POLITECHNIKA GDA
Ń
SKA
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI
KATEDRA ENERGOELEKTRONIKI I MASZYN ELEKTRYCZNYCH
L AB O R AT O R I U M
M AS Z Y N Y E L E K T R Y C Z N E
Ć
WICZENIE (MPS)
MASZYNY PR
Ą
DU STAŁEGO
SILNIK OBCOWZBUDNY
BADANIE CHARAKTERYSTYK
Materiały pomocnicze
Kierunek Elektrotechnika
Studia stacjonarne 1-szego stopnia
semestr 3
Opracowali
Mieczysław Ronkowski
Grzegorz Kostro
Michał Michna
Gda
ń
sk 2012-2013

M. Ronkowski,
G. Kostro, M. Michna
2
Maszyny prądu stałego
3
ĆWICZENIE (MPS)
MASZYNY PR
ĄDU STAŁEGO
BADANIE CHARAKTERYSTYK SILNIKA OBCOWZBUDNEGO
Program i cel
ć
wiczenia
1.
TEORIA.................................................................................................................................................................. 3
1.1.
Budowa, działanie, model fizyczny i model obwodowy silnika prądu stałego ................................................... 3
1.2.
Schematy połączeń uzwojeń silnika prądu stałego (obcowzbudnego) ................................................................ 7
1.3.
Charakterystyka magnesowania silnika prądu stałego (obcowzbudnego)........................................................... 7
1.4.
Równania charakterystyk elektromechanicznych i mechanicznych silnika prądu stałego (obcowzbudnego) ..... 8
1.5.
Kształtowanie charakterystyk elektromechanicznych i mechanicznych silnika prądu stałego (obcowzbudnego)9
2.
BADANIA ............................................................................................................................................................ 10
2.1.
Oględziny zewnętrzne....................................................................................................................................... 10
Dane znamionowe silnika/prądnicy .................................................................................................................................. 10
2.2.
Pomiary rezystancji uzwojeń ............................................................................................................................ 10
2.3.
Charakterystyka magnesowania ........................................................................................................................ 11
2.4.
Charakterystyki mechaniczne............................................................................................................................ 13
3.
ZADANIA ............................................................................................................................................................ 15
4.
PYTANIA KONTROLNE.................................................................................................................................... 16
5.
LITERATURA POMOCNICZA .......................................................................................................................... 16
1.
TEORIA
1.1. Budowa, działanie, model fizyczny i model obwodowy silnika pr
ą
du stałego
Podstawowy opis teorii maszyn prądu stałego (MPS) zawiera rozdz. 5 e-skryptu: Ronkowski M.,
Michna M., Kostro G., Kutt F.: Maszyny elektryczne wokół nas: zastosowanie, budowa, modelowanie,
charakterystyki, projektowanie. Wyd. PG, Gdańsk, 2011.
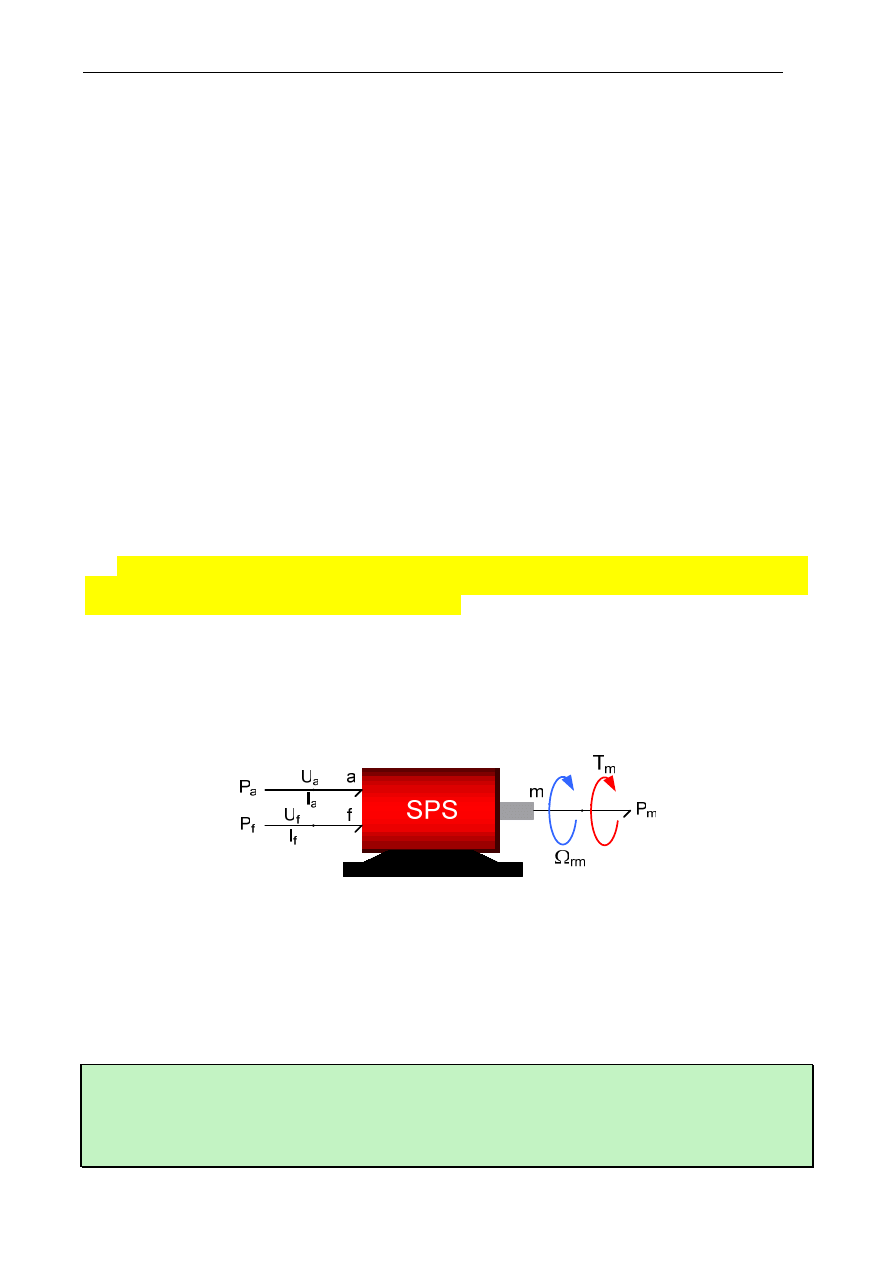
Silnik prądu stałego (SPS) jest przetwornikiem elektromechanicznym (rys. 1.1) o trzech wrotach
(parach zacisków), które fizycznie reprezentują: dwa „wejścia elektryczne” – zaciski uzwojenia twornika
„a” i zaciski uzwojenia wzbudzenia „f”; jedno „wyjście mechaniczne” „m” – koniec wału (sprzęgło). Moc
elektryczna (dostarczana) P
a
i moc mechaniczna (odbierana) P
m
ulegają przemianie elektromechanicznej za
pośrednictwem pola magnetycznego (wzbudzanego prądem I
f
). Energia pola magnetycznego jest energią
wewnętrzną silnika, gdyż przetwornik nie ma możliwości wymiany tej energii z otoczeniem.
Rys. 1.1. Silnik prądu stałego – trójwrotowy przetwornik elektromechaniczny:
wrota (zaciski) obwodu twornika „a” – dopływ energii elektrycznej przetwarzanej ma energię
mechaniczną, wrota obwodu wzbudnika (wzbudzenia) „f” – dopływ energii pola wzbudzenia,
wrota układu (obwodu) mechanicznego „m” – odpływ energii mechanicznej
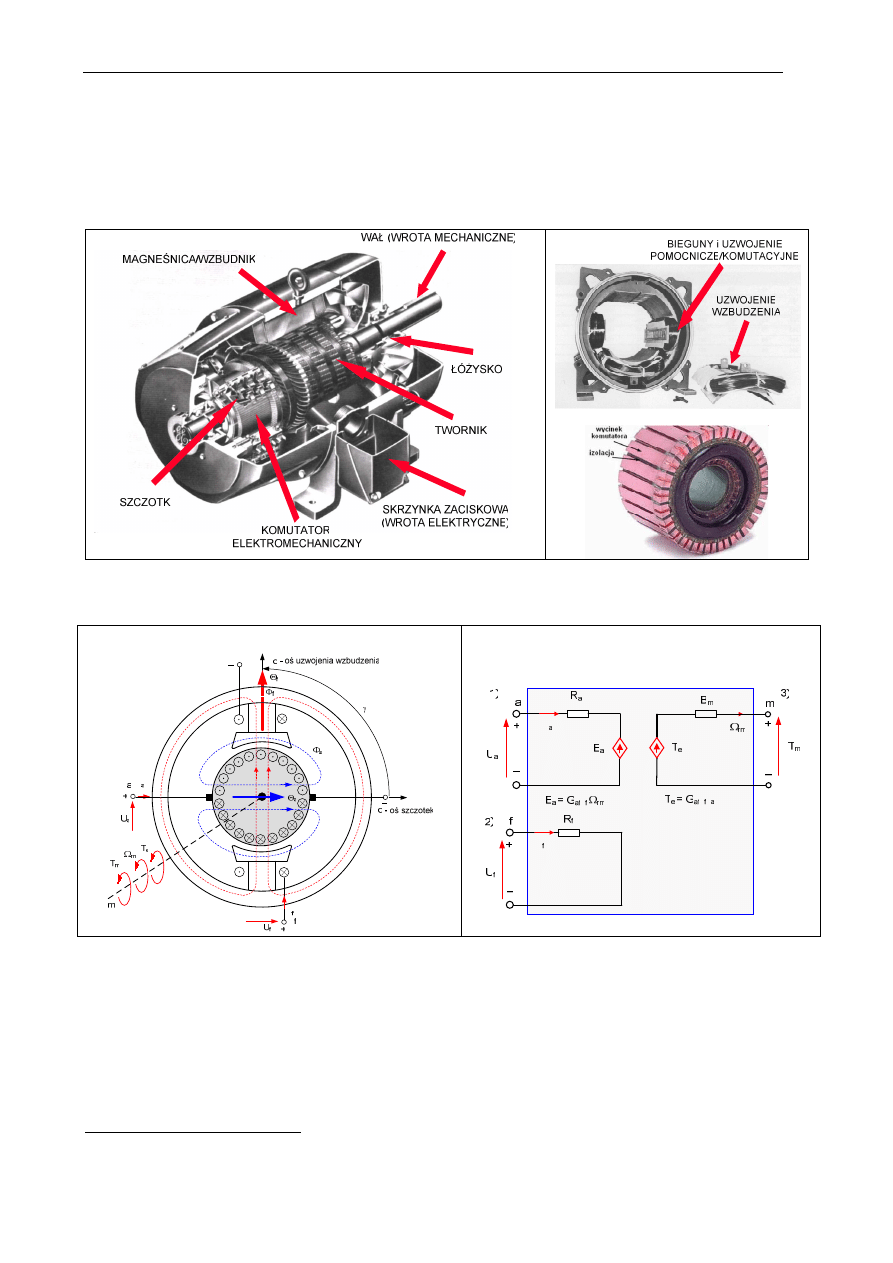
Budowę i podstawowe elementy SPS przedstawiono na rys. 1.2. Silnik składa się z następujących
elementów czynnych: wzbudnika/magneśnicy (uzwojenie wzbudzenia, bieguny główne, nabiegunniki,
jarzmo); twornika (uzwojenie twornika, rdzeń twornika, komutator, szczotki); wału.
Uwaga: W SPS, celem poprawy komutacji (eliminacja iskrzenia szczotek), stosuje się dodatkowo bieguny
komutacyjne
(pomocnicze) umieszczone między biegunami głównymi. Na biegunach
komutacyjnych nawinięte jest uzwojenie komutacyjne połączone szeregowo z uzwojeniem twornika.
W SPS dużej mocy, celem kompensacji oddziaływania twornika, stosuje się dodatkowo uzwojenie
kompensacyjne – umieszczone w żłobkach nabiegunników biegunów głównych
.
M. Ronkowski,
G. Kostro, M. Michna
4
Układ elektromechaniczny na rys. 1.3 przedstawia schematycznie budowę elementarnego SPS wraz
z ilustracją zasady jego działania. Podstawą działania silnika jest generacja pary sił Lorentza F
L
, które
działają na przewody tworzące uzwojenie (cewkę) a-a’ twornika, przez które płynie prąd i
a-a’
.
Dwuwycinkowy komutator sprawia, że zwrot pary sił Lorentza nie zależy od położenia kątowego cewki a-a’
(porównaj rys. 1.3a i rys. 1.3b). W efekcie para sił Lorentza generuje jednokierunkowy moment
elektromagnetyczny T
e
– wartość średnia użytecznego momentu dla pełnego obrotu wirnika jest różna od
zera (
0
≠≠≠≠
śr
e
T
).
KOMUTATOR
Rys. 1.2. Budowa i podstawowe elementy silnika prądu stałego
Uproszczony model fizyczny i obwodowy SPS przedstawiono na rys. 1.3.
a)
b)
Rys. 1.3. Podstawowe modele silnika prądu stałego:
a) model fizyczny – zjawisko generacji nieruchomego przepływu twornika
Θ
Θ
Θ
Θ
a
w osi q prostopadłej do osi
pola wzbudnika (wzbudzenia) d
b) model obwodowy – 1) obwód twornika, 2) obwód wzbudzenia, 3) obwód mechaniczny – analog
elektryczny układu mechanicznego
Wielocewkowe uzwojenie twornika SPS, odpowiednio połączone z wycinkami komutatora,
wytwarza przepływ (magnetyczny)
Θ
Θ
Θ
Θ
a
, który jest nieruchomy
1
względem przepływu wzbudzenia
Θ
Θ
Θ
Θ
f
. W SPS
1
Uwaga: Przepływ twornika
Θ
Θ
Θ
Θ
a
jest ruchomy (wiruje) względem uzwojenia, które go wytwarza, tzn. przepływ twornika
wzbudza pole wirujące względem uzwojenia twornika. Komutator i szczotki sprawiają, że przepływ (pola) twornika
Θ
Θ
Θ
Θ
a
Maszyny prądu stałego
5
przygotowanym prawidłowo do eksploatacji, przepływ
Θ
Θ
Θ
Θ
a
skierowany jest wzdłuż osi szczotek (oś
oznaczona symbolem q) oraz prostopadle do osi wzbudzenia (oś oznaczona symbolem d), jak pokazano na
rys. 1.3a. Takie wzajemne położenie przepływów twornika
Θ
Θ
Θ
Θ
a
i wzbudzenia
Θ
Θ
Θ
Θ
f
– nieruchomych względem
siebie – sprawia, że podstawowe wielkości elektromechaniczne silnika (opisujące elektromechaniczne
przetwarzanie energii) można określić następującymi zależnościami:
•
moment elektromagnetyczny
a
f
T
e
I
k
T
Φ
====
(1.1)
•
SEM rotacji
rm
f
E
a
k
E
Ω
Φ
====
(1.2)
gdzie,
•
k
E
oraz k
T
– stała SEM rotacji i stała momentu elektromagnetycznego
2
;
•
Φ
Φ
Φ
Φ
f
– strumień główny (wzbudzenia, magnesowania), przypadający na jeden biegun wzbudnika
(podziałkę biegunową silnika);
•
I
a
– prąd twornika;
•
Ω
Ω
Ω
Ω
rm
– mechaniczna prędkość kątowa silnika (wirnika).
Relacja między prędkością kątową silnika
Ω
Ω
Ω
Ω
rm
– liczoną w [rad/s], a prędkością obrotową
silnika n – liczoną w [obr/min] jest następująca:
60
2
n
rm
π
Ω
====
(1.3)
Uwaga: Jeżeli w zależności (1.2) prędkość silnika wyrażona jest w [rad/s], to zachodzi równość
współczynników
k
E
= k
T
. W przypadku wyrażenia prędkości silnika w [obr/min]
60
/
2
π
T
E
k
k
====
.
Wprowadzając koncepcję indukcyjności rotacji G
af
, zdefiniowanej następująco:
f
f
E
def
af
I
k
G
Φ
====
(1.4)
f
f
T
def
af
I
k
G
Φ
====
(1.5)
zależności (1.1) i (1.2) można zapisać w postaci:
rm
f
af
a
I
G
E
Ω
====
(1.6)
a
f
af
e
I
I
G
T
====
(1.7)
Opisanie twornika (wirnika) z uzwojeniem komutatorowym jako elementu, w którym prąd twornika
wytwarza nieruchomy w przestrzeni przepływ
Θ
Θ
Θ
Θ
a
(strumień
Φ
Φ
Φ
Φ
a
), pozwala odwzorować model fizyczny SPS
(rys. 1.3a) w statycznych stanach pracy za pomocą modelu obwodowego na rys. 1.3b. Wielkości
elektromechaniczne: SEM rotacji E
a
i moment elektromagnetyczny T
e
reprezentują sterowane źródła
napięciowe
3
oznaczone symbolem
. Straty w obwodach elektrycznych odwzorowują rezystancje: R
a
–
twornika i R
f
– wzbudzania, a straty w obwodzie mechanicznym współczynnik tarcia lepkiego B
m
.
Model obwodowy SPS na rys. 1.3b opisuje następujący układ równań algebraicznych:
•
równanie równowagi obwodu twornika
a
a
a
a
E
I
R
U
++++
====
(1.8)
•
równanie równowagi obwodu wzbudzenia
jest nieruchomy względem przepływu (pola) wzbudzenia
Θ
Θ
Θ
Θ
f
. Komutator pełni funkcję regulatora położenia pola
twornika względem pola magneśnicy.
2
Stałe k
E
oraz k
T
nazywane są często „stałymi konstrukcyjnymi” maszyny prądu stałego, gdyż ich wartości zależą od
wymiarów rdzenia twornika (długości i średnicy) i parametrów uzwojenia twornika (liczby boków uzwojenia, par gałęzi
równoległych i par biegunów).
3
W modelu obwodowym układu mechanicznego przyjęto analogie: napięcie – moment obrotowy, prąd – prędkość
kątowa, rezystancja – współczynnik tarcia lepkiego.
M. Ronkowski,
G. Kostro, M. Michna
6
f
f
f
I
R
U
====
(1.9)
•
równanie równowagi układu (obwodu) mechanicznego
m
rm
m
e
T
B
T
++++
====
Ω
(1.10)
gdzie,
U
a
, U
f
– napięcia zasilania obwodu twornika i wzbudzenia,
I
a
, I
f
– prądy obwodu twornika i wzbudzenia,
T
m
– moment użyteczny (zewnętrzny) na wale silnika (moment T
e
pomniejszy o straty tarcia i
wentylacji).
Zależności na moce poszczególnych wrót, dla założonego modelu SPS (rys. 1.3b), opisują
następujące wzory:
•
moc doprowadzona do obwodu twornika silnika
a
a
a
I
U
P
====
(1.11)
•
moc doprowadzona do obwodu wzbudzenia silnika
f
f
f
I
U
P
====
(1.12)
•
moc odprowadzona z wału silnika – użyteczna moc mechaniczna silnika
rm
m
m
T
P
Ω
====
(1.13)
Uwaga: Moc znamionowa SPS P
n
jest użyteczną mocą mechaniczną – mocą odprowadzoną z jego wału do
napędzanej maszyny roboczej.
Moc wzbudzenia P
f
stanowi (0,5 – 1,5)% mocy znamionowej P
n
silnika.
Energia wzbudzenia SPS nie ulega przetworzeniu na energię mechaniczną – zamienia się na energię
cieplną wydzielaną w uzwojeniu (obwodzie) wzbudzenia.
Dla SPS, zgodnie z przyjętymi założeniami upraszczającymi do budowy jego modelu obwodowego,
zachodzą następujące równość przetwarzanych mocy na drodze elektromechanicznej:
•
wewnętrzna moc elektryczna
a
rm
f
af
a
a
e
I
I
G
I
E
P
)
(
Ω
====
====
(1.14)
•
wewnętrzna moc mechaniczna
rm
a
f
af
rm
e
m
I
I
G
T
P
Ω
Ω
)
(
====
====
′′′′
(1.15)
zatem zachodzi równość
m
e
P
P
′′′′
====
(1.16)
Stąd, SEM rotacji E
a
można interpretować jak miarę mocy elektrycznej przetwarzanej na moc mechaniczną.
Wartości mocy w zależnościach (1.14) i (1.15) można wyznaczyć następująco:
2
a
a
a
a
a
e
I
R
P
P
P
P
−−−−
====
−−−−
====
∆
(1.17)
2
rm
m
m
m
m
m
B
P
P
P
P
Ω
∆
−−−−
′′′′
====
−−−−
′′′′
====
(1.18)
gdzie,
a
P
∆
– straty w obwodzie twornika (uzwojenia obwodu twornika i zestyk ślizgowy),
m
P
∆
– straty
mechaniczne (tarcie i wentylacja).
Znamionowe straty mechaniczne
mn
P
∆
oraz odwzorowujący je współczynnik tarcia lepkiego B
m
można
oszacować następująco:
n
mn
P
P
100
)%
1
...
3
,
0
(
≅
∆
(1.19)
2
mn
r
mn
m
P
B
Ω
∆
≅
[Nm
⋅
s/rad]
(1.20)
Sprawność SPS, zgodnie z przyjętym modelem, opisują zależności:
100
1
100
100
100
1
2
P
P
P
P
P
P
P
P
P
P
P
m
m
m
f
a
m
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
Σ∆
++++
−−−−
====
++++
====
++++
====
====
η
(1.21)
gdzie, P
1
– moc pobrana przez silnik, P
2
– moc oddana przez silnik,
m
P
Σ∆
– sumaryczne straty w silniku.
Maszyny prądu stałego
7
1.2. Schematy poł
ą
cze
ń
uzwoje
ń
silnika pr
ą
du stałego (obcowzbudnego)
Obcowzbudny silnik prądu stałego ma dwa niezależne obwody elektryczne, które zasilają dwa
oddzielne źródła napięcia stałego: obwód twornika i obwód wzbudzenia (rys. 1.4).
a)
c)
b)
d)
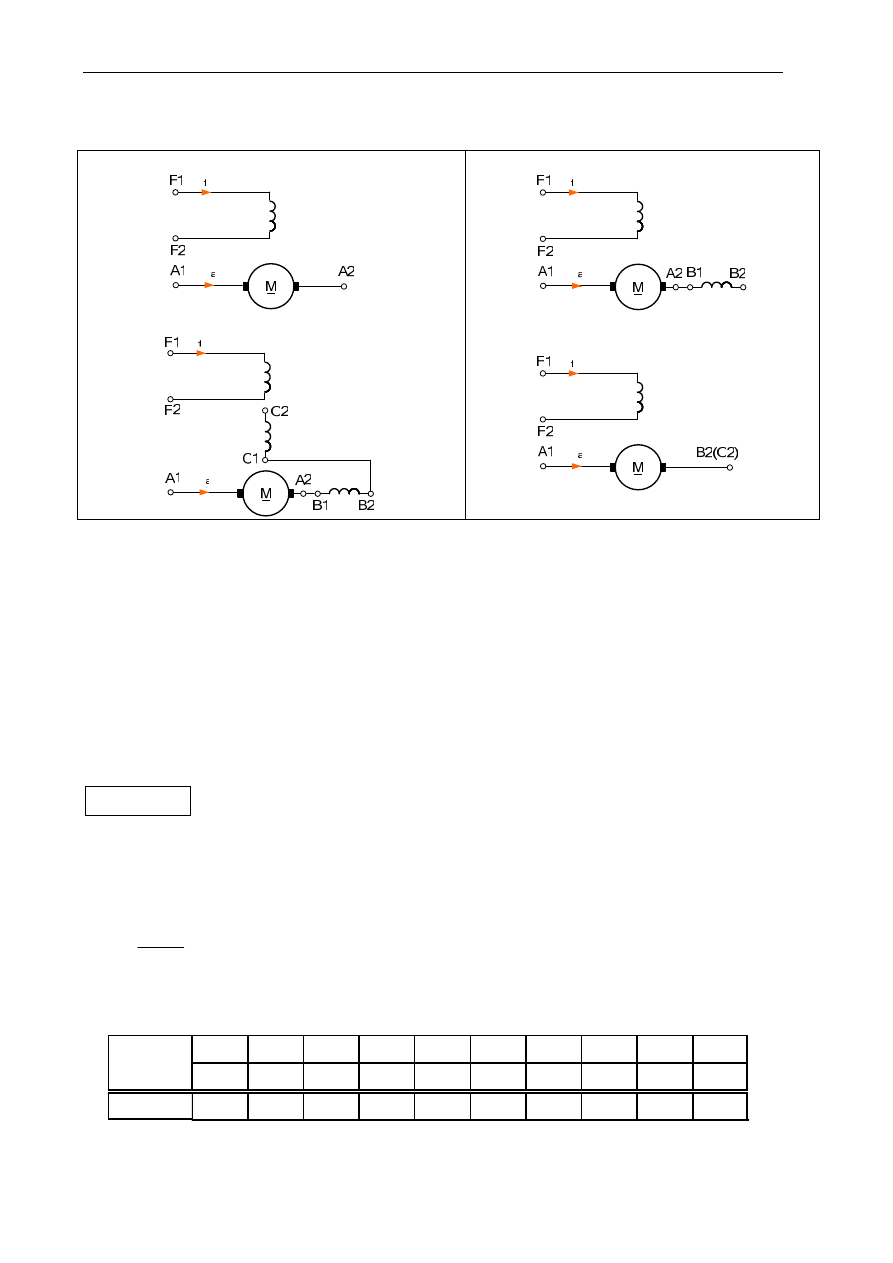
Rys. 1.4. Schematy połączeń uzwojeń obcowzbudnego silnika prądu stałego:
a) układ podstawowy, b) silnik z uzwojeniem pomocniczym (komutacyjnym), b) silnik z uzwojeniem
kompensacyjnym, d) uproszczony schemat połączeń silnika
Podstawowymi uzwojeniami silnika są: uzwojenie twornika (Al, A2) i uzwojenie wzbudzenia (F1,
F2). Przy czym, litera A oznacza uzwojenie twornika, litera F – uzwojenie wzbudzenia, liczba „1” oznacza
umowny początek uzwojenia, liczba „2” – umowny koniec uzwojenia. W celu zapewnienia poprawnej
komutacji stosuje się uzwojenie pomocnicze/komutacyjne (Bl, B2), a w silnikach większej mocy do
kompensacji oddziaływania twornika – uzwojenie kompensacyjne (Cl, C2). Przy czym, uzwojenia
komutacyjne i kompensacyjne są łączone szeregowo z uzwojeniem twornika.
1.3. Charakterystyka magnesowania silnika pr
ą
du stałego (obcowzbudnego)
Charakterystyka magnesowania silnika (rys. 1.6a) określona jest funkcją:
)
(
0
0
f
a
a
I
E
E
=
(1.22)
przy
const
rm
====
Ω
oraz I
a
= 0
a jej kształt odpowiada krzywej magnesowania
)
(H
B
B
====
materiałów ferromagnetycznych użytych do
budowy obwodu magnetycznego silnika, z uwzględnieniem szczeliny roboczej (powietrznej) silnika. W
oparciu o równanie (1.6) i wyznaczoną pomiarowo charakterystykę magnesowania SPS wyznacza się
wartości indukcyjności rotacji:
rm
f
a
af
I
E
G
Ω
=
0
0
(1.23)
Znamionową wartość indukcji rotacji można wyznaczyć na podstawie danych katalogowych SPS. Dla
przykładu wyznaczymy jej wartość dla obcowzbudnego SPS produkcji firmy SIEMENS o następujących
danych katalogowych:
Wielko
ść
U
an
n
n
P
n
J
I
an
η
n
P
fn
U
fn
R
a
L
aa
mechaniczna
V
obr/min
kW
kgm
2
A
%
W
V
Ω
mH
225L
440
2300
38,0
0,65
94,0
90,4
650
310
0,15
2,3
Wartość znamionowa SEM rotacji silnika, zgodnie z równaniem (1.8), wynosi
M. Ronkowski,
G. Kostro, M. Michna
8
V
7
,
425
0
,
94
15
,
0
440
≅≅≅≅
⋅⋅⋅⋅
−−−−
====
−−−−
====
an
a
an
an
I
R
U
E
Wartość znamionowa prądu wzbudzenia, odpowiadająca wartości znamionowej SEM E
an
, wynosi
A
096
,
2
310
650
≅≅≅≅
====
====
fn
fn
fn
U
P
I
Wartość znamionowa indukcyjności rotacji silnika, zgodnie z równaniem (1.21), wynosi
mH
34
,
843
86
,
240
096
,
2
7
,
425
≅≅≅≅
⋅⋅⋅⋅
====
====
rm
fn
an
afn
I
E
G
Ω
gdzie, wg wzoru (1.3), wartość znamionowej prędkości kątowej silnika wynosi
rad/s
600
86
,
240
60
2
2
60
2
≅≅≅≅
⋅⋅⋅⋅
====
====
π
π
Ω
n
rmn
n
1.4.
Równania charakterystyk elektromechanicznych i mechanicznych silnika
pr
ą
du
stałego
(obcowzbudnego)
Definiuje się następujące charakterystyki ruchowe SPS dla stanu ustalonego:
•
charakterystyka elektromechaniczna
)
(
a
rm
rm
I
Ω
Ω
====
(1.24)
•
charakterystyka mechaniczna
)
(
e
rm
rm
T
Ω
Ω
====
(1.25)
przy założeniu określonych warunków zasilania i obciążenia silnika. Charakterystyki te określają
zachowanie silnika w stanach pracy ustalonej – nazywane są charakterystykami statycznymi silnika.
Przekształcając
odpowiednio
równania
(1.5)–(1.9)
uzyskujemy
następujące
zależności
odwzorowujące charakterystyki ruchowe SPS:
•
elektromechaniczna
a
f
af
a
f
af
a
rm
I
I
G
R
I
G
U
)
(
)
(
−
=
Ω
(1.26)
•
mechaniczna
e
f
af
a
f
af
a
rm
T
I
G
R
I
G
U
2
)
(
)
(
−
=
Ω
(1.27)
W oparciu o zależności (1.26) i (1.27) definiuje się następujące wielkości ruchowe SPS:
•
prędkość kątowa idealnego biegu jałowego
)
(
0
f
af
a
i
rm
I
G
U
=
Ω
(1.28)
przy I
a
→ 0
oraz
•
prąd rozruchowy
a
a
ar
R
U
I
=
(1.29)
•
moment rozruchowy
a
a
f
af
er
R
U
I
G
T
)
(
=
(1.30)
przy
0
====
rm
Ω
Celem ograniczenia prądu rozruchowego obniża się napięcia zasilania twornika w stosunku do napięcia
znamionowego (U
a
< U
an
) lub włącza się dodatkową (rozruchową) rezystancję R
ad
, tak aby prąd rozruchowy
spełniał nierówność:
an
ar
I
I
2
≤≤≤≤
(1.31)
gdzie, I
an
– prąd znamionowy twornika.
Zatem
Maszyny prądu stałego
9
•
wartość napięcia rozruchowego
an
a
ar
I
R
U
2
≤
(1.32)
•
wartość rezystancji rozruchowej
a
I
U
ad
R
R
an
an
−−−−
≥≥≥≥
2
(1.33)
•
wartość przybliżona rezystancji rozruchowej
an
an
I
U
ad
R
2
≥≥≥≥
(1.34
1.5. Kształtowanie charakterystyk elektromechanicznych i mechanicznych
silnika pr
ą
du stałego (obcowzbudnego)
Z równań (l.26) i (l.27) wynikają następujące metody kształtowania charakterystyk
elektromechanicznych i mechanicznych silnika:
a) sterowanie przez zmianę wartości napięcia U
a
zasilania obwodu twornika;
b) sterowanie przez zmianę wartości prądu I
f
(strumienia) wzbudzenia;
c) sterowanie przez zmianę wartości rezystancji dodatkowej R
ad
w obwodzie twornika.
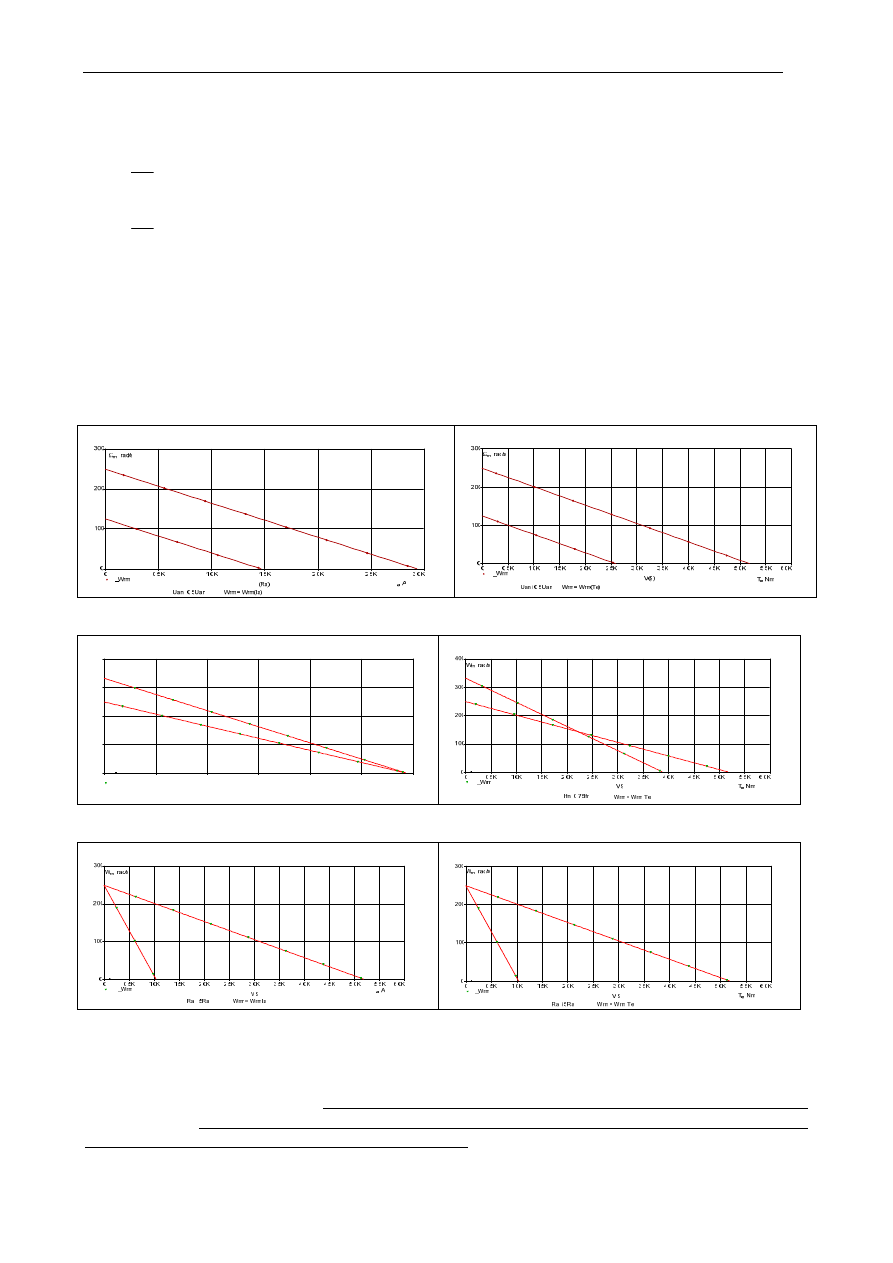
Przykładowe, idealizowane charakterystyki obcowzbudnego SPS przedstawiono na rys. 1.5.
a)
d)
Sterowanie przez zmianę wartości napięcia U
a
przy I
f
= const, R
ad
= 0
b)
I(Ra)
0
0.5K
1.0K
1.5K
2.0K
2.5K
3.0K
I_Wrm
0
100
200
300
400
Ifn i 0.75Ifn
Wrm = Wrm(Ia)
I
a
[A]
W
rm
[rad/s]
e)
Sterowanie przez zmianę wartości prądu I
f
przy U
a
= const, R
ad
= 0
c)
f)
Sterowanie przez zmianę wartości rezystancji dodatkowej R
ad
przy U
a
= const, I
f
= const
Rys. 1.5. Przykładowe charakterystyki (idealizowane) obcowzbudnego silnika prądu stałego i metody ich
kształtowania: a), b) oraz c) elektromechaniczne d), e) oraz f) mechaniczne
Przedstawione na rys. 1.6 są charakterystykami idealizowanymi, gdyż wyznaczającą je zależność
(l.26) i (l.27), które sformułowano przy założeniach upraszczających: pominięto nasycenia obwodu
magnetycznego oraz zjawisko oddziaływania twornika. Ich wykresy sporządzono za pomocą programu
symulacji obwodów elektrycznych PSpice.
M. Ronkowski,
G. Kostro, M. Michna
10
2.
BADANIA
2.1. Ogl
ę
dziny zewn
ę
trzne
Dokonujemy oględzin zewnętrznych badanego zespołu maszyn prądu stałego i urządzeń,
wchodzących w skład układu pomiarowego i zasilania. Dokładnie odczytujemy i notujemy w tab. 2.1 dane
zawarte na tabliczkach znamionowych obu maszyn wchodzących w skład badanego zespołu.
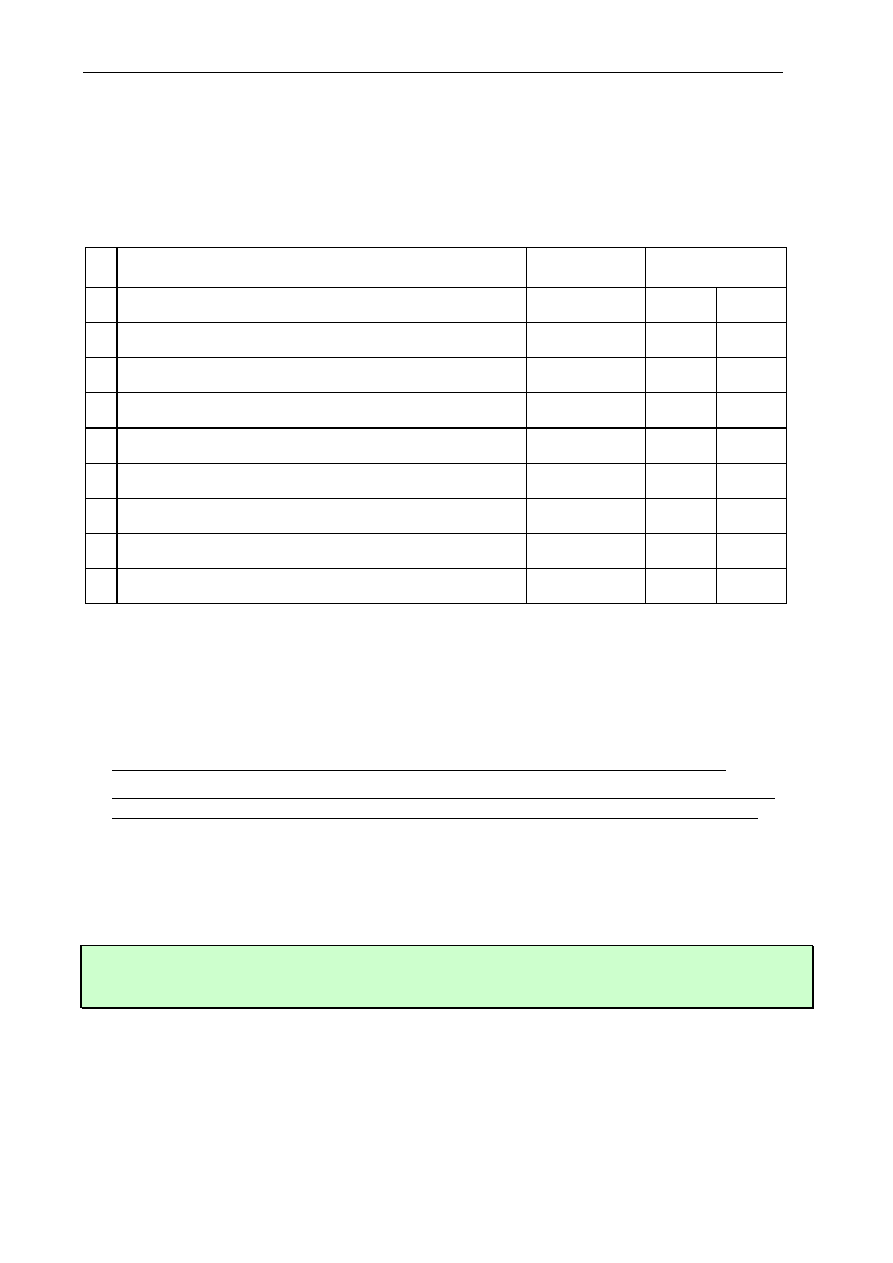
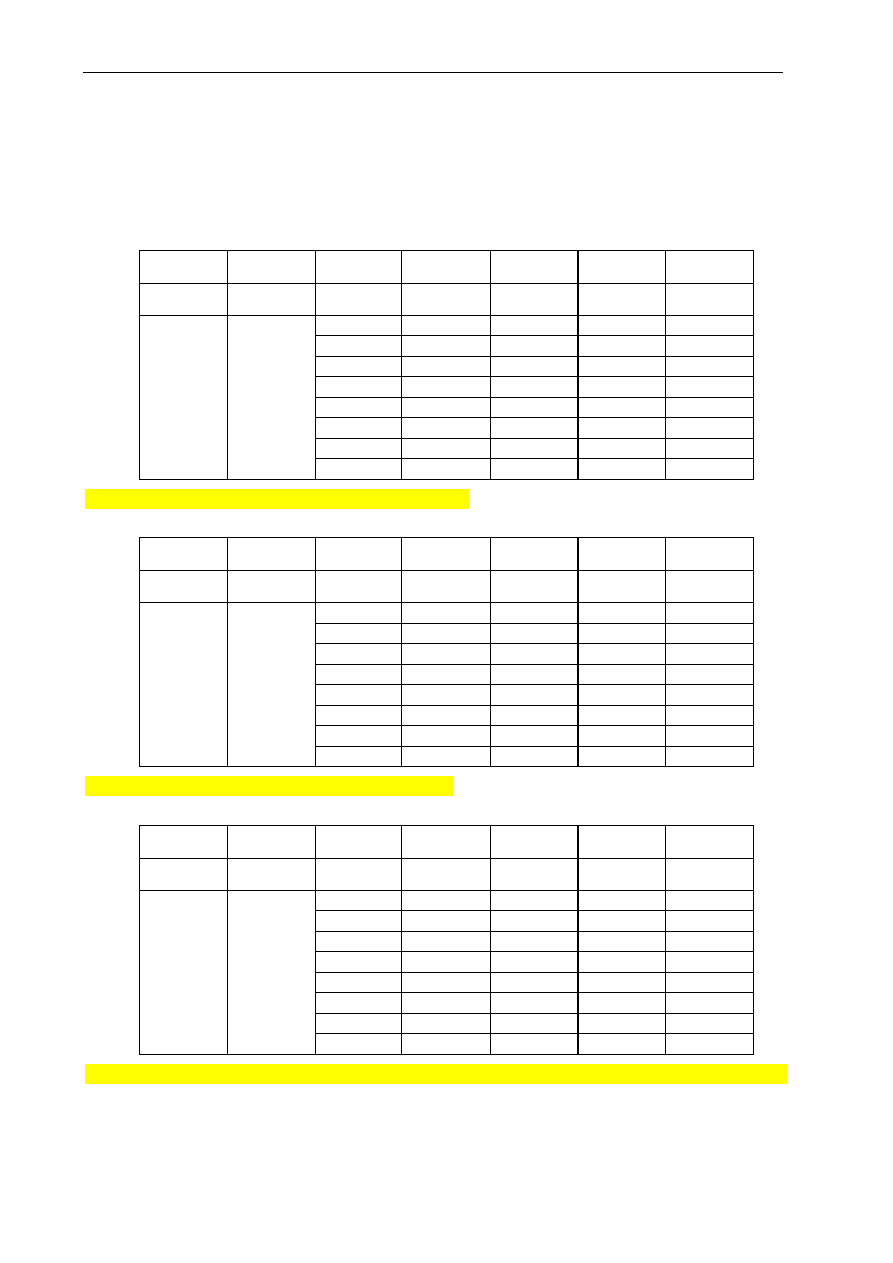
Tabela 2.1 Dane znamionowe maszyn prądu stałego badanego zespołu
Lp
.
Dane znamionowe silnika/prądnicy
Jednostka
Wartość
silnik/prądnica
1. Nazwa i typ wyrobu
-
2. Moc znamionowa P
n
kW
3. Rodzaj pracy
-
4. Napięcie twornika U
an
V
5. Prąd twornika I
an
A
6. Prędkość obrotowa nn
obr/min
Rodzaj wzbudzenia
-
7. Napięcie wzbudzenia U
fn
V
8. Prąd wzbudzenia I
fn
A
2.2. Pomiary rezystancji uzwoje
ń
•
Przebieg pomiaru rezystancji uzwojeń.
Zasady pomiaru rezystancji uzwojeń.
•
Pomiary wykonujemy metodą techniczną zarówno dla prądnicy jak i silnika.
•
Dobieramy odpowiednie zakresy mierników:
amperomierzy - podstawą doboru są: prądy znamionowe w obwodzie twornika i wzbudzenia;
woltomierzy - podstawą doboru są: spodziewane wartości spadku napięcia na rezystancji uzwojeniu
twornika dla prądu znamionowego oraz wartość napięcia znamionowego uzwojenia wzbudzenia.
•
Pomiar rezystancji uzwojenia wzbudzenia wykonujemy dla trzech wartości prądu.
Wyniki pomiarów notujemy w tabeli 2.2a.
•
Pomiar rezystancji uzwojeń obwodu twornika wykonujemy dla minimum 5 wartości prądu, zmieniając
jego wartość od 10% do minimum 50% I
an
(lub w odwrotnej kolejności).
Uwaga:
Pomiary rezystancji uzwojeń obwodu twornika wykonujemy możliwie szybko, aby zminimalizować
skutki nadmiernego nagrzania się (wypalania) zestyku szczotka – komutator.
Wyniki pomiarów notujemy w tab. 2.2b.
Maszyny prądu stałego
11
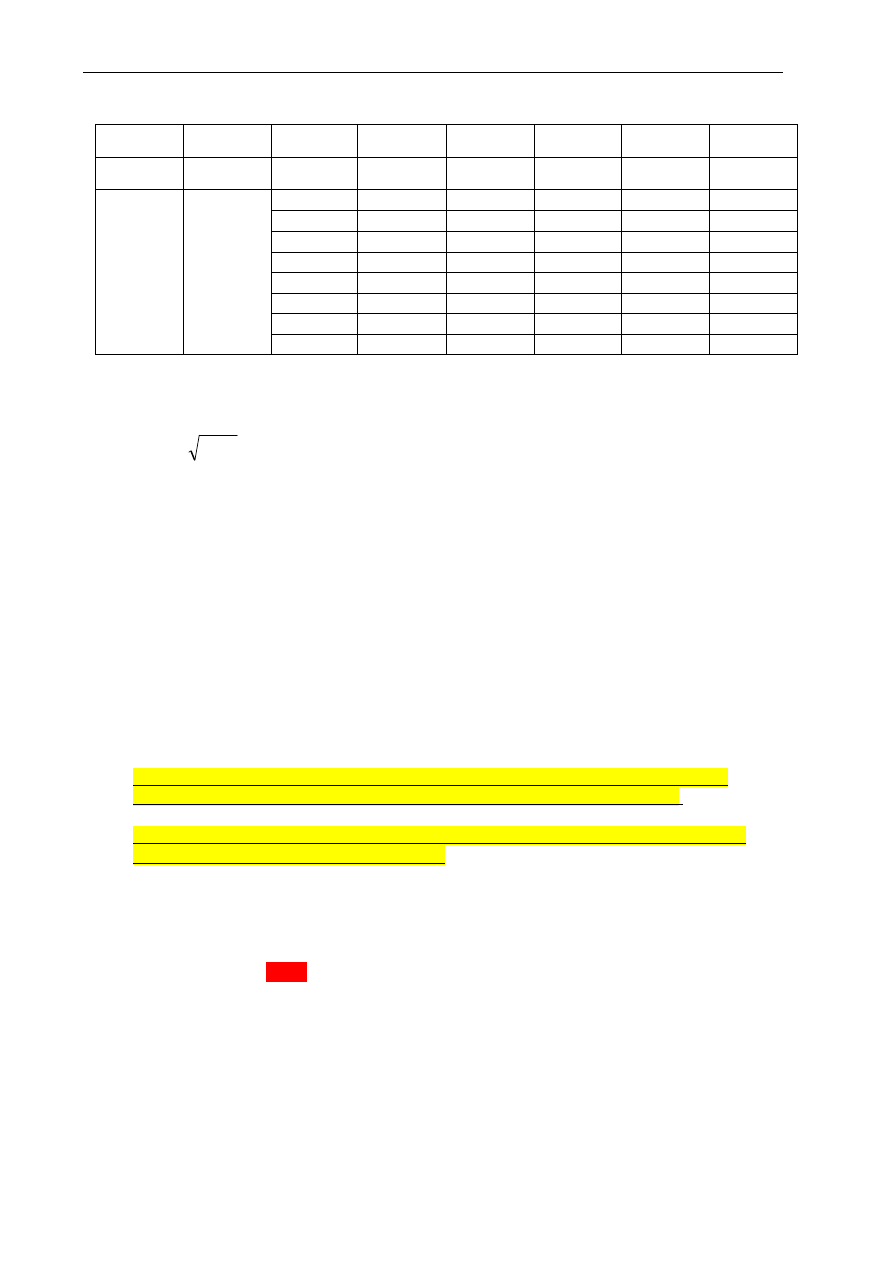
Tabela 2.2.a Pomiar rezystancji uzwojeń wzbudzenia
Lp.
Maszyna
U
f
I
f
Obliczenia: R
f
V
A
Ω
1
prądnica
2
3
Wartość średnia Rf =
1
silnik
2
3
Wartość średnia Rf =
Tabela 2.2.b Pomiar rezystancji uzwojeń twornika
Lp. Maszyna
Ua
Ia
Obliczenia: Ra
V
A
Ω
prądnica
silnik
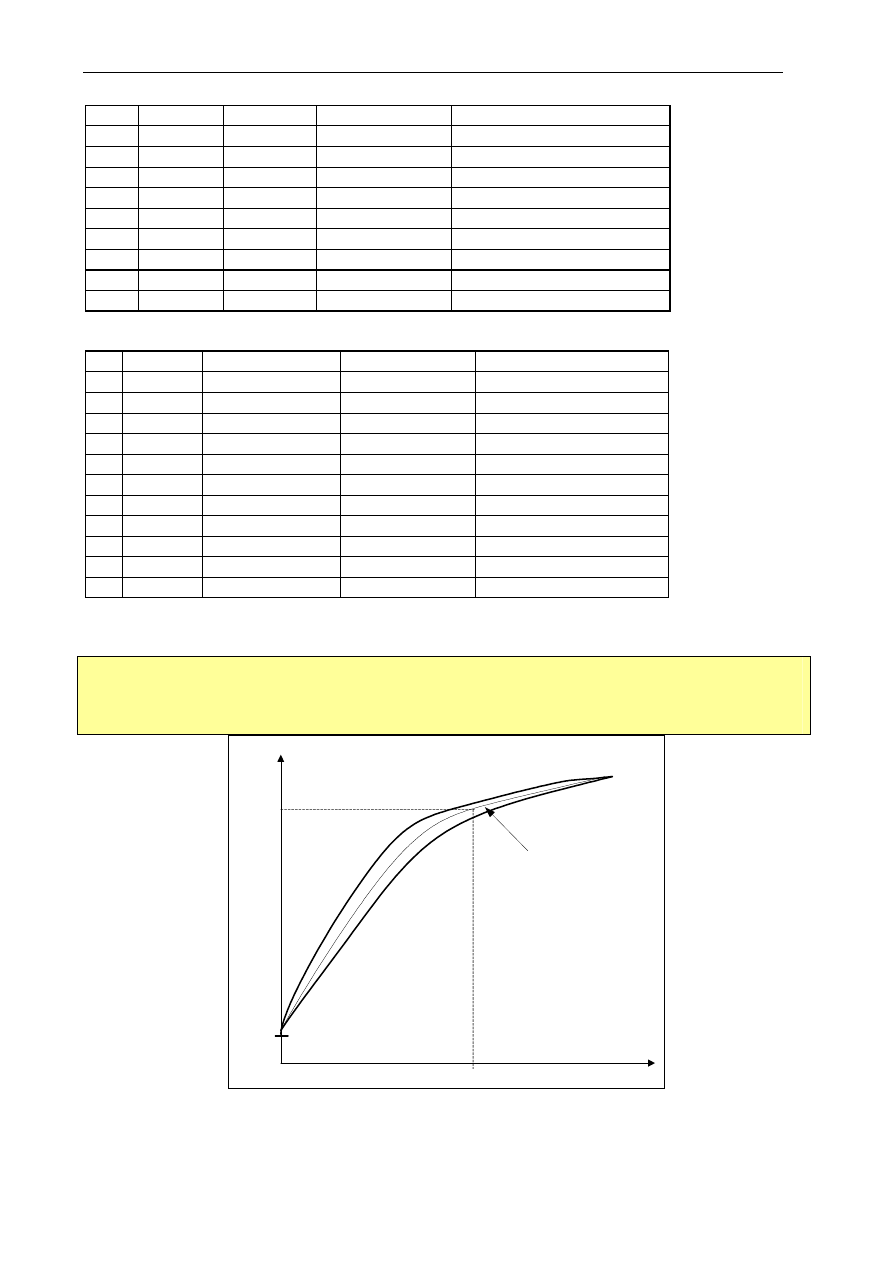
2.3. Charakterystyka magnesowania
Charakterystyka magnesowania (rys. 2.1) przedstawia zależność:
SEM rotacji E
a0
uzwojenia twornika od prądu wzbudzenia I
f
przy stałej prędkości obrotowej (n = const)
i nieobciążonym (otwartym) obwodzie twornika (I
a
= 0, U
a0
= E
a0
).
I
f
[A]
0
E
a0
[V]
E
a0sz
E
a0n
I
fn
Uśredniona charakterystyka
magnesowania
Rys. 2.1. Charakterystyka magnesowania silnika prądu stałego
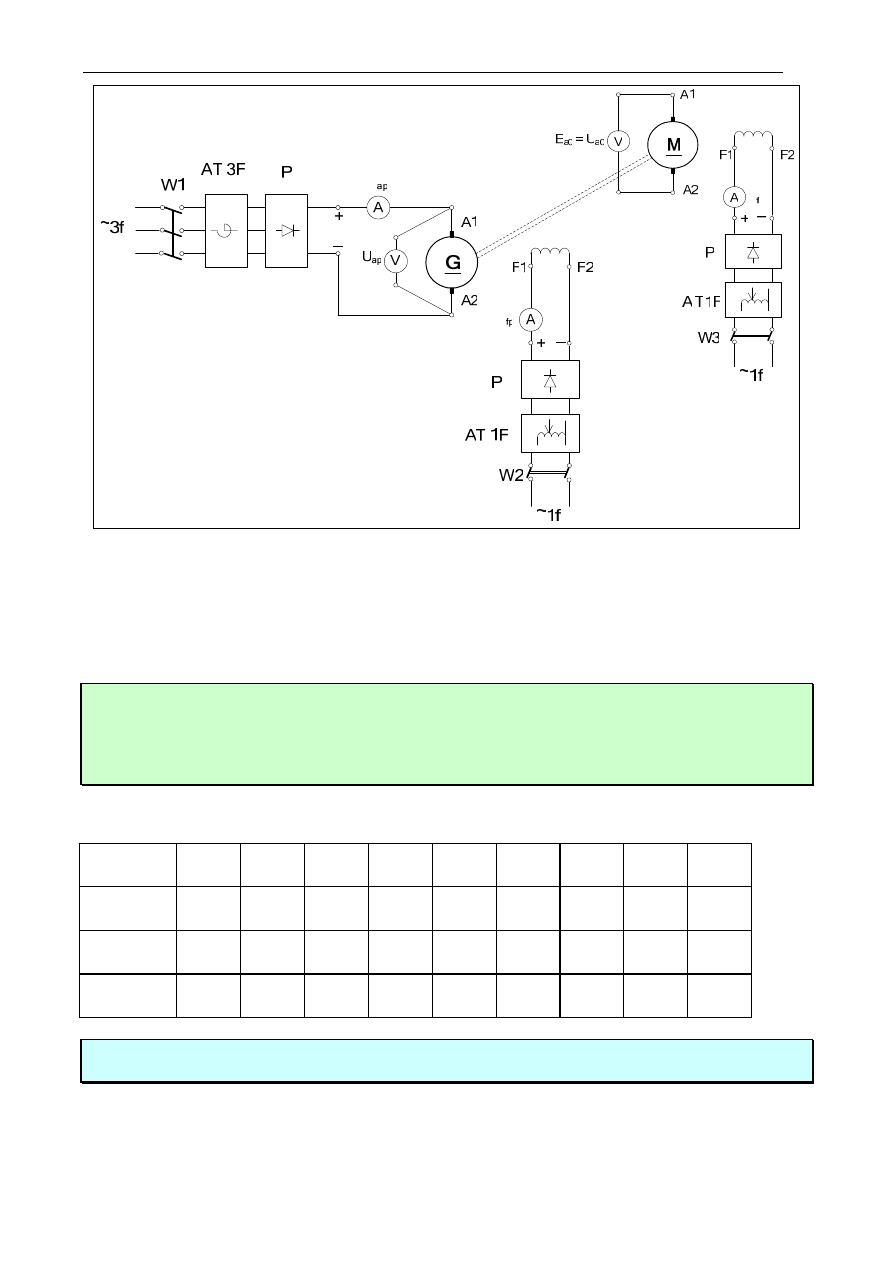
Schemat układu do pomiaru charakterystyki magnesowania obcowzbudnego silnika prądu stałego
przedstawiono na rys. 2.2. Każda z badanych maszyn może pełnić zarówno rolę prądnicy jak i silnika,
zależnie od sposobu jej zasilania bądź obciążenia.
M. Ronkowski,
G. Kostro, M. Michna
12
Rys. 2.2. Schemat układu do pomiaru charakterystyki magnesowania obcowzbudnego silnika prądu stałego
••••
Pomiar charakterystyki magnesowania
W trakcie pomiarów, utrzymując stałą prędkość obrotową maszyny (n = const), zmieniamy prąd
wzbudzenia I
f
maszyny napędzanej i jednocześnie notujemy wartość napięcia U
a0
na zaciskach obwodu
twornika (obwód twornika jest nieobciążony – otwarty: I
a
= 0, U
a0
= E
a0
).
Uwaga:
Należy stopniowo zwiększać wartość prąd wzbudzenia I
f
maszyny badanej, począwszy od wartości 0 do
wartości I
fmax
(nigdy nie należy zmniejszać wartości prądu wzbudzenia).
Następnie wartość prąd wzbudzenia I
f
należy stopniowo zmniejszać, począwszy od wartości I
fmax
do
wartości 0 (nigdy nie należy zwiększać wartości prądu wzbudzenia).
Wyniki pomiarów notujemy w tab. 2.3.
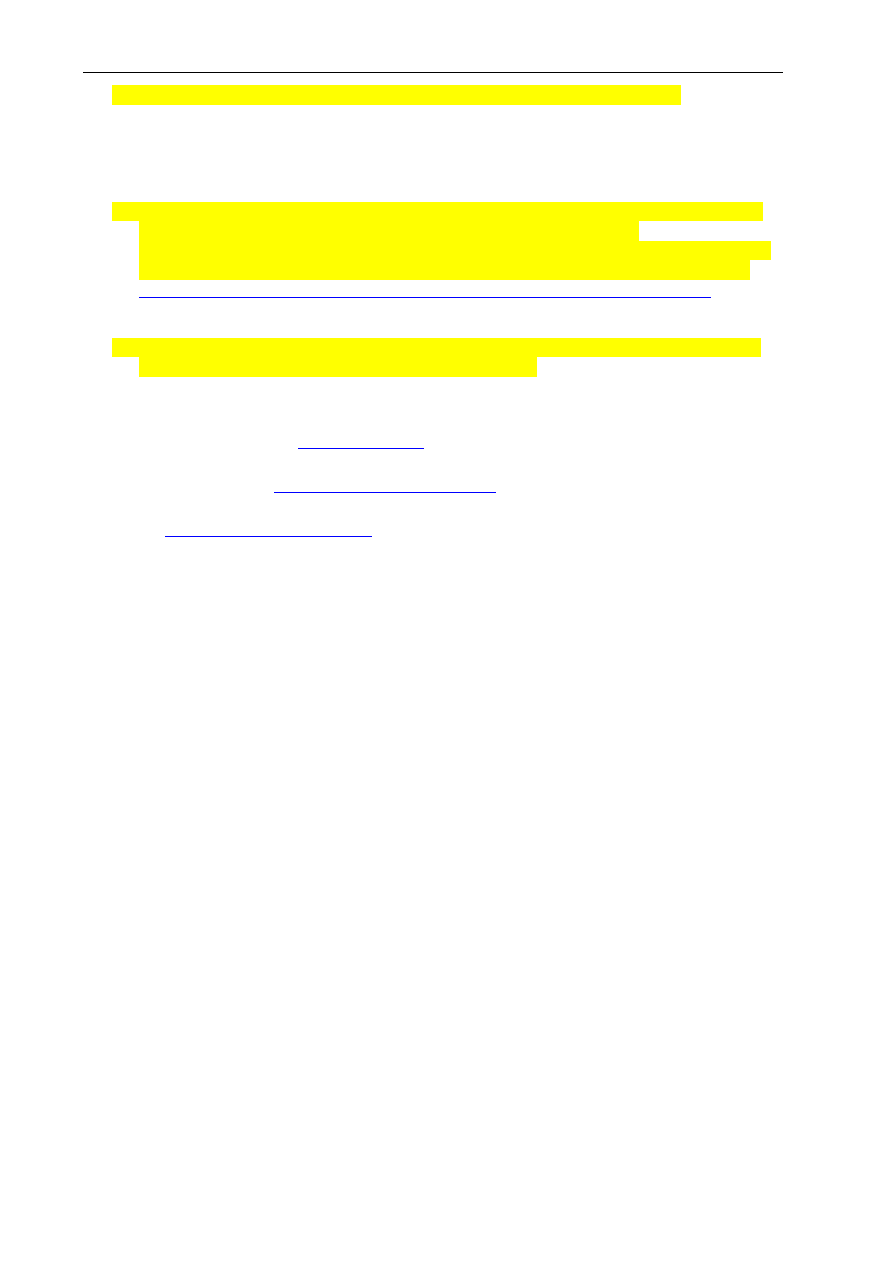
Tabela 2.3 Pomiar charakterystyki magnesowania obcowzbudnego silnika prądu stałego
I
f
[A]
↑
0
U
a0
/ E
a0
[V]
I
f
[A]
↓
0
U
a0
/ E
a0
[V]
Uwaga:
Prąd wzbudzenia I
fmax
odpowiada wartości przy której SEM E
a0
osiąga wartość 1,1U
an
.
Na podstawie charakterystyki magnesowania (wykreślonej na rys. 2.1) można ocenić materiały
użyte do budowy maszyny (szerokość pętli histerezy), wartości magnetyzmu szczątkowego, oraz stopień
nasycenia obwodu magnetycznego.
••••
Wyznaczenie charakterystyki indukcyjności rotacji G
af
Maszyny prądu stałego
13
Aby określić wartość indukcyjności rotacji G
af
korzystamy z pomierzonej charakterystyki
magnesowania maszyny. W tym celu należy dodatkowo wykreślić uśrednioną charakterystykę
magnesowania E
a0śr
= E
a0śr
(I
f
) (patrz rys.2.1).
Wartości indukcyjność rotacji wyznaczamy ze wzoru:
rm
f
śr
a
śr
af
I
E
G
Ω
0
0
====
(2.1)
gdzie, prędkość kątowa silnika (rad/s) wyznaczamy z zależności
60
2 n
rm
π
Ω
====
Należy sporządzić wykres charakterystyki indukcyjność rotacji w funkcji prądu I
f
oraz wyznaczyć
jej wartość G
af0n
przy znamionowym prądzie wzbudzenia I
fn
.
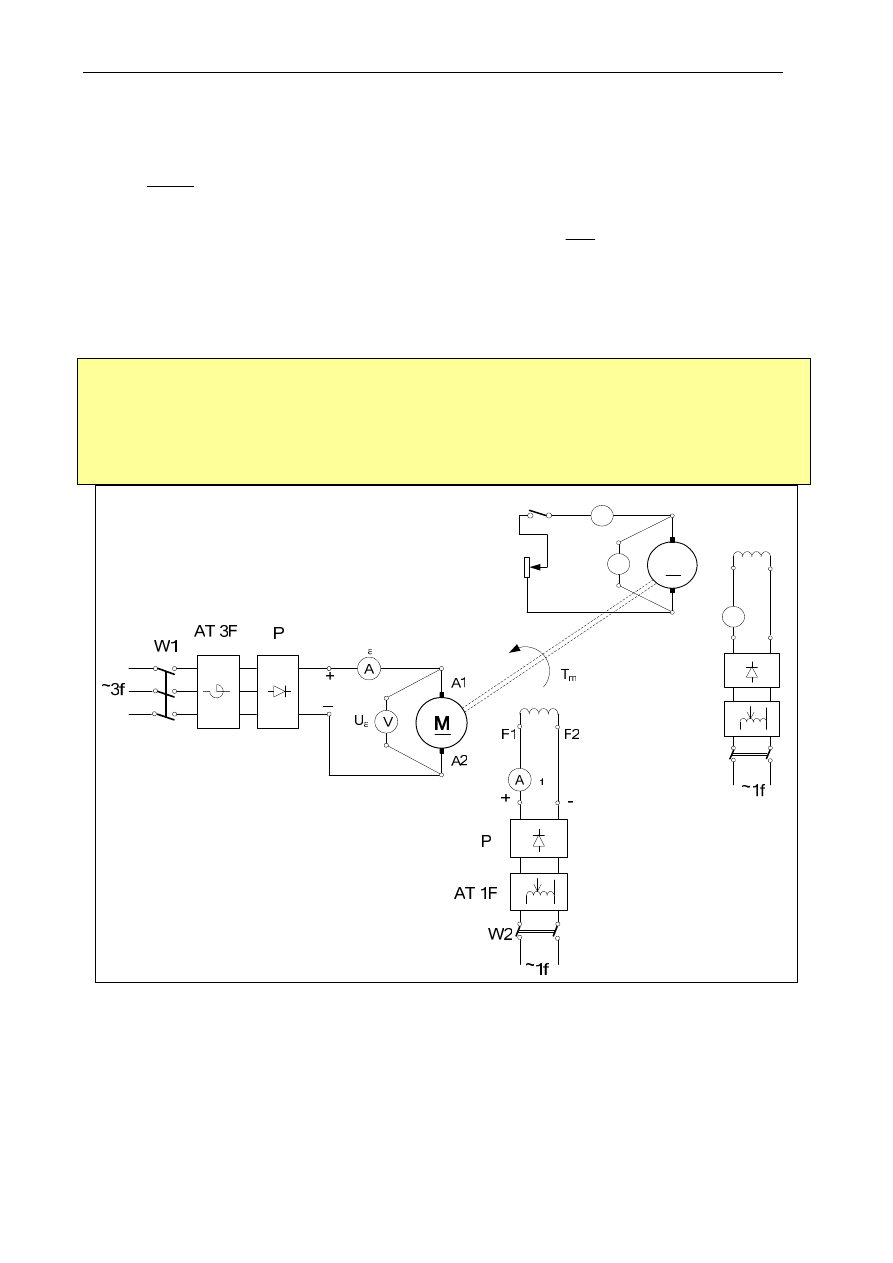
2.4. Charakterystyki mechaniczne
Charakterystyka mechaniczna naturalna obcowzbudnego silnika prądu stałego przedstawia zależność:
prędkości kątowej
Ω
rm
(obrotowej n) od mementu obrotowego T
m
na wale silnika:
)
(
m
rm
rm
T
Ω
Ω
====
lub
)
(
m
T
n
n
====
przy napięciu zasilania twornika U
a
= U
an
= const
przy prądzie wzbudzenia I
f
= I
fn
= const
przy braku rezystancji dodatkowej w obwodzie twornika.
A
AT 1F
+
-
F1
F2
G
A1
A2
V
I
fp
W3
P
A
R
r
I
ap
U
ap
W4
Rys. 2.3. Schemat układu do pomiaru charakterystyk mechanicznych obcowzbudnego silnika prądu stałego
Z równania charakterystyki mechanicznej silnika (l.19) wynikają następujące metody jej
kształtowania:
a) sterowanie przez zmianę wartości napięcia U
a
zasilania obwodu twornika;
b) sterowanie przez zmianę wartości prądu I
f
(strumienia
Φ
f
) wzbudzenia;
c) sterowanie przez zmianę wartości rezystancji dodatkowej R
ad
w obwodzie twornika.
Przykłady idealizowanych charakterystyk mechanicznych obcowzbudnego silnika prądu stałego
podano na rys. 1.5.
M. Ronkowski,
G. Kostro, M. Michna
14
Schemat układu do pomiaru charakterystyk mechanicznych obcowzbudnego silnika prądu stałego
podano na rys. 2.3.
W pierwszym etapie przeprowadzamy rozruch silnika. Następnie, przy znamionowych wartościach
napięcia zasilania obwodu twornika oraz prądu wzbudzenia silnika, wzbudzamy prądnicę (maszyna prądu
stałego do obciążania badanego silnika) do osiągnięcia znamionowej wartości napięcia twornika.
Obciążeniem na wale badanego silnika sterujemy poprzez zmianę nastawy rezystora w obwodzie twornika
R
r
prądnicy. Wyniki pomiarów notujemy w tab. 2.4.
Tabela 2.4a Pomiar charakterystyki mechanicznej obcowzbudnego silnika prądu stałego
U
a
I
f
I
a
n
T
m
U
ap
I
ap
V
A
A
obr/min
Nm
V
A
const
const
U
an
I
fn
Uwaga: Pomiary powtórzyć dla przypadku: U
a
= 0.75 U
an
Tabela 2.4b Pomiar charakterystyki mechanicznej obcowzbudnego silnika prądu stałego
U
a
I
f
I
a
n
T
m
U
ap
I
ap
V
A
A
obr/min
Nm
V
A
const
const
0.75 U
an
I
fn
Uwaga: Pomiary powtórzyć dla przypadku: I
f
= 0.75 I
fn
Tabela 2.4c Pomiar charakterystyki mechanicznej obcowzbudnego silnika prądu stałego
U
a
I
f
I
a
n
T
m
U
ap
I
ap
V
A
A
obr/min
Nm
V
A
const
const
U
an
I
f
= 0.75I
fn
Uwaga: Pomiary powtórzyć przy włączeniu dodatkowej rezystancji w obwodzie twornika silnika: R
ad
≠
0
Maszyny prądu stałego
15
Tabela 2.4d Pomiar charakterystyki mechanicznej obcowzbudnego silnika prądu stałego
U
a
I
f
I
a
n
T
m
U
ap
I
ap
R
ad
V
A
A
obr/min
Nm
V
A
Ω
const
const
const
U
an
I
fn
R
ad
≠
0
•
Wielkości obliczone:
W przypadku braku miernika momentu (momentomierza) możemy wyznaczyć moc na wale silnika
w sposób przybliżony:
p
m
m
P
P
T
P
rm
2
1
≅≅≅≅
====
Ω
(2.2)
Wzór (2.2) jest słuszny przy następujących założeniach upraszczających:
•
sprawności silnika i prądnicy są jednakowe
p
s
η
η
====
•
moc oddana przez silnik P
2
równa się mocy mechanicznej P
m
pobranej przez prądnicę P
1p
:
p
m
P
P
P
1
2
====
====
(2.3)
•
moc elektryczna oddana P
2p
przez prądnicę
ap
I
U
P
ap
p
====
2
(2.4)
3.
ZADANIA
1.
Wykreślić pomierzoną charakterystykę całkowitej rezystancji obwodu twornika R
a
= I
a
(I
a
) badanego
silnika.
2.
Wykreślić charakterystykę magnesowania U
a0
= E
a0
= E
a0
(I
f
) badanego silnik
3.
Wykreślić charakterystyki indukcyjności rotacji G
af0
= G
af0
(I
f
) badanego silnika.
4.
Określić wartość znamionowej indukcyjność rotacji G
af0n
badanego silnika.
5.
Uzasadnić kształt pomierzonych charakterystyk (p.2 i p.3).
6.
Wykreślić pomierzone charakterystyki mechaniczne badanego silnika.
7.
Na pomierzonych charakterystykach mechanicznych nanieść współrzędne odpowiadające
znamionowemu momentowi i znamionowej prędkości obrotowej badanego silnika.
8.
Uzasadnić kształt pomierzonych charakterystyk mechanicznych badanego silnika.
9.
Wykreślić idealizowane charakterystyki mechaniczne badanego silnika. Należy posłużyć się
odpowiednimi zależnościami (np. rów. (1.27)).
Uwaga: Wartości G
af
oraz R
a
wyznaczyć w oparciu o wyniki pomiarów (obliczeń).
10.
Porównać pomierzone charakterystyki mechaniczne i idealizowane charakterystyki mechaniczne
badanego silnika. Uzasadnić występujące różnice miedzy nimi.
11.
Wyznaczyć procentową zmianę prędkości obrotowej przy znamionowym obciążeniu w stosunku do
prędkości biegu jałowego badanego silnika.
12.
Obliczyć wg wzoru (1.26) i (1.27) wartość prędkości obrotowej badanego silnika w warunkach
znamionowego zasilania i obciążenia. Porównać wyznaczoną wartość z podaną na tabliczce
znamionowej badanego silnika.
Uwaga: Wartości G
af
oraz R
a
wyznaczyć w oparciu o wyniki pomiarów i obliczeń (w oparciu o dane
katalogowe badanego silnika).
13.
Sporządzić bilans mocy i strat badanego silnika dla pracy w warunkach znamionowego zasilania i
obciążenia.
14.
Porównać sprawność i koszty (szacunkowe) aparatury dla poszczególnych metod sterowania
prędkości obrotowej badanego silnika.

M. Ronkowski,
G. Kostro, M. Michna
16
4.
PYTANIA KONTROLNE
• Pytania ze znajomości teorii z zakresu tematyki ćwiczenia
1.
Opisać maszynę prądu stałego jako trójwrotowy przetwornik elektromechaniczny. Przedstawić
kierunki przepływu mocy przy pracy prądnicowej i silnikowej. Jaka jest funkcja mocy dostarczanej
do obwodu wzbudzenia? Czy ta moc ulega przetworzeniu na moc mechaniczną?
2.
Naszkicować uproszczony przekrój poprzeczny maszyny prądu stałego. Wymienić i nazwać
podstawowe elementy maszyny prądu stałego i podać ich funkcje.
3.
Naszkicować elementarny model silnika prądu stałego (z dwoma wycinkami komutatora). Wyjaśnić
działanie (funkcję) komutatora i szczotek.
4.
Jaka jest funkcja komutatora i szczotek w maszynie prądu stałego? Wyjaśnić na przykładzie
elementarnego silnik prądu stałego (z dwoma wycinkami komutatora).
5.
Naszkicować i omówić model fizyczny SPS (rys. 1.3a w instr. do ćwiczenia MPS). Opisać zasadę
działania silnika w ujęciu ciągu logicznego przyczyna - skutek.
6.
Podać zależności na podstawowe wielkości elektromechaniczne SPS. Uzasadnić ich analogię do
wzoru na siłę Lorentza.
7.
Narysować podstawowy model obwodowy obcowzbudnego silnika prądu stałego (rys. 1.3b w instr.
do ćwiczenia MPS). Wyjaśnić jakie zjawiska fizyczne zachodzące w silniku odwzorowują
poszczególne elementy modelu.
8.
Podać równania opisujące model obwodowy obcowzbudnego silnika prądu stałego. Wyjaśnić jakie
zjawiska fizyczne zachodzące w silniku odwzorowują poszczególne wielkości modelu.
9.
Podać zależność i wykreślić idealizowaną charakterystykę elektromechaniczną i mechaniczną
obcowzbudnego silnika prądu stałego.
10.
Podać metoda kształtowania charakterystyki elektromechanicznej i mechanicznej obcowzbudnego
silnika prądu stałego. Do wyjaśnienia tych metod posłużyć się odpowiednimi zależnościami.
11.
Wymienić podstawowe wady i zalety poszczególnych metod sterowania prędkości obrotowej
(kształtowania charakterystyki mechanicznej) silnika prądu stałego.
•
Pytania z przygotowania praktycznego do ćwiczenia
1.
Narysować symbol graficzny obcowzbudnego silnika prądu stałego i podać oznaczenie zacisków
uzwojeń.
2.
Podać sposoby połączeń uzwojeń dla podstawowych typów silnika prądu stałego.
3.
Podać orientacyjne wartości procentowe dla obcowzbudnej maszyn prądu stałego:
•
spadku napięcia na rezystancji uzwojenia wzbudzenia i twornika,
•
prądu wzbudzenia (magnesującego) maszyny bocznikowej,
•
strat w żelazie, w uzwojeniach i mechanicznych, a także relacje między ich wartościami,
•
sprawności.
4.
Podać zasady doboru zakresu mierników do pomiaru rezystancji uzwojeń silnika prądu stałego.
5.
Dlaczego wartość rezystancji obwodu twornika silnika prądu stałego nie jest stała?
6.
Podać zasady doboru zakresu mierników do pomiaru charakterystyk silnika prądu stałego.
7.
Narysować układ pomiaru charakterystyki magnesowania maszyny prądu stałego. Podać zasady
doboru zakresu mierników.
8.
Podać metodę wyznaczania wartości indukcyjności rotacji w maszynie prądu stałego.
9.
Narysować układ do pomiaru charakterystyki mechanicznej obcowzbudnego silnika prądu stałego.
Podać zasady doboru zakresu mierników.
10.
Jak należy ustawić wartość prądu (dobrać opornik) w obwodzie wzbudzenia obcowzbudnego silnika
prądu stałego przy rozruchu?
11.
Jak należy ustawić wartość napięcia zasilania obwodu twornika (ograniczyć wartość rozruchową
prądu twornika) obcowzbudnego silnika prądu stałego przy rozruchu?
5.
LITERATURA POMOCNICZA
1.
Fitzgerald A.E, Kingsley Ch. (Jr.), Umans S. D.: Electric Machinery. 6th ed. McGraw-Hill, New
York, 2003.
2.
Latek W.: Zarys maszyn elektrycznych. WNT, W-wa 1974.
3.
Latek W.: Teoria Maszyn Elektrycznych. wyd. 2.WNT, Warszawa, 1987.
4.
Latek W.: Badania maszyn elektrycznych w przemyśle. WNT, W-wa 1979.
Maszyny prądu stałego
17
5.
Manitius Z.: Maszyny prądu stałego. Skrypt. Wyd . Pol. Gdańskiej, Gdańsk 1977.
6.
Manitius Z.: Maszyny Elektryczne. Cz.I. Skrypt. Wyd. Pol. Gdańskiej, Gdańsk 1977.
7.
Matulewicz W.: Maszyny elektryczne. Podstawy. Wydawnictwo PG 2005.
8.
Plamitzer A.: Maszyny elektryczne. Wyd. 7. WNT, W-wa 1992.
9.
Praca zbiorowa (red. Manitius Z.): Laboratorium maszyn elektrycznych. Skrypt. Wyd.2. Wyd. Pol.
Gdańskiej, Gdańsk 1990.
10.
Rafalski W., Ronkowski M., Zadania z maszyn elektrycznych, Cz. II: Maszyny syncroniczne i
maszyny prądu stałego, skrypt, wyd. 4, Wyd. Politechniki Gdańskiej, 1994.
11.
Ronkowski M., Michna M., Kostro G., Kutt F.: Maszyny elektryczne wokół nas: zastosowanie,
budowa, modelowanie, charakterystyki, projektowanie. (e-skrypt). Wyd. PG, Gdańsk, 2011.
http://pbc.gda.pl/dlibra/docmetadata?id=16401&from=&dirids=1&ver_id=&lp=2&QI
=
12.
Roszczyk S.: Teoria maszyn elektrycznych. WNT, W-wa 1979.
13.
Staszewski P., Urbański W.: Zagadnienia obliczeniowe w eksploatacji maszyn elektrycznych.
Oficyna Wyd. Politechniki Warszawskiej, Warszawa, 2009.
Ważniejsze Normy
1.
PN-IEC 34-1:1997 Maszyny elektryczne wirujące. Ogólne wymagania i badania
.
http://www.pkn.pl/
Ważniejsze adresy internetowe producentów/dystrybutorów
1
ABB Sp. z o.o.:
http://www.abb.pl/ProductGuide/
2
Branżowy Ośrodek Badawczo-Rozwojowy Maszyn Elektrycznych KOMEL w Katowicach
http://www.komel.katowice.pl/
3
Siemens: http://www.siemens.com/answers/pl/pl
4
Zakład Maszyn Elektrycznych EMIT S.A. w Żychlinie
http://www.cantonigroup.com/pl/motors/emit/
Wyszukiwarka
Podobne podstrony:
Lab ME MPS instrukcja 2012 E
Lab ME MI1 instrukcja 2012 E
Lab ME MS instrukcja 2012 E id Nieznany
Lab ME TR instrukcja 2012 E id Nieznany
Lab ME MI2 instrukcja 2012 E id Nieznany
Lab ME MS instrukcja 2012 E
Lab ME MI2 instrukcja 2012 E
Lab ME SPS instrukcja 2011 2012 E
Lab ME MPS pytania kontr 2012 E
Lab ME MI instrukcja 2011 2012 E
Lab ME TR instrukcja 2011 2012 Nieznany
Lab ME MI instrukcja 2011 2012 E
grafik lab ME EIST3 zima 2012
Lab ME II zad rach 2012 13
BIOLOGIA lab instrukcje 2012 13
lab 4 panel operatorski instrukcja
więcej podobnych podstron