
Systemy i funkcje mechatroniczne - Podręcznik
119
Minos
8
Projektowanie podsystemów mechatronicznych
8.1
Wprowadzenie
Ulepszenia techniczne w przemyśle, szczególnie w dziedzinie budowy
maszyn i urządzeń, udowadniają, że coraz bardziej skomplikowane
systemy techniczne są używane do realizacji wydajności, elastyczności
i wymagań jakościowych.
Dzięki temu następuje poszerzenie wiedzy technicznej jak również
powstaje coraz więcej specjalizacji w różnych dziedzinach nauki. To z
kolei nieuchronnie zwiększa różnorodność i możliwości wprowadzania
skomplikowanych funkcji sterowania.
Inżynierowie mechatroniki mogą zajmować się instalacją i utrzymaniem
złożonych maszyn, urządzeń i systemów. Polem ich działania są fabryki,
przestrzenie montażowe i usługowe. Praca zespołowa jest również
możliwa.
Aby zainstalować skomplikowany system sterowania, technik mechatroniki
może zająć stanowisko kierownika projektu. Aby móc poradzić sobie z
zadaniem musi być ekspertem ze szczególnymi zdolnościami.
Powinien wiedzieć wszystko, co dotyczy się sprawy rozwiązywania
problemów i być w stanie odgadnąć ogólne tło problemu. Pozwala mu
to koordynować pracę poszczególnych ekspertów i łączyć ich wiedzę
w całość, tak aby powstał optymalny, złożony, funkcjonalny i wydajny
system.
Planując techniczne systemy ochrony, należy pamiętać o:
-
zdefiniowaniu problemu,
-
projekcie systemu,
-
wdrożeniu systemu,
-
obsłudze i utrzymaniu systemu.
Aby radzić sobie z takimi złożonymi systemami, potrzebna jest obszerna
wiedza z zakresu elementów użytych w przepływie energii i informacji,
oraz możliwości ich łączenia i kombinacji.
Dlatego ważne jest dla eksperta myślenie nastawione na system,
przetwarzanie i organizowanie już w początkowej fazie szkolenia.
Systemy i funkcje mechatroniczne - Podręcznik
120
Minos
8.1.1 Pojęcie mechatroniki
Pojęcie systemu jest postrzegane jako porównywalna sekwencja, która
tworzy zrozumiały obraz powiązań między różnymi maszynami
i urządzeniami. System w tym wypadku jest ograniczonym i
funkcjonalnym układem kilku urządzeń, które zostały użyte razem, aby
wykonywać pewną funkcję.
Ograniczanie (delimitacja) wspomaga monitorowanie systemu i zależy
od obserwowanego obiektu. Urządzenie zasilające, obrabiarka, jak
również urządzenie montażowe czy też fabryka mogą być definiowane
jako system.
Słowo mechatronika to kombinacja słów: mechanika i elektronika.
Również technologia komputerowa należy do dziedziny mechatroniki.
Te składowe są traktowane jako zintegrowane podczas cyklu systemu.
Obejmuje to także modelowanie, ulepszanie i produkcję.
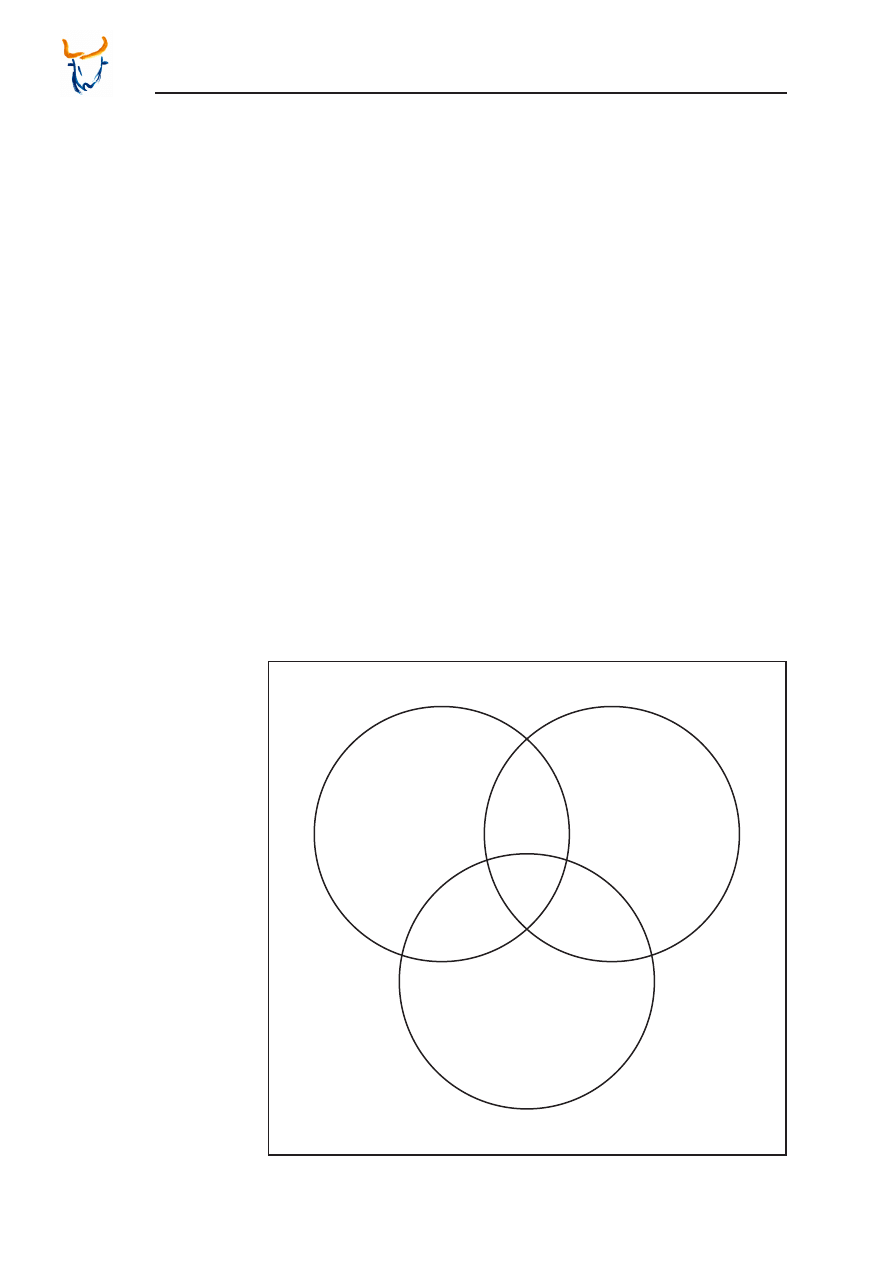
Na skrzyżowaniu trzech głównych dziedzin powstają nowe
specjalności. Elektromechanika łączy elektrotechnikę z pneumatyką
i hydrauliką. Mechanika i oprogramowanie są używane na
przykład w systemach wirtualnej rzeczywistości w animacji ruchu.
Oprogramowanie i elektronikę można też znaleźć w sterownikach PLC
i sterowaniu numerycznym (ang. Numerical Control).
Rys. 8.1:
Elementy mechatroniki
Mechanika
Elektronika
Technika komputerowa
Mecha-
tronika
gramowanie
mechanikii
gramowanie
elektronikii
Elektro-
mechanika
Opro-
Opro-
Systemy i funkcje mechatroniczne - Podręcznik
121
Minos
Złożony system może składać się z kilku podsystemów i części.
Następujący przykład wyjaśnia powiązania w mechatronice.
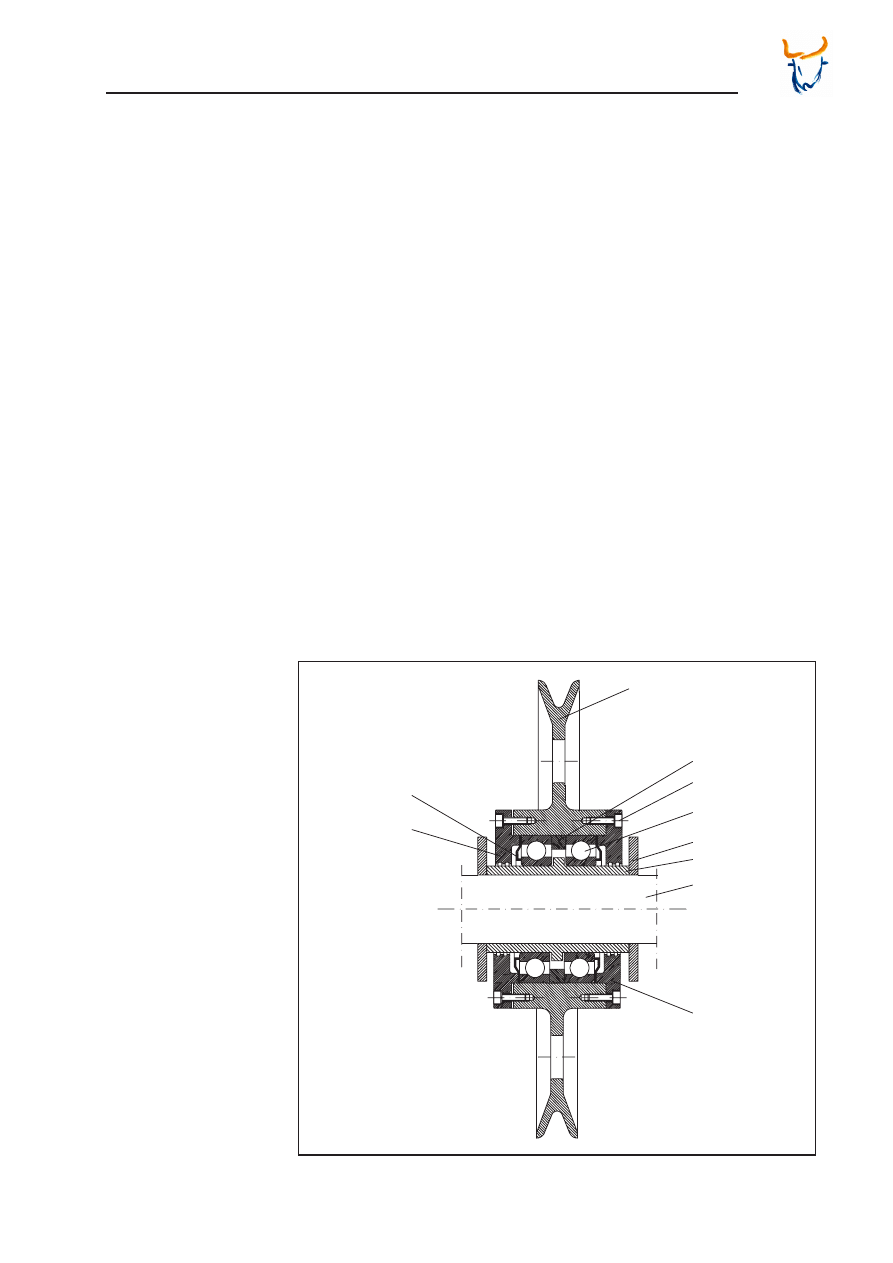
Rysunek poniżej, pokazuje rolkę kołowrotu linowego. Niektóre pojedyncze
elementy strukturalne kołowrotu linowego powinny być obrobione,
następnie elementy wymienione poniżej powinny być zmontowane.
(1) piasta
(2) tuleja wału napędowego
(3) tarcza (x2)
(4) łożysko kulkowe z rowkiem (x2)
(5) dociskana sprężyną płyta ochronna (x2)
(6) kołnierz (x1)
(7) bęben linowy
(8) sześciokątna śruba (x8)
(9) pierścień sprężyny (x8)
(10) pierścień przekładni
(11) kołnierz (x1)
Obrabianie kolejnych komponentów wykonuje się według określonych
wskazówek.
8.1.2 Obrabianie i instalacja pojedynczych części
Rys. 8.2.
Kołowrót linowy
5
11
6
1
2
3
4
7
8, 9
10
Przykład

Systemy i funkcje mechatroniczne - Podręcznik
122
Minos
Instalacja powinna odbywać się zgodnie z następującymi
wskazówkami:
1) przed instalacją: składamy piastę (1) z tuleją wału napędowego
(2),
2) skręcamy bęben linowy (7) z kołnierzem (6) używając sześciokątnej
śruby (8) i pierścienia sprężyny (9),
3) umieszczamy dociskaną sprężyną płytę ochronną (5.1) w
zmontowanym bębnie linowym w kroku 2,
4) dociskamy kulkowe łożysko z rowkiem (4.1) do zmontowanego
bębna linowego,
5) umieszczamy piastę (1) z tuleją wału napędowego (2) w
zmontowanym bębnie linowym,
6) dociskamy pierścień przekładni (10),
7) dociskamy kulkowe łożysko z rowkiem (4.2),
8) umieszczamy dociskaną sprężyną płytę ochronną (5.2) w
zmontowanym bębnie linowym,
9) ustawiamy kołnierz (11),
10) przykręcamy kołnierz (11) do zmontowanego bębna linowego
używając sześciokątnej śruby (8) i pierścienia sprężyny (9),
11) łączymy dwie tarcze (3.1) i (3.2).
Wybór odpowiednich elementów systemowych następuje według
następujących wskazówek:
-
możliwie dokładne sformułowanie żądanego celu,
-
koszty inwestycji i wykonania,
-
wymagania techniczne, wymagania techniczne klienta,
dokumentacja,
-
reakcja na zaburzenia, sprawdzenie niezawodności,
-
przepisy BHP,
-
warunki działania,
-
wymogi utrzymania,
-
pakiet udziałów,
-
sytuacja na rynku, potencjalni i rzeczywiści konkurenci,
-
trendy na rynku,
-
preferowani dostawcy,
-
możliwości utrzymania użytkownika,
-
wymogi unifikacji (popyt na części zamienne),
-
całościowa dostawa z jednego źródła, wraz ze sterowaniem.
Systemy i funkcje mechatroniczne - Podręcznik
123
Minos
Zasadnicze wymagania przy budowie złożonych systemów:
-
kolejność wykonywanych czynności,
-
analiza ruchu,
-
siły i momenty,
-
przebieg naprężeń i obciążeń,
-
warunki wyboru nominalnego ciśnienia podczas użycia sprzętu
pneumatycznego lub hydraulicznego,
-
skoki i prędkości,
-
sterowanie lub regulacja,
-
przyśpieszenie i określenie czasu,
-
zachowanie dynamiczne i sztywność,
-
warunki montażu,
-
wymagania dotyczące rodzaju transferu energii,
-
praca zmianowa,
-
miejscowe i pozamiejscowe projekty,
-
warunki pracy (czas włączenia, różnice w temperaturze oleju,
wymagane chłodzenie).
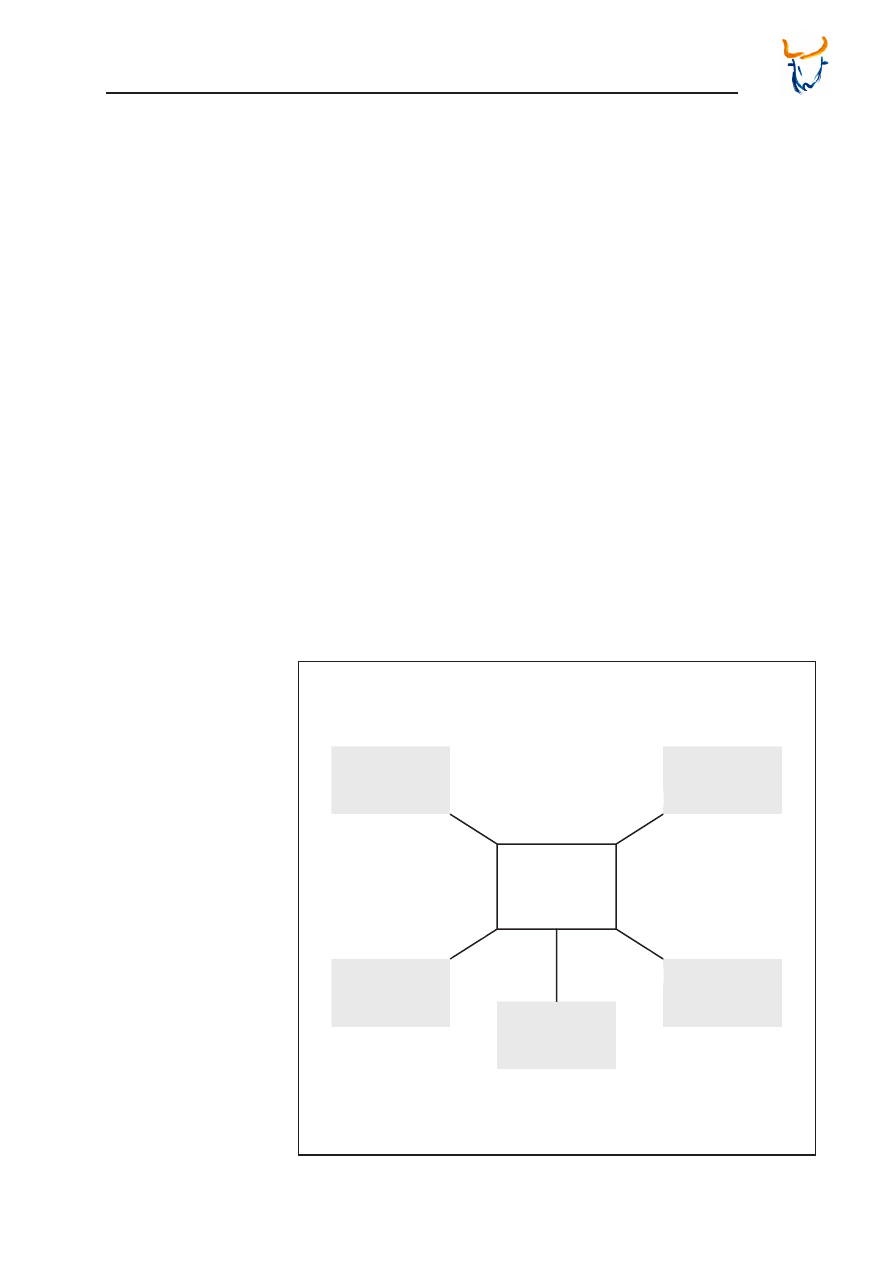
Podsystemy pokazane na rysunku poniżej także powinny być wzięte
pod uwagę.
Rys. 8.3:
Podsystemy
Elektro-
pneumatyka
Elektro-
hydraulika
System
złożony
Sensoryka
Elektro-
technika
Sterownik
(PLC)
Systemy i funkcje mechatroniczne - Podręcznik
124
Minos
Istnieje różnica pomiędzy sterowaniem (sekwencją sterowania) a
regulacją (obwodem regulacji).
Sterowanie to proces gdzie jedna lub więcej wielkości działa na inne
wielkości według wzoru i reguł systemu sterowania. W tym wypadku
wielkości wpływające na inne nazwane są wartościami wejściowymi, a
te, na które one wpływają, wartościami wyjściowymi.
Typową ścieżką dla sterowania jest otwarta ścieżka działania. Wartości
wyjściowe nie wpływają na wartości wejściowe. Dlatego jakiekolwiek
odchylenie wartości wyjściowych od żądanej wartości nie może być
wykryte i poprawione.
Płyn wypływa ze zbiornika w sposób ciągły. Aby uchronić zbiornik przed
wyczerpaniem, użyty został zawór uzupełniający regularnie zbiornik
płynem. Dodatkowa ilość płynu jest dostosowywana tak, że ubytek jest
uzupełniony.
W przypadku tymczasowego wzrostu lub spadku wypływu sterowanie
nie dostarcza większej czy mniejszej ilości płynu. Do tego wymagany
jest regulator.
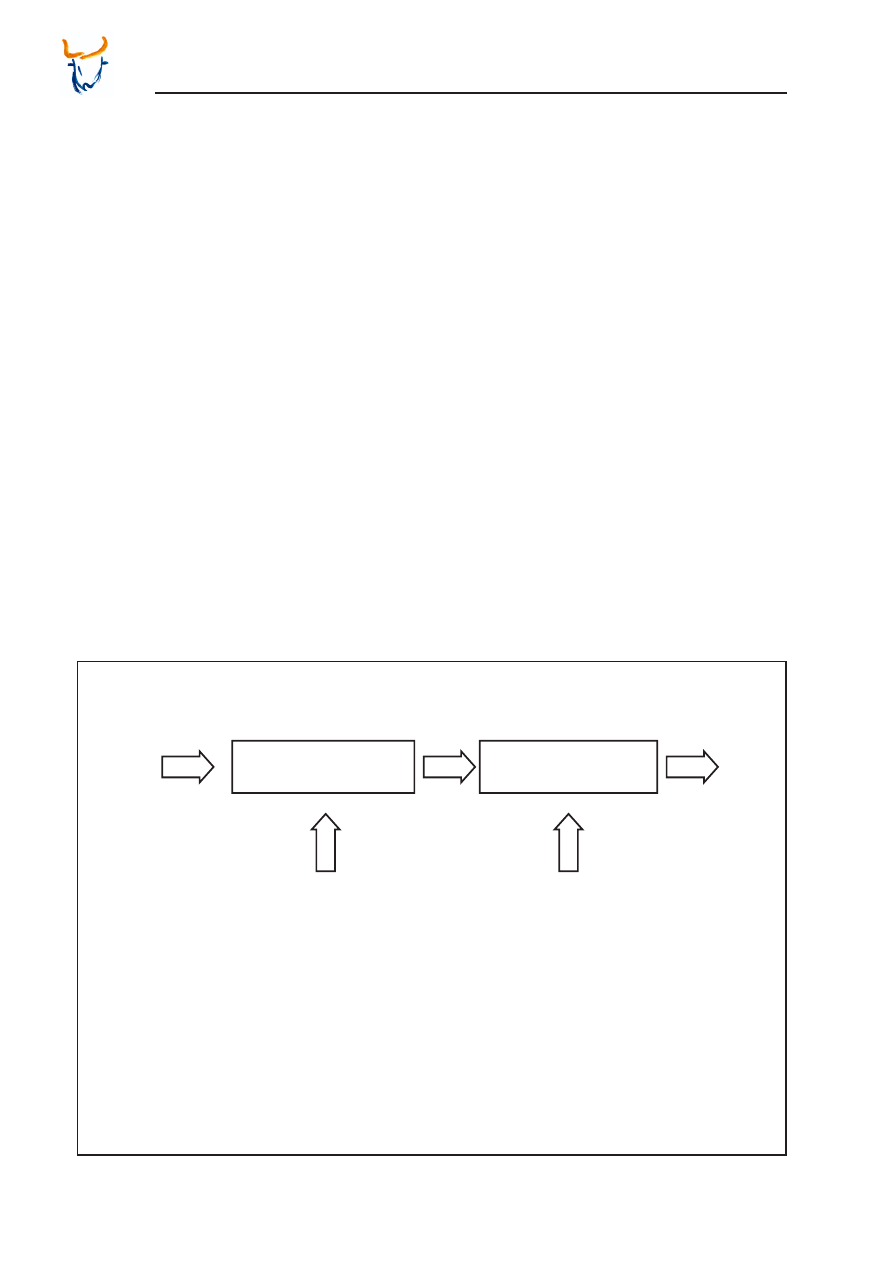
8.2 Projektowanie sterowania
w
y
x
Element wykonawczy
Obiekt sterowany
Wartość główna (wartość referencyjna)
Wartość zadana
Wartość sterowana
Wartości zakłócające
w
y
x
z
n
z
2
z
1
Rys. 8.4:
Przepływ sygnału w sterowaniu
Przykład
Systemy i funkcje mechatroniczne - Podręcznik
125
Minos
Sterowanie jest używane, gdy wielkość zakłóceń jest mała i może być
zignorowana. Na przykład, drzwi można otworzyć za pomocą przycisku
i automatycznie zamknąć po upływie pewnego czasu.
Zalety sterowania sekwencyjnego:
-
zachowanie otwartego przepływu trudniej obserwować niż
przepływu zamkniętego,
-
jeśli wielkość zakłócenia „z” zaczyna wpływać, możliwa jest szybka
interwencja (nie trzeba czekać na wpływ na końcową wielkość, jak
w zamkniętym przepływie. Poprawka może zostać wprowadzona
od razu),
-
nie trzeba mierzyć wartości końcowej.
Wady sterowania sekwencyjnego:
-
jeśli występują zakłócenia, muszą zostać zmierzone,
-
proces (zachowanie lub model) muszą być znane, aby wyznaczyć
i uaktualnić algorytm sterowania,
-
nie ma potwierdzenia czy interwencja sterowania pozwoliła
osiągnąć żądaną wartość końcową.
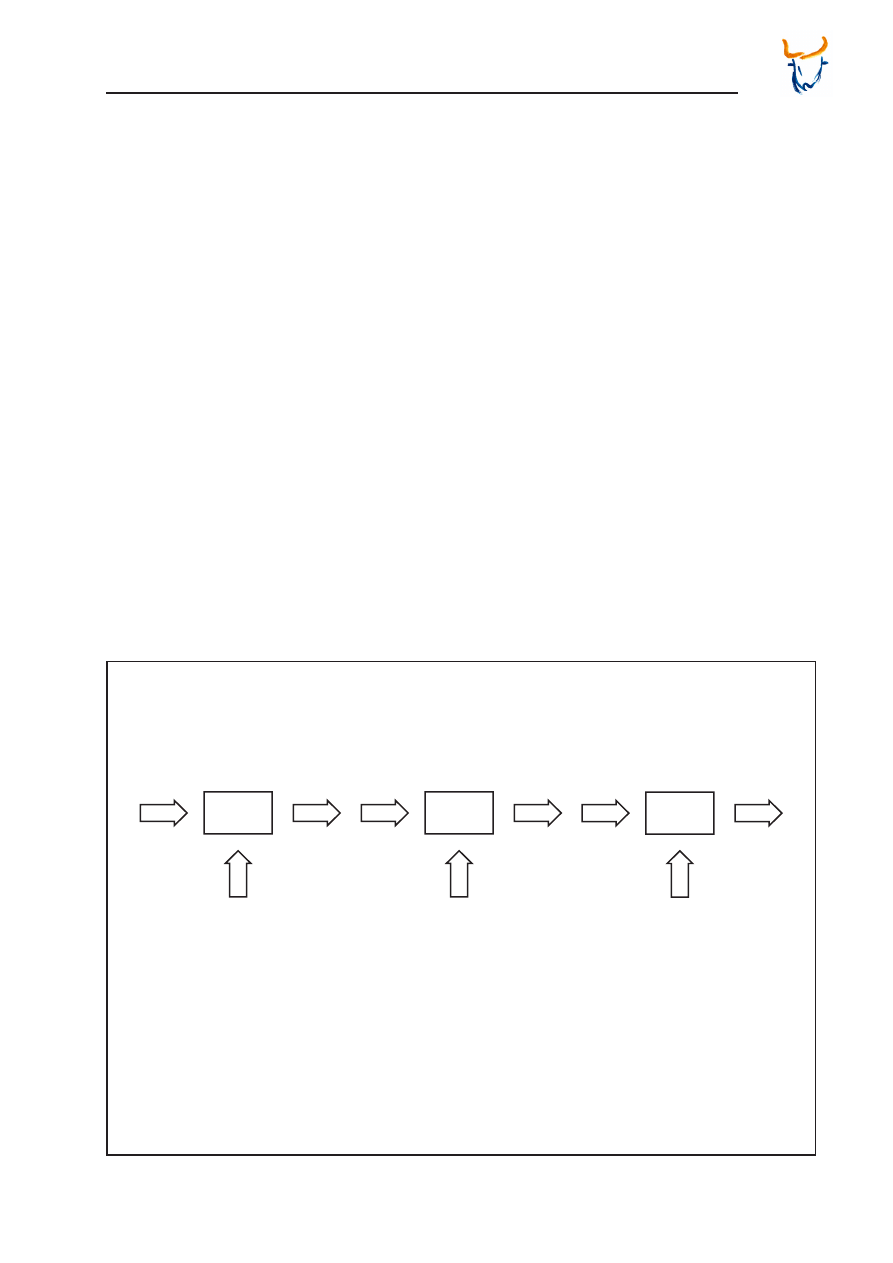
X
i,1
X
o,1
T
1
Element przekazujący
Wartość wejściowa
Wartość wyjściowa
Wartość zakłócająca
T
X
i
X
o
Z
Z
1
X
i,2
X
o,2
T
2
Z
2
X
i,3
X
o,3
T
3
Z
3
Rys. 8.5:
Kolejność elementów przekazujących w sterowaniu sekwencyjnym
Systemy i funkcje mechatroniczne - Podręcznik
126
Minos
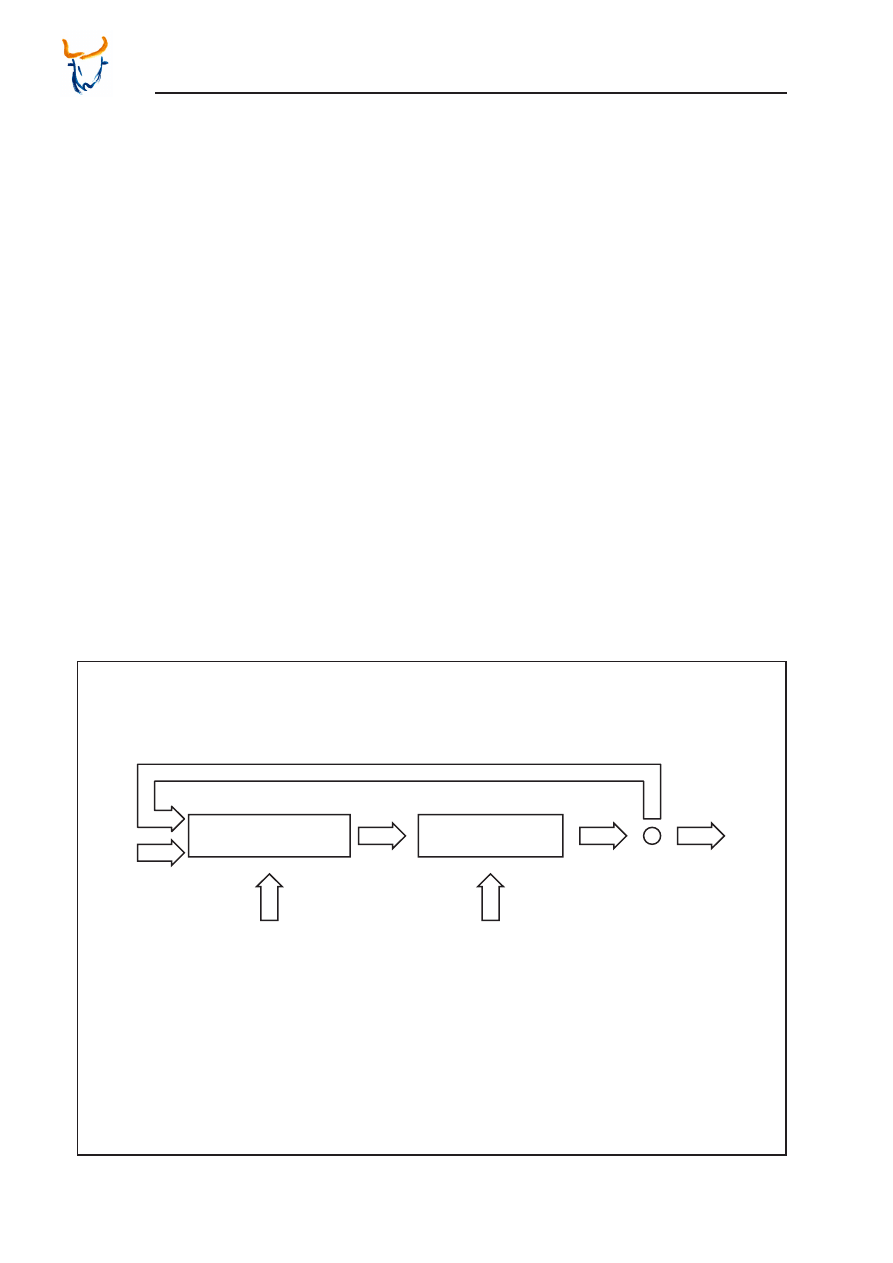
Rys. 8.6:
Plan przepływu sygnału w regulatorze
Wartość zadana (Wartość referencyjna)
Wartość sterująca
Wartość sterowana
Wartości zakłócające
w
y
x
z
n
w
y
x
System regulujący
Obiekt regulowany
z
2
z
1
Sprzężenie zwrotne
x
8.2.1 Regulacja
W systemach regulacji, wartość regulowana jest stale mierzona. Wartość
jest porównywana z wartością zadaną. Mierzona wartość jest również
oznaczona jako wartość rzeczywista lub chwilowa, podczas gdy wartość
zadana nazywana jest wartością główną (referencyjną).
Wartość regulowana zmienia się według swojego odchylenia od wartości
zadanej. W rezultacie otrzymujemy przepływ w zamkniętym obiegu.
Dlatego regulacja jest także nazywana pętlą regulacji.
System regulacji wykorzystywany jest do stałego mierzenia poziomu płynu
w zbiorniku. Regulator wykrywa każdy odpływ płynu i pozwala dostarczać
nowy płyn. Ilość płynu wpuszczanego do zbiornika jest dostosowywana
przez regulator, aby uzupełnić braki.
Wady pętli regulacji:
-
regulacja następuje tylko w wypadku odchylenia regulowanej
wartości od zadanej.
Przykład
Systemy i funkcje mechatroniczne - Podręcznik
127
Minos
Złożone sterowania dzielą się na związane ze sprzętem i oprogramowaniem.
Sterowniki sprzętowe to urządzenia i bloki funkcyjne należące do
elektrotechniki i elektroniki, jak również elementy pneumatyki i hydrauliki,
oraz sprzęt z mikroprocesorami (PLC) i optoelektronika.
Urządzenia i bloki funkcyjne (sprzęt) są używane do:
-
gromadzenia informacji,
włącznie z interfejsem do połączenia ze sprzętem sterującym
-
dostarczania informacji,
urządzenia takie jak potencjometr, klawiatura, taśmy
magnetyczne, itd.
-
przekazywania informacji,
takie urządzenia jak przewodniki elektryczne i optyczne, które
przekazują analogowe lub dyskretne sygnały, interfejs
-
przetwarzania informacji,
urządzenia takie jak aktuatory, PLC
-
wyjścia informacji (komunikacja z człwowiekiem),
urządzenia monitorujące i rejestrujące, urządzenia do
przechowywania i archiwizowania, środki dźwiękowe
-
działań regulujących,
realizowane za pomocą zaworów, przełączników itd.
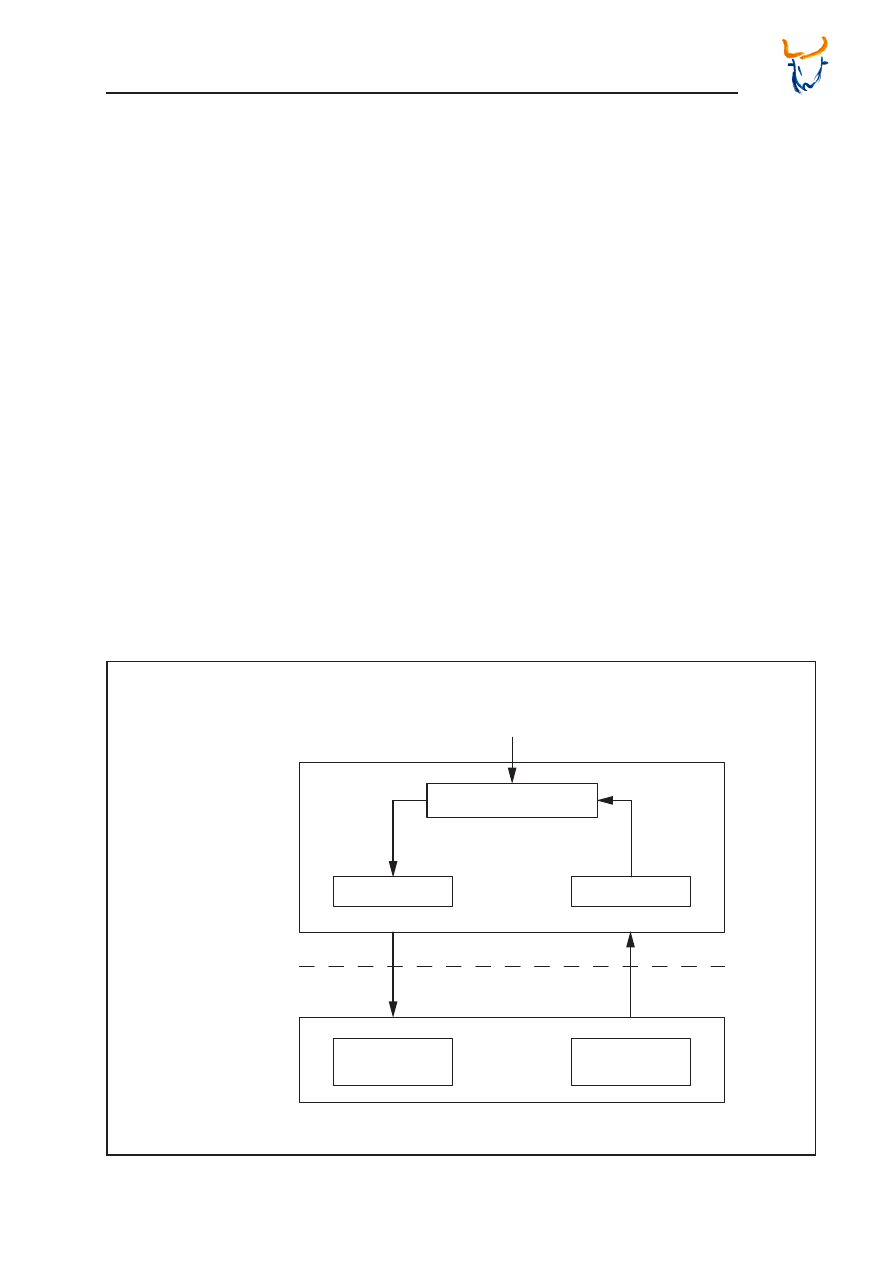
Przepływ
materiału
System
przetwarzania
Aktuatory
Czujniki
Przetwarzanie sygnału
Program sterujący
Źródło zasilania sterowania
System
sterowania
System
techniczny
Rys. 8.7:
Struktura systemu sterowania
8.2.2 Złożone sterowania

Systemy i funkcje mechatroniczne - Podręcznik
128
Minos
Sterowania złożone mogą być porównane według różnych kryteriów.
Porównania można dokonać według:
-
sterowania (sekwencji sterowania),
-
regulacji (pętli regulacji),
-
funkcji (sterowanie stałowartościowe, sterowanie pilotowe,
sterowanie czasowe, sterowanie ciągłe, sterowanie krokowe,
sterowanie sekwencyjne),
-
informacji (sygnał),
-
przetwarzania informacji (sterowniki dyskretne, cyfrowe,
wielopunktowe, binarne),
-
podstawy czasowej (taktowane, nietaktowane),
-
sposobu programowania (program zapamiętywany i
programowany konstrukcyjnie).
Co więcej, można porównać sterowania według rodzaju przekazywania
ruchu i siły.
Przekazanie siły i ruchu może być wykonane używając różnych metod,
na przykład:
-
mechanicznie (za pomocą napędów),
-
elektrycznie (za pomocą elektrodynamicznych lub
elektromagnetycznych linii siły),
-
pneumatycznie (za pomocą sprężonego powietrza, potrzebny
kompresor),
-
hydraulicznie (za pomocą płynów, takich jak woda, olej,
gliceryna),
-
metodą mieszaną(pneumo-mechanicznie, hydro-pneumatycznie,
elektrohydraulicznie, elektro-pneumatycznie, hydro-elektryczne i
hydro-elektroniczne systemy).
8.2.3 Kryteria porównawcze sterowań złożonych
Systemy i funkcje mechatroniczne - Podręcznik
129
Minos
8.3 Części zasilania i sygnału w sterowaniach złożonych
Systemy sterowania są ogólnie dzielone na części sygnałowe i części
zasilania (energii).
Element zasilania może działać na zasadzie pneumatyki, hydrau-
liki lub elektryki. Funkcją pneumatycznego elementu zasilania jest
przekształcanie energii elektrycznej w pneumatyczną a następnie w
energię mechaniczną.
W hydraulicznych elementach zasilania energia elektryczna jest zami-
eniana na hydrauliczną a następnie na energię mechaniczną. Natomiast,
elementy zasilania używane do obsługi napędów elektrycznych zmieniają
energię elektryczną w energię mechaniczną.
Część sygnałowa zawiera urządzenia do dostarczania sygnału, takie
jak przyciski, do przetwarzania sygnału (PLC, przekaźniki) i do kontroli
dopływu energii.
Funkcją części sygnału jest wytwarzanie i przetwarzanie sygnałów ele-
ktrycznych i ich przekazywanie przez interfejsy.
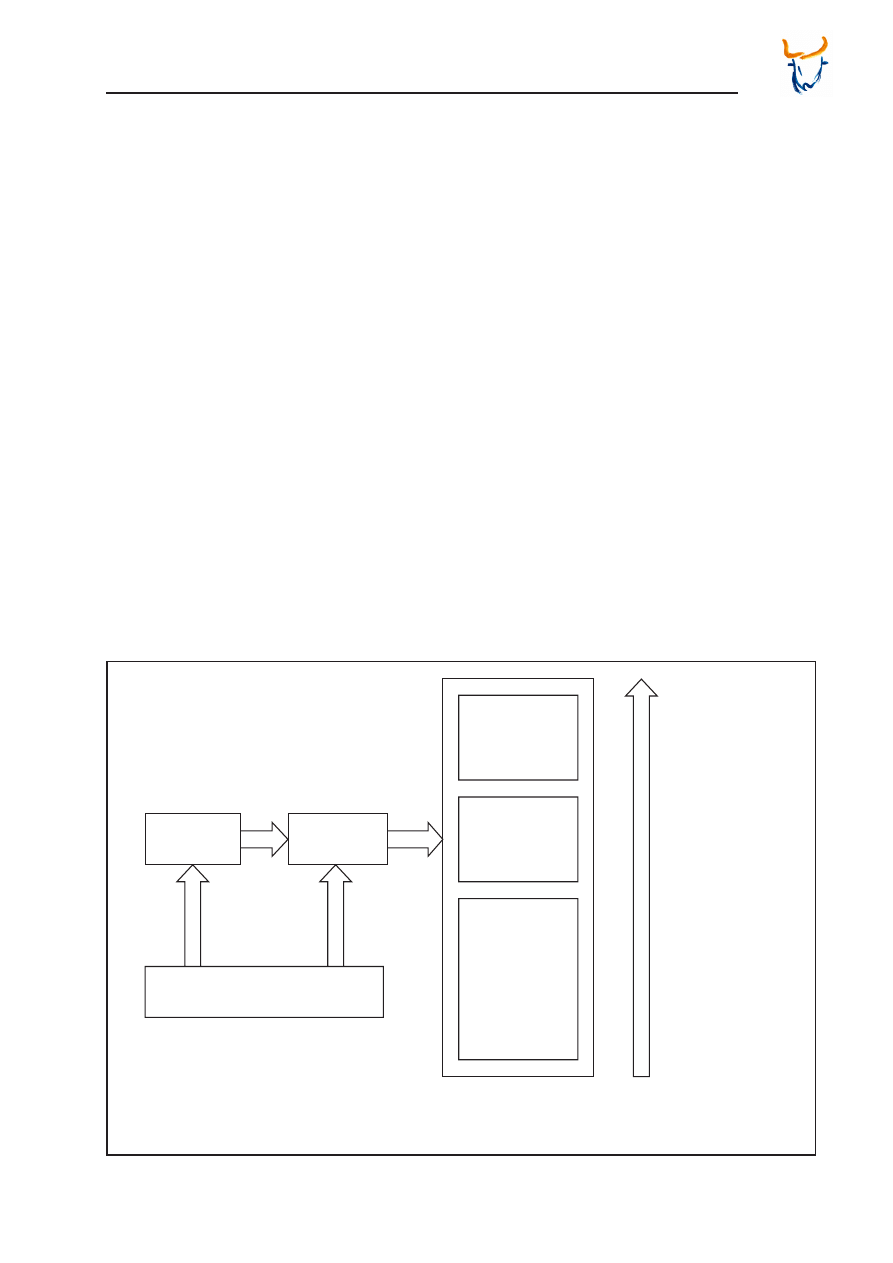
Rys. 8.8:
Struktura złożonego sterowania
Źródło zasilania sterownika
Przetwarzanie
sygnału
Wejście
sygnału
Sekcja źródła
energii
Przetwarzanie
energii
Przygotowanie
medium
roboczego
Sekcja kontroli
energii
Część zasilania
Część sygnałowa
Sekcja kontroli
energii
Przepływ energii
Systemy i funkcje mechatroniczne - Podręcznik
130
Minos
Elektrohydraulika
Elektropneumatyka
Elektrotechnika
1. Napęd
hydrauliczny siłownik
roboczy,
silnik hydrauliczny
pneumatyczny siłownik
roboczy,
pneumatyczny silnik
elektryczny napęd
liniowy,
elektryczny silnik
(silnik DC, silnik AC)
2. Sekcja kontrolii
energii
- elementy
wykonawcze
- elementy sterowania
elementy sygnałowe
rozdzielacze
hydrauliczne
ciśnienie hydrauliczne,
zawory blokujące
i przepływowe
rozdzielacze
pneumatyczne
ciśnienie
pneumatyczne,
zawory blokujące
i przepływowe,
rozdzielacze
pneumatyczne
styczniki
diody, warystory,
przekaźniki
3. Sekcja zasilania
energią
- wytwarzanie energii
- przygotowanie
energii
hydrauliczny system
napędowy
ogrzewanie,
chłodzenie, filtr
kompletny kompresor
lub stacja kompresyjna
suszarka, filtr
sieć elektryczna,
akumulatory (baterie)
transformatory
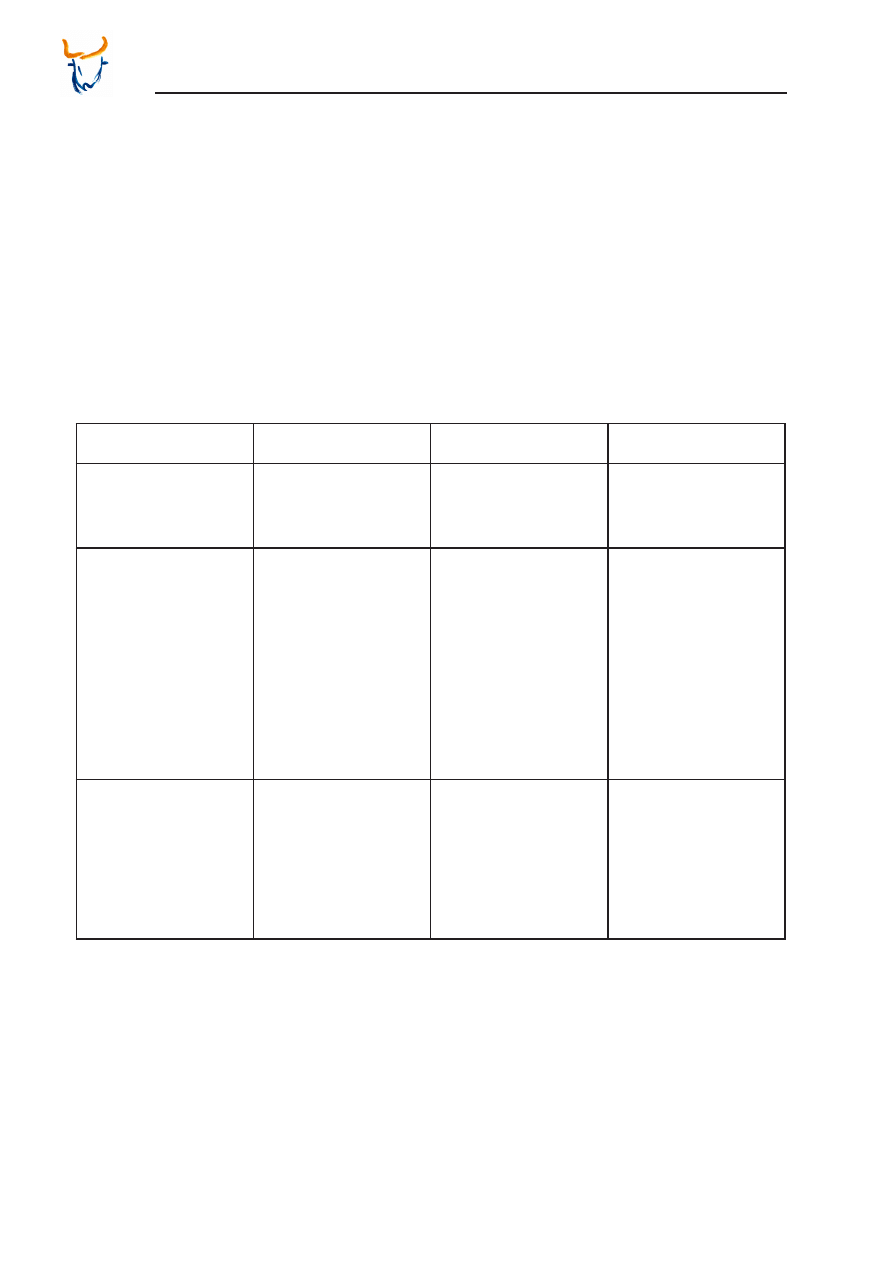
Tabela 8.1: Porównanie złożonych sterowań
Siłowniki robocze w hydraulice i pneumatyce są używane jako elementy
napędowe. Natomiast, silniki elektryczne są najważniejszymi elementami
napędowymi w elektrotechnice.
Sterowania i elementy wykonawcze są podobne w hydraulice i pneumatyce.
Zawory mają za zadanie wpływać na medium przenoszenia energii. W
elektrotechnice, zazwyczaj odbywa się to za pomocą przekaźników i
styczników.
Przygotowanie dopływu energii w hydraulice odbywa się bezpośrednio
w maszynie dzięki agregatowi hydraulicznemu. Natomiast, sprężone
powietrze używane w pneumatyce jest centralnie wytwarzane dzięki
kompresorowi zewnętrznemu. Energia elektryczna jest wytwarzana w
oddalonych elektrowniach.

Systemy i funkcje mechatroniczne - Podręcznik
131
Minos
8.3.1
Część zasilania
Sterowania elektro-pneumatyczne i elektro-hydrauliczne są w zasadzie
używane w przemyśle w celu połączenia zalet elektrotechniki z jednej
strony z hydrauliką i pneumatyką z drugiej. Dlatego też, od tego momentu,
te rodzaje sterowań będą omawiane.
Definicja:
Elektro-hydraulika:
Hydraulika w przemyśle oznacza koncepcję wszystkich mechanicznych
procesów, gdzie ruch i siła są przekazywane za pomocą płynów (napęd,
sprzęt regulacji i sterowania, gdzie ruch i siła są generowane używając
ciśnienia płynów).
Połączenie z elementami elektrycznymi (m.in.magnesy) prowadzi do
powstania elektro-hydrauliki.
Elektro-pneumatyka:
Pneumatyka obejmuje wszelkie użycie urządzeń pneumatycznych.
Urządzenia pneumatyczne to maszyny i agregaty, które działają
używając sprężonego powietrza lub próżni.
Połączenie urządzeń pneumatycznych i elektrotechnicznych (magnesy)
prowadzi do powstania elektro-pneumatyki.
Elektrotechnika:
Elektrotechnika obejmuje wszystkie techniczne urządzenia, które
używają właściwości prądu elektrycznego i pól elektrycznych oraz
magnetycznych.
Elektrotechnika dzieli się na:
-
technologię energii elektrycznej,
-
technologię komunikacji,
-
ogólną inżynierię elektryczną,
-
technologię półprzewodników i mikroelektronikę.
Elementy sterowań pneumatycznych i hydraulicznych są głównie
obsługiwane używając energii elektrycznej (elektromechanicznie lub
elektronicznie).
W zakresie mechatroniki elektryczne napędy są ważnym elementem
łączącym, pomiędzy mechanicznym i elektrycznym sprzętem w
maszynach.
Maszyna elektryczna jako element napędowy odgrywa dominującą rolę
we wszystkich dziedzinach gospodarczych. Jej użycie ciągle wzrasta.
Wydajność systemu jest ważnym czynnikiem przy wyborze elektrycznego
napędu.
Systemy i funkcje mechatroniczne - Podręcznik
132
Minos
Elektrohydraulika
l
Elektropneumatyka
Elektrotechnika
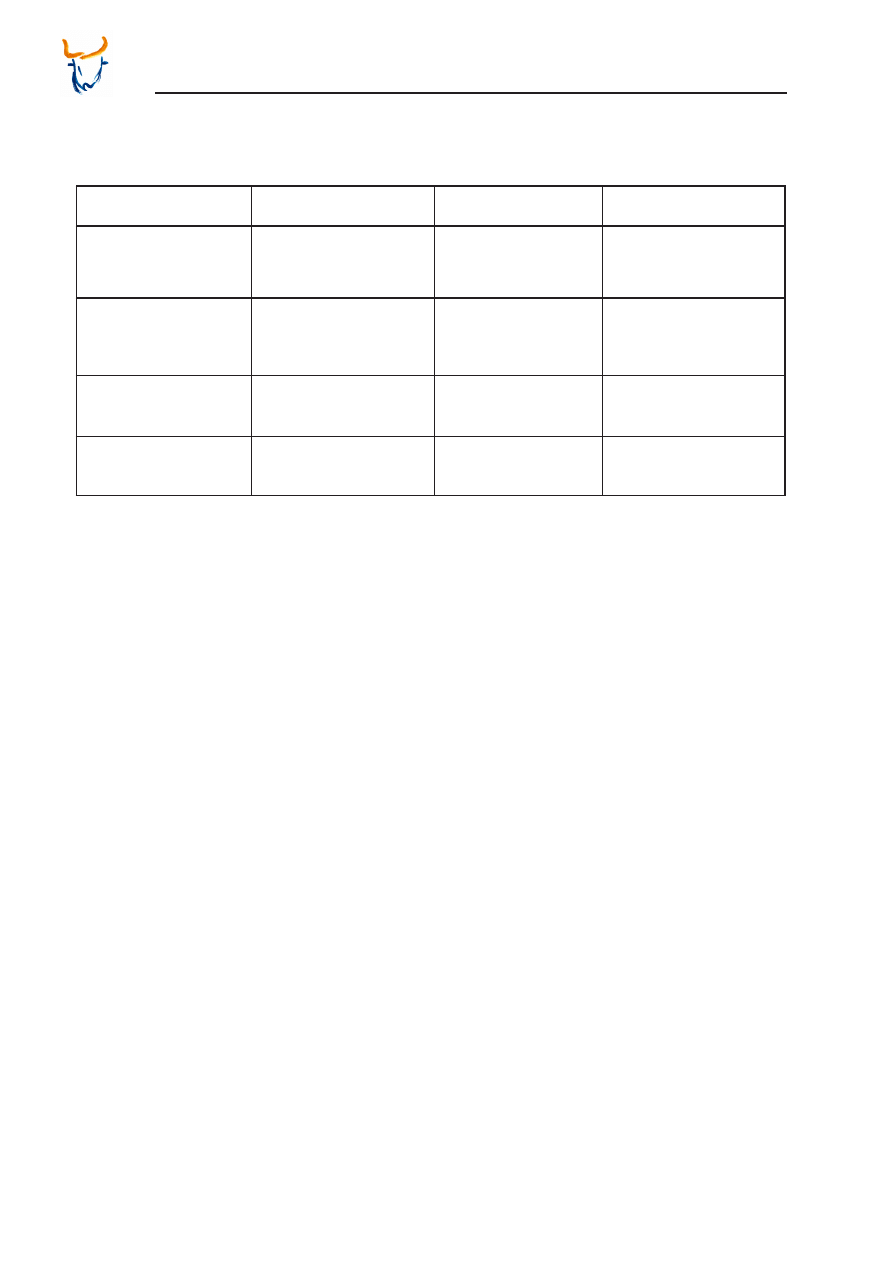
Pojęcia
greckie słowo „hydro”
znaczy woda
greckie słowo
„pneuma”
znaczy oddech
Budowa systemu
składa się z elementów
hydraulicznych i
elektrycznych
składa się z elementów
elektrycznych
i elektronicznych
Ruchy i siły
z formy hydraulicznej
w mechaniczną
składa się z
elementów
pneumatycznych
i elektrycznych
z formy
pneumatycznej
w mechaniczną
z formy elektrycznej
w mechaniczną
Odbiór sygnału
i przetwarzanie
używając elementów
elektrycznych
i elektronicznych
używając elementów
elektrycznych
i elektronicznych
używając elementów
elektrycznych
i elektronicznych
Tabela poniżej, pokazuje podstawowe porównanie systemów:
Tabela 8.2: Porównanie systemów
Różne media przenoszących energię są używane w części zasilania
sterwania, w zależności od użytego rodzaju systemu.
Wymagania mediów przenoszących energię w hydraulice i
pneumatyce:
Energia przenoszona przez media w hydraulice i pneumatyce to ciśnienie.
Wszystkie materiały, które pozwalają na równomierne rozłożenie
ciśnienia we wszystkich kierunkach, dzięki zdolności cząstek materiału
do przemieszczania i deformacji pod wpływem sił zewnętrznych, mogą
być używane do transferu ciśnienia.
Opór cząsteczek materiału w przeciwieństwie do przemieszczania się
jest oznaczony jako lepkość. Medium przenoszące energię ciśnienia,
zdolny do przechowywania i przewodzenia energii, jest oznaczone jako
nośnik energii.
Funkcje mediów przenoszacych energię:
-
przenoszenie sił (energia ciśnienia),
-
smarowanie ruchomych części konstrukcji,
-
rozpraszanie ciepła,
-
tłumienie hałasu i drgań,
-
przesyłanie sygnału.
Systemy i funkcje mechatroniczne - Podręcznik
133
Minos
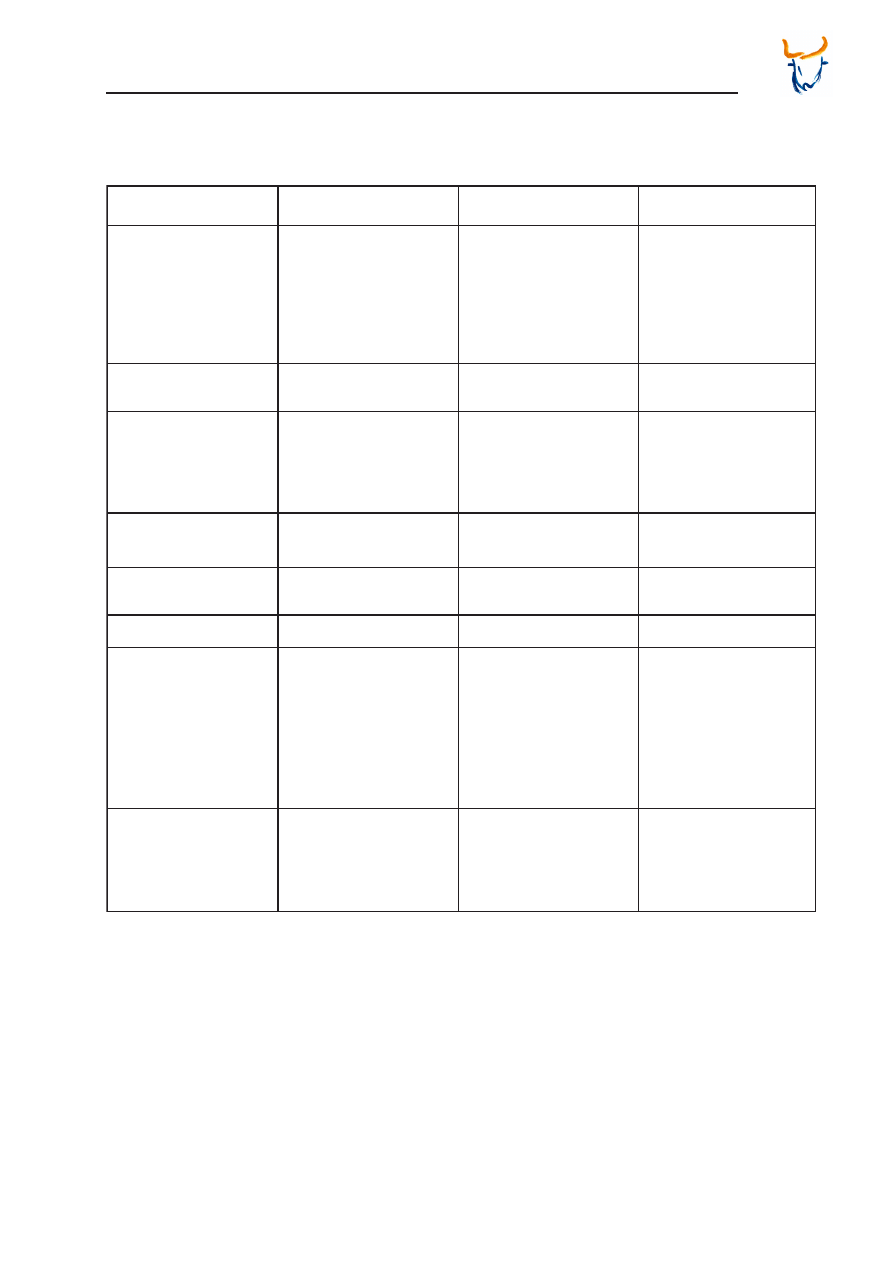
Elektrohydraulika
Elektropneumatyka
Elektrotechnika
Medium przenoszące
energię
mieszanina oleju
i wodnych płynów, oleje
mineralne, oleje
syntetyczne (bez
dodatku wody, niska
palność), bio-oleje
gazy (sprężone
powietrze jest
najtańszą i łatwo
dostępną mieszaniną
gazu)
Elektrony
Dostępność
dostępne
powietrze jest dostępne
bez ograniczeń
dostępne
Osiągane prędkości
wysoka, niższa niż
prędkości
w pneumatyce
bardzo wysoka
bardzo wysoka
Zdolności
akumulowania
możliwe, ze stratami
bardzo dobra
akumulacja
możliwe, jednak
z dużymi stratami
Transport
krótkie dystanse
możliwe dłuższe
odcinki
możliwe na długie
dystanse
Nadmierne obciążenie bezpieczne
bezpieczne
niebezpieczne
Narażenie zdrowia
nie ma, gdy przestrzega
się przepisów
bezpieczeństwa
nie ma
nie ma, gdy
przestrzega się
przepisów
bezpieczeństwa
dotyczących
obchodzenia się z
urządzeniami
elektrycznymi
Inne wymagania
separacja powietrza,
kawitacja, odporność na
niską temperaturę,
odporność na korozję
i abrazję
odporność na korozję
i abrazję
Tabela 8.3: Właściwości i wymagania mediów przenoszących energię
Tabela poniżej, pokazuje media przenoszące energię w elektrohydraulice,
elektropneumatyce i elektrotechnice:
Systemy i funkcje mechatroniczne - Podręcznik
134
Minos
Elektrohydraulika
Elektropneumatyka
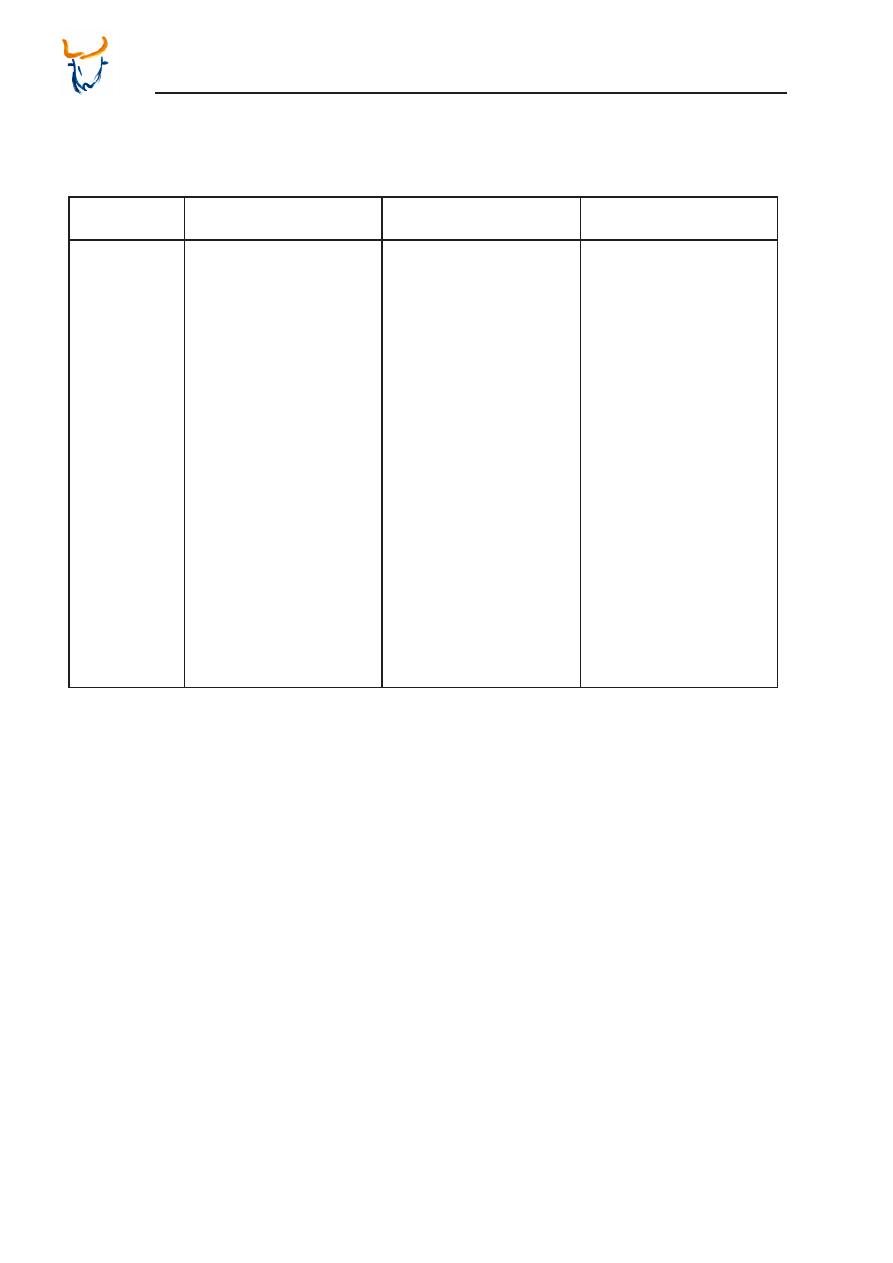
Elektrotechnika
Właściwości
materiałów
- możliwa mała gęstość
- mała ściśliwość
- lepkość nie powinna
być mała
(warstwy smarującej)
- odpowiednia zależność
lepkości od temperatury
- odpowiednia zależność
lepkości od ciśnienia
- odporność na
starzenie
- niska palność
- dobra kompatybilność
materiału
- dobra ściśliwość
(brak kohezji)
- zdolności akumulacyjne
(energia potencjalna)
- objętość zależna od
temperatury
- rozpuszczalny w
wodzie (zależność od
temperatury)
- niska lepkość
dynamiczna
- palny i nieodporny na
eksplozje
- bardzo mała gęstość
- środowiskowo
bezpieczny, bez
narażeń zdrowotnych
- równomierne rozłożenie
ciśnienia we wszystkich
kierunkach
- wysoka czystość
- transport na długie
dystanse możliwy
bez większych strat
- kosztowna
akumulacja
Tabela poniżej pokazuje właściwości fizyczne mediów przenoszących
energię w elektrohydraulice, elektropneumatyce i elektrotechnice.
Tabela 8.4: Właściwości materiałów mediów

Systemy i funkcje mechatroniczne - Podręcznik
135
Minos
8.3.2
Część napędowa
Następujący przykład zawiera porównanie wad i zalet liniowych i
obrotowych części napędowych w pneumatyce i hydraulice oraz
elektrotechnice, a także prezentuje ich główne obszary zastosowań.
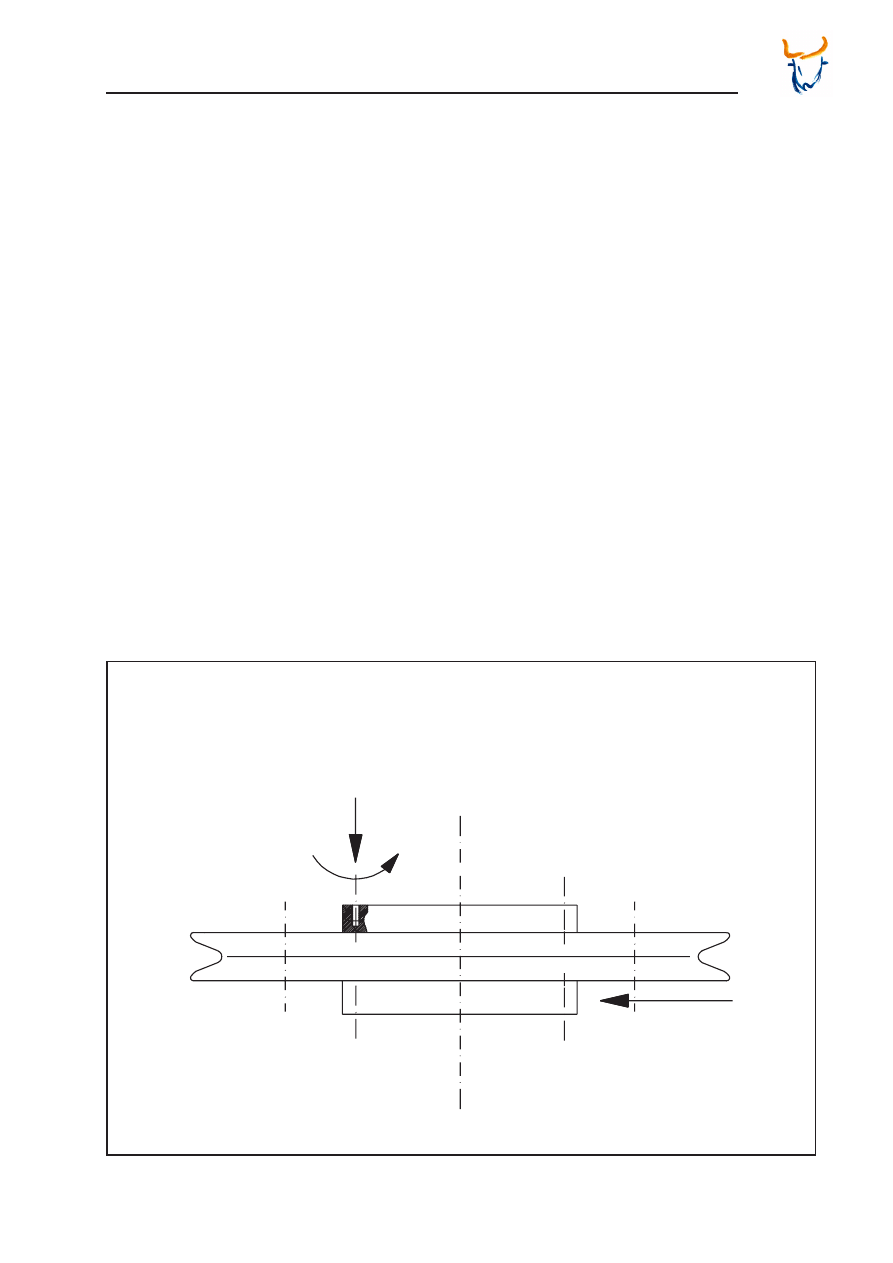
Obróbka tarczy bębna linowego
Cztery gwintowane otwory M12 powinny zostać wykonane w tarczy bębna
linowego. W tym celu, powinny zostać wywiercone otwory o średnicy 10,2
mm. Otwór prowdzący o średnicy 6 mm już istnieje.
Według obliczeń, obróbka wymaga siły skrawania 2500 N i siły posuwu
500 N na jeden wiercony otwór. Prędkość obrotowa wiertarki powinna
wynosić odpowiednio 750 obr/min i 1450 obr/min. Jak wynika z obliczeń,
maksymalna moc skrawania przy prędkości skrawania 0,5 m/s (750 obr/
min) wynosi 1,6 kW.
Aby zamocować bezpiecznie tarczę bębna linowego podczas wiercenia,
potrzebna jest siła 1000 N.
W przemyśle są dostępne instalacje ze sprężonym powietrzem o ciśnieniu
7 i 11 bar.
Następujący porządek działań powinien zostać zachowany:
1. zamocowanie tarczy bębna linowego,
2. szybki posuw wiertarki,
3. posuw roboczy wiertarki i wiercenie (ruch obrotowy).
Przykład

Systemy i funkcje mechatroniczne - Podręcznik
136
Minos
Poniższe wymagania powinny być spełnione.
Mocowanie:
-
powinna być zastosowana siła mocowania 1000 N,
-
możliwość monitorowania siły mocowania,
-
powinno być zapewnione bezpieczne mocowanie w wypadku braku
energii,
-
powinno być zapewnione szybkie zamocowanie i odmocowanie.
Napęd posuwu:
-
ruch liniowy,
-
odporność na przeciążenia,
-
możliwośc sterowania elektrycznego,
-
równa i niezależna od obciążenia prędkość podczas obróbki,
-
powinna być możliwa do osiągnięcia siła posuwu 2000 N,
-
wymagane jest szybkie przełączanie z ruchu szybkiego na
roboczy,
-
powinna być dostępna maksymalna prędkość posuwu 0,5 m/s.
Ruch roboczy wiertła:
-
ruch obrotowy,
-
prędkość obrotowa n = 750/1450 obrotów na minutę,
-
mała i odporna konstrukcja (brak przestrzeni), w strefie roboczej,
-
moc skrawania 1,6kW.
Metoda przedstawiania, symbole graficzne i plany
Symbole graficzne są często używane do graficznego, często
uproszczonego, przedstawienia urządzenia lub funkcji na schematach
obwodów i schematach funkcyjnych, diagramach, tabelach, rysunkach
cześci operacyjnych maszyny. Te same symbole mogą być użyte na
diagramach przepływu informacji, diagramach sekwencji programu i
schematach logicznych.
Norma DIN ISO 1219 zawiera koncepcje symboli graficznych
używanych w hydraulice i pneumatyce. Diagramy zawierają również plan
pozycjonowania jednostki, diagram funkcji i listę urządzeń.
Systemy i funkcje mechatroniczne - Podręcznik
137
Minos
Rys. 8.9:
Plan pozycjonowania elementu
Rozróżniamy:
-
plan pozycjonowania elementu,
-
plan sekwencji programu,
-
plan logiczny,
-
plan funkcji i sekwencji,
-
diagram funkcji (diagram pojedynczych kroków),
-
schemat obwodu.
Powinna zostać wybrana odpowiednia metoda według stopnia rozwoju
systemu sterowania.
Aby znaleźć najbardziej technicznie odpowiadające rozwiązanie,
potrzebny jest rysunek żądanej funkcji sterowania, używając planu
pozycjonowania elementu i listy wymagań.
Plan pozycjonowania elementu
Plan pozycjonowania elementu musi pokazywać pozycję elementów
napędzających w maszynie czy urządzeniu, oraz zawierać określone
informacje dotyczące rodzaju i umiejscowienia instalacji. Plan
pozycjonowania elementu musi być przejrzysty i zawierać tylko
najważniejsze informacje.
ruch posuwu
wiertła obrabiarki
ruch obrotowy
wiertła
obrabiarki
ruch mocujący
ruch mocujący
Systemy i funkcje mechatroniczne - Podręcznik
138
Minos
Wymagania
Elektrohydraulika
Elektropneumatyka
Elektrotechnika
Powinna być
zapewniona siła
mocowania 1000 N
XX
XX
XX
Zagwarantowane
monitorowanie
siły mocowania
XX
XX
XX
Szybkie zamocowanie
i odmocowanie
X
XX
XX
Zapewnione mocowanie
w przypadku odcięcia
energii
XX
XX
Koszty
niższe niż podczas
używania
elektromagnesu
niższe niż dla
elektromagnesu
i hydrauliki, ponieważ
energia pneumatyczna
jest już dostępna
wysokie
koszty, wymagany
sterownik o zmiennej
biegunowości
X
Tabela 8.5: Wymagania do mocowania tarczy bębna linowego
a) Mocowanie
Aby spełnić wymagania techniczne zadania, najpierw powinno
przygotować się listę możliwych rozwiązań problemu.
Poniższa tabela zawiera wybór odpowiednich urządzeń do mocowania
tarczy bębna linowego:
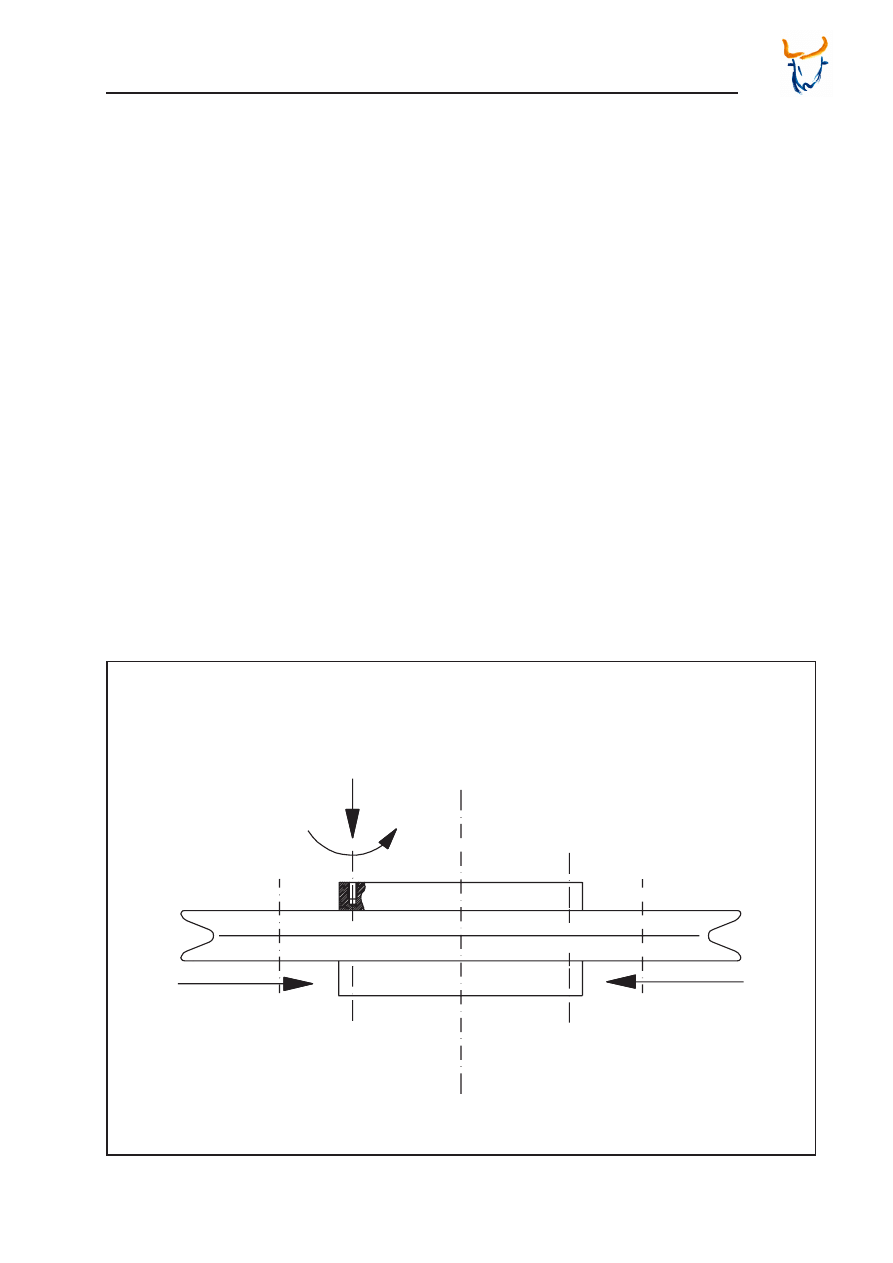
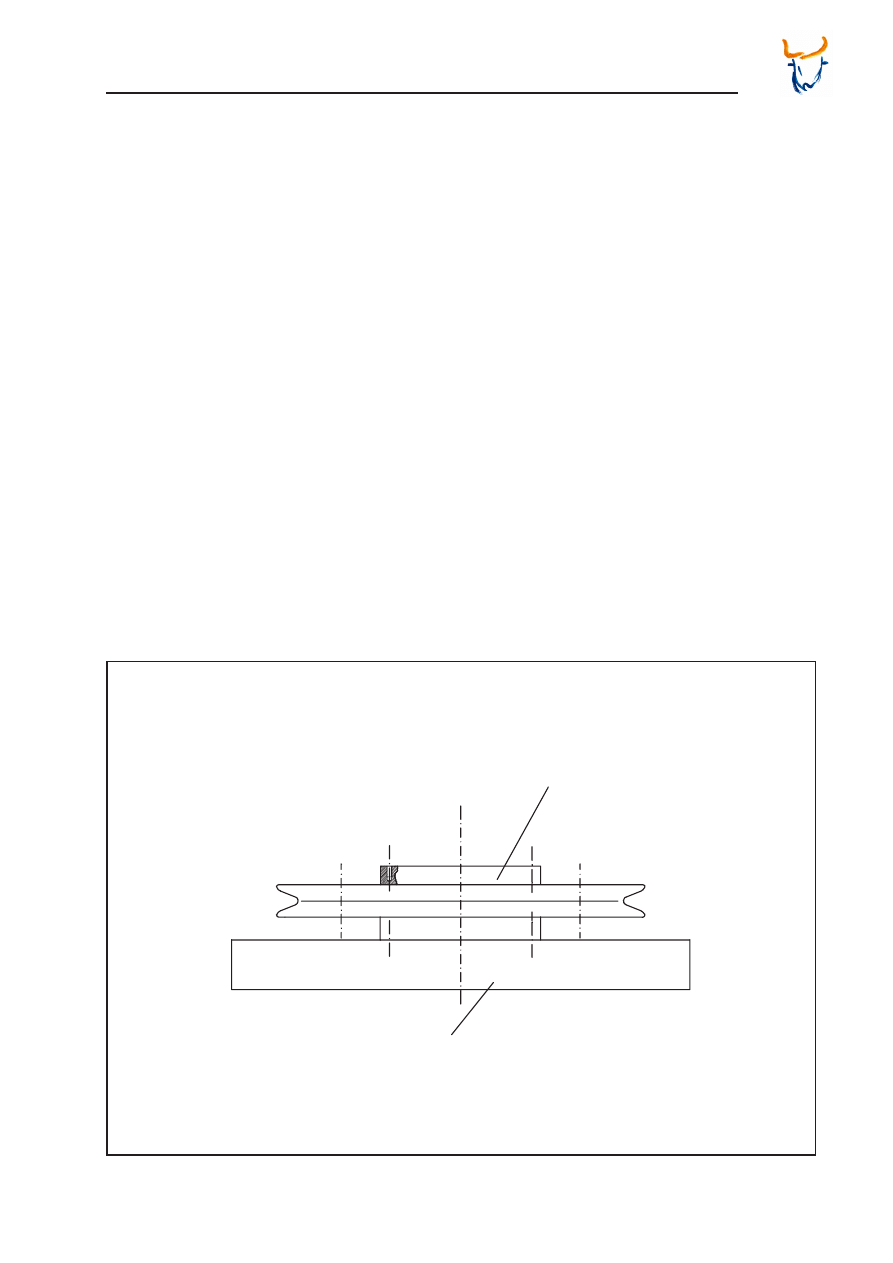
Mocowanie przy użyciu hydrauliki lub pneumatyki
Mocowanie przy użyciu hydrauliki lub pneumatyki może być łatwo
zrealizowane za pomocą siłowników. Rysunek prezentuje jedną z
możliwości mocowania przy użyciu siłownika hydraulicznego lub
pneumatycznego. Pod uwagę powinny być wzięte różne wartości sił
mocowania.
Siłownik pracuje używając dwóch szczęk mocujących, pracujących
na zasadzie dźwigni. Szczęki mocują element z dwóch stron. Nie jest
możliwe monitorowanie rozkładu sił w systemie dźwigni.
Obliczenia konstrukcji siłownika są podobne w hydraulice i
pneumatyce.
Wywoływana siła mocowania F
S
musi wynieść 1000 N. W tym wypadku,
wymagane ciśnienie w hydraulice wynosi 70 barów, podczas gdy
pneumatyce tylko 6 barów.
Systemy i funkcje mechatroniczne - Podręcznik
139
Minos
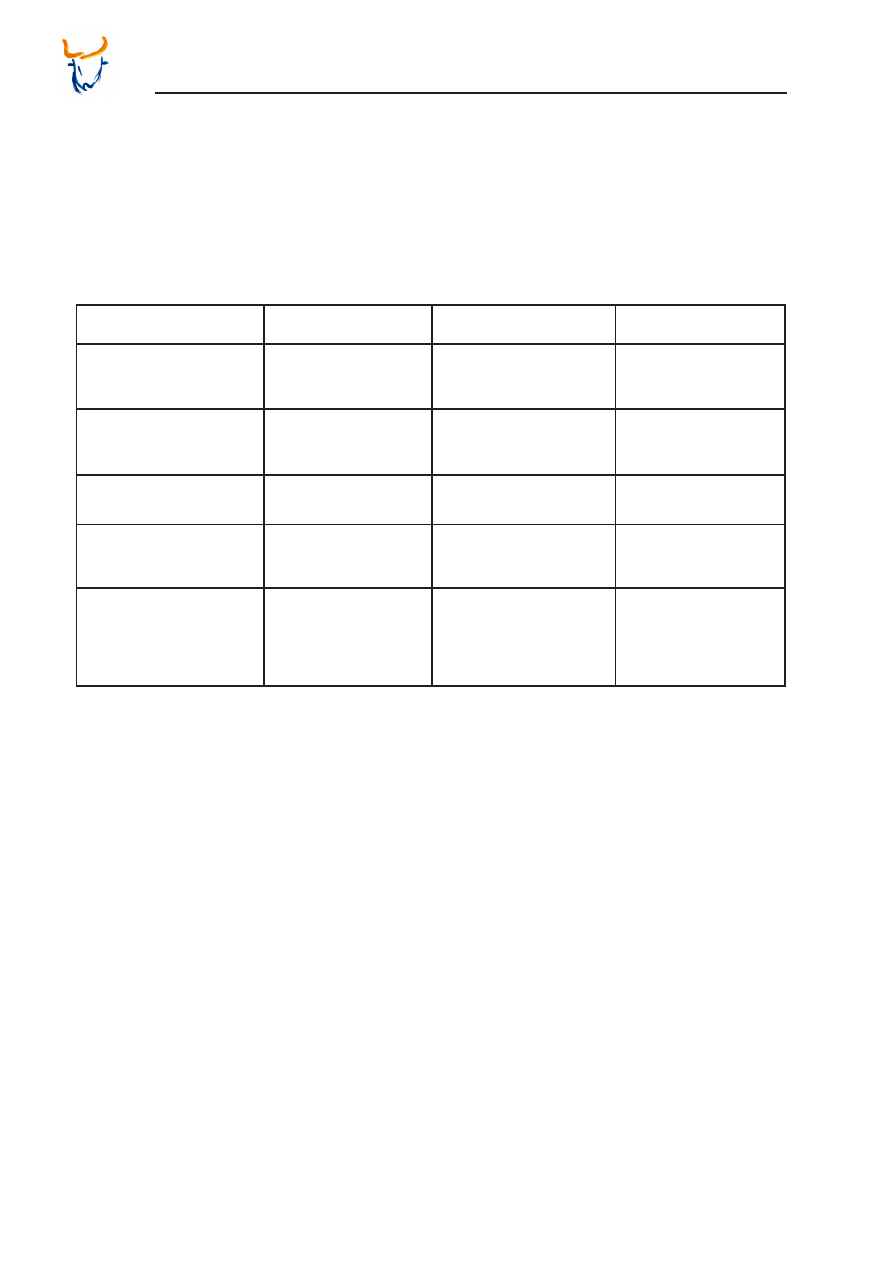
Rys. 8.10: Samocentrujące urządzenie mocujące dla pneumatyki lub hydrauliki
tarcza bębna linowego
Siłownik hydrauliczny:
p = F
s
/ A
A = F
s
/ p
A = 1000 N / 70 bar
A = 1,43 cm
2
W rezultacie średnica tłoka d = 13,5 mm. Typowe małe siłowniki
hydrauliczne mają średnicę tłoka 25 mm ze średnicą tłoczyska 12 mm.
Taka konstrukcja może być tu użyta.
Siłownik pneumatyczny:
A = F
s
/ p
A = 1000 N / 6 bar
A = 16,7 cm
2
Średnica tłoka tego siłownika ma 46,1 mm. Siłownik z tłokiem o średnicy
50 mm może tu być użyty. W wypadku możliwych spadków ciśnienia lub
oczekiwanego spadku współczynnika wydajności, następny większy
rozmiar powinien zostać użyty.
Systemy i funkcje mechatroniczne - Podręcznik
140
Minos
Rys. 8.11: Elektromagnes używany do mocowania przedmiotu obrabianego
Mocowanie przy pomocy elektromagnesów
Tarcza bębna linowego wykonana jest ze staliwa, tak więc elektryczne
mocowanie przy pomocy magnesu jest możliwe.
Cechy magnetycznych systemów mocujących:
-
duża precyzja,
-
minimalny czas przygotowawczy,
-
stała siła mocowaniana na całej powierzchni, co zapobiega
poruszeniu się elementu,
-
magnes nie nagrzewa się,
-
siła adhezji utrzymuje się nawet w wypadku zaniku prądu,
-
energooszczędne, pobieranie prądu trwa krótko, koszt połączenia
jest niski.
Jednakże, magnesy powinny być wyposażone w urządzenia sterujące
ze zmienną polaryzacją, które dopasowują wymaganą siłę mocowania.
Sprawiają również, że stały magnetyzm zostaje zredukowany poprzez
odwrócenie polaryzacji pola magnetycznego po wyłączeniu systemu
mocującego.
Systemy i funkcje mechatroniczne - Podręcznik
141
Minos
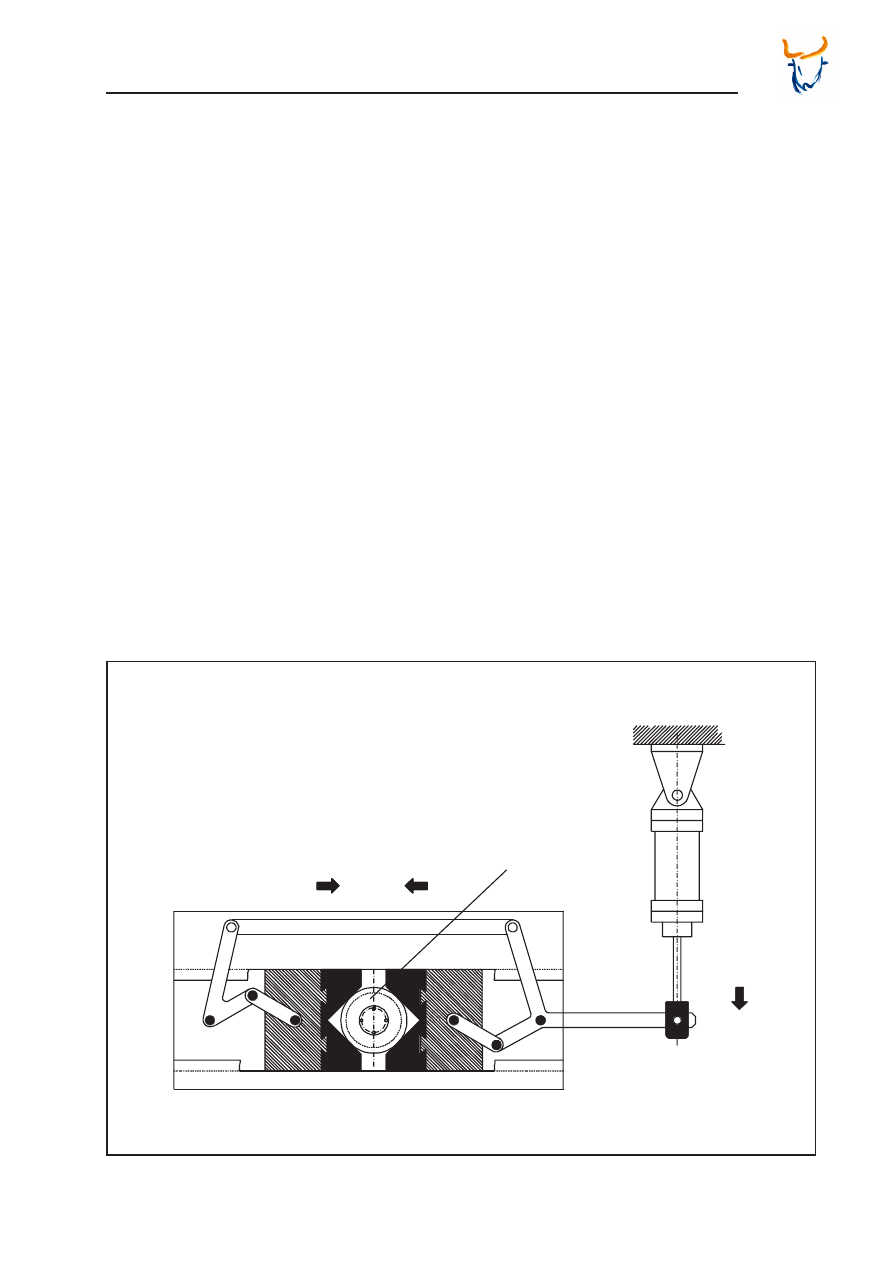
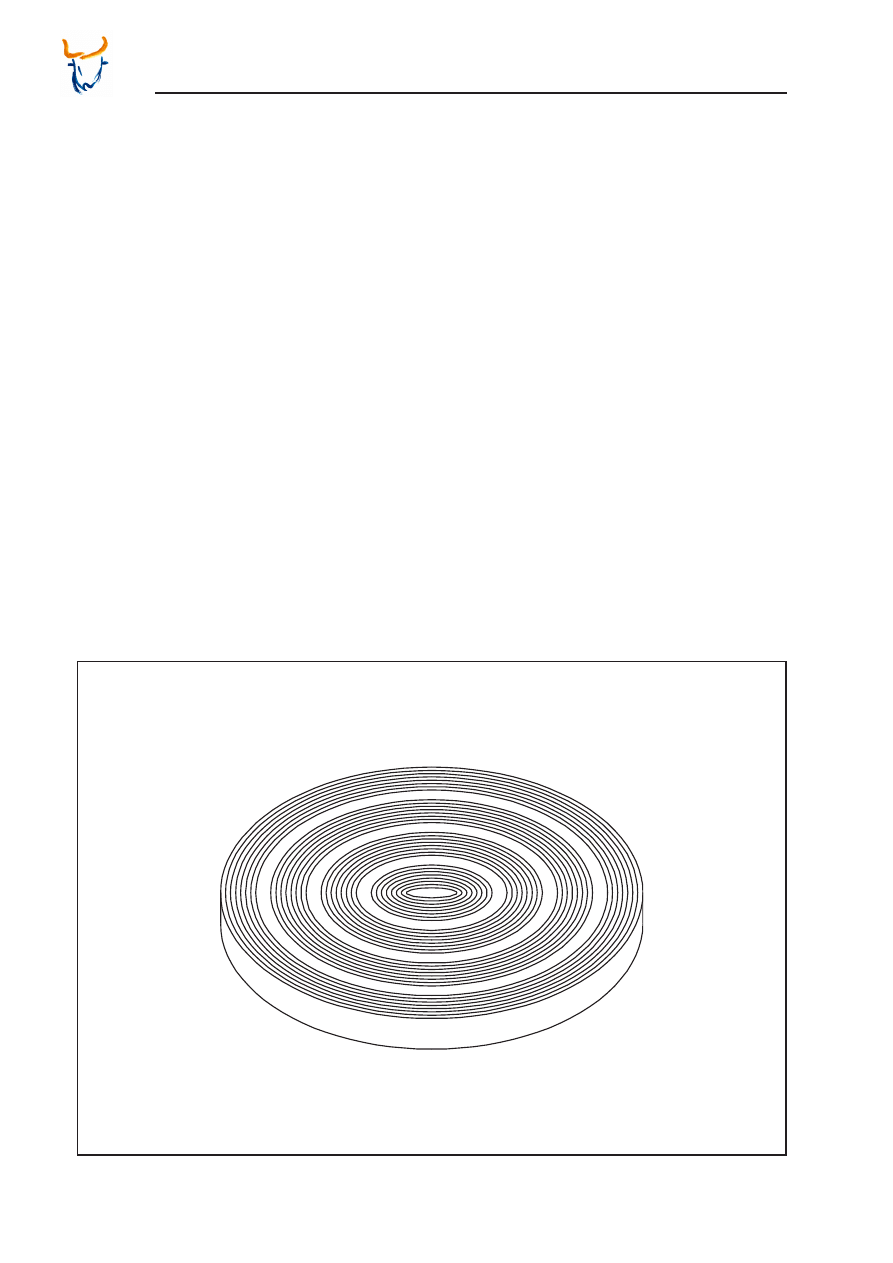
Rys. 8.12: Urządzenie mocujące z elektromagnesem
elektromagnes
tarcza bębna linowego
Istnieją różne konstrukcje magnetycznych systemów mocujących. W
konstrukcjach okrągłych powierzchnia może zawierać rowki centrujące,
które ułatwiają ustawienie przedmiotu obrabianego. Również otwory
centrujące mogą by użyte.
Cechy konstrukcji magnetycznego sytemu mocującego:
-
typowa siła przyciągania magnetycznego sytemu mocującego to
około 100N/cm
2
,
-
klasa zabezpieczenia IP 65,
-
obciążenie magnesu 100% cyklu roboczego.
System połączony jest z urządzeniem sterującym o zmiennej polaryzacji
przy następujących warunkach technicznych:
-
napięcie sieci elektrycznej 230 lub 380 V w zależności od wielkości
magnesu,
-
częstotliwość sieci elektrycznej 50 Hz, może być przełączona do
60 Hz,
-
możliwość podłączenia sterownika PLC używając napięcia
sygnałowego 24V,
-
namagnesowanie i odmagnesowanie wykonywane są poprzez
naciśnięcie przysicku lub wyłącznika,
-
możliwośc regulacji siły przyciągania.

Systemy i funkcje mechatroniczne - Podręcznik
142
Minos
Po przedstawieniu różnych urządzeń mocujących, możliwe jest
porównanie ich cech.
Mocowanie może odbyć się za pomocą:
-
siłowników hydraulicznych,
-
siłowników pneumatycznych,
-
elektromagnesów.
Wymienione powyżej trzy urządzenia napędzające spełniają techniczne
wymagania stawiane mocowaniom.
Zaletą elektromagnesów polega na prostej obsłudze bez dodatkowych
urządzeń do mocowania tarczy bębna linowego. Z drugiej strony, koszty
są stosunkowo wysokie, uwzględniając wymagane urządzenie sterujące
o zmiennej polaryzacji.
Zaletą siłownika pneumatycznego jest duża prędkość przy mocowaniu i
łatwy dostęp do sprężonego powietrza. Dlatego też koszty energii można
pominąć. Jednak jest to tylko możliwe, gdy sieć jest w stanie dostarczyć
wystarczająco dużo sprężonego powietrza do mocowania.
Zaletą siłownika hydraulicznego jest zgodność ze stawianymi
wymaganiami. Jednak, siłownik pneumatyczny jest używany raczej dla
niskich sił mocowania, około 1000 N, z powodu wysokich kosztów zakupu
i utrzymania urządzenia hydraulicznego.
Budowa urządzenia mocującego może przemawiać przeciwko użyciu
siłowników pneumatycznych i hydraulicznych.
Porównianie pokazuje, że istnieje wiele możliwości zrealizowania funkcji
mocującej. Każda ma wady i zalety. Czasem nawet kilka rozwiązań może
spełnić postawione wymagania.
W poprzednim przykładzie założono dostęp do sprężonego powietrza.
Dlatego, siłownik pneumatyczny powinien zostać wybrany do procesu
mocowania.
Systemy i funkcje mechatroniczne - Podręcznik
143
Minos
b) Napęd posuwu
Napęd posuwu powinien zostać dobrany do wiercenia otworów pod
gwint M12.
Proces wyboru odpowiednich urządzeń do napędu posuwu znajduje się
w poniższej tabeli:
Analiza tego porównania pokazuje, że liniowe napędy hydrauliczne są
najbardziej odpowiednie by je użyć jako napędy posuwu.
Ciągłe ulepszanie liniowych elektrycznych napędów pozwoli w przyszłości
używać ich jako napędy posuwu.
Liniowe elektryczne napędy o wysokiej prędkości mogą być używane
w obróbce metali lekkich. W tej dziedzinie rywalizują z napędami
hydraulicznymi, które nie osiągaja prędkości do 4 m/s.
Jednakże w poprzednim przykładzie powininen być użyty siłownik,
ponieważ wtedy zgodne jest to z wymaganiami.
Wymagania
Elektrohydraulika
Elektropneumatyka
Elektrotechnika
Ruch translacyjny
XX
XX
XX
Odporność na
przeciążenia
XX
XX
Sterowalność
elektryczna
XX
XX
XX
Siła posuwu
F = 2000 N
XX
-
Maksymalna prędkość
posuwu v = 0.5 m/s
XX
X
Realizacja ruchów
szybkich i roboczych
XX
łatwo osiągalne
trudno
Płynność ruchu
XX
X
-
-
X
X
X
Tabela 8.6: Wymagania napędu posuwu

Systemy i funkcje mechatroniczne - Podręcznik
144
Minos
Obliczenia parametrów konstrukcji siłownika hydraulicznego są podobne
do obliczeń siłownika użytego do mocowania przedmiotu obrabianego.
Tutaj, czynnik wydajności napędu będzie wzięty pod uwagę.
Wymagana siła mocowania F
V
wynosi 2000 N. Oczekiwane ciśnienie
hydrauliczne to 70 barów. Powinno sprawdzić się czy ciśnienie 160 barów
mogłoby być użyte.
Siłownik hydrauliczny z ciśnieniem 70 barów:
p = F
v
/ A
A = F
v
/ p
A = 2000 N / 70 bar
A = 2,86 cm
2
Średnica wynikowa tłoka d = 19,1 mm. Typowe małe siłowniki hydrauliczne
mają średnicę tłoka 25 mm ze średnicą tłoczyska 12 mm. Taka konstrukcja
może być tu użyta. Nie ma potrzeby podnoszenia ciśnienia do 160
barów.
Systemy i funkcje mechatroniczne - Podręcznik
145
Minos
c) Napęd wiercenia
Odpowiedni napęd musi zostać dobrany do wiercenia. Następujące silniki
mogą być właściwe dla ruchu obrotowego:
-
silniki na sprężone powietrze,
-
silniki hydrauliczne,
-
silniki elektryczne.
Poniższa tabela pokazuje procedurę selekcji odpowiednich napędów do
wiercenia:
Wymagania
Elektrohydraulika
l
Elektropneumatyka
Elektrotechnika
Ruch obrotowy
XX
XX
XX
Prędkość obrotowa
wiertła dostosowywana
do
n
1
= 750 r/min i
n
2
= 1450 r/min
Momenty obrotowe
M
1
= 10 Nm
i M
2
= 20 Nm
patrz diagram
patrz diagram
patrz diagram
Moc skrawania
P = 1,6 kW
X
patrz obliczenia
X
patrz obliczenia
X
patrz obliczenia
Małe urządzenie
mocujące w strefie
roboczej
XX
XX
Bezpieczeństwo
nadmiernego
obciążenia
XX
XX
możliwe z kontrolą
zaworu dopływu
Tylko z odpowiednim
sprzętem ochronnym
możliwe z przekładnią
możliwe z przekładnią
możliwe ale zależne
od obciążenia
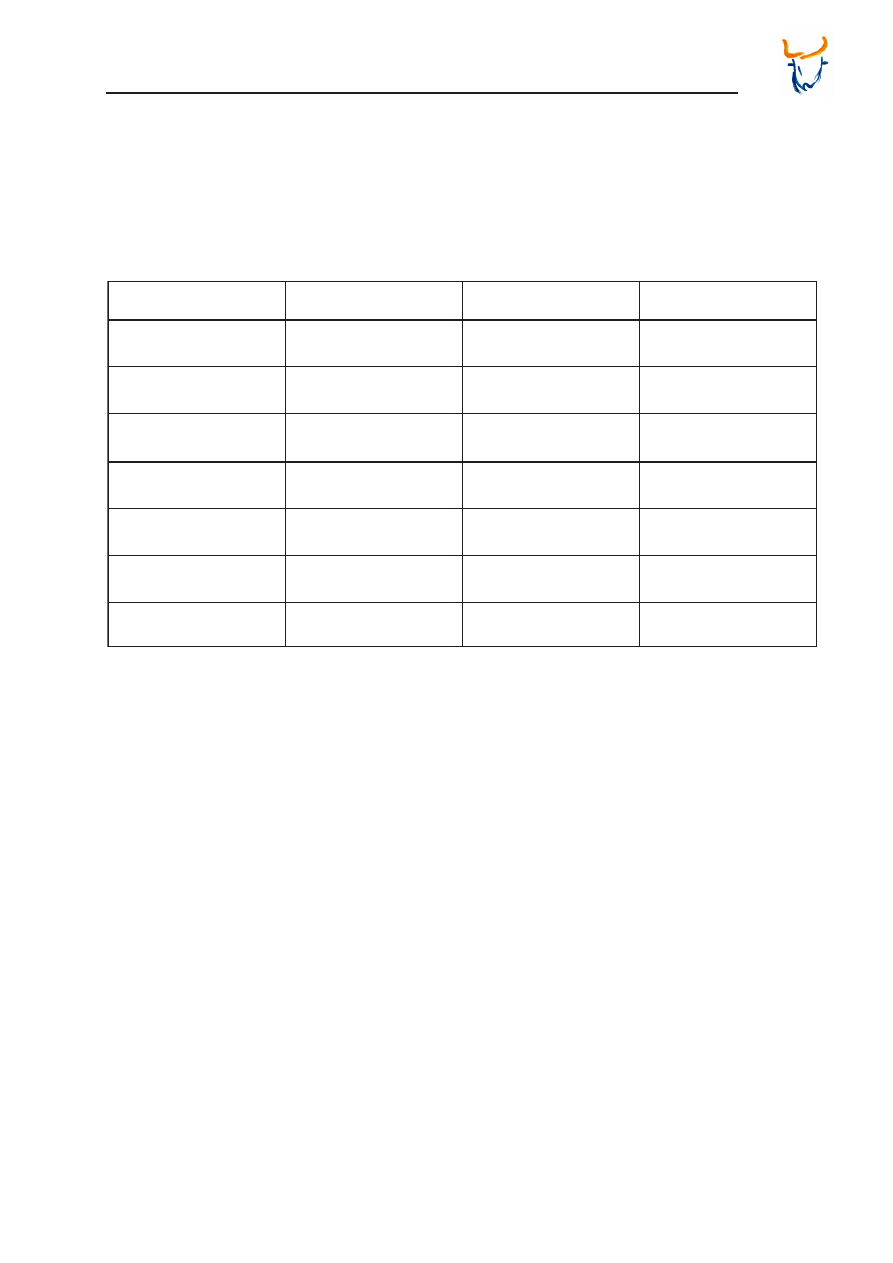
Tabela 8.7: Wymagania napędu do wiercenia
Aby wybrać najbardziej odpowiedni rodzaj napędu do wiercenia, należy
porównać cechy różnych elementów obrotowych.
Systemy i funkcje mechatroniczne - Podręcznik
146
Minos
Rys. 8.13: Klasyfikacja silników hydraulicznych według prędkości obrotowej
zakres prędkości obrotowej n
min
-1
4000
750
1450
7
silniki
wolnoobrotowe
silniki
o średnich
obrotach
50
5
6
4
3
2
1
0 10
500
100
1000
silniki wysokoobrotowe
2000
3000
Silniki hydrauliczne można testować według różnych kryteriów.
Klasyfikując silniki hydrauliczne według prędkości obrotowej, wyróżnić
można trzy główne kategorie:
silniki wolnoobrotowe, silniki o średnich obrotach i silniki wysokoobrotowe.
Silniki wolnobieżne wytwarzają moment obrotowy o wysokiej wartości
nawet przy niskiej prędkości obrotowej, bez podłączania dodatkowego
napędu. Tego nie wymaga nasz przykład.
Następujące silniki hydrauliczne są przedstawione na wykresie
poniżej:
1 osiowy silnik tłokowy z prostą osią główną,
2 osiowy silnik tłokowy z łamaną osią główną,
3 promieniowy silnik tłokowy z wewnętrznym przesunięciem,
4 promieniowy silnik tłokowy z zewnętrznym przesunięciem,
5 silnik przekładniowy,
6 silnik łopatkowy,
7 silnik gerotorowy.
Wymagana prędkość obrotowa waha się od średniej po wysoką. Dla niej,
silniki 1, 2, 3, 5 i 6 są odpowiednie. Promieniowe silniki z wewnętrznym
przesunięciem i silniki gerotorowe nie są odpowiednie.
Systemy i funkcje mechatroniczne - Podręcznik
147
Minos
Rys. 8.14: Klasyfikacja silników hydraulicznych według momentu obrotowego
20 000
7
5
6
10 - 20 Nm
nominalny moment obrotowy M
n
1000
1
3
4
2
500
0 100
Nm
5 000 10 000
50 000
30 000 40 000
Poniższy wykres prezentuje klasyfikację silników hydraulicznych według
wartości momentu obrotowego. Numery oznaczają takie same rodzaje
silników jak w wykresie klasyfikacji prędkości obrotowej.
Dla wartości momentu obrotowego między 10-20 Nm tylko silniki
przekładniowe i łopatkowe sa odpowiednie. Przydatność tych silników
będzie sprawdzona w naszym przykładzie.
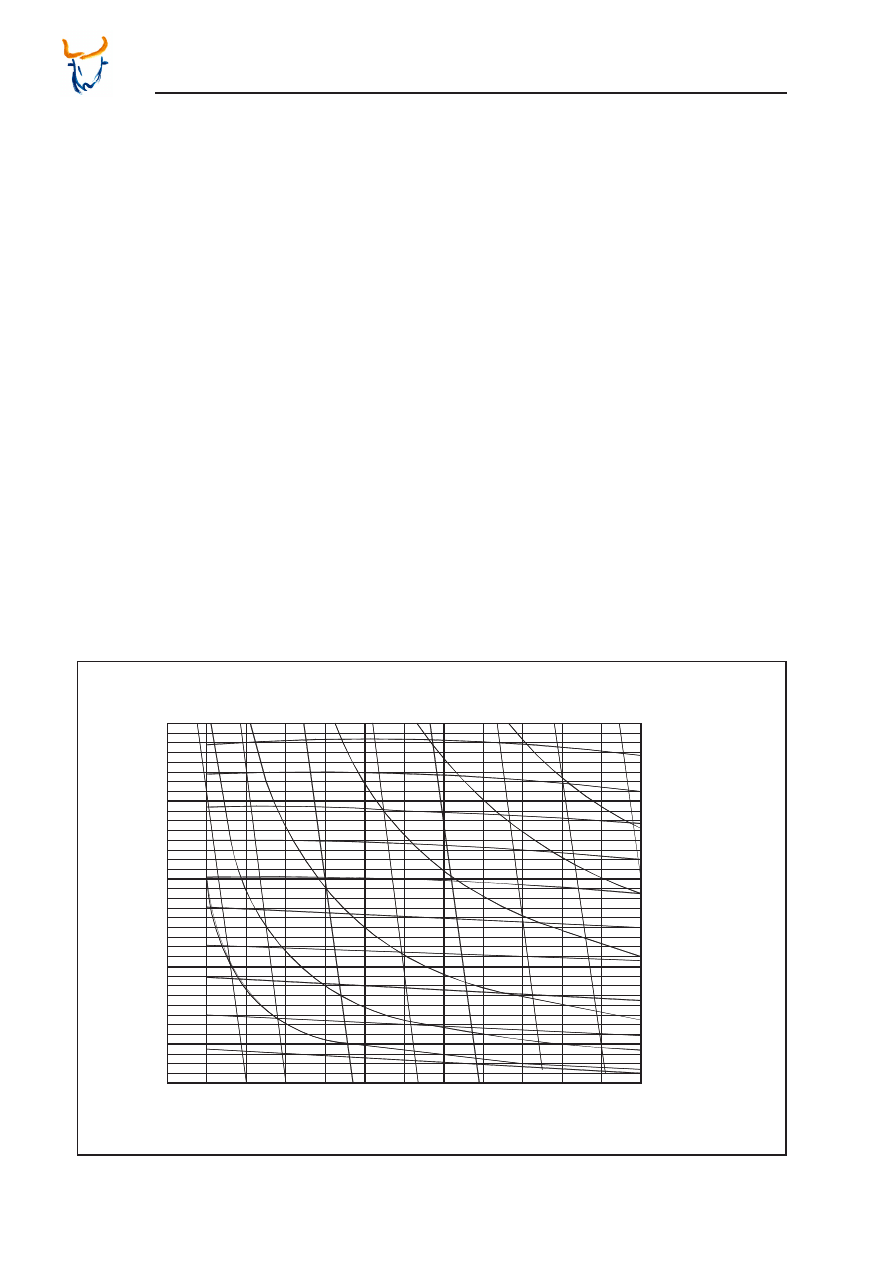
Wybrany został silnik przekładniowy 2kW; reprezentatywne dla tego
silnika charakterystyki są przedstawione na dalszym wykresie.
Następujące wartości odnoszą się do każdego przypadku pracy:
prędkość obrotowa: 750 U/min
moment obrotowy: 20 Nm
ciśnienie: 120 bar
przepływ objętościowy: 10 l/min
prędkość obrotowa: 1450 U/min
moment obrotowy: 10 Nm
ciśnienie: 60 bar
przepływ objętościowy: 20 l/min
Systemy i funkcje mechatroniczne - Podręcznik
148
Minos
Rys. 8.15: Charakterystyki silnika przekładniowego
20
35
MPa
20
M
ab
Nm
6,5
10
15
20
25
30
dm
3
/min
40
1 500
16
∆
p = const.
5
0
500
1 000
15
10
20
25
2 500
2 000
n
ab
3 000
min
-1
2
4
10
6
8
12
14
35
18
Aby załączyć silnik przekładniowy potrzebny jest zawór kontroli ciśnienia
by móc nastawić dowolną wartość ciśnienia. Aby dostosować wartości
przepływu objętościowego, zawory kontroli są używane. Wydatki na
powstały obwód są bardzo wysokie.
Można również użyć proporcjonalny zawór kontroli ciśnienia zamiast
zaworów kontroli ciśnienia oraz proporcjonalny rozdzielacz zamiast
zaworów kontroli przepływu. Jest to dobre rozwiązanie, jednak z
powodu powiązania ze sterowaniem elektronicznym jest ono droższe
niż poprzednie.
Inną opcją jest użycie silnika łopatkowego. Ten typ silnika może być
używany jako regulowany lub nieregulowany silnik hydrauliczny.
Jednak, ten typ silnika jest zazwyczaj produkowany ze stałą chłonnością
i bardzo rzadko ze zmienną chłonnością. Jest odpowiedni dla wysokich
wartości momentu obrotowego.
Te napędy mogą zostać użyte w naszym przykładzie, jednak koszty
realizacji będą wysokie.
Systemy i funkcje mechatroniczne - Podręcznik
149
Minos
Silniki pneumatyczne mogą również wytwarzać ruch obrotowy.
Silniki pneumatyczne to:
-
promieniowe silniki tłokowe,
-
osiowe silniki tłokowe,
-
silniki tarczowe.
Z silników na sprężone powietrze, silniki tarczowe najlepiej spełniają
wymagania przykładu. Te silniki osiągają moc od 0,1 do 15 kW. Prędkość
obrotowa silnika bez obciążenia mieści się w przedziale 1000 – 50 000
obr/min.
Dla naszego przykładu wybieramy silnik na sprężone powietrze o
konstrukcji tarczowej.
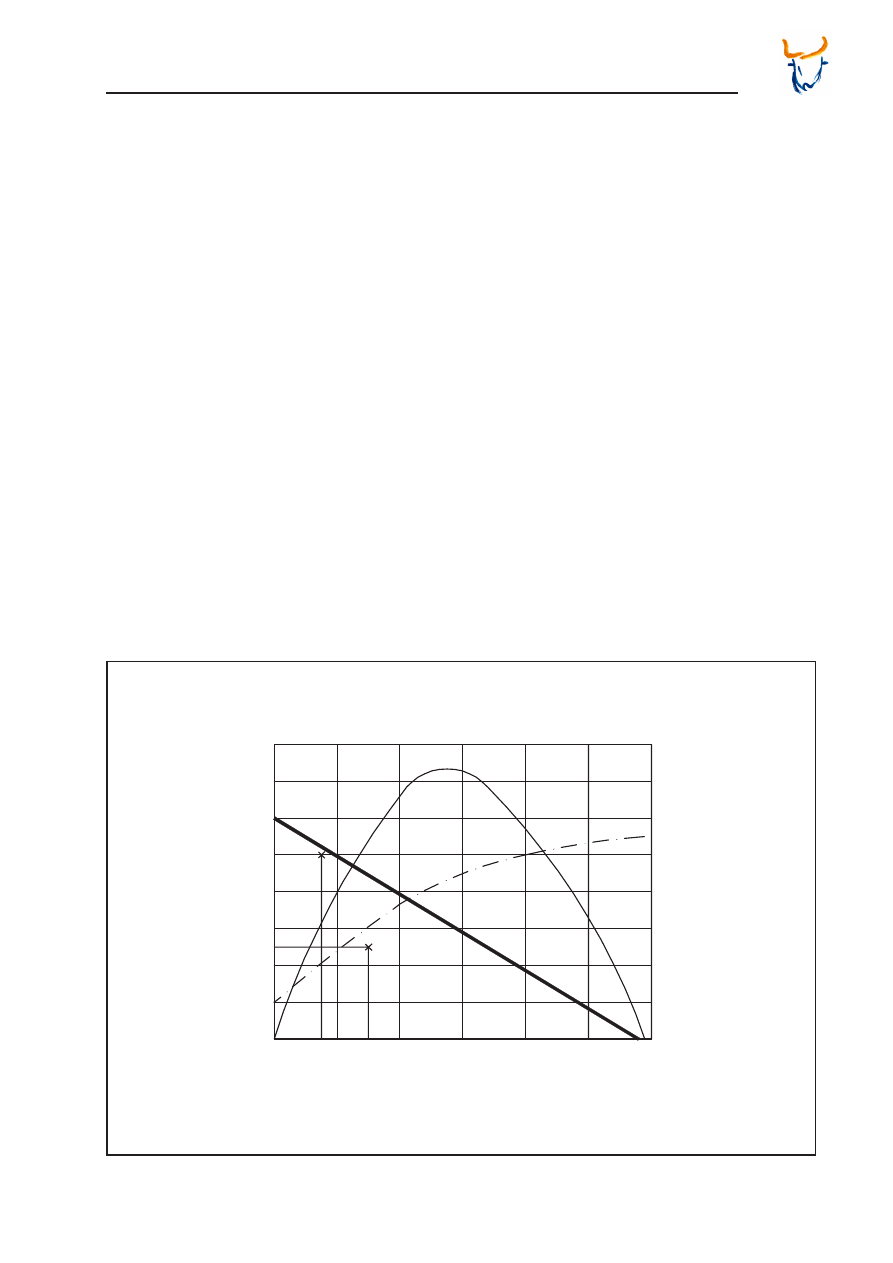
Rys. 8.16: Wykres mocy przy nadciśnieniu roboczym 6,3 barów
24
28
Nm
3.0
3.5
kW
120
140
l/s
6000
0.5
1.0
1.5
2.0
2.5
0
4
8
12
16
20
2000
4000
750 1450
10
20
40
60
80
100
U/min
Systemy i funkcje mechatroniczne - Podręcznik
150
Minos
Rys. 8.17: Zakres roboczy silników na sprężone powietrze
Silnik ze sprężonym powietrzem to jeden z najbardziej niezawodnych i
wielozadaniowych napędów. Może być regulowany w bardzo szerokim
zakresie.
Moc może zostać łatwo zmieniona poprzez prostą regulację napływającego
powietrza przy użyciu zaworu dławiącego lub zaworu kontroli ciśnienia.
Funkcjonowanie silnika ze sprężonym powietrzem jest niezawodne, tak
jak na wykresie poniżej - do przerywanej linii.
Dla przykładu można użyć dwa osobno złączone zawory dławiące lub
jeden zawór kontoli ciśnienia i jeden zawór dławiący, natomiast dla drugiej
prędkości obrotowej zawór dławiący powinien być podłączony osobno.
Lepszym rozwiązaniem jest połączenie silnika tarczowego na sprężone
powietrze, z przekładnią.
20
50
10
30
100
100 %
moment
obrotowy n
i
prędkość obrotowa n
i
%
Systemy i funkcje mechatroniczne - Podręcznik
151
Minos
Silnik elektryczny to trzecia możliwość napędu do wiercenia.
Aby zrealizować dwie prędkości obrotowe, silnik o zmiennej polaryzacji z
połączonym uzwojeniem może być użyty. Jednakże ten silnik jest bardzo
drogi oraz dużych rozmiarów.
Dlatego też lepiej byłoby użyć trójfazowego silnika asynchronicznego
z przekładnią by zrealizować cel i obie prędkości obrotowe. Jest to
najlepsze rozwiązanie dla naszego przykładu.
Po analizie trzech różnych rodzajów napędów, nadszedł czas na wnioski
z porównania.
Najbardziej odpowiednim napędem jest elektryczny silnik asynchroniczny.
Powinien być wyposażony w przekładnię, aby zrealizować obie
prędkości obrotowe. Główny napęd musi działać na kilku dostosowanych
prędkościach obrotowych, dlatego wielostopniowa przekładnia powinna
być zastosowana.
Realizowanie wielu różnych prędkości obrotowych jest możliwe przy
użyciu uprzednio podłączonej przekładni. Jeśli tylko dwie wartości
prędkości są potrzebne, silnik ze zmienną polaryzacją może zostać
użyty. Silnik ten jest większy i droższy od asynchronicznego silnika z
przekładnią.
W dziedzinie mechatroniki ograniczenia między pojedynczymi postaciami
mocy nie istnieją.
Aby uzyskać optymalne zużycie różnych postaci energii, różne kombinacje
tych form są używane. Na przykład, systemy elektrohydrauliczne i
elektropneumatyczne są często używane.
W jednostce posuwu wiercenia, hydrauliczny napęd liniowy może
być połączony z tarczowym silnikiem na sprężone powietrze poprzez
przekładnię obiegową. W tym wypadku mamy połączenie hydrauliki,
pneumatyki z mechaniką jak również elektrotechniką, użytych do celów
sterowania.
Systemy i funkcje mechatroniczne - Podręcznik
152
Minos
8.3.3
Elementy sygnałowe, sterujące i wykonawcze
System sterowania jest podzielony na część zasilania i sygnałową.
Część zasilania zawiera część napędową, sekcję kontroli energii
(elementy uruchamiające i sterujące), oraz część dopływu energii.
Część sygnałowa zawiera bloki funkcyjne sygnału wejściowego,
przetwarzanie sygnału i sygnał wyjściowy. Właściwa funkcja sterowania
jest realizowana poprzez przetwarzanie sygnałów i informacji.
Celem systemu sterowania jest odebranie jednego lub więcej sygnałów,
aby ocenić informację według danego programu i wytworzyć sygnały
wyjściowe.
Wybór elementów napędu do sekcji napędowej został już dokonany.
Siłownik pneumatyczny jest używany do mocowania, natomiast siłownik
hydrauliczny do posuwu. Napęd obrotowy jest realizowany przy pomocy
silnika elektrycznego. Każde źródło energii powinno być niezawodnie
kontrolowane. Dokonuje się tego w części kontoli energii poprzez
elementy wykonawcze i kontrolne.
Elementy wykonawcze wymagane są do działania elementów
napędowych. Celem tych elementów jest wpływ na kierunek przepływu
pneumatycznego lub hydraulicznego medium przenoszącego energię.
Oba siłowniki działające obustronnie muszą być sterowane przy pomocy
rozdzielaczy. W pneumatyce rozdzielacze typu 5/2 są wykorzystywane,
gdy nie jest wymagane środkowe położenie blokujące.
Napęd hydrauliczny potrzebny jest do zrealizowania napędu posuwu.
Rozdzielacz typu 4/3 użyty jest do uruchomienia hydraulicznego siłownika
dwustronnego działania.
Sterowanie silnikiem elektrycznym jest realizowane poprzez styczniki i
przekaźniki.
Właściwy dobór typu i przeznaczenia zaworów oraz przekaźników jest
możliwy dopiero po powstaniu diagramu względnych połączeń.
Systemy i funkcje mechatroniczne - Podręcznik
153
Minos
Część kontroli sygnału zawiera urządzenia do doprowadzania i
przekazywania sygnałów, takie jak:
-
urządzenia sterujące (styki elektryczne normalnie otwarte,
normalnie zamknięte i przełączające, pneumatycznie zasilane
rozdzielacze 3/2 jako elementy sygnalizujące),
-
czujniki (wyłącznik zbliżeniowy),
-
przetwornik wejściowy (hydrauliczne i pneumatyczne wyłączniki
ciśnieniowe),
-
wskaźniki prądu (optyczne, akustyczne).
Przetwarzanie sygnału jest właściwym procesem sterowania. Składa
się na nie oprogramowanie, które określa funkcjonowanie złożonego
sterowania.
Wszystkie systemy sterowania można programować. Dotyczy to sterowań
programowanych sprzętowo oraz sterowników PLC.
Sterowania programowane konstrukcyjnie (HWC) posiadają następujące
zalety:
-
odporne,
-
niepodatne na wstrząsy,
-
rozpowszechnione i dobrze poznane,
-
niezawodne,
-
tanie, dla małych systemów,
-
do 8 przekaźników, równie opłacalne, co sterownik PLC.
Z drugiej strony, sterowanie HWC ma wady takie jak:
-
wymóg dużej przestrzeni,
-
tylko funkcje binarne mogą być przetwarzane,
-
program jest stały; zmiany możliwe są tylko przy użyciu nowego
okablowania lub zmodyfikowaniu istniejącego,
-
wysokie koszty produkcji i rozwoju,
-
intensywna konserwacja konieczna z powodu szybkiej abrazji,
-
wyższe koszty przy bardziej rozbudowanych programach.
Programowane sterowniki logiczne (PLC) posiadają następujące
zalety:
-
łatwo wymienić je przy użyciu techniki wsuwania(ang. slide-in),
-
duża niezawodność dzięki elementom bezkontaktowym,
-
program sterownika może być szybko zmodyfikowany,
-
mało wymaganej przestrzeni,
-
możliwe tworzenie dokumentacji,
-
możliwe testowanie programu,
-
możliwe monitorowanie sekwencji sterowania.
Jednak, sterownik PLC posiada również wady:
-
wysokie koszty uruchomienia,
-
drogie wymagane urządzenia programujące.

Systemy i funkcje mechatroniczne - Podręcznik
154
Minos
Dobór elementów sterujących dokonywany jest po wykonaniu schematu
połączeń i związanej z tym dokumentacji.
Następujące funkcje można wymienić:
-
elementy sterowania wykorzystywane do blokowania pewnych
kierunków,
-
elementy sterowania, które wpływają na przepływ objętościowy,
-
zawory kontroli ciśnienia oraz warystory (elektryczne elementy
zabezpieczające).
Elementy sygnalizujące rozpoznają ruch mechaniczny
elementów napędowych i przetwarzają go w sygnały, które
mogą być przetworzone przez system sterowania. Sygnały
mechaniczne są często przekształcane w sygnały elektryczne.
Różne elementy sygnalizujące posiadają poniższe cechy:
Mechaniczne wyłączniki położeniowe:
-
dokładność punktu styku do 0,001 mm,
-
trwałość: 10 milionów cykli,
-
praca kontaktowa, co powoduje abrazję.
Kontaktronowe wyłączniki zbliżeniowe:
-
dokładność styku: ± 0,1 mm,
-
trwałość: 5 milionów cykli,
-
typowy przełącznik dla siłowników,
-
stały magnes powoduje przełączenie przy zbliżeniu.
Indukcyjne wyłączniki zbliżeniowe:
-
tylko materiały przewodzące prąd mogą być wykryte,
-
zakres działania: zazwyczaj 0,8 -10 mm, maksymalnie do 250
mm,
-
tańsze niż pojemnościowe wyłączniki zbliżeniowe,
-
działanie bezstykowe.
Pojemnościowe wyłączniki zbliżeniowe:
- odpowiednie dla wszystkich materiałów ze stałą dielektryczną
>1,
-
zakres działania: zazwyczaj 5 ... 20 mm, maksymalnie do 60
mm,
-
działanie bezstykowe.

Systemy i funkcje mechatroniczne - Podręcznik
155
Minos
Przede wszystkim, każdy z napędów w przykładzie powinien być
rozważony osobno. Pneumatyczny siłownik mocujący jest uruchamiany
poprzez ręcznie obsługiwany rozdzielacz. Nie ma potrzeby używania
wyłącznika krańcowego, ponieważ operator załączy posuw tylko wtedy,
gdy proces mocowania się zakończy.
Kontrola ciśnienia mocowania odbywa się poprzez zawór przelewowy,
który zadziała tylko, gdy ciśnienie wzrośnie do odpowiedniej wartości.
Hydrauliczny siłownik roboczy do posuwu jest uruchamiany przez ręcznie
obsługiwany rozdzielacz. Tak jak w przypadku siłownika mocowania, nie
ma potrzeby użycia wyłączników krańcowych.
Przełączanie posuwu na roboczy odbywa się za pomocą rozdzielacza,
który posiada rolkę uruchamianą przez siłownik podczas wysuwu.
Napęd elektryczny dla wiertła jest włączany i wyłączany poprzez przyciski
lub wyłączniki.
Cały proces musi być połączony w złożony system. Dlatego też część
sygnałowa powinna być wyposażona w sterownik PLC.
Sygnały wejściowej sterownika PLC powinny być generowane przez
wyłączniki zbliżeniowe i elektryczne. Jeden z sygnałów wejściowych
wytwarzany jest przez czujnik ciśnienia, który kontroluje ciśnienie
mocowania.
Sygnały wyjściowe sterownika PLC używane są do zasilania
elektromagnesów zaworów oraz do przełącznia przekaźników napędu
elektrycznego.

Systemy i funkcje mechatroniczne - Podręcznik
156
Minos
Następujące czujniki zostały wybrane do przykładu:
Kontaktronowe wyłączniki zbliżeniowe są używane w pneumatycznych
siłownikach. Następujące fakty przemawiają za kontaktronowymi
wyłącznikami zbliżeniowymi:
-
typowe użycie do sygnalizacji krańcowej pozycji siłownika,
-
najczęściej używany wyłącznik do wskazywania krańcowej pozycji
siłownika,
-
bezpieczny i niezawodny,
-
łatwo łączy się z systemem sterowania,
-
niezawodnie spełnia wymagania systemu.
Hydrauliczny siłownik wymaga dodatkowo oprócz wyłączników
krańcowych, trzeciego wyłącznika by zmienić posuw z szybkiego na
roboczy. W tych trzech przypadkach zastosowane zostały indukcyjne
czujniki zbliżeniowe.
Indukcyjne wyłączniki zbliżeniowe spełniają następujące wymagania:
-
użycie kontaktronowych wyłączników jest niemożliwe z powodu
stalowego cylindra siłownika, co znacznie osłabia pole magnetyczne,
-
odpowiednie do skanowania końcowych pozycji siłownika,
-
bezpieczne i niezawodne,
-
tańsze niż pojemnościowe wyłączniki zbliżeniowe.

Systemy i funkcje mechatroniczne - Podręcznik
157
Minos
9
Projektowanie złożonych systemów mechatronicznych
9.1
Dobór elementów
Odpowiednie elementy napędowe powinny zostać dobrane w zależności
od wymagań systemu docelowego, zanim zostanie stworzona dokumen-
tacja podłączeń złożonego systemu sterowania. Wyboru dokonuje się
poprzez zestawienie podsystemów pneumatycznych, hydraulicznych i
elektrycznych.
Bardzo trudne jest dobranie optymalnego rozwiązania dla konkretnego za-
stosowania, ponieważ pola zastosowań i parametry techniczne pokrywają
się w wielu przypadkach. Wiadomo także, iż w praktyce należy się zgodzić
na wiele kompromisów, aby osiągnąć konkretną funkcjonalność.
Poniższe napędy zostały dobrane w poprzednim przykładzie:
Siłownik pneumatyczny został dobrany jako odpowiedni do czynności
mocowania.
Siłownik hydrauliczny został dobrany jako najodpowiedniejszy napęd
posuwu.
Silnik elektryczny ze skrzynią biegów został dobrany do napędu wiertarki,
ponieważ musi realizować dwie różne prędkości obrotowe, zgodnie z
listą wymagań.
Sterownik PLC został wybrany do realizacji złożonego systemu sterow-
ania.
Bezstykowe krańcówki siłowników z czujnikami kontaktronowymi zostały
dobrane do detekcji położeń krańcowych dla siłownika pneumatycznego,
natomiast dla siłownika hydraulicznego, dobrane zostały indukcyjne
czujniki zbliżeniowe.
Możliwe jest także użycie mechanicznych krańcówek dla obu siłowników,
lecz raczej nie powinny być stosowane, ze względu na stykowy charakter
pracy.
Dodatkowo, czujnik ciśnienia może zostac użyty do sprawdzania czy
siłownik pneumatyczny stosuje wystarczającą siłę łączącą. Dla uproszc-
zenia, warunek ten może zostać pominięty w naszym przykładzie.
Systemy i funkcje mechatroniczne - Podręcznik
158
Minos
9.2
Środki pomocnicze w projektowaniu złożonych systemów sterowania
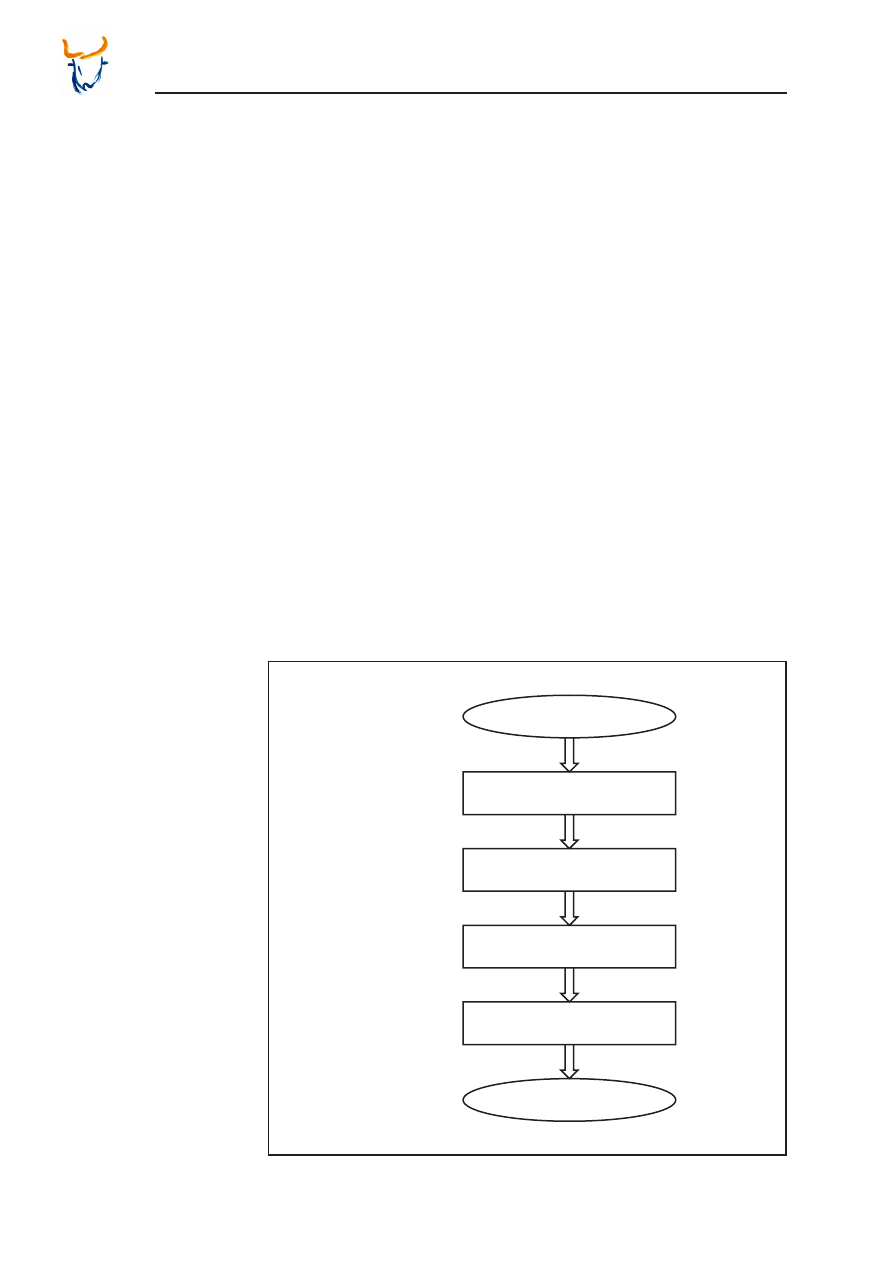
Rys. 9.1:
Metody rozwoju systemów sterowania
doświadczenie
początkowe rozważania
implementacja teoretyczna
konstrukcja urządzenia
testowanie urządzenia
i analiza wyników
3. step
4. step
1. step
2. step
cel sterowania
Celem teraz jest stworzenie schematu łącznego złożonego systemu
sterowania. Ważne jest tu, aby podzielić procedurę sterowania na kroki
operacyjne i implementować jeden po drugim.
Na początek, należy zwrócić uwagę na rozważania początkowe. Różne
dopełniające metody reprezentacji mogą zostać użyte w celu osiągnięcia
zamierzonego celu. Aby uzyskać lepsze zrozumienie pomiędzy eksper-
tami, brygadzistami i inżynierami w różnych gałęziach, pracujących
razem w projekcie, wspólne symbole graficzne i schematy powinny być
zastosowane jako uzupełniające metody reprezentacji.
Następnie, założenia mogą zostać zamienione na schemat podłączeń
systemu sterowania.
Po tym, jak schematy łączne zostały stworzone, urządzenie może zostać
zbudowane. Oddzielne elementy konstrukcyjne urządzenia powinny być
oznaczane tymi samymi symbolami, co w schematach podłączeń.
Ostatnim krokiem jest testowanie systemu sterowania. Jakiekolwiek
zmiany wprowadzone do systemu w tej fazie, powinny być koniecznie
zarejestrowane w dokumentacji.
Systemy i funkcje mechatroniczne - Podręcznik
159
Minos
Schemat pozycjonowania przedstawia usytuowanie elementów
napędowych maszyny lub urządzenia, a także zapewnia konkretne infor-
macje na temat sposobu zamocowania. Schemat pozycjonowania musi
być czytelny i musi zawierać jedynie najważniejsze informacje.
Usytuowanie pojedynczych przełączników siłownika nie jest przed-
stawione na schemacie pozycjonowania. Ta informacja jest podana
pisemnie:
B1
siłownik pneumatyczny 1A wsunięty
B2
siłownik pneumatyczny 1A wysunięty
B3
siłownik hydrauliczny 2A wsunięty
B4
pozycja przejścia z ruchu szybkiego na ruch roboczy
B5
siłownik hydrauliczny 2A wysunięty
Oznaczenia przełączników także powinny być opisane:
S0
przełącznik startu
S2
przycisk prędkości obrotowej n
1
S3
przycisk prędkości obrotowej n
2
9.2.1 Schemat pozycjonowania
Rys. 9.2:
Plan pozycjonowania przy obróbce koła bębna do nawijania liny
obróbka:
ruch obrotowy
wiercenia
silnik elektryczny M1
obróbka:
posuw wiercenia przy pomocy
siłownika hydraulicznego 2A
z B3, B4 i B5
ruch mocowania:
siłownik pneumatyczny 1A
z B1 i B2

Systemy i funkcje mechatroniczne - Podręcznik
160
Minos
Diagram przepływu programu ukazuje zależności funkcjonalne pomiędzy
składowymi procedurami, które tworzą sekwencyjnie wykonywany pro-
gram.
Wszystkie możliwe ścieżki przepływu programu pokazane są na dia-
gramie przepływu programu. Symbole graficzne użyte w diagramie, ujed-
nolicone zostały przez DIN 66 001. Diagram przepływu programu jest
także nazywany diagramem struktury programu.
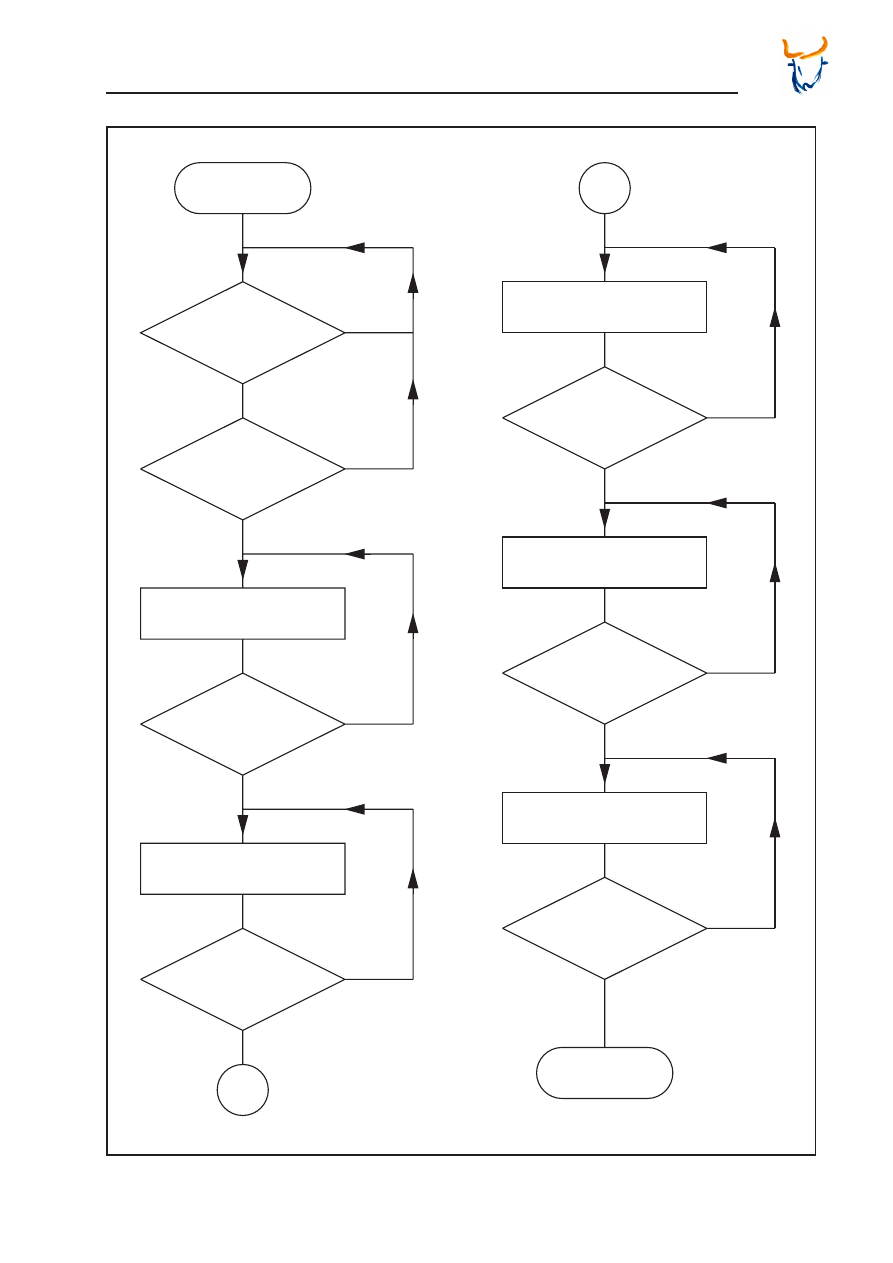
Diagram przepływu programu dla wcześniej przytoczonego przykładu,
składa się z następujących kroków:
1. Krok:
Gdy wybrana została prędkość obrotowa n
1
(przycisk S2)
lub n
2
(przycisk S3), warunek startu jest spełniony.
2. Krok:
Gdy wybór prędkości został dokonany i przełącznik startu
S1 jest załączony, wtedy siłownik mocujący 1A może
zostać wysunięty.
3. Krok:
Gdy czujnik B2 jest załączony, siłownik posuwu 2A musi
zostać wysunięty w trybie szybkim i napęd wiertarki M1
musi zostać włączony.
4. Krok:
Gdy czujnik B4 jest załączony, siłownik posuwu 2A musi
zostać przełączony na ruch roboczy.
5. Krok:
Gdy czujnik B5 jest załączony, siłownik posuwu 2A musi
zostać wycofany do pozycji końcowej i silnik wiertarki M1
musi zostać wyłączony.
6. Krok:
Po wycofaniu, siłownik posuwu 2A uaktywnia czujnik
B3. Siłownik ustalający 1A musi powrócić do pozycji
początkowej.
7. Krok:
Gdy siłownik ustalający osiągnie pozycję krańcową, uakty-
wnia czujnik B1, który kończy program.
Gdy użyte są dwa oddzielne przyciski do wyboru prędkości obrotowej,
może się zdarzyć, iż oba przyciski zostaną włączone w tym samym czasie.
Przypadek taki jeszcze nie został uwzględniony w naszym przykładzie.
Później, podczas tworzenia schematów połączeń, dozwolony powinien
być wybór tylko jednej prędkości obrotowej.
9.2.2 Diagram przepływu programu
Systemy i funkcje mechatroniczne - Podręcznik
161
Minos
Rys. 9.3:
Diagram przepływu programu
start
S2 + S3 = 1
wybór prędkości
obrotowej
tak
nie
tak
nie
tak
nie
tak
nie
S1 = 1
1A +
mocowanie
2A +, M1 +
ruch szybki, silnik wł.
B2 = 1
B4 = 1
1
1
2A +
ruch roboczy
tak
nie
B5 = 1
2A –, M1 –
wsuw posuwu, silnik wył.
tak
nie
B3 = 1
1A –
wsuw mocowania
tak
nie
B1 = 1
koniec

Systemy i funkcje mechatroniczne - Podręcznik
162
Minos
Schemat logiczny jest źródłem czytelnych informacji dotyczących działań
logicznych, relacji i przepływów sygnałów w sterowaniu, niezależnie od
konkretnego rozwiązania sterowania czy użytej techniki. Jednak schemat
logiczny nie opisuje techniki projektowania sterowania.
Używa się działań logicznych AND, OR i NOT. Stan sygnałów jest
zapamiętywany za pomocą przerzutników. Reguły algebry Boole’a także
tu obowiązują.
Dlatego też, schemat logiczny jest schematem przepływu sygnałów z
symbolami graficznymi dla działań i komórek pamięci, gdzie linie działania
reprezentowane są za pomocą strzałek. Symbole graficzne dla funkcji log-
nicznych i elementów binarnych są określone w normie EN 60617-12.
Wielu projektantów nie używa tabel kombinacji dla prostych sterowań.
Preferują oni schematy logiczne z odpowiednimi symbolami działań.
Dlatego też, schemat logiczny zapewnia lepsze zrozumienie pomędzy
elektrykami, a specjalistami i pracownikami w dziedzinie pneumatyki i
hydrauliki.
Sekwencja przepływu może być także opisana przy użyciu metody al-
gebraicznej. W takim przypadku, używa się typowych symboli działań
logicznych. Kropka symbolizuje działanie AND, podczas gdy znak plus
oznacza działanie OR.
Na końcu wiersza oznaczony jest czujnik, który odpowiedzialny jest za
nadzorowanie wykonywanej operacji.
1. Krok:
S2 + S3 = x
2. Krok:
x · S1 = 1A +
∅
B2
3. Krok:
B2 = 2A ruch szybki · M1 + ∅ B4
4. Krok:
B4 = 2A ruch roboczy
∅
B5
5. Krok:
B5 = 2A – · M1 –
∅
B3
6. Krok:
B3 = 1A –
∅
B1
7. Krok:
B1 = koniec programu
9.2.3 Schemat logiczny
Systemy i funkcje mechatroniczne - Podręcznik
163
Minos
Rys. 9.4:
Schemat logiczny
S
S2
S3
>=1
&
S1
start
R
B3
1A
S
R
B5
2A
ruch szybki
B2
S
&
B4
R
B5
2A
ruch roboczy
B2
S
R
B5
M1
B2
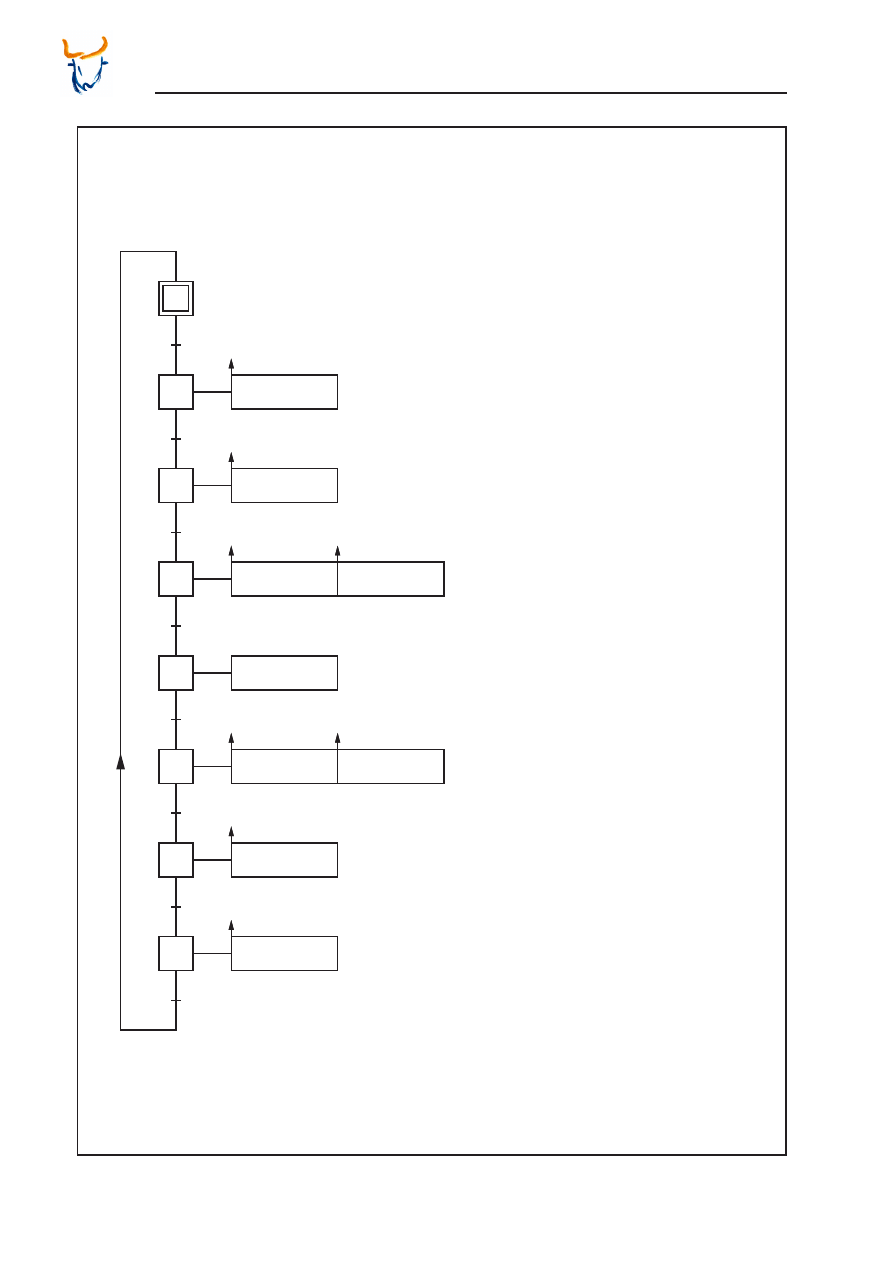
Plan funkcji jest podobny do sekwencyjnego schematu funkcyjnego,
języka programowania sterowników PLC. Składa się z sekwencji kilku
kroków. Jedna lub więcej czynności może zostać przypisana do jednego
kroku. Pierwszy krok jest oznaczany odmiennie.
Tylko jeden krok ze swoimi czynnościami jest aktywny w danym momencie
podczas wykonywania operacji. Czynności, które powinny być aktywne
poprzez kilka kroków, muszą zostać aktywowane i ponownie zresetowane
później. Przełączanie do kolejnego kroku jest wykonywane w zależności
od warunków tranzycji pomiędzy dwoma krokami.
Plan funkcji pozwala na reprezentację procedur sterowania w bardzo
zwięzłej postaci. Zarówno przybliżone jak i precyzyjne reprezentacje
struktury sterowania są możliwe.
W Niemczech, plan funkcji określony przez DIN 40719 został zastąpiony
w roku 2005 przez standard Grafcet, zgodnie z normą EN 60848.
9.2.4 Plan funkcji
Systemy i funkcje mechatroniczne - Podręcznik
164
Minos
Rys. 9.5:
Grafcet
1
2
3
4
5
6
7
8
S2 + S3
S1
B2
B4
B5
B3
B1
H1 : = 1
Y2 : = 1
Y3
Y1 : = 0
„włączenie sygnalizacji prędkości“
„mocowanie“
„ruch szybki i silnik włączony“
„ruch roboczy“
„wsuw i silnik wyłączony“
„wsuw siłownika mocującego“
„kasowanie wyboru prędkości obrotowej“
„przedmiot zamocowany“
„koniec ruchu szybkiego“
„pozycja krańcowa ruchu roboczego“
„siłownik posuwu wsunięty“
„siłownik mocujący wsunięty“
„przycisk start“
„wybór prędkości obrotowej“
M1 : = 1
Y2 : = 0
M1 : = 0
H1 : = 0
Y1 : = 1
Systemy i funkcje mechatroniczne - Podręcznik
165
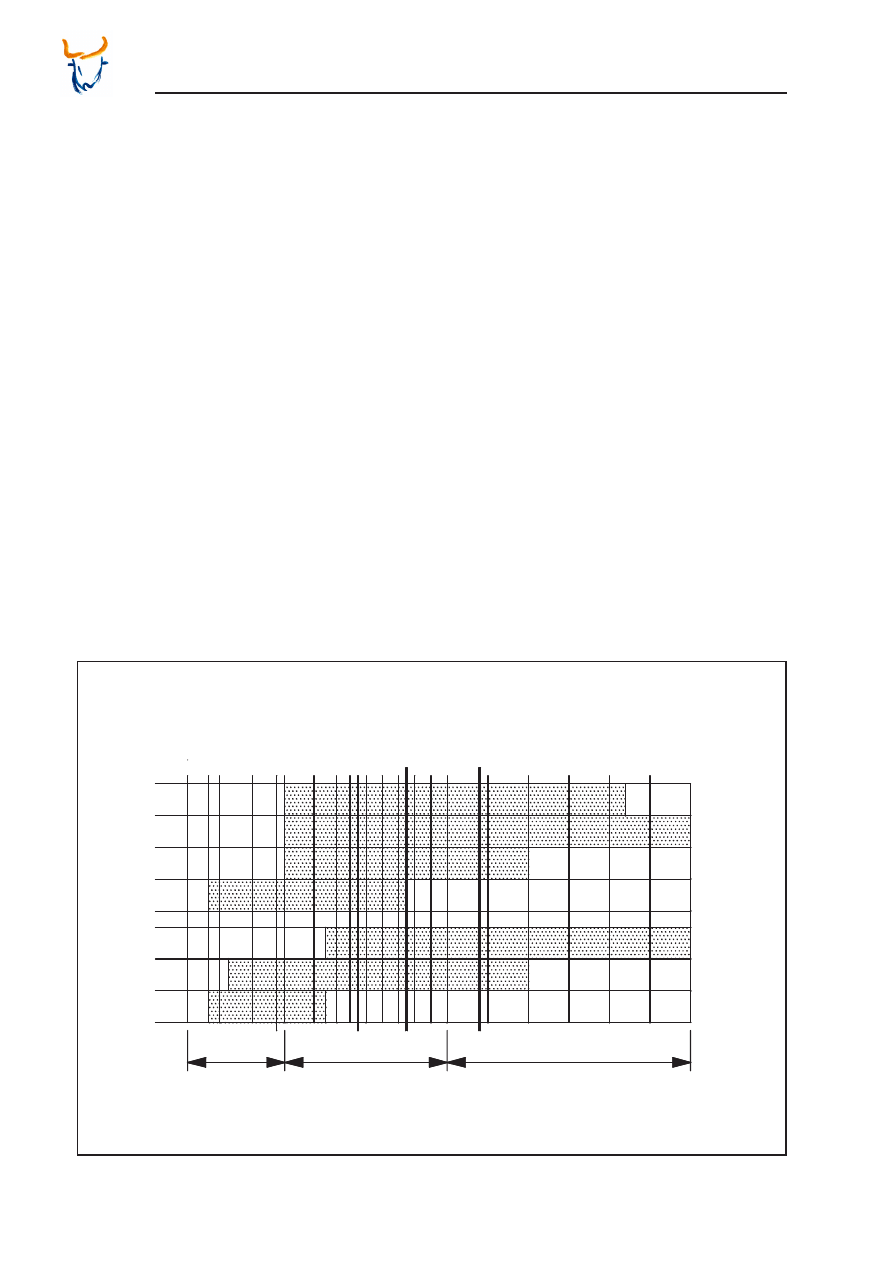
Minos
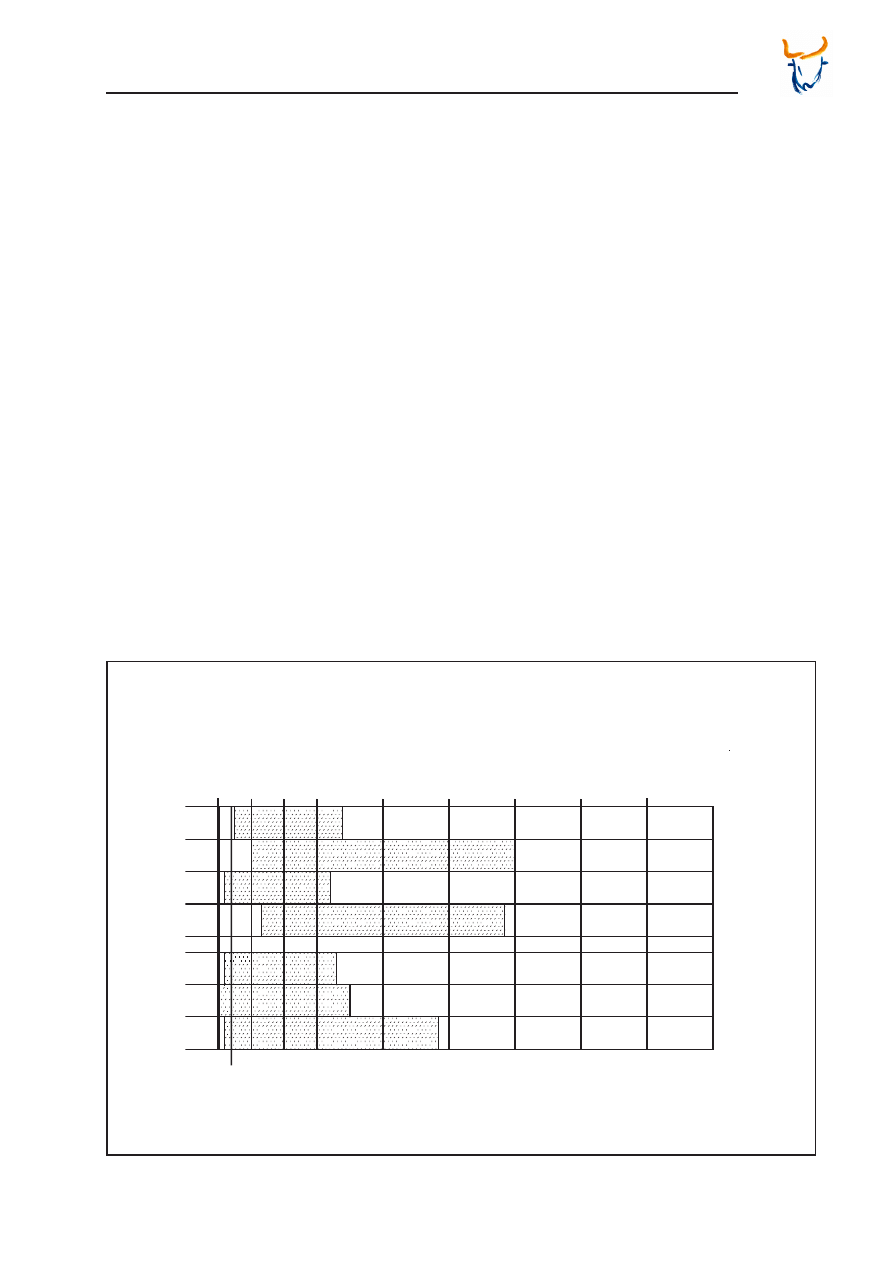
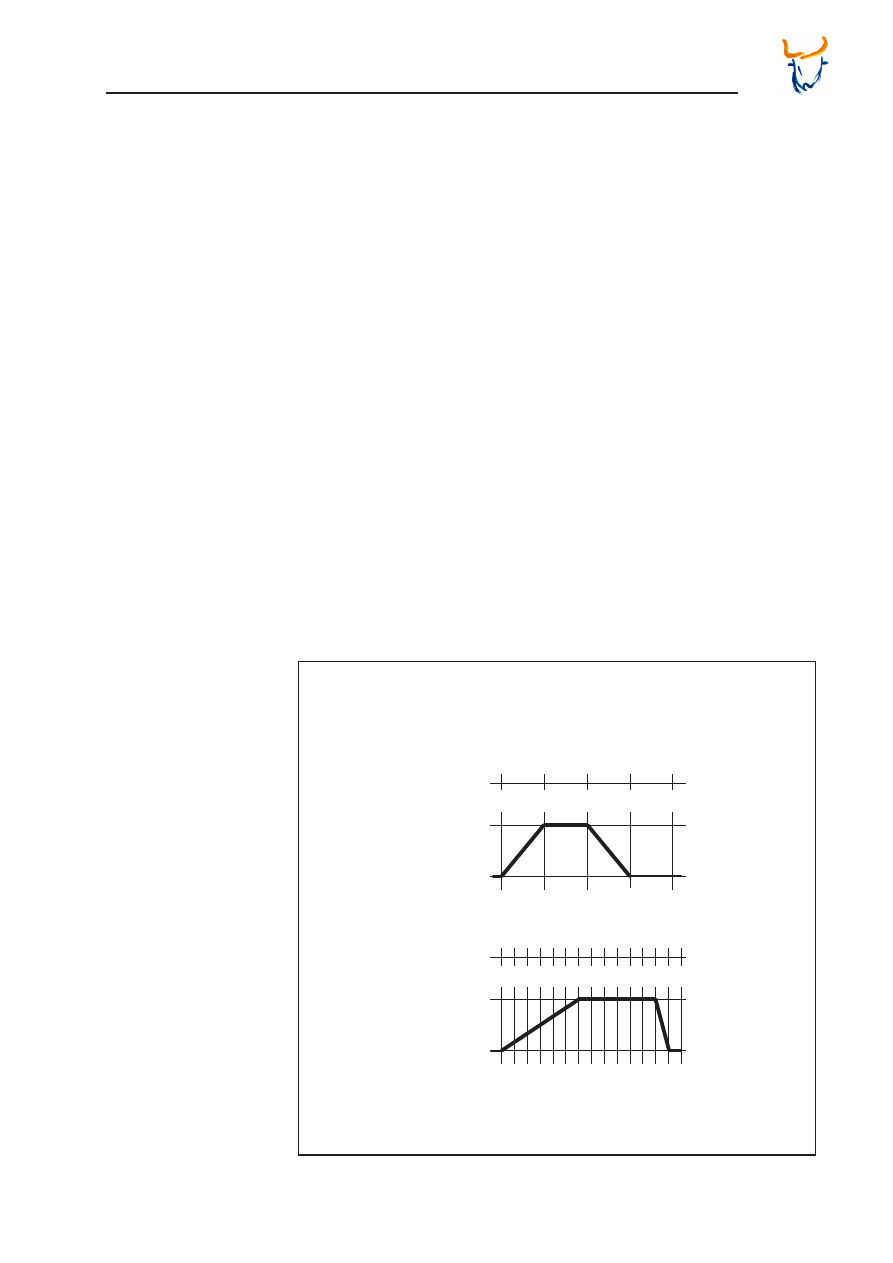
Wykres funkcji to na ogół wykres ścieżki lub wykres stanu. Dlatego też,
wykresy ścieżki od kroku i ścieżki od czasu, także nazywane są wykre-
sami funkcji.
Wykresy ścieżki od czasu korzystają z linii do reprezentacji ruchu el-
ementu napędu. Te wykresy są odpowiednie jedynie dla prostych funkcji,
takich jak sekwencja ruchu jednego lub więcej siłowników.
Na wykresie ścieżki od czasu, sekwencja wykonywania operacji jest
podzielona na pojedyncze kroki. Zmiany stanu elementu konstrukcyjnego
rozpoczynają i kończą się na pomocniczych liniach siatki. Skala czasu
może być dodatkowo ustawiona prostopadle do podziału na kroki. Zatem
skala ta nie jest liniowa.
Oznaczenie stanu jest umiejscowione przy poziomych liniach siatki. Na
przykład, stan 0 siłownika 1A oznacza, iż tłok jest wsunięty. Pozycja
wysunięta oznaczona jest stanem 1.
Natomiast w przypadku wykresów ścieżki od czasu, linie pomocnicze
umiejscowione są w równych odstępach czasu. Dlatego też, prędkość
siłownika jest jasno reprezentowana przez gwałtowność zmian stanu.
9.2.5 Wykres funkcji
Rys. 9.6:
Wykresy ścieżki od kroku i ścieżki od czasu
1A
1
0
1
3
4
5
2
krok
1A
1
0
0
4 6
10
2
czas (s)
8
12 14
Systemy i funkcje mechatroniczne - Podręcznik
166
Minos
Wykresy funkcji reprezentują sekwencje funkcjonalne jednej lub wielu
jednostek operacyjnych i kombinacji techniczno - sterowaniowych konk-
retnych komponentów konstrukcyjnych. Jedna współrzędna reprezentuje
stan, na przykład ścieżkę, ciśnienie, kąt lub częstotliwość. Kroki są rep-
rezentowane przez drugą współrzędną. Czas także jest przedstawiany,
lecz w tym przypadku, reprezentacji nie jest przypisana żadna skala.
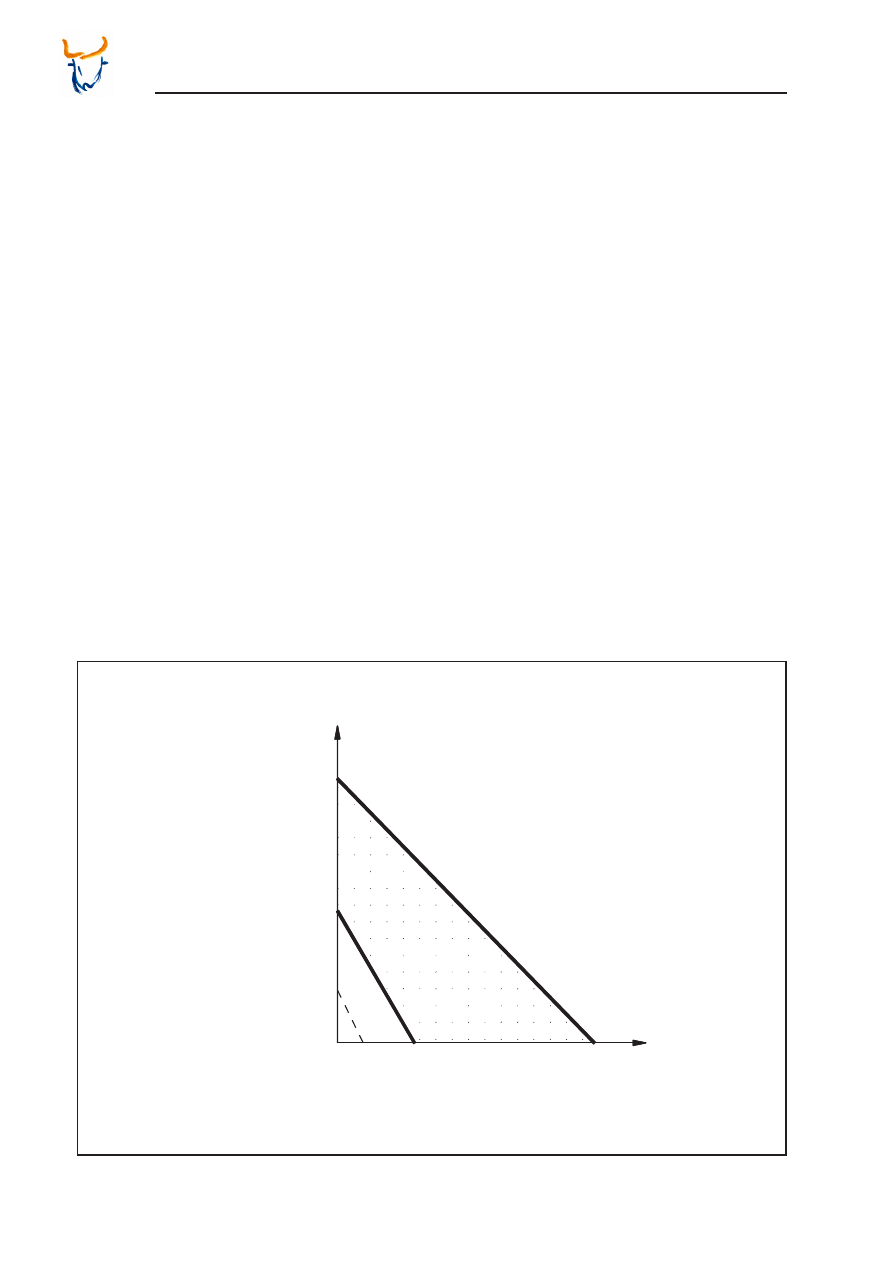
Linie funkcji oznaczają stan jednostki konstrukcyjnej lub elementu pod-
czas sekwencji operacyjnej. Pozycja nieaktywna jest oznaczana za
pomocą cienkiej linii. Wszystkie pozostałe stany, które różnią się od stanu
nieaktywnego, oznaczane są grubą linią.
Linie funkcji siłownika są reprezentowane liniami łamanymi pomiędzy
dwoma krokami. Linie te wskazują czas pracy siłownika. Przełączanie
rozdzielaczy sterujących siłownikami lub silników elektrycznych oznac-
zane jest pionowymi liniami funkcyjnymi.
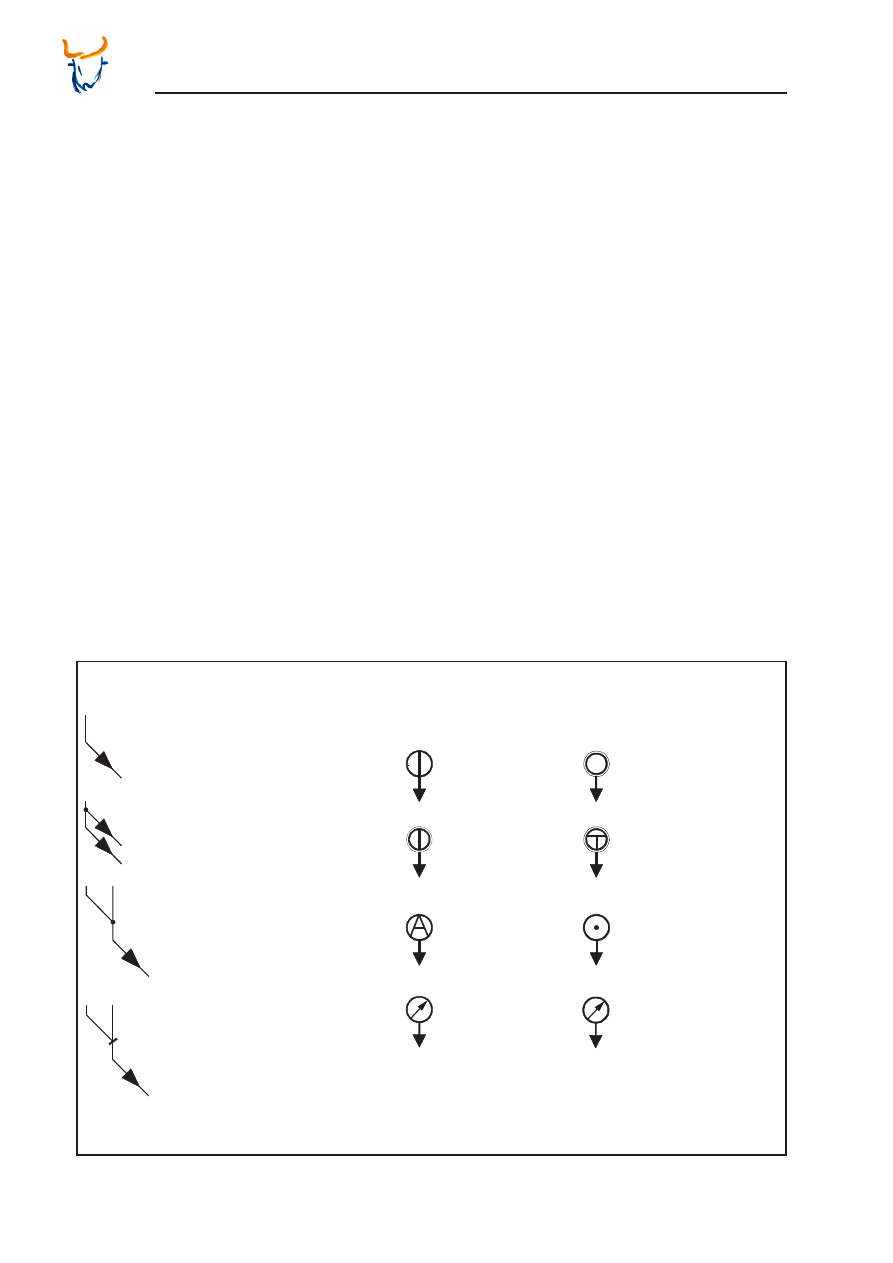
Zależności pomiędzy różnymi jednostkami operacyjnymi czy elementami
konstrukcyjnymi wskazywane są za pomocą linii sygnałowych. Linie
sygnałowe łączą linie funkcyjne. Strzałki pokazują kierunek działania
sygnałów.
Rys. 9.7:
Linie sygnałowe i wybrane symbole graficzne w wykresach funkcji
linia sygnałowa
rozgałęzenie sygnału
warunek OR
warunek AND
włącznik
włącznik-
wyłącznik
wyłącznik
przełącznik pracy
impulsowej
włacznik
automatyczny
wyłącznik w razie
niebezpieczeństwa
E
A
1
2
3
4
5
przełącznik wyboru
Systemy i funkcje mechatroniczne - Podręcznik
167
Minos
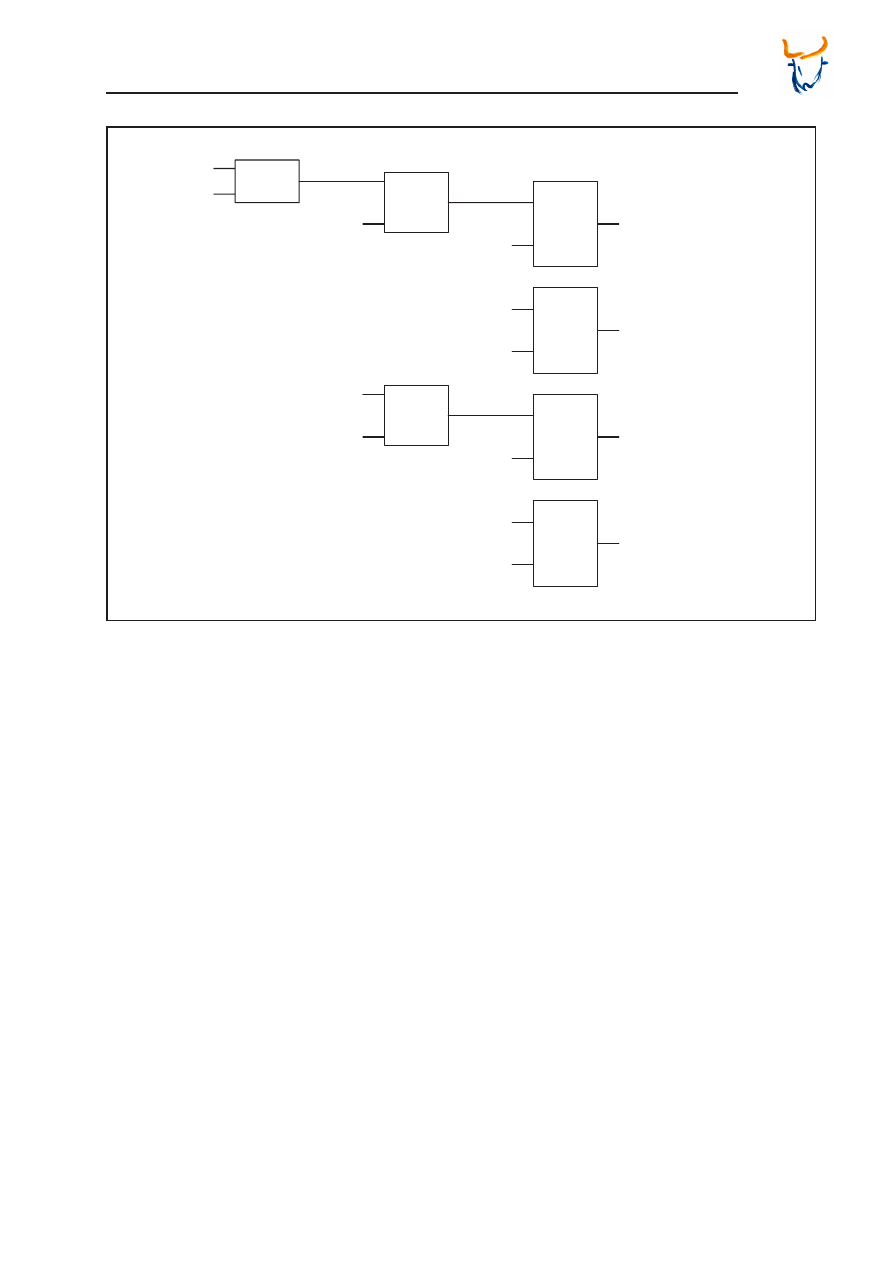
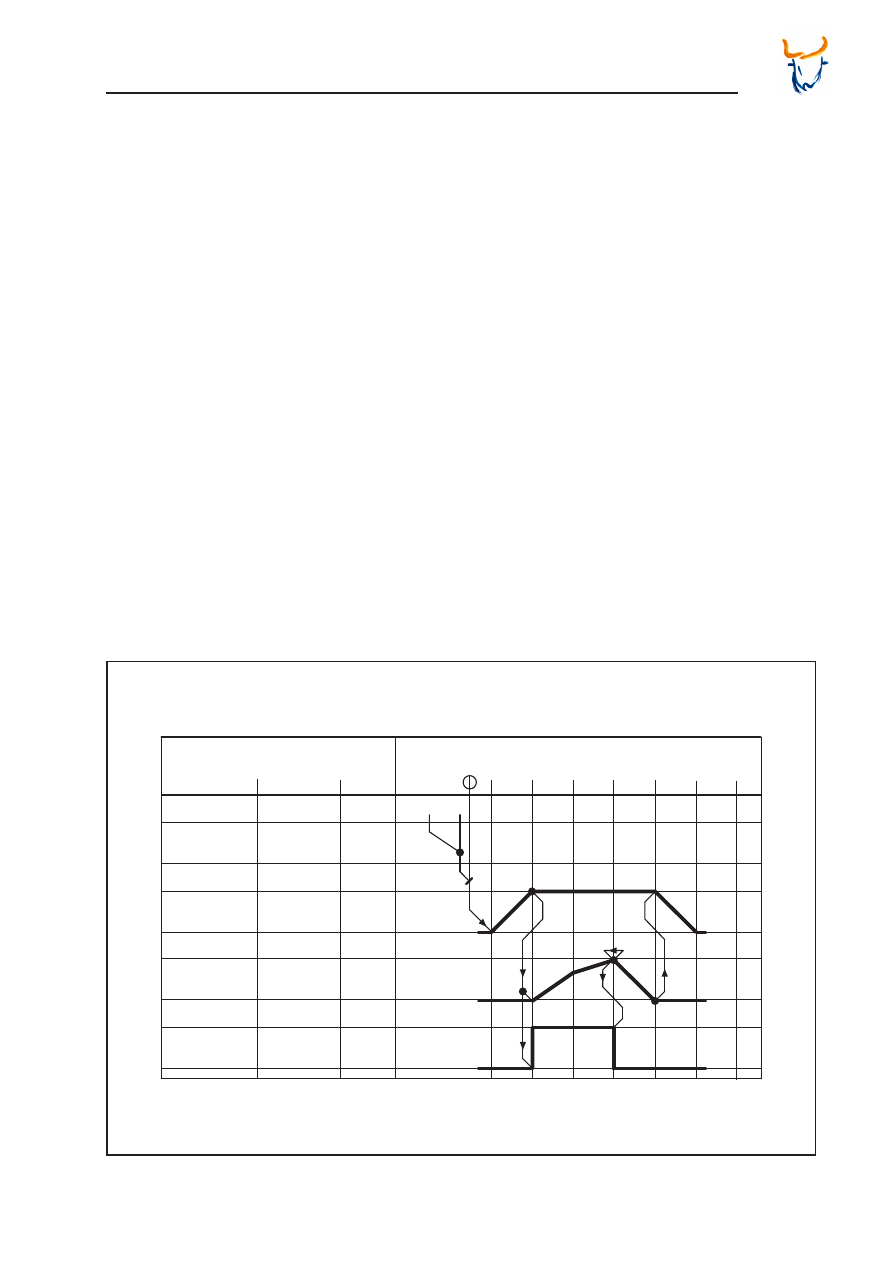
Rys. 9.8:
Wykres funkcji
mocowanie
posuw
1
0
1
0
1
0
1
3
4
5
2
1A
2A
M1
Zadanie
Stan
Oznaczenie
wiercenie
Komponent
Czas [s]
Krok
S3
B2
B5
S0
B3
6=1
S2
Punkty na liniach funkcji symbolizują krańcówki. Nie muszą koniecznie
być usytuowane na końcach linii funkcji. Mogą być także aktywne pod-
czas dłuższej ścieżki.
Działanie OR na sygnałach lub na odgałęzieniach sygnałów może być
oznaczane za pomocą punktów, podczas gdy działanie AND jest sym-
bolizowane przez ukośnik.
Na poniższym rysunku, sygnały z elementów S2 i S3 zostają poddane
operacji OR. Sterowanie rozpoczynane jest przez przycisk S0. Sygnał
wyboru prędkości obrotowej jest mnożony z sygnałem startującym przy
użyciu bramki AND.
Jeżeli warunki startu zostaną spełnione, siłownik mocujący zostanie
wysunięty. Po osiągnięciu pozycji krańcowej, aktywuje krańcówkę B2,
która załącza szybki ruch siłownika posuwu i silnik wiertarki. Przełączenie
z ruchu szybkiego na ruch roboczy może zostać zidentyfikowane w
punkcie przegięcia linii funkcji.
Gdy siłownik posuwu osiągnie swą pozycję krańcową, silnik wiertarki zost-
anie wyłączony i rozpocznie się posuw wsteczny siłownika posuwu.
Gdy siłownik powróci do pozycji wsuniętej, siłownik mocujący także
zostanie wycofany i ponownie osiągnięta zostanie pozycja startowa.

Systemy i funkcje mechatroniczne - Podręcznik
168
Minos
Schemat podłączeń jest używany do oznaczania wszystkich urządzeń,
linii połączeniowych i podłączeń systemu sterowania. Jest to jeden z
najważniejszych środków komunikacji pomiędzy technikami.
Norma DIN ISO 1219 zawiera większość używanych symboli graficznych
urządzeń hydraulicznych i pneumatycznych oraz elementów konstruk-
cyjnych. Listy urządzeń są dodatkowo wykorzystywane dla bardzo roz-
budowanych układów.
Różne części normy EN 61082 zawierają najważniejsze standardy i
symbole wykorzystywane w elektrotechnice.
Schematy połączeń i okablowania są bardzo istotne w elektrotechnice,
hydraulice i pneumatyce. Zawierają informacje o okablowaniu wewnątrz
urządzenia, pomiędzy urządzeniami i częściami urządzeń, a także
pomiędzy elementami wejść i wyjść, które są montowane w różnych
miejscach na maszynie.
Zanim zostaną stworzone przykładowe schematy podłączeń, należy
ustalić, jakie komponenty powinny zostać użyte.
Dwukierunkowy siłownik pneumatyczny jest potrzebny jako element
napędowy do zamocowania dysku bębna liny. Spełnia on następujące
wymagania:
– ruch liniowy,
– siła mocująca jest w nezawodny sposób zapewniana.
Pneumatycznie sterowany rozdzielacz typu 5/3 (5 dróg, 3 położenia)
został dobrany do elementu wykonawczego. Spełnia on poniższe wyma-
gania:
– pewne mocowanie i uwalnianie,
– pewne mocowanie w przypadku zaniku mocy, zapewniane przez
blokującą pozycję środkową.
Zawór dławiąco-zwrotny został dobrany jako element sterujący. Spełnia
on następujący wymóg:
– ruch mocujący ze stałą prędkością.
Dwa rozdzielacze typu 3/2 wymagane są jako elementy sygnałowe do
sterowania rozdzielaczy 5/3. Te rozdzielacze sterowane są ręcznie, a
powrót do pozycji początkowej zapewniają sprężyny.
9.2.6 Schemat podłączeń
Systemy i funkcje mechatroniczne - Podręcznik
169
Minos
Źródło sprzężonego powietrza z modułem obsługi jest użyte do przy-
gotowania i generowania energii.
Dodatkowo, wymagany jest sprzęt monitorujący i wskazujący. W skład
tego sprzętu wchodzi zawór przelewowy i manometr. Zaspokajają one
następujący wymóg:
– monitorowanie siły mocowania.
Dwukierunkowy siłownik hydrauliczny jest wymagany jako element
napędowy do mechanizmu posuwu przy obróbce tarczy bębna liny.
Spełnia on poniższe wymagania:
– ruch posuwisty,
– siła posuwu 2000 N,
– bezpieczeństwo w przypadku przeciążenia,
– maksymalna prędkość posuwu 0,5 m/s.
Ręcznie sterowany rozdzielacz typu 4/3 użyty jest do obsługi siłownika.
Spełnia on wymóg:
– możliwość ustawienia ruchu szybkiego.
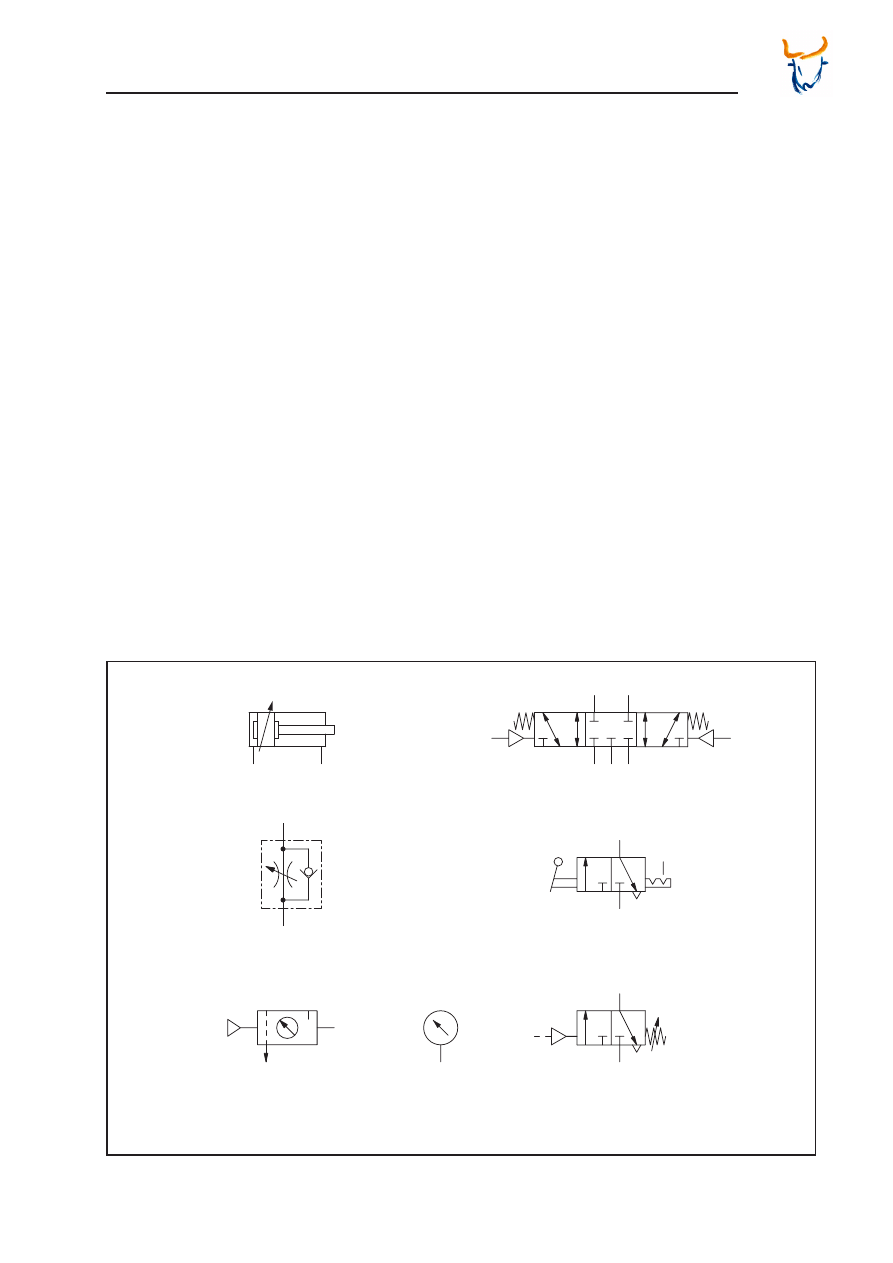
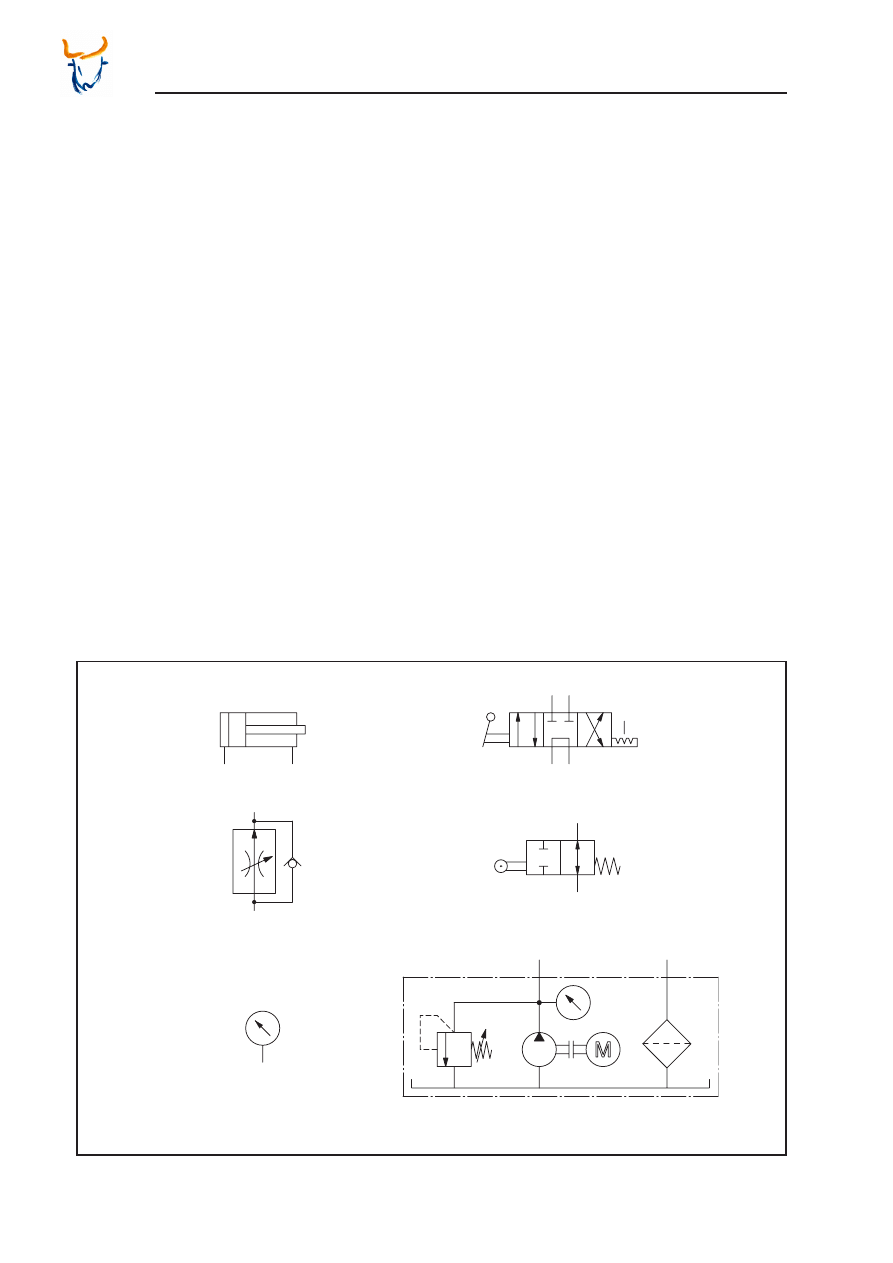
Rys. 9.9:
Symbole pneumatycznych elementów konstrukcyjnych
dwukierunkowy
siłownik
zawór dławiąco-zwrotny
źródło ciśnienia z
elementem obsługi
manometr
rozdzielacz 5-drogowy/3-położeniowy
rozdzielacz 3-drogowy/2-położeniowy
zawór przelewowy
Systemy i funkcje mechatroniczne - Podręcznik
170
Minos
Dwudrogowy zawór dławiący został dobrany jako element sterujący. Użyty
jest do ustawiania prędkości ruchu roboczego. Spełnia on warunek:
– równa i zależna od obciążenia prędkość podczas procesu sk-
rawania.
Zawór typu 2/2 potrzebny jest jako element sygnałowy do przełączenia
prędkości siłownika z posuwu szybkiego na posuw roboczy. Ten zawór
jest przesterowywany przez siłownik przy użyciu rolki .
Hydrauliczny agregat został użyty do generowania i przygotowywania
energii. Zawiera on zawór przelewowy kontroli ciśnienia i flitr. Pompa
hydrauliczna napędzana jest silnikiem elektrycznym.
Dodatkowo, parę nanometrów użytych jest jako elementy monitorujące
i wskazujące.
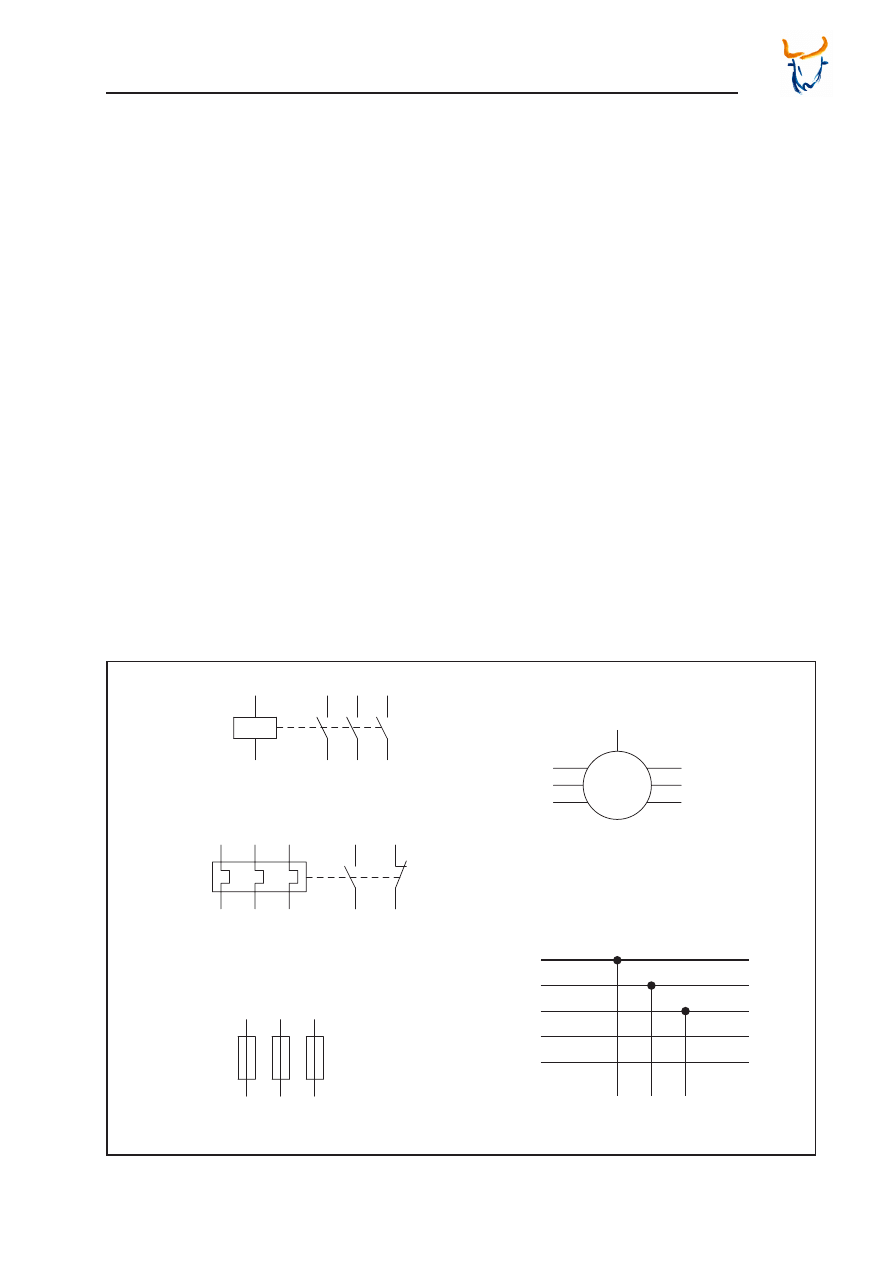
Rys. 9.10: Symbole hydraulicznych elementów konstrukcyjnych
M
siłownik dwukierunkowy
rozdzielacz typu 4/3
rozdzielacz typu 2/2
zawór kontroli przepływu
agregat hydrauliczny
manometr
Systemy i funkcje mechatroniczne - Podręcznik
171
Minos
Silnik elektryczne ze spiralnymi zwojami został dobrany jako element
napędowy ruchu roboczego wiertarki. Zaspokaja on następujące wyma-
gania:
– ruch obrotowy,
– ustawiana prędkość obrotowa,
– moc skrawania 1,6 kW.
Stycznik użyty jest jako element przełączający. Spełnia następujący
wymóg:
– uzyskanie obu prędkości obrotowych n
1
i n
2.
Oprzyrządowanie bezpieczeństwa jest także potrzebne w obwodzie
elektrycznym. Przekaźnik zabezpieczenia termicznego jest tu użyty.
Spełnia wymaganie:
– ochrona przeciw zbyt wysokimi prądami.
Dodatkowo, automatyczne bezpieczniki są potrzebne dla trzech faz
energii elektrycznej.
Moc elektryczna jest generowana poza maszyną. Jest pobierana z
trójwazowej sieci elektrycznej.
Rys. 9.11: Symbole elektrycznych elementów konstrukcyjnych
trójfazowa sieć zasilająca
bezpieczniki
1W
1V
1U
PE
2W
2V
2U
4
F1
2
6
L2
F0
L1
L3
L3
N
PE
3/N/PE ~ 50 Hz 400/230 V
L1
L2
M
3˜
3
1
5
98 96
97 95
przekaźnik zabezpieczenia
termicznego
2
1
4
3
6
5
K1
stycznik
silnik elektryczny
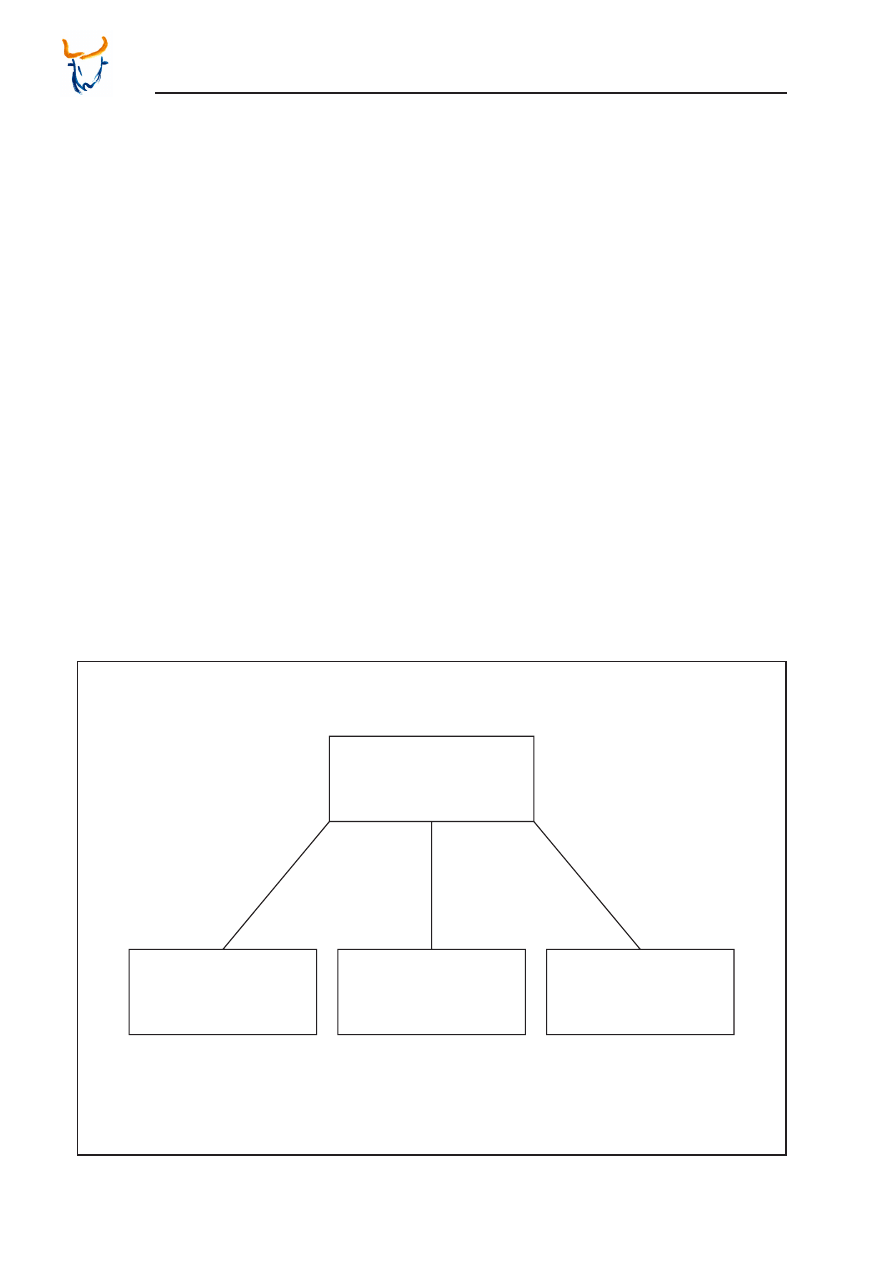
Systemy i funkcje mechatroniczne - Podręcznik
172
Minos
Aby stworzyć złożony system sterowania, należy go najpierw podzielić
na podsystemy. Podsystemy, które korzystają z tych samych zasobów
energii, powinny raczej być uważane za całość przy tworzeniu schematów
działania.
Mocowanie w przykładzie jest wykonywane przy użyciu komponentów
pneumatycznych. Napęd posuwu jest realizowany hydraulicznie. Trzeci
subsystem do wiercenia bazuje na napędzie elektrycznym.
Tworzenie pneumatycznych, hydraulicznych i elektrycznych schematów
działania dla przykładu może zostać dokonane niezależnie od siebie.
Dla każdego subsystemu powinny zostać rozważone różne instrukcje.
9.3
Tworzenie schematów podłączeń dla złożonego systemu sterowania
Rys. 9.12: Złożony system ze swoimi podsystemami
podsystem
pneumatyczny
Mocowanie
Napęd posuwu
podsystem
hydrauliczny
System obróbki
tarczy bębna liny
Podsystemy
-system złożony-
Napęd wiercenia
podsystem
elektryczny

Systemy i funkcje mechatroniczne - Podręcznik
173
Minos
9.3.1 Pneumatyczny schemat działania
Podczas tworzenia pneumatycznych schematów działania należy się
odwołać do normy DIN ISO 1219. Tworzenie schematów podłączeń i
opisy poszczególnych symboli zawarte są w jej drugiej części.
Reprezentacje w schematach podłączeń powinny być jasne. Pozycje i
rozmieszczenie komponentów nie powinny być rozważane.
Przepływ energii w pneumatycznych schematach podłączeń powinien
mieć tendencję z dołu do góry. Osobne obwody sterowania powinny być
umieszczone sukcesywnie od lewej do prawej.
Elementy napędowe, takie jak siłowniki i silniki, są ustawione w górnej
części schematu podłączeń. Tłoki siłowników powinny być wysuwane w
prawo. Numeracja jest wykonywana kolejno od lewej do prawej.
Elementy sterujące są umieszczane poniżej elementów napędowych.
Elementy sygnałowe są usytuowane w dolnej części schematu. Źródło
zasilania powinno być zaznaczone u dołu, możliwie na lewo.
Poniższe litery są używane do oznaczania elementów konstruk-
cyjnych:
A napędy, siłowniki, silniki,
V zawory, rozdzielacze
S czujniki, przyciski, rolki,
Z inne komponenty, źródło mocy.
Siłowniki powinny być oznaczane kolejno symbolami 1A, 2A itd. Wszystkie
zawory i rozdzielacze, mające wpływ na siłownik 1A są oznaczane 1V
plus kolejny numer. Ten numer jest dobierany w zależności od położenia,
od dołu do góry i od lewa na prawo.
Zawory i rozdzielacze, które mają wpływ na siłownik 2A są odpowiednio
oznaczane 2V plus kolejny numer.
Pierwsza cyfra opisu rolki także wskazuje siłownik, przy którym rolka jest
zamontowana. Nie jest istotne, który zawór/rozdzielacz czy siłownik jest
od niej zależny.
W wielu przypadkach, komponenty źródła ciśnienia nie są oznaczane
oddzielnym siłownikiem czy obwodem. Są oznaczane prefiksem zero.
Oznaczenie może być umieszczone w ramce.
Pneumatyczne schematy podłączeń powinny być pokazane w pozycji
startowej z podanym ciśnieniem.
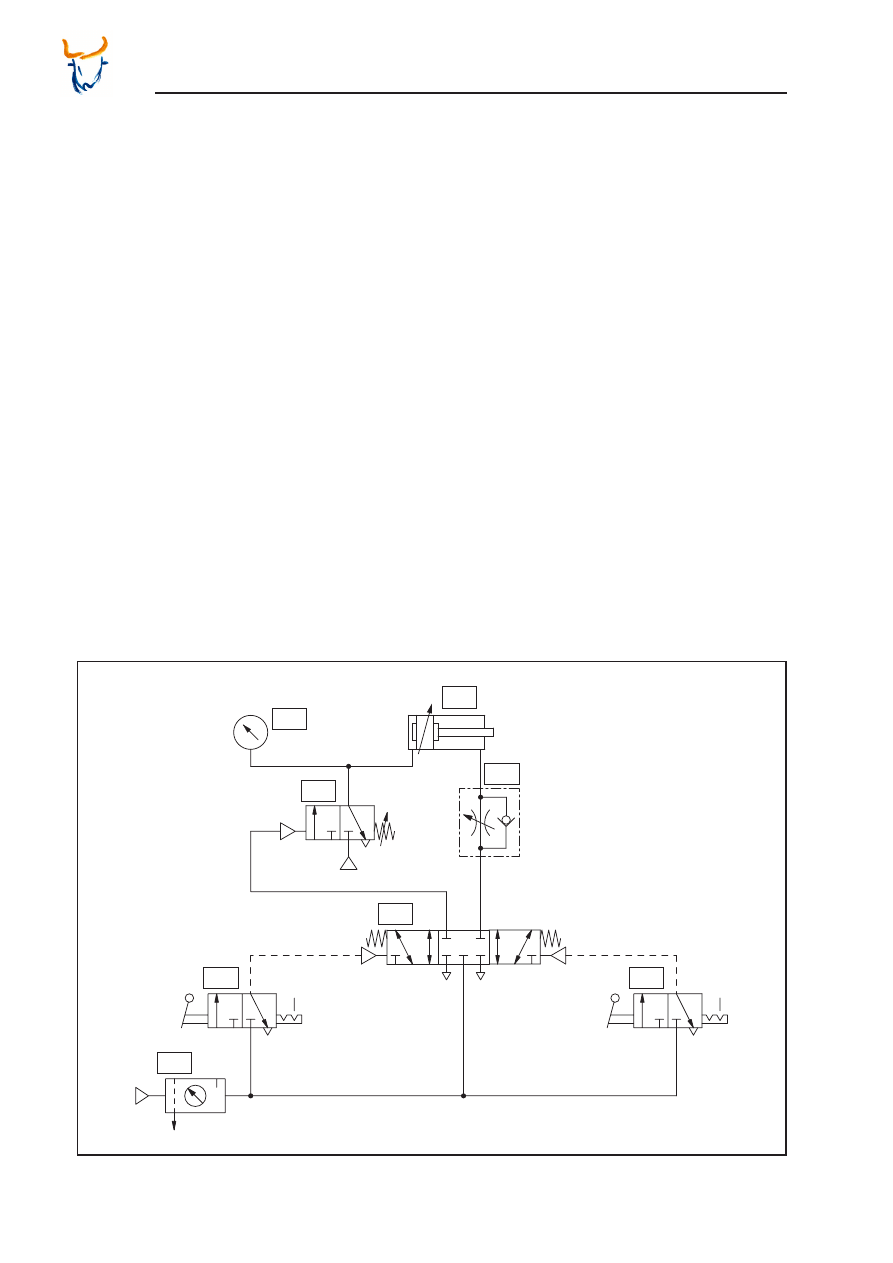
Systemy i funkcje mechatroniczne - Podręcznik
174
Minos
Rys. 9.13: Schemat podłączeń podsystemu pneumatycznego
1A
0Z
1V1
1V2
1V3
1S1
1S2
1Z1
Dodatkowo, poniższe pozycje urządzeń są zdefiniowane w hydraulice i
pneumatyce:
– Nieaktywna pozycja urządzenia
Energia nie jest podawana na urządzenie. Stan elementów kon-
strukcyjnych nie jest możliwy do ustalenia lub jest ustalony przez
producenta.
– Pozycja spoczynku elementów konstrukcyjnych
Tu, elementy ruchome znajdują się w określonej pozycji w stanie
nieaktywowanym.
– Pozycja inicjaliacji
Zasilanie jest załączone. Elementy konstrukcyjne przyjmują
określone stany.
– Pozycja startowa
Elementy konstrukcyjne znajdują się w stanie wymaganym do
rozpoczęcia procesu. Warunki startu są wymagane dla tej pozycji.
– Warunki startu
Warunki te zawierają kroki wymagane do przejścia ze stanu spoc-
zynku do pozycji startowej.

Systemy i funkcje mechatroniczne - Podręcznik
175
Minos
Hydrauliczny schemat działania także jest tworzony na podstawie DIN
ISO 1219. Schemat podłączeń ukazuje konstrukcję urządzenia hydraulic-
znego. Rzeczywiste położenie i ustawienie komponentów nie jest brane
pod uwagę przy tworzeniu schematu podłączeń.
Komponenty konstrukcyjne urządzenia na schemacie podłączeń powinny
być ułożone w kierunku przepływu energii:
– dół: symbol źródła energii,
– środek: element sterujący mocą,
– góra: element napędowy.
Rozdzielacze powinny być rysowane w poziomej pozycji jak tylko jest to
możliwe, podczas gdy rurociągi proste i bez krzyżowania się. Wszystkie
urządzenia powinny być pokazane w pozycji startowej.
W przypadku dużego systemu sterowania z wieloma pracującymi elemen-
tami, powinien on być podzielony na oddzielne łańcuchy sterowania,
gdzie jeden łańcuch może zostać uformowany dla każdego pracującego
elementu. Te łańcuchy sterowania powinny być rysowane możliwie w
sekwencji ruchu, równolegle do siebie.
Element napędowy z odpowiadającym mu elementem sterującym mocą,
tworzą łańcuch sterowania. Złożone sterowania hydrauliczne składają się
z wielu łańcuchów sterowania. Powinny one być ustawione równolegle
do siebie i oznaczone numerem referencyjnym.
Element będący źródłem energii nie może być przydzielony łańcuchowi
sterowania, ponieważ dotyczy on wielu łańcuchów w dużych systemach
hydraulicznych. Jest on oznaczany referencyjnym numerem 0.
Oznaczenie komponentu konstrukcyjnego może zostać rozszerzone o
numer urządzenia. Numer ten poprzedza pozostałe oznaczenia elementu
i jest oddzielony myślnikiem.
Oznaczenie elementu konstrukcyjnego to 2 - 3V5. Ma ono następujące
znaczenie:
2 numer urządzenia,
3 numer obwodu,
V oznaczenie komponentu,
5 numer komponentu.
Jest to oznaczenie zaworu z o numerze komponentu 5, urządzenia 2 i
obwodu 3.
9.3.2 Hydrauliczny schemat działania
Przykład
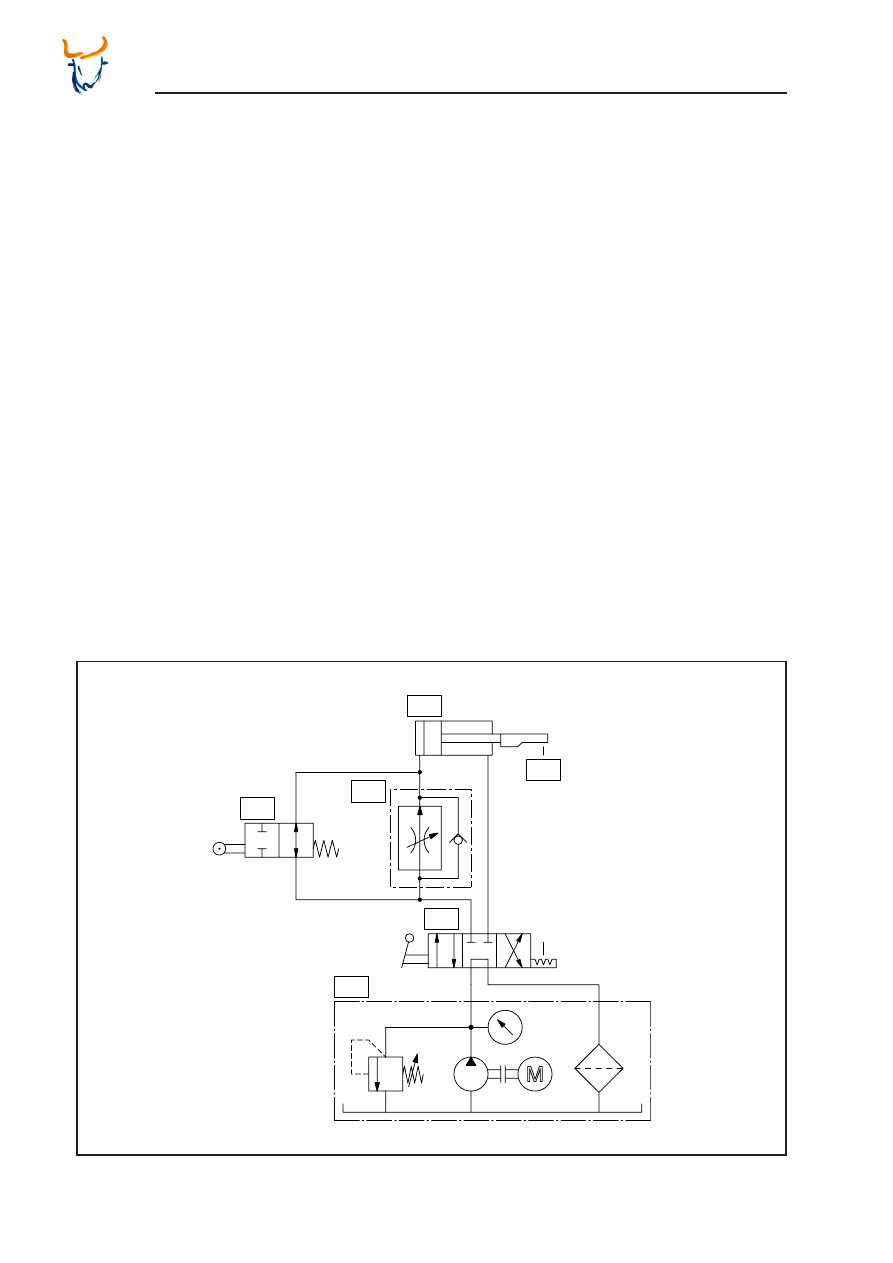
Systemy i funkcje mechatroniczne - Podręcznik
176
Minos
Rys. 9.14: Schemat podłączeń podsystemu hydraulicznego
M
0Z1
1V1
1V2
1S1
1S1
1A
Hydrauliczne schematy podłączeń mogą dodatkowo zawierać informacje
dotyczące pomp, silników hydraulicznych, zaworów bezpieczeństwa,
urządzeń do pomiaru ciśnienia, rur i linii wężowych.
Linie rurowe i wężowe powinny być oznaczane za pomocą ich średnicy
i grubości ścianek. Wartość ciśnienia przy której zadziała zawór
bezpieczeństwa, powinna być na nich oznaczona, tak jak temperatura
przełączania na przełącznikach temperaturowych.
Skala pomiarowa urządzeń monitorujących ciśnienie, jak i szerokość
filtrów, także powinny być oznaczone.
Dodatkowo na schematach podłączeń możliwe jest oznaczenie wydajności
pomp, parametrów napędzania, maksymalnych wartości ciśnienia oraz
chłonności silników.
Bardzo duże systemy zasilania w ciśnienie mogą być przedstawiane na
osobnych schematach podłączeń.

Systemy i funkcje mechatroniczne - Podręcznik
177
Minos
Standardy elektrotechnicznych symboli graficznych i schematów ob-
wodów w niemieckim zborze norm zostały sklasyfikowane w normach od
DIN 40700 do DIN 40772. Od początku roku 1997 wymagany jest nowy
system klasyfikacji, który zaczyna się numerem 60000. Stare oznaczenie,
na przykład IEC 617, zostało zamienione na IEC 60617, zgodnie z nowymi
edycjami i aktualizacjami.
Elektryczne symbole graficzne w Niemczech są klasyfikowane według
normy DIN EN 60617 “Symbole graficzne dla schematów obwodów”.
Norma ta zastąpiła DIN 40700.
Dyrektywa VDE (Niemieckiego Stowarzyszenia Elektroników, Elektro-
techników i Informatyków) określa dokumentację schematową obwodów
elektrycznych, która powinna zostać dostarczona z elektrycznymi elemen-
tami konstrukcyjnymi i urządzeniami. W jej skład wchodzą wszystkie
wymagane informacje dla użytkownika, dotyczące: montażu, testowania,
konserwacji i serwisowania elektrycznych systemów sterowania.
Według normy, dokumentacja w postaci schematu obwodu jest podzielona
ze względu na funkcję i typ reprezentacji na:
– schematy, które reprezentują metodę działania sterowania, czyli
uproszczone schematy obwodów, schematy przepływu prądu czy
schematy funkcyjne,
– schematy, które pokazują połączenia i rzeczywiste umiejscowienie,
takie jak schematy okablowania, schematy konfiguracyjne i listy
urządzeń.
Uproszczony schemat obwodów zawiera jedynie najważniejsze
urządzenia w obwodzie, aby pokazać jego funkcjonalność i strukturę.
Poniższe normy są istotne przy tworzeniu dokumentacji obwodu:
DIN EN 60617 symbole graficzne dla schematów obwodów,
DIN EN 60848 Grafcet, język do planowania funkcji w sterowaniach
sekwencyjnych,
DIN EN 61082 dokumentacja elektrotechniczna,
DIN EN 61293 oznaczanie sprzętu elektrycznego,
9.3.3 Schematy obwodów elektrycznych
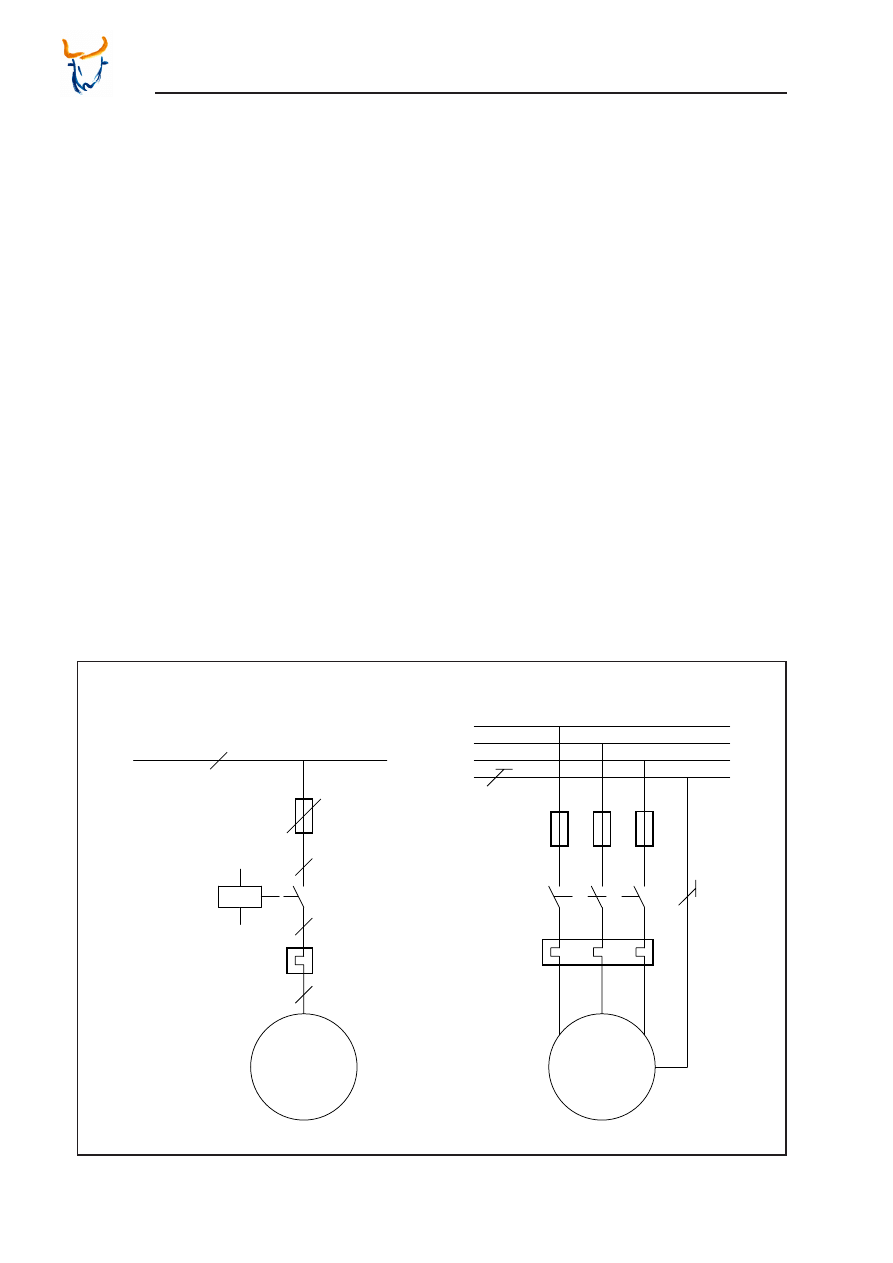
Systemy i funkcje mechatroniczne - Podręcznik
178
Minos
Schemat przepływu prądu jest szczegółową reprezentacją obwodu.
Wyjaśnia on jego funkcjonowanie.
Obwód jest podzielony na ścieżki prądu. Reprezentowane są one jako
wszystkie linie i połączenia. Rzeczywiste położenie urządzeń elektryc-
znych nie jest brane pod uwagę. Dla dużych urządzeń, schemat przepływu
prądu jest podzielony na główny obwód i na obwód sterowania. Oba te
schematy mogą zostać połączone w przypadku małych urządzeń.
Schemat przepływu prądu zawiera poziome linie napięcia i pionowe
ścieżki prądu. Wszystkie elementy przełączające są przedstawiane w
stanie bez napięcia.
Automatyczne przełączniki kontaktowe, takie jak krańcówki, przed-
stawiane są w swoim stanie początkowym odnośnie całego urządzenia.
Jakiekolwiek odstępstwa od typowego sposobu przedstawiania, powinny
być zaznaczone na schemacie przepływu prądu.
Wszystkie symbole graficzne powinny być ułożone pionowo, uwzględniając
kierunek przepływu prądu z góry w dół. Kierunek ruchu na symbolu grafic-
znym to zawsze z lewa na prawo.
Oznaczenie terminala powinno być zawsze umiejscowione na lewo od
symbolu.
Rys. 9.15: Uproszczony schemat układu i schemat obwodu dla silnika trójfazowego
400 VAC 50 Hz
L1
L2
L3
PE
-F1...F3
-K1
-F4
-M1
M
3 AC
3
-F1...F3
-F4
-M1
M
3 AC
-K1
3
3
3
3
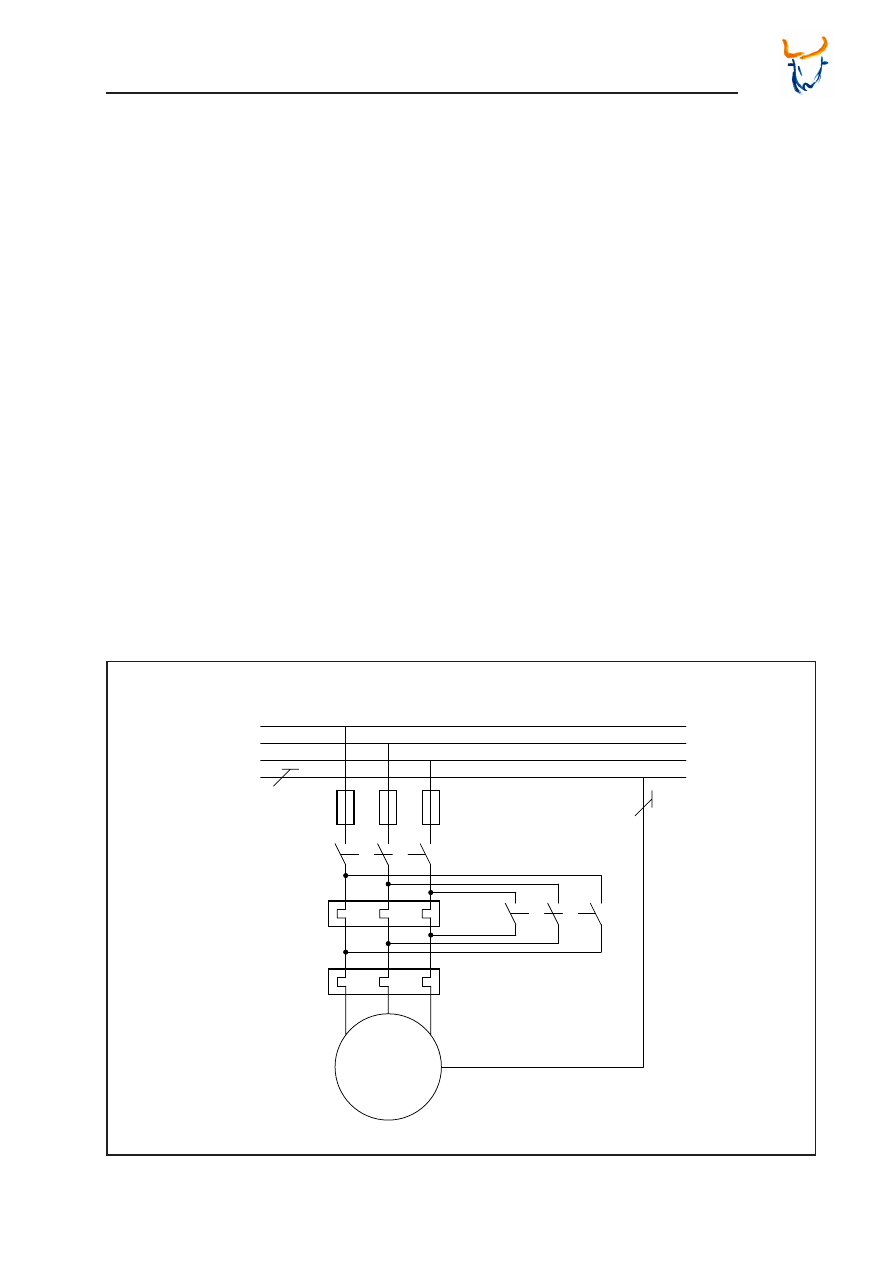
Systemy i funkcje mechatroniczne - Podręcznik
179
Minos
Jednym z wymagań dla napędu wiertarki jest możliwość prostej regulacji
prędkości obrotowej. Może to zostać zaimplementowane za pomocą
trójfazowego silnika asynchronicznego z przekładnią.
Silnik asynchroniczy ma sposób podłączenia typu “trójkąt”. Musi on
startować pod obciążeniem przekładni. Dlatego też należy dodatkowo
rozważyć projekt techniczny podłączeń silnika.
Podczas startu obciążonego silnika, zbyt długi czas rozruchu może
uruchomić jego przekaźnik ochronny, który jest podłączony do nominalnej
linii zasilania, wyłączając go już w fazie startu.
Aby zapewnić wystarczającą ochronę silnika, który startuje pod
obciążeniem, drugi przekaźnik zabezpieczający jest podłączony szere-
gowo. Jest tak ustawiony, aby nie został aktywowany podczas rozruchu,
lecz jedynie podczas awarii funkcjonowania, takiej jak zablokowanie
wirnika. Wtedy natychmiast wyłączy zasilanie.
Podczas rozruchu, przekaźnik podłączony do głównej linii prądu jest zwi-
erany za pomocą stycznika K2. Po tym, jak minie czas rozruchu, stycznik
zostanie rozłączony za pomocą przekaźnika czasowego.
400 VAC 50 Hz
L1
L2
L3
PE
-F1...F3
-K1
-F4
-M1
M
3 AC
-F5
-K2
Rys. 9.16: Mostkowanie wyłącznika ochronnego silnika podczas rozruchu
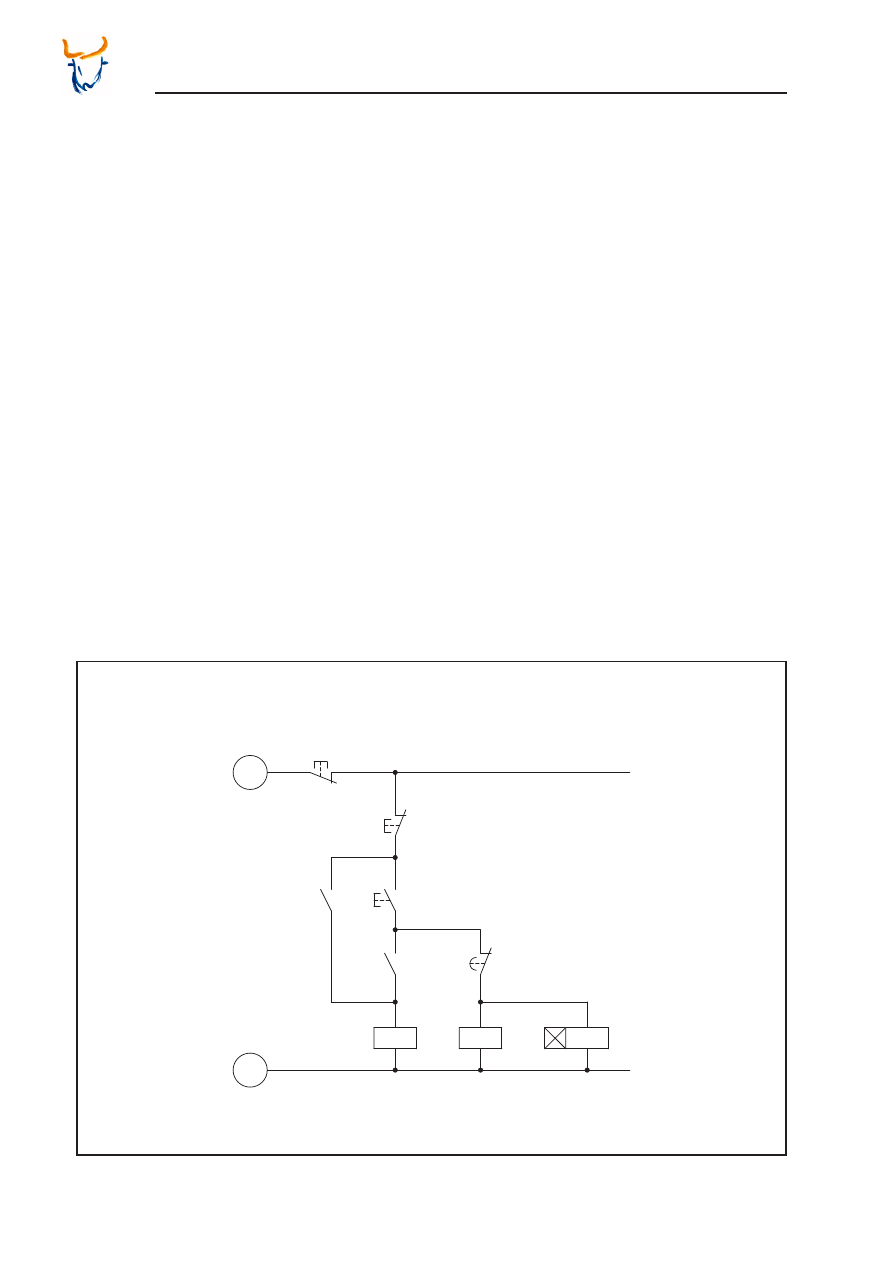
Systemy i funkcje mechatroniczne - Podręcznik
180
Minos
Kolejny schemat obwodu jest wymagany dla funkcji styczników. Styczniki
pracują przy napięciu 24 V DC. Przełącznik S1 jest używany do odłączania
prądu we wszystkich ścieżkach w przypadku niebezpieczeństwa.
Silnik jest załączany poprzez wciśnięcie przycisku S3. Przycisk ten ak-
tywuje stycznik K2 i przekaźnik czasowy K3T. Gdy stycznik K2 zostanie
aktywowany, normalnie otwarty styk K2 załącza stycznik K1.
Stycznik K1 jest załczony i jest podtrzymywany przez styk K1. Gdy
przycisk S3 zostanie zwolniony, K2 i K3T zostają włączone, ponieważ
napięcie wciąż jest na nie podawane przez normalnie otwarty styk K1,
normalnie otwarty styk K2 i normalnie zamknięty styk K3T.
Stycznik K1 włącza silnik. Przekaźnik czasowy i K2 zostają wyłączone
po 3 s przez normalnie zamknięty styk K3T. Wyłącza to mostek nad
wyłącznikiem bezpieczeństwa na czas rozruchu.
Gdy przycisk S2 zostaje wciśnięty, obwód sterowania zostaje przerwany.
Stycznik K1 zostaje zdezaktywowany i silnik zostaje wyłączony.
Rys. 9.17: Schemat obwodu rozruchu obciążonego silnika
0V
24V
-S1
-S2
-K1
-S3
-K1
-K2
-K3T
-K2
-K3T
emergency stop
AUS
EIN
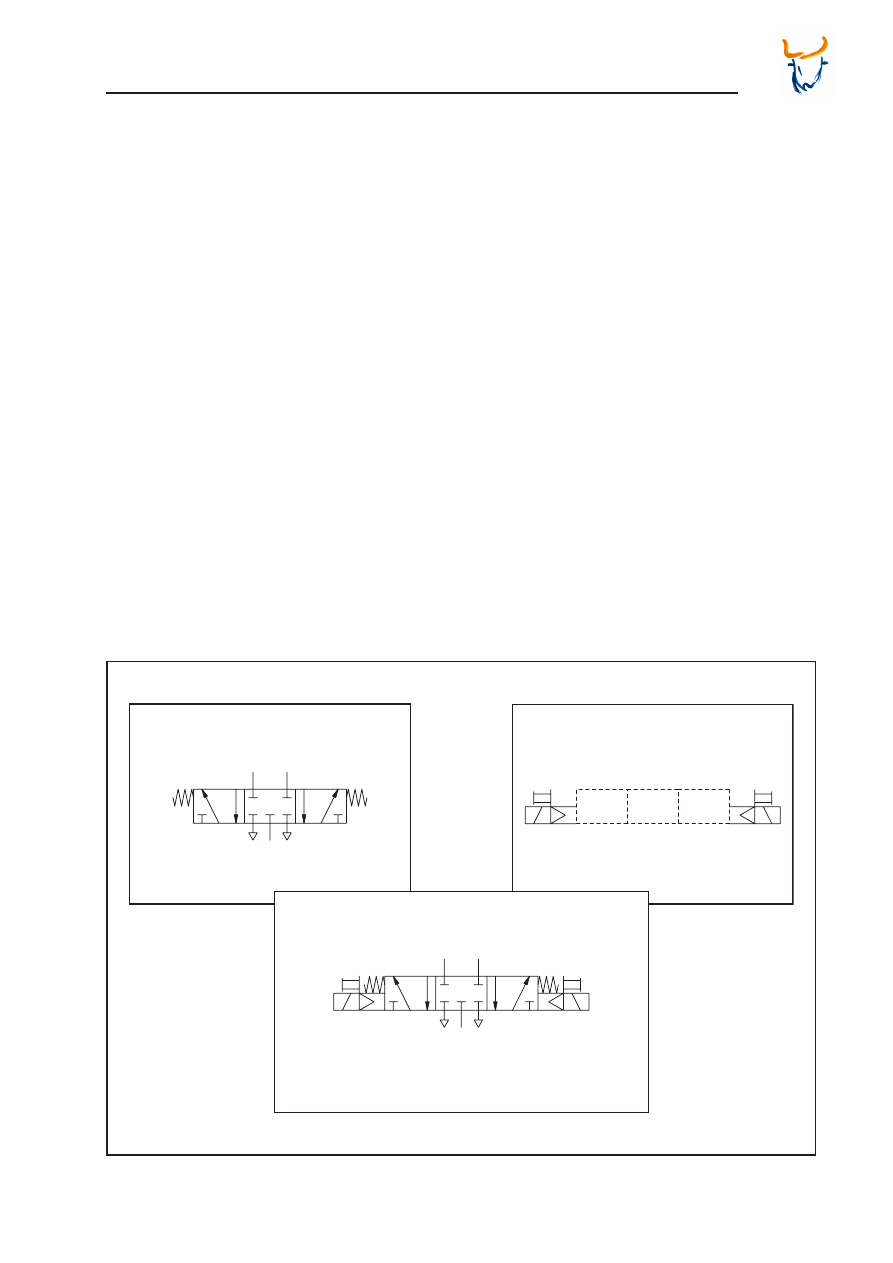
Systemy i funkcje mechatroniczne - Podręcznik
181
Minos
Przed zrealizowaniem złożonego sterowania, dysponujemy paroma
schematami podłączeń dla osobnych funkcji układu:
– pneumatyczny schemat działania dla mocowania,
– hydrauliczny schemat działania dla posuwu wiertarki,
– obwód główny i obwód sterowania silnika i realizacja różnych
prędkości wiercenia.
Podział ten posiada następujące wady:
– urządzenia nie mogą być wspólnie sterowane sterownikiem PLC,
– podsystemy nie mogą zostać połączone, ponieważ wymagane są
różne źródła energii do przetwarzania sygnałów,
– nie jest możliwa praca automatyczna, jedynie ręczna.
Dlatego, aby zrealizować złożone sterowanie, poniższe cele powinny
zostać osiągnięte:
– wcześniej wspomniane wady należy usunąć,
– zalety hydrauliki, pneumatyki i elektroniki muszą zostać połączone.
9.4
Realizowanie złożonego sterowania
Rys. 9.18: Zasada “elektropneumatyki” w systemie złożonym
Elektro-pneumatyczny
system złożony
rozdzielacz typu 5/3, sprężynowe centrowanie,
dwustronne elektromagnetyczne sterowanie,
sterowanie pilotowe z uzupełniającym ręcznym
System pneumatyczny
rozdzielacz typu 5/3
System elektryczny
elektromagnes
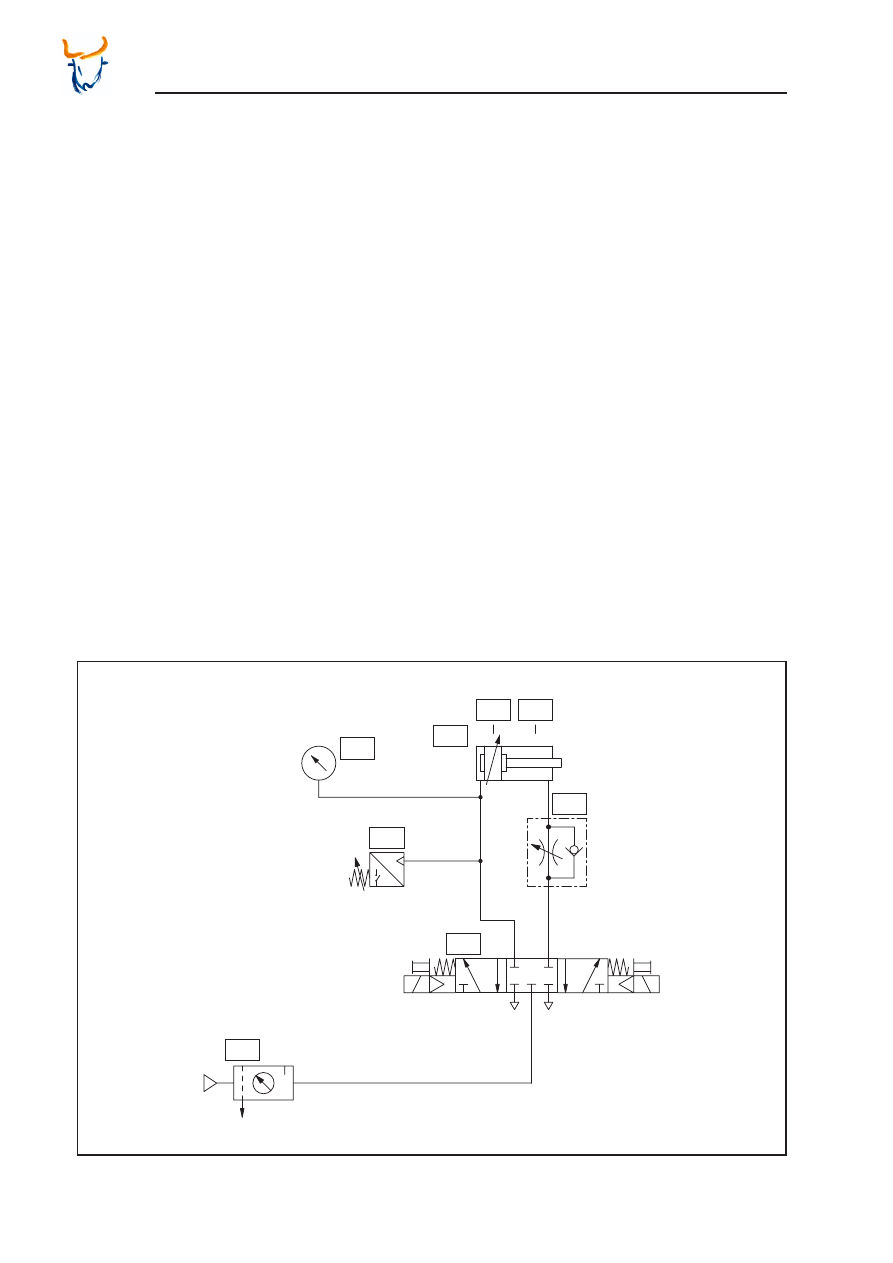
Systemy i funkcje mechatroniczne - Podręcznik
182
Minos
Aby usunąć wady mocowania za pomocą pneumatyki, kombinacja
pneuatycznych i elektrycznych systemów jest wymagana do stworzenia
podstawowego złożonego systemu elektropneumatycznego.
Parę komponentów powinno zostać wymienionych aby zapewnić
sterowalność elektryczną. Dlatego też, sterowany elektromagnetycznie
rozdzielacz typu 5/3 powinien zostać użyty jako element obsługujący
siłownik. Sprężynowe centrowanie zostaje zachowane.
Każda z przełączanych pozycji może zostać wybrana poprzez włączenie
odpowiedniej cewki elektromagnetycznej. Gdy żadna cewka nie jest
aktywna, rozdzielacz przyjmuje pozycję środkową.
Inne komponenty także powinny zostać wymienione. Przetwornik
pneumatyczno-elektryczny z oznaczeniem B6 powinien zostać użyty
do monitorowania siły mocowania, zamiast zaworu przelewowego. Ten
przełącznik ciśnienia ma ustawianą siłę sprężyny i generuje sygnał gdy
ustawione ciśnienie zostało osiągnięte.
Ze sterowaniem elektrycznym rozdzielacza typu 5/3, nie ma potrzeby
stosować ręcznie sterowanych elementów sygnałowych, czyli rozdzie-
laczy typu 3/2. Jednak oba te rozdzielacze użyte są jako sterowanie
pilotowe rozdzialaczy 5/3.
Rys. 9.19: Elektropneumatyczny schemat działania
1A
0Z
1V1
1V2
1Z1
B6
B1
B2
Y1
Y2
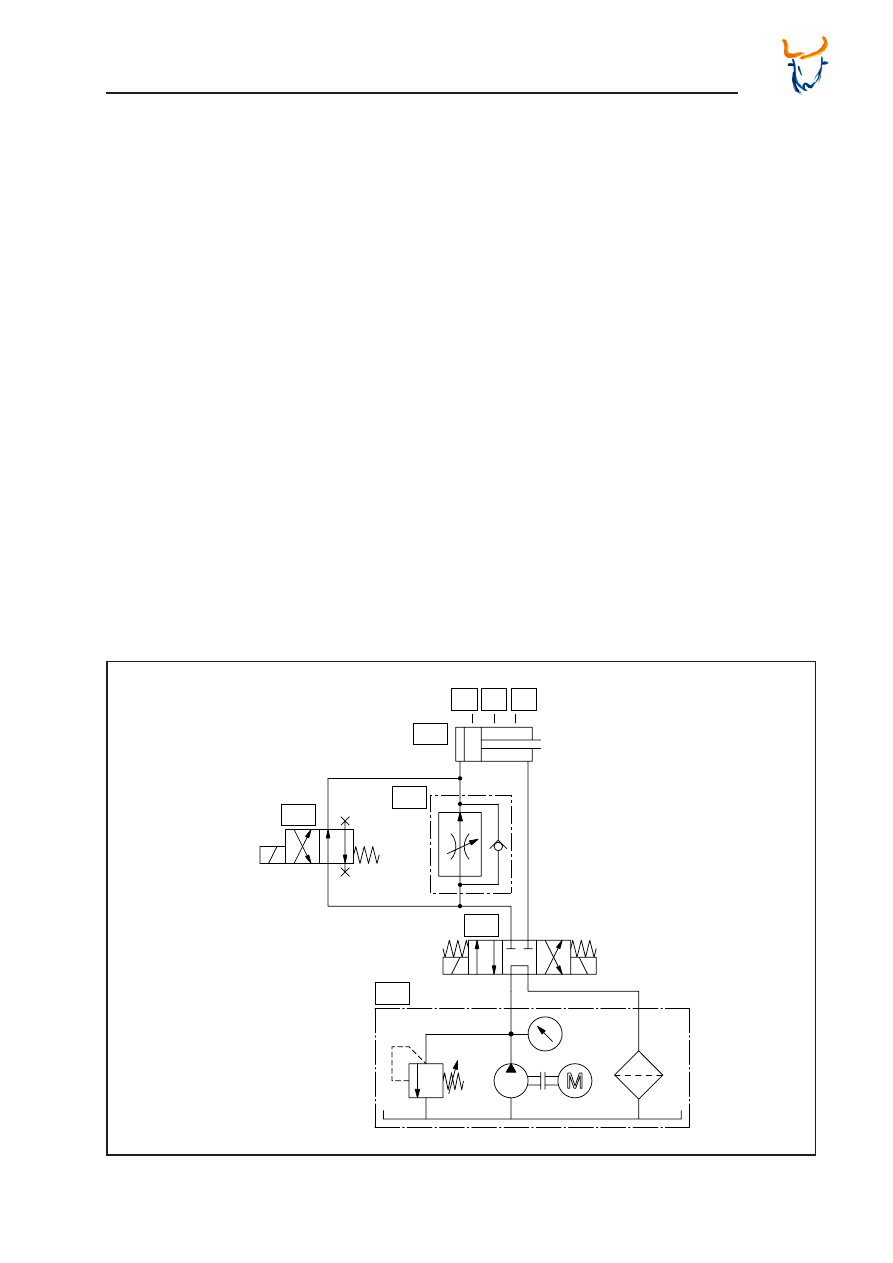
Systemy i funkcje mechatroniczne - Podręcznik
183
Minos
Analogicznie do kombinacji pneumatyki i elektroniki, której rezultatem
jest elektropneumatyka, elementy hydrauliczne do posuwu zostają
połączone ze sterowaniem elektrycznym, z czego wynikają elementy
elektrohydrauliczne.
Rozdzielacz typu 4/3 powinien być sterowany elektrycznie. Przełączanie
z ruchu szybkiego na ruch roboczy przy pomocy rozdzielacza 2/2 musi
także być wykonywane za pomocą rozdzielacza sterowanego elektryc-
znie.
Rozdzielacze typu 2/2 są praktycznie niedostępne na rynku, zatem
rozdzielacze 4/2 mogą być użyte jako zamienniki. Nieużywane ścieżki
zostaną zamknięte za pomocą zatyczek.
Ponieważ cewki elektromagnetyczne rozdzielacza pneumatycznego
zostały już oznaczone jako Y1 i Y2, cewki rozdzielacza 4/3 powinny zostać
oznaczone jako Y3 i Y4. Cewka elektromagnetyczna odpowiedzialna za
przełączanie prędkości jest oznaczona symbolem Y5.
Rys. 9.20: Elektrohydrauliczny schemat działania
M
0Z1
1V1
1V3
1V2
1A
B3
B5
B4
Y3
Y4
Y5

Systemy i funkcje mechatroniczne - Podręcznik
184
Minos
Osobne schematy obwodów najpierw łączone są razem ze względu na
sterowanie przekaźnikowe. Schemat przepływu prądu stworzony dla
obwodu sterowania złożonego systemu może zostać użyty jako baza
przy programowaniu sterownika PLC. Jednak, program PLC może zostać
stworzony bez wcześniejszego tworzenia schematu przepływu prądu.
Aby połączyć oddzielne operacje i funkcje podsystemów, potrzebne są
urządzenia zdolne do odbierania i odpowiednio przekazywania dalej
sygnałów. Urządzeniami tymi są czujniki.
Różne typy czujników są odpowiednie i mogą zostać użyte do ustalania
pozycji siłowników, tak jak wymaga nasz przykład.
Kontaktronowe czujniki zbliżeniowe zostały dobrane do siłownika
pneumatycznego jako magnetyczne czujniki krańcowe. Należą one do
najczęściej używanych i najlepiej znanych krańcówek siłowników.
Indukcyjne czujniki zbliżeniowe są także odpowiednie do sygnalizowania
położenia tłoka. Używa się ich w przypadku siłowników hydraulicznych.
Krzywki na tłoczysku powinny być wykonane z metalu, ponieważ induk-
cyjne czujniki zbliżeniowe mogą wykrywać jedynie materiały przewodzące
prąd.
Ciśnienie mocowania jest monitorowane za pomocą czujnika ciśnienia.
Następujące oznaczenia zostały przyporządkowane czujnikom:
B1 pozycja krańcowa wsunięta, mocowanie za pomocą siłownika
pneumatycznego,
B2 pozycja krańcowa wysunięta, mocowanie za pomocą siłownika
pneumatycznego,
B3 pozycja krańcowa wsunięta, posuw za pomcą siłownika hydrau-
licznego,
B4 pozycja przełączenia z ruchu szybkiego na ruch roboczy,
B5 pozycja krańcowa wysunięta, posuw za pomocą siłownika hy-
draulicznego,
B6 czujnik ciśnienia, monitorowanie siły mocowania.
Kombinacja elementów strukturalnych za pomocą czujników może być
także opisana schematem funkcji.
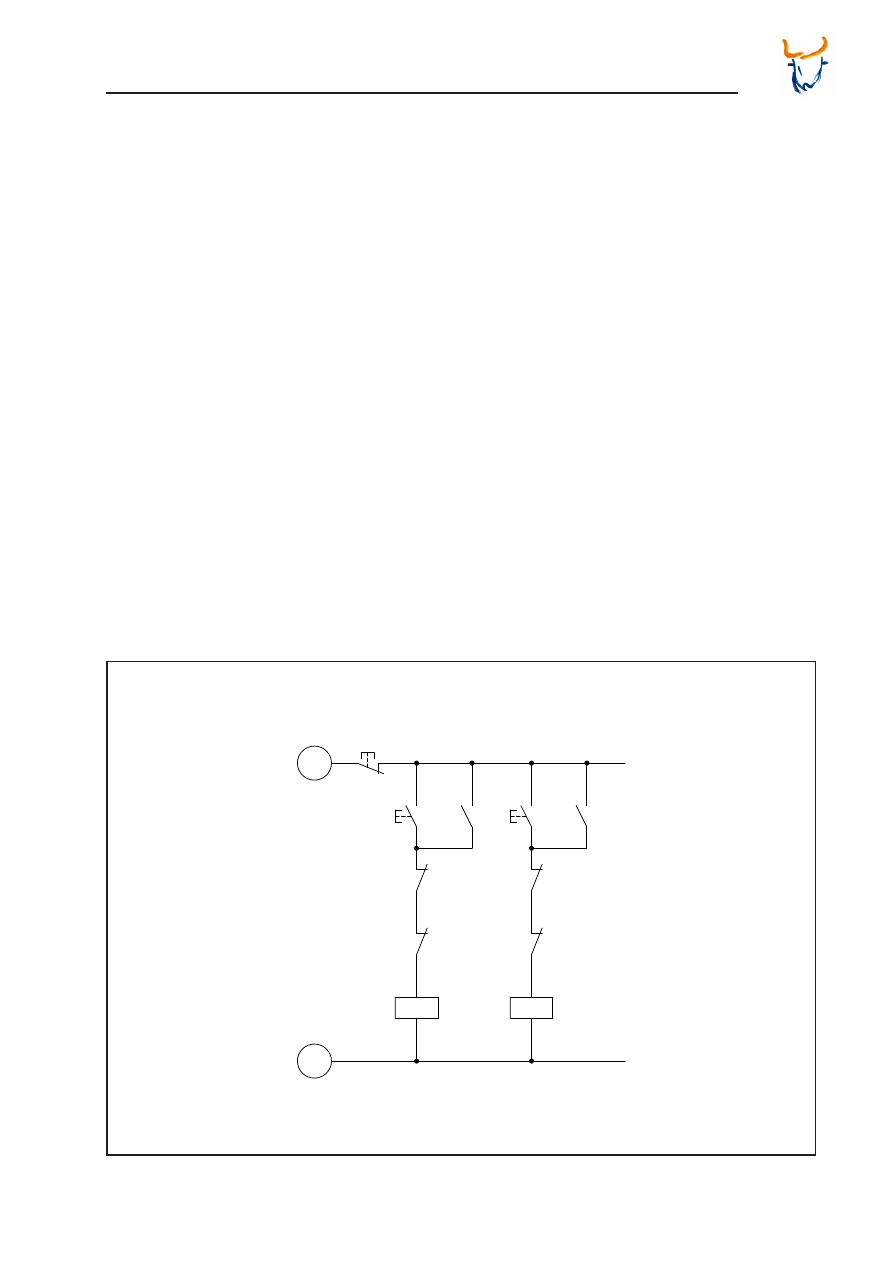
Systemy i funkcje mechatroniczne - Podręcznik
185
Minos
Proces przedstawiony na przykładzie składa się z paru kroków, które są
wykonywane jeden za drugim. Odpowiednio, tworzenie systemu sterow-
ania jest wykonywane w kilku krokach.
Krok 1: Wybór prędkości obrotowej
Sterowanie działa przy napięciu 24 V DC. Przycisk S0 jest użyty jako
wyłącznik awaryjny. Aktywowanie tego przycisku odcina dopływ prądu
do całego systemu sterowania.
Robocza prędkość obrotowa wiertarki jest ustawiana za pomocą przy-
cisków S2 i S3 zanim proces zostanie rozpoczęty. Wybrana prędkość jest
sygnalizwana w części zasilania przy pomocy dwóch żarówek :
H 1 prędkość n
1
= 750 min
-1
niska prędkość
H 2 prędkość n
2
= 1450 min
-1
wysoka prędkość
Każdy z przycisków załącza przekaźnik. Dodatkowa para styków
przekaźników jest wykorzystana do podtrzymania stanu załączonego
po zwolnieniu przycisku. Normalnie zwarty styk jest podłączony do
linii prądowej drugiego przekaźnika aby zapobiec załączeniu obu
przekaźników na raz.
Normalnie zwarty styk jest użyty do kasowania i samo-blokowania. Rodzaj
użytego przekaźnika nie został jeszcze ustalony.
Rys. 9.21: Wybór prędkości obrotowej
0V
24V
-S2
-K11
-K12
-K11
S0
-S3
-K12
-K11
-K12
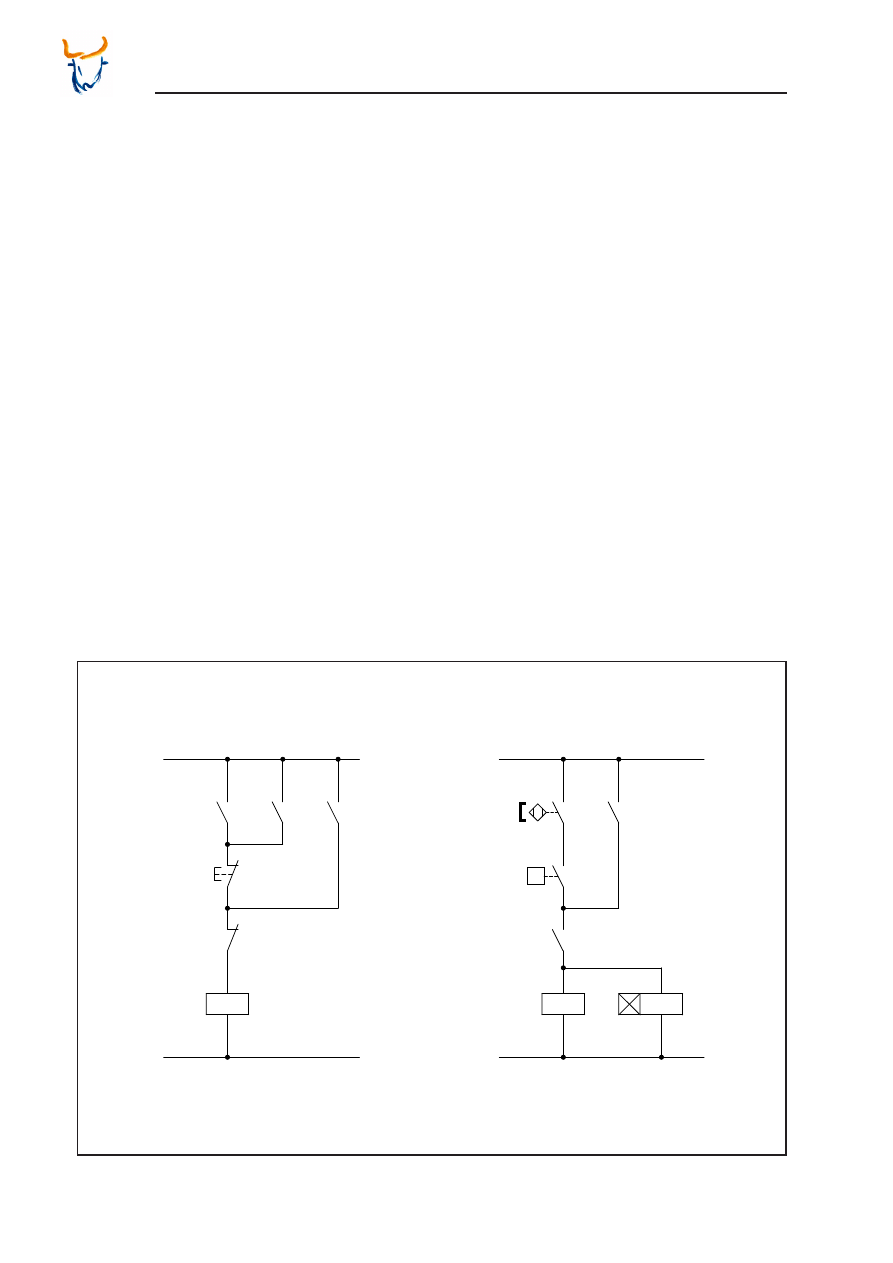
Systemy i funkcje mechatroniczne - Podręcznik
186
Minos
Rys. 9.22: Mocowanie i załączanie silnika, posuw wiertarki
Krok 2: Start i mocowanie tarczy bębna liny
Po wyborze prędkości obrotowej poprzez załączenie jednego z
przekaźników K11 i K12, proces może zostać rozpoczęty przy użyciu
przycisku S1.
Przekaźnik K13 pozostaje załączony dzięki mechanizmowi samoblokow-
ania się jego styków, po wciśnięciu przycisku startu. W tym samym czasie,
kolejny styk tego przekaźnika załącza cewkę elektromagnetyczą rozdzie-
lacza siłownika pneumatycznego odpowiedzialnego za mocowanie.
Samoblokowanie może zostać skasowane za pomocą styku normalnie
zwartego. W tej fazie rozwoju nie jest jeszcze możliwe zdefiniowanie
przekaźników, do których styki te będą należały.
Krok 3: Posuw z ruchem szybkim i załączanie silnika
Gdy siłownik mocujący osiągnie swoją wysuniętą pozycję krańcową
B2 i czujnik ciśnienia B6 wskaże wystarczające ciśnienie mocujące,
przekaźnik K14 i przekaźnik czasowy K15 zostają załączone. Przekaźnik
czasowy wyłączy przekaźnik K2 po 3 s i drugie zabezpieczenie silnika
zostanie załączone.
Trzeci krok może być zrealizowany jedynie po tym, jak przekaźnik K13
został załączony w kroku drugim.
-K11
-K13
-S1
-K12
-K13
-B2
-K14
-K13
-B6
-K14
-KT15
P
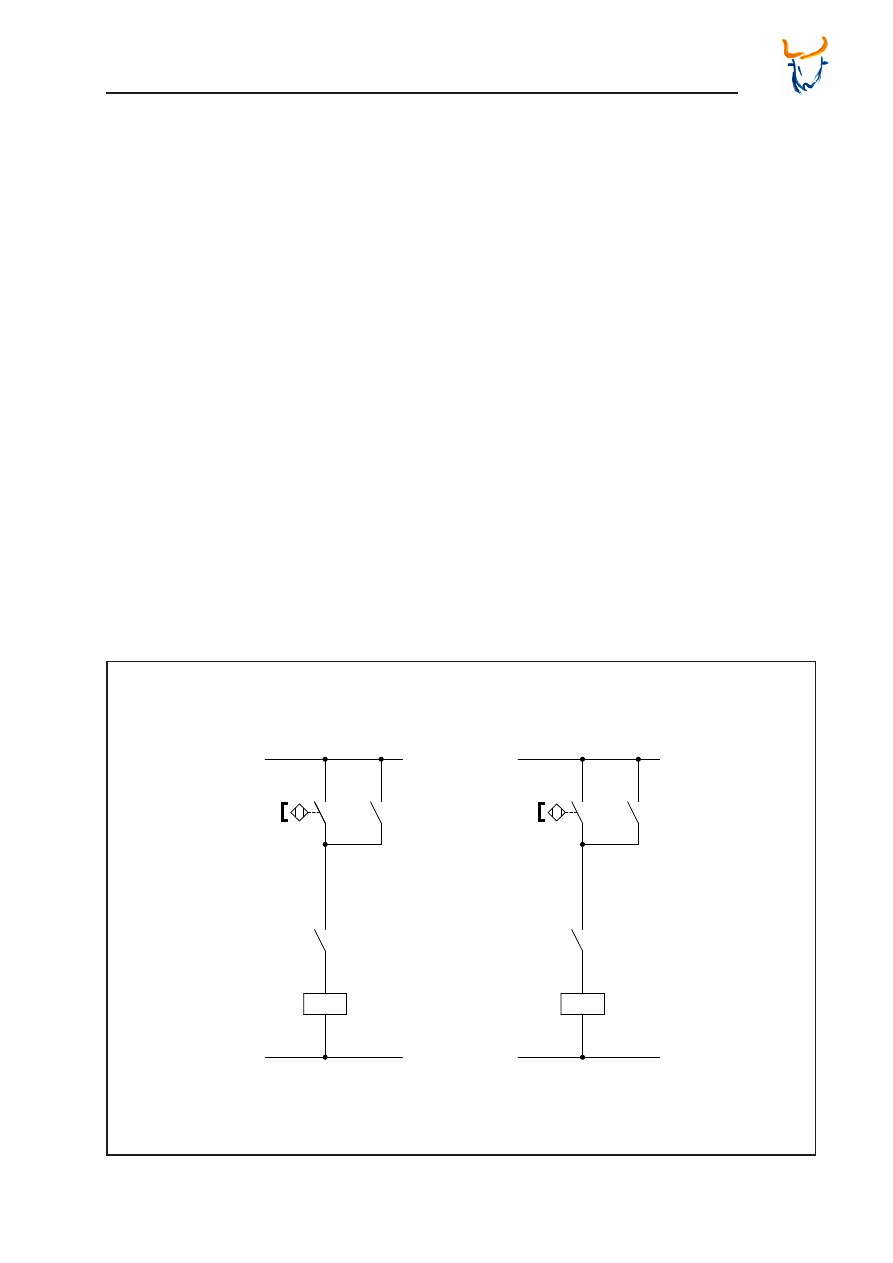
Systemy i funkcje mechatroniczne - Podręcznik
187
Minos
Krok 4: Wyłączanie ruchu szybkiego posuwu
Hydrauliczny siłownik posuwu wysuwa się z dużą prędkością. Po
osiągnięciu przełącznika B4, rozdzielacz używany do ominięcia zaworu
dławiącego zostanie przełączony. Spowoduje do przepływ cieczy hydrau-
licznej do siłownika jedynie przez zawór dławiący, ograniczając prędkość
pracy do wartości ustawionej.
Prędkość może zostać zmieniona jedynie gdy posuw i silnik są załączone,
a przekaźnik K14 jest aktywny.
Krok 5: Wsuw siłownika posuwu
Po tym, gdy siłownik posuwu osiągnie swoją wysuniętą pozycję krańcową,
przełącznik krańcowy B5 zostanie aktywowany i rozdzielacz siłownika
hydraulicznego zostanie przesterowany na pozycję odwrotną.
Ten krok może być wykonany jedynie, gdy przekaźnik K16 jest załączony
i poprzedni krok został ukończony.
Rys. 9.23: Wyłączenie ruchu szybkiego i rozpoczęcie wsuwu
-K16
-K14
-K16
-B4
-B5
-K17
-K16
-K17
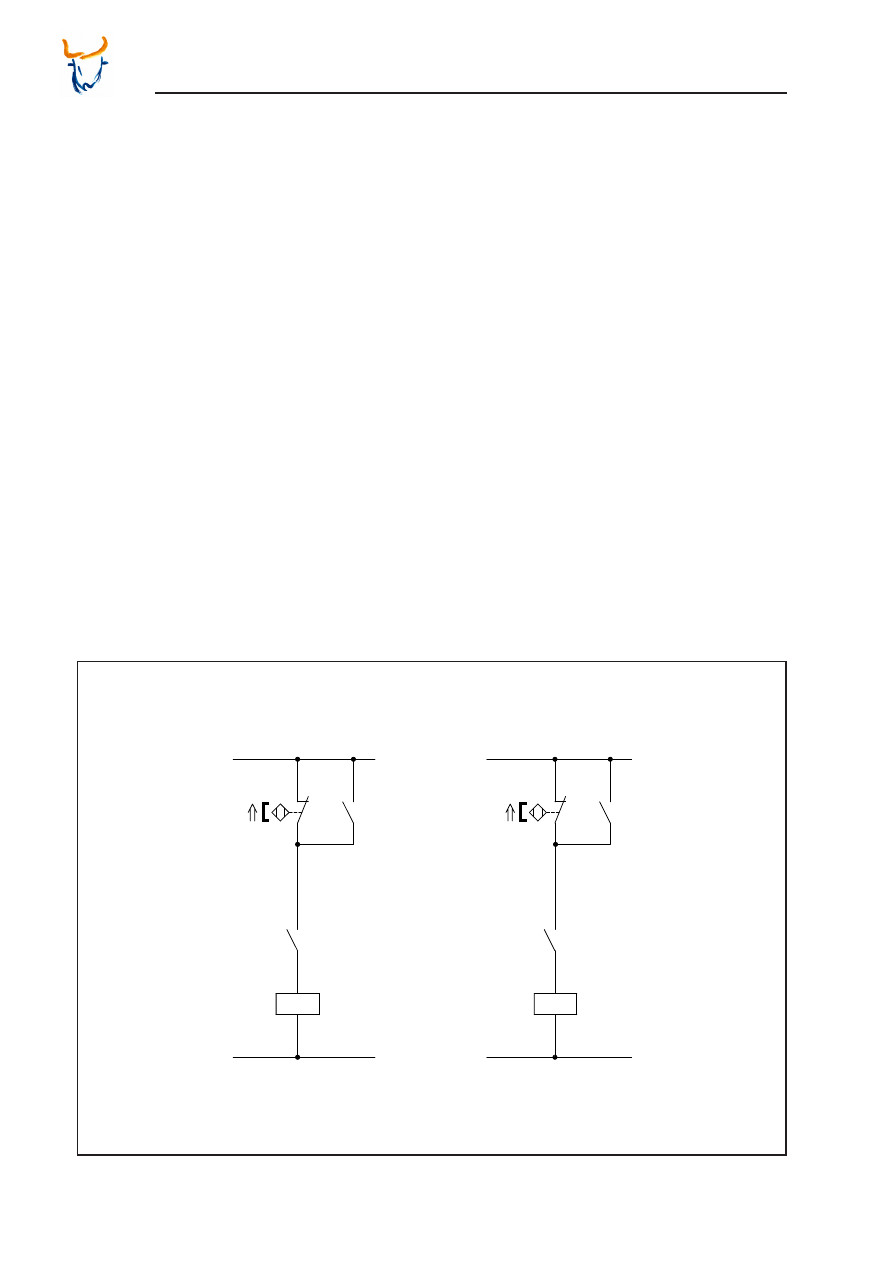
Systemy i funkcje mechatroniczne - Podręcznik
188
Minos
Rys. 9.24: Wyłączanie silnika, zatrzymywanie mocowania i przygotowanie do ponownego startu
Krok 6: Wyłączanie silnika i wsuw siłownika mocującego
Gdy siłownik posuwu ponownie osiągnie swoją wsuniętą pozycję
krańcową, przełącznik krańcowy B3 zostanie aktywowany. Ten przełącznik
powinien być przedstawiony jako aktywny na schemacie, ponieważ taki
jest jego stan w pozycji startowej obwodu. Oznacza się to za pomocą
strzałki na lewo od symbolu. Ten normalnie otwarty styk jest także oznac-
zany zgodnie z jego stanu aktywacji.
Z jednej strony, przekaźnik K18 wyłącza silnik. Z drugiej strony, przełącza
rozdzielacz pneumatycznego siłownika mocującego, powodując jego
wsuw do pozycji startowej.
Krok 7: Sygnalizacja zakończenia procesu
Przekaźnik K19 jest załączany, gdy pneumatyczny siłownik mocujący
osiągnie swoją wsuniętą pozycję krańcową. Przełącznik krańcowy B1
także jest włączony w pozycji startowej, co powinno zostać odpowiednio
oznaczone na schemacie.
Przekaźnik K19 najpierw kasuje samoblokowanie się przekaźnika wyboru
prędkości obrotowej K11 lub K12. W tym samym momencie wyłącza
przekaźnik K13, który został włączony przez przycisk startu. To oznac-
zenie odpowiadających sobie styków powinno zostać wykonane dla
pierwszych dwóch kroków.
-K18
-K17
-K18
-B3
-K19
-K18
-K19
-B1
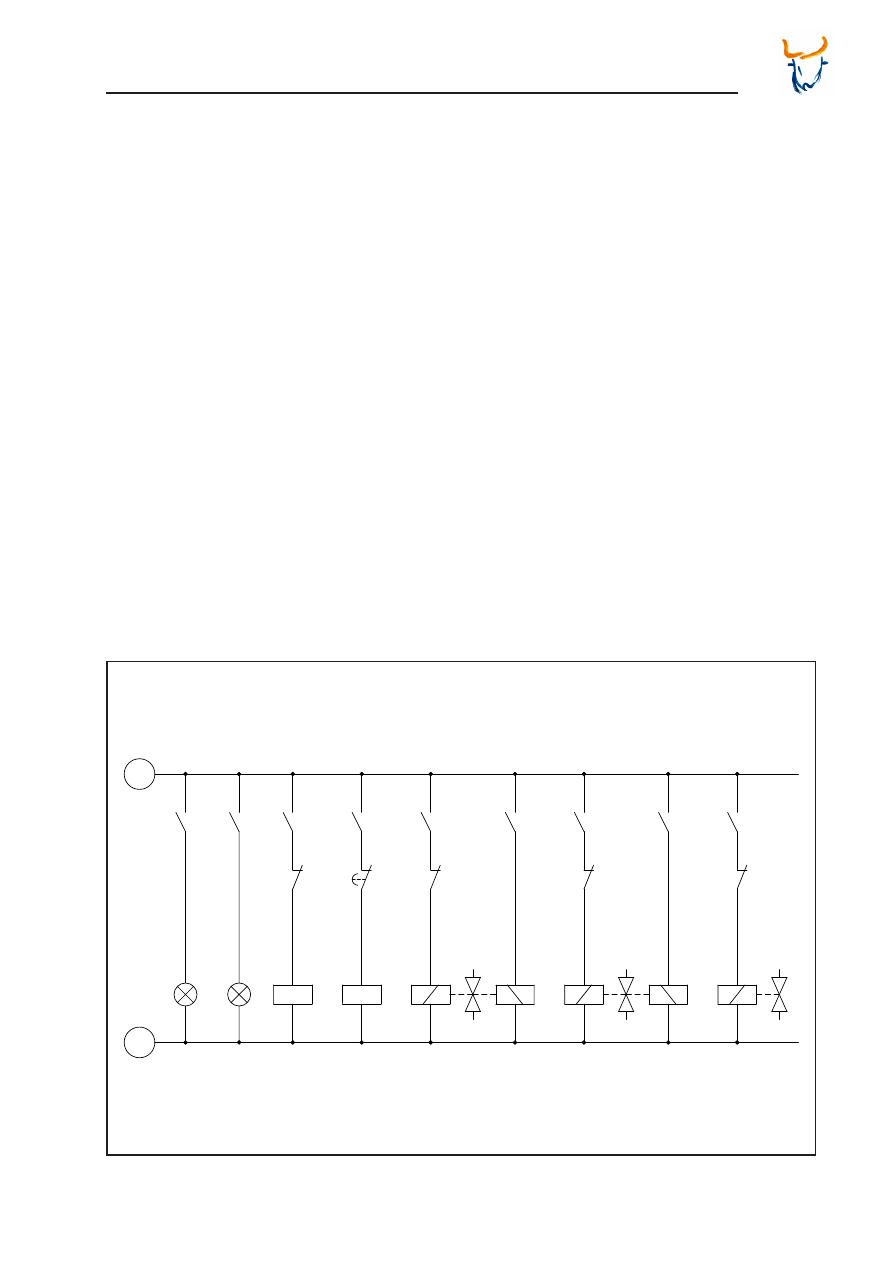
Systemy i funkcje mechatroniczne - Podręcznik
189
Minos
0V
24V
-H1
-K11
-H2
-K12
-K1
-K2
-K14
-K14
-K18
-KT15
-K13
-K18
-Y1
-K18
-Y2
-K14
-K17
-Y3
-K17
-Y4
-K16
-K17
-Y5
Rys. 9.25: Obwód główny
Wyłączanie przekaźnika K13 skasuje kroki jeden za drugim. Dlatego też,
obwód będzie gotowy do kolejnego startu.
Część mocy tego obwodu zawiera wyjście sygnałowe przekaźników. Tu,
dwie żarówki wskazują, która prędkość obrotowa została wybrana.
Przekaźnik K1 załącza silnik elektryczny. Przekaźnik K2 użyty jest do
ominięcia wyłącznika ochronnego silnika, i jest wyłączany po upłynięciu
czasu opóźnienia.
Ponieważ każdy z rozdzielaczy obu siłowników posiada po dwie cewki
elektromagnetyczne, jedna z cewek musi być wyłączona, aby włączyć
drugą. Zapewniane jest to poprzez normalnie zwarte styki na ścieżkach
prądowych cewek elektromagnetycznych Y1 i Y3.
Cewka elektromagnetyczna rozdzielacza używana do przełączania
prędkości, jest także wyłączana za pomocą normalnie zwartego styku,
kiedy siłownik jest całkowicie wysunięty.
Kompletny schemat obwodu części sterowania jest ukazany na następnej
stronie.
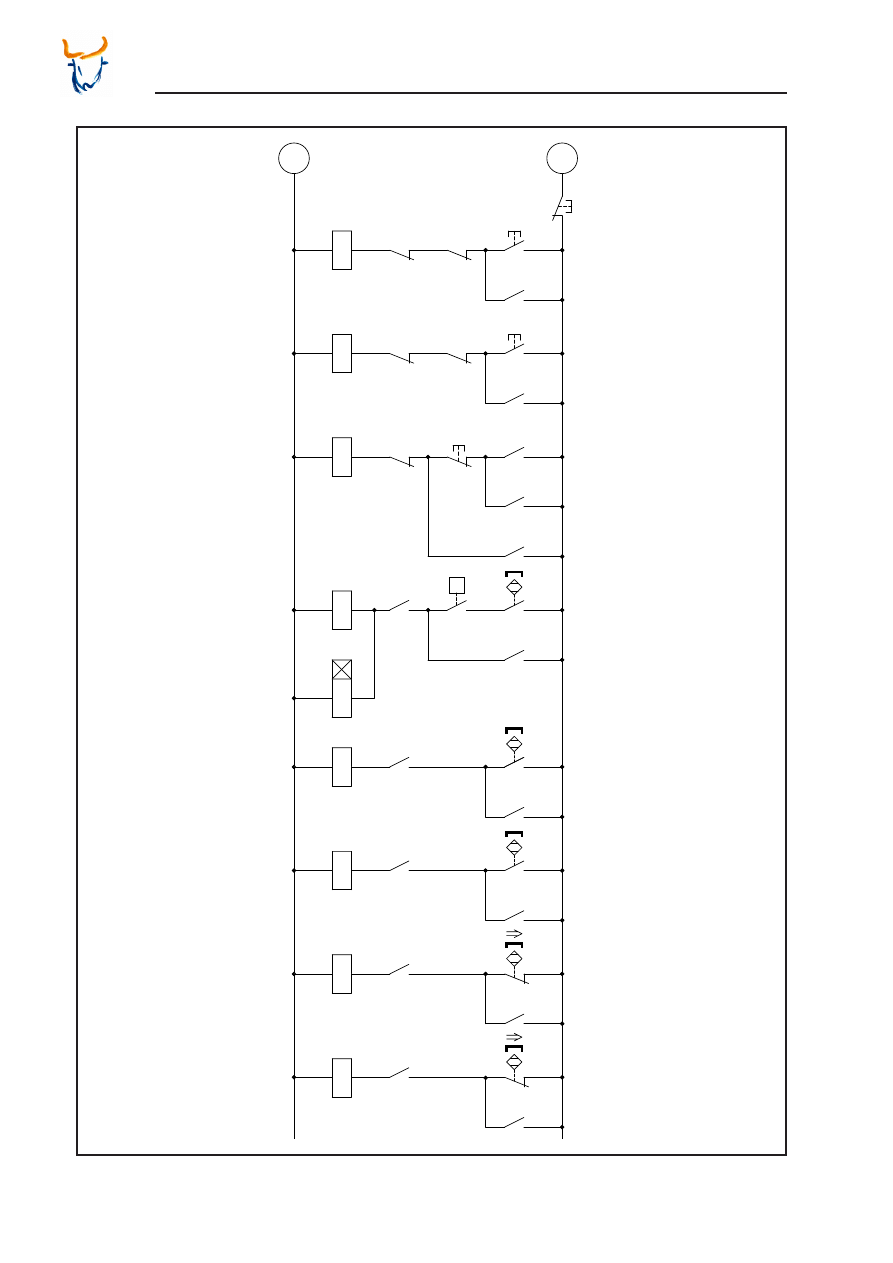
Systemy i funkcje mechatroniczne - Podręcznik
190
Minos
0V
24
V
-S2
-K1
1
-K1
9
-K1
2
-K1
1
S0
-S3
-K1
2
-K1
9
-K1
1
-K1
2
-K1
1
-K1
3
-K1
9
-S1
-K1
2
-K13
-B2
-K14
-K1
3
-B6
-K1
4
-K1
6
-K1
4
-K1
6
-B5
-K1
7
-K1
6
-K17
-K1
8
-K1
7
-K1
8
-K1
9
-K1
8
-K1
9
-KT15
P
-B4
-B3
-B1
Rys. 9.26: Obwód sterowania

Systemy i funkcje mechatroniczne - Podręcznik
191
Minos
Sterownik PLC może zostać dobrany do procesu sterowania w celu
połączenia osobnych podsystemów. Różne języki programowania mogą
być użyte do tworzenia programu PLC. Ponieważ system sterowania jest
już przedstawiony na schemacie przepływu prądu, poprawnym wyborem
jest schemat drabinkowy.
Aby rozpocząć programowanie, należy stworzyć tabelę zawierającą
wszystkie wejścia i wyjścia. Tabela jest także nazywana tabelą deklaracji.
Wejścia i wyjścia używane w przykładzie mogą zostać zadeklarowane
w następujący sposób:
Adres
Symbol
Komentarz
I0.0
S0
wyłącznik awaryjny
I0.1
S1
start
I0.2
S2
niska prędkość obrotowa
I0.3
S3
wysoka prędkość obrotowa
I0.4
I0.5
I0.6
I0.7
I1.0
B1
wsunięta krańcówka, sił. mocowania
I1.1
B2
wysunięta krańcówka, sił. mocowania
I1.2
B3
wsunięta krańcówka, siłownik posuwu
I1.3
B4
ruch szybki/ruch roboczy, sił. posuwu
I1.4
B5
wysunięta krańcówka, siłownik posuwu
I1.5
I1.6
B6
czujnik siły
I1.7
Q0.0
Q0.1
Y1
wysuw siłownika mocującego
Q0.2
Y2
wsuw siłownika mocującego
Q0.3
Y3
wysuw siłownika posuwu
Q0.4
Y4
wsuw siłownika posuwu
Q0.5
Y5
wolny posuw
Q0.6
Q0.7
Q1.0
Q1.1
K1
zabezpieczenie silnika
Q1.2
K2
ominięcie zabezpieczenia silnika
Q1.3
Q1.4
H1
sygnalizacja wolnej prędkości
Q1.5
H2
sygnalizacja wysokiej prędkości
Q1.6
Q1.7
Można teraz przejść do programowania w zależności od posiadanego
rodzaju sterownika PLC.

Systemy i funkcje mechatroniczne - Podręcznik
192
Minos
Wyszukiwarka
Podobne podstrony:
5 Czujniki Podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
7 Podrecznik PL
6 Podrecznik1 PL
8 Podrecznik PL
2 1Sozial podrecznik PL
APQP Podręcznik PL APQP 2
2 2Projet podrecznik PL
5 Czujniki Podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
PODRĘCZNIK UŻYTKOWNIKA PL
PC 1200 Podręcznik Wzorcowy 3D PL
więcej podobnych podstron