Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
Prezentacja na temat:
Budowa i zasada działania programowalnych sterowników PLC
Zdjęcie skopiowano ze strony producenta Simens
Przedmiot: Sterowniki PLC
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 2 z 11
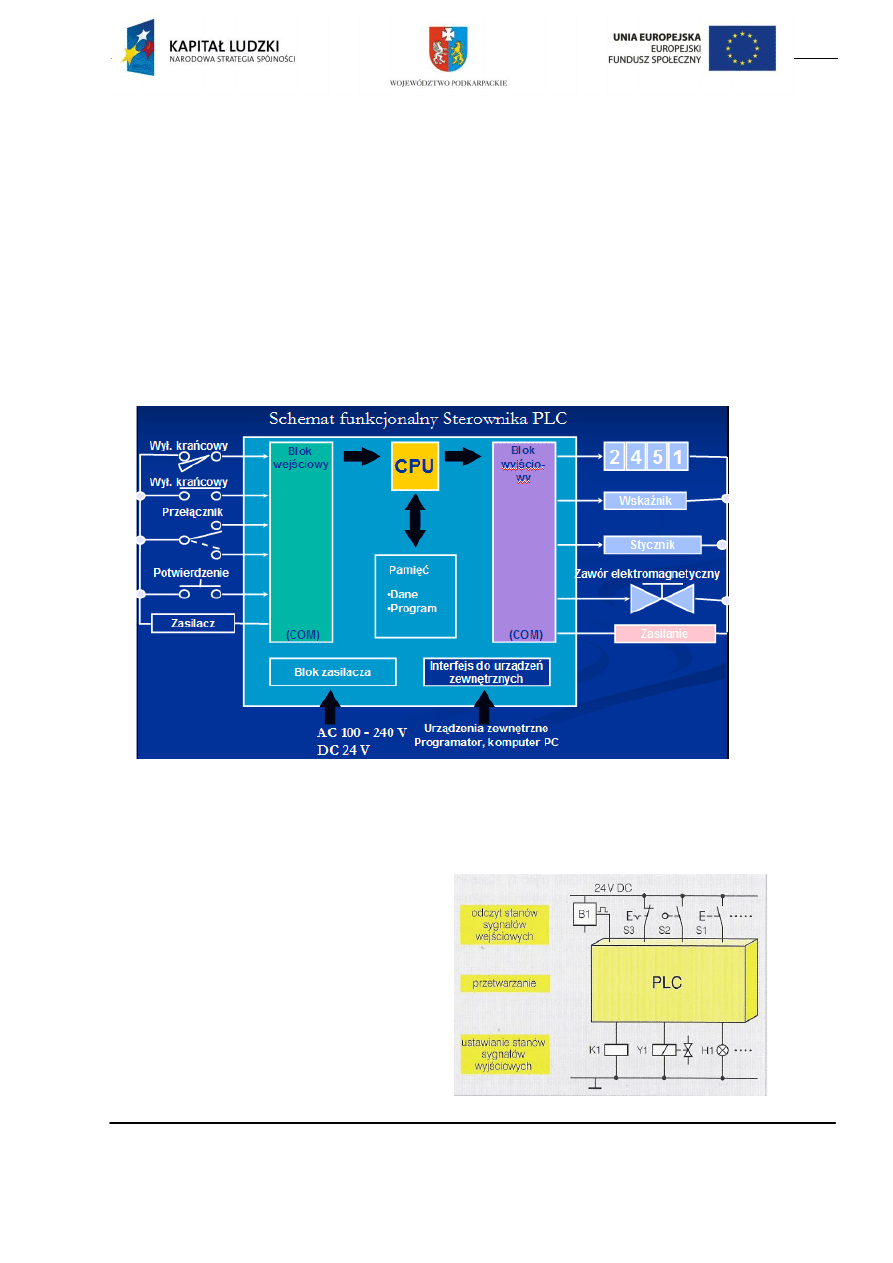
1. Budowa i zasada działania sterownika programowalnego PLC
Sterownik programowany PLC ( Programmable Logic Controller) jest programowalnym
komputerem o budowie podobnej do standartowych komputerów osobistych.
Składa się z zasilacza (układu niskonapięciowego), modułu sygnałów wejściowych, jednostki
centralnej z mikroprocesorem, pamięci programu oraz modułu sygnały wyjściowego.
Inaczej niż w układach stałoprogramowych, w których przebieg sterowania jest określony przez
wykorzystanie elementów i ich wzajemne połączenie, w sterowniku programowalnym przebieg ten jest
zapamiętywany w pamięci sterownika w postaci programu.
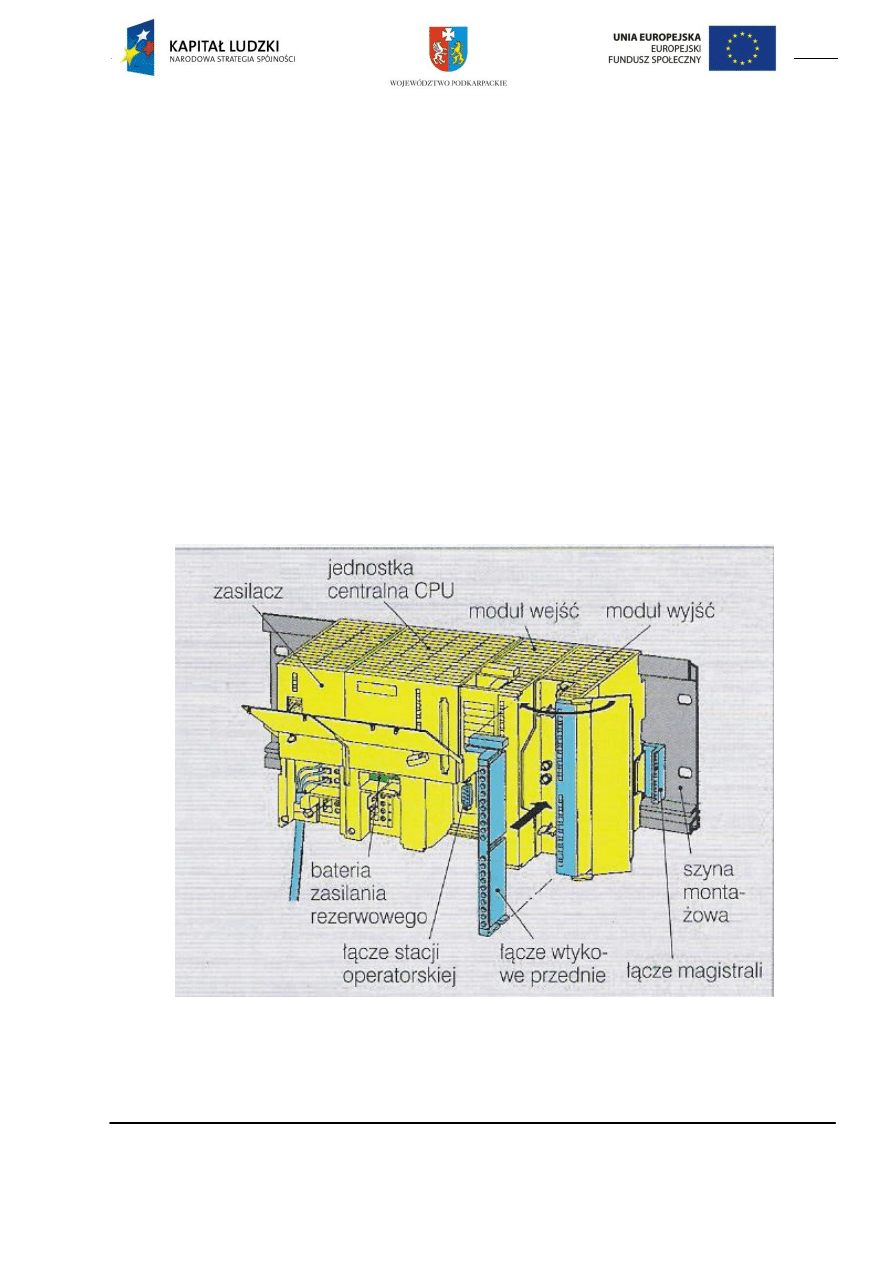
Rysunek 1.
Schemat budowy sterownika PLC
Sterownik programowalny jest wykorzystywany jako centralna część, przetwarzająca układu
sterowania. Sterownik programowalny czyta wejścia, wypisuje stany na wyjściach i wykonuje logikę w
oparciu o program sterujący
Rysunek 2.
Przykład podłączenia sterownika PLC
Schemat zeskanowany z książki Mechatronika –
D.Schmid i współautorzy.
.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 3 z 11
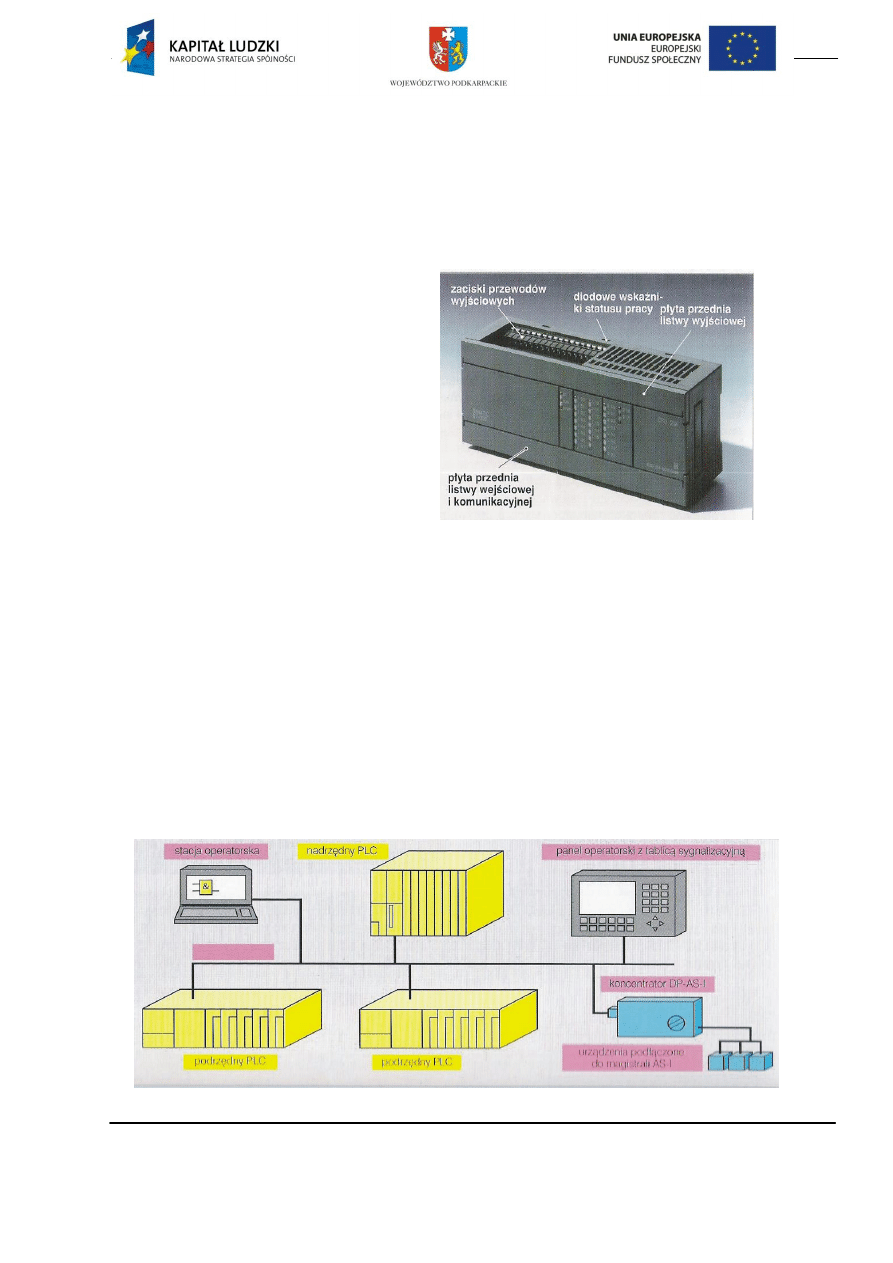
W układach o niewielkim stopniu przetwarzania, odpowiadającym maksymalnie 100 DI/DO,
(DI – Discrete Input = wejścia dyskretne dwustanowe, DO – Discrete Output – wyjścia dyskretne
dwustanowe) wykorzystuje się tzw. małe, kompaktowe sterowniki, nazywane także
mikrosterownikami.
Rysunek 3.
Mikrosterownik PLC
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
W przypadku złożonych zadań sterowania – sterowniki nazywamy średnimi (100 – 500 DI/DO) lub
dużymi (500 – 3000 DI/DO) o budowie modułowej.
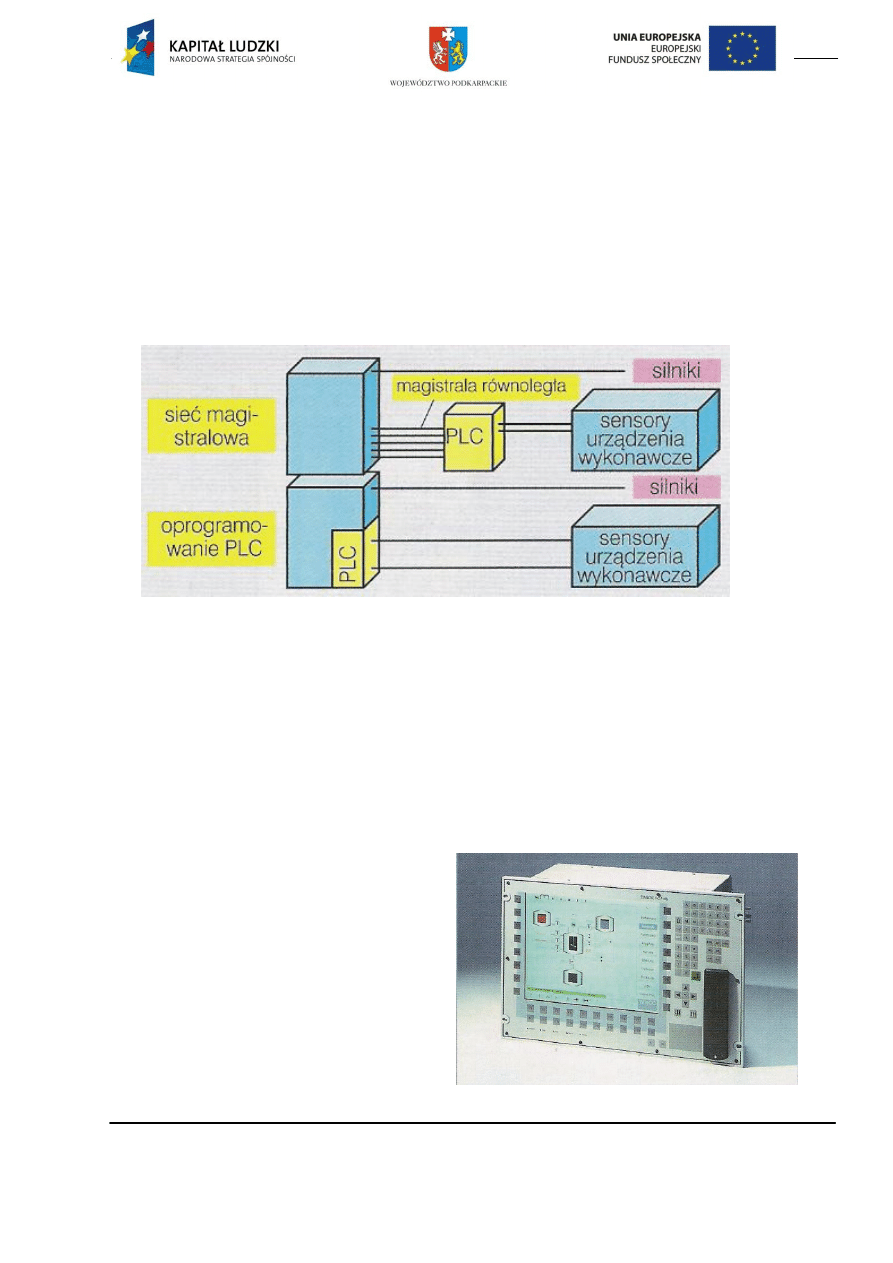
Do obsługi poszczególnych jednostek produkcyjnych wykorzystuje się często sterowniki lokalne,
,,podrzędne’’ (Slave - sługa), połączone przy pomocy sieci ze sterownikiem ,,nadrzędnym’’ (Master -
pan), np. PROFIBUS – DP. Do magistrali (BUS – zbiorcza szyna, magistrala dla wymiany danych)
może być podłączonych wiele urządzeń (elementów sieci), jak np. sterowniki, stacje operatorskie i
panele operatorskie.
Rysunek 4.
Sterowniki w sieci
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 4 z 11
Sterowniki i urządzenia mogą być także podłączone do innych sieci, np. AS – I (Actuator Sensor
Interface), pozwalające na bezpośrednią współpracę z urządzeniami pomiarowymi i wykonawczymi w
systemie rozproszonego przetwarzania danych.
Sterownik programowalny PLC może być także zintegrowany z innym układem sterowania
cyfrowego (mikroprocesorowego), np. z komputerowym sterownikiem numerycznym CNC (Komputer
Numerical Control).
Rysunek 5.
Zintegrowane sterowniki programowalne
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
W takim przypadku sterownik programowalny będzie uaktywniany przez program sterownika CNC.
Jeżeli potrzebne są tylko wybrane funkcje sterownika programowalnego, to najczęściej integruje się
tylko odpowiednie moduły oprogramowania z systemem operacyjnym sterownika CNC. Coraz
częściej, wraz z wykorzystaniem komputerów PC do programowania sterowników i do sporządzania
dokumentacji programu oraz z wprowadzeniem rozwiązań sprzętowych i programowych stosowanych
w komputerowych systemach sterowania, wykorzystuje się komputery przemysłowe do realizacji
zadań sterownika programowalnego.
Rysunek 6.
Komputer przemysłowy
Schemat zeskanowany z książki Mechatronika –
D.Schmid i współautorzy.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 5 z 11
W typ przypadku możliwe jest bądź wykorzystanie komputera przemysłowego z oprogramowaniem
PLC bądź wykorzystanie w komputerze kart rozszerzeń typu PLC.
Podsumowując:
Sterowniki programowalne PLC spotyka się w postaci:
kompaktowej
modułowej
połączonej za pomocą sieci LAN
zintegrowanej z innymi sterownikami
w postaci komputera przemysłowego
Obecnie najczęściej wykorzystuje się sterowniki PLC o budowie modułowej. Centralną grupę
modułów sterownika tworzą: zasilacz, moduł jednostki centralnej CPU (Central Processing Unit –
centralna jednostka przetwarzająca), oraz przynajmniej jeden moduł wejść dyskretnych i jeden moduł
wyjść dyskretnych.
Rysunek 7.
Sterownik programowy o budowie modułowej.
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 6 z 11
Moduł jednostki centralnej CPU należy podłączyć do źródła napięcia, przeważnie jest to 24 V DC
Aby nie powodować utraty zapamiętanych danych podczas awarii zasilania, podtrzymuje się zasilanie
modułu za pomocą baterii lub akumulatorów.
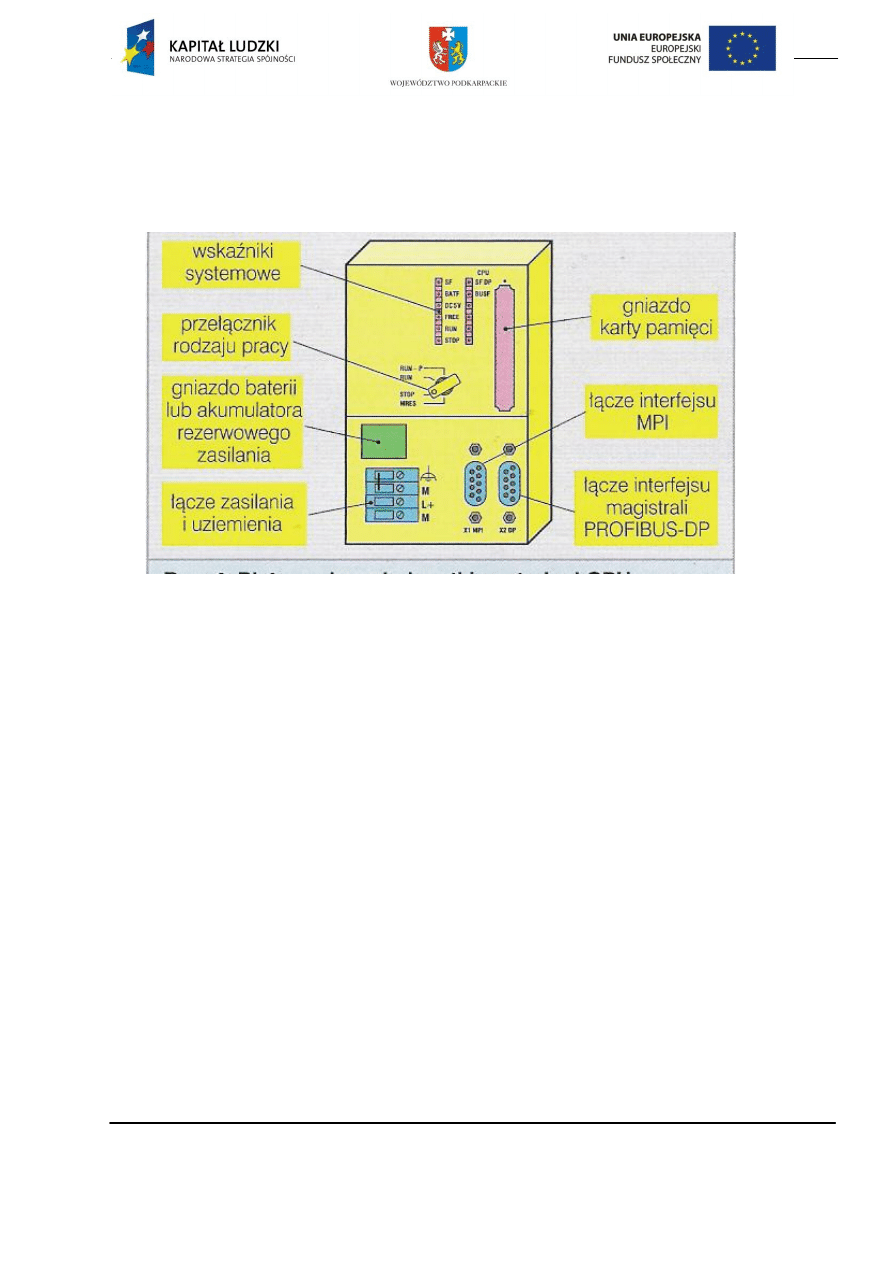
Rysunek 8.
Przykładowa płyta czołowa sterownika PLC.
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Jeżeli przełącznik rodzaju pracy jest w pozycji STOP (w nowych rozwiązaniach brak jest stacyjki),
programy aplikacyjne mogą zostać przesłane do jednostki CPU. Wymianę danych pomiędzy stacją
operatorską i modułem CPU zapewnia zwykle interfejs komunikacyjny typu MPI (Multi Point
Interface). Pozycja MRES (Memory Reset) przełącznika modułu odpowiada kasowaniu pamięci CPU,
pozycja RUN – przetwarzanie programu aplikacyjnego, pozycja RUN – P – przetwarzanie z
możliwością ustawienia wartości zmiennych.
Przez interfejs magistrali PROFIBUS – DP moduł CPU komunikuje się z innymi modułami –
moduły są nazwane peryferiami.
Wskaźniki systemowe informują o aktualnym stanie pracy modułu CPU. Przy wskazaniu SF lub SF
PD dokładne informacje o rodzaju popełnionego błędu mogą być pobierane z modułu kontrolera.
Jednostka centralna zawiera mikroprocesor oraz różne obszary pamięci – obszar danych, roboczy i
systemowy, połączone z sobą wewnętrzną magistralą danych sterownika.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 7 z 11
W pamięci danych sterownika przechowywane są dane i instrukcje programu użytkownika. Pamięć
ta jest albo typu RAM (Random Access Memory – pamięć ze swobodnym dostępem), albo EPROM
(Erasable Programmable Read Only Memory – elektrycznie programowalna i kasowalna pamięć
ROM) – może być rozszerzona za pomocą dodatkowych kart lub modułów pamięci. W przypadku
karty wyposażonej w pamięć EPROM, program użytkownika może być do niej załadowany w trybie off
– line, co zabezpiecza go przed utratą podczas awarii zasilania.
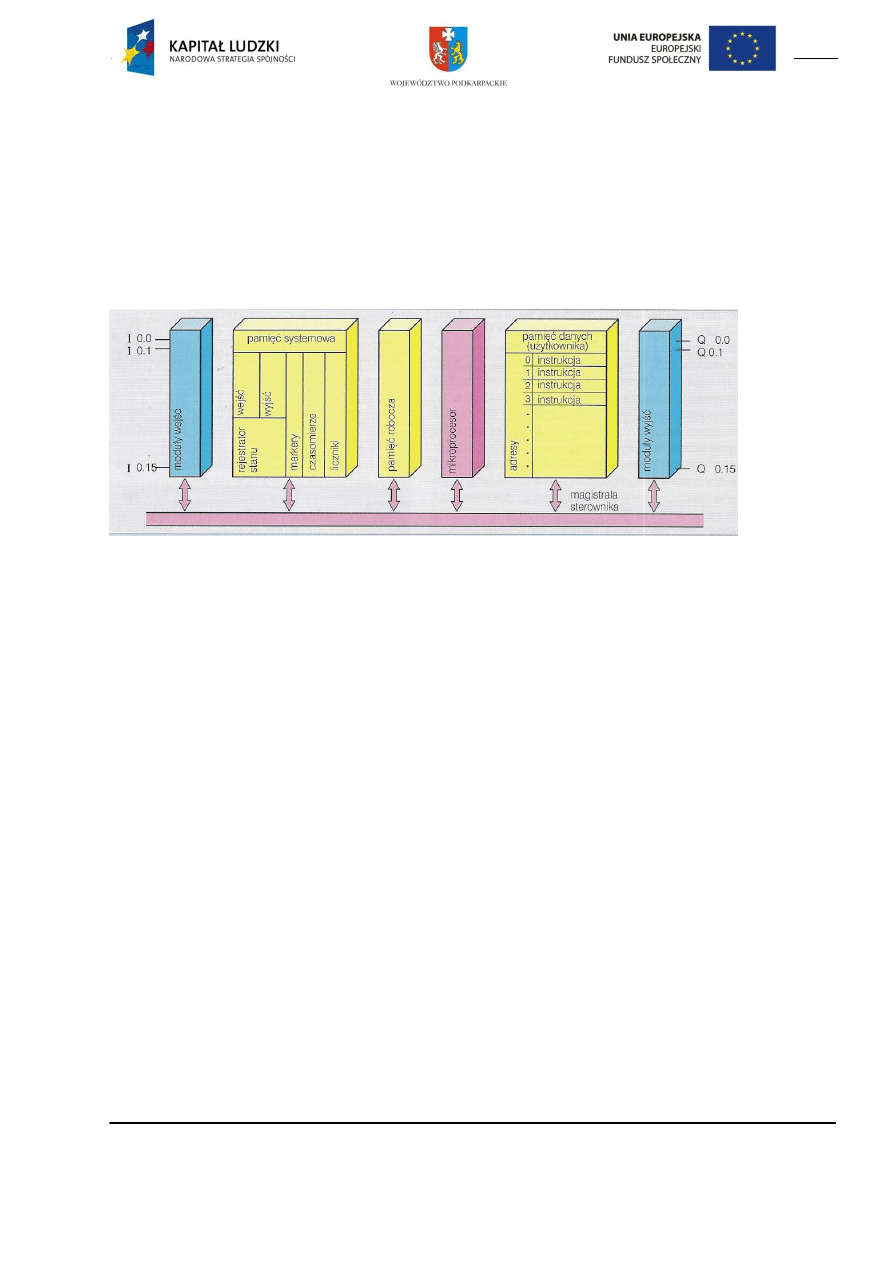
Rysunek 9.
Budowa wewnętrzna sterownika.
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Pamięć robocza jest szybką pamięcią typu RAM. Kopiowane są do niej dane w trakcie
przetwarzania programu użytkownika. Pamięć systemowa zawiera zmienne, nazywane także
operandami, na których wykonywane są operacje programu. Zmienne te zbierane są w wydzielone
obszary, nazywane obszarami operandów. Wielkość tych obszarów zależy od zastosowanego CPU.
Operandy CPU:
zmienne wejściowe, wejścia ( I – Input) – dostarczane jak argumenty przetwarzania
programowego przez moduły wejściowe,
zmienne wyjściowe, wyjścia (Q – quit – odpuszczać) – argument użyte w celu zwrócenia
wyniku przetwarzania przez moduły wyjściowe,
zmienne markujące, markery (M – Marker – człowiek notujący zapisy w grze) – zmienne
wewnętrzne informujące o stanie przetwarzania,
zmienne czasowe (T – timer) – generowane przez bloki funkcyjne wykorzystywane do
realizacji uwarunkowań czasowych lub odmierzania czasu,
zmienne licznikowe (C – Counter) – przetwarzane przez bloki funkcyjne realizujące
programowo liczenie dodające i odejmujące,
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 8 z 11
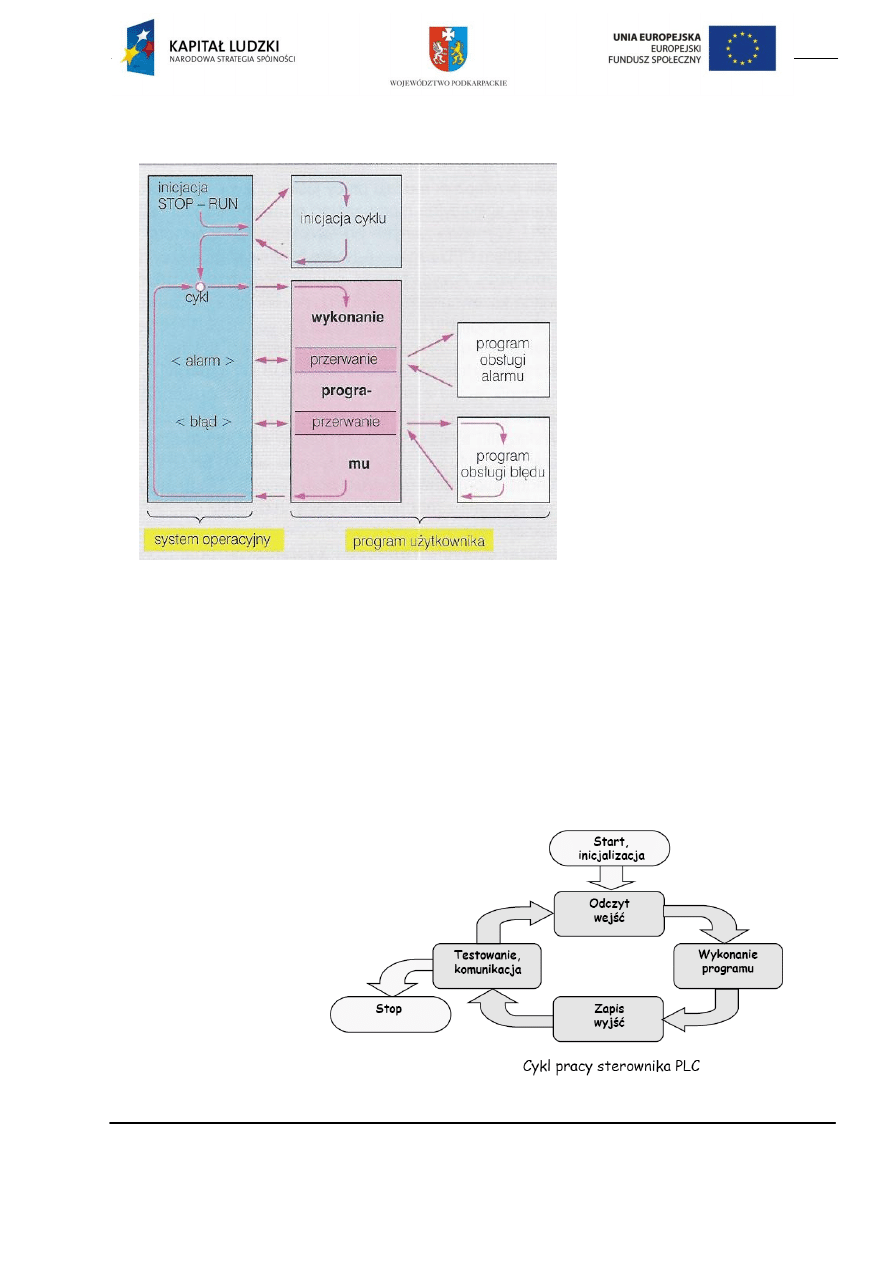
W stanie załączenia RUN program użytkownika jest cyklicznie przetwarzany.
Rysunek 10.
Przetwarzanie programu użytkownika.
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Najpierw odczytywany jest z pamięci systemowej stan zmiennych wejściowych. Potem następuje,
odpowiednio do programu użytkownika, właściwe przetwarzanie. Wynikiem przetwarzania
programowego jest nowy stan zmiennych wyjściowych zapamiętywany w pamięci systemowej i
podany odpowiednio na wyjścia sterownika. Kolejno następuje aktualizacja stanów zmiennych
wejściowych, przetworzenie, zwrócenie wyniku itp. Czas takiego pojedynczego przebiegu nazywamy
czasem cyklu. Zależy on także od prędkości przetwarzania wykorzystywanego CPU. Przeważnie
wynosi kilka milisekund.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 9 z 11
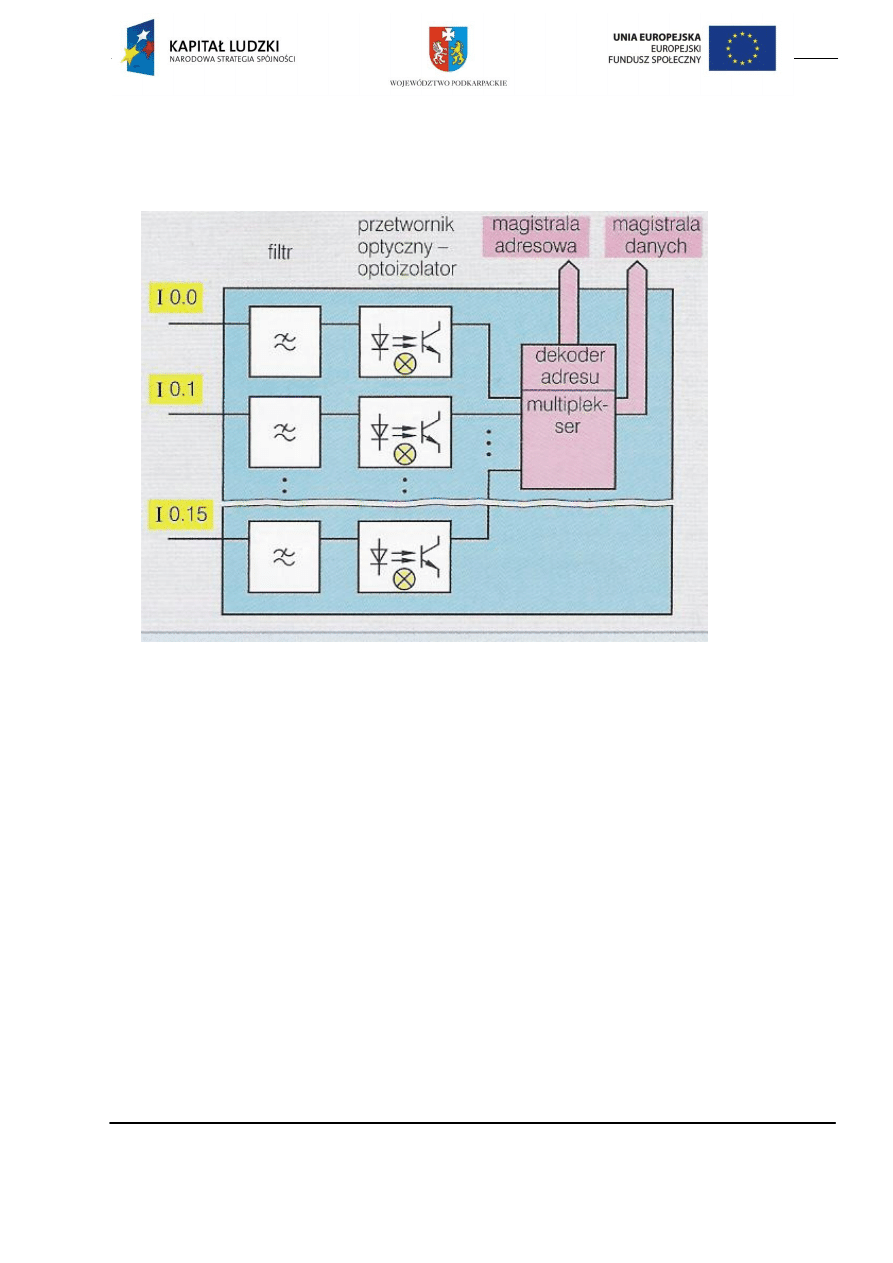
Część wejściowa sterownika – podzielona jest na moduły obejmujące przeważnie 8,16, lub 32
wejść binarnych
Rysunek 11.
Schemat podłączeń wejść.
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Moduł wejściowy zawiera układy elektroniczne zamieniające sygnały pochodzące z urządzeń
zewnętrznych na sygnały logiczne akceptowane przez sterownik. Mogą to bytć np. dzielniki napięć z
dodatkowymi filtrami RC dla tłumienia zakłóceń. Moduły wejść prądu stałego wyposażone są
dodatkowo w diody chroniące właściwą polaryzacją (najczęściej dodatnią, nazywane także ,,ze
wspólnym plusem’’), a moduły wejść prądu przemiennego – w mostkowe układy prostownicze. Dla
izolacji potencjałowej obwodów wejściowych i magistrali sterownika stosowane są podłączenia
optyczne – optoizolacje (fotodiody jako nadajniki i fotorezystor jako odbiornik w jednym elemencie,
tzw. Optoizolator). Stan szczególnych bitów bufora danych modułu wejściowego sygnalizowany jest
diodami typu LED – pozwala to na szybką identyfikację stanu wejść w trakcie uruchomienia
sterownika lub w trakcie poszukiwania błędów. Multiplekser (rozdzielacz) stosowany jest przez
dekoder adresów.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 10 z 11
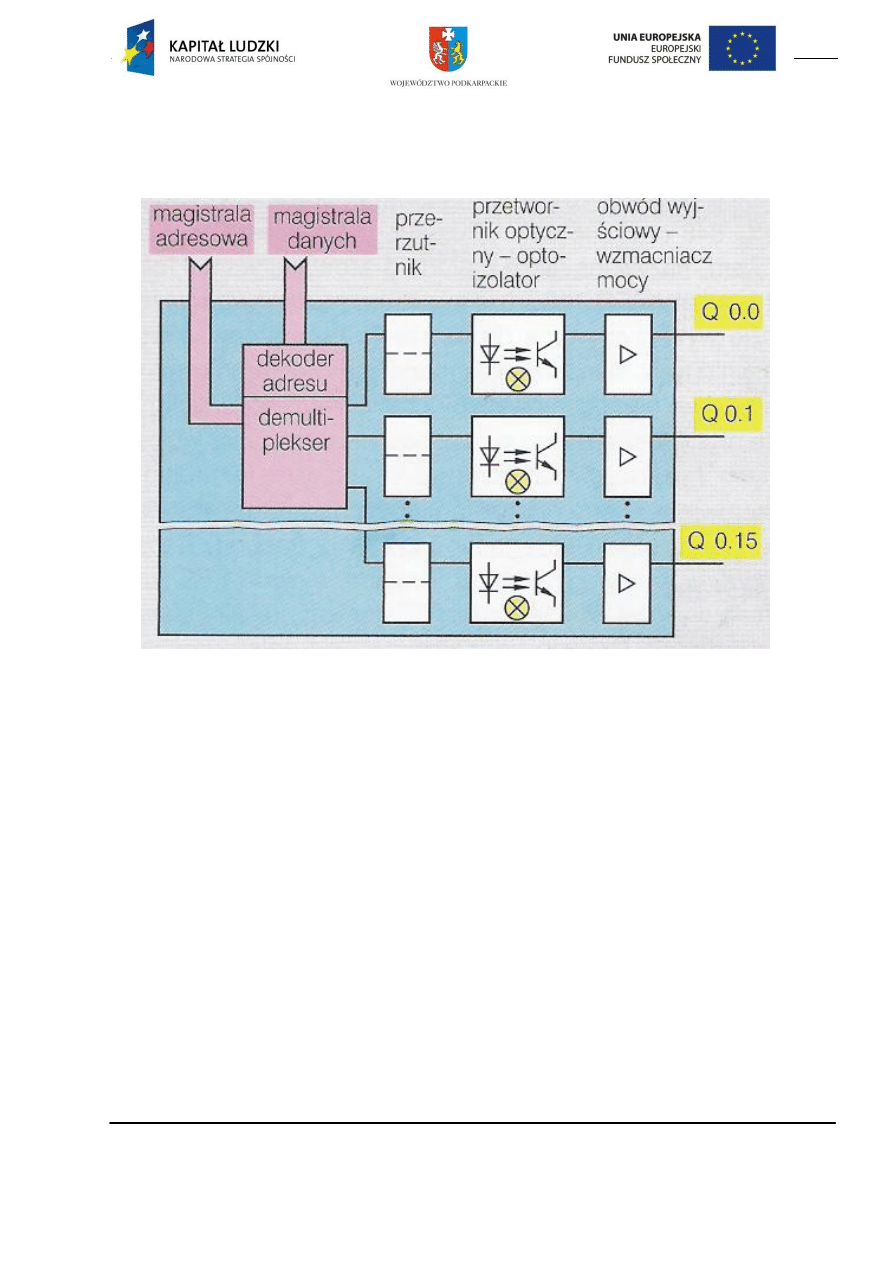
Część wyjściowa sterownika – podzielona jest również na moduły obejmujące 8 lub 16 wyjść
binarnych.
Rysunek 12.
Schemat podłączeń wyjść.
Schemat zeskanowany z książki Mechatronika – D.Schmid i współautorzy.
Moduł wyjściowy zawiera układy wzmacniające, np. łącznik tranzystorowy dla obwodów
wyjściowych prądu stałego (np. 24V DC, 200mA) lub łącznik triakowy (elektroniczny łącznik prądu
przemiennego) dla bezpośredniego wysterowania obwodów wyjściowych z obciążeniami prądowymi,
indukcyjnymi i pojemnościowymi (np. 50Hz, 230V AC).
W przypadku zakłócenia przetwarzania programu użytkownika, moduły wyjściowe po zakończeniu
danego cyklu przetwarzania przerywają sterowanie dołączonymi obwodami wyjściowymi z
urządzeniami wyjściowymi z urządzeniami wykonawczymi procesu – zapobiega to niebezpiecznym
skutkom awarii. Stan poszczególnych wyjść modułu określa demultiplekser sterowany przez CPU
sterownika. W dekoderze adresów zostaje odkorowany adres wybranego przez mikroprocesor wyjścia
i odpowiednia wartość binarna przesyłana z magistrali danych przez demultiplekser do układów
wyjściowych modułów.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/ regionalnego
rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu
Społecznego.
strona: 11 z 11
Pytania sprawdzające wiedzę:
Czym charakteryzuje się sterowanie programowe?
Co to jest i do czego służy sterownik przemysłowy PLC ?
Z jakich bloków składa się sterownik PLC ?
Jak dzielimy sterowniki PLC ?
Jakie rodzaje operandów występują w sterownikach ?
Narysuj przykład podłączenia sterownika PLC ?
Jak przetwarzany jest program w sterowniku PLC ?
Wyszukiwarka
Podobne podstrony:
Budowa i zasada działania układu pneumatycznego z?S oraz kryteria oceny
Budowa i zasada działania FDD
Czujniki pomiarowe Budowa i zasada dzialania
Budowa i zasada działania mikroskopu optycznego metalograficznego
Budowa i zasada działania lasera, fizyka, Referaty
Budowa i zasada działania galwanometru statycznego
Budowa i zasada działania odgromników
fiz 05, Budowa i zasada działania lasera He-Ne;
BUDOWA I ZASADA DZIAŁANIA SKANINGOWEGO MIKROSKOPU ELEKTRONOWEGO
Budowa i zasada działania Procesora Wielordzeniowego
Budowa i zasada działania układu chłodzenia w silnikach serii K
Budowa i zasada działania pamięci taśmowych, Studia, Informatyka, Informatyka, Informatyka
Budowa i zasada działania MONITORA CRT
Budowa i zasada działania monitorów CRT, materiały liceum i studia, Informatyka liceum
Budowa i zasada działania R-123, łączność
WT - Budowa i zasada działania pompy wirowej, STRAŻ POŻARNA, Coś Do Nauki, WT
BUDOWA I ZASADA DZIAŁANIA SKANINGOWEGO MIKROSKOPU ELEKTRONOWEGO
więcej podobnych podstron