1
Opracował:
Piotr Zboralski
Grupa:
KBI 2
Semestr:
VII
Trzcianka 19.X.2007 r.
2
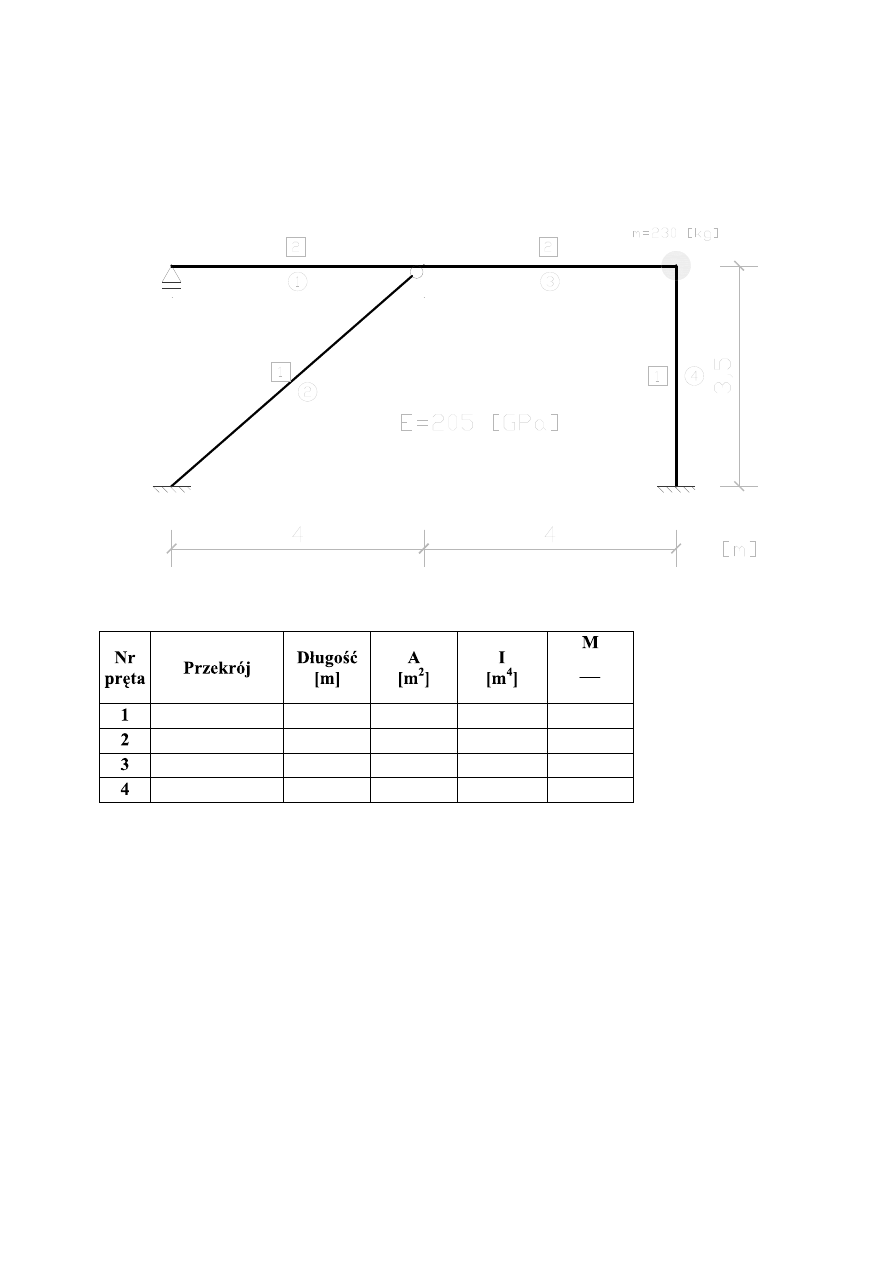
Dla układu ramowego o zadanych przekrojach prętów obliczyć częstości drgań własnych i
narysować trzy pierwsze postacie drgań.
Zadany układ:
Charakterystyki prętów:
m
kg
I 200
4
0,00334
8
10
2140
−
⋅
26.3
I 220
≈5.315
0.00395
8
10
3060
−
⋅
31.09
I 200
4
0,00334
8
10
2140
−
⋅
26.3
I 220
3,5
0.00395
8
10
3060
−
⋅
31.09
Wyznaczenie wartości częstości drgań własnych w ujęciu komputerowym sprowadza się do
rozwiązania ogólnego równania ruchu układu:
[ ] [ ] [ ]
[ ]
[ ]
P
q
M
q
C
q
K
=
⋅
+
⋅
+
⋅
..
.
Po wyeliminowaniu z tego równania działania sił wymuszających i tłumienia, otrzymujemy
równanie drgań własnych nietłumionych:
[ ] [ ] [ ]
[ ]
0
..
=
⋅
+
⋅
q
M
q
K
,
gdzie:
t
q
q
t
q
q
ω
ω
sin
sin
0
..
0
⋅
−
=
⋅
=
,
zatem ostatecznie:
[ ]
(
)
[ ] [ ]
0
]
[
0
=
⋅
⋅
−
q
M
K
λ
3
W projekcie każdy z prętów stanowi pojedynczy element, a przemieszczenia oprócz punktów
węzłowych zostaną obliczone dodatkowo w punktach wynikających z podziału każdego pręta na 5
części, co pozwoli na dokładniejsze zobrazowanie postaci drgań własnych.
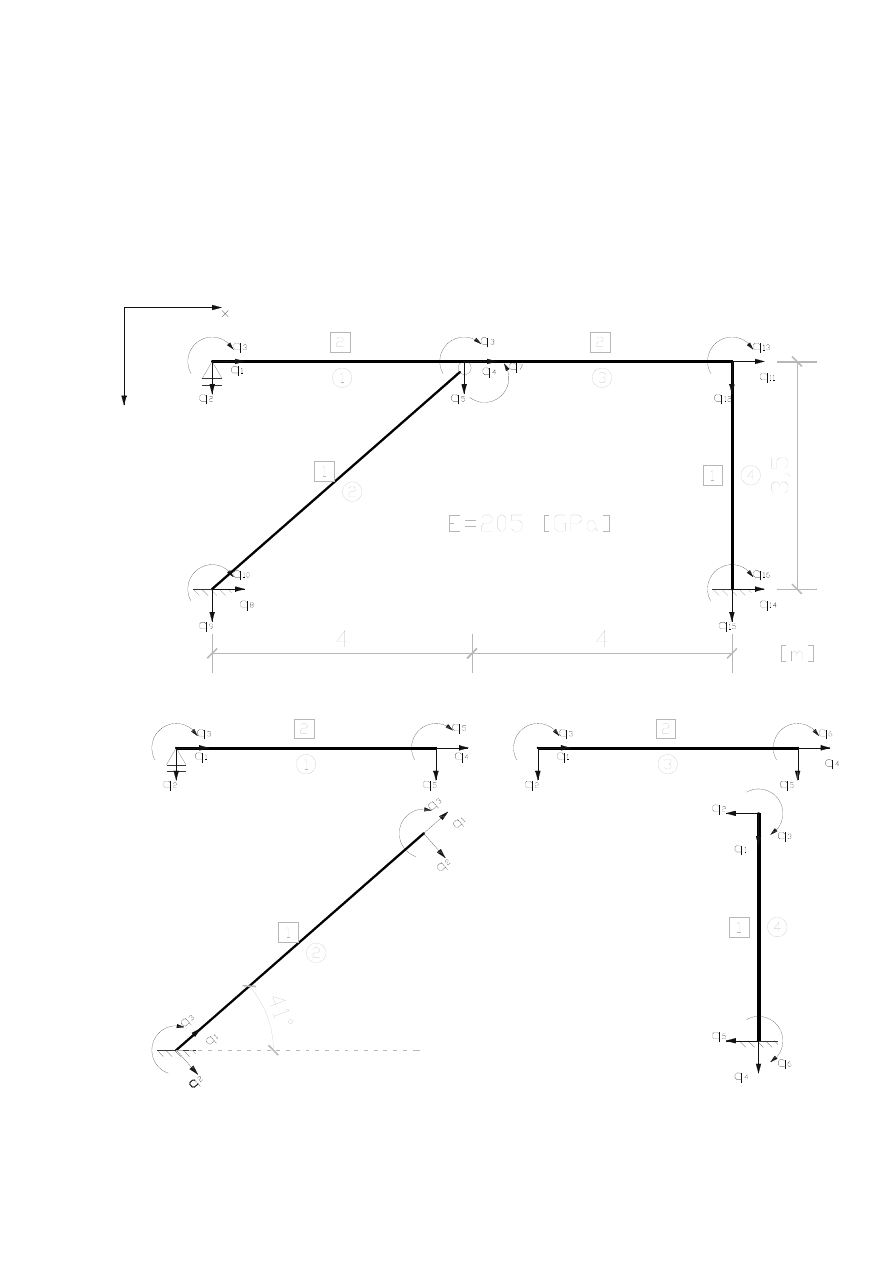
Przyjęcie układu globalnego, układów lokalnych dla poszczególnych prętów oraz numeracja
przemieszczeń węzłowych.
a) układ globalny
b) układy lokalne poszczególnych prętów:
Z tak przyjętych układów lokalnych wynika, że transformację macierzy sztywności i mas z układu
lokalnego do globalnego będziemy przeprowadzać dla pręta 2 i 4, odpowiednio o kąty ( 360 – 41 )
o
oraz 90
o
.
Dla prętów 1 i 3 układy lokalne pokrywają się z układem globalnym. W tak przyjętych układach
współrzędnych, pręt 1 to pręt z przegubem na lewym końcu, pręt nr 2 to pręt z przegubem na prawym
4
końcu pozostałe pręty zaś są obustronnie utwierdzone. Przy obliczaniu macierzy sztywności i mas dokonam
redukcji statycznej.
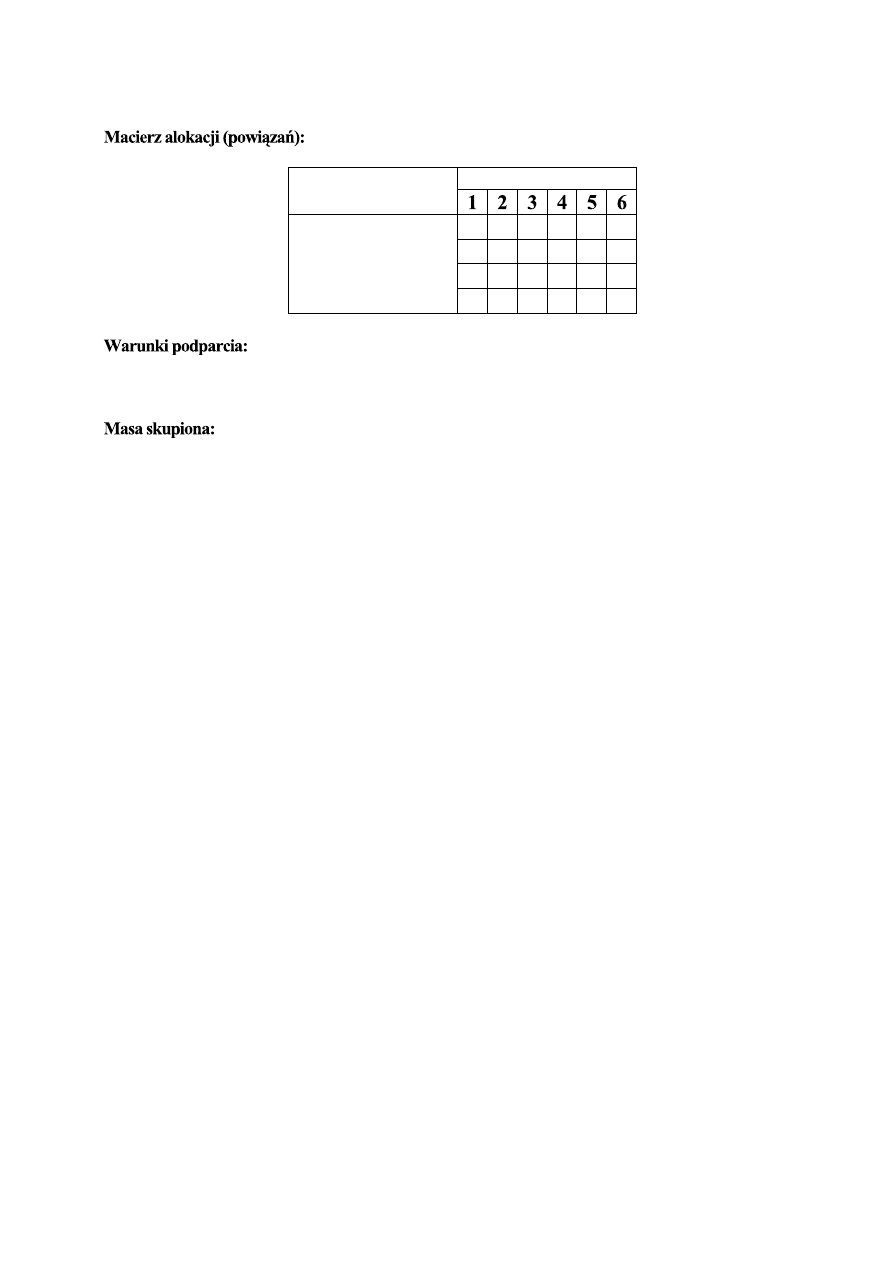
W układzie lokalnym
Numer przemieszczenia
1 2 3 4 5 6
8 9 10 4 5 7
4 5 6 11 12 13
W
u
k
ła
d
zi
e
g
lo
b
a
ln
ym
11 12 13 14 15 16
Zerowe przemieszczenia: q
2
, q
8
, q
9
, q
10
, q
14
, q
15
, q
16
Redukcja kątów obrotu: q
3
, q
7
Efekt dodatkowych sił bezwładności należy uwzględnić przez dodanie do elementów:
(
)
11
,
11
M
oraz
(
)
12
,
12
M
w macierzy mas wartości masy m=230[kg]
2. Utworzenie macierzy sztywności prętów:
Wzory ogólne zamieszczone są na karcie projektowej.
a) pręt nr 1: pręt z przegubem na lewym końcu:
Macierz sztywności w układzie lokalnym:
=
3290250
822562.5
-
0.
0.
822562.5
0.
822562.5
-
205640.63
0.
0.
205640.63
-
0.
0.
0.
08
+
1.712D
0.
0.
08
+
1.712D
-
0.
0.
0.
0.
0.
0.
822562.5
205640.63
-
0.
0.
205640.63
0.
0.
0.
08
+
1.712D
-
0.
0.
08
+
1.712D
1
LOK
K
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
0
=
α
Macierz transformacji:
=
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=

5
=
3290250.
822562.5
-
0.
0.
822562.5
0.
822562.5
-
205640.63
0.
0.
205640.63
-
0.
0.
0.
08
+
1.712D
0.
0.
08
+
1.712D
-
0.
0.
0.
0.
0.
0.
822562.5
205640.63
-
0.
0.
205640.63
0.
0.
0.
08
+
1.712D
-
0.
0.
08
+
1.712D
1
GLOB
K
b) pręt nr 2: pręt z przegubem na prawym końcu:
Macierz sztywności w układzie lokalnym:
+
=
0.
0.
0.
0.
0.
0.
0.
125333.99
0.
666159.29
-
125333.99
-
0.
0.
0.
08
1.523D
0.
0.
08
+
1.523D
-
0.
666159.29
-
0.
3540685.2
666159.29
0.
0.
125333.99
-
0.
666159.29
125333.99
0.
0.
0.
08
+
1.523D
-
0.
0.
08
+
1.523D
2
LOK
K
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
319
≅
α
Macierz transformacji:
−
−
=
.
0
.
0
.
0
.
0
.
0
.
0
.
0
752767
.
0
6585046
.
0
.
0
.
0
.
0
.
0
6585046
.
0
7525767
.
0
.
0
.
0
.
0
.
0
.
0
.
0
.
1
.
0
.
0
.
0
.
0
.
0
.
0
752767
.
0
6585046
.
0
.
0
.
0
.
0
.
0
6585046
.
0
7525767
.
0
2
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=
=
0.
0.
0.
0.
0.
0.
0.
66134149.
75438646.
-
501335.96
-
66134149.
-
75438646.
0.
75438646.
-
86340929.
438668.96
-
75438646.
86340929.
-
0.
501335.96
-
438668.96
-
3540685.2
501335.96
438668.96
0.
66134149.
-
75438646.
501335.96
66134149.
75438646.
-
0.
75438646.
86340929.
-
438668.96
75438646.
-
86340929.
2
GLOB
K
c) pręt nr 3: pręt obustronnie utwierdzony:
Macierz sztywności w układzie lokalnym:

6
=
4387000.
1645125.
-
0.
2193500.
1645125.
0.
1645125.
-
822562.5
0.
1645125.
-
822562.5
-
0.
0.
0.
08
+
1.712D
0.
0.
08
+
1.712D
-
2193500.
1645125.
-
0.
4387000.
1645125.
0.
1645125.
822562.5
-
0.
1645125.
822562.5
0.
0.
0.
08
+
1.712D
-
0.
0.
08
+
1.712D
3
LOK
K
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
0
≅
α
Macierz transformacji:
=
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
3
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=
=
4387000.
1645125.
-
0.
2193500.
1645125.
0.
1645125.
-
822562.5
0.
1645125.
-
822562.5
-
0.
0.
0.
08
+
1.712D
0.
0.
08
+
1.712D
-
2193500.
1645125.
-
0.
4387000.
1645125.
0.
1645125.
822562.5
-
0.
1645125.
822562.5
0.
0.
0.
08
+
1.712D
-
0.
0.
08
+
1.712D
3
GLOB
K
d) pręt nr 4: pręt obustronnie utwierdzony:
Macierz sztywności w układzie lokalnym:
=
7169142.9
3072489.8
-
0.
3584571.4
3072489.8
0.
3072489.8
-
1755708.5
0.
3072489.8
-
1755708.5
-
0.
0.
0.
08
+
2.314D
0.
0.
08
+
2.314D
-
3584571.4
3072489.8
-
0.
7169142.9
3072489.8
0.
3072489.8
1755708.5
-
0.
3072489.8
1755708.5
0.
0.
0.
08
+
2.314D
-
0.
0.
08
+
2.314D
3
LOK
K
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
90
≅
α

7
Macierz transformacji:
−
−
=
1
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
1
0
3
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=
=
7169142.9
10
-
1.881D
-
3072489.8
3584571.4
10
-
1.881D
3072489.8
-
10
-
1.881D
-
08
+
2.314D
08
-
1.406D
10
-
1.881D
-
08
+
2.314D
-
08
-
1.406D
-
3072489.8
08
-
1.406D
1755708.5
3072489.8
08
-
1.406D
-
1755708.5
-
3584571.4
10
-
1.881D
-
3072489.8
7169142.9
10
-
1.881D
3072489.8
-
10
-
1.881D
08
+
2.314D
-
08
-
1.406D
-
10
-
1.881D
08
+
2.314D
08
-
1.406D
3072489.8
-
08
-
1.406D
-
1755708.5
-
3072489.8
-
08
-
1.406D
1755708.5
3
GLOB
K
Macierz sztywności po agregacji zgodnie z tabelą alokacji:
Agregację macierzy sztywności wykonałem zgodnie z tabelą alokacji (powiązań)
3. Utworzenie macierzy mas prętów:
Wzory ogólne zamieszczone są na karcie projektowej.
a) pręt nr 1: pręt z przegubem na lewym końcu:
Macierz mas w układzie lokalnym:
=
32.060952
36.068571
-
0.
0.
16.531429
-
0.
36.068571
-
51.097143
0.
0.
14.652857
0.
0.
0.
35.066667
0.
0.
17.533333
0.
0.
0.
0.
0.
0.
16.531429
-
14.652857
0.
0.
24.797143
0.
0.
0.
17.533333
0.
0.
35.066667
1
LOK
M
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
0
=
α
Macierz transformacji:

8
=
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=
=
32.060952
36.068571
-
0.
0.
16.531429
-
0.
36.068571
-
51.097143
0.
0.
14.652857
0.
0.
0.
35.066667
0.
0.
17.533333
0.
0.
0.
0.
0.
0.
16.531429
-
14.652857
0.
0.
24.797143
0.
0.
0.
17.533333
0.
0.
35.066667
1
GLOB
M
b) pręt nr 2: pręt z przegubem na prawym końcu:
Macierz sztywności w układzie lokalnym:
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
319
≅
α
=
0.
0.
0.
0.
0.
0.
0.
38.950752
0.
34.504348
23.016354
0.
0.
0.
55.081872
0.
0.
27.540936
0.
34.504348
0.
88.917879
75.282214
0.
0.
23.016354
0.
75.282214
80.262157
0.
0.
0.
27.540936
0.
0.
55.081872
2
LOK
M
Macierz transformacji:
−
−
=
.
0
.
0
.
0
.
0
.
0
.
0
.
0
752767
.
0
6585046
.
0
.
0
.
0
.
0
.
0
6585046
.
0
7525767
.
0
.
0
.
0
.
0
.
0
.
0
.
0
.
1
.
0
.
0
.
0
.
0
.
0
.
0
752767
.
0
6585046
.
0
.
0
.
0
.
0
.
0
6585046
.
0
7525767
.
0
2
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=

9
=
0.
0.
0.
0.
0.
0.
0.
45.945663
7.9941832
-
25.967168
24.978341
2.2422709
-
0.
7.9941832
-
48.086962
22.721272
2.2422709
-
25.578949
0.
25.967168
22.721272
88.917879
56.65564
49.573685
0.
24.978341
2.2422709
-
56.65564
69.343272
12.478725
0.
2.2422709
-
25.578949
49.573685
12.478725
66.000757
2
GLOB
M
c) pręt nr 3: pręt obustronnie utwierdzony:
Macierz sztywności w układzie lokalnym:
=
16.030476
22.041905
-
0.
12.022857
-
13.024762
-
0.
22.041905
-
39.074286
0.
13.024762
13.525714
0.
0.
0.
35.066667
0.
0.
17.533333
12.022857
-
13.024762
0.
16.030476
22.041905
0.
13.024762
-
13.525714
0.
22.041905
39.074286
0.
0.
0.
17.533333
0.
0.
35.066667
3
LOK
M
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
0
≅
α
Macierz transformacji:
=
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
0.
0.
0.
0.
0.
0.
1.
3
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=
=
16.030476
22.041905
-
0.
12.022857
-
13.024762
-
0.
22.041905
-
39.074286
0.
13.024762
13.525714
0.
0.
0.
35.066667
0.
0.
17.533333
12.022857
-
13.024762
0.
16.030476
22.041905
0.
13.024762
-
13.525714
0.
22.041905
39.074286
0.
0.
0.
17.533333
0.
0.
35.066667
3
GLOB
M
d) pręt nr 4: pręt obustronnie utwierdzony:
Macierz sztywności w układzie lokalnym:

10
=
12.695083
19.949417
-
0.
9.5213125
-
11.788292
-
0.
19.949417
-
40.417
0.
11.788292
13.9905
0.
0.
0.
36.271667
0.
0.
18.135833
9.5213125
-
11.788292
0.
12.695083
19.949417
0.
11.788292
-
13.9905
0.
19.949417
40.417
0.
0.
0.
18.135833
0.
0.
36.271667
4
LOK
M
Transformacja do układu globalnego:
Kąt wiążący układ lokalny z globalnym:
o
90
≅
α
Macierz transformacji:
−
−
=
1
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
1
0
0
0
0
1
0
3
T
Macierz sztywności w układzie globalnym (po wykonaniu transformacji):
T
K
T
K
T
⋅
⋅
=
=
12.695083
15
-
1.222D
-
19.949417
9.5213125
-
16
-
7.218D
-
11.788292
15
-
1.222D
-
36.271667
16
-
2.538D
-
16
-
7.218D
18.135833
16
-
2.538D
19.949417
16
-
2.538D
-
40.417
11.788292
-
16
-
2.538D
13.9905
9.5213125
-
16
-
7.218D
11.788292
-
12.695083
15
-
1.222D
19.949417
-
16
-
7.218D
-
18.135833
16
-
2.538D
15
-
1.222D
36.271667
16
-
2.538D
-
11.788292
16
-
2.538D
13.9905
19.949417
-
16
-
2.538D
-
40.417
4
GLOB
M
Agregację macierzy sztywności wykonałem zgodnie z tabelą alokacji (powiązań)
Po wykonaniu agregacji możemy uwzględnić warunki podparcia. Po uwzględnieniu warunków
podparcia z macierzy sztywności oraz mas wykreśliłem wiersze i kolumny odpowiadające
zerowym przemieszczeniom ostatecznie otrzymując macierze o wymiarach [6x6]
Macierz sztywności po uwzględnieniu warunków brzegowych:
K=
[.171200E+09 ,-.171200E+09 , .000000E+00 , .000000E+00 , .000000E+00 , .000000E+00 , .000000E+00 ;
-.171200E+09 , .428700E+09 ,-.754386E+08 , .000000E+00 ,-.171200E+09 , .000000E+00 , .000000E+00 ;
.000000E+00 ,-.754386E+08 , .671624E+08 , .822563E+06 , .000000E+00 ,-.822563E+06 , .164513E+07 ;
.000000E+00 , .000000E+00 , .822563E+06 , .767725E+07 , .000000E+00 ,-.164513E+07 , .219350E+07 ;
.000000E+00 ,-.171200E+09 , .000000E+00 , .000000E+00 , .172900E+09 , .000000E+00 ,-.307249E+07 ;
.000000E+00 , .000000E+00 ,-.822563E+06 ,-.164513E+07 , .000000E+00 , .232200E+09 ,-.164513E+07 ;
.000000E+00 , .000000E+00 , .164513E+07 , .219350E+07 ,-.307249E+07 ,-.164513E+07 , .115561E+08 ; ]
11
Macierz mas po uwzględnieniu warunków brzegowych:
M=
[.350667E+02 , .175333E+02 , .000000E+00 , .000000E+00 , .000000E+00 , .000000E+00 , .000000E+00 ;
.175333E+02 , .118220E+03 ,-.799418E+01 , .000000E+00 , .175333E+02 , .000000E+00 , .000000E+00 ;
.000000E+00 ,-.799418E+01 , .136117E+03 ,-.140267E+02 , .000000E+00 , .135257E+02 ,-.130248E+02 ;
.000000E+00 , .000000E+00 ,-.140267E+02 , .480914E+02 , .000000E+00 , .130248E+02 ,-.120229E+02 ;
.000000E+00 , .175333E+02 , .000000E+00 , .000000E+00 , .305484E+03 , .000000E+00 ,-.199494E+02 ;
.000000E+00 , .000000E+00 , .135257E+02 , .130248E+02 , .000000E+00 , .305346E+03 ,-.220419E+02 ;
.000000E+00 , .000000E+00 ,-.130248E+02 ,-.120229E+02 ,-.199494E+02 ,-.220419E+02 , .287256E+02 ; ]
Podstawiając powyższe macierze do równania
[ ]
[ ]
(
)
[ ] [ ]
0
0
=
⋅
⋅
−
q
M
K
λ
wyznaczam wartości
własne λ oraz wektory własne [q
0
]. Powyższe równanie rozwiązałem używając programu UPW,
otrzymując:
Wartości własne
( λ= )
NR REAL IMAG
1 .432049E+04 .000000E+00
2 .123353E+06 .000000E+00
3 .426570E+06 .000000E+00
4 .704657E+06 .000000E+00
5 .841799E+06 .000000E+00
6 .181021E+07 .000000E+00
7 .978354E+07 .000000E+00
Częstości drgań własnych:
λ
ϖ
=
=
=
=
=
=
=
=
s
rad
3127.8651
s
rad
1345.4404
s
rad
917.49605
s
rad
839.4385
s
rad
653.12327
s
rad
351.21646
s
rad
65.730434
7
6
5
4
3
2
1
ω
ω
ω
ω
ω
ω
ω
Wektory własne:
NR REAL
1 -.100000E+01
2 -.998673E+00
3 -.113020E+01
4 .170884E+00
5 -.999110E+00
6 -.390512E-02
7 -.126878E+00
12
NR REAL
1 .156355E-01
2 .150503E-01
3 .629518E-02
4 .804101E+00
5 .176121E-01
6 .155764E-01
7 -.372249E+00
NR REAL
1 .104593E+00
2 .914591E-01
3 -.414562E+00
4 .392244E+00
5 .256146E+00
6 -.751252E-01
7 .999137E+00
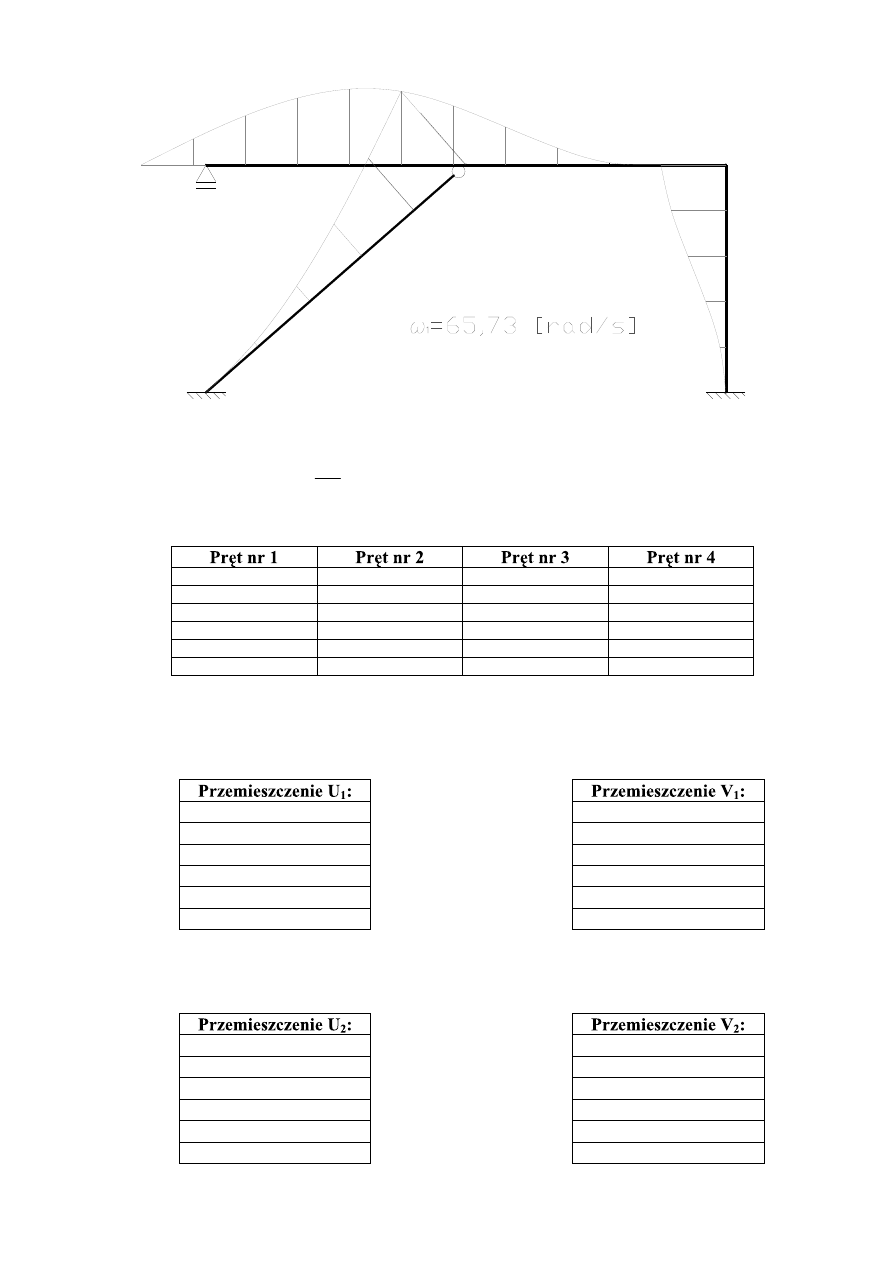
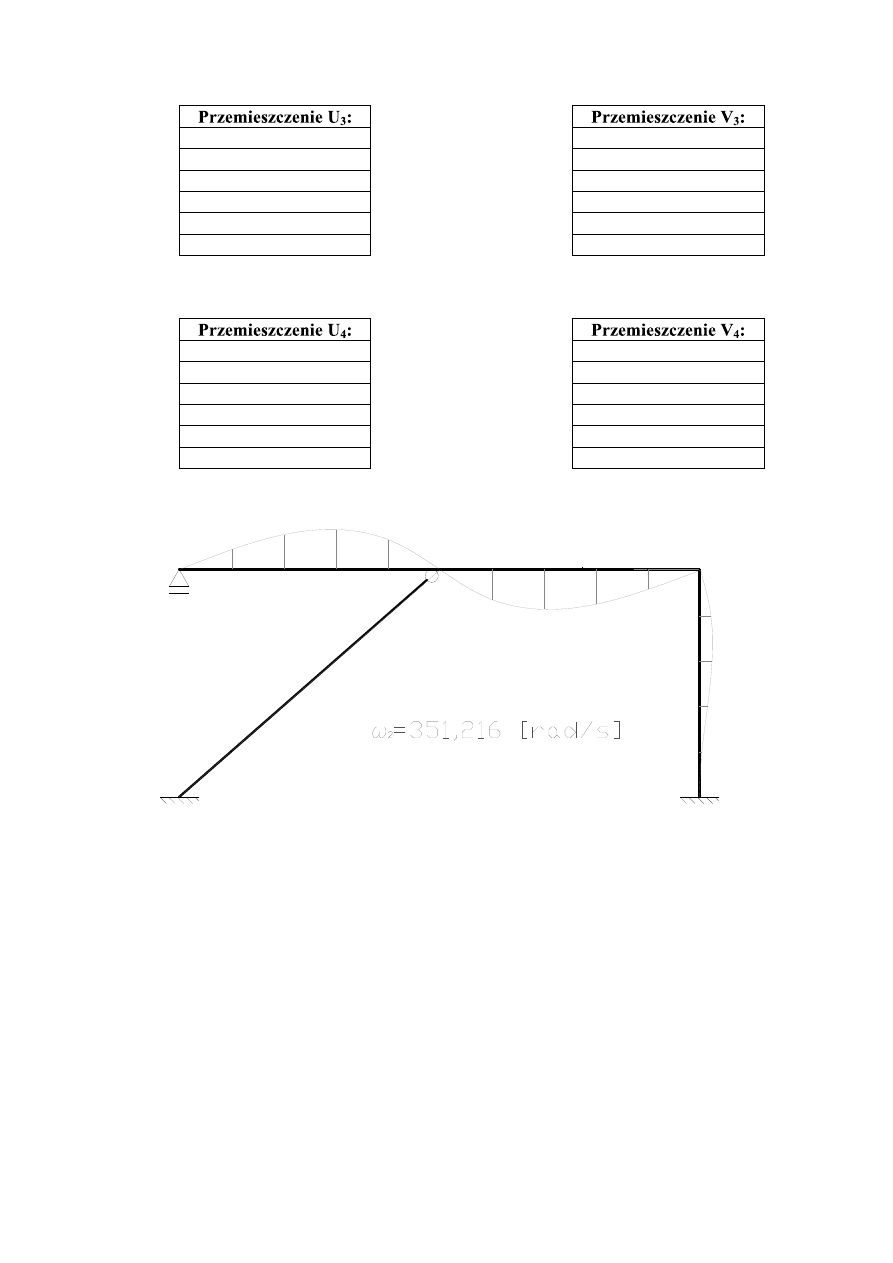
Do dalszych obliczeń przyjmuję 3 pierwsze postacie drgań własnych o częstościach:
=
=
=
s
rad
653.12327
s
rad
351.21646
s
rad
65.730434
3
2
1
ω
ω
ω
Postacie drgań własnych:
W celu narysowania postaci drgań własnych posłużyłem się funkcjami kształtu (zamieszczone na
karcie tematycznej projektu).
Do opisu przemieszczeń na długości pręta posłużyłem się następującymi funkcjami przemieszczeń:
( )
( )
( )
)
(
)
(
)
(
)
(
)
(
6
6
5
5
3
3
2
2
4
4
1
1
x
N
q
x
N
q
x
N
q
x
N
q
x
v
x
N
q
x
N
q
x
u
+
+
+
=
+
=
−
−
a) dla:
=
s
rad
65.730434
1
ω
wektory uogólnionych przemieszczeń węzłowych w układzie
lokalnym:
- 1.
0.
- 0.998673
- 0.0039051
0.
0.
- 1.1302
0.99911
0.
0.
0.170884
- 0.126878
- 0.998673
- 0.0073361
- 0.99911
0.
- 1.1302
- 1.508193
- 0.0039051
0.
0.170884
0.
- 0.126878
0.
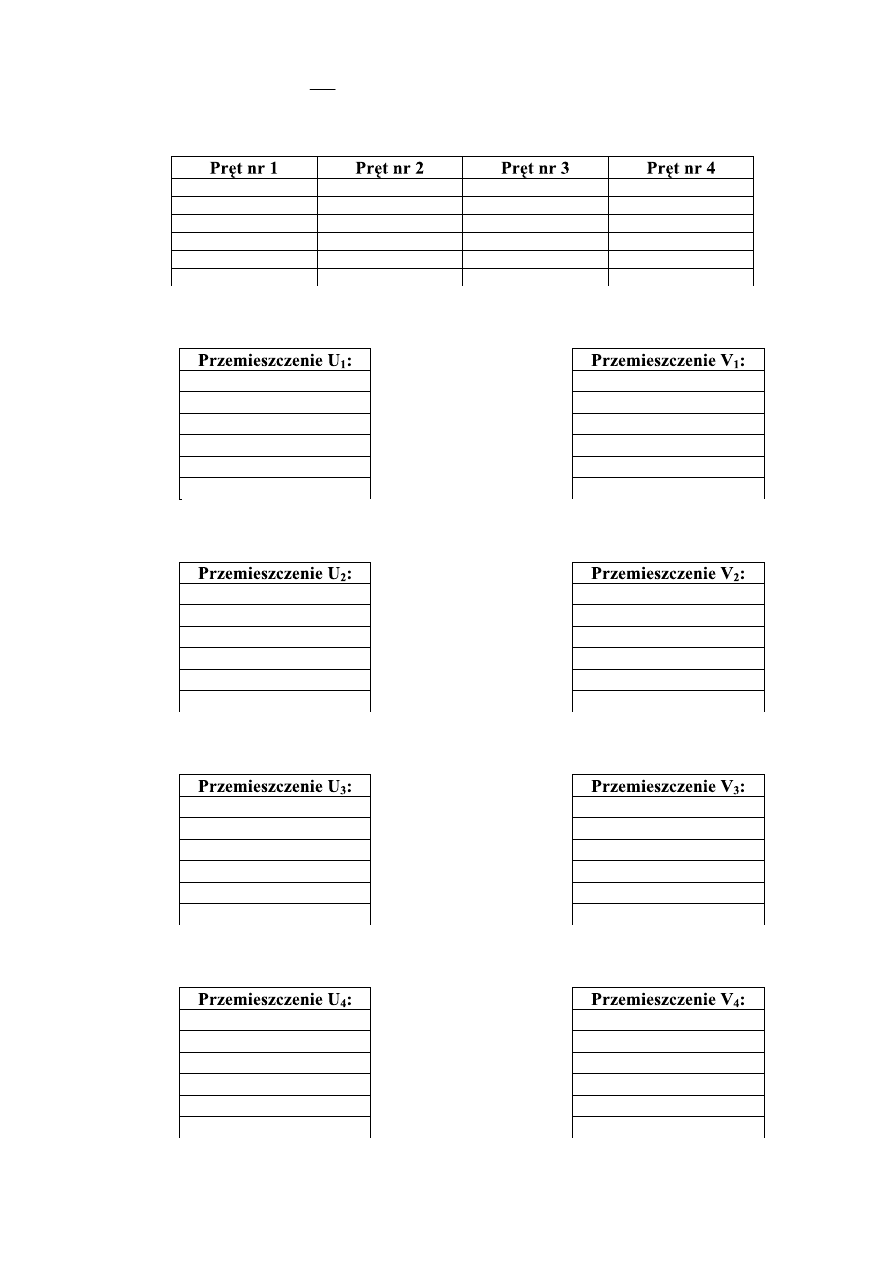
Przemieszczenia w lokalnym układzie współrzędnych dla wybranych punktów są
następujące:
-
pręt nr 1:
13
- 1. [m]
0. [m]
- 0.9997346 [m]
- 0.4001587 [m]
- 0.9994692 [m]
- 0.7567876 [m]
- 0.9992038 [m]
- 1.0263573 [m]
- 0.9989384 [m]
- 1.165338 [m]
- 0.998673 [m]
- 1.1302 [m]
-
pręt nr 2:
0. [m]
0. [m]
- 0.0014672 [m]
- 0.0844588 [m]
- 0.0029344 [m]
- 0.3137041 [m]
- 0.0044017 [m]
- 0.6515394 [m]
- 0.0058689 [m]
- 1.0617678 [m]
- 0.0073361 [m]
- 1.508193 [m]
-
pręt nr 3:
- 0.998673 [m]
- 1.1302 [m]
- 0.9987604 [m]
- 0.9093323 [m]
- 0.9988478 [m]
- 0.5865939 [m]
- 0.9989352 [m]
- 0.2616597 [m]
- 0.9990226 [m]
- 0.0342051 [m]
- 0.99911 [m]
- 0.0039051 [m]
-
pręt nr 4:
- 0.0039051 [m]
0.99911 [m]
- 0.0031241 [m]
0.8383612 [m]
- 0.0023431 [m]
0.5834768 [m]
- 0.0015620 [m]
0.3090557 [m]
- 0.0007810 [m]
0.0896971 [m]
0. [m]
0 [m]
14
b) dla:
=
s
rad
351.21646
2
ω
wektory uogólnionych przemieszczeń węzłowych w układzie
lokalnym:
0.0156355
0.
0.0150503
0.0155764
0.
0.
0.0062952
- 0.0176121
0.
0.
0.804101
- 0.372249
0.0150503
0.0071811
0.0176121
0.
0.0062952
0.0146483
0.0155764
0.
0.804101
0.
- 0.372249
0.
Przemieszczenia w lokalnym układzie współrzędnych dla wybranych punktów są
następujące:
-
pręt nr 1:
0.0156355 [m]
0. [m]
0.0155185 [m]
- 0.3069114 [m]
0.0154014 [m]
- 0.5367802 [m]
0.0152844 [m]
- 0.6125638 [m]
0.0151673 [m]
- 0.4572195 [m]
0.0150503 [m]
0.0062952 [m]
-
pręt nr 2:
0. [m]
0. [m]
0.0014362 [m]
0.0008203 [m]
0.0028724 [m]
0.0030468 [m]
0.0043087 [m]
0.0063281 [m]
0.0057449 [m]
0.0103124 [m]
0.0071811 [m]
0.0146483 [m]
15
-
pręt nr 3:
0.0150503 [m]
0.0062952 [m]
0.0155627 [m]
0.4666080 [m]
0.0160750 [m]
0.6156680 [m]
0.0165874 [m]
0.5354996 [m]
0.0170997 [m]
0.3081276 [m]
0.0176121 [m]
0.0155764 [m]
-
pręt nr 4:
0.0155764 [m]
- 0.0176121 [m]
0.0124611 [m]
- 0.1825480 [m]
0.0093458 [m]
- 0.1990261 [m]
0.0062306 [m]
- 0.1312751 [m]
0.0031153 [m]
- 0.0435235 [m]
0. [m]
0. [m]
16
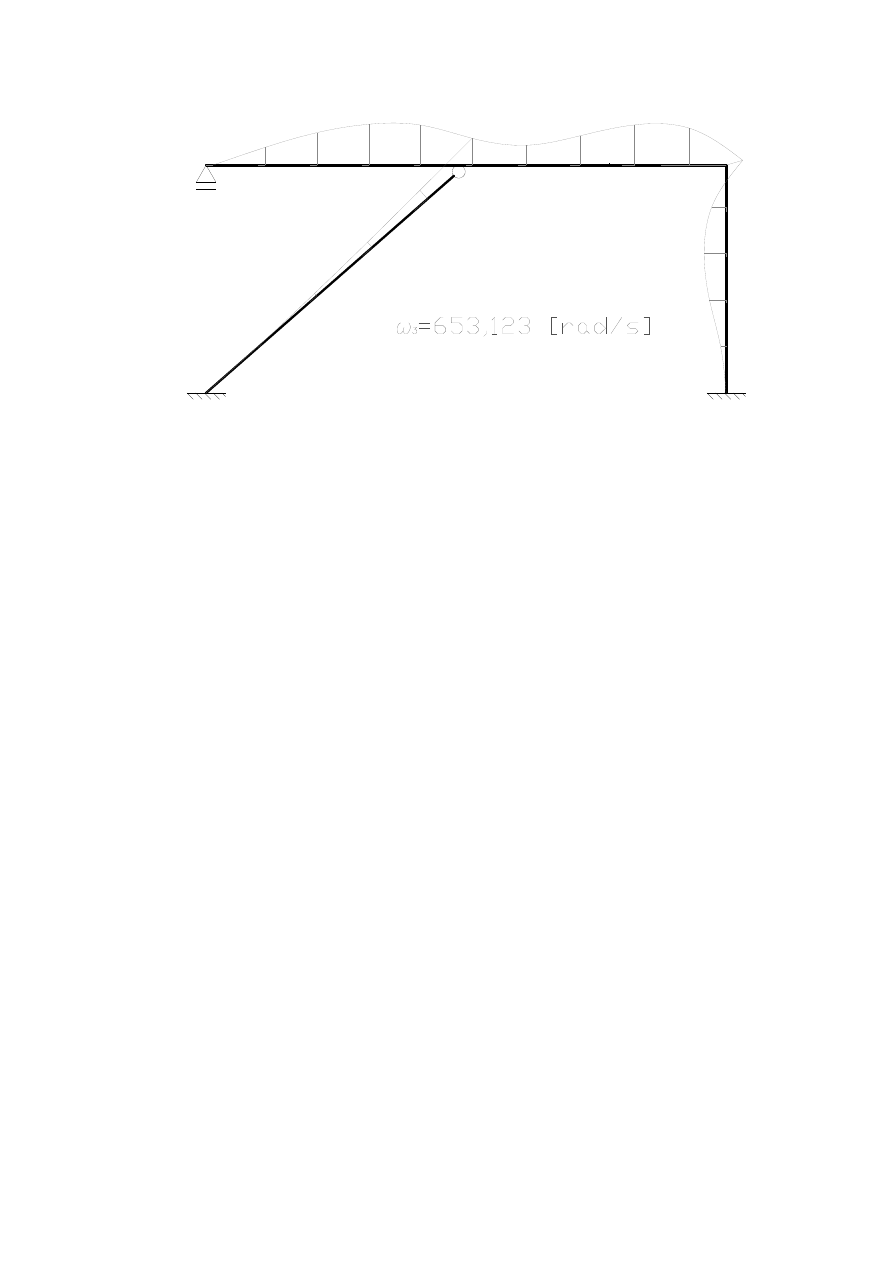
c) dla
=
s
rad
653.12327
3
ω
wektory uogólnionych przemieszczeń węzłowych w układzie
lokalnym:
0.104593
0.
0.0914591
- 0.0751252
0.
0.
- 0.414562
- 0.256146
0.
0.
0.392244
0.999137
0.0914591
0.3418210
0.256146
0.
- 0.414562
- 0.2517635
- 0.0751252
0.
0.392244
0.
0.999137
0.
-
pręt nr 1:
0.104593 [m]
0. [m]
0.1019662 [m]
- 0.2733320 [m]
0.0993394 [m]
- 0.4990592 [m]
0.0967127 [m]
- 0.6295765 [m]
0.0940859 [m]
- 0.6172791 [m]
0.0914591 [m]
- 0.414562 [m]
-
pręt nr 2:
0. [m]
0. [m]
0.0683642 [m]
- 0.0140988 [m]
0.1367284 [m]
- 0.0523668 [m]
0.2050926 [m]
- 0.1087618 [m]
0.2734568 [m]
- 0.1772415 [m]
0.3418210 [m]
- 0.2517635 [m]
-
pręt nr 3:
0.0914591 [m]
- 0.414562 [m]
0.1243965 [m]
- 0.3063212 [m]
0.1573339 [m]
- 0.4528163 [m]
0.1902712 [m]
- 0.6194882 [m]
0.2232086 [m]
- 0.5717775 [m]
0.256146 [m]
- 0.0751252 [m]
-
pręt nr 4:
- 0.0751252 [m]
- 0.256146 [m]
- 0.0601002 [m]
0.2181066 [m]
- 0.0450751 [m]
0.3375824 [m]
- 0.0300501 [m]
0.2455466 [m]
- 0.0150250 [m]
0.0852642 [m]
0. [m]
0. [m]
17
Wyszukiwarka
Podobne podstrony:
proj156 id 397568 Nieznany
proj157 id 397569 Nieznany
proj154 id 397567 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
więcej podobnych podstron