
Po l i t e c h n i k a L u b e l s k a , Wy d z i a ł Me c h a n i c z n y
Katedra Automatyzacji
u l . Nad b ys tr zy c k a 3 6, 2 0-6 1 8 L ub l i n
te l . /fa x .:(+4 8 81 ) 53 8 42 6 7 e -ma i l :a u to mat @po l l u b .p l ; wm. ka @po l l ub .p l
LABORATORIUM
PODSTAW ROBOTYKI
Instrukcja do ćwiczenia nr
R4
BADANIE WŁAŚCIWOŚCI NAPĘDU Z
SILNIKIEM KROKOWYM
Wydział Mechaniczny
Sala 406


Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
1
Cel ćwiczenia
Celem dydaktycznym jest zapoznanie z budową i różnymi sposobami sterowania
silników krokowych.
Celem praktycznym jest poprawne podłączenie silnika krokowego do sterownika i
generatora sygnału prostokątnego oraz zbadanie momentu obrotowego w funkcji prędkości
obrotowej.
Wiadomości podstawowe
Silniki elektryczne stanowią dużą grupę napędów zwłaszcza w przemyśle
maszynowym oraz systemach produkcyjnych. Spośród tej szerokiej grupy możemy wyróżnić
silniki krokowe. Ich nazwa pochodzi od angielskiego słowa stepper motor (ang. step-krok)
i odnosi się do rodzaju ruchu jaki wykonuje wał silnika. Równoważnie używa się także nazwy
silnik skokowy. Głównymi cechami charakteryzującymi omawiane silniki są przede
wszystkim precyzja w pozycjonowaniu, korzystny stosunek generowanego momentu
obrotowego do rozmiarów oraz możliwość sterowania pozycją wału silnika w torze otwartym.
Te właściwości spowodowały, że znalazły one zastosowanie zarówno w gałęziach
automatyki, robotyki jak i przemyśle motoryzacyjnym oraz zbrojeniowym. Poszukując silnika
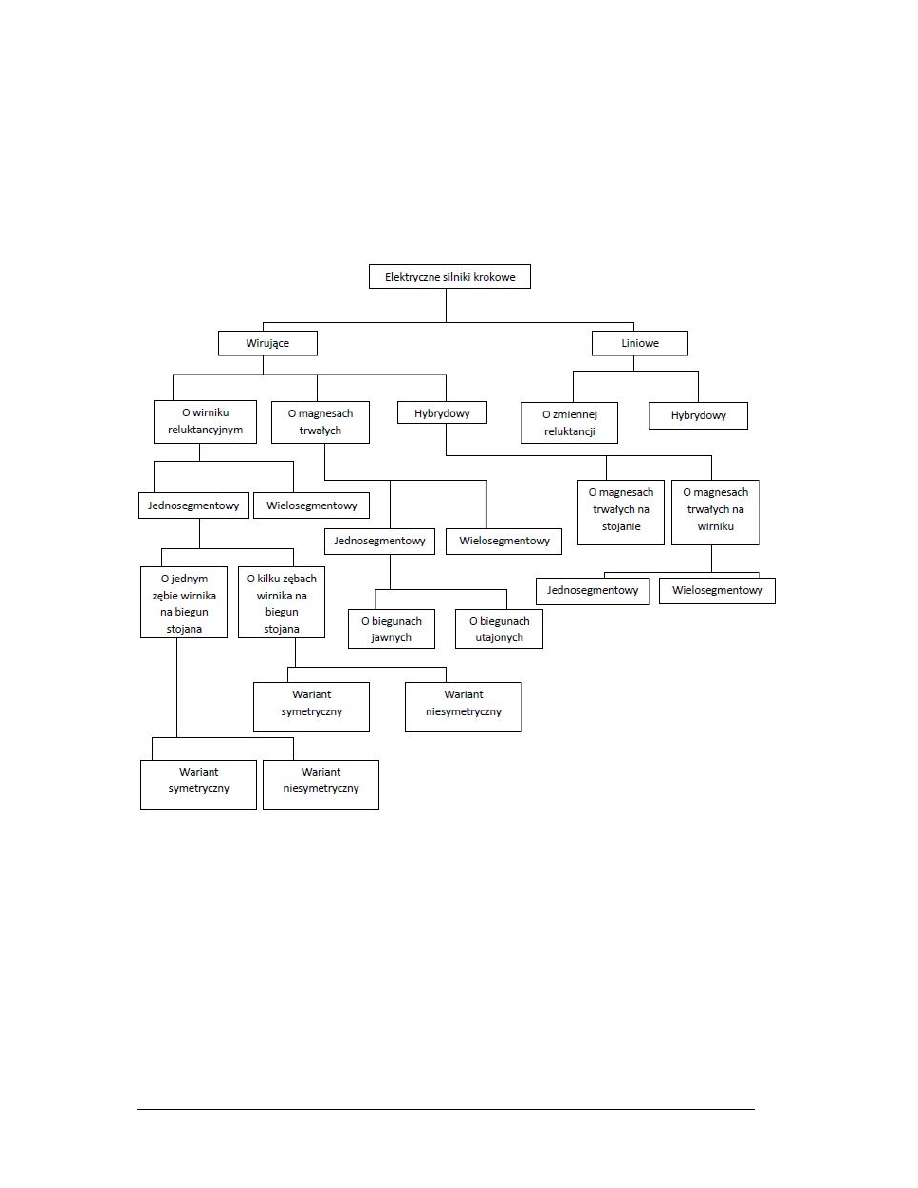
do konkretnej aplikacji warto zapoznać się z dostępnymi rodzajami. Klasyfikacje silników
krokowych przedstawiono na rys.1.
Istotną gałęzią silników krokowych są silniki hybrydowe. Łączą bowiem w sobie
cechy silników z magnesem trwałym i silników o zmiennej reluktancji. Jednak lepsza jakość
determinuje wyższą cenę. Biorąc pod uwagę precyzyję działania tego rodzaju silników ich
użycie jest wręcz konieczne w obrabiarkach sterowanych numerycznie, sprzęcie medycznym
oraz w innych aplikacjach wymagających wysokiej precyzji pozycjonowania.
Silnik krokowy opiera swoje działanie na wzajemnym oddziaływaniu biegunów.
Magnes posiada dwa bieguny N (ang. North – północny) oraz S (ang. South – południowy).
Bieguny jednoimienne odpychają się, natomiast różnoimienne przyciągają. Identyczne
zachowanie zostanie zaobserwowane w przypadku zastosowania magnesu i elektromagnesu.
W elektromagnesie zmiana kierunku płynącego prądu jest równoznaczna z zamianą
Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
2
biegunów. Trwałe namagnesowanie rotora wpływa na zwiększenie indukcji magnetycznej
zwiększając jednocześnie moment obrotowy, jaki wytwarza silnik.
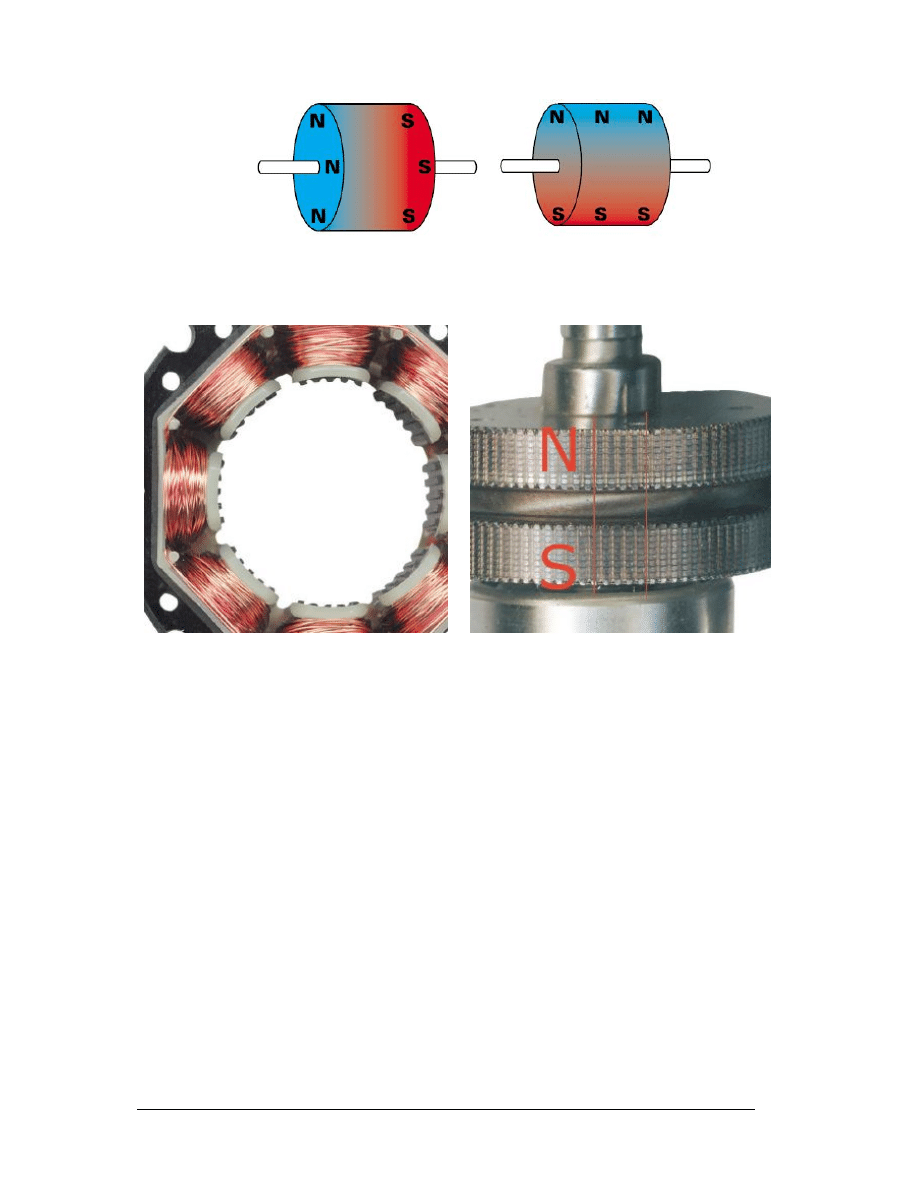
Wirnik zbudowany jest z magnesu z naciętymi zębami, jednak jego bieguny nie są
rozmieszczone promieniowo (jak w silniku z magnesem trwałym), a osiowo (rys.2).
Rys. 1. Klasyfikacja silników krokowych [1]
Stojan na swojej powierzchni wewnętrznej posiada odpowiednio rozmieszczone
rowki, których zadaniem jest pokrycie się z właściwym zębem rotora. Podobnie jak w silniku
o zmiennej reluktancji strumień magnetyczny jest największy, jeśli magnetowód zamknie się
przy najmniejszym oporze magnetycznym. Dodatkowo moment reluktancyjny jest
wzmacniany przez już namagnesowany wirnik. Na rys. 3 i 4 przedstawione zostały stojan
oraz wirnik silnika hybrydowego.
Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
3
Rys.2. Rysunek poglądowy wirnik silnika krokowego: a) hybrydowego. b) z magnesem trwałym [2]
Rys.3.Budowa stojana silnika hybrydowego [2]
Rys.4 Budowa wirnika silnika hybrydowego [2]
Silnik krokowy może mieć różną wartość kąta skoku oraz momentu obrotowego w
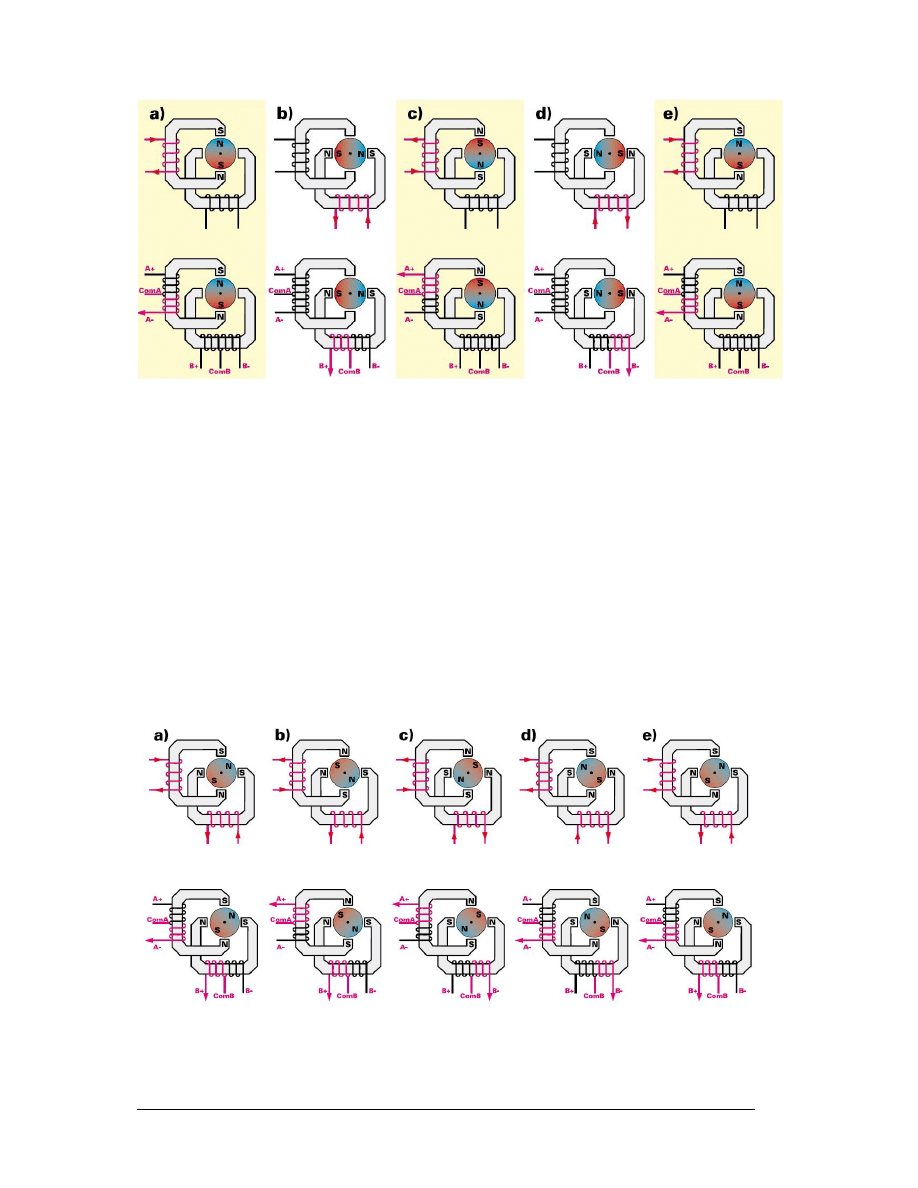
zależności od programu realizowanego przez układ sterujący. Sterowanie falowe jest
najprostszym sposobem sterowania silników krokowych, posiada jednak kilka wad. W
każdym takcie cyklu zasilana jest tylko połowa uzwojeń silnika (rys.5). Naprzemienne
zasilanie cewek skutkuje wykorzystaniem jedynie połowy możliwości silnika, co
uniemożliwia uzyskanie dużego momentu obrotowego.
Sterowanie pełnokrokowe wykorzystuje jednocześnie wszystkie cewki silnika
krokowego. Dzięki temu moment obrotowy jest 2 razy większy względem sterowania
falowego a pozycja wirnika jest stale przesunięta o ½ kroku w stosunku do sterowania
falowego (rys 6).
Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
4
Rys 5. Schemat zasilania cewek silników uni i bipolarnych przy sterowaniu falowym [3].
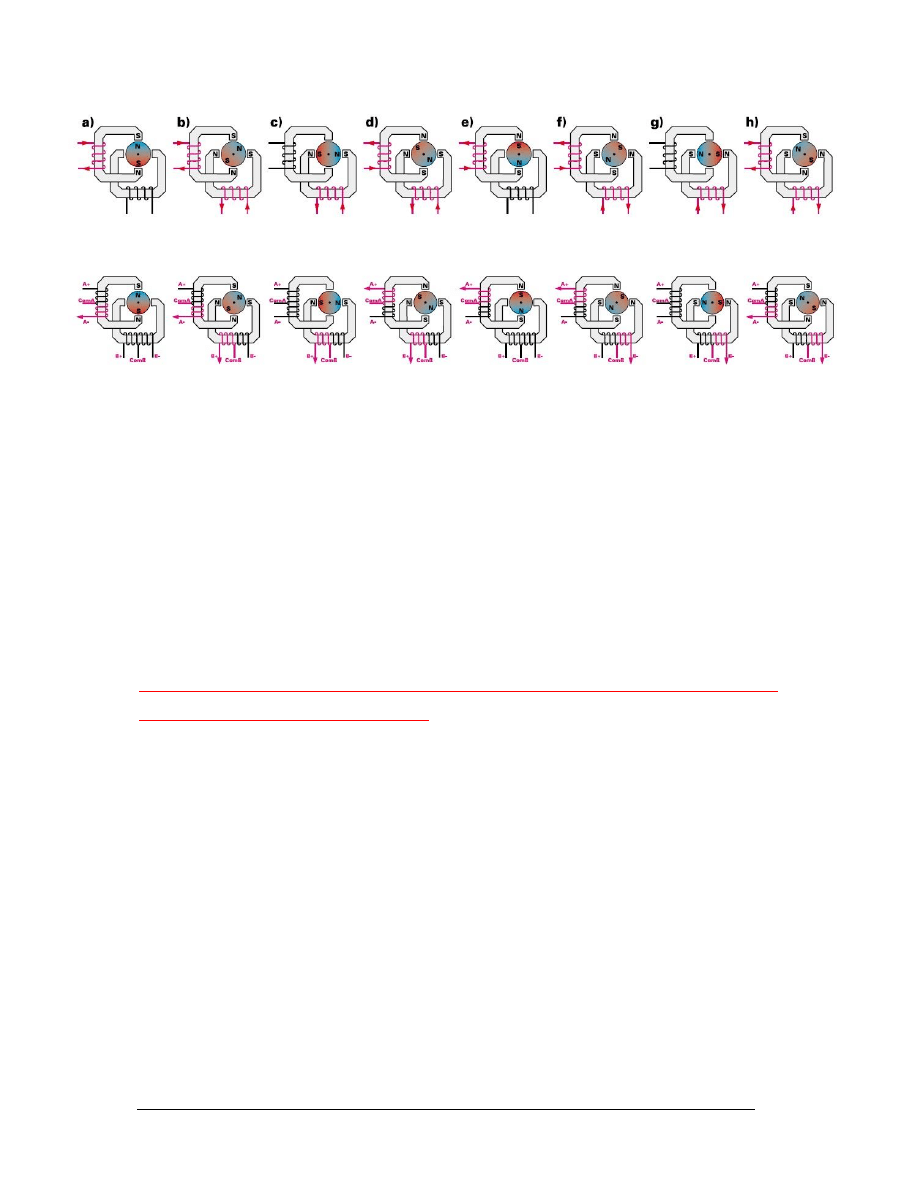
Połączenie sterowania falowego i pełnokrokowego powoduje, że zęby wirnika
zatrzymują się albo naprzeciwko biegunów stojana, albo pomiędzy nimi. Takie
sterowanie nazywamy półkrokowym (rys. 7). Naprzemiennie zasilane są jedno lub
dwa uzwojenia. Powoduje to, że moment obrotowy co drugiego kroku jest mniejszy o
połowę. Niektóre zastosowania dopuszczają takie rozwiązanie ze względu na poprawę
płynności ruchu zwłaszcza przy małych prędkościach obrotowych.
Rys. 6 Schemat zasilania cewek silników uni i bipolarnych przy sterowaniu pełnokrokowym [3].
Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
5
Rys. 7. Schemat zasilania cewek silników uni i bipolarnych przy sterowaniu półkrokowym [3].
Sterowanie
mikrokrokowe
pozwala wielokrotnie
zwiększyć rozdzielczość
pozycjonowania wału silnika. Można to osiągnąć poprzez odpowiednie (wielostopniowe)
zmienianie natężeń prądów w uzwojeniach A i B. Możliwe jest wtedy uzyskanie dowolnej
liczby pośrednich położeń wirnika pomiędzy pozycjami pełnokrokowymi jednakże wiąże się
to ze znaczną komplikacją układu sterującego (sterownika). Moment obrotowy silnika jest w
tym przypadku zależny od sumy prądów uzwojeń A i B, będzie więc minimalnie różny dla
poszczególnych mikrokroków.
UWAGA! Należy zapoznać się z instrukcjami obsługi następujących urządzeń (w
oryginalnych plikach PDF producenta):
generatora impulsów GEN-01 (plik: Instrukcja R4_Zał1 Generator GEN-01.pdf ),
sterownika SKK-B05 (plik: Instrukcja R4_Zał2 Sterownik SKK-B05.pdf ),
sterownika SKK-B03 (plik: Instrukcja R4_Zał3 Sterownik SKK-B03.pdf ).
Źródła
[1] Rodzaje silników krokowych i ich właściwości. http://automatykaonline.pl/rodzaje-silnikow-
krokowych-i-ich-wlasciwosci/, styczeń 2013
[2] Potocki L.:Silniki krokowe od podstaw. Elektronika dla wszystkich. Sierpień 2002
[3] Potocki L. :Silniki krokowe od podstaw. Elektronika dla wszystkich. Wrzesień 2002
Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
6
Przebieg ćwiczenia
I. Zbudowanie i uruchomienie napędu z silnikiem krokowym
I.1. Zidentyfikuj elementy stanowiska ćwiczeniowego:
- silnik krokowy
- generator sygnału prostokątnego GEN-01
- sterownik silnika krokowego SKK-B05
- zasilacz prądu stałego 24VDC (dla sterownika SKK-B05)
- zasilacz prądu stałego 5VDC (dla generatora GEN-01)
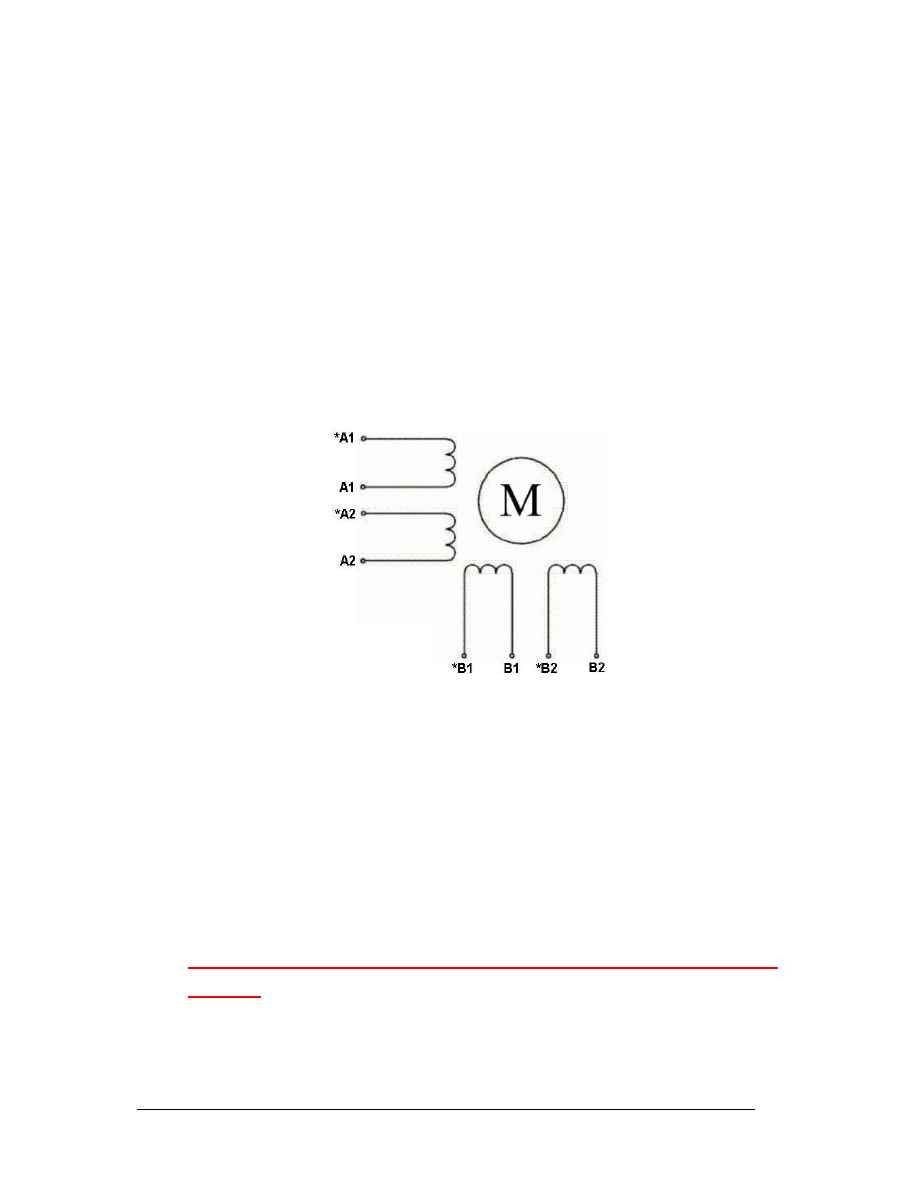
I.2. Używając omomierza zidentyfikuj 4 pary przewodów - wyprowadzenia czterech
cewek uzwojeń stojana silnika (silnik z ośmioma wyprowadzeniami):
Rys. 8. Schemat elektryczny uzwojeń silnika krokowego.
I.3. Wykonaj prawidłowo połączenia elektryczne:
-
uzwojeń silnika ze sterownikiem SKK-B05 – użyj tylko „połowy” uzwojeń silnika
(czyli ½ uzwojenia fazy A oraz ½ uzwojenia fazy B);
-
generatora GEN-01 ze sterownikiem SKK-B05 – generator ma zadawać sygnał
kroku (CLK);
-
ręczny przełącznik kołyskowy wykorzystaj do zadawania (zmiany) kierunku
obrotów silnika (sygnał DIR);
UWAGA! Wszelkie połączenia elektryczne wykonuj z wyłączonym zasilaniem
urządzeń!
I.5. Poproś prowadzącego laboratorium o zweryfikowanie poprawności połączeń.

Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
7
I.6. Ustaw algorytm sterowania silnika na „sterowanie pełnokrokowe” (mikroprzełączniki
SW1 i SW2 na płytce sterownika SKK-B05).
I.7. Oblicz częstotliwość f
1
sygnału CLK jaki należy doprowadzić do sterownika silnika
SKK-B05 aby uzyskać prędkość wirowania silnika n
1
=720obr/min. Wskazówka: dla
sterowania pełnokrokowego wał silnika wykona pełny obrót w ciągu 200 taktów sygnału
CLK.
I.8. Dobierz współczynnik podziału maksymalnej wartości częstotliwości bazowej
generatora GEN-01 (f
0
=150kHz) aby uzyskać na jego wyjściu częstotliwość z zakresu
0Hz f
1
(nastawianą potencjometrem). Przestaw zworkę na właściwe kołki oznaczone
PODZIAŁ na płytce generatora.
I.9. Obracaj wałem niezasilanego silnika krokowego. Dla silnika hybrydowego (z
namagnesowanym trwale wirnikiem) powinien być wyczuwalny delikatny moment
zaczepowy (w pozycjach odległych od siebie o 1/200 pełnego kąta).
I.10. Nastaw gałkę potencjometru generatora GEN-01 na 0Hz (przekręć „w lewo” do
oporu). Włącz zasilanie generatora oraz sterownika. Sprawdź, czy wał silnika daje się
obrócić dłonią (drugą ręką trzymaj mocno korpus silnika). Jeżeli moment potrzebny do
obrócenia wału (tj. do pokonania tzw. momentu trzymającego silnika – dla f
CLK
=0Hz) jest
zbliżony do momentu zaczepowego oznacza to, że układ NIE PRACUJE prawidłowo –
zweryfikuj poprawność oraz kompletność połączeń.
I.11. Obracając powoli potencjometr generatora w prawo zwiększaj częstotliwość sygnału
CLK. Obserwuj wał silnika – prędkość wirowania powinna zmieniać się płynnie i
proporcjonalnie do częstotliwości sygnału z generatora (CLK).
I.12. Sprawdź jakiego momentu siły (oporowego) trzeba użyć aby unieruchomić wał
(hamuj wał dłonią). Powtórz próbę hamowania dla różnych prędkości obrotowych. Czy
zauważyłeś/aś prawidłowość wiążącą wartość momentu napędowego silnika z prędkością
wirowania wału? – Zanotuj wnioski.
UWAGA! Jeżeli w wyniku hamowania wału silnika zmienia on samoistnie kierunek
wirowania lub wpada w oscylacje oznacza to, że prawdopodobnie do sterownika nie
zostały podłączone właściwe uzwojenia silnika, tzn. podłączono dwie połówki uzwojeń
tej samej fazy (A albo B) zamiast uzwojeń dwóch różnych faz (A oraz B). Zmodyfikuj
połączenia i wykonaj ponownie próby hamowania.

Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
8
I.13. Przetestuj zmianę kierunku wirowania wału silnika używając przełącznika
kołyskowego (sygnał DIR). Powtórz próbę dla różnych prędkości wirowania. Obserwuj
zachowanie silnika i zanotuj spostrzeżenia.
I.14. Przestawiaj mikroprzełączniki SW1 i SW2 na płytce sterownika wybierając tzw.
sterowanie mikrokrokowe (możesz robić to w trakcie pracy sterownika). Możesz zmieniać
także współczynnik podziału częstotliwości bazowej generatora – tak aby przetestować
napęd w pełnym zakresie częstotliwości sygnału CLK i prędkości obrotowej (od ok. 1Hz
aż do utraty synchronizacji nieobciążonego wału).
I.15. Zmień polaryzację uzwojenia jednej z faz silnika (zamień przewody jednej fazy
miejscami w zaciskach sterownika). Jak ta zmiana wpłynęła na pracę napędu? Zanotuj
wnioski.
I.16. Zmień polaryzację uzwojenia drugiej fazy silnika. Jak ta zmiana wpłynęła na pracę
napędu? Zanotuj wnioski.
I.17. Zamień sposób podłączenia do sterownika obu faz miejscami (nie zmieniając
polaryzacji). Jak zamiana wpłynęła na pracę napędu? Zanotuj wnioski.
II.
Wyznaczenie charakterystyki momentu napędowego silnika krokowego w
funkcji prędkości obrotowej M(n)
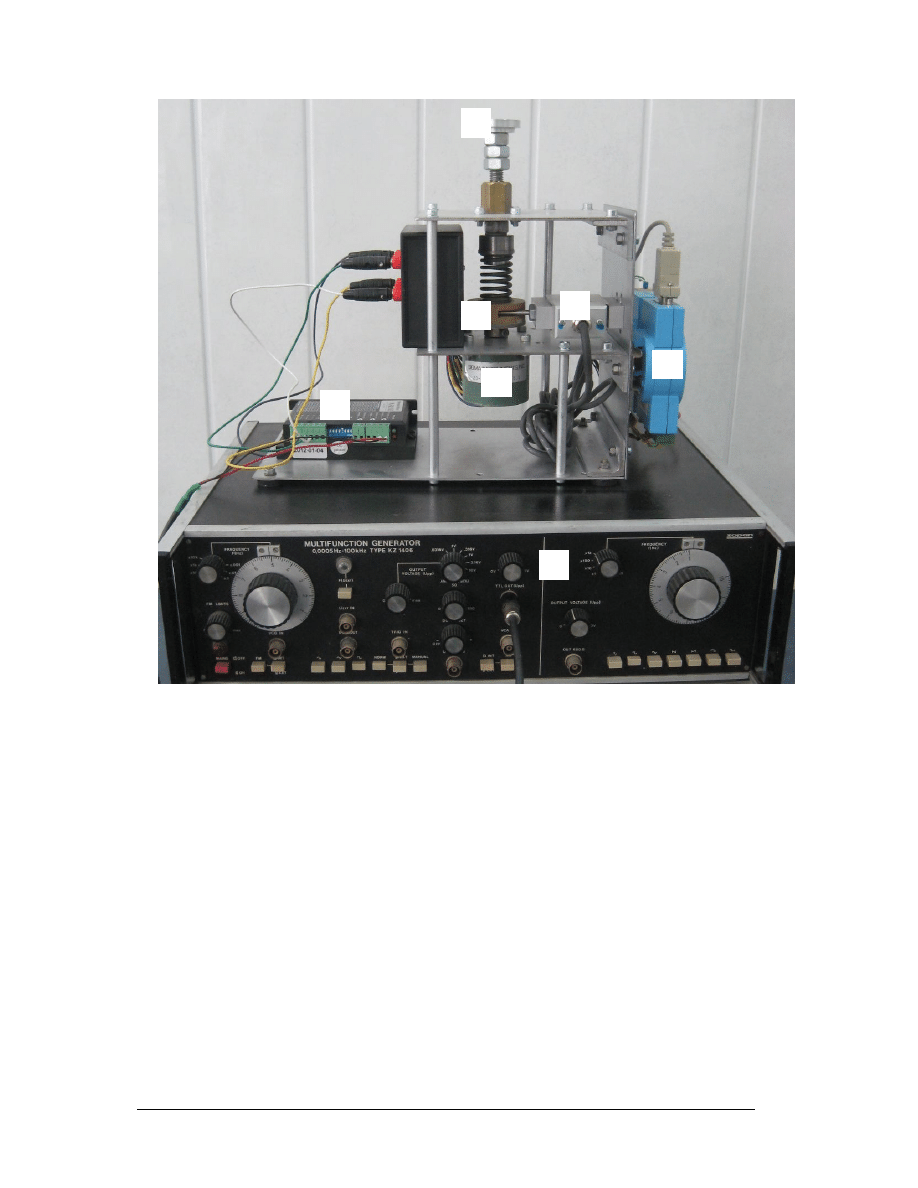
II.1. Zidentyfikuj elementy stanowiska do wyznaczania charakterystyki momentowej
silnika krokowego (rys. 9.):
- silnik krokowy (1),
- sterownik silnika krokowego SKK-B03 (2),
- uniwersalny generator sygnałów okresowych (3),
- hamulec tarczowy (4),
- tensometryczny przetwornik siły (momentu hamującego) (5),
- moduł przetwornika analogowo cyfrowego ADAM-4011D (6).
Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
9
Rys. 9. Widok stanowiska do sporządzania charakterystyk momentowych silnika
krokowego.
II.2.
Uruchom
aplikację
komputerową
do
rejestracji
wyników
badań
–
„Pulpit/LAB_silnik_krokowy”.
II.3. Za pomocą mikroprzełączników sterownika SKK-B03 wybierz algorytm sterowania
półkrokowego (400impulsów/obrót).
II.4. Zwolnij hamulec przez wykręcenie do oporu śruby ściskającej (7) tarcze hamulca.
II.5. Nastaw częstotliwość wyjściową generatora (sygnału CLK) na 50Hz.
II.6. Włącz zasilanie generatora oraz sterownika silnika.
II.7. Obserwując wynik pomiaru momentu hamującego na ekranie komputera powoli
zwiększaj nacisk tarcz hamulca (wkręcaj śrubę hamulca). W chwili zrównania się wartości
6
1
5
4
3
2
7

Instrukcja ćwiczeniowa do stanowiska dydaktycznego w Laboratorium Podstaw Robotyki Katedry Automatyzacji PL
Opracowali: inż. Mikołaj Styła, dr Paweł Stączek (wer.21.02.15)
10
momentu hamującego z momentem napędowym silnika zastanie zerwana synchronizacja
silnika a jego wał wpadnie w drgania. Zanotuj wartość momentu hamującego, dla którego
silnik utracił synchronizację.
II.8. Powtórz pomiar dwukrotnie, za każdym razem uprzednio zwalniając hamulec. Oblicz
wartość średnią momentu napędowego silnika.
II.9. Powtórz pomiary momentu napędowego silnika dla sygnału CLK o częstotliwościach:
250Hz, 500Hz, 1kHz, 2kHz, 3kHz, 4kHz, 5kHz, 6kHz (trzy pomiary dla każdej
częstotliwości).
II.10. Wykreśl wyznaczoną charakterystykę momentu napędowego silnika w funkcji
prędkości obrotowej M(n) (dla wartości średnich momentu).
Pytania kontrolne
1. Omów różnice pomiędzy silnikami krokowymi o zmiennej reluktancji a z
magnesami trwałymi.
2. Podaj ogólną (opisz jakościowo) zależność prędkości obrotowej silników
krokowych od częstotliwości impulsów sterujących.
3. Opisz różnice pomiędzy sterowaniem falowym a pełnokrokowym.
4. Opisz zasadę sterowania półkrokowego i mikrokrokowego silników krokowych.
5. Narysuj i opisz schemat połączenia równoległego i szeregowego bipolarnego
silnika krokowego z 8 wyprowadzeniami do sterownika. Jakie różnice w osiągach
silnika powoduje takie podłączenie silnika?
6. Omów różnice pomiędzy silnikami uni i bipolarnymi.
7. Podaj przykładowe zastosowania silników krokowych.
Wyszukiwarka
Podobne podstrony:
Instrukcja R4 Silnik krokowy
Opis silnikow krokowych id 3370 Nieznany
Kontroler silnika krokowego na porcie LPT3
Kontroler silnika krokowego na porcie LPT2
3 Silnik krokowy
Instrukcja doboru silnika
Instrukcja R4 Zał2 Sterownik SSK B05
badanie silnika krokowego, mechanika, BIEM- POMOCE, automatyka i sterowanie
Kontroler silnika krokowego na porcie LPT6
silniki krokowe
Katalog silników krokowych Minebea
[Instrukcja obsługi] Silniki spalinowe Honda GX610, GX620, GX670
SILNIKI KROKOWE
Astra F Silnik krokowy w X16SZR
Najprostszy sterownik silników krokowych, ELEKTRONIKA
4 emulacja, silnik krokowy
więcej podobnych podstron