
Komponenty mechatroniczne - Podręcznik
Minos
3
Spis treści:
1
Czujniki indukcyjne........................................................................................................... 7
1.1 Informacje
podstawowe.................................................................................................... 7
1.2 Podstawy
teoretyczne
..................................................................................................... 8
1.2.1 Układ rezonansowy .......................................................................................................... 8
1.2.2 Układ elektroniczny ........................................................................................................ 10
1.3 Konstrukcja
podstawowa
............................................................................................... 11
1.3.1 Zasada
pracy.................................................................................................................. 11
1.3.2 Współczynniki korekcyjne .............................................................................................. 14
1.3.3 Sposób
zabudowy .......................................................................................................... 15
1.4. Czujniki
specjalne........................................................................................................... 17
1.4.1 Czujniki
indukcyjne
pierścieniowe .................................................................................. 17
1.4.2 Czujniki
pracujące w silnym polu elektromagnetycznym................................................ 18
1.4.3 Czujniki
pracujące w trudnych warunkach...................................................................... 19
1.5
Rozpoznawanie kierunku ruchu ..................................................................................... 20
1.6 Czujniki
NAMUR............................................................................................................. 21
1.7
Analogowe czujniki indukcyjne....................................................................................... 22
1.8 Zasilanie
prądem stałym ................................................................................................ 23
1.9 Zasilanie
prądem przemiennym (AC)............................................................................. 24
1.10 Zasady
łączenia czujników............................................................................................. 25
1.11
Zabezpieczenia i bezpieczeństwo czujników ................................................................. 27
1.12 Podłączanie czujników do sieci komunikacyjnych.......................................................... 28
1.13 Aplikacje ......................................................................................................................... 29
2
Czujniki pojemnościowe ................................................................................................. 29
2.1
Informacje podstawowe.................................................................................................. 29
2.2
Podstawy teoretyczne ................................................................................................... 30
2.3
Zasada działania czujnika pojemnościowego ................................................................ 32
2.4
Typy czujników pojemnościowych.................................................................................. 35
2.5
Materiał obiektu .............................................................................................................. 37
2.6
Kompensacja zakłóceń ................................................................................................. 39

Komponenty mechatroniczne - Podręcznik
Minos
4
2.7
Aplikacje.......................................................................................................................... 40
3
Czujniki ultradźwiekowe.................................................................................................. 42
3.1
Informacje podstawowe ................................................................................................. 43
3.2
Podstawy teoretyczne..................................................................................................... 44
3.2.1 Rozchodzenie się fal dźwiękowych w powietrzu............................................................. 43
3.2.2 Wpływ środowiska .......................................................................................................... 46
3.2.3 Przetworniki fali ultradźwiekowej .................................................................................... 47
3.2.4 Wytwarzanie fali ultradźwiękowej ................................................................................... 50
3.3
Zasada pracy czujnika ultradźwiekowego....................................................................... 54
3.3.1 Tryb dyfuzyjny................................................................................................................. 56
3.3.2 Tryb przelotowy............................................................................................................... 59
3.4
Zakłócenia pracy czujników ............................................................................................ 61
3.4.1 Czynniki fizyczne ............................................................................................................ 61
3.4.2 Czynniki montażowe ....................................................................................................... 61
3.4.3 Synchronizacja czujników ............................................................................................... 63
3.5
Specjalne czujniki ultradźwiękowe.................................................................................. 64
3.5.1 Czujnik refleksyjny .......................................................................................................... 64
3.5.2 Czujniki z dwoma przetwornikami w jednej obudowie .................................................... 67
3.6 Czujniki
z
wyjściem analogowym.................................................................................... 69
3.7
Aplikacje.......................................................................................................................... 71
4 Czujniki
fotoelektryczne .................................................................................................. 76
4.1 Charakterystyka
konstrukcji ............................................................................................ 76
4.2
Elementy fotoelektryczne................................................................................................ 78
4.2.1 Podstawy fizyczne .......................................................................................................... 78
4.2.1.1 Światło ............................................................................................................................ 80
4.2.1.2 Własności światła............................................................................................................ 80
4.2.2 Fotoemitery .................................................................................................................... 82
4.2.2.1 Diody elektroluminescencyjne (LED) .............................................................................. 83
4.2.2.2 Diody laserowe (LD) ....................................................................................................... 86
4.2.3 Fotodetektory .................................................................................................................. 88
4.2.3.1 Fotodiody ........................................................................................................................ 88
4.2.3.2 Fotodetektory liniowe PSD.............................................................................................. 91
4.2.3.3 Fotodetektory liniowe CCD .............................................................................................92
4.2.3.4 Fototranzystory ............................................................................................................... 93
4.3
Podstawowe rodzaje czujników ...................................................................................... 94
4.3.1 Czujnik przelotowy .......................................................................................................... 94
4.3.2 Czujniki refleksyjne ......................................................................................................... 96

Komponenty mechatroniczne - Podręcznik
Minos
5
4.3.3 Czujniki dyfuzyjne........................................................................................................... 99
4.4
Przetwarzanie sygnału ................................................................................................. 101
4.4.1 Źródła zakłóceń interferencyjnych................................................................................ 101
4.4.2 Zapobieganie interferencji ............................................................................................ 103
4.4.2.1 Modulacja światła ......................................................................................................... 103
4.4.2.2 Polaryzacja światła ...................................................................................................... 104
4.4.3 Margines działania ...................................................................................................... 106
4.4.4 Odległość robocza........................................................................................................ 109
4.4.5 Czas reakcji.................................................................................................................. 111
4.5
Specjalne rodzaje czujników ........................................................................................ 112
4.5.1 Czujniki refleksyjne z polaryzacją światła .................................................................... 112
4.5.2 Czujniki dyfuzyjne z eliminacja wpływu tła i pierwszego planu .................................... 113
4.5.3 Czujniki refleksyjne z autokolimacją............................................................................. 117
4.5.4 Czujniki ze światłowodami............................................................................................ 118
4.5.4.1 Światłowody ................................................................................................................. 118
4.5.4.2 Zasada działania .......................................................................................................... 121
4.6
Technika połączeń ....................................................................................................... 123
4.6.1 Typy połączeń .............................................................................................................. 123
4.6.2 Przełączanie wyjścia czujnika ...................................................................................... 124
4.7
Aplikacje ....................................................................................................................... 127
5
Czujniki magnetyczne .................................................................................................. 128
5.1
Informacje podstawowe................................................................................................ 129
5.2
Podstawy teoretyczne .................................................................................................. 130
5.2.1 Pole
magnetyczne........................................................................................................ 129
5.2.2 Kontaktron .................................................................................................................... 132
5.2.3 Efekt
Halla .................................................................................................................... 134
5.2.4 Efekt magnetorezystancyjny ........................................................................................ 135
5.2.5 Efekt Wieganda ............................................................................................................ 136
5.3
Czujniki magnetyczne z kontaktronem ........................................................................ 137
5.4
Czujniki magnetyczne z hallotronem............................................................................ 140
5.5.
Czujniki magnetyczne specjalne .................................................................................. 141
5.5.1 Czujniki magnetorezystancyjne.................................................................................... 141
5.5.2 Czujniki magnetyczne Wieganda ................................................................................. 142
5.5.3 Czujniki magnetyczne z magnesem ............................................................................. 144
5.6
Warunki zabudowy ....................................................................................................... 145
5.7
Aplikacje ....................................................................................................................... 147
Komponenty mechatroniczne - Podręcznik
Minos
1
Czujniki indukcyjne
1.1
Informacje podstawowe
Czujniki indukcyjne stanowią najpopularniejszą grupę czujników sto-
sowanych w układach automatyki. Wykorzystywane są one do kontroli
położenia, przemieszczeń i ruchu mechanizmów związanych ze ste-
rowanymi urządzeniami. Ich prosta i zwarta konstrukcja, duża pew-
ność i niezawodność działania oraz łatwy montaż sprawia, że są chęt-
nie stosowane.
Czujniki te reagują, na pojawienie się przedmiotów metalowych w stre-
fie ich działania, przełączeniem stanu wyjścia czujnika lub zmianą war-
tości sygnału wyjściowego.
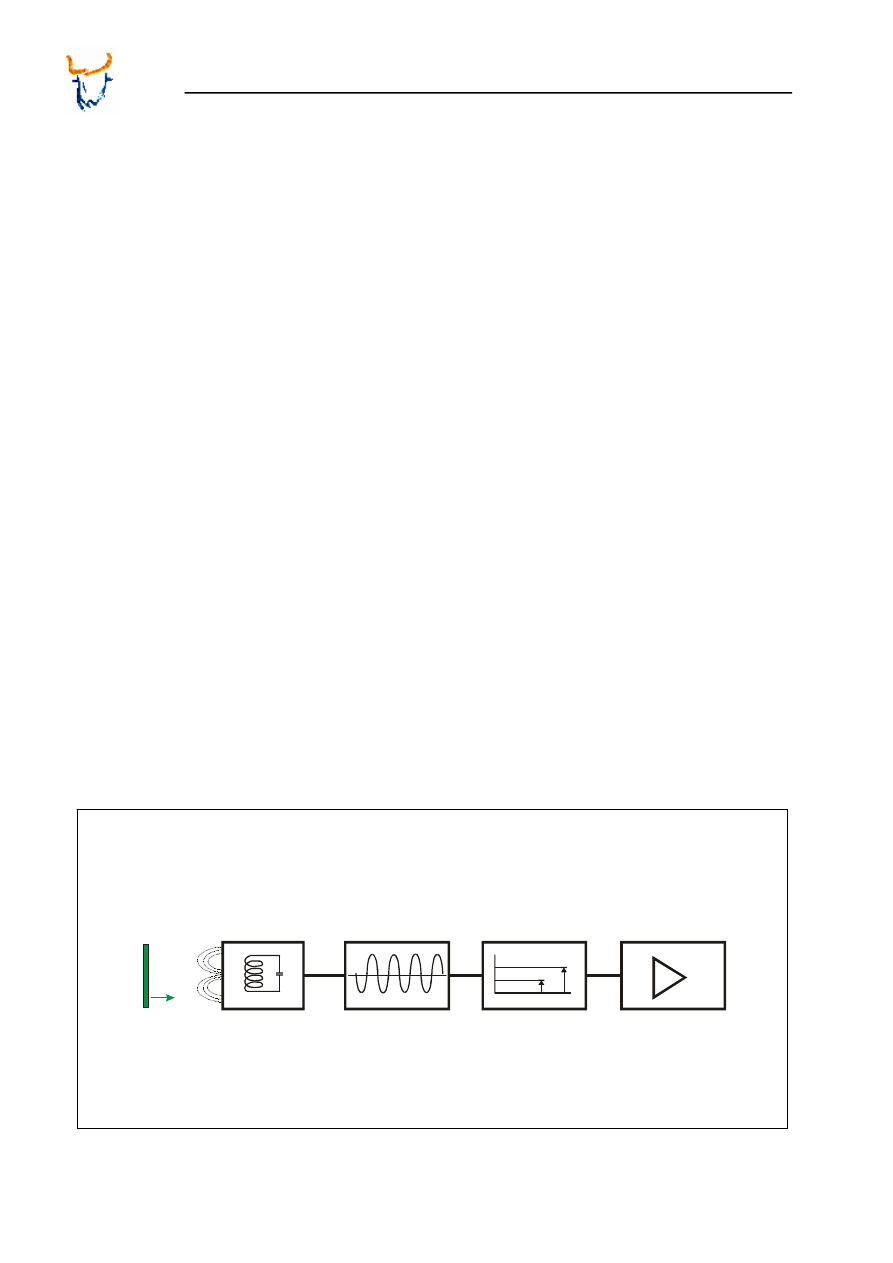
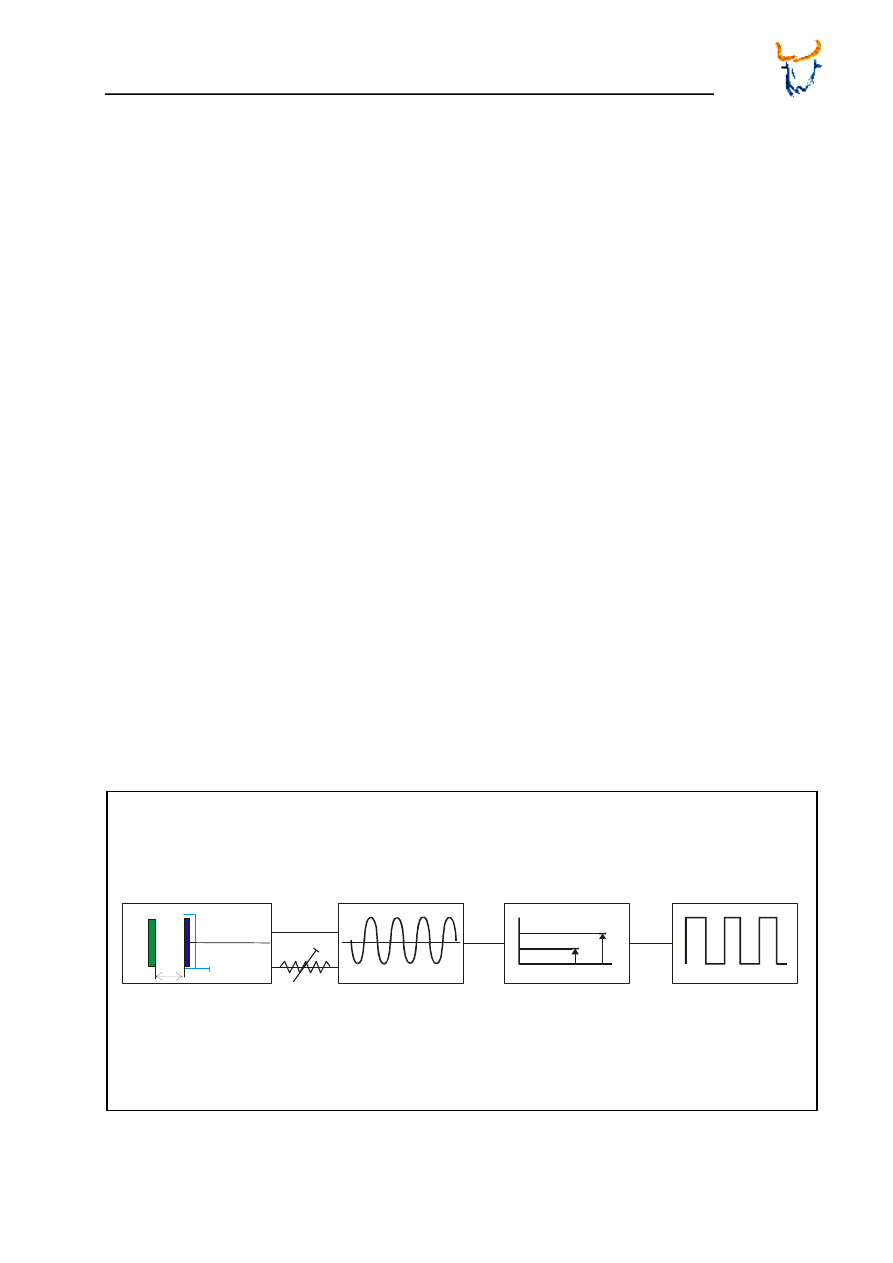
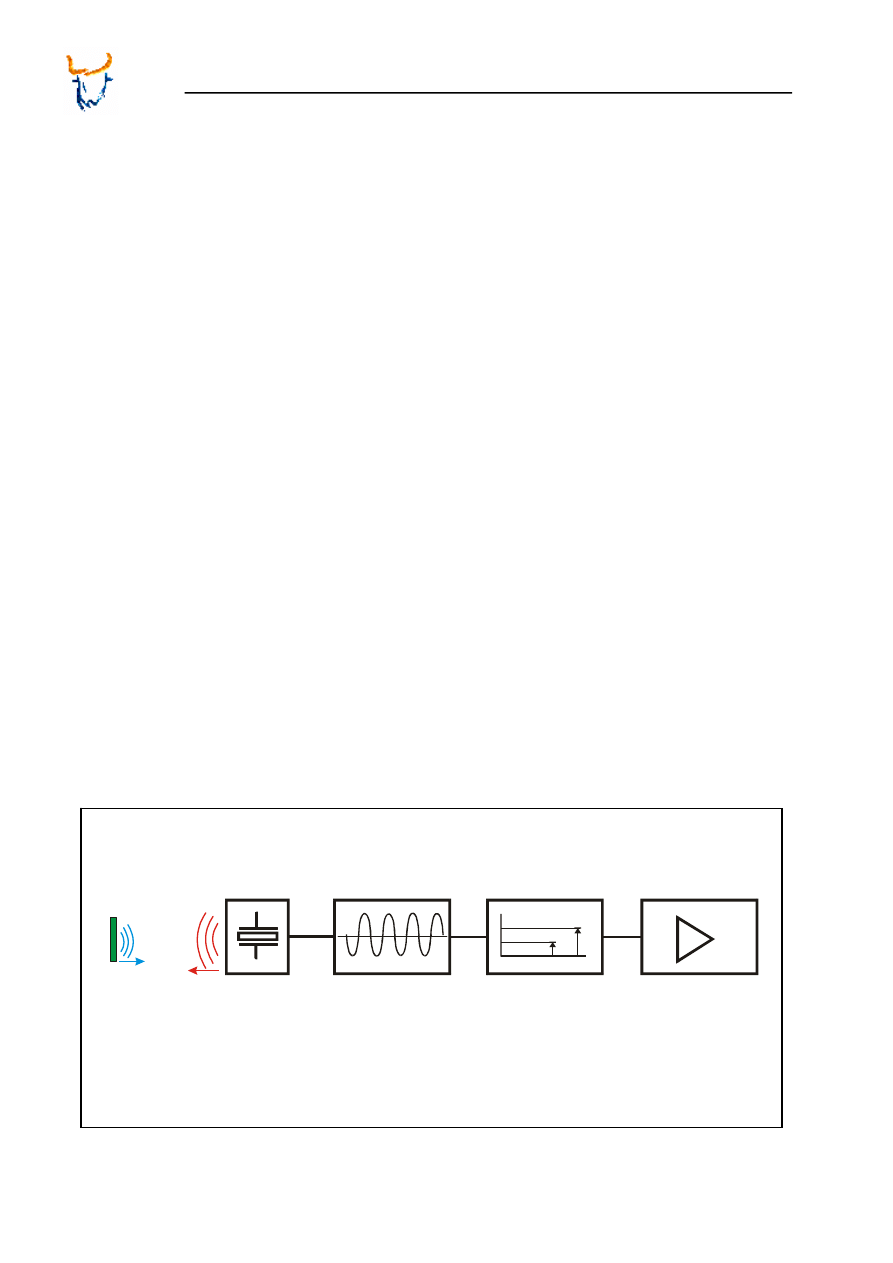
Podstawowymi składnikami czujnika indukcyjnego są (rys.1.1): głowica
zawierająca cewkę indukcyjną z rdzeniem ferrytowym, generator na-
pięcia sinusoidalnego, układ detekcji (komparator) i wzmacniacz wyj-
ściowy.
Obwód indukcyjny składający się z cewki i rdzenia ferrytowego wytwa-
rza wokół czoła czujnika zmienne pole elektromagnetyczne o wysokiej
częstotliwości. Pole to indukuje prądy wirowe w metalu zbliżanym do
czujnika, co z kolei powoduje obciążenie obwodu indukcyjnego i w
efekcie spadek amplitudy oscylacji. Wielkość tych zmian zależy od od-
ległości przedmiotu metalowego od czoła czujnika. Przełączenie wyj-
ścia następuje po zbliżeniu metalu na określoną odległość, wynikającą
z charakterystyki czujnika. W czujnikach z wyjściem analogowym po-
ziom sygnału wyjściowego jest odwrotnie proporcjonalny do odległości
obiektu od czujnika.
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
GENERATORA
GŁOWICA
CZUJNIKA
OBIEKT
L
C
Rys. 1.1:
Budowa czujnika indukcyjnego
6
Komponenty mechatroniczne - Podręcznik
Minos
1.2
Podstawy teoretyczne
1.2.1
Układ rezonansowy
Źródłem zmiennego pola magnetycznego w czujnikach indukcyjnych
jest cewka indukcyjna. Jeżeli prąd przepływający przez cewkę zmienia
się w czasie, to strumień magnetyczny w cewce też jest zmienny.
Zmianom tym towarzyszy zawsze zjawisko samoindukcji tzn. powsta-
wanie dodatkowego napięcia w zwojach cewki, przeciwdziałającego
zmianom prądu.
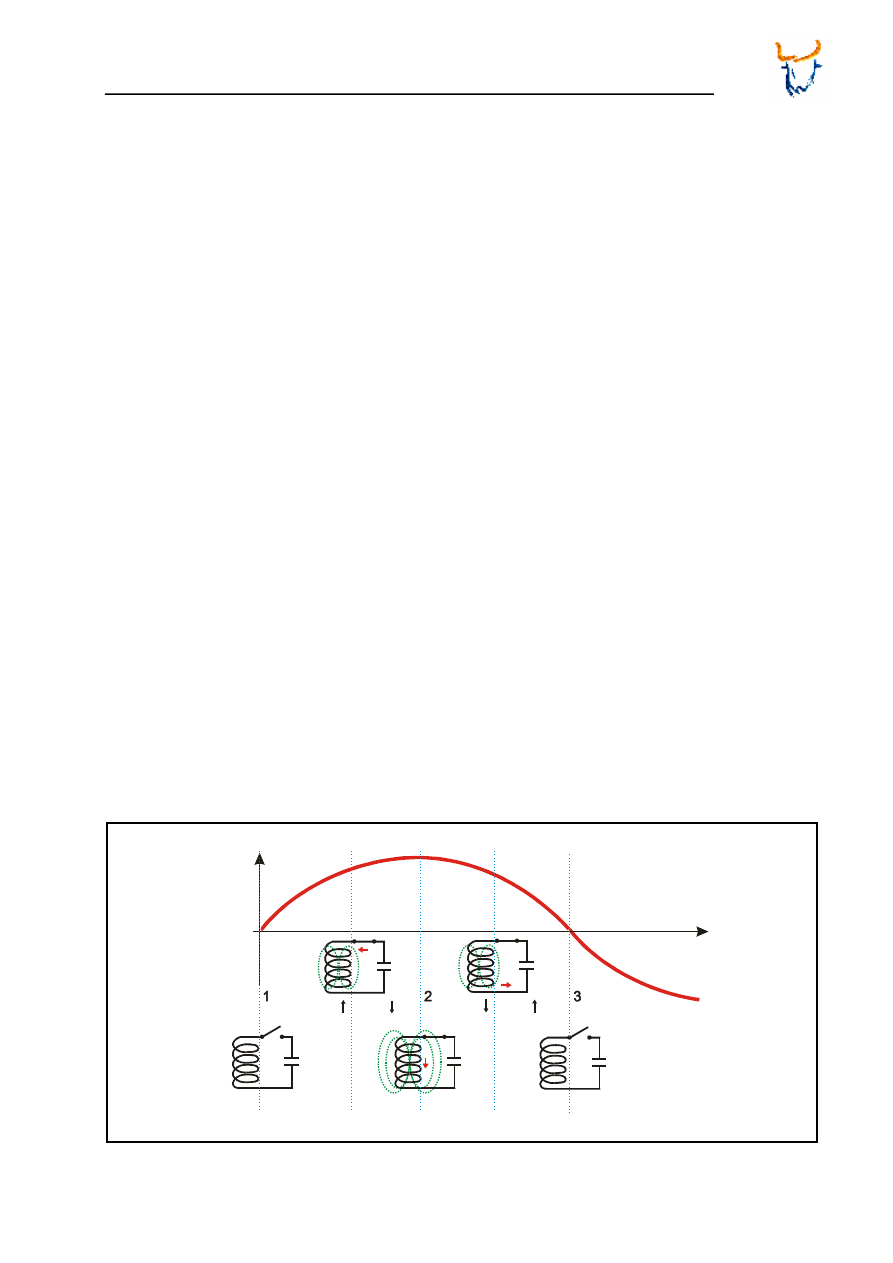
W elektrycznych układach rezonansowych całkowita energia jest
zgromadzona w postaci energii pola magnetycznego E
L
cewki induk-
cyjnej i energii pola elektrycznego naładowanego kondensatora E
c
. W
każdej chwili suma tych energii jest taka sama
tzn. E = E
L
+
E
c
= const. (rys. 1.2).
W początkowej fazie obwód LC, składający się z cewki L i kondensato-
ra C jest otwarty, a cała energia zmagazynowana jest na okładkach
naładowanego kondensatora (1). Po zamknięciu obwodu kondensator
zaczyna się rozładowywać i w obwodzie rozpocznie płynąć prąd I
zmieniając swoją wartość od zera do I
max
. Cała energia kondensatora
zostanie zmagazynowana w cewce (2).
Pomimo, że kondensator jest już całkowicie rozładowany prąd dalej
płynie w obwodzie, w tym samym kierunku. Jego źródłem jest zjawisko
samoindukcji w cewce, które podtrzymuje słabnący prąd. Ten prąd ła-
duje kondensator, więc energia jest ponownie przekazywana do kon-
densatora. Gdy ładunek na kondensatorze osiąga maksimum prąd w
obwodzie całkowicie zanika (3). Stan końcowy jest więc taki jak po-
czątkowy tylko kondensator jest naładowany odwrotnie i prąd w obwo-
dzie popłynie w przeciwnym kierunku. W obwodzie LC występują za-
tem oscylacje pola elektrycznego w kondensatorze i oscylacje pola
magnetycznego w cewce.
E =0
C
E =E
L
+
-
E -
C
E -
L
+
+
-
-
E =E
C
E =0
L
+
-
+
-
E =E
C
E =0
L
I
+
-
E -
C
E -
L
I
I
t
L
C
L
C
L
C
L
C
L
C
Rys. 1.2:
Oscylacje w obwodzie LC
7
Komponenty mechatroniczne - Podręcznik
Minos
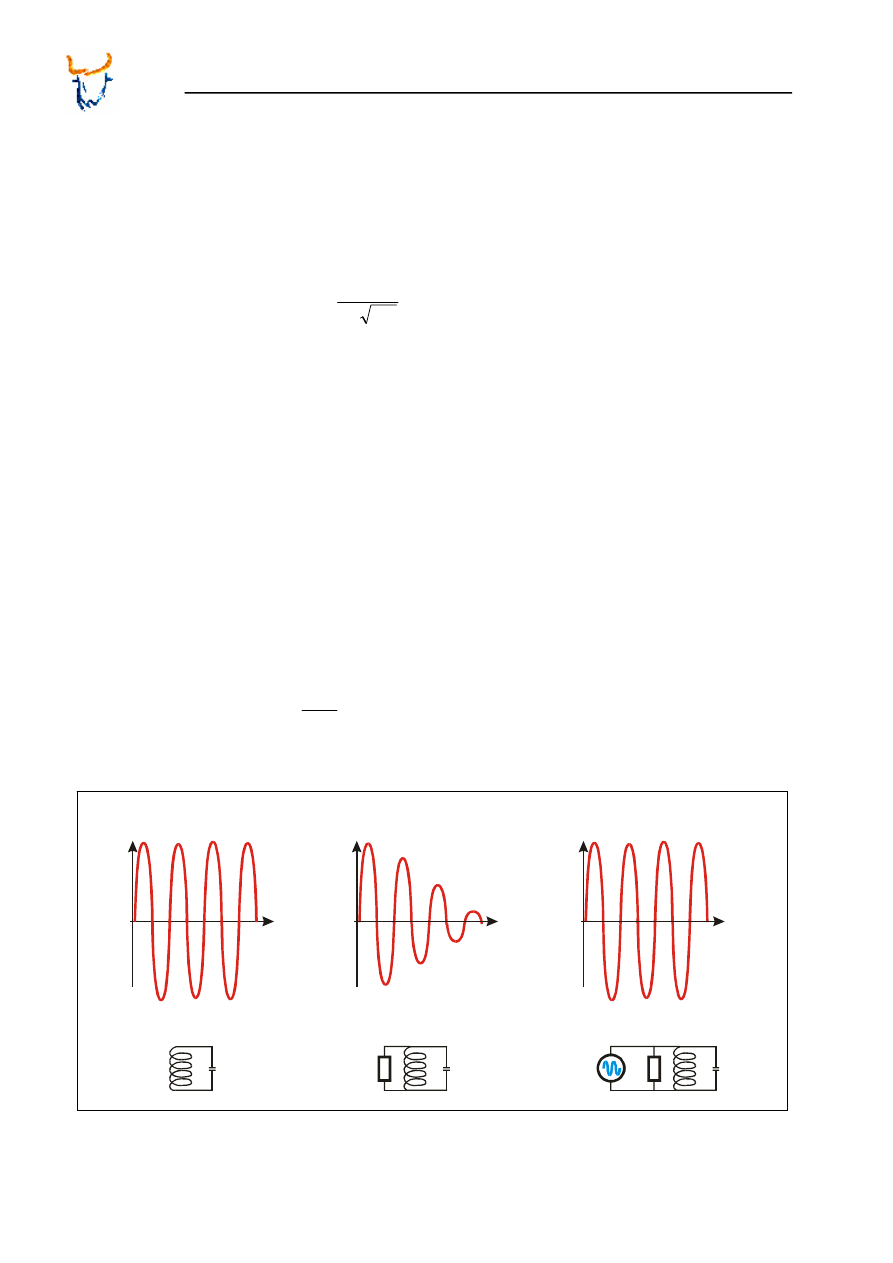
W rzeczywistych obwodach LC występują zawsze dodatkowe straty
energii, związane z własną rezystancją cewki i kondensatora. Z powo-
du tych strat oscylacje obwodu z rezystancją RLC będą tłumione (za-
nikające) (rys. 1.3). Oscylacje obwodu można podtrzymać, zasilając go
z zewnętrznego źródła napięciem sinusoidalnym. Maksymalna ampli-
tuda oscylacji wystąpi, gdy częstotliwość źródła podtrzymującego bę-
dzie równa częstotliwości własnej nietłumionego obwodu LC.
LC
f
f
π
2
1
0
=
=
[Hz],
gdzie:
f
– częstotliwość zewnętrznego źródła sinusoidalnego,
f
0
- częstotliwość własna nietłumionego obwodu LC,
L – indukcyjność [Henr],
C – pojemność [Farad].
Jest to warunkiem wystąpienia rezonansu napięć lub prądów w obwo-
dzie. Maksimum amplitudy oscylacji w obwodzie jest tym wyższe im
większa jest wartość współczynnika dobroci obwodu.
Współczynnik dobroci Q jest miarą strat powstających w elementach L
i C, reprezentowanych przez rezystancję równoległą R. Bezstratny
obwód miałby w warunkach rezonansu, nieskończenie dużą rezystan-
cję równoległą R. Im większe są straty w obwodzie tym rezystancja
równoległa jest mniejsza, a tym samym współczynnik dobroci też jest
mniejszy.
fL
R
Q
π
2
=
a)
b)
c)
L
C
R
L
C
R
G
RLC
RLC
L
C
LC
Rys. 1.3:
Oscylacje obwodów LC i RLC: a) obwód LC nietłumiony, b)obwód RLC bez źródła
zewnętrznego, c) obwód RLC zasilany sinusoidalnym źródłem zewnętrznym
8
Komponenty mechatroniczne - Podręcznik
Minos
1.2.2
Układ elektroniczny
W generatorach zawierających układ rezonansowy, składający się z
cewki i kondensatora, dla podtrzymania oscylacji stosuje się wzmac-
niacze operacyjne lub tranzystory.
Dla wystąpienia oscylacji wymagane jest spełnienie niezależnie dwóch
warunków: fazy i amplitudy. Warunek fazy wymaga, aby napięcie wyj-
ściowe było w fazie z napięciem wejściowym. Warunek amplitudy wy-
maga, aby wzmacniacz całkowicie kompensował tłumienie wprowa-
dzane przez obwód rezonansowy. W takim przypadku generator sam
dostarcza na wejście sygnał podtrzymujący oscylacje. Spełnienie wa-
runku fazy i amplitudy osiąga się przez odpowiedni podział obwodu LC
lub poprzez sprzężenie transformatorowe.
Oscylacje napięcia i prądu wytwarzane są w układzie rezonansowym
LC zawierającym cewkę i kondensator. Prąd doprowadzany do obwo-
du LC przekazuje mu część swej energii - doładowując kondensator, a
tym samym podtrzymując wzbudzane w tym obwodzie oscylacje. Po
ustaleniu się równowagi energii dostarczanej i traconej, amplituda prą-
du płynącego w obwodzie LC nie zmienia się i jego drgania stają się
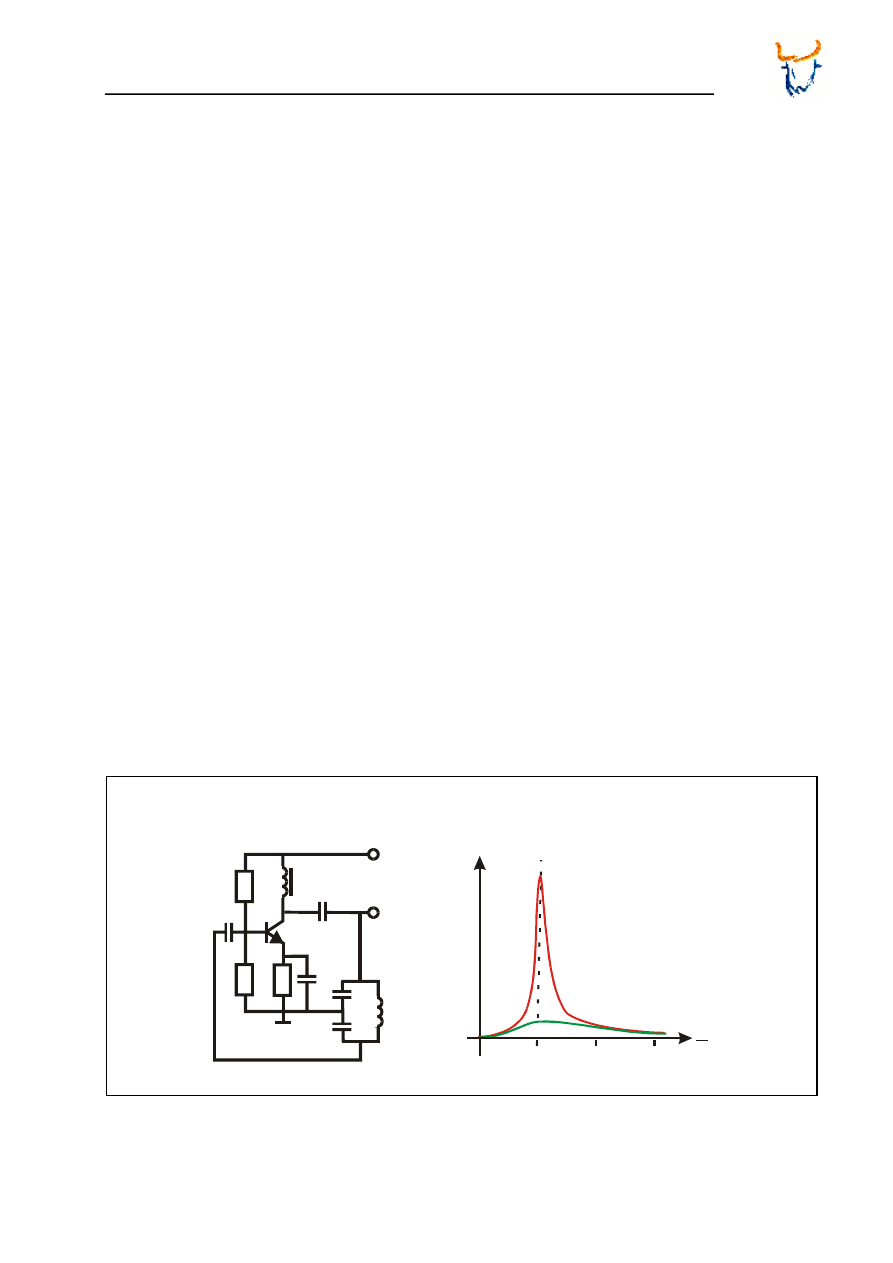
niegasnącymi. Przykład takiego układu generatora LC przedstawia
Rys. 1.4a.
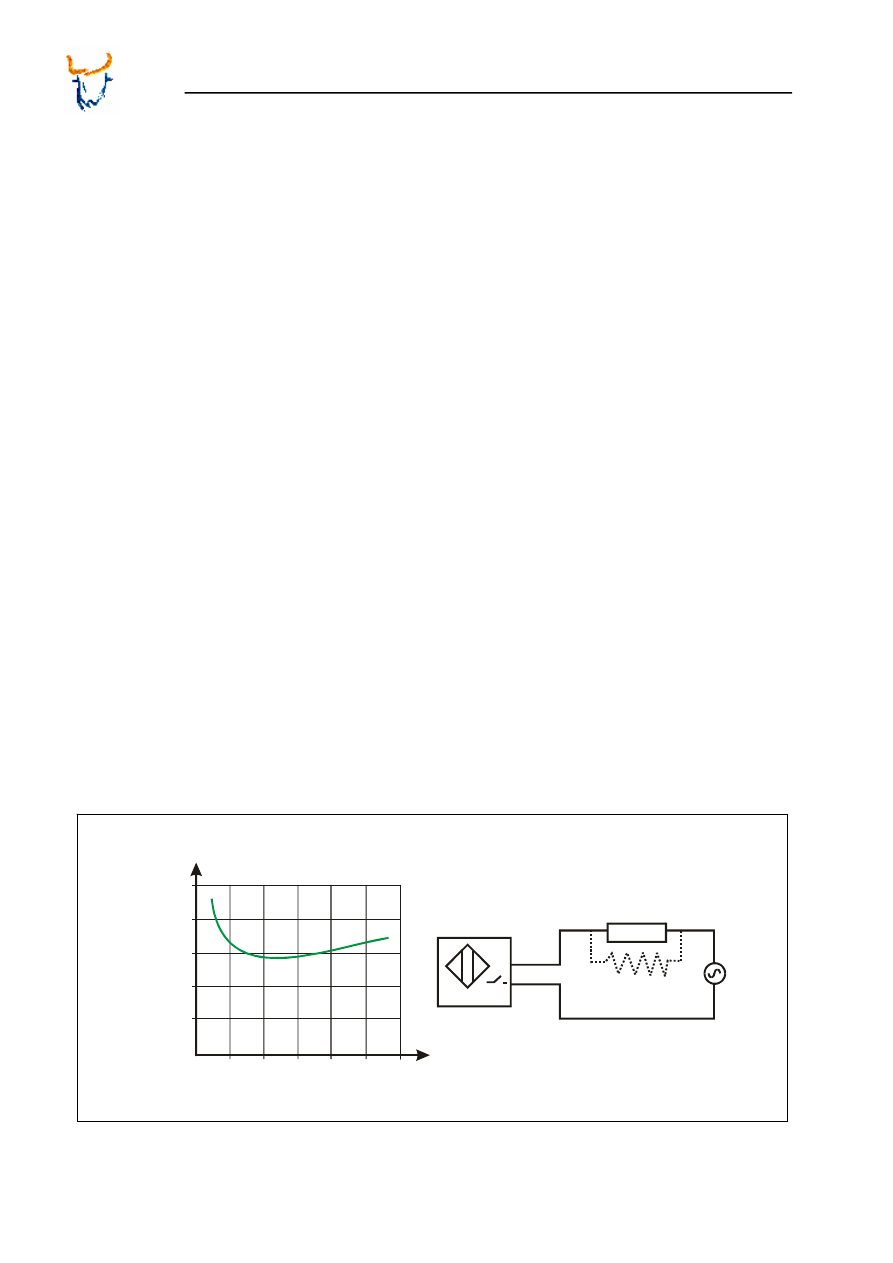
Poziom sygnału wyjściowego zależy od współczynnika dobroci Q
układu rezonansowego. Mała dobroć istotnie zmniejsza sygnał wyj-
ściowy z układu elektronicznego (rys. 1.4.b). Generatory LC są stoso-
wane do generowania przebiegów o częstości większej od kilkudzie-
sięciu kiloherców. Przy mniejszych częstotliwościach wymagana jest
zbyt duża wartość indukcyjności L obwodu rezonansowego. Trudno
wówczas uzyskać dużą dobroć obwodu, a cewki osiągają duże wymia-
ry.
a)
b)
U
D
ω
ω
0
Q=10
Q=1
1
2
3
+U
U
D
C
1
C
2
L
Rys. 1.4:
Układ elektroniczny: a)generator LC ze wzmacniaczem kompensującym tłumienie
w obwodzie, b) poziom sygnału wyjściowego dla różnych wartości Q
9
Komponenty mechatroniczne - Podręcznik
Minos
1.3
Konstrukcja podstawowa
1.3.1
Zasada pracy
Część aktywna czujnika indukcyjnego zawiera cewkę nawiniętą na fer-
rytowym rdzeniu kubkowym, wytwarzającą zmienne pole magnetycz-
ne. Zadaniem rdzenia kubkowego, o otwartym obwodzie magnetycz-
nym, jest wzmocnienie strumienia magnetycznego cewki oraz skiero-
wanie go w kierunku strefy pomiarowej czujnika.
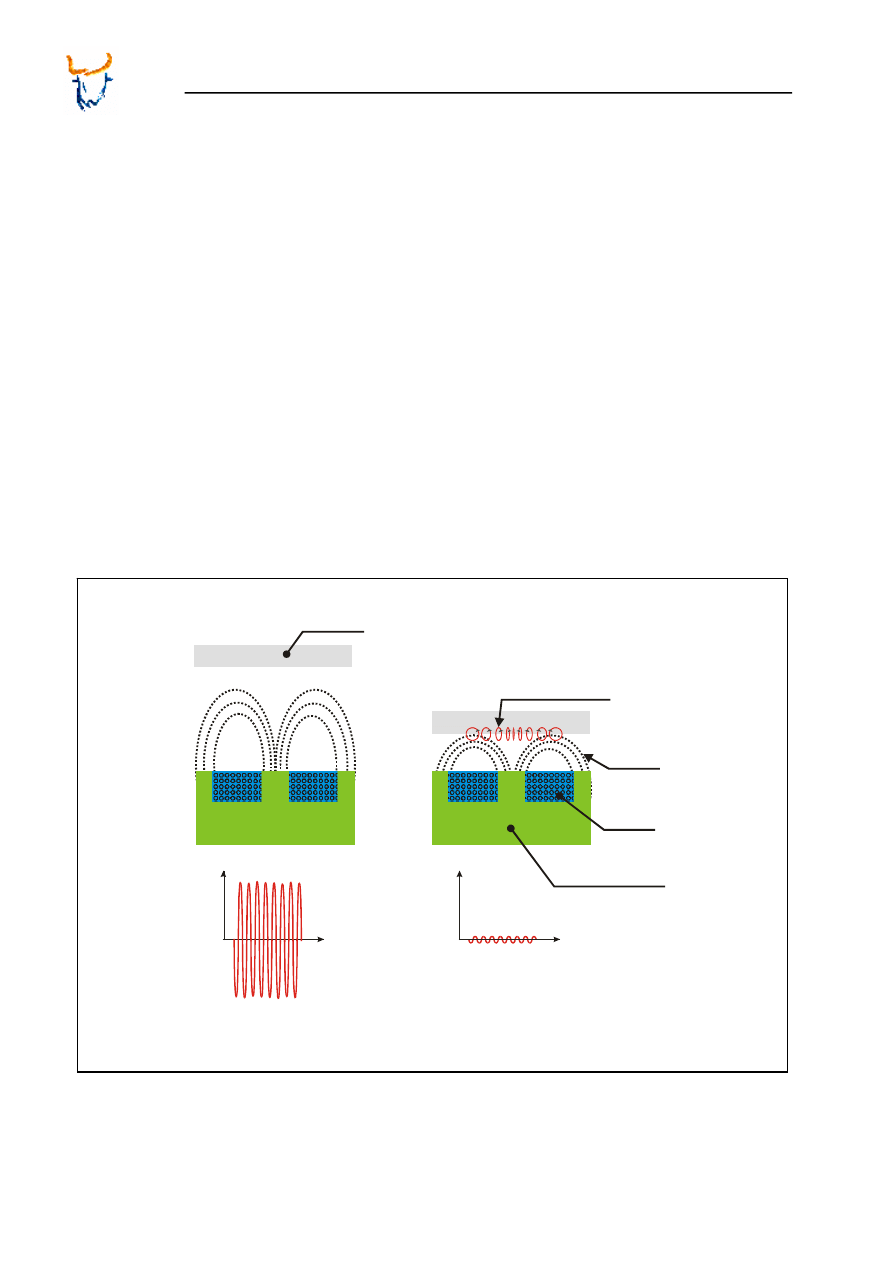
Zmianom pola magnetycznego towarzyszy zawsze powstanie pola
elektrycznego (wirowego), gdy w tym zmiennym polu znajdzie się
przewodnik. Wokół linii pola elektrycznego pojawi się pole magnetycz-
ne wirowe (rys. 1.5). Przeciwdziała ono polu magnetycznemu cewki,
odbierając część energii z obwodu rezonansowego.
Jest to równoznaczne ze zmianą strat w obwodzie rezonansowym, co
powoduje pogorszenie jego dobroci. Skutkuje to
tłumieniem amplitudy
oscylacji. Tłumienie amplitudy utrzymuje się przez cały czas przeby-
wania obiektu przewodzącego w strefie działania pola magnetycznego
cewki. Po usunięciu przedmiotu tłumienie obwodu rezonansowego za-
nika i amplituda oscylacji powraca do wartości początkowej.
Amplituda
Czas
Amplituda
Czas
Pole magnetyczne
prądów wirowych
Obiekt
przewodzący
Pole
magnetyczne
cewki
Rdzeń
ferromagnetyczny
Uzwojenia
cewki
Rys. 1.5:
Obiekt metalowy w polu magnetycznym cewki z rdzeniem ferrytowym
Układ elektroniczny czujnika określa odległość przedmiotu od cewki,
na podstawie stopnia tłumienia amplitudy i generuje sygnał wyjściowy.
Najczęściej jest to sygnał dwustanowy: obiekt jest w zasięgu czujnika
10
Komponenty mechatroniczne - Podręcznik
Minos
lub go nie ma; rzadziej analogowy – odwrotnie proporcjonalny do od-
ległości obiektu od czujnika.
Poza częścią detekcyjną w skład układu elektronicznego czujnika
wchodzi komparator z histerezą i układ wykonawczy (wyjściowy).
Dzięki histerezie unika się zakłóceń, które mogłyby się pojawić na wyj-
ściu czujnika w chwili przełączania oraz w przypadku niestabilnego po-
łożenia albo też drgań wykrywanego przedmiotu oraz zakłóceń wywo-
łanych wahaniami napięcia zasilania i temperatury otoczenia.
Histereza jest różnicą odległości, przy której czujnik reaguje na zbliża-
nie i oddalanie metalu od jego czoła. Wtedy stan wyjścia zmienia się
z OFF na ON lub z ON na OFF (rys. 1.6). Wartość histerezy zależy od
rodzaju i wielkości czujnika i nie przekracza 20% zakresu pomiarowe-
go. Przy jej występowaniu czujnik będzie prawidłowo pracował również
wtedy, gdy wykrywany przedmiot znajduje się na granicy strefy działa-
nia czujnika. W czujnikach wyposażonych w sygnalizacje stanu wyj-
ścia jest to sygnalizowane świeceniem diody LED.
Generatory LC w czujnikach indukcyjnych wytwarzające zmienne pole
magnetyczne, są generatorami wysokiej częstotliwości (HF) o typo-
wych zakresach 100kHz – 1 MHz. Ze wzrostem średnicy cewki zwięk-
sza się maksymalne obciążenie prądowe, lecz maleje maksymalna
częstotliwość pracy czujnika.
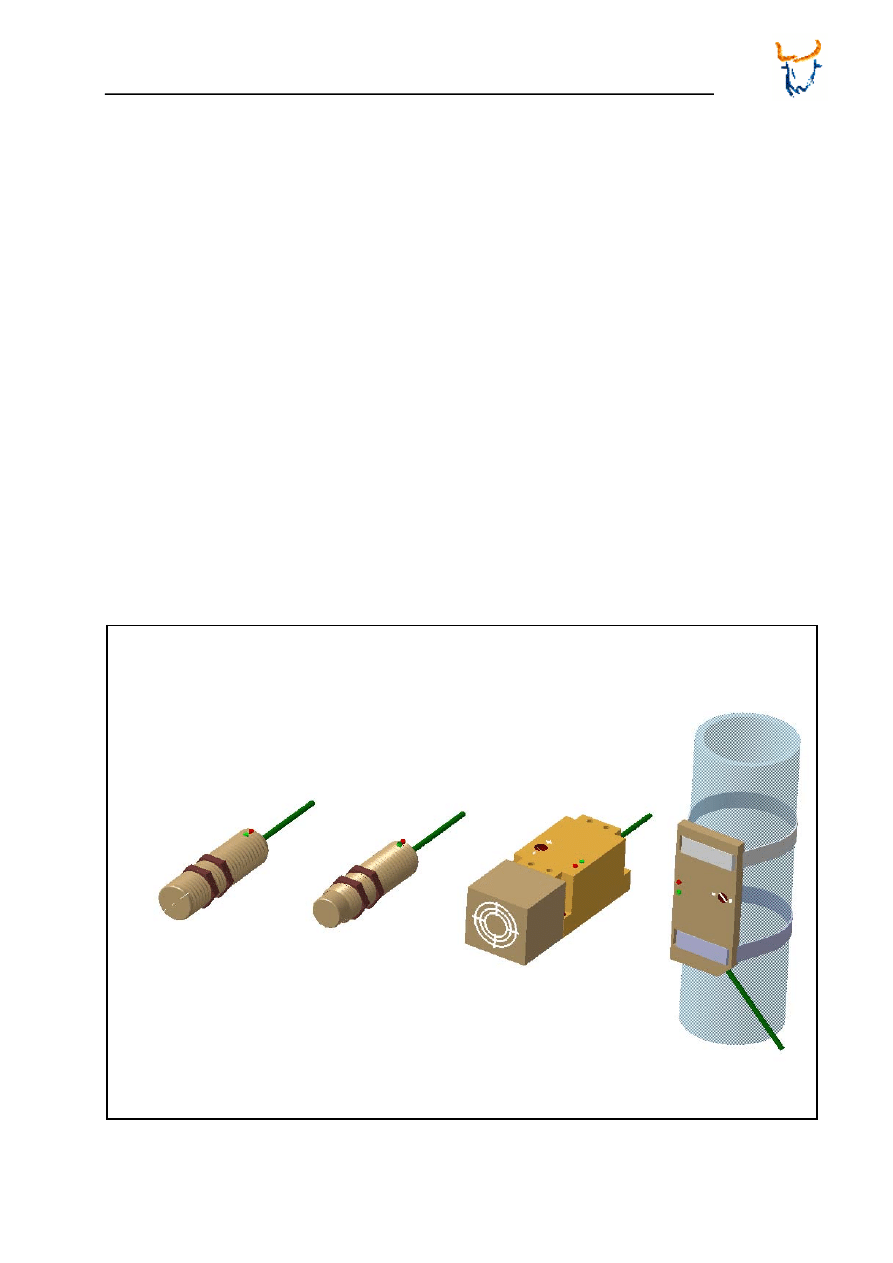
Zasięg działania typowych czujników indukcyjnych nie przekracza
60mm. Czujniki mają zróżnicowane obudowy zarówno cylindryczne
metalowe, jak i prostopadłościenne wykonane z tworzyw sztucznych.
Umożliwia to optymalne zamocowanie czujników w miejscach pomia-
ru.
S
n
S + H
n
ON
OFF
Metal
H
S
S
Rys. 1.6:
Histereza czujnika indukcyjnego
11
Komponenty mechatroniczne - Podręcznik
Minos
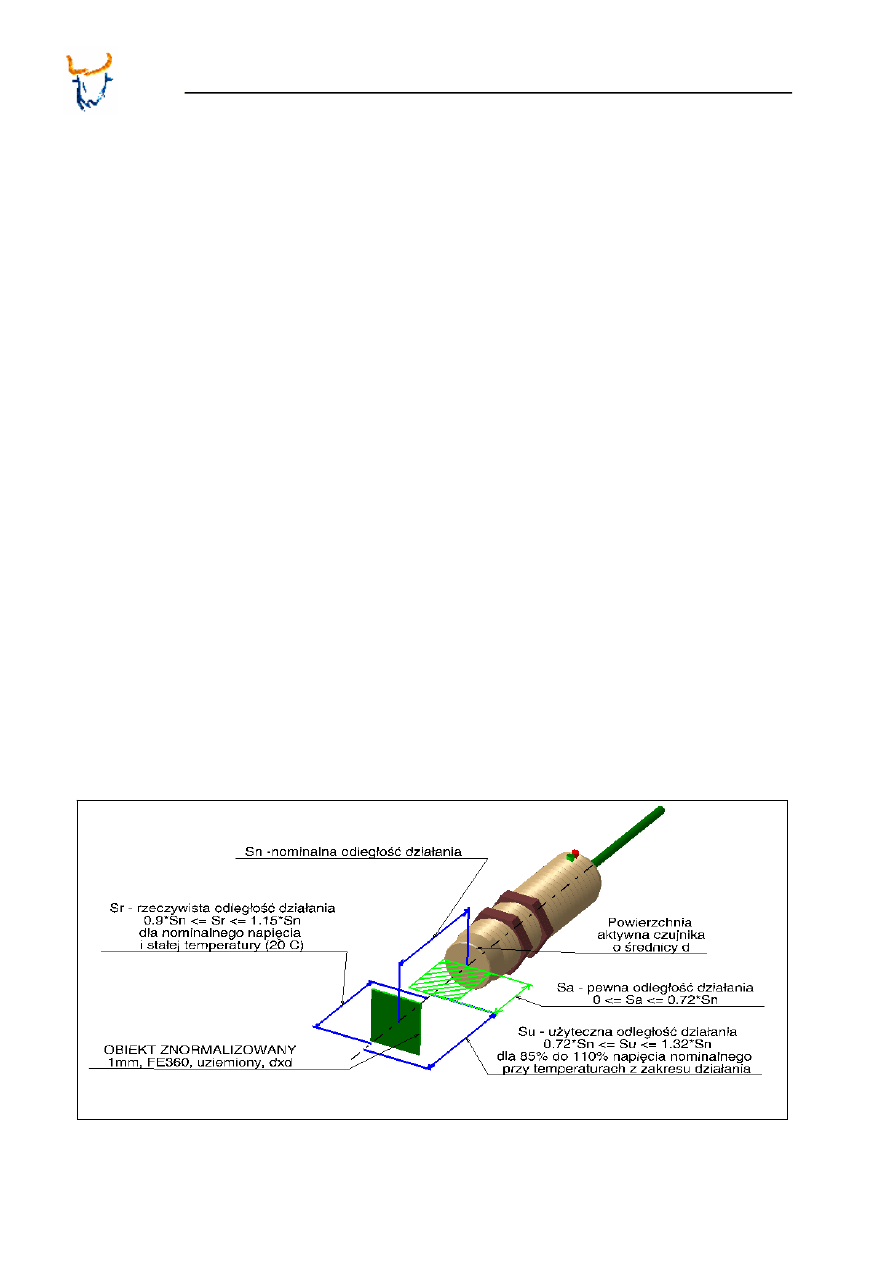
Strumień pola magnetycznego wytwarzanego przez cewkę indukcyjną
obejmuje pewien ograniczony obszar, który wyznacza maksymalny
możliwy zasięg czujnika indukcyjnego.
Odległość od czoła czujnika, przy której następuje przełączenie obwo-
du wyjściowego zdefiniowana jest jako Nominalna strefa działania
S
n
. Właśnie ta wartości podawana jest w danych katalogowych. Wy-
znacza się ją zgodnie z Normą EN 60947-5-2, dla kwadratowej płytki
stalowej (ST37) o boku równym średnicy czujnika i grubości 1mm.
Rzeczywista strefa działania S
r
ustalana w procesie wytwarzania
czujnika może odbiegać nieco od wartości S
n
. Dla nominalnego napię-
cia zasilania i nominalnej temperatury otoczenia mieści się ona w
przedziale: 0,9S
n
≤ S
r
≤ 1,1S
n
.
Dla zwiększenia pewności działania czujnika zalecaną strefą jest Stre-
fa robocza S
a
≤ 0.8S
n
. Wyznacza ona bezpieczny przedział odległości
metalu od czujnika, zapewniając prawidłową pracę w pełnym zakresie
zmian temperatury otoczenia i napięcia zasilania, niezależnie od usta-
wionej przez producenta rzeczywistej strefy działania czujnika.
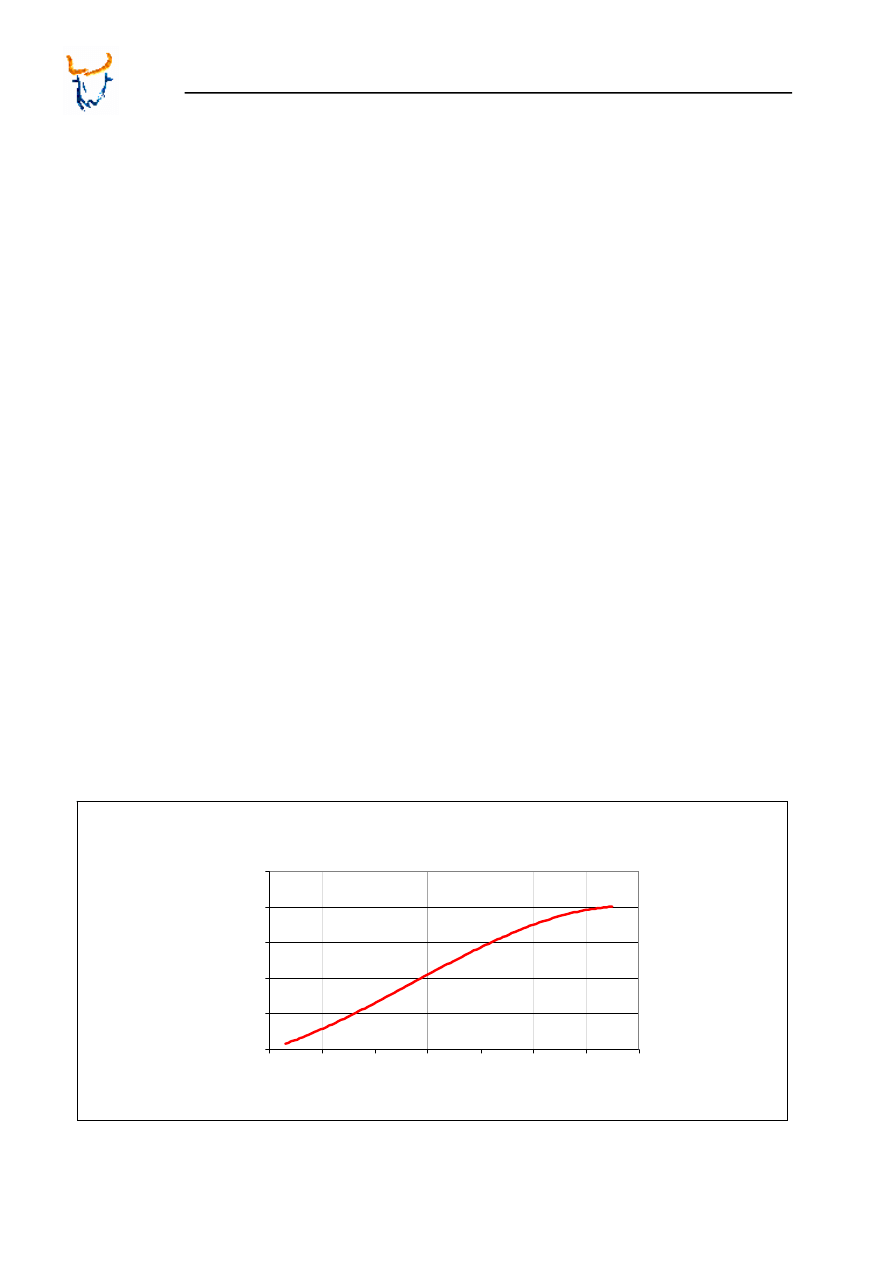
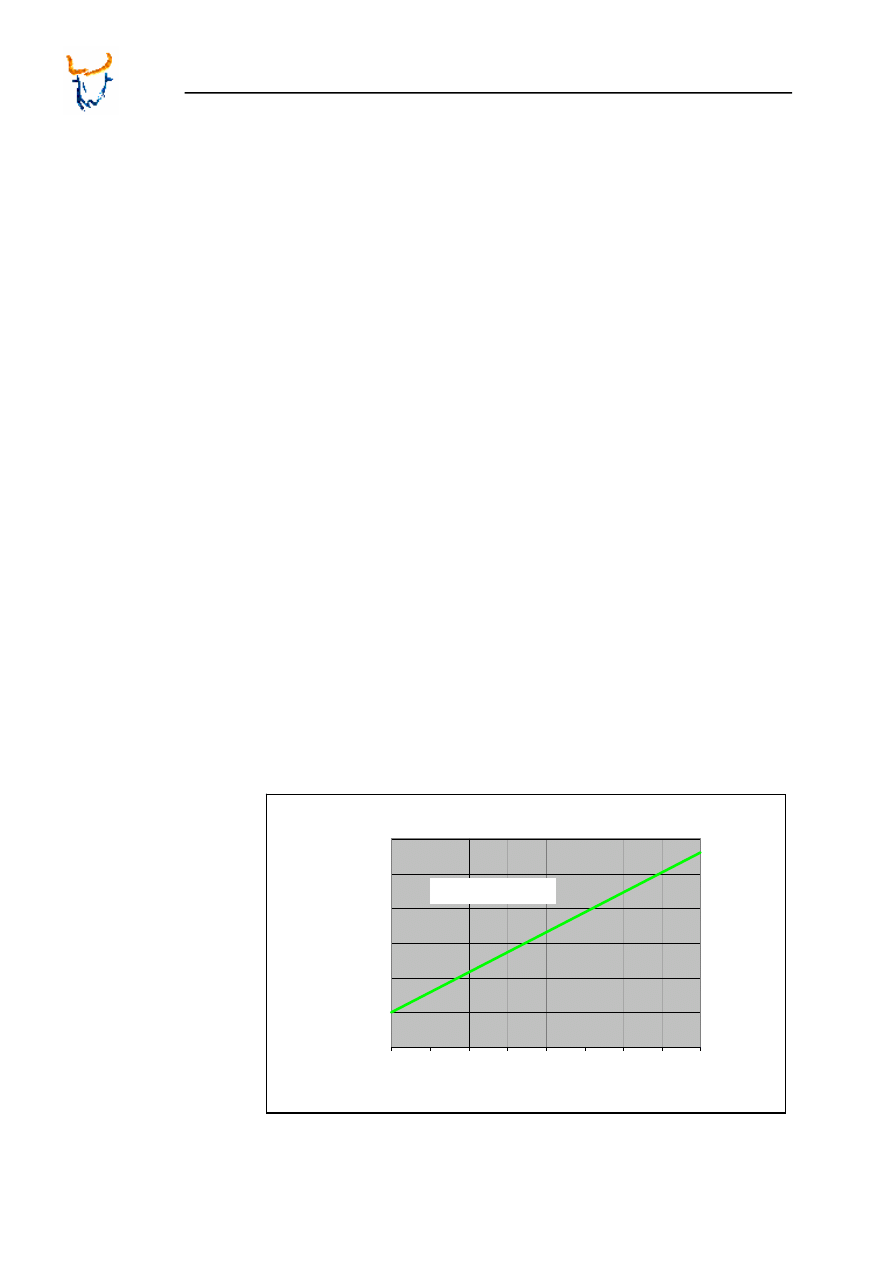
Zakres działania czujnika S
n
zależy od średnicy obudowy D, a dokład-
niej od średnicy cewki i własności rdzenia Rys. 1.7). Czujniki w ma-
łych obudowach mają więc mniejszą strefę działania niż te o więk-
szych gabarytach. Są też wykonania specjalne czujników o zwiększo-
nym zakresie działania.
0
10
20
30
40
50
0
10
20
30
40
50
60
70
D [mm]
Sn [
m
m
]
Rys. 1.7:
Związek pomiędzy średnicą czujnika a nominalną strefą działania standardowych
czujników indukcyjnych
12
Komponenty mechatroniczne - Podręcznik
Minos
1.3.2
Współczynniki korekcyjne
Przedmiot wykrywany tłumi oscylacje obwodu rezonansowego w stop-
niu zależnym od materiału, z jakiego jest wykonany. Materiały takie
jak: złoto, miedź czy aluminium, o większej przewodności elektrycznej
niż stal St37 mniej tłumią oscylacje obwodu rezonansowego.
Te różnice można skompensować zmniejszając odległość przedmiotu
od czujnika. Spowoduje to ograniczenie strefy, w której następuje wy-
krycie przedmiotu. I tak – jeżeli wykrywanym metalem jest mosiądz to
strefę działania Sn, wyznaczoną dla przedmiotu ze stali St37 należy
skorygować mnożąc ją przez współczynnik korekcyjny dla mosiądzu –
0,5 x S
n
Rys. 1.8).
Wpływ na czułość czujnika ma też jego konstrukcja. Są dwie podsta-
wowe konstrukcje czujników w obudowach cylindrycznych:
- osłonięte - cewka indukcyjna obwodu rezonansowego jest schowa-
na wewnątrz tulei tak, że czołem czujnika jest brzeg metalowej tulei
- nieosłonięte - cewka jest wysunięta i umieszczona w dodatkowym
kapturku plastikowym.
Czujniki z wysuniętą cewką charakteryzują się większą czułością i jed-
nocześnie większą wrażliwością na obecność innych obiektów meta-
lowych w ich otoczeniu.
S
n
chrom - 0,90 S
*
n
stal nierdzewna-0,75 S
*
n
mosiądz - 0,50 S
*
n
aluminium - 0,40 S
*
n
złoto - 0,22 S
*
n
stal St37
Rys. 1.8:
Skorygowane zakresy działania czujnika indukcyjnego dla różnych materiałów
przedmiotu wykrywanego
13
Komponenty mechatroniczne - Podręcznik
Minos
1.3.3
Sposób zabudowy
Spełnienie zaleceń montażowych pozwala uniknąć występowania za-
kłóceń w pracy czujników, powodowanych tłumiącym działaniem śro-
dowiska otaczającego czujnik lub wzajemną interferencją pomiędzy
czujnikami. Wielkość i kształt wymaganej wolnej strefy (Free zone) w
pobliżu czujnika zależy od jego strefy działania, konstrukcji i wielkości
wykrywanego przedmiotu (rys. 1.9a).
Obudowy cylindryczne w postaci metalowych tulei rzutują bezpośred-
nio na średnicę osadzanych w nich rdzeni i cewek indukcyjnych. Efek-
tem tego jest silny związek pomiędzy średnicą obudowy a strefą dzia-
łania czujnika oraz wymaganą wolną strefą, w której nie może znajdo-
wać się żaden przedmiot metalowy z wyjątkiem przedmiotu wykrywa-
nego. Czujniki o konstrukcji osłoniętej charakteryzują się większą stre-
fą działania niż czujniki nieosłonięte, więc wolna strefa wokół nich musi
być też większa.
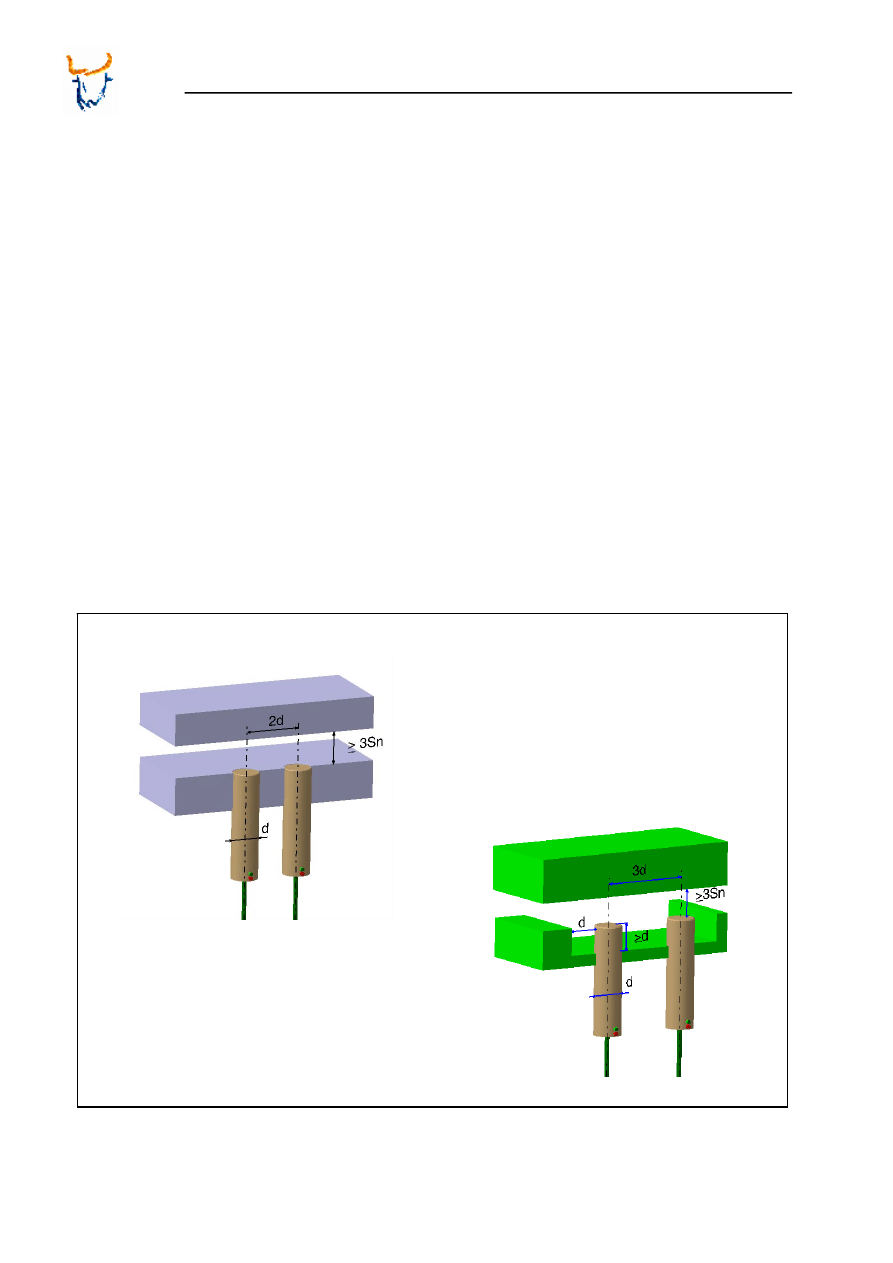
Osłonięty czujnik cylindryczny jest niewrażliwy na otaczające go ele-
menty metalowe z wyjątkiem strefy od strony czoła czujnika. Dlatego
czujniki te mogą być osadzane w całości w elementach metalowych.
Wolną strefę od strony czoła czujnika wyznacza odległość 3Sn (rys.
1.9b). Aby uniknąć wzajemnej interferencji czujników usytuowanych
obok siebie minimalna odległość między nimi powinna być większa od
dwóch średnic D czujnika.
Nieosłonięty czujnik cylindryczny jest wrażliwy na elementy metalowe
otaczające go z trzech stron. Dlatego czujnik musi być częściowo wy-
sunięty, aby wolna strefa obejmowała również boczne powierzchnie
czujnika. W tym przypadku dla uniknięcia interferencji od sąsiednich
czujników, odległość między nimi powinna być większa niż 3xD.
a)
b)
Odległość X [mm]
O
dle
g
ło
ść
Y
[m
m
]
0
0
Y
X
Obiekt
wykrywany
3S
n
2D
8S
n
3S
n
3D
D
D
1.
5D
2S
n
Rys.
1.9:
Czujniki indukcyjne z osłoniętą i nieosłoniętą cewką: a) charakterystyki,
b) zalecenia montażowe
14
Komponenty mechatroniczne - Podręcznik
Minos
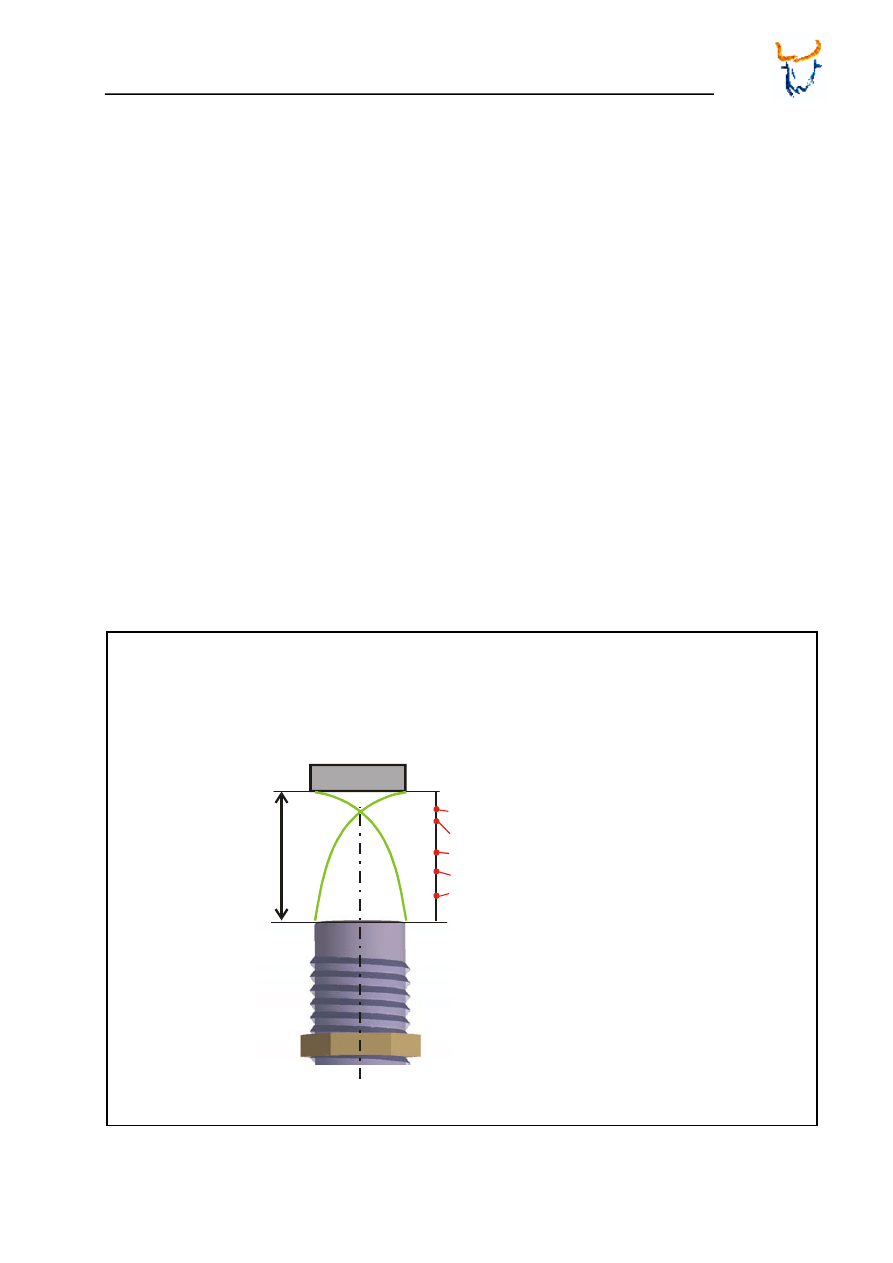
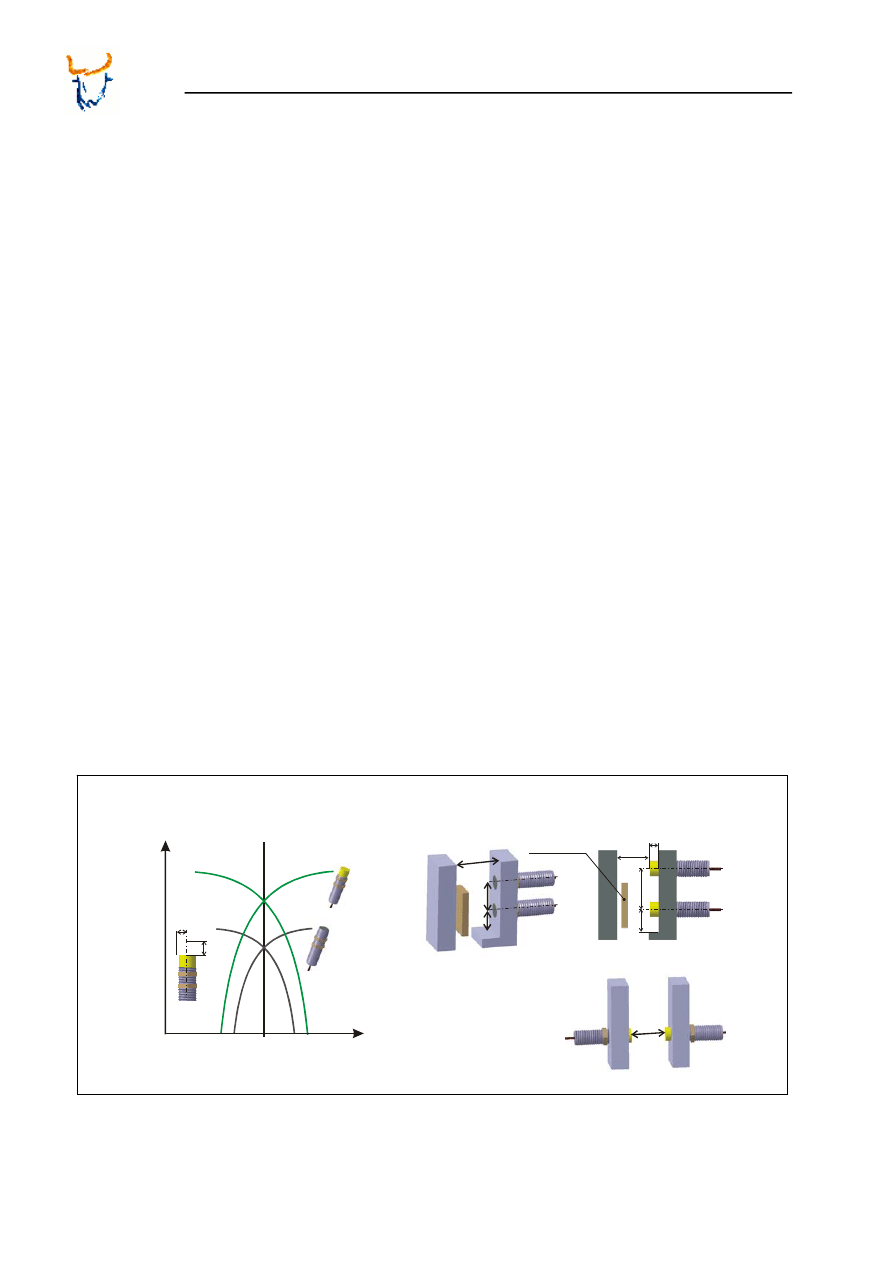
W opisie technicznym każdego czujnika podawana jest maksymalna
częstotliwość przełączania wyjścia, charakterystyczna dla danego
czujnika. Wyraża ona liczbę przełączeń wyjścia czujnika w ciągu se-
kundy, przy cyklicznym wchodzeniu i wychodzeniu przedmiotów wyko-
nanych ze stali St37, z obszaru działania czujnika. Przy jej wyznacza-
niu obowiązują ustalone wymagania techniczne, określone przez nor-
mę EN 50 010/IEC 60947-5-2.
Wymagania dotyczą wymiarów wykrywanego przedmiotu, odległości
od czujnika oraz stosunku długości przedmiotu do długości przerwy
między przedmiotami. Przedmioty ze stali St37, o wymiarach standar-
dowej płytki kwadratowej o boku równym średnicy obudowy czujnika i
grubości 1mm, powinny być osadzone w elemencie z materiału nie-
przewodzącego. Odległość czujnika od takiego przedmiotu powinna
być równa połowie jego strefy nominalnej S
n
(rys. 1.10).
Metoda pomiaru wg EN 50010 bazuje na znajomości stosunku długo-
ści przedmiotu do długości przerwy między przedmiotami równego 1:2.
Odległość taka gwarantuje brak oddziaływania sąsiednich przedmio-
tów na własności pola magnetycznego czujnika. Maksymalna często-
tliwość przełączania wyjścia f obliczana jest z zależności:
f = 1 /(t1 + t2)
gdzie:
t1 – czas potrzebny na przebycie drogi równej długości płytki standar-
dowej,
t2 – czas potrzebny na przebycie drogi równej odległości między kolej-
nymi płytkami.
Wynik pomiaru zawsze będzie zależał od wielkości przedmiotu tłumią-
cego cewkę, odległości od czoła czujnika i szybkości przedmiotu. Uży-
wając przedmiot mniejszy od płytki standardowej, dla określonego
sensora, albo stosując mniejszą przerwę między występami, można
oczekiwać redukcji maksymalnej częstotliwości przełączania wyjścia.
2D
D
D
S /2
n
D
U
D
t
2
t
1
t
1
t
Rys. 1.10:
Wymagania narzucone przez normę EN 50010 przy wyznaczaniu maksymalnej
częstotliwości przełączeń wyjścia czujnika indukcyjnego
15
Komponenty mechatroniczne - Podręcznik
Minos
1.4
Czujniki specjalne
1.4.1
Czujniki indukcyjne pierścieniowe
W indukcyjnych czujnikach pierścieniowych obszar aktywny znajduje
się wewnątrz pierścieniowej obudowy czujnika (rys. 1.11a). Te czujniki
są zaprojektowane tak, aby wykrywać metalowe przedmioty przecho-
dzące przez otwór w czujniku. Z uwagi na swoją konstrukcję są przy-
stosowane zwłaszcza do wykrywania i zliczania małych przedmiotów
metalowych, takich jak: śruby, nakrętki, wkręty, lub inne małe elementy
metalowe przechodzące przez otwór pierścienia. Obudowy tych czuj-
ników są plastikowe.
Zasada pracy takiego czujnika oparta jest na oscylatorze wysokiej
częstotliwości, który wytwarza elektromagnetyczne pole wewnątrz
otworu czujnika. Stosuje się w nich rdzenie toroidalne proszkowe o
wyższym współczynniku dobroci od rdzeni ferrytowych. Obecność
przedmiotu metalowego aktywuje czujnik powodując spadek amplitudy
oscylacji. Jest to rozpoznawane przez komparator i po przekroczeniu
wartości progowej stan wyjścia jest przełączany. Strefa działania czuj-
nika zależy od średnicy otworu czujnika oraz wielkości i rodzaju wy-
krywanego metalu.
Do zainicjowania czujnika wymagany jest określony poziom tłumienia
pola magnetycznego. W przypadku zbyt małych przedmiotów poziom
wprowadzanego przez nie tłumienia może okazać się niewystarczają-
cy. Z tego powodu dla każdej wielkości czujnika istnieje minimalna
długość lub średnica wykrywanego przedmiotu, poniżej której czujnik
może nie działać poprawnie (rys. 1.11b).
Zaletą czujników pierścieniowych jest to, że nie wymagają by wykry-
wany przedmiot poruszał się dokładnie po tej samej trajektorii. Pier-
ścieniowa aktywna powierzchnia czujnika pozwala wykrywać przed-
mioty niezależnie od ich orientacji w przestrzeni, np. spadające grawi-
tacyjnie wewnątrz rurki plastikowej.
a)
b)
0
5
10
15
20
25
0
20
40
60
80
100
Średnica otworu czujnika [mm]
Mi
n
im
al
n
a
śr
ednic
a/
d
ługo
śc
pr
ze
dm
iot
u
[
m
m
]
średnica
długość
Rys. 1.11:
Czujnik indukcyjny pierścieniowy: a) widok, b) związek między wielkością czujnika
a minimalną wielkością wykrywanego przedmiotu
16
Komponenty mechatroniczne - Podręcznik
Minos
1.4.2
Czujniki pracujące w silnym polu elektromagnetycznym
Procesami, którym towarzyszą silne pola elektromagnetyczne są pro-
cesy spawalnicze, wymagające dużych prądów do ich realizacji. Prąd
ten, płynąc przez przewody elektryczne oraz oprzyrządowanie spa-
walnicze, wytwarza wokół nich zmienne pole magnetyczne o dużym
natężeniu.
Umieszczenie w tej strefie czujnika indukcyjnego wiąże się z ryzykiem
niekontrolowanego przełączania stanu wyjścia, w wyniku oddziaływa-
nia pola magnetycznego na stopień nasycenia rdzenia. Drugim nega-
tywnym efektem oddziaływania silnych pól magnetycznych jest indu-
kowanie się w cewce dodatkowego napięcia. To dodatkowe napięcie
zakłóca pracę oscylatora i może spowodować przypadkowe przełą-
czenie wyjścia czujnika. Ponadto procesowi spawania nieodłącznie
towarzyszą duże ilości iskier spawalniczych, które mogą uszkodzić
obudowę czujnika, a zwłaszcza jego aktywną powierzchnię.
Z tego powodu, czujniki przeznaczone do pracy w pobliżu urządzeń
spawalniczych, wykonane są zwykle z mosiądzu pokrytego teflonem, a
ich powierzchnia czołowa chroniona jest duroplastem, odpornym na
działanie wysokiej temperatury.
Czujniki takie, aby zapobiegać przypadkom fałszywych aktywacji, mu-
szą posiadać specjalną konstrukcję układu elektronicznego oraz rdzeń
o małej przenikalności magnetycznej (Rys.1.12). Rdzenie takie wyko-
nane ze specjalnego spieku żelaznego nasycają się dopiero w stru-
mieniu magnetycznym o gęstości kilka razy większej niż typowy rdzeń
ferrytowy. Powoduje to większą odporność czujnika na interferencję od
zewnętrznych pól magnetycznych, poprzez lepsze skupiania i odpo-
wiednie skierowanie własnego pola magnetycznego cewki.
Najwyższą odporność na działanie zewnętrznych pól magnetycznych
mają czujniki całkowicie pozbawione rdzenia, który w tradycyjnych
czujnikach koncentrował wokół siebie zewnętrzny magnetyzm. W ta-
kich rozwiązaniach cewki nawinięte są na niemagnetycznych szpulach
plastikowych.
Cewka
Szpula
plastikowa
Rdzeń o małej
przenikalności
Rys. 1.12:
Cewki czujników indukcyjnych odpornych na silne pola magnetyczne
17
Komponenty mechatroniczne - Podręcznik
Minos
18
1.4.3
Czujniki pracujące w trudnych warunkach
Stosowanie standardowych czujników w środowisku o niestandardo-
wych parametrach zawsze stwarza możliwość wystąpienia zakłóceń w
ich pracy, a nawet trwałego uszkodzenia.
Przystosowanie czujników do pracy w specyficznych warunkach wy-
maga zwykle zastosowania specjalnych materiałów na obudowy,
zwiększenia niektórych wymiarów, opracowania specjalnych technolo-
gii montażu czujników, zapewnienia poprawnych warunków pracy
układom elektronicznym przez ich zabezpieczenie lub zmianę kon-
strukcji.
Dostosowując się do potrzeb producenci czujników proponują między
innymi:
- czujniki odporne na temperatury do 200 st C,
- czujniki odporne chemicznie,
- czujniki odporne na olej,
- czujniki do pracy w wilgotnym środowisku,
- czujniki miniaturowe o głowicach od 3-5mm.
Czujniki pracujące np. w warunkach dużych ciśnień muszą posiadać
wytrzymałą i szczelną obudowę, aby zapobiec uszkodzeniom we-
wnętrznych elementów elektronicznych. Od czoła cewka i rdzeń są
chronione grubą tarczą ceramiczną, odporną na zużycie. Wymuszone
konstrukcją odsunięcie cewki od czoła czujnika skutkuje jednak
zmniejszeniem zakresu jego działania. Aby temu zapobiec niezbędne
jest dokonanie odpowiednich modyfikacji układu oscylatora. Oscylator
taki pozwalałby w normalnych warunkach uzyskiwać zakres działania
znacznie większy niż w czujnikach standardowych.
Dobrą szczelność czujnika uzyskuje się poprzez cieplne połączenie
ceramicznego czoła czujnika z metalową obudową ze stali nierdzew-
nej. Podgrzana obudowa jest nasadzana na tarczę ceramiczną i sty-
gnąc zaciska się wokół niej, tworząc wytrzymałe i szczelne połączenie.
Komponenty mechatroniczne - Podręcznik
Minos
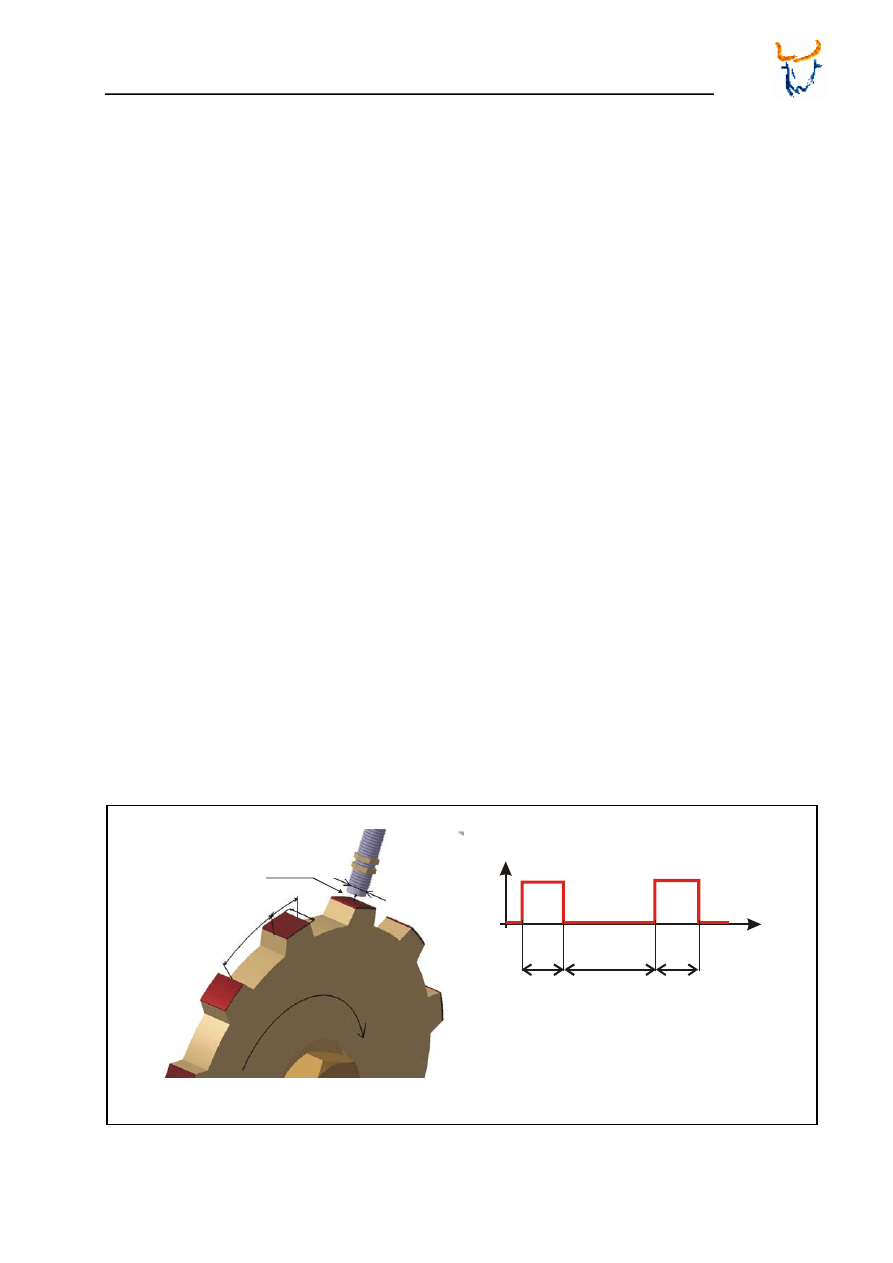
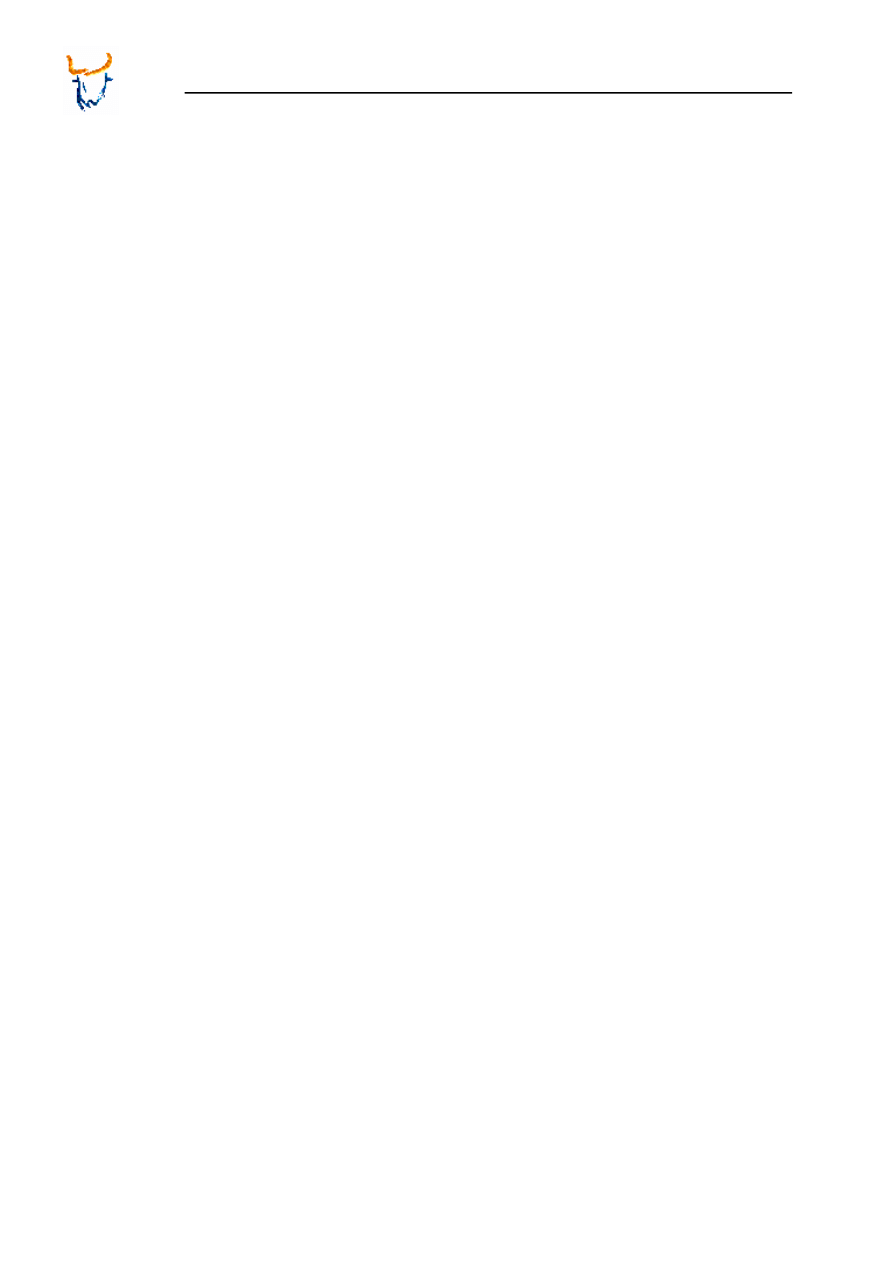
1.5
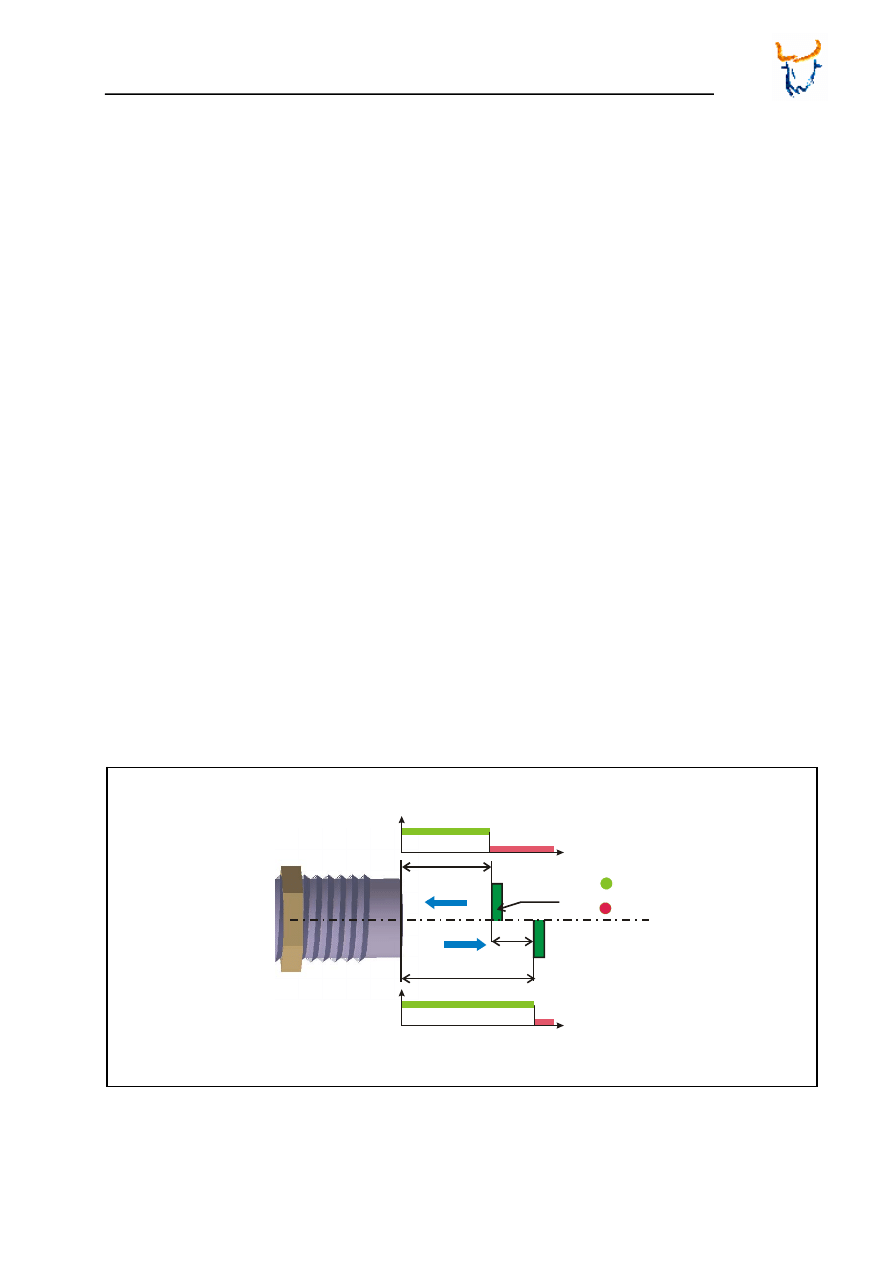
Rozpoznawanie kierunku ruchu
Współpracująca para czujników indukcyjnych może posłużyć do de-
tekcji kierunku ruchu obrotowego lub liniowego. W przypadku ruchu
obrotowego, elementem wymuszającym przełączenie stanu wyjścia
czujnika może być np. koło zębate (rys. 1.13).
Sygnały z czujników indukcyjnych podawane są na układ dyskrymina-
tora fazy (układu wyznaczającego przesunięcie fazowe pomiędzy
przebiegiem 1 i 2). W przypadku ruchu w lewo sygnał 1 poprzedza sy-
gnał 2 na osi czasu i wówczas ustawiane jest wyjście L. Wyjście to sy-
gnalizuje ruch w lewo. Przy ruchu w prawo występuje sytuacja odwrot-
na tj. sygnał 2 poprzedza sygnał 1 i wówczas w dyskryminatorze usta-
wiane jest wyjście R, co oznacza ruch w prawo.
Podobnie realizowane jest wyznaczenie kierunku ruchu liniowego z
pomocą pierścieniowego czujnika bistabilnego. Czujnik ten zawiera
dwie cewki umieszczone obok siebie, zasilane z dwóch niezależnych
generatorów. Konstrukcja czujnika zapewnia zróżnicowanie prądów
płynących przez cewkę pierwszą i drugą.
W danym momencie czasowym może pracować tylko jeden z genera-
torów. Jeżeli przedmiot zbliża się z lewej strony ku prawej to najpierw
tłumieniu ulegnie obwód cewki pierwszej, a następnie drugiej. W przy-
padku ruchu w kierunku odwrotnym, sytuacja ulega odwróceniu. Anali-
zując wartości prądów płynących przez cewki układ pomiarowy roz-
różnia kierunek ruchu obiektu.
U
1
t
U
2
t
t
t
U
1
U
2
Rys. 1.13:
Rozpoznawanie kierunku ruchu dwoma czujnikami standardowymi i czujnikiem
bistabilnym
19
Komponenty mechatroniczne - Podręcznik
Minos
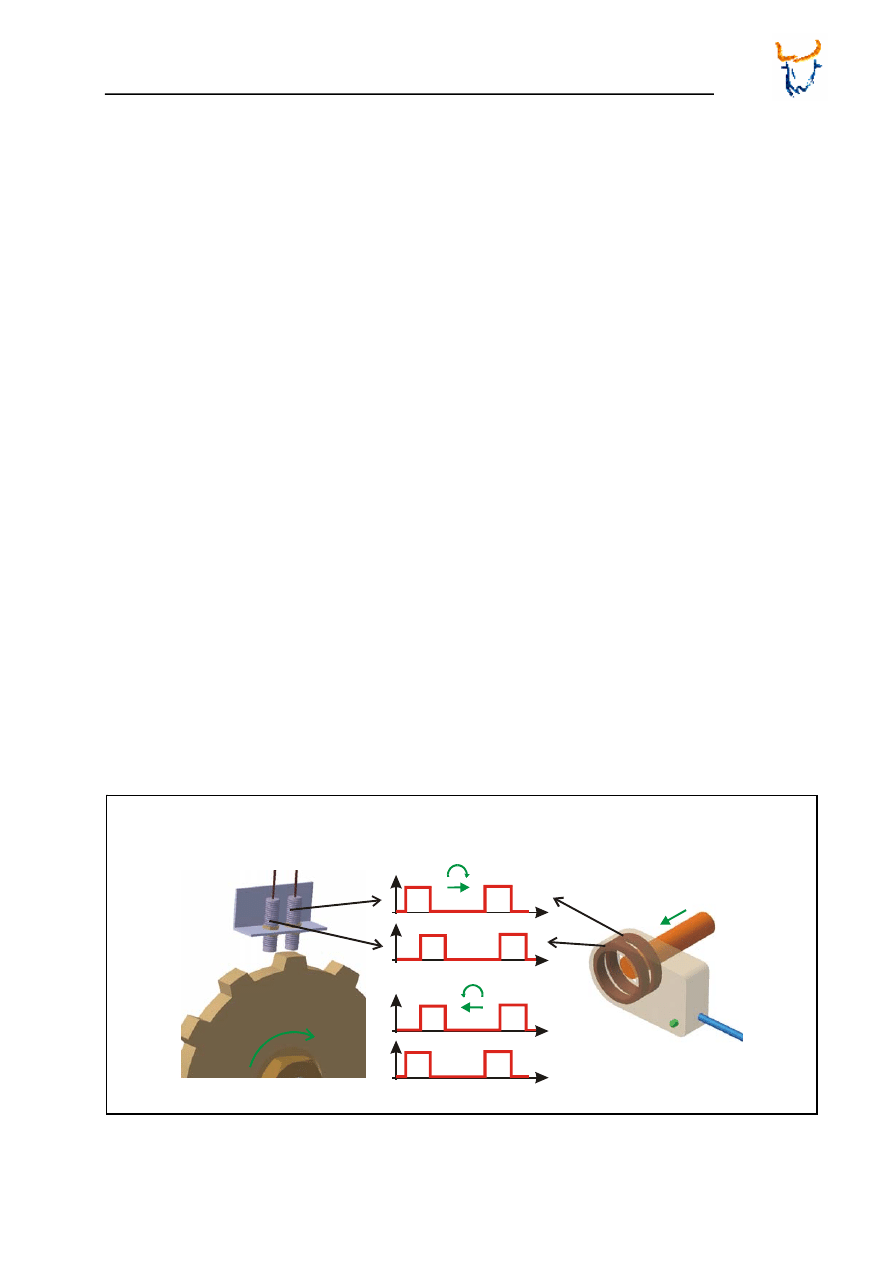
1.6
Czujniki NAMUR
Czujniki indukcyjne NAMUR są 2-przewodowymi czujnikami, których
wewnętrzna rezystancja zmienia się w wyniku wykrycia metalu. Mała
rezystancja czujnika odpowiada sytuacji – „brak przedmiotu metalowe-
go”, a duża rezystancja – „przedmiot metalowy wykryty”. Czujniki te
współpracują z zewnętrznymi wzmacniaczami.
Czujniki NAMUR charakteryzują się ściśle określonym obszarem do-
puszczalnym prądu wyjściowego, wynoszącym zgodnie z normą EN
60947-5-6 (dawniej EN 50227) od 1,2 do 2,1 mA (rys. 1.14). Wszystkie
czujniki NAMUR, zasilane ze wzmacniacza prądu stałego, maja taką
samą charakterystykę prądową i cechują się ściśle określoną histerezą
przełączania równa 0,2mA.
Składają się one z oscylatora mającego wytłumioną cewkę oraz de-
modulatora. Zmiana odległości między przedmiotem wykrywanym a
czujnikiem przetwarzana jest na zmianę pobieranego prądu, którą
wzmacniacz zewnętrzny zamienia na sygnał dwustanowy.
Czujniki NAMUR mogą pracować w instalacjach przeciwwybuchowych
lub w strefach zagrożonych wybuchem (strefa I lub II), tylko w połą-
czeniu z iskrobezpiecznym wzmacniaczem przełączającym. Możliwa
jest też współpraca tych czujników ze wzmacniaczami niespełniający-
mi norm bezpieczeństwa (wzmacniacze przekaźnikowe), lecz wów-
czas wzmacniacz musi być umieszczony poza strefą zagrożoną wybu-
chem.
Prąd w obwodzie czujnika mniejszy od 0,15mA traktowany jest przez
wzmacniacz zewnętrzny jako brak sygnału, a prąd większy od 6mA
jako zwarcie w czujniku.
a)
b)
+
_
1
2
3
4
5
2,1mA
1,2mA
I<=6mA - maksymalny prąd
P
rą
d [
m
A
]
S [mm]
L
1
L
2
Obszar
dopuszczalny
Brak
tłumienia
Tłumienie Rozłączenie
Rys. 1.14:
Czujnik typu NAMUR a) charakterystyka, b) obwód elektryczny
20
Komponenty mechatroniczne - Podręcznik
Minos
1.7
Analogowe czujniki indukcyjne
Inaczej niż w konwencjonalnych czujnikach, w których rejestrowane są
tylko stany wykrycia przedmiotu lub jego nie wykrycia, indukcyjne
czujniki z wyjściem analogowym rejestrują położenie przedmiotu w ca-
łym zakresie pomiarowym czujnika. Zmianie położenia przedmiotu z
odległości równej S
n
do zera, odpowiada zmiana sygnału wyjściowego
od 0 do 20 mA.
Czujniki z wyjściem analogowym działają w podobny sposób jak czuj-
niki zbliżeniowe. Zmienne pole magnetyczne emitowane przez układ
rezonansowy jest tłumione przez metalowy przedmiot znajdujący się w
polu działania czujnika. Tłumienie to staje się silniejsze w miarę zbli-
żania się przedmiotu do czoła czujnika.
Specjalnie zaprojektowany oscylator pozwala tłumić obwód rezonan-
sowy wraz ze zmianą odległości, czyli ze zmianą współczynnika do-
broci. Przetworzone zostaje to na sygnał wyjściowy, który dzięki ukła-
dowi linearyzacji jest w przybliżeniu liniowy (rys. 1.15). Krzywe i liczby
na wykresie oparte są na przedmiocie ze stali St37, ponieważ ta stal
daje największy zasięg wykrywania. Dla metali o innej przenikalności
magnetycznej należy posłużyć się właściwymi dla nich współczynni-
kami korekcyjnymi.
Większość obecnie dostępnych czujników ma praktycznie liniową cha-
rakterystykę w całym zakresie pomiarowym (obszar zaznaczony na ry-
sunku).
UKŁAD
WYJŚCIOWY
UKŁAD
LINEARYZACJI
UKŁAD
GENERATORA
GŁOWICA
CZUJNIKA
L
C
I = 0-20mA
A
St 37
Al
Pr
ą
d [m
A]
S [mm]
0
1
2
3
5
6
4
Rys 1.15:
Analogowy czujnik z wyjściem indukcyjnym
21
Komponenty mechatroniczne - Podręcznik
Minos
1.8
Zasilanie prądem stałym
Czujniki zasilane prądem stałym współpracują najczęściej z zasila-
czami, których napięcie wyjściowe jest napięciem tętniącym. Zbyt duże
wahania amplitudy chwilowych wartości tego napięcia mogą spowo-
dować nieprzewidywalne zachowanie czujnika indukcyjnego.
Dla zapewnienia prawidłowej pracy, wahania napięcia zasilającego
muszą być utrzymane w zakresie nieprzekraczającym 10% średniej
wartości napięcia zasilania (rys. 1.16a). Spełniony musi być zatem wa-
runek:
U
ss
≤ 0.1U
D
Podany zakres nie może zostać przekroczony nawet przez chwilowy
skok napięcia U
ss
. W celu uniknięcia tego zjawiska zalecane jest sto-
sowanie zasilacza stabilizowanego lub większego kondensatora wy-
gładzającego napięcie.
Wyjścia czujników zasilanych prądem stałym wykonywane są w konfi-
guracji NPN lub PNP. Dla konfiguracji NPN oznacza to, że obciążenie
R
L
włączane jest pomiędzy wyjściem czujnika a plus (+) zasilania U, a
dla PNP pomiędzy wyjściem a minus (-) zasilania U. Każde z tych
dwóch typów wyjść wykonywane jest z funkcją wyjściową NO (normal-
nie otwarty) lub funkcją NC (normalnie zamknięty). Część czujników
wykonywana jest także z funkcją wyjściową NP (komplementarną), o
dwóch niezależnych wyjściach NO i NC. Sposób przyłączenia obcią-
żenia tych czujników pokazano na Rys. 1.16b.
a)
b)
U
ss
t
U
D
U
U <= 0.1U
ss
śr
PNP
R
L
-
+
NPN
R
L
-
+
Rys. 1.16:
Zasilanie czujników indukcyjnych prądem stałym a) napięcie zasilania, b) przyłą-
czanie obciążenia R
L
do czujnika
22
Komponenty mechatroniczne - Podręcznik
Minos
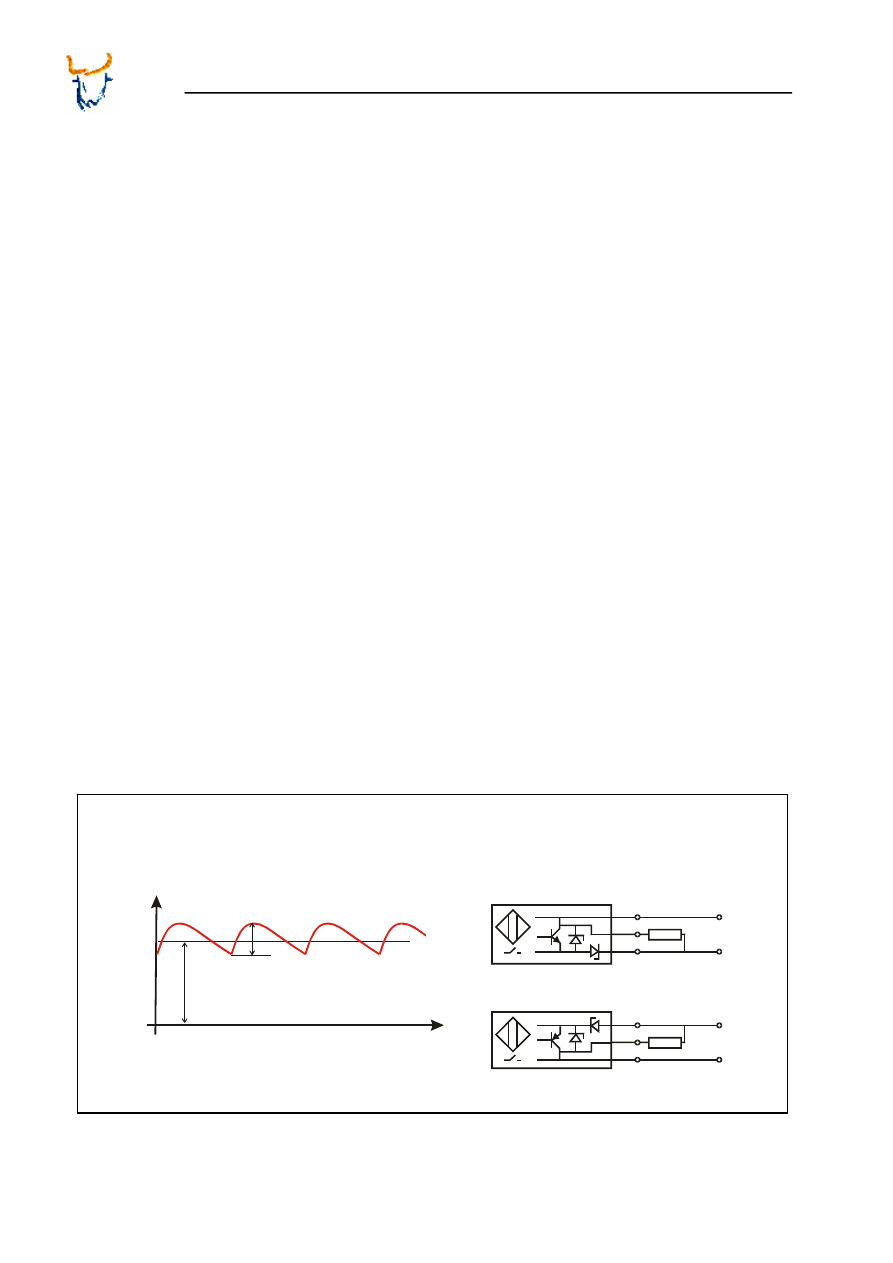
1.9
Zasilanie prądem przemiennym (AC)
Czujniki indukcyjne w wersji AC nie mogą być podłączane bezpośred-
nio do zasilacza prądu zmiennego (rys. 1.17). Takie podłączenie może
spowodować zniszczenie wewnętrznych układów elektronicznych czuj-
nika.
W przypadku czujników zasilanych prądem przemiennym, łączy się je
szeregowo z obciążeniem R
L
. Typowy układ pracy takiego czujnika
przedstawia rys. 1.17. Stosowanie czujników dwuprzewodowych, zasi-
lanych prądem przemiennym wiąże się z wystąpieniem dodatkowych
wymagań i ograniczeń stawianych zewnętrznym obwodom elektrycz-
nym.
Oprócz oscylatora, 2-przewodowe czujniki prądu zmiennego posiadają
tranzystor jako wzmacniacz mocy. Te czujniki są bezpośrednio połą-
czone w szereg z obciążeniem. Efektem tego jest pozostanie w obwo-
dzie pewnego prądu (prądu upływu), mimo że czujnik znajduje się w
stanie rozłączonym. Wymusza to również pewien spadek napięcia za-
silania czujnika. Zjawiska te są szczególnie istotne przy szeregowym i
równoległym łączeniu tych czujników.
Dobierając warunki zasilania czujników prądu zmiennego należy bez-
względnie przestrzegać, podawanych przez ich producentów, wartości
prądu obciążenia, zarówno maksymalnego jak i minimalnego.
NIEPRAWIDŁOWO
PRAWIDŁOWO
R
L
Rys.1.17: Zasilanie
czujników
napięciem przemiennym
23
Komponenty mechatroniczne - Podręcznik
Minos
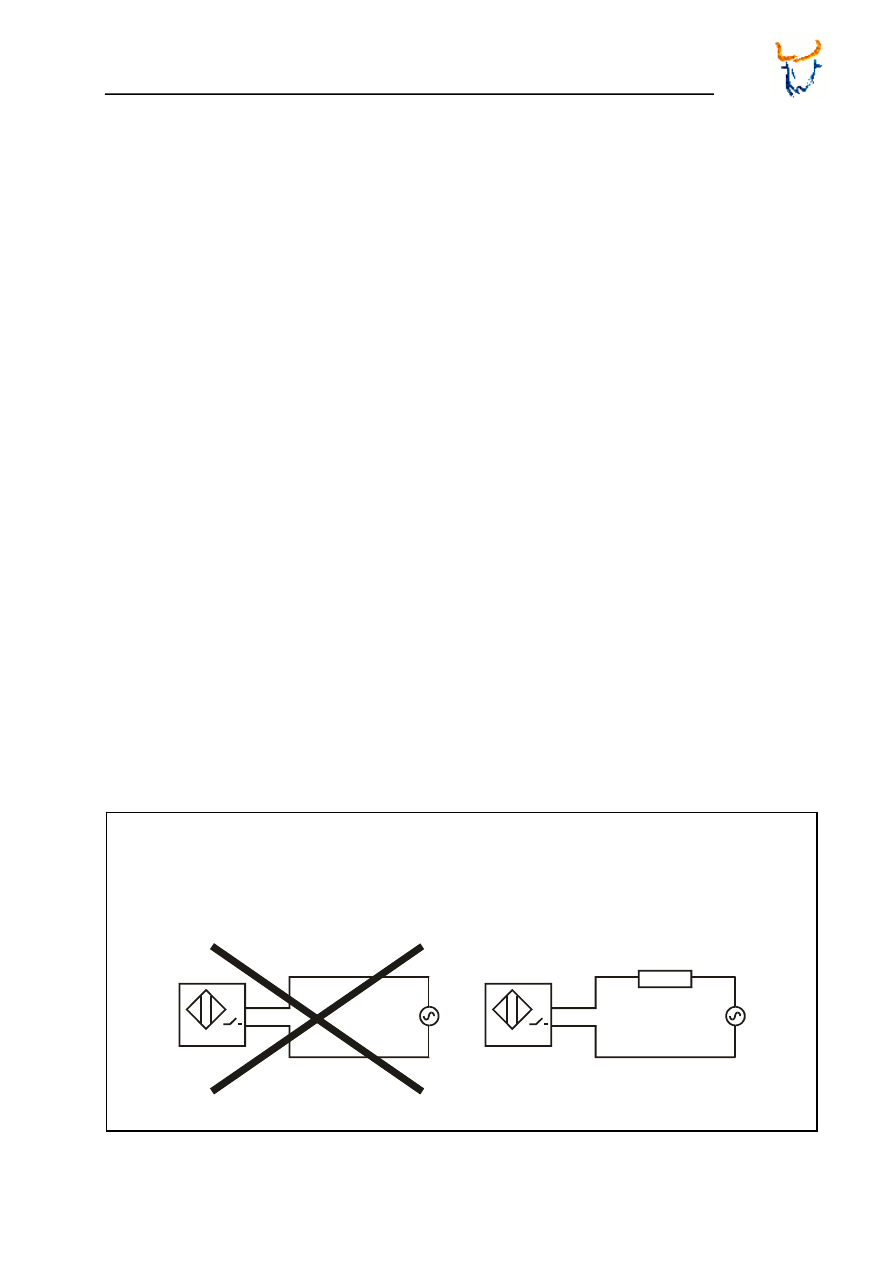
1.10
Zasady łączenia czujników
Szeregowe lub równolegle łączenie kilku czujników stwarza możliwość
realizacji różnych strategii funkcjonowania urządzeń, które mogą być
włączone w obwodzie zewnętrznym jako obciążenie (Rys.1.18). W
wyniku odpowiedniego łączenia czujników mogą być realizowane
funkcje logiczne, takie jak AND, OR lub NOR.
Funkcja logiczna AND gwarantuje, że sygnał wyjściowy z grupy czujni-
ków pojawi się tylko wtedy, gdy każdy czujnik w grupie zmieni stan
swojego wyjścia z OFF na ON.
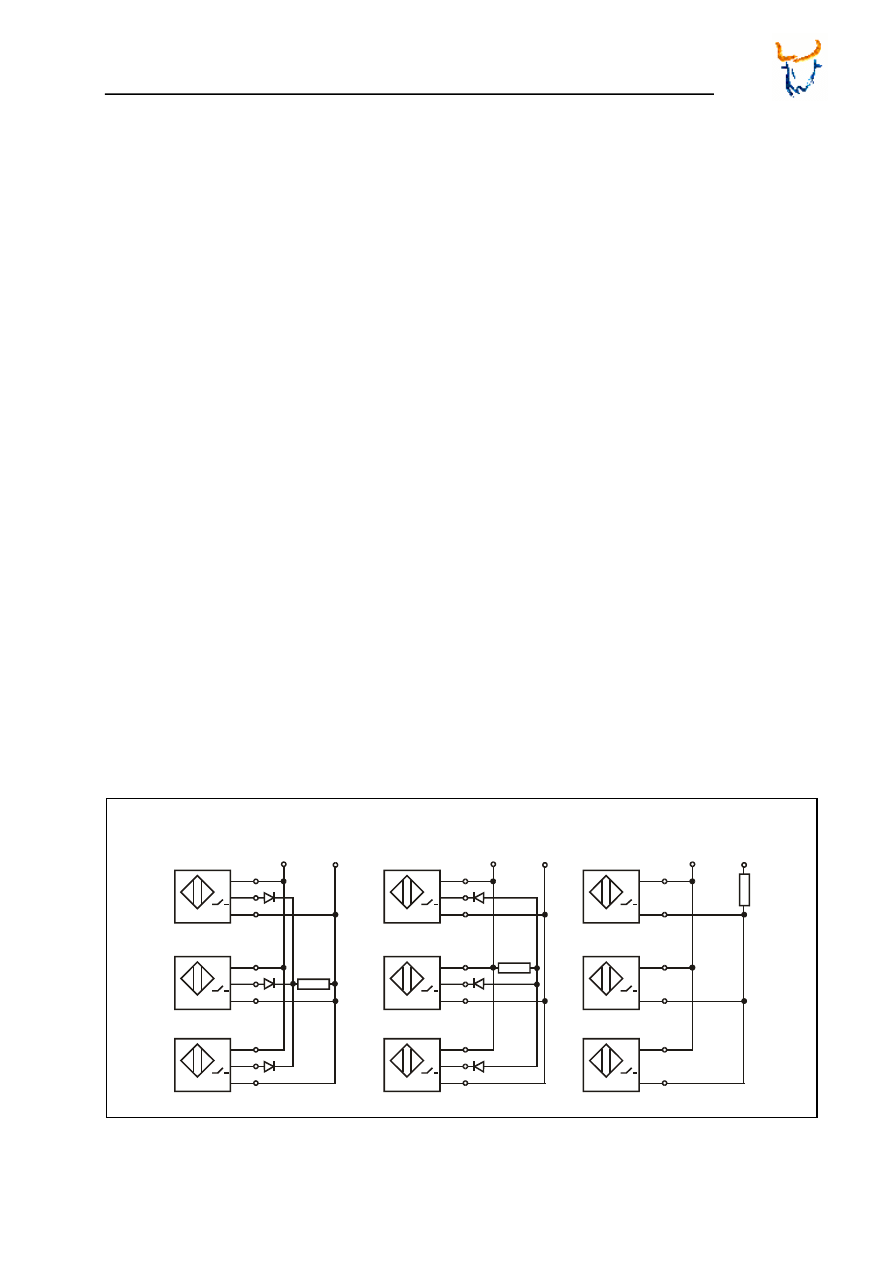
Funkcja NOR powoduje przerwanie obwodu zasilającego obciążenie
R
L
, które nastąpi tylko wtedy, gdy wszystkie czujniki w grupie zmienią
swój stan z ON na OFF.
Grupy czujników o różnych funkcjach wyjściowych mogą być łączone
szeregowo w celu realizacji innych zależności logicznych.
Maksymalna liczba połączonych szeregowo czujników zależy od wiel-
kości napięcia zasilania, spadków napięć na wyjściu czujników i para-
metrów dołączonego obciążenia. Napięcie zasilania układu, pomniej-
szone o sumę spadków napięć na wyjściu czujników, musi być zawsze
wyższe od minimalnego napięcia pracy przy dołączonym obciążeniu.
R
L
N
+/-
(+)
R
L
-
+
-
+
-
+
-
+
(+)
(+)
DC/AC
DC
Rys 1.18:
Łączenie szeregowe czujników w grupy (funkcja logiczna AND)
24
Komponenty mechatroniczne - Podręcznik
Minos
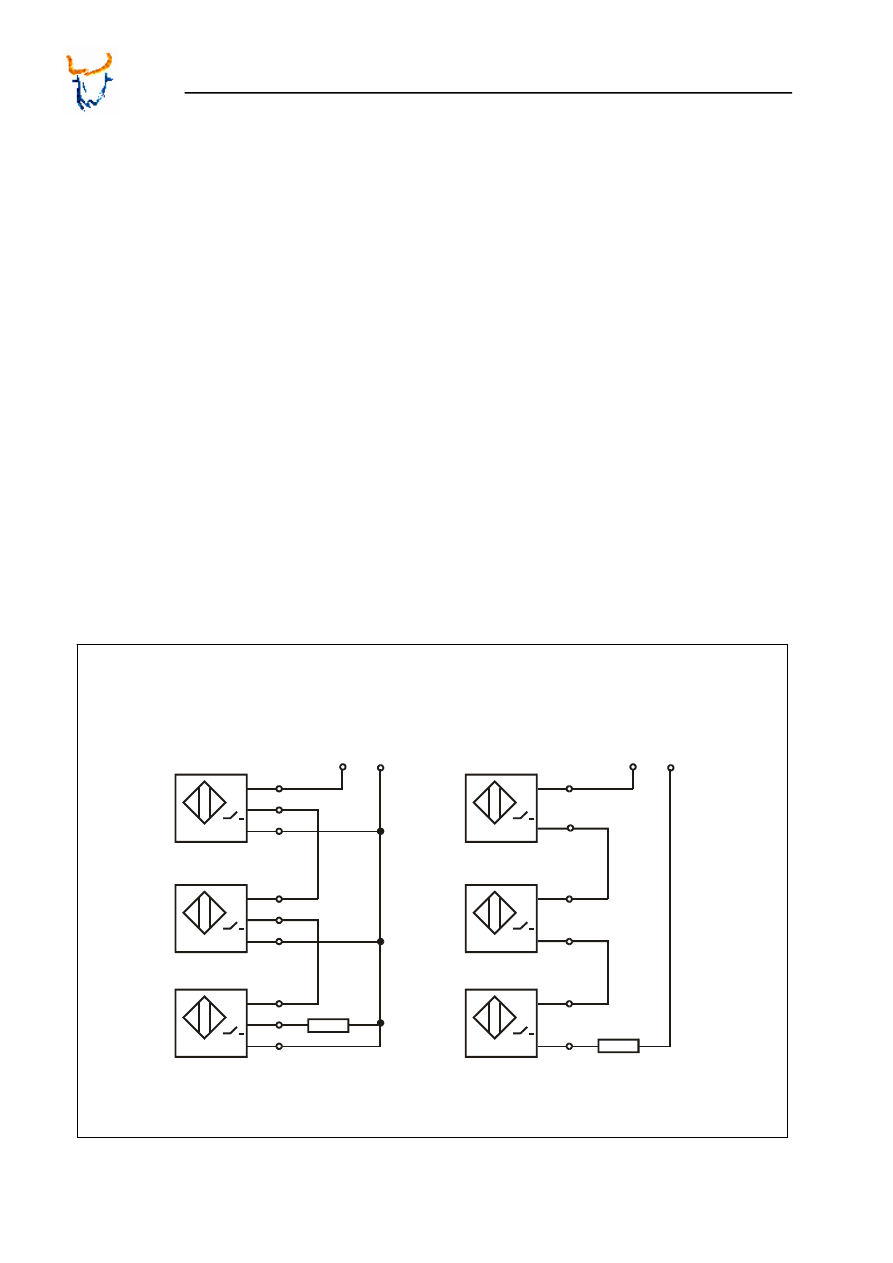
Funkcja OR powoduje pojawienie się sygnału wyjściowego, gdy cho-
ciaż jeden czujnik w grupie zmieni stan swojego wyjścia. Realizują ją
grupy czujników połączone równolegle (Rys.1.19).
Dla równolegle połączonych czujników trójprzewodowych zasilanych
prądem stałym nie ma istotnych ograniczeń ilościowych. Można rów-
nolegle łączyć wyjścia nawet kilkunastu czujników, niezależnie od typu
funkcji wyjściowej.
W przypadku połączenia równoległego czujników dwuprzewodowych,
prądy upływu wszystkich czujników w grupie mogą się sumować, co
niekorzystnie wpływa na poprawność pracy układu.
Z tego względu raczej nie zaleca się równoległego łączenia czujników
dwuprzewodowych, chociaż nie wyklucza się takiej możliwości. Mak-
symalna ich liczba w grupie zależy od rodzaju obciążenia oraz sumy
prądów upływu płynących przez obwód wyjściowy czujników.
R
L
-
+
-
+
-
+
-
+
R
L
-
+
-
+
-
+
-
+
DC
AC
DC
R
L
Rys 1.19:
Łączenie równoległe czujników w grupy (funkcja logiczna OR)
25
Komponenty mechatroniczne - Podręcznik
Minos
1.11
Zabezpieczenia i bezpieczeństwo czujników
Jedną z ważniejszych cech czujników jest możliwość zabezpieczania
się przed błędami instalacyjnymi i awariami podczas eksploatacji. Słu-
żą do tego elementy zabezpieczeń elektrycznych, chroniących układy
wewnętrzne czujnika. W większości czujników stałoprądowych wyjścia
zabezpieczone są przed skutkami następujących niepożądanych zja-
wisk lub działań:
- odwrotnego podłączenia napięcia zasilania,
- przepięć na wyjściu, powstających przy wyłączaniu obciążeń,
- wystąpieniem krótkich i niecyklicznych impulsów od strony zasilania,
- przekroczenia dopuszczalnego prądu wyjściowego lub zwarcia.
Zwarcia w obwodzie elektrycznym z czujnikami stałoprądowymi nie
powodują uszkodzenia czujnika. Mogą one występować wielokrotnie i
przez dłuższy okres czasu. Podczas zwarcia nie działają diody w czuj-
niku, a po jego usunięciu czujnik pracuje poprawnie.
Czujniki w obudowach metalowych, jeśli są zasilane napięciami nie-
bezpiecznymi dla zdrowia człowieka, wymagają dodatkowego przewo-
du uziemiającego.
Kiedy czujnik zbliżeniowy jest w stanie niewłączonym (OFF), w obwo-
dzie pojawia się prąd upływu (Rys.1.20). Może to spowodować jego
nieprawidłową pracę czujnika, np. trwałe pozostawanie w stanie OFF.
Aby zapobiec takim zjawiskom stosuje się dodatkowy rezystor R
P
,
włączony równolegle do obciążenia. Odprowadza on prąd upływu tak,
aby prąd płynący przez obciążenie był mniejszy niż minimalna wartość
prądu wymagana przez obciążenie. Wartość rezystancji R
P
i moc P te-
go rezystora można wyznaczyć z zależności:
R
P
=U/I
min
P=U
2
/R
P
Napięcie zasilania [V]
Pr
ą
d u
pł
yw
u [
m
A]
1.0
1.5
0
0.5
100
200
R
P
R
L
Rys 1.20:
Prąd upływu w obwodzie z czujnikiem indukcyjnym zasilanym prądem przemien-
nym
26
Komponenty mechatroniczne - Podręcznik
Minos
1.12 Podłączanie czujników do sieci komunikacyjnych
Sieci komunikacyjne są najnowocześniejszym rozwiązaniem komuni-
kacji między czujnikami a urządzeniami sterującymi. Zastępują one do-
tychczas stosowane rozwiązania klasyczne, charakteryzujące się dużą
liczbą przewodów, prowadzonych często na znaczne odległości do
układów sterujących.
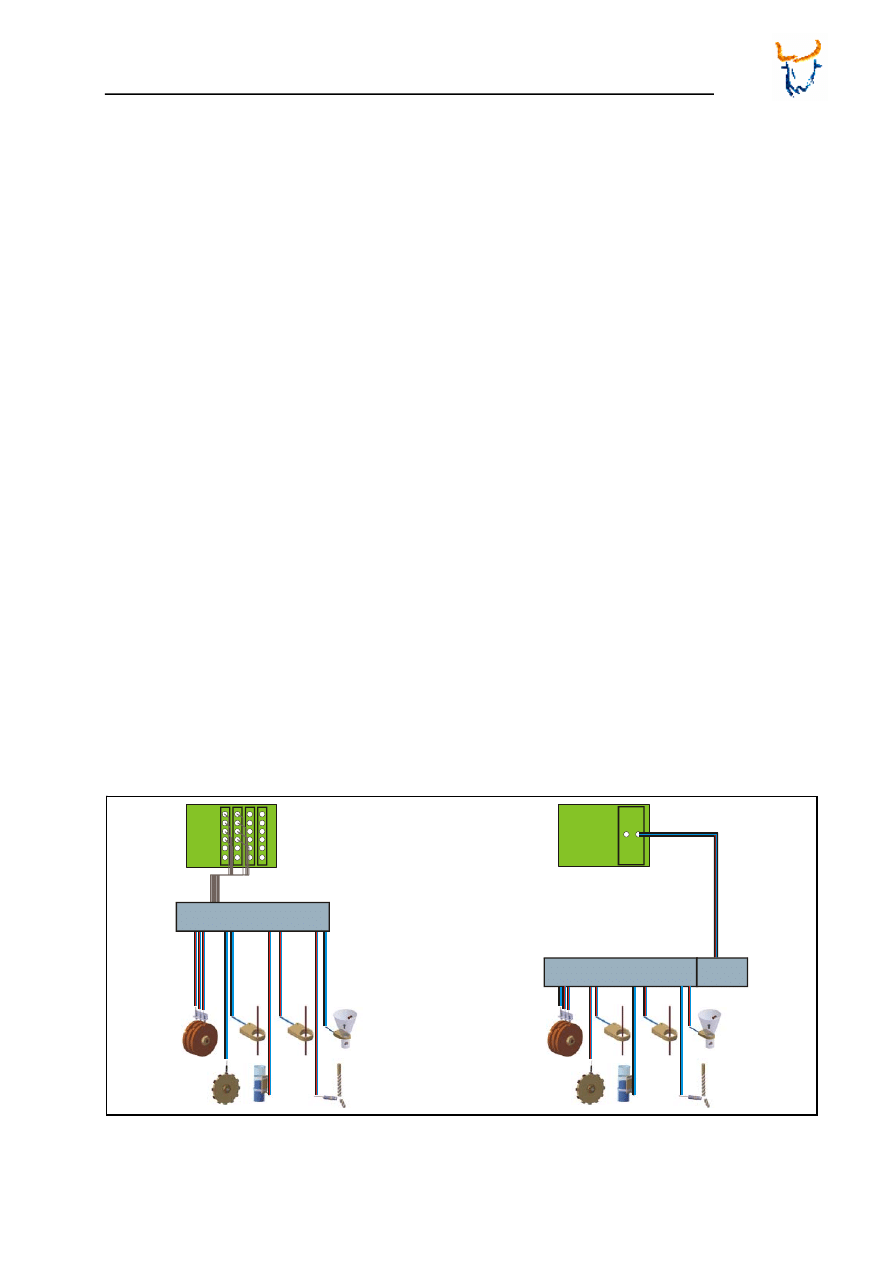
Koncepcja zastosowania rozwiązań sieciowych polega na zbieraniu
sygnałów przez urządzenia pośrednie, stanowiące węzły sieci i przesy-
łaniu ich przy użyciu magistrali do jednostki nadrzędnej (Rys.1.21).
Pozwala to:
- znacznie obniżyć koszty,
- zwiększyć odległość między czujnikiem i sterownikiem,
- przesyłać dane dotyczące kalibracji i charakterystyki czujnika.
Największą popularnością cieszą się sieci otwarte, czyli takie, które
pozwalają na wymianę informacji między urządzeniami różnych do-
stawców według standaryzowanych zasad. Najczęściej wykorzystywa-
ne standardy przemysłowe (protokoły komunikacji) to: Ethernet, Profi-
bus, DeviceNet, Modbus, CAN, AS-I.
Dzięki sieciom powstają rozproszone systemy sterowania, pozwalają-
ce przenieść część procesu przetwarzania sygnałów na niższe pozio-
my sytemu, czyli bliżej procesu.
Podstawowymi urządzeniami sieciowymi są moduły wejść/wyjść (I/O)
wyposażone w interfejsy do określonych typów sieci. Moduł jest wi-
dziany przez jednostkę nadrzędną pod jednym adresem sieciowym i
pozwala na transmisję danych z dużą prędkością. Jest to szczególnie
istotne dla sieci na poziomie urządzeń i czujników, gdzie realizowane
jest często złożone przetwarzanie sygnałów, a czasy podejmowania
decyzji muszą być krótkie.
Analogowe
i cyfrowe
moduły I/O
PLC
Kabel
wieloprzewodowy
Skrzynka
przyłączeniowa
Kabel
3-przewodowy:
zasilanie,
sygnał,
GND
Skrzynka
przyłączeniowa
Kabel
2-przewodowy
Karta AS-I
PLC
AS- I
Rys 1.21:
Uproszczona struktura systemu komunikacji bez sieci i z siecią
27
Komponenty mechatroniczne - Podręcznik
Minos
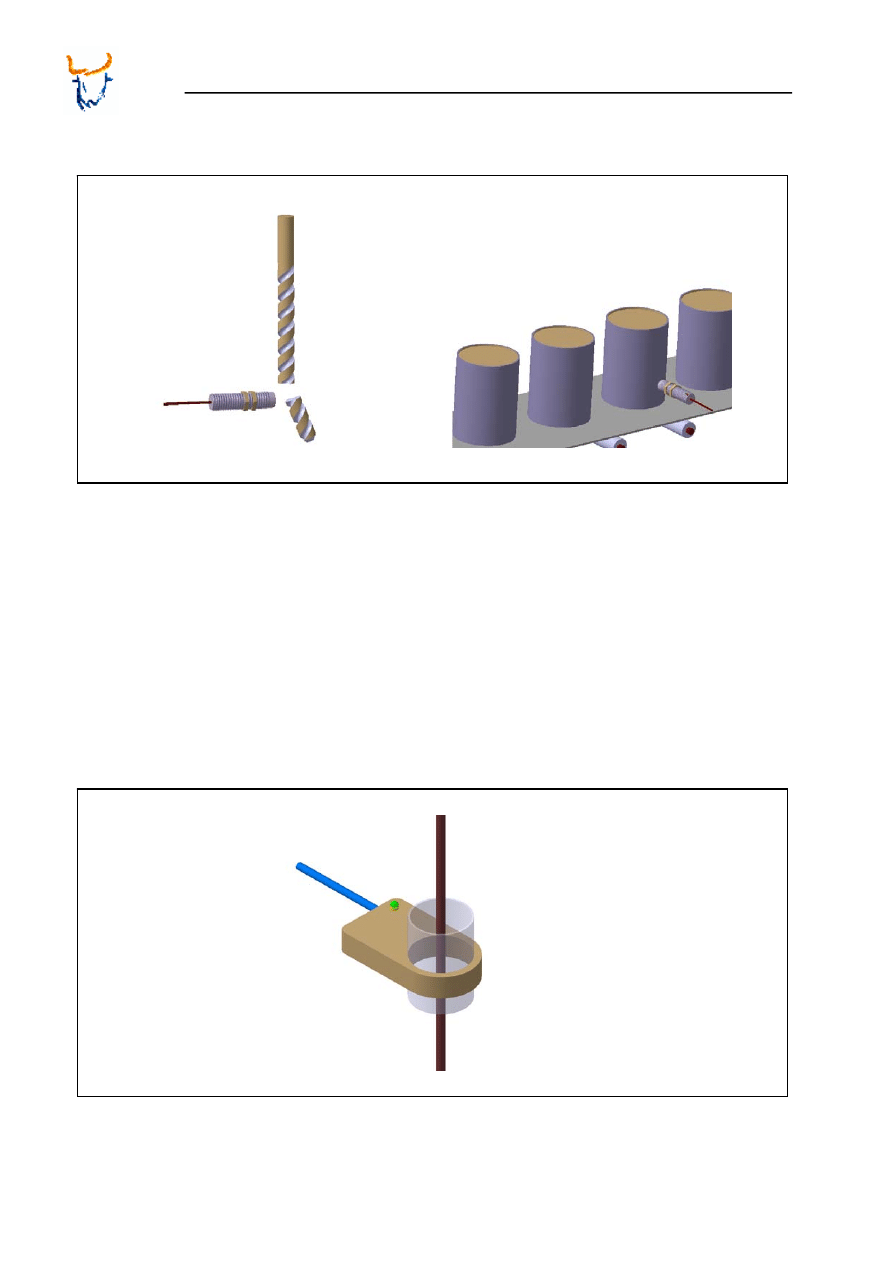
1.13 Aplikacje
Rys. 1.22:
Wykrywanie złamania wiertła i obiektów na taśmie
Rys. 1.23:
Kontrola ciągłości drutu
28
Komponenty mechatroniczne - Podręcznik
Minos
2.
Czujniki pojemnościowe
2.1
Informacje podstawowe
Czujniki pojemnościowe wykorzystują pole elektryczne do wykrywania
obiektów znajdujących się w zasięgu ich działania. W odróżnieniu od
czujników indukcyjnych mogą one, oprócz obiektów metalowych wy-
krywać, obiekty nieprzewodzące np. tworzywa sztuczne. Czujnik po-
jemnościowy jest także w stanie reagować na obiekty znajdujące się
za nieprzewodzącą warstwą, co czyni go klasycznym czujnikiem do
wykrywania obecności płynów czy granulatu poprzez ścianki pojemni-
ka. Są one używane zazwyczaj jako czujniki zbliżeniowe, choć mogą
generować również sygnał proporcjonalny do odległości przedmiotu od
czoła czujnika. Odległość działania tych czujników jest stosunkowo
mała, w zakresie do 30mm, chociaż zdarzają się one w wykonaniu
specjalnym do 60mm.
Reagują one przełączeniem stanu wyjścia ON/OFF lub OFF/ON wów-
czas, gdy w polu elektrycznym czujnika, wystarczająco blisko jego czo-
ła, pojawi się przedmiot metalowy lub dielektryk.
Głównymi składnikami czujnika pojemnościowego są: głowica z elek-
trodami, potencjometr P, oscylator, układ detekcji i układ wyjściowy
(rys. 2.1).
Aktywnymi elementami czujnika pojemnościowego są dwie metalowe
elektrody, tworzące kondensator otwarty. Gdy obiekt zbliża się do
czujnika to jego pojemność zmienia się. Całkowita pojemność konden-
satora, od której zależy poziom sygnału wyjściowego, jest sumą pod-
stawowej pojemności czujnika i zmiany pojemności, spowodowanej
działaniem obiektu wykrywanego.
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
OSCYLATORA
GŁOWICA
CZUJNIKA
S
OBIEKT
ELEKTRODY
CZUJNIKA
P
Rys. 2.1:
Schemat blokowy czujnika pojemnościowego
29
Komponenty mechatroniczne - Podręcznik
Minos
2.2
Podstawy teoretyczne
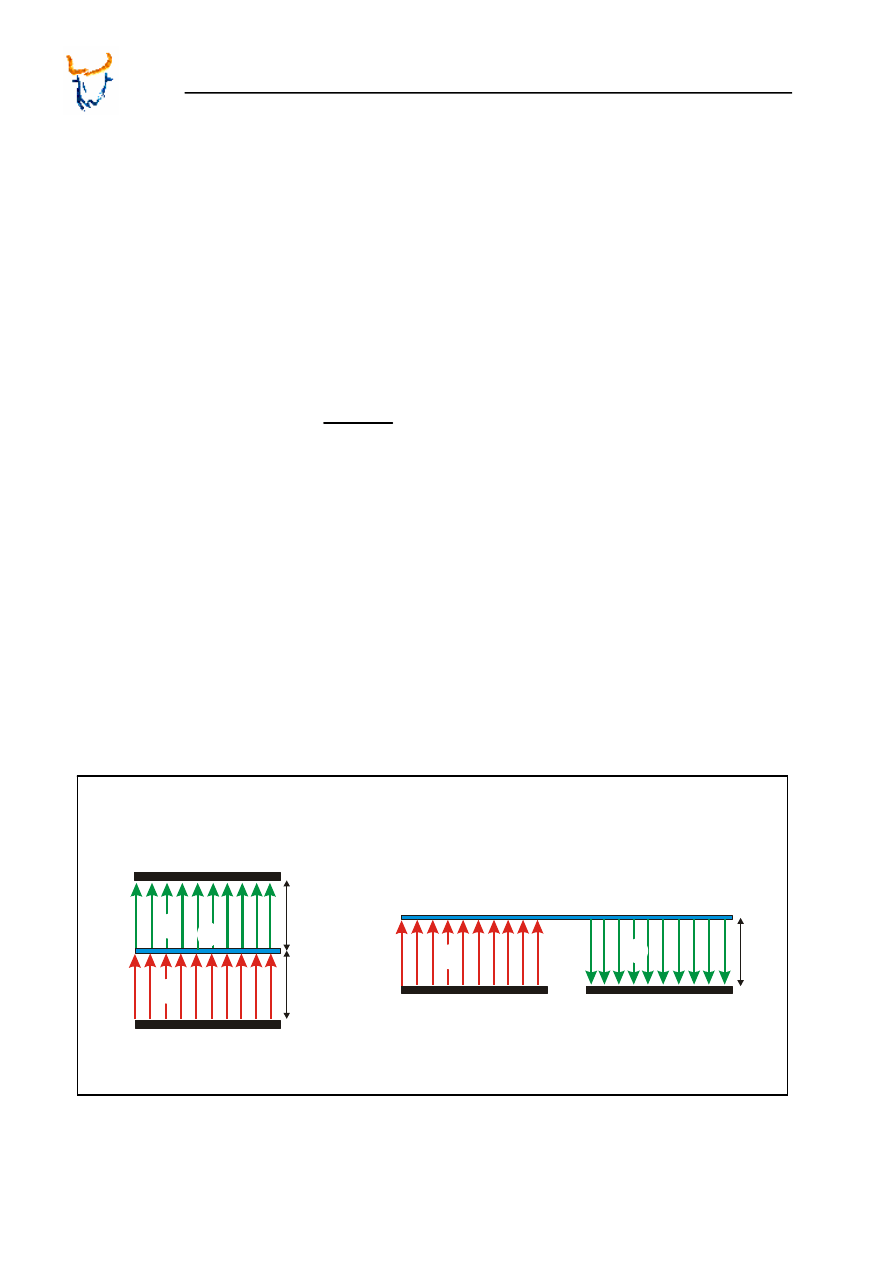
Kondensator w podstawowej swojej formie ma dwie elektrody A i B,
umieszczone na przeciw siebie (rys.2.2a). Kondensator otwarty uzy-
skuje się umieszczając te elektrody w jednej płaszczyźnie (rys.2.2b).
Wprowadzając dodatkową elektrodę pośrednią C o grubości Æ0, po-
między elektrody A i B, można otrzymać dwa kondensatory połączone
szeregowo. Podobnie jest w kondensatorze otwartym, w którym elek-
troda pośrednia dzieli pole elektryczne na dwa pola skierowane prze-
ciwnie. Pojemności tych kondensatorów są takie same i można je opi-
sać wzorem:
d
S
C
o
r
ε
ε
=
gdzie:
C - pojemność kondensatora,
S - powierzchnia elektrod,
ε
o
- stała elektryczna (dla próżni lub powietrza),
ε
r
– stała dielektryczna materiału wypełniającego kondensator,
d – odległość pomiędzy elektrodami.
B
0
U
U/2
d/2
A
d/2
B
0
U
U/2
A
d/2
C
a)
b)
C
ε
0
ε
0
ε
0
ε
0
Rys. 2.2:
Układ elektrod w kondensatorze: a) kondensator z elektrodami A i B umieszczo-
nymi naprzeciw siebie, b) kondensator otwarty z elektrodami A i B położonymi w
jednej płaszczyźnie
30
Komponenty mechatroniczne - Podręcznik
Minos
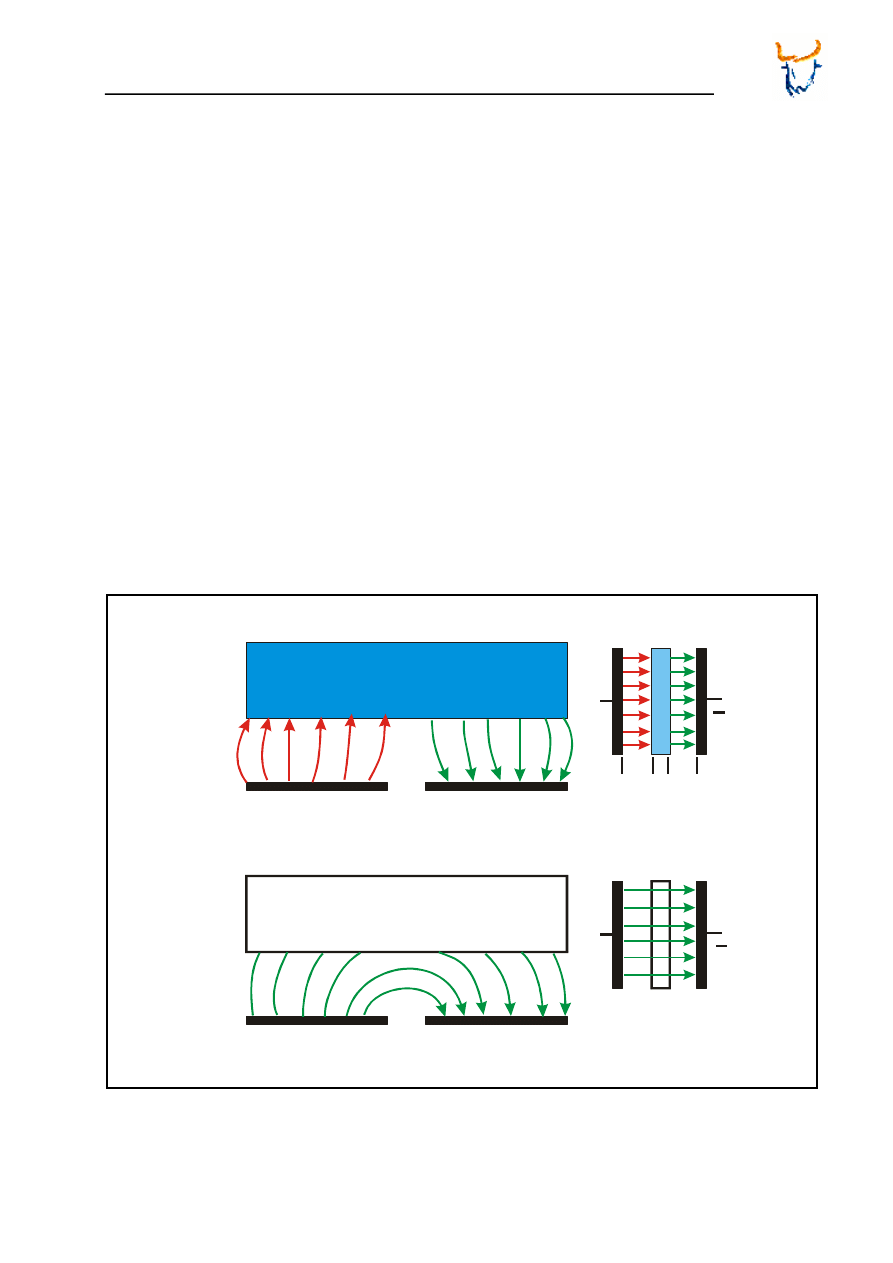
Obiekt przewodzący, umieszczony w polu elektrostatycznym konden-
satora otwartego, staje się sam elektrodą pośrednią C, a pojemność
takiego układu jest zawsze większa od pojemności kondensatora bez
elektrody pośredniej (rys. 2.3a).
Obiekty nieprzewodzące (izolatory) umieszczone w polu elektrosta-
tycznym kondensatora otwartego zwiekszają jego pojemność, propor-
cjonalnie do stałej dielektrycznej izolatora (rys 2.3b). Wynika to z tego,
że pojemność początkowa kondensatora otwartego związana jest z
przenikalnością powietrza, a stałe dielektryczne cieczy czy ciał stałych
są zawsze większe od stałej dielektrycznej powietrza
(ε
powietrza
=1)
B
+
A
B
+
-
A
AC CB
B
+
A
B
+
-
A
b)
MATERIAŁ
PRZEWODZĄCY
MATERIAŁ
NIEPRZEWODZĄCY
a)
ε
r
ε
r
C
C
Rys 2.3:
Pole elektryczne w kondensatorze otwartym dla materiałów przewodzących
i nieprzewodzących
31
Komponenty mechatroniczne - Podręcznik
Minos
2.3
Zasada działania czujnika pojemnościowego
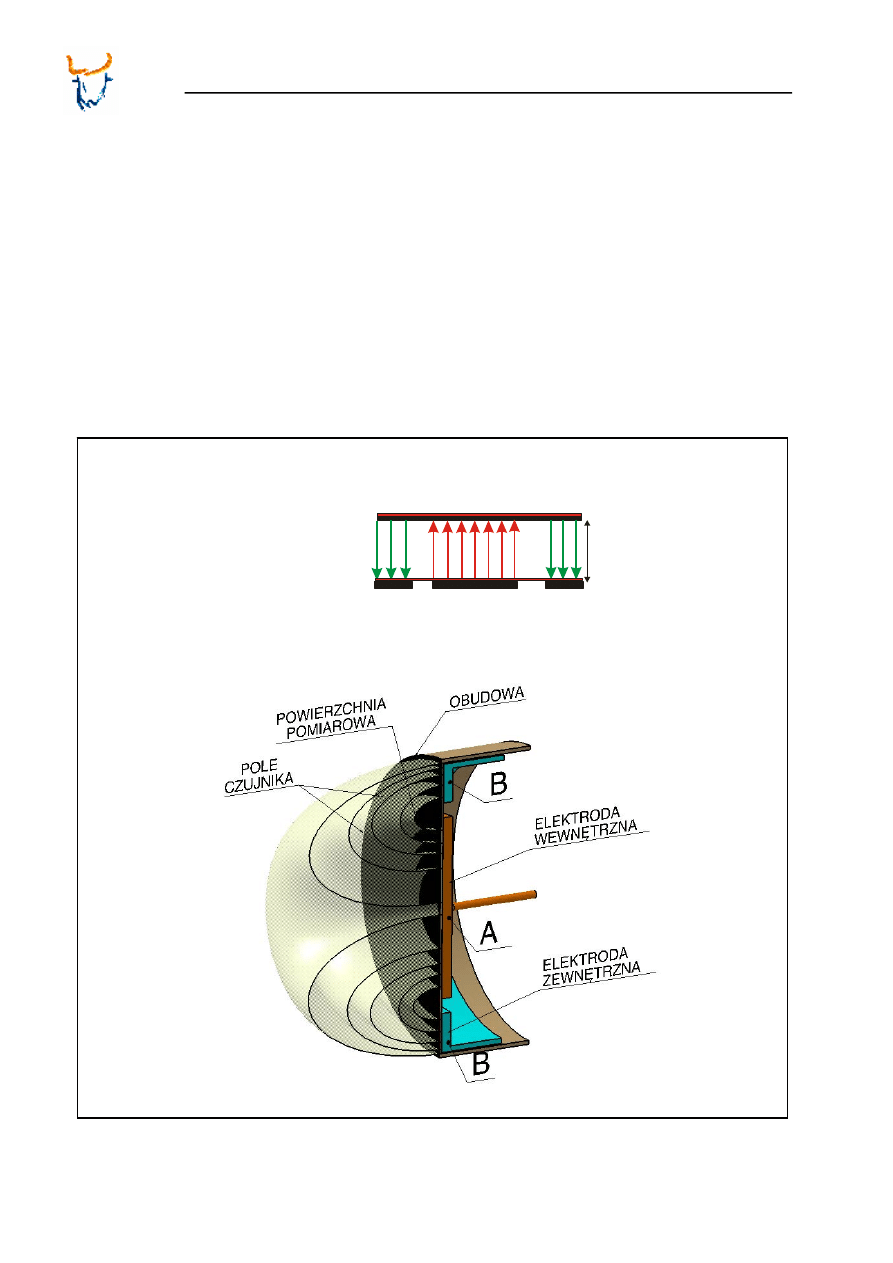
W celu wytworzenia symetrycznego pola elektrycznego, elektroda ze-
wnętrzna B musi mieć kształt pierścienia, koncentrycznego z cylin-
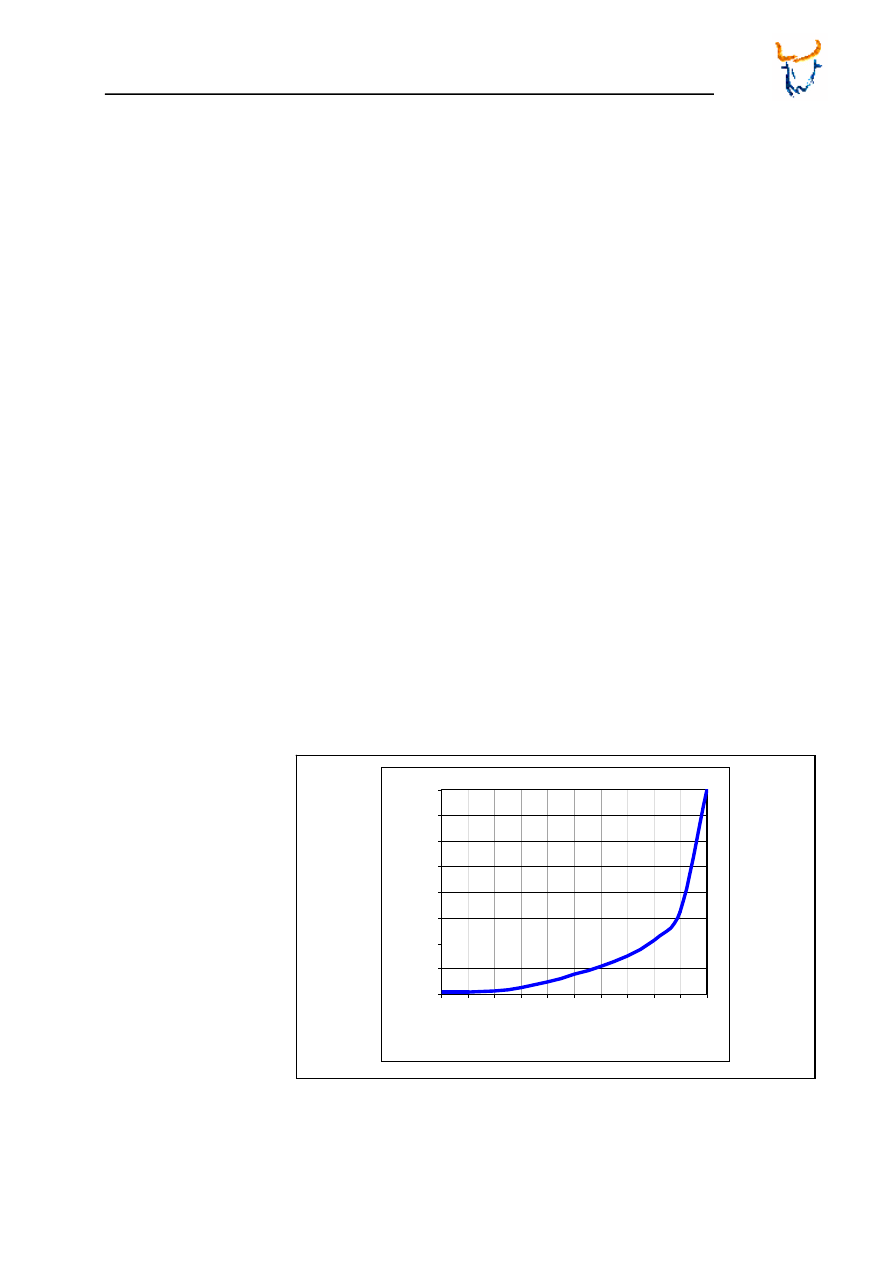
dryczną elektrodą A (rys. 2.4). Rolę elektrody pośredniej C, aktywują-
cej czujnik, pełni obiekt wykrywany. Za aktywną płaszczyznę czujnika
przyjmuje się zewnętrzną średnićę pierścienia B. Pojemność takiego
czujnika, maleje hiperbolicznie wraz z oddalaniem się przedmiotu wy-
krywanego.
C
B
0
U
U/2
A
s
ε
0
B
0
Powierzchnia
czujnika
Element
wykrywany
Rys. 2.4:
Układ pól elektrycznych w głowicy czujnika pojemnościowego
32
Komponenty mechatroniczne - Podręcznik
Minos
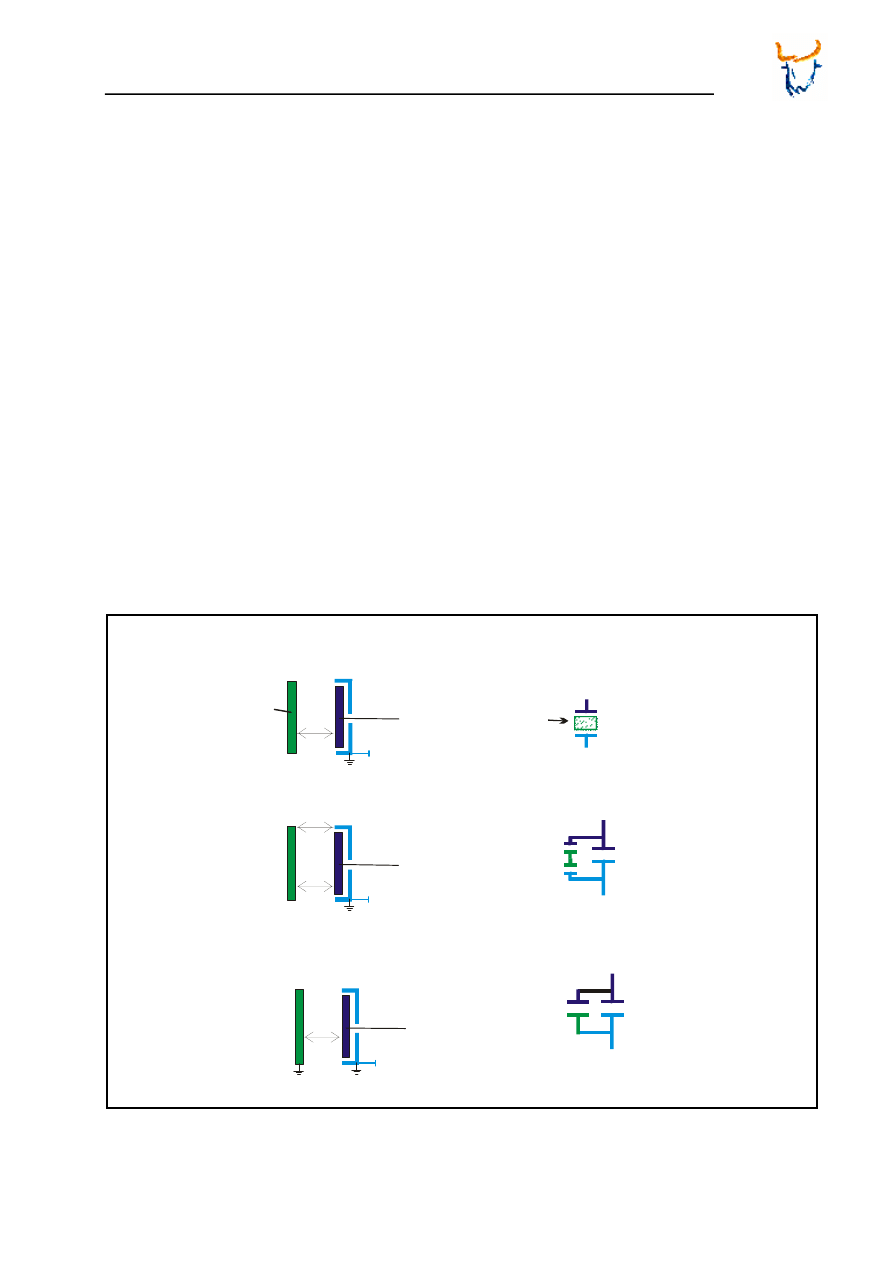
Struktura pojemnościowa czujnika zależy od rodzaju wykrywanego
obiektu i jego uziemienia.
Obiekty nieprzewodzące, takie jak tworzywa, papier czy szkło, zwięk-
szają tylko pojemność własną czujnika, poprzez oddziaływanie na jego
stałą dielektryczną (rys.2.5a) Wzrost tej pojemności, uzależniony od
wartości stałe dialektycznej obiektu, jest jednak niewielki i dlatego od-
ległość działania jest również mała.
W przypadku obiektów przewodzących nieuziemionych tworzą się
dwa dodatkowe kondensatory ułożone szeregowo, jeden między
obiektem a elektrodą czujnika i drugi między obiektem a elektrodą ze-
wnętrzną (rys.2.5b). Odległość działania czujnika jest w tym przypadku
większa.
Największą odległość działania uzyskuje się, gdy obiekt wykrywany
jest przewodnikiem i jednocześnie jest uziemiony. Wówczas dodatko-
wa pojemność, między obiektem i elektrodą, tworzy połączenie równo-
ległe z pojemnością własną czujnika (rys.2.5c).
S
OBIEKT
ELEKTRODA
CZUJNIKA
S
OBIEKT
ELEKTRODA
CZUJNIKA
S
S
OBIEKT
ELEKTRODA
CZUJNIKA
ε
r
ε
r
2 S
S
b)
b)
a)
c)
ELEKTRODA
ZEWNĘTRZNA
ELEKTRODA
ZEWNĘTRZNA
ELEKTRODA
ZEWNĘTRZNA
ELEKTRODA
CZUJNIKA
ELEKTRODA
ZEWNĘTRZNA
ELEKTRODA
CZUJNIKA
ELEKTRODA
CZUJNIKA
ELEKTRODA
ZEWNĘTRZNA
ELEKTRODA
ZEWNĘTRZNA
S
Rys 2.5:
Struktura pojemnościowa czujnika dla obiektu: a) nieprzewodzącego, b) przewo-
dzącego nieuziemionego, c) przewodzącego uziemionego
33
Komponenty mechatroniczne - Podręcznik
Minos
Elektrody A i B są sprzężone z oscylatorem o dużej częstotliwości (rys.
2.1). W przypadku braku obiektu w polu elektrycznym czujnika oscyla-
tor nie pracuje. Gdy obiekt wchodzi w pole wywołane przez elektrody
następuje uruchomienie oscylatora poprzez wzrost pojemności między
elektrodami A i B. Amplituda drgań oscylatora analizowana jest przez
układ detekcji, który generuje sygnał dla układu przełączającego. W
układzie sprzężenia zwrotnego, między oscylatorem a elektrodą, wy-
stępuje potencjometr, którym można ustawić próg zadziałania układu
oscylatora.
Dla czujnika pojemnościowego definjuje się nominalną odległość dzia-
łania S
n,
jako odległość, przy której następuje przełączenie układu wyj-
ściowego (rys. 2.6). Nominalna odległość działania czujnika pojemno-
ściowego odnośi się do obiektu metalowego uziemionego o grubości
1mm, wykonanago ze stali FE360 o przekroju kwadratowym, którego
bok równy jest średnicy czoła czujnika lub równy trzem wartościom S
n
,
w zależności, która wartość jest większa.
Rys. 2.6:
Definicje odległości działania czujnika pojemnościowego
34
Komponenty mechatroniczne - Podręcznik
Minos
2.4
Typy czujników pojemnościowych
Czujniki pojemnościowe są zazwyczaj dostępne w postaci cylindrycz-
nych lub prostopadłościennych czujników zbliżeniowych, z częścią ak-
tywną na jednym z końców (rys.2.7). Czujniki cylindryczne występują
w dwóch odmianach. Jedne są ekranowane, tak że mają strefę działa-
nia tylko od czoła czujnika i montuje się je powierzchniowo w metalu
lub tworzywie (rys. 2.8a). Drugie mają dodatkową strefę działania w
niewielkiej odległości od cylindrycznej powierzchni czujnika. Są to
czujniki do zastosowania w przypadkach, kiedy czujnik ma kontakt z
medium wykrywanym jak np. płyny czy granulat. Strefa działania tych
czujników jest o 50% większa, gdyż większe pole elekryczne czujnika
zamyka się na jego bokach. Występują również specjalne konstrukcje
jak elastyczne czujniki, które mogą być przyklejone do poziomych jak i
zakrzywionych powierzchni.
Rys. 2.7:
Typowe odmiany czujników pojemnościowych.
35
Komponenty mechatroniczne - Podręcznik
Minos
Przy montażu kilku czujników pojemnościowych należy zachować re-
guły zawarte na rys. 2.8, w celu uniknięcia wzajemnego oddziaływania
czujników i zakłóceń od elementów zewnętrznych.
Złącza przewodów zasilających i układów wyjściowych czujników po-
jemnościowych są podobne jak w czujnikach indukcyjnych. Możliwe są
więc czujniki pojemnościowe z dwoma, trzema lub czterema przewo-
dami. Mogą one być zasilane napięciem stałym jak i zmiennym.
a)
b)
Rys. 2.8:
Sposoby
montażu czujników pojemnościowych: a) powierzchniowych,
b) niepowierzchniowych
36
Komponenty mechatroniczne - Podręcznik
Minos
2.5
Materiał obiektu
Odległość przełączania czujników pojemnościowych może ulegać du-
żym zmianom. Największy zakres osiągany jest dla materiałów prze-
wodzących. Jak wspomniano powyżej odległość ta zależy też od
uziemienia obiektu wykrywanego.
W przypadku obiektów z materiałów przewodzących rodzaj materiału
nie ma wpływu na strefę działania. Dla materiałów nieprzewodzących
odległość przełączenia zależy od stałych dielektrycznych, tj. im więk-
sza stała dielektryczna tym większy zakres przełączenia. Odległość
działania czujników pojemnościowych ulega redukcji wraz ze zmniej-
szaniem się stałej dielektrycznej obiektu (rys. 2.9). W tabeli 2.1 wy-
mieniono wartości stałych dielektrycznych różnych materiałów nie-
przewodzących.
Odległość z jakiej czujnik wykrywa materiały organiczne, jak: drewno
czy ziarno, mocno zależy w dużym stopniu od zawartości wody w tych
materiałach. Związane to jest z bardzo dużą wartością stałej dielek-
trycznej wody (ε
wody
=80).
0
10
20
30
40
50
60
70
80
0
10 20 30 40 50 60 70 80 90 100
Obszar przełączeń
St
ał
a d
iel
ekt
rycz
n
a
ε
r
S
n
[%]
Rys 2.9:
Zakres przełączeń czujnika pojemnościowego w funkcji
stałej dielektrycznej nieprzewodzącego obiektu wykry-
wanego
37
Komponenty mechatroniczne - Podręcznik
Minos
Materiał
ε
r
Alkohol
25,8
Bakelit
3,6
Benzyna
2,2
Celuloza
3
Drewno
2 ... 7
Guma miękka
2,5
Guma silikonowa
2,8
Guma wulkanizowana
4
Marmur
8
Mika
6
Olej transformatorowy
2,2
Papier
2,3
Papier twardy
4,5
Parafina
2,2
Pleksiglas
3,2
Polyamid
5
Polyethylen
2,3
Polypropylen
2,3
Polystyren
3
Porcelana
4,4
Szkło
5
Teflon
2
Powietrze, próżnia
1
Woda
80
Tabela 2.1
Stała dielektryczna ε
r
różnych materiałów nieprzewod
zących
Nominalna odległość działania S
n
podawana w katalogach odnosi się
do znormalizowanego przedmiotu metalowego. Dla wyznaczenia rze-
czywistej odległości działania czujnika należy pomnożyć ją przez
współczynnik korekcji odpowiedni do rodzaju materiału wykrywanego
obiektu:
strefa działania=S
n
.
współczynnik korekcji
Przykładowe wartości tego współczynnika podano w tabeli 2.2.
Materiał Współczynnik korekcji
Stal 1
Woda 1
Drewno 0,7
Szkło 0,6
Olej 0,4
PCV 0,4
PE 0,37
Ceramika 0,3
Tabela 2.2:
Współczynniki korekcji dla różnych materiałów
38
Komponenty mechatroniczne - Podręcznik
Minos
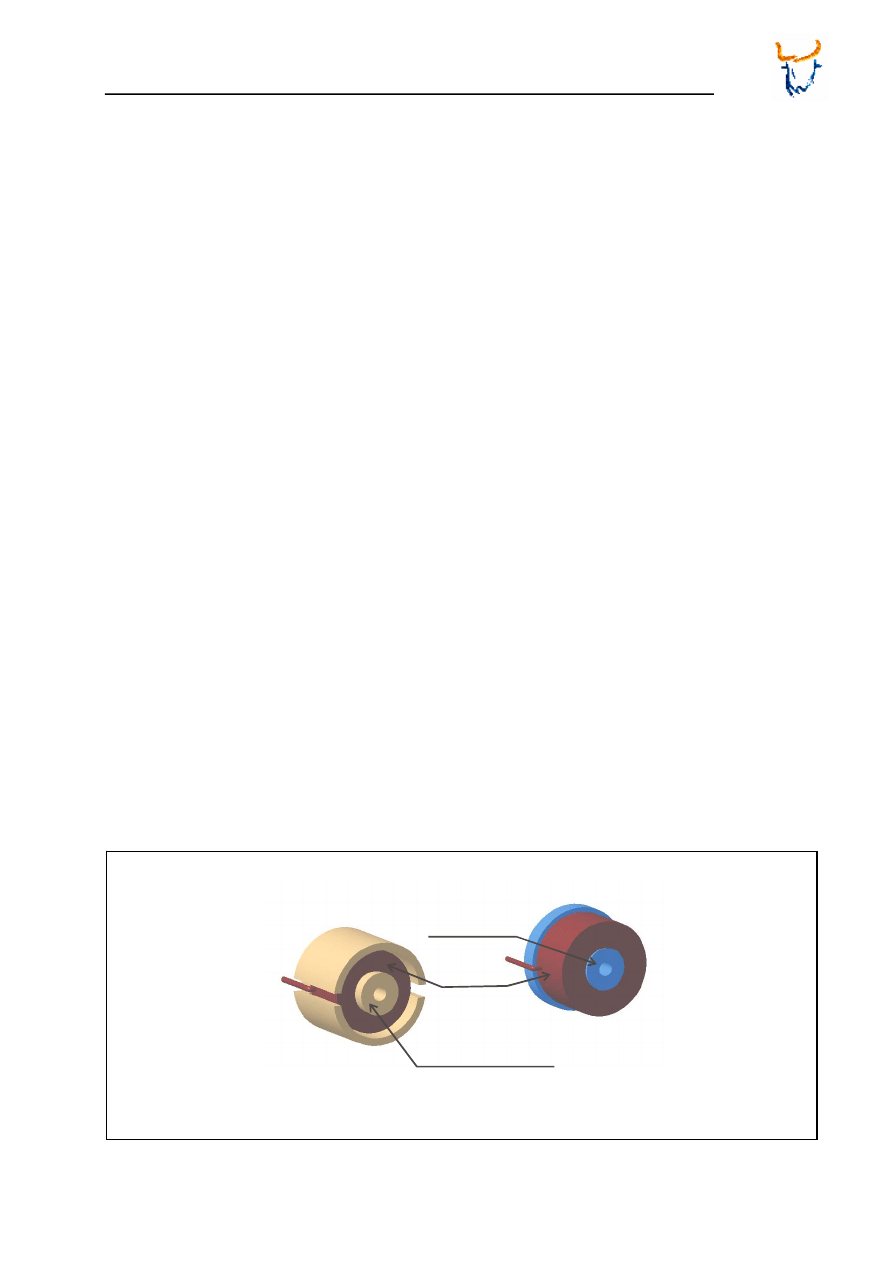
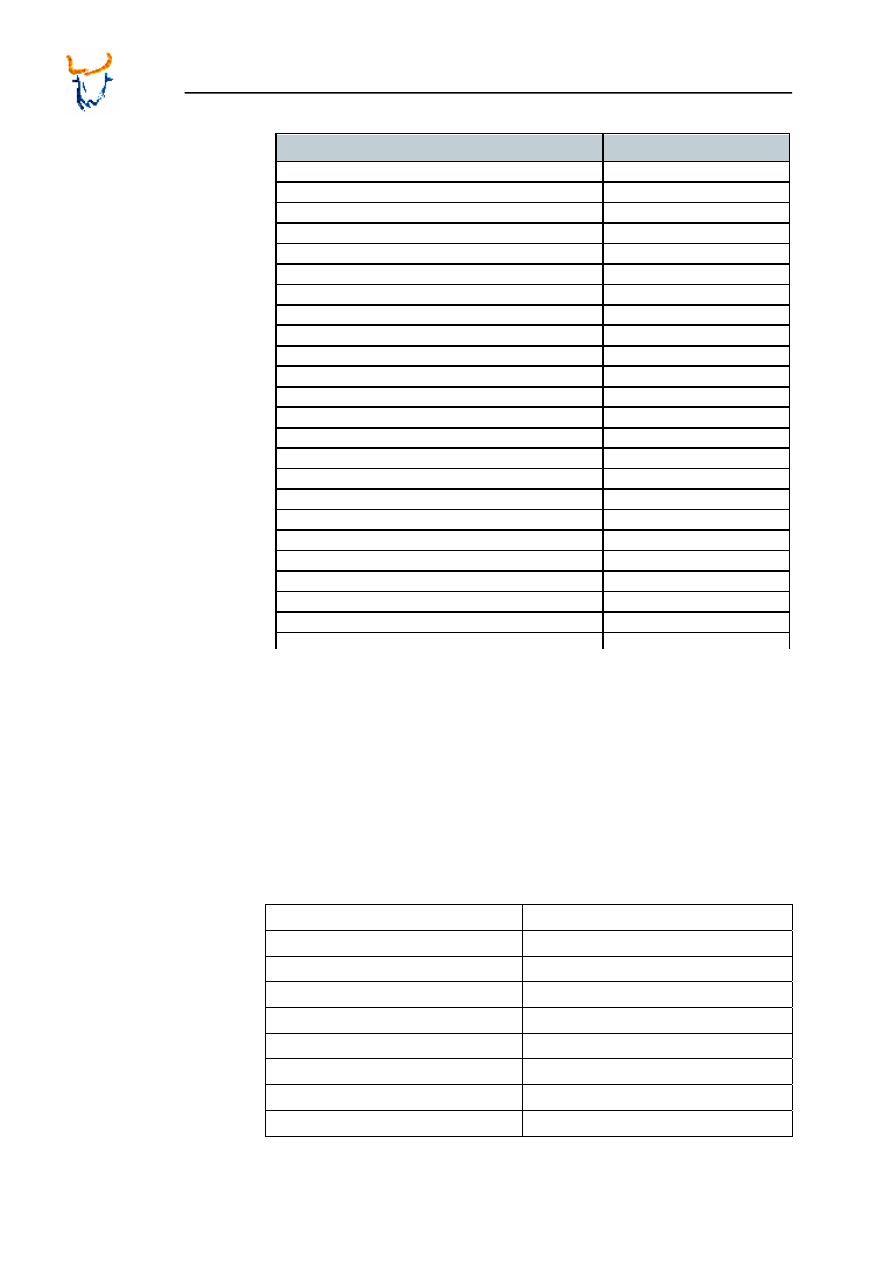
2.6
Kompensacja zakłóceń
W układzie detekcji stosuje się filtry interferencyjne, które eliminują
wpływ zewnętrznych pól elektrycznych, jeśli pola te nie są zbyt duże.
Filtry te mogą jednak znacznie obniżać maksymalną częstotliwość
przełączeń, pogarszając charakterystykę dynamiczną czujnika.
Zabrudzenie czujnika, zmiana wilgotności powietrza, lub osadzanie się
na aktywnych powierzchniach cząsteczek rosy, może być przyczyną
jego nieprawidłowych reakcji podczas eksploatacji. Aby utrzymać stałą
odległość wykrywania, w przypadku jednorodnego pola zakłóceń sto-
suje się dodatkowo elektrodę kompensacyjną, połączoną z wyjściem
oscylatora (rys.2.10). Zanieczyszczenie zwiększa pojemność pomię-
dzy elektrodą sensora i ekranem. Jednocześnie pojemność pomiędzy
elektrodą sensora i elektrodą kompensacyjną generuje sprzężenie
kompensacyjne. Jednak w przypadku bezpośredniego kontaktu cien-
kich obiektów z czujnikiem, np. kartka papieru, istnieje niebezpieczeń-
stwo, że sygnał zakłócenia będzie neutralizował odczyt elektrody
głównej i nie nastąpi przełączenia czujnika.
Rys. 2.10:
Czujnik z dodatkową elektrodą kompensacyjną
39
Komponenty mechatroniczne - Podręcznik
Minos
2.7
Aplikacje
W praktyce czujniki pojemnościowe ze względu na swoje cechy i pro-
stotę konstrukcji znajdują liczne zastosowania.
Czujniki te mogą monitorować:
-poziomy płynów w zbiorniku,
- poziomy granulatu w elewatorach,
- zliczać obiekty nieprzewodzące i przewodzące,
- wykrywać puste przestrzenie poprzez opakowanie,
- wykrywać uszkodzenia w obiektach.
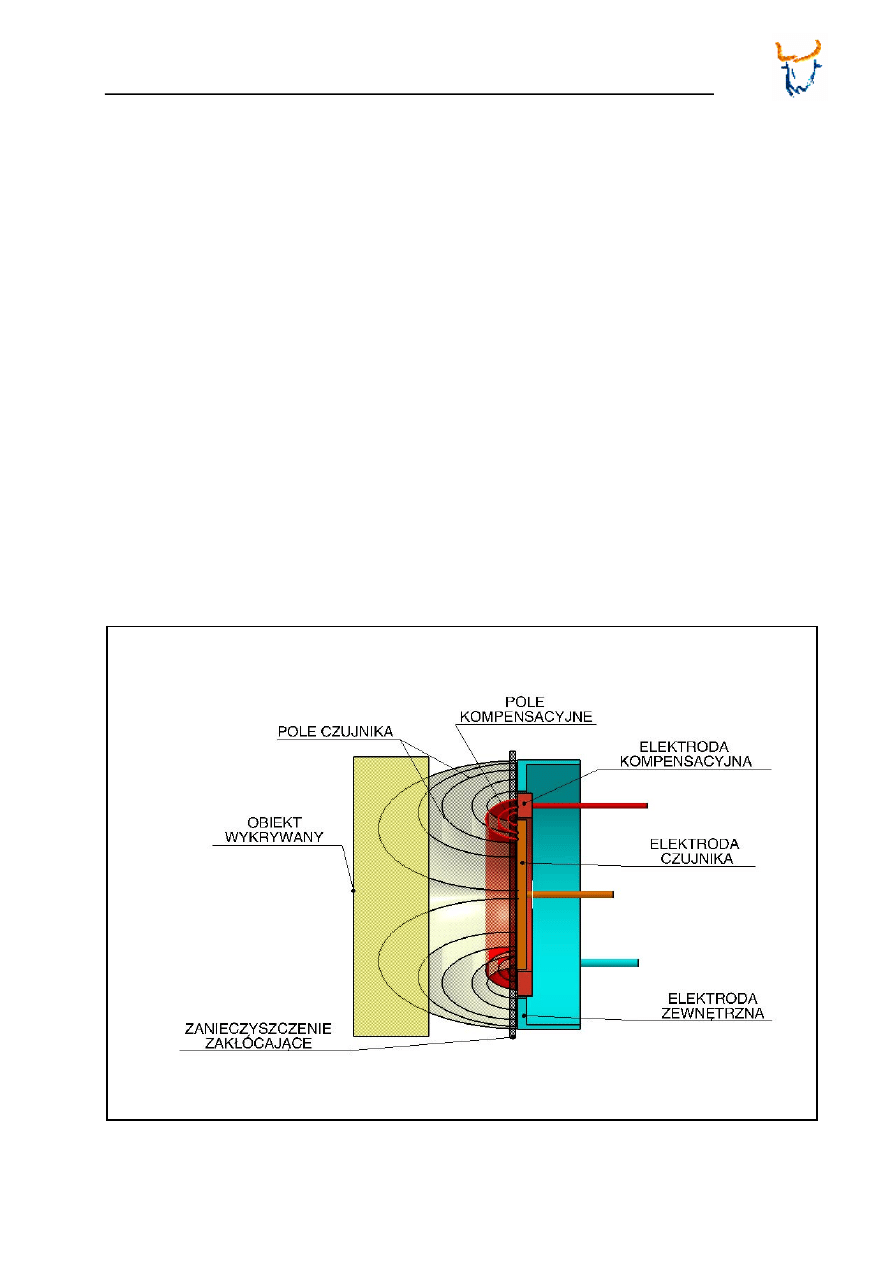
Rys. 2.11:
Wykrywanie i odrzucanie niepełnych pojemników z płynem
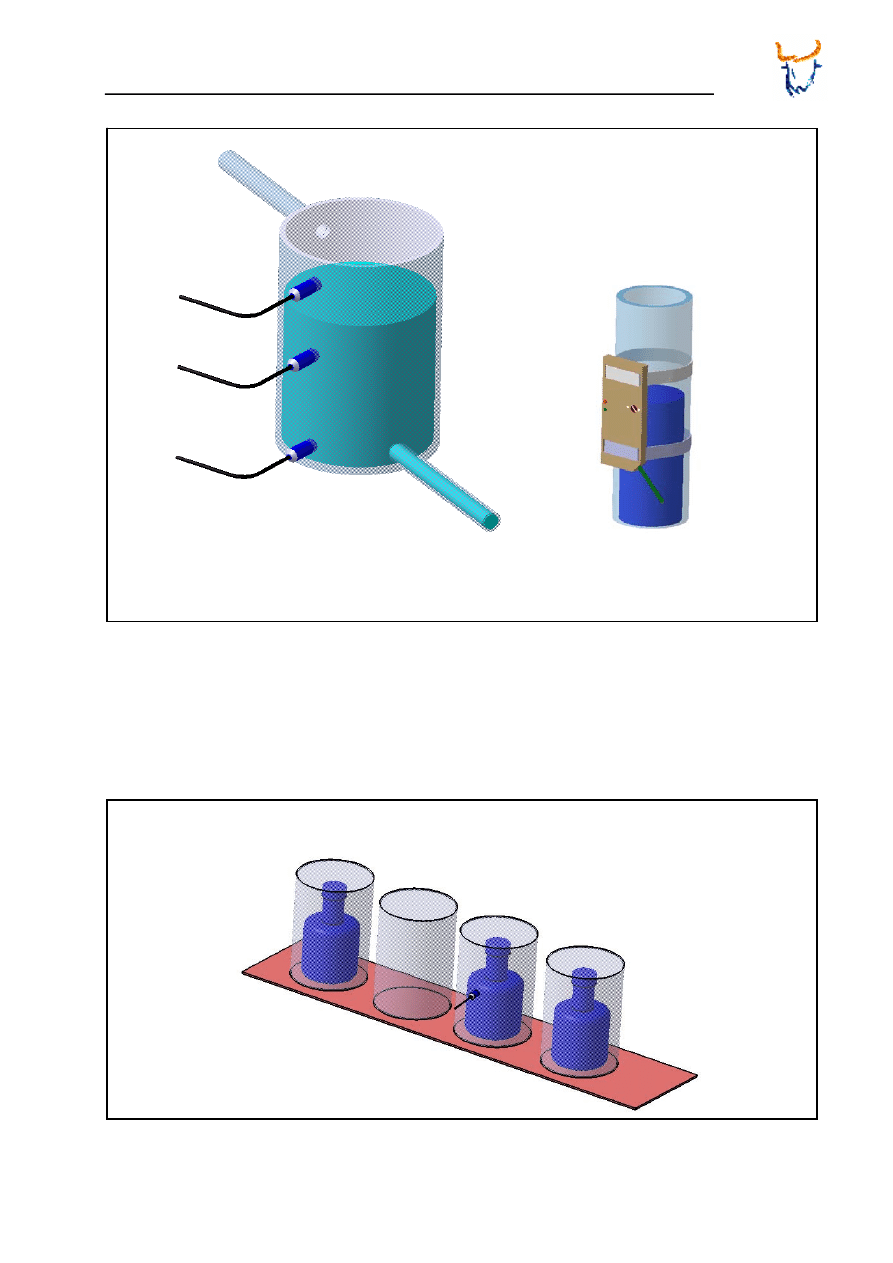
Rys. 2.12:
Zliczanie szklanych lub metalowych pojemników
40
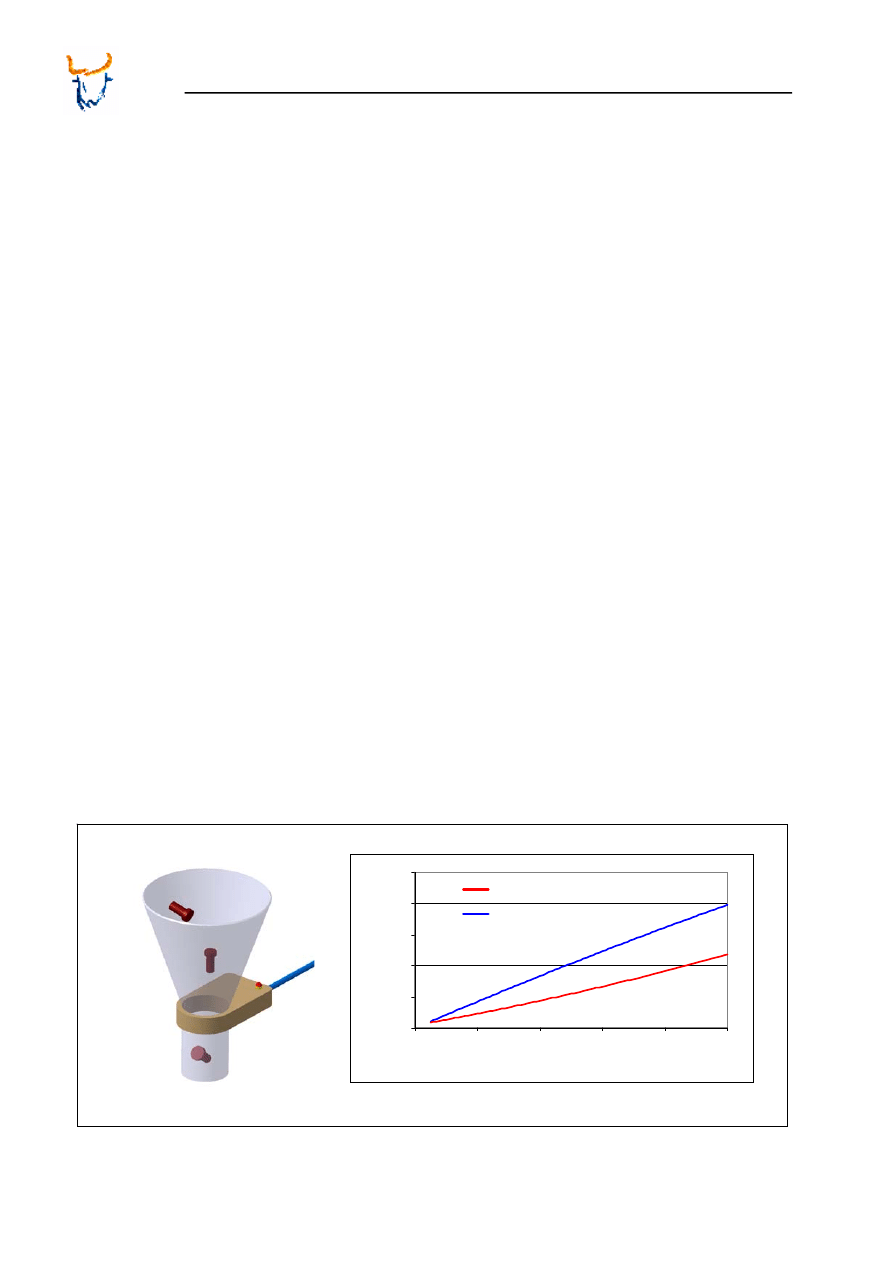
Komponenty mechatroniczne - Podręcznik
Minos
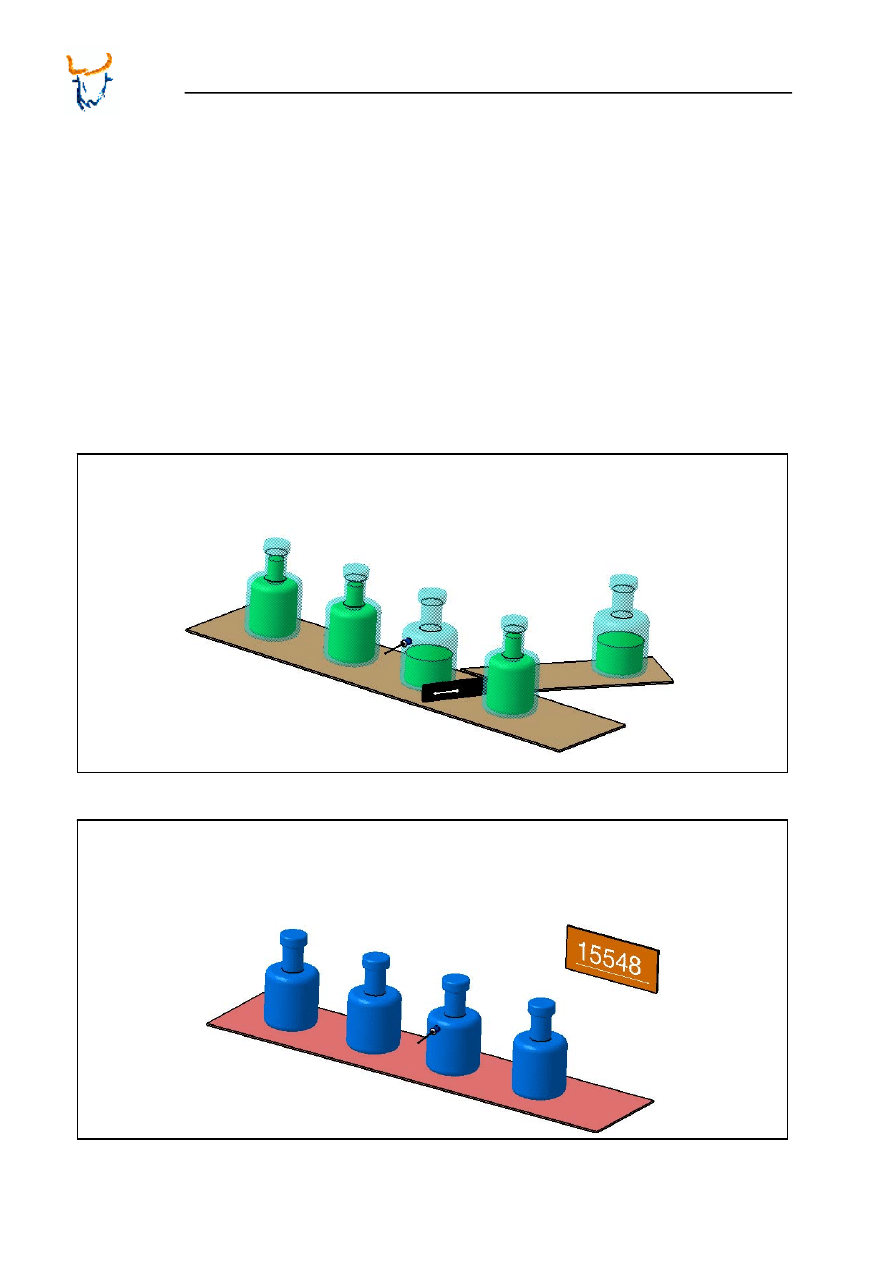
Rys 2.13:
Monitorowanie poziomu płynu w zbiorniku i wykrywanie poziomu napełnienia
przewodów
Rys. 2.14:
Wykrywanie pustych opakowań papierowych na taśmie
41
Komponenty mechatroniczne - Podręcznik
Minos
3
Czujniki ultradźwiękowe
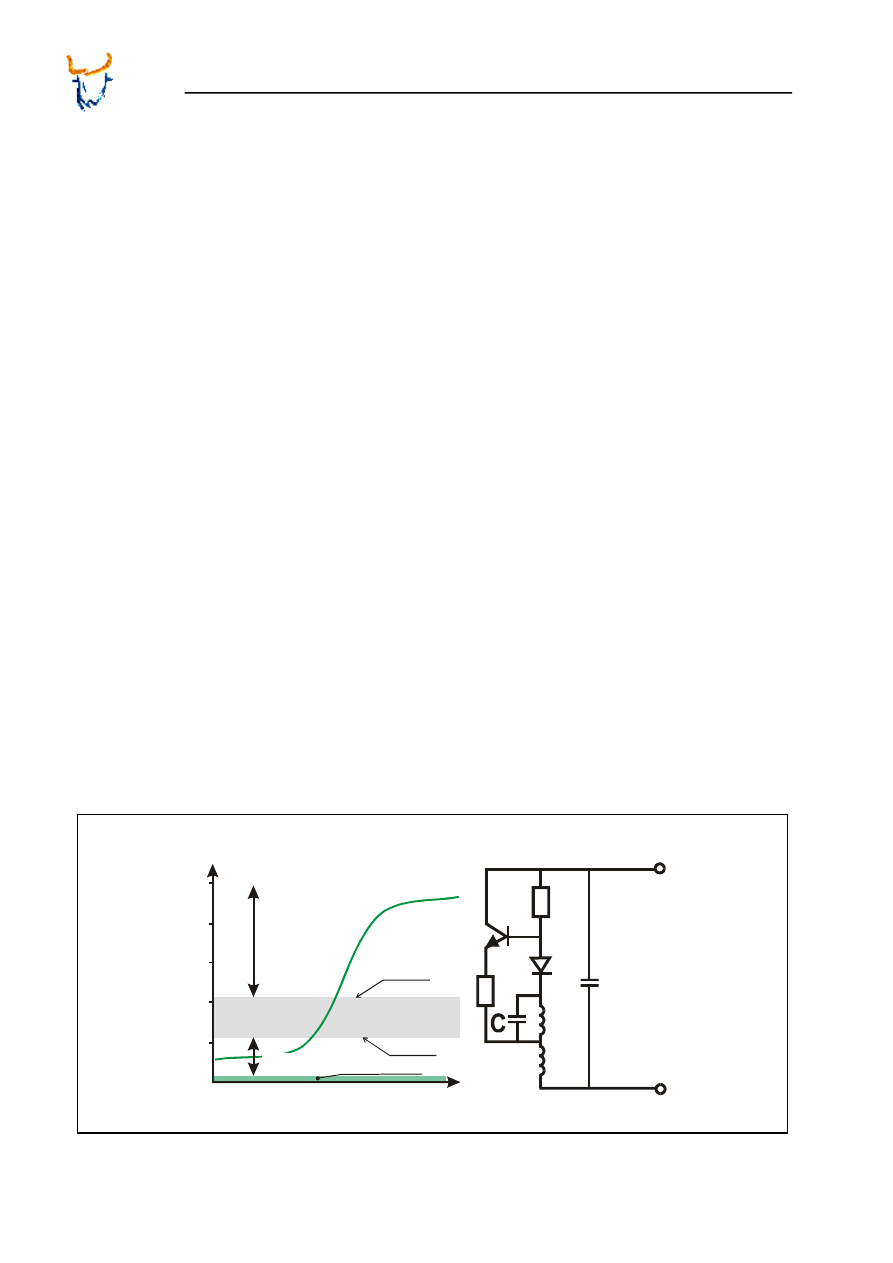
3.1
Informacje podstawowe
Czujniki ultradźwiękowe są stosowane do wykrywania obiektów nieza-
leżnie od rodzaju materiału i koloru, detekcji poziomów cieczy przeźro-
czystych i nieprzeźroczystych. Znajdują one zastosowanie przede
wszystkim w środowisku o dużym zapyleniu i w miejscach, gdzie ze
względu na znaczne zabrudzenie, nie jest możliwe zastosowanie czuj-
ników optycznych. Czujniki te generują wiązkę ultradźwiękową. Zasa-
da działania polega na pomiarze czasu upływającego pomiędzy wy-
słanym sygnałem ultradźwiękowym a odebranym echem, odbitym od
przeszkody. Czas ten jest proporcjonalny do odległości od obiektu.
Możliwe częstotliwości przełączania stanu wyjścia w tych czujnikach
są niewielkie (od kilku do ponad 100Hz) w porównaniu do innych czuj-
ników detekcyjnych, co wynika z zasady ich działania.
Przetworniki ultradźwiękowe generują fale akustyczne o częstotliwo-
ściach leżących, wyraźnie poza zasięgiem fal słyszalnych, czyli powy-
żej 20kHz.
Duża częstotliwość pracy przetwornika ultradźwiękowego sprawia, że
są one praktycznie odporne na interferencję z dźwiękami występują-
cymi w otoczeniu czujnika.
Głównymi składnikami takiego czujnika są: generator wysokiego na-
pięcia, przetwornik piezoelektryczny umieszczony w głowicy czujnika,
układ przetwarzania sygnału i układ wyjściowy (rys. 3.1).
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
GENERATORA
GŁOWICA
CZUJNIKA
OBIEKT
Rys. 3.1:
Schemat blokowy czujnika ultradźwiękowego
42
Komponenty mechatroniczne - Podręcznik
Minos
3.2
Podstawy teoretyczne
3.2.1
Rozchodzenie się fal dźwiękowych w powietrzu
Fale dźwiękowe mogą rozchodzić się w różnych ośrodkach (gazy, cie-
cze, ciała stałe) dzięki wzajemnemu oddziaływaniu cząsteczek danego
ośrodka. W powietrzu fale dźwiękowe są falami podłużnymi i ich roz-
chodzenie się związane jest ze zderzaniem się drgających cząsteczek
powietrza z cząsteczkami sąsiadującymi, pobudzając je tym samym do
drgań. Dzięki temu fala dźwiękowa przemieszcza się w przestrzeni,
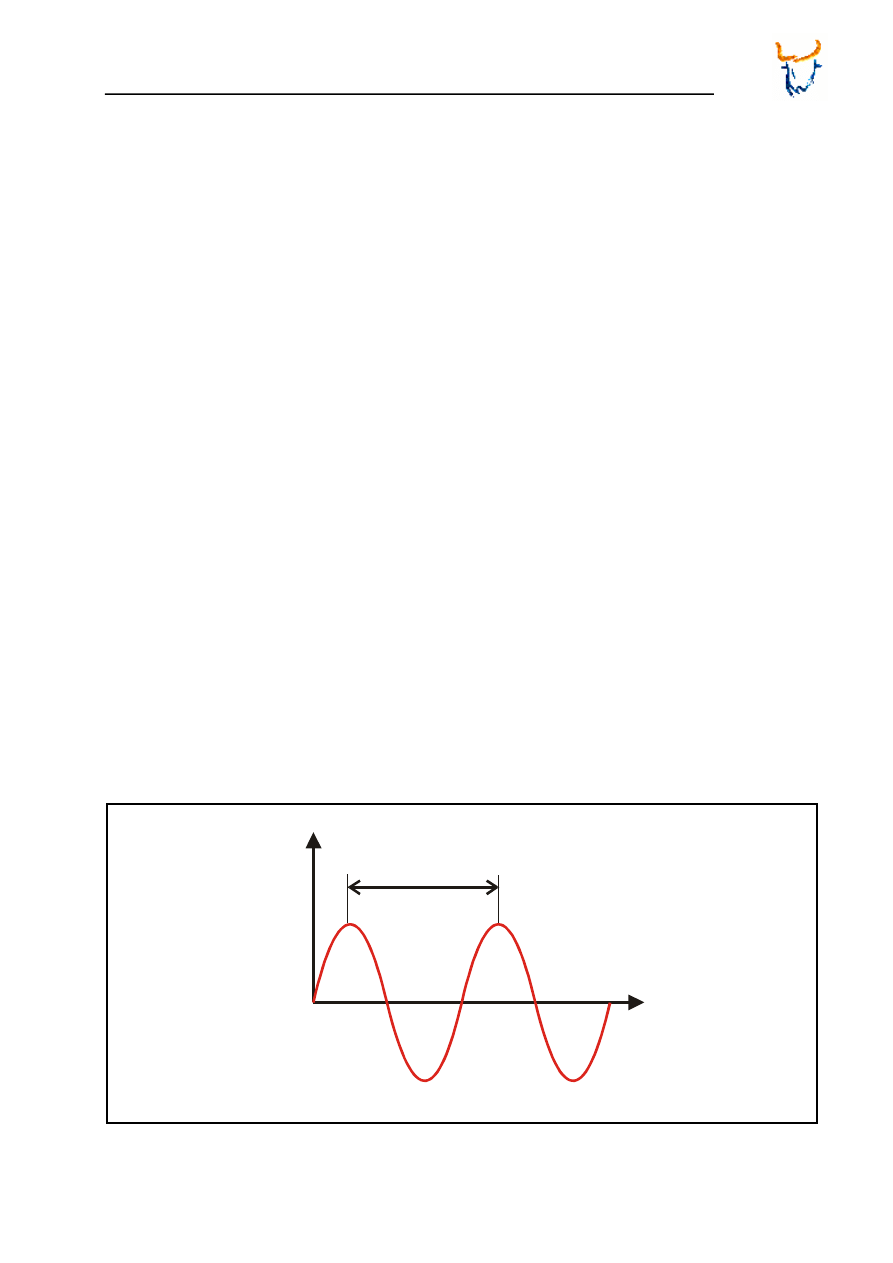
bez przemieszczania się drgających cząsteczek powietrza.
Długość fali dźwiękowej λ jest to długość drogi, jaką fala przebiega w
ciągu jednego okresu (rys. 3.2). Częstotliwość f drgań określa się licz-
bą okresów występujących w ciągu jednej sekundy. Wyraża się ją w
hercach [Hz].
Prędkość rozchodzenia się dźwięku V zależy od właściwości (gęstości
i podatności mechanicznej lub sprężystości) ośrodka, w którym dźwięk
się rozchodzi. Podstawowy wzór na prędkość fali, ma postać:
V = λ٠f
[m/s]
gdzie:
f – częstotliwość dźwięku (w Hz)
λ – długość fali dźwiękowej (w metrach).
Y
X
λ
Rys. 3.2:
Fala dźwiękowa
43
Komponenty mechatroniczne - Podręcznik
Minos
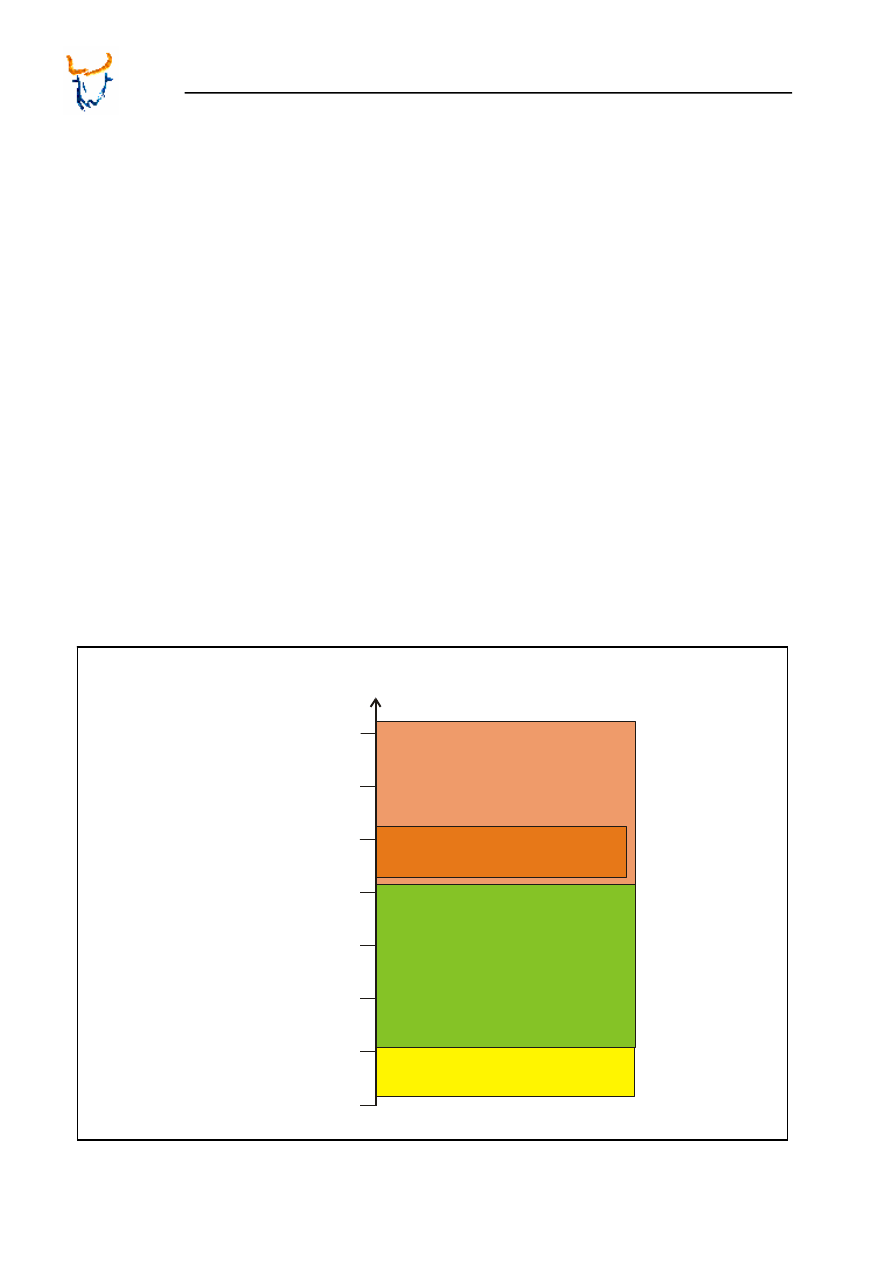
W czujnikach ultradźwiękowych detekcyjnych służących do wykrywa-
nia przedmiotów stosowane są zwykle częstotliwości dźwięku z zakre-
su od 23 kHz do 400kHz (rys. 3.3).
Infradźwięki
1Hz 20Hz
÷
Dźwięki słyszalne
20Hz 20kHz
÷
Częstotliwość Hz
10000000
1000000
100000
10000
1000
100
10
0
Ultradźwięki
od 20kHz
Czujniki - zakres pracy
23kHz 400kHz
÷
Rys. 3.3:
Zakresy częstotliwości fal dźwiękowych
44
Komponenty mechatroniczne - Podręcznik
Minos
Rozchodzenie się fal dźwiękowych podlega podobnym prawom fizyki
jak rozchodzenie się fal świetlnych. W przypadku tych fal może docho-
dzić do częściowego lub całkowitego odbicia fali od przeszkody.
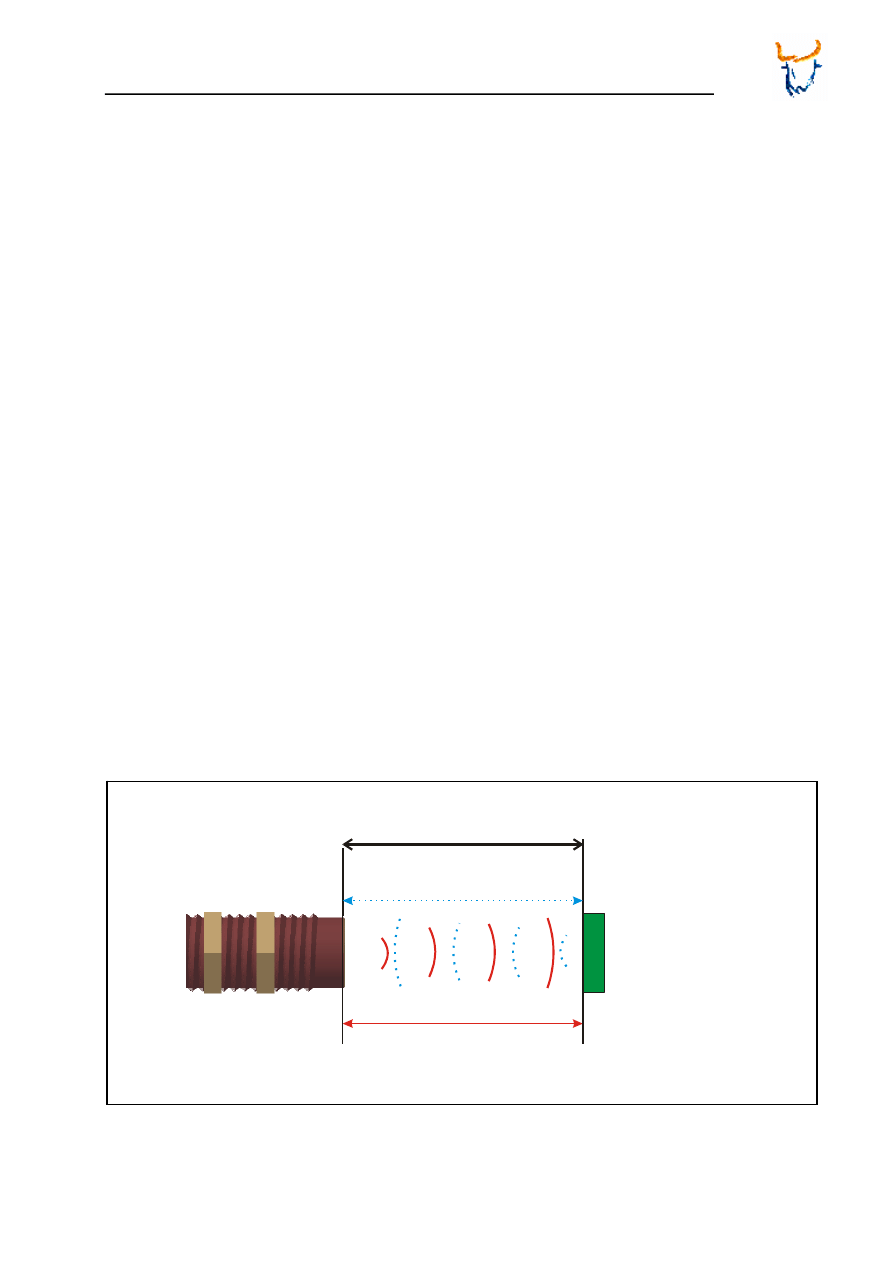
Znając prędkość dźwięku w powietrzu można, na podstawie pomiaru
czasu powrotu fali odbitej (echa) do czujnika, wyznaczyć odległość S
przeszkody od czujnika ze wzoru:
S= V٠t / 2
gdzie:
V − prędkość rozchodzenia się dźwięku w powietrzu (343m/s w 20
o
C),
t − czas od wysłania do odebrania ultradźwięków w [s],
S − odległość między czujnikiem a przeszkodą w [m].
Iloczyn prędkości i czasu należy podzielić przez dwa, ponieważ fala ul-
tradźwiękowa pokonuje odległość od nadajnika do przeszkody S
1
i od
przeszkody do odbiornika S
2
(rys. 3.4).
S
1
S
2
S
Czujnik
Przeszkoda
Rys. 3.4:
Odległość przeszkody jako połowa drogi fali ultradźwiękowej (S- odległość prze-
szkody od czujnika, S1- droga fali dźwiękowej od czujnika do przeszkody, S2-
droga odbitego echa od przeszkody do czujnika)
45
Komponenty mechatroniczne - Podręcznik
Minos
3.2.2
Wpływ środowiska
Propagacja dźwięku, jego zasięg, rozkład i prędkości fali dźwiękowej
zależy w pewnym stopniu od środowiska, w którym fala się rozchodzi.
Przypadkowe zmiany własności fizycznych środowiska, jakim jest po-
wietrze, mogą w konsekwencji oddziaływać na dokładność wyniku
pomiaru odległości. Do własności tych należą:
Temperatura: Wahania temperatury powietrza powodują zmianę
prędkości fali dźwiękowej (rys. 3.5). Zmiany te są rzędu 0.17%/°K.
Większość czujników posiada wewnętrzną elektroniczną kompensację
wpływu temperatury, co w dużym stopniu (około w 2/3) eliminuje nie-
korzystne skutki jej oddziaływania.
Ciśnienie: Wahania ciśnienia atmosferycznego w granicach ±5%,
zmieniają prędkość fali dźwiękowej o około ±0.6%.
Wilgotność: Wzrost wilgoci powietrza powoduje zwiekszenie
prędkości dźwięku maksymalnie o 2 % w stosunku do powietrza
suchego.
Prądy powietrzne: Oddziaływanie prądów powietrznych jest zależne
od ich kierunku i intensywności. Silne wiatry powyżej 50 km/h, wiejące
w kierunku zgodnym kierunkiem propagacji fali dźwiękowej mogą zna-
cząco zmienić jej prędkość. Wiejące natomiast prostopadle odchylają
ją, co też jest niekorzystne.
Zanieczyszczenie: Duże zanieczyszczenie powietrza powoduje za-
brudzenie powierzchni nadajnika fali dźwiękowej, co może ograniczyć
zasięg emitowanej wiązki nawet do 30%.
Ciśnienie 1013hPa
310
320
330
340
350
360
370
-20
-10
0
10
20
30
40
50
60
Temperatura [ºC]
Pr
ę
dko
ść
d
żwi
ę
k
u
[m
/s
]
Rys. 3.5:
Wpływ temperatury powietrza na prędkość fali dźwięko-
wej
46
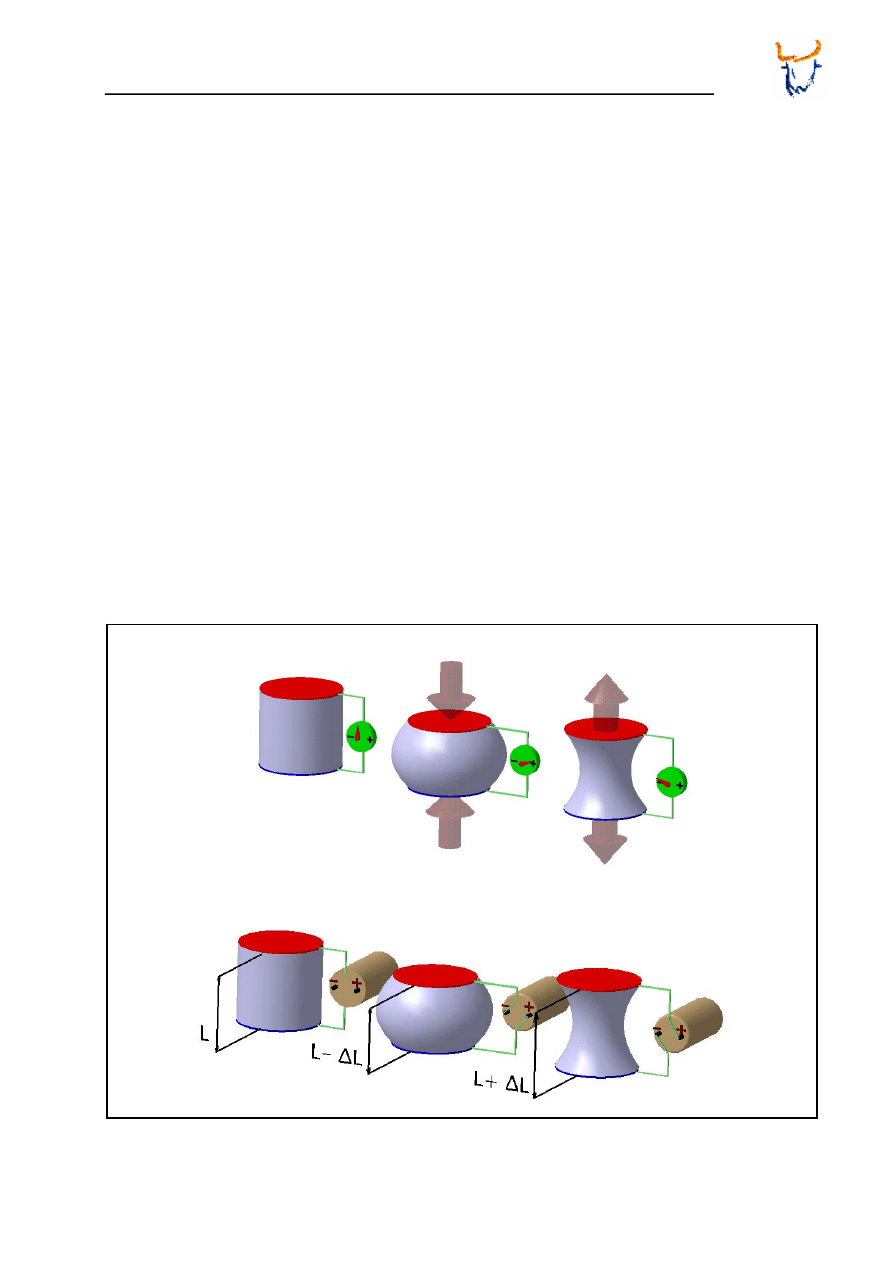
Komponenty mechatroniczne - Podręcznik
Minos
3.2.3
Przetworniki fali dźwiękowej
Fale ultradźwiękowe wytwarza się za pomocą przetworników, przy
czym najszersze praktyczne zastosowanie mają przetworniki piezo-
elektryczne. Efekt piezoelektryczny polega na powstawaniu ładunków
elektrycznych w przetworniku pod wpływem naprężeń.
Własności piezoelektryczne wykazują niektóre kryształy, takie jak
kwarc lub siarczan litu. Jest to związane ze śrubowym ułożeniem ko-
mórek elementarnych sieci krystalicznej kwarcu. Zjawisko to jest od-
wracalne, a wiec pod wpływem napięcia przyłożonego do przetwornika
ulega on odkształceniom. Rozróżnić można dwa rodzaje efektu:
- Bezpośredni efekt piezoelektryczny, który polega na zamianie od-
działywań mechanicznych (np. ciśnienia) na sygnał elektryczny
(rys.3.6a).
- Odwrotny efekt piezoelektryczny, który polega na przekształceniu
sygnału elektrycznego w ruch lub oscylacje mechaniczne (rys. 3.6b).
a)
b)
Rys.3.6:
Efekt piezoelektryczny: a) bezpośredni, b) odwrotny
47
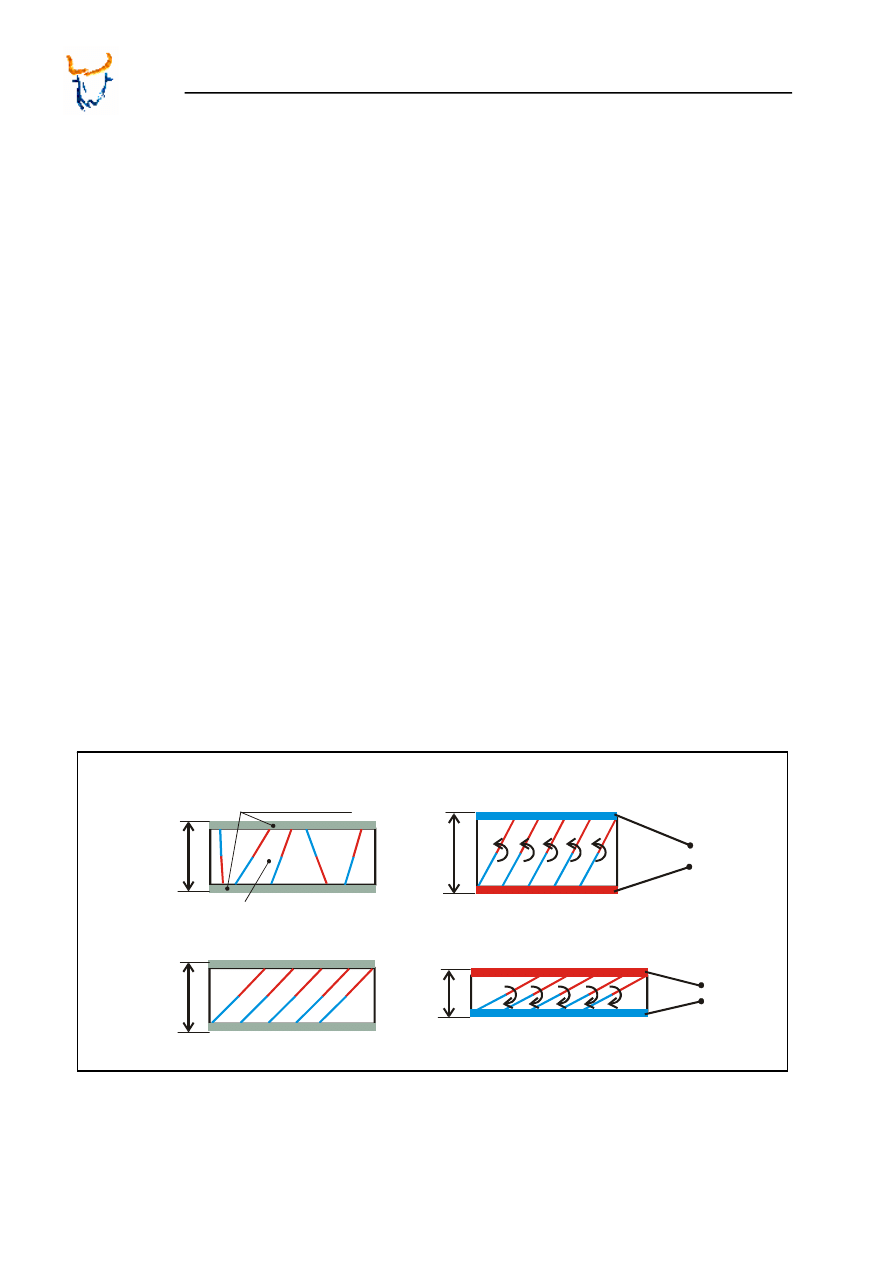
Komponenty mechatroniczne - Podręcznik
Minos
Odkształcenia przetwornika
∆l, równe amplitudzie generowanej fali, są
proporcjonalne do przyłożonego napięcia U [V]. Rolę współczynnika
proporcjonalności pełni w tym przypadku stała piezoelektryczna d (d
kwarcu
=2,3*10
-12
[m/V]).
∆l = d٠U
[m]
Materiały ceramiczne należące do grupy ferroelektryków również wy-
kazują własności piezoelektryczne. Podstawową cecha ferroelektry-
ków jest zdolność do trwałego uszeregowania w nich dipoli elektrycz-
nych, po zaniku pola elektrycznego. Wynika ona ze specjalnej budowy
materiałów ceramicznych.
Pod wpływem silnego pola elektrycznego, nieregularnie zorientowane
dipole elektryczne (rys. 3.7a), zostają trwale zorientowane w określo-
nym kierunku. W tak przygotowanym przetworniku ceramicznym dipole
usytuowane są pod katem 45° do powierzchni przetwornika (rys.
3.7.b). Po przyłożeniu napięcia do powierzchni płytki dipole ulegają ob-
rotom, zgodnie z zasada przyciągania się ładunków różnoimiennych,
tj. ładunki jednoimienne (+ i + lub – i –) odpychają się a różnoimienne
przyciągają (+ i – lub – i +). Odpowiednie obroty dipoli powodują
zwiększenie lub zmniejszenie grubości przetwornika o wartość
∆L, za-
leżnie od znaku przyłożonego potencjału na danej powierzchni płytki
(rys 3.7c, d).
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
+
-
-
+
+ + + + +
+ + + + +
- - - - -
- - - - -
a)
b)
c)
d)
+
-
+
+
+
+
-
-
-
-
L
L+ L
∆
L
L- L
∆
Powierzchnie
metalizowane
Płytka ceramiczna
Rys. 3.7:
Schemat odkształceń przetwornika ceramicznego pod wpływem efektu piezoelek-
trycznego: a) przetwornik przed uporządkowaniem dipoli elektrycznych b) prze-
twornik po trwałym uporządkowaniu dipoli, c), d) odkształcenia przetwornika pod
wpływem przykładanego napięcia
48
Komponenty mechatroniczne - Podręcznik
Minos
Kształty elementów piezoelektrycznych, a zwłaszcza ceramicznych
mogą być bardzo zróżnicowane (rys. 3.8).
Materiały piezoelektryczne są dielektrykami i dlatego w celu doprowa-
dzenia napięcia przeciwlegle powierzchnie przetworników metalizuje
się. Mogą to być np. warstewki srebra o grubości rzędu kilku do kilku-
dziesięciu mikrometrów.
Własności piezoelektryczne zanikają w wysokich temperaturach. Mak-
symalna temperatura pracy przetwornika kwarcowego nie powinna
przekraczać 200
0
C, a ceramicznego 100
0
C.
Sprawność przetwarzania energii elektrycznej na mechaniczną w prze-
twornikach ceramicznych jest kilka razy większa niż w przetwornikach
kwarcowych.
Rys. 3.8:
Typowe kształty elementów piezoelektrycznych
49
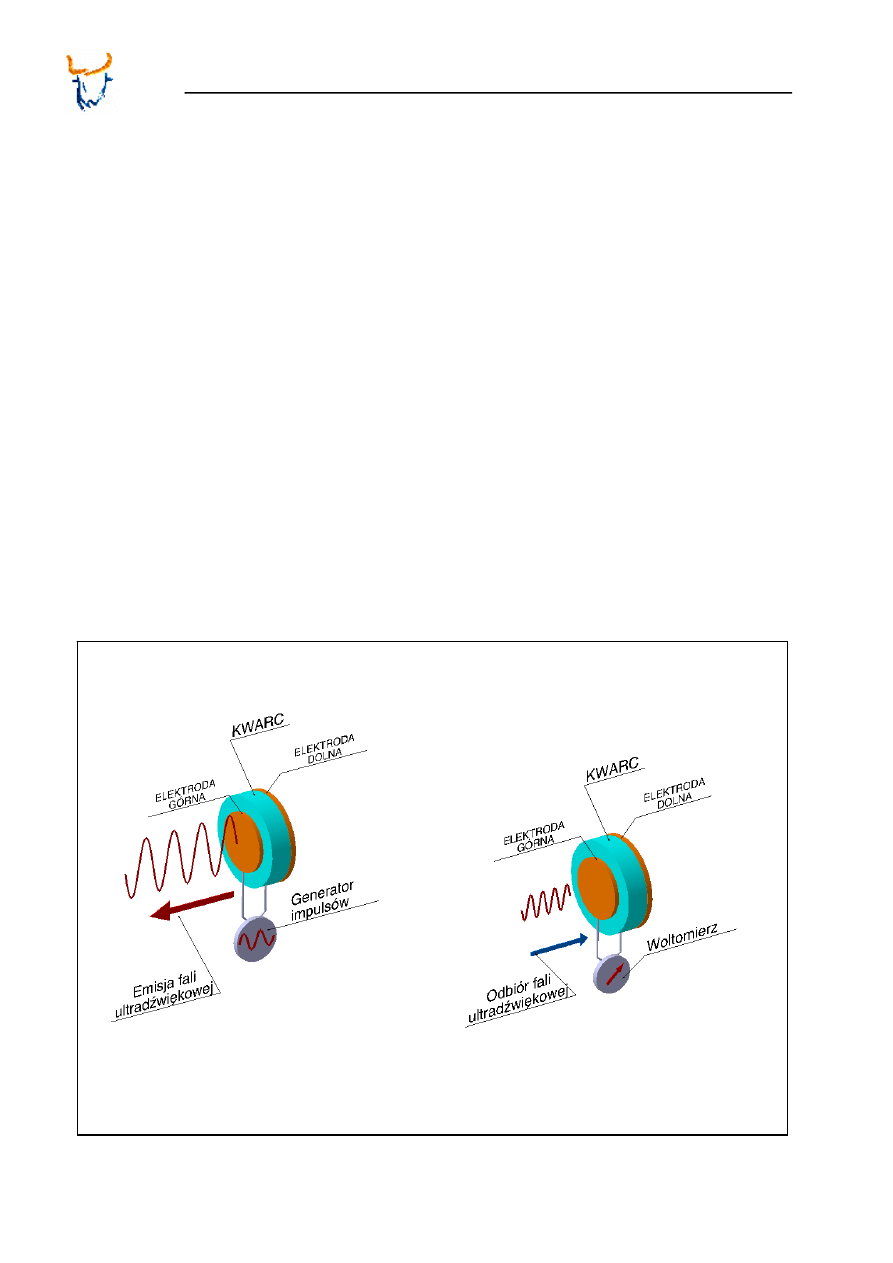
Komponenty mechatroniczne - Podręcznik
Minos
3.2.3
Wytwarzanie fali ultradźwiękowej
Gdy przetwornik styka się z materiałem lub innym medium np. powie-
trzem, to jego drgania spowodowane zmianami napięcia przekazywa-
ne są cząstkom tego medium i w ten sposób wzbudzona zostaje w nim
fala. I odwrotnie, jeśli drgania cząsteczek medium przekazane zostaną
przetwornikowi, to pod wpływem doznawanych odkształceń na po-
wierzchniach tego przetwornika powstają ładunki elektryczne. Tak
wiec, jeśli jest taka potrzeba, to ten sam przetwornik piezoelektryczny
służyć może zarówno do wytwarzania, jak i do odbioru fal (rys.3.9).
Rys. 3.9:
Nadajnik i odbiornik fali ultradźwiękowej
50
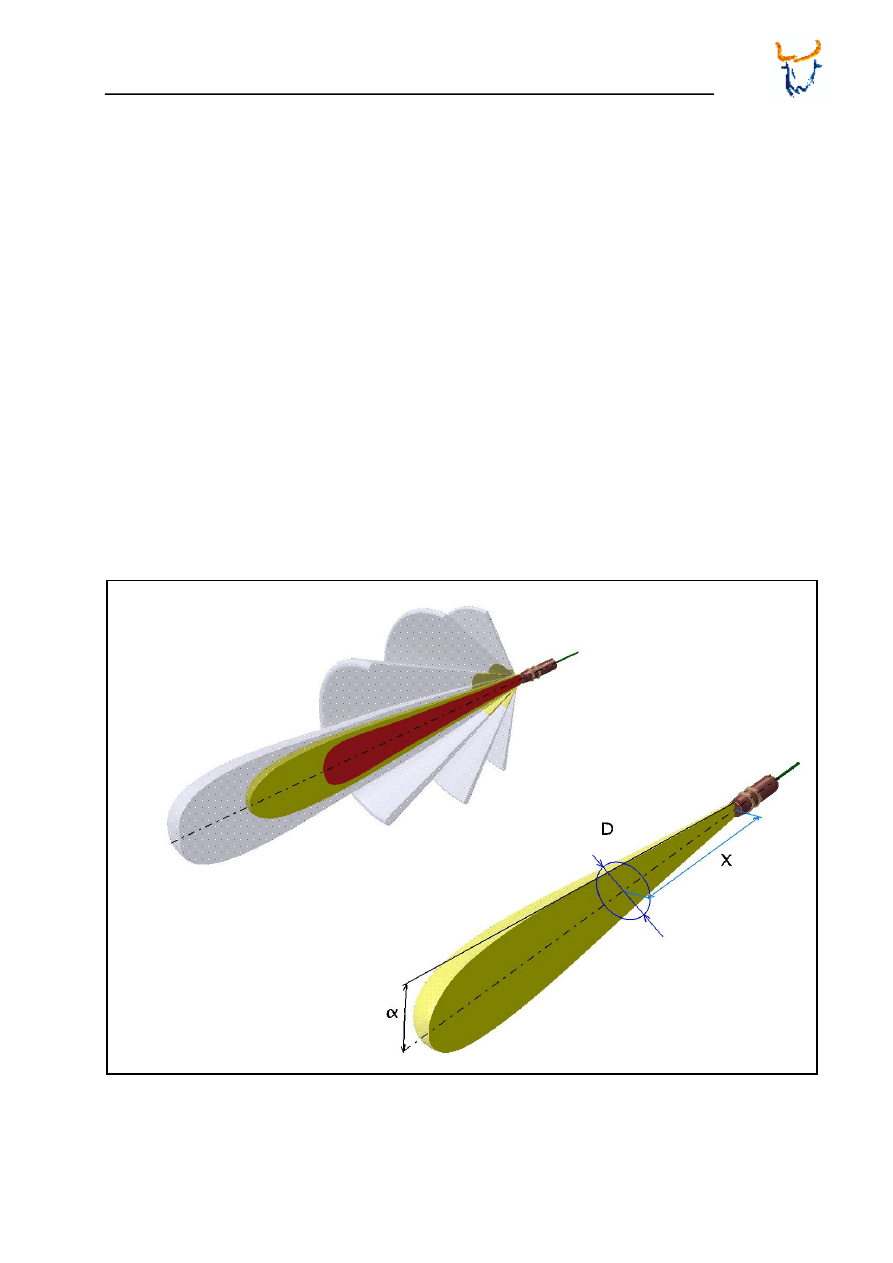
Komponenty mechatroniczne - Podręcznik
Minos
Obszar rozchodzenia się fali ultradźwiękowej jest w znacznym stopniu
rozproszony (rys. 3.10a). Największa energia dźwięku występuje w
pobliżu osi czujnika. Jeśli założyć, że w obszarze zaznaczonym kolo-
rem szarym energia wiązki dźwiękowej jest już niewystarczająca dla
poprawnej pracy czujnika, to kształt wiązki przydatnej w pomiarach jest
zbliżony do powierzchni stożka o kącie
α (rys. 3.10b). Kąt ten wyzna-
cza obszar, w którym energia fali ultradźwiękowej nie spada poniżej
50% energii występującej w pobliżu osi centralnej stożka.
Średnicę stożka wiązki ultradźwiękowej D, w odległości X od czoła
czujnika, można wyznaczyć z zależności:
D = 2٠X٠tan (
α/2)
Gdzie:
X – odległość przedmiotu od czujnika
α – kąt stożka wiązki ultradźwiękowej
b)
a)
Rys.
3.10:
Schematyczny widok fali ultradźwiękowej emitowanej przez czujnik:
a) przekrój wzdłuż osi czujnika, b) fragment wiązki spełniający wymagania czujni-
ka ultradźwiękowego
51
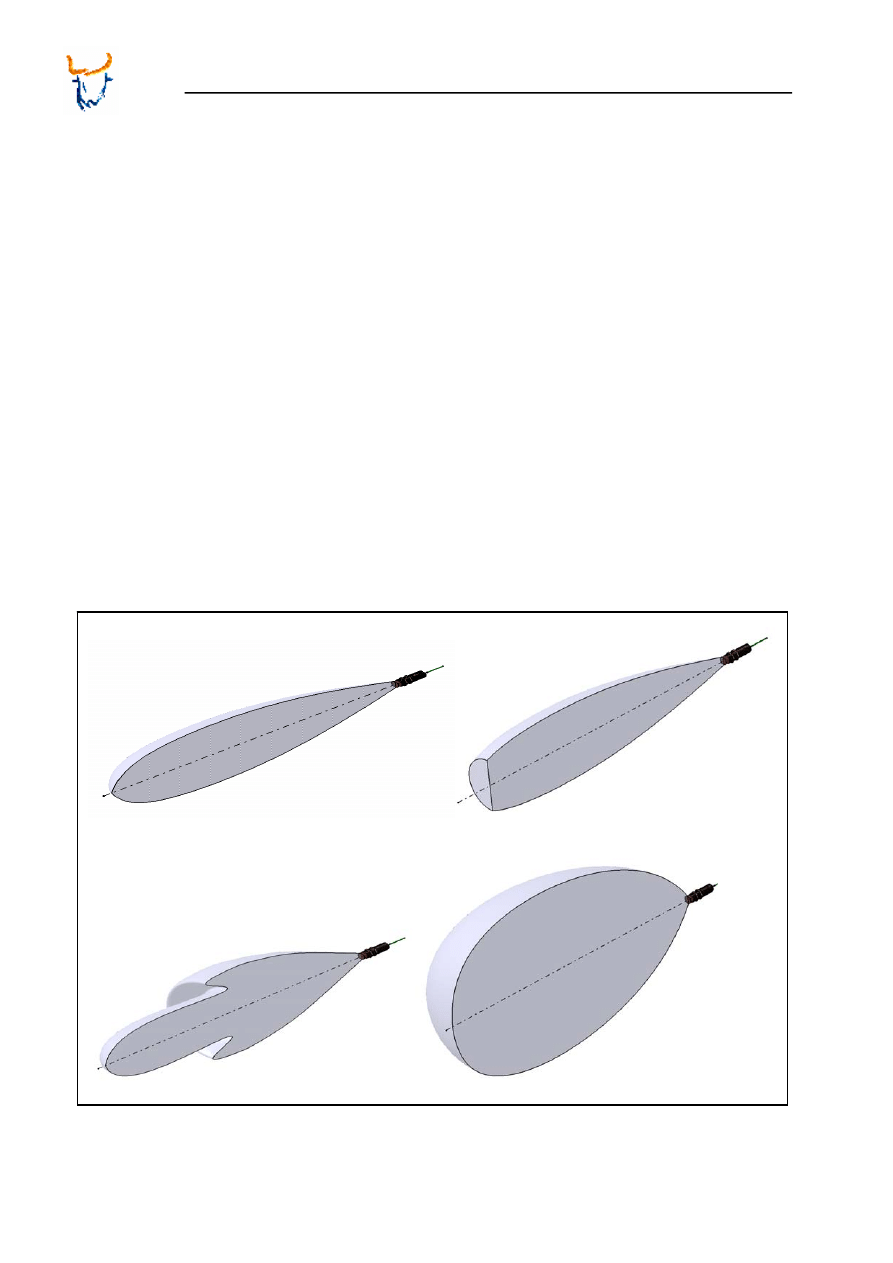
Komponenty mechatroniczne - Podręcznik
Minos
Stosownie do potrzeb wytwarzane są czujniki emitujące falę o różnych
kątach tego stożka. Są to kąty od kilku do kilkudziesięciu stopni. Za-
równo kąt jak i postać wiązki ultradźwiękowej jest określona przez
wielkość, kształt i częstotliwość drgającej powierzchni przetwornika.
Można zatem spotkać przetworniki generujące bardzo zróżnicowane
kształty wiązek, o których rozstrzygają parametry konstrukcyjne sa-
mych przetworników (rys. 3.11).
Rys. 3.11:
Przykładowe charakterystyki czujników
52
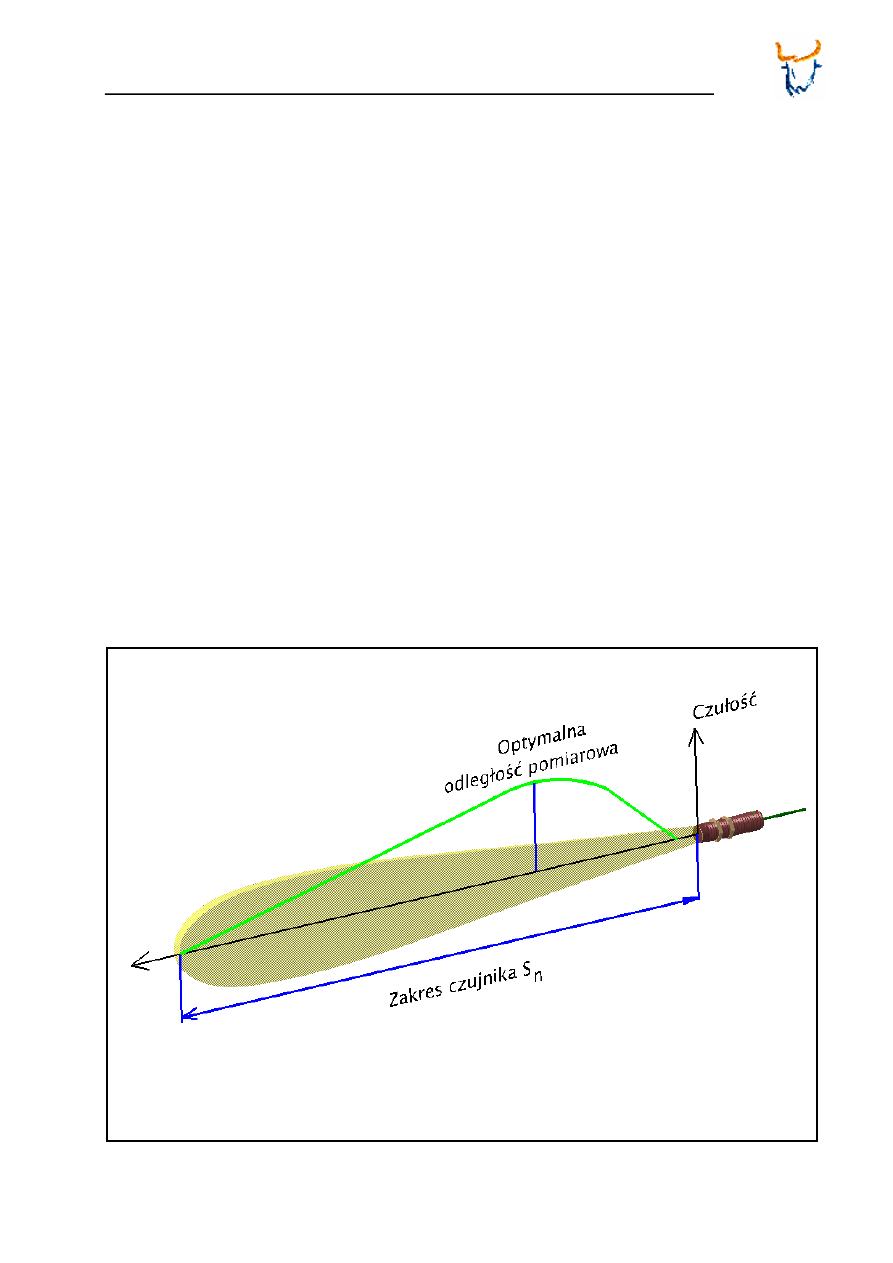
Komponenty mechatroniczne - Podręcznik
Minos
Czułość czujnika zmienia się wraz z oddalaniem się od źródła dźwię-
ku, czyli od czoła czujnika. Charakter tych zmian przedstawia Rys.
3.12. Na podstawie czułości można wyznaczyć optymalny obszar, w
którym wykrycie przedmiotu jest najbardziej pewne.
Rys. 3.12:
Zmiana czułości wraz z oddaleniem od czujnika
53
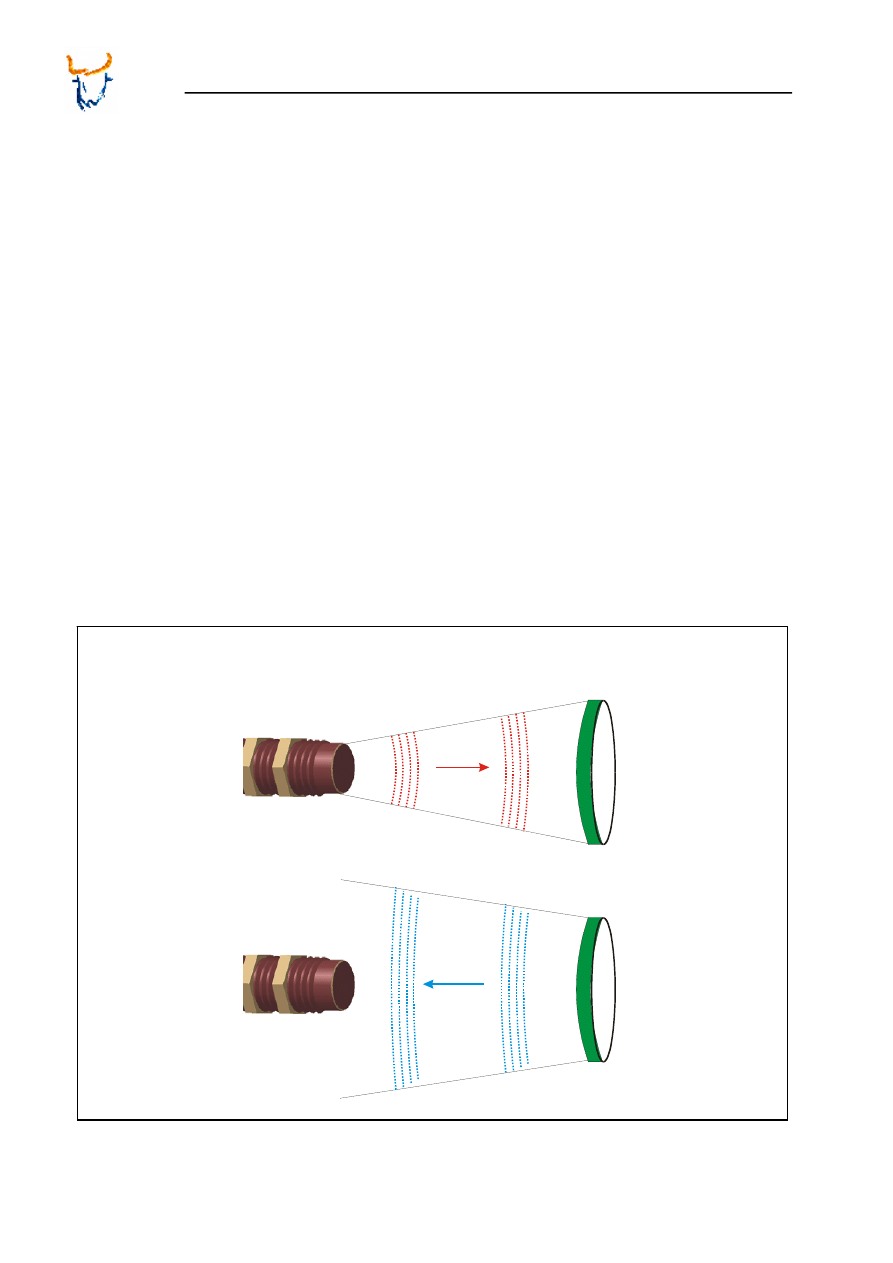
Komponenty mechatroniczne - Podręcznik
Minos
3.3
Zasada pracy
Typowe czujniki ultradźwiękowe pracują w jednym z dwóch trybów: dy-
fuzyjnym (diffuse sensor) i przelotowym (trough beam sensor). Odbicie
dyfuzyjne jest metodą najbardziej popularną dla czujników ultradźwię-
kowych. Odbita od przedmiotu fala dźwiękowa wraca z powrotem do
czujnika jako echo. Zależnie od zastosowanego typu wyjścia, wyzna-
czona na podstawie pomiaru czasu, odległość jest przekształcana na
prądowy lub napięciowy sygnał analogowy, lub na odpowiedni stan
wyjścia dwustanowego ON/OFF. Kiedy przedmiot opuści strefę pomia-
rową czujnika jego układ wyjściowy wraca do poprzedniego stanu. W
pomiarach ultradźwiękowych występują zatem dwie fazy (rys. 3.13):
- wysyłanie wiązki ultradźwiękowej przez przetwornik w kierunku
przedmiotu,
- wysyłanie wiązki ultradźwiękowej przez wykrywany przedmiot w kie-
runku przetwornika, przy czym w tym przypadku wiązka ta jest echem
sygnału z przetwornika.
W czujnikach dyfuzyjnych obydwie te funkcje spełnia najczęściej ten
sam przetwornik piezoelektryczny.
Przetwornik
w trybie nadawania
Przedmiot
Przetwornik
w trybie odbierania
Przedmiot
Rys. 3.13:
Dwie fazy występujące w pomiarach ultradźwiękowych: a) tryb nadawania sygna-
łu, b) tryb odbierania sygnału
54
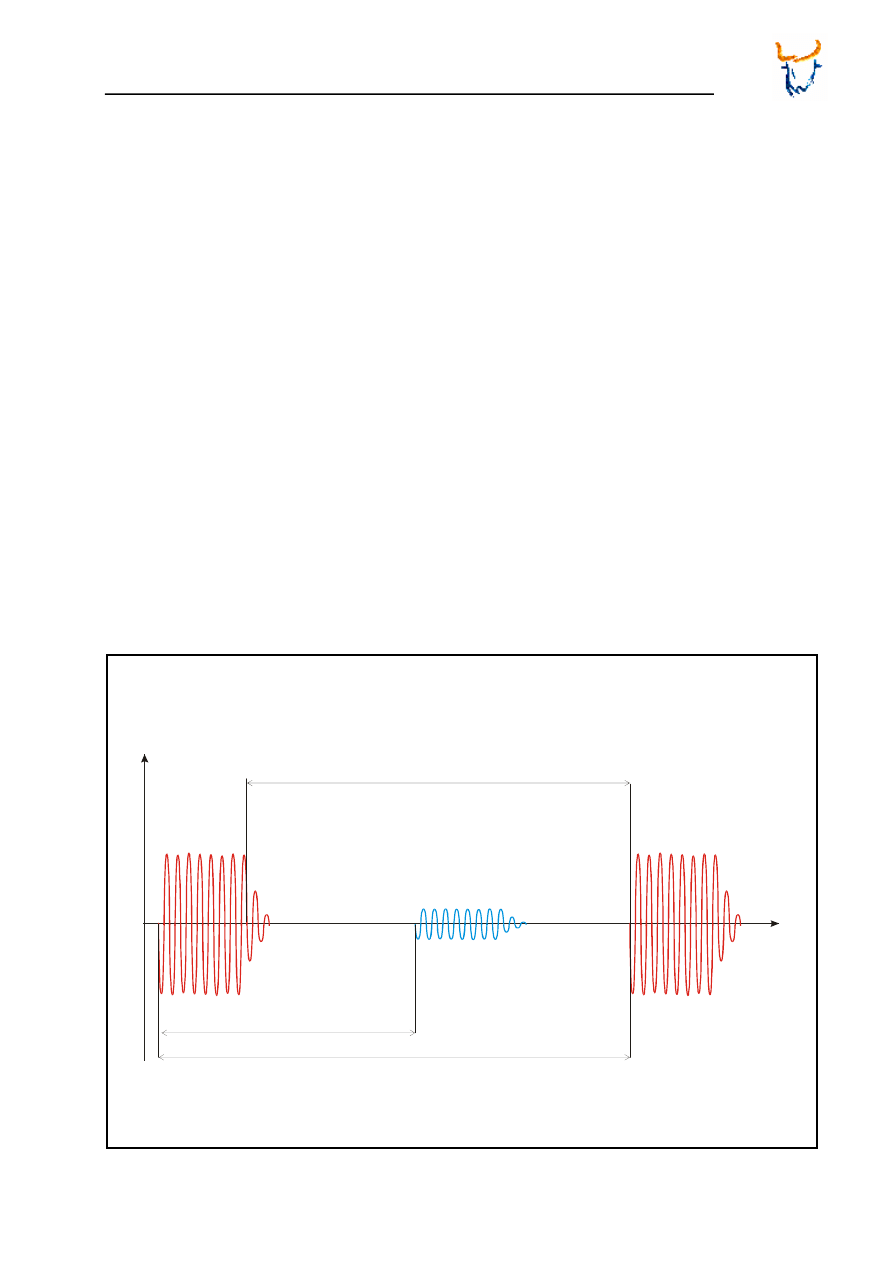
Komponenty mechatroniczne - Podręcznik
Minos
Czułość czujnika jest tym lepsza im większa jest gęstość przedmiotu
wykrywanego, gdyż większa część fali dźwiękowej jest odbijana. Z te-
go powodu czujniki ultradźwiękowe są szczególnie przydatne do wy-
krywania przedmiotów o wysokim akustycznym współczynniku odbicia.
Takim współczynnikiem odbicia odznaczają się materiały stałe, płynne,
lub media typu granulat.
W czujnikach dyfuzyjnych generowane są cyklicznie impulsy dźwięko-
we. Odstęp czasu między wygenerowaniem impulsu dźwiękowego a
zarejestrowaniem echa odbitego od przedmiotu jest proporcjonalny do
aktualnej odległości między przedmiotem i czujnikiem. Dla czujników,
w których przetwornik pełni podwójną rolę tj. generuje i odbiera fale ul-
tradźwiękowe, czas trwania impulsu T
i
musi być wyraźnie krótszy od
czasu potrzebnego na powrót echa T
e
(rys.3.14) Impulsy te są powta-
rzane cyklicznie z częstotliwością kilkudziesięciu Hz. Oczekiwanie na
powracające echo rozpoczyna się po wysłaniu impulsu i trwa aż do
wysłania następnego impulsu. Mierząc zatem czas T
e
, po jakim echo
powróci do czujnika, można wyznaczyć odległość przedmiotu, od któ-
rego echo zostało odbite. W czujnikach detekcyjnych pojawienie się
echa oznacza natomiast wykrycie przedmiotu w polu działania czujnika
i powoduje przełączenie stanu wyjścia czujnika.
Amplituda
Czas
Czas cyklu
e
Czas powrotu echa T
Czas oczekiwania
na sygnał powrotny
Sygnał
odbity
Czas trwania
impulsu T
i
Czas trwania
impulsu T
i
55
Rys. 3.14:
Cykl pracy czujnika ultradźwiękowego
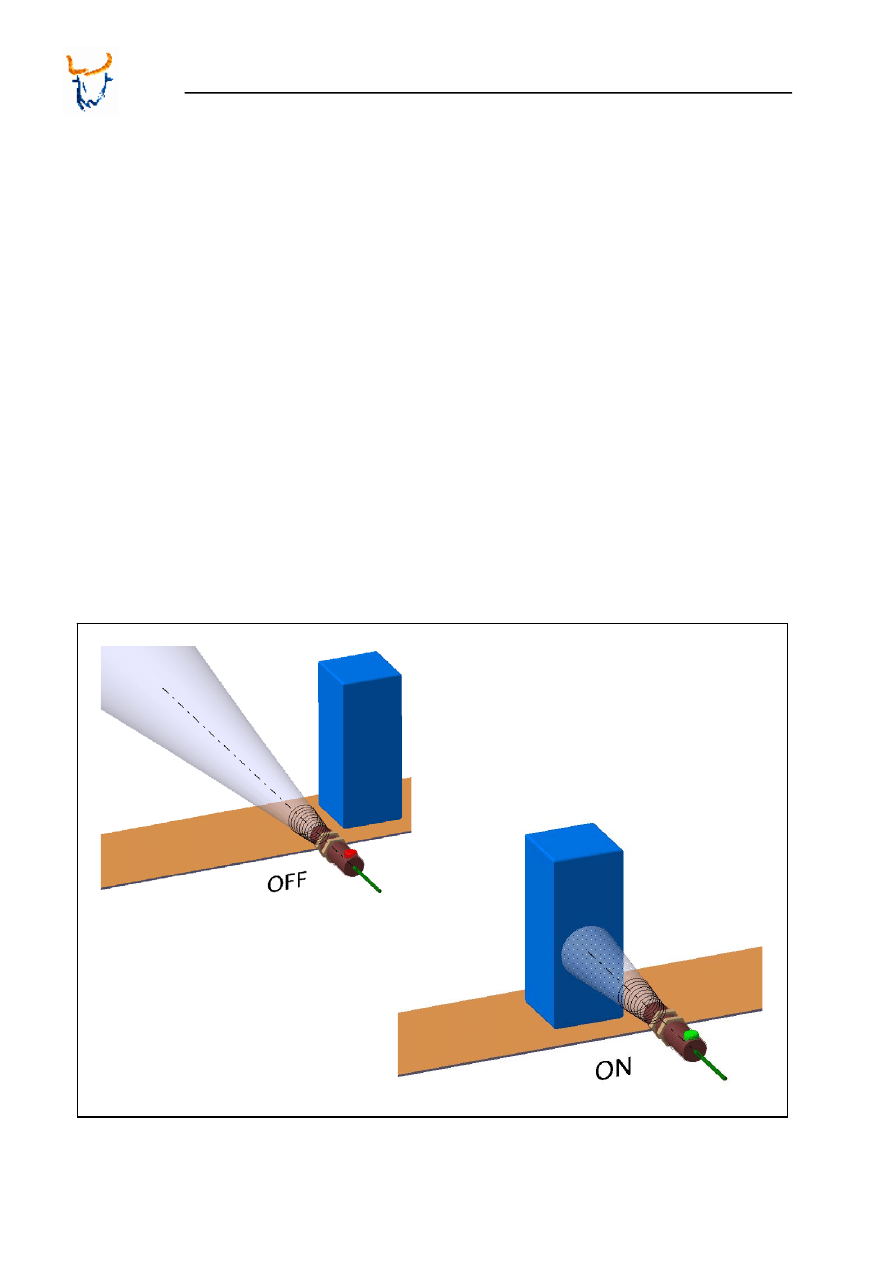
Komponenty mechatroniczne - Podręcznik
Minos
3.3.1
Tryb dyfuzyjny
Ultradźwiękowe czujniki dyfuzyjne wykorzystują specjalny przetwornik,
sterowany układem elektronicznym, generujący i odbierający
impulsową falę dźwiękową. Przetwornik emituje serię impulsów
ultradźwiękowych, w czasie od kilku mikrosekund do 1ms i oczekuje
na ich powrót po odbiciu od wykrywanego przedmiotu. Wyłączony stan
wyjścia OFF (rys. 3.15a) zmienia się na stan załączony ON, gdy w
polu stożkowej wiązki ultradźwiekowej pojawi się powierzchnia
odbijajaca dźwięk (rys. 3.15b).
b)
a)
Rys.3.15:
Stan wyjścia czujnika dyfuzyjnego: a) przed wykryciem przedmiotu.
b) po wykryciu przedmiotu
56
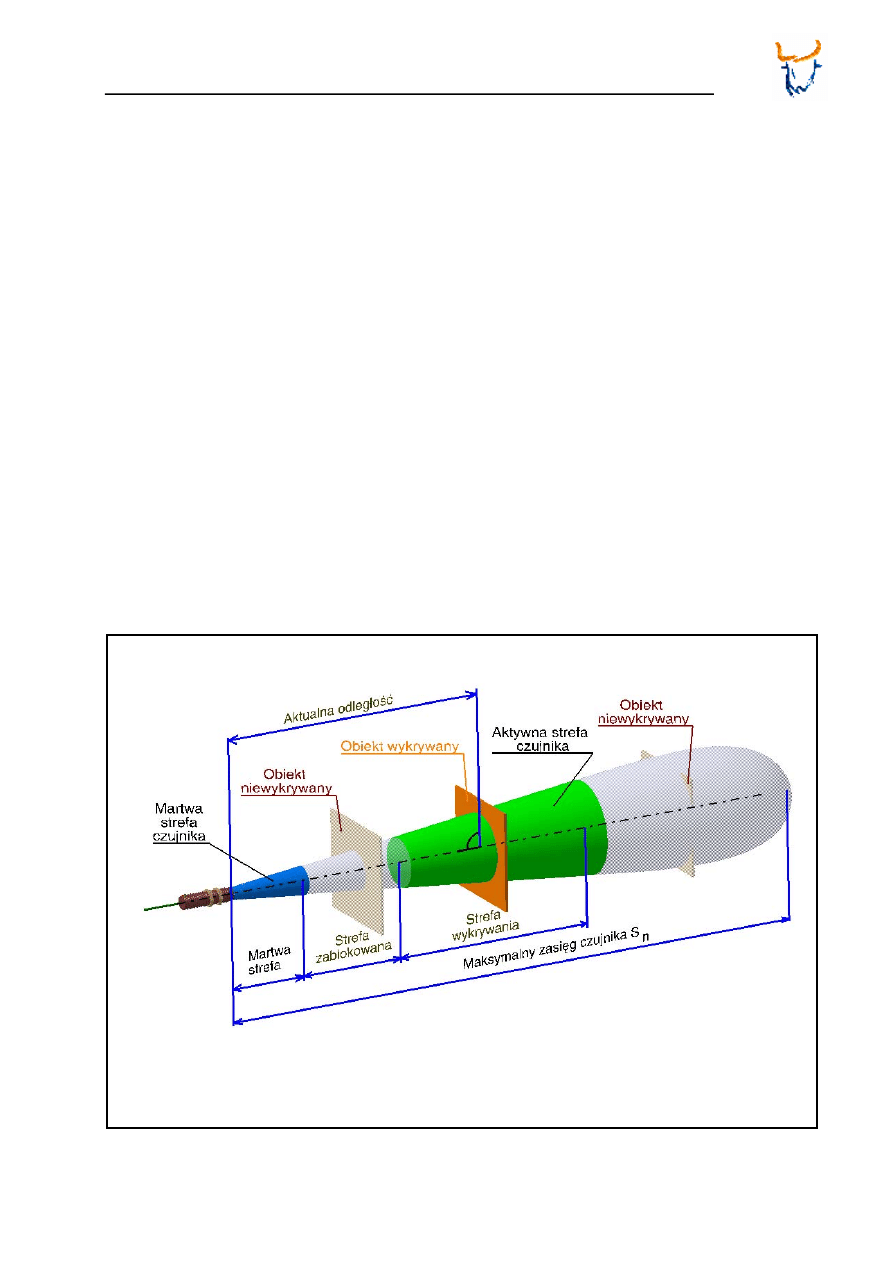
Komponenty mechatroniczne - Podręcznik
Minos
Maksymalny zasięg czujnika może być ograniczany za pomocą od-
powiedniego potencjometru. Dzięki temu przedmioty umieszczone po-
za tym ograniczeniem nie są wykrywane (rys.3.16). W ten sposób re-
alizowana jest funkcja wygaszania tła (blanking out the background).
Możliwość nastawiania dolnej granicy zasięgu mają tylko niektóre od-
miany czujników. Uzyskuje się wówczas dodatkowo strefę zabloko-
waną, pozwalającą bardzo precyzyjnie zdefiniować strefę aktywną, w
której przedmioty będą wykrywane. Zdefiniowanie strefy zablokowanej
zapobiega wykryciu przedmiotu znajdującego się w tej strefie.
W pobliżu czoła czujnika występuje martwa strefa, w której również
przedmioty nie są wykrywane, lub ewentualne ich wykrycie nie jest
wiarygodne. Wielkość martwej strefy zależy od zasięgu i wielkości
czujnika. Krótsze czujniki o małym zasięgu będą miały mniejsze
martwe strefy niż czujniki o wiekszym zasięgu.
Istnienie martwej strefy jest wynikiem pełnienia przez przetwornik
zarówno funkcji generatora dźwięku jak i odbiornika. Przetwornik jest
gotowy do odbierania echa dopiero po zakończeniu wysyłania impulsu
dźwiekowego.
57
Rys. 3.16:
Definiowanie strefy wykrywania przez określenie górnej i dolnej granicy zakresu
pracy czujnika
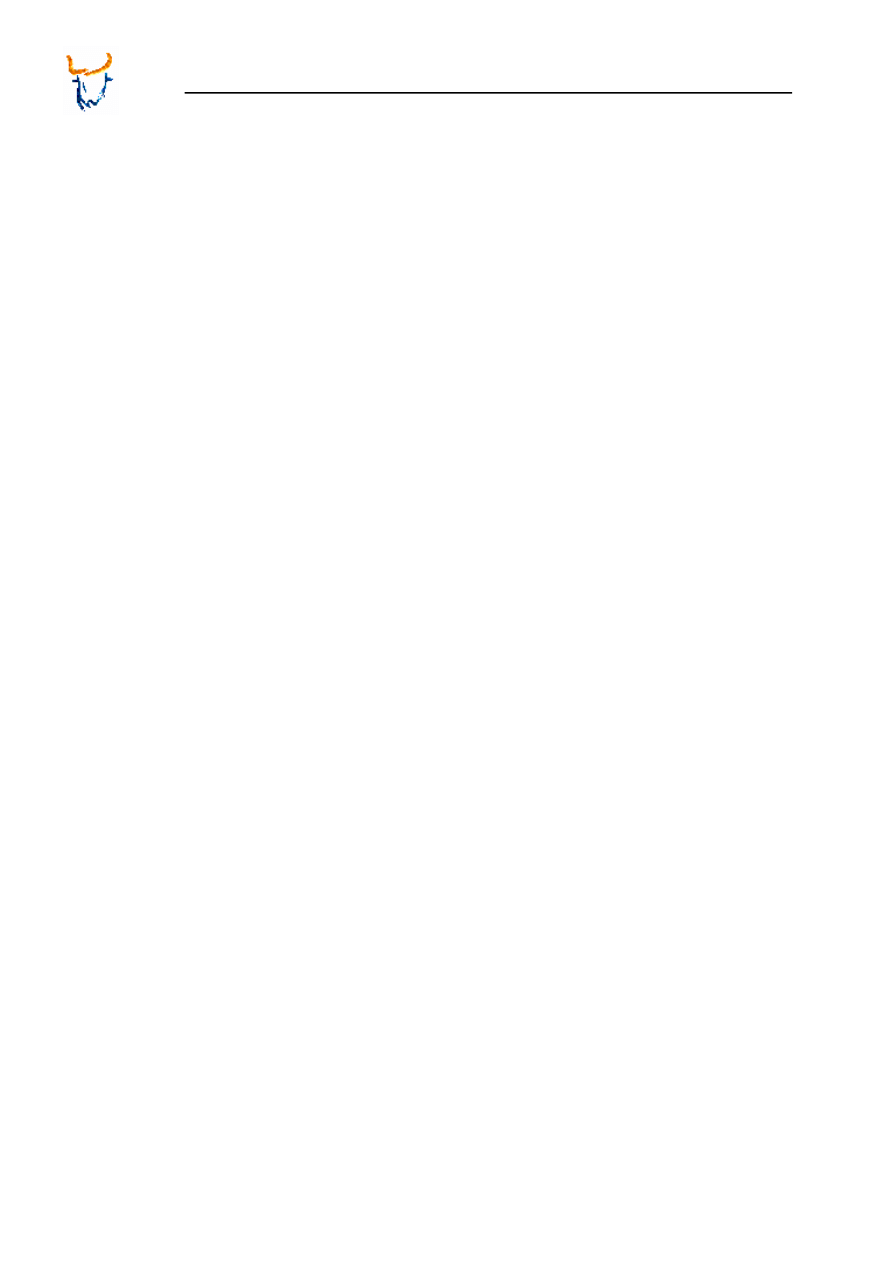
Komponenty mechatroniczne - Podręcznik
Minos
58
W zależności od przeznaczenia wytwarzane są czujniki o bardzo
zróżnicowanych kątach stożka wiązki ultradźwiekowej od 3 do
kilkudziesięciu stopni. Kąt ten powinien być dobierany tak, aby objąć
pożądany fragment wykrywanej powierzchni, niechciane zaś cele aby
były ignorowane.
Standardowym przedmiotem jest metalowa płytka kwadratową o
grubości 1 mm odbijajaca falę ultradźwiekową. Używana jest ona do
ocenny zakresu działania czujnika Sn. Płytka ta powinna być
ustawiona pionowo do osi fali dźwiękowej. Jej wielkość zależy od
zasięgu czujnika i tak: dla czujników o krótkim zasiegu do 300mm
może to być płytka o boku 10mm, a dla czujników o zasiegu powyżej
800mm płytka o boku 100mm. Przedmioty o innych wymiarach,
kształtach oraz własnościach mogą nie gwarantować uzyskania w
pomiarach katalogowych wartości zakresu wykrywania S
n
.
Ogólnie obowiązują zasady:
- niższa częstotliwość sensora, to dłuższy zasięg wykrywania,
- wyższe częstotliwości pracy, to większa rozdzielczość pomiaru i
mniejsza podatność na szum drugoplanowy.
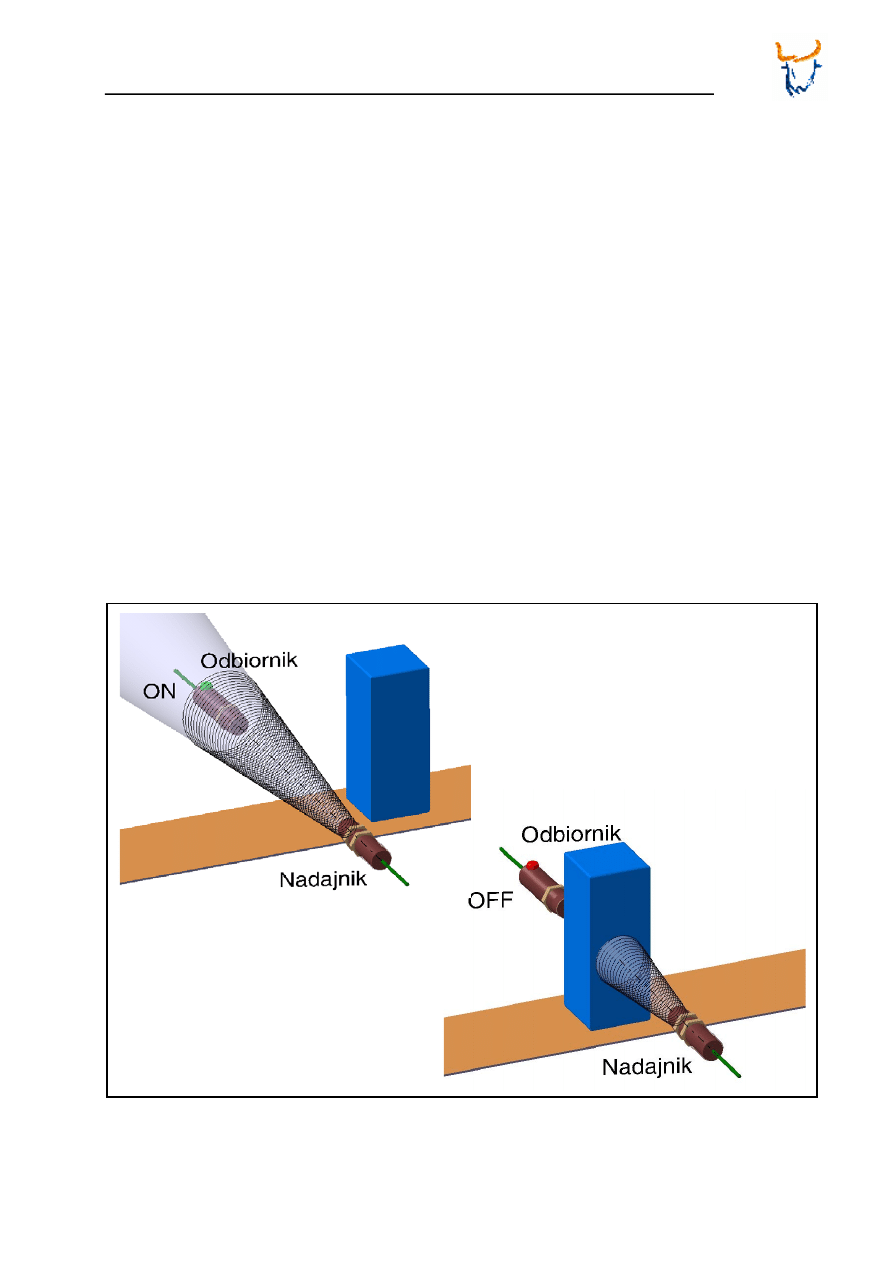
Komponenty mechatroniczne - Podręcznik
Minos
3.3.2
Tryb przelotowy
W czujnikach przelotowych przetwornik ultradźwiękowy generuje falę
dźwiękową w kierunku odbiornika umieszczonego w niezależnej
obudowie. Przedmiot przerywając falę dźwiękową powoduje
przełączenie wyjścia czujnika (rys.3.17).
W przelotowych czujnikach ultradźwiękowych, w przeciwieństwie do
czujników dyfuzyjnych i refleksyjnych, przetwornik generuje ciągłą falę
dźwiękową i nie występuje tutaj tzw. martwa strefa.
a)
b)
Rys.3.17:
Stan wyjścia czujnika przelotowego: a) przed wykryciem przedmiotu. b) po wykry-
ciu przedmiotu
59
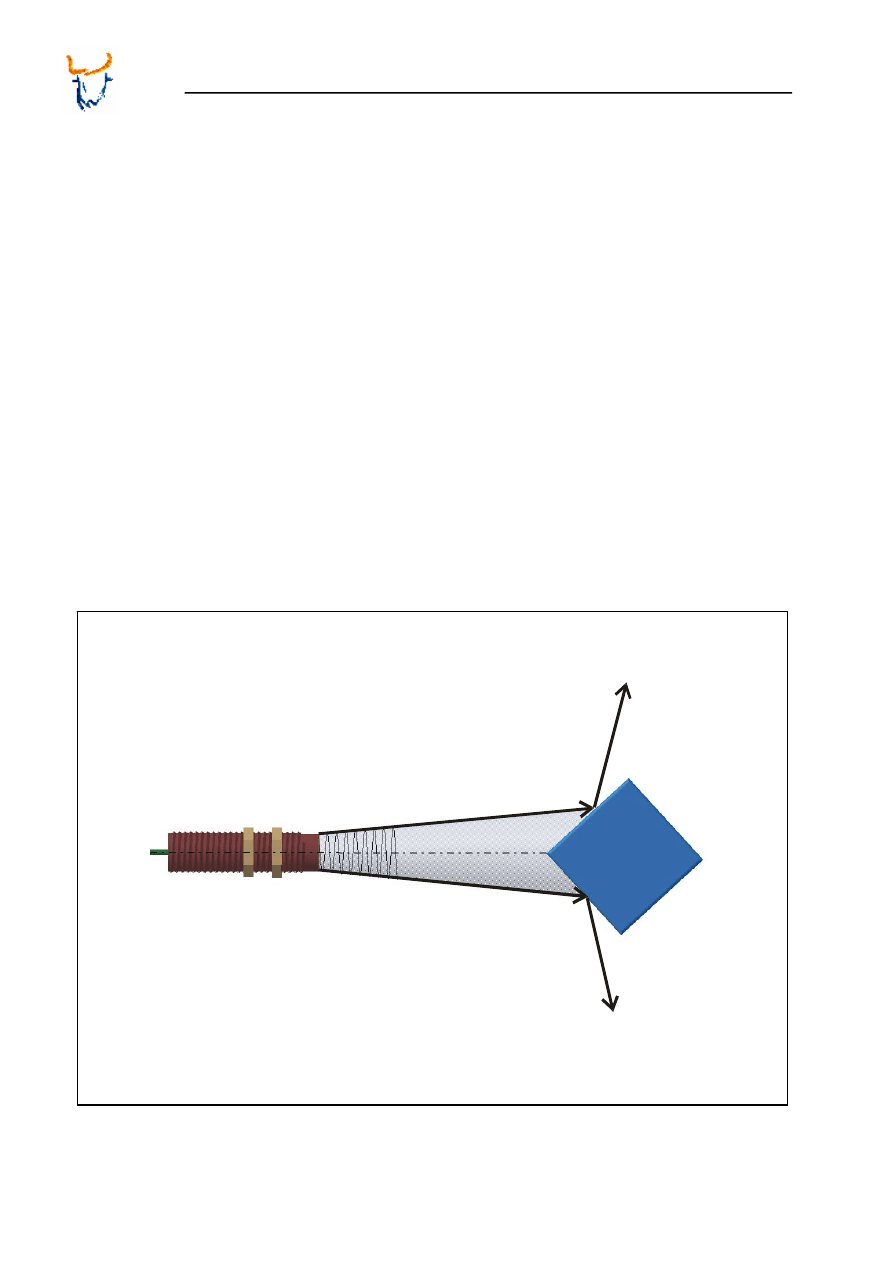
Komponenty mechatroniczne - Podręcznik
Minos
Te czujniki znajdują zastosowanie do wykrywania nie tylko
przedmiotów odbijających dźwięk, ale zwłaszcza do wykrywania
przedmiotów porowatych rozpraszajacych lub pochłaniajacych dźwięk,
a także przedmiotów o kształtach trudnych do wykrycia przez czujniki
dyfuzyjne.
Przedmioty o powierzchniach dobrze odbijających fale dzwiekowe lecz
położonych względem osi czujnika nawet tak jak pokazuje rys.3.18,
skutecznie przerywają wiązkę ultradźwiekową i mogą być łatwo
wykryte przez czujnik przelotowy. Posłużenie się w takim przypadku
czujnikiem dyfuzyjnym nie pozwoli na wykrycie takiego przedmiotu.
Kierunek wiązki odbitej zbyt dużo bowiem odbiega od osi czujnika.
Czestotliwość przełączeń stanu wyjścia czujników przelotowych jest
wyższa niż dyfuzyjnych i może osiągać do 200 Hz.
PRZEDMIOT
Kierunek
wiązki odbitej
Kierunek
wiązki odbitej
Rys. 3.18:
Przykład kształtu przedmiotu trudnego do wykrycia przez czujnik dyfuzyjny, a wy-
krywanego przez czujnik przelotowy
60

Komponenty mechatroniczne - Podręcznik
Minos
61
3.4
Zakłócenia pracy czujników
3.4.1
Czynniki fizyczne
Poprawna praca czujnika może zostać zakłócona przez:
- Prądy powietrzne, które mogą zmienić prędkość lub kierunek fali
akustycznej na tyle, że przedmiot nie zostanie wykryty lub źle zostanie
wyznaczona jego odległość od czujnika.
- Zmiany ciśnienia powietrza, przy czym normalne atmosferyczne
zmiany ciśnienia powietrza w granicach ± 5 %, mogą spowodować
zmianę zakresu działania czujnika do około ± 0.6 %.
- Przyrosty temperatury w strefie działania czujnika, przez przed-
miot emitujący znaczne ilości ciepła może utworzyć strefę o zmiennej
temperaturze, która zmienia czas propagacji fali i w ten sposób zmniej-
sza pewność działania czujnika. Wzrost temperatury i wilgotności
może spowodować, że odległość przedmiotu będzie wykrywana jako
mniejsza. Gorące powierzchnie odbijają kierunkową falę dźwiękową w
mniejszym stopniu niż przedmioty zimne. Temperatura powietrza i jego
wilgotność wpływaja na czas trwanie impulsu dźwiękowego. Wzrost
temperatury powietrza o 20°C prowadzi do wzrostu zakresu czujnika o
kilka procent (3,5% do 8%) i odczytywana odległość przedmiotu jest
wtedy zaniżona.
- Izolatory dźwięku, dla których pochłanianie dźwięku przez niektóre
materiały (bawełna, tkaniny, guma, etc.), zmniejsza czułość czujnika,
która w przypadku czujnika dyfuzyjnego może okazać się niewystar-
czająca do wykrycia obiektu.
3.4.2
Czynniki montażowe
Czujniki ultradźwiękowe są szczególnie przydatne do wykrywania
twardych przedmiotów z płaską powierzchnią, prostopadłą do osi wy-
krywania. Wszystkie odstępstwa od tego mogą być przyczyną zakłó-
ceń pracy czujnika i tak:
- Kątowe położenie czoła przedmiotu względem osi odniesienia
czujnika. Kiedy kąt odbiega od 90°, fala odbita już nie wraca wzdłuż
osi czujnika, przez co zmniejsza się odległość wykrywania czujnika dy-
fuzyjnego. Jest to ważne zwłaszcza przy dużych zakresach pomiaro-
wych, kiedy to skręcenie obiektu nawet o 3° może być powodem jego
niewykrycie. Dla małych zakresów pomiarowych, czystych i niewielkich
przedmiotów dopuszczalne jest odchylenie nawet do 10°.
- Kształt przedmiotu. Przedmioty o powierzchniach usytuowanych
tak, że kierunek fali odbitej znacznie odbiega od osi fali emitowanej są
możliwe do wykrycia czujnikami pracującymi w trybie przelotowym lub
refleksyjnym.
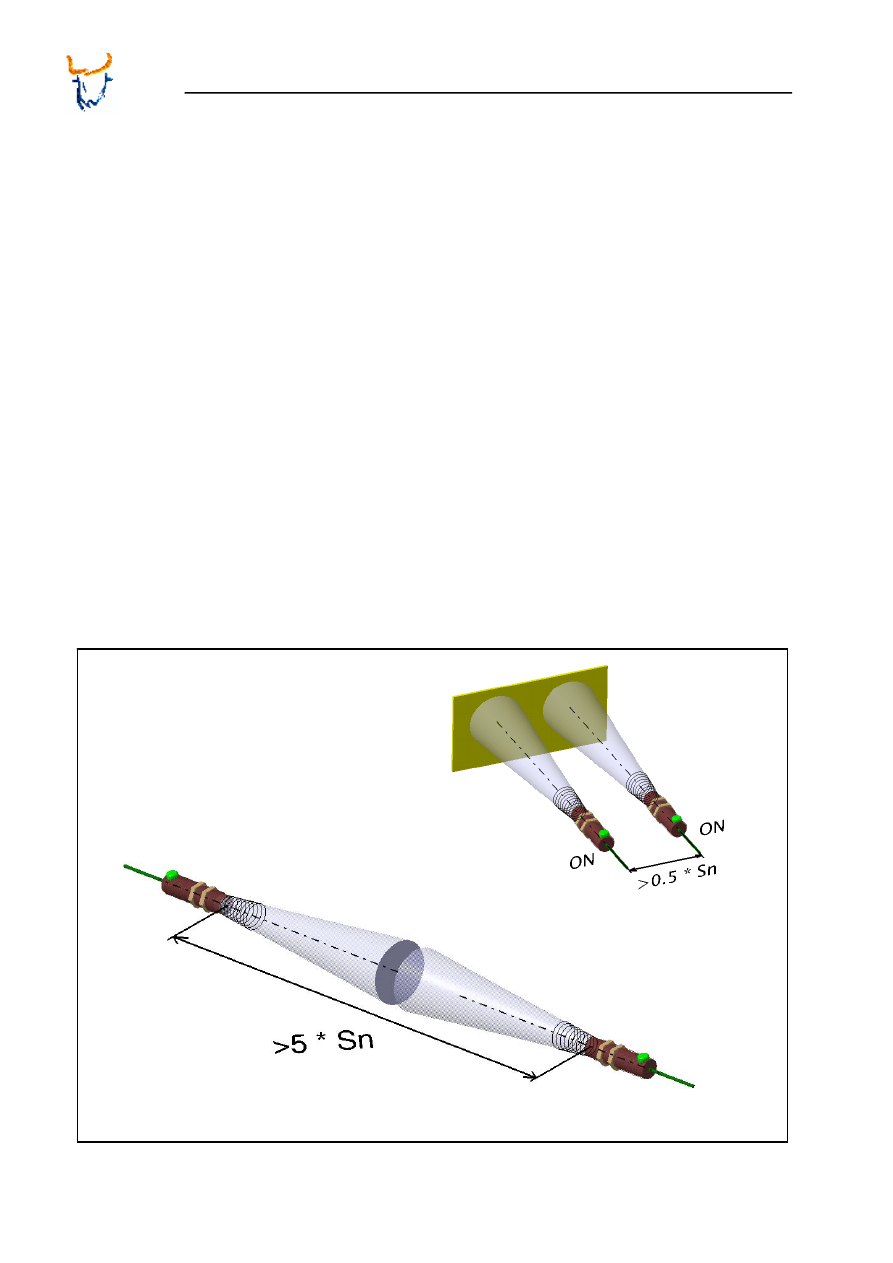
Komponenty mechatroniczne - Podręcznik
Minos
- Powierzchnie płynów. Współczynnik odbicia fal ultradźwiekowych
od powierzchni płynnych jest taki sam jak dla ciał stałych. Łatwe do
wykrycia są wyrównane (niepofalowane) powierzchnie płynne.
- Wzajemne oddziaływania czujników. Jeśli czujniki montowane są
zbyt blisko siebie, to odbita fala dźwiękowa, wyemitowana przez jeden
czujnik, może dotrzeć do drugiego i wywołać w nim nieuzasadnione
przełączenie wyjścia. Aby tego uniknąć, konieczne jest, przestrzeganie
zalecanych minimalnych odległości między czujnikami (rys.3.19).
Rys. 3.19:
Zalecane odległości między czujnikami aktywnymi w tym samym czasie
62
Komponenty mechatroniczne - Podręcznik
Minos
3.4.3 Synchronizacja
czujników
Zsynchronizowanie dwóch lub większej liczby czujników, przez odpo-
wiednie połączenie ich wyjść, pozwala na montowanie ich nawet bar-
dzo blisko siebie, bez powodowania wzajemnej interferencji. Synchro-
nizacja zalecana jest wtedy, gdy czujniki emitują fale w tym samym
kierunku i wiązki ultradźwiękowe czujników częściowo się pokrywają.
Gdy włączona jest synchronizacja, wykrywany obiekt może znajdować
się przed włączonym czujnikiem i jednocześnie przed innym z nim
zsynchronizowanym. Dla przykładu z rys. 3.20, gdzie czujniki zamon-
towane są blisko siebie, do czujnika B docierają dwa echa B1 i Ax.
Echo A1 dociera jednak szybciej do czujnika A niż echo Ax i B1 do
czujnika B. Synchronizacja czujników sprawia, że czujniki reagują tylko
na pierwsze echo A1, co pozwala uniknąć wpływu innych przenikają-
cych się wiązek ultradźwiękowych na pracę czujników. Zsynchronizo-
wane czujniki wysyłają sygnały jednocześnie i funkcjonują jak jeden
czujnik o rozszerzonym stożku akustycznym, wykrywający ten sam
przedmiot.
Rys.3.20:
Synchronizacja dwóch czujników umieszczonych blisko siebie i wykrywających ten
sam przedmiot
63
Komponenty mechatroniczne - Podręcznik
Minos
3.5
Specjalne czujniki ultradźwiekowe
3.5.1
Czujnik refleksyjny
Ultradźwiękowe czujniki refleksyjne (retro reflective sensors) bazują na
różnicy pomiędzy czasem powrotu fali dźwiękowej odbitej od
wykrywanego przedmiotu a czasem powrotu fali od reflektora. Rolę
reflektora może pełnić dowolna płaska i twardą powierzchnia. Fala
dźwiękowa odbita od przedmiotu musi wrócić do czujnika w ustalonym
czasie, krótszym niż odbita od reflektora. Nastąpi wówczas
przełączenie stanu wyjścia czujnika (rys.3.21b).
a)
b)
Rys.3.21: Stan
wyjścia czujnika refleksyjnego: a) przed wykryciem. b) po wykryciu przedmio-
tu dobrze odbijającego dźwięk
64
Komponenty mechatroniczne - Podręcznik
Minos
Czujniki te mogą też wykrywać całkowite przerwanie wiązki przez
przedmioty pochłaniajace lub odbijające dźwięk w innym kierunku
(rys.3.22). Przerwanie wiązki, czyli wykrycie przedmiotu, powoduje
również przełączenie stanu wyjścia na OFF.
Ten rodzaj czujnika jest szczególnie przydatny do wykrywania takich
materiałów jak: bawełna, pianka, materiały tekstylne - pochłaniających
w znacznym stopniu dźwięk, oraz do wykrywania powierzchni
nieprostopadłych do osi czujnika.
a)
b)
Rys.3.22:
Przerwanie odbitej wiązki ultradźwiekowej: a) przez obiekt o powierzchni
odbijającej fale dźwiekowe, b) przez obiekt pochłaniający dźwięk
65
Komponenty mechatroniczne - Podręcznik
Minos
Czujniki refleksyjne mogą do wykrywania predmiotów wykorzystywać
też odbitą falę ultradźwiekową np. od dowolnej twardej i gładkiej
powierzchni. Jest to szczególnie przydatne w miejscach o utrudnionym
dostępie (rys. 3.23). Czujniki mogą w tym układzie pracować zarówno
na zasadzie całkowitego przerwania wiązki jak i odbicia echa.
Rys. 3.23:
Wykorzystanie odbitej fali ultradźwiękowej do wykrycia czujnikiem refleksyjnym
przedmiotów pochłaniających
66
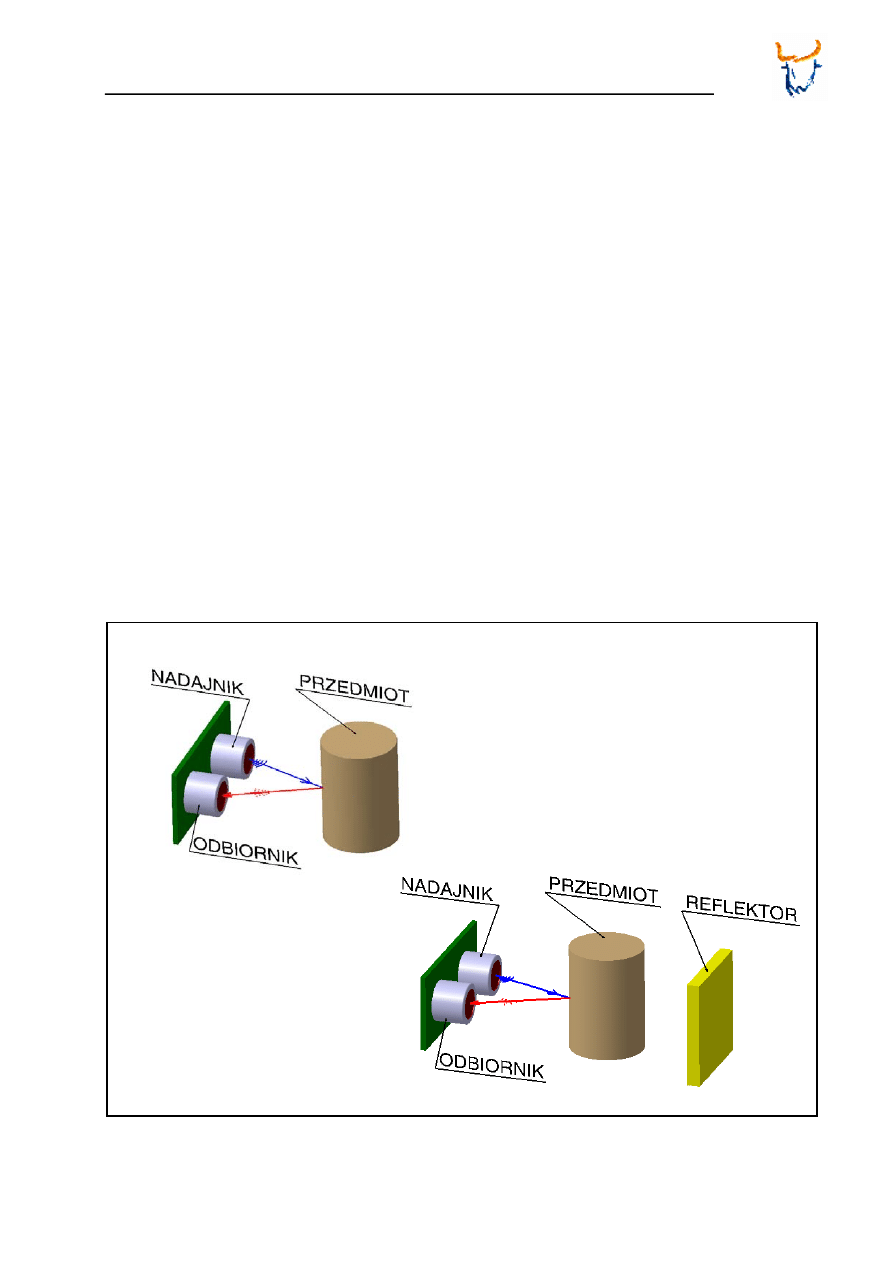
Komponenty mechatroniczne - Podręcznik
Minos
3.5.2
Czujniki z dwoma przetwornikami w jednej obudowie
Czujniki z dwoma przetwornikami w jednej obudowie mogą pracować
w trybie dyfuzyjnym i trybie refleksyjnym z reflektorem (rys.3.24). Je-
den z przetworników pełni funkcje nadajnika a drugi odbiornika fali ul-
tradźwiękowej.
Pozwalają one wykrywać niewielkie przedmioty z bardzo małej odle-
głości, ponieważ odbiornik nie musi oczekiwać na zakończenie wysy-
łania impulsu generowanego przez nadajnik. Wymagana jest jednak
synchronizacja pracy obydwu przetworników.
a)
b)
Rys. 3.24:
Czujnik z dwoma przetwornikami: a) tryb dyfuzyjny, b) tryb refleksyjny
67
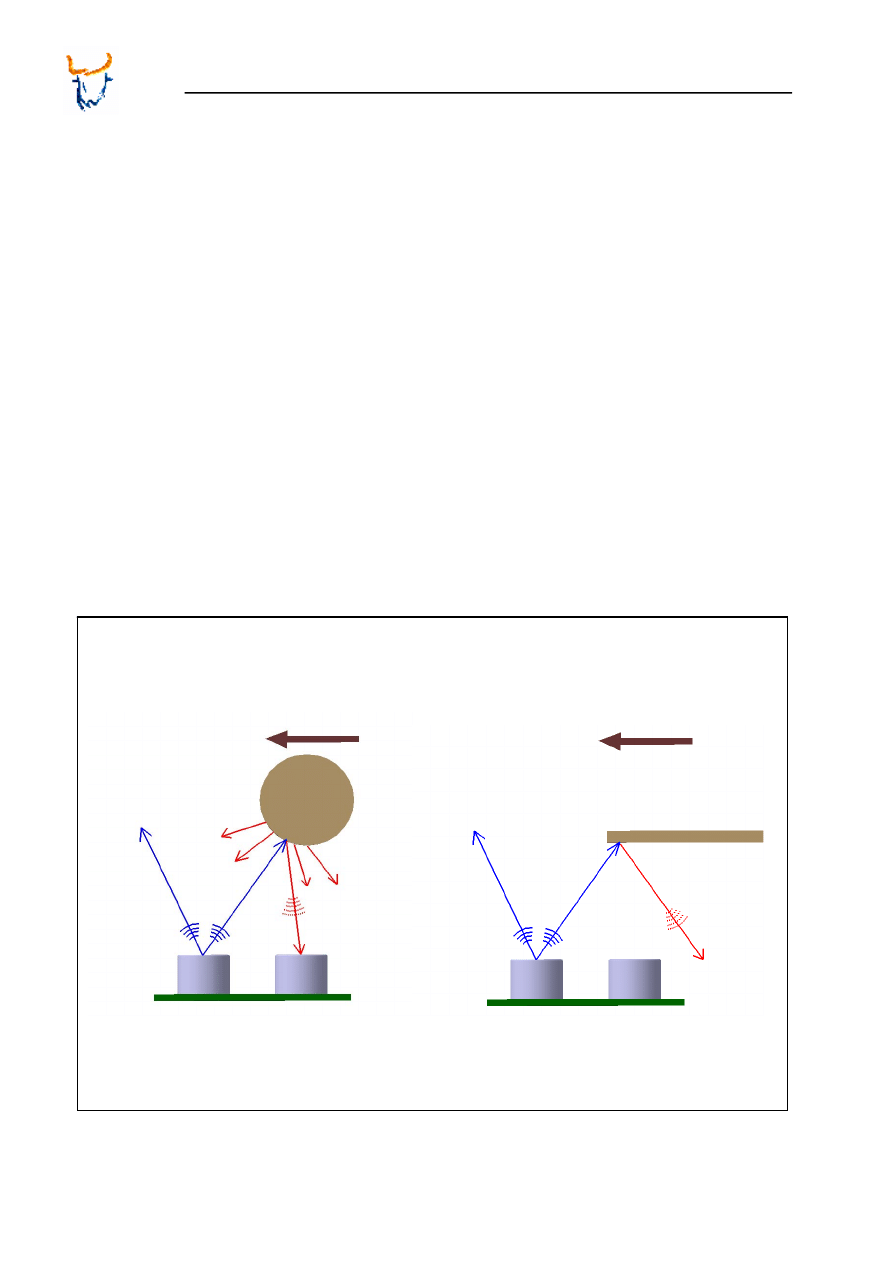
Komponenty mechatroniczne - Podręcznik
Minos
Przedmioty walcowe mogą być wykrywane znacznie wcześniej od
przedmiotów płaskich. Przy płaskich przedmiotach odbite echo bardzo
łatwo wykracza poza strefę działania odbiornika (rys. 3.25).
Rys. 3.25:
Wykrywanie przedmiotów o walcowej i płaskiej powierzchni
68
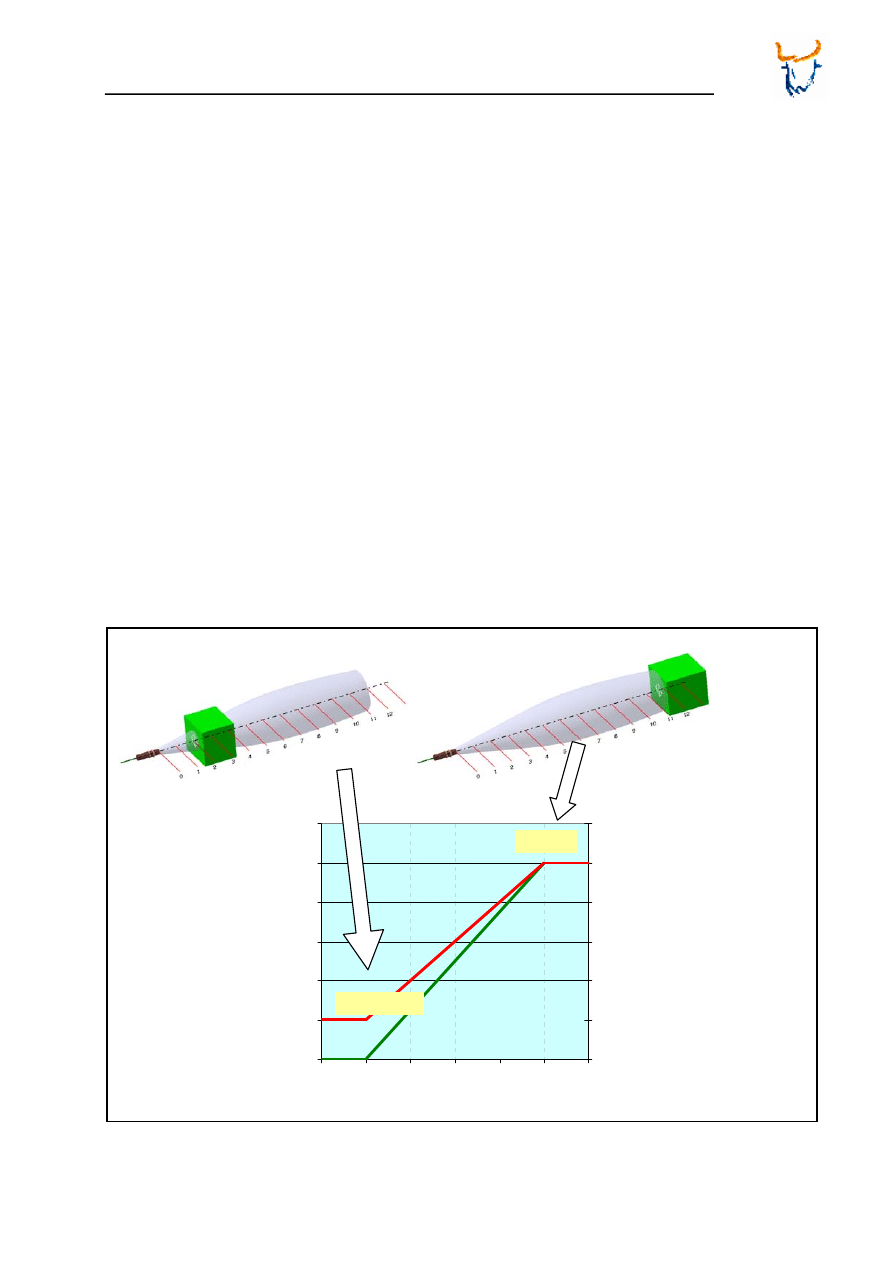
Komponenty mechatroniczne - Podręcznik
Minos
3.6
Czujniki z wyjściem analogowym
Większość czujników ultradźwiękowych wyposażona jest zarówno w
wyjścia dwustanowe jak i analogowe. Gdy zadaniem czujnika są po-
miary odległości wykorzystywane jest wyjście napięciowe lub prądowe.
Wielkość napięcia lub prądu wyjściowego jest proporcjonalna do mie-
rzonej odległości (rys. 3.26).
0
2
4
6
8
10
12
0
2
4
6
8
10
12
Zakres pomiarowy
U
[ V ]
0
4
8
12
16
20
24
I
[ mA ]
I
U
Początek
Koniec
Rys. 3.26:
Zmiany sygnału wyjściowego spowodowane zmianą odległości przedmiotu
69
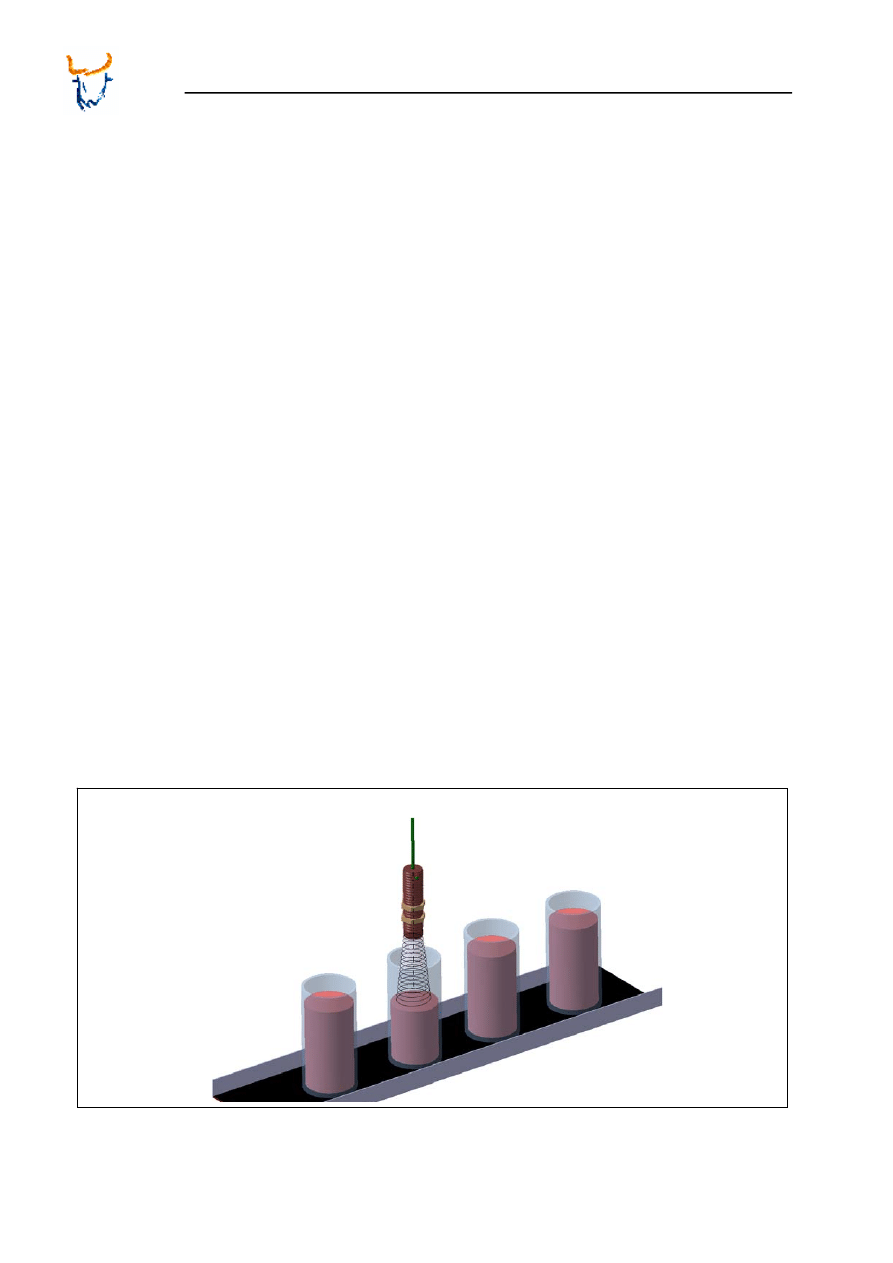
Komponenty mechatroniczne - Podręcznik
Minos
3.7
Aplikacje
Czujniki ultradźwiękowe mają szerokie zastosowanie w praktyce. Ce-
chuje je bowiem duża odporność na zakłócenia w strefie pomiarowej i
na zabrudzenia elementów czujnika. Pozwalają zdalnie wykryć, różno-
rodne przedmioty bez względu na ich:
- materiał (metal, plastik, drewno, tektura, etc.),
- naturę (stały, płynny, granulat etc.),
- kolor
- stopień przezroczystości.
W zastosowaniach przemysłowych mogą one służyć np. do obserwo-
wania:
- pozycji zespołu maszyny,
- strumieni przedmiotów na taśmie przenośnika,
- poziomu cieczy o różnych kolorach w naczyniach,
- poziomu granulatu w zasobnikach.
Rys. 3.27:
Czujnik ultradźwiękowy dyfuzyjny do wykrywania poprawnego poziomu cieczy w
pojemnikach szklanych
70
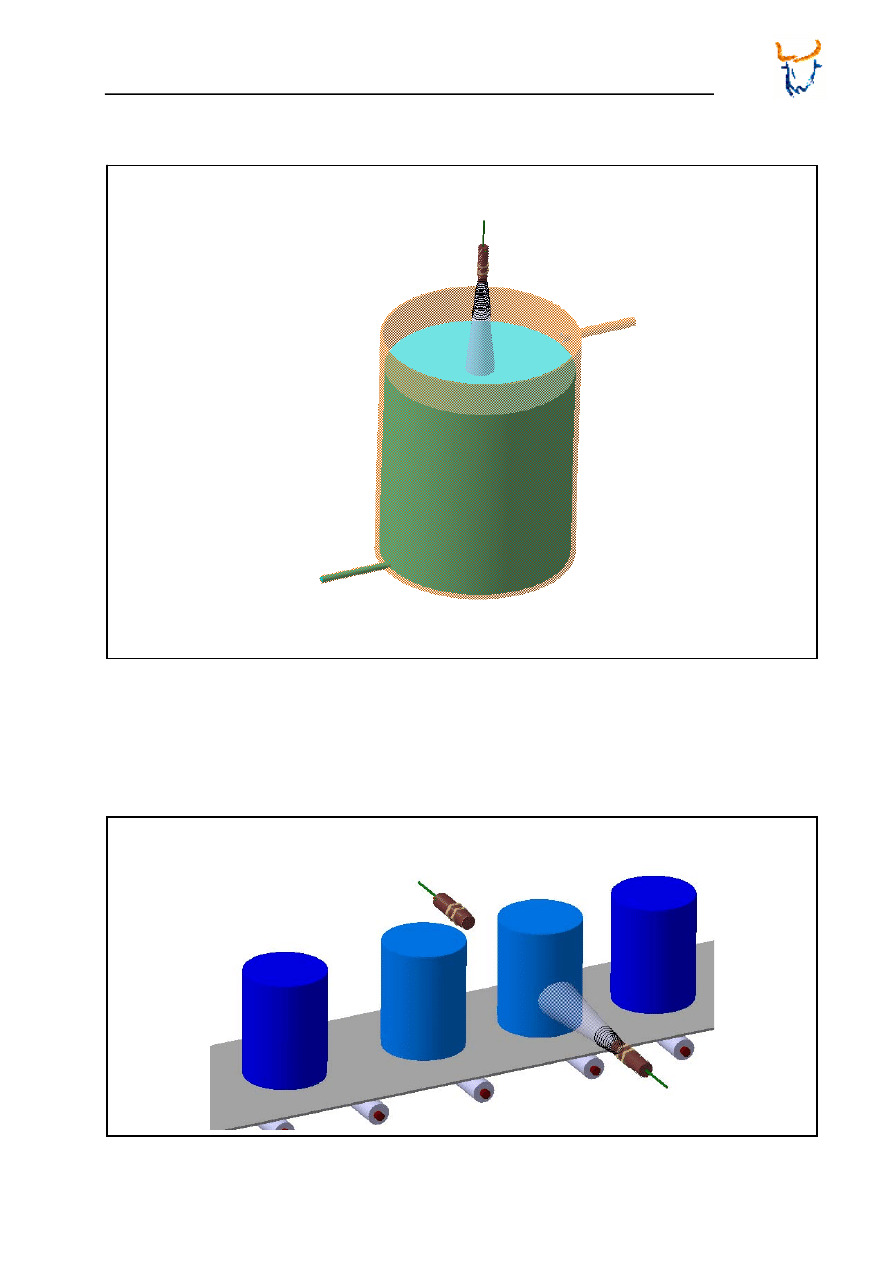
Komponenty mechatroniczne - Podręcznik
Minos
Rys. 3.28:
Czujnik ultradźwiękowy analogowy do pomiaru poziomu cieczy
Rys. 3.29:
Zliczanie elementów na taśmie ultradźwiękowym czujnikiem przelotowym
71
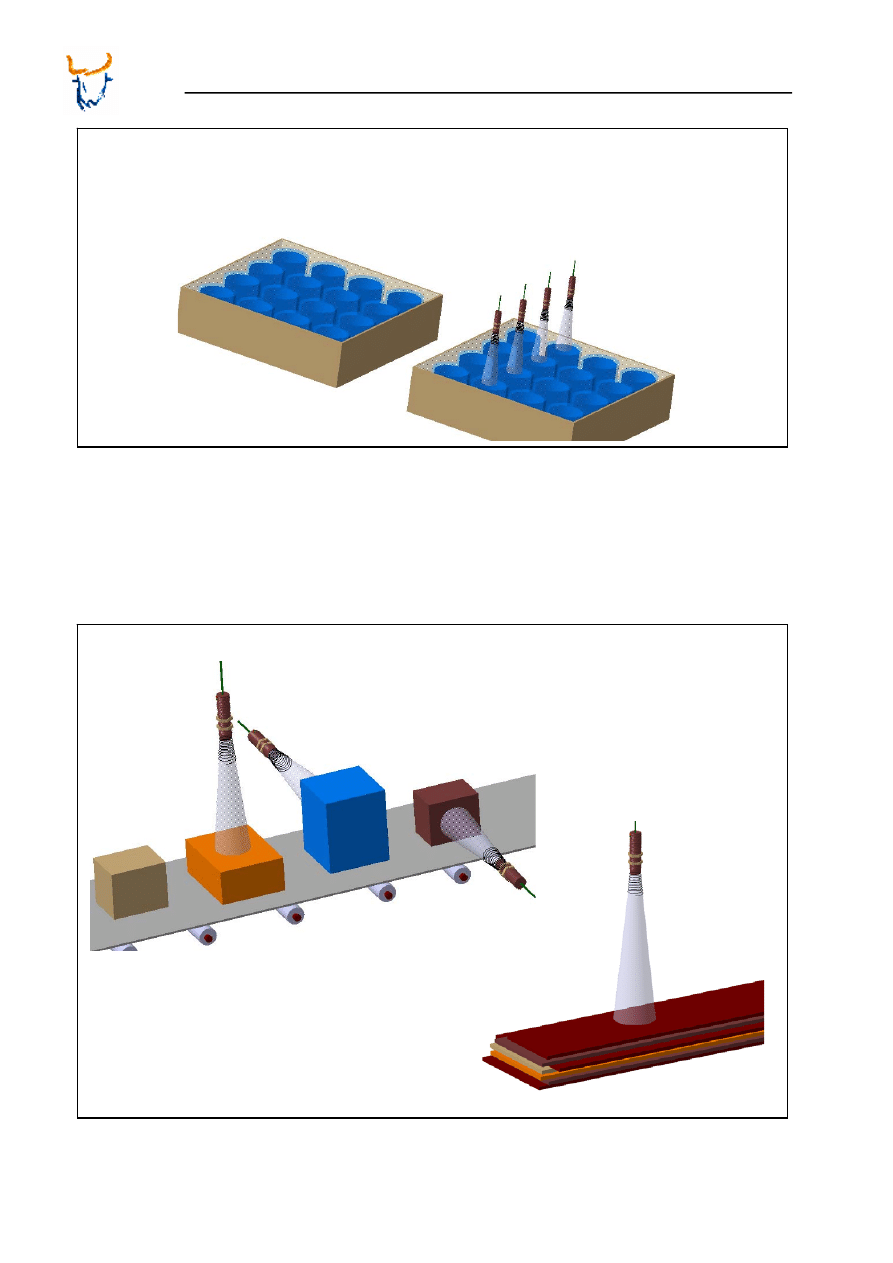
Komponenty mechatroniczne - Podręcznik
Minos
Rys. 3.30:
Ultradźwiękowe czujniki dyfuzyjne do kontroli zapełnienia skrzynek
Rys. 3.31:
Czujniki ultradźwiękowe analogowe do pomiaru wielkości przedmiotów
lub wysokości stosu
72
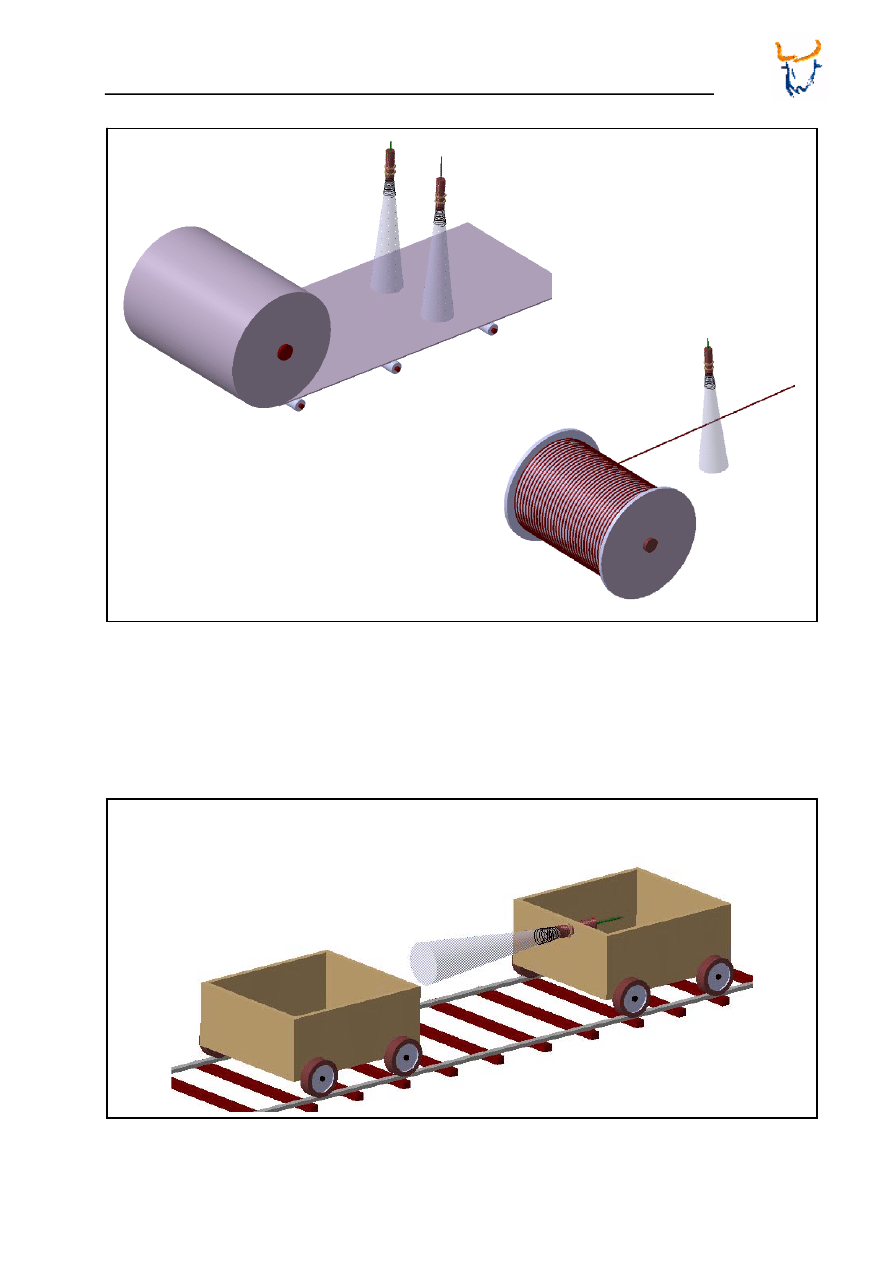
Komponenty mechatroniczne - Podręcznik
Minos
Rys. 3.32:
Czujniki ultradźwiękowe dyfuzyjne wykorzystane do monitorowania uszkodzeń
taśmy lub przewodów
Rys. 3.33:
Czujnik ultradźwiękowy dyfuzyjny do zabezpieczenie przed kolizją poprzez kontro-
lę niebezpiecznej odległości
73

Komponenty mechatroniczne - Podręcznik
Minos
Rys. 3.34:
Czujnik ultradźwiękowy dyfuzyjny wykrywający brak naciągu taśmy
Rys. 3.35:
Czujnik ultradźwiękowy analogowy do pomiaru średnicy bębna z papierem
74
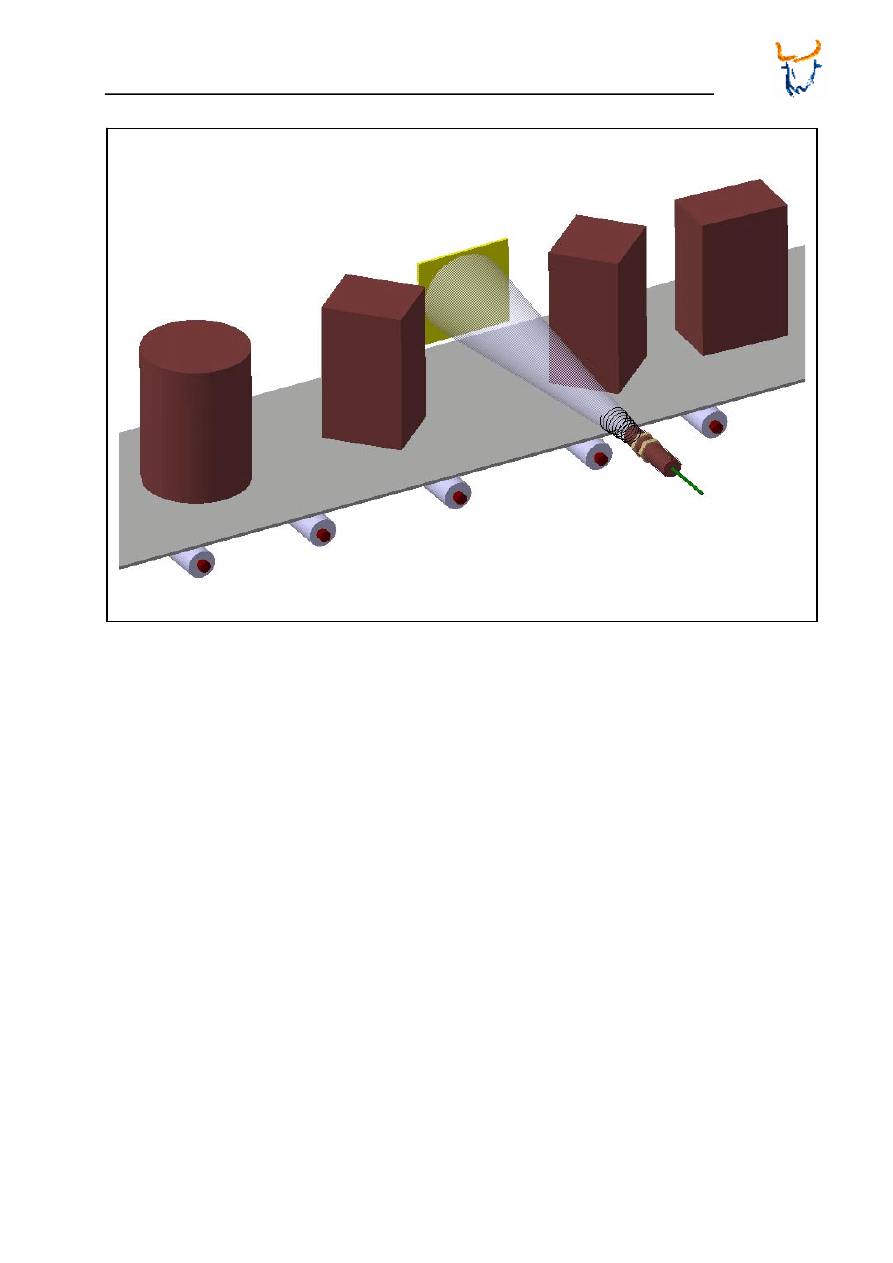
Komponenty mechatroniczne - Podręcznik
Minos
Rys. 3.36:
Zliczanie na taśmie elementów odbijających lub pochłaniających czujnikiem ultra-
dźwiękowym refleksyjnym
75
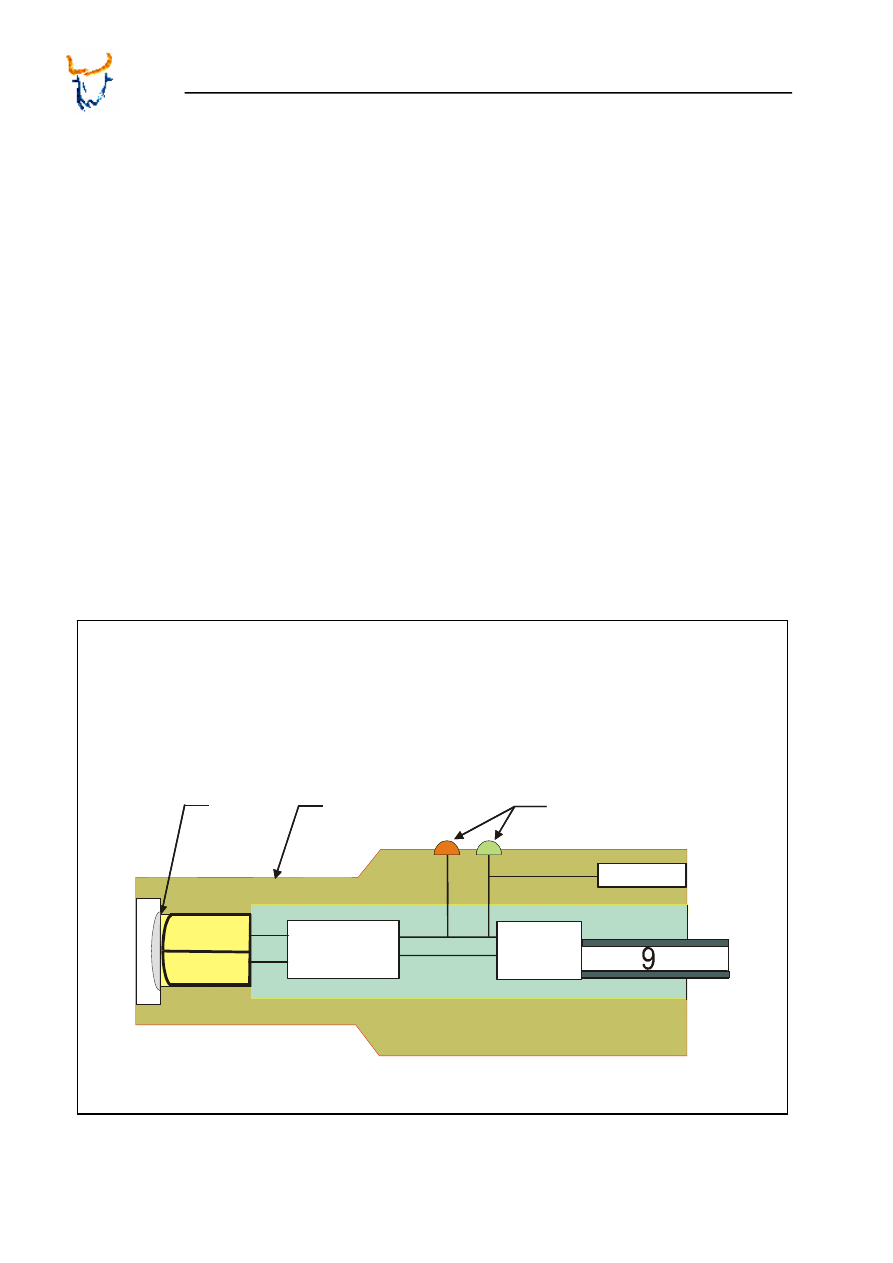
Komponenty mechatroniczne - Podręcznik
Minos
4
Czujniki fotoelektryczne
4.1
Charakterystyka konstrukcji
Czujniki fotoelektryczne są elementami automatyki wykorzystującymi
wiązkę światła do wykrywania obiektów znajdujących się w zasięgu ich
działania. Mogą one wykrywać obiekty wykonane z dowolnego mate-
riału, z odległości od kilku milimetrów do kilkudziesięciu metrów. Re-
agują one wówczas, gdy obiekt spowoduje przerwanie wiązki światła
emitowanej przez czujnik lub, gdy wiązka światła zostanie odbita od
powierzchni przedmiotu. Te zmiany sygnału świetlnego, są zamieniane
w czujniku na sygnał elektryczny i wykorzystane do sterowania stanem
wyjścia czujnika.
Podstawowe elementy czujnika to: źródło światła 1 i odbiornik światła
2, układy elektroniczne 3, układ wyjściowy 4, jedna lub dwie diody lu-
minescencyjne 5, sygnalizujące warunki pracy czujnika, potencjometr
6 do regulacji czułości, obudowa 7 i przezroczysta osłona 8 (rys. 4.1).
2
1
3
4
6
5
8
7
2
1
3
4
6
5
8
7
Rys. 4.1:
Schemat budowy czujnika w obudowie cylindrycznej
76
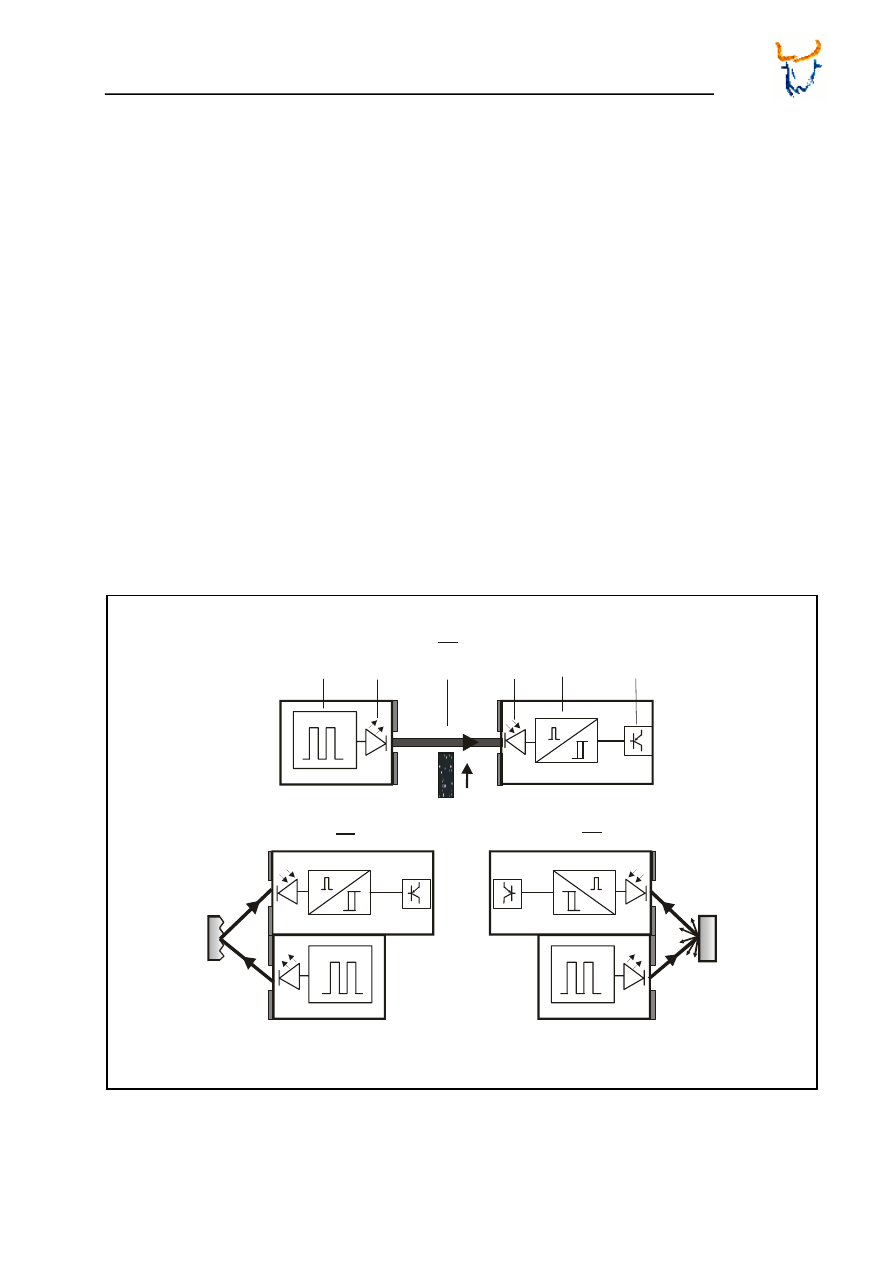
Komponenty mechatroniczne - Podręcznik
Minos
Układy elektroniczne zawierają (rys. 4.2):
-
oscylator 3, pozwalający uzyskać modulowaną intensywność źródła
światła,
- demodulator 4,
dla separacji sygnału użytecznego.
Pozostałe elementy czujnika to emiter światła 1, odbiornik 2 i tranzy-
stor 5, stanowiący człon wyjściowy.
Wymienione elementy czujnika mogą być rozmieszczane w jednej
wspólnej obudowie lub w dwóch obudowach niezależnych, stosownie
do tego czy wykrywany obiekt 6 przerywa wiązkę światła czy ją odbija.
1
3
2
4
5
A
B
C
6
Rys. 4.2:
Podstawowe układy konstrukcyjne czujników fotoelektrycznych: A – Czujnik prze-
lotowy (Through-Beam Sensor), B – Czujnik refleksyjny (Retro-Reflective Sensor),
C – Czujnik dyfuzyjny (Diffuse Sensor)
77
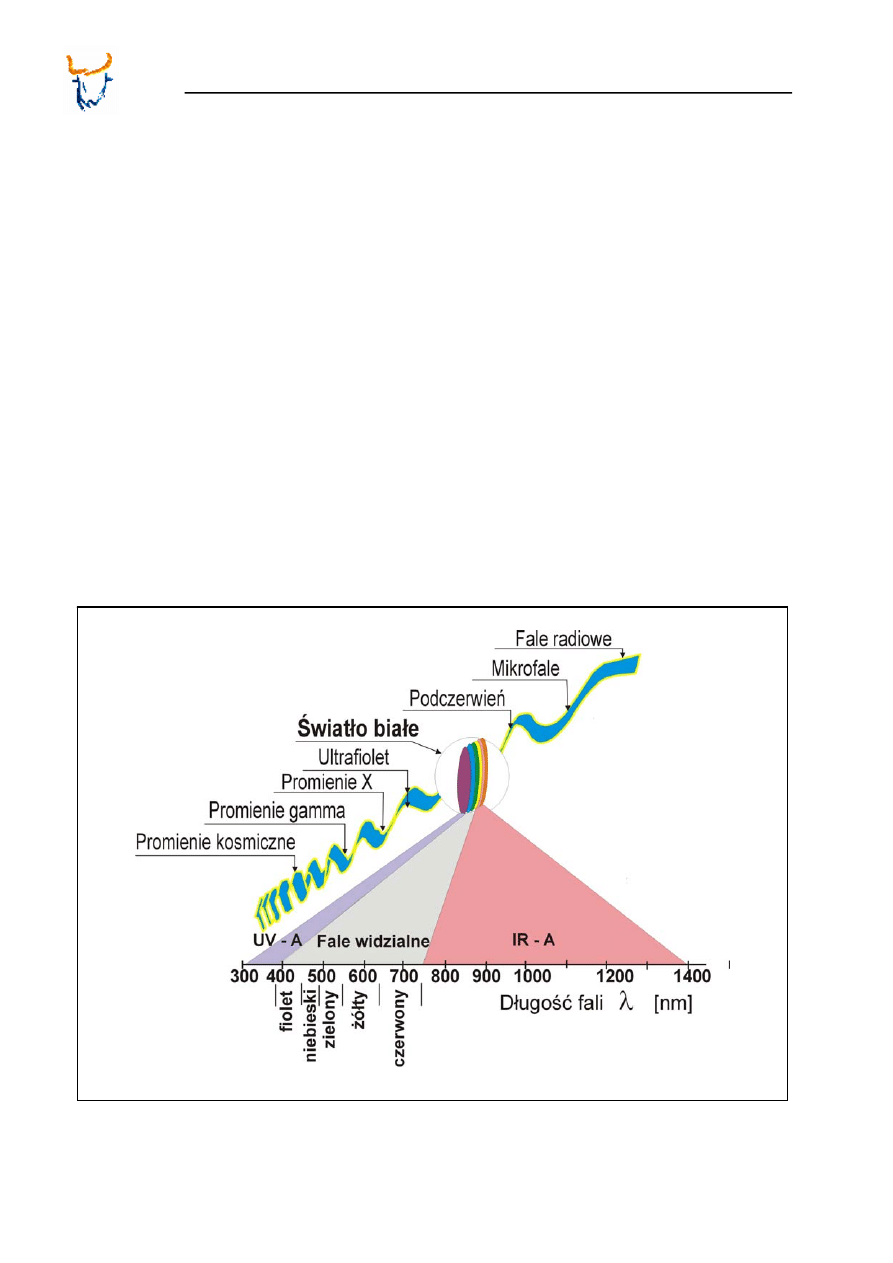
Komponenty mechatroniczne - Podręcznik
Minos
4.2
Elementy fotoelektryczne
4.2.1
Podstawy fizyczne
4.2.1.1 Światło
Światło widzialne wraz z sąsiednimi zakresami, czyli ultrafioletem (o
długościach fal krótszych od światła widzialnego), oraz podczerwienią
(o falach dłuższych) zalicza się z fizycznego punktu widzenia do świa-
tła (rys. 4.3). Światło widzialne to ta część promieniowania elektroma-
gnetycznego, która jest odbierana przez oko ludzkie. Zawiera się ona
w przybliżeniu w zakresie długości fal 380-770 nm.
Rys. 4.3:
Zakresy promieniowania elektromagnetycznego wykorzystywane w sensorach
fotoelektrycznych (UV-A –bliski ultrafiolet, IR-A – bliska podczerwień)
78
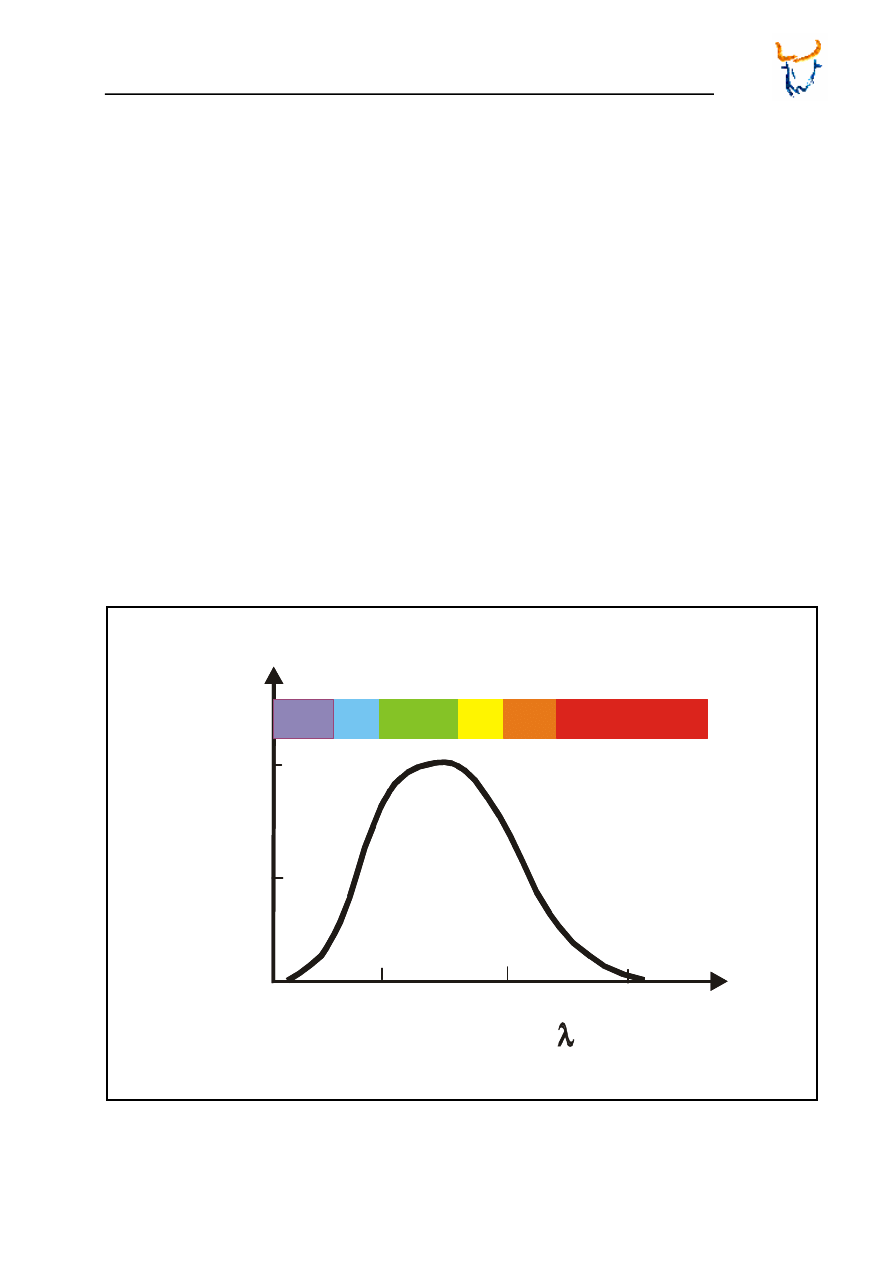
Komponenty mechatroniczne - Podręcznik
Minos
Czułość oka jest różna dla każdej barwy światła widzialnego. Najwięk-
szą wrażliwość wykazuje oko dla barwy bliskiej barwie żółtej, czyli dłu-
gości fali około 550 nm (rys. 4.4). Fale świetlne o długościach fal pod-
czerwonych i ultrafioletowych są dla oka już całkowicie niewidoczne.
W czujnikach fotoelektrycznych najczęściej stosowane jest światło wi-
dzialne czerwone lub też podczerwień. Przy ich wykorzystywaniu wy-
konywane są różne odmiany czujników fotoelektrycznych.
1,0
0,5
0
400
500
600
700 [nm]
1,0
0,5
0
400
500
600
700 [nm]
Cz
uł
ość
wzgl
ędna
Długość fali
Rys. 4.4:
Względna czułość oka ludzkiego na światło widzialne o różnych długościach fali
79
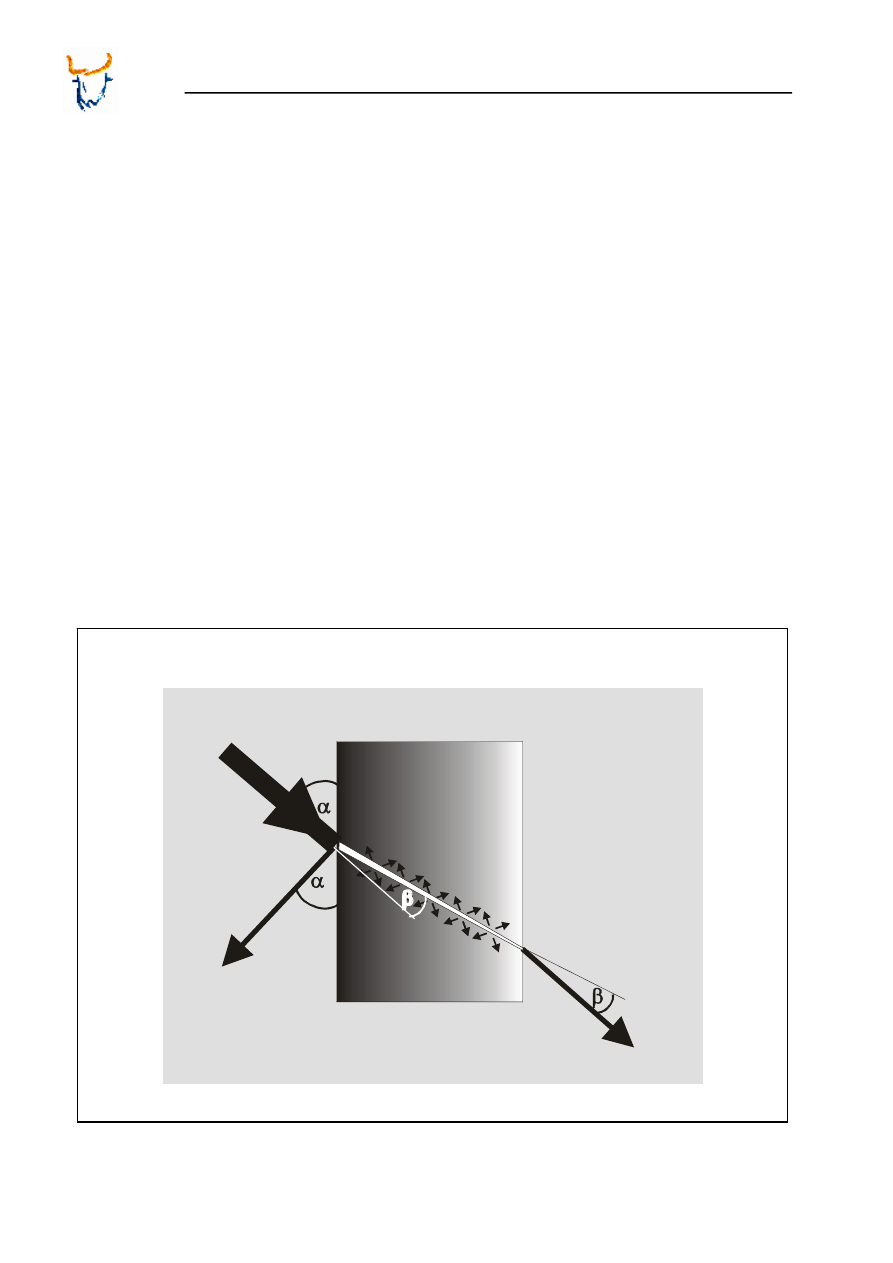
Komponenty mechatroniczne - Podręcznik
Minos
4.2.1.2 Własności światła
Odbicie – światło padając na powierzchnię odbija się od niej. Dzięki
temu możemy widzieć otaczające nas przedmioty (rys. 4.5).
Absorpcja (pochłanianie) – część światła, które pada na powierzchnię
zostaje wchłonięta. Zjawisko to polega na przemianie energii promie-
nistej w inną formę energii np. cieplną.
Transmisja (przepuszczanie) – pozostała część światła, która nie zo-
stanie odbita i pochłonięta, zostaje przez substancję przepuszczona.
W zależności od substancji, światło może zostać w niej dodatkowo
rozproszone.
Refrakcja – załamanie światła przy jego przejściu pomiędzy ośrodka-
mi o różnej gęstości. W szczególnych przypadkach, zamiast załamania
może nastąpić całkowite wewnętrzne odbicie światła od powierzchni
oddzielającej oba ośrodki. Zjawisko to jest wykorzystywane w światło-
wodach. Różne długości fali świetlnej wykazują różną zdolność do re-
frakcji. Dzięki temu światło białe przepuszczone przez pryzmat rozsz-
czepia się na kolory tęczy.
Tra
ns
m
isja
O
db
ic
ie
Abso
rpcja
Refrakcja
Refrakcja
Strumień
światła
Rys. 4.5:
Własności światła
80
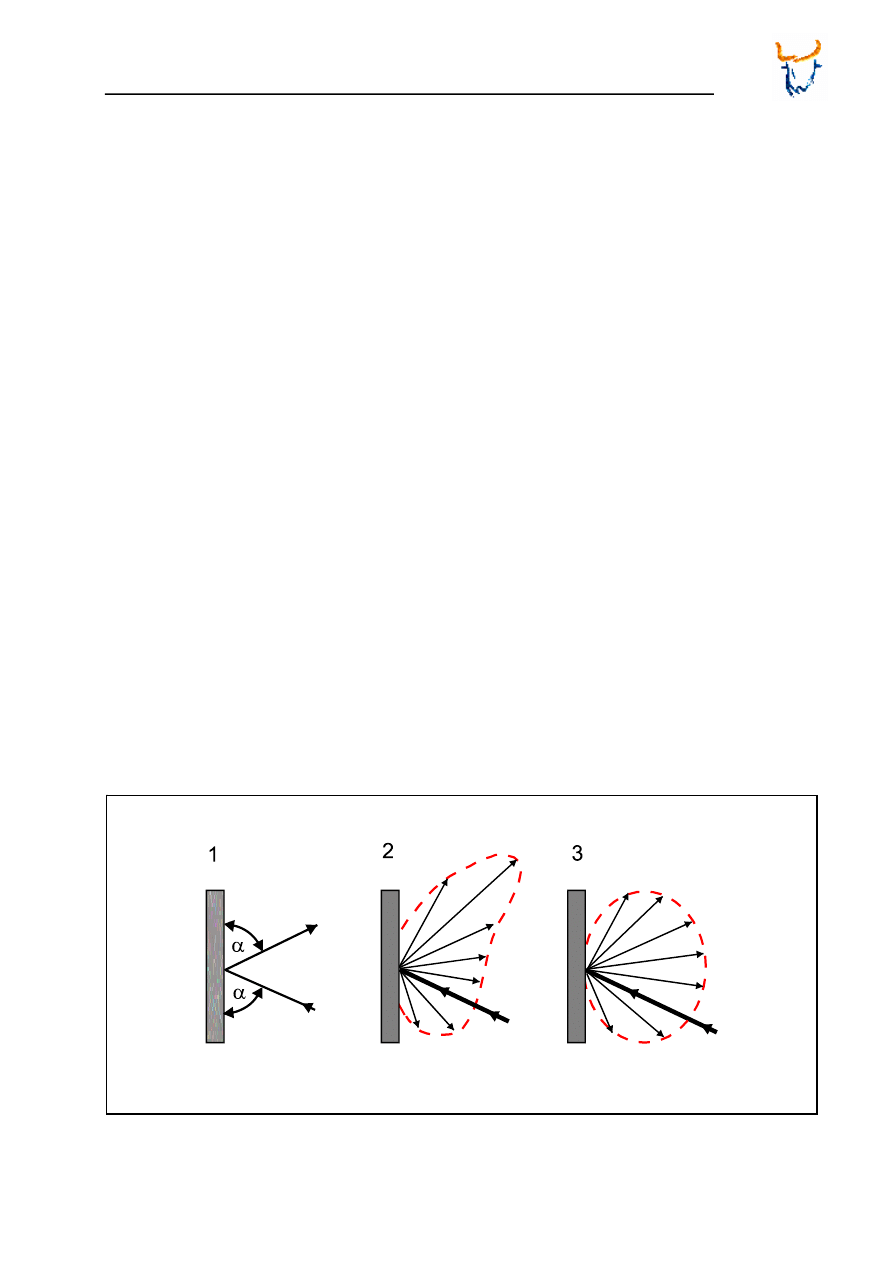
Komponenty mechatroniczne - Podręcznik
Minos
Sposób odbijania się światła od różnych powierzchni zależy w dużym
stopniu od ich własności refleksyjnych jak: chropowatości, struktury,
koloru, połysku. Może to być (rys. 4.6):
1. odbicie kierunkowe, przy którym kąt odbicia jest równy kątowi pa-
dania światła, np. od powierzchni metalu o połysku lustrzanym lub od
lustra,
2. odbicie kierunkowo-rozproszone, gdy światło odbija się częściowo
w sposób kierunkowy, a częściowo w sposób rozproszony, np. przy
pewnych kątach światło odbite od pomalowanej powierzchni może
mieć takie właśnie odbicie,
3. odbicie rozproszone, występujące, gdy światło pada na powierzch-
nię odbijającą i odbija się od niej we wszystkich kierunkach, np. od
powierzchni chropowatej.
Rys. 4.6:
Sposób odbijania się światła od różnych powierzchni
81

Komponenty mechatroniczne - Podręcznik
Minos
82
4.2.2
Fotoemitery
Na rodzinę elementów fotoelektronicznych składają się dwie podsta-
wowe grupy elementów półprzewodnikowych. Są to półprzewodnikowe
źródła światła (zwane często emiterami) oraz fotodetektory. U podstaw
ich działania leży wykorzystanie dwóch fundamentalnych procesów
optycznych: emisji fotonów w emiterach oraz absorpcji fotonów w
oświetlonych fotodetektorach.
Fotoemitery dzielą się na:
- diody elektroluminescencyjne LED – (Light Emitting Diode), emitują-
ce promieniowanie widzialne przy długości fali promieniowania mniej-
szej od 780 nm,
- diody elektroluminescencyjne emitujące promieniowanie podczerwo-
ne IR o długości fali powyżej 780 nm,
- lasery półprzewodnikowe LD, stanowiące rozwinięcie konstrukcji dio-
dy LED, pracujące w zakresie światła widzialnego lub podczerwieni.
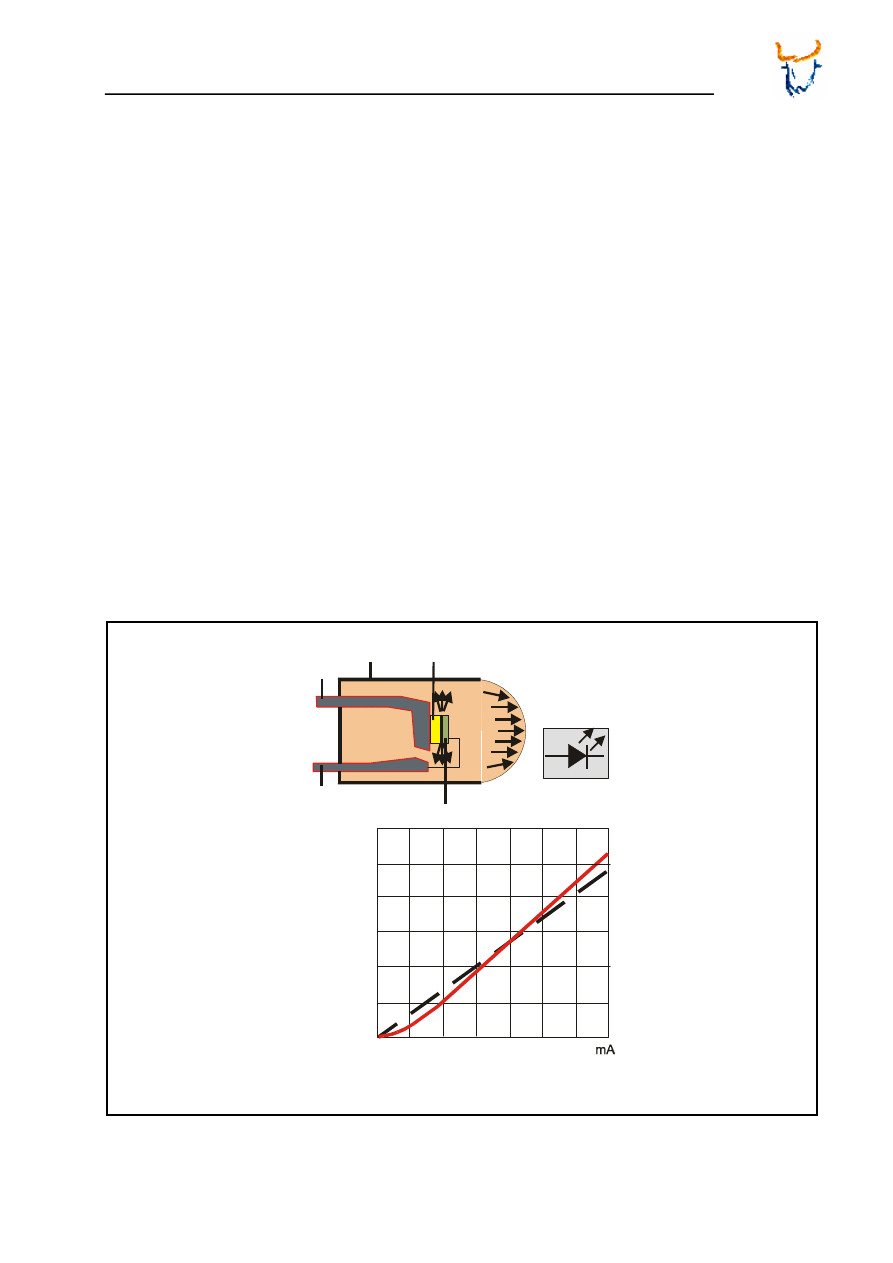
Komponenty mechatroniczne - Podręcznik
Minos
4.2.2.1 Diody elektroluminescencyjne (LED)
Zasada działania diody LED oparta jest na zjawisku elektrolumine-
scencji tj. emitowaniu przez materię promieniowania elektromagne-
tycznego pod wpływem czynnika pobudzającego, którym jest prąd
elektryczny dostarczony z zewnątrz. Składa się ona z warstwy pół-
przewodnika typu n, warstwy półprzewodnika typu p, obszaru aktyw-
nego (złącza p-n), oraz z pary metalowych kontaktów – anody i katody
(rys. 4.7).
Dioda LED pracuje prawidłowo przy polaryzacji złącza w kierunku
przewodzenia, czyli po przyłożeniu do niej napięcia >0. Intensywność
świecenia zależy od wartości doprowadzonego prądu, przy czym za-
leżność ta jest liniowa w dużym zakresie zmian prądu przewodzenia.
1,5
1,0
0,5
0 10 20 30 40 50 60
Wz
gl
ę
dna
in
ten
syw
n
ość
świ
a
tła
Prąd przewodzenia
katoda
anoda
obudowa
n
p
Rys. 4.7:
Model fotoemitera, jego symbol na schematach elektrycznych i charakterystyka
prądowa
83
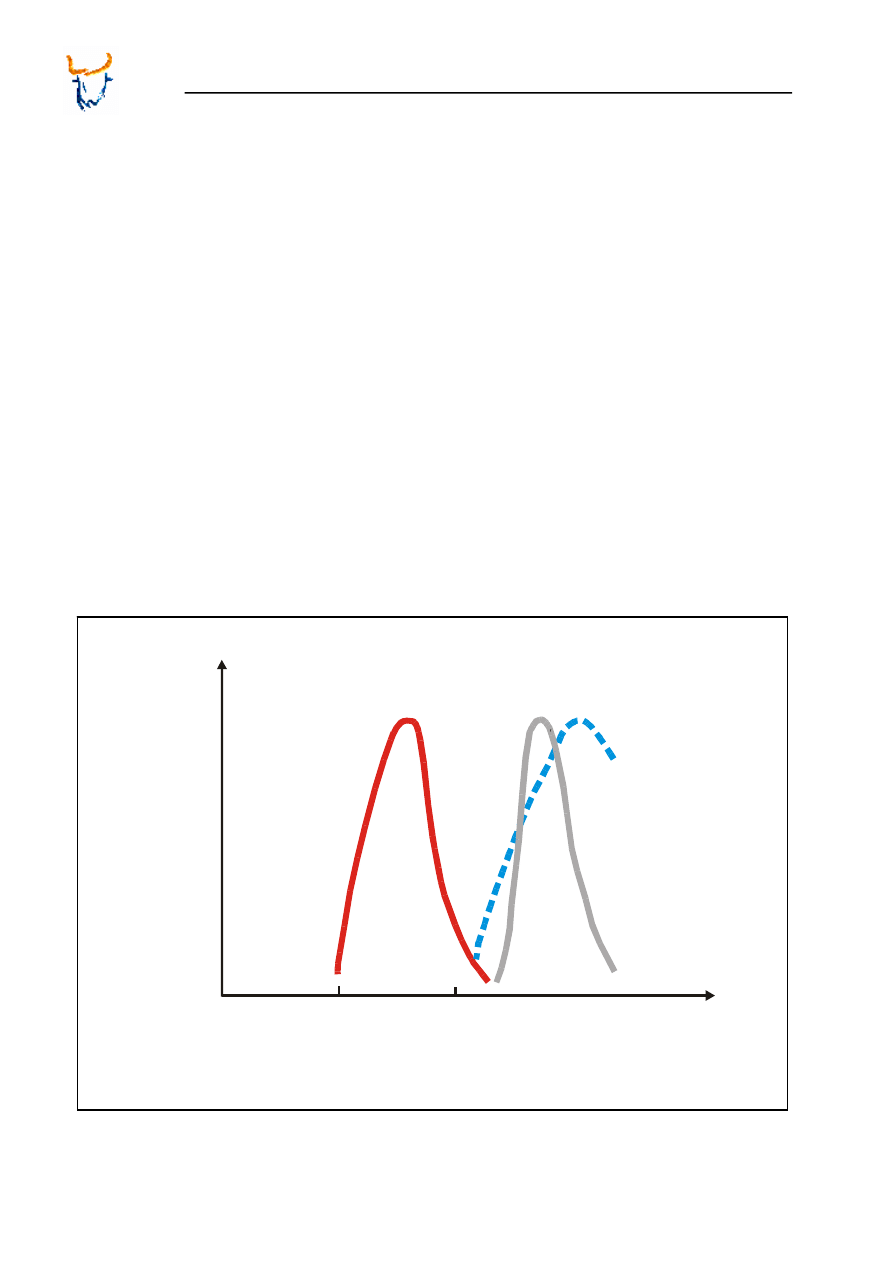
Komponenty mechatroniczne - Podręcznik
Minos
Emisja promieniowania diody LED zachodzi w dość wąskim przedziale
długości fal. Wartość dominującej długości fali określa barwę świece-
nia diody LED i zależy od rodzaju materiału półprzewodnikowego
(rys. 4.8). Materiał półprzewodnikowy może mieć różny skład i do-
mieszki, powodujące różne kolory emitowanego światła. Diody elektro-
luminescencyjne są wytwarzane z materiałów półprzewodnikowych
(pierwiastki z III i V grupy układu okresowego, takich jak:
•
arsenek galu GaAs – emituje w paśmie podczerwieni A do światła
czerwonego (950 – 650 nm),
•
arsenofosforek galu GaAsP – daje światło od czerwonego do żółte-
go (630 – 590 nm),
•
azotek galu GaP – świeci niebiesko (430 nm).
Emitowana wiązka światła ma sporą rozbieżność i wymaga skupienia.
Dlatego obudowy diod LED zawierają dodatkowo soczewki formujące
(skupiające) strumień świetlny.
1,0
0,5
0
400 500 600 700 800
GaP
GaAs
GaAsP
nm
Długość fali
λ
W
zg
lę
dny
pr
ą
d pr
zewodzen
ia
Rys. 4.8:
Charakterystyki widmowe diod LED
84
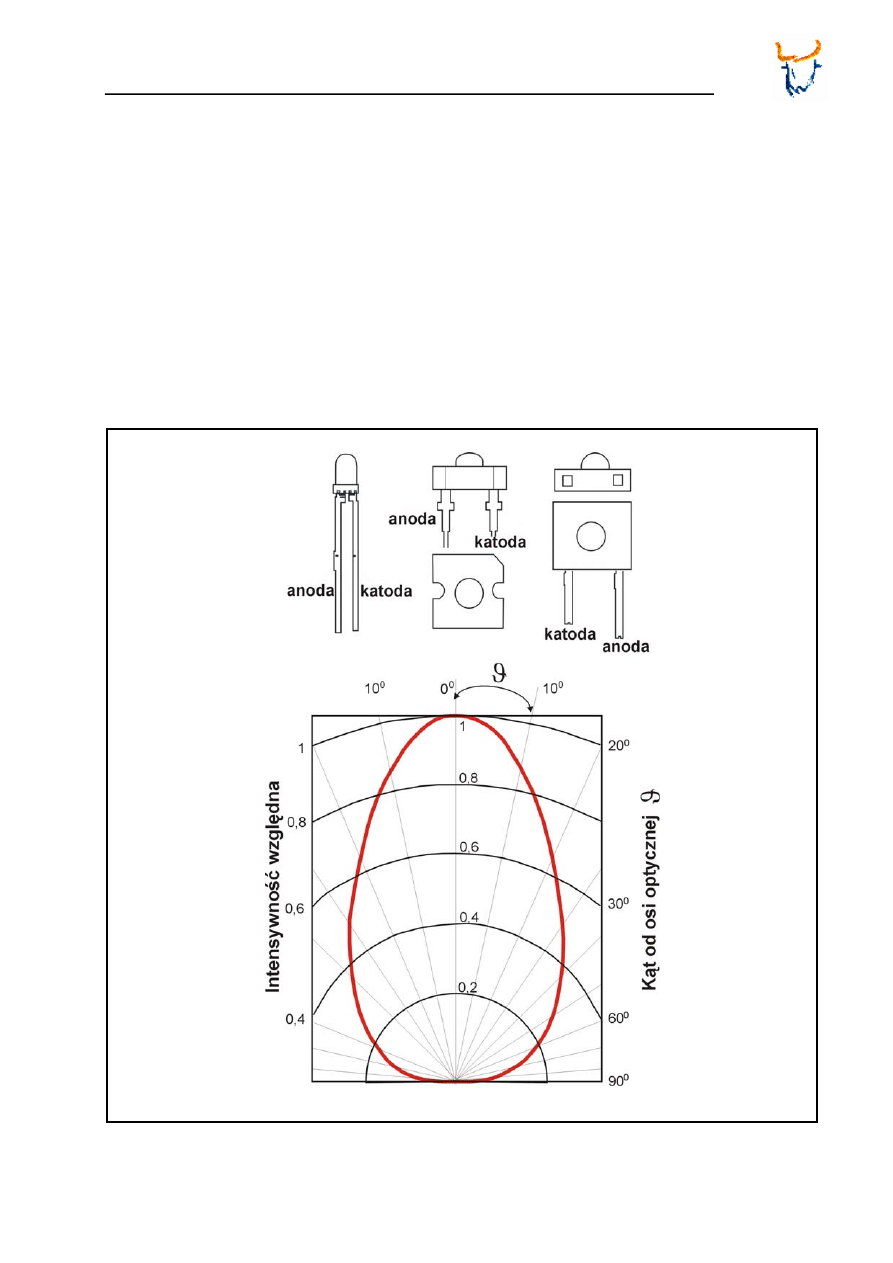
Komponenty mechatroniczne - Podręcznik
Minos
Jako emitery w czujnikach fotoelektrycznych stosowane są diody LED
emitujące światło z zakresu widzialnego jak i diody pracujące w zakre-
sie bliskiej podczerwieni (podczerwień A). Światło widzialne ułatwia
odpowiednie ustawienie czujnika, natomiast impulsy podczerwieni, są
preferowane ze względu na mały pobór mocy, dokładność i możliwość
detekcji przy większych odległościach. Diody LED są umieszczane
zwykle w obudowach: z tworzyw sztucznych, przeźroczystych, mato-
wych, bezbarwnych lub są barwione na taki kolor jakim świeci dioda.
Obudowy są zamknięte soczewkami z tworzyw sztucznych, formują-
cymi wiązkę promieniowania. Pozwalają one uzyskać optymalny
kształt charakterystyki kątowej promieniowania (rys. 4.9).
Rys. 4.9:
Przykład kształtów LED i charakterystyki kątowej promieniowania diody
85
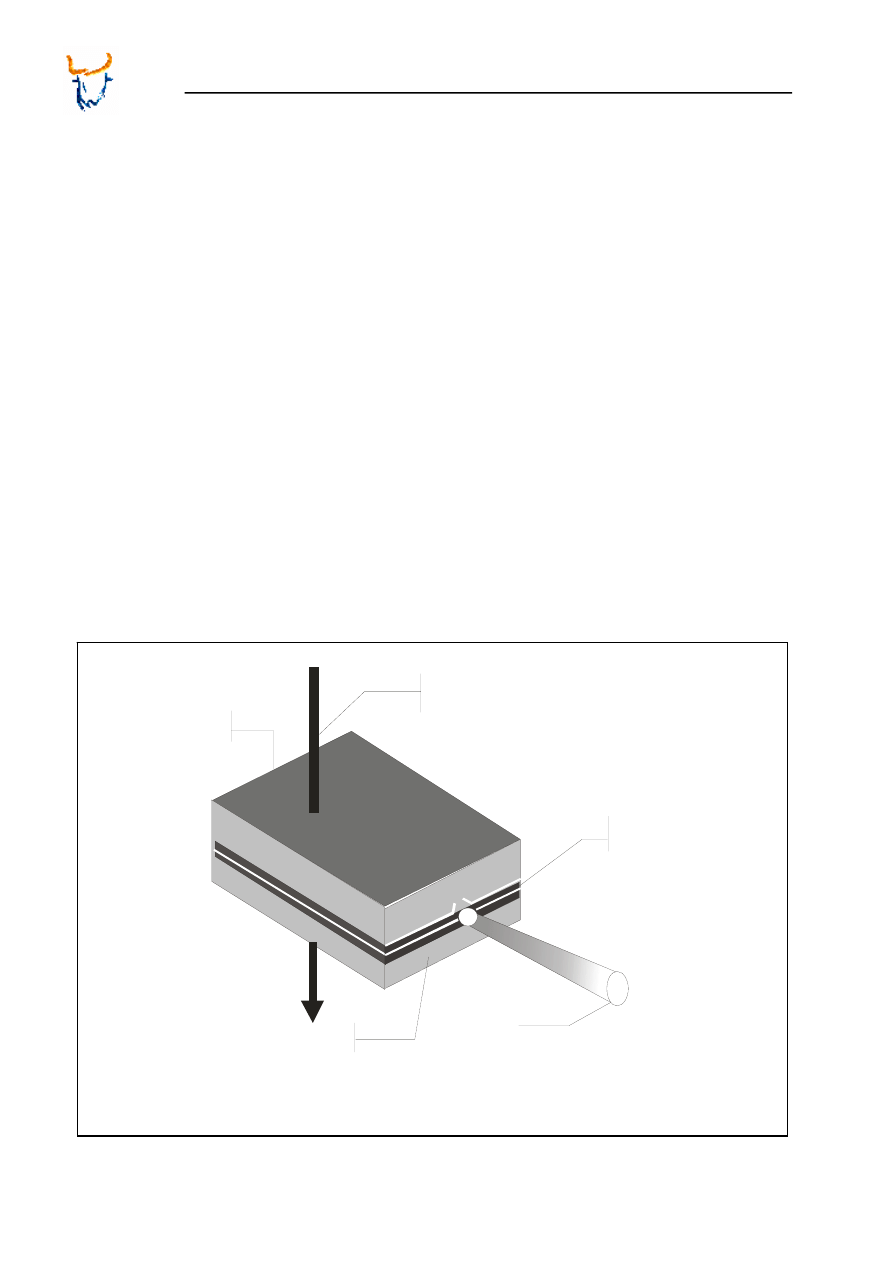
Komponenty mechatroniczne - Podręcznik
Minos
4.2.2.2
Diody laserowe (LD)
Podstawową różnicą pomiędzy diodami LED i diodami laserowymi jest
to, że diody laserowe posiadają rezonator optyczny. Rezonator taki
tworzą krawędzie diody laserowej (rys. 4.10). Do pewnej wartości na-
tężenia prądu płynącego przez złącze półprzewodnikowe dioda lase-
rowa działa jak typowa dioda LED. Jednak po przekroczeniu progowej
wartości prądu w diodzie dochodzi do wymuszonej emisji fotonów. To
właśnie emisja wymuszona zapewnia wyjątkowe własności świata emi-
towanego przez lasery tj.: dużą gęstość mocy, spójność oraz wąski
zakres spektralny.
REZ
ON
ATO
R O
PTY
CZN
Y
Złącze p-n
Światło
Prąd
Krawędź
diody
Krawędź
diody
Rys. 4.10:
Budowa warstwowa diody laserowej
86
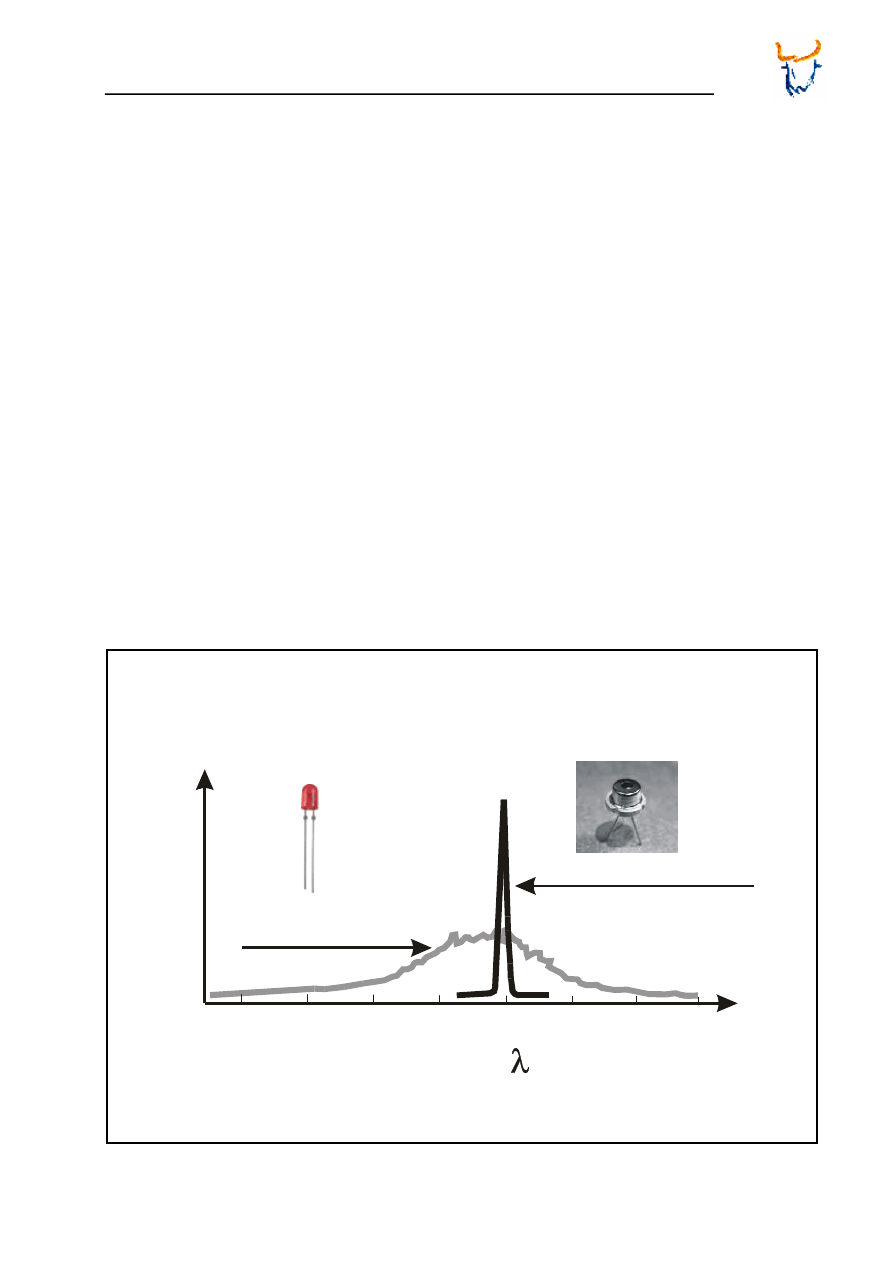
Komponenty mechatroniczne - Podręcznik
Minos
W laserze półprzewodnikowym LD substancją czynną jest złącze p-n
diody półprzewodnikowej. Emituje ono silne oraz spójne promieniowa-
nie o dużym natężeniu, dzięki czemu możliwe są większe zakresy po-
miarowe niż w czujnikach z diodami LED (rys. 4.11).
W czujnikach fotoelektrycznych stosowane są diody laserowe głównie
z zakresu światła widzialnego (635 – 690 nm).
Czujniki z laserowymi emiterami są szczególnie przydatne do detekcji
(wykrywania) małych przedmiotów lub do dokładnego ich pozycjono-
wania. Światło lasera jest prawie równoległą wiązka światła, co przy
dużych zakresach pomiarowych bardzo ułatwia poprawne ustawienie
emitera względem celu.
długość fali [nm]
642
644
646
648
650
652
654
656
in
tensyw
no
ść
Światło laserowe
(czerwone)
LED
(światło czerwone)
Rys. 4.11:
Charakterystyka widmowa diody laserowej na tle charakterystyki diody LED
87
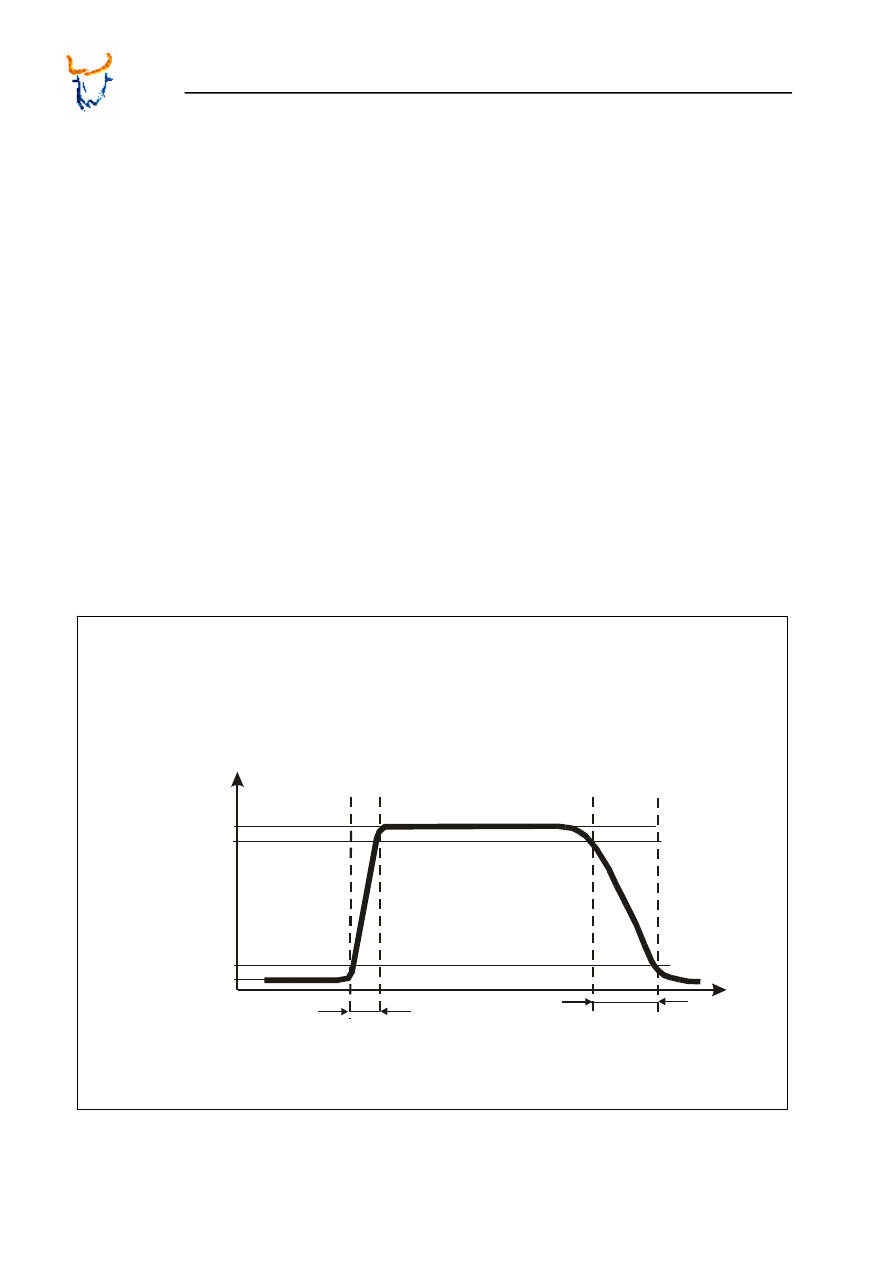
Komponenty mechatroniczne - Podręcznik
Minos
4.2.3
Fotodetektory
4.2.3.1 Fotodiody
Półprzewodnikowe fotodetektory przetwarzają energię świetlną pro-
mieniowaną przez emiter na energię elektryczną. Są to najczęściej
półprzewodnikowe fotodiody lub fototranzystory.
Pod wpływem absorpcji promieniowania optycznego może zachodzić
w fotodetektorze wewnętrzne zjawisko fotoelektryczne, prowadzące do
powstania w nim fotoprądu. W nieoświetlonym fotodetektorze ze złą-
czem p-n płynie tylko niewielki prąd ciemny (dark). Ważną cechą foto-
detektorów jest szybkość odpowiedzi na impuls światła. Czas narasta-
nia określa się jako czas przyrostu fotoprądu od 0,1 do 0,9 wartości
maksymalnej. Podobnie czas opadania jest czasem zmiany z 0,9 do
0,1 maksymalnej wartości fotoprądu (rys. 4.12).
0.9
0.1
t
r
t
f
I
darc
I
Φ
I
Φ
I
Φ
time
P
rą
d
w
yj
ś
ci
o
w
y
Rys. 4.12
Sposób wyznaczania czasu narastania t
r
i opadania impulsu prądu t
f
w fotodetek-
torze
88
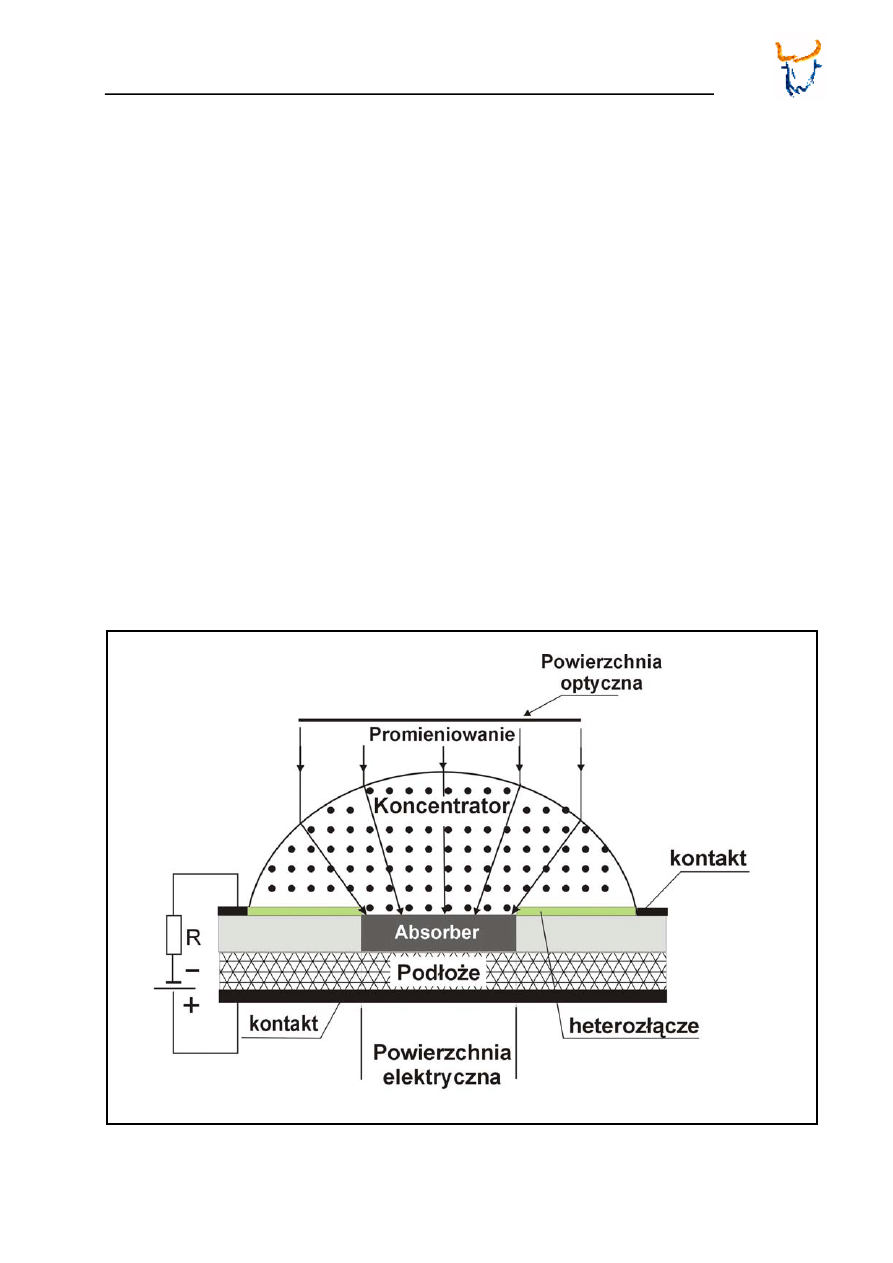
Komponenty mechatroniczne - Podręcznik
Minos
Fotodiody wykonuje się z krzemu lub arsenku galu. Pracują one z ze-
wnętrznym źródłem napięcia (źródłem ujemnej polaryzacji), a oświe-
tlenie złącza p-n powoduje wzrost prądu wstecznego fotodiody. War-
tość tego prądu zależy głównie od gęstości strumienia światła padają-
cego na absorber, którego zwiększeniu służy koncentrator (rys. 4.13).
Istotną zaletą fotodiody jest duża częstotliwość pracy. Mogą one prze-
twarzać sygnały świetlne o częstotliwości do kilkudziesięciu MHz, na-
tomiast wadą jest dość silna zależność prądu fotodiody od temperatu-
ry.
Rys. 4.13:
Model fotodiody
89
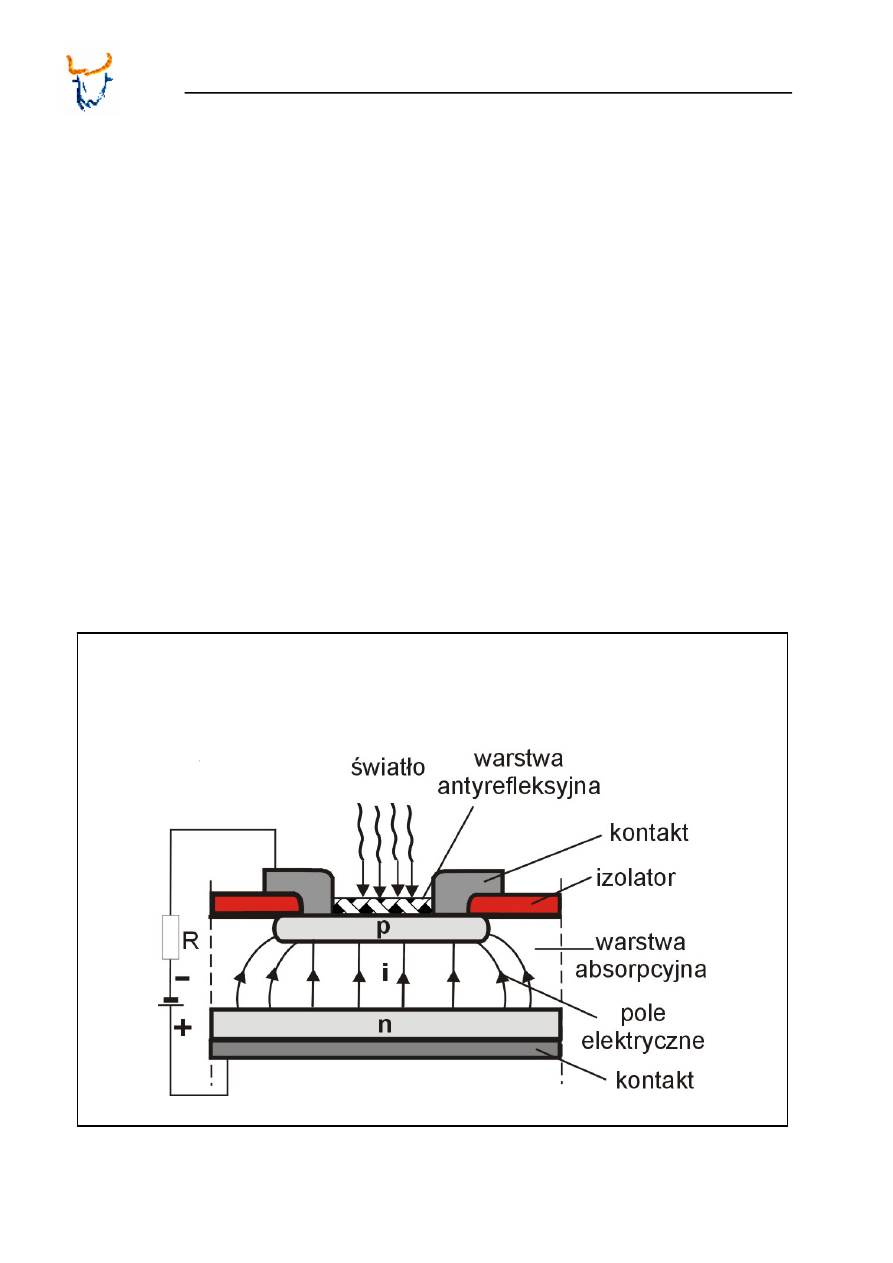
Komponenty mechatroniczne - Podręcznik
Minos
Jeśli miedzy półprzewodniki n oraz p wstawi się warstwę półprzewod-
nika samoistnego „i” to otrzymamy diodę PIN. (rys. 4.14). Prowadzi to
do zmiany struktury energetycznej półprzewodnika. Dla typowej foto-
diody grubość absorbera (warstwy zaporowej) jest znacznie mniejsza
od głębokości wnikania fotonów w półprzewodnik. Powoduje to, że
sprawność fotodiody nie jest duża, co ogranicza wartość generowane-
go fotoprądu. Prąd ten można zwiększyć przez wbudowanie pomiędzy
warstwę typu –p a warstwę typu -n warstwy półizolacyjnej typu –i (fo-
todioda PIN), zwiększając tym samym grubość obszaru, w którym ist-
nieje pole elektryczne. Typowy czas narastania impulsu, stanowiącego
odpowiedź prądową na krótki impuls światła, jest dla takiej diody krót-
szy niż dla zwykłych fotodiod oraz jej sprawność jest większa.
Rys. 4.14:
Struktura fotodiody PIN
90
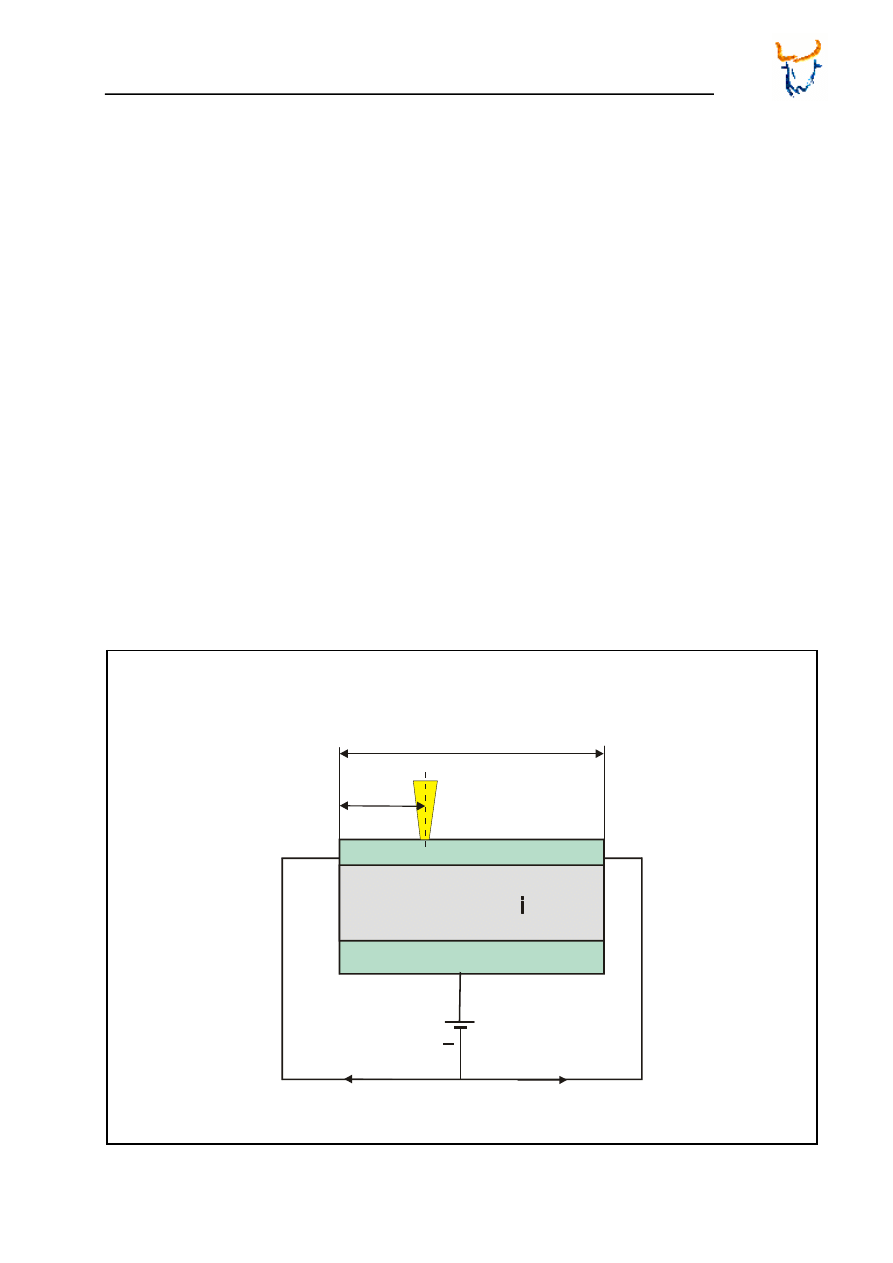
Komponenty mechatroniczne - Podręcznik
Minos
4.2.3.2 Fotodetektory liniowe PSD
Fotodetektor liniowy (Position Sensitive Detector - PSD) jest w istocie
fotodiodą PIN o dużej powierzchni czułej na światło. Warstwa p pół-
przewodnika w kształcie podłużnej linijki wystawiona jest na działanie
światła (rys. 4.15). Wskutek wewnętrznego zjawiska fotoelektrycznego
na zaciskach elementu pojawiają się ładunki elektryczne, które powo-
dują przepływ prądów I
A
oraz I
B
. W przypadku, gdy półprzewodnik p
wystawiony na działanie światła jest równomiernie oświetlony (tj. na
lewą połowę linijki pada podobna liczba fotonów jak na prawą) prądy I
A
≈ I
B
. Odpowiada to sytuacji, w której promień świetlny pada dokładnie
na środek linijki światłoczułej, przy równomiernym natężeniu oświetle-
nia tła. Jeżeli światło pada niesymetrycznie względem środka linijki,
wówczas prądy te będą różne. Mierząc zatem stosunek prądów płyną-
cych przez PSD określa się liniowe położenie maksimum natężenia
światła, a więc przemieszczenie x. Układ elektroniczny zawarty w
czujniku przekształca go następnie na napięcie, które jest analogowym
sygnałem wyjściowym.
A
B
M
+
I
I
A
B
p
n
L
światło
x
Rys. 4.15:
Zasada działania detektora liniowego wykrywającego położenie plamki świetlnej
91
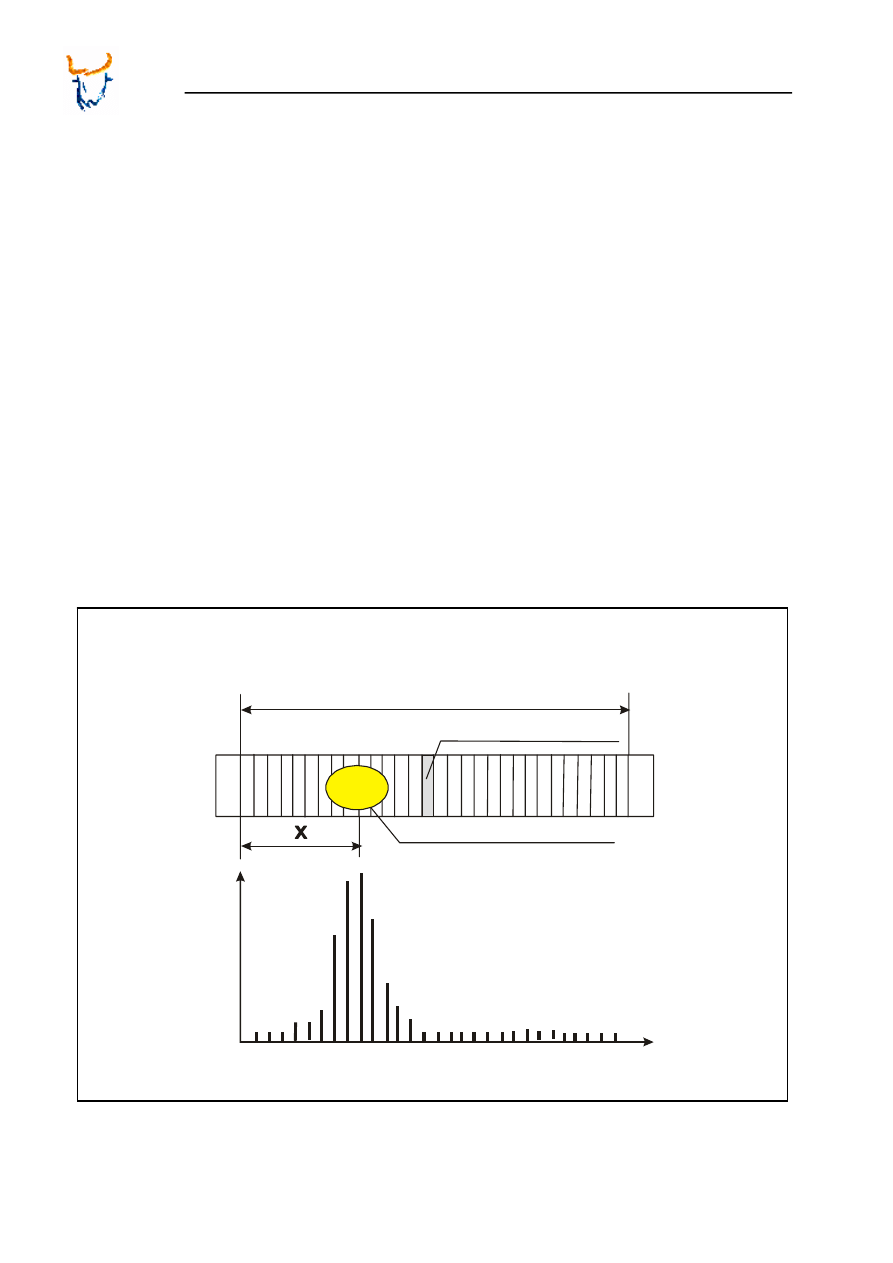
Komponenty mechatroniczne - Podręcznik
Minos
4.2.3.3 Fotodetektory liniowe CCD
W fotoelektrycznych czujnikach detekcyjnych oraz zbliżeniowych
(proximity sensors) detektory światła PSD są często zastępowane li-
niowymi elementami CCD (ang. Charge Coupled Device). Są one bo-
wiem bardziej odporne na zakłócenia spowodowane przypadkowymi
lub wtórnymi odbiciami światła docierającymi do odbiornika. Spowo-
dowane jest to tym, że
element CCD reaguje tylko na intensywność
światła a nie na ilość światła, jak ma to miejsce w PSD. Typowa cyfro-
wa matryca CCD stanowi regularną strukturę liniową złożoną ze świa-
tłoczułych komórek (pikseli) o wyjściu składającym się z dyskretnych
napięć, reprezentujących intensywność światła padającego na każdy
piksel detektora (rys. 4.16).
Pozycja plamki świetlnej „x” odpowiada położeniu środka ciężkości
rozkładu intensywności światła padającego na powierzchnię CCD. Ma-
tryce CCD wykazują największą efektywność w zakresie długości fal
świetlnych od 500 do 900 nm.
Elementarny PIKSEL
Długość
IN
T
E
N
S
Y
W
N
O
ŚĆ
Numer kolejny PIKSELA
OBRAZ plamki światła
Rys. 4.16:
Liniowy fotodetektor CCD do wykrywania pozycji plamki na podstawie oceny roz-
kładu intensywności światła
92
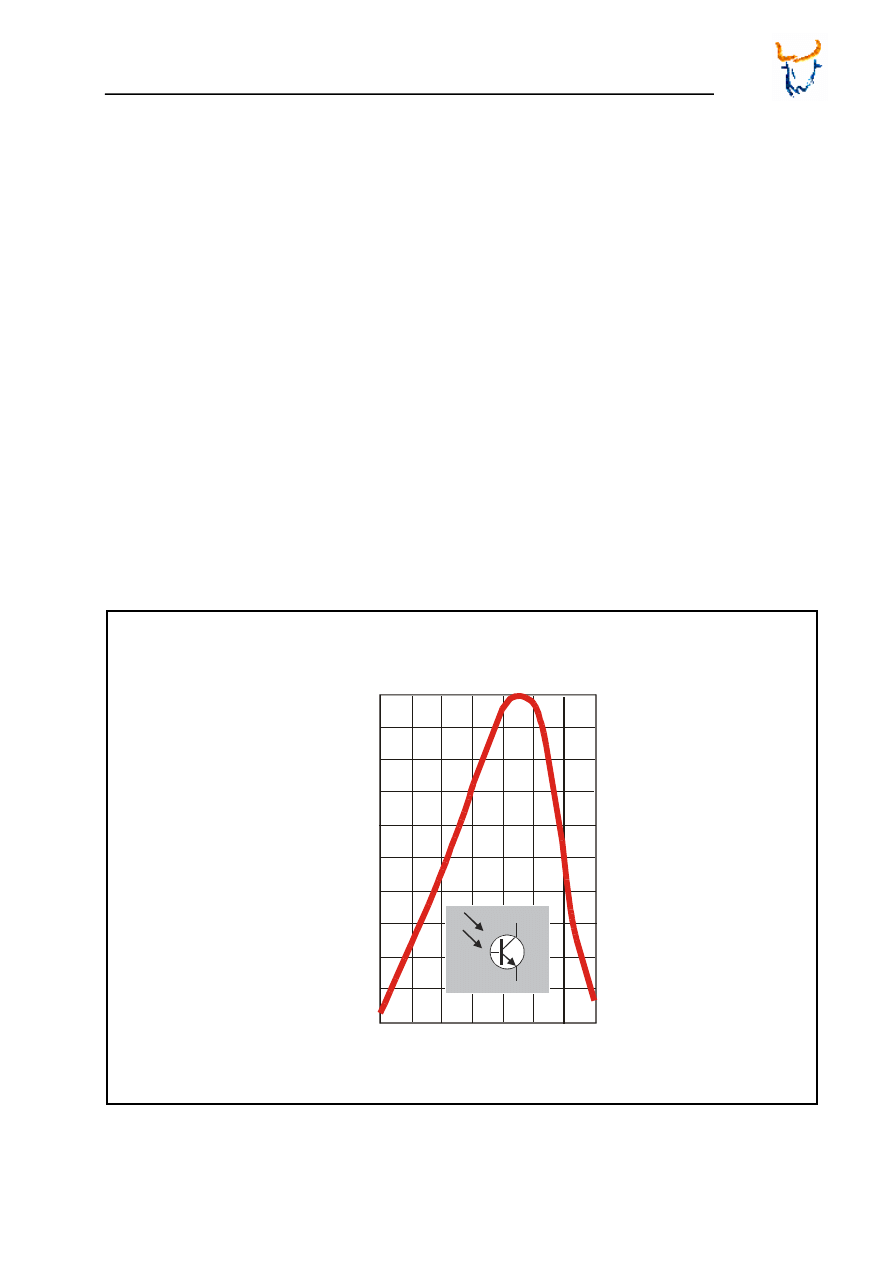
Komponenty mechatroniczne - Podręcznik
Minos
4.2.3.4 Fototranzystory
Fototranzystor jest elementem półprzewodnikowym o dwóch złączach
p-n, umożliwiającym jednoczesną modulację prądu wyjściowego za
pomocą promieniowania jak i sygnałów elektrycznych. Jego konstruk-
cja jest podobna do zwykłego tranzystora wzmacniającego z tym, że
obudowa umożliwia dodatkowo oświetlenie odpowiedniego obszaru
półprzewodnika (obszaru jego bazy). Fototranzystor jest detektorem o
czułości wielokrotnie większej niż czułość fotodiody, ponieważ prąd
wytworzony pod wpływem promieniowania świetlnego jest w fototran-
zystorze dodatkowo wzmacniany. Dzięki tej zalecie są one często sto-
sowane jako fotodetektory, chociaż maja znacznie mniejszą częstotli-
wość graniczną niż fotodiody.
Wyjściowe charakterystyki prądowo - napięciowe fototranzystorów są
analogiczne jak dla normalnych tranzystorów bipolarnych. Parametrem
zmiennym jednak nie jest prąd bazy, ale natężenie oświetlenia obsza-
ru bazy (rys. 4. 17). W czujnikach stosowane są zarówno fototranzy-
story typu „npn” jak i typu „pnp”.
80
60
20
0
400
600
800
1000
nm
In
te
ns
yw
n
ość
ś
wiat
ła
Długośc fali
λ
%
40
100
Rys. 4.17
Charakterystyka czułości widmowej fototranzystora i jego symbol na schematach
elektrycznych
93
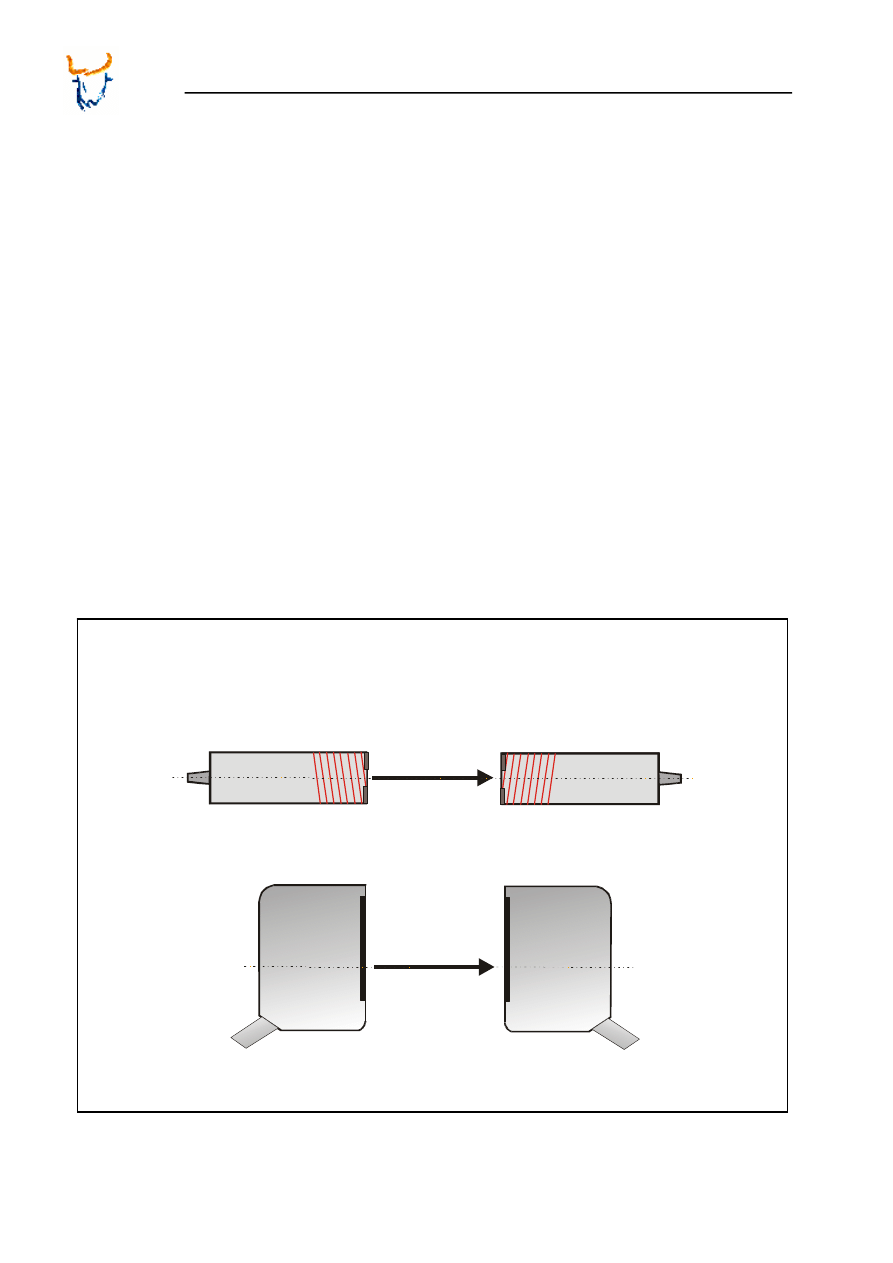
Komponenty mechatroniczne - Podręcznik
Minos
4.3
Podstawowe rodzaje czujników
4.3.1 Czujnik
przelotowy
W czujnikach o działaniu przelotowym (through beam sensors, nazy-
wanymi też thru-beam or transmitted beam), wiązka światła wysyłana
jest bezpośrednio z nadajnika do odbiornika, umieszczonych współo-
siowo w oddzielnych obudowach. Czujniki wykrywają obiekty pojawia-
jące się miedzy nadajnikiem a odbiornikiem, które przerywają bieg
promieni świetlnych i uaktywniają sygnał wyjściowy z odbiornika. Są
one bardzo mało wrażliwe na trudne warunki zewnętrzne jak: kurz w
powietrzu, brud na soczewkach, para albo mgła. Mają one najdłuższe
strefy działania (ponad 50m), w porównaniu z innymi odmianami czuj-
ników. Budowane są w dwóch podstawowych wersjach konstrukcyj-
nych, jako cylindryczne i prostopadłościenne (rys. 4.18).
Odbiornik
(R)
Emiter
(E)
a)
b)
oś
optyczna
oś
optyczna
Emiter
(E)
Odbiornik
(R)
Rys. 4.18:
Wersje konstrukcyjne czujników o działaniu przelotowym: a) w obudowie cylin-
drycznej, b) w obudowie prostopadłościennej
94
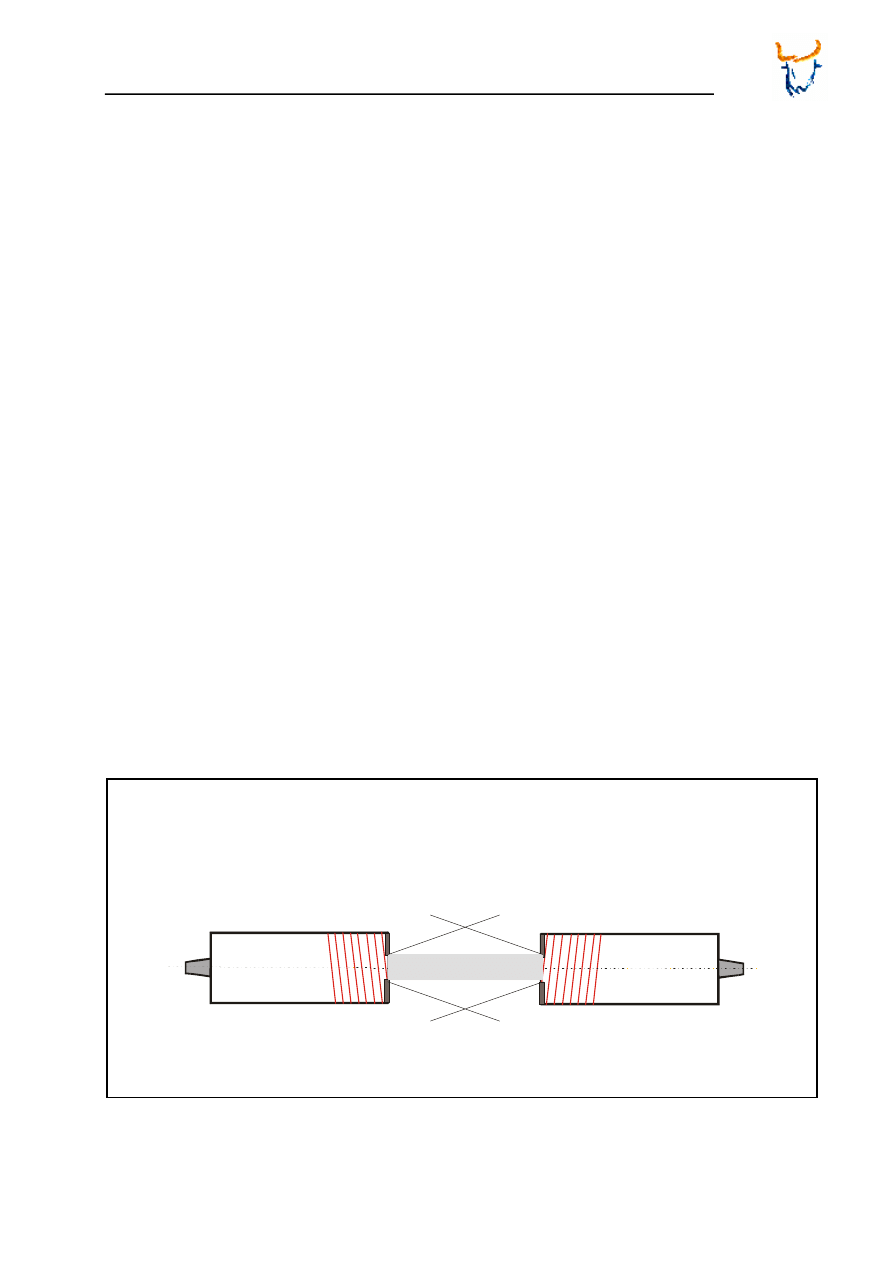
Komponenty mechatroniczne - Podręcznik
Minos
Ważną cechą tych czujników jest to, że rodzaj materiału wykrywanego
obiektu nie ma żadnego znaczenia. Mogą to więc być powierzchnie
malowane, półprzeźroczyste, przeźroczyste, chropowate, gładkie, me-
talowe, plastikowe itp.
Efektywny strumień światła zależy od średnicy soczewek w nadajniku i
odbiorniku (rys. 4.19), a czujnik wykrywa zdarzenie wtedy, gdy cel
przysłoni co najmniej 50% tego strumienia.
Odbiornik
(R)
Emiter
(E)
pole emitowane
Promień efektywny
pole widzenia odbiornika
Rys. 4.19.
Efektywny strumień światła oraz strumień emitowany przez nadajnik i pole widze-
nia odbiornika
95
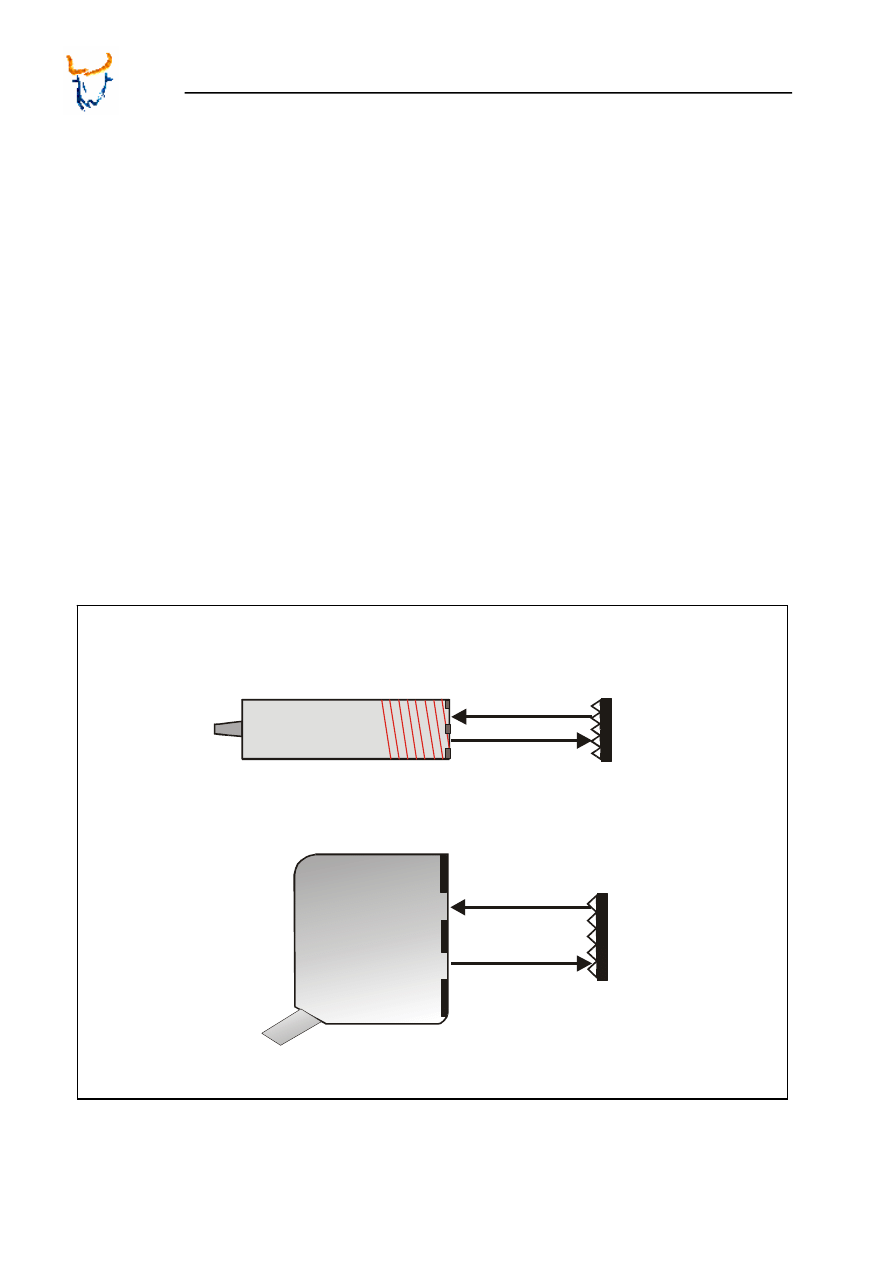
Komponenty mechatroniczne - Podręcznik
Minos
4.3.2
Czujniki refleksyjne
W czujnikach refleksyjnych (retro-reflective sensors) nadajnik i odbior-
nik umieszczone są w jednej obudowie (rys. 4.20). Za pomocą reflek-
tora światło jest kierowane z powrotem do odbiornika. Przedmiot poru-
szający się w kierunku wiązki światła rozprasza ją, co powoduje prze-
łączanie stanu wyjścia czujnika. Typowe czujniki refleksyjne wykony-
wane bez filtra polaryzującego pracują w obszarze światła podczerwo-
nego, a w układzie z filtrem polaryzującym w obszarze światła widzial-
nego, najczęściej z widzialnym światłem czerwonym. Zaletą tych czuj-
ników jest stosunkowo duży zasięg dochodzący do 12 m oraz brak
wrażliwości na własności powierzchni obiektu i na jego kolor.
Odbiornik (R)
Emiter (E)
a)
b)
Reflektor
Odbiornik (R)
Emiter (E)
Reflektor
Rys. 4.20:
Wersje konstrukcyjne czujników refleksyjnych a) w obudowie cylindrycznej, b) w
obudowie prostopadłościennej
96
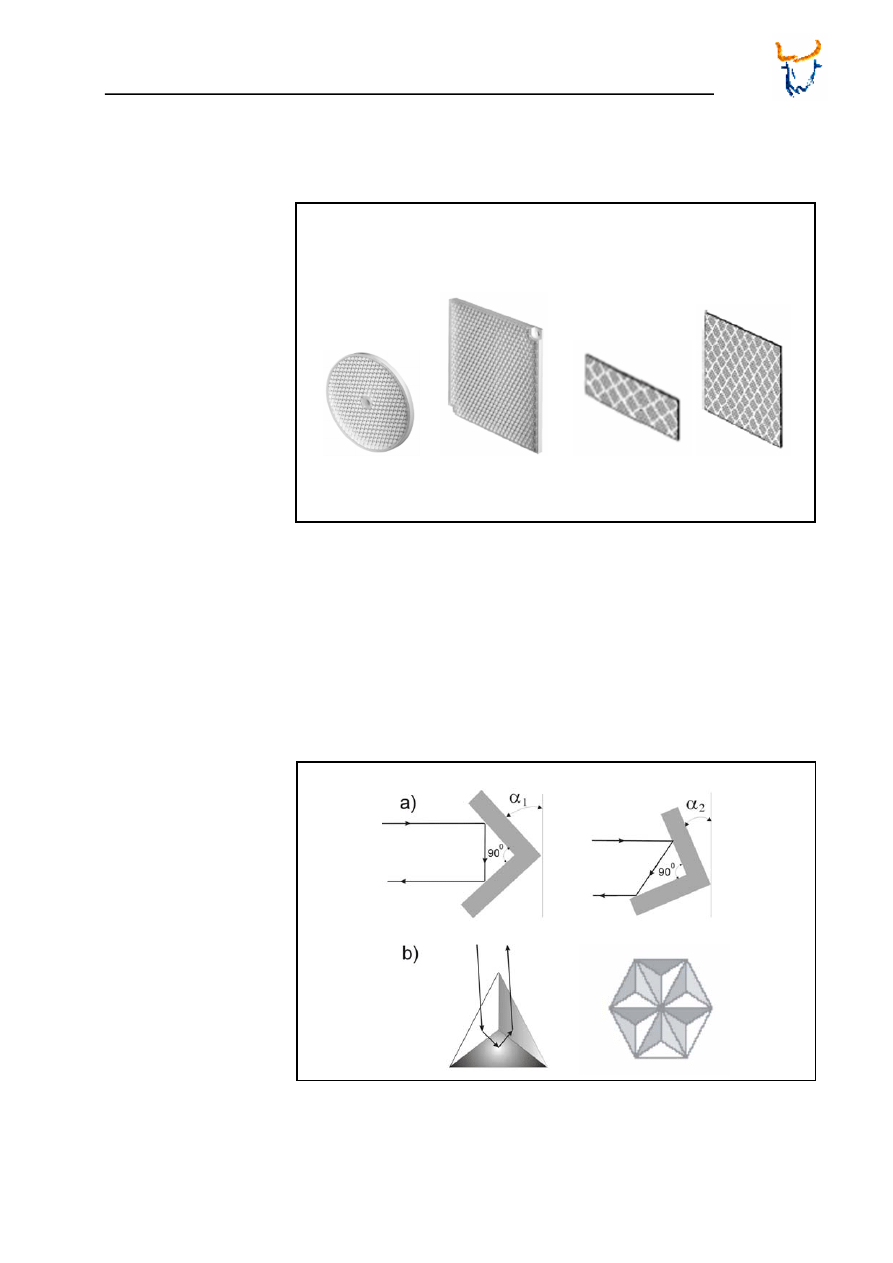
Komponenty mechatroniczne - Podręcznik
Minos
Czujniki te wymagają stosowania specjalnych konstrukcji reflektorów
(ang. reflectors) lub taśm odbijających (ang. reflective tapes)
(rys. 4.21).
a)
b)
Rys. 4.21:
Widok przykładowych: a) reflektorów, b) taśm reflek-
syjnych
.
W przeciwieństwie do zwykłego zwierciadła albo innych płaskich po-
wierzchni odbijających, reflektory te nie muszą być ustawione dokład-
nie prostopadle do sensora. Błąd ustawienia w granicach kilkunastu
stopni nie wpływa na poprawność pracy czujnika (rys. 4.22a).
Rys. 4.22
Odbicie światła: a) w układzie dwóch zwierciadeł, b) w
układzie trzech zwierciadeł (triple mirrors) ustawionych
prostopadle do siebie oraz widok ich zespołu
97
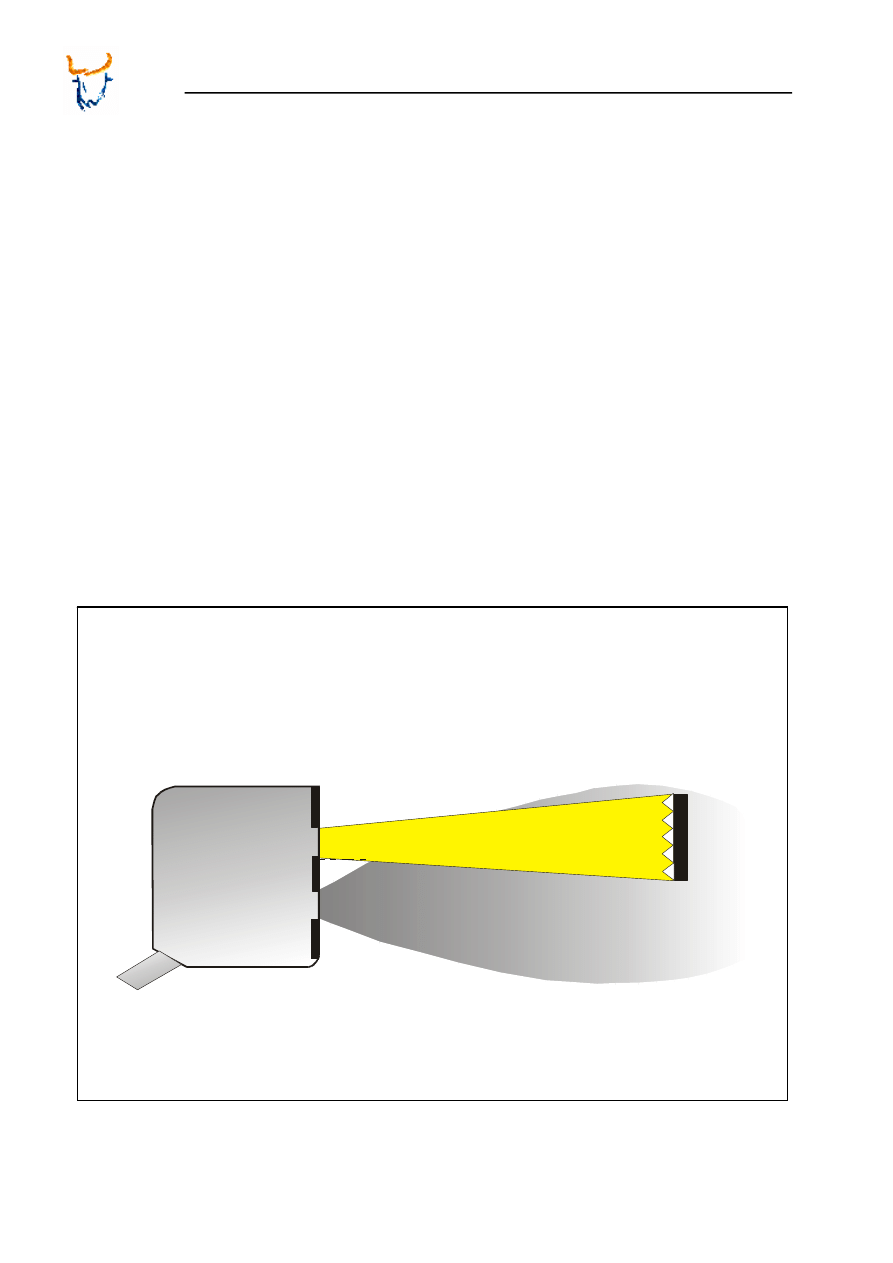
Komponenty mechatroniczne - Podręcznik
Minos
Dwuwymiarowe prawo odbicia wstecznego (retro-reflective) obowiązu-
je również w przestrzennym układzie trzech luster, które są ustawione
pod kątem prostym, jedno do drugiego (rys. 4.22b). Promień światła
wchodzący do tego układu jest całkowicie odbijany przez wszystkie
trzy powierzchnie i wychodzi równolegle do promienia padającego.
Elementarne układy trzech luster (triple mirrors) zestawione w zespoły,
tworzą powierzchnię reflektorów dla czujników refleksyjnych.
Efektywny strumień światła zależy od średnicy soczewek w nadajniku i
odbiorniku oraz od wielkości powierzchni reflektora (rys. 4.23).
Odbiornik (R)
Emiter (E)
Wiązka efektywna
Reflektor
Wiązka emitowana
Rys. 4.23
Ef
e
ktywny strumień światła czujnika refleksyjnego oraz strumień emito-
wany przez nadajnik
98
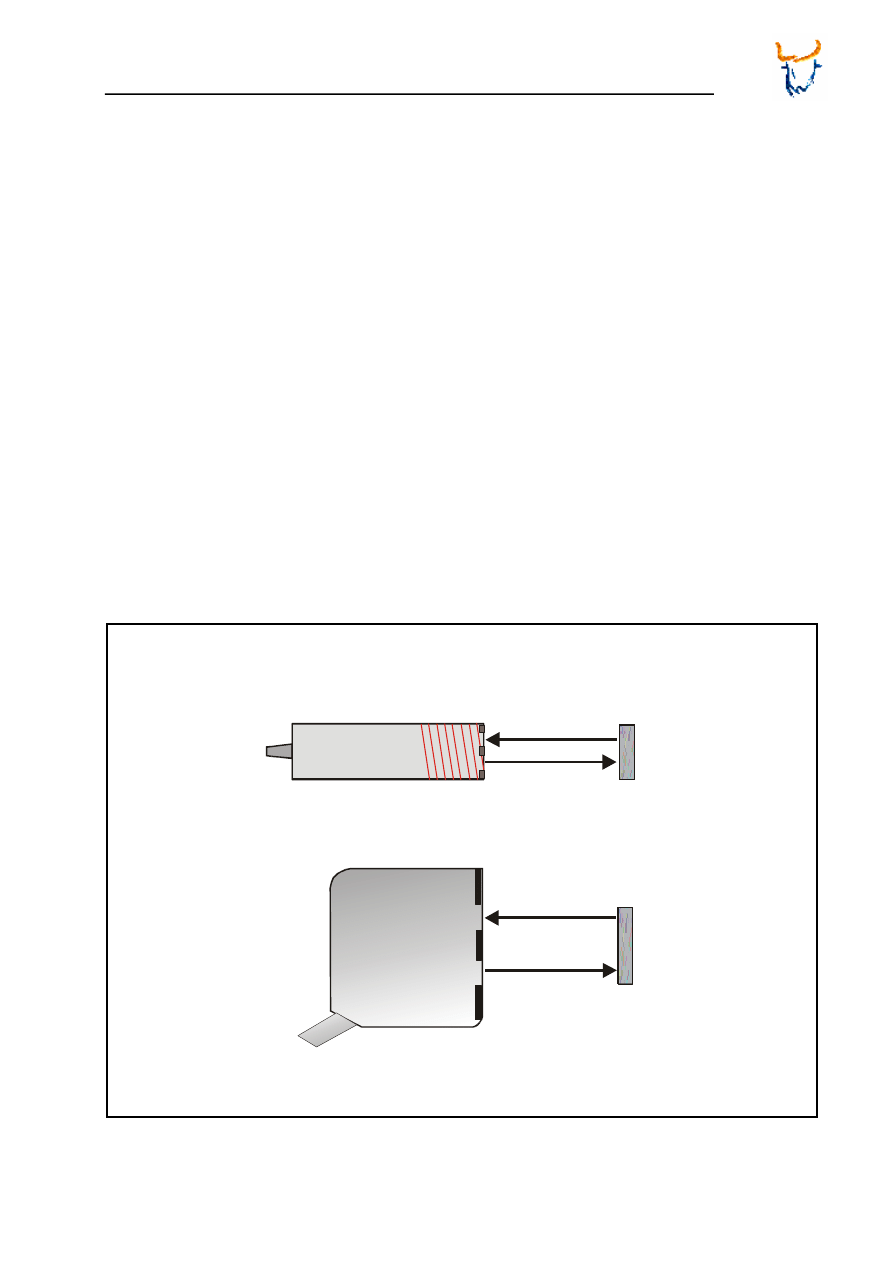
Komponenty mechatroniczne - Podręcznik
Minos
4.3.3 Czujniki
dyfuzyjne
Czujniki dyfuzyjne (diffuse sensors), nazywane też odbiciowe lub zbli-
żeniowe (reflex or proximity sensors), służą do bezpośredniego wy-
krywania przedmiotów. Ich podstawową zaletą, oprócz umieszczenia
nadajnika i odbiornika w jednej obudowie, jest rezygnacja, w porówna-
niu z czujnikami reflesyjnymi, z konieczności montażu reflektora (rys.
4.24). Nadajnik emituje światło, które odbite od przedmiotu trafia do
odbiornika i w efekcie tego generowany jest sygnał wykrycia celu.
Odbiornik (R)
Emiter (E)
a)
b)
Obiekt
Odbiornik (R)
Emiter (E)
Obiekt
Rys. 4.24:
Podstawowe wersje konstrukcyjne czujników dyfuzyjnych: a) w obudowie cylin-
drycznej, b) w obudowie prostopadłościennej
99

Komponenty mechatroniczne - Podręcznik
Minos
100
Czujniki dyfuzyjne mają niewielki zasięg roboczy (operating distance),
w granicach do 100mm, a niekiedy do 200mm. Przedmioty lub tło
znajdujące się poza tym zasięgiem nie są wykrywane, czyli ich zakłó-
cające oddziaływanie jest automatycznie tłumione. Pewien wpływ na
zasięg roboczy ma kolor jak i typ powierzchni. W zależności od wła-
sności przedmiotu współczynnik odbicia światła od celu może zmie-
niać się w szerokich granicach. Lśniące powierzchnie znajdujące się
nawet daleko od czujnika mogą odbić większość światła, sprawiając,
że wykrywanie właściwego celu może okazać się bardzo trudne. Po-
nadto czoło czujnika musi być możliwie dokładnie równoległe do po-
wierzchni celu odbijającego światło. Przedmioty ciemne lub matowe
mogą pochłonąć większość światła i pozostała odbijana ilość światła
może nie wystarczyć do wykrycia celu. W takich przypadkach można
posłużyć się specjalnymi odmianami czujników dyfuzyjnych omówio-
nymi w dalszej części.
Do wyznaczenia maksymalnej odległość wykrywania czujnika dyfuzyj-
nego stosuje się skalibrowaną rozpraszającą powierzchnię celu, którą
jest arkusz białego papieru lub papier firmy Kodak, odbijający około
90% strumienia światła.
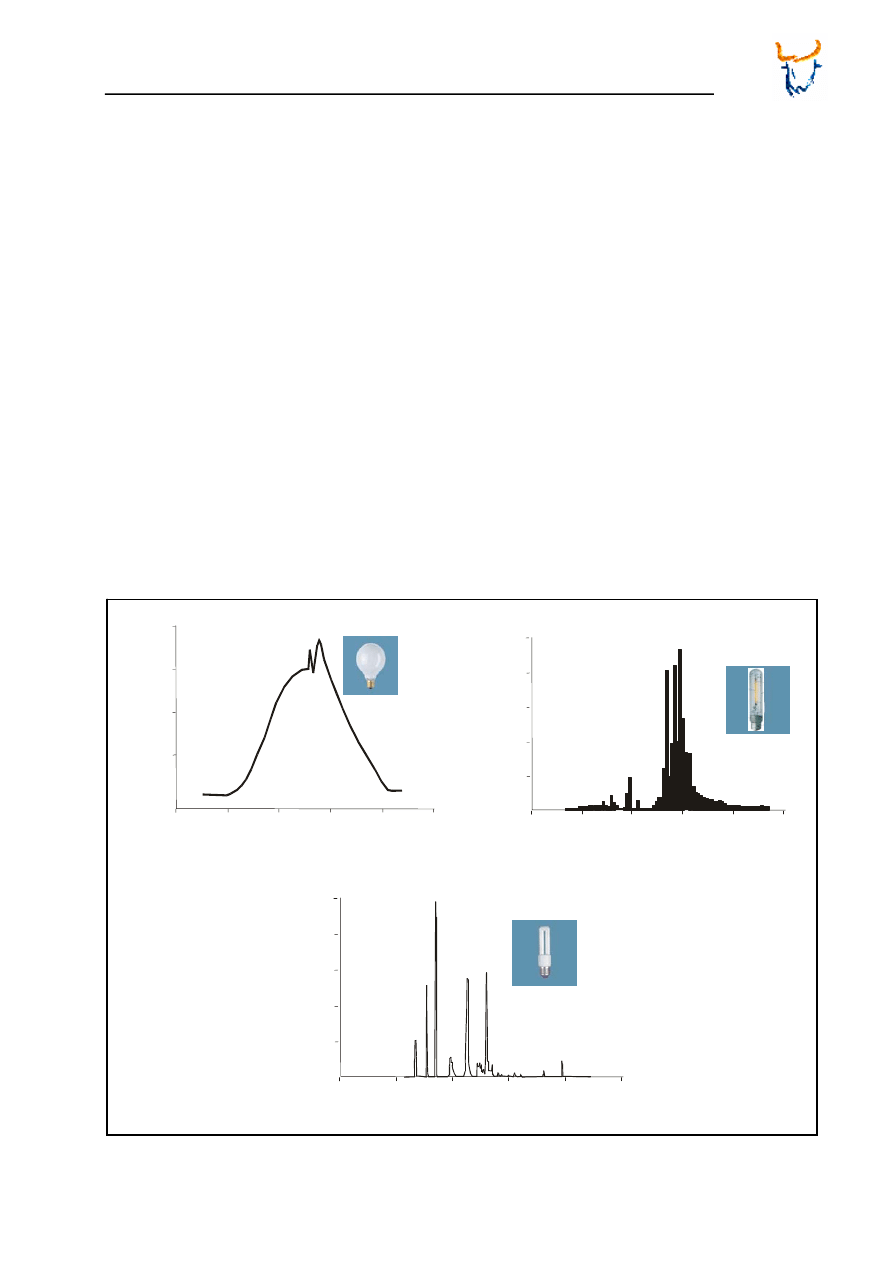
Komponenty mechatroniczne - Podręcznik
Minos
4.4 Przetwarzanie
sygnału
4.4.1
Źródła zakłóceń interferencyjnych
Czujniki fotoelektryczne z uwagi na zasadę pracy są wrażliwe na za-
kłócenia spowodowane interferencją optyczną od zewnętrznych źródeł
światła, naturalnych jak i sztucznych. Promienie świetlne docierające
od tych źródeł światła do czujników fotoelektrycznych mogą w istotny
sposób wpływać na natężenie prądu wytwarzanego przez emiter, a
tym samym spowodować błędne sygnały wyjściowe z czujnika. Aby
ograniczyć prawdopodobieństwo błędnych reakcji, czujniki są wyposa-
żane w układy eliminujące w pewnym zakresie tego typu zakłócenia i
szumy oraz układy dostrajające odpowiednio czułość czujnika. Dodat-
kowe problemy może stanowić zanieczyszczenie środowiska, np. olej,
pył, brud zalegający na powierzchniach wykrywanych przedmiotów lub
na soczewkach nadajnika i odbiornika. Przykładowe źródła światła
sztucznego i ich charakterystyki widmowe pokazuje rys. 4.25.
żarówka
Długość fali
[nm]
λ
100
300
500
700
900
1100
in
te
n
sy
w
n
o
ś
ć
(j
ed
n
o
s
tk
i w
zgl
ędn
e)
1
2
3
4
a)
lampa sodowa
Długość fali
[nm]
λ
300
400
500
600
700
800
in
te
ns
yw
no
ść
(j
ed
no
s
tki w
zg
lę
dn
e
)
2
4
6
8
10
b)
lampa jarzeniowa
długość fali
[nm]
λ
100
300
500
700
900
1100
In
te
n
s
ywn
o
ść
(j
ed
no
s
tki
wzg
lę
dn
e)
2
4
6
8
10
c)
Rys. 4.25:
Widmo promieniowania: a) żarówki, b) lampy sodowej, c) lampy jarzeniowej
101

Komponenty mechatroniczne - Podręcznik
Minos
102
Spektrum promieniowania żarówki jest szerokie a maksymalne natę-
żenie promieniowania przypada na 600 do 700 nm. Ze składu widmo-
wego światła wysokoprężnych lamp sodowych widać z kolei, że więk-
szość promieniowania jest emitowana w zakresie długości fal 550 –
640 nm, zbliżonym do zakresu LED świecącej światłem czerwonym.
Widmo lampy jarzeniowej składa się natomiast głównie z kilku dominu-
jących linii oraz ze słabej składowej znajdującej się w obszarze od 570
do 700 nm.
Czujniki dyfuzyjne należą do najbardziej podatnych na zakłócenia
spowodowane interferencją optyczną, pochodzącą od światła natural-
nego o stałym natężeniu lub światła sztucznego zbliżonego do zakresu
widma światła naturalnego, a także światła o zmiennym natężeniu
(światło migające).
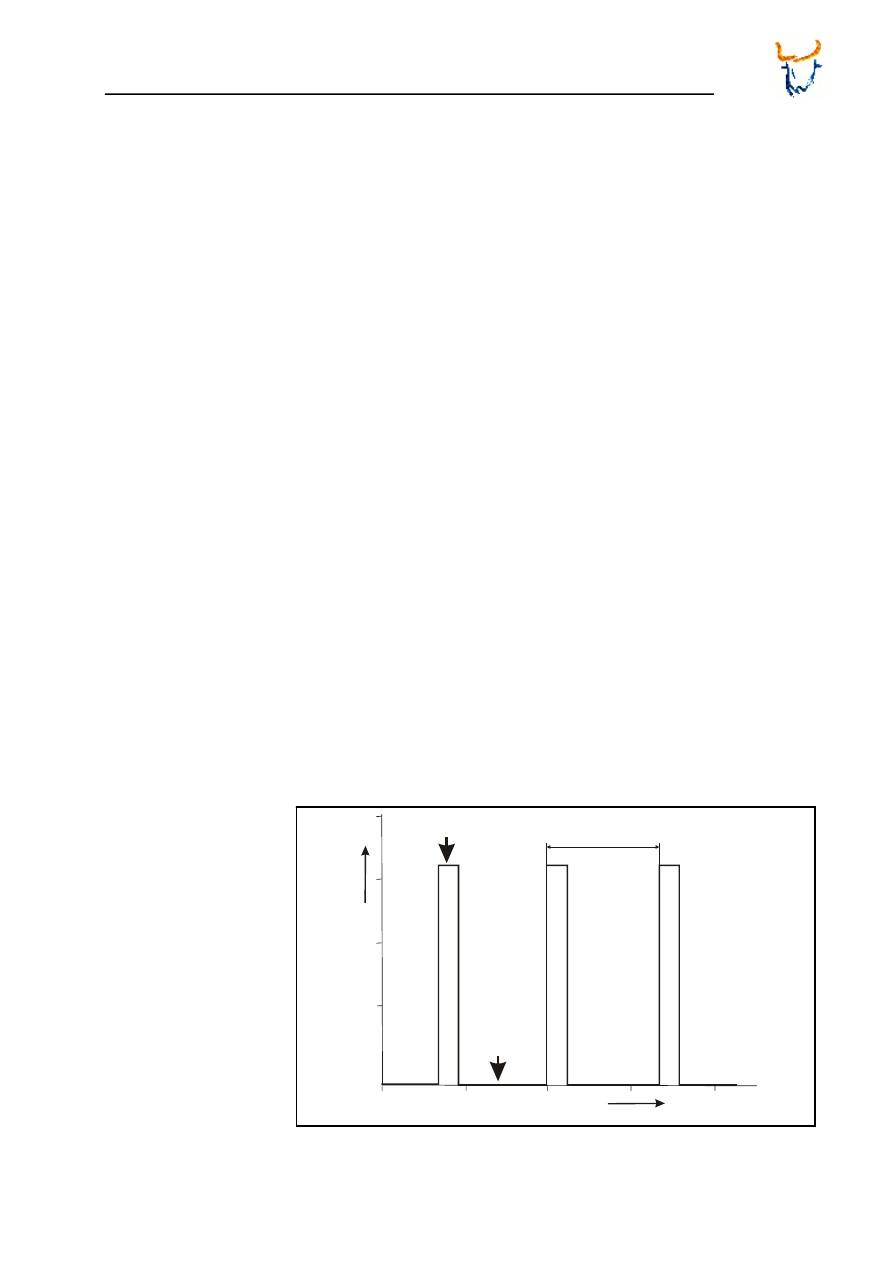
Komponenty mechatroniczne - Podręcznik
Minos
4.4.2 Zapobieganie
interferencji
4.4.2.1 Modulacja
światła
Czujniki fotoelektryczne działają ze światłem modulowanym, które
sprawia, że są one w dużej mierze nieczułe na otaczające światło.
Oznacza to, że światło emitera jest włączane tylko na krótki okresu
czasu, wielokrotnie krótszy niż trwa przerwa między impulsami (rys.
4.26). Częstotliwość tak modulowanego sygnału świetlnego jest rzędu
kilku kHz. Niebezpieczeństwo wystąpienia interferencji z innym źró-
dłem światła może jednak wystąpić w przypadkach, gdy emiter i źródło
zakłócające będą pracowały z podobnymi częstotliwościami. Praca z
modulowanym światłem dostarcza następujących korzyści:
- czujniki są mniej czułe na otaczające światła,
- zwiększa się maksymalny zakres działania czujnika,
- zmniejsza się ilość generowanego ciepła, co przedłuża czas życia
diod LED.
Źródła światła LED (emitters) jak i odbiorniki (receivers) wyposażane
są w soczewki optyczne pozwalające na zawężanie emitowanego
strumienia światła oraz zawężanie pola widzenia odbiornika. Dzięki
temu można ograniczać zakres reagowania czujnika, a tym samym
zmniejszać wpływ promieniowania odbitego od przedmiotów znajdują-
cych się poza wyznaczonym obszarem. Równocześnie skupienie
światła przez soczewki znacznie zwiększa maksymalną odległość
między nadajnikiem a odbiornikiem lub nadajnikiem a powierzchnią, od
której światło jest odbijane. W niektórych zastosowaniach korzystniej-
sze mogą być elementy fotooptyczne bez soczewek (płaskie przeźro-
czyste okno), gdy potrzebne jest szerokie pole widzenia i krótki zasięg.
Emiter ON
czas
za
si
la
ni
e
e
mi
te
ra
Emiter OFF
T=1/f
Rys. 4.26:
Zasilanie emitera napięciem modulowanym
103

Komponenty mechatroniczne - Podręcznik
Minos
104
4.4.2.2 Polaryzacja światła
Standardowy czujnik refleksyjny (retro-reflective sensor) może spowo-
dować nieuzasadnioną reakcję w układzie wyjściowym w momencie
pojawienia się elementu błyszczącego w jego polu widzenia. Aby wy-
różnić odbicie światła od właściwego elementu wykrywanego spośród
innych odbieranych sygnałów świetlnych konieczne może okazać się
zastosowanie światła spolaryzowanego.
Polaryzacja polega na całkowitym lub częściowym uporządkowaniu
drgań fali świetlnej. Gdy światło nie jest spolaryzowane, drgania pola
elektrycznego i magnetycznego odbywają się w wielu kierunkach, na-
tomiast w przypadku światła spolaryzowanego, drgania te odbywają
się tylko w jednym kierunku.
Światło naturalne, w tym też światło emitowane przez diody LED, nie
jest spolaryzowane. Kiedy światło przejdzie jednak przez filtr polaryzu-
jący - pozostaje tylko ta część strumienia, która jest zgodna z kierun-
kiem polaryzacji zastosowanego filtru. Na rysunku 4.27a widoczna jest
wiązka światła po przejściu przez filtr o polaryzacji poziomej. Ustawie-
nie następnie na jej drodze filtru o polaryzacji pionowej spowoduje cał-
kowite wygaszenie wiązki światła.
Odbicie dyfuzyjne (rozproszone) niszczy polaryzację (rys. 4.27b), a
niewielka ilość światła przechodząca przez polaryzator pionowy ma już
bardzo małą energię, zwykle niewystarczającą do wykrycia powierzch-
ni odbijającej światło.
Odbicie spolaryzowanego światła od powierzchni lustrzanej (rys.
4.27c) nie niszczy polaryzacji, a polaryzator pionowy ustawiony na
drodze strumienia światła nie pozwala na przejście światła.
Te dwa zjawiska pozwalają wykorzystać światło spolaryzowane w
czujnikach refleksyjnych z reflektorem. Za pomocą doboru i ustawienia
odpowiednich filtrów możliwe jest uniknięcie zakłóceń spowodowanych
przez powierzchnie zwierciadlane, jak też wykrywanie elementów
przezroczystych. Filtry polaryzacyjne wykonuje się najczęściej z folii
polimerowych.
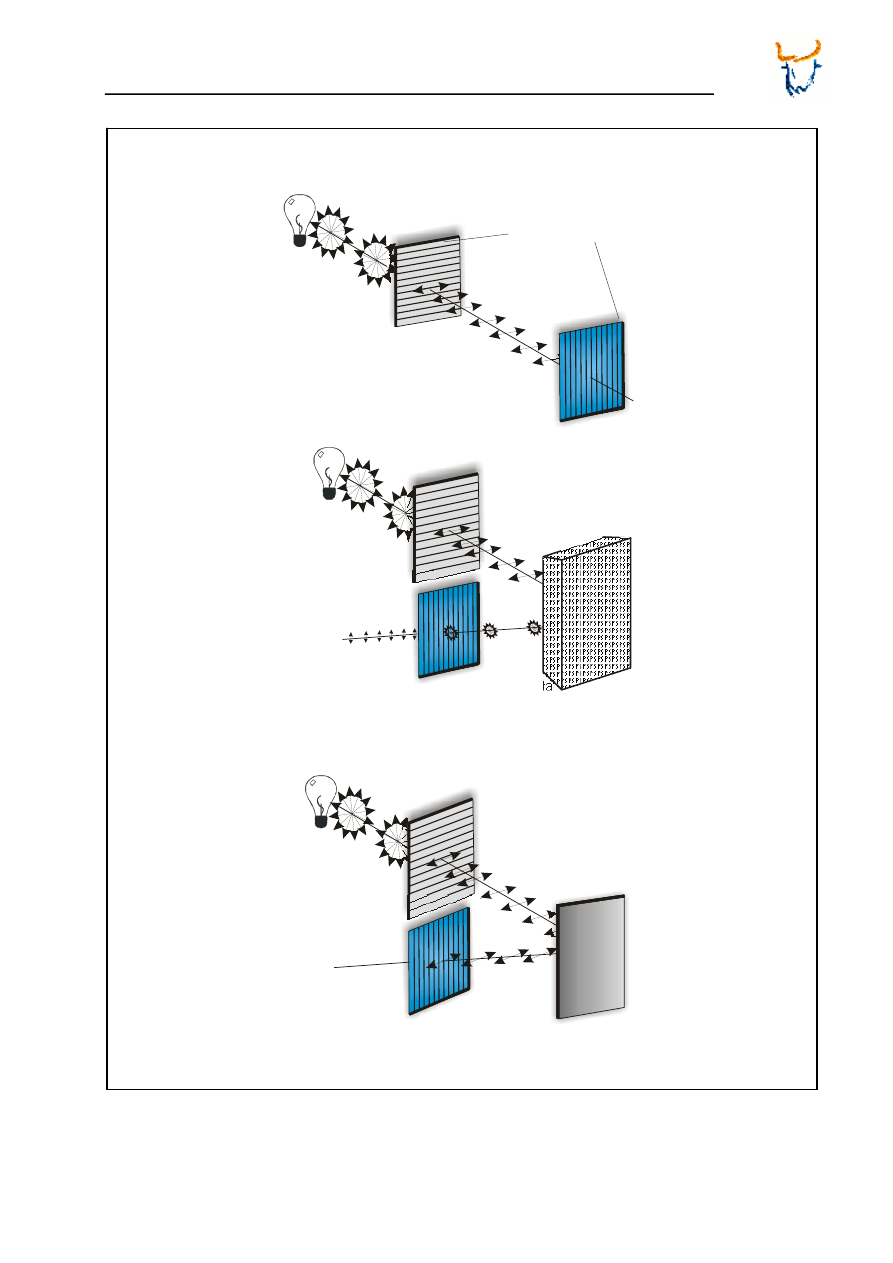
Komponenty mechatroniczne - Podręcznik
Minos
Źródło
światła
Światło białe
Filtry polaryzujące
Powierzchnia dyfuzyjna
b)
Światło spolaryzowane
Filtry polaryzujące
Depolaryzacja światła
Powierzchnia lustrzana
c)
a)
Źródło
światła
Źródło
światła
Światło białe
Światło białe
Światło
spolaryzowane
Filtry polaryzujące
Światło spolaryzowane
Rys. 4.27:
Polaryzacja światła z pomocą filtrów: a) wygaszanie światła za pomocą dwóch
filtrów, b) odbicie światła spolaryzowanego od powierzchni rozpraszającej, c) od-
bicie światła spolaryzowanego od powierzchni lustrzanej
105
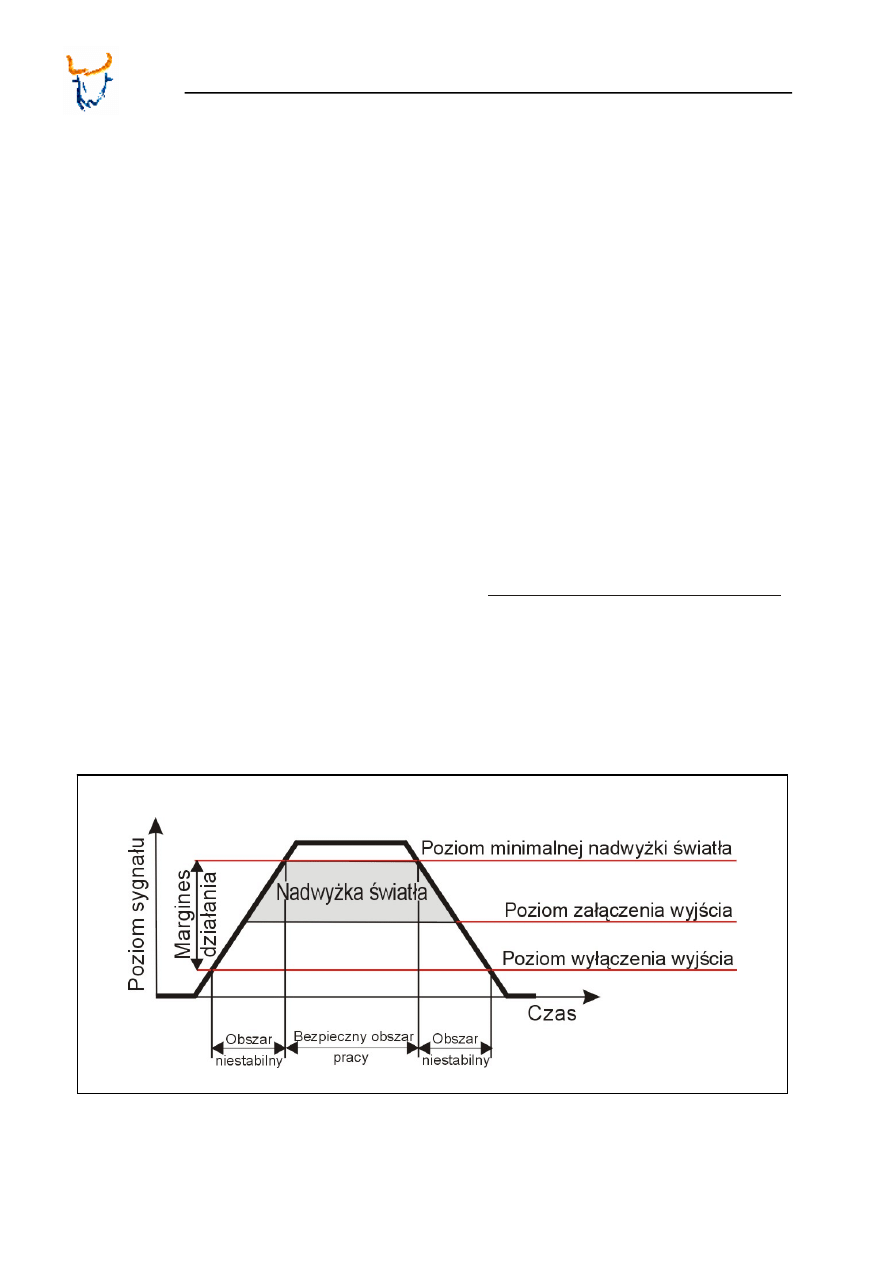
Komponenty mechatroniczne - Podręcznik
Minos
4.4.3
Margines działania
Ilość światła padającą na element fotoelektryczny czujnika, a tym sa-
mym poziom sygnału na jego wyjściu może w wyniku oddziaływań ze-
wnętrznych ulec zmniejszeniu np. w wyniku zabrudzenia optyki czujni-
ka, zmiany współczynnika odbicia światła od przedmiotu lub starzeniu
się emitera. Wówczas poziom sygnału może okazać się niewystarcza-
jący do przełączenia stanu wyjścia, co spowoduje niepoprawną pracę
czujnika. Aby unikać takich sytuacji powinno dysponować się pewną
nadwyżką poziomu sygnału, określaną przez margines działania (rys.
4.28).
Kiedy na odbiornik w ogóle nie pada światło wówczas margines dzia-
łania równa się zero. Margines działania równy 1 odpowiada sytuacji,
gdy ilość padającego na odbiornik światła jest już wystarczająca, aby
przełączyć stan wyjścia (z OFF na ON albo z ON na OFF). Aby dys-
ponować pewną rezerwą wartość tego marginesu powinna być więk-
sza od 1 - co oznacza, że rzeczywista ilość padającego światła prze-
kracza minimalny poziom wymagany do przełączenia stanu wyjścia.
Definiuje ją zależność:
Margines Działania=
Aktualna ilość wykrywanego światła
Minimalna ilość światła
wymagana do zmiany stanu wyjścia
Rys. 4.28:
Zależność bezpiecznego obszaru pracy czujnika fotoelektrycznego od marginesu
działania
106
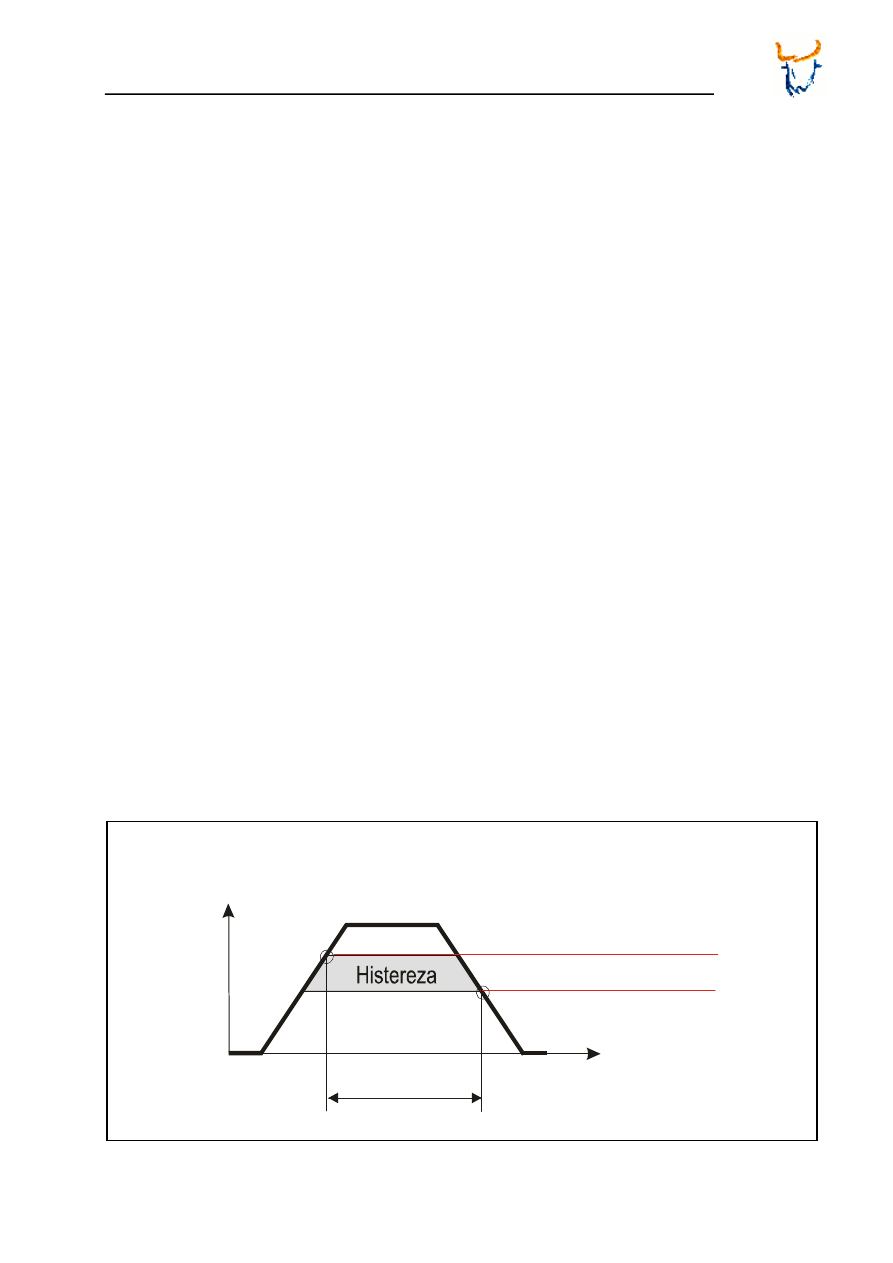
Komponenty mechatroniczne - Podręcznik
Minos
Jeśli ogólne warunki, w jakich pracuje czujnik są znane, to wyznaczo-
na z powyższego wzoru wymagana nadwyżka światła stanowi zabez-
pieczenie przed nadmiernym tłumieniem energii światła padającego na
odbiornik. Im ta nadwyżka będzie większa tym praca czujnika będzie
bardziej niezawodna. W aplikacjach, w których ryzyko przypadkowego
zmniejszenia się ilości światła padającego na odbiornik jest duże, wy-
magany jest większy margines działania niż w aplikacjach, w których
jest to mniej prawdopodobne. Dla czystego powietrza oraz małego
prawdopodobieństwa zabrudzenia soczewek czy reflektora minimalny
margines działania nie powinien być mniejszy od 1,5. W warunkach
środowiska bardzo zabrudzonego i przy ograniczonych możliwościach
czyszczenia soczewek minimalny margines działania powinien prze-
kraczać nawet 50.
Obwód wykrywania nadwyżki światła w czujniku, wyposażony np. w
migającą diodę, sygnalizuje niestabilne warunki pracy, gdy ilość świa-
tła padającego na czujnik jest niewystarczająca, tj. spada poniżej war-
tości wymaganej do zmiany stanu wyjścia.
Dla czujników dyfuzyjnych pewne znaczenie może mieć też zróżnico-
wanie poziomów sygnału potrzebnych do załączenia obwodu wyjścio-
wego i jego wyłączenia, czyli histereza (rys. 4.29). Odległość robocza
czujnika od obiektu wykrywanego zawsze odnosi się do poziomu sy-
gnału w punkcie załączenia (switch ON).
Po
zi
om
s
ygn
ał
u
Czas
Poziom załączenia wyjścia ON
Poziom wyłączenia wyjścia OFF
Wyjście załączone
Rys. 4.29:
Histereza przełączania czujnika typu dyfuzyjnego
107
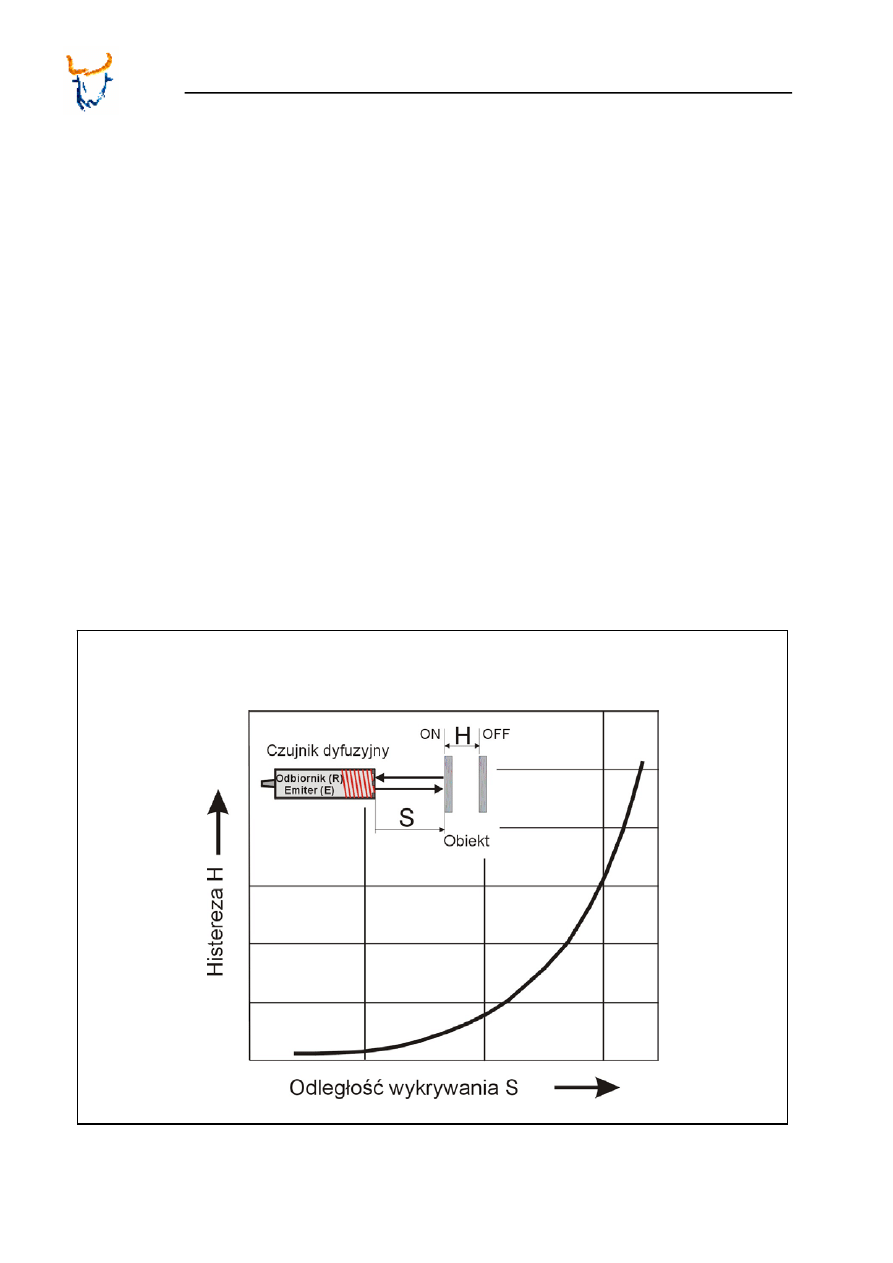
Komponenty mechatroniczne - Podręcznik
Minos
Histereza zwiększą się wraz z oddalaniem się wykrywanego przedmio-
tu od czujnika (rys.4.30).
Rys. 4.30:
Zależność wielkości histerezy od odległości między czujnikiem typu dyfuzyjnego a
wykrywanym obiektem
108
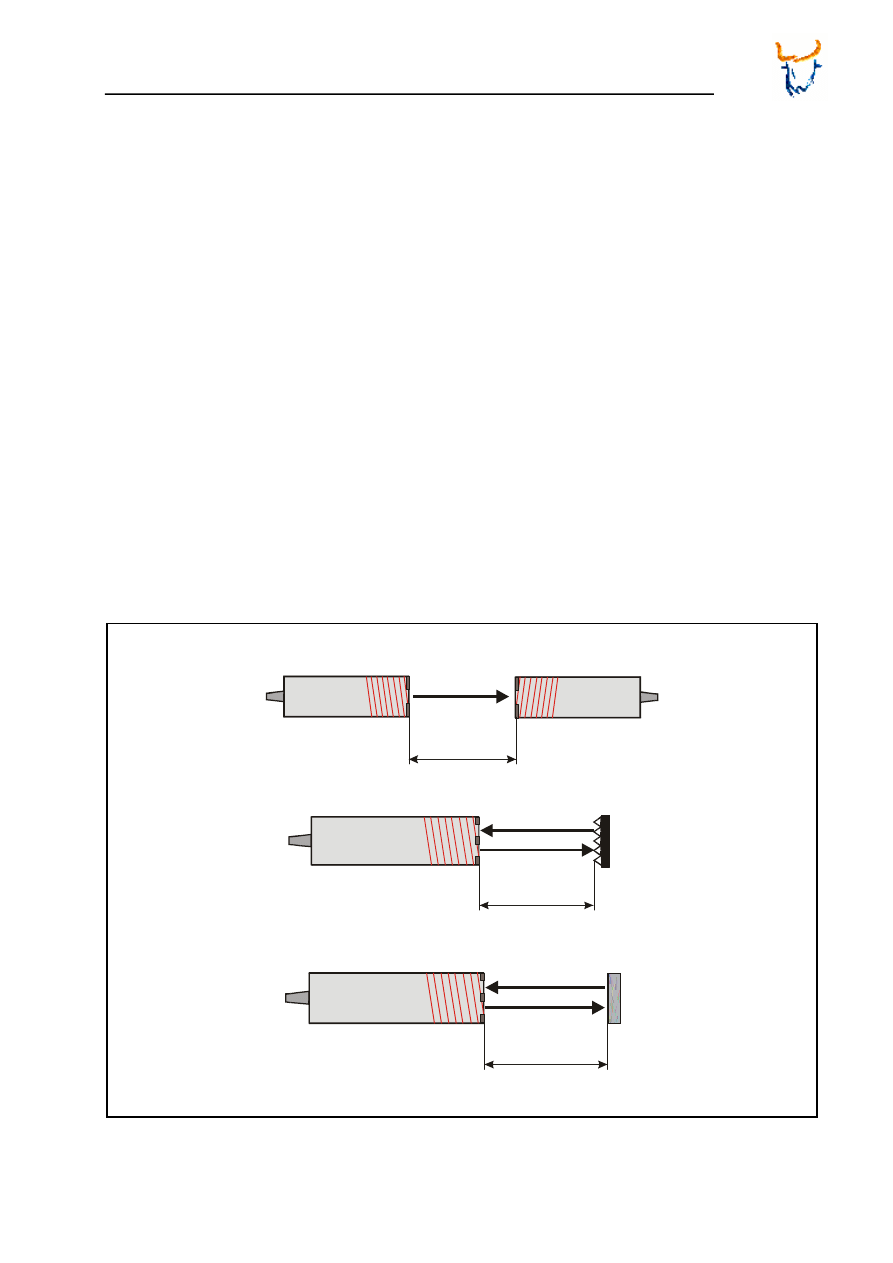
Komponenty mechatroniczne - Podręcznik
Minos
4.4.4 Odległość robocza
Ważną cechą czujników fotoelektrycznych zbliżeniowych jest ich za-
sięg działania, wyznaczony przez maksymalną odległość roboczą. Dla
czujników przelotowych jest to maksymalna odległość między emite-
rem a odbiornikiem, dla czujników refleksyjnych odległość między
czujnikiem i reflektorem, a dla czujników dyfuzyjnych odległość między
czujnikiem a standardowym przedmiotem (rys.4.31). We wszystkich
przypadkach odpowiada ona maksymalnej użytecznej odległości de-
tekcji.
Odbiornik
(R)
Emiter
(E)
a)
Max. odległość
detekcji
Odbiornik (R)
Emiter (E)
b)
Reflektor
Max. odległość
detekcji
Odbiornik (R)
Emiter (E)
c)
Obiekt
Max. odległość
detekcji
Rys.4.31:
Maksymalna
odległość detekcji: a) czujnik przelotowy, b) czujnik refleksyjny, c)
czujnik dyfuzyjny
109
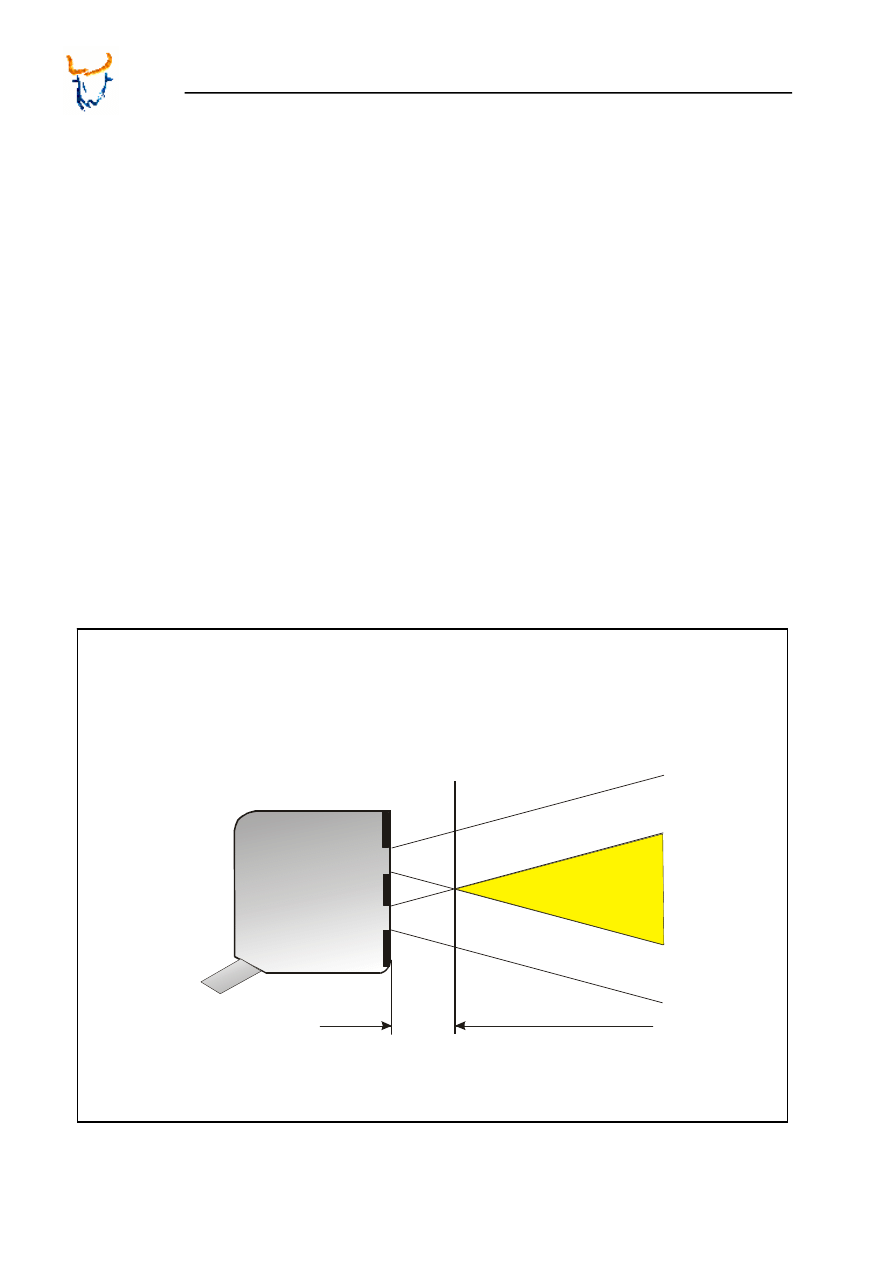
Komponenty mechatroniczne - Podręcznik
Minos
Ze względu na konstrukcję czujników refleksyjnych i dyfuzyjnych, w
których emiter i odbiornik umieszczone są w jednej obudowie występu-
je też minimalna odległość detekcji, poniżej której przedmiot już nie
może zostać wykryty (rys. 4.32).
Odbiornik (R)
Emiter (E)
Minimalna
odległość detekcji
martwa
strefa
Rys.4.32:
Minimalna odległość detekcji w czujnikach interferencyjnych i dyfuzyjnych
110
Komponenty mechatroniczne - Podręcznik
Minos
4.4.5
Czas reakcji
W aplikacjach, w których mają być wykrywane bardzo małe przedmio-
ty, lub przedmioty poruszające się z dużymi prędkościami, istotne zna-
czenie może mieć „czas reakcji” (Response time) zastosowanego
czujka fotoelektrycznego – czujnik musi zdążyć zareagować, czyli
przełączyć stan wyjścia z ON na OFF lub z OFF na ON.
Czas reakcji jest czasem liczonym od pojawienia się wiązki światła
między emiterem i odbiornikiem, do zmiany stanu wyjścia przełączni-
ka. Czas potrzebny na zmianę stanu wyjścia po usunięciu wykrytego
obiektu nazywany jest „czasem wyzwalania” (Release time). Te czasy
nie zawsze są sobie równe.
Wartości maksymalne czasów reakcji/wyzwalania podawane są w da-
nych technicznych dla każdego typu i rodzaju czujnika, jednak pewne
odchylenia od podawanych wartości są nieuniknione. Powodem tych
odchyleń jest impulsowe zasilanie emitera, którego częstotliwość trud-
no jest zsynchronizować z ruchem wykrywanego przedmiotu.
Znajomość czasu reakcji może pomóc w określeniu, jak długo poru-
szający się przedmiot musi pozostawać w polu widzenia czujnika, aby
został wykryty przez czujnik - czyli z jaką maksymalnie prędkością mo-
że się poruszać lub też jak duże odstępy między kolejnymi przedmio-
tami muszą być przewidziane. Możną to sprawdzić korzystając ze
wzoru na obliczanie czasu pozostawania wykrywanego przedmiotu w
polu widzenia czujnika.
Czas przesuwania się
przedmiotu przed czujnikiem
Szerokość przedmiotu
Prędkość liniowa przedmiotu
=
Tak obliczony czas powinien być wyraźnie dłuższy od wartości katalo-
gowych „czasu reakcji” zastosowanego czujnika.
Jeśli odstępy między wykrywanymi przedmiotami są mniejsze od sze-
rokości obiektu to bardziej krytycznym będzie czas przebywania prze-
rwy w polu widzenia czujnika, wyznaczany ze wzoru:
Czas przesuwania się
odstepu przed czujnikiem
Szerokość odstępu
Prędkość liniowa przedmiotu
=
Wówczas tak wyznaczony czas powinien być również wyraźnie dłuż-
szy od wartości katalogowych „czasu reakcji” zastosowanego czujnika.
111
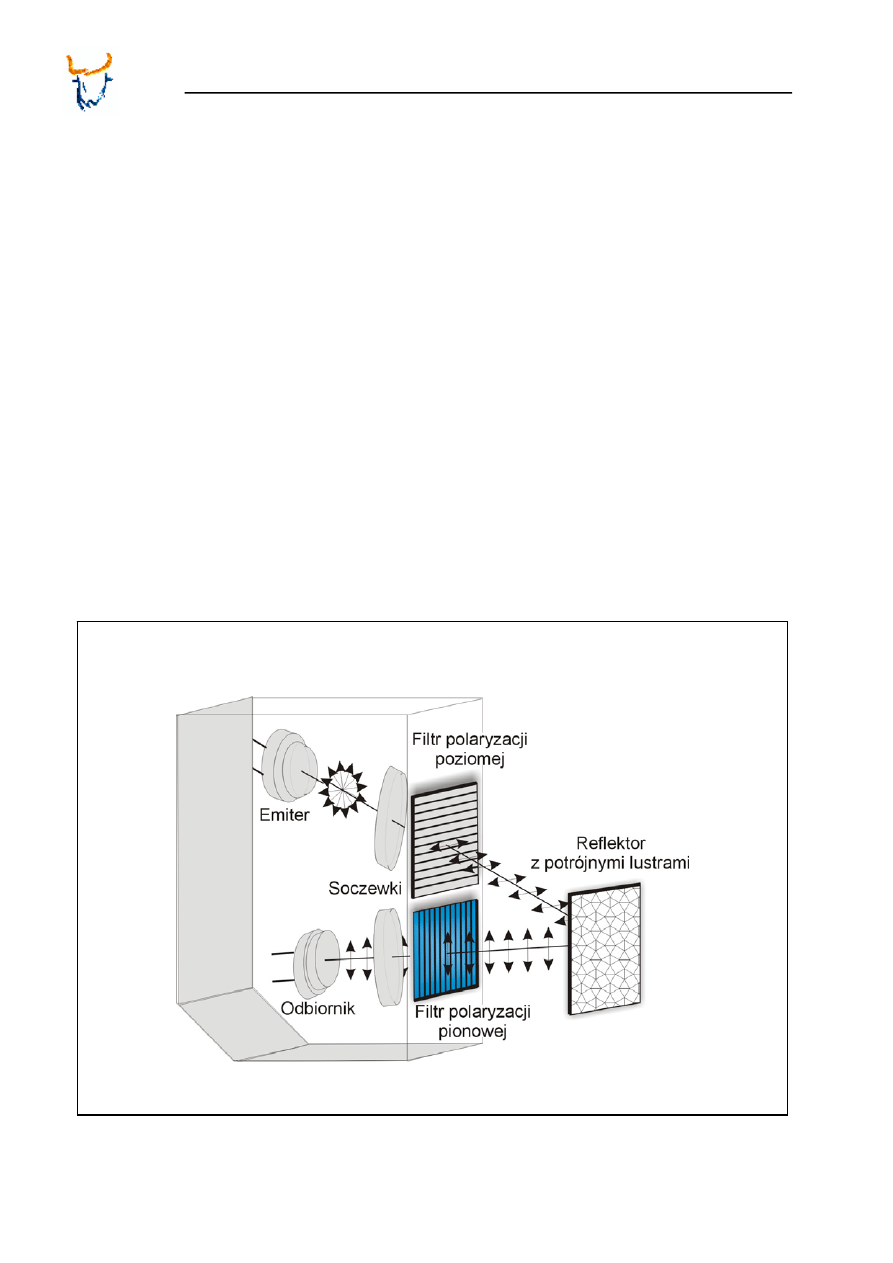
Komponenty mechatroniczne - Podręcznik
Minos
4.5
Specjalne rodzaje czujników
4.5.1
Czujniki refleksyjne z polaryzacją światła
W czujnikach refleksyjnych wykorzystujących zjawisko polaryzacji,
światło emitera skupiane jest przez soczewkę i kierowane przez filtr
polaryzacji poziomej na reflektor z potrójnymi lustrami (rys.4.33). Po-
trójne lustra stosowane w reflektorach mają dodatkową ważną cechę,
gdyż zmieniają polaryzację promienia światła o 90
o
. Część odbitych od
reflektora promieni światła dociera do odbiornika przechodząc przez
drugi filtr o polaryzacji pionowej. Filtry są dobrane i ustawione tak, że
tylko światło odbite od reflektora dociera do odbiornika a nie światło
odbite od innych przedmiotów znajdujących się w zasięgu czujnika.
W czujnikach pracujących ze światłem spolaryzowanym należy liczyć
się z pewnymi stratami intensywności emitowanego światła spowodo-
wanymi przez filtry polaryzujące. Efektem tego jest o 30% – 40% krót-
szy ich zasięg niż standardowych czujników refleksyjnych. Jako źródła
światła stosowane są na ogół diody LED emitujące światło widzialne
czerwone.
Rys. 4.33:
Czujnik refleksyjny z polaryzacją światła i zespołem potrójnych zwierciadeł
112
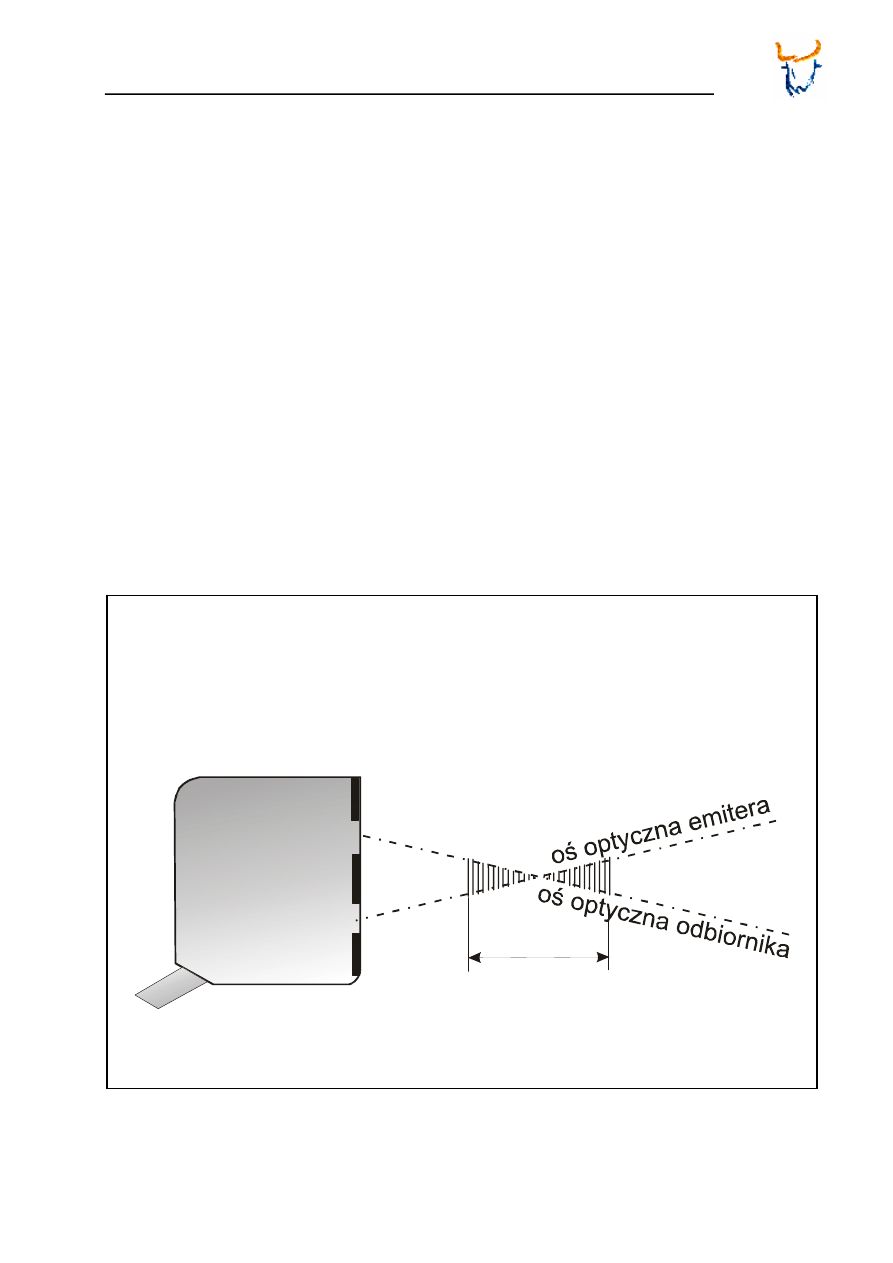
Komponenty mechatroniczne - Podręcznik
Minos
4.5.2 Czujniki dyfuzyjne z eliminacja wpływu tła i pierwszego planu
Szereg typów czujników dyfuzyjnych ma możliwość ustawiania (sen-
ding windows) maksymalnej i minimalnej odległości, z jakiej jeszcze są
wykrywane obiekty (rys. 4.34). Nie ma to związku z czułością odbiorni-
ka, lecz realizowane jest przez mechaniczną zmianę ustawienia so-
czewek, zmianę kąta ustawienia odbiornika lub kąta ustawienia dodat-
kowego zwierciadła. Cecha ta jest szczególnie ważna, gdy za rozpo-
znawanym obiektem znajduje się powierzchnia silnie odbijająca świa-
tło, co mogłoby zakłócić proces rozpoznawania właściwego obiektu.
Ustawienie w takim przypadku maksymalnej odległości reagowania
czujnika mniejszej niż odległość powierzchni zakłócającej (odległość
tła), prowadzi do wyeliminowania jej oddziaływania. Rozpoznawane są
wówczas tylko obiekty znajdujące się przed określoną wcześniej odle-
głością maksymalną – tłem (background suppression).
Odbiornik (R)
Emiter (E)
okno
wykrywania
Rys. 4.34: Ograniczenie obszaru aktywnego przez doprowadzenie do przecięcia się osi
optycznych nadajnika i odbiornika
113

Komponenty mechatroniczne - Podręcznik
Minos
114
Jeszcze bardziej skuteczną jest metoda elektronicznej eliminacji wpły-
wu tła, w której czujnik widzi tło, ale potrafi je zignorować. Przykładem
takich rozwiązań może być czujnik dyfuzyjny z dwoma odbiornikami
światła lub czujnik triangulacyjny wyposażony w kamerę CCD bądź
przetwornik PSD. W pierwszym przypadku rozpoznawanie obiektu
oparte jest na porównywaniu ilości światła padającego na każdy z od-
biorników, w drugim zaś na pomiarze odległości obiektu od czujnika i
porównaniu jej z ustaloną wcześniej.
Czujniki z elektroniczną eliminacją wpływu tła mogą pracować w jed-
nym z trzech trybów (rys. 4.35):
• zabezpieczenie przed wykryciem obiektu 3 znajdującego się poza
obszarem wykrywania (background),
• zabezpieczenie przed wykryciem obiektu 2 znajdującego się przed
ustalonym obszarem wykrywania (foreground),
•
wykrywanie tylko obiektu 1 znajdującego się w zdefiniowanym ob-
szarze (funkcja okna).
Dla położenia obiektu w odległości:
• mniejszej od Lmin - eliminowany jest wpływ promieni światła wysy-
łanych sprzed obszaru wykrywania,
• większej od Lmax – eliminowany jest wpływ promieni światła wysy-
łanych zza obszaru wykrywania,
• większej od Lmin a mniejszej od Lmax - eliminowany jest zarówno
wpływ promieni światła wysyłanych sprzed jak i zza obszaru wy-
krywania.
System optyczny czujnika triangulacyjnego sprawia (rys. 4.35), że im-
puls świetlny emitowany z diody laserowej jest promieniem skupionym,
prawie równoległym. Na styku jego trajektorii z obiektem 1 jest on dy-
fuzyjnie odbijany, a część tego odbitego światła pada na PSD (Position
- Sensitive Device) lub kamerę CCD - znajdujące się w tej samej obu-
dowie. Zależnie od odległości obiektu 1 od urządzenia, światło pada w
określone miejsce PSD/CCD. Obwód analizujący porównuje sygnał
otrzymany z założoną wcześniej odległością roboczą (ustawianą za
pomocą wbudowanego potencjometru) i jeśli odległość przedmiotu
zawiera się w ustalonym obszarze to wyjście czujnika jest przełącza-
ne.
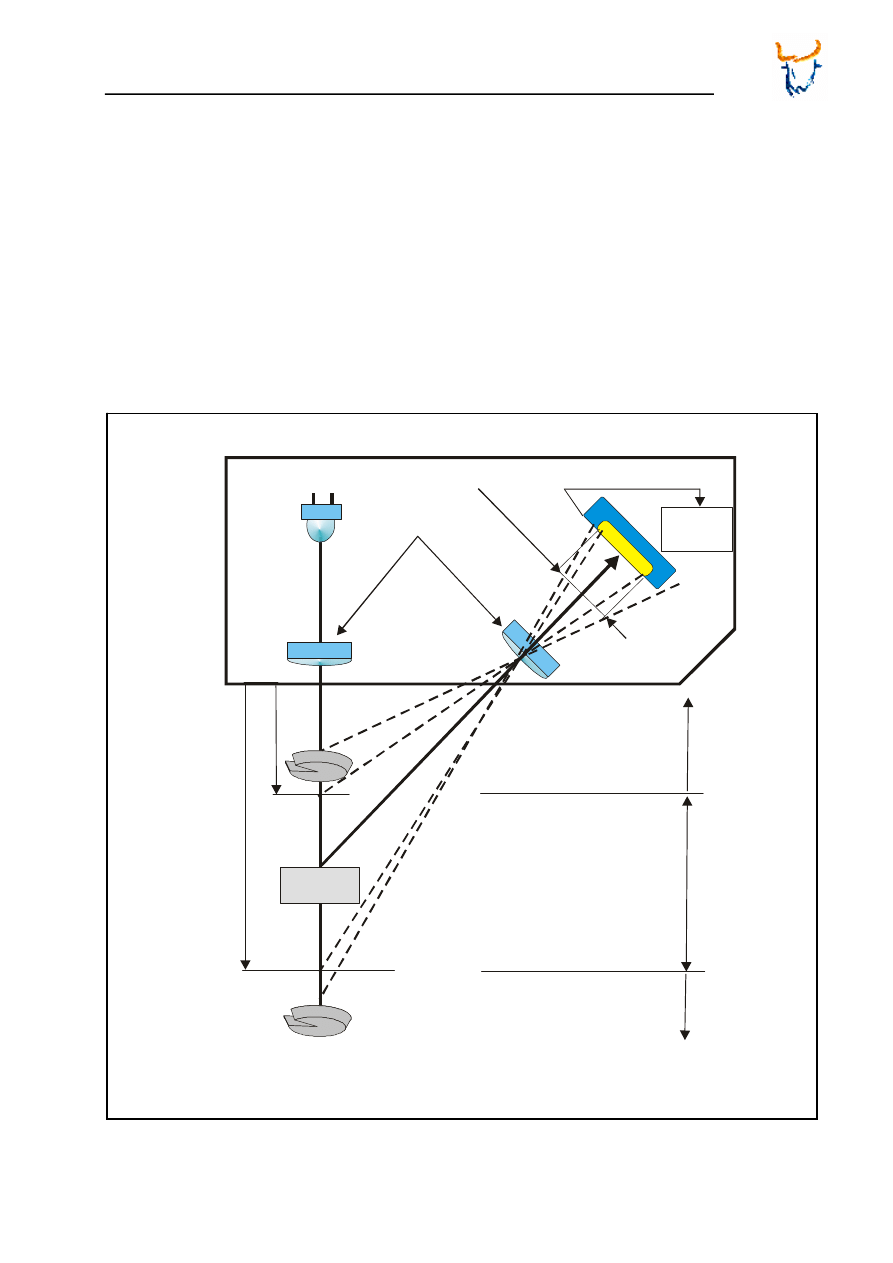
Komponenty mechatroniczne - Podręcznik
Minos
W przeciwieństwie do normalnego czujnika dyfuzyjnego, odległość ro-
bocza mało zależy od wielkości celu albo koloru, czy też własności je-
go powierzchni. Przedmiot może więc zostać łatwo wykryty, nawet
wbrew świecącemu tłu.
Czujniki te są niezastąpione przy wykrywaniu asortymentu przemiesz-
czającego się w pobliżu tła lub podłoża, którego czujnik nie powinien
wykrywać oraz przy wykrywaniu poziomu cieczy nieprzeźroczystej.
Wyjście
Odbiornik CCD lub PSD
obszar eliminacji
pierwszego planu
LD (Dioda laserowa)
Optyka
obiekt 1
za
kre
s p
om
iarow
y
L
min
L
max
obszar eliminacji
tła
obszar wykrywania
Obiekt 3
Obiekt 2
Rys. 4.35:
Czujnik triangulacyjny z elektroniczną eliminacją tła
115
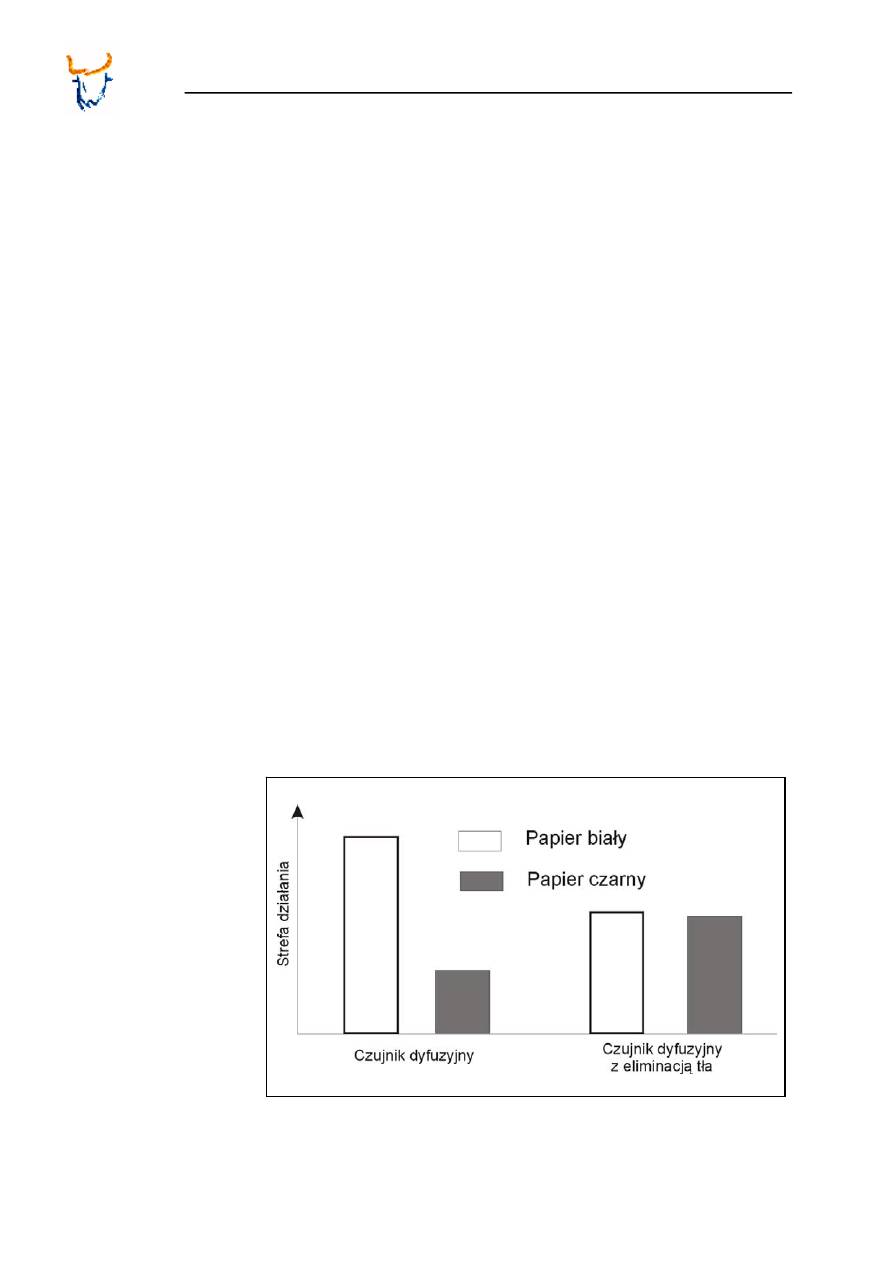
Komponenty mechatroniczne - Podręcznik
Minos
Czujniki dyfuzyjne z eliminacją wpływu tła praktycznie wykrywają jed-
nakowo obiekty jasne i ciemne. Rysunek 4.36 pokazuje różnicę w ro-
boczej strefie działania dla obiektów o zdecydowanie różnych kolo-
rach. Dla czujników odbiciowych z eliminacją wpływu tła strefa działa-
nia dla papieru czarnego skraca się nieznacznie (tylko o około 5%).
Źródła światła LED jak i odbiorniki wyposażane są w soczewki optycz-
ne pozwalające na zawężanie emitowanego strumienia światła oraz
zawężanie pola widzenia odbiornika. Dzięki temu można ograniczać
zakres reagowania czujnika, a tym samym również zmniejszać wpływ
zakłóceń od promieniowania odbitego od przedmiotów znajdujących
się poza tym obszarem. Równocześnie skupienie światła przez so-
czewki znacznie zwiększa maksymalną odległość między nadajnikiem
a odbiornikiem lub nadajnikiem a powierzchnią, od której światło jest
odbijane. W niektórych zastosowaniach korzystniejsze mogą być ele-
menty fotooptyczne bez soczewek (płaskie przeźroczyste okno), gdy
potrzebne jest szerokie pole widzenia i krótki zasięg.
Rys. 4.36:
Porównanie wpływu koloru powierzchni odbijającej świa-
tło na strefę działania czujników dyfuzyjnych
116
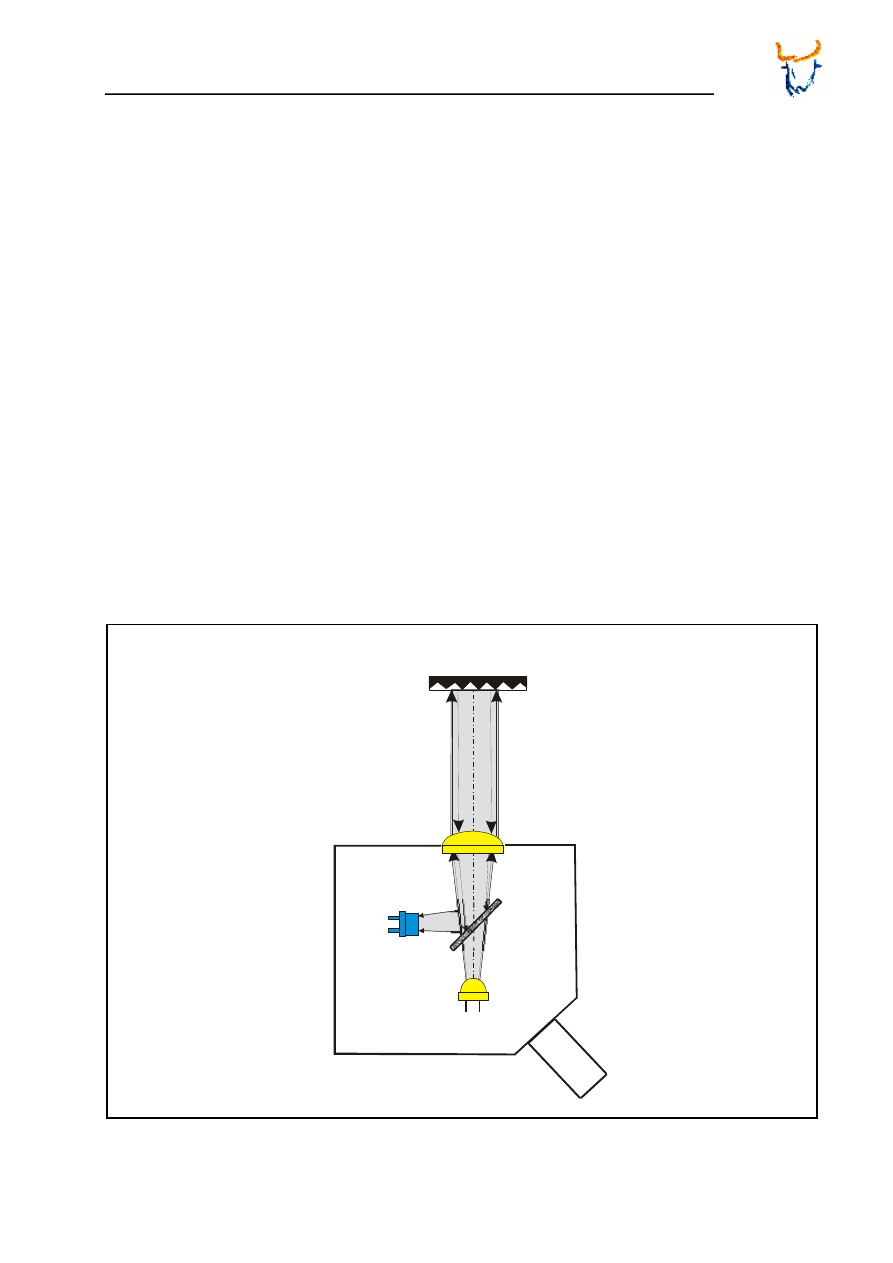
Komponenty mechatroniczne - Podręcznik
Minos
4.5.3
Czujniki refleksyjne z autokolimacją
Autokolimacja polega na samoczynnym przekształcaniu rozbieżnej
wiązki światła w wiązkę równoległą, co nawet przy małej średnicy
wiązki zapewnia wystarczającą ilość światła kierowaną na odbiornik.
Wykorzystanie zjawiska autokolimacji pozwala wykrywać przedmioty
(cele) przeźroczyste, jak i znajdujące się bardzo blisko czujnika, w tzw,
martwej strefie, występującej w czujnikach standardowych.
Czujniki fotoelektryczne refleksyjne wykorzystujące prawo autokolima-
cji bazują na tym, że osie optyczne kanałów wysyłania i odbierania
światła są identyczne. Jest to możliwe, gdyż światło w kanale odbior-
czym jest odchylane z pomocą półprzeźroczystego lustra (semi-
transparent mirror) tak, aby trafiło do odbiornika obróconego względem
emitera o 90
o
(rys. 4.37). Szczególnie dobrze współpracują one z re-
flektorami foliowymi.
Lustro
Emiter
Odbiornik
Soczewka
Reflektor z potrójnymi zwierciadłami
emitowana/odbita
wiązka
wiązka
emitowana
wiązka
odbita
Rys. 4.37.
Czujnik refleksyjny z autokolimacją
117
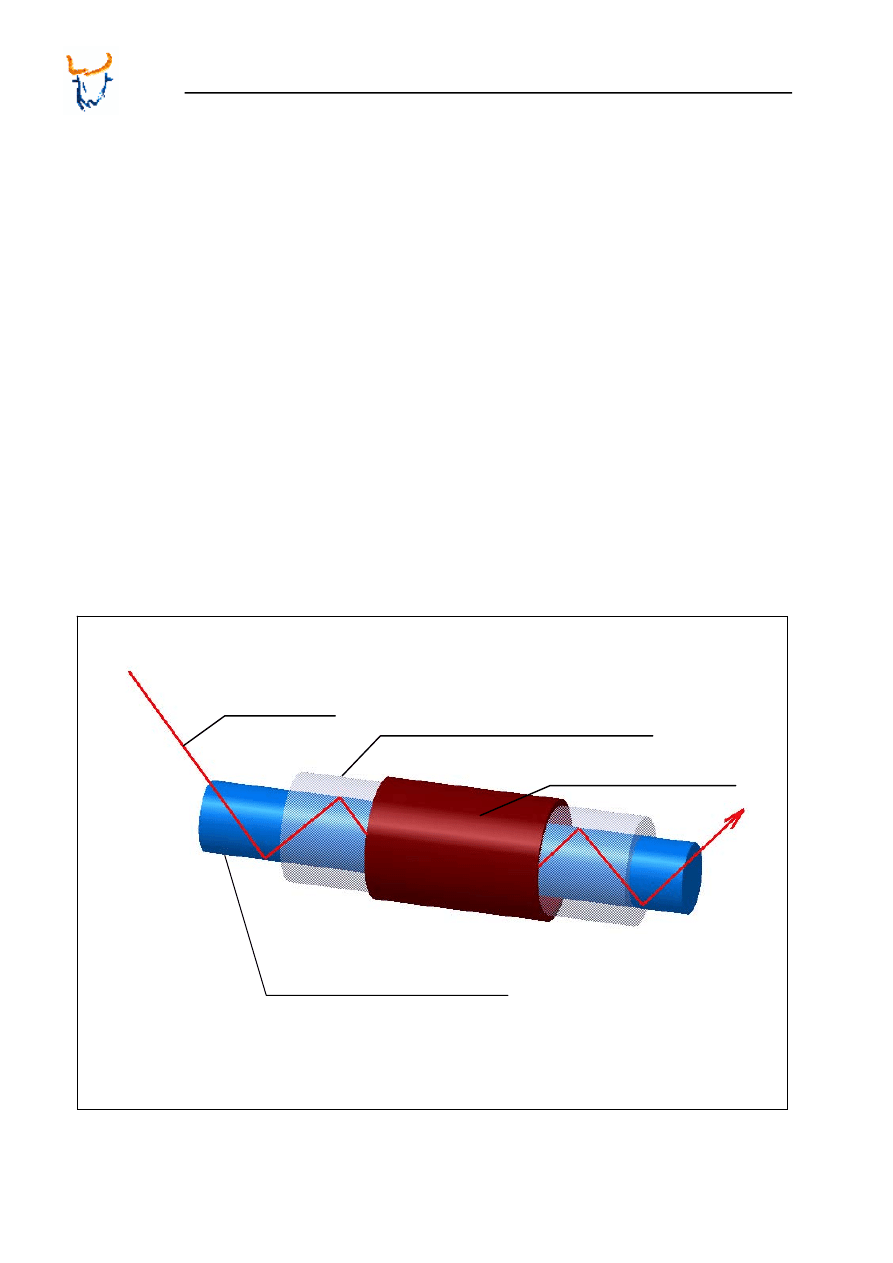
Komponenty mechatroniczne - Podręcznik
Minos
4.5.4
Czujniki ze światłowodami
4.5.4.1 Światłowody
Światłowody służą do przesyłania fal elektromagnetycznych o często-
tliwościach fal świetlnych lub zbliżonych do fal świetlnych. Najprost-
szym światłowodem jest pręt wykonany ze szkła lub tworzywa sztucz-
nego o płaskich powierzchniach końcowych, stanowiący rdzeń świa-
tłowodu. Otoczony on jest płaszczem z innego szkła lub tworzywa
sztucznego o mniejszym współczynniku załamania światła (rys. 4.38).
Istotą działania takiego światłowodu jest wykorzystanie efektu całkowi-
tego wewnętrznego odbicia, które następuje, gdy światło pada na gra-
nicę dwóch ośrodków o różnych wartościach współczynnika załamania
światła. Całkowite wewnętrzne odbicie oznacza, że 100% energii
wiązki świetlnej po odbiciu od granicy wraca do światłowodu.
n
1
> n
1
Płaszcz
współczynnik załamania
–
n
2
Rdzeń
współczynnik załamania
–
n
1
Warstwa ochronna
Promień
światła
Rys. 4.38:
Propagacja światła w rdzeniu światłowodu
118
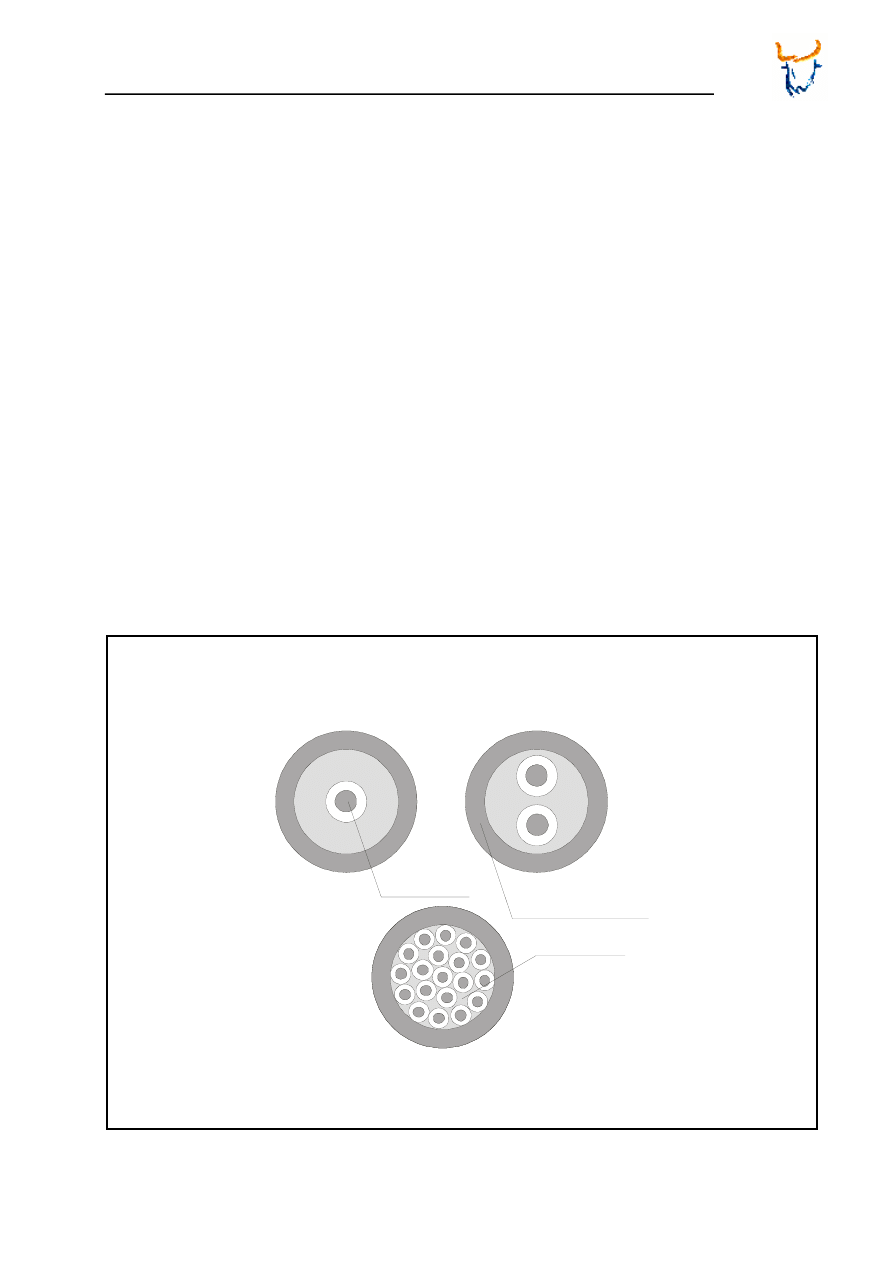
Komponenty mechatroniczne - Podręcznik
Minos
Promień światła będzie odbity tylko wtedy od warstwy granicznej, gdy
przychodzi on z ośrodka o większym współczynniku załamania światła.
Ponadto transmitowane będą tylko te promienie, które padają na po-
wierzchnię czołową włókna pod kątem mniejszym od kąta graniczne-
go, zależnego od stosunku współczynników załamania światła płasz-
cza i rdzenia.
Teoretycznie intensywność światła nie jest więc osłabiana przez te od-
bicia, jednakże zanieczyszczenia i małe wady, zarówno w materiale
rdzenia jak i w warstwie granicznej, powodują pewne straty, które sku-
tecznie ograniczają długość światłowodu, przy której światło jest jesz-
cze skutecznie przenoszone. Średnica rdzenia światłowodu, czyli tej
jego części, która transmituje światło, zawiera się w zakresie pomiędzy
5
µm dla światłowodu ze szkła kwarcowego do ok. 1 mm dla światło-
wodów z tworzyw sztucznych. Stosowanie małych przekrojów włókien,
zwłaszcza w światłowodach szklanych, czyni je bardzo elastycznymi i
można je praktycznie dowolnie wyginać.
Światłowody stosowane do transmisji światła mogą zawierać jedno,
dwa lub większą liczbę włókien (rys. 4.39).
Światłowód
Warstwa ochronna
Wypełnienie
Rys. 4.39:
Światłowody o różnej liczbie włókien
119
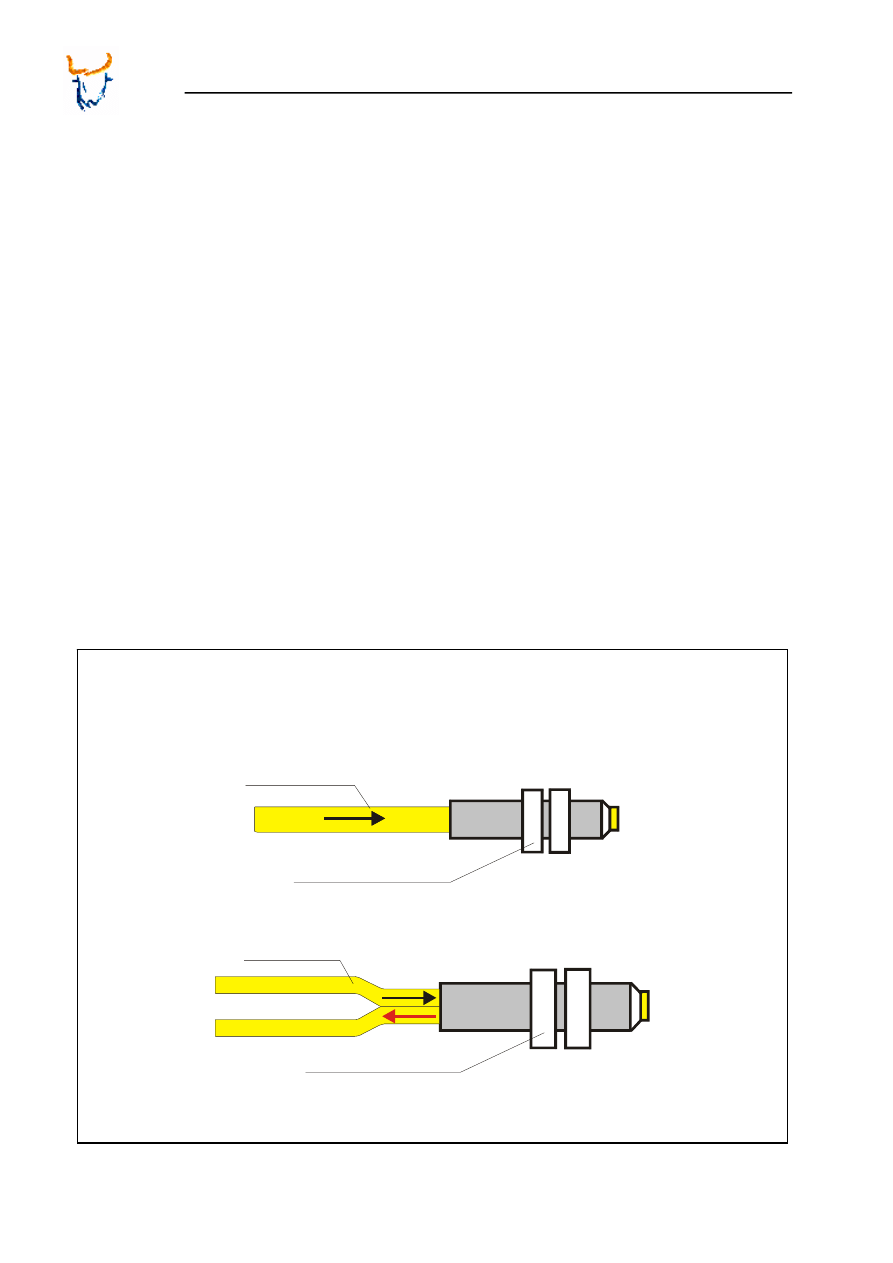
Komponenty mechatroniczne - Podręcznik
Minos
Szklane światłowody są trwalsze niż plastikowe i w wykonaniu stan-
dardowym wytrzymują temperaturę do 250
o
C, a plastikowe tylko około
70
o
C Światłowody plastikowe są natomiast bardziej wytrzymałe, tań-
sze i łatwiej jest je skracać przez obcięcie końców. Szklany światłowód
skutecznie transmituje światło widzialne jak i promienie podczerwone.
Światłowody plastikowe mają jednak małą sprawność przy transmisji
promieni podczerwonych. W konsekwencji, włókna szklane mogą być
stosowane do światła widzialnego i podczerwieni, a światłowody pla-
stikowe są odpowiednie tylko dla transmisji światła widzialnego.
Przewody światłowodowe zakończone są cylindryczną głowicą meta-
lową lub rozgałęźnikiem (bifurcated), umożliwiającym ich zamocowa-
nie. Są dwa podstawowe typy kabli światłowodowych: przelotowy i
rozwidlony (rys. 4.40).
Kable przelotowe wykonywane są ze światłowodów jednordzeniowych
(Single cored) a kable rozwidlone z dwu lub wielordzeniowych (Double
cored or Multi cored).
a)
Głowica odbiornika
Światłowód
b)
Światłowód
Głowica wykrywająca
Rys. 4.40:
Typy kabli światłowodowych a) - przelotowy, b) - rozwidlony
120
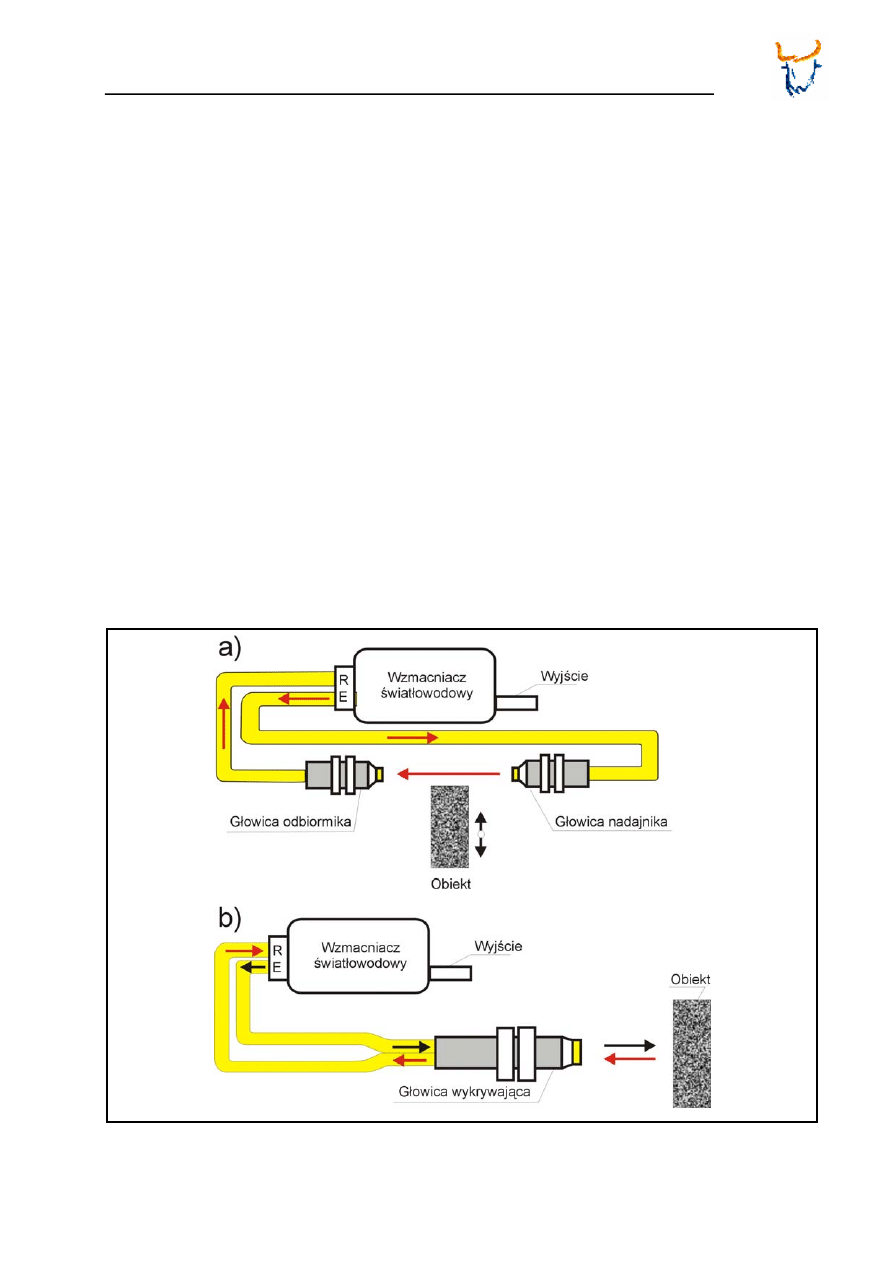
Komponenty mechatroniczne - Podręcznik
Minos
4.5.4.2. Zasada działania
Zasada działania fotoelektrycznych czujników ze światłowodami jest
taka sama jak innych czujników fotoelektrycznych. Różnica polega tyl-
ko na tym, że światło emitowane i odbierane transportowane jest przez
światłowód. Metalowe zakończenie światłowodu jest bardzo małe (rzę-
du kilku mm) i dzięki temu może być umieszczane w trudno dostęp-
nych miejscach, z dala od optoelektronicznych obwodów czujnika,
umieszczonych w osobnym wzmacniaczu (rys. 4.41).
Dwa światłowody przelotowe ustawione naprzeciw siebie realizują
funkcję czujnika przelotowego (trough beam sensor). Wiązka światła
przechodzi między dwoma kablami światłowodowymi i kiedy przerwa-
na zostanie wiązka od emitera do odbiornika - obiekty są wykrywane.
Kable typu rozwidlonego mają dwie oddzielne wiązki przyłączone do
jednej końcówki, pełniącej rolę głowicy wykrywającej (sensing head).
Jedna połówka wiązki światłowodowej służy do transmisji emitowane-
go promienia, a drugą promień wraca do odbiornika. Obiekty są wy-
krywane, gdy emitowane światło jest odbite od obiektu.
Rys. 4.41:
Typy czujników ze światłowodami a) – przelotowy b) – dyfuzyjny
121

Komponenty mechatroniczne - Podręcznik
Minos
122
Zredukowany wymiar końcówki światłowodu pozwala wykrywać bar-
dzo małe przedmioty i może być instalowany w miejscach, w których
inne sensory nie mogłyby się zmieścić. Ponadto mogą być stosowane
w miejscach o dużym ryzyku eksplozji, jak również w płynach i mają
bardzo wysoką odporność na uszkodzenia mechaniczne i wibracje.
Odporność na drgania sprawia, że mogą być też montowane na ru-
chomych mechanizmach.
Źródłem światła w czujnikach ze światłowodami może być dioda LED
czerwona lub na podczerwień, standardowa średnica zewnętrzna ka-
bla wynosi 2,2 mm, a długość kabli światłowodów nie przekracza na
ogół 2 m.
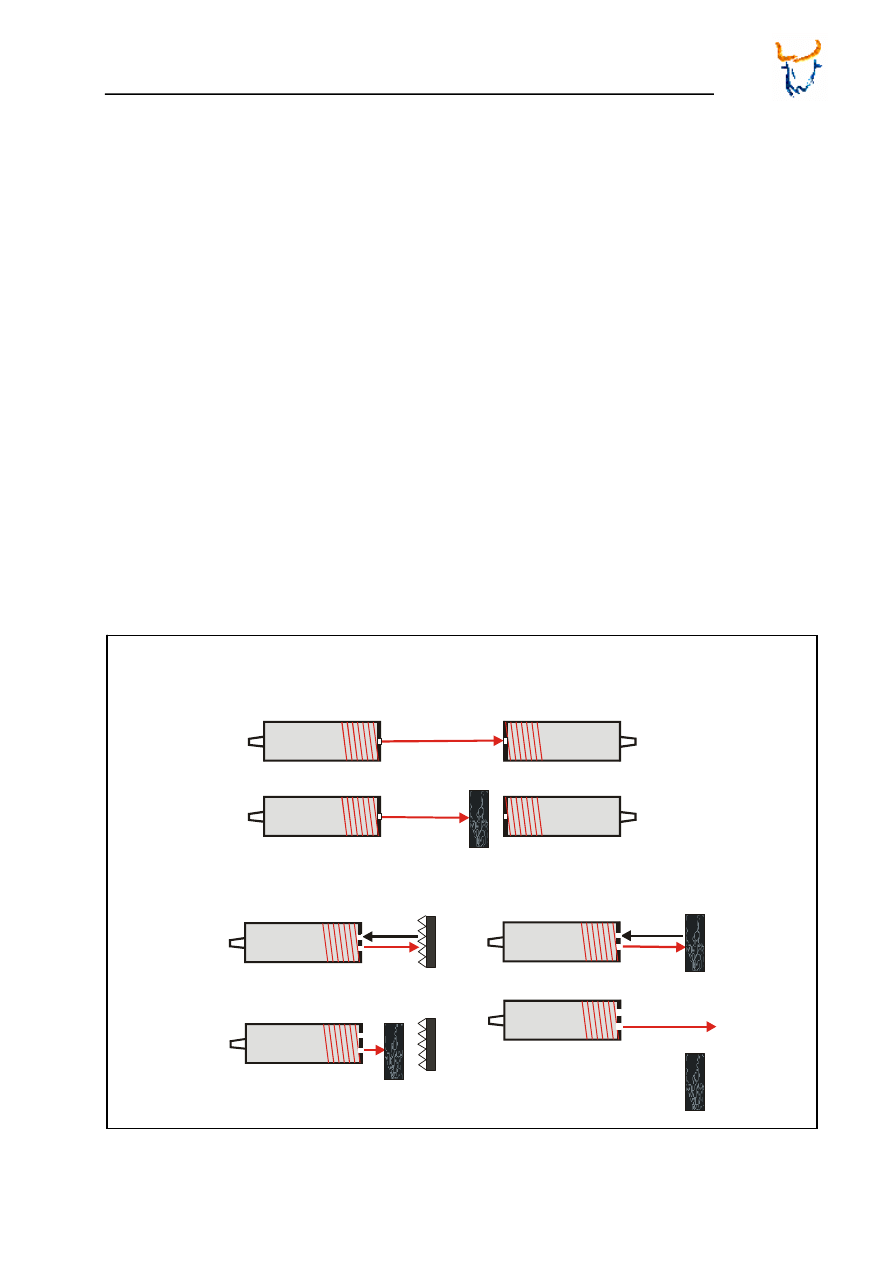
Komponenty mechatroniczne - Podręcznik
Minos
4.6
Technika połączeń
4.6.1
Typy połączeń
Czujniki fotoelektryczne mogą pracować w jednym z dwóch trybów
pracy:
o
tryb ciemny (DO) (dark operate),
o
tryb jasny (LO) (light operate).
W trybie ciemnym wyjście czujnika jest aktywne (ON), gdy światło emi-
tera nie dociera do odbiornika. Odpowiada to sytuacji „wyjście normal-
nie otwarte NO” w czujnikach indukcyjnych i pojemnościowych. W try-
bie jasnym wyjście jest aktywne, kiedy światło dociera z emitera do
odbiornika – sytuacja „wyjście normalnie zamknięte NC” w czujnikach
indukcyjnych i pojemnościowych.
Relacje między aktywnością wyjścia czujników pracujących w trybie
ciemnym a stanem oświetlenia odbiornika światła widoczne są na ry-
sunku 4.42.
Dla trybu jasnego wszystkie stany ON i OFF pokazane na rysunku
4.42 są przeciwne.
Emiter (E)
Wyjście:
OFF
a) Czujnik przelotowy
Emiter (E)
Obiekt
b) Czujnik refleksyjny
c) Czujnik dyfuzyjny
Emiter (E)
Receiver (R)
Emiter (E)
Wyjście:
ON
Tryb przełączania wyjścia: - tryb CIEMNY (DO)
Odbiornik (R)
Odbiornik (R)
Emiter (E)
Emiter (E)
Odbiornik (R)
Odbiornik (R)
Odbiornik (R)
Obiekt
Obiekt
Obiekt
Wyjście:
OFF
Wyjście:
OFF
Wyjście:
ON
Wyjście:
ON
Rys. 4.42:
Stan wyjścia czujników pracujących w trybie ciemnym
123
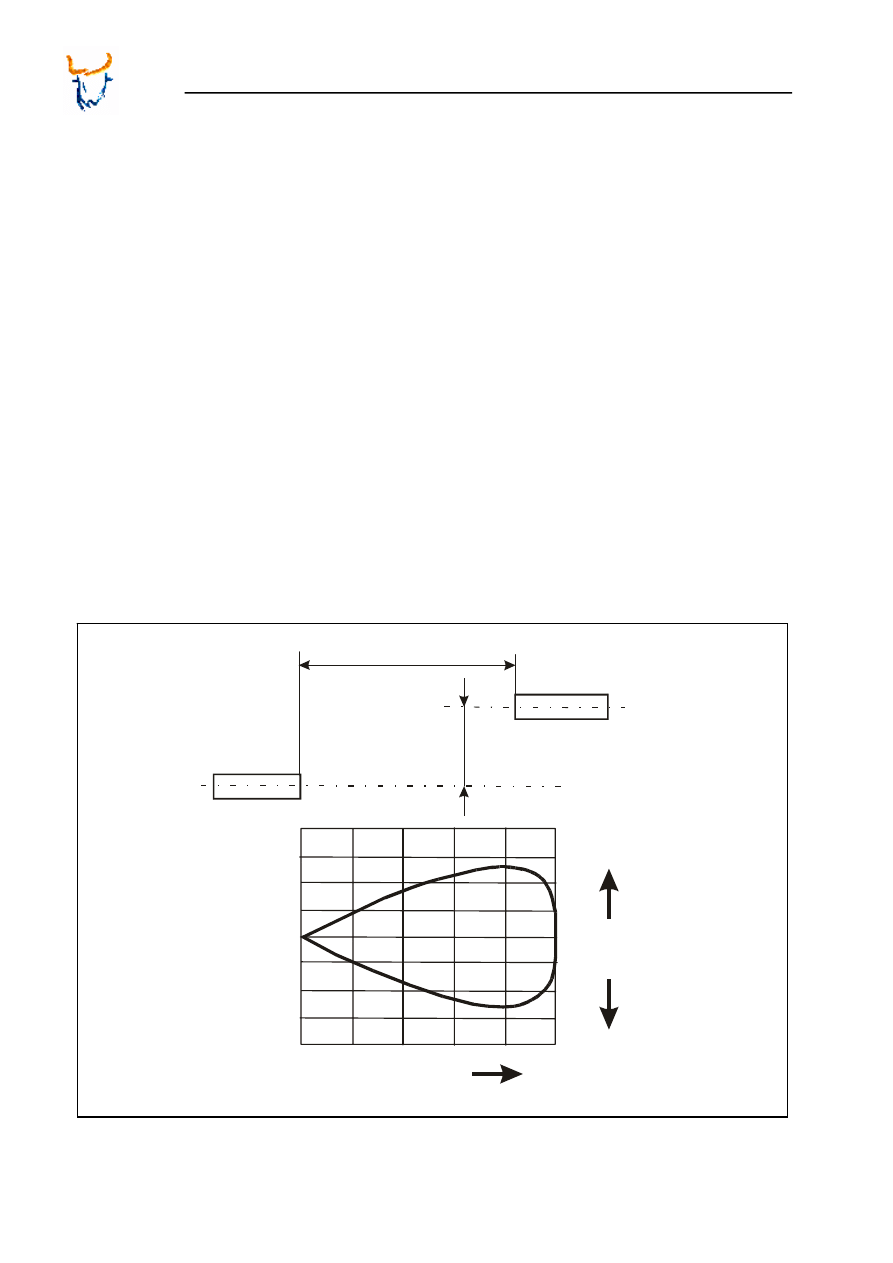
Komponenty mechatroniczne - Podręcznik
Minos
4.6.2
Przełączanie wyjścia czujnika
Każdy czujnik fotoelektryczny posiada charakterystyczną dla siebie
strefę przełączania stanu wyjścia. Wielkość oraz kształt tej strefy zale-
ży od średnicy wiązki światła wysyłanego przez emiter oraz odległości
wykrywanego obiektu od czujnika. W przypadku czujników przeloto-
wych istotna jest odległość odbiornika światła od emitera. Aby nastąpi-
ło przełączenie stanu wyjścia to wykrywany przedmiot lub emiter musi
znajdować się w strefie przełączania.
Strefę przełączania wyjścia podczas przesuwania przedmiotu wzglę-
dem czujnika lub emitera względem nadajnika można przedstawić za
pomocą tzw. wykresu odpowiedzi (rys. 4.43).
Odbiornik
Emiter
Odległość X
0
0
Emiter
Odbiornik
X
Y
+Y
-Y
Rys.4.43: Przykład wykresu odpowiedzi dla czujników przelotowych
124
Komponenty mechatroniczne - Podręcznik
Minos
Ważną cechą wszystkich czujników detekcyjnych jest maksymalna
częstotliwość przełączeń. Jest to maksymalna możliwa liczba przełą-
czeń wyjścia czujnika w ciągu jednej sekundy, wyrażana w Hz. Mak-
symalną częstotliwość przełączeń dla czujników fotoelektrycznych wy-
znacza się na podstawie czasów reakcji (Response time) i/lub czasów
wyzwalania (Release time), podawanych przez producentów dla każ-
dego typu czujnika. W obliczeniach maksymalnej częstotliwości prze-
łączeń f
max
zakłada się, że czasy te są sobie równe.
f
max
=
10
3
Czas reakcji
Czas wyzwalania
3
+
f
max
Czas wyzwalania
Czas reakcji
[ms]
-
/
[Hz]
-
125
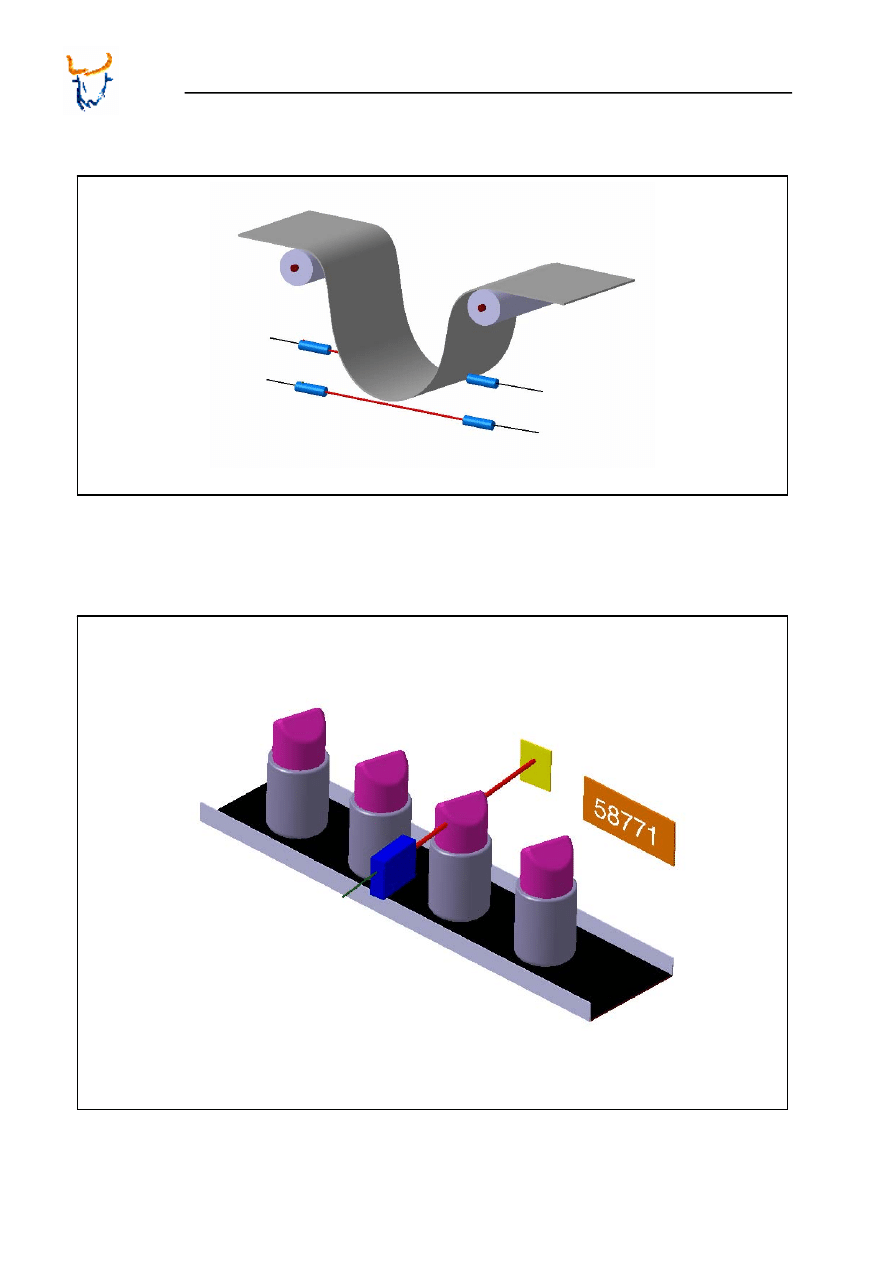
Komponenty mechatroniczne - Podręcznik
Minos
4.7 Aplikacje
Rys. 4.44:
Fotoelektryczne czujniki przelotowe do kontroli wielkości zwisu taśmy
Rys. 4.45:
Fotooptyczny czujnik refleksyjny do wykrywania niebłyszczących elementów
126
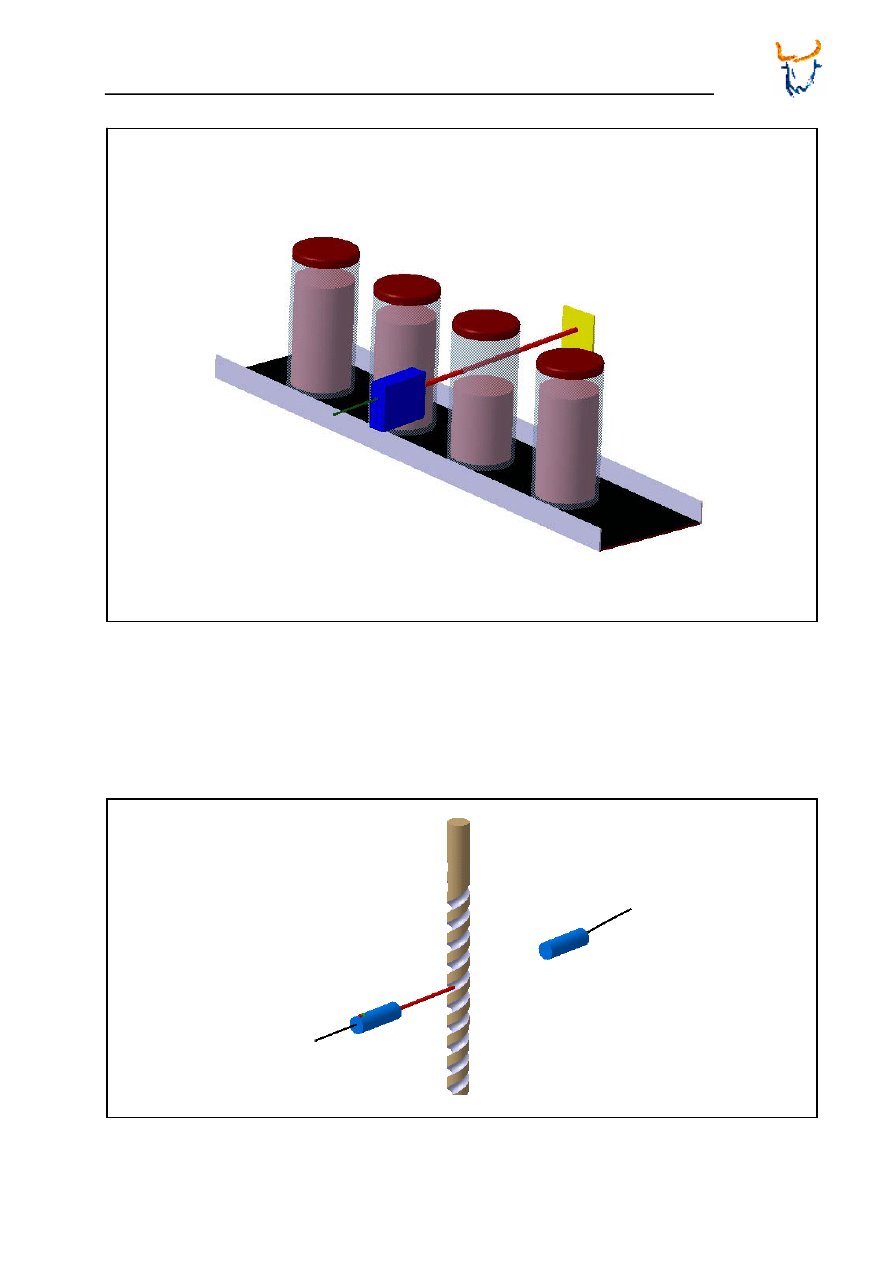
Komponenty mechatroniczne - Podręcznik
Minos
Rys. 4.46:
Fotooptyczny czujnik refleksyjny z filtrem polaryzacyjnym do wykrywania poziomu
substancji w naczyniu
Rys. 4.47:
Światłowodowy czujnik przelotowy do wykrywania złamania narzędzi
127
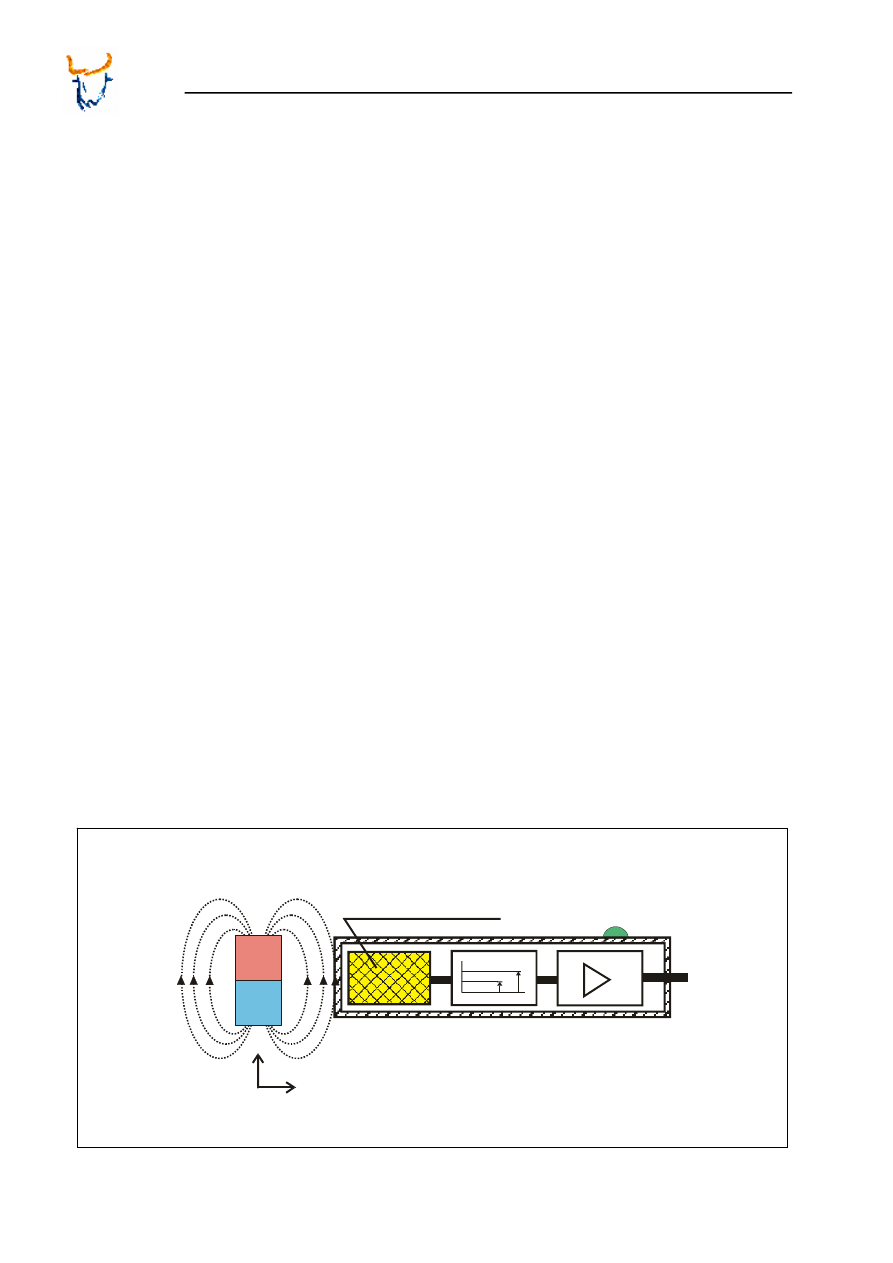
Komponenty mechatroniczne - Podręcznik
Minos
5
Czujniki magnetyczne
5.1
Informacje podstawowe
Czujniki magnetyczne mogą być stosowane do wykrywania głównie
przedmiotów, w których można zamocować magnesy. Są one typo-
wymi elementami automatyki przemysłowej, często stosowanymi z
uwagi na hermetyczną budowę, zróżnicowane kształty obudowy oraz
duże odległości działania przy niewielkich wymiarach.
Podstawowe odmiany tych czujników nie wymagają zasilania i mogą
być podłączane bezpośrednio do wejść sterowników, jak też mogą
samodzielnie sterować pracą urządzeń. Dodatkową ich zaletą jest sze-
roki zakres napięć i prądów przełączania, nawet ponad 1000V i kilku
A.
Reagują one na pole magnetyczne wytwarzane zwykle przez magnesy
stałe, połączone z wykrywanym przedmiotem. Mogą to być przedmioty
wykonane z różnorodnych materiałów, ale przedmioty nieferromagne-
tyczne są korzystniejsze gdyż zapewniają większy zakres działania
czujnika.
Elementem reagującym na pole magnetyczne może być np. herme-
tyczny łącznik elektryczny (kontaktron), element półprzewodnikowy
(hallotron), magnetorezystor lub też materiał o specjalnych własno-
ściach magnetycznych.
Pola magnetyczne przenikają przez większość materiałów niemagne-
tycznych stąd wykrywanie przedmiotów może odbywać się nawet wte-
dy, gdy między przedmiotem a czujnikiem znajdują się diamagnetycz-
ne przeszkody np. plastikowe ścianki rur lub pojemników.
Zadziałanie czujnika magnetycznego zbliżeniowego (może być sygna-
lizowane diodą świecącą) następuje pod wpływem magnesu zbliżane-
go do czujnika w kierunku X lub Y (rys. 5.1).
Element reagujący
na pole magnetyczne
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
S
N
X
Y
Magnes
128
Rys. 5.1:
Elementy zbliżeniowego czujnika magnetycznego
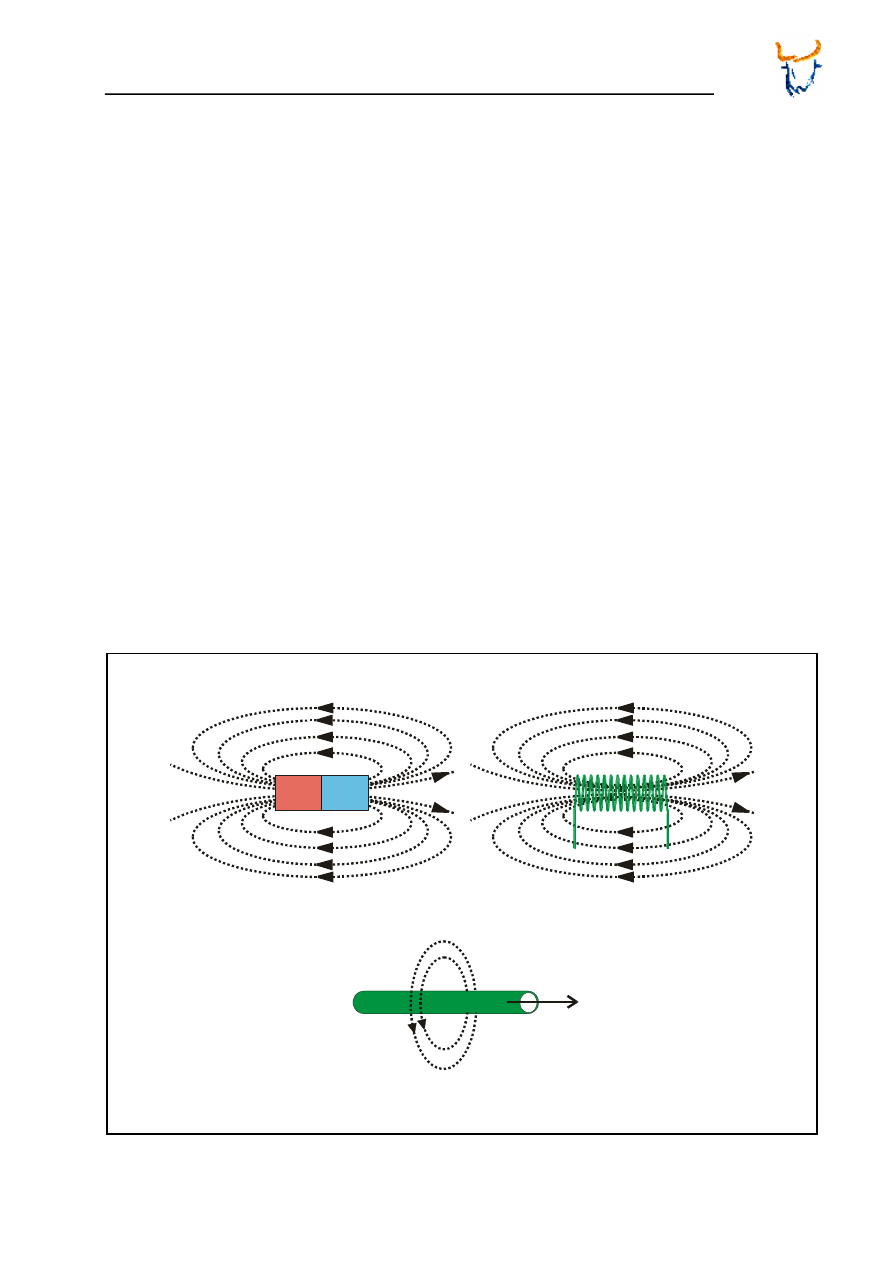
Komponenty mechatroniczne - Podręcznik
Minos
5.2 Podstawy
teoretyczne
5.2.1 Pole
magnetyczne
Pole magnetyczne jest to przestrzeń, w której działają siły magnetycz-
ne. Istnieje ono wokół magnesów, przewodników z prądem, i wokół po-
ruszającego się ładunku elektrycznego.
W magnesach wyróżnia się dwa pola, w których koncentruje się ich
magnetyzm: biegun N (ang. north) i biegun S (ang. south). Oba biegu-
ny magnesu mogą przyciągać nienamagnesowane przedmioty. Dla
dwóch magnesów biegun N będzie przyciągać biegun S, natomiast
dwa bieguny N lub dwa bieguny S będą się wzajemnie odpychały.
Linie sił pola magnetycznego są liniami zamkniętymi i biegną zawsze
od bieguna N do bieguna S. Pole magnetyczne wytworzone przez ma-
gnes jest identyczne jak pole magnetyczne wytworzone przez zwojnicę
(solenoid), przez którą przepływa prąd (rys. 5.2).
Charakterystycznymi wielkościami dla pola magnetycznego są:
- natężenie pola magnetycznego H (wyrażone w A/m),
- indukcja pola magnetycznego B (wyrażona w teslach – T)
- względna przenikalność magnetyczna
µ
r.
S
N
Przewód z prądem
Zwojnica
Magnes stały
I
I
Rys. 5.2:
Źródła pola magnetycznego
129
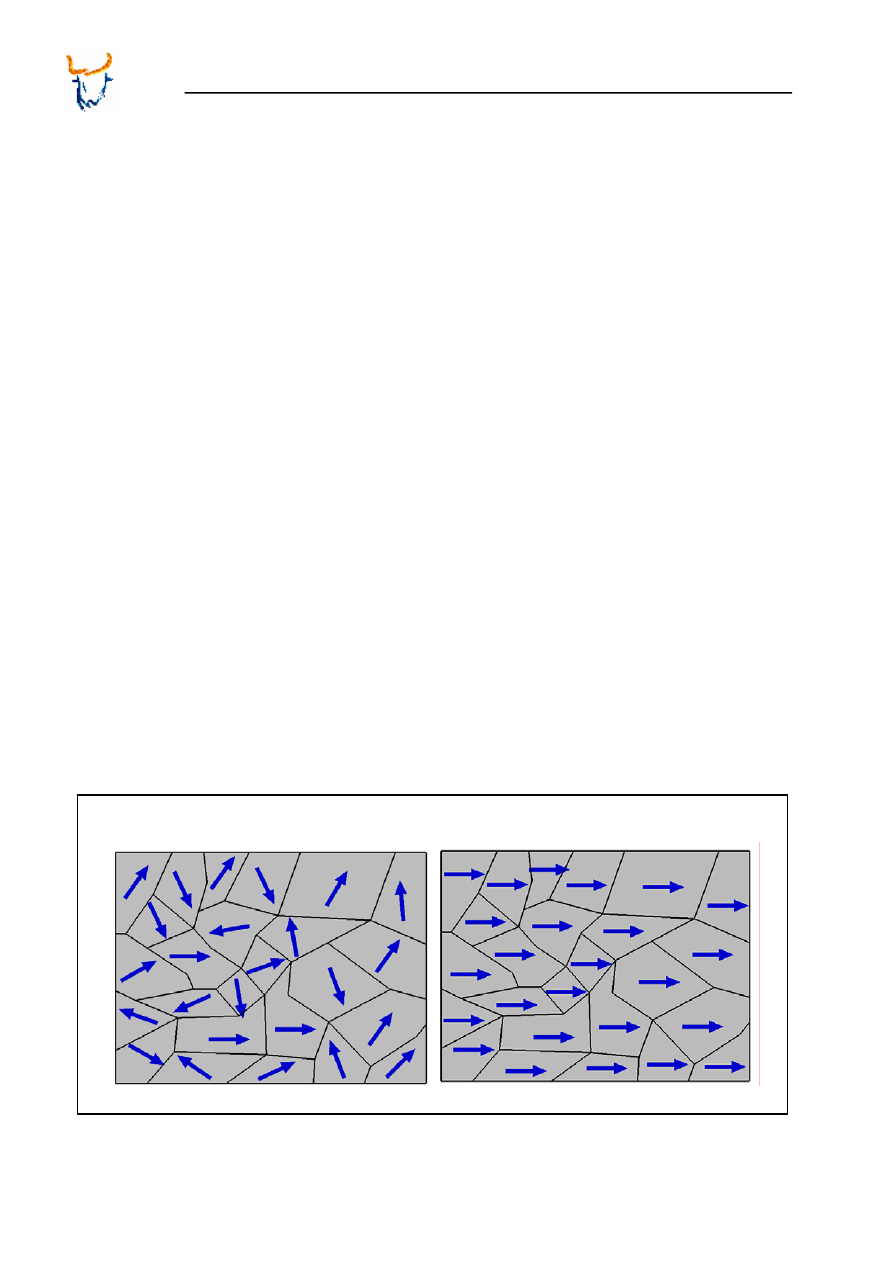
Komponenty mechatroniczne - Podręcznik
Minos
Wszystkie substancje wykazują własności magnetyczne, różnią się
jednak wartością siły oddziaływania z polem magnetycznym. Stosow-
nie do własności magnetycznych wyrażonych przez względną przeni-
kalność magnetyczną
µ
r
dzielą się na: diamagnetyki, paramagnetyki- i
ferromagnetyki. Do diamagnetyków (
µ
r
<1) nieprzyciąganych przez
magnesy należą m.in. szkło i bizmut. Paramagnetyki (
µ
r
nieco >1) to
np. aluminium, platyna, cyna. Najważniejszą grupę stanowią ferroma-
gnetyki (
µ
r
>>1), dla których przenikalność magnetyczna jest bardzo
duża. Dla czystego żelaza może ona wynosić nawet kilka tysięcy, w
zależności od natężenia pola magnetycznego.
Ferromagnetyki silnie oddziaływają z polem magnetycznym. Ich cechą
charakterystyczną są obszary jednakowego namagnesowania — do-
meny magnetyczne (rys. 5.3). Są to bardzo małe obszary w struktu-
rze materiałów. Po ich uporządkowaniu, w zewnętrznym polu magne-
tycznym, materiał uzyskuje własności magnesu. Własności ferroma-
gnetyczne stali zależą od jej składu chemicznego i sposobu obróbki
cieplnej.
a) b)
Rys. 5.3:
Orientacja domen w ferromagnetyku: a) ferromagnetyk nienamagnesowany, b)
ferromagnetyk namagnesowany zewnętrznym polem magnetycznym
130
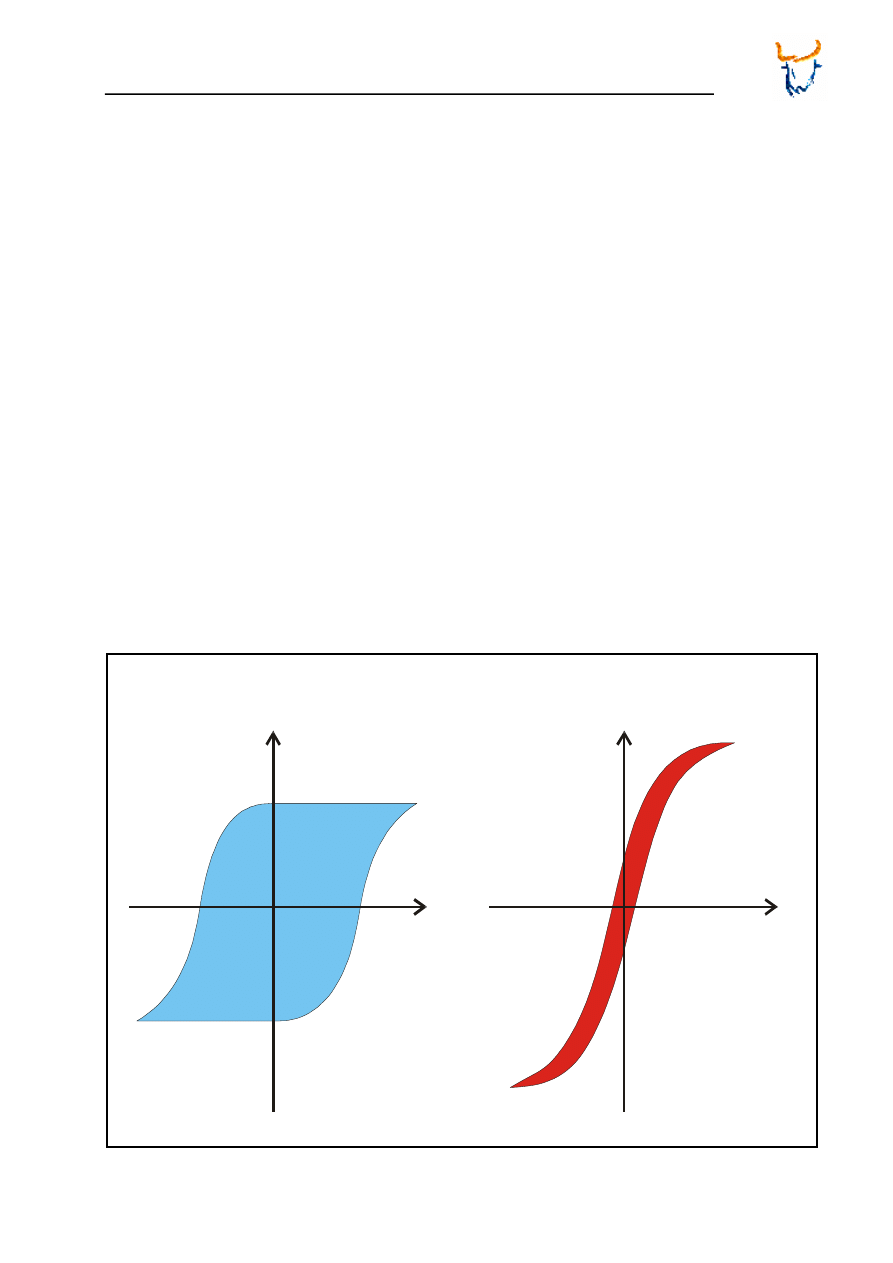
Komponenty mechatroniczne - Podręcznik
Minos
Ferromagnetyki umieszczone w zewnętrznym polu magnetycznym ule-
gają namagnesowaniu lub rozmagnesowaniu w zależności od kierunku
pola magnetycznego. Towarzyszy temu zjawisko histerezy, kształt któ-
rej zależy od własności ferromagnetyka (rys. 5.4). Szeroka histereza
oznacza, że ferromagnetyk trudno się rozmagnesowuje. Są to tzw. fer-
romagnetyki twarde i mogą być stosowane na magnesy stałe. Należą
do nich: stopy Fe-Co, Ni-Co i ferryty twarde. Ferromagnetyki miękkie
(wąska histereza) mogą być stosowane na rdzenie magnetyczne, któ-
re powinny się szybko magnesować i szybko rozmagnesowywać. Na-
leżą do nich: żelazo, stopy Fe-Si, Fe-Al, ferryty miękkie i stopy amor-
ficzne.
Omówione własności magnetyczne materiałów oraz ich zachowanie
się w zewnętrznym polu magnetycznym pozwalają na budowę różnych
odmian czujników magnetycznych.
W próżni pole magnetyczne charakteryzuje wektor indukcji magne-
tycznej B
o
. Indukcję magnetyczną B w dowolnym materiale o struktu-
rze jednorodnej wyznacza się z zależności:
B =
µ
r
•
B
o
a)
b)
Zewnętrzne
pole
magnetyczne
Wytworzone
pole
magnetyczne
Zewnętrzne
pole
magnetyczne
Wytworzone
pole
magnetyczne
131
Rys. 5.4:
Pętla histerezy magnetycznej ferromagnetyków: a) twardego, b) miękkiego
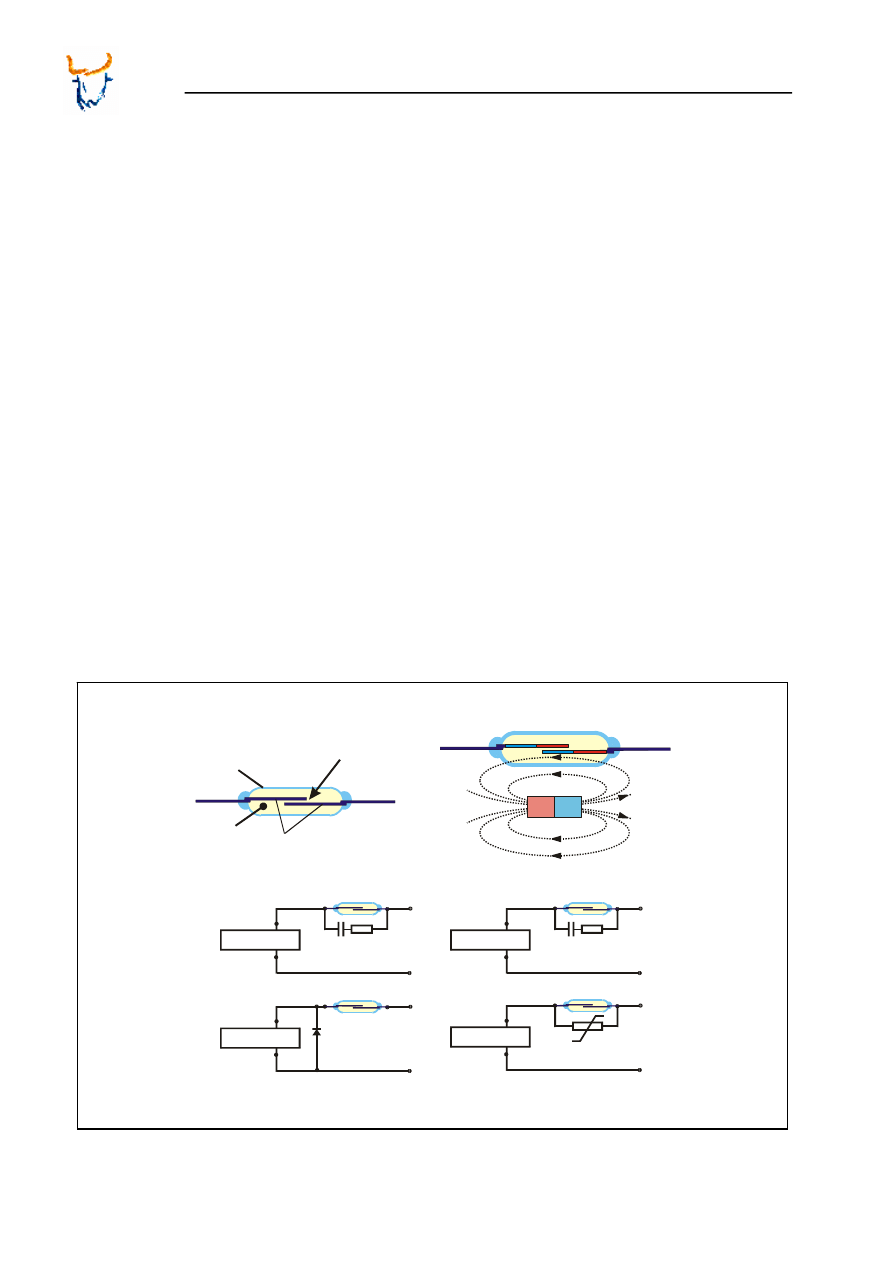
Komponenty mechatroniczne - Podręcznik
Minos
5.2.2 Kontaktron
Kontaktron składa się z hermetycznej bańki szklanej, w której w at-
mosferze gazu obojętnego lub w próżni, zatopione są dwie cienkie
blaszki z materiału ferromagnetycznego. Pod wpływem zewnętrznego
pola magnetycznego indukują się w nich własne pola magnetyczne.
Na jednej z powierzchni styku pojawi się biegun N, a na drugiej biegun
S (rys. 5.5). Jeśli siła przyciągająca bieguny pokona siłę sprężystości
blaszek to nastąpi ich zetknięcie. Po usunięciu pola magnetycznego
obie blaszki rozdzielają się na skutek ich sprężystości. Kontaktrony
mogą więc zamykać i przerywać obwód elektryczny. Aby polepszyć
pracę styków i uzyskać stabilną charakterystykę pracy, końce styków
pokrywa się – w zależności od przeznaczenia i warunków pracy – war-
stwą metalu szlachetnego takiego jak: ruten (Ruthenium), rod (Rho-
dium), złoto, itp.
Przesuwając magnes wokół kontaktronu można sterować jego stanem
tzn. zwierać lub rozwierać jego styki Za każdym razem, gdy styki kon-
taktronu rozwierają lub zwierają obwód, przez który płynie prąd, może
pojawić się przebicie elektryczne między stykami. Może to doprowa-
dzić do pogorszenia jakości kontaktronu, a nawet jego uszkodzenia.
Stosowanie dodatkowych zabezpieczeń pozwala uniknąć degradacji
powierzchni styku i zmniejszenia trwałości kontaktronu.
Maksymalna częstotliwość przełączeń kontaktronów zależy od ich kon-
strukcji i własności materiałowych. Zwykle nie przekracza ona 200 -
250 Hz. Dopuszczalny prąd płynący przez styki kontaktronów może
osiągać nawet wartości do 3A.
a)
b)
Szczelina
Gaz
obojętny
Szklana
obudowa
Zestyk
Przewód
N
S
N
S
S
N
c)
W
ODBIORNIK
R
C
ODBIORNIK
+
-
D
ODBIORNIK
+
-
~
-
R
C
ODBIORNIK
~
-
132
Rys. 5.5:
Kontaktron: a) budowa, b) kontaktron w polu magnetycznym, c) zabezpieczenia
kontaktronów (C – kondensator. R – rezystor, D – dioda, W – warystor)
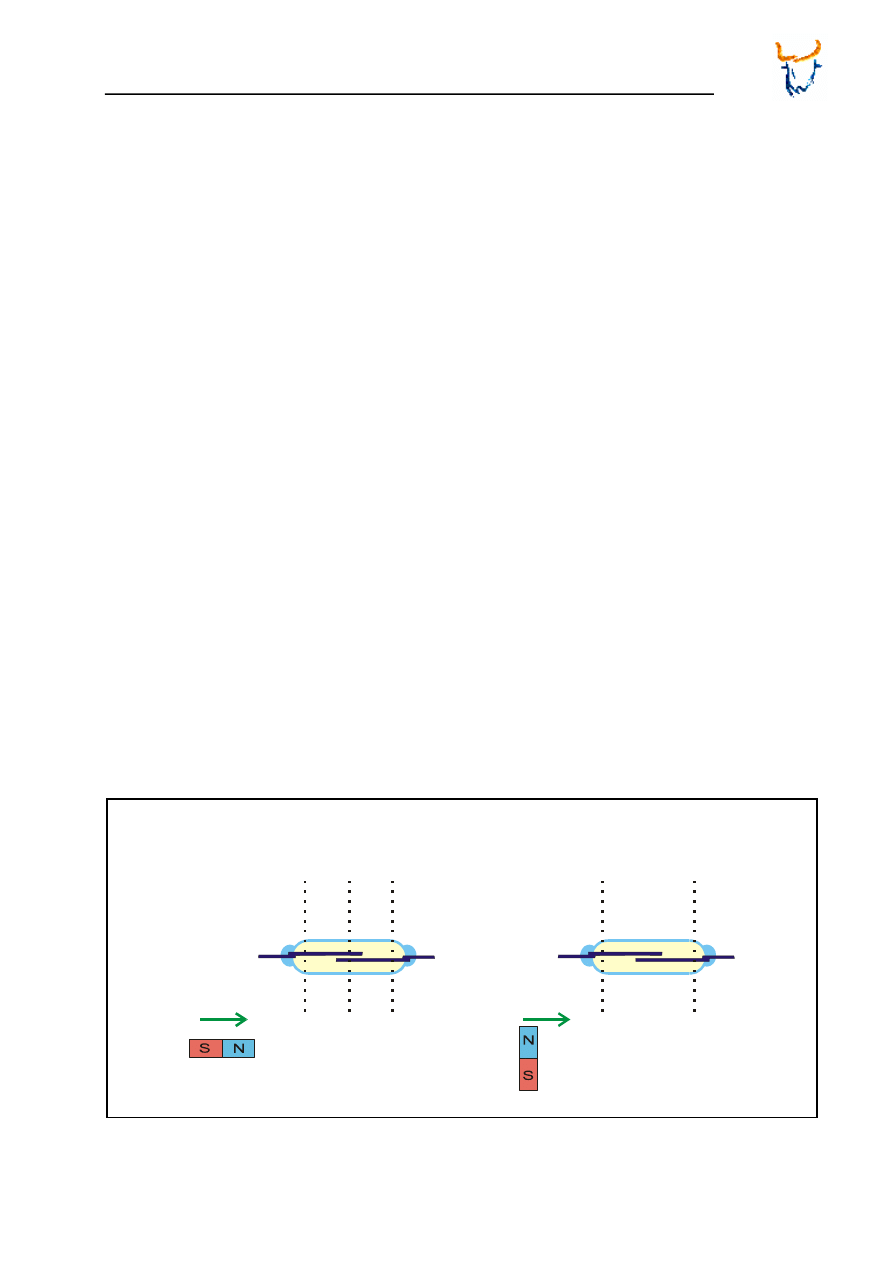
Komponenty mechatroniczne - Podręcznik
Minos
Kontaktron posiada trzy miejsca A, B, C, w których może nastąpić za-
mknięcie jego styków. Nie oznacza to jednak, że w każdym przypadku
zbliżenie magnesu do tej strefy spowoduje zamknięcie styków. Zależy
to od ustawienia osi magnetycznej magnesu względem osi kontaktro-
nu.
Równoległe ustawienie obu osi zapewnia uzyskanie trzykrotnego za-
mknięcia styków, podczas przesuwania magnesu równolegle do osi
kontaktronu (Rys.5.6). Nastąpi to w punktach A, B i C.
Tylko dwa zamknięcia wystąpią, gdy oś magnesu będzie ustawiona
prostopadle do osi kontaktronu. Są to miejsca A i C.
Ruch magnesu w kierunku prostopadłym do osi kontaktronu, tylko
wtedy spowoduje zamknięcie lub otwarcie styków, gdy położenie ma-
gnesu będzie pokrywać się z jednym z aktywnych miejsc kontaktronu,
tzn. miejscem A lub B lub C. Dla magnesu ustawionego prostopadle
do osi kontaktronu takie miejsca są oczywiście tylko dwa: A i C.
ON
ON
ON
C
B
A
ON
ON
C
A
Rys. 5.6:
Liczba zamknięć kontaktronu normalnie otwartego (OFF), podczas ruchu magne-
su wzdłuż osi kontaktronu
133
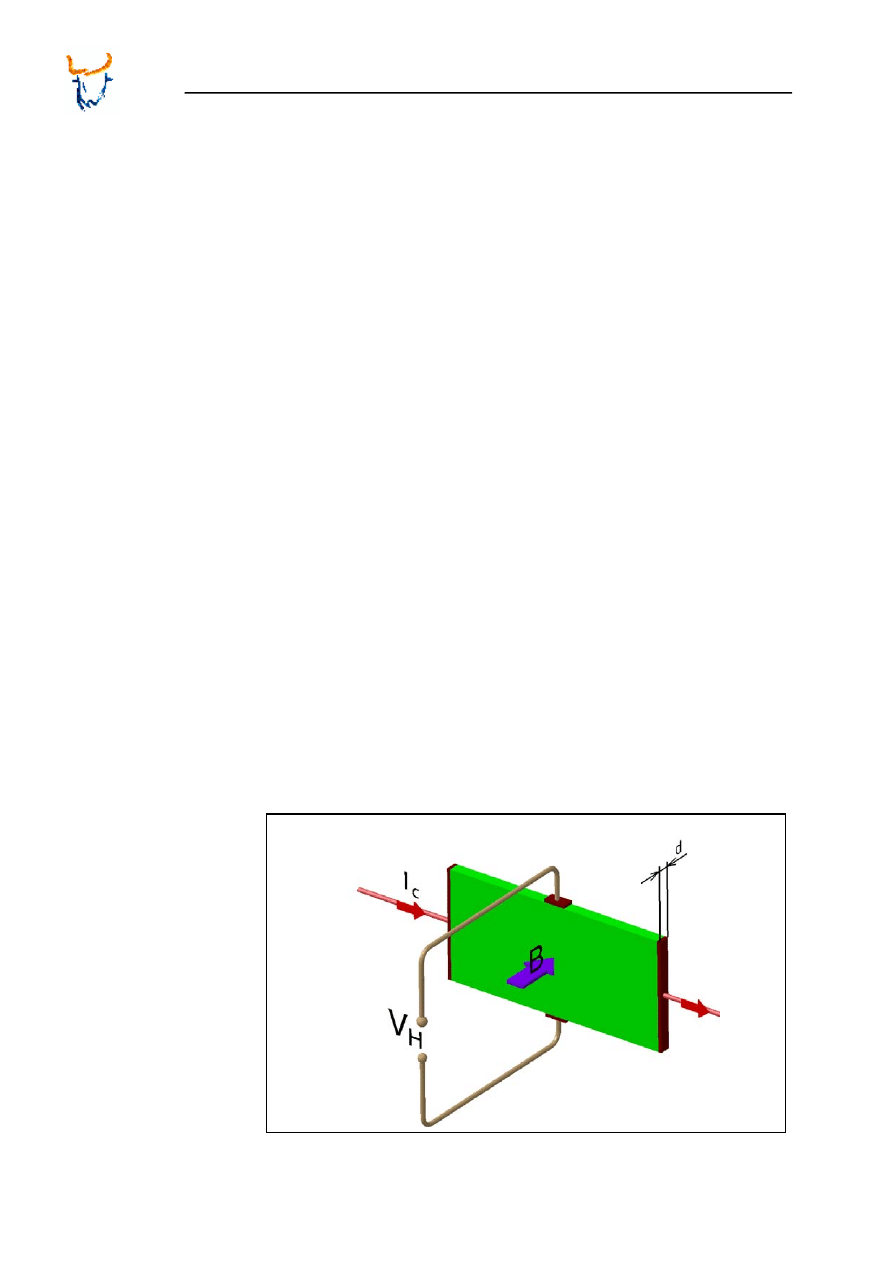
Komponenty mechatroniczne - Podręcznik
Minos
5.2.3 Efekt
Halla
Efekt Halla polega na pojawianiu się dodatkowego pola elektrycznego
w płytce z przewodnika lub półprzewodnika umieszczonej w zewnętrz-
nym polu magnetycznym, przez którą płynie prąd stały. To pole jest
wynikiem gromadzenia się ładunków elektrycznych tylko na jednym
brzegu płytki pod wpływem zewnętrznego pola magnetycznego. Po-
woduje to różnicę potencjałów na obu jej brzegach, tzw. napięcie Halla
V
H
. Wytworzone dodatkowe pole elektryczne jest prostopadłe zarówno
do kierunku pola magnetycznego B, jak i kierunku przepływu prądu Ic,
przy czym jest ono najsilniejsze, gdy zewnętrzne pole magnetyczne
jest prostopadłe do kierunku przepływu prądu (rys. 5.7).
Dla przedstawionej płytki, między mierzonym napięciem V
H
a płyną-
cym przez płytkę prądem I
C
oraz polem B, jest następujący związek:
V
H
= R
H
⋅B⋅I
c
/d
Gdzie: R
H
– stała Halla (określająca ruchliwość nośników energii), d –
grubość płytki.
Dla praktycznych zastosowań tego zjawiska niezbędne jest uzyskanie
możliwie dużej wartości napięcia V
H
. Można to osiągnąć stosując bar-
dzo cienkie płytki z materiału charakteryzującego się dużą ruchliwością
elektronów. Takie właściwości mają wyłącznie materiały półprzewodni-
kowe, wykonywane technologią cienkowarstwową, pozwalającą na
uzyskanie małej grubości płytki (rzędu 0,1mm). Są to najczęściej pół-
przewodniki typu InSb, InGaAs, Si, GaAs. Możliwość zwiększania na-
pięcia V
H
poprzez zwiększanie prądu przepływającego przez płytkę jest
znacznie ograniczona dopuszczalną mocą wydzielaną na płytce. War-
tość tej mocy zależy w dużym stopniu od konstrukcji i kształtu płytki
półprzewodnika.
Efekt Halla znalazł szerokie zastosowanie praktyczne m.in. w budowie
półprzewodnikowych czujników magnetycznych.
Rys. 5.7:
Efekt Halla
134
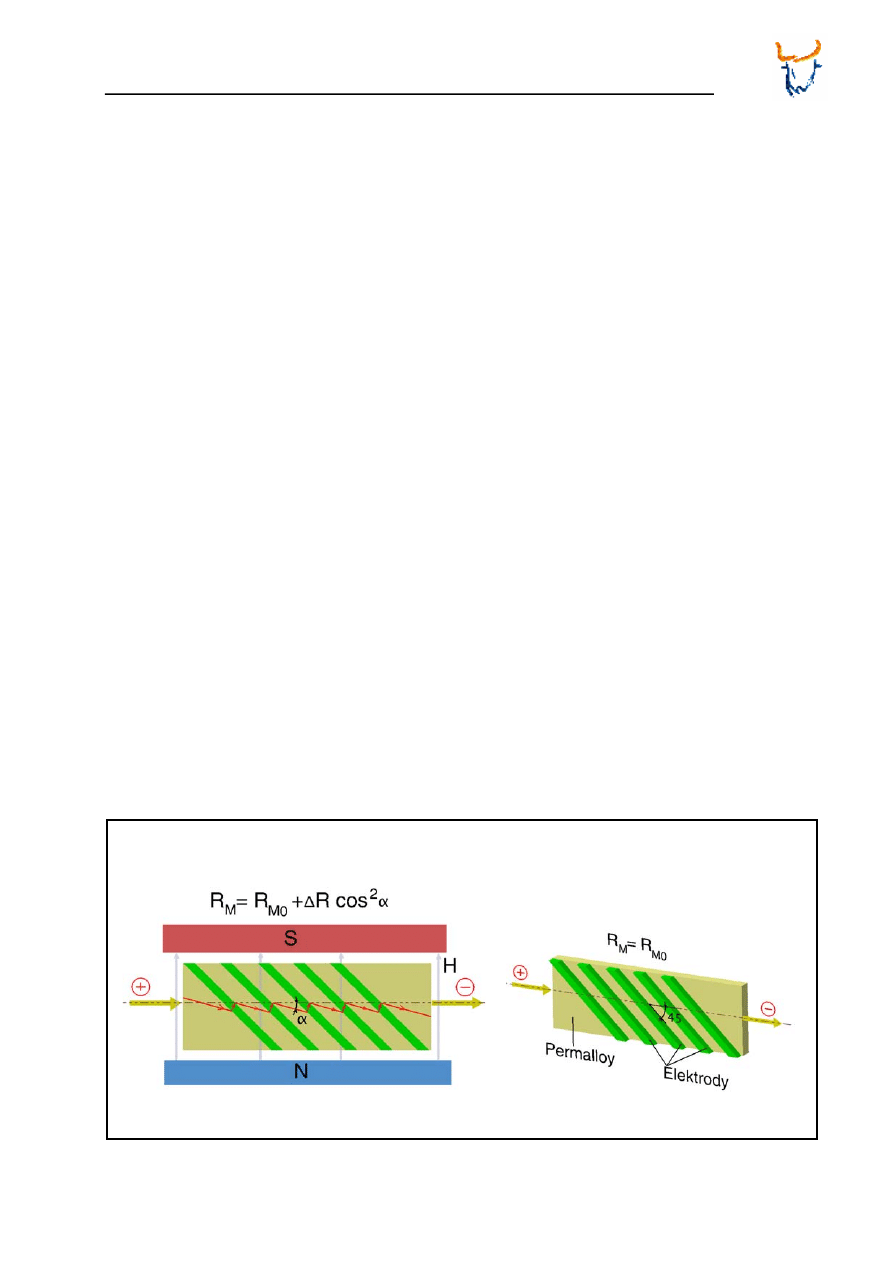
Komponenty mechatroniczne - Podręcznik
Minos
5.2.4
Efekt magnetorezystancyjny
Magnetorezystory AMR są to anizotropowe elementy półprzewodni-
kowe, charakteryzujące się silną zależnością rezystancji od natężenia
pola magnetycznego. Na czujniki stosuje się cienkie taśmy z ferroma-
gnetycznego materiału „permalloy” (20% Fe, 80% Ni).
Wzrost magnetorezystancji materiału półprzewodnikowego wynika z
oddziaływania zewnętrznego pola magnetycznego H, które powoduje
w półprzewodniku zmianę kierunku przepływu prądu I o kąt
α
(Rys.5.8). Wydłuża to drogę ładunkom elektrycznym, co jest równo-
znaczne ze wzrostem rezystancji półprzewodnika. Wartość tego kąta
rośnie wraz ze wzrostem natężenia pola magnetycznego. Zjawisko to
nazywane jest efektem magnetorezystancyjnym.
W różnym stopniu efekt ten oddziałuje na odmienne materiały, i tak w
metalach jest praktycznie niezauważalny a w półprzewodnikach jest
obecny, ale zróżnicowany.
Złote lub aluminiowe elektrody ustawione na drodze przepływu prądu
korygują jego kierunek i w rezultacie droga ładunków elektrycznych
jest jeszcze dłuższa, powodując dalszy wzrost rezystancji półprzewod-
nika do wartości R
M
zależnej od kąta
α
. Po odłączeniu pola magne-
tycznego rezystancja półprzewodnika powraca do początkowej warto-
ści R
M0
.
Związek pomiędzy kątem
α,
wynikającym z natężeniem pola magne-
tycznego H, a rezystancją półprzewodnika R
M
pozwala w czujnikach
magnetycznych na wykrywanie przedmiotów magnetycznych.
Rys. 5.8:
Efekt magnetorezystancyjny
135
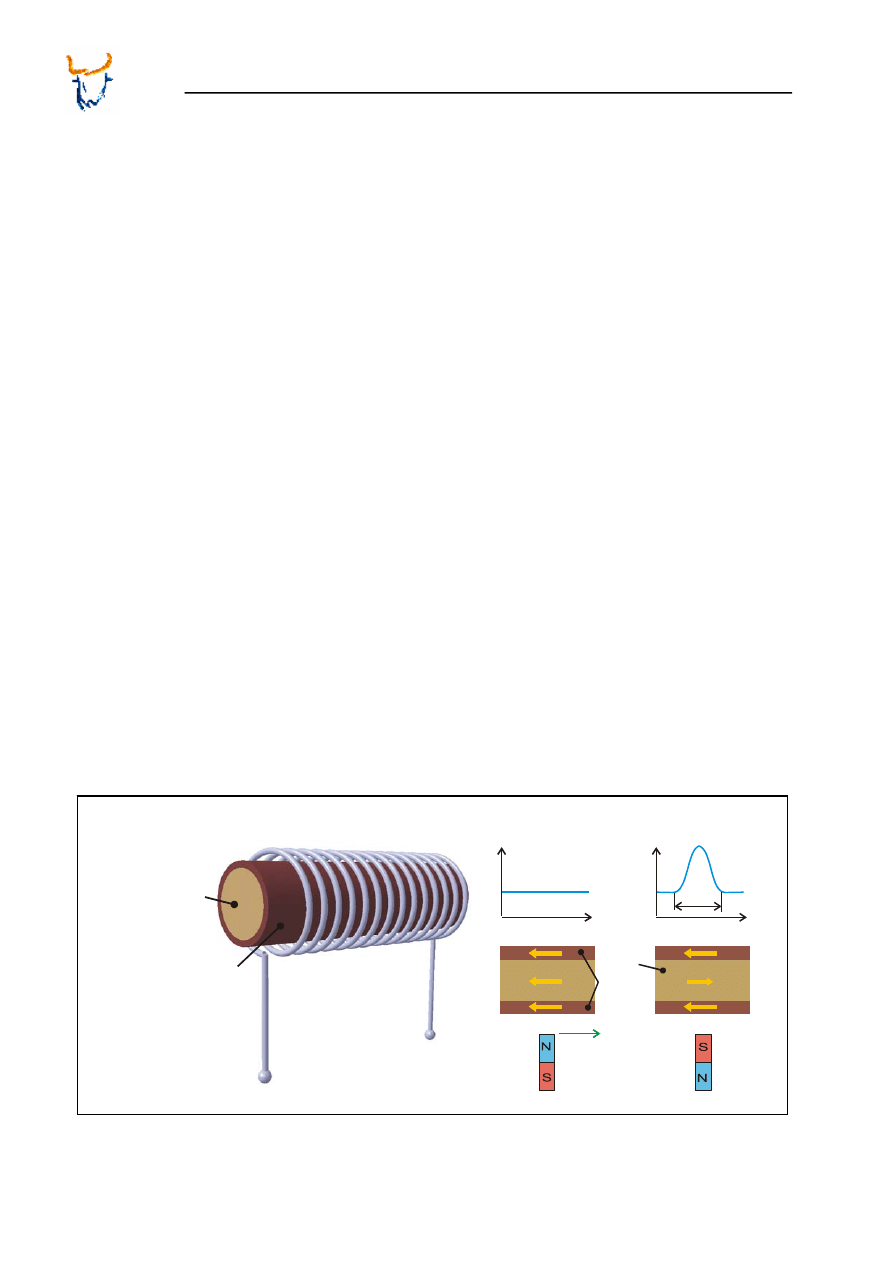
Komponenty mechatroniczne - Podręcznik
Minos
5.2.5 Efekt
Wieganda
Efekt Wieganda polega na generowaniu elektrycznego impulsu w zwo-
jach cewki nawiniętej na przewodzie ferromagnetycznym o unikalnych
właściwościach magnetycznych („przewód impulsowy”), w wyniku
zmiany kierunku zewnętrznego pola magnetycznego. „Przewody im-
pulsowe” wykonywane są o średnicy około 0,3mm z materiału ferro-
magnetycznego, który jest na zimno wielokrotnie skręcany, aby wywo-
łać w nim odpowiedni stan odkształceń.
Przewód ten, będący związkiem kobaltu, żelaza i wanadu, posiada
dwa odmienne magnetycznie obszary: rdzeń i powłokę. Rdzeń ma
własności materiału magnetycznie miękkiego (wąska histereza) a po-
włoka własności materiału magnetycznie twardego (szeroka histereza)
(rys. 5.9).
Dwie odmienne magnetycznie warstwy reagują różnie na zmianę kie-
runku zewnętrznego pola magnetycznego. Miękki magnetycznie rdzeń
zmieni szybciej kierunek swojego namagnesowania, od twardej ma-
gnetycznie powłoki, Kiedy zewnętrzne pole magnetyczne wymusi taką
właśnie zmianę w rdzeniu, przy niezmienionym jeszcze kierunku ma-
gnetyzacji powłoki, to w cewce nawiniętej na przewodzie impulsowym,
pojawi się krótkotrwały (10 - 20
µs) impuls elektryczny. Amplituda im-
pulsu napięciowego jest prawie niezależna od szybkości zmiany kie-
runku pola magnetycznego. Dla odwrócenia kierunku magnetyzacji
rdzeń wymaga przeciętnie trzy razy słabszego pola magnetycznego
niż powłoka.
To zjawisko znane jako efekt Wieganda jest wykorzystywane w czuj-
nikach magnetycznych do wykrywania obiektów w ruchu obrotowym
lub postępowym.
a)
b)
U
Powłoka
magnetycznie
twarda
Rdzeń
magnetycznie
miękki
Uzwojenia
U
czas
0
U
czas
0
20
µs
Powłoka
Rdzeń
Rys. 5.9:
Efekt Wieganda: a) ”Przewód impulsowy” z cewką, b) impuls napięciowy przed i
po zmianie kierunku zewnętrznego pola magnetycznego (biegunów magnesu)
136
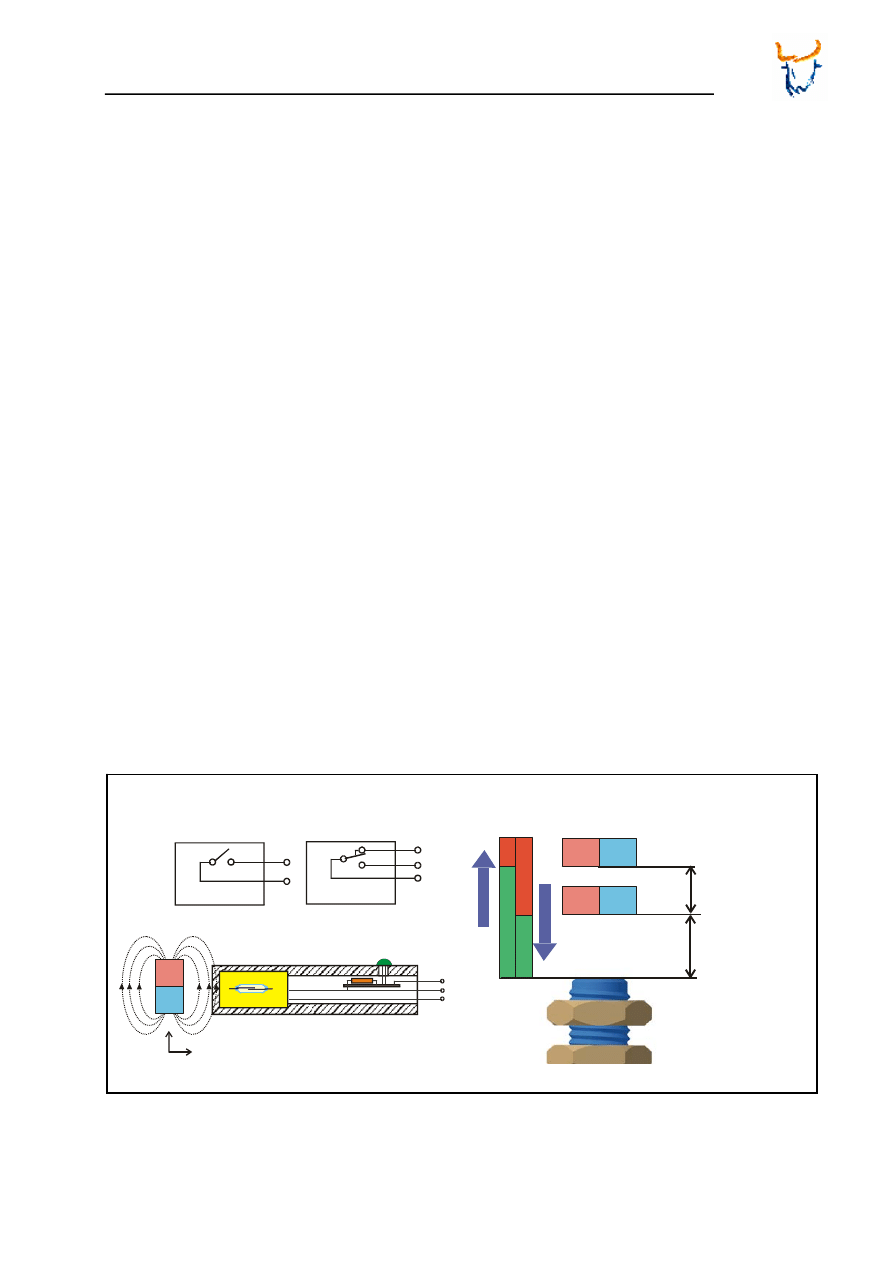
Komponenty mechatroniczne - Podręcznik
Minos
5.3
Czujniki magnetyczne z kontaktronem
Zasada działania tego czujnika opiera się na pracy kontaktronu, który
reaguje na zbliżanie się do niego magnesu. W polu magnetycznym
wytworzonym przez magnes zestyki kontaktronu zostają namagneso-
wane. Jeśli siła wzajemnego przyciągania zestyków pokona ich siły
sprężystości, kontaktron zmieni swój stan z otwartego na zamknięty.
Dzięki temu zamknięty zostanie również cały obwód elektryczny z do-
łączonym obciążeniem (rys. 5.10).
Usunięcie pola magnetycznego ze strefy działania czujnika spowoduje
zanik siły przyciągającej styki kontaktronu, co w wyniku własnej sprę-
żystości zestyków spowoduje ich rozdzielenie, przerywając tym sa-
mym obwód elektryczny z obciążeniem.
Czujniki z kontaktronem nie wymagają zasilania. Styki kontaktronu,
gdy nie znajdują się w polu magnetycznym, mogą w zależności od ty-
pu kontaktronu pozostawać w stanie otwartym (normalnie otwarte –
NO) lub w zamkniętym (NC - normalnie zamknięty).
Każdy magnes jest źródłem pola magnetycznego, którego natężenie
zależy od jego własności materiałowych i wymiarów. Decyduje ono
bezpośrednio o maksymalnym zasięgu S
max
czujnika z kontaktronem.
a) b)
WYJŚCIE
S
N
X
Y
Magnes
Kontaktron
S
N
S
N
S
max
H
ON
OF
F
ON
OF
F
NO
NO/NC
Rys.5.10:
Czujnik magnetyczny z kontaktronem: a) schemat czujnika i stanu wyjścia, b) za-
kres działania: S
max
– maksymalny zasięg czujnika, H – histereza
137
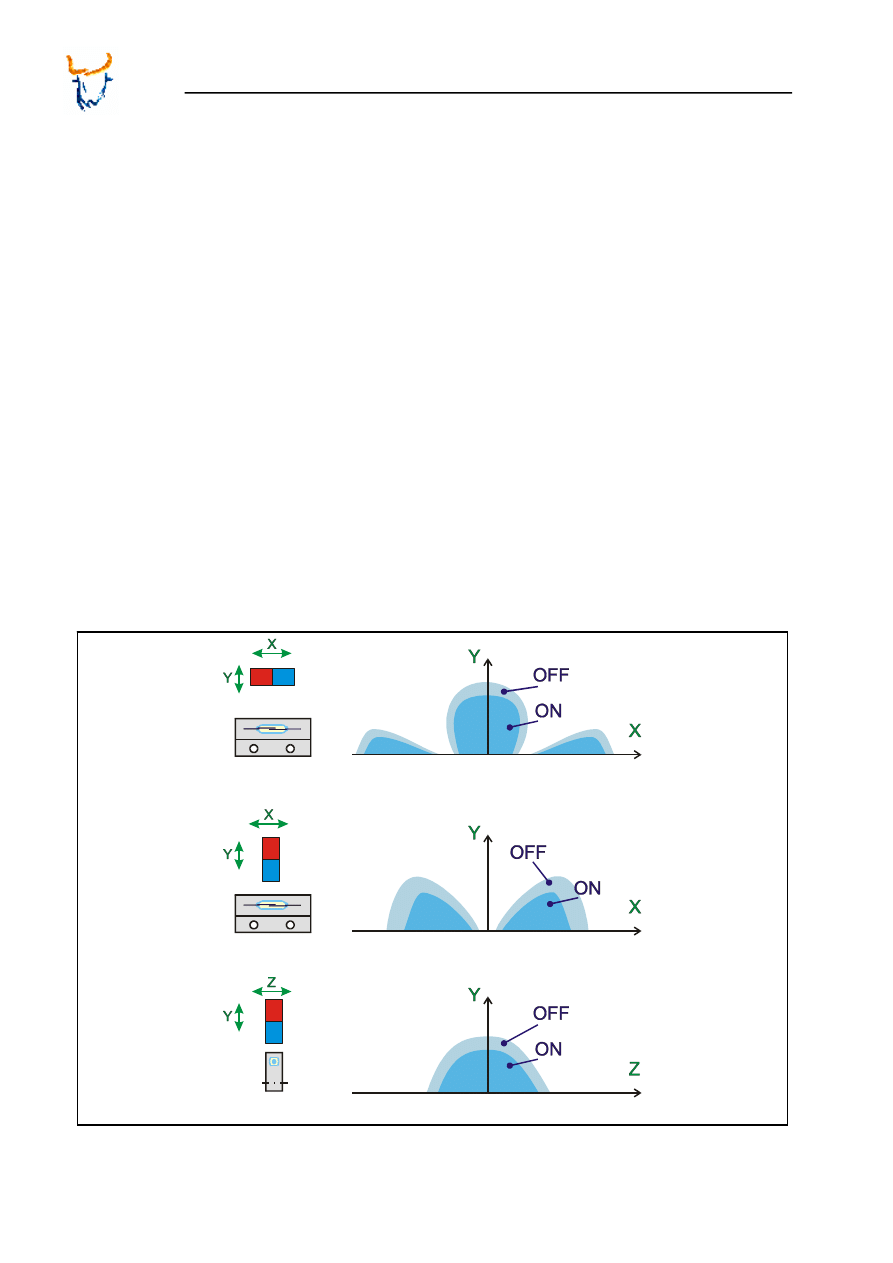
Komponenty mechatroniczne - Podręcznik
Minos
Siła oddziaływania pola magnetycznego zależy od odległości magnesu
od czoła czujnika w kierunku wzdłużnym i poprzecznym (Rys.5.11).
Zgodnie z charakterystyką działania kontaktronu, przy przemieszcza-
niu magnesu w kierunku X, zorientowanego równolegle do osi kontak-
tronu, muszą wystąpić trzy strefy, w których stan wyjścia czujnika bę-
dzie załączony (ON). Ustawiając odpowiednio magnes i czujnik wzglę-
dem siebie można uzyskać też czujnik o dwóch lub jednej strefie prze-
łączania. W każdym przypadku zbliżając lub oddalając w kierunku Y
magnes od czujnika będzie występowało tylko jedno przełączenie z
ON na OFF lub z OFF na ON.
S
N
S
N
S
N
Rys.5.11: Strefy
zadziałania magnetycznego czujnika kontaktronowego w zależności od po-
łożenia magnesu i jego orientacji
138

Komponenty mechatroniczne - Podręcznik
Minos
139
Magnetyczne czujniki kontaktronowe posiadają bardzo różne kształty
obudów, od prostych cylindrycznych i prostopadłościennych, do bar-
dzo złożonych form geometrycznych. Decyduje o tym ich przeznacze-
nie. Kształt czujnika wymusza obszary, w których może poruszać się
magnes. Są czujniki, w których możliwe jest tylko przemieszczanie
magnesu względem czoła czujnika i są takie, które umożliwiają prze-
mieszczanie magnesu również względem bocznych powierzchni czuj-
nika.
Czujniki z kontaktronem mogą być trójprzewodowe, a w przypadku
braku diody, sygnalizującej stan czujnika, maja tylko dwa przewody.
Maksymalna częstotliwość przełączeń stanu wyjścia jest niewielka
(<250Hz), a prąd jaki może przepływać przez kontaktron nie przekra-
cza 3A. Przy małych wartościach prądu czujniki te mogą skutecznie
przełączać urządzenia pracujące z napięciem, nawet powyżej 100V.
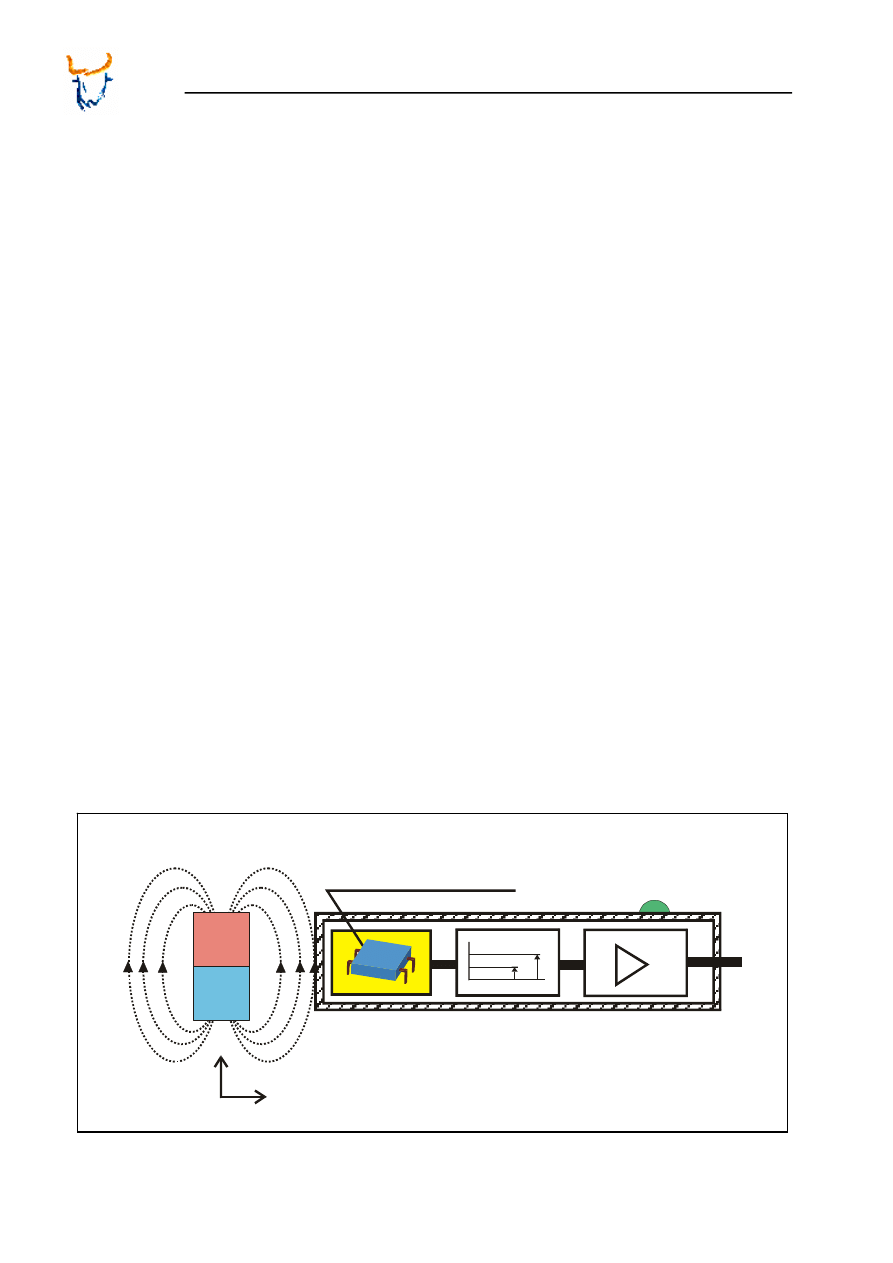
Komponenty mechatroniczne - Podręcznik
Minos
5.4
Czujniki magnetyczne z hallotronem
Czujniki magnetyczne hallotronowe wykorzystują występujący w pół-
przewodnikach efekt Halla. Stan ich wyjścia zmienia się pod wpływem
zmian zewnętrznego pola magnetycznego, powodującego pojawianie
się w czujniku dodatkowego napięcia Halla U
H
.
Czujnik jest zasilany prądem stałym, który płynie przez płytkę półprze-
wodnikową (hallotron). Dopóki magnes znajduje się poza strefą dzia-
łania czujnika prąd bez przeszkód przepływa przez hallotron. Różnica
potencjału na jego krawędziach jest wówczas równa zero (V=0). Kiedy
magnes pojawi się w strefie działania czujnika, jego pole magnetyczne
spowoduje pojawienie się na krawędziach hallotronu napięcia Halla
(V=V
H
). To napięcie stanowi sygnał pomiarowy, który steruje tranzysto-
rem wyjściowym czujnika (rys. 5.12).
Czujniki te wykonywane są zwykle jako trójprzewodowe, zasilane na-
pięciem stałym 5V do 30V. Maksymalna częstotliwość przełączania
stanu wyjścia jest dla tych czujników duża – nawet ponad 300 kHz.
Maksymalny prąd przepływający przez hallotron jest zwykle poniżej
1A.
Czujniki wykonywane mogą być w wersji omnipolarnej (reagują na do-
wolną polaryzację pola magnetycznego), unipolarnej (reagują tylko na
określoną polaryzację pola magnetycznego) oraz bipolarnej (wyłącze-
nie następuje przeciwnym biegunem pola magnetycznego niż włącze-
nie).
Półprzewodnikowy
układ Halla
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
S
N
X
Y
Magnes
Rys.5.12:
Czujnik magnetyczny z hallotronem
140
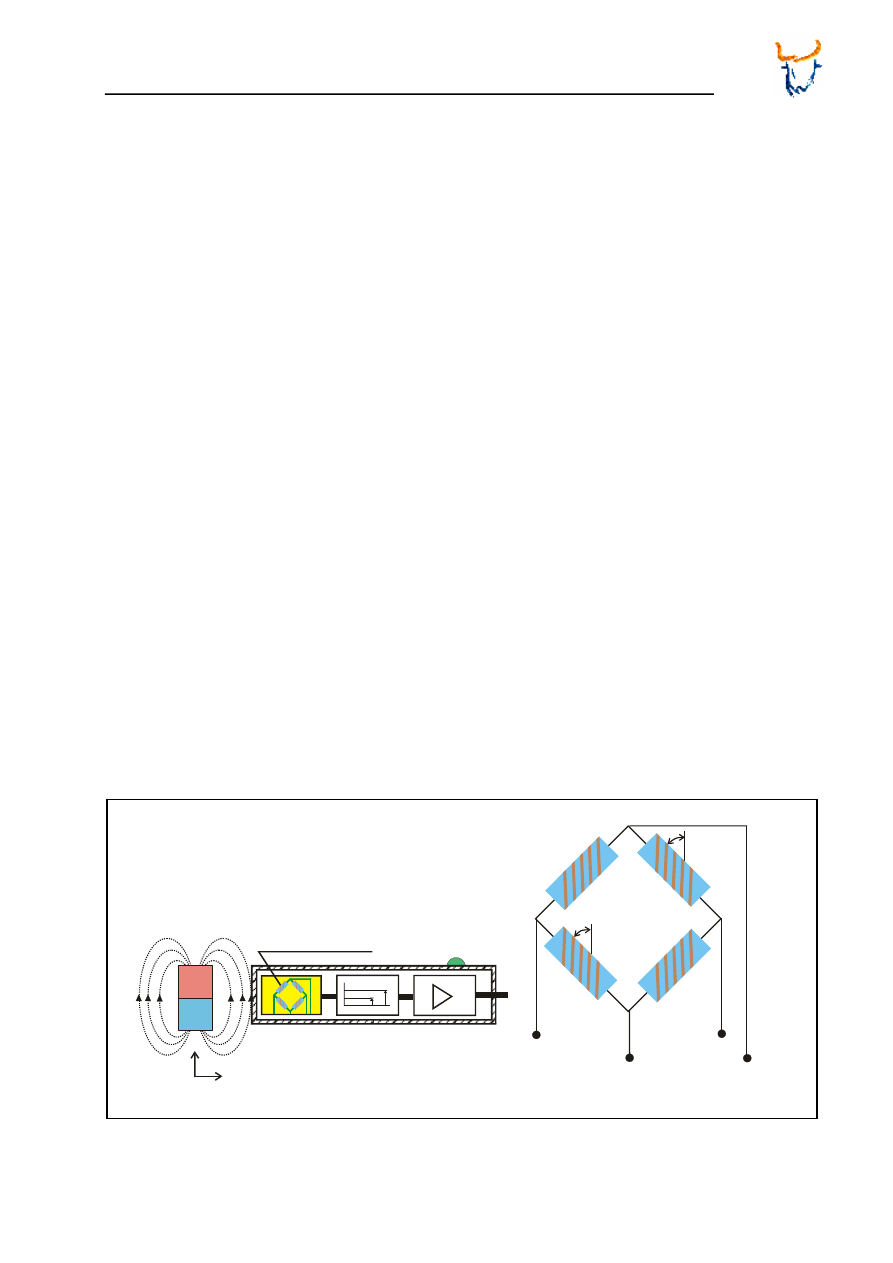
Komponenty mechatroniczne - Podręcznik
Minos
5.5
Czujniki magnetyczne specjalne
5.5.1 Czujniki
magnetorezystancyjne
Struktura czujnika magnetorezystancyjnego jest podobna do struktury
czujników hallotronowych. Różnią się one on jedynie rodzajem ele-
mentu wrażliwego na zmiany pola magnetycznego.
W czujnikach magnetorezystancyjnych tym elementem z reguły są
cztery magnetorezystory R
M
1 – R
M
4, połączone w układ mostka Whe-
atstone’a (Rys.5.13). Muszą być przy tym zachowane właściwe kie-
runki pochylenia elektrod. W tak zestawionym mostku pomiarowym
będzie realizowana kompensacja cieplnych zmian temperaturowych a
sygnał wyjściowy ulegnie podwojeniu w stosunku do pomiarów jednym
magnetorezystorem.
W wyniku zbliżania magnesu do czujnika następuje, zgodnie z efektem
magnetorezystancji, zmiana rezystancji czujnika i rozrównoważenie
mostka pomiarowego. Rozrównoważenie to jest liniową funkcją zmiany
natężenia pola magnetycznego.
a)
b)
M
ostek
Wheatstone'a
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
S
N
X
Y
Magnes
45
o
45
o
R 1
M
R 2
M
R 4
M
R 3
M
GND
Zasilanie
Sygnał
pomiarowy (+)
Sygnał
pomiarowy (-)
Rys.5.13:
Czujnik magnetorezystancyjny: a)schemat, b) mostek Wheatstone’a z magnetore-
zystorami
141
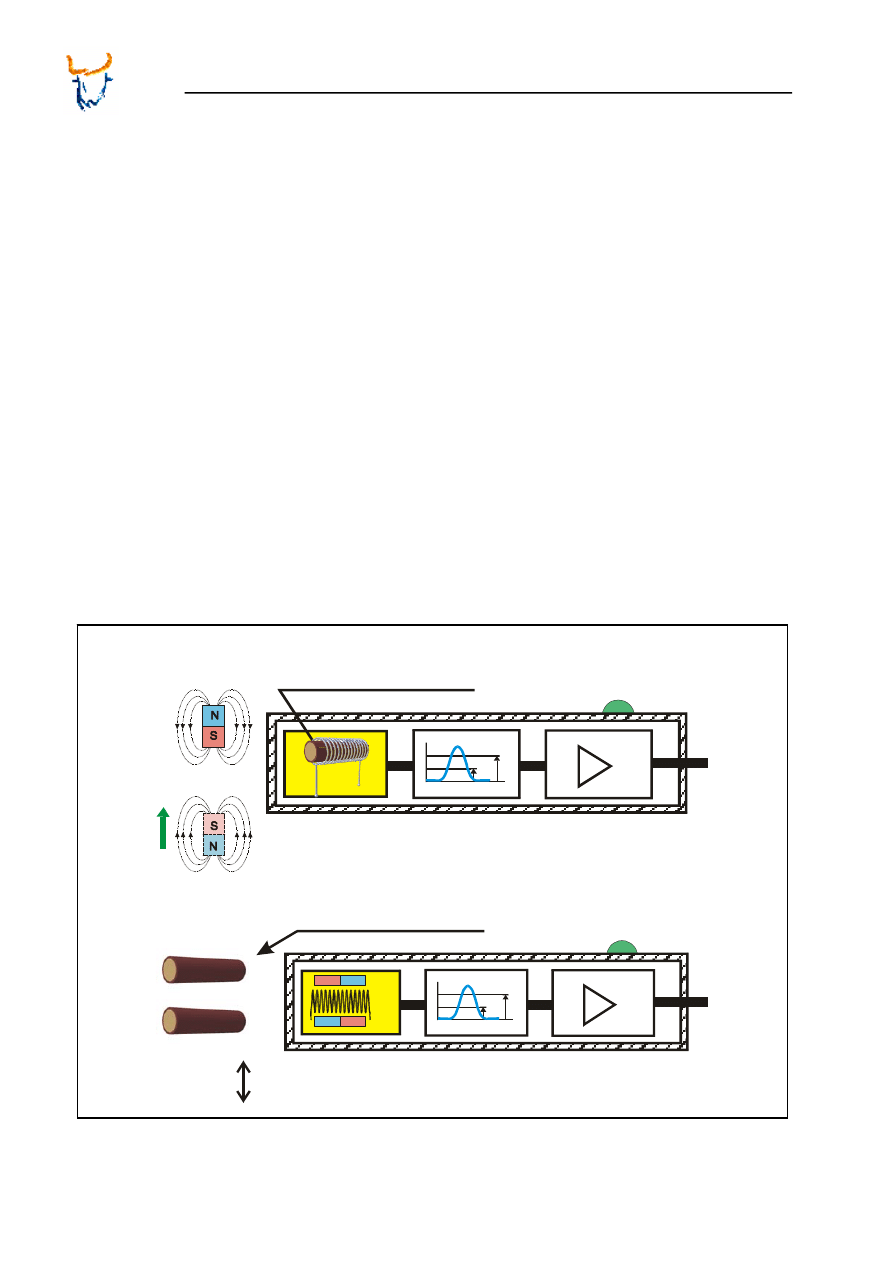
Komponenty mechatroniczne - Podręcznik
Minos
5.5.2
Czujniki magnetyczne Wieganda
Zasada pracy czujnika magnetycznego Wieganda sprowadza się do
rejestrowania przypadków zmiany kierunku namagnesowania (polary-
zacji) rdzenia „przewodu impulsowego”. Polaryzacja namagnesowania
rdzenia może zmienić się na odwrotną, jeśli zewnętrzne pole magne-
tyczne zmieni swój kierunek.
Zmieniające kierunek zewnętrzne pole magnetyczne może być wytwa-
rzane przez ruchome lub nieruchome małe magnesy (Rys.5.14). W
pierwszym przypadku na „przewód impulsowy” działa pole magnetycz-
ne magnesu o polaryzacji np. N/S, a następnie pole kolejnego magne-
su o odwróconej polaryzacji S/N. Ta zmiana polaryzacji zewnętrznego
pola magnetycznego powoduje impuls napięciowy w cewce nawiniętej
wokół przewodu impulsowego, który może być bezpośrednio lub po
przetworzeniu sygnałem wyjściowym z czujnika.
W drugim przypadku zmiana kierunku namagnesowania rdzenia uzy-
skiwana jest w wyniku przesuwania przewodu impulsowego, najpierw
przed magnesem o polaryzacji np. N/S, a po chwili przed drugim ma-
gnesem o odwrotnej polaryzacji S/N. W tej koncepcji magnesy oraz
cewka umieszczone są w czujniku, a elementem poruszającym się
względem czujnika jest przewód impulsowy.
a)
Układ
Wieganda
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
b)
Przewody impulsowe
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
Y
S
S
N
N
Rys. 5.14:
Tryby pracy czujnika magnetycznego Wieganda a) ruchome pole magnetyczne, b)
ruchomy „przewód impulsowy”
142

Komponenty mechatroniczne - Podręcznik
Minos
143
Oprócz omówionych trybów pracy możliwe jest jeszcze rozwiązanie ze
stacjonarnymi magnesami umieszczonymi w głowicy czujnika wraz z
cewką nawiniętą na przewodzie impulsowym. W tym przypadku zmia-
nę kierunku pola magnetycznego może wywoływać ferromagnetyk po-
ruszający się przed czołem czujnika. Rozwiązanie to może posłużyć
do zliczania przedmiotów ferromagnetycznych przesuwających się
przed czujnikiem. Można to wykorzystać np. do pomiaru prędkości ob-
rotowej koła zębatego, rejestrując liczbę zębów przesuwających się
przed czujnikiem. W takim przypadku odwrócenie strumienia magne-
tycznego w przewodzie impulsowym zdarza się dwa razy częściej niż
częstotliwość przechodzenia zębów koła zębatego nad biegunami ma-
gnetycznymi czujnika. Każdemu odwróceniu strumienia towarzyszy
duży impuls napięcia w cewce.
Czujniki Wieganda nie wymagają zasilania, mogą być wykonywane ja-
ko proste czujniki dwuprzewodowe i są odpowiednie do pracy w trud-
nych warunkach środowiskowych. Charakteryzuje je wysoka częstotli-
wość generowanych impulsów (nawet do 20 kHz) oraz wysoki i powta-
rzalny impuls napięcia wyjściowego (kilka woltów).
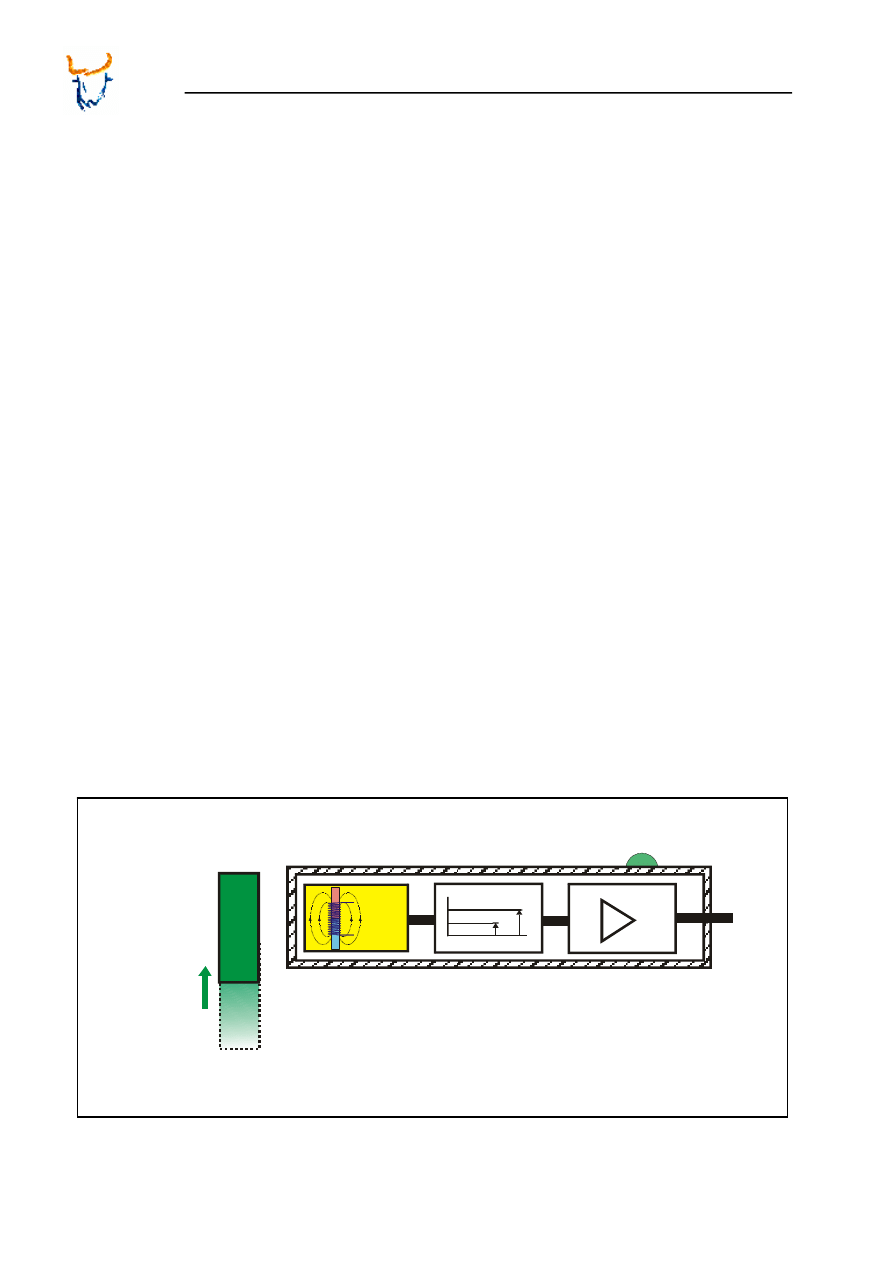
Komponenty mechatroniczne - Podręcznik
Minos
5.5.3
Czujniki magnetyczne z magnesem
Najprostsze magnetyczne czujniki składają się z magnesu stałego i
nawiniętej dookoła niego cewki (Rys.5.15). Ferromagnetyczny przed-
miot zbliżający się do czujnika zmienia strumień magnetyczny prze-
chodzący przez cewkę, generując równocześnie napięcie na końcach
cewki. Tego typu czujniki magnetyczne wykrywają ruch przedmiotu fer-
romagnetycznego.
Nie mogą one jednak być stosowane do wykrywania nieruchomych
przedmiotów, ponieważ napięcie wyjściowe zależy od tego jak szybko
wykrywany przedmiot zbliża się do czujnika. Wartości tych napięć są
jednak małe i wymagają dodatkowego wzmocnienia, aby przełączyć
stan układu wyjściowego. Gdy prędkość przedmiotu zmniejsza się, to
napięcie wyjściowe też spada. Dla nieruchomego przedmiotu spada
ono do zera.
Czujniki te nie wymagają zasilania oraz cechują się wysoką rozdziel-
czością, znacznie wyższą niż przy wykorzystaniu efektu Halla. Roz-
dzielczość tą osiąga nawet setne części stopnia przy pomiarze pręd-
kości obrotowej.
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
Ferromgnetyk
N
S
Rys.5.15:
Czujnik magnetyczny do wykrywania przedmiotów ferromagnetycznych w ruchu
144
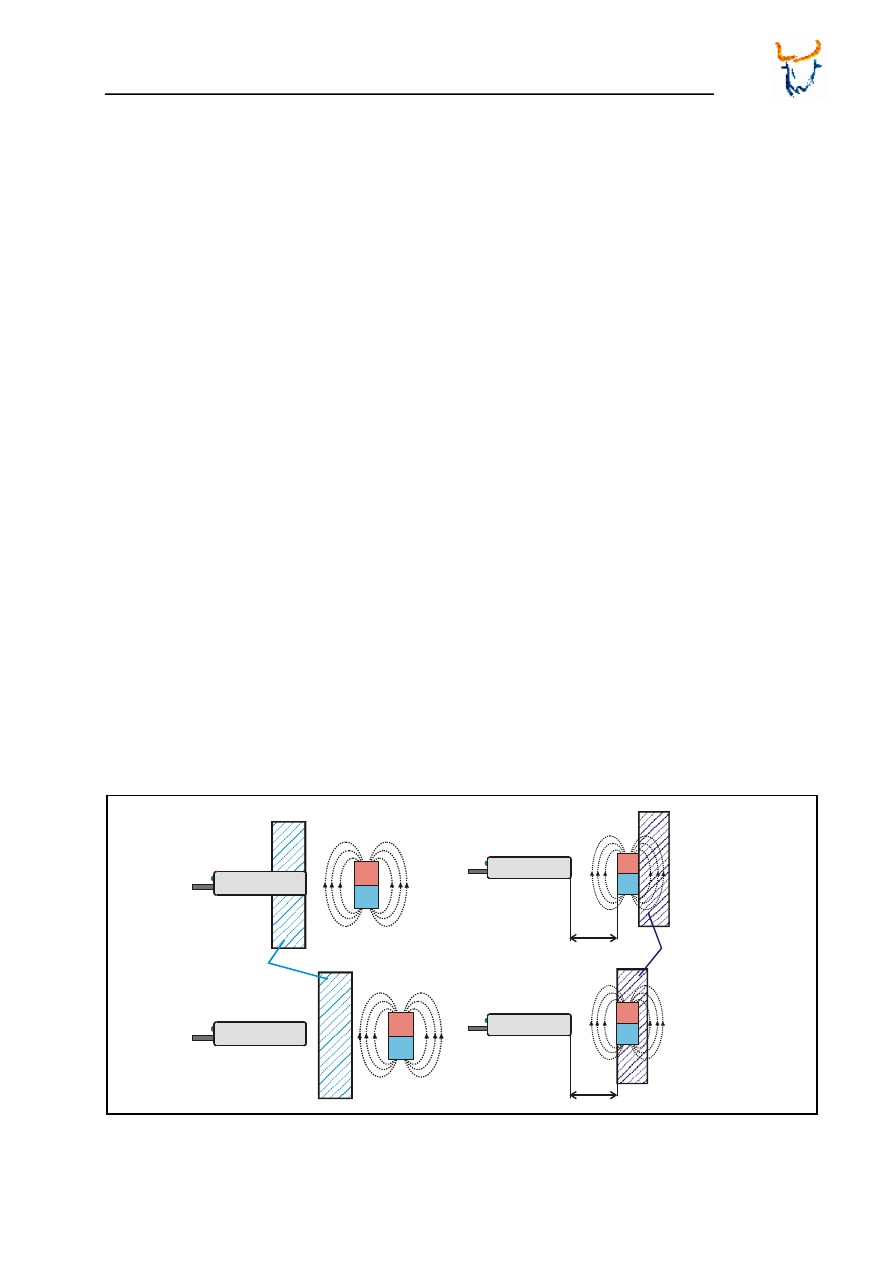
Komponenty mechatroniczne - Podręcznik
Minos
5.6
Warunki zabudowy
Czujniki magnetyczne mogą być mocowane lub osadzane w elemen-
tach wykonanych z dowolnego materiału nieferromagnetycznego. Bez
znaczenia dla czułości czujnika jest wówczas wielkość jego wysunięcia
ponad powierzchnię, w której jest on osadzony. Czoło czujnika może
być nawet zrównane z tą powierzchnią (Rys.5.16).
Jeśli czujnik musi być osadzony w materiale ferromagnetycznym, to
korzystne jest możliwie duże jego wysunięcie ponad powierzchnię ma-
teriału ferromagnetycznego. Wskazane jest też wprowadzenie dodat-
kowej warstwy izolacyjnej z materiału niemagnetycznego (dielektryka),
oddzielającej czujnik i ferromagnetyk.
Mocując magnes do powierzchni ferromagnetycznych należy liczyć się
z wystąpieniem efektu osłabienia pola magnetycznego magnesu lub
jego wzmocnienia. Wzmocnienie pola wystąpi wtedy, gdy magnes mo-
cowany jest na zewnętrznej powierzchni elementu ferromagnetyczne-
go a osłabienie, gdy jest on wpuszczony w głąb materiału ferromagne-
tycznego. W takim samym stopniu jak wzmocnienie zmieni się zakres
pracy czujnika.
Wprowadzenie między czujnik a magnes przedmiotu wykonanego z
materiału nieferromagnetycznego nie wpływa na zachowanie się czuj-
nika magnetycznego. Inaczej zachowa się czujnik, gdy między ma-
gnesem a czujnikiem pojawi się przedmiot ferromagnetyczny. Może to
w większości sytuacji doprowadzić do zmiany stanu wyjścia czujnika,
czyli do zakłócenia jego pracy.
CZUJNIK
Materiał
nieferromagnetyczny
CZUJNIK
S
N
S
N
CZUJNIK
1,2 x Sn
Materiał
ferromagnetyczny
CZUJNIK
0,6 x Sn
S
N
S
N
Rys.5.16: Oddziaływanie elementów wykonanych z materiałów ferromagnetycznych i niefer-
romagnetycznych na własności czujnika magnetycznego
145
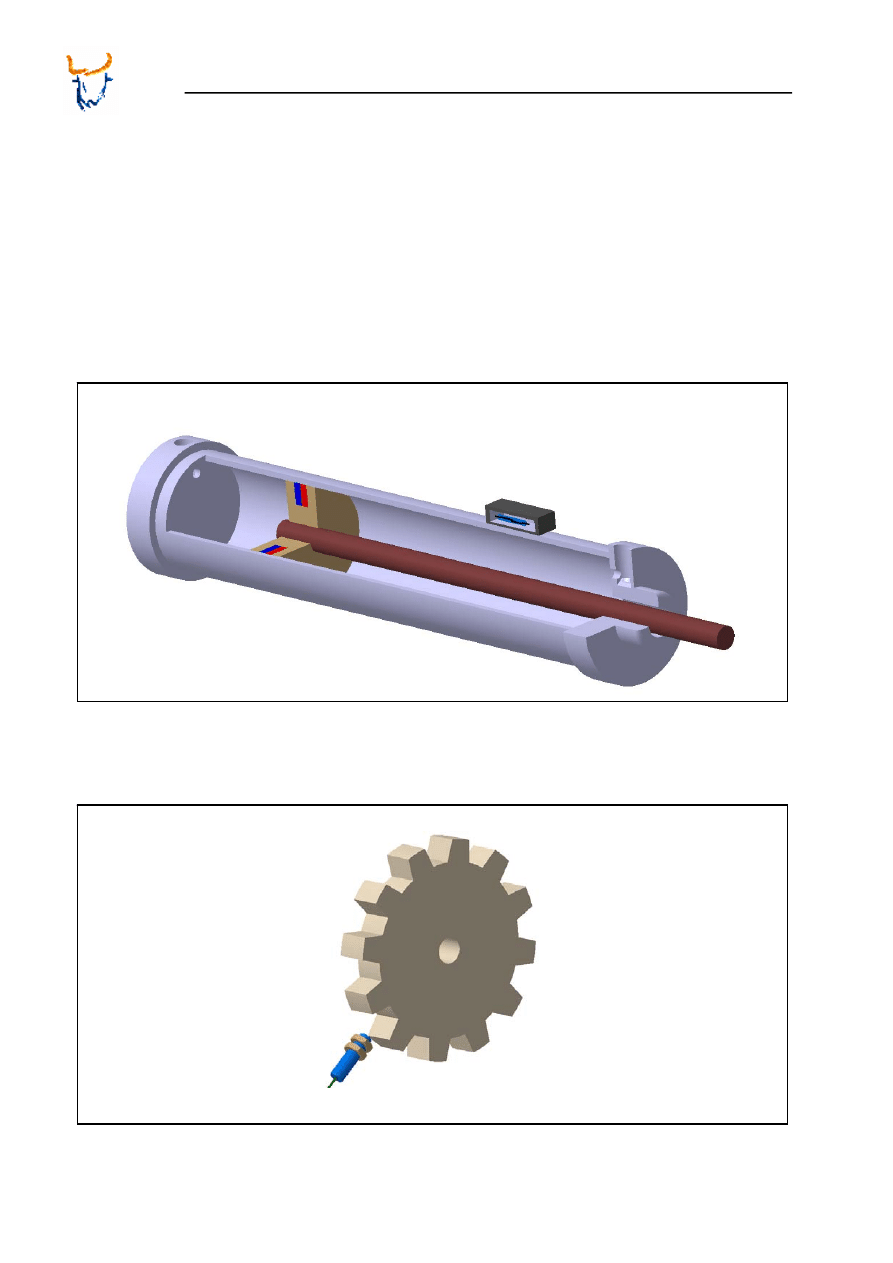
Komponenty mechatroniczne - Podręcznik
Minos
5.7
Aplikacje
Czujniki magnetyczne znajdują zastosowanie między innymi do:
- wykrywania obiektów znajdujących się za ściankami plastikowymi np.
wewnątrz rur lub pojemników,
- wykrywanie obiektów w agresywnych środowiskach poprzez ścianki
ochronne,
- wykrywania obiektów w obszarach o podwyższonej temperaturze,
dzięki możliwości wyprowadzania pola magnetycznego z pomocą
elementów ferromagnetycznych,
- wykrywania obiektów w ruchu postępowym lub obrotowym,
Rys.5.17: Wykrywanie
położenia tłoka poprzez niemagnetyczny korpus cylindra z użyciem
magnetycznego czujnika kontaktronowego
Rys.5.18: Pomiar
prędkości obrotowej magnetycznym czujnikiem Wieganda
146
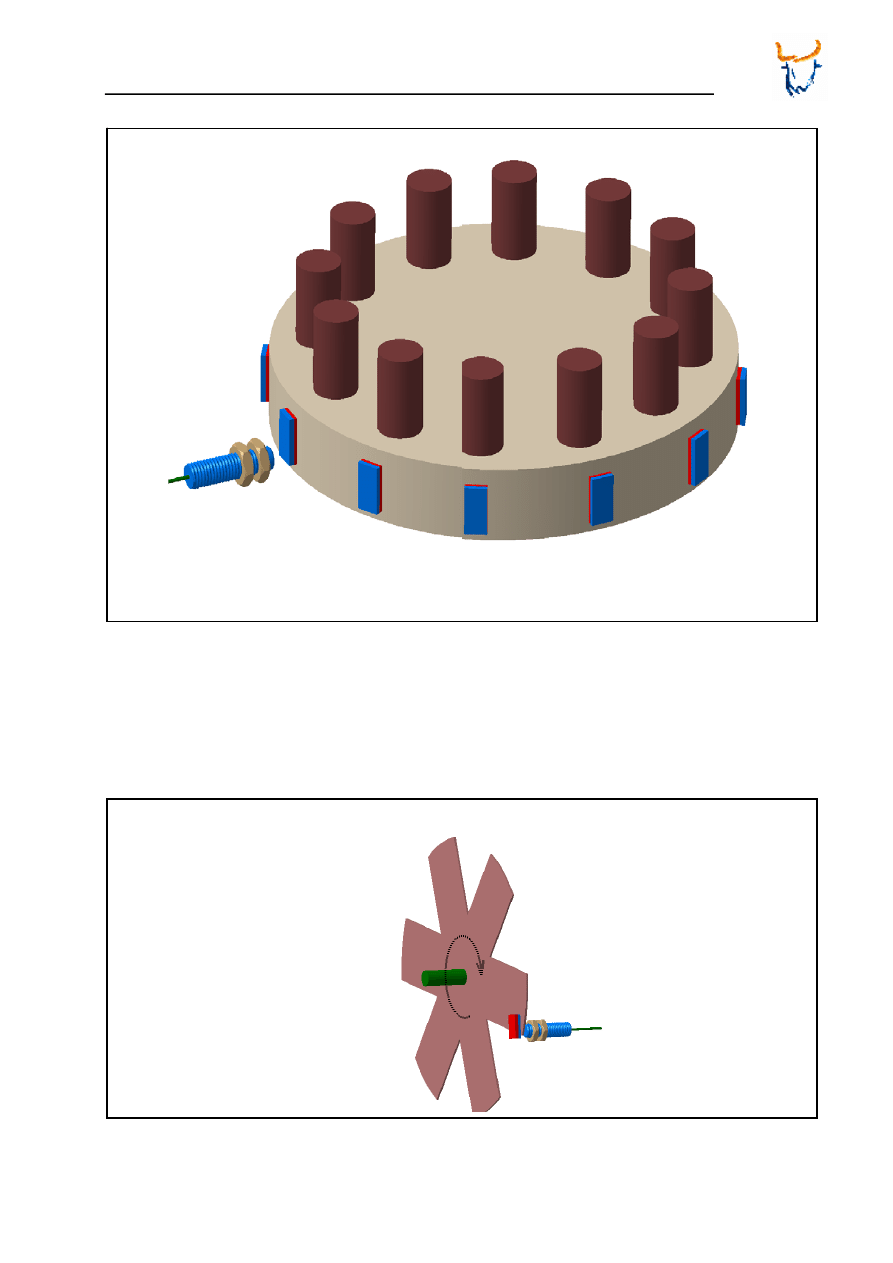
Komponenty mechatroniczne - Podręcznik
Minos
Rys.5.19: Wykrywanie pozycji kątowej stołu magnetycznym za pomocą magnetycznego czujnika
Halla
Rys.5.20: Pomiar prędkości obrotowej magnetycznym czujnikiem magnetorezystancyjnym
147
Wyszukiwarka
Podobne podstrony:
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
6 Podrecznik2 PL
7 Podrecznik PL
6 Podrecznik1 PL
8 Podrecznik PL
2 1Sozial podrecznik PL
APQP Podręcznik PL APQP 2
czujniki obr PL id 129030 Nieznany
2 2Projet podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
KAT Osłona czujnika clorius pl
PODRĘCZNIK UŻYTKOWNIKA PL
więcej podobnych podstron