2. Modele matematyczne układów regulacji
18
2. MODELE MATEMATYCZNE UKŁADÓW REGULACJI
Rys. 2.1
Najczęściej stosowanymi modelami matematycznymi są:
- równania różniczkowe zwyczajne dla modeli ciągłych;
- równania różniczkowe cząstkowe dla układów, w których parametry obiektu zależą
również od współrzędnych przestrzennych;
- równania różnicowe dla modeli dyskretnych;
- transmitancje (Laplace’a lub z) tylko dla obiektów liniowych;
- równania stanu.
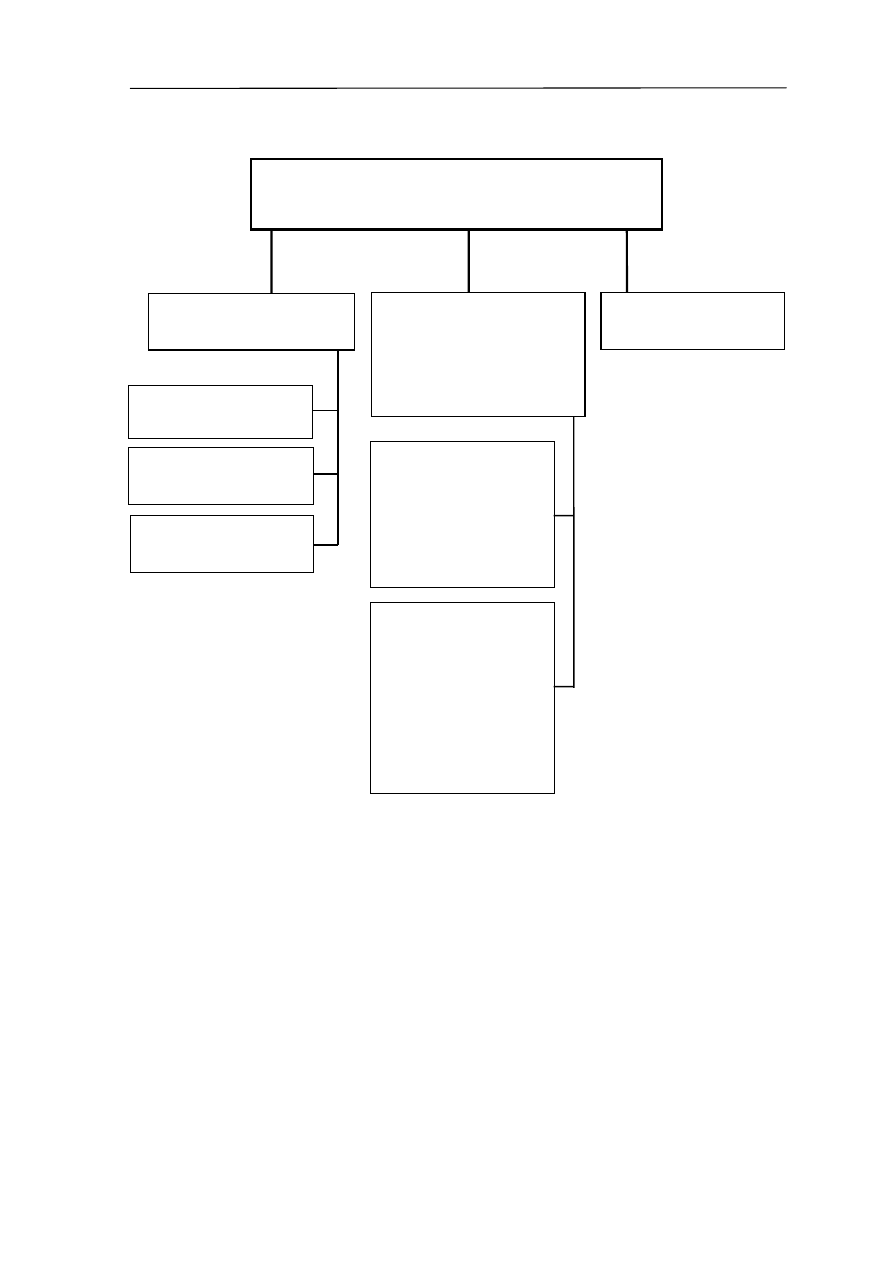
Metody wyznaczania modeli matematycznych.
eksperymentalne
(empiryczne)
- wyznaczenie charakterystyki
statycznej;
- wyznaczenie charakterystyki
dynamicznej
analityczne
(teoretyczne)
z ogólnych praw
fizycznych
zasady Hamiltona
równania Lagrange’a
analogie
elektromechaniczne
analityczno -
eksperymentalne
- eksperyment stosuje się do
wyznaczania współczynni-
ków modelu matematy-
cznego przyjętego na drodze
analitycznej.
metodami aktywnymi
(czynnymi)
Wady:
-
wyłączenie z
eksploatacji.
Zalety:
-
duża dokładność.
metodami pasywnymi
(biernymi)
Wady:
-
duża ilość
informacji;
-
pracochłonna
obróbka danych.
Zalety:
-
podczas normalnej
pracy.
2. Modele matematyczne układów regulacji
19
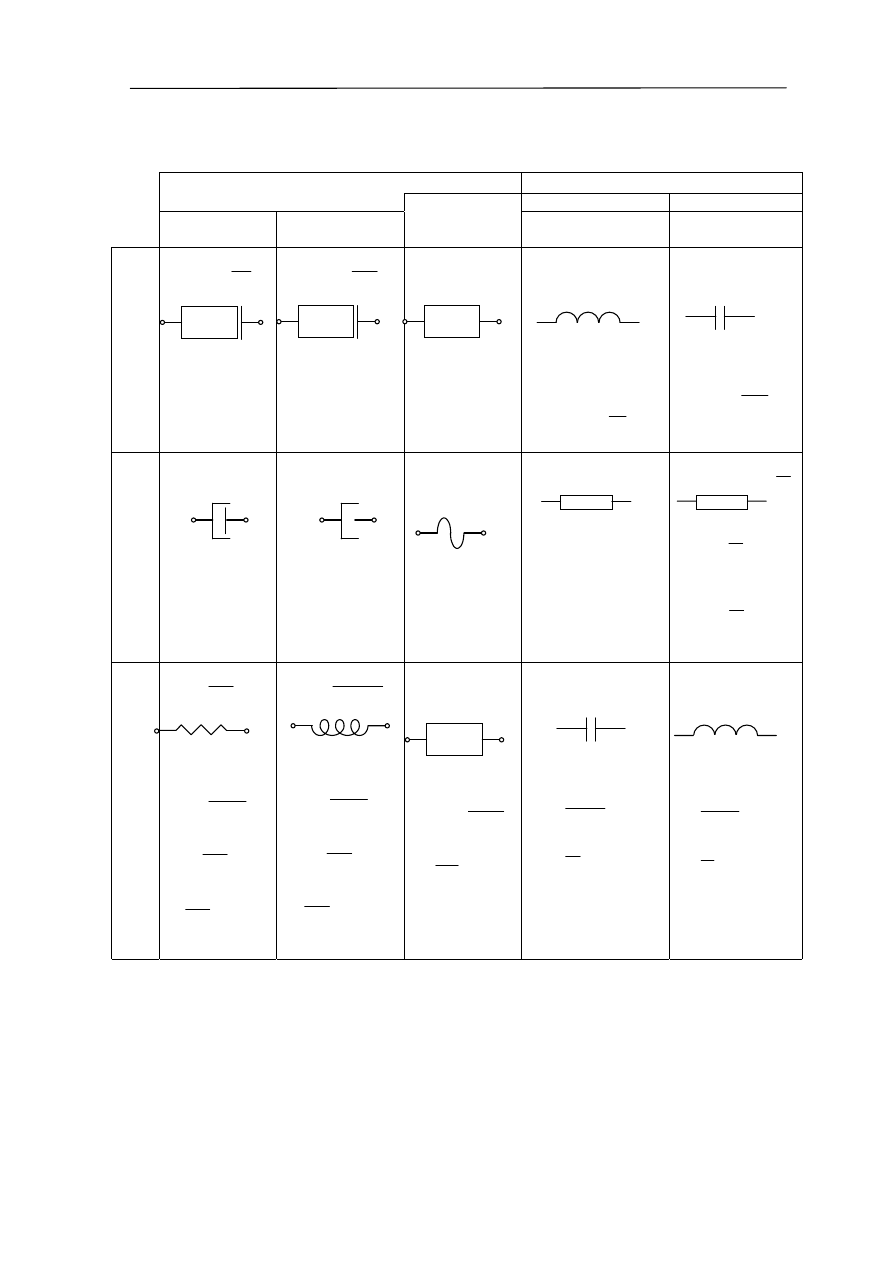
2.1. Analogie elektromechaniczne
Tabela 2.1
Człony mechaniczne
Człony elektryczne
Analogia napięciowa Analogia prądowa
Ruch postępowy
Ruch obrotowy
Człony
hydrauliczne
U→F lub M
i→v lub ω
i→ F lub M
U→v lub ω
In
ercj
a, bez
w
ładno
ść
dt
dv
m
F
=
x
mD
F
!
=
x
D
m
v
D
m
F
2
=
=
dt
d
J
M
ω
=
ϕ
!
JD
M
=
ϕ
ω
2
D
J
D
J
M
=
=
Bezwładność
h
h
h
m
V
D
m
DQ
m
p
2
=
=
∆
m lub J → L
L
LDi
U
=
dt
di
L
U
=
m lub J → C
C
dt
dU
C
i
=
Tarcie wiskot
yc
zn
e
(proporcjonaln
e do
v)
v
B
F
p
⋅
=
B
p
x
B
F
p
!
=
Dx
B
F
p
⋅
=
ω
ω
⋅
=
B
M
B
ω
ϕ
ω
!
B
M
=
ϕ
ω
⋅
⋅
=
D
B
M
Opory
przepływowe
h
h
h
r
DV
R
Q
R
p
=
=
∆
B
p
lub B
ω
→ R
R
R
i
U
⋅
=
B
p
lub B
ω
→
R
1
R
1
U
R
i
⋅
=
1
Spr
ęż
ys
to
ść
D
C
v
F
p
⋅
=
C
p
x
D
C
F
p
!
1
=
p
p
C
x
D
C
v
F
=
⋅
=
−
1
D
C
M
⋅
=
ω
ω
Cω
ϕ
!
D
C
F
p
1
=
ω
ω
ϕ
ω
C
D
C
M
=
⋅
=
−
1
Pojemność
hydrauliczna
h
h
h
c
C
V
D
C
Q
p
=
=
∆
C
p
lub C
ω
→ C
C
∫
+
=
⋅
⋅
=
0
1
1
U
dt
i
C
U
i
D
C
U
C
p
lub C
ω
→ L
L
∫
+
=
⋅
⋅
=
0
1
1
I
dt
U
L
i
U
D
L
i
Obiekty zbudowane są z elementów zwanych w automatyce członami. Człony mogą
być mechaniczne i elektryczne. Człony mechaniczne dotyczą ruchu postępowego i
obrotowego, natomiast w członach elektrycznych występuje dualizm pomiędzy analogami
(odpowiednikami) napięciowymi i analogami prądowymi.
Stosując metody prądów oczkowych w elektrotechnice wyznaczamy układ równań dla
prądów w poszczególnych oczkach stosując zawsze prawoskrętny kierunek prądu.
Podobnie dla układów mechanicznych konstruujemy układ równań dla poszczególnych
prędkości w układzie.
m
J
8
m
h
C
h
R
h
2. Modele matematyczne układów regulacji
20
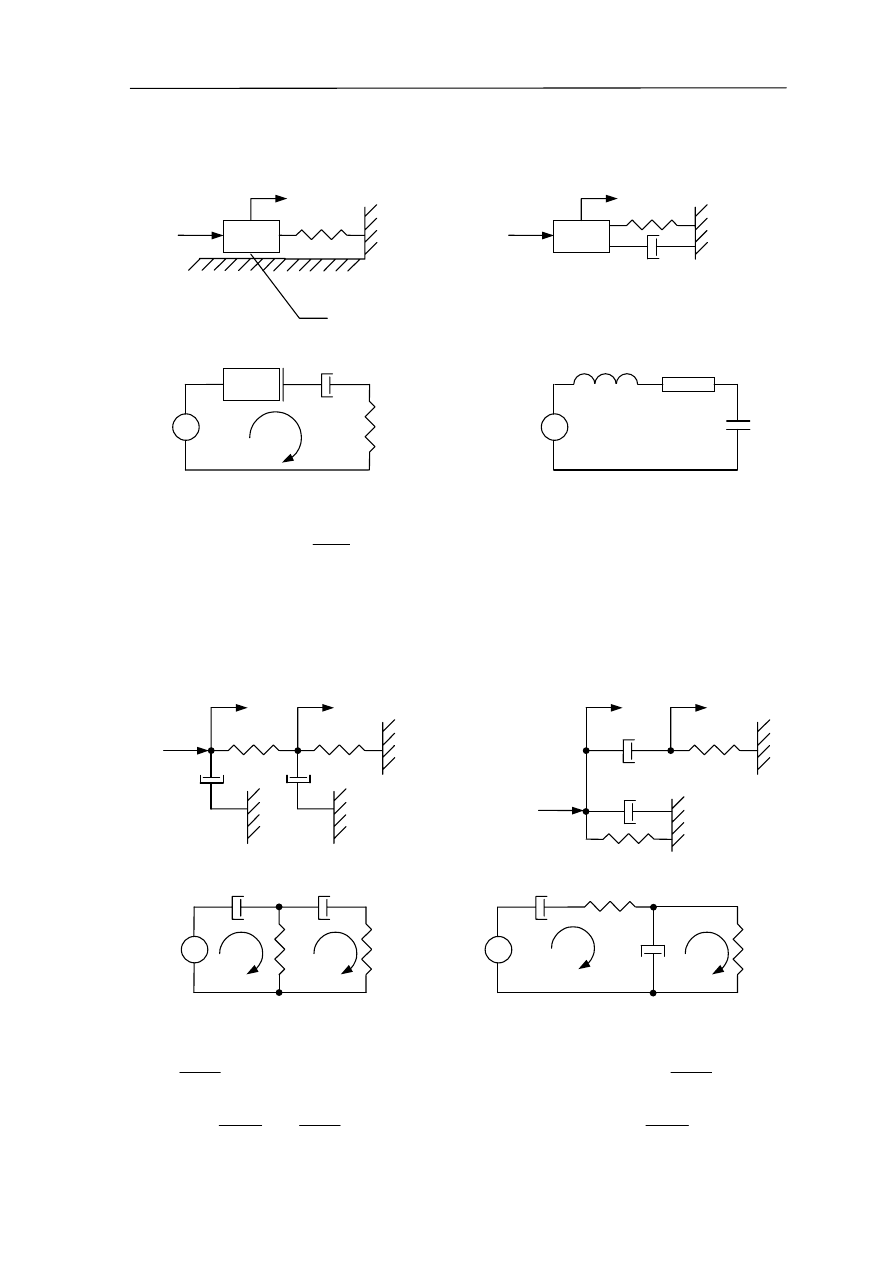
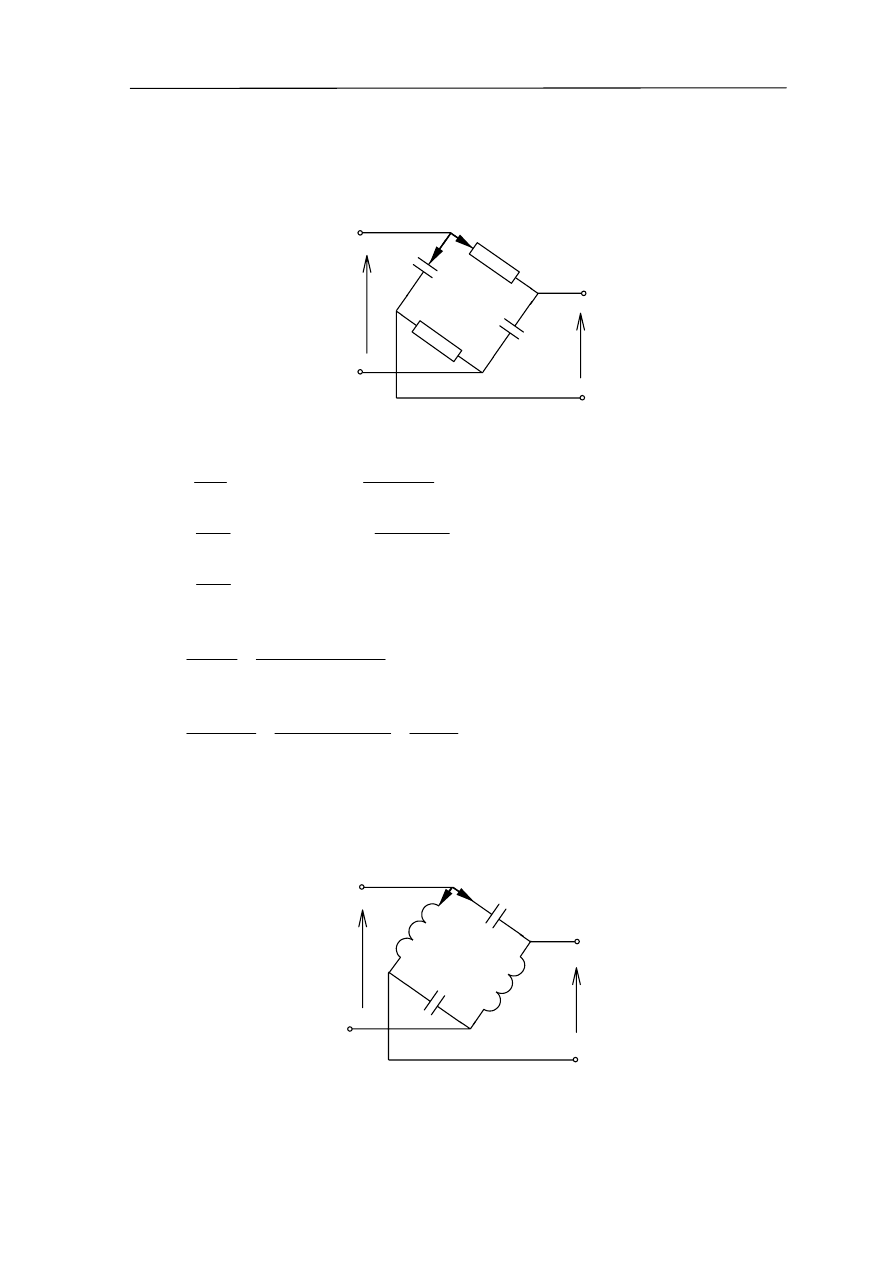
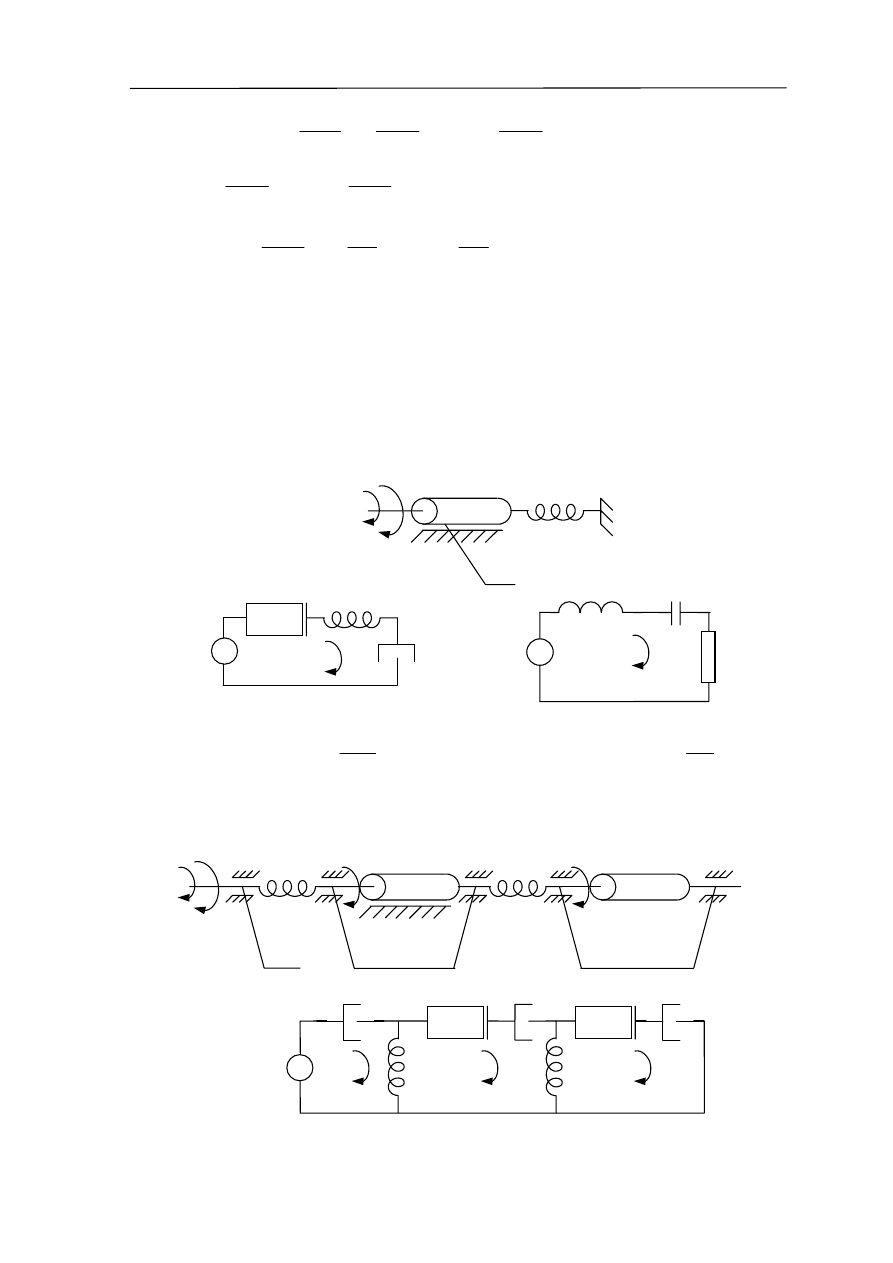
Przykład 2.1
Zbudować model matematyczny układu i jego analog napięciowy.
Rys. 2.1
( )
x
D
C
x
B
x
mD
t
F
p
p
!
!
!
1
+
+
=
m → L
B
p
→ R
C
p
→ C
Przykład 2.2
Zbudować model matematyczny układu a) i b) oraz jego analog napięciowy.
a)
b)
Rys. 2.2
( )
(
)
1
1
2
1
1
1
x
B
x
x
D
C
t
F
p
p
!
!
!
+
−
=
( )
(
)
1
1
2
1
2
1
1
1
x
D
C
x
x
B
x
B
t
F
p
p
p
!
!
!
!
+
−
+
=
(
)
1
2
1
2
2
2
2
1
1
0
x
x
D
C
x
D
C
x
B
p
p
p
!
!
!
!
−
+
+
=
(
)
2
2
1
2
2
1
0
x
D
C
x
x
B
p
p
!
!
!
+
−
=
m
x
F(t)
B
p
C
p
m
x
F(t)
B
p
C
p
E(t)
L
R
C
x
2
F(t)
B
p2
C
p1
C
p2
x
1
B
p1
x
2
F(t)
B
p2
C
p1
C
p2
x
1
B
p1
m
B
p
C
p
F(t)
x!
B
p1
C
p1
F(t)
B
p2
C
p2
1
x!
2
x!
B
p1
C
p1
F(t)
B
p2
C
p2
1
x!
2
x!
2. Modele matematyczne układów regulacji
21
2.2. Metoda prądów oczkowych (II prawo Kirchoffa)
Drugie prawo Kirchoffa (zwane też bilansem napięć w oczku) mówi, że w każdym
zamkniętym obwodzie elektrycznym, zwanym oczkiem, suma algebraiczna napięć
źródłowych E
i
równa się sumie algebraicznej spadków napięć na impedancjach.
Przykład 2.3
Stosując metodę prądów oczkowych zbudować model matematyczny obwodu (rys.2.3.).
1
2
2
2
1
2
3
1
1
1
1
i
R
Di
L
Di
L
i
R
i
R
U
+
−
+
−
=
1
1
3
1
3
1
1
0
i
R
i
R
i
D
C
−
+
=
1
2
2
2
2
2
1
0
Di
L
Di
L
i
D
C
−
+
=
1
2
2
2
2
1
i
R
i
D
C
U
+
=
Rys. 2.3
Przykład 2.4
Stosując metodę prądów oczkowych wyznaczyć równanie wejść
( )
1
i
f
e
=
i wyjść
( )
1
i
f
U
=
(
)
2
1
1
1
2
1
i
i
D
C
i
R
e
−
+
=
(1)
(
)
1
2
1
2
2
2
1
1
1
0
i
i
D
C
i
D
C
i
R
−
+
+
=
(2)
z równania (2)
D
C
C
C
C
R
i
D
C
i
2
1
1
1
2
1
1
2
1
+
+
=
1
2
1
2
1
2
2
2
1
1
1
1
2
1
1
i
D
C
C
C
C
R
D
C
i
D
C
i
R
e
+
+
−
+
=
1
2
2
2
1
i
R
i
D
C
U
+
=
1
2
1
2
1
2
1
2
2
1
2
1
i
R
i
D
C
C
C
C
R
D
C
C
U
+
+
+
=
L
2
C
2
R
2
i
1
U
1
i
2
i
3
R
1
C
1
U
2
C
2
R
2
i
1
e
i
2
R
1
C
1
U
C
2
R
2
i
1
e
R
1
C
1
U
i
2
Rys. 2.4
2. Modele matematyczne układów regulacji
22
Przykład 2.5
Zbudować model matematyczny i wyznaczyć transmitancję operatorową G(D) dla układu
mostkowego RC jak na rysunku 2.5. Spadki napięć są zawsze przeciwne do kierunku
przepływy prądu.
Rys. 2.5
1
1
)
(
1
1
1
1
1
1
1
1
1
1
+
=
→
+
=
D
C
R
D
C
U
i
i
R
i
D
C
D
U
1
1
)
(
2
2
2
1
2
2
2
2
2
2
+
=
→
+
=
D
C
R
D
C
U
i
i
R
i
D
C
D
U
1
1
2
2
2
1
)
(
i
R
i
D
C
D
U
−
=
i
1
i i
2
podstawiamy do równania U
2
( )
(
)(
)
1
1
1
)
(
)
(
2
1
2
2
1
1
2
+
+
−
=
=
D
T
D
T
D
T
T
D
U
D
U
D
G
dla T
1
= T
2
( )
(
)(
)
(
)(
)
TD
TD
TD
TD
TD
TD
D
T
D
T
D
G
+
−
=
+
+
−
+
=
+
−
=
1
1
1
1
1
1
1
1
2
2
2
2
2
2
2
1
1
1
,
C
R
T
C
R
T
=
=
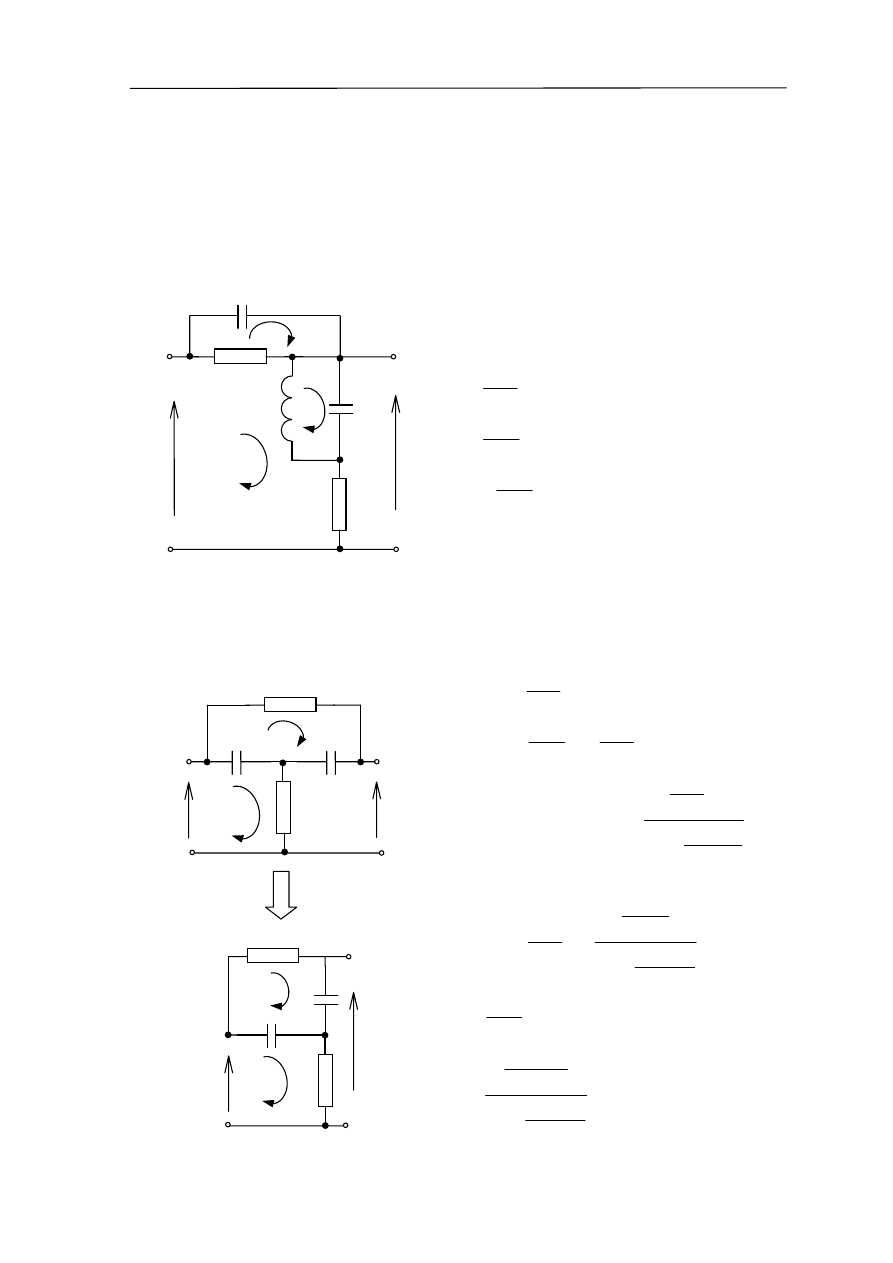
Przykład 2.6
Zbudować model matematyczny i wyznaczyć transmitancję operatorową dla układu
rysunku 2.6.
Rys. 2.6
C
2
R
2
i
1
R
1
C
1
U
1
i
2
U
2
C
L
i
1
C
U
1
i
2
U
2
L
2. Modele matematyczne układów regulacji
23
2
1
1
1
1
1
i
LD
CD
U
i
CD
LD
U
+
=
+
=
1
1
2
1
1
2
1
+
=
+
=
→
=
LCD
CD
U
CD
LD
U
i
i
i
1
2
2
2
1
2
2
1
2
1
1
1
1
1
U
LCD
LCD
LCD
CD
U
CD
LD
U
i
CD
LDi
U
+
−
=
+
−
=
−
=
( )
1
1
2
2
2
2
+
−
=
D
T
D
T
D
G
gdzie
LC
T
=
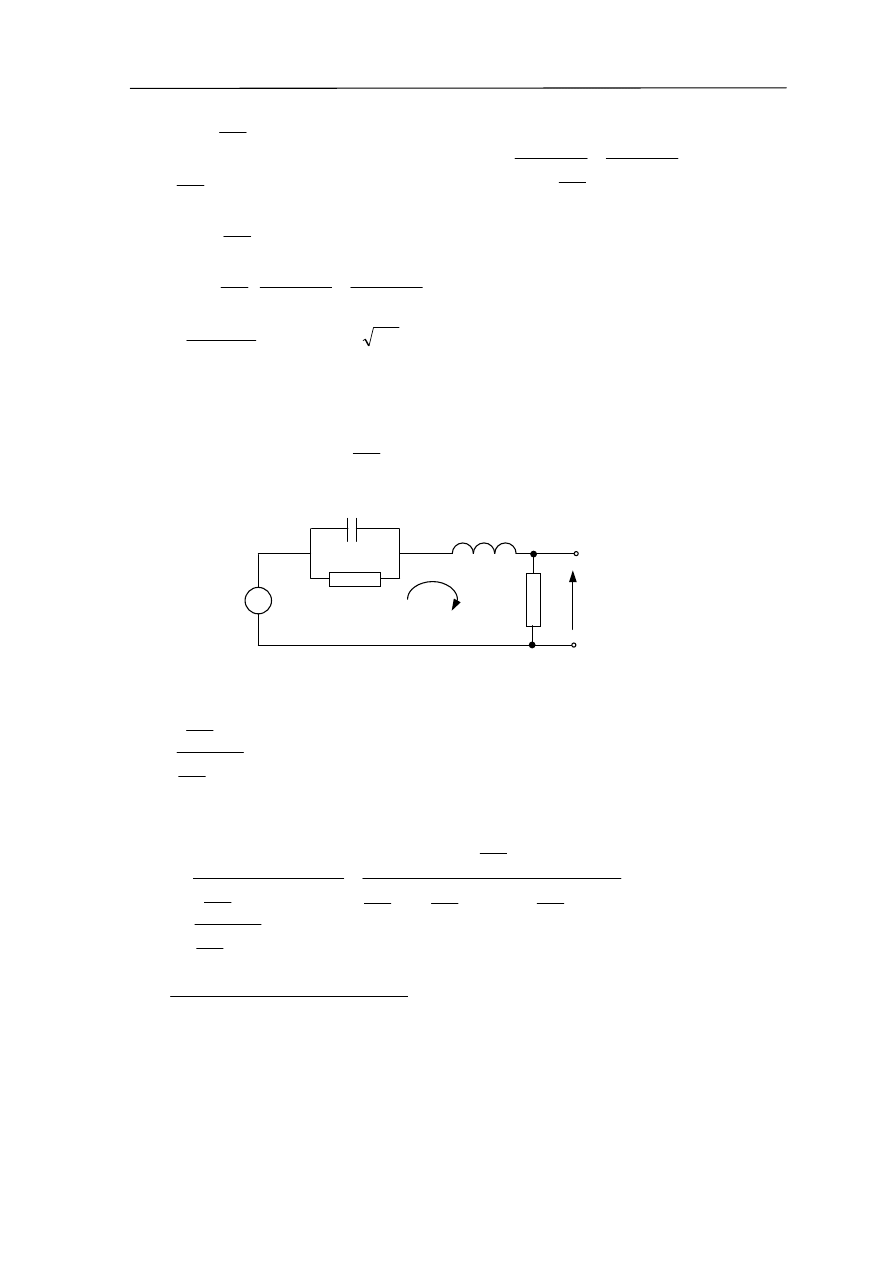
Przykład 2.7
Zbudować model matematyczny
( )
1
2
U
f
U
=
, zakładając że C i R
1
to połączenie
równoległe dwóch impedancji
CD
1
i R
1
.
Rys. 2.7
i
R
LD
R
CD
R
CD
U
+
+
+
=
2
1
1
1
1
1
2
1
2
1
1
1
1
2
2
1
1
1
2
2
2
2
1
1
1
1
R
R
CD
R
D
LR
CD
LD
R
CD
R
CD
U
R
R
LD
R
CD
R
CD
U
R
U
i
R
U
+
+
+
+
+
=
+
+
+
=
=
1
2
1
2
1
1
2
1
2
2
U
R
R
R
D
LCR
LD
R
CD
R
R
D
CR
U
+
+
+
+
+
=
U
1
U
2
i
L
R
1
C
R
2
2. Modele matematyczne układów regulacji
24
2.3. Modele matematyczne układów mechanicznych
Przykład 2.8
Zbudować model matematyczny obiektu pokazanego na rysunku 2.8.
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
2
3
2
2
3
2
3
2
3
2
2
1
2
1
3
2
2
1
2
1
2
1
2
1
1
2
1
1
1
0
1
1
0
1
)
(
x
x
D
C
x
x
B
x
D
m
x
x
B
x
x
B
x
x
D
C
x
x
D
C
x
D
m
x
x
B
x
x
D
C
t
F
p
p
p
p
p
p
p
p
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
−
+
−
+
=
−
+
−
+
−
+
−
+
=
−
+
−
=
Rys. 2.8
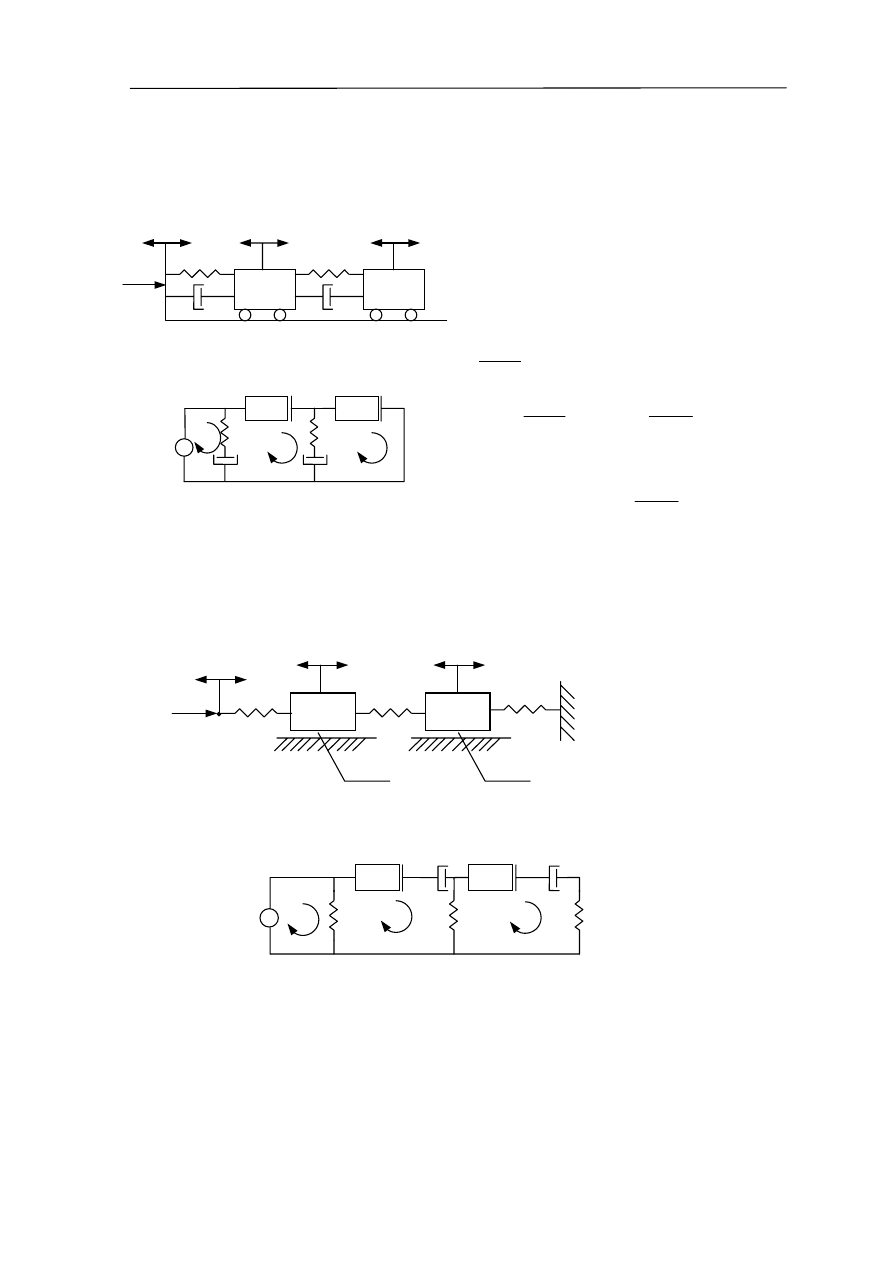
Przykład 2.9
Zbudować model matematyczny obiektu pokazanego na rysunku 2.9.
Rys. 2.9
x
3
x
2
x
1
B
p
B
p
F(t)
C
p
C
p
C
p3
x
3
x
2
B
p2
B
p1
F(t)
C
p2
C
p1
m
1
m
2
x
1
3
x!
1
x!
2
x!
C
p3
B
p2
B
p1
C
p2
C
p1
m
1
m
2
F(t)
3
x!
2
x!
1
x!
B
p2
B
p1
C
p2
C
p1
m
1
m
2
F(t)
2. Modele matematyczne układów regulacji
25
(
)
(
)
(
)
(
)
2
3
2
3
3
3
2
3
2
3
2
2
1
2
1
2
1
2
1
2
1
1
1
1
0
1
1
0
1
)
(
x
x
D
C
x
D
C
x
B
x
D
m
x
x
D
C
x
x
D
C
x
B
x
D
m
x
x
D
C
t
F
p
p
p
p
p
p
p
!
!
!
!
!
!
!
!
!
!
!
!
!
−
+
+
+
=
−
+
−
+
+
=
−
=
Powyższe równanie można również zapisać w postaci:
(
)
(
)
(
)
(
)
=
+
−
+
+
=
−
+
−
+
+
=
−
0
1
1
0
1
1
1
3
3
2
3
2
3
2
3
2
3
2
2
1
2
1
2
1
2
1
2
1
1
x
C
x
x
C
x
B
x
m
x
x
C
x
x
C
x
B
x
m
F
x
x
C
p
p
p
p
p
!
!!
!
!!
Przykład 2.10
Zbudować model matematyczny obiektu jak na rysunku 2.10.
Rys. 2.10
C
p4
C
p5
C
p1
x
3
x
2
C
p3
C
p2
x
1
F(t)
m
1
m
2
m
3
B
p1
B
p2
1
x!
2
x!
3
x!
C
p5
C
p4
C
p3
B
p2
B
p1
C
p2
C
p1
m
1
m
2
F(t)
m
3
2. Modele matematyczne układów regulacji
26
( )
(
)
(
)
(
)
(
)
(
)
(
)
1
3
4
2
3
3
3
5
2
3
3
2
3
1
2
2
2
2
3
1
4
2
1
2
1
1
1
1
1
1
1
1
1
0
1
1
0
1
1
1
x
x
C
x
x
C
x
D
C
B
D
m
x
x
D
C
x
x
D
C
x
D
m
x
x
D
C
x
x
D
C
x
D
C
x
B
x
D
m
t
F
p
p
p
p
p
p
p
p
p
p
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
−
+
−
+
+
+
=
−
+
−
+
=
−
+
−
+
+
+
=
Powyższe równanie można również zapisać w postaci:
(
)
(
)
(
)
(
)
(
) (
)
0
0
3
5
2
3
3
1
3
4
3
2
3
3
1
2
2
3
2
3
2
2
1
1
3
1
4
2
1
2
1
1
1
1
=
+
−
+
−
+
+
=
−
+
−
+
=
+
−
+
−
+
+
x
k
x
x
k
x
x
k
x
B
x
m
x
x
k
x
x
k
x
m
F
x
k
x
x
k
x
x
k
x
B
x
m
p
p
!
!!
!!
!
!!
Przykład 2.11
Zbudować model matematyczny obiektu jak na rysunku 2.11.
Rys. 2.11
ω
ω
ω
D
C
B
JD
t
M
w
w
1
)
(
+
+
=
i
CD
Ri
LDi
t
U
1
)
(
+
+
=
Przykład 2.12
Zbudować model matematyczny obiektu jak na rysunku 2.12.
Rys. 2.12
ω
M(t)
J
C
w
B
w
J
8
ω
M(t)
C
w
B
w
J→L
C
w
→C
B
w
→R
ω→i
U(t)
ω
3
M(t)
J
1
C
w2
B
w2
J
2
C
w1
ω
1
ω
2
B
w1
B
w3
J
2
ω
2
M(t)
C
w
B
w
8
8
J
1
8
B
w2
B
w3
C
w2
ω
3
ω
1
2. Modele matematyczne układów regulacji
27
( )
0
1
1
0
1
1
1
1
1
1
2
2
3
2
3
2
3
2
1
1
2
2
1
2
1
2
1
1
1
1
=
−
+
+
=
−
−
+
+
+
=
−
+
ω
ω
ω
ω
ω
ω
ω
D
C
D
C
B
D
J
D
C
D
C
D
C
D
C
B
D
J
t
M
D
C
D
C
B
w
w
w
w
w
w
w
w
w
w
w
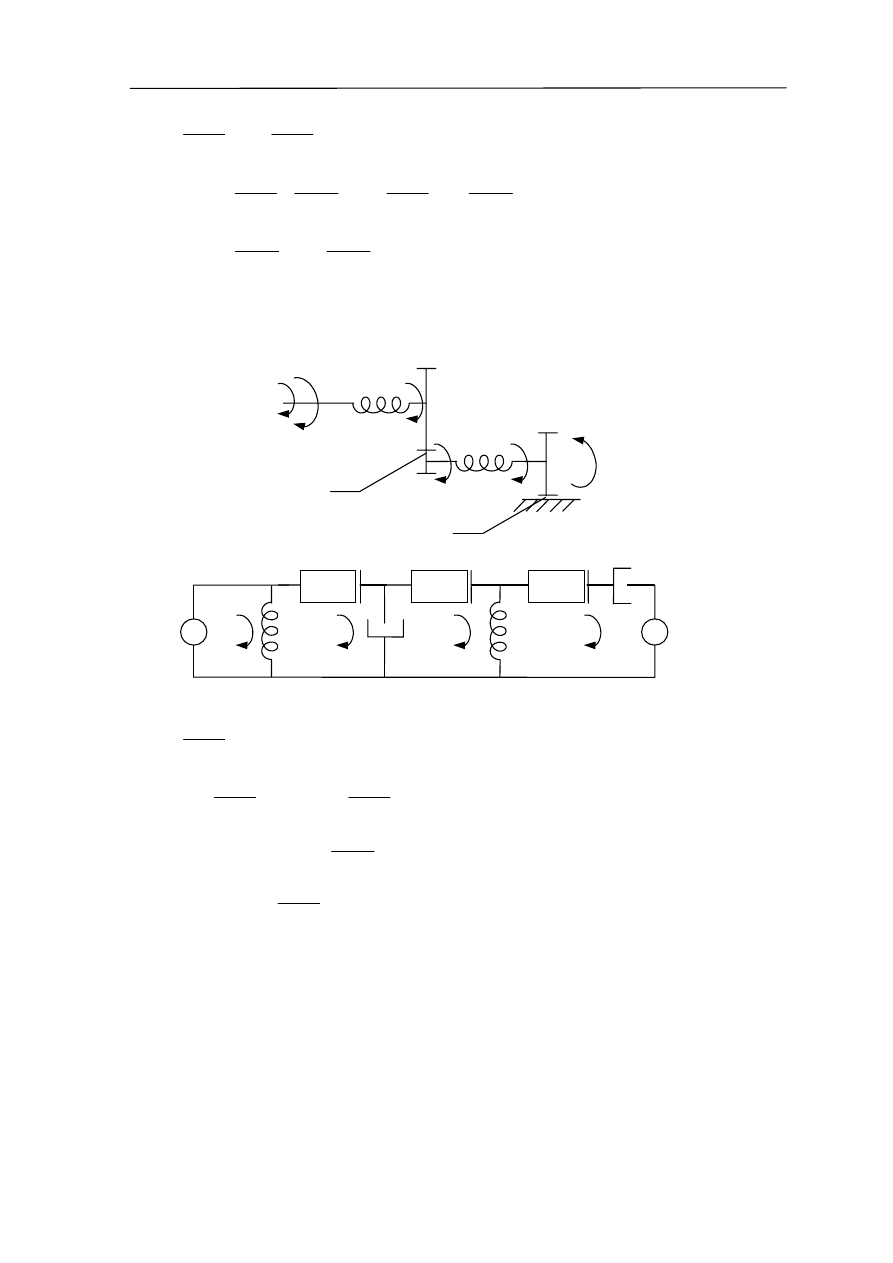
Przykład 2.13
Zbudować model matematyczny obiektu jak na rysunku 2.13.
Rys. 2.13
( )
(
)
3
1
1
1
2
1
1
1
2
1
1
1
1
0
1
ω
ω
ω
ω
ω
w
w
w
w
w
B
D
C
B
D
C
D
J
D
C
t
M
−
−
+
+
=
−
=
(
)
(
)
(
)
(
)
o
w
w
w
w
M
D
C
B
D
J
D
C
D
J
B
+
−
+
+
=
−
+
+
−
=
3
4
2
4
3
3
4
3
2
3
2
2
3
1
1
0
1
0
ω
ω
ω
ω
ω
ω
ω
ω
ω
2
M(t)
C
w1
B
w1
ω
1
C
w2
ω
4
ω
3
M
o
B
w2
J
1
J
2
J
3
J
3
ω
2
M(t)
C
w1
B
w1
8
8
J
1
B
w3
C
w2
ω
4
ω
1
J
2
ω
3
M
o
2. Modele matematyczne układów regulacji
28
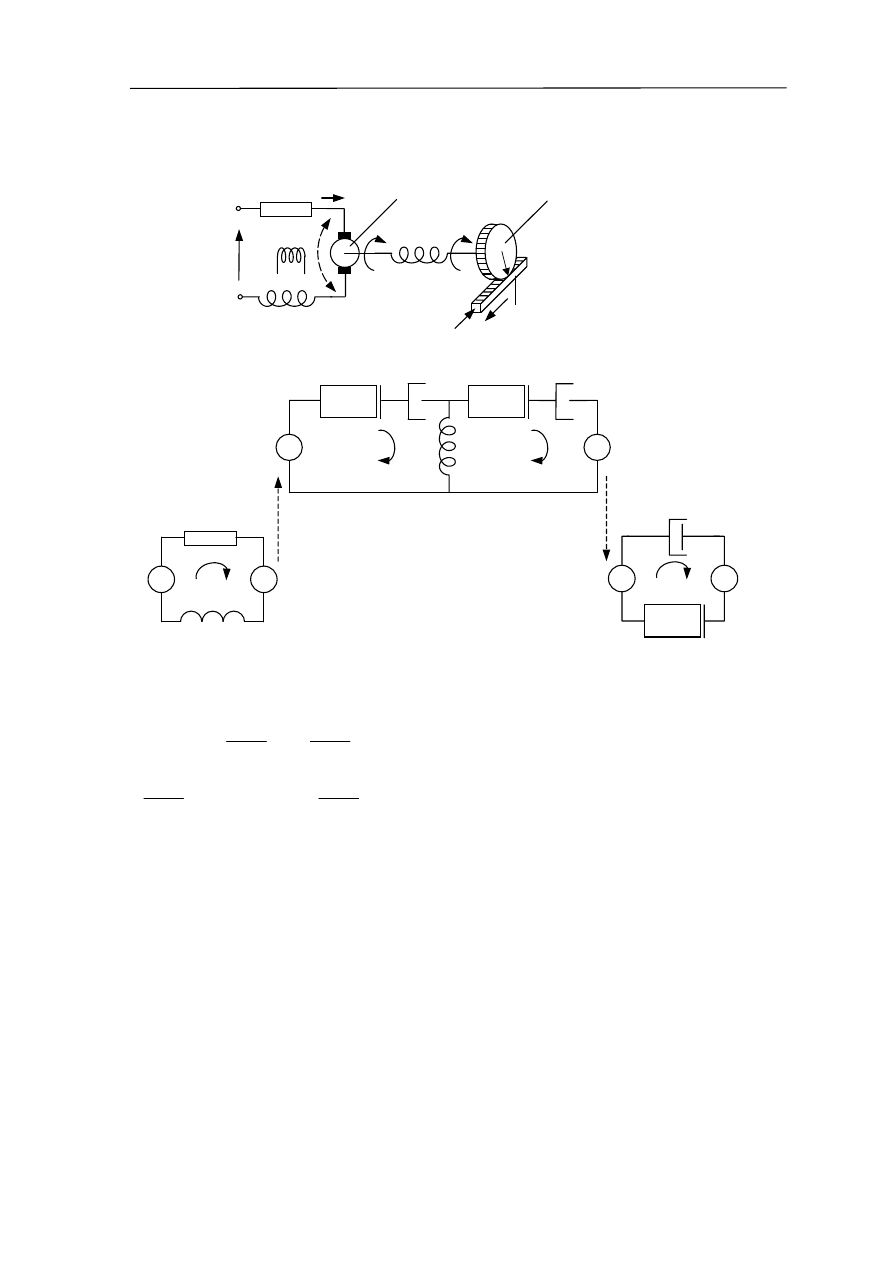
Przykład 2.14
Zbudować model matematyczny obiektu jak na rysunku 2.14.
Rys. 2.14
(
)
( )
t
M
D
C
D
C
B
D
J
e
e
i
D
L
R
w
w
w
w
w
w
w
=
−
+
+
−
=
+
2
1
1
1
1
1
1
1
ω
ω
(
)
1
0
1
1
2
2
1
2
2
1
1
0
1
1
f
f
v
B
D
m
M
D
C
B
D
J
D
C
x
p
w
w
w
=
+
+
=
+
+
+
+
−
ω
ω
równania więzów:
M
2
= f
0
R
R
v
x
2
ω
=
( )
1
ω
k
e
ki
t
M
w
w
=
=
gdzie
k
- stała silnika wynikająca z jego parametrów konstrukcyjnych.
e
R
w
I
w
e
w
L
w
f
o
ω
2
ω
1
C
w1
J
2
,B
w2
J
1
,B
w1
m
1
,B
p1
v
x
J
2
ω
2
M(t)
C
w1
B
w1
8
J
1
8
B
w2
ω
1
M
2
e
R
w
i
w
e
w
L
w
m
f
o
B
p1
v
x
f
1
R
R
v
R
f
M
x
2
0
2
ω
=
=
( )
1
ω
k
e
ki
t
M
w
w
=
=
2. Modele matematyczne układów regulacji
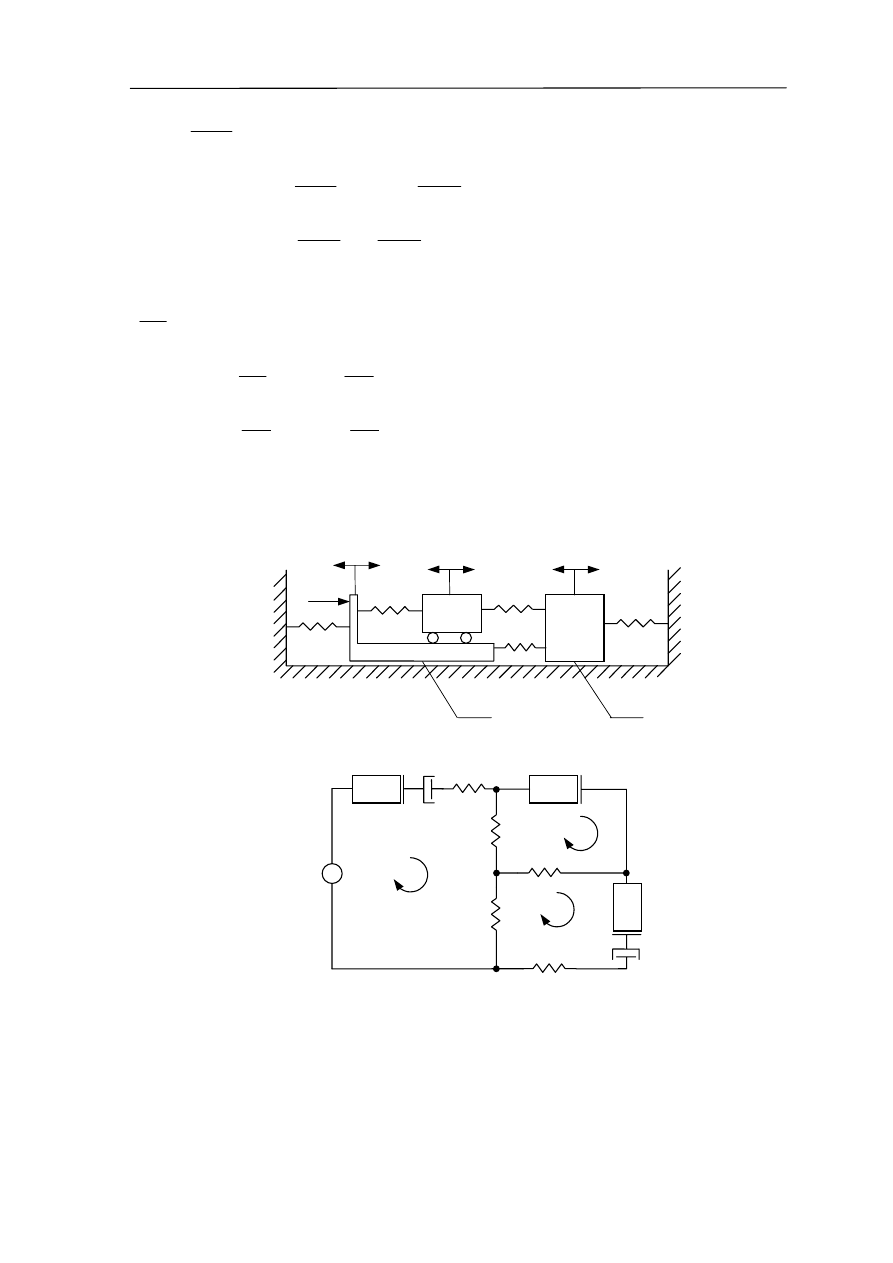
29
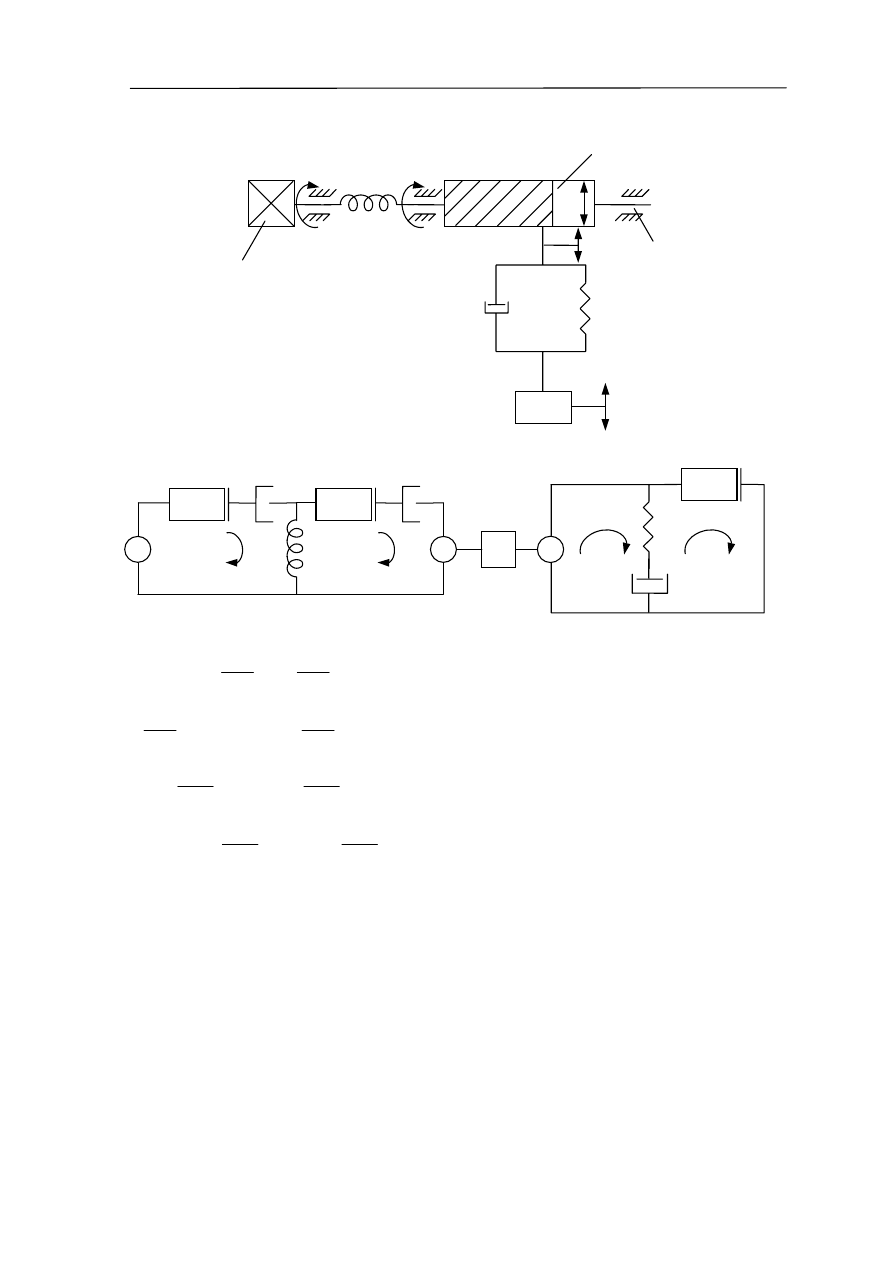
Przykład 2.15
Zbudować model matematyczny obiektu jak na rysunku 2.15.
Rys. 2.15
0
1
1
1
1
0
2
1
1
1
1
1
2
1
1
1
=
+
+
+
+
−
=
−
+
+
M
D
C
B
D
J
D
C
M
D
C
D
C
B
D
J
s
s
s
ω
ω
ω
ω
0
1
1
1
1
1
2
2
2
2
0
2
2
1
2
2
=
+
−
+
+
=
+
−
+
x
D
C
B
x
D
C
B
mD
f
x
D
C
B
x
D
C
B
!
!
!
!
równania więzów:
M
0
= f
0
R
2
1
ω
R
x
=
!
m
M
s
,J
s
,B
s
ω
2
ω
1
C
1
B
2
C
2
J
1
B
1
2R
x
x
1
J
1
ω
2
M
s
C
1
B
1
8
J
s
8
B
s
ω
1
M
0
m
f
0
B
2
C
2
1
x!
x!
R
2
1
ω
R
x
=
!
Wyszukiwarka
Podobne podstrony:
Modele matematyczne układów elementarnych mod mat
matematyka podstawowe wzory i Nieznany
Matematyka zaawansowana rroznic Nieznany
Badanie podstawowych ukladow cy Nieznany (2)
matematyka 1(4) id 284045 Nieznany
modelowanie ukladow przelaczaja Nieznany
Matematyka dyskretna opracowani Nieznany
2 Badanie ukladow dopasowania i Nieznany
Matematyka 4 id 283195 Nieznany
06 Analizowanie ukladow elektry Nieznany (2)
Matematyka 5 id 283204 Nieznany
modele matematyczne opory sedymentacja
IMW W03 Modelowanie ukladow id Nieznany
Zespolenia wrotno ukladowe u ps Nieznany
Edukacja matematyczna 4 id 1503 Nieznany
więcej podobnych podstron