
Opracowanie testu z robotyki
Historia robotyki, roboty humanoidalne
1. Który z poniższych robotów nie jest humanoidalny?
-R2D2
2. Uniwersalne roboty Rossuma były zbudowane z:
-materii podobnej do żywej
3. Pierwsze prawo robotyki sformułowane przez Asimowa stanowi, że:
-robot nie może uszkodzić człowieka czy to poprzez swoje działanie czy
poprzez brak działania w obliczu zagrożenia
4. Zaznacz typowe zastosowania robotów humanoidalnych
-rozrywka
-praca w recepcji, obsługa gości
-badania mechaniki kończyn, badania z dziedziny interakcji ludzi z
maszynami
-praca w środowisku niebezpiecznym (np. zagrożonym wybuchem)
5. Izaak Asimow ogłosił swoje prawa robotyki w roku w dziele zatytułowanym
(Proszę zaznaczyć DATĘ i TYTUŁ)
-1940
-I, Robot
6. Na Wystawie Światowej W Nowym Jorku w roku 1939 prezentowany był
robot humanoidalny, który był wtedy najbardziej zaawansowaną konstrukcją
mechaniczną. Robot był nazwany:
-Electro

7. Słowo „robot” zostało po raz pierwszy użyte:
-w sztuce „Rossum's Universal Robots”
8. Kończyny bioniczne, takie jak bioniczna ręka, są konstrukcjami
mechatronicznymi, które mogą być sterowane:
-sygnałami z systemu nerwowego organizmu, do którego zostały
wszczepione
9. Sztuczny mięsień jest napędzany
-sprężonym powietrzem
10. Które z poniższych robotów poruszają się na dwóch nogach, podobnie jak
ludzie?
-Asimo
-4ao
-HPR-4
Kinematyka
11. Ile stopni swobody ma przegub kulowy?
-3
12. Ile stopni swobody może mieć obiekt, poruszający się na płaszczyźnie
(dwuwymiarowej)?
-3

13. Która z podanych niżej macierzy DH opisuje operację polegającą na
obrocie o 90 w lewo wokół osi Y (patrząc z dodatniej strony osi) z
równoczesnym przesunięciem o 1 wzdłuż tej osi?
0 0 -1 0
0 1 0 1
1 0 0 0
0 0 0 1
14. Która z podanych niżej macierzy DH opisuje operację polegającą na
obrocie o 90 w prawo wokół osi Y (patrząc z dodatniej strony osi) z
równoczesnym przesunięciem o 1 wzdłuż tej osi?
0 0 1 0
0 1 0 1
-1 0 0 0
0 0 0 1
15. Ramię manipulatora szeregowego zbudowane jest z 4 elementów
połączonych 4 przegubami obrotowymi(o jednym stopniu swobody). Do końca
czwartego elementu przyczepiony jest (na stałe) chwytak.
Jaki jest stopień redundancji konstrukcji?
-1
16. Ramię manipulatora szeregowego zbudowane jest z 4 elementów
połączonych 4 przegubami obrotowymi(o jednym stopniu swobody), jak na
rysunku poniżej. Do końca czwartego elementu przyczepiony jest (na stałe)
chwytak. Ile stopni swobody ma chwytak?
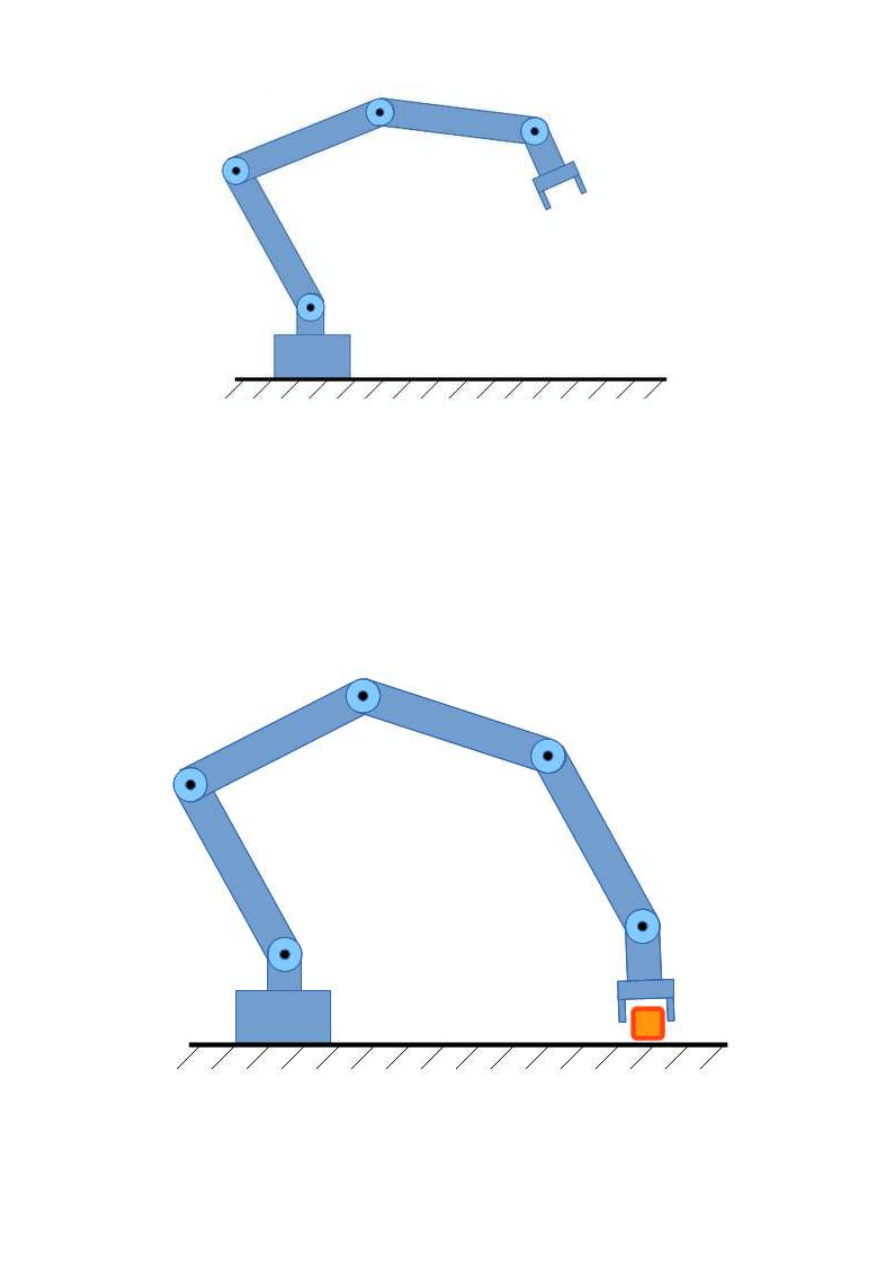
-3
17. Jaki jest stopień redundancji konstrukcji?
-1
18. Manipulator zamontowany na nieruchomej podstawie zbudowany jest z
pięciu ruchomych segmentów połączonych pięcioma przegubami obrotowymi
jak na rysunku. Ile stopni swobody ma ta konstrukcja?
-5

19. Jaka jest minimalna liczba współrzędnych potrzebna do opisania położenia
ciała sztywnego w przestrzeni trójwymiarowej?
-6
20. Przy pomocy ilu współrzędnych (parametrów) opisuje się przegub w notacji
Denavita-Hartenberga?
-4
21. Ile współrzędnych jest potrzebne do opisania położenia PUNKTU w
przestrzeni trójwymiarowej?
-3
Sensory
22. Ośmiobitowy przetwornik absolutny z kodem Grey'a na wyjściu ma
rozdzielczość:
-256
23. W systemie „North Star” stosowanym do pozycjonowania robotów MINT
pozycję robota określa się na podstawie:
-pomiaru kąta pomiędzy namiarami na dwa punkty na suficie
24. Kod Grey'a stosowany jest w przetwornikach położenia w celu:
-wyeliminowania błędów odczytu położenia

25. Który zestaw urządzeń pomiarowych umożliwia prowadzenie nawigacji
zliczeniowej na płaszczyźnie?
-żyroskop i dwa akcelerometry
26.Obracająca się tarcza żyroskopu mechanicznego, zamocowana w uchwycie
pozwalającym na obrót wokół osi X, Y i Z (3 stopnie swobody) będzie:
-zachowywała stały moment pędu
27.Żyrokompas optyczny zbudowany ze światłowodu ułożonego na
płaszczyźnie XY w okrąg o promieniu R służy do pomiaru:
-prędkości obrotowej wokół osi Z
28. Ekstrakcja cech jest etapem obróbki sygnału z czujnika (np. kamery,
skanera laserowego, mikrofonu, itp.) Polega ona na:
-wyszukaniu w zarejestrowanym zbiorze danych (obrazie) ciągów lub
obszarów do których można przypisać pewne właściwości (np. kształt,
kolor, itp.)
29. Technika „time-of-light” (TOF) stosowana w czujnikach optycznych dla
robotyki jest metodą pomiaru pozwalającą na:
-wyznaczenie odległości do obiektów znajdujących się w polu widzenia
kamery
Konstrukcje
30. Co się dzieje z końcówkami trawy odciętymi przez robota do utrzymania

trawnika (np. Husqvarna)?
-opadają na ziemię i tam pozostają
31. Który z dostępnych komercyjnie robotów czyszczących jest konstrukcją
wyłącznie mechaniczną, nie posiadającą żadnego zaawansowanego układu
sterowania?
-RoboMop
32. Samoczyszczące się taśmy wykorzystywane w robotach poruszających się
po pionowych ścianach imitują rozwiązanie zaobserwowane w naturze
(gekony). Siłę przylegania do powierzchni uzyskuje się w tych taśmach
wykorzystując zjawisko:
-oddziaływania międzycząsteczkowego Van der Waalsa
33. Manipulator PUMA - pierwszy stosowany na szeroką skalę robot
przemysłowy miał napęd:
-elektryczny
34. Roboty przeznaczone do czyszczenia basenów są dociskane do czyszczonej
powierzchni:
-siłą odrzutu wody
35. Przykład robota Leo, skonstruowanego przez zespół z MIT dowodzi, że
komunikacja człowieka z maszyną może odbywać się:
-poprzez mowę, gesty i mimikę twarzy
36. Która z technik pokrycia powierzchni jest najczęściej stosowana w robotach
czyszczących (przeznaczonych do zamiatania podłogi)?
-losowy wybór kierunku ruchu

Interfejsy
37. Roboty socjalne, przeznaczone do współpracy z człowiekiem powinny
(według Prof. C. Breazeal i dr H. Knight):
-wchodzić w relacje z człowiekiem ale nie zastępować innych ludzi
38. Proszę zaznaczyć sytuację, w której robot pełni rolę
mentora(instruktora/nadzorcy) człowieka:
-robot oprowadza ludzi po muzeum
39. Proszę zaznaczyć sytuację, w której robot pełni rolę partnera działającego w
bezpośredniej bliskości człowieka:
-robot zabawia publiczność śpiewając lub opowiadając dowcipy
40. W przemysłowych systemach sterowania wyposażonych w terminale
dotykowe złą praktyką jest:
-użycie ikon bez opisu słownego
41. Eksperyment przeprowadzony prze zespół dr Cynthia Breazeal, w którym
ludzie, którzy chcieli schudnąć realizowali zalecenia trenera zapisane na kartce,
w programie komputerowym zainstalowanym na laptopie lub w pamięci
prostego robota humanoidalnego, wykazał że uczestnicy eksperymentu...
-poświęcali najwięcej czasu analizie zapisów i zaleceń przekazywanych
przez robota

42. Terminem „uncanny valley” („zadziwiająca dolina”) nazywa się:
-zjawisko polegające na tym, że człowiek źle reaguje na roboty
humanoidalne do złudzenia podobne do człowieka
43. Jef Raskin w książce „The Human Interface” wyraził pogląd, że okienka
zawierające komunikaty ostrzegawcze (np. „Czy na pewno chcesz skasować ten
plik”), jakie można spotkać w wielu współczesnych interfejsach...
-są po pewnym czasie ignorowane przez użytkownika i nie spełniają swojej
roli
44. Jef Raskin w książce "The Human Interface" wyraził pogląd, że każda
funkcja interfejsu użytkownika (np. otwarcie pliku, zapis danych, zmiana
nazwy) powinna być osiągalna ...
-zawsze tylko w jeden sposób - np. tylko przy użyciu klawiatury albo tylko
przy użyciu myszy.
45. Według Masahiro Mori, japońskiego naukowca zajmującego się
konstruowaniem robotów, człowiek ...
-reaguje negatywnie na widok robota do złudzenia podobnego do człowieka
ale równocześnie obdarza sympatią dużo mniej doskonałe konstrukcje.
Roboty na kołach
46. Co, według zespołu Sebastiana Thrun, zadecydowało o przewadze
samochodu wystawionego przez Uniwersytet Stanforda do wyścigu DARPA
Challenge i pozwoliło wygrać ten wyścig? (dwukrotnie)?
-Oprogramowanie – algorytmy sztucznej inteligencji, dzięki którym
samochód „nauczył się” jazdy w warunkach pustyni od człowieka
47. Ile osób ginie na drogach USA w ciągu roku?
-30 000
48. Ile osób (w przybliżeniu) ginie na drogach w Polsce w ciągu roku? Ile osób
mogłoby ocalić życie gdyby samochody autonomiczne były w powszechnym
użyciu?
-5000
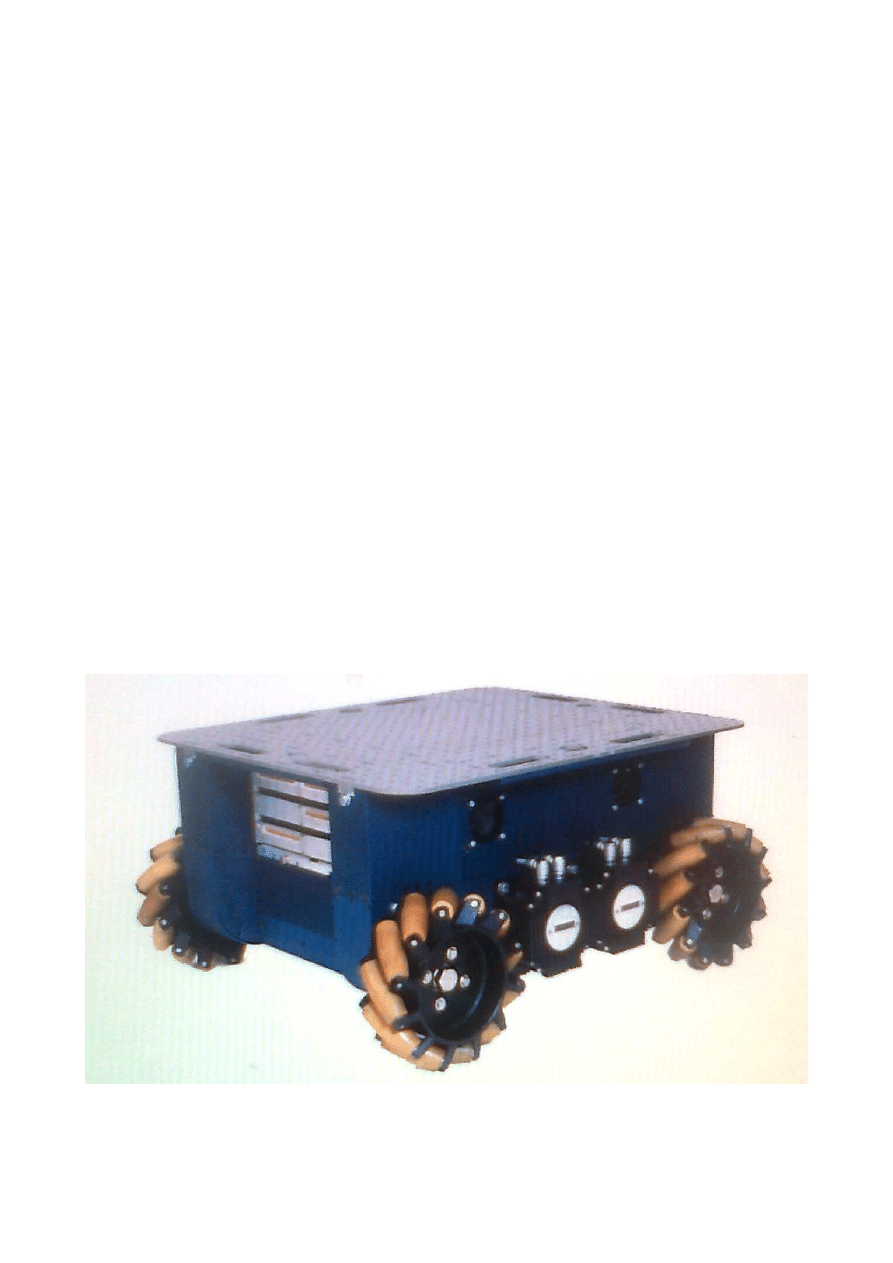
49. Każdego robota mobilnego, poruszającego się na kołach, można zaliczyć do
jednej z pięciu klas oznaczonych dwoma liczbami(dm, ds)
Do jakiej klasy należy robot przedstawiony na zdjęciu?
-(3,0)

Do jakiej klasy należy robot przedstawiony na zdjęciu?
-(1,1)
50. Ile (w przybliżeniu) procent wypadków samochodowych spowodowanych
jest błędem człowieka?
-90%
51. Ile niezależnych silników jest potrzebnych aby czterokołowy robot
wyposażony w koła Mecanum, posiadający stopień mobilności dm=3 mógł w
pełni wykorzystać swoje możliwości?
-4 (każde koło napędzane niezależnie)
52. Podstawową zaletą robotów utrzymujących dynamicznie równowagę na
kuli lub na dwóch współosiowo zamontowanych kołach (jak np. Segway) w
porównaniu do konstrukcji tradycyjnych wózków trój- lub czterokołowych jest:
-zdolność do pokonywania wzniesień i spadków bez utraty stabilności.
53. Wraz z upowszechnieniem się samochodów autonomicznych dokona się
szereg zmian w konstrukcji samochodów, organizacji systemów transportu i
społeczeństwie. Jednym z efektów, przewidywanych w raporcie KPMG "Self
Driving Cars The Next Revolution" jest:
-wyeliminowanie niektórych systemów bezpieczeństwa pasywnego
stosowanych obecnie w samochodach
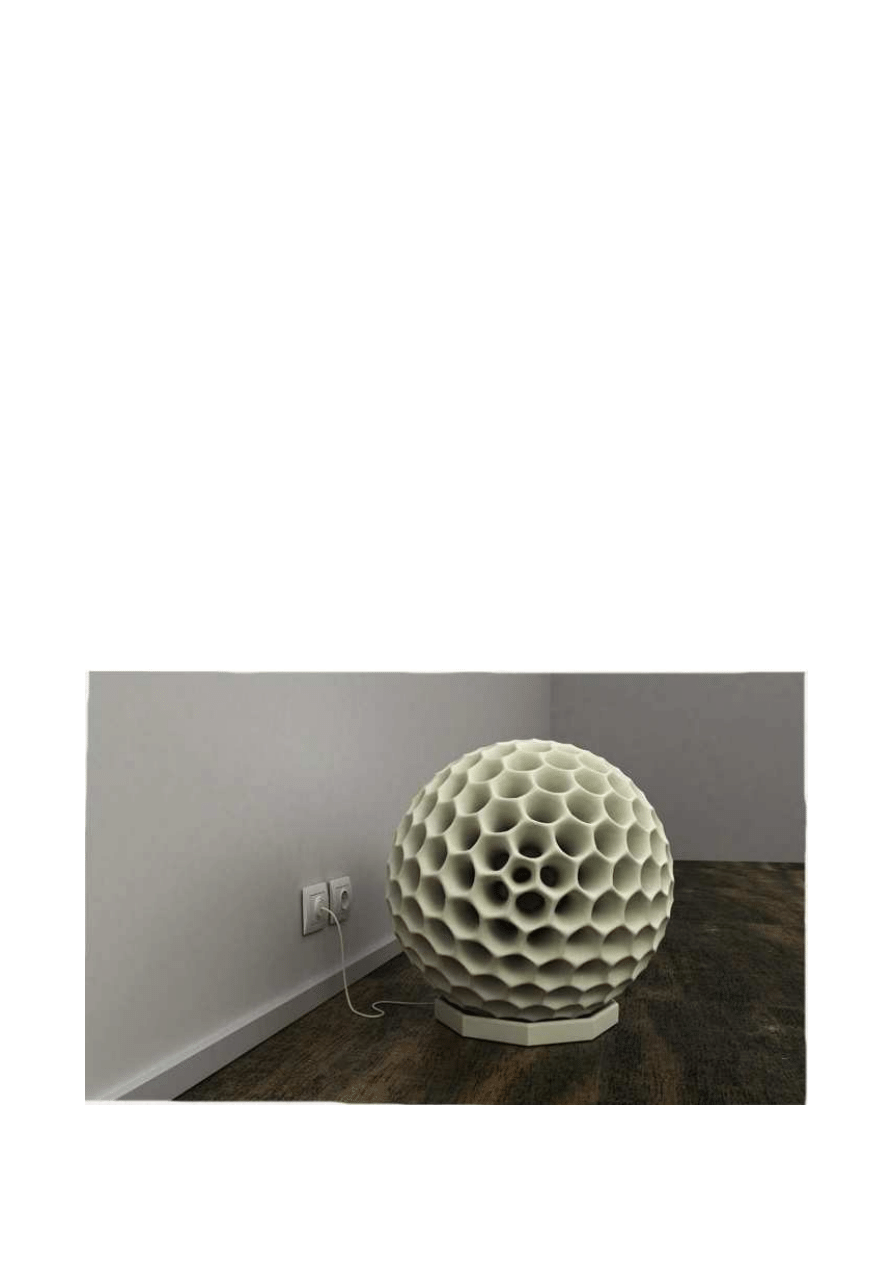
54. Przedstawiony na zdjęciu robot służy do:
-czyszczenia podłogi
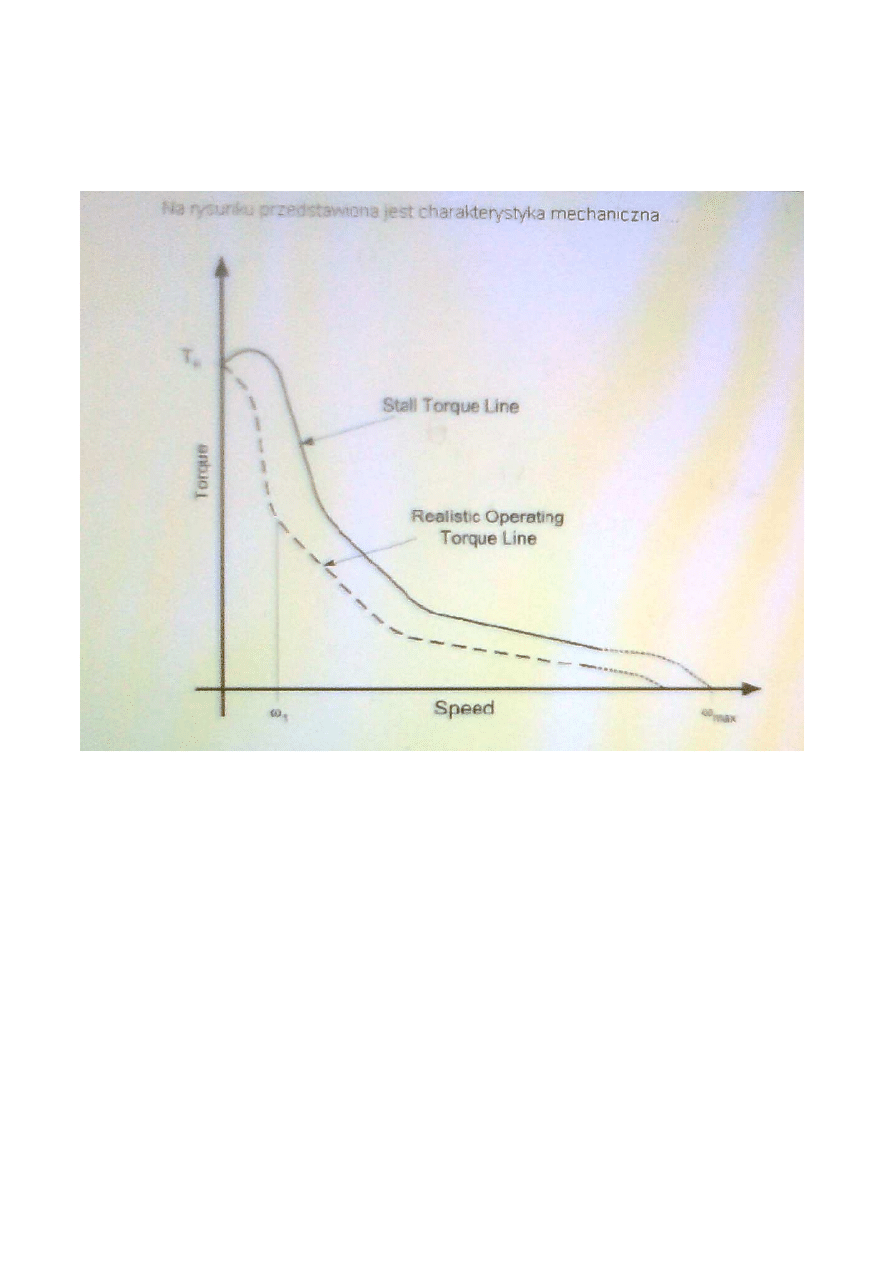
55.
-silnika krokowego
56. Jaki zasięg ma zbudowany w Chorwacji samochód elektryczny Rimac
Concept One?
-400-600km
57. W algorytmie genetycznym, operacja crossover(krzyżowanie)polega na:
-Wymianie pewnej losowo wybranej ilości genów

58. W algorytmach genetycznych odsetek mutacji wynosi:
-0 do 1 %
59. DATA MINING to ogólna nazwa technik służących do:
-uzyskania istotnej informacji z dużej ilości niepowiązanych ze sobą
danych (np. uzyskanie informacji o preferencjach jednostki lub grupy ze
śladów pozostawionych na serwerach w internecie, systemów monitoringu,
kamer, systemów lokalizacji, itp.)
60. W systemie obsługi magazynu KIVA:
-Produkty są ułożone na znormalizowanych stojakach, które mogą być
przesuwane przez roboty
61. Robot obsługi systemu magazynu KIVA:
-Wygląda jak jeżdżące pudło kartonowe(ukryte koła) z dużą śrubą na
górnej ścianie
62. W systemie obsługi magazynu KIVA:
-Roboty dowożą regał z towarem do stanowiska pakowania
63. Quantum locking to zjawisko, które może być wkrótce wykorzystywane w
robotyce. Terminem quantum locking określa się:
-Zjawisko uwięzienia nadprzewodnika w polu magnetycznym
64. W pewnej aplikacji obiektyw kamery musi być nastawiany mechanicznie,
przy pomocy silnika elektrycznego. Zadaniem układu będzie utrzymywanie
ostrości na wybranym, wolno poruszającym się obiekcie. Do tego zastosowania

najlepszy będzie:
-Silnik krokowy ze sterowaniem mikroskokowym
65. Skurcz mięśnia pneumatycznego pracującego ze stałym obciążeniem zależy
od:
-Ciśnienia gazu wypełniającego mięsień
66. Algorytm genetyczny może być użyty do:
-Poszukiwania minimum (lub maksimum) funkcji
-Znalezienia najkrótszej drogi na mapie(pomiędzy zadanymi punktami)
67. Terminem „Cloud Robotics” określa się technologie pozwalające na
obniżenie kosztów budowy robotów oraz skrócenie czasu programowania
układów sterowania. Roboty korzystające z tej technologii:
-Mogą łączyć się z rozproszonymi bazami danych i pobierać stamtąd dane
o obiektach znajdujących się w otoczeniu robota
-Mogą korzystać ze standardowych algorytmów obliczeniowych
uruchomionych na serwerach wchodzących w skład chmury
68. Microstepping stosowany w układach sterowania napędów pozwala na:
-Zwiększenie dokładności(ilości kroków na obrót) silnika krokowego
69. Systemy aktywnego bezpieczeństwa (np. systemy kontroli trakcji, ABS,
ASR, ESP, itp.) instalowane we współczesnych samochodach poprawiają
właściwości trakcyjne pojazdów i przyczyniają się poprawy komfortu jazdy ale
powodują też skutki uboczne z których najważniejszy to:
-Osłabienie koncentracji oraz ignorowanie przez kierowców własnych
ograniczeń, braku umiejętności oraz w niektórych przypadkach
elementarnych zasad bezpieczeństwa

do tych pytań nie mam odpowiedzi:
70. Cechą, która wyróżnia prawdziwego robota od dobrze zaprogramowanego
automatu jest:
-zdolność do podejmowania autonomicznych
działań.
-konstrukcja przypominająca człowieka.
-zdolność do obserwacji otoczenia poprzez zainstalowane urządzenia (kamery,
mikrofony, akcelerometry, itp.).
-ilość pamięci, w jaką został wyposażony sterownik urządzenia.
-zastosowanie baterii zamiast zasilania bezpośrednio z sieci.
71. Powiązanie obrazu uzyskanego z czujnika (np. z kamery lub mikrofonu) z
modelem obiektu zdefiniowanym w pamięci robota polega na:
-Zapisaniu zarejestrowanego obrazu (sygnału) do pamięci robota
-przypisaniu cech określających model obiektu do cech wyodrębnionych w
zarejestrowanym obrazie (sygnale)
-przypisaniu zarejestrowanego obrazu do modelu w pamięci robota
-uzupełnieniu modelu w pamięci danymi z zarejestrowanego obrazu (sygnału)
-dokonaniu korekty zarejestrowanego obrazu na podstawie danych z modelu
obiektu
72. Pozycja zliczona to pozycja wyznaczona na podstawie:
73. Akcelerometr mechaniczny lub piezoelektryczny zamontowany równolegle

do osi Z, może być użyty do pomiaru:
-drogi w osi Z
-Prędkości w osi Z
-Przyspieszenia w osi Z
-Momentu obrotowego w osi Z
-Momentu obrotowego w osi X
-Momentu obrotowego w osi Y
-Przyspieszenia w osi Y
-Przyspieszenia w osi X
-Prędkości obrotowej wokół osi Z
-Kąta obrotu wokół osi Z
Wyszukiwarka
Podobne podstrony:
Opracowanie testu z ergonomii!! Nieznany
Logistyka - Opracowanie testu 2013, na studia
Opracowanie testu D 2
opracowane pytania do testu z wytrzymki(2)
PZS, materiały na egzamin BSI2BSI opracowane zagadnienia testu egzaminacyjnego cz 2
Opracowanie zagadnień do testu z finansów., Zarządzanie ZL
PZS, materiały na egzamin BSI1 opracowane zagadnienia testu egzaminacyjnego cz1
Opracowane pytania z Testu Java 06
opracowane pytania do testu z wytrzymki(2)
Opracowanka, warunkowanie
18 Badanie słuchu fonemowego z uzyciem testu sylab nagłosowychid 17648 ppt
OPRACOWANIE FORMALNE ZBIORÓW W BIBLIOTECE (książka,
postepowanie w sprawach chorob zawodowych opracowanie zg znp
opracowanie 7T#2
Opracowanie FINAL miniaturka id Nieznany
więcej podobnych podstron