określona wzorem.
)
,
sin(
F
r
F
r
M
o
(2.2)
gdzie: sin(
F
r,
) – kąt między wektorami r a F, sprowadzonymi do wspólnego punktu,
10. Moment siły względem dowolnego punktu w przestrzeni (twierdzenie
Varignona).
Moment siły względem dowolnego punktu 0 w przestrzeni:
Moment siły
P
względem punktu 0, w układzie
Kartezjańskim zgodnie z rachunkiem wektorowym można przedstawić jako iloczyn
wektorowy dwóch wektorów
(rys.23)
k
)
P
r
P
r
(
j
)
P
r
P
r
(
i
)
P
r
P
r
(
P
P
P
r
r
r
k
j
i
P
r
M
x
y
y
x
z
x
x
z
y
z
z
y
z
y
x
z
y
x
0
(22)
gdzie
1
2
x
x
x
r
1
2
y
y
y
r
1
2
z
z
z
r
Wzór (22) można zapisać
k
M
j
M
i
M
M
z
y
x
0
Twierdzenie Varignona
Moment siły wypadkowej
P
przestrzennego układu sił zbieżnych względem dowolnego
punktu
0
jest równy sumie geometrycznej momentów tych sił względem tego samego punktu
(24).
n
i
1
i
n
i
1
i
n
i
1
i
0
i
i
i
0
M
)
P
r
(
P
r
P
r
M
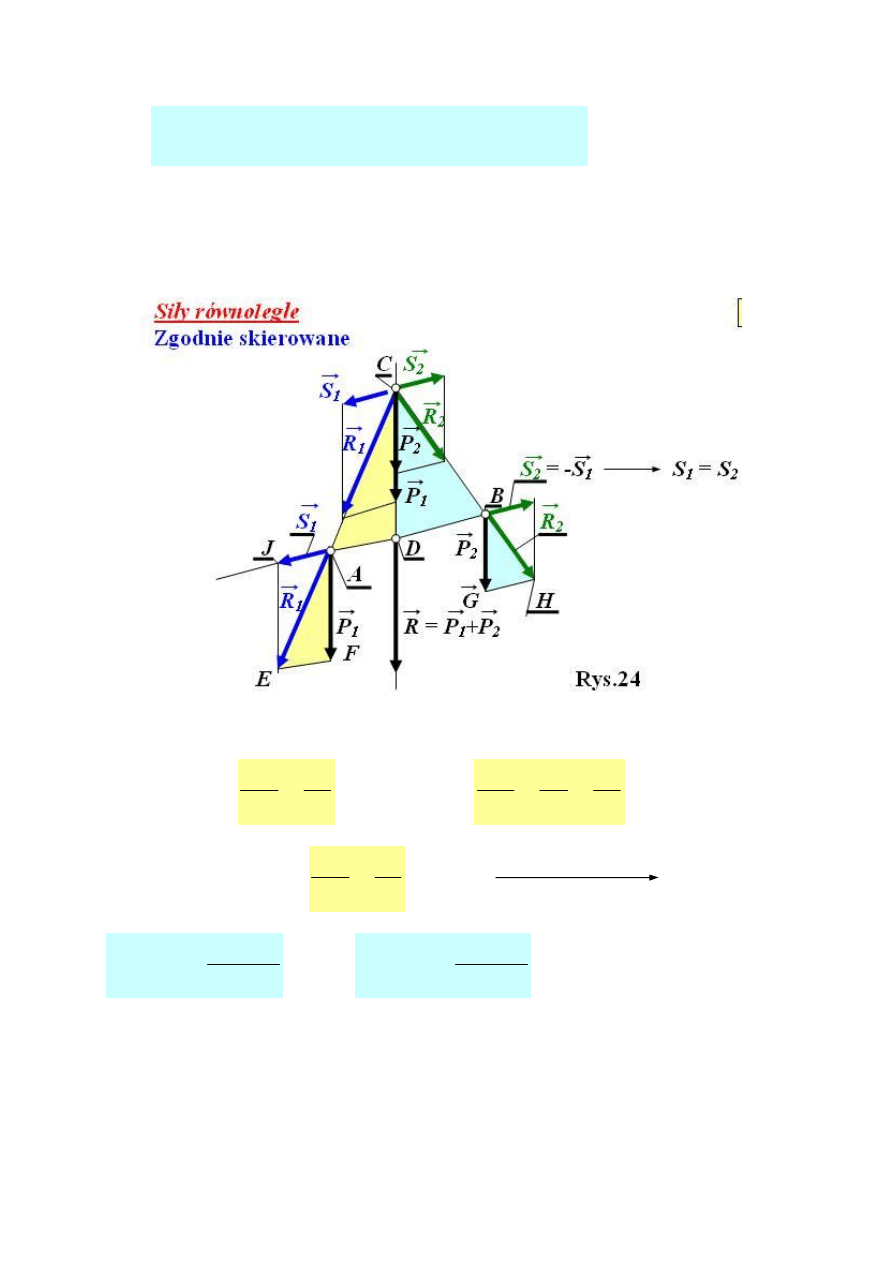
11. Wypadkowa dwóch sił równoległych zgodnie skierowanych.
Z podobieństwa trójkątów:
AEF i ACD
1
1
P
S
CD
AD
, BCD i BGH
2
1
2
2
P
S
P
S
CD
BD
(25)
Dzieląc stronami równania (25) otrzymujemy:
1
2
P
P
BD
AD
(26)
Dodając stronami równania (25) i przekształcając otrzymamy:
2
1
2
P
P
P
AB
AD
,
2
1
1
P
P
P
AB
BD
Wypadkowa dwóch sił równoległych zgodnie skierowanych działa równolegle do tych sił i
ma zwrot zgodny ze zwrotami tych sił. Jej wartość jest równa sumie wartości tych sił, a jej
linia działania dzieli wewnętrznie odległość między liniami działania sił w stosunku
proporcjonalnym do wartości tych sił.
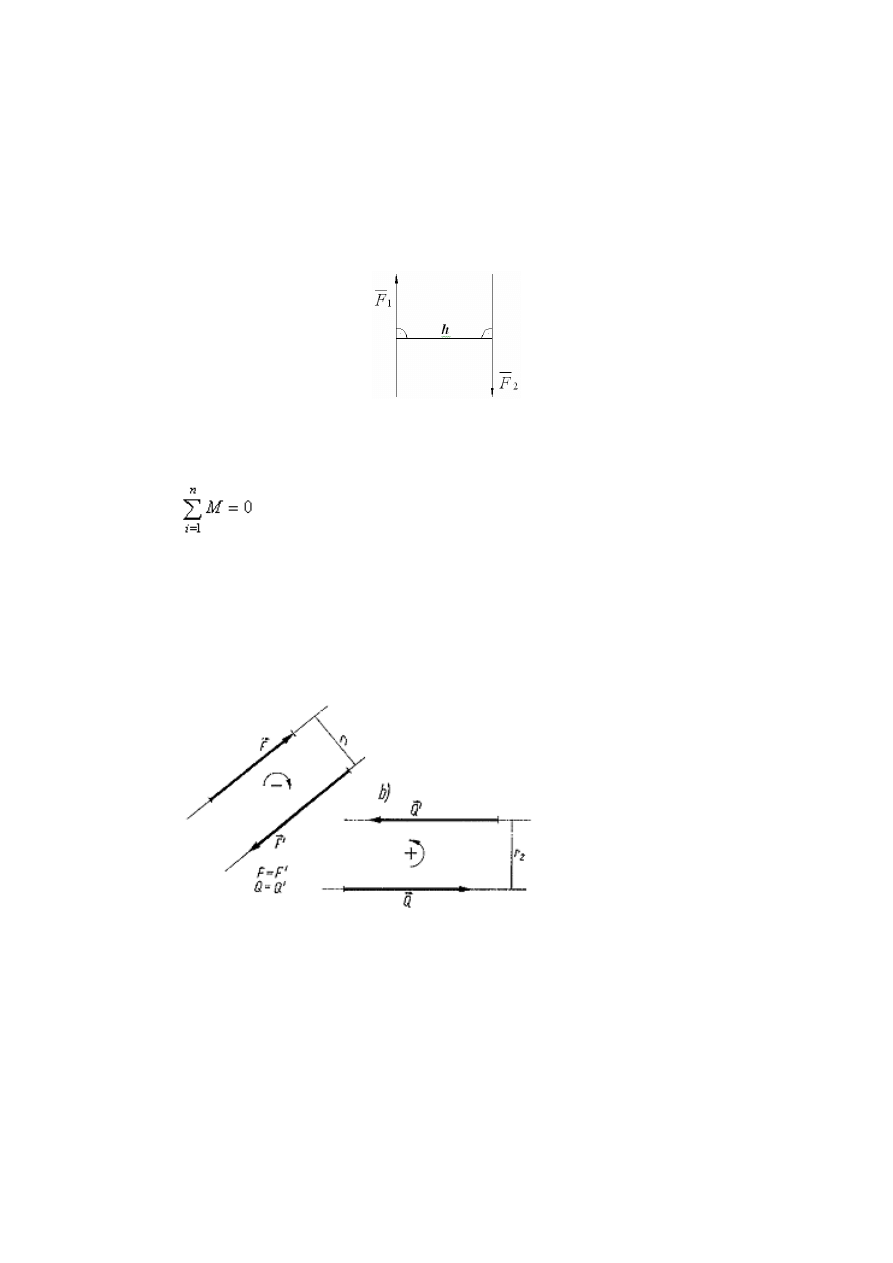
12. Para sił i moment pary sił.
Układ dwóch sił równoległych o równych wartościach, lecz różnych zwrotach nazywamy
parą sił.
Płaszczyzna, w której leżą obie siły, jest płaszczyzną pary sił. Ramieniem pary sił
nazywamy odległość między liniami działania obu sił.
Warunek równowagi par sił.
Dowolna liczba par sił działających w jednej płaszczyźnie lub w płaszczyznach równoległych
jest w równowadze wtedy, gdy algebraiczna suma ich momentów jest równa zeru.
Każdą parę sił możemy zastąpić wektorem momentu sił i odwrotnie - każdy wektor momentu
sił możemy zastąpić parą sił, jeśli tylko iloczyn wartości siły i odległości między siłami
wynosi M.
Moment pary sił uważamy za dodatni, jeżeli para dąży do obrócenia swego ramienia w stronę
przeciwną do ruchu wskazówek zegara. Jeżeli para dąży do obrócenia swego ramienia w
stronę zgodną z ruchem wskazówek zegara, to jej moment uważamy za ujemny.
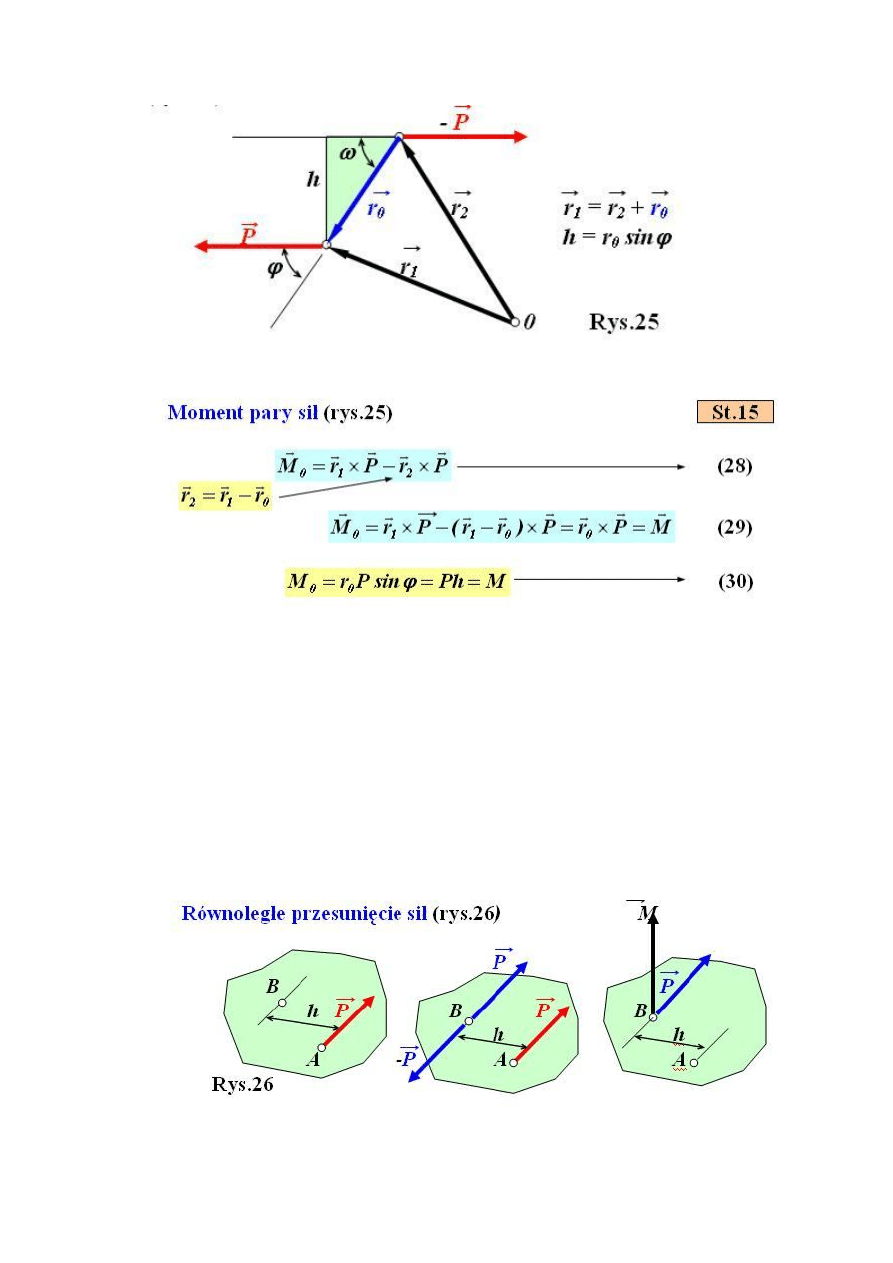
Moment pary sił:
Wektor momentu pary sił M
0
jest prostopadły do płaszczyzny działania obu sił a jego zwrot
określa się za pomocą zasady śruby prawoskrętnej.
Moment pary sił jest niezależny od wyboru punktu 0 i jest wielkością stałą. Jego wartość
równa się iloczynowi wartości jednej z sił pary i odległości między siłami (ramienia pary).
Jako wektor swobodny odkładamy go z dowolnego punktu płaszczyzny pary sił.
13. Równoległe przesunięcie sił.
<układ z rysunku a można zastąpić układem z rysunku c>.
Dla dowolnej siły P przyłożonej w punkcie A i punkcie B oddalonym o h wyznaczono
płaszczyznę π <rys. 26>. W punkcie B przykładamy równoważący się układ sił równoległych
do wektora P o wartościach równych P. Para sił –P i P tworzy moment równy M zaczepiony
w dowolnym punkcie płaszczyzny π, a więc np. w punkcie B. W efekcie siła P została
przesunięta do punktu B, w którym działają dwa wektory: siła P i moment pary sił M.
Oznacza to że układy z rysunku a i c są równoważne.
14. Redukcja płaskich układów sił.
Układ sił, którego siły leżą w jednej płaszczyźnie nazywamy układem płaskim.
Przesuwając równolegle wszystkie siły danego układu do jednego punktu 0 otrzymuje się
jedną siłę R równą ich sumie geometrycznej i jedną parę o momencie M
0
równym sumie
momentów tych par sił, ogólnie dla układu przestrzennego.
Siłę R nazywamy wektorem głównym układu sił, zaś moment Mo momentem głównym
względem środka redukcji O.
W przypadku gdy suma geometryczna układu sił P
1
, P
2
, ... Pn działających w jednej
płaszczyźnie na ciało sztywne jest różna od zera, układ można zastąpić jedną siłą wypadkową
równą wektorowi głównemu R.
Jeżeli suma geometryczna jest równa zeru, to taki układ sił może <ale nie musi> redukować
się do pary sił, której wektor jest prostopadły do płaszczyzny działania tych sił.
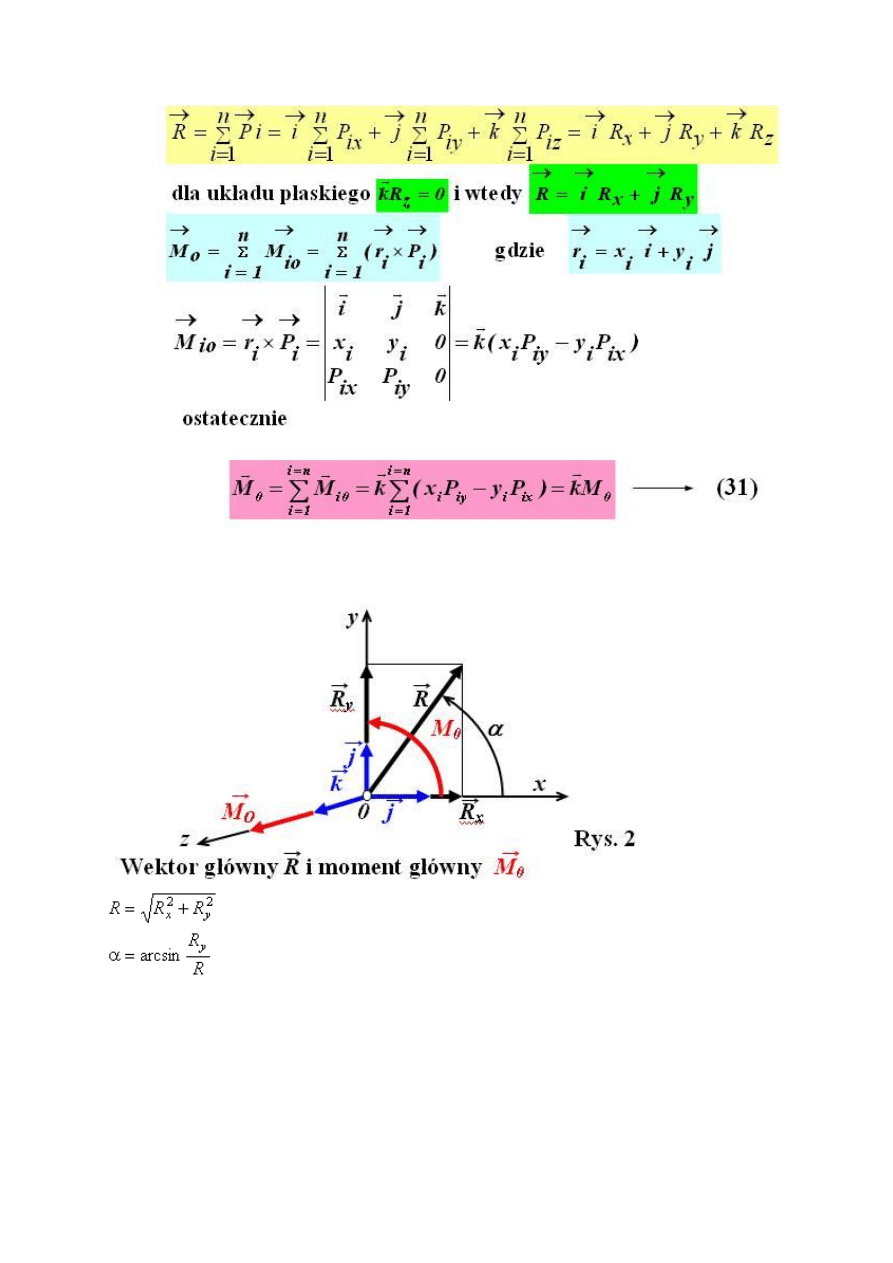
15. Wyjaśnić pojęcie wektora i momentu głównego.
Dowolny układ sił, działających na ciało sztywne, o liniach działania leżących w jednej
płaszczyźnie możemy zastąpić wektorem głównym R, przyłożonym do dowolnie wybranego
środka redukcji O oraz momentem głównym M
o
względem środka redukcji O. Wektor główny
R jest równy sumie geometrycznej wszystkich sił układu
Wartość wektora głównego oraz kąt a, jaki wektor ten tworzy z osią Ox, wyznaczamy ze
wzorów
Moment główny M
o
względem środka redukcji
O
jako początku układu współrzędnych
Oxy
jest równy sumie momentów danych sił układu względem punktu
O
Wektor momentu głównego M
o
jest wektorem o jednej składowej w kierunku wersora k, czyli
prostopadły do płaszczyzny
Oxy
i wektora głównego R.
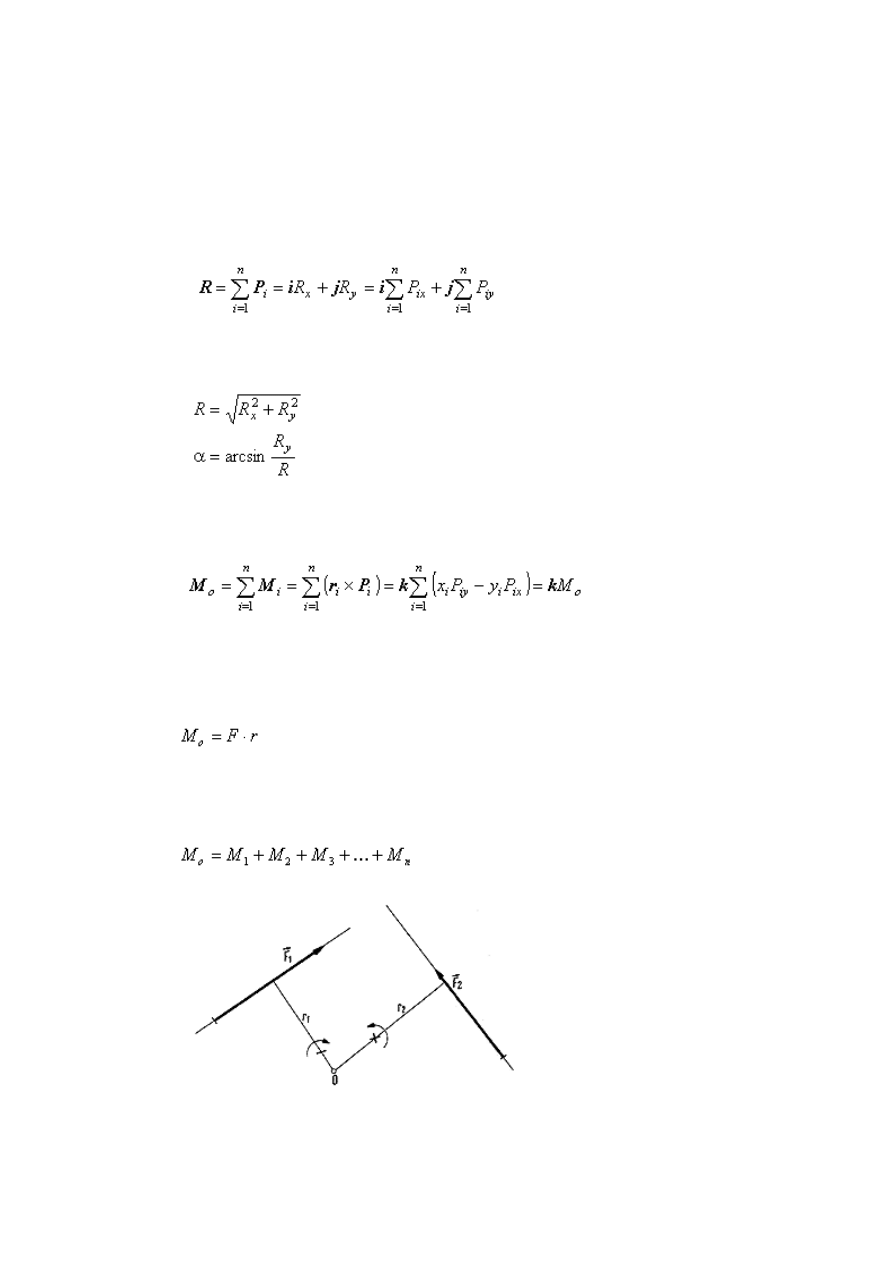
Wyrażenie
gdzie
F
jest siłą działającą wzdłuż prostej
l
,
a
r
jej ramieniem nazywamy momentem siły
względem dowolnego punktu
O
.
Wzór na moment główny w prostszej postaci przedstawia się następująco:
gdzie
M
1
,
M
2
,Ľ,
M
n
to poszczególne momenty sił.
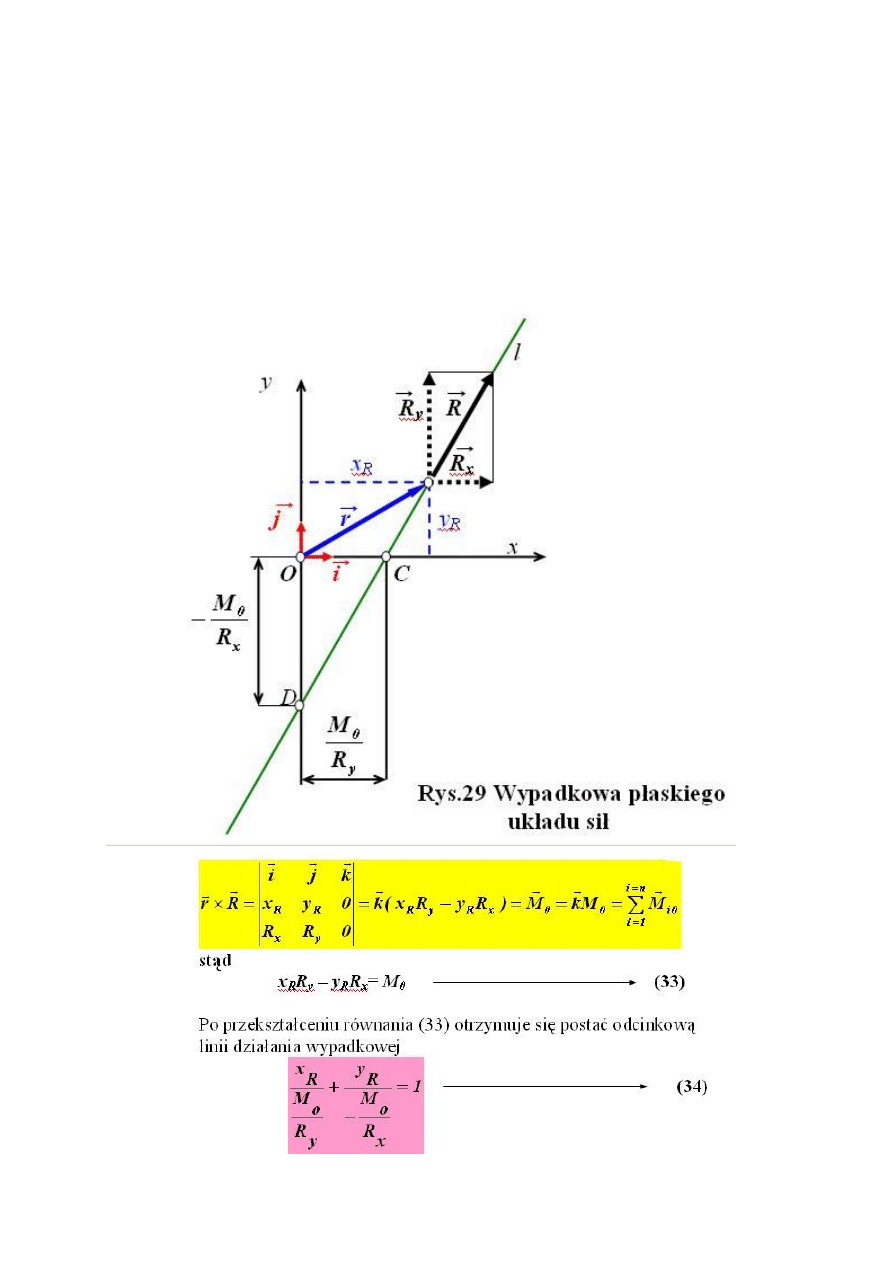
16. Redukcja płaskiego układu sił do jednej siły wypadkowej - linia działania
wypadkowej.
Równanie linii działania wypadkowej wyznacza się z warunku, że moment siły wypadkowej
względem początku układu równa się momentowi głównemu M0 równemu sumie momentów
danych sił względem początku układu współrzędnych.
0
M
R
r

gdzie wyrażenia w mianowniku M0/ry, -M0/Rx odpowiadają odcinkom OC i OD jakie
linia działania wypadkowej odcina na osiach x i y.
17. Omówić cztery przypadki redukcji płaskiego układu sił.
W układzie mogą zachodzić cztery przypadki:
1) R ≠ 0 i M
0
≠ 0 układ sprowadza się do wypadkowej o linii działania według wzoru (34)
2) R ≠ 0 i M
0
= 0 układ sprowadza się do wypadkowej przechodzącej przez środek
redukcji
0
3) R = 0 i M
0
≠ 0 układ sprowadza się do pary sił leżących w płaszczyźnie Oxy
4) R = 0 i M
0
= 0 układ jest w równowadze
18. Równowaga dowolnego płaskiego układu sił.- trzy sposoby zapisu.
Warunki równowagi dowolnego płaskiego układu sił otrzymuje się przyrównując do zera
wektor i moment główny względem środka redukcji. R=0 i M0 = 0 co prowadzi do 3
równań algebraicznych:
n
i
ix
F
1
0
0
1
n
i
iy
F
n
i
io
M
1
0
Płaski dowolny układ sił znajduje się w równowadze jeżeli sumy rzutów wszystkich sił na
osie układów są równe zeru i moment wszystkich sił względem dowolnego punktu
płaszczyzny działania tych sił jest równy zeru.
Istnieją inne sposoby zapisania równań równowagi płaskiego układu sił:
- Jeżeli moment układu sił względem dwóch punktów jest równy zeru oraz rzut sił na oś
nieprostopadłą do odcinka łączącego te punkty jest równy zeru, to płaski układ sił jest w
równowadze.
0
1
n
i
ix
F
n
i
iA
M
1
0
n
i
iB
M
1
0
- Jeżeli moment układu sił względem trzech punktów nie leżących na jednej prostej jest
równy zeru , to płaski układ sił jest w równowadze.
n
i
iA
M
1
0
n
i
iB
M
1
0
n
i
iC
M
1
0
19. Równowaga dowolnego przestrzennego układu sił.
Warunki równowagi dowolnego przestrzennego układu n sił otrzymuje się przyrównując
do zera wektor i moment główny względem środka redukcji R=0 i M0 = 0 co prowadzi do
6 równań algebraicznych:
n
i
ix
F
1
0
n
i
iy
F
1
0
n
i
iz
F
1
0
n
i
ix
M
1
0
n
i
iy
M
1
0
n
i
iz
M
1
0
Dowolny przestrzenny układ sił znajduje się w równowadze jeśli sumy rzutów
wszystkich sił na trzy osie układu są równe zeru i suma momentów wszystkich sił
względem trzech osi układu jest równa zeru.
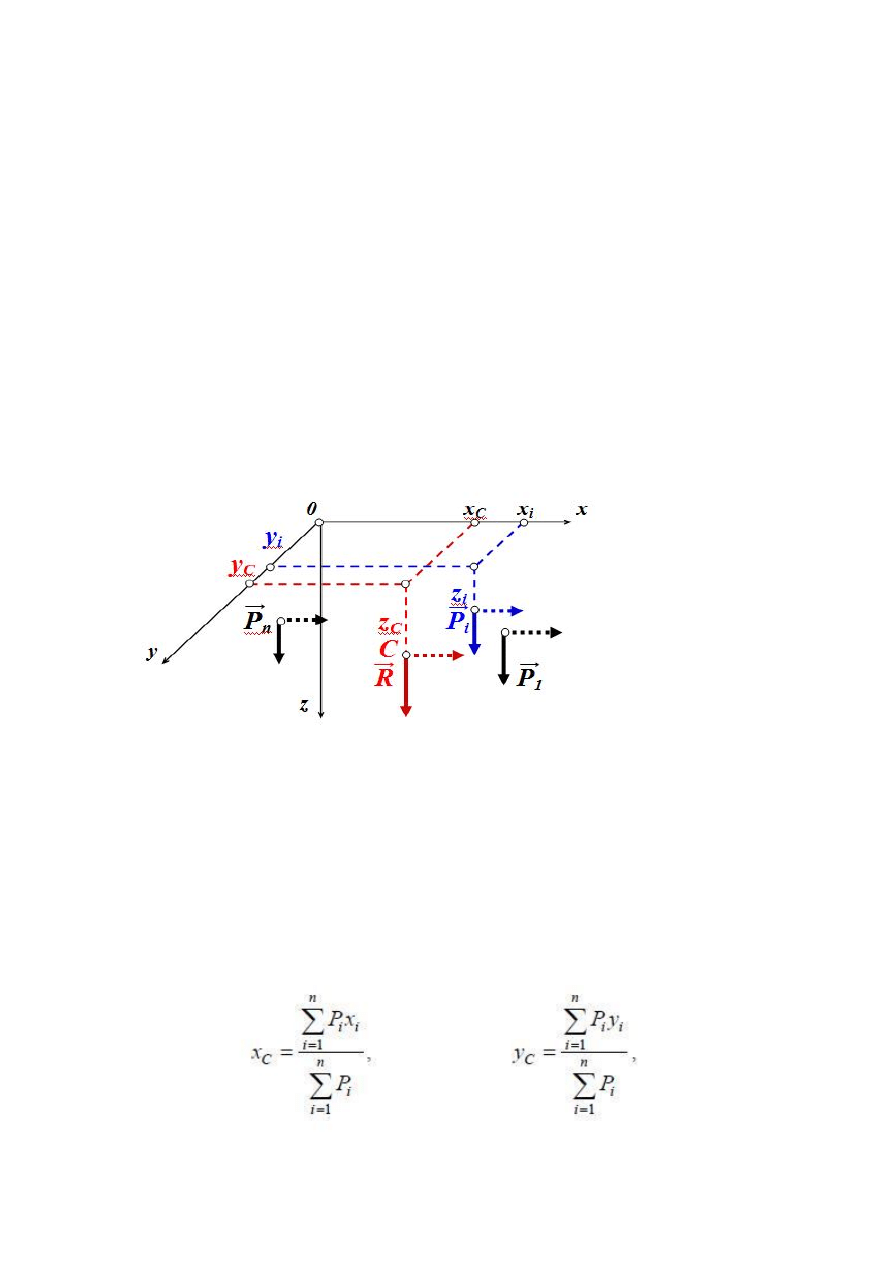
20. Przestrzenny układ sił równoległych. Środek sił równoległych.
Punkt C mający tę własność, że przechodzi przez niego stale wypadkowa W=R
danego układu sił równoległych P niezależnie od kierunku tych sił (przy
niezmiennych punktach przyłożenia i wartości sił) nazywa się środkiem sił
równoległych.
Moment siły wypadkowej W=R względem dowolnego punktu równa się sumie
momentów układu sił względem tego samego punktu (twierdzenie Varignona).
Współrzędne punktu C obliczamy opierając się na twierdzeniu Varignona. Wartość
momentu względem osi y wypadkowej R przyłożonej do punktu C równa jest
My = -R
Xc
przy czym R = ∑Pi
Moment siły Pi przyłożonej w punkcie przyłożenia wynosi
Miy = -Pixi
Z twierdzenia o momencie wypadkowej mamy R
Xc
= ∑Pixi a stąd
Obróćmy teraz wszystkie siły tak, aby stały się równoległe do osi x nie zmieniając przy
tym ich punktów przyłożenia. Porównując sumę momentów wszystkich sił względem osi
y do odpowiedniego momentu wypadkowej przyłożonej do punktu C otrzymujemy trzecią
współrzędną środka sił równoległych:
Równania równowagi dla układu sił równoległych do osi z mają postać
∑P
iz
= 0
∑M
ix
= 0
∑M
iy
= 0
Równania równowagi dla układu sił równoległych do osi y mają postać:
∑P
iy
= 0
∑M
ix
= 0
∑M
iz
= 0
Równania równowagi dla układu sił równoległych do osi x mają postać:
∑P
ix
= 0
∑M
iy
= 0
∑M
iz
= 0
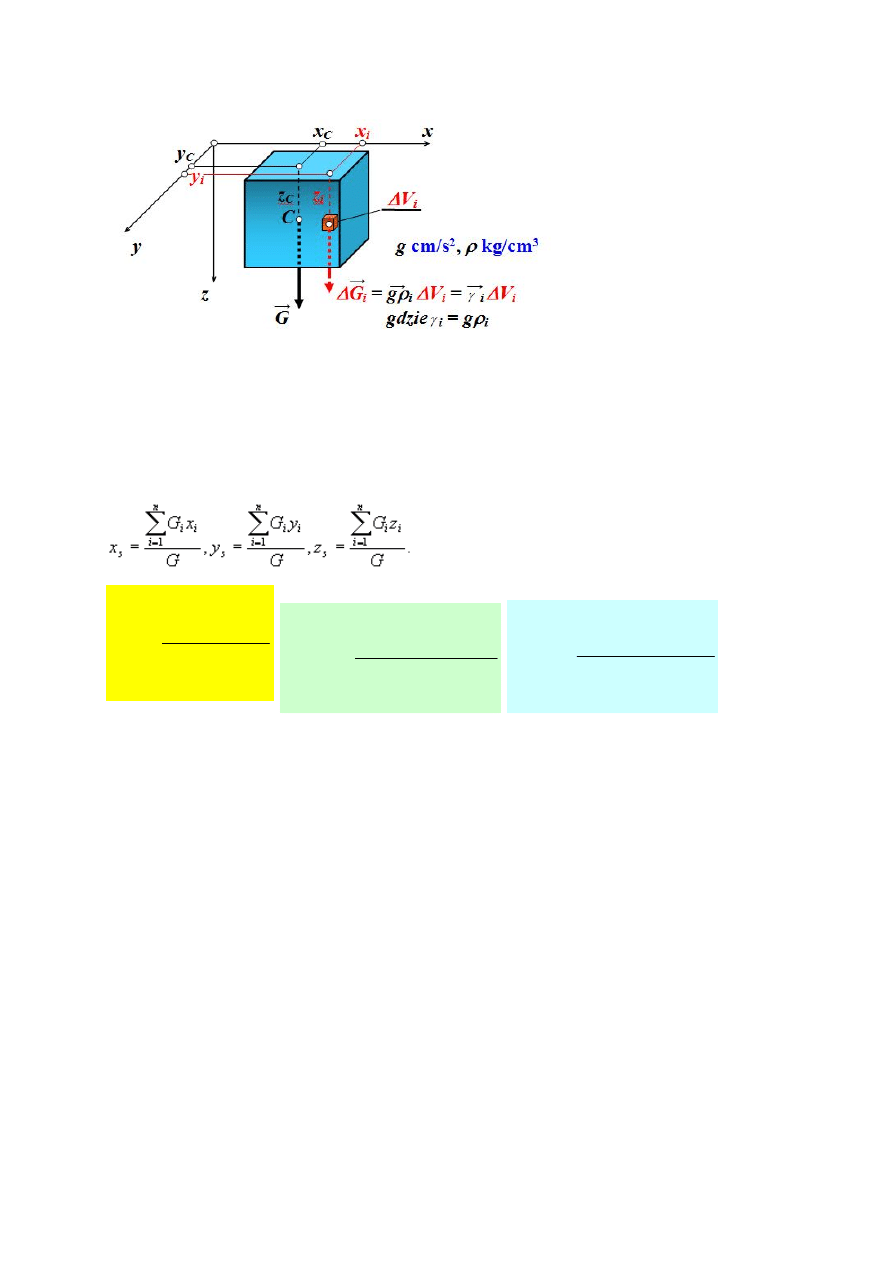
21. Środek ciężkości brył - współrzędne.
Zagadnienie wyznaczania
Ś
rodków ciężkości brył, figur płaskich i linii wiąże się
Ś
ciśle z
zagadnieniem wyznaczania
Ś
rodka sił równoległych, gdyż najczęściej spotykanym
przykładem sił równoległych są siły ciężkości (tj. siły przyciągania cząstek ciała materialnego
przez kulę ziemską), skierowane prosto do środka ziemi. Siły te możemy traktować jako
równoległe, gdyż wymiary ciał rozpatrywanych w zastosowaniach technicznych są bardzo
małe w porównaniu z promieniem kuli ziemskiej. Siły ciężko
ś
ci są szczególnym przypadkiem
sił objęto
ś
ciowych, a więc działają na każdy element objęto
ś
ci danego ciała.
Określony poprzednio środek sił równoległych w odniesieniu do sił ciężkości nazywamy
środkiem ciężkości. Ciężar ciała, czyli wypadkową sił ciężkości, możemy uważać za
przyłożony stale w środku ciężkości C, niezależnie od położenia ciała.
Określony poprzednio środek sił równoległych w odniesieniu do sił ciężkości nazywamy
środkiem ciężkości.
Po podstawieniu że Pi = ∆Gi = γi∆Vi do wzorów na położenie x
c
, y
c
, z
c
środka ciężkości C
dowolnego ciała otrzymujemy jego przybliżone położenie:
n
i
1
i
i
i
n
i
1
i
i
i
i
C
V
V
x
x
n
i
1
i
i
i
n
i
1
i
i
i
i
C
V
V
y
y
n
i
1
i
i
i
n
i
1
i
i
i
i
C
V
V
z
z
Wzory powyższe są wzorami przybliżonymi. Aby otrzymać wzory dokładne trzeba przejść do
granicy, zakładając że liczba n elementów na które podzielimy dane ciało dąży do
nieskończoności, przy jednoczesnym dążeniu do zera wszystkich ich wymiarów. Występujące
sumy .....
Najczęściej w praktyce inżynierskiej przy obliczaniu środków ciężkości bryły stosuje się
metodę dzielenia, która sprowadza się do następujących etapów:
- dokonujemy podziału bryły na proste elementy, których położenie środków ciężkości jest
znane,
- obliczamy momenty statyczne bryły względem płaszczyzn przyjętego układu
współrzędnych x, y, z. (sumując iloczyny objętości brył prostych i współrzędnych środków
ciężkości),
- obliczamy ze wzorów współrzędne środka ciężkości bryły (dzieląc momenty statyczne bryły
przez całkowitą objętość bryły).
Określenie położenia środka ciężkości przy zastosowaniu metody symetrii ułatwiają w
szczególnych przypadkach następujące twierdzenia:
- jeżeli bryła ma płaszczyznę symetrii to środek ciężkości leży w tej płaszczyźnie
- gdy bryła ma dwie płaszczyzny symetrii to środek ciężkości leży na linii ich przecinania się
- gdy bryła ma trzy płaszczyzny symetrii środek ciężkości leży w punkcie przecięcia się tych
płaszczyzn.
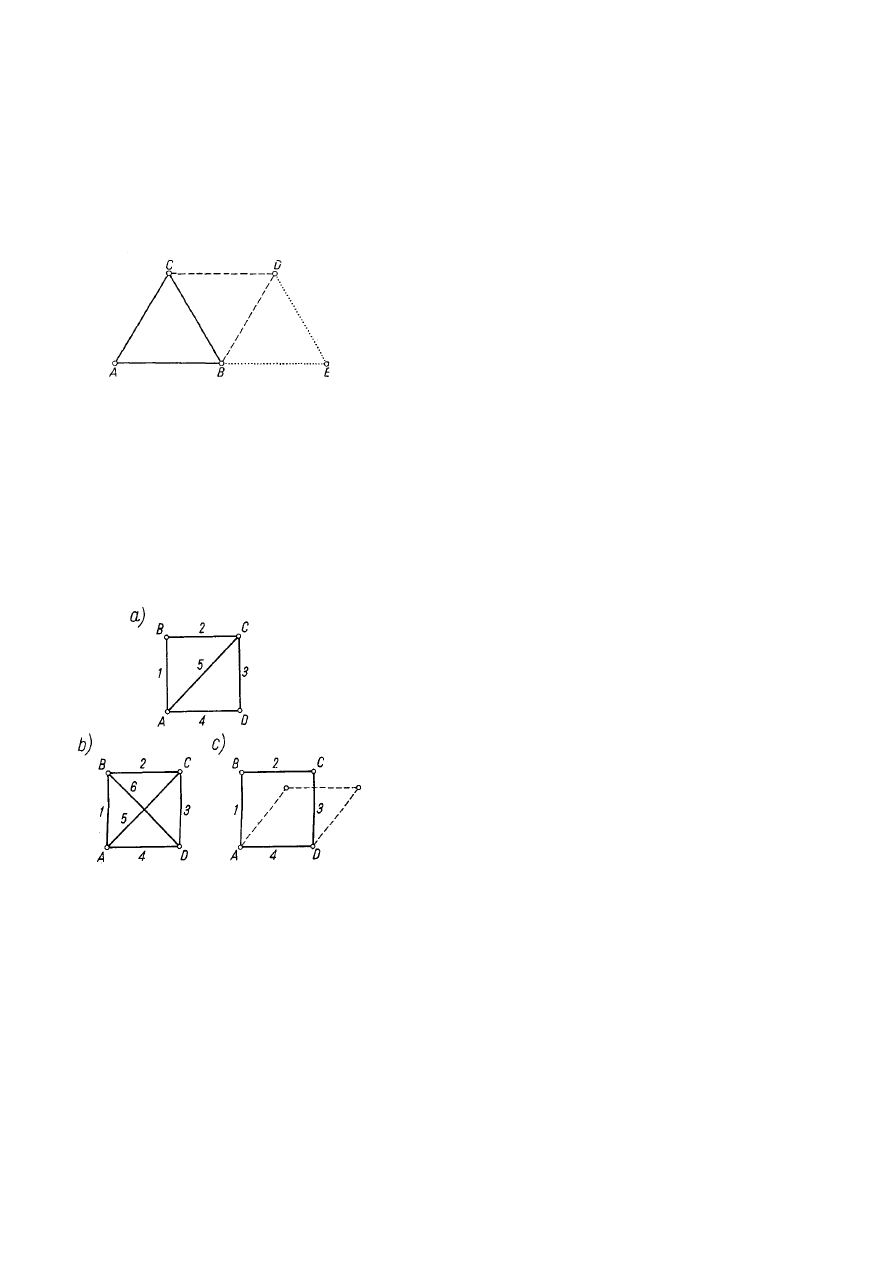
22. Warunek statycznej wyznaczalności kratownic – przykłady.
Kratownica ABC składa się z trzech prętów zakończonych przegubami. Dla utworzenia
nowego węzła potrzebne są 2 pręty.
Z zasady tworzenia nowych węzłów wynika związek:
p=2w-3
Jest to związek, który musi być spełniony, aby kratownica była niezmienna geometrycznie,
czyli inaczej, sztywna w swej płaszczyźnie
a) p=5; w=4 warunek sztywności spełniony,.
b) Układ pszesztywniony ponieważ jeśli usuniemy
jeden pręt, kratownica nadal będzie układem
niezmiennym,
c) Warunek sztywności niespełniony, ponieważ
p=4<2w-3=5
Układ może zmieniać kształt
Warunek sztywności jest konieczny ale niewystarczający w pewnych przypadkach, jedna
część kratownicy może być przesztywniona, druga zaś niedostatecznie sztywna ( np. b+c).
23. Rodzaje sił działających na kratownice.
Siły działające na kratownicę w jej płaszczyźnie w węzłach powodują powstawanie sił w
prętach. Ponieważ każdy z prętów znajduje się w równowadze, przyłożone do niego siły
muszą być równe co do wartości, przeciwne co do kierunku i muszą działać wzdłuż osi pręta.
a) pręt rozciągany (siła skierowana zawsze „ od węzła”),
b) pręt ściskany (siła skierowana zawsze „ do węzła”),
Znajomość powyższych sił jest niezbędna do projektowania kratownic.
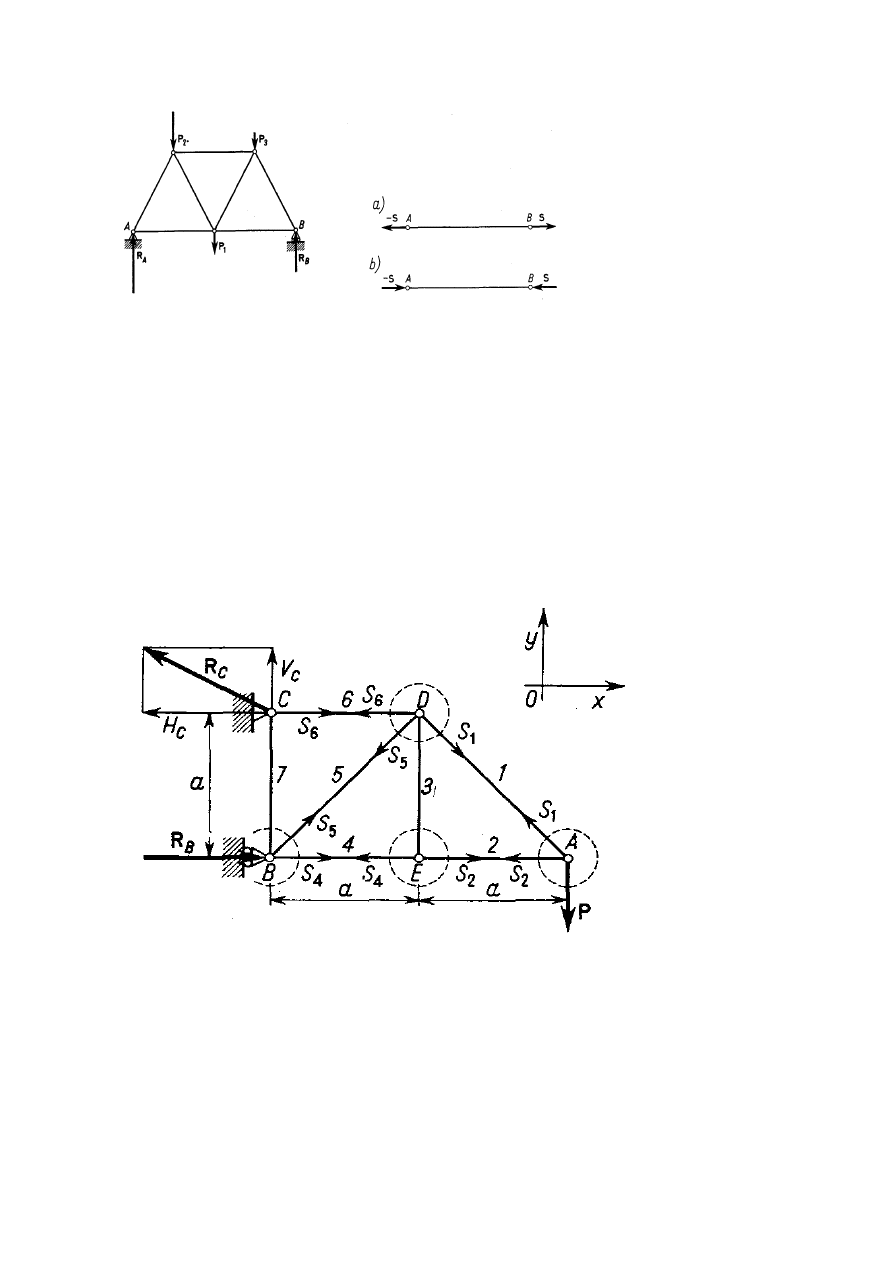
24. Analityczne wyznaczanie sił działających na pręty w kratownicy – omówienie
przykładu.
Dla wyznaczenia niewiadomych ułóżmy trzy równania równowagi dla całej kratownicy
traktowanej jako ciało sztywne, tzn. równania rzutów na oś poziomą x i pionową y oraz
równanie momentów względem punktu B:
R
B
– H
C
= 0
V
C
– P = 0

H
C
a – P
2
a = 0
Z równań tych znajdujemy
H
C
= R
B
=2P
V
C
= P
Wytnijmy myślowo węzeł A i napiszmy dla niego równaniw równowagi rzutów na osie x i y
∑Pix = -S1cos 45 – S2 = 0
∑Piy = -S1sin 45 – P = 0
Rozwiązując te równania otrzymujemy S1 = √2 P, S2 = -P
Ponieważ S2 jest <0 to siła z którą działa pręt 2 na węzeł A ma kierunek przeciwny niż
założyliśmy co oznacza, że w rzeczywistości pręt 2 jest ściskany.
Dla węzła E (zakładamy dalej że wszystkie pręty kratownicy są rozciągane)
∑Pix =S2 – S4 = 0
∑Piy = S3 = 0
Ponieważ zgodnie z drugim równaniem S2 = -P więc
S4 = -P, S3 = 0.
Pręt 4 jest więc ściskany, natomiast siła w pręcie 3 = 0.
∑Pix =S1cos45 – S5cos 45 – S6 = 0
∑Piy = -S5cos45 – S1cos45 = 0
W równaniu rzutów na oś y uwzględniono, że S3 = 0. Biorąc pod uwagę , że S1 = √2 P z
powyższych równań znajdujemy
S5 = -P√2, S6 = 2P.
Dla wyznaczenia siły w pręcie 7 ułożymy równanie równowagi dla węzła C:
∑Pix =S6 – H
C
= 0
∑Piy =V
C
– S7 = 0
Ponieważ H
C
= 2P, V
C
= P, S6 = 2P to pierwsze z powyższych równań jest spełnione
tożsamościowo a z drugiego znajdujemy S7 = P.
25. Pojęcie prętów zerowych – przykłady.
Pręty zerowe - pręty
kratownic
(płaskich lub przestrzennych) w których wartości
sił
normalnych
wynoszą zero. Aby określić położenie prętów zerowych najczęściej nie ma
potrzeby przeprowadzania obliczeń, gdyż wystarcza analiza geometrii samej kratownicy i
umiejscowienia obciążeń zewnętrznych. Określenie położenia prętów zerowych przed
rozpoczęciem obliczeń analitycznych znacznie upraszcza sam proces obliczeń.
W rozważanej poprzednio kratownicy siła wewnętrzna w pręcie 3 = 0. Pręt taki nazywamy
prętem zerowym. Pręt połączony był w węźle E z prętami 2 i 4, których osie leżały na jednej
linii prostej a do węzła tego nie była przyłożona żadna siła zewnętrzna, czyli węzeł ten nie był
obciążony.
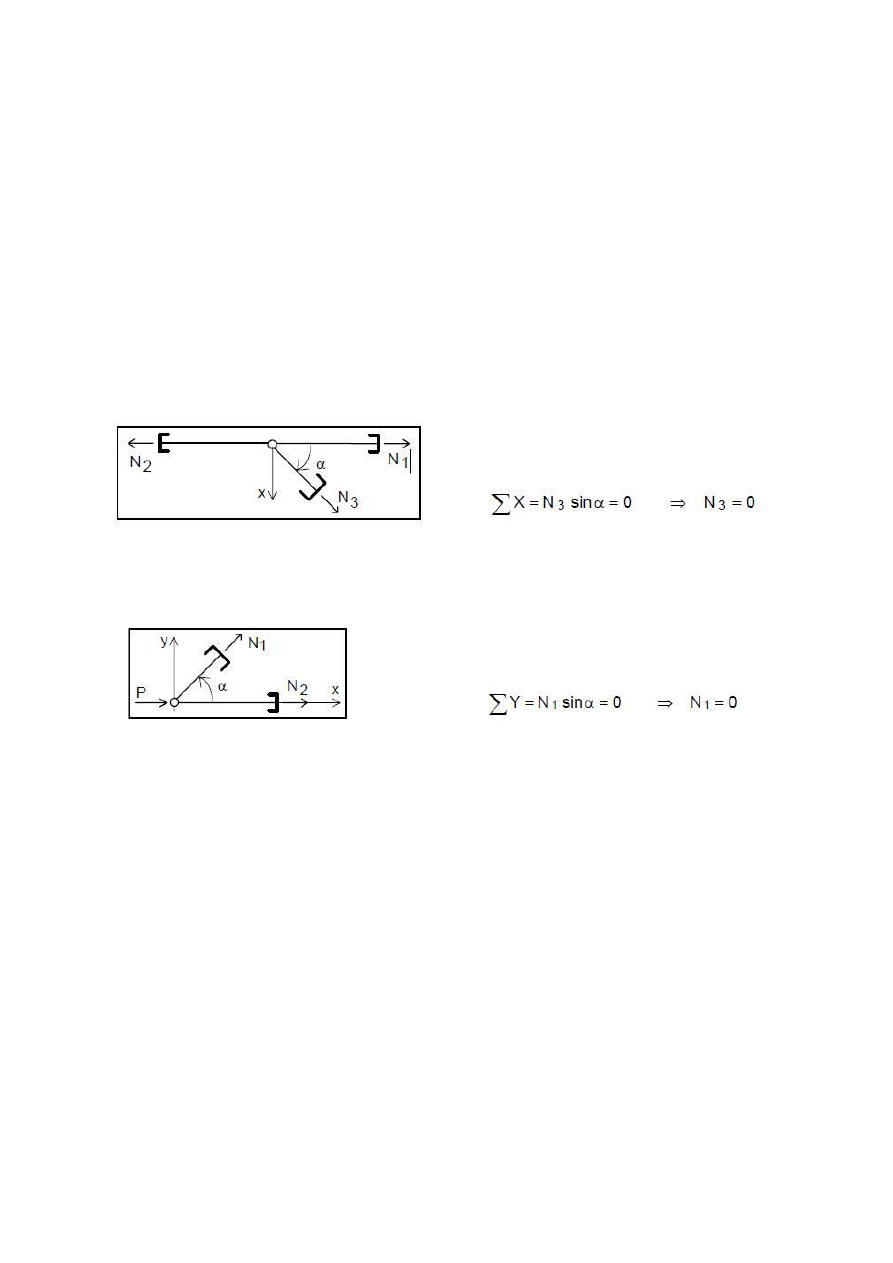
Przypadki występowania prętów zerowych:
Jeżeli w węźle kratownicy schodzą się 3 pręty, z których dwa leżą na tej samej prostej i
węzeł jest nieobciążony, to siła w trzecim pręcie jest równa zeru.
Jeżeli w węźle kratownicy schodzą się 2 pręty i węzeł jest obciążony siłą leżącą na kierunku
jednego z nich, to siła wewnętrzne w drugim pręcie jest równa zeru.
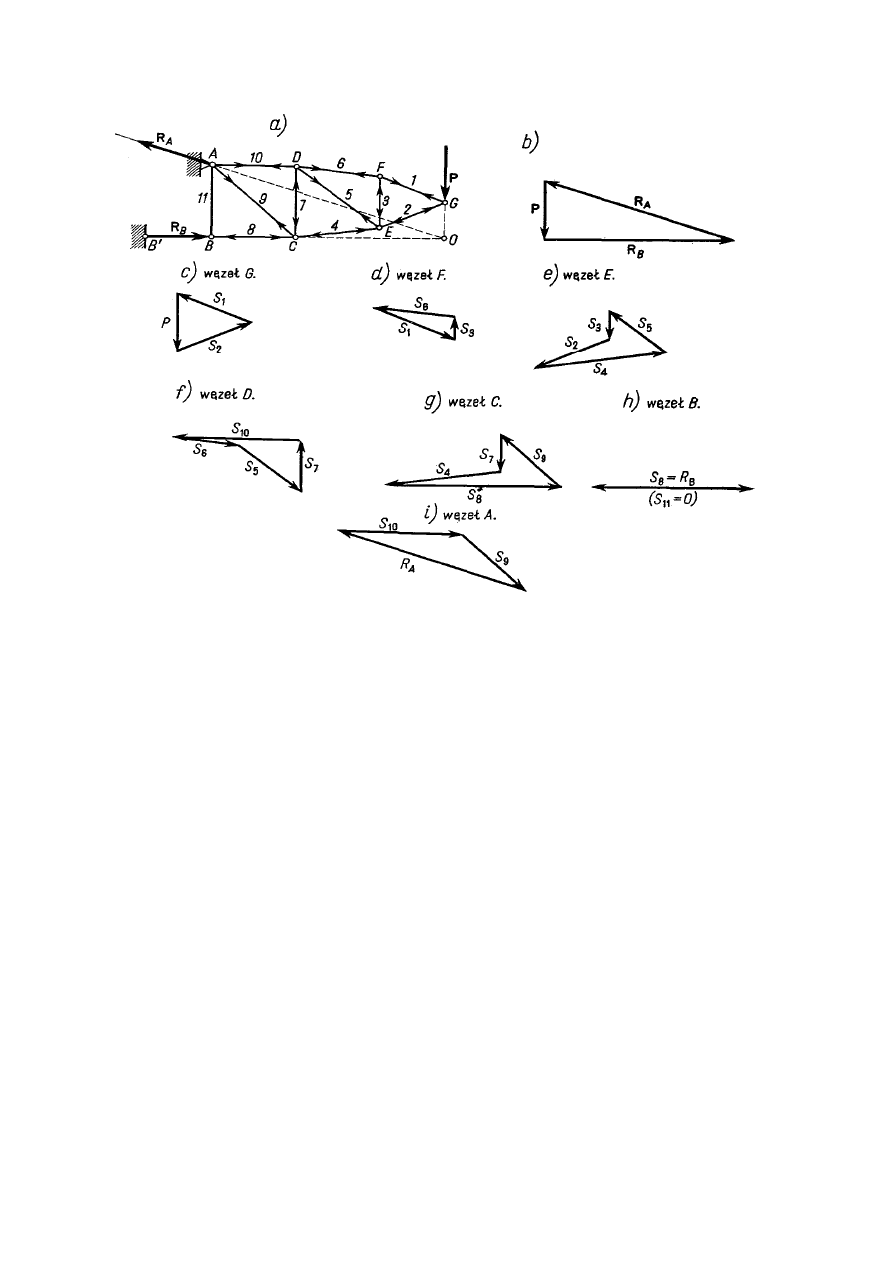
26. Metoda graficzna wyznaczania sił w kratownicach – omówienie przykładu.
W przypadku kratownicy złożonej z dużej liczby prętów metoda analityczna ze względów
rachunkowych staje się kłopotliwa i dlatego w praktyce stosuje się zwykle metodę wykreślną.
Sposób postępowania oparty na tej samej zasadzie.
Na rysunku przedstawiona jest kratownica obciążona:
27. Metoda Cremony, zasady i kolejność postępowania (przykład).
Zasady:
1. kratownica musi być kratownicą prostą.
2. siły zewnętrzna przyłożone na zewnątrz węzła są uczepione tylko w węzłach
zewnętrznych konturu kratownicy.
3. istnieje co najmniej 1 obciążony węzeł, w którym zbiegają się dwa pręty (od tego
węzła zaczynamy konstrukcję)
4. przyjmujemy kierunek obchodzenia prętów w węźle np. wg ruchu wskazówek zegara.
5. kierunek obchodzenia węzłów zgodny z kierunkiem obchodzenia prętów.
6. przy przechodzeniu od węzła do węzła musi być możliwość wyodrębnienia
następnego z dwoma niewiadomymi.
KOLEJNOŚĆ POSTĘPOWANIA:
1. sprawdzenie warunku kinematycznej niezmienności i statycznej wyznaczalności.
2. przyjęcie podziałki <skala> długości i sił.
3. wyznaczenie reakcji.
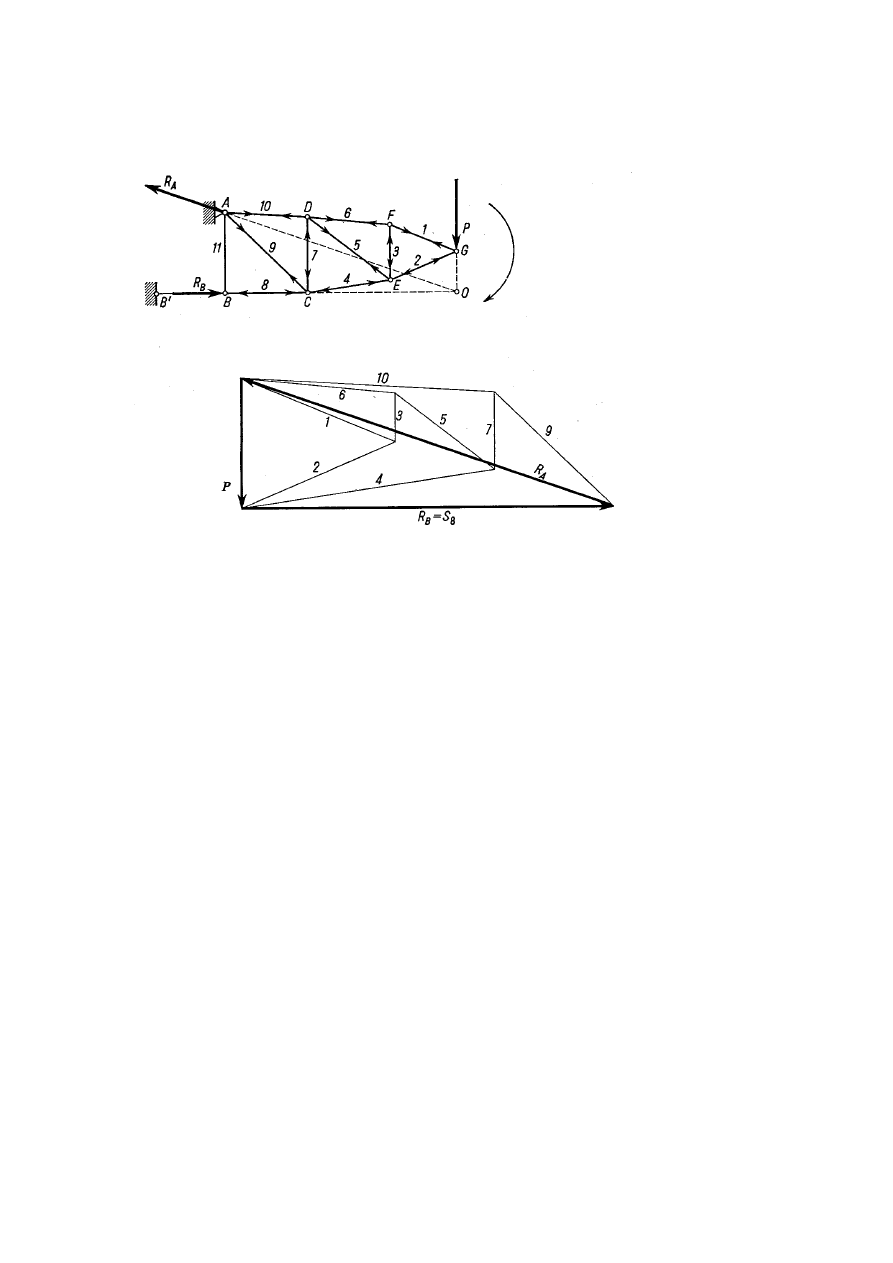
4. wykreślenie zamkniętego wieloboku sił zewnętrznych i wewnętrznych <plan
Cremony>, zaczynając od węzła w którym schodzą się co najwyżej 2 pręty.
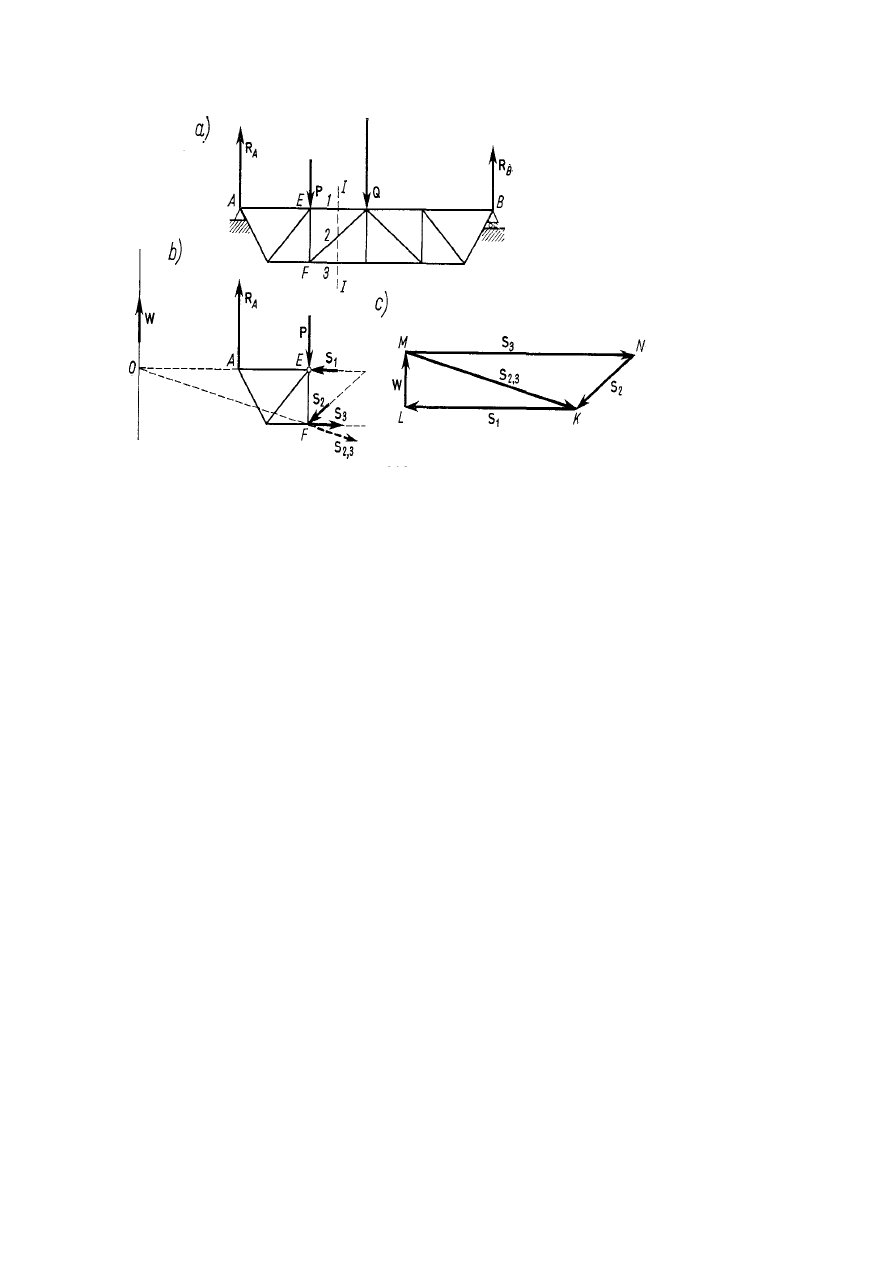
28. Metoda Rittera wyznaczania sił w kratownicach (przykład).
29. Metoda Culmana wyznaczania sił w kratownicach (przykład).
Są to metody znajdowania sił w prętach kratownic, szczególnie dogodne w przypadkach, gdy
chodzi o określenie sił w niektórych tylko prętach. Obie te metody nazwać można ogólnie
metodami przecięć w odróżnieniu od poznanych poprzednio metod polegających na
rozpatrywaniu równowagi sił w wyciętych myślowo węzłach kratownicy i nazywanych
dlatego metodami węzłów.
Metoda Rittera:
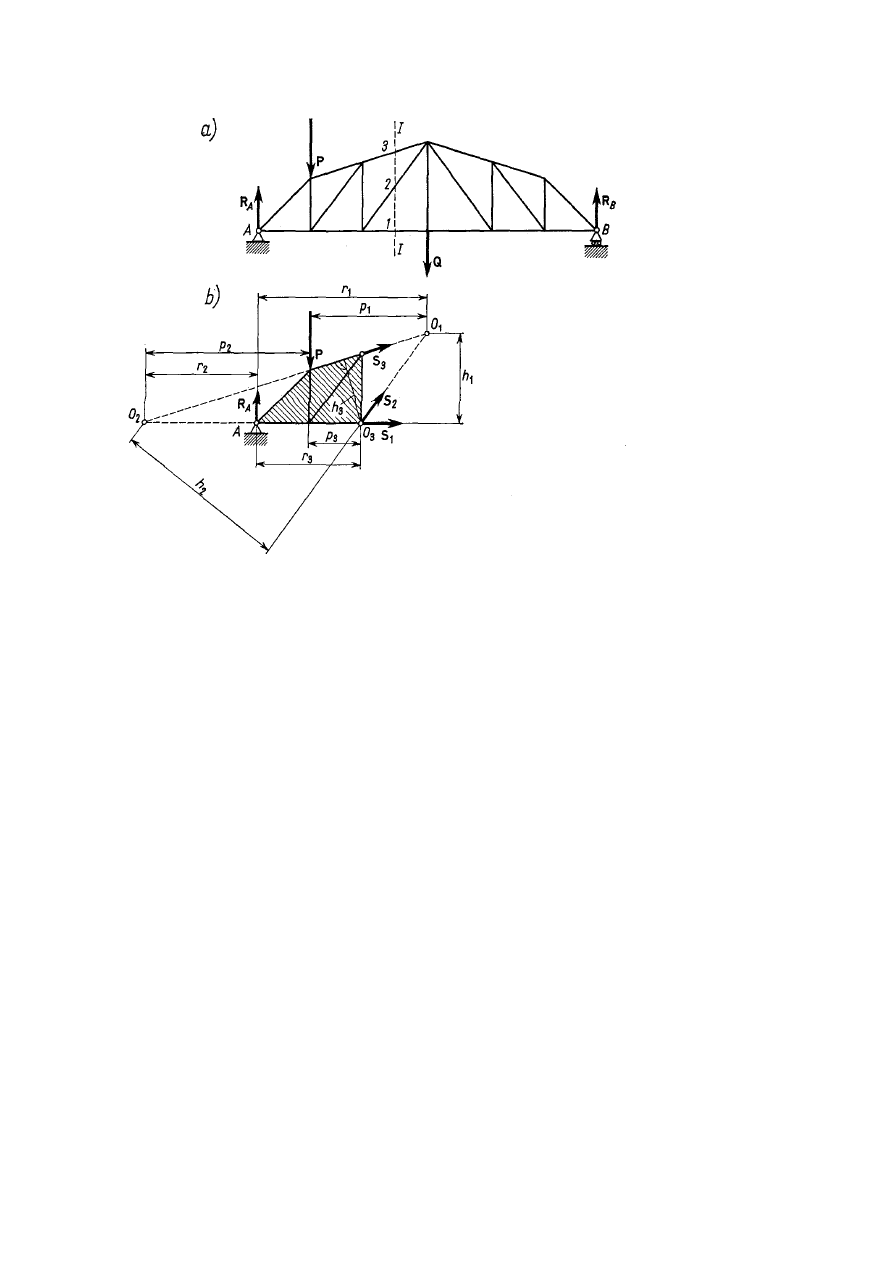
Jako równania równowagi lewej części kratownicy weźmiemy równania momentów
względem punktów O1, O2, O3, w których parami przecinają się linie działania sił S1, S2, S3.
W ten sposób w każdym z równań występować będzie tylko jedna niewiadoma.
Zakładamy, że wszystkie pręty są rozciągane.
Równania momentów względem punktów O1, O2, O3 mają odpowiednio postać, które
pozwalają wyznaczyć szukane wartości sił w prętach:
S1h1 + Pp1 – Rar1 = 0
S1 = ...
S2h2 + RAr2 – Pp2 = 0
S2 = ...
-S2h3 – Rar3 + Pp3 = 0
S3 = ....
Metoda Culmanna:
Druga metoda Culmanna, oparta jest na analogicznej zasadzie jak Rittera i polega na
prowadzeniu przekrojów przez kratownicę.
Tok postępowania przy tym sposobie
jest następujący:
– wyznaczenie sił w więziach podporowych dla całej kratownicy,
– dokonanie myślowo przekroju przez trzy pręty,
– zrównoważenie wypadkowej sił zewnętrznych oraz sił w więziach podporowych
działających na jedną z odciętych części kratownicy przez trzy siły w przeciętych
prętach, za pomocą zadania Culmanna
Wyszukiwarka
Podobne podstrony:
Mechanika - Statyka, statykawyklad1, Statyka Wykład 1
Zasady statyki pop, I semestr, mechanika teoretyczna
Mechanika - Statyka, statykawyklad2, Statyka Wykład 2
Mechanika - Statyka, statykawyklad4, Statyka Wykład 4
Mechanika płynów zaliczenie wykładów
mechanika-test-odp, Chemia budowlana, Geometria wykreślna, Mechanika teoretyczna
xdzfgxh, Chemia budowlana, Geometria wykreślna, Mechanika teoretyczna
mechanikasciaga, Budownictwo PK, Mechaniaka teoretyczna
Mechanika Techniczna I Statyka Płaski Układ Sił
mechanika teoretyczna 01
ŚCIĄGI, Sciaga 1, Mechanika płynów - część mechaniki teoretycznej, zajmuje się badaniem ruchu płynów
2, mechanika gl!!!!!!, Statyka
Mechanika Techniczna I Statyka Tarcie
ZAGADNIENIA NA EGZAMIN Z MECHANIKI TECHNICZNEJ II DLA SEMESTRU III, sem III, +Mechanika Techniczna I
Modele i mechanizmy integracji gospodarczej, Wykłady inne
więcej podobnych podstron