„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Jerzy Kozłowicz
Uruchamianie przetworników i regulatorów 731[01].Z2.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Krzysztof Idzior
mgr inż. Roman Grobelny
Opracowanie redakcyjne:
mgr inż. Jerzy Kozłowicz
Konsultacja:
mgr inż. Ryszard Dolata
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 731[01].Z2.01
„Uruchamianie przetworników i regulatorów”, zawartego w modułowym programie
nauczania dla zawodu mechanik automatyki przemysłowej i urządzeń precyzyjnych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
4
2.
6
3.
7
4.
Wprowadzenie
Wymagania wstępne
CC Cele kształcenia
Materiał nauczania
8
4.1. Przetworniki ciśnienia
8
4.1.1. Materiał nauczania
8
4.1.2. Pytania sprawdzające
11
4.1.3. Ćwiczenia
11
4.1.4. Sprawdzian postępów
13
4.2. Przetworniki temperatury
14
4.2.1. Materiał nauczania
14
4.2.2. Pytania sprawdzające
15
4.2.3. Ćwiczenia
15
4.2.4. Sprawdzian postępów
17
4.3. Przetworniki binarne
18
4.3.1. Materiał nauczania
18
4.3.2. Pytania sprawdzające
21
4.3.3. Ćwiczenia
21
4.3.4. Sprawdzian postępów
22
4.4. Przetworniki cyfrowe kąta
23
4.4.1. Materiał nauczania
23
4.4.2. Pytania sprawdzające
25
4.4.3. Ćwiczenia
25
4.4.4. Sprawdzian postępów
26
4.5. Wzmacniacze pneumatyczne i elektryczne
27
4.5.1. Materiał nauczania
27
4.5.2. Pytania sprawdzające
31
4.5.3. Ćwiczenia
31
4.5.4. Sprawdzian postępów
35
4.6. Regulatory bezpośredniego działania
36
4.6.1. Materiał nauczania
36
4.6.2. Pytania sprawdzające
39
4.6.3. Ćwiczenia
39
4.6.4. Sprawdzian postępów
41
4.7. Regulatory pneumatyczne i elektroniczne
42
4.7.1. Materiał nauczania
42
4.7.2. Pytania sprawdzające
44
4.7.3. Ćwiczenia
44
4.7.4. Sprawdzian postępów
46
4.8. Regulatory dwustanowe
47
4.8.1. Materiał nauczania
47
4.8.2. Pytania sprawdzające
50
4.8.3. Ćwiczenia
50
4.8.4. Sprawdzian postępów
52

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
4.9. Programatory
53
4.9.1. Materiał nauczania
53
4.9.2. Pytania sprawdzające
54
4.9.3. Ćwiczenia
54
4.9.4. Sprawdzian postępów
54
5. Sprawdzian osiągnięć
55
6. Literatura
60

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy o zasadach uruchamiania
przetworników i regulatorów.
W poradniku zamieszczono:
−
wymagania wstępne, czyli wykaz umiejętności, jakie powinieneś umieć przed
przystąpieniem do nauki,
−
cele kształcenia, jakie powinieneś osiągnąć w czasie zajęć edukacyjnych tej jednostki
modułowej,
−
materiał nauczania – czyli wiadomości dotyczące metod badania i uruchamiania
przetworników i regulatorów,
−
zestawy pytań, które pomogą Ci sprawdzić, czy opanowałeś podane treści nauczania,
−
ćwiczenia, które umożliwią Ci nabycie umiejętności praktycznych,
−
sprawdzian osiągnięć,
−
wykaz literatury.
W materiale nauczania opisano budowę i zasady uruchamiania różnych przetworników
pomiarowych, programatorów oraz zasady ich uruchamiania. Poza opisem teoretycznym
przetworników i regulatorów w części ćwiczeniowej zaproponowano zestawy układów
praktycznych, które będą wykonywane przez grupy ćwiczeniowe.
Z rozdziałem Pytania sprawdzające możesz zapoznać się:
–
przed przystąpieniem do rozdziału Materiał nauczania – poznając przy tej okazji
wymagania wynikające z potrzeby zawodu, lub po przyswojeniu wskazanych treści,
odpowiadając na te pytania sprawdzisz stan gotowości do wykonywanych ćwiczeń,
–
po zapoznaniu się z rozdziałem Materiał nauczania, aby sprawdzić stan swojej wiedzy,
która będzie Ci potrzebna do wykonywania ćwiczeń.
Wykonując ćwiczenia zawarte w Poradniku
lub ćwiczenia zaproponowane przez
nauczyciela poznasz zasady uruchamiania podstawowych urządzeń automatyki.
Po wykonaniu ćwiczeń sprawdź poziom swoich postępów rozwiązując test Sprawdzian
postępów, zamieszczony po ćwiczeniach. W tym celu:
–
przeczytaj pytania i odpowiedz na nie,
–
podaj odpowiedź wstawiając X w odpowiednie miejsce.
Odpowiedź NIE wskazuje na luki w Twojej wiedzy, informuje Cię również o pewnych
brakach w przyswajanej przez Ciebie wiedzy. Oznacza to powrót do treści, które nie są
dostatecznie opanowane.
Poznanie przez Ciebie wszystkich wiadomości lub ich
części w zakresie
uruchamiania
przetworników i regulatorów będzie podstawą do przeprowadzenia przez nauczyciela
sprawdzianu poziomu przyswajanych wiadomości i ukształtowaniu umiejętności.
W rozdziale 5 tego poradnika jest zamieszczony Sprawdzian osiągnięć, który zawiera:
–
instrukcję, w której omówiono tok postępowania podczas przeprowadzania sprawdzianu,
–
zestaw zadań testowych,
–
przykładową kartę odpowiedzi, w której, w przeznaczonych miejscach wpisz odpowiedź
na pytania; będzie to stanowić dla Ciebie trening przed sprawdzianem zaplanowanym
przez nauczyciela.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
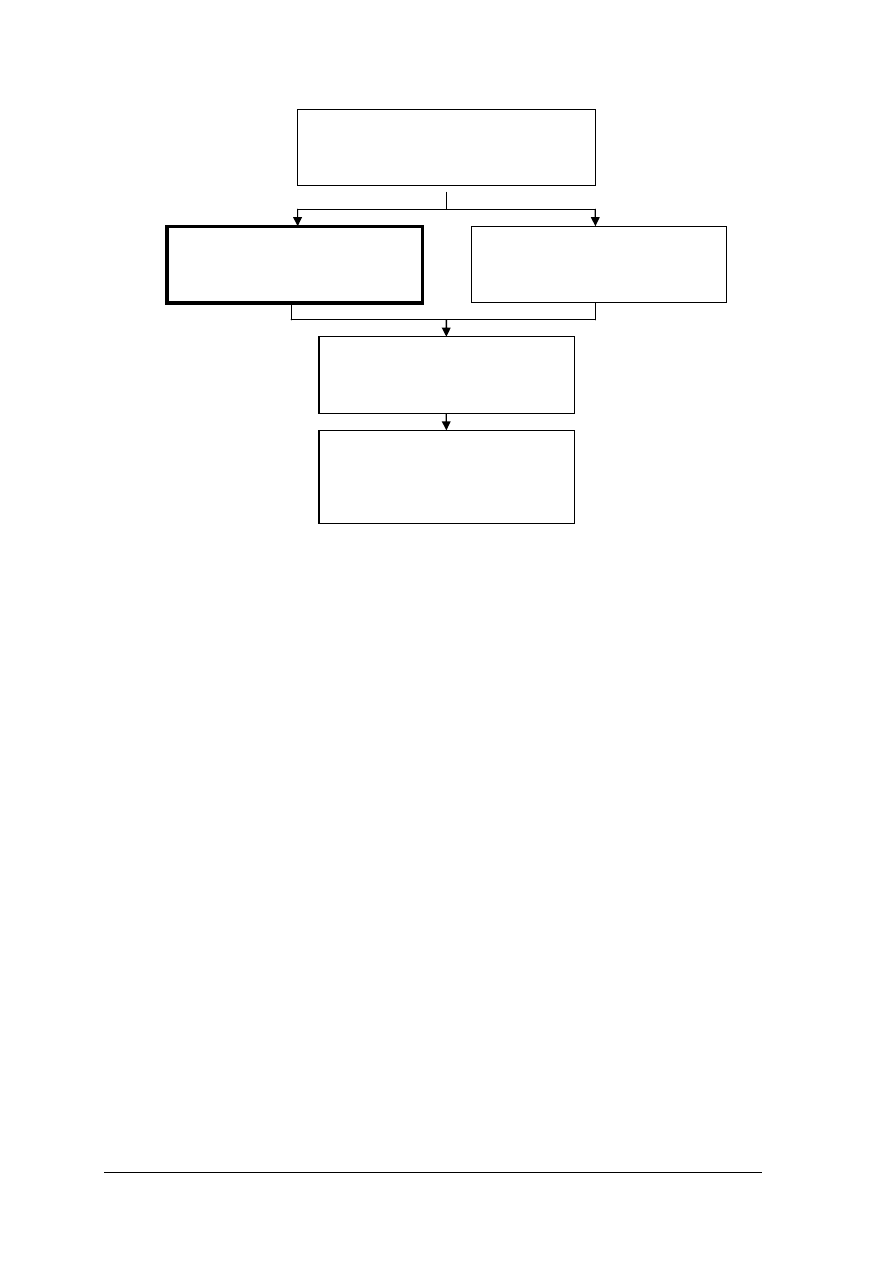
Schemat układu jednostek modułowych
731[01].Z2
Układy automatyki przemysłowej
i urządzenia precyzyjne
731[01].Z2.01
Uruchamianie przetworników
i regulatorów
731[01].Z2.02
Obsługiwanie zespołów napędowych
i nastawczych
731[01].Z2.04
Stosowanie elementów sterowania
i zabezpieczeń w urządzeniach
precyzyjnych
731[01].Z2.03
Określanie konstrukcji wybranych
urządzeń precyzyjnych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
korzystać z różnych źródeł informacji,
−
stosować jednostki układu SI,
−
przeliczać jednostki,
−
wykonywać wykresy funkcji,
−
użytkować komputer,
−
wyjaśniać znaczenie członów automatyki,
−
analizować charakterystyki regulatorów i przetworników,
−
stosować symbole elementów automatyki,
−
rozróżniać nastawy regulatorów,
−
podłączać aparaturę kontrolno – pomiarową elektryczną i mechaniczną,
−
dobierać zakresy pomiarowe mierników elektrycznych,
−
współpracować w grupie,
−
stosować przepisy BHP.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
wyjaśnić cel stosowania przetwornika w automatyce,
−
opisać metody przetwarzania wielkości fizycznych na sygnały standardowe,
−
wyjaśnić zasady działania przetworników pomiarowych (siły, przesunięcia) na sygnały
elektryczne i pneumatyczne oraz uruchomić przetwornik,
−
objaśnić pojęcia przetworników binarnych i cyfrowych,
−
uruchomić przetworniki analogowe i cyfrowe,
−
objaśnić budowę i działanie regulatorów bezpośredniego działania: temperatury, poziomu
i ciśnienia oraz uruchomić regulator,
−
opisać rodzaje stosowanych w automatyce wzmacniaczy,
−
przedstawić działanie pneumatycznych regulatorów mieszkowych,
−
objaśnić budowę i uruchomić regulator elektryczny ciągły i cyfrowy,
−
opisać działanie regulatora dwu i trzystanowego,
−
wyjaśnić role programatorów w sprzęcie gospodarstwa domowego,
−
skorzystać z dokumentacji technicznej i PN,
−
zastosować zasady bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
oraz ochrony środowiska podczas wykonywania pracy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
4. MATERIAŁ NAUCZANIA
4.1. Przetworniki
ciśnienia
4.1.1. Materiał nauczania
Poznałeś już urządzenia pomiarowe, w których źródłem sygnału jest czujnik pomiarowy.
Sygnał wyjściowy z czujnika tylko niekiedy nadaje się do bezpośredniego wykorzystania
w układzie regulacji. Dla umożliwienia łączenia urządzeń automatyki takich jak regulatory,
rejestratory, wskaźniki, siłowniki, układy CRPD jest niezbędna standaryzacja sygnałów
wejściowych i wyjściowych. Obecnie przyjęto standaryzację sygnałów elektrycznych
i pneumatycznych na następujących poziomach:
a) sygnały elektryczne prądowe: 0–20 mA lub 4–20 mA,
b) sygnały elektryczne napięciowe:
±
10 V,
c) sygnały pneumatyczne 20–100 kPa,
d) standardy cyfrowe – np. HART, PROFIBUS - PA.
Sygnał pomiarowy z czujnika, zanim przyjmie wartość standardową, jest poddawany
obróbce, podczas której jego postać ulega wielokrotnie zmianie. Te przemiany dokonują
się w urządzeniach zwanych przetwornikami. Sygnał wyjściowy z przetwornika uzyskuje
standard, który przedstawiono w punktach od a) do c). Przetworniki są budowane jako układy
bez sprzężenia zwrotnego lub jako autokompensacyjne układy ze sprzężeniem zwrotnym.
Przetworniki ze sprzężeniem zwrotnym charakteryzują się większą dokładnością. Poza
funkcją przetwarzania sygnału z czujnika pomiarowego na sygnał standardowy są również
produkowane
przetworniki, które pełnią funkcje łączenia dwóch systemów automatyki,
na przykład systemu
pneumatycznego z systemem elektrycznym i odwrotnie.
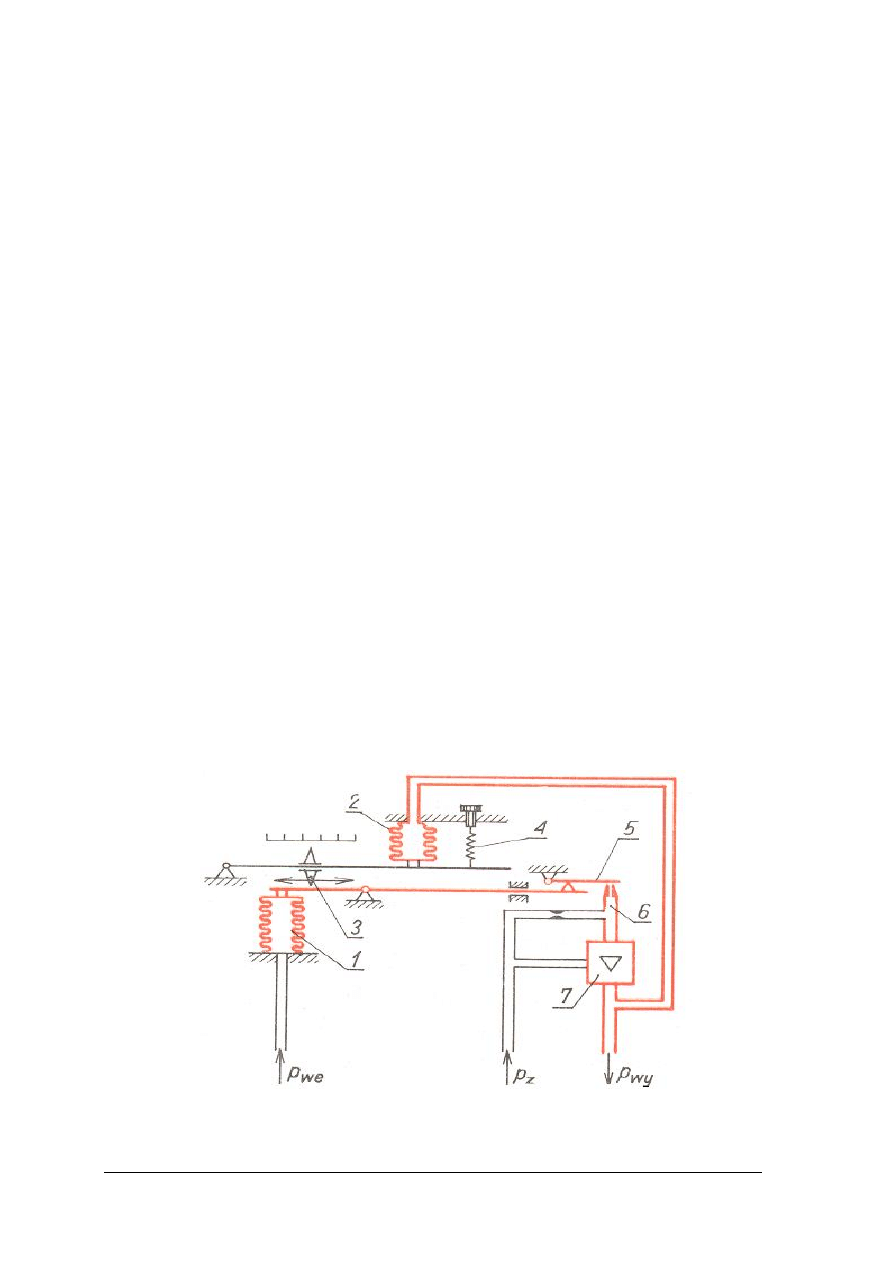
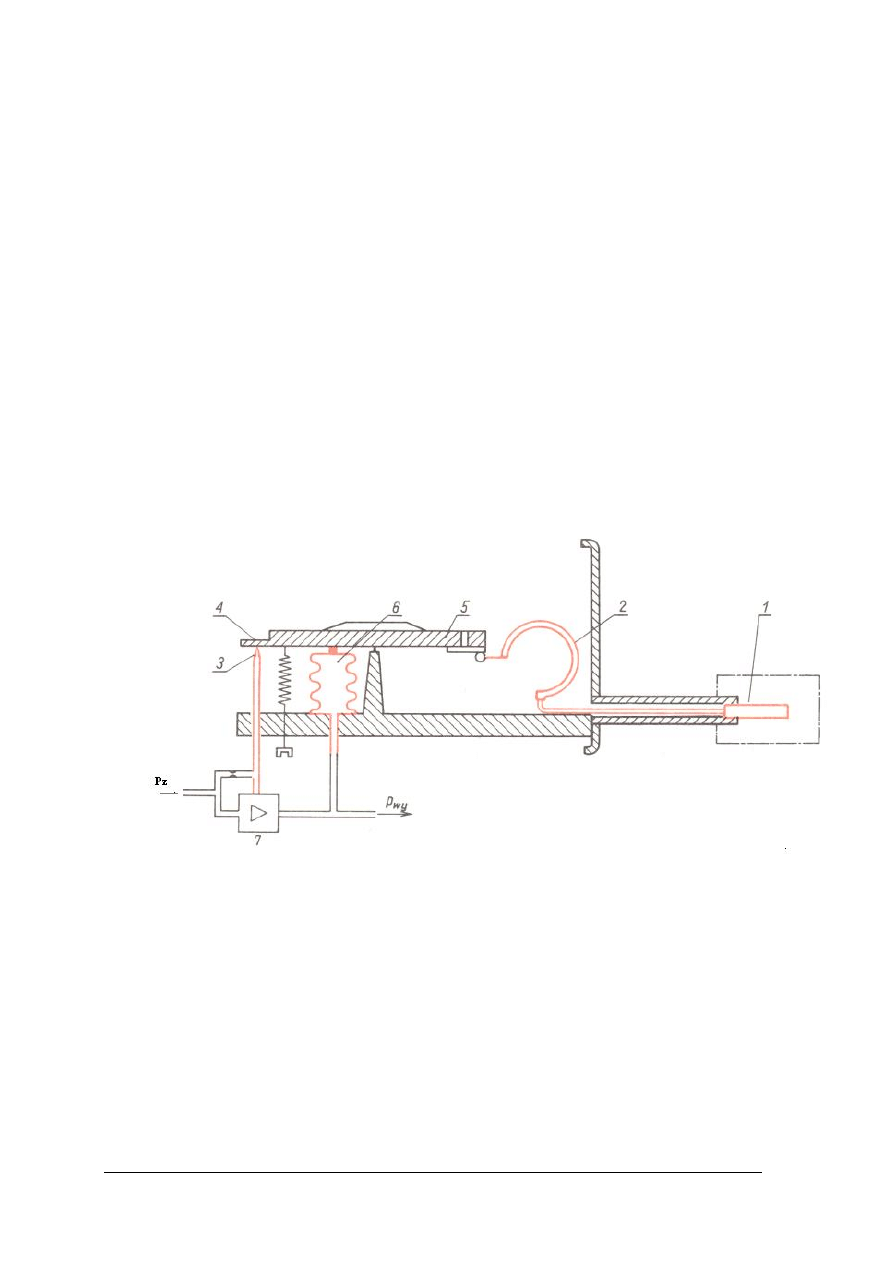
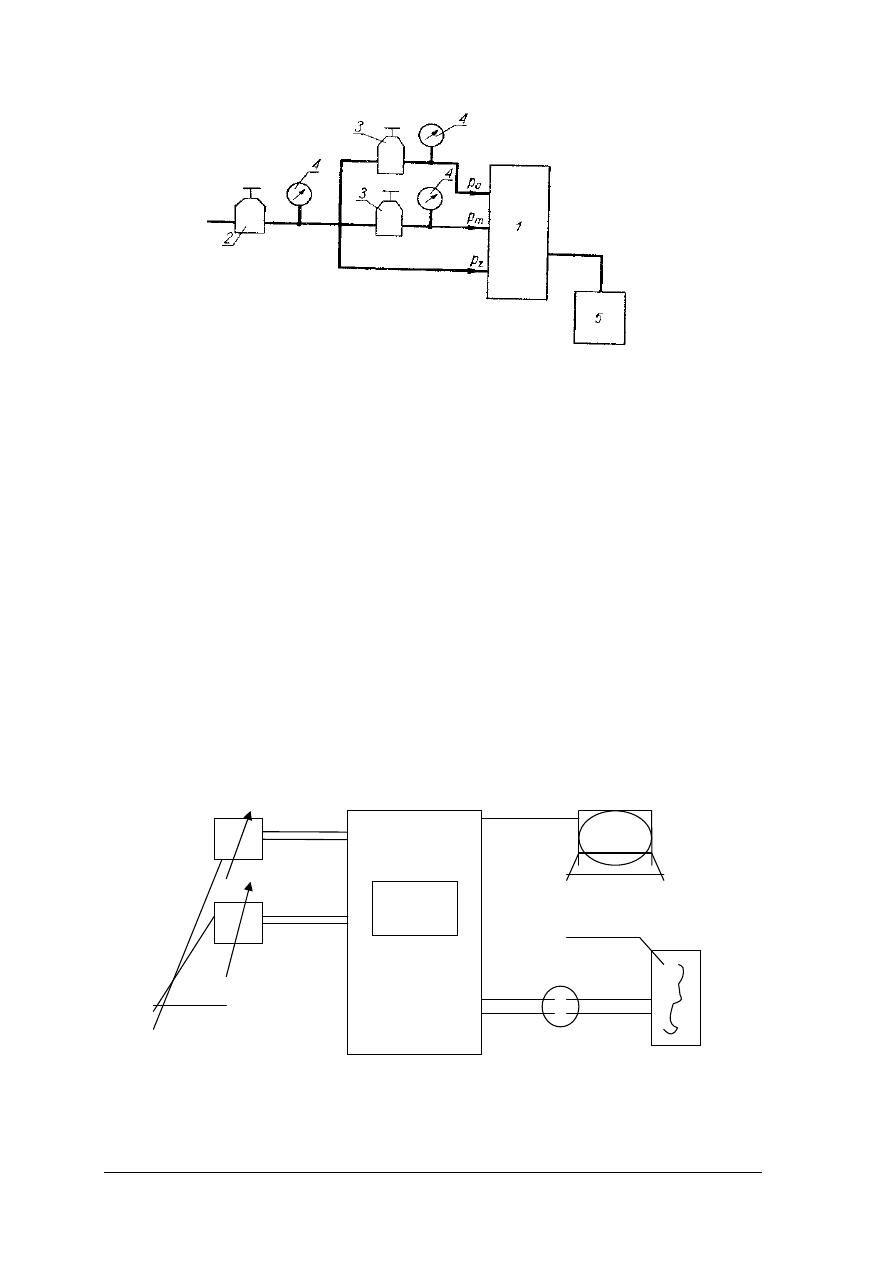
Przetworniki ciśnienia z pneumatycznym sygnałem wyjściowym
Działanie tych przetworników oparte jest na zasadzie kompensacji sił. Przetworniki
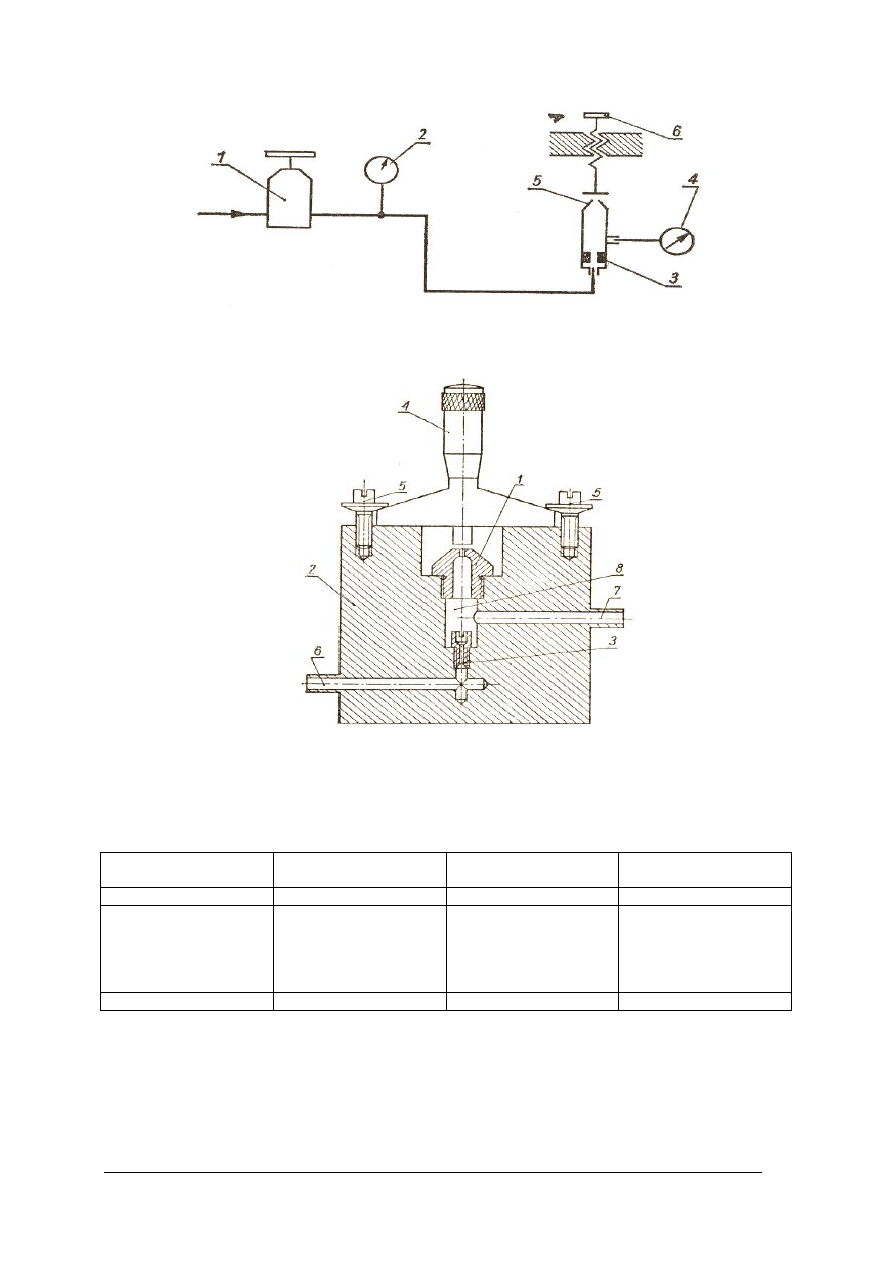
wykonywane są na różne zakresy pomiarowe średnich i wysokich ciśnień. Na rysunku
nr 1 przedstawiono pneumatyczny przetwornik średnich ciśnień o zakresie mierzonego
ciśnienia od 0 do 6 kPa oraz od 0 do 500 kPa.
Rys. 1. Przetwornik pneumatyczny średnich ciśnień: 1 – mieszek wejściowy,
2 – mieszek sprzężenia zwrotnego, 3 – regulacja zakresu, 4 – sprężyna zerująca,
5 6 – zespół dysza - przysłona, 7 – wzmacniacz [5, s. 91]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Ciśnienie mierzone podawane jest do mieszka wejściowego 1, który poprzez system
dźwigni przesuwa przysłonę 5 względem dyszy 6. Ciśnienie z układu dysza – przysłona
po wzmocnieniu kierowane jest do mieszka sprzężenia zwrotnego 2, a jednocześnie na
wyjście przetwornika. Jest to jakby zamknięty układ regulacji. Zakres pomiarowy zależy od
wymiaru mieszków oraz przełożenia miedzy nimi.
Aby uruchomić ten przetwornik należy po podłączeniu zasilania p
z
ustawić położenie
śruby zerującej 4 na wartość początkową standardowego ciśnienia wyjściowego, oraz ustawić
położenie przekładni 3
zapewniając końcową wartość standardowego sygnału wyjściowego
odpowiadającą przetwarzanemu zakresowi.
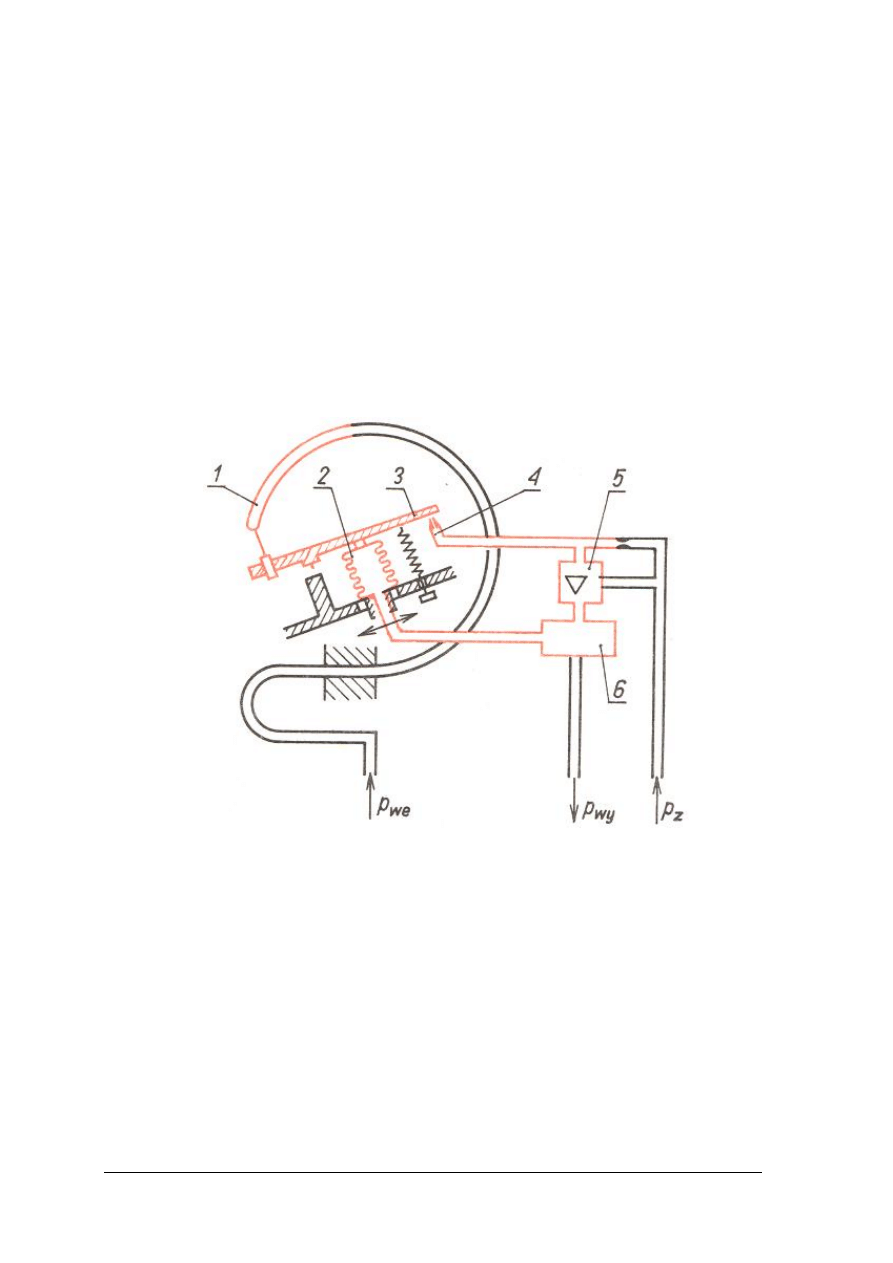
W przetworniku pneumatycznym wysokiego ciśnienia elementem pomiarowym jest rurka
Bourdona (rys. 2). Jej odkształcenie powoduje przesunięcie dźwigni i zmianę odległości
układu dysza – przysłona. Pozostała część przetwornika działa podobnie jak przetwornika
poprzedniego. Zakres pomiarowy przetwornika zależy od parametrów mechanicznych
rurki
Bourdona. Dokładna regulacja odbywa się przez zmianę położenia mieszka sprzężenia
zwrotnego i zmianę naciągu sprężyny zerującej.
Rys. 2.
Przetwornik pneumatyczny wysokiego ciśnienia: 1 – rurka Bourdona, 2 – mieszek
sprzężenia zwrotnego, 3, 4 – układ dysza - przysłona, 5 – wzmacniacz, 6 – komora
stabilizująca [5, s. 92]
Poza pneumatycznymi przetwornikami ciśnienia, stosowane są
także przetworniki
różnicy ciśnień. Działanie tych przetworników oparte jest na zespołach membran, które
przetwarzają różnicę ciśnień na przesunięcia dźwigni, a dalej poprzez znany już układ
mieszków i wzmacniaczy na pneumatyczny standardowy sygnał wyjściowy.
Przetworniki ciśnienia z elektrycznym sygnałem standardowym
W praktyce jest wiele odmian przetworników ciśnienia wykorzystujących różne zjawiska
fizyczne
pozwalające
zamienić
ciśnienie
na
wielkość
elektryczną.
Najczęściej
są to przetworniki ciśnienia pojemnościowe i piezorezystancyjne
.
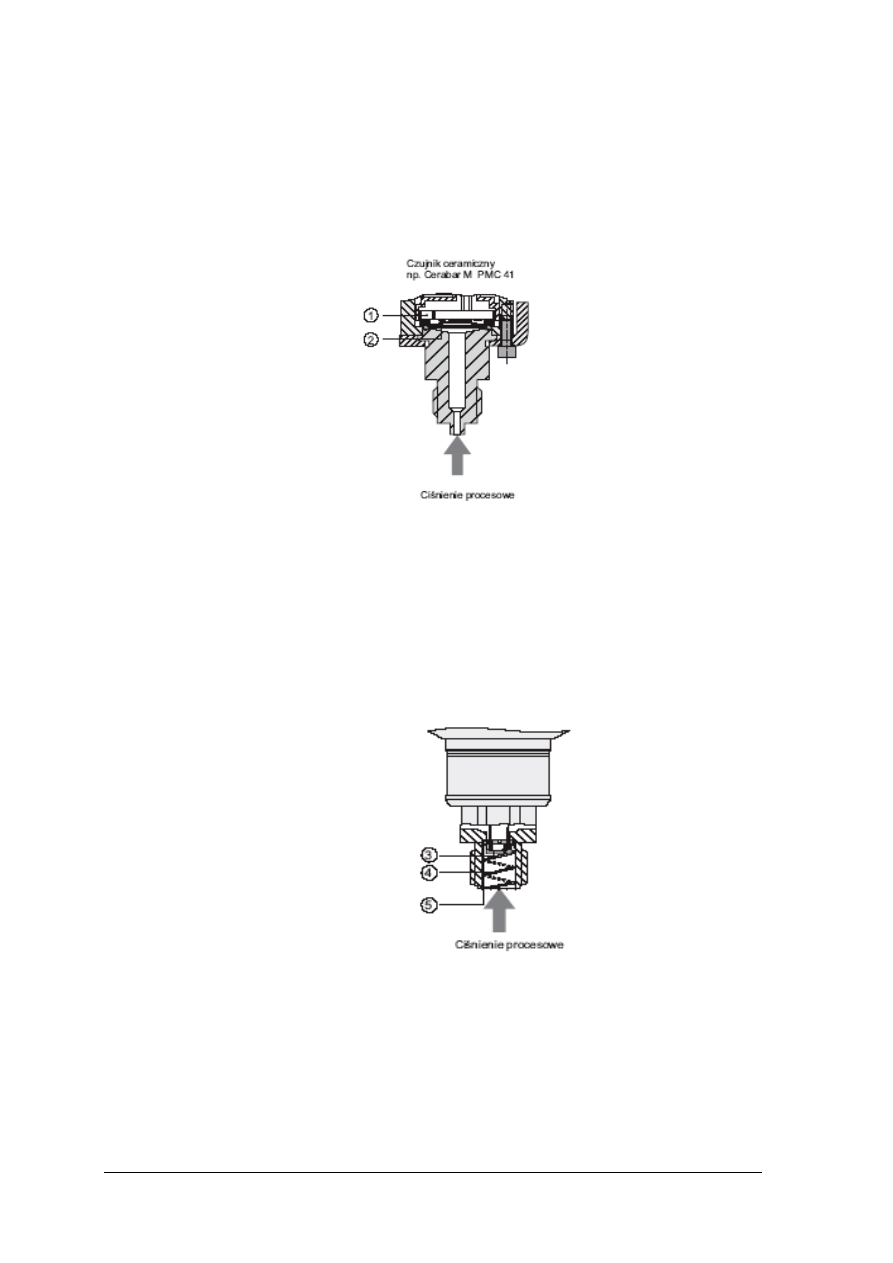
Przetwornik elektryczny pojemnościowy z czujnikiem ceramicznym jest czujnikiem
suchym, to znaczy ciśnienie procesowe oddziaływuje bezpośrednio na ceramiczną membranę,
uginając ją maksymalnie o 0,025 mm (rys. 3). Ugięcie wywołuje zmianę pojemności
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
elektrycznej kondensatora utworzonego pomiędzy membraną pomiarową, a ceramicznym
podłożem. Zakres pomiarowy czujnika jest determinowany grubością membrany. Zaletą
takiego przetwornika jest:
–
przeciążalność sięgająca 40 – krotności zakresu nominalnego (maks. 60 bar),
–
ekstremalnie wysoka odporność na korozję, porównywalna z Hastelloyem lub tantalem,
–
całkowita odporność na wysoką próżnię,
–
materiał czujnika (AI203) nadaje się szczególnie do zastosowań higienicznych.
Rys. 3.
Czujnik pojemnościowy przetwornika: 1 – podłoże ceramiczne, 2 – ceramiczna
membrana pomiarowa [Endress+Hauser]
W elektrycznym piezorezystancyjnym przetworniku (rys. 4), ciśnienie procesowe działa
na metalową membranę, przez ciecz wypełniająca przestrzeń między membraną,
a krzemowym czujnikiem piezorezystancyjnym. Ciśnienie napierające na czujnik
piezorezystancyjny powoduje zmianę rezystancji mostka. Parametry elektryczne mostka
są mierzone i przetwarzana przez układ mikroprocesorowy. Zaletą takiego przetwornika jest:
–
zakres pomiarowy do 400 bar,
–
wysoka stabilność długoterminowa,
–
przeciążalność sięgająca 4 – krotności zakresu nominalnego (maks. 600 bar).
Rys. 4.
Czujnik piezorezystancyjny przetwornika: 3 – krzemowy element pomiarowy,
4 – kanalik z cieczą wypełniającą, 5 – metalowa membrana oddzielająca (spawana)
[Endress+Hauser]
Przetworniki te posiadają trzy wersje elektroniki:
–
elektronika analogowa jest najprostsza i najtańsza. Umożliwia lokalne ustawienie zera,
zakresu oraz tłumienia,
–
elektronika inteligentna posiada wiele dodatkowych funkcji. Obsługa może być
dokonywana zarówno lokalnie jak i zdalnie za pomocą komunikatora HART lub PC
z programem obsługowym, np. Commuwin II,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
–
elektronika PROFIBUS-PA pozwala na bezpośrednie podłączenie przetwornika
do magistrali PROFIBUS-PA. Przetwornik jest programowany zdalnie, na przykład
za pomocą programu Commuwin II.
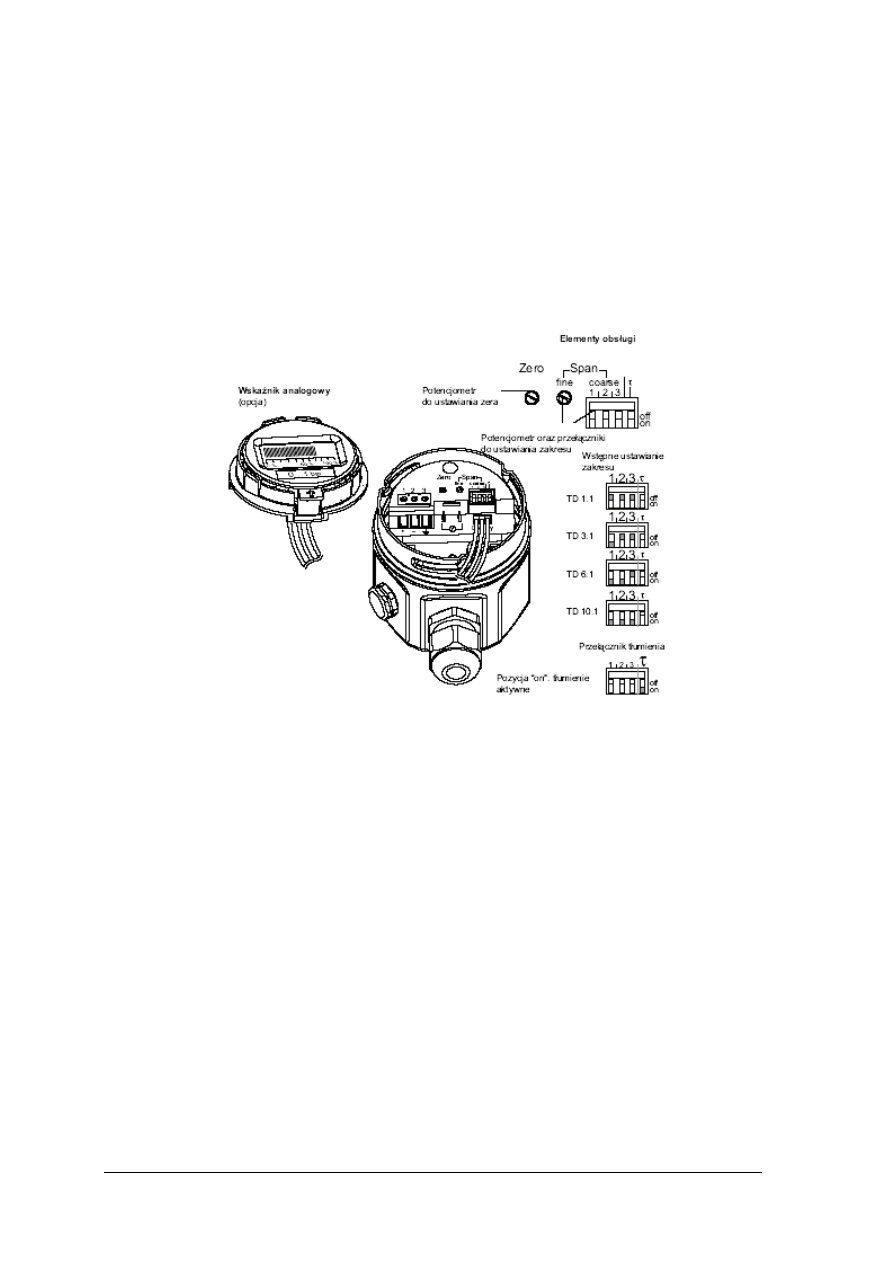
Regulacja
przetwornika wyposażonego w
elektronikę analogową przeprowadzana jest
następująco: do ustawienia zera oraz zakresu pomiarowego służą dwa potencjometry. Podczas
ustawiania zakresu konieczne jest zadanie ciśnienia referencyjnego. Wstępna regulacja
zakresu realizowana jest za pomocą trzech przełączników, dzielących zakres nominalny
od 1:1 do 10:1. Dodatkowym przełącznikiem aktywuje się tłumienie sygnału wyjściowego.
Wskaźnik analogowy przedstawia wartość mierzoną, odniesioną do zakresu ustawionego.
Przekroczenie zakresu pomiarowego w górę lub w dół sygnalizowane jest pulsacją barografu.
Na rysunku nr 5 przedstawiono elementy strojenia przetwornika elektroniką analogową.
Rys. 5. Elementy strojenia przetwornika z elektroniką analogową [Endress+Hauser]
Do strojenia przetwornika z elektroniką inteligentną wymagane jest oprogramowanie
sprzętowe zależne od producenta przetwornika. Przetworniki z elektroniką PROFIBUSA
można programować lokalnie i zdalnie.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaki dzielimy przetworniki ciśnienia?
2. Jakie są sygnały standardowe przetworników ciśnienia?
3. Jaki wpływ ma sprzężenie zwrotne na dokładność przetwornika?
4. Czym ustawiamy zakres przetwornika pneumatycznego?
5. Jakie znasz przetworniki elektryczne?
6. Jakie są metody strojenia przetworników elektrycznych?
4.1.3. Ćwiczenia
Ćwiczenie 1
Przeprowadź regulację przetwornika dobierając zakres pomiarowy. Wyniki umieść
w tabeli pomiarowej. Oblicz klasę dokładności oraz błędy pomiarowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Rys. do ćwiczenia 1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć przetwornik z układem zadawania ciśnienia,
2) ustawić wartość początkową sygnału wyjściowego przetwornika,
3) ustawić zakres pomiarowy – wartość końcową,
4) przeprowadzić pomiary oraz obliczyć błędy (uchybów),
5) przeprowadzić analizę wykonanych obliczeń.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe ze źródłem ciśnienia regulowanego,
–
przetwornik pneumatyczny,
–
zestawy manometrów wzorcowych,
–
kalkulator do obliczeń,
–
karty katalogowe przetwornika.
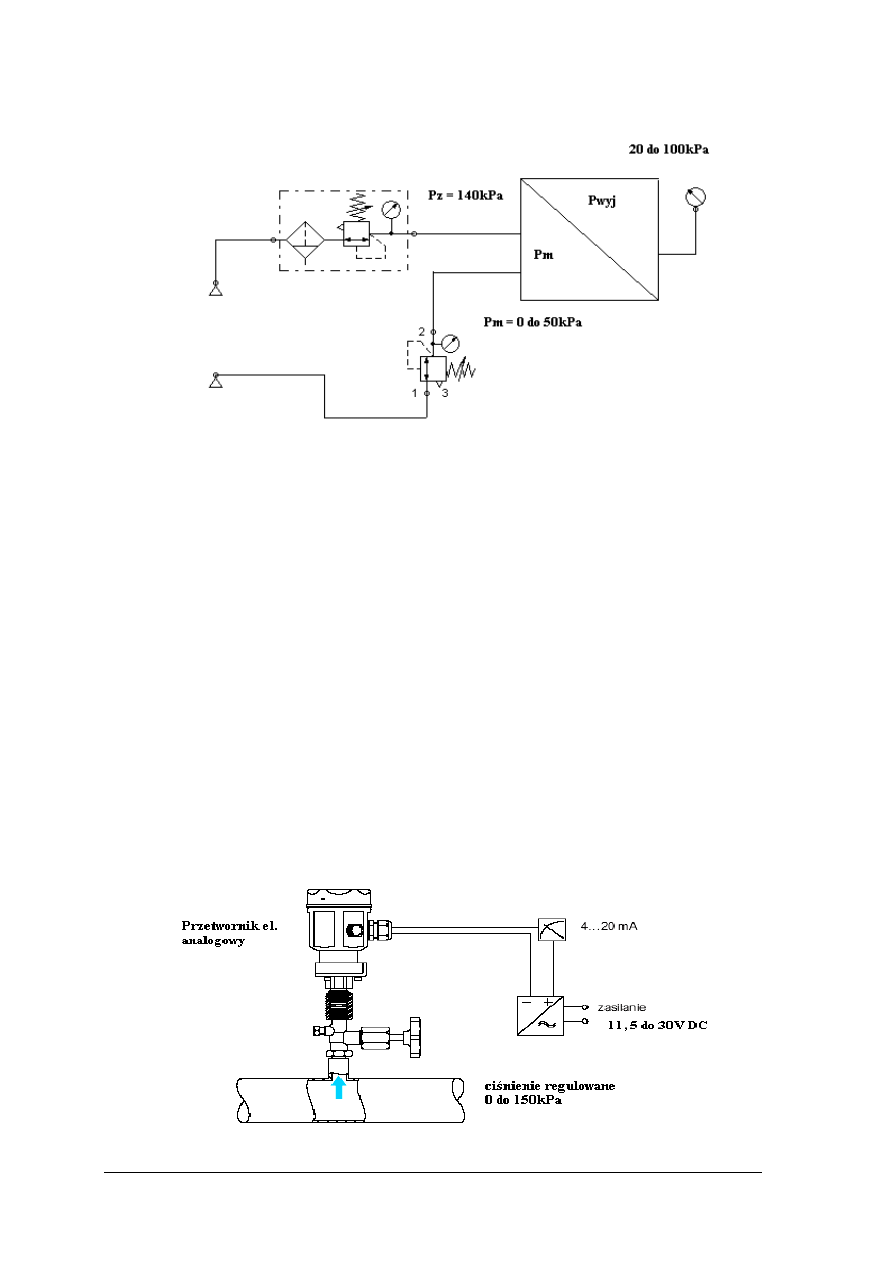
Ćwiczenie 2
Przeprowadź regulację przetwornika dla dobranego zakresu pomiarowego. Wyniki
umieść w tabeli pomiarowej. Oblicz klasę dokładności oraz błędy pomiarowe.
Rys. do ćwiczenia 2

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć przetwornik z układem zadawania ciśnienia,
2) ustawić wartość początkową sygnału wyjściowego przetwornika,
3) ustawić zakres pomiarowy – wartość końcową,
4) przeprowadzić obliczenia błędów (uchybów),
5) przeprowadzić analizę wykonanych obliczeń.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe ze źródłem ciśnienia regulowanego,
–
przetwornik pomiarowy z wyjściem 4 do 20 mA,
–
zasilacz prądu stałego,
–
manometr wzorcowy,
–
kalkulator do obliczeń,
–
karty katalogowe przetwornika.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić poziomy sygnałów standardowych?
2)
wykonać strojenie przetwornika pneumatycznego?
3)
określić klasę dokładności przetwornika?
4)
wykonać strojenie przetwornika elektrycznego?
5)
dokonać analizy błędów?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.2. Przetworniki
temperatury
4.2.1. Materiał nauczania
Przetworniki temperatury w zależności od przeznaczenia
są z pneumatycznym
lub elektrycznym sygnałem wyjściowym. W przetwornikach pneumatycznych czujnikiem
pomiarowym temperatury jest element sprężysty: rurka Bourdona lub mieszek sprężysty.
W przetwornikach elektrycznych czujnikiem pomiarowym temperatury może być rezystor
lub termoelement. Czujniki te
poznałeś w jednostce modułowej 731[01].O1.03.
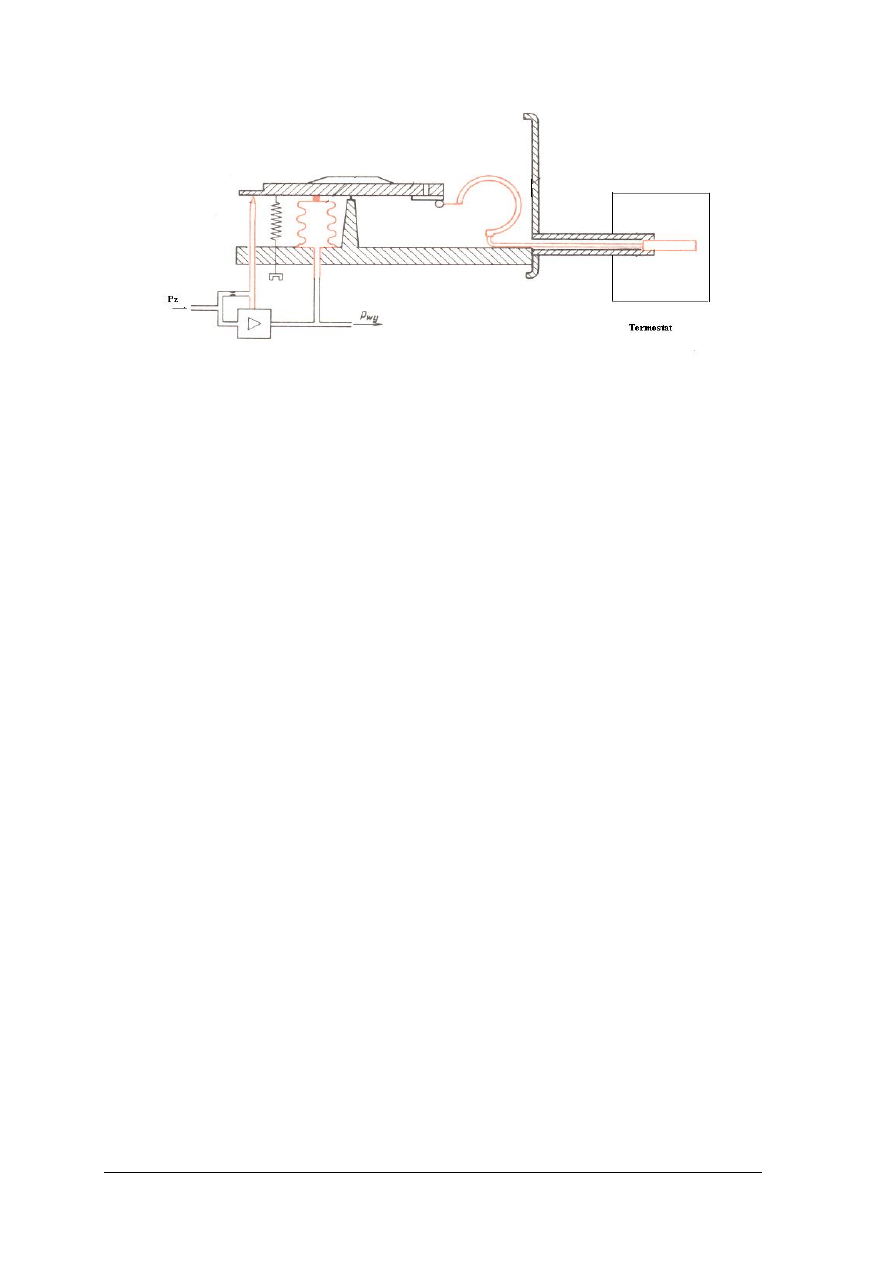
Pneumatyczny przetwornik temperatury
Czujnik tego przetwornika (rys. 6) składa się z: rurki 1, kapilary oraz rurki Bourdona 2,
całość jest wypełniona gazem. Ciśnienie gazu zmienia się pod wpływem temperatury, rurka
Bourdona 2 zamienia je
na siłę działającą na koniec dźwigni 4, podpartej po przeciwnej
stronie osi obrotu mieszkiem 6 sprzężenia zwrotnego. Mieszek sprzężenia zwrotnego,
zasilany wzmocnionym ciśnieniem kaskadowym, użyty jest do kompensacji siły będącej
miarą ciśnienia, a więc miarą temperatury gazu. Ciśnienie to jest sygnałem wyjściowym
przetwornika w standardzie 20 do 100kPa. Zakres pomiarowy tego typu przetwornika wynosi
od –75 do + 550
o
C. Regulacja
przetwornika polega na odpowiednim ustawieniu sprężyny
zerującej.
Rys. 6. Pneumatyczny przetwornik temperatury: 1 – rurka (czujnik termometru), 2 – rurka
Bourdona, 3, 4 – kaskada pneumatyczna, 5 – dźwignia, 6 – mieszek sprzężenia zwrotnego,
7 – wzmacniacz [5, s. 113]
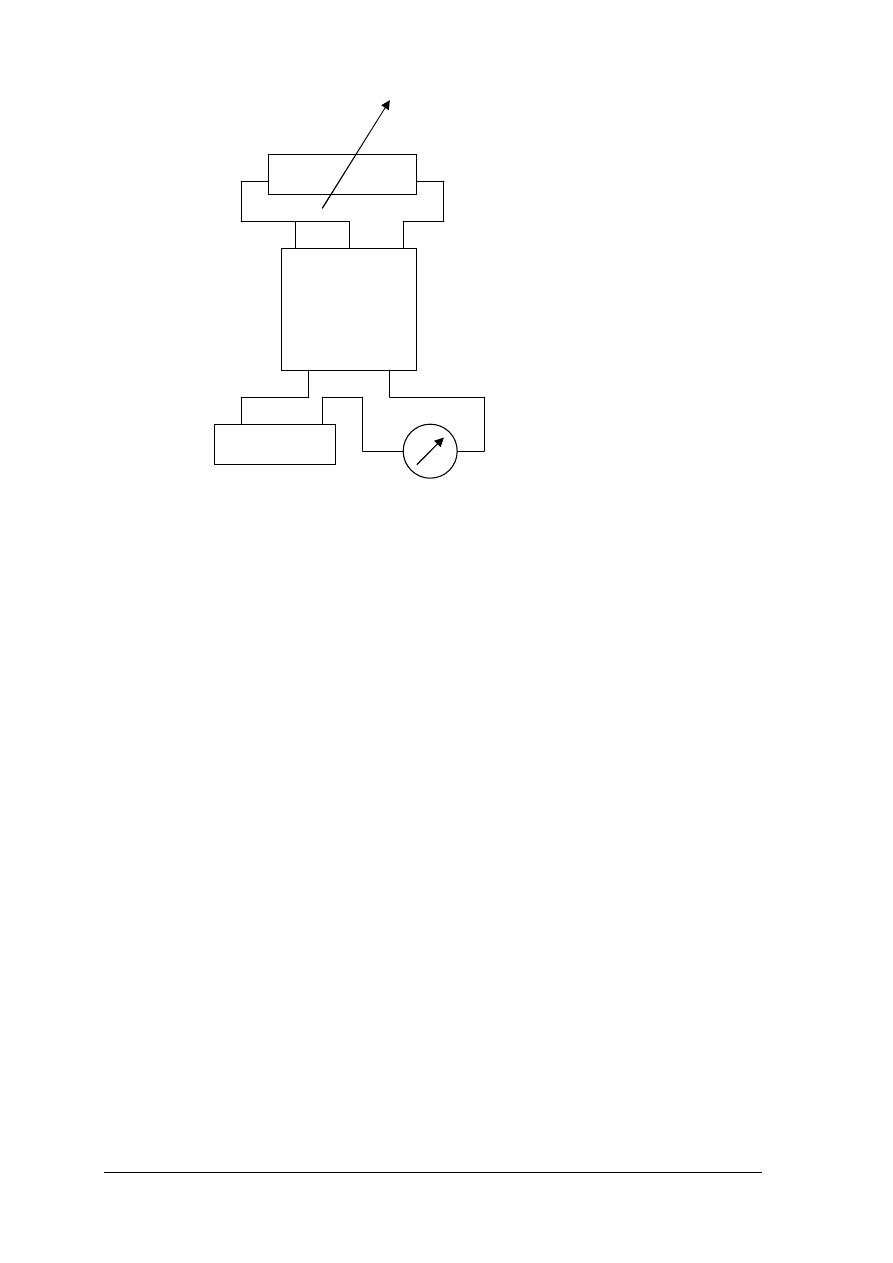
Elektryczne przetworniki temperatury
Sygnałem wejściowym w tych przetwornikach (rys. 7) jest zmiana rezystancji z czujnika
Pt100, lub z termoelementu. Przetworniki mogą być mocowane bezpośrednio w obudowie
czujnika, lub na szynie mocującej. Regulacja
tych przetworników polega na ustawieniu
potencjometrami sygnału początkowego (zerowanie) oraz sygnału
końcowego (zakresu).
Przetworniki z sygnałem wejściowym rezystancyjnym mogą być połączone linią dwu lub
trójprzewodową.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Rys. 7.
Konstrukcje przetworników temperatury: Z – potencjometr zerowania, S –
potencjometr zakresu pomiarowego [opracowanie własne]
Schematy połączeń sygnałów wejściowych linią trzyprzewodową przedstawia rys. 8.
Rys. 8. Podłączenie termometru RTD - Pt100 linią trzyprzewodową [opracowanie własne]
Przetworniki z wejściem termoelementowym umożliwiają bezpośrednie podłączenie
termoelementu do przetwornika.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak dzielimy przetworniki temperatury?
2. Z jakim czujnikiem współpracuje przetwornik pneumatyczny temperatury?
3. Jak regulujemy przetwornik pneumatyczny temperatury?
4. Czym ustawiamy zakres przetwornika elektrycznego?
5. Z jakimi czujnikami współpracuje przetwornik elektryczny?
4.2.3. Ćwiczenia
Ćwiczenie 1
Wykonaj regulację pneumatycznego przetwornika temperatury dla dobranego zakresu
pomiarowego. Wyznacz charakterystykę przetwornika,
wyniki zapisz w tabeli pomiarowej.
Oblicz klasę dokładności oraz błędy pomiarowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Rys. do ćwiczenia 1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć przetwornik z układem zasilania,
2) umieścić czujnik przetwornika w termostacie,
3) ustawić wartość początkową sygnału wyjściowego przetwornika,
4) ustawić zakres pomiarowy – wartość końcową,
5) przeprowadzić obliczenia błędów (uchybów),
6) przeprowadzić analizę wykonanych obliczeń.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe ze źródłem ciśnienia regulowanego,
–
pneumatyczny przetwornik temperatury,
–
termostat z wyposażeniem,
–
kalkulator do obliczeń,
–
karty katalogowe przetwornika.
Ćwiczenie 2
Wyznacz charakterystykę przetwornika, wyniki pomiarów umieść w tabeli. Dla
wykonanych pomiarów określ klasę dokładności oraz błędy pomiarowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Opornica dekadowa
Przetwornik
temperatury
+ –
zasilacz miliamperomierz
Rys. do ćwiczenia 2
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć przetwornik z układem zasilania,
2) podłączyć opornicę dekadową,
3) ustawić wartość początkową sygnału wyjściowego przetwornika,
4) ustawić zakres pomiarowy – wartość końcową,
5) przeprowadzić obliczenia błędów (uchybów),
6) przeprowadzić analizę wykonanych obliczeń.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z zasilaczem i opornicą dekadową,
–
tabela pomiarowa charakterystyki termometru rezystancyjnego Pt100,
–
wkrętak,
–
karty katalogowe przetwornika,
–
kalkulator do obliczeń.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
dokonać regulacji przetwornika pneumatycznego?
2)
określić zakres przetwarzania?
3)
określić klasę dokładności przetwornika?
4)
wykonać regulację przetwornika elektrycznego?
5)
przeanalizować błędy?
1 2 3
5 6
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
4.3. Przetworniki binarne
4.3.1. Materiał nauczania
Przetworniki binarne charakteryzuje dwustanowy poziom sygnału wyjściowego. Często
nazywane są
czujnikami zbliżeniowymi, gdyż ich działanie oparte jest na wykrywaniu
obiektu zbliżanego do czoła czujnika. W praktyce spotyka się
przetworniki zbliżeniowe
magnetyczne, pojemnościowe, indukcyjne, optoelektroniczne oraz ultradźwiękowe.
O wyborze rodzaju przetwornika decyduje:
–
rodzaj wykrywanego materiału,
–
szybkość przemieszczania się obiektu,
–
postać i parametry sygnału wyjściowego(rodzaj zasilania),
–
warunki środowiskowe pracy przetwornika (ciśnienie, temperatura, drgania).
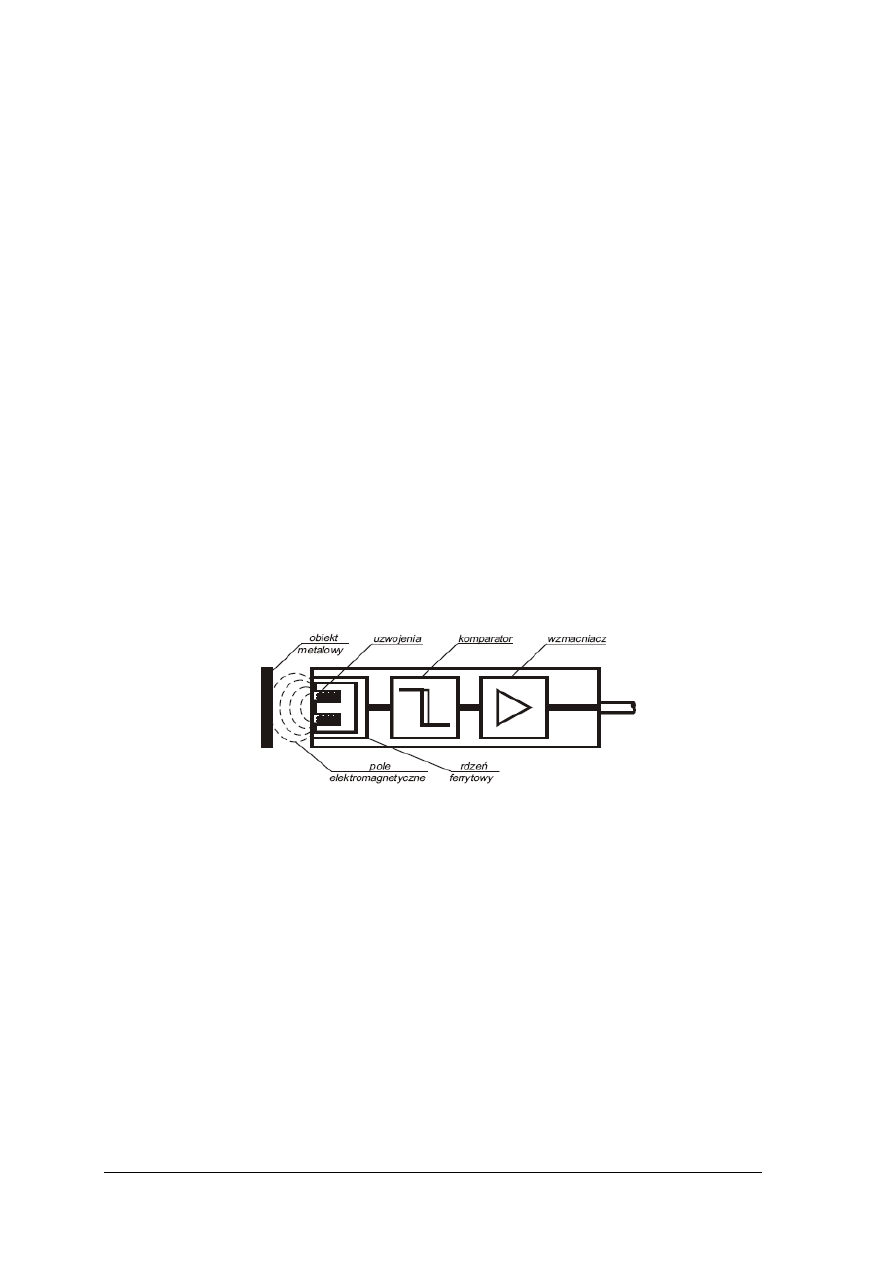
Zasada działania czujników indukcyjnych
Część aktywna czujnika (rys. 9), składająca się z cewki i ferrytowego rdzenia kubkowego
generuje w otoczeniu czoła czujnika zmienne pole elektromagnetyczne. W zbliżającym
się metalu pole to wytwarza prądy wirowe, co powoduje „obciążenie” układu oscylatora
i pogorszenie jego dobroci co
wywołuje spadek amplitudy oscylacji. Zmiany te są śledzone
przez komparator i przy pewnej, charakterystycznej dla danego typu czujnika odległości
obiektu metalowego od jego czoła następuje skokowa zmiana napięcia na wyjściu
komparatora. Sygnał ten wzmacniany jest przez układ wzmacniacza do poziomu,
umożliwiającego bezpośrednie sterowanie elementów wykonawczych podłączonych
na wyjściu czujnika.
Rys. 9. Czujnik indukcyjny zbliżeniowy – zasada pracy [opracowanie własne]
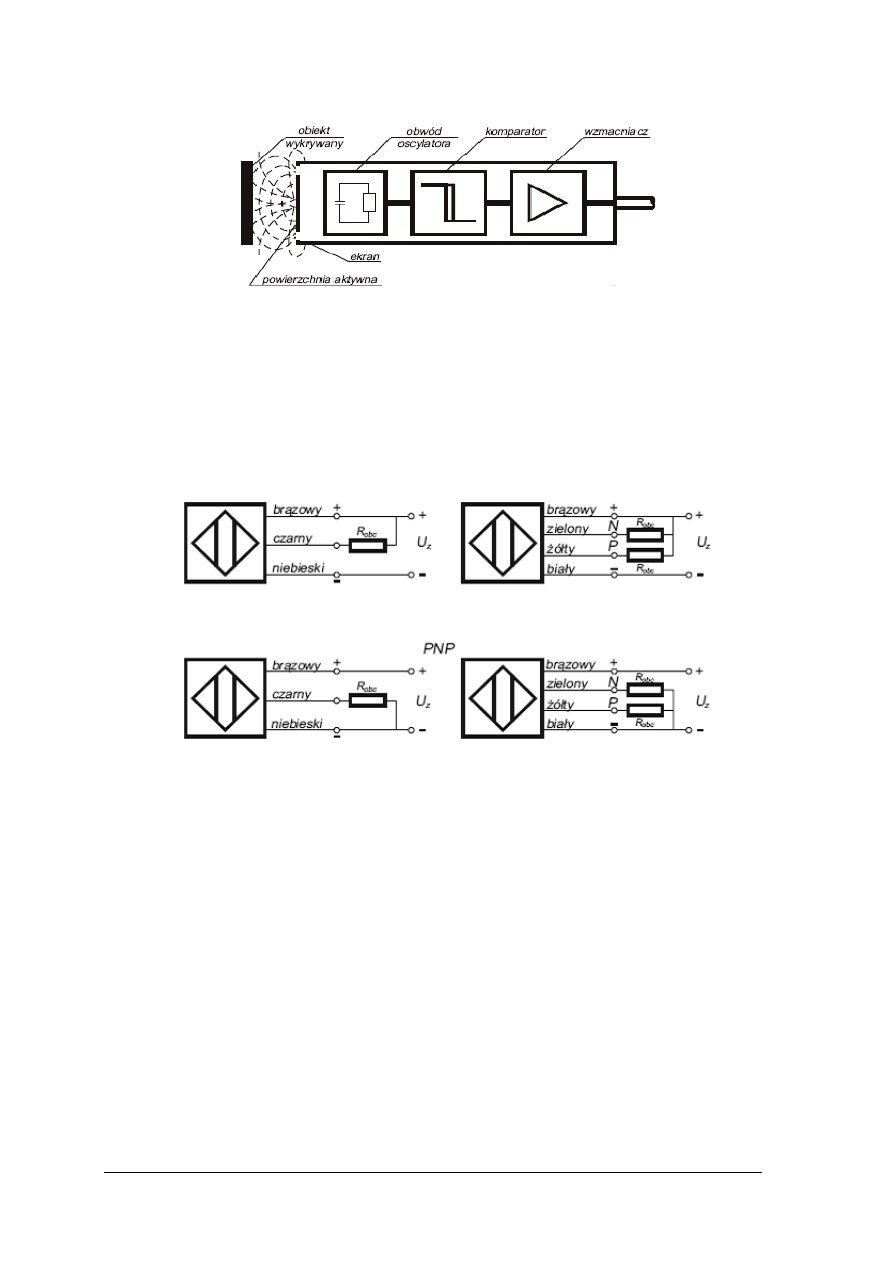
Zasada działania czujników pojemnościowych
W czujniku pojemnościowym (rys. 10) powierzchnia elektrody oraz ekran tworzą
okładziny kondensatora. Zbliżanie przedmiotu (metalowego lub dielektryka) powoduje
zmianę pojemności czujnika. Parametry układu są tak dobrane, by
oscylacja pojawia
się w wyniku wzrostu pojemności, co zostaje wykryte przez komparator. Sygnał ten
wzmacniany jest do poziomu, umożliwiającego bezpośrednie sterowanie elementów
wykonawczych podłączonych na wyjściu czujnika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Rys. 10.
Czujnik pojemnościowy [opracowanie własne]
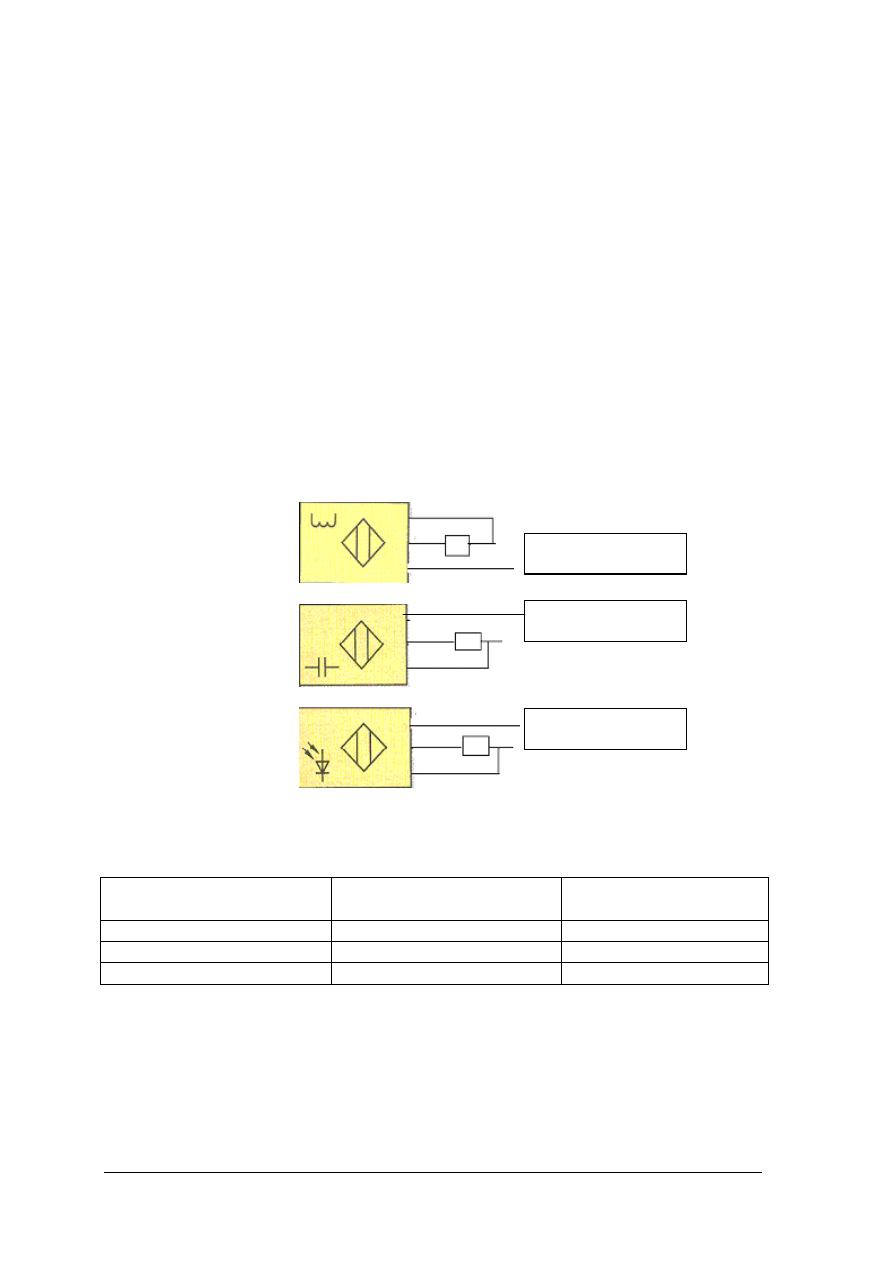
Typy wyjść czujników
Wyjścia czujników zasilanych prądem stałym wykonywane są w konfiguracji NPN lub
PNP. Każde z tych dwóch typów wyjść wykonywane jest z funkcją wyjściową N (NO,
zwierający) lub P (NC, rozwierający). Część czujników wykonywana jest z funkcją
wyjściową NP (komplementarną),wyposażoną w dwa niezależne wyjścia N i P. Sposób
połączenia tych czujników pokazano na rys. 11.
NPN
Rys. 11. Sposoby podłączeń czujników. U
z
= 24V DC [opracowanie własne]
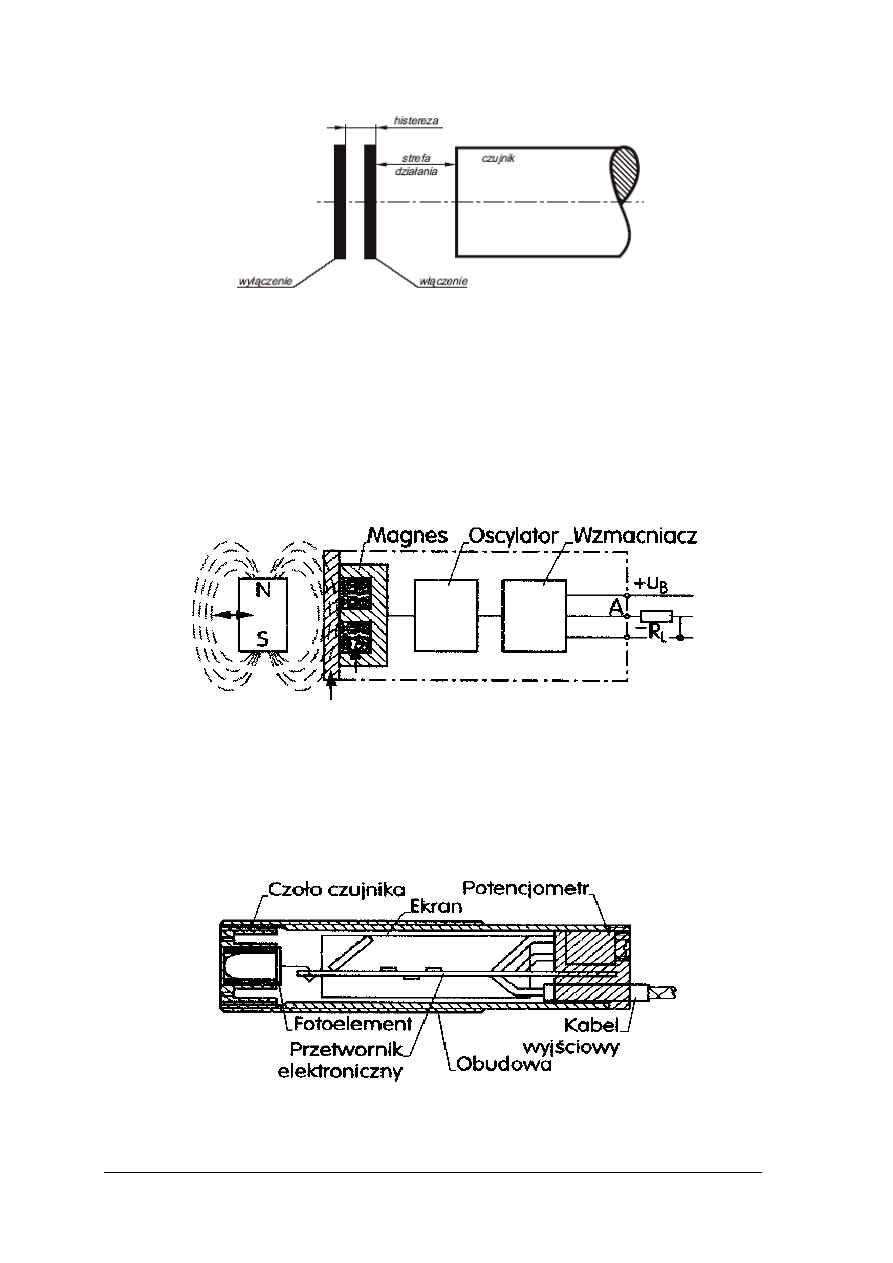
Strefa działania przetwornika (czujnika)
Strefa nominalna Sn (rys.12), strefa działania, odległość zadziałania, czułość, odległość
przełączania to maksymalna
odległość obiektu wykrywanego od czoła czujnika, przy której
następuje jego zadziałanie.
Strefa rzeczywista Sr (uwzględnia fabryczną tolerancję wykonania wyrobu) zmierzona
przy określonej temperaturze 20
o
C i napięciu zasilania 24V musi spełniać warunek: 0,9 Sn<Sr
< 1,1 Sn. Dla czujników indukcyjnych pomiar strefy w warunkach fabrycznych polega na
zbliżaniu w osi czujnika do jego powierzchni czołowej kwadratowej płytki ze stali St37
o grubości 1mm i o boku równym średnicy czujnika (dla czujników pojemnościowych strefę
wyznacza się w stosunku do powierzchni lustra wody). Strefa robocza Sw gwarantuje
działanie czujnika w pełnym zakresie temperatur i napięć zasilających oraz w funkcji czasu
eksploatacji i wynosi 0,81 Sn<Sw<1,21 Sn.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Rys. 12. Strefa załączania czujnika [opracowanie własne]
Zasada działania czujników magnetycznych
Czujniki te reagują na zmianę natężenia pola magnetycznego w swoim otoczeniu.
Zmiana ta może być wywołana obecnością magnesu stałego związanego z obiektem
lub pojawieniem się obiektu ferromagnetycznego w polu magnetycznym wytworzonym przez
magnes związany z czujnikiem. Warunkiem stosowania tych czujników jest użycie
nieferromagnetycznej przegrody pomiędzy obiektem wykrywanym, a czujnikiem. Jako
element przełączający stosuje się kontaktrony o czasie załączania 0,2 do 0,5 ms i czasie
wyłączania 20 do 50 ms. Budowę takiego czujnika przedstawiono na rysunku 13.
Rys. 13. Czujnik magnetyczny [6, s. 79]
Zasada działania czujników optoelektrycznych
Są to urządzenia elektroniczne wykorzystujące
efekt przerwania strumienia światła
pomiędzy
elementem wysyłającym światło (emitery), a elementem przetwarzające światło
na sygnał elektryczny (odbiorniki). Emiterem może być: żarówka, dioda (LED), lampa (UV).
Odbiornikiem może być: fotoogniwo, fotodioda, fototranzystor lub fotorezystor. Budowę
takiego czujnika przedstawia rys. 14.
Rys. 14. Czujnik optoelektroniczny [6, s. 79]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Każdy z tych czujników może wysterować takie elementy jak: cewkę przekaźnika, cewkę
elektrozaworu lub można go użyć jako sygnału dwustanowego do sterownika
mikroprocesorowego.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz rodzaje przetworników (czujników) zbliżeniowych?
2. Jak zasilane są czujniki zbliżeniowe?
3. Z jakiej odległości reaguje czujnik zbliżeniowy?
4. Na co reaguje czujnik pojemnościowy?
5. Z czego zbudowany jest czujnik optoelektroniczny?
4.3.3. Ćwiczenia
Ćwiczenie 1
Wyznacz odległość załączenia/wyłączenia oraz pobór prądu dla czujników indukcyjnego,
pojemnościowego i optoelektronicznego.
A
B
C
Rys. do ćwiczenia 1.
A – indukcyjny, B – pojemnościowy, C – optoelektroniczny
Tabela do ćwiczenia 1
Rodzaj czujnika
Odległość [mm]
Załączenia/wyłączenia
Pobór prądu przez czujnik
[mA]
Indukcyjny
Pojemnościowy
Optoelektroniczny
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć czujniki do układu zasilania,
2) podłączyć wyjścia czujników z cewkami przekaźników lub elektrozaworów,
3) podłączyć miliamperomierze do pomiaru poboru prądu przez czujniki,
Zasilanie 24VDC(+)
Zasilanie 24VDC(+)
Zasilanie 24VDC(+)

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
4) pomierzyć za pomocą suwmiarki odległości kiedy następuje załączenie/wyłączenie
czujnika,
5) wyniki pomiarów wpisać do tabeli pomiarowej,
6) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z regulowanym zasilaczem 24 VDC,
–
zestawy różnych czujników zbliżeniowych,
–
stanowisko do mocowania czujników,
–
miliamperomierz DC,
–
karty katalogowe czujników,
–
suwmiarka.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić rodzaje czujników zbliżeniowych?
2)
podłączyć czujnik?
3)
dobrać czujnik do rozpoznawanego materiału?
4)
wykonać sprawdzenie działania czujnika?
5)
dokonać analizy zastosowania czujnika?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
4.4.
Przetworniki cyfrowe kąta
4.4.1. Materiał nauczania
Inkrementalne optyczne sensory położenia kątowego
Inkrementalne sensory optyczne wykorzystuje się do pomiarów położenia kątowego.
Elementem pomiarowym
jest tarcza obrotowa
z naniesionymi na brzegu kreskami. Podziałka
kreskowa z dwoma rzędami działek kreskowych przesuniętych względem siebie o ¼ okresu
podziałki jest odczytywana poprzez płytkę odczytową. Jeżeli liczba kresek tarczy wynosi
na przykład 36000, to przy interpolacji 1:1024 otrzymuje się rozdzielczość 0,00001
o
. Na
rys. 15 przedstawiono cyfrowy pomiar przesunięć kątowych.
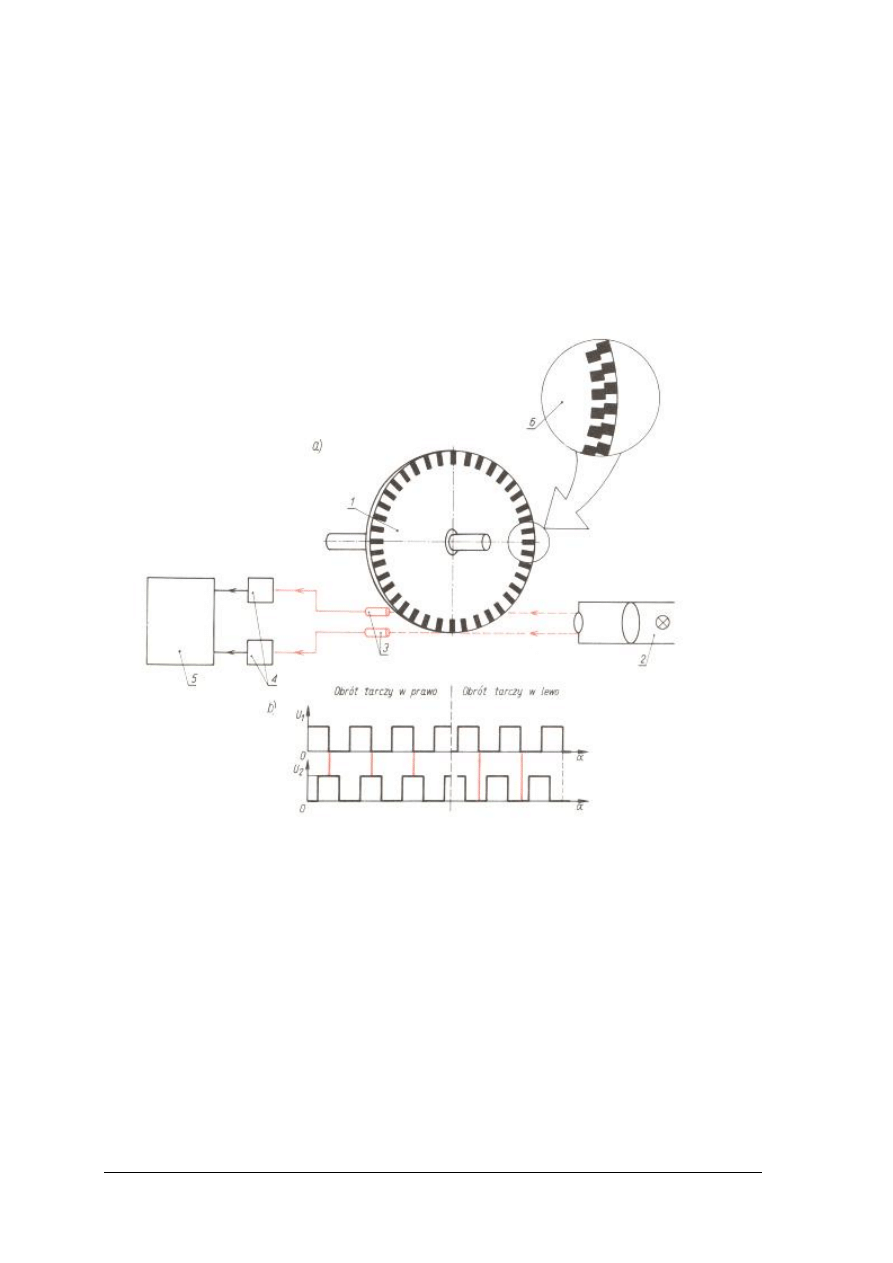
Rys. 15. Cyfrowy pomiar przesunięć kątowych: a) schemat działania układu, b) przebieg
napięć otrzymywanych z fotoelementów: 1 – tarcza pomiarowa, 2 – oświetlacz,
3 – fotoelementy, 4 – wzmacniacz, 5 – układ wykrywania kierunku obrotu i licznik,
6 – wycinek tarczy pokazany w powiększeniu [5, s. 96]
Pomiar przesunięcia uzyskuje się w wyniku zliczania impulsów, z których każdy oznacza
przejście pod elementem pojedynczej
działki. W większości zastosowań mierzone
są przesunięcia dwukierunkowe. Otrzymane impulsy mogą oznaczać przesunięcie w kierunku
uznanym za dodatni i wtedy powinny być dodawane do zawartości licznika, mogą też
oznaczać przesunięcie w kierunku przeciwnym (ujemnym) i wtedy powinny być odejmowane
od zawartości licznika. Do zliczania impulsów stosowane są liczniki rewersyjne, a impulsom
nadawany jest znak plus lub minus, zależnie od kierunku przesunięcia. Dokładność pomiaru
przesunięć kątowych zależy od dokładności naniesionych działek pomiarowych i nie może
być lepsza niż
±
¼ działki elementarnej.
Przetworniki te występują pod nazwą enkoderów inkrementalnych, a ich konstrukcje
są indywidualnym rozwiązaniem producenta. Rozwój cyfrowych urządzeń do pomiaru
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
przesunięć związany jest z wymaganiami stawianymi przez urządzenia sterowania
programowego: obrabiarki, roboty i inne.
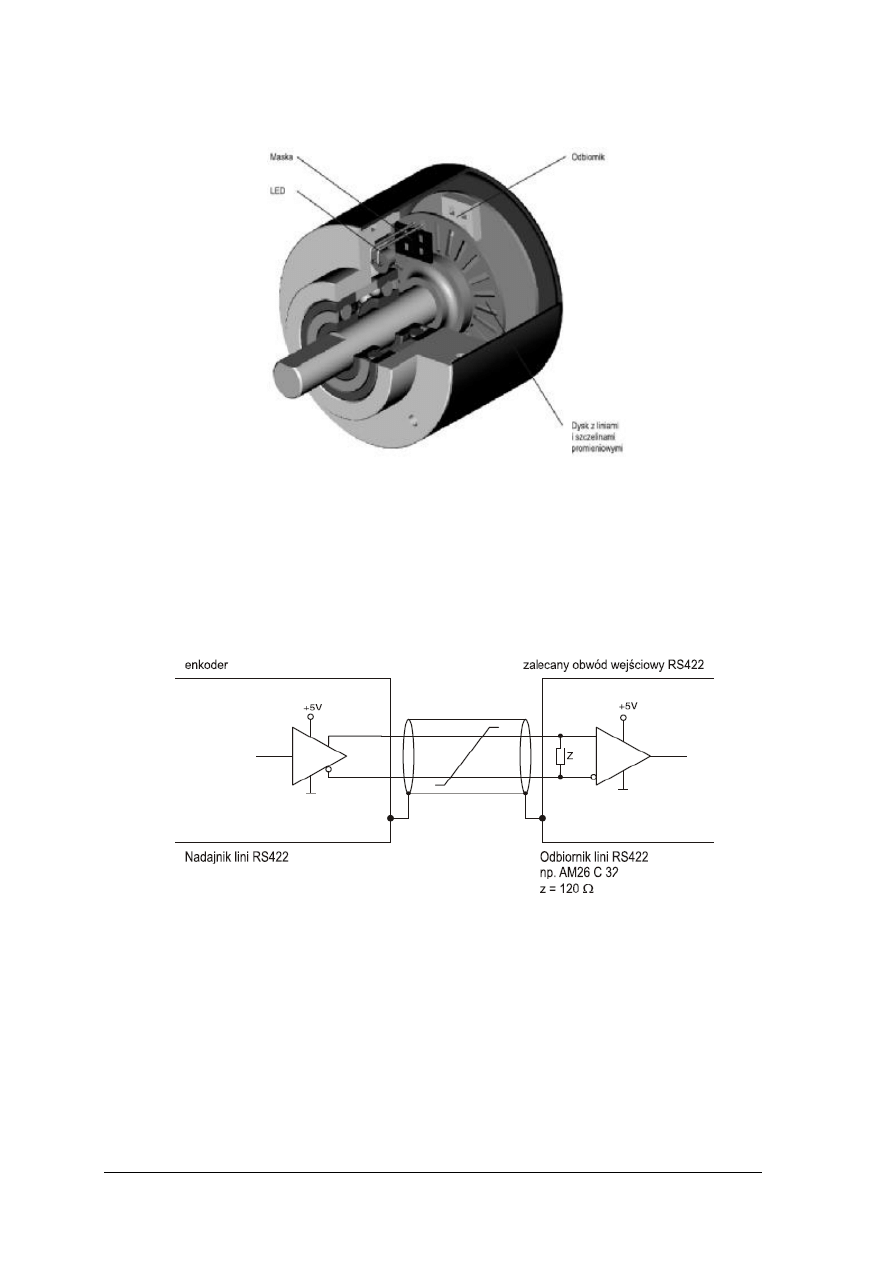
Rys. 16. Przekrój enkodera inkrementalnego [opracowanie własne]
Enkoder (rys. 16) działa na bazie skanowania modułu elektroptycznego. Dysk z równo
położonymi obok siebie promieniowymi paskami i szczelinami obraca się pomiędzy źródłem
światła (LED), a odbiornikiem, który wytwarza sygnał prostokątny
proporcjonalny
do odebranego sygnału świetlnego. Sygnał prostokątny jest przetworzony w obwodzie
elektrycznym enkodera. Impulsy z dwóch kanałów enkodera mogą być mnożone przez
2 lub przez 4 dzięki zastosowaniu specjalnych systemów wykrywania zboczy impulsów.
Do wysyłania sygnałów stosuje się układ przedstawiony na rys. 17.
Rys. 17.
Obwód wyjściowy i zalecany obwód wejściowy RS422 [opracowanie własne]
Inkrementalne, magnetyczne sensory położenia kątowego
W sensorach magnetycznych na metalicznej warstwie podłoża naniesione jest zmienne
pole magnetyczne z okresem podziałki około 0,2 mm. Do odczytu służą dwie głowice
odczytujące, przestawione o ćwierć okresu podziałki i dzięki temu wytwarzające dwa
przesunięte względem siebie w fazie sygnały sinusoidalne. Do wykrywania pól
magnetycznych wykorzystuje się czujniki Halla. Liczba inkrementów na jeden obrót zależy
od średnicy tarczy magnetycznej i może wynosić np. 2048 impulsów na obrót.
Sensory absolutnego położenia kątowego
Obrotowe tarcze kodowe stosowane w tych sensorach nazywamy koderami kątowymi,
a w połączeniu z przekładnią śrubową służą do pomiaru
absolutnych położeń kątowych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Tarcza kodowa ma naniesiony kod
– w postaci od 10 do 17 ścieżek, wzór kodu (rys. 18),
co odpowiada od 2
10
= 1024 do 2
17
= 131072 wartości kątowych na jeden obrót. Kodery
tarczowe przekazują zakodowane wartości kąta szeregowo.
Rys. 18.
Tarcza kodowa [5, s. 132]
Kodery wielotarczowe
Gdy kąty mierzone przekraczają 360
o
, a więc w zakresie więcej niż jeden obrót, jest
wymagane sprzężenie przez przekładnie redukcyjną dwie lub więcej tarcz kodowych.
Pierwsza tarcza zawiera trzy tetrady kodu BCD, a przez przekładnię redukcyjną napędzana
jest druga tarcza z następnymi dwoma tetradami. Dzięki temu jednoznacznie może być
zakodowane 100 obrotów po 1000 wartości kątowych, a więc 100 000 pozycji. Zwiększa
to bardzo znacznie rozdzielczość kodera.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka jest zasada działania inkrementalnego sensora położenia kątowego?
2. Co to jest enkoder?
3. Czym różni się sensor inkrementalny od absolutnego?
4. Gdzie stosuje się sensory cyfrowe?
5.
Czym charakteryzuje się koder wielotarczowy?
4.4.3. Ćwiczenia
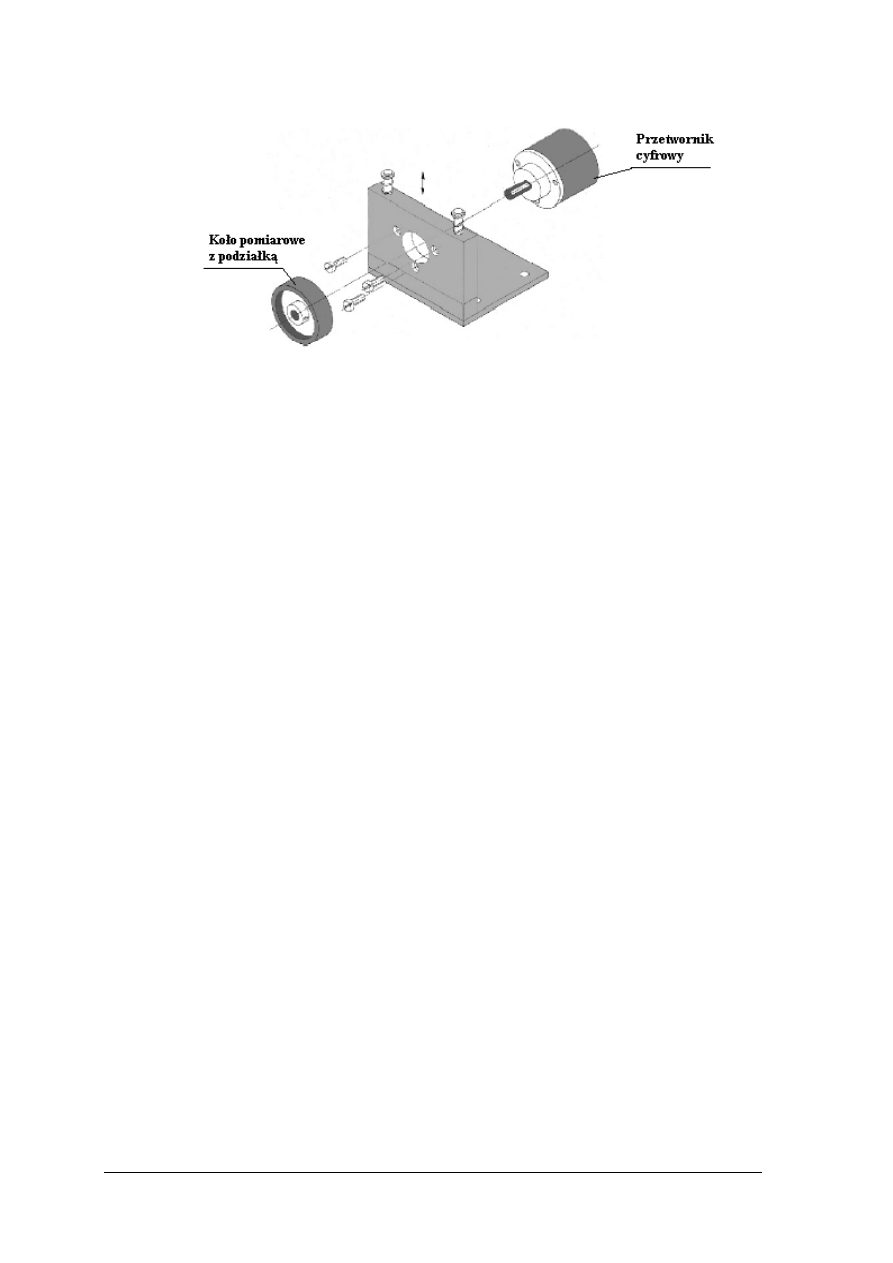
Ćwiczenie 1
Zadając zmiany położenia kątowego odczytaj z koła podziałowego wskazania
przetwornika cyfrowego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Rys. do ćwiczenia 1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć przetwornik do układu zasilania,
2) zamontować przetwornik na stanowisku,
3) podłączyć układ odczytowy,
4) pomierzyć wartości kątów z cyfrowego układu odczytowego obracając kołem o stałe
wartości kąta,
5) wyniki pomiarów wpisać do tabeli pomiarowej,
6) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe,
–
przetwornik cyfrowego pomiaru kąta,
–
układ odczytowy,
–
karty katalogowe przetwornika,
–
koło pomiarowe.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić rodzaje przetworników cyfrowych?
2)
podłączyć przetwornik cyfrowy kąta?
3)
dobrać przetwornik do pomiaru?
4)
wykonać pomiary przetwornikiem?
5)
dokonać analizy zastosowania czujnika?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
4.5. Wzmacniacze pneumatyczne i elektryczne
4.5.1. Materiał nauczania
Wzmacniacze pneumatyczne
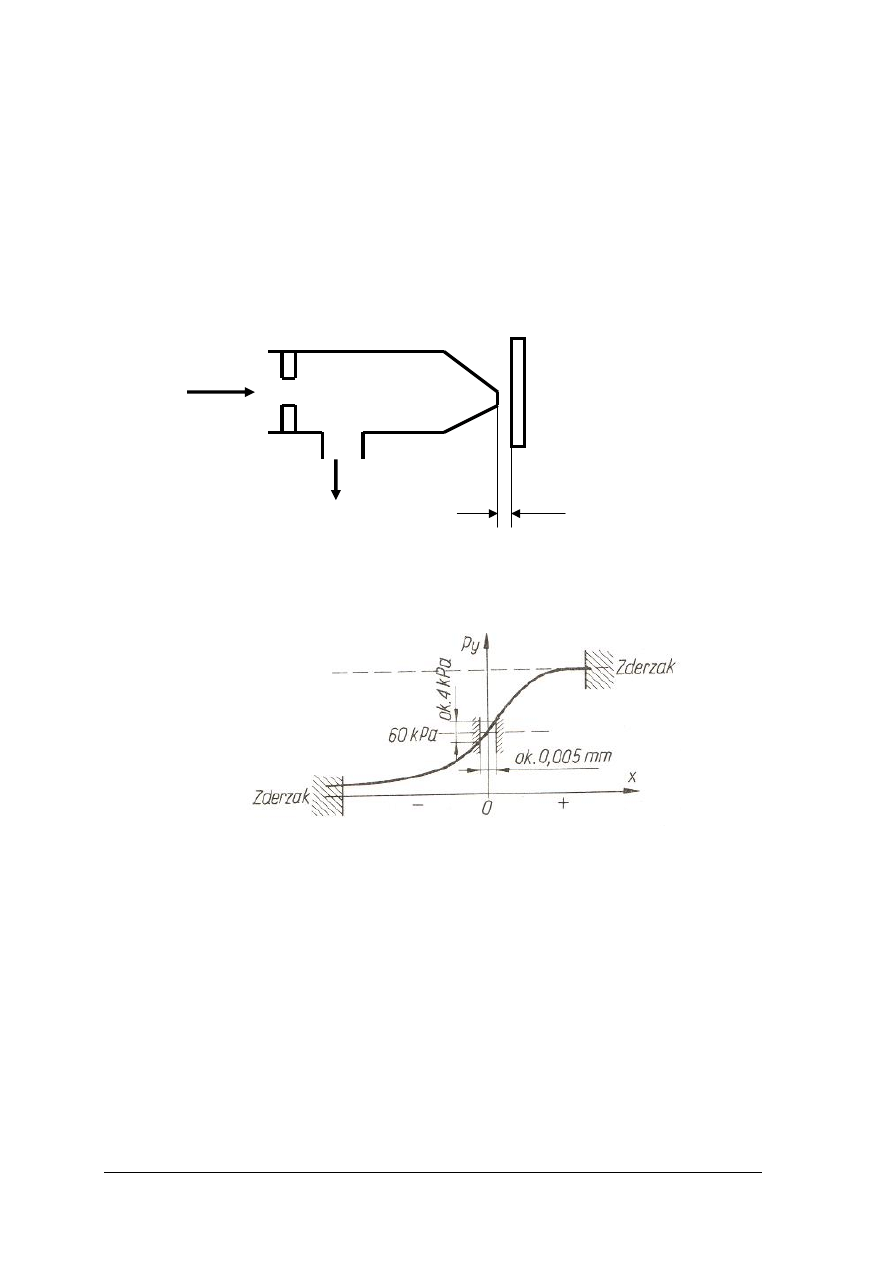
Podstawowym podzespołem każdego regulatora jest wzmacniacz. W przypadku
regulatorów pneumatycznych rozróżniamy dwa stopnie wzmocnienia. Pierwszy, nazywany
wzmacniaczem wstępnym (rys. 19) stanowi zespół typu dysza – przysłona. Wzmacniacz
wstępny ma zbyt małą moc, aby wysterować siłownik pneumatyczny i dlatego sygnał
wyjściowy z tego wzmacniacza kierowany jest do wzmacniacza mocy.
P
z
= 120kPa
x
P
y
Rys. 19.
Wzmacniacz wstępny dysza – przysłona: P
z
- ciśnienie zasilania, P
y
– ciśnienie
kaskadowe, x – odległość przysłony od dyszy [5, s. 211]
Na rysunku 20 przedstawiono charakterystykę statyczną tego wzmacniacza.
Rys. 20. Charakterystyka statyczna wzmacniacza typu dysza – przysłona [5, s. 212]
Dla uzyskania odpowiedniej dokładności i czułości dynamicznej regulatora, okazało
się celowe wykorzystanie jedynie niewielkiego odcinka x charakterystyki statycznej. Przyjęto,
że punkt pracy wzmacniacza sygnału wyjściowego powinien znajdować się w środku
charakterystyki, dla ciśnienia 60 kPa. Na rysunku 20 zaznaczono wykorzystywaną część
charakterystyki. Zastosowany wzmacniacz umożliwia uzyskanie pełnego zakresu zmian
sygnału wyjściowego przy zmianach ciśnienia wejściowego układu dysza – przysłona o około
4 kPa. Taka zmiana ciśnienia uzyskiwana jest przy zmianach położenia dźwigni o około 0,005
mm. Sygnał wyjściowy ze wzmacniacza dysza – przysłona kierowany jest do wzmacniacza
mocy (rys. 21).
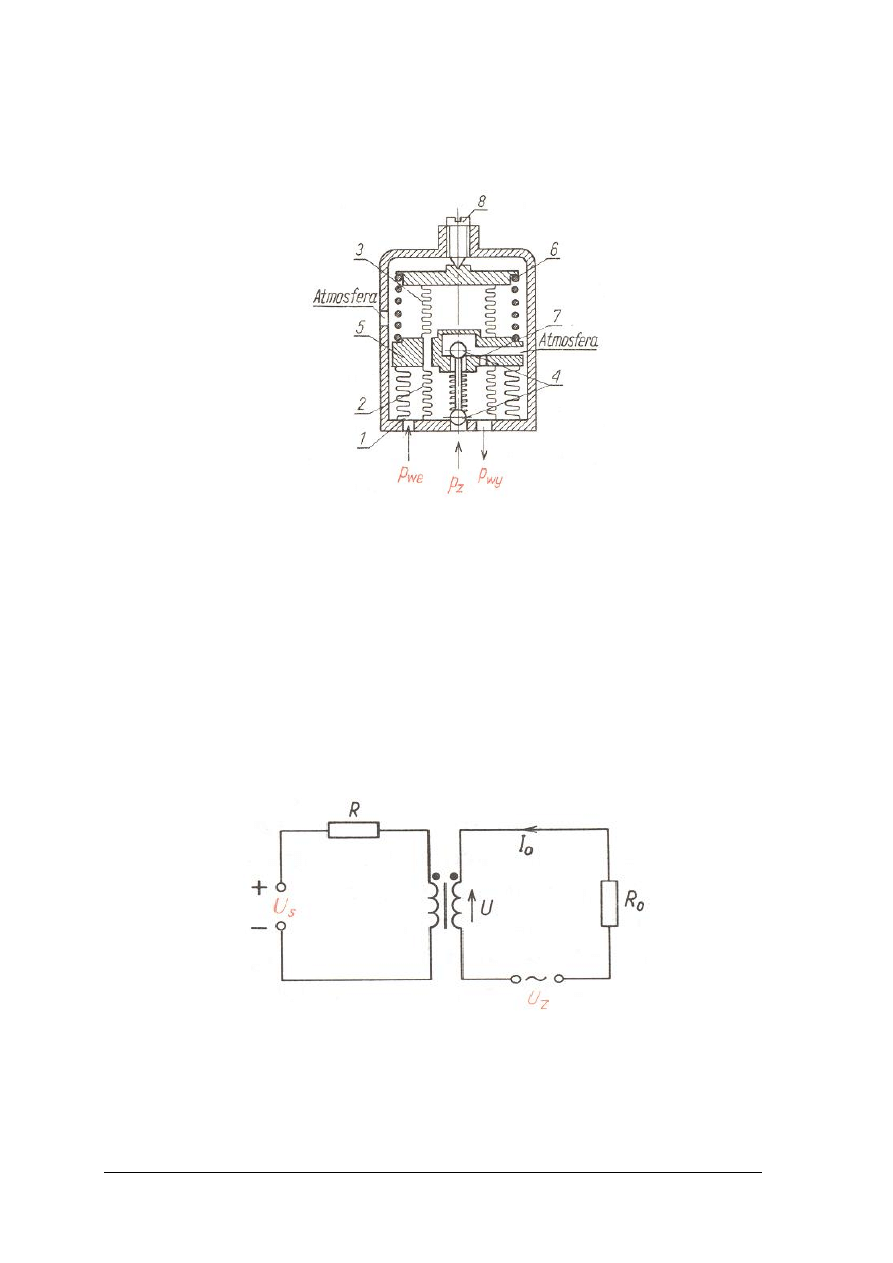
Punkt pracy wzmacniacza, czyli wartość ciśnienia odniesienia, wyznaczony jest
naciągiem sprężyny 6. Wydajność maksymalna wzmacniacza wynosi 50 l/min i jest osiągana
przy znacznym przesterowaniu (to jest przy zmianie ciśnienia wejściowego). Dla tego
wzmacniacza obowiązuje wzór:
P
wy
= K P
we
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
przy czym K jest wzmocnieniem, liczbowo równym stosunkowi powierzchni czynnej mieszka
1 do różnicy powierzchni czynnych mieszków 2 i 3. Dla tego wzmacniacza K= 20. Oznacza
to, że pełne wysterowanie następuje przy zmianach ciśnienia wejściowego w granicach
0–4 kPa.
Rys. 21. Schemat budowy mieszkowego wzmacniacza mocy: 1 – mieszek wejściowy,
2, 3 – mieszki wyjściowe, 4 – podwójny zawór kulowy, 5 – płytka ruchoma,
6 – sprężyna, 7 – otwór kapilarny, 8 – śruba regulacyjna [5, s. 224]
Wzmacniacze elektryczne
W układach automatyki do sterowania serwomechanizmami stosowane są zasadniczo
cztery typy wzmacniaczy: tyrystorowe, magnetyczne, tranzystorowe i elektromaszynowe.
Wzmacniacze magnetyczne (rys.22) wykorzystują nieliniowe zależności między indukcją
B, a natężeniem H pola magnetycznego w rdzeniu ferromagnetycznym. Dzięki tej
nieliniowości można oddziaływać na chwilową wartość mocy wydzielanej w obciążeniu
oraz mocy pobieranej ze źródła prądu przemiennego. Oddziaływanie to polega na
regulowaniu stałoprądowym sygnałem sterującym punktu wejścia w nasycenie rdzenia, na
którym nawinięte jest uzwojenie włączone w obwód prądu przemiennego. Najprościej można
powiedzieć, że wzmaciacz stanowi dławik nasycony, włączony w szereg ze źródłem napięcia
przemiennego.
Rys. 22
.
Schemat wzmacniacza magnetycznego: U
s
– napięcie sterujące, U
z
– napęcie
zasilające [5, s. 293]
Podstawową wadą tych wzmacniaczy jest duży ciężar i wymiary oraz wysoka cena.
Został on wyparty przez inne typy wzmacniaczy.
Wzmacniacze elektromaszynowe są to obcowzbudne prądnice prądu stałego, w których
dzięki odpowiedniej konstrukcji i sprzężeniom zwrotnym uzyskano silną zależność między
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
prądem wzbudzenia (sterującym)
,
a napięciem wyjściowym. Wadą tych wzmacniaczy jest
duży hałas, duże wymiary i obecność części ruchomych. Zostały one wyparte przez
wzmacniacze tyrystorowe.
Wzmacniacze tranzystorowe stanowią najbardziej rozpowszechnioną grupę wzmacniaczy
prądu stałego małej i średniej mocy. Ich zaletą jest łatwość uzyskiwania dużego wzmocnienia,
małe stałe czasowe, małe wymiary, duża sprawność oraz łatwość formowania pożądanej
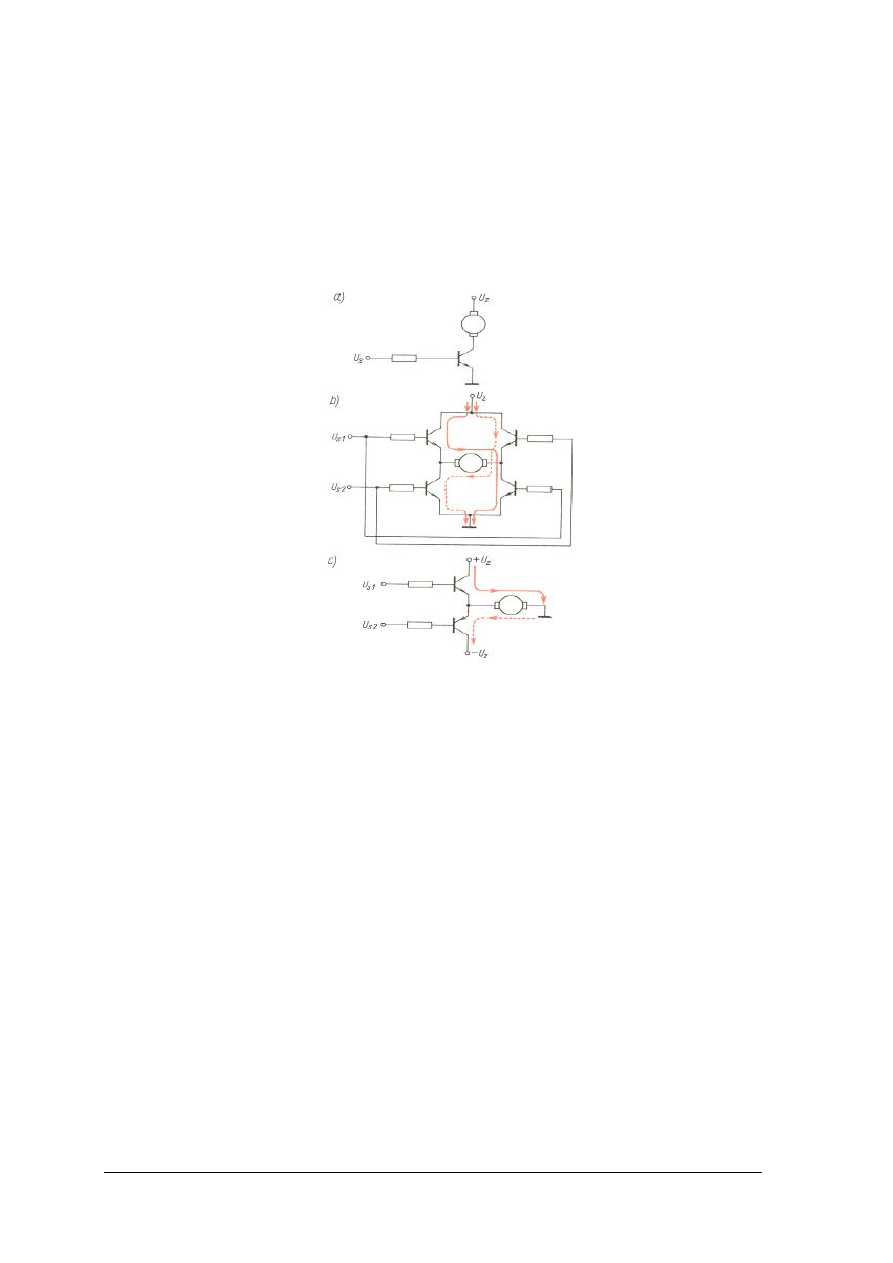
charakterystyki. Stosowane są dwa typy układów wzmacniaczy: liniowe i kluczowane. Na
rys. 23 przedstawiono trzy warianty tranzystorowego wzmacniacza mocy
steruących
silnikiem prądu stałego.
Rys. 23.
Trzy warianty końcowego stopnia tranzystorowego wzmacniacza mocy:
a) jednokierunkowe sterowanie prędkością, b) układ typu H mostkowy
sterowania nawrotnego z jednym zasilaniem, c) układ typu T sterowania
nawrotnego (z zastosowaniem dwóch zasilaczy) [5, s. 295]
Wzmacniacze tyrystorowe
Tyrystory są elementami elektronicznymi przeznaczonymi do pracy w charakterze kluczy
jednokierunkowych (co było zawarte w jednostce 731[01].01.04). Zmieniając kąt zapłonu
tyrystora można regulować wartość średnią prądu, a więc wartość średnią momentu
napędowego silnika. Bardzo rzadko są stosowane układy jednofazowe, z powodu dużych
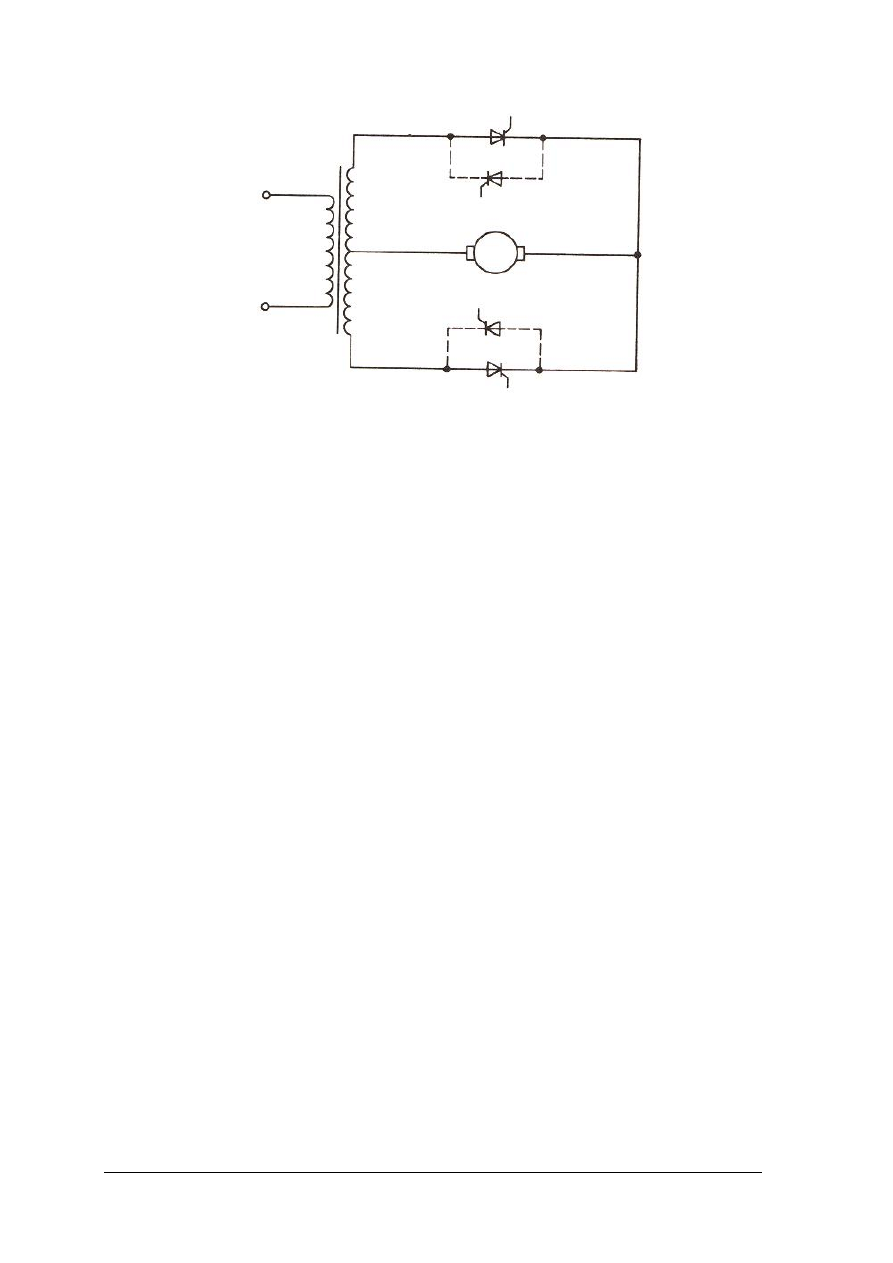
tętnień prądu wirnika. Do sterowania dużymi mocami stosowane są układy trójfazowe. Na
rysunku 24 przedstawiono schemat ideowy układu sterowania silnikiem dwufazowym.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Rys. 24.
Tyrystorowy układ dwufazowy sterowania silnikiem [5, s. 300]
Falowniki (przemienniki częstotliwości)
Jednym z głównych zastosowań tyrystorów oraz tranzystorów w układach sterowań
silnikami są falowniki zwane przemiennikami częstotliwości. W falownikach przechodzenie
tyrystorów ze stanu przewodzenia do stanu blokowania może nastąpić tylko przy
wymuszonym wytworzeniu na nich napięcia ujemnego. Proces ten nazywa się komutacją
wymuszoną. Praca falownika polega na cyklicznym przyłączaniu odbiornika do źródła
napięcia stałego, przy czym poszczególne tyrystory, spełniające rolę łączników, pracują
w trzech stanach: przewodzenia, blokowania i zaworowym. Napięcie przemienne na wyjściu
falownika o regulowanej częstotliwości uzyskuje się przez zmianę czasu pracy tyrystorów
w stanie przewodzenia. Falowniki realizują takie funkcje jak regulacja prędkości obrotowej,
czasu i rodzaju przyśpieszenia oraz hamowania, posiadają szereg wejść sterujących
umożliwiajacych pracę silnika w złożonych układach automatyki. Falowniki mogą być
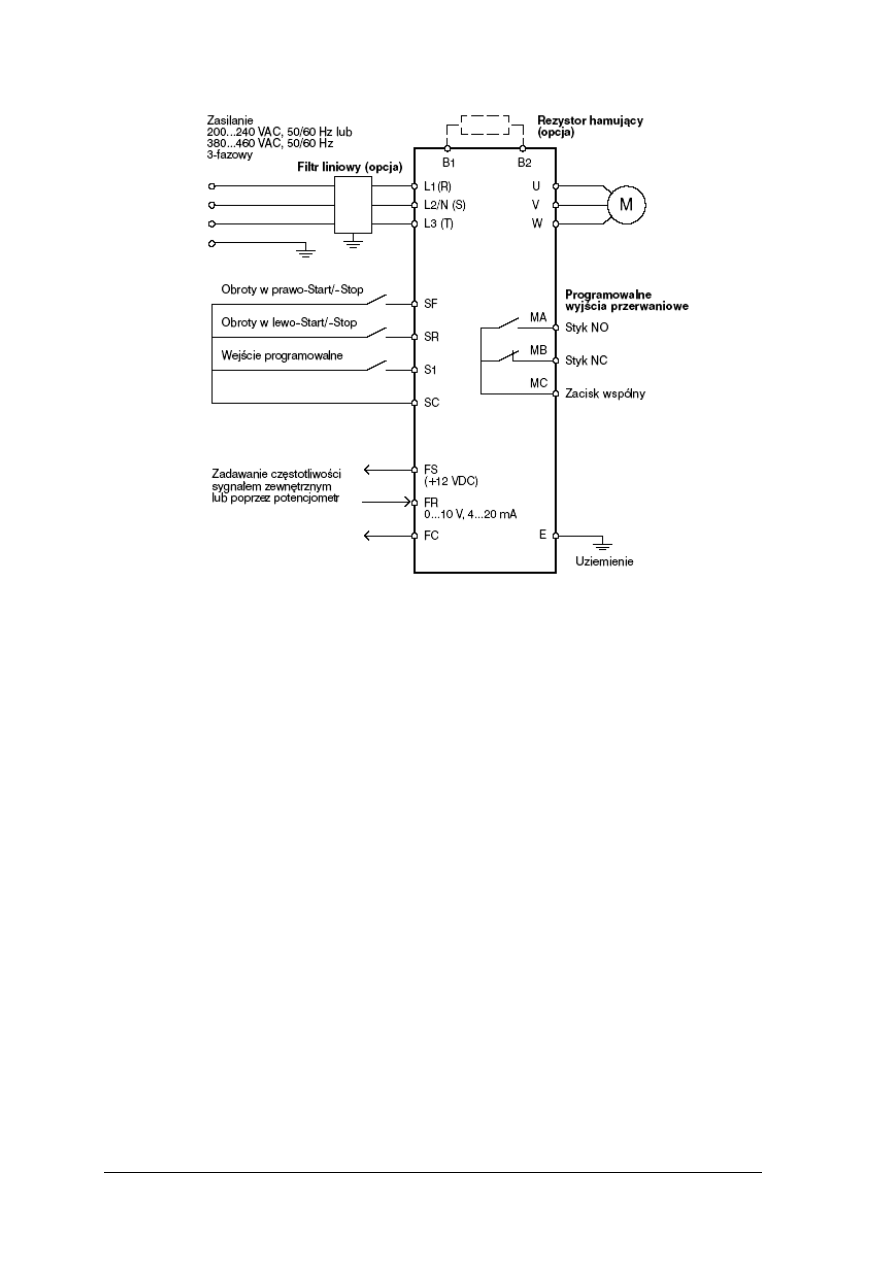
zasilane napięciem jedno lub trójfazowym. Na rys. 25 przedstawiono sposób podłączenia
falownika do silnika indukcyjnego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. 25.
Podłączenie
falownika
produkcji
[OMRON]
do
silnika
indukcyjnego. Dla zasilania jednofazowego zacisk L3 pozostaje
wolny
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Na jakiej zasadzie działa wzmacniacz typu dysza – przysłona?
2. Do czego służy pneumatyczny wzmacniacz mocy?
3. Jakie znasz wzmacniacze elektryczne?
4. Dlaczego nie stosuje się wzmacniaczy magnetycznych i elektromaszynowych?
5. Jakie znasz wzmacniacze tranzystorowe?
6. Kiedy stosuje się wzmacniacze tyrystorowe?
7. Jakie zadanie spełnia falownik?
4.5.3. Ćwiczenia
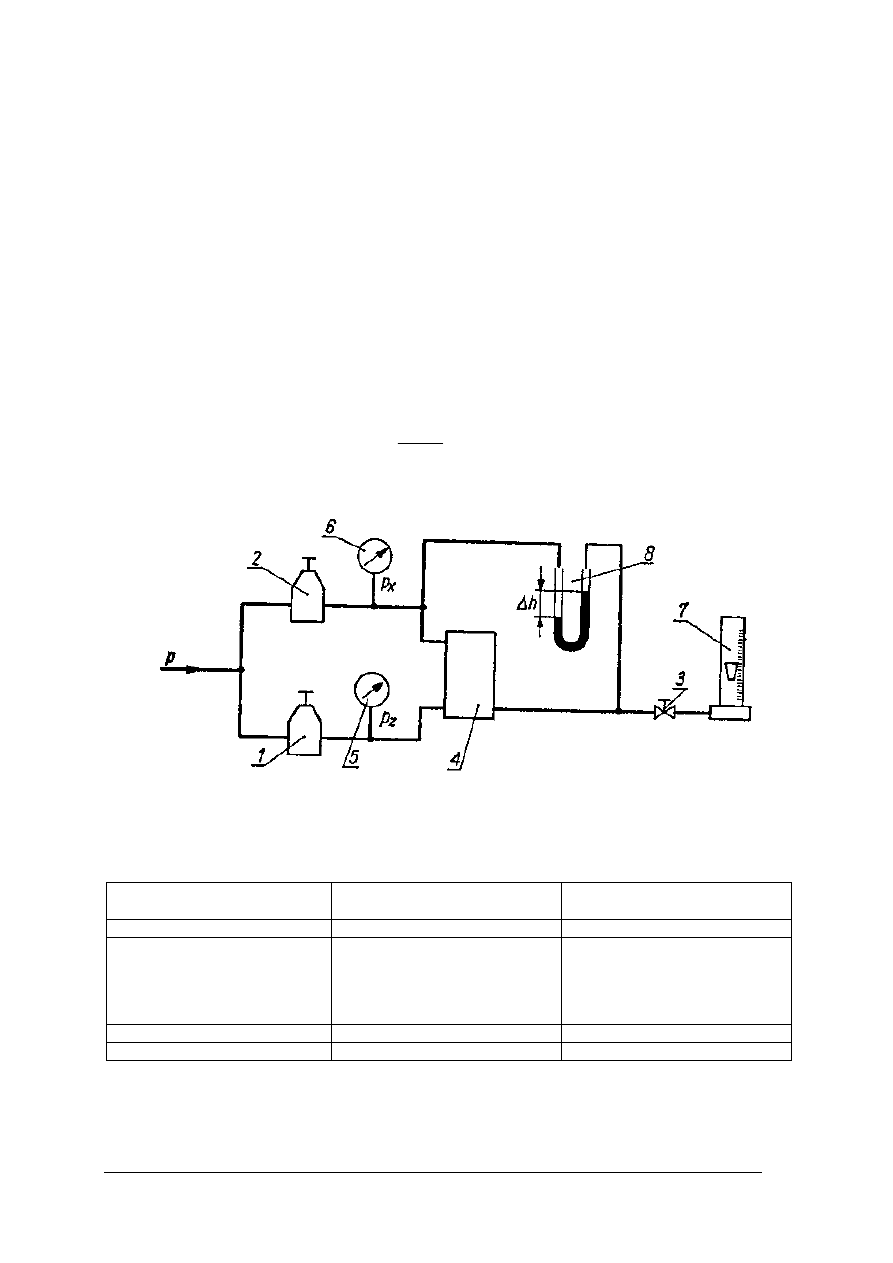
Ćwiczenie 1
Wyznacz charakterystykę wzmacniacza kaskadowego – zależność ciśnienia wyjściowego
w funkcji odległości przysłony od dyszy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Rys. 1.
do ćwiczenia 1. Schemat stanowiska pomiarowego:1 – stabilizator ciśnienia,
2 – manometr zakres do 0,1 MPa, 3 – opór stały (wymienny), 4 – manometr zakres
do 0,1 MPa, 5 – dysza z wymiennymi końcówkami, 6 – pokrętło
Rys. 2.
do ćwiczenia 1. Przekrój stanowiska do badania wzmacniacza dysza – przysłona:
1 – dysza wymienna, 2 – korpus, 3 – opór stały, 4 – głębokościomierz mikrometryczny,
5 – wkręty, 6 – końcówka podłączenia ciśnienia, 7 – końcówka wyjściowa, 8 – komora
kaskadowa
Tabela do ćwiczenia 1
Średnica oporu stałego
Średnica dyszy
Odległość przysłony od
dyszy
P
k
mm
mm
mm
MPa
1
1
0,10
0,15
0,20
...
0,40
0,5
0,5
...
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć stanowisko zgodnie ze schematem,
2) podłączyć i wyregulować ciśnienie zasilania na 120kPa,
3) podłączyć manometr odczytowy,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
4) pomierzyć wartości ciśnień kaskadowych dla różnych dysz,
5) wyniki pomiarów wpisać do tabeli pomiarowej,
6) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe,
–
źródło ciśnienia zasilania,
–
zestaw manometrów kl.0,5 zakres do 0,1 MPa,
–
zestawy dysz i oporów wymiennych,
–
karty katalogowe wzmacniacza.
Ćwiczenie 2
Połącz układ do badania wzmacniacza mocy zgodnie ze schematem. Wkrętem zerującym
wzmacniacza ustaw
∆
p = 0.Wyznacz charakterystykę wzmacniacza, a wyniki wpisz do
załączonej tabeli. Określ klasę wzmacniacza według wzoru:
100%
p
Δp
max
max
⋅
gdzie:
∆
p
max
– spadek ciśnienia
∆
p przy ciśnieniu wejściowym p = p
max.
Rys.
do ćwiczenia 2. 1 – stabilizator ciśnienia Q = 200 l / h, 2 – stabilizator ciśnienia o małym
strumieniu objętości, 3 – zawór, 4 – badany wzmacniacz mocy, 5 – manometr 0,15 MPa,
6 – manometr 0,1 MPa, 7 – rotametr laboratoryjny do 200 l/h, 8 – manometr
hydrostatyczny
Tabela do ćwiczenia 2
Strumień objętości
Q
Ciśnienie wejściowe
p
x
Spadek ciśnienia
∆
p
l / h
MPa
MPa
0
50
100
150
200
0,02
...
0,06
...
0,1
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć stanowisko zgodnie ze schematem,
2) stabilizatorem 1 wyregulować ciśnienie zasilania na wartość 140 kPa,
3) stabilizatorem 2 ustawić ciśnienie p
x
= 0,02 MPa,
4) podłączyć manometr odczytowy 8,
5) wkrętem zerującym ustawić
∆
p = 0,
6) otwierając zawór 3 ustawić wartości strumienia objętości według tabeli i odczytywać
∆
p,
7) wyniki pomiarów wpisać do tabeli pomiarowej,
8) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe,
–
źródło ciśnienia zasilania,
–
zestawy manometrów kl. 0,5 zakres do 0,1 MPa,
–
stabilizatory ciśnienia,
–
rotametr,
–
manometr hydrostatyczny,
–
karty katalogowe wzmacniacza.
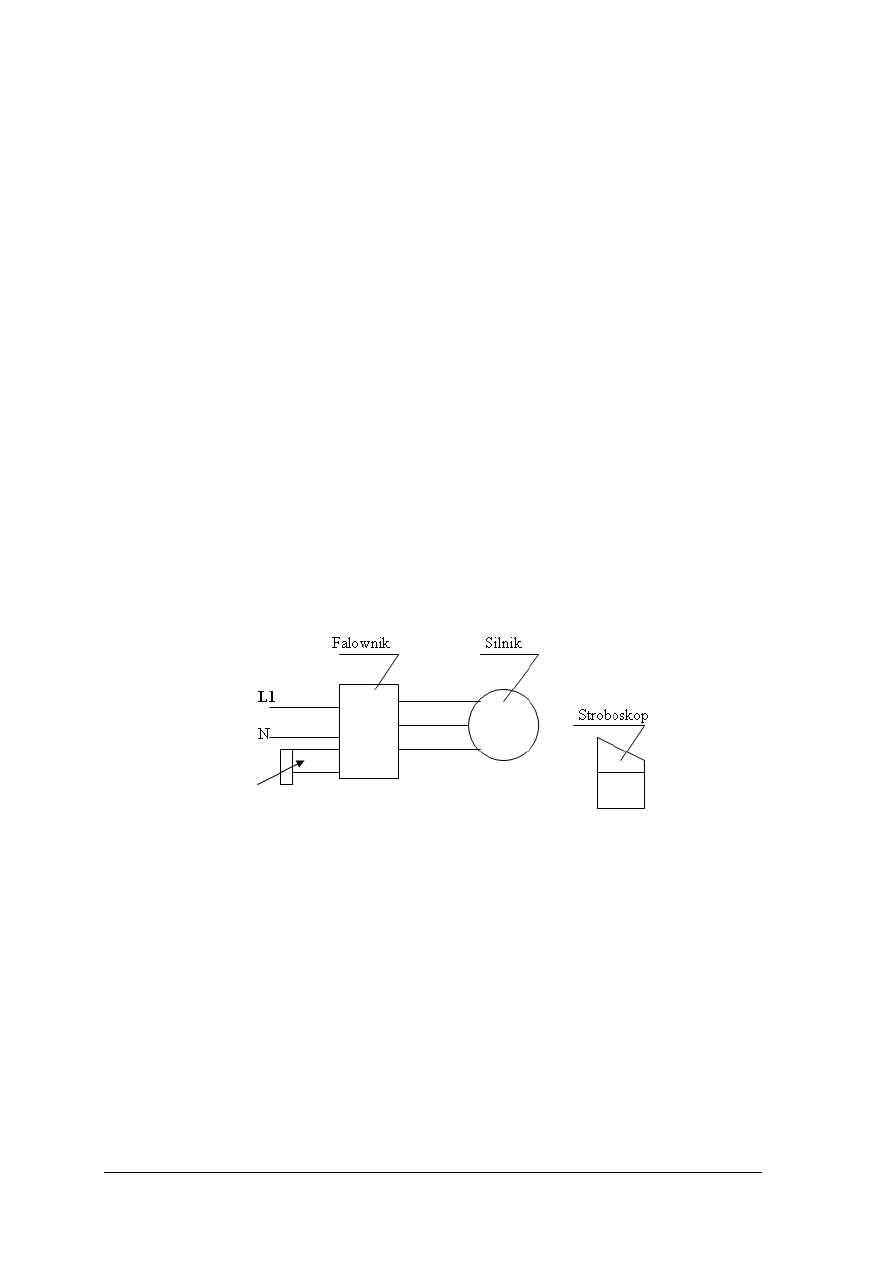
Ćwiczenie 3
Podłącz falownik do silnika indukcyjnego zgodnie ze schematem fabrycznym falownika,
regulując częstotliwość falownika wyznacz charakterystykę układu sterownia. Do pomiaru
prędkości obrotów silnika użyj stroboskopu. Wyniki umieść w tabeli pomiarowej.
Rys. do ćwiczenia 3
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć falownik zgodnie ze schematem,
2) podłączyć silnik trójfazowy 0,25 kW do falownika,
3) podłączyć potencjometr lub źródło częstotliwości do regulacji obrotów silnika,
4) zadawać różne prędkości silnika,
5) pomierzyć prędkość silnika stroboskopem,
6) wyniki pomiarów wpisać do tabeli pomiarowej,
7) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z falownikiem,
–
silnik trójfazowy o mocy 0,25 kW,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
–
karty katalogowe,
–
stroboskop.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić rodzaje wzmacniaczy pneumatycznych?
2)
dobrać zakres wzmacniacza pneumatycznego mocy?
3)
opisać rodzaje wzmacniaczy elektrycznych?
4)
scharakteryzować zastosowanie falownika?
5)
uruchomić falownik z silnikiem?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.6. Regulatory bezpośredniego działania
4.6.1. Materiał nauczania
Regulatory bezpośredniego działania
Są to regulatory pracujące bez energii pomocniczej. W regulatorach tego typu czujnik,
nastawnik i urządzenie napędowe stanowią całość. Rozróżniamy następujące rodzaje tych
regulatorów:
–
ciśnienia,
–
temperatury,
–
poziomu,
–
przepływu.
Regulatory ciśnienia bezpośredniego działania
Stosowane są do utrzymywania stałej wartości ciśnienia gazów lub cieczy. Ciśnienie
może być regulowane przed lub za zaworem nastawczym. Konstrukcja regulatora jest oparta
na elemencie membranowym, który łączy w sobie funkcje członu pomiarowego i siłownika.
Ciśnienie regulowane doprowadzone pod membranę 2 – wytwarza siłę działającą do góry.
Siła pochodząca od sprężyny 3 skierowana jest przeciwnie. Grzybek zaworu ustala
się w położeniu, w którym obie siły się równoważą. Zmieniając naciąg sprężyny 3 zmieniamy
wartość zadaną ciśnienia. Na rysunku 26 przedstawiono schemat regulatora ciśnienia
pobierającego sygnał mierzony
za zaworem.
Rys. 26.
Schemat działania regulatora ciśnieniowego: 1 – grzybek zaworu
dwugniazdowego, 2 – membrana regulatora, 3 – sprężyna nastawnika
wartości zadanej [5, s. 185]
Regulator ten jest regulatorem proporcjonalnym (typu P). Zakres proporcjonalności
ma wartość stałą, równą 10%. W tej grupie regulatorów występują również regulatory,
w których zamiast sprężyny zastosowano ciężarek zapewniający ruch powrotny grzybka
zaworu. Regulator tego typu ma charakterystykę typu I (całkującą). Wartość zadana określona
jest wartością ciężarka zawieszonego na dźwigni. W urządzeniach chłodniczych stosuje
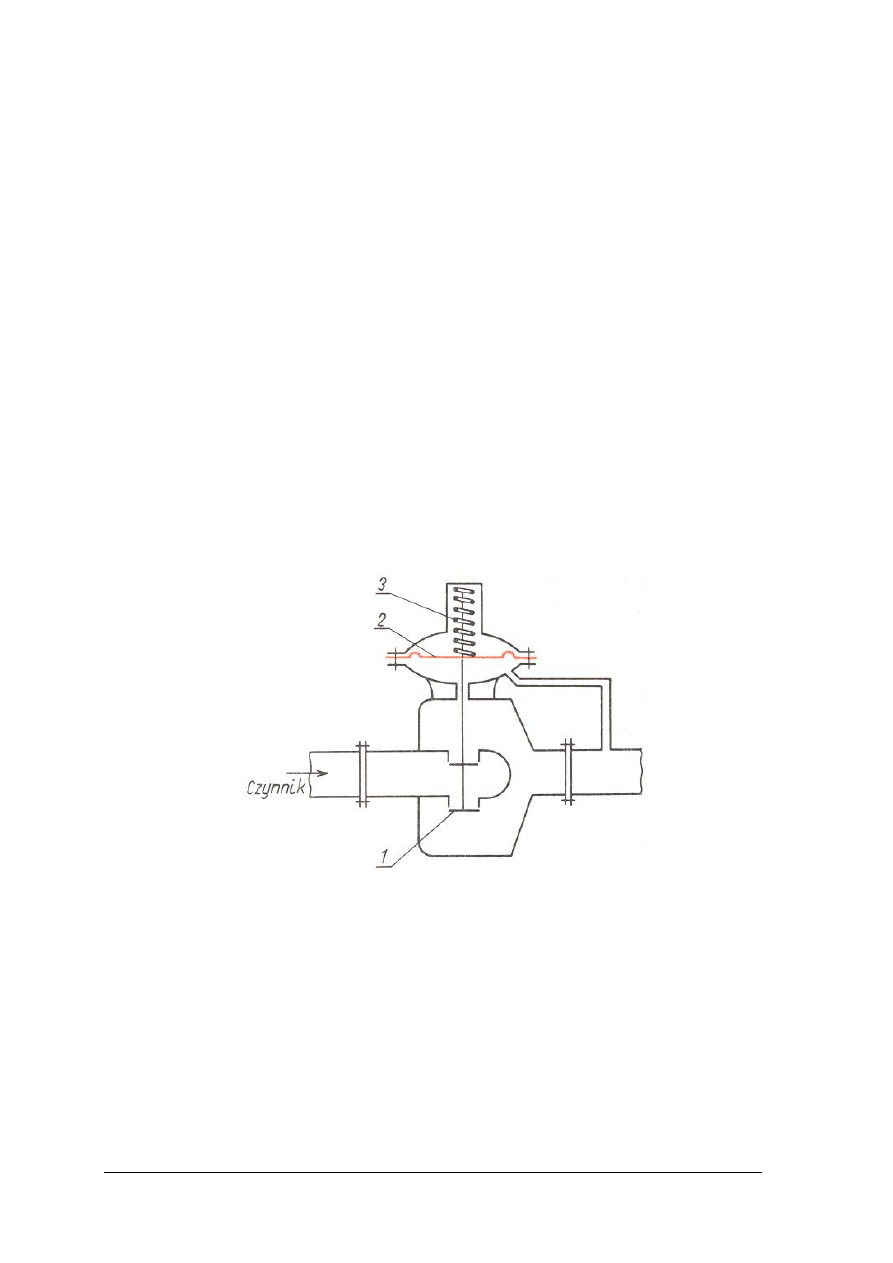
się automatyczne zawory rozprężne (rys. 27), których zadaniem jest utrzymywanie stałej
wartości ciśnienia. Elementem regulacyjnym jest zawór igłowy napędzany przez membranę.
Gdy ciśnienie w parowniku urządzenia chłodniczego będzie większe od wartości zadanej,
wówczas pod działaniem tego ciśnienia membrana zostanie wygięta do góry, przymykając
zawór igłowy co zmniejszy przepływ czynnika chłodniczego. Regulatory ciśnienia
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
bezpośredniego działania znajdują również zastosowanie do
stabilizacji ciśnienia
w pneumatycznych urządzeniach automatyki.
Rys. 27.
Schemat automatycznego zaworu rozprężnego: 1 – zawór igłowy,
2 – membrana, 3 – sprężyna zwrotna, 4 – nastawnik wartości zadanej
[5, s. 186]
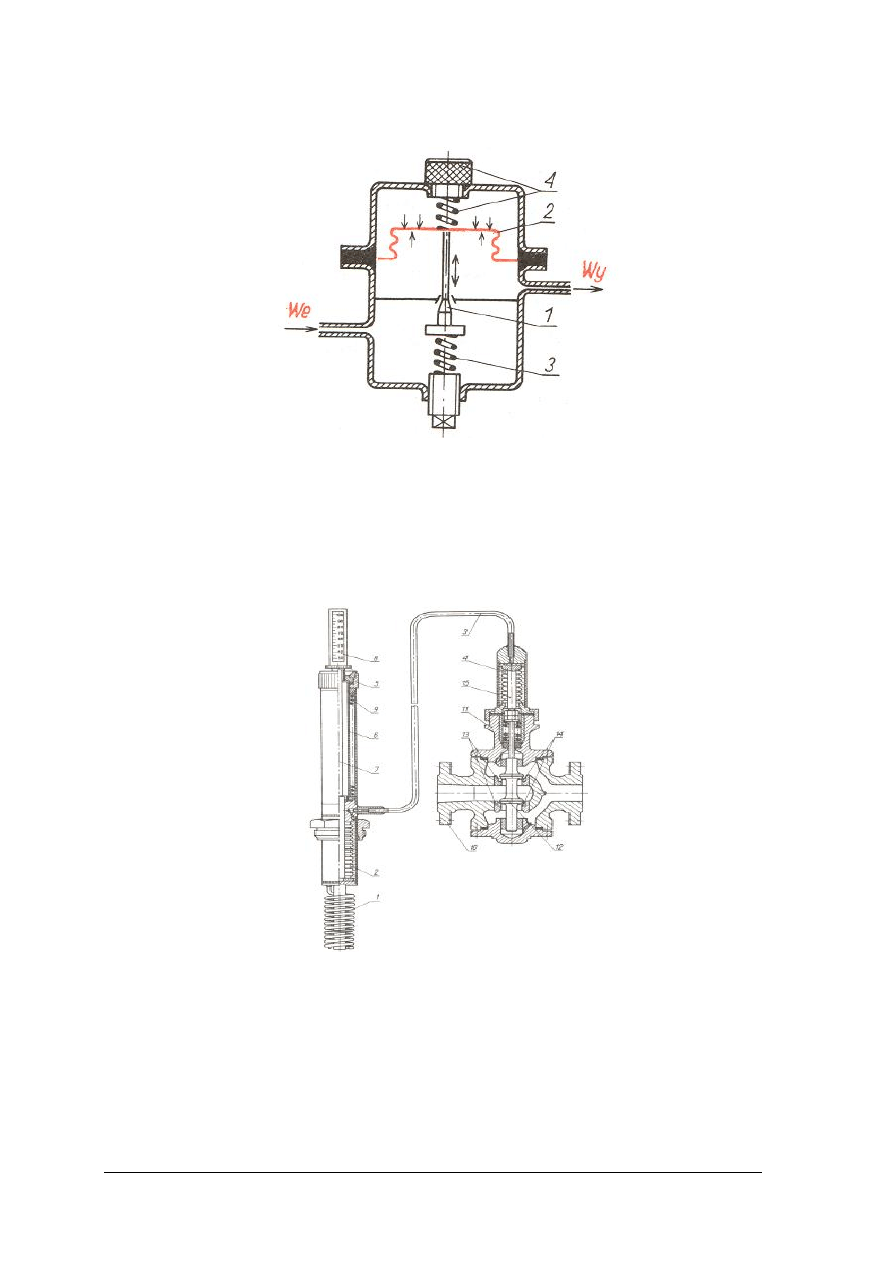
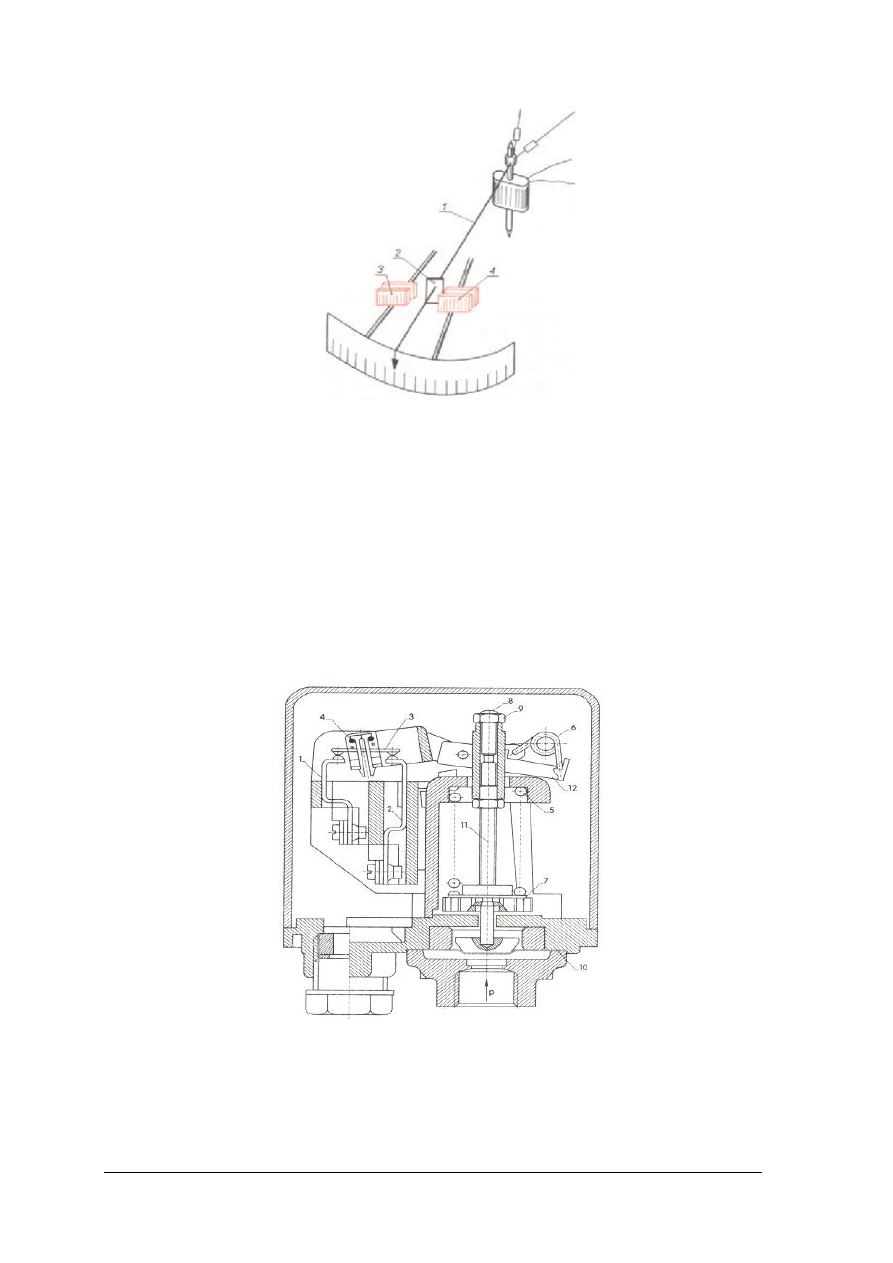
Regulatory temperatury bezpośredniego działania
Podobnie jak regulatory ciśnienia, regulatory te pobierają energię z procesu
regulowanego za pośrednictwem czujnika pomiarowego. Czujnikiem regulatora jest
termometr manometryczny (rys. 28).
Rys. 28. Regulator temperatury bezpośredniego działania: 1 – spirala termometryczna, 2 – mieszek
przegrzania, 3 – kapilara, 4 – mieszek wykonawczy, 5 – pokrętło, 6 – nakrętka,
7 – trzpień gwintowany, 8 – wskaźnik, 9 – sprężyna, 10 – korpus zaworu, 11 – dławnica,
12 – grzybek zaworu, 13 – gniazdo zaworu, 14 – wkładka teflonowa, 15 – popychacz
mieszka [5, s. 181]
Spirala termometryczna zanurzona jest w czynniku regulowanym. Pod wpływem zmian
temperatury zmienia się objętość cieczy manometrycznej
,
która działa na mieszek
wykonawczy powodując zmianę położenia grzybka zaworu. Do nastawiania wartości zadanej
służy pokrętło z naniesioną podziałką. Zawór tego regulatora montowany jest w rurociągu
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
doprowadzającym gorącą parę lub ciecz. Charakterystyka regulatora podobnie jak regulatora
ciśnienia jest typu P (proporcjonalny). Regulator ma zabezpieczenie przed uszkodzeniem
mieszków przy przegrzaniu czujnika. Zakres zmian temperatury regulowanej, powodujący
pełne przesterowanie zaworu wynosi w zależności od wykonania od 6 do 8
o
C. Proste
regulatory bezpośredniego działania znalazły szerokie zastosowanie w motoryzacji
(termostaty), w lodówkach, w zaworach przygrzejnikowych instalacji centralnego
ogrzewania. W tych regulatorach czujnikiem jest mieszek sprężysty, wypełniony częściowo
cieczą, a częściowo parą nasyconą. Bardzo często czujniki wypełnia się gazem
propan – butan.
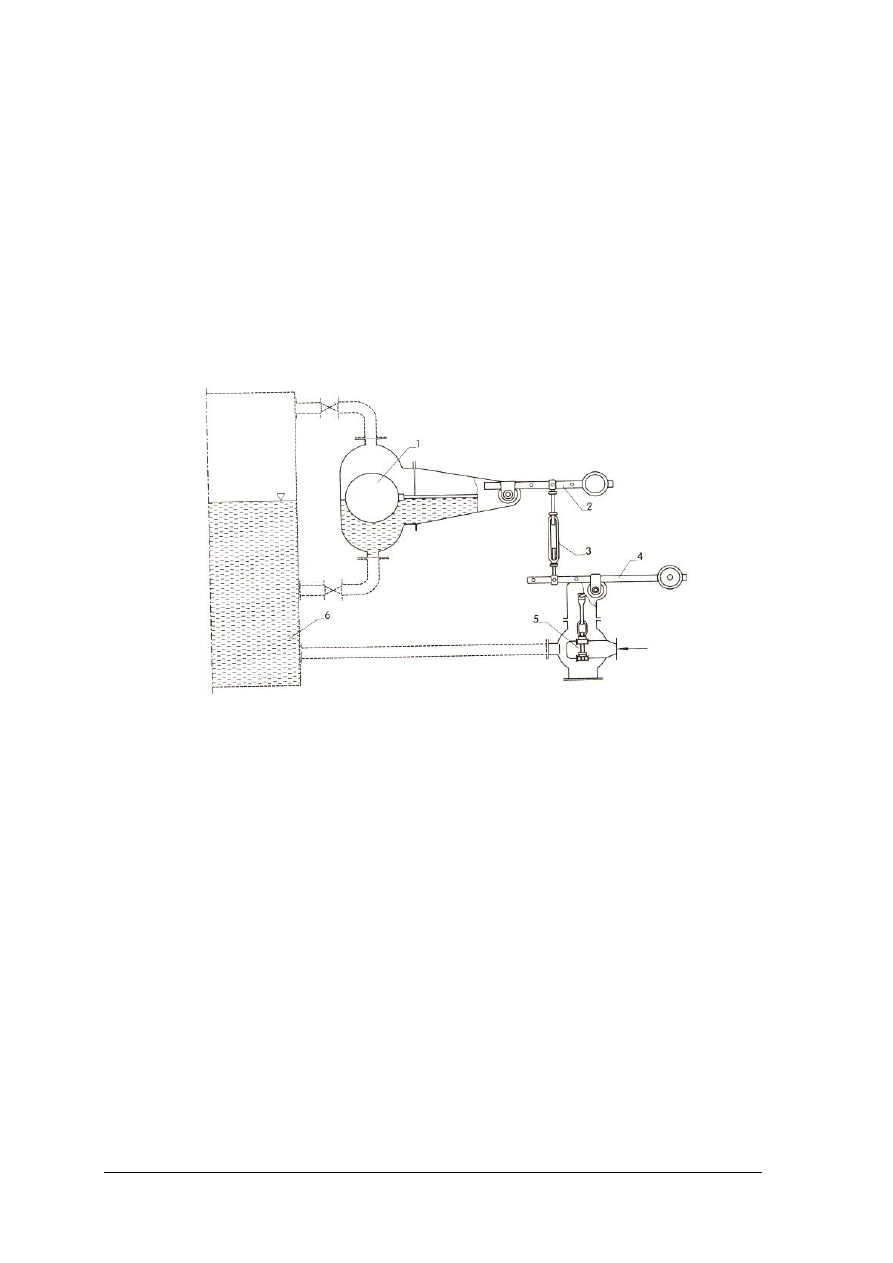
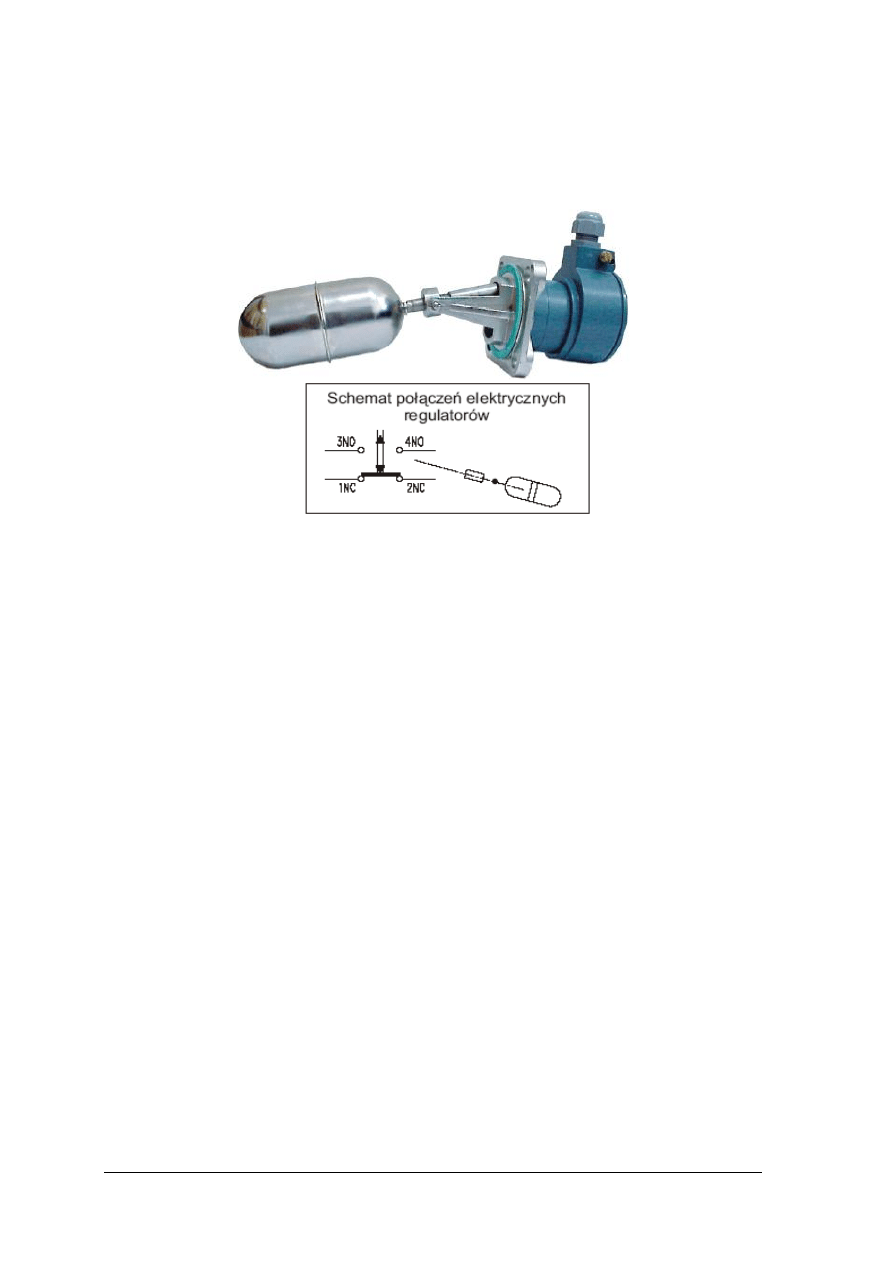
Regulatory poziomu bezpośredniego działania
Regulator z komorą pływakową (rys. 29)
jest przeznaczony do regulacji poziomu wody
w zbiornikach ciśnieniowych o ciśnieniu maksymalnie
do 0,25 MPa. Nastawiając regulator
należy dobrać długość dźwigni przekazującej sygnał od pływaka na zawór.
Rys. 29. Schemat regulatora poziomu: 1 – pływak, 2 – dźwignia, 3 – cięgno, 4 – dźwignia,
5 – zawór, 6 – zbiornik z regulacją poziomu [5, s. 168]
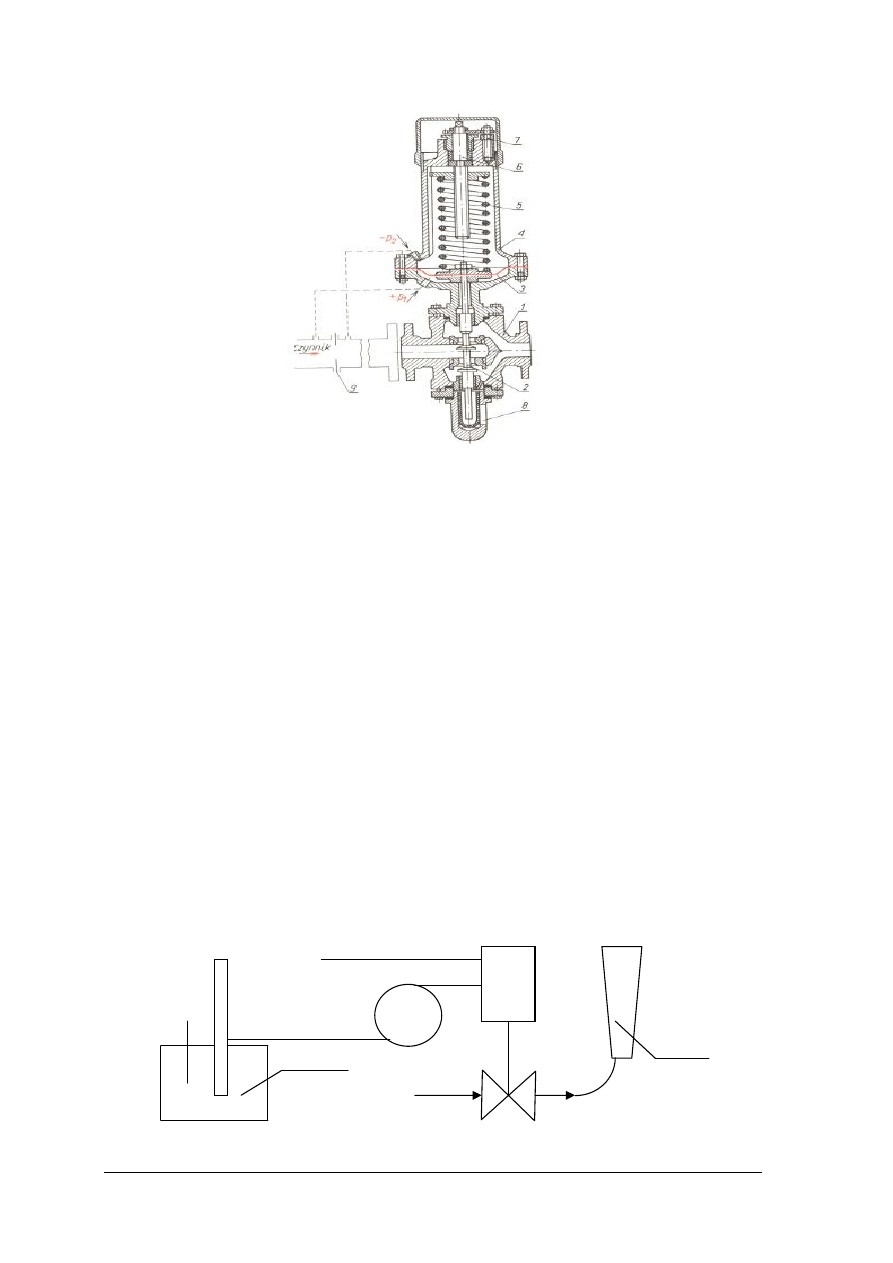
Regulator strumienia (przepływu)
Działanie tego regulatora (rys. 30) polega na utrzymywaniu stałej, zadanej wartości
spadku ciśnienia na zwężce pomiarowej. Wartość zadaną nastawia się zmieniając naciąg
sprężyny zwrotnej. Wartości różnic ciśnień wynoszą zależnie od wybranego zakresu
5 do 20 kPa, 10 do 40 kPa lub 30 do 120 kPa. Podobnie jak pozostałe regulatory jest to
regulator proporcjonalny.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Rys. 30.
Regulator strumienia bezpośredniego działania: 1 – korpus zaworu, 2 – zespół
grzybka, 3 – membrana, 4 – korpus górny, 5 – sprężyna zwrotna, 6 – śruba
nastawcza, 7 – zespół nastawczy, 8 – wskaźnik położenia, 9 – zwężka pomiarowa
[5, s. 187]
4.6.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Czy regulatory bezpośredniego działania wymagają zasilania?
2. Jakie znasz regulatory bezpośredniego działania?
3. Co jest elementem pomiarowym w regulatorze ciśnienia?
4. Na jakiej zasadzie działa regulator temperatury bezpośredniego działania?
5. Jaką charakterystykę mają regulatory bezpośredniego działania?
6. Co jest elementem pomiarowym w regulatorze poziomu?
7. Na jakiej zasadzie działa regulator strumienia?
4.6.3. Ćwiczenia
Ćwiczenie 1
Zainstaluj regulator temperatury bezpośredniego działania na stanowisku pomiarowym
przedstawionym na schemacie. Wyznacz charakterystyki statyczne dla różnych nastaw
wartości zadanej zmieniając temperaturę czujnika w zbiorniku oraz mierząc przepływ wody
lub powietrza rotametrem. Wyniki wpisz do tabeli pomiarowej.
regulator temperatury
czujnik
rotametr
zbiornik
czynnik
Rys. do ćwiczenia 1
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Tabela do ćwiczenia 1
Wartość zadana
Temperatura czujnika w termostacie
T
Wskazanie rotametru Q
o
C
o
C
l / min
40
40
41
42
…
46
50
50
…
60
60
…
Po wyznaczeniu charakterystyki regulatora temperatury wykonaj wykresy zależności
Q = f(T).
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zainstalować regulator temperatury na stanowisku,
2) umieścić czujnik w termostacie,
3) ustalić przepływ powietrza lub wody przez rotametr,
4) zmieniać wartości zadane zgodnie z tabelą,
5) wpisać do tabeli pomiarowej wyniki pomiarów,
6) przeprowadzić analizę wykonanych pomiarów,
7) wykonać wykresy charakterystyk regulatora.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z przepływem czynnika,
–
termostat z osprzętem,
–
badany regulator temperatury bezpośredniego działania,
–
karty katalogowe regulatora.
Ćwiczenie 2
Wyznacz charakterystykę dynamiczną regulatora z ćwiczenia 1 metodą skoku
jednostkowego dla skoku 40
o
C na 20
o
C na stanowisku według powyższego schematu. Pomiar
czasu odpowiedzi na skok jednostkowy wykonaj stoperem. Uzyskane wyniki należy nanieść
na wykres i dokonać analizy przebiegu czasowego.
Tabela do ćwiczenia 2
Strumień objętości
[ l / min ]
Czas [ sek ]
0
2
4
6
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zainstalować regulator temperatury na stanowisku,
2) umieścić czujnik w termostacie,
3) ustalić przepływ powietrza lub wody przez rotametr,
4) przenieść czujnik do temperatury otoczenia włączając stoper,
5) wyniki pomiarów wpisać do tabeli pomiarowej,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
6) przeprowadzić analizę wykonanych pomiarów,
7) wykonać wykresy charakterystyk regulatora.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z przepływem czynnika,
–
stoper,
–
termostat z osprzętem,
–
badany regulator temperatury bezpośredniego działania,
–
karty katalogowe regulatora.
4.6.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić rodzaje regulatorów bezpośredniego działania?
2)
dobrać zakres regulacji regulatorem temperatury?
3)
ustawić wartość zadaną regulatora?
4)
scharakteryzować zastosowanie regulatorów?
5)
posłużyć się katalogami regulatorów?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
4.7. Regulatory pneumatyczne i elektroniczne
4.7.1. Materiał nauczania
Regulatory pneumatyczne
Regulatory pneumatyczne
zostaną opisano na przykładzie regulatorów mieszkowych,
gdyż stanowią najbardziej rozpowszechnioną grupę regulatorów. Struktury i charakterystyki
regulatorów
przedstawiono
w
jednostce
modułowej
731[01].Z1.01
i
opierając
się na zagadnieniach już opanowanych, zostanie przedstawiona budowa i działanie regulatora
mieszkowego PID (rys. 31). Podstawą regulatora jest równoważnia pneumatyczna ze znanym
już wzmacniaczem dysza – przysłona (kaskada pneumatyczna). Na równoważnię
pneumatyczną działają siły pochodzące od czterech mieszków. Do dwóch mieszków
środkowych 1, 2 są
doprowadzone ciśnienia od wartości zadanej i wielkości regulowanej
z przetwornika pneumatycznego. Przy zmianie uchybu regulacji wywołanej różnicą pomiędzy
wartością zadaną, a wielkością regulowaną - zmienia się ciśnienie kaskadowe
we wzmacniaczu wstępnym. To ciśnienie jest kierowane do wzmacniacza mocy
oraz do mieszków sprzężeń zwrotnych, które to elementy
kształtują charakterystykę
regulatora.
Rys. 31. Schemat pneumatycznego regulatora proporcjonalno – całkująco – różniczkującego (PID)
systemu PNEFAL 2: 1 – równoważnia czteromieszkowa, 2 – człon proporcjonalno -
różniczkowy, 3 – wzmacniacz 1:1, 4 – przekaźnik bocznikujący dławik T
i
przy
sterowaniu ręcznym, 5 – przełącznik wprost - odwrotnie, 6 – wskaźnik
dwuwskazówkowy stacyjki, 7 – przełączik A / R, 8 – nastawnik wartości zadanej,
9 – nastawnik sterowania ręcznego [5, s. 230]
W równoważni czteromieszkowej mieszki 1 i 2 to mieszki wytworzenia uchybu regulacji,
mieszki 3 i 4 mieszki sprzężeń zwrotnych. W regulatorze PID w stanie ustalonym ciśnienia
w mieszkach 1 i 2 są sobie równe. Załóżmy, że przy istnieniu stanu ustalonego nastąpi
skokowy wzrost ciśnienia wejściowego. Spowoduje to zbliżenie przysłony do dyszy i wzrost
ciśnienia kaskadowego, czyli wyjściowego. To ciśnienie wyjściowe po przejściu przez
wzmacniacz mocy kierowane jest do mieszków sprzężeń zwrotnych, które we współpracy
z dławikami i komorami pojemnościowymi kształtują strukturę sygnału wyjściowego
z regulatora. Regulator współpracuje ze stacyjką sterowania A/R, na której ustalamy poziomy
wartości zadanej oraz ręcznego sterowania.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
W systemie PNEFAL 2 dodatkowe wyposażenie regulatora ogranicza się do stacyjki
manipulacyjnej i wskaźników lub rejestratorów dołączonych do regulatora z zewnątrz.
Stacyjka zawiera dwa zadajniki ciśnienia ; jeden do nastawienia wartości zadanej, a drugi
do wytworzenia sygnału sterowania ręcznego oraz przełącznik automatyka – ręczne
i dwuwskazówkowy miernik do pomiaru ciśnienia wyjściowego. Wartości ciśnień zadanych
regulujemy pokrętłami. Ciśnienia kierowane do regulatora są oczywiście w grupie ciśnień
standardowych to jest 20 do 100 kPa. Poza omówionym regulatorem o strukturze PID
występują również regulatory oparte na równoważni mieszkowej o charakterystyce
P oraz PD. Struktura regulatora PID jest najbardziej skomplikowana.
Regulatory elektroniczne
Dzięki zastosowaniu do budowy regulatorów nowoczesnych elementów elektronicznych
regulatory
te
charakteryzują
się
bardzo
dobrymi
parametrami
technicznymi
i eksploatacyjnymi. Rozwój techniki mikroprocesorowej i elementów scalonych spowodował
znaczną poprawę jakości regulatorów oraz możliwości współpracy z systemami
komputerowymi. Regulatory elektroniczne budowane są w wersji analogowej z wyjściowym
sygnałem prądowym lub napięciowym oraz w wersji cyfrowej z konfiguracją komputerową.
Konstrukcje i odmiany tych regulatorów mają budowę aparatową z umieszczoną płytą
czołową spełniającą funkcje zadajnika, wskaźnika uchybu oraz przycisków
,
którymi
parametryzuje się regulator. W tylnej części obudowy jest listwa zaciskowa
,
do której
podłączone są sygnały wejściowe oraz wyjściowe regulatora. Z reguły takie regulatory mają
charakterystyki PID i możliwości wyboru rodzaju regulacji.
Budowa regulatora MRC – 03
Regulator MRC-03 jest urządzeniem zbudowanym na bazie mikroprocesora INTEL
80C88. W części powiązań obiektowych regulator posiada:
–
4 oddzielone galwanicznie wejścia dla sygnałów z regulowanego obiektu,
–
2 wejścia dwustanowe umożliwiające przyjęcie rozkazu zewnętrznego, realizującego
przejęcie regulatora na poziom bezpieczny, ustawienie wyjścia analogowego na zadanej
wartości oraz wyłączenie wyjścia trójstanowego,
–
przyjęcie sygnału AUTOMATYKA/RĘKA z zewnętrznej stacyjki,
–
2 wyjścia dwustanowe do sygnalizowania: rodzaju pracy "A" lub "R" i przejęcia
regulatora na POZIOM BEZPIECZNY,
–
1 wyjście trójstanowe do sterowania elementem wykonawczym i/lub 1 wyjście
trójstanowe do sygnalizacji ograniczenia dolnego i górnego,
–
1 wyjście ciągłe analogowe do sterowania elementem wykonawczym 0 – 5mA
lub 4–20mA.
Płyta czołowa regulatora (rys. 32) wyposażona jest w przyciski, linijkę diodową,
wskaźniki cyfrowe oraz diody sygnalizacyjne. Płyta spełnia jednocześnie rolę stacyjki
sterowania oraz panelu operatorskiego. Stacyjkę sterowania tworzą wyświetlacze cyfrowe
"A" i "C" oraz znajdująca się pomiędzy nimi linijka diodowa, przyciski koloru żółtego i diody
sygnalizacyjne. Stacyjka umożliwia wybór rodzaju pracy regulatora: AUTOMATYKA LUB
RĘKA. Wyboru rodzaju pracy dokonuje się przyciskiem AUTOMAT/RĘKA, znajdującym
się w górnej części płyty czołowej. Stan pracy, w jakim znajduje się regulator sygnalizowany
jest przez diodą z odpowiednim opisem "A" lub "R". W rodzaju pracy AUTOMATYKA
sterowanie elementem wykonawczym odbywa się automatycznie (reguluje regulator) według
ustalonego w trakcie konfigurowania algorytmu i parametrów regulacji. W rodzaju pracy
RĘKA sterowanie elementem wykonawczym odbywa się ręcznie przyciskami "+" i "-" koloru
żółtego umieszczonymi w górnej części płyty czołowej regulatora. Regulator wtedy nie
reguluje i jest w trybie śledzenia. W obu rodzajach pracy jako wskaźniki wielkości
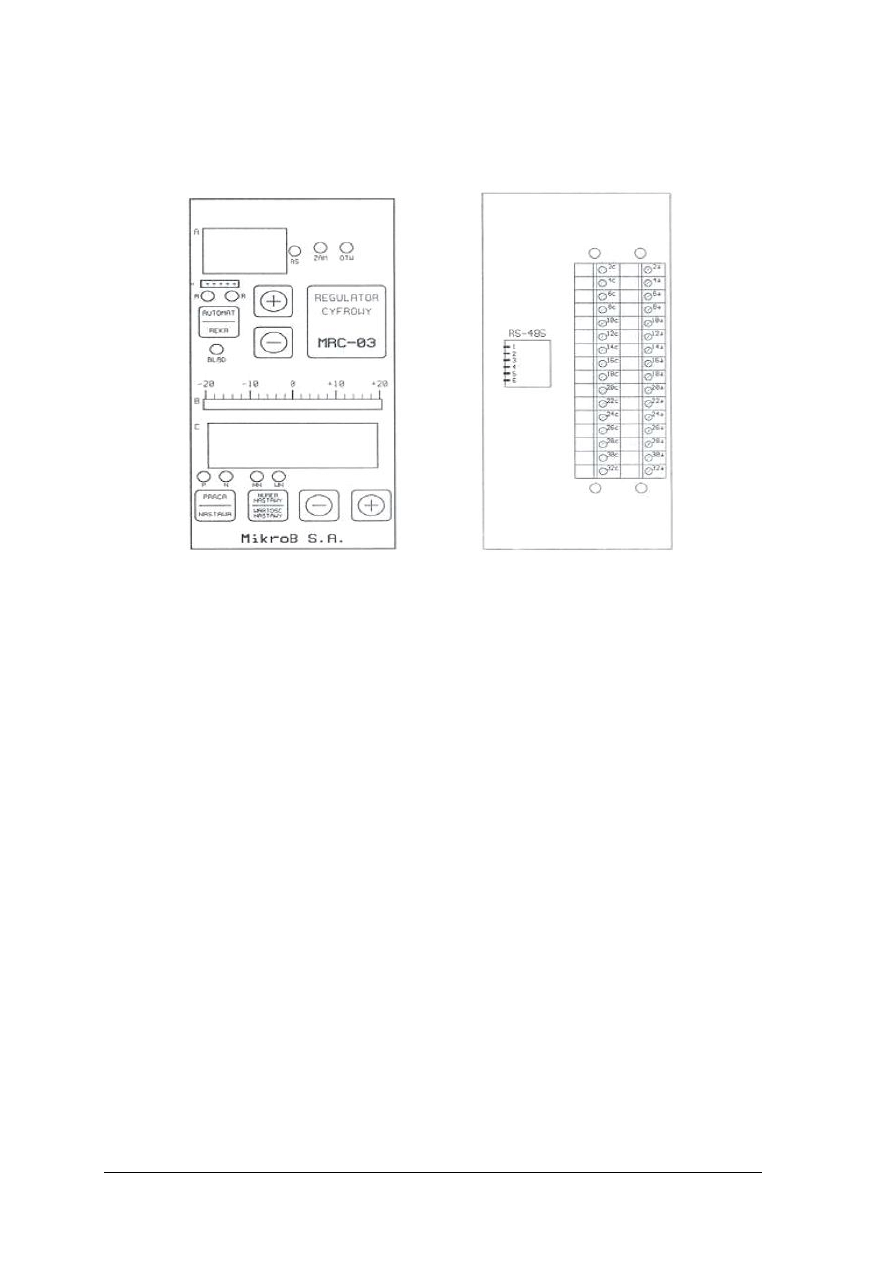
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
mierzonych lub regulowanych służą linijka diodowa "B" oraz wyświetlacze cyfrowe
"A" i "C". Wyboru wskazań wielkości mierzonych na dany wskaźnik dokonuje się podczas
konfigurowania regulatora. Regulator można konfigurować ręcznie korzystając z adresów
zawartych w DTR, lub komputerowo korzystając z oprogramowania HOST.EXE.
Rys. 32. Płyta czołowa regulatora MRC–03
[DTR regulatora]
Rys. 33. Płyta tylna regulatora cyfrowego MRC– 3
[DTR regulatora]
Na płycie tylnej regulatora (rys. nr 33) umieszczona jest listwa zaciskowa, służąca
do podłączenia zasilania, sygnałów wejściowych i wyjściowych. Do zacisków można
podłączyć przewody o maksymalnym przekroju 1,5 mm
2
. Dodatkowo wyprowadzone jest
gniazdo RJ-6 do podłączenia interfejsu RS485. Podczas konfigurowania regulatora można
wybrać opcję regulacji stałowartościowej, kaskadowej lub nadążnej.
4.7.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co jest podstawowym elementem regulatora mieszkowego?
2. Jak realizowane są nastawy regulatora pneumatycznego?
3. Jaki jest wzmacniacz wstępny w regulatorze pneumatycznym?
4. Jakie są sygnały wejściowe i wyjściowe z regulatora elektronicznego?
5. Jak konfiguruje się strukturę regulatora elektronicznego?
6. Co jest wyświetlane na płycie czołowej regulatora elektronicznego?
7. Jakie rodzaje regulacji można ustawiać na regulatorze elektronicznym?
4.7.3. Ćwiczenia
Ćwiczenie1
Wykreśl i przeanalizuj wykres z rejestratora i określ wartości jak dla regulatora PID.
Wykonaj podobne pomiary dla innych nastaw regulatora.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Rys.
do ćwiczenia 1, 1 – badany regulator PID, 2 – stabilizator ciśnienia, Q = 200l/ h,
3 – stabilizator ciśnienia o małym strumieniu objętości, 4 – manometry,
5 – rejestrator sygnału pneumatycznego
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zainstalować regulator mieszkowy PID na stanowisku,
2) ustalić ciśnienie zasilania,
3) ustalić ciśnienie regulowane,
4) ustalić nastawy regulatora,
5) wykonać skok ciśnienia regulowanego,
6) zarejestrować odpowiedź regulatora,
7) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe,
–
rejestrator pneumatyczny,
–
karta katalogowa regulatora pneumatycznego.
Ćwiczenie 2
Przeprowadź badanie regulatora PID dla różnych nastaw.
komputer
rejestrator
źródła
prądowe
opornik
wzorcowy 100
Ω
Rys. do ćwiczenia 2
Regulator
MRC –
03

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zainstalować regulator PID na stanowisku,
2) podłączyć źródła prądowe do odpowiednich zacisków regulatora,
3) ustalić sygnały wejściowe prądowe,
4) ustalić nastawy regulatora komputerowo,
5) wykonać skok prądowy,
6) zarejestrować odpowiedź regulatora,
7) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe,
–
zestaw komputerowy z oprogramowaniem,
–
opornik wzorcowy 100
Ω
,
–
rejestrator elektryczny z regulowanym posuwem taśmy,
–
karta katalogowa regulatora.
4.7.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić rodzaje regulatorów mieszkowych?
2)
scharakteryzować zasady uruchomienia regulatora mieszkowego?
3)
ustawić poziom sygnału wyjściowego regulatora?
4)
scharakteryzować budowę regulatora elektronicznego?
5)
skonfigurować komputerowo regulator?
6)
wykonać zapis sygnału wyjściowego z regulatora?
7)
posługiwać się katalogami regulatorów?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
4.8. Regulatory dwustanowe
4.8.1. Materiał nauczania
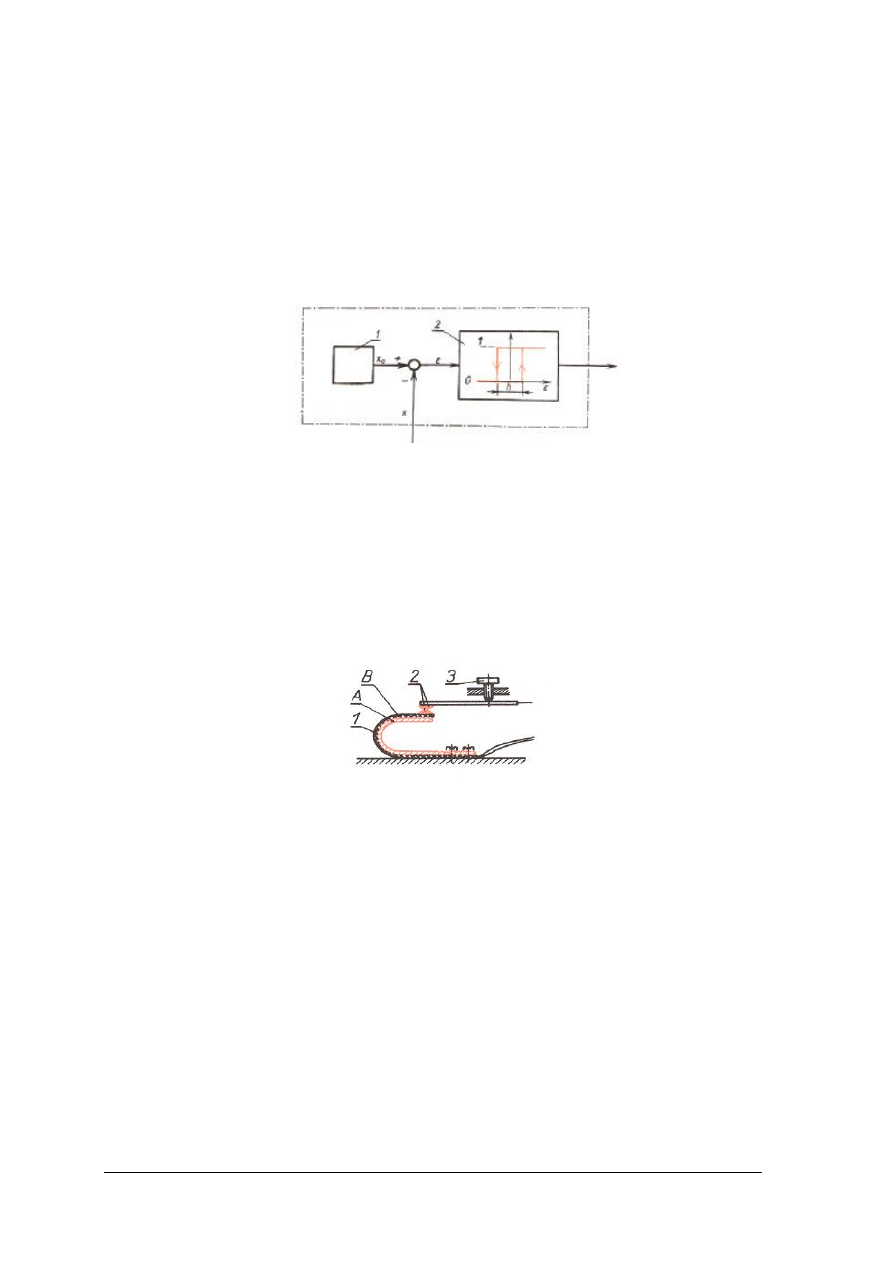
Istota regulacji dwustanowej polega na tym, że na wyjściu regulatora otrzymujemy
sygnał, który może przyjmować tylko dwa stany 0 i 1. Stanom tym odpowiada załączanie
i wyłączanie dopływy energii do obiektu. Najprostszym regulatorem dwustanowym jest taki,
w którym element o charakterystyce przekaźnikowej jest przełączany sygnałem uchybu
(rys. 34).
Rys. 34.
Schemat blokowy regulatora dwustanowego: 1 – nadajnik wartości
zadanej, 2 – element dwustanowy, h – szerokość pętli histerezy [5, s. 234]
Regulacja dwustanowa, z uwagi na bardzo prostą budowę układu, znalazła szerokie
zastosowanie zarówno w urządzeniach przemysłowych, jak i w urządzeniach gospodarstwa
domowego. Do najczęściej stosowanych regulatorów dwustanowych należą: regulatory
temperatury, ciśnienia oraz poziomu.
Regulatory dwustanowe temperatury
Najbardziej powszechny jest regulator bimetaliczny (zwany termostatem) stosowany
w żelazkach. Na rysunku 35 przedstawiono budowę tego regulatora.
Rys. 35.
Regulator bimetaliczny (żelazkowy): 1 – taśma bimetalowa, 2 – zestyk, 3 - śruba
regulacyjna, A – materiał o małym współczynniku rozszerzalności cieplnej,
B – materiał o dużym współczynniku rozszerzalności cieplnej [5, s. 235]
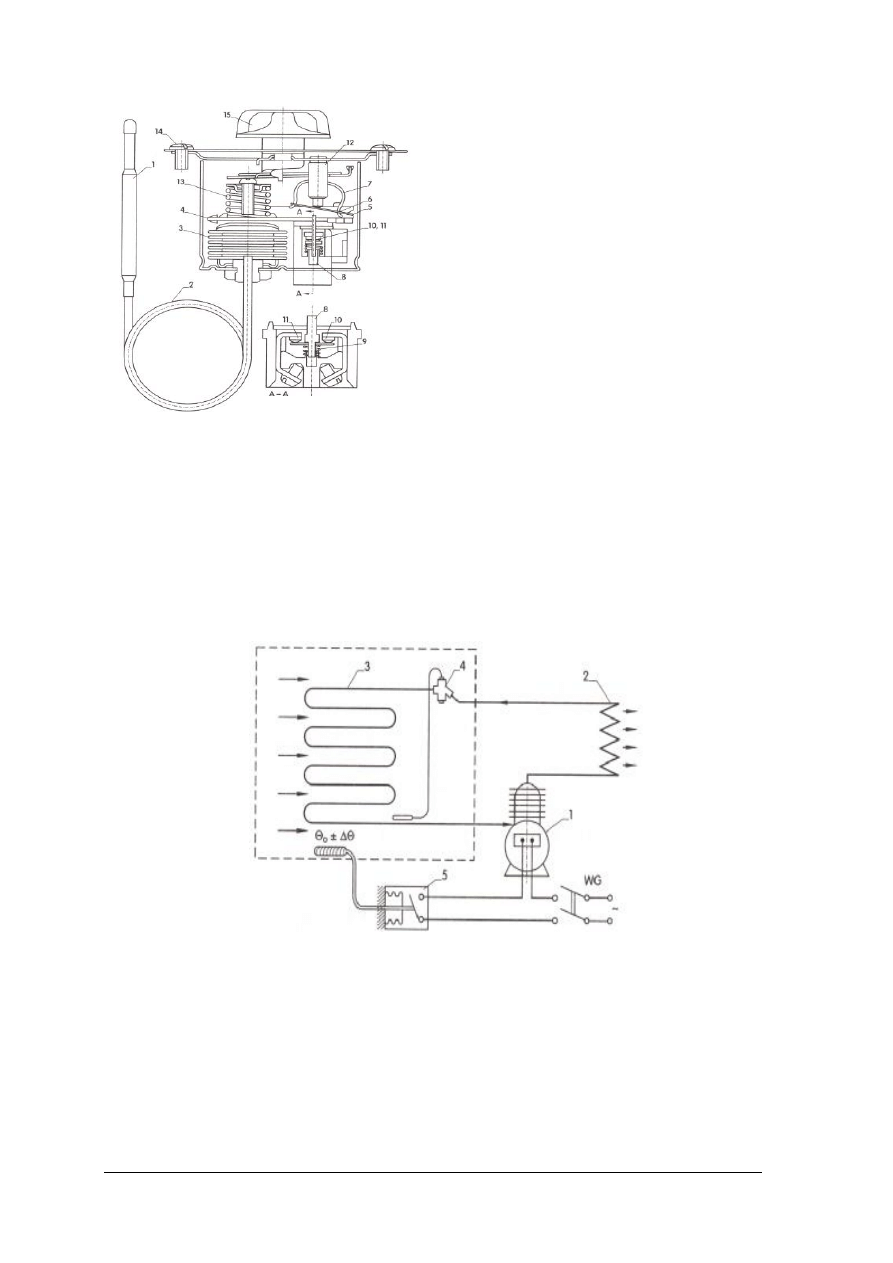
W technice chłodniczej szerokie zastosowanie ma regulator dwustanowy, którym jest
termostat parownikowy (rys. 36).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
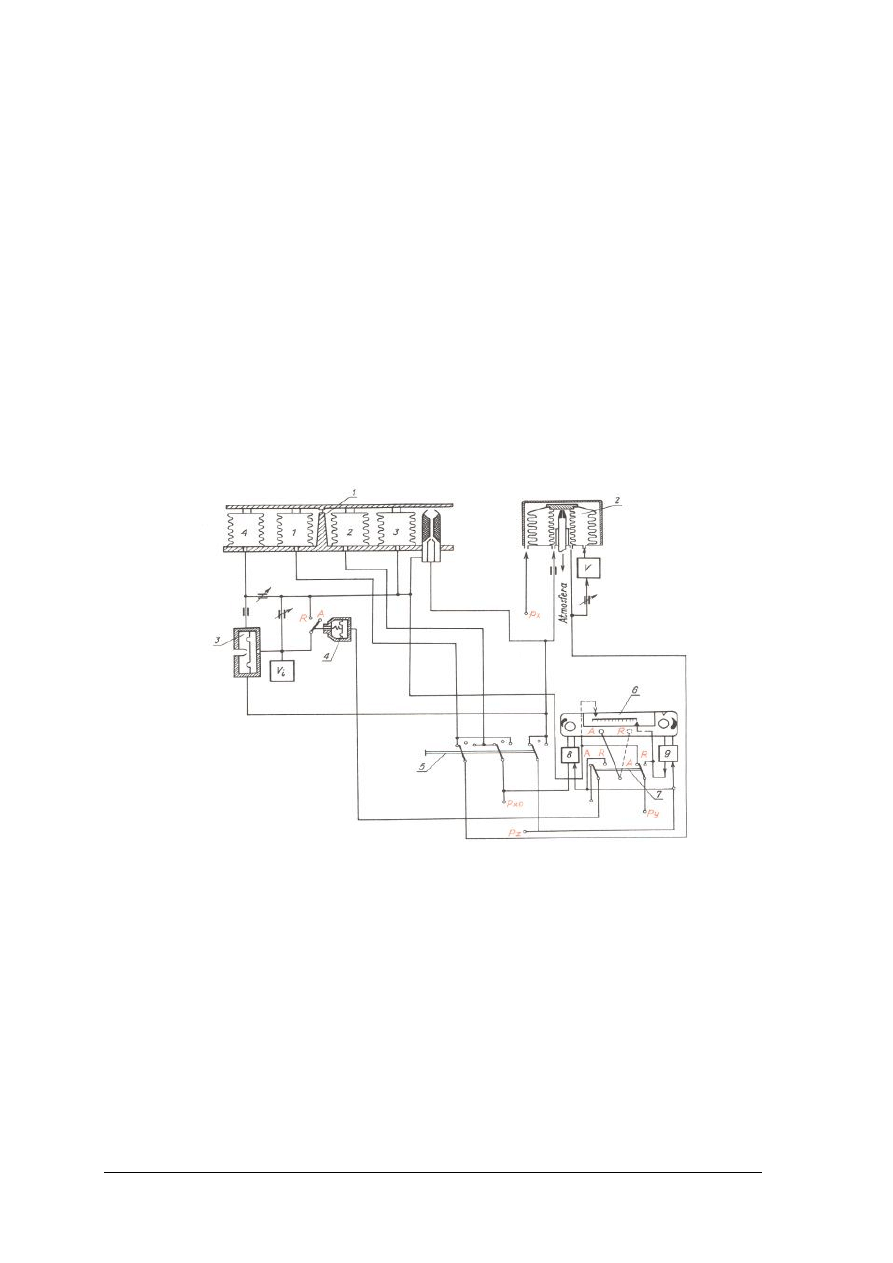
48
Jego działanie oparte jest na zmianie ciśnienia w zamkniętym układzie cieczy
manometrycznej poddanej działaniu temperatury. Na rys. 37 przestawiono zastosowanie tego
termostatu do regulacji w układzie chłodniczym.
Rys. 37. Schemat układu chłodniczego z zastosowanym termostatem parownikowym:
1 – sprężarka, 2 – skraplacz, 3 – parownik, 4 – zawór rozprężny, 5 – termostat
[6, s. 118]
Do
regulacji
dwustanowej
stosowane
są
również
regulatory
wychyłowe
z logometrycznym ustrojem pomiarowym (rys.38). Sygnałem wejściowym w tych
regulatorach jest zmiana rezystancji z czujników Pt 100, a sygnałem wyjściowym styki
przekaźnika. Regulator ten może działać jako dwu - lub trzystanowy.
Rys. 36. Termostat parownikowy typu zamkniętego:
1 – czujnik, 2 – rurka kapilarna, 3 – mieszek,
4 – dźwignia, 5 – dźwignia, 6 – oś podparcia,
7 – sprężyna, 8 – popychacz, 9 – sprężyna,
10, 11 – styki, 12 – śruba nastawcza
temperatury, 13 – sprężyna, 14 – śruby,
15 – pokrętło [6, s. 129]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Rys. 38. Schemat budowy regulatora trójstanowego: 1 – wskazówka,
2 – blaszka aluminiowa, 3, 4 – czujniki [5, s. 236]
W powyższym regulatorze wskazówka stanowi element logometrycznego ustroju
pomiarowego.
Wychylenie
wskazówki
wywołane
zmianą
temperatury
powoduje
przemieszczenie blaszki aluminiowej i wejście jej w szczeliny czujników, którymi są cewki
generatora wielkiej częstotliwości. Powoduje to wygaszenie drgań i załączenie jednego
z cewek przekaźników.
Regulatory dwustanowe ciśnienia
Regulatory te mogą mieć konstrukcje mieszkową lub membranową. Na rysunku 39
przedstawiono przekrój regulatora ciśnienia stosowanego do regulacji ciśnienia w hydroforze.
Podobne regulatory są montowane na zbiornikach sprężarek regulując ciśnienie poprzez
załączanie i wyłączanie silnika sprężarki.
Rys. 39. Przekrój regulatora dwustanowego ciśnienia: 1 – styki przednie,
2 – styki tylne, 3 – styki ruchome, 4 – sprężyna stykowa, 5 – sprężyna
ciśnieniowa, 6 – sprężyna przerzutowa, 7 – nakrętka regulacyjna,
8 – wkręt regulacyjny, 9 – nakrętka kontrująca, 10 – membrana,
11 – trzpień, 12 – dźwignia [6, s. 127]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
Regulatory dwustanowe poziomu
W regulatorach poziomu (rys. 40) elementem pomiarowym jest pływak, który
z przeciwnej strony zakończony jest magnesem. Naprzeciw tego magnesu znajduje się drugi
magnes, który przemieszcza się pod wpływem oddziaływania biegunów jednoimiennych.
Ruch drugiego magnesu przeniesiony jest na mikrowyłączniki, albo na styki kontaktronowe.
Rys. 40.
Elektryczny regulator dwustanowy poziomu ERH – 04 [opracowanie własne]
4.8.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaki jest sygnał wyjściowy regulatora dwustanowego?
2. Jakie czujniki są stosowane w regulatorach dwustanowych temperatury?
3. Gdzie stosuje się regulatory dwustanowe temperatury?
4. Jakie czujniki stosowane są w regulatorach dwustanowych ciśnienia?
5. Co uruchamiają styki regulatora ciśnienia?
6. Na jakiej zasadzie działa regulator dwustanowy poziomu?
7. Czym może sterować regulator dwustanowy poziomu?
4.8.3. Ćwiczenia
Ćwiczenie1
Zainstaluj na stanowisku pomiarowym żelazko z termostatem i zmieniając nastawy
temperatury na termostacie żelazka wyznacz przebieg zmian temperatury w czasie,
korzystając z przedstawionego schematu. Na podstawie wykonanych pomiarów sporządź
wykres zmian temperatury w czasie. Przeanalizuj ten wykres dla różnych nastaw temperatury.
Zakłócenia zmian temperatury wywołaj wentylatorem nadmuchu. Na czerwono zaznaczono
aluminiowy blok, do którego zamocowano żelazko.
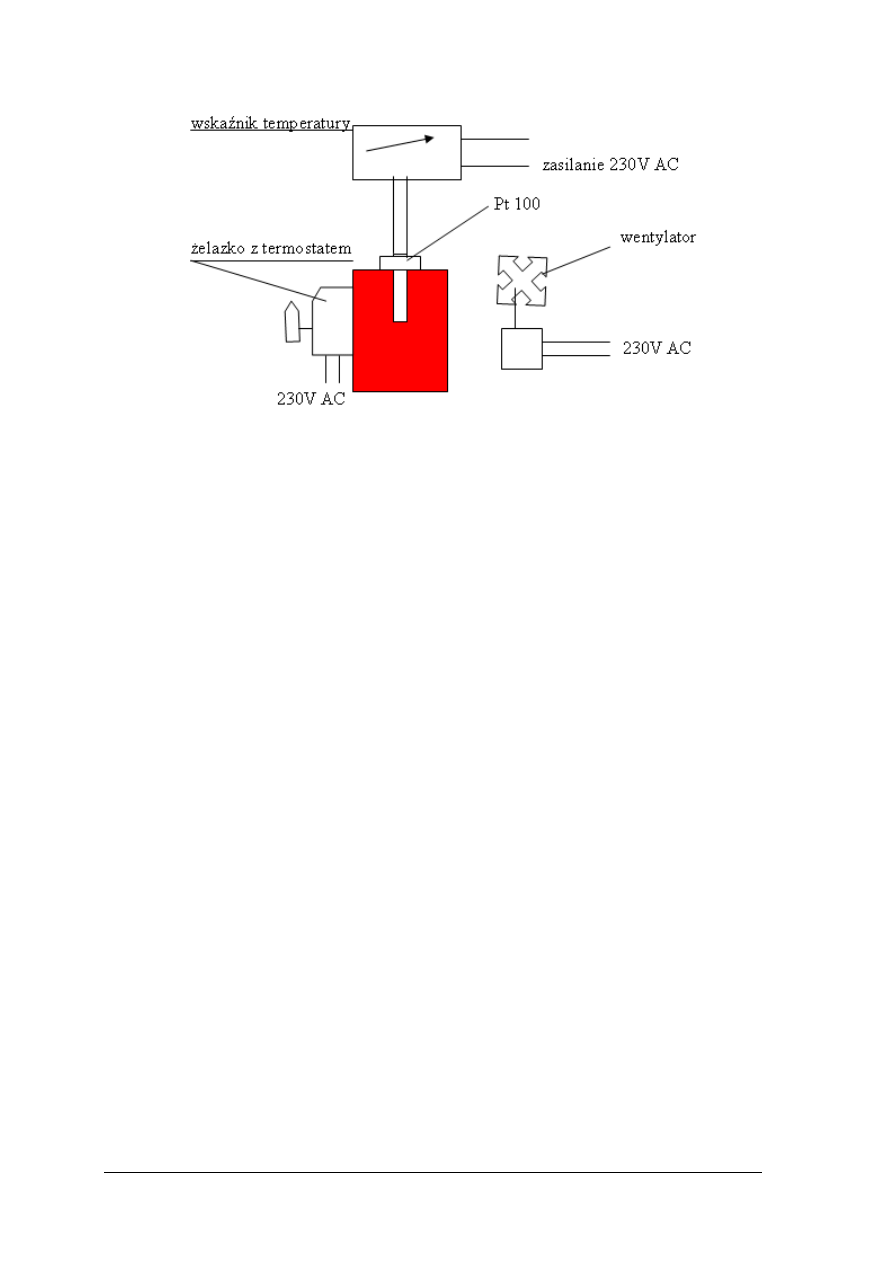
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
Rys. do ćwiczenia 1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć czujnik termometru rezystancyjnego do wskaźnika,
2) podłączyć żelazko do układu zasilania,
3) ustalić pokrętłem termostatu zakres temperatury,
4) załączyć układ grzania jednocześnie włączając stoper,
5) odczytywać temperaturę co 5 sekund,
6) wpisać wyniki do tabeli i wykonać wykres zmian temperatury w czasie,
7) wykonać pomiary dla różnych nastaw,
8) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z żelazkiem i układem odczytu temperatury,
–
wentylator nadmuchu,
–
stoper.
Ćwiczenie 2
Zainstaluj na stanowisku pomiarowym dwustanowy regulator pływakowy poziomu
i wykonaj pomiary dla różnych wartości zakłóceń spustu wody ze zbiornika. Badania
wykonaj na podstawie schematu przedstawionego na rysunku. Do pomiaru poziomu cieczy
w zbiorniku użyj dostępnej metody pomiaru poziomu.
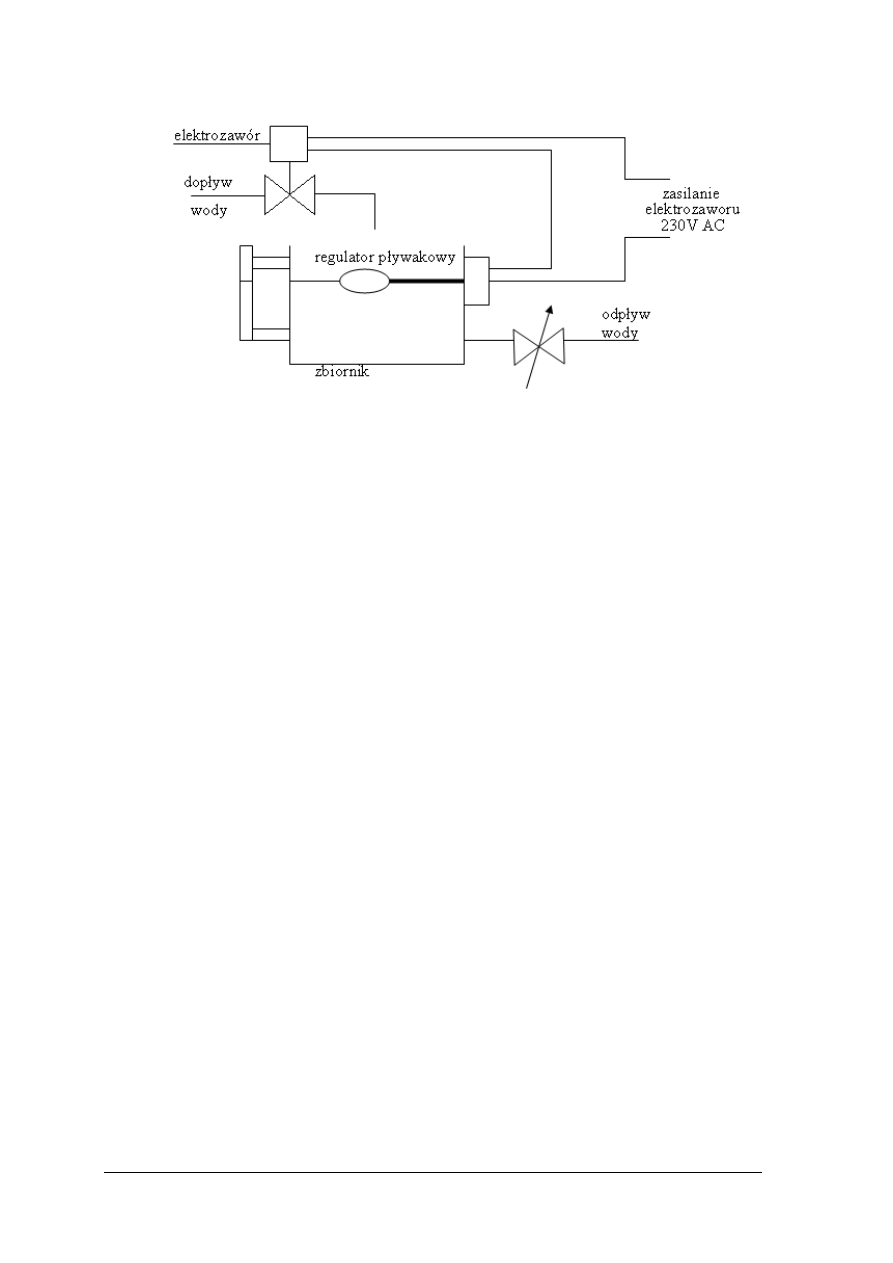
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
Rys. do ćwiczenia 2
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć regulator dwustanowy poziomu zgodnie ze schematem,
2) ustalić natężenie odpływu wody ze zbiornika,
3) wykonać pomiary poziomu wody dla różnych nastaw położenia zaworu odpływowego,
4) odczytywać poziom wody co 5 sekund,
5) wyniki wpisać do tabeli i wykonać wykres zmian poziomu w czasie,
6) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe układem regulacji poziomu,
–
karta katalogowa dwustanowego regulatora poziomu cieczy,
–
stoper.
4.8.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
scharakteryzować zasadę działania regulatorów dwustanowych?
2)
podłączyć regulator dwustanowy temperatury?
3)
podłączyć regulator dwustanowy ciśnienia?
4)
podłączyć regulator dwustanowy poziomu?
5)
dobrać regulator do obiektu regulowanego?
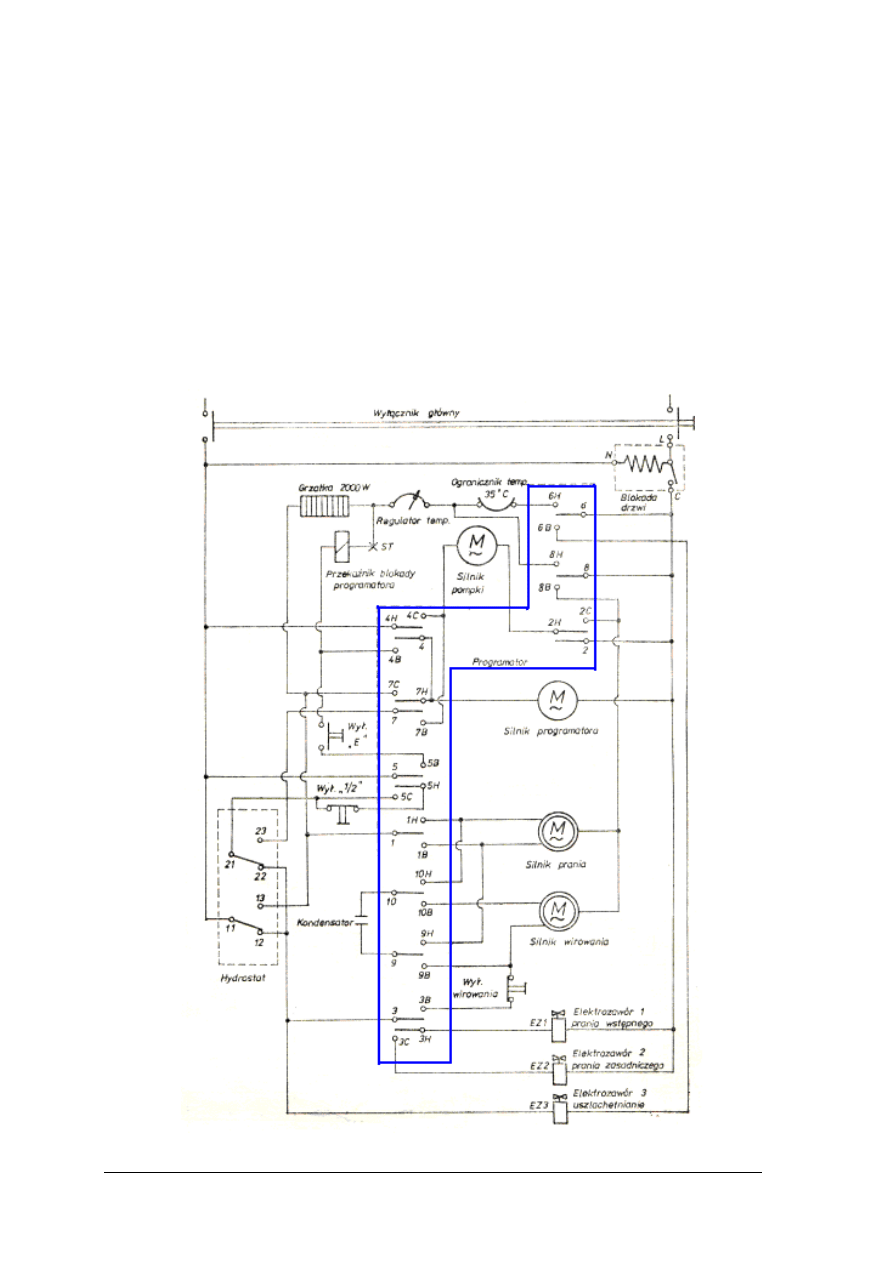
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
4.9. Programatory
4.9.1. Materiał nauczania
Procesy zautomatyzowane nie dotyczą tylko obszarów przemysłu, ale także są stosowane
w sprzęcie gospodarstwa domowego. Dotyczy to przede wszystkim takich urządzeń jak:
pralki automatyczne, mikrofalówki, piecyki z programowanym cyklem i inne. Urządzenia,
które sterują tym sprzętem nazywamy programatorami. Dotychczas stosowano jedynie
programatory wyposażone w synchroniczne silniczki napędowe oraz elementy stykowe
załączające obwody sterowane. Obecnie coraz częściej stosuje się programatory
z elektronicznymi układami sterującymi nie wykluczając układów mikroprocesorowych.
Na rys. 41 przedstawiono schemat ideowy pralki automatycznej z zastosowanym
programatorem stykowym, który uruchamia poszczególne obwody sterowania w pralce.
Rys. 41. Schemat ideowy pralki automatycznej PDG 585 z programatorem stykowym

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
(zaznaczony na niebiesko) [opracowanie na podstawie DTR Polar]
Do programatora dołączone są obwody, którymi są:
–
obwód elektrozaworów dopływu i odpływu wody,
–
obwód regulacji temperatury,
–
obwód załączania obrotów silnika (silnik dwubiegowy),
–
obwód pompki spustu wody,
–
obwody prania „oszczędnego.”
Działaniem tych obwodów koordynuje programator z możliwością nastawy cyklu prania,
który napędza silniczek synchroniczny o stałej prędkości. Wszystkie obwody regulatora
są
wyposażone w dwustanowe elementy załączające. Przejście przez kolejne fazy programu
uzależnione jest od załączenia czujników
dwustanowych poziomu wody (hydrostat)
oraz dwustanowego czujnika temperatury.
4.9.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie są rodzaje czujników współpracujących z programatorem?
2. Jaki rodzaj napędu stosowany jest w programatorze?
3. Kiedy uruchamiany jest kolejny obwód programatora?
4.9.3. Ćwiczenia
Ćwiczenie 1
Przeprowadź badania symulacyjne programatora dla różnych wariantów prania. Opisz
przebieg działania programatora oraz występujące blokady.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć programator do stanowiska zgodnie ze schematem,
2) ustalić położenia wyłączników symulacyjnych,
3) wykonać pomiary działania programatora dla różnych wariantów,
4) opisać działanie blokad poszczególnych obwodów.
Wyposażenie stanowiska pracy:
–
stanowisko pomiarowe z programatorem i symulowanym układem,
–
wyłączniki,
–
żarówki,
–
karta katalogowa programatora,
–
stoper.
4.9.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić zasadę działania programatora?
2)
podłączyć programator do układu symulacyjnego?
3)
zasymulować pracę obwodów programatora?
4)
podłączyć programator elektroniczny?
5)
zasymulować pracę programatora elektronicznego?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawdziwa.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem
a następnie ponownie zakreślić odpowiedź prawidłową.
6. Pracuj samodzielnie, gdyż tylko wówczas będziesz miał satysfakcję z wykonanego
zadania.
7. Jeśli udzielanie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci czas wolny.
8. Na rozwiązanie testu masz 25 minut.
Powodzenia!

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
ZESTAW ZADAŃ TESTOWYCH
1. Przetworniki służą do
a) zamiany czasu na prąd.
b) standaryzacji sygnału.
c) sterowania siłownikiem.
d) regulacji.
2. Wartością standardową sygnału nie jest
a) 0 do 20 mA.
b) 50 mA.
c) 20 do 100 kPa.
d) 4 do 20 mA.
3. Sprzężenie zwrotne w przetworniku ma wpływ na
a) czułość przetwornika.
b) zakres pomiarowy i dokładność.
c) dynamikę przetwornika.
d) sygnał standardowy.
4. W przetworniku elektrycznym pojemnościowym ciśnienia zakres zależy od
a) napięcia zasilania.
b) wielkości ciśnienia.
c) grubości membrany.
d) rodzaju czynnika.
5. W przetworniku binarnym sygnał wyjściowy jest
a) napięciowy.
b) prądowy.
c) ciśnieniowy.
d) zero i jedynkowy.
6. Uruchomienie przetwornika analogowego wymaga
a) ustawienia nachylenia charakterystyki.
b) ustawienia wzmocnienia.
c) ustawienia początku i końca sygnału wyjściowego.
d) ustawienia czułości.
7. Regulator bezpośredniego działania wymaga zasilania
a) ciśnieniem.
b) nie wymaga zasilania.
c) napięciem.
d) prądem.
8. Zakres regulacji w regulatorze temperatury bezpośredniego działania ustala się
a) zadajnikiem przez zmianę objętości.
b) zadajnikiem przez zmianę siły.
c) zadajnikiem przez zmianę prądu.
d) zadajnikiem przez zmianę napięcia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
9. Wzmacniaczy elektrycznych nie stosuje się do sterowania silników
a) klatkowych.
b) pierścieniowych.
c) krokowych.
d) prądu stałego.
10. Falowniki są urządzeniami do
a) wytworzenia fali nośnej.
b) sterowania regulatorami.
c) regulacji prędkości silników.
d) sterowania zaworami.
11. Działanie pneumatycznego regulatora mieszkowego oparte jest na
a) wzmacniaczu mocy.
b) mieszku wejściowym.
c) równoważni pneumatycznej.
d) oporach pneumatycznych.
12. Nastawy regulatora mieszkowego realizowane są przez
a) zmianę ciśnienia.
b) zmianę temperatury powietrza.
c) zespół dławików regulowanych i komór.
d) zespół dysza – przysłona.
13. Konfigurowanie regulatora cyfrowego polega na
a) zmianie sygnału wejściowego.
b) zmianie sygnału wyjściowego.
c) doborze nastaw regulatora.
d) włączeniu zasilania.
14. Podłączając regulator cyfrowy do komputera nie możemy
a) dobrać nastaw regulatora.
b) wybrać dowolnego numeru regulatora.
c) wybrać rodzaju regulacji.
d) ustalić rodzaj sygnału wyjściowego.
15. W strukturze regulatora PID nastawami są
a) X
p
, T
i
.
b) X
p
, T
d
.
c) X
p
, T
i
, T
d
.
d) T
i
, T
d
.
16. W regulatorze dwustanowym temperatury elementem pomiarowym jest
a) membrana.
b) bimetal.
c) sprężyna.
d) kapilara.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
17. Charakterystyka regulatora dwustanowego jest
a) przekaźnikowa.
b) ciągła.
c) nieliniowa.
d) cyfrowa.
18. Zmiany cyklu załączania – wyłączania regulatora zależą od
a) charakterystyki dynamicznej obiektu.
b) charakterystyki statycznej obiektu.
c) rodzaju zasilania.
d) temperatury.
19. Program załączania obwodów programatora pralki automatycznej wymusza
a) napięcie zasilania.
b) producent programatora.
c) sygnał od zewnętrznych czujników stykowych.
d) rodzaj silniczka napędowego.
20. Podłączając programator pralki automatycznej zwracamy uwagę na
a) kolory przewodów.
b) zgodność numeracji przewodów ze schematem.
c) stan końcówek przewodów.
d) izolację przewodów.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
KARTA ODPOWIEDZI
Imię i nazwisko..........................................................................................
Uruchamianie przetworników i regulatorów
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
6. LITERATURA
1. Dąbrowski A.: Pracownia techniczna mechaniki precyzyjnej. WSiP, Warszawa 1985
2. Kamiński L.: Technologia i pomiary dla ZSZ. WSiP, Warszawa 1985
3. Komor Z.: Pracownia automatyki. WSiP, Warszawa 1996
4. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 1994
5. Olszewski M.: Mechatronika. REA, Warszawa 2002
6. Siemieniako F.: Automatyka i robotyka. WSiP, Warszawa 1996
Czasopisma specjalistyczne:
−
Mechanik,
−
Przegląd mechaniczny,
−
Bezpieczeństwo Pracy,
−
Maszyny Technologie Materiały,
−
Elektronika Praktyczna,
−
Elektronika,
−
Pomiary Automatyka Kontrola,
−
Pomiary Automatyka Robotyka.
Rozporządzenia i normy z zakresu bezpieczeństwa i higieny pracy
Wyszukiwarka
Podobne podstrony:
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 03 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 02 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 02 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 03 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z3 01 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 04 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 01 u
więcej podobnych podstron