Sieci wymiany danych
Z
Elektronika
Instrukcja
do
laboratorium
Ćw. 5
dr inż. Leszek Jarzębowicz
dr inż. Mirosław Mizan
Katedra Inżynierii Elektrycznej
Transportu
Gdańsk, 2012
Przetworniki elektroniczne
do pomiaru wielkości
mechanicznych: akcelerometr,
czujnik żyroskopowy, tensometr

2
Elektronika
CEL ĆWICZENIA
• zapoznanie się z budową i zasadą działania akcelerometru,
• zapoznanie się z budową i zasadą działania czujnika żyroskopowego,
• zapoznanie się z budową i zasadą działania tensometru.
1. WPROWADZENIE
Współczesne układy pomiaru wielkości mechanicznych powszechnie wykorzystują
przetworniki elektroniczne, zamieniające mierzoną wielkość mechaniczną – prędkość kątową,
przyspieszenie, siłę (naprężenie) – na wielkość elektryczną, z reguły w postaci analogowego
sygnału napięciowego lub prądowego.
Akcelerometry
Akcelerometry (przyspieszeniomierze) są czujnikami przetwarzającymi przyspiesze-
nie statyczne lub dynamiczne na sygnał elektryczny. Obecnie akcelerometry znalazły zasto-
sowanie w wielu dziedzinach. Są wykorzystywane między innymi w:
przemyśle – pomiary wibracji i udarów, diagnostyka łożysk, pomiary parametrów
ruchu maszyn i urządzeń, wykrywanie trzęsień ziemi,
przemyśle samochodowym – systemy kontroli trakcji, systemy bezpieczeństwa,
medycynie – monitoring czynności życiowych, protezy,
systemach alarmowych – czujniki ruchu,
systemach nawigacyjnych – pomiary położenia obiektów, GPS,
komputerach i telefonach – peryferia komputerowe, dyski optyczne, czujniki położenia.
Produkowane w postaci układów scalonych akcelerometry z reguły łączą w sobie
część mikromechaniczną z odpowiednim obwodem elektronicznym, który przetwarza sygnały
do odpowiedniej postaci wyjściowej. Jest to technologia określana nazwą MEMS (ang. Micro
Electro-Mechanical System). Przy ich budowie popularnych akcelerometrów wykorzystuje
się fakt, że wskutek przyspieszenia odpowiedniej masy pomiarowej, przymocowanej do sprę-
żystej membrany – zamocowanej sztywno na końcach, powstaje siła odkształcająca tę mem-
branę. W konstrukcjach czujników są wykorzystywane dwie podstawowe zasady fizyczne.
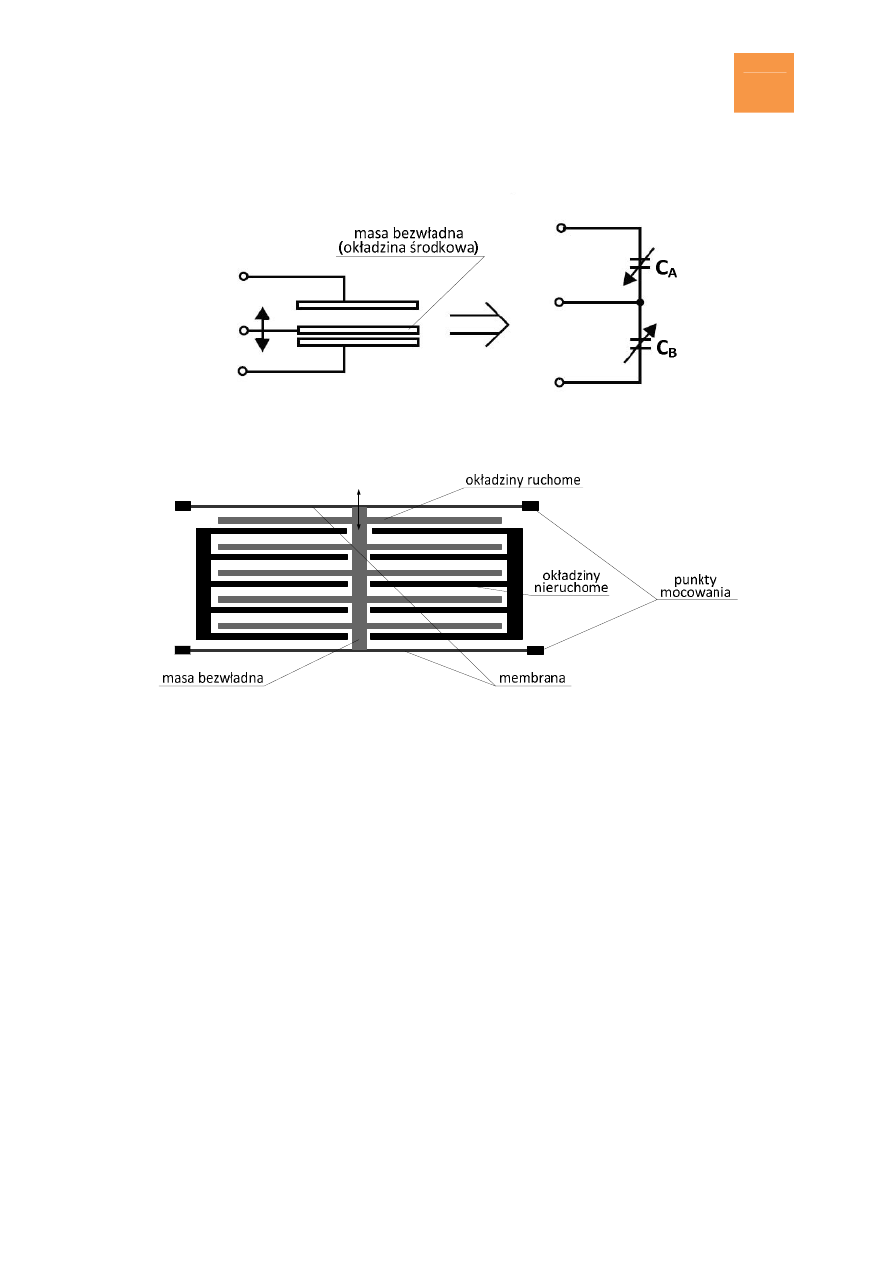
W akcelerometrach opartych na elementach piezorezystancyjnych wykorzystuje się
zmianę ich rezystancji wywołaną odkształceniem membrany. Częściej wykorzystuje się jed-
nak układy, w których masa pomiarowa o określonej bezwładności stanowi środkową okła-
dzinę (elektrodę) kondensatora różnicowego (lub jest z nią sztywno związana), jak przedsta-
wiono na rys. 1. W stanie spoczynku pojemności C
A
i C
B
są sobie równe, zaś pod wpływem
przemieszczeń wywołanych siłą m·a (proporcjonalną do przyspieszenia), ulegają zmianie. Na
tej metodzie oparte są m.in. popularne akcelerometry serii MMA firmy Freescale Semicon-
ductor (Motorola).
Firma Analog Devices w produkowanych akcelerometrach również wykorzystuje
efekt zmiany pojemności, przy czym cały układ wykonany jest technologicznie w procesie
produkcji układu scalonego z wykorzystaniem odpowiednio przygotowanych i domieszkowa-
nych obszarów krzemu, w którym pewne warstwy ulegają wytrawieniu. Na rys. 2 przedsta-
wiono w uproszczeniu fragment takiej struktury. Jest to rozwinięcie idei pokazanej na rys. 1 –
mamy tu do czynienia z masą drgającą, zawierającą szereg „zębów” w formie dwustronnego
grzebienia, która może się poruszać w jednej osi. Dwa pozostałe zespoły zębów zamocowane
są na stałe do powierzchni płytki głównej i tworzą z zębami ruchomego grzebienia zespół
Przetworniki elektroniczne do pomiaru wielkości mechanicznych:
akcelerometr, czujnik żyroskopowy, tensometr
3
kondensatorów różnicowych (podobnie jak na rys. 1). Ze względu na małe wymiary układu,
zmiany pojemności pod wpływem przyspieszenia są rzędu setnych części pikofarada.
Rys. 1. Zasada działania pojemnościowego akcelerometru w technologii MEMS
Rys. 2. Grzebieniowa struktura wewnętrzna scalonych akcelerometrów MEMS
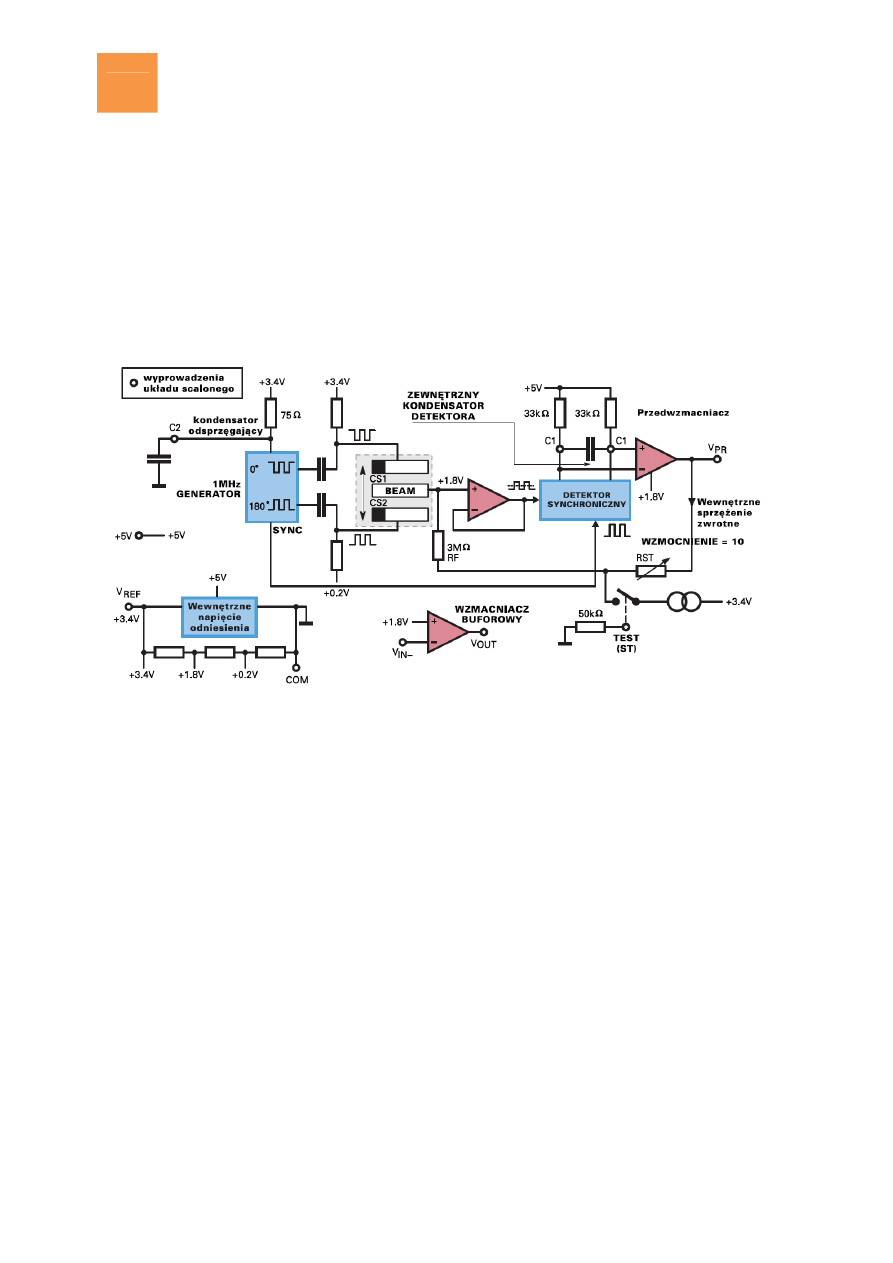
Na rys. 3 przedstawiono schemat blokowy układu. Gdy na grzebień (masę pomiarową)
nie działa żadna siła, ruchomy ząb znajduje się w równej odległości od dwóch współpracują-
cych zębów nieruchomych i tym samym obie pojemności kondensatora różnicowego są rów-
ne. Gdy pod wpływem przyspieszenia, grzebień się przemieści, te dwie pojemności będą się
różnić. Aby monitorować te zmiany pojemności, do dóch nieruchomych zespołów zębów
podawany jest przebieg prostokątny o tej samej częstotliwości i amplitudzie, lecz przeciwnej
fazie. W stanie równowagi, gdy pojemności są równe, na ruchomym grzebieniu (czyli środ-
kowej okładzinie kondensatora różnicowego) nie występuje żaden przebieg. Gdy grzebień się
przesunie, pojemności będą różne i wystąpi na nim przebieg prostokątny o amplitudzie zależ-
nej od wielkości przesunięcia i fazie zależnej od kierunku odchylenia. Przebieg ten, po wy-
prostowaniu w detektorze synchronicznym daje na wyjściu napięcie stałe, którego bieguno-
wość i wartość pokazuje jakie przyspieszenie działa aktualnie na czujnik. W układzie działa
też sprzężenie zwrotne. Napięcie stałe z wyjścia (VPR proporcjonalne do działającego przy-
spieszenia) podawane jest przez te rezystory RF i RST na ruchomą część kondensatora (grze-
bień). W stanie spoczynku na wyjściu i na ruchomym grzebieniu występuje potencjał równy
+1,8V względem masy. Równocześnie dwa zestawy zębów nieruchomych są polaryzowane
napięciem stałym o wartościach odpowiednio +0,2V oraz +3,4V względem masy, zatem mię-
dzy grzebieniem a każdą z nieruchomych części kondensatora występuje ta sama wartość
napięcia stałego 1,6V. Powstające wskutek tego siły elektrostatyczne są w równowadze. Jed-
nak przy odchyleniu grzebienia od stanu równowagi – w wyniku sił wywołanych mierzonym
4
Elektronika
przyspieszeniem, zmiana napięcia stałego na wyjściu (i na grzebieniu) wytworzy siłę wypad-
kową, która w efekcie powoduje powrót grzebienia do pozycji środkowej. Dzięki działaniu
tego sprzężenia zwrotnego grzebień podczas pracy pozostaje cały czas w położeniu środko-
wym (w przybliżeniu), a mimo to stałe napięcie na wyjściu jest proporcjonalne do działające-
go przyspieszenia. Dodatkowa końcówka oznaczona symbolem TEST umożliwia testowanie
sprawności czujnika. Gdy czujnik jest sprawny, podanie dodatkowego napięcia stałego na
grzebień musi spowodować pojawienie się na wyjściu sygnału, który kompensuje to “obce”
napięcie.
Akcelerometry są produkowane jako czujniki 1-, 2- oraz 3-osiowe. Ich zakresy podaje
się z reguły jako wielokrotność przyspieszenia ziemskiego g, np. ±10g.
Rys. 3. Schemat blokowy układu akcelerometru pojemnościowego w technologii MEMS serii
ADXL firmy Analog Devices
(opracowano na podstawie „Półprzewodnikowe czujniki przyspieszenia” Elektronika dla wszystkich,
nr 2/1999, str. 41-46)
Inną grupę akcelerometrów stanowią czujniki termiczne, opracowane przez firmę
Memsic (USA). Ich zaletą jest brak części ruchomych, co powoduje ich większą odporność
na udary oraz mniejszy poziom szumu. Rolę masy bezwładnościowej pełni tu gaz, zgroma-
dzony wewnątrz zamkniętej przestrzeni, rozgrzany przy pomocy umieszczonej centralnie
grzałki. Wiele symetrycznie rozłożonych wokół tej przestrzeni termopar wskazuje rozkład
temperatury gazu. Zmiana położenia czujnika powoduje przemieszczenie gazu i zmianę roz-
kładu mierzonej temperatury – w konsekwencji zmianę rozkładu potencjałów termopar. Jest
on zamieniany na odpowiedni sygnał wyjściowy proporcjonalny do przyspieszenia czujnika.
Żyroskop prędkościowy
Żyroskop jest to ciało sztywne, szybko wirujące wokół swej osi symetrii. Oś wirowa-
nia żyroskopu zachowuje stały kierunek w przestrzeni. Właściwość tę wykorzystuje się w
aparaturze automatycznego kierowania ruchem samolotów, torped, rakiet itd. W żyroskopach
o dwóch stopniach swobody (swoboda ustawiania się osi żyroskopu jest tu ograniczona), gdy
podstawa takiego żyroskopu obraca się wokół pewnej osi, oś wirowania stara się zająć kieru-
nek do niej równoległy. Tę właściwość wykorzystuje się m.in. do pomiaru odchylenia toru

Przetworniki elektroniczne do pomiaru wielkości mechanicznych:
akcelerometr, czujnik żyroskopowy, tensometr
5
lotu samolotu od toru prostoliniowego, w aparaturze do nawigacji inercjalnej, w urządzeniach
łagodzących kołysanie statku. Warunkiem dobrej pracy żyroskopu jest duża prędkość obro-
towa i małe tarcie w łożyskach. Ten drugi cel osiąga się łożyskując żyroskop na strumieniu
sprężonego powietrza lub "zawieszając" go w polu elektrostatycznym. Efekt żyroskopowy
wykorzystano m.in. w żyroskopowych czujnikach prędkościowych, które generują sygnał
napięciowy proporcjonalny do prędkości obrotowej (kątowej) czujnika. Przetworniki takie
znajdują zastosowanie m.in. w: nawigacji GPS, kontroli trakcji pojazdów (układy stabilizacji
toru jazdy ESP), stabilizacji obiektów, kierowaniu i kontroli (np. pojazdów).
Tensometr
Tensometry są czujnikami, w których rezystancja zmienia się proporcjonalnie do ich
odkształcenia. Tensometry wykonuje się w postaci cienkich drutów, siatek lub folii z metalu
lub materiału półprzewodnikowego. Podczas działania sił zewnętrznych tensometry ulegają
odkształceniu. Wraz z wymiarami geometrycznymi zmianie ulega ich rezystancja. Najczęściej
stosowane są tensometry metalowe zbudowane z bardzo cienkich przewodów ułożonych w
kształcie siatki o liniach równoległych (aby zwiększyć długość czynną poddawaną odkształ-
ceniom). Siatka naklejana jest na nośnik, a nośnik bezpośrednio na powierzchnię elementu,
którego odkształcenie jest mierzone. Do głównych zalet tensometrów zalicza się: dużą czu-
łość i dokładność pomiaru, niezawodność, małe wymiary i masę, niewrażliwość na wstrząsy
oraz duże częstotliwościowe pasmo pomiarowe.
Zmiany oporności tensometru pod wpływem odkształceń są niewielkie (ułamki Oh-
ma), dlatego do ich pomiaru wykorzystuje się układy mostka Wheatstone’a. Dla zwiększenia
czułości i linearyzacji zależności napięcia wyjściowego mostka od odkształcenia stosuje się
często dwa aktywne tensometry w układzie półmostka. W celu kompensacji temperaturowych
zmian rezystancji tensometru stosuje się układ pełnego mostka z czterema tensometrami. Przy
pomiarze tak małych rezystancji, istotny wpływ na niezrównoważenie mostka ma opór prze-
wodów połączeniowych. Tensometry stosuje się m.in. do pomiaru ciśnienia (naklejone na
membranę czujnika), do pomiaru siły i momentu obrotowego (naklejane na odkształcany
element) oraz pomiaru sił nacisku (tensometry o nacisku prostopadłym).
Wadą przetworników tensometrycznych jest mała wartość sygnału pomiarowego, co
wymaga odpowiedniej konstrukcji wzmacniaczy odpornych na zakłócenia elektromagnetycz-
ne. Stosowane są także czujniki światłowodowe z siatką Bragga (czujniki typu FBG) – są to
sensory skonstruowane na rdzeniu z jednomodowego światłowodu. Zasada działania takiego
czujnika bazuje na liniowej zmianie długości fali Bragga mierzonej w szerokim zakresie.
Siatka dyfrakcyjna rejestruje zmiany współczynnika załamania światła wzdłuż rdzenia. Wa-
hania długości fali świetlnej są wprost proporcjonalne do zmian temperatury i odkształcenia.
Na sygnał odczytywany z czujnika światłowodowego nie wpływają szumy i straty mocy, po-
nieważ informacja o wielkości mierzonej jest zakodowana w formie długości fali. Przetwor-
niki oparte o sensory FBG mają dużo zalet. Niedogodnością jest potrzeba zastosowania inter-
rogatora – optoelektrycznego urządzenia gromadzącego wyniki pomiarów – oraz komputera z
oprogramowaniem. Interrogator ma za zadanie przede wszystkim wysłać wiązkę światła oraz
odczytać odbicie z poszczególnych czujników.
2. PRZEBIEG ĆWICZENIA
W ramach realizacji ćwiczenia należy wykonać badania układów wskazanych przez
prowadzącego.
Układ laboratoryjny z akcelerometrem
6
Elektronika
Celem ćwiczenia jest zapoznanie się z zestawem projektowo-uruchomieniowy akcele-
rometru ADXL202 firmy Analog Devices wraz z dostarczonym oprogramowaniem testowym.
Zestaw składa się z układu ADXL202 połączonego z mikrokontrolerem. Zadaniem
mikrokontrolera jest konwersja sygnałów PWM czujnika i obsługa transmisji szeregowej z
nadrzędnym komputerem PC. Wraz z zestawem dostarczone jest oprogramowanie umożliwia-
jące kalibrację układu, obróbkę danych i wizualizację sygnałów z czujnika w czasie rzeczywi-
stym.
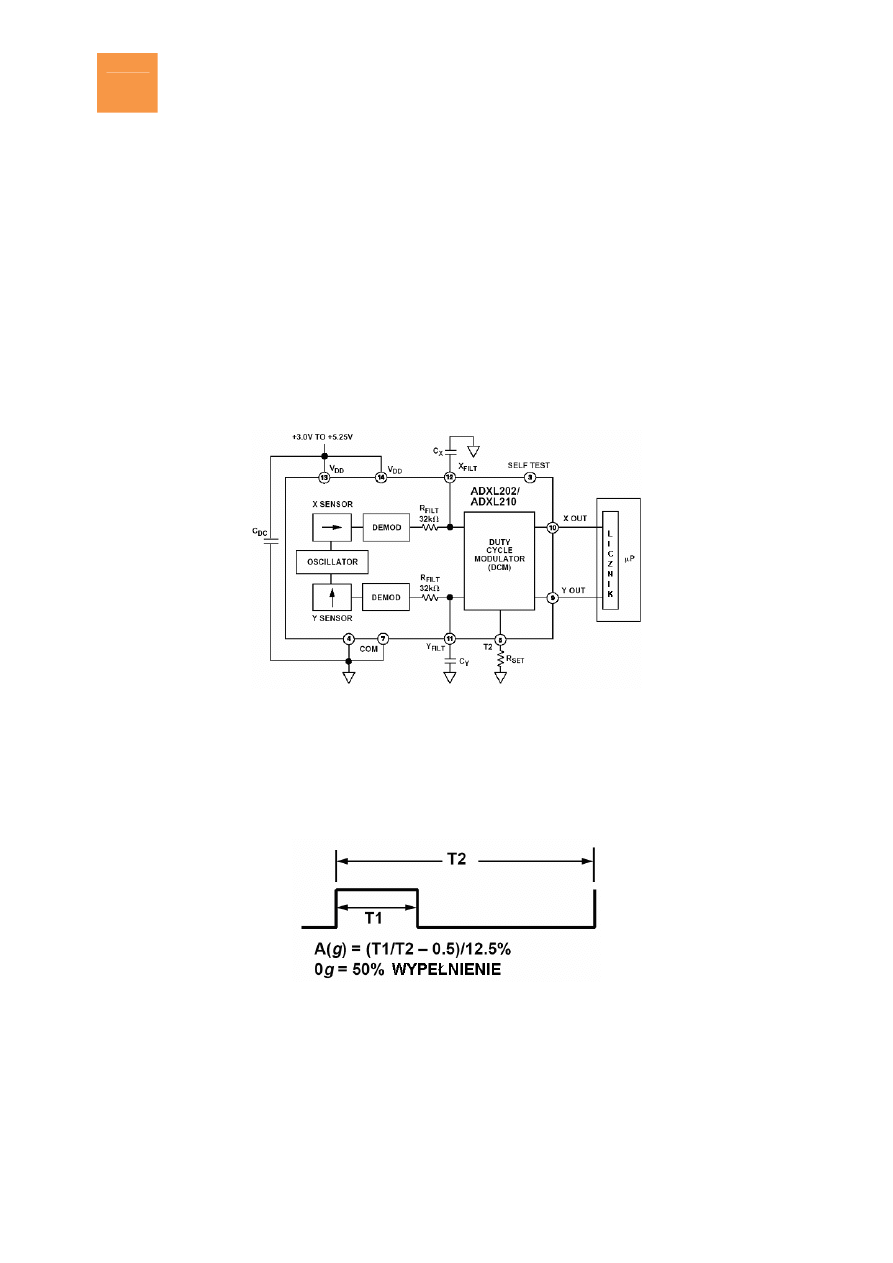
Akcelerometr ADXL202 jest dwuosiowym czujnikiem mikromechanicznym umiesz-
czonym w obudowie układu scalonego. Czujnik mierzy przyspieszenia dynamiczne (np.
wstrząsy, drgania, przyspieszenie w ruchu) i statyczne (np. przyspieszenie ziemskie, nachyle-
nie) do ±2g. Posiada wyjścia analogowe (X
FILT
, Y
FILT
) i cyfrowe (X
OUT
, Y
OUT
) osobne dla
każdej z osi. Wyjścia cyfrowe typu PWM umożliwiają podłączenie układu do systemu mi-
kroprocesorowego bez użycia przetwornika C/A (rys. 4).
Rys. 4. Schemat blokowy układu ADXL202
Współczynnik wypełnienia sygnałów wyjściowych akcelerometru jest proporcjonalny
do działającego na układ przyspieszenia. Przyspieszeniu 0 odpowiada wypełnienie 50%.
Zmiana przyspieszenia o 1g powoduje zmianę wypełnienia o 12,5%. Przykładowy przebieg
wyjściowy sygnału PWM przedstawia rys. 5.
Rys. 5. Przykładowy przebieg wyjściowy PWM układu
ADXL202
Maksymalne pasmo pomiarowe wynosi 500 Hz dla wyjść cyfrowych i 5 kHz dla
wyjść analogowych. Szerokość pasma w obu kanałach ustala się za pomocą kondensatorów
C
X
i C
Y
(rys 1).
Przetworniki elektroniczne do pomiaru wielkości mechanicznych:
akcelerometr, czujnik żyroskopowy, tensometr
7
Przebieg ćwiczenia:
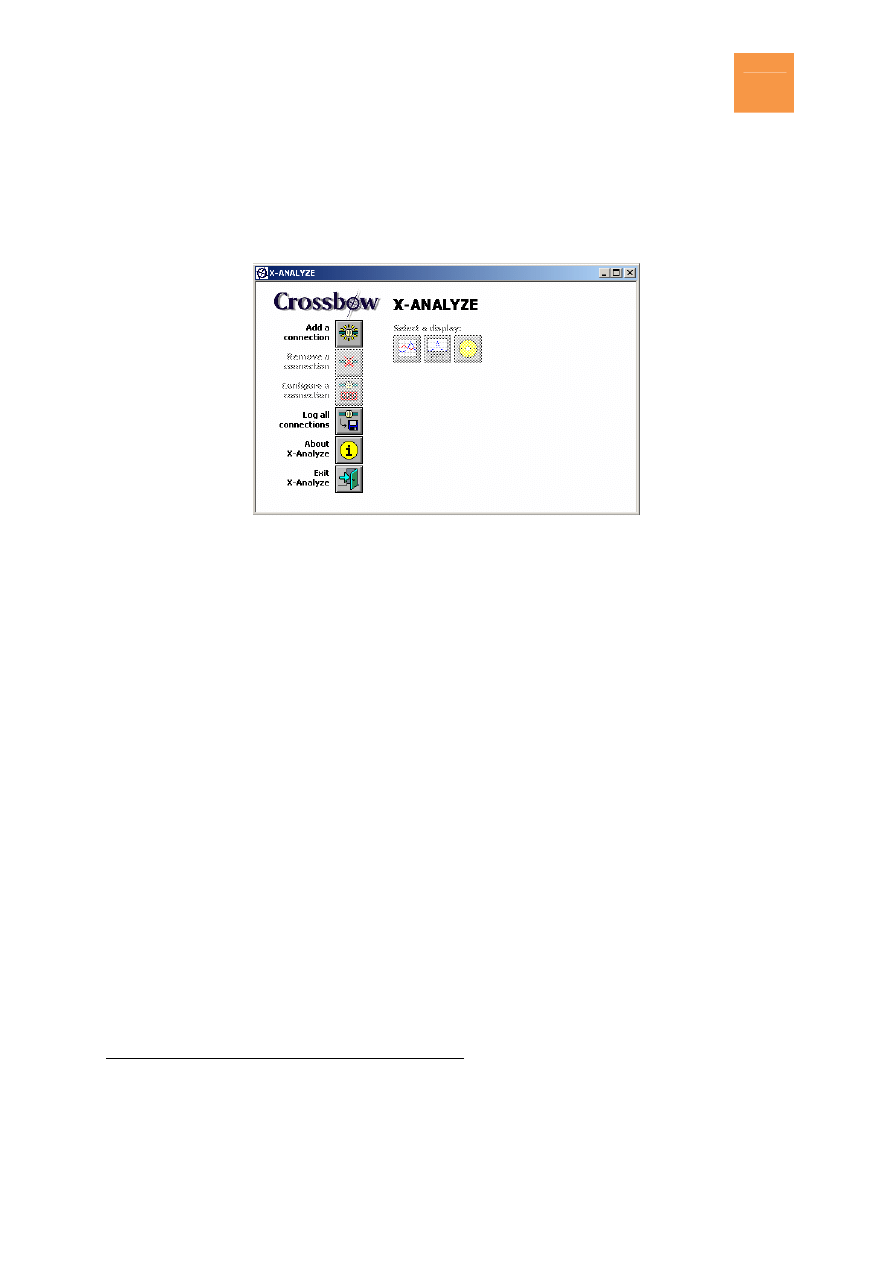
• Zestaw testowy należy podłączyć do wolnego portu COM w komputerze PC i uruchomić
program X-analyze. Po uruchomieniu powinno pokazać się okno jak na rys. 6. Aby uak-
tywnić wszystkie opcje, należy wcisnąć przycisk Add a connection, wybrać odpowiednie
połączenie i zatwierdzić.
Rys. 6. Okno programu X-analyze
• Uruchomić program analizy czasowej. Położyć płytkę płasko na stole i dokonać kalibracji
układu (oba przebiegi powinny pokrywać się z osią X wykresu).
− Poruszać energicznie płytką (w obu kierunkach) i zaobserwować jaką maksymalną
wartość przyspieszenia możemy zmierzyć. Porównać z danymi katalogowymi.
− Przeskalować wykres tak, aby można było łatwo zaobserwować wartość przyspieszenia
ziemskiego. Postawić płytkę prostopadle do stołu i zaobserwować przebiegi. Powtórzyć
to dla każdego boku płytki. Zaobserwować czy wyniki pomiarów pokrywają się z
osiami zaznaczonymi na płytce – wynik przedstawić graficznie.
− Obliczyć jakie przyspieszenie dla każdej z osi wskaże układ przechylony pod kątem
45º, 135º, 225º i 315º. Sprawdzić to doświadczalnie. Wartości dokładne można uzyskać
rejestrując pomiary. W tym celu należy wcisnąć ikonę Log all connections na ok. 1 s.
Wyniki pomiarów domyślnie znajdują się w katalogu C:\data. Wyniki przedstawić gra-
ficznie wraz z obliczeniami.
• Uruchomić program analizy FFT. Wykalibrować układ. Poruszać płytką zgodnie z kie-
runkiem osi układu ADXL202 i zaobserwować przebiegi. Zaobserwować zmiany w wid-
mie. Jak wykorzystać praktycznie analizę FFT sygnału z akcelerometru?
• Uruchomić program „poziomicy”. Ustawić maksymalny zakres (90º) i wykalibrować
układ.
− Zmieniać położenie płytki i obserwować przemieszczanie się wskaźnika „poziomicy”.
Czy kierunek i zwrot osi jest poprawny?
− Zmniejszyć zakres i powtórzyć doświadczenie. Dlaczego dla małego zakresu kątów
trudno jest uzyskać stabilny wynik?
Układ laboratoryjny z czujnikiem żyroskopowym
Badany w ćwiczeniu przetwornik to żyroskop prędkościowy firmy Analog Devices AD-
XRS150 z czujnikiem mikromaszynowym. Podstawowe parametry przetwornika:
• typowa czułość k
gtyp
= 12,5 mV/
°/s (minimalna 11,25, maksymalna 13,75);
• napięcie zasilania V
CC
= 5 V
8
Elektronika
• prąd pobierany (typowo) I
CC
= 6 mA
• napięcie wyjściowe dla zerowego sygnału V
Out0
= 2,5
±0,3 V
• pasmo przenoszenia do 40 Hz (dla konfiguracji użytej w ćwiczeniu)
• częstotliwość rezonansowa czujnika f
r
= 14 kHz
• zakres zmian napięcia wyjściowego 0,25 do 4,75 V
• zakres temperatur pracy -55 °C do +125 °C
Uwaga!!! Czujnik nie jest odporny na wyładowania elektrostatyczne (ESD).
Zastosowania: nawigacja GPS, kontrola trakcji pojazdów, stabilizacja obiektów, wewnętrzne
systemy pomiarowe, kierowanie i kontrola (np. pojazdów).
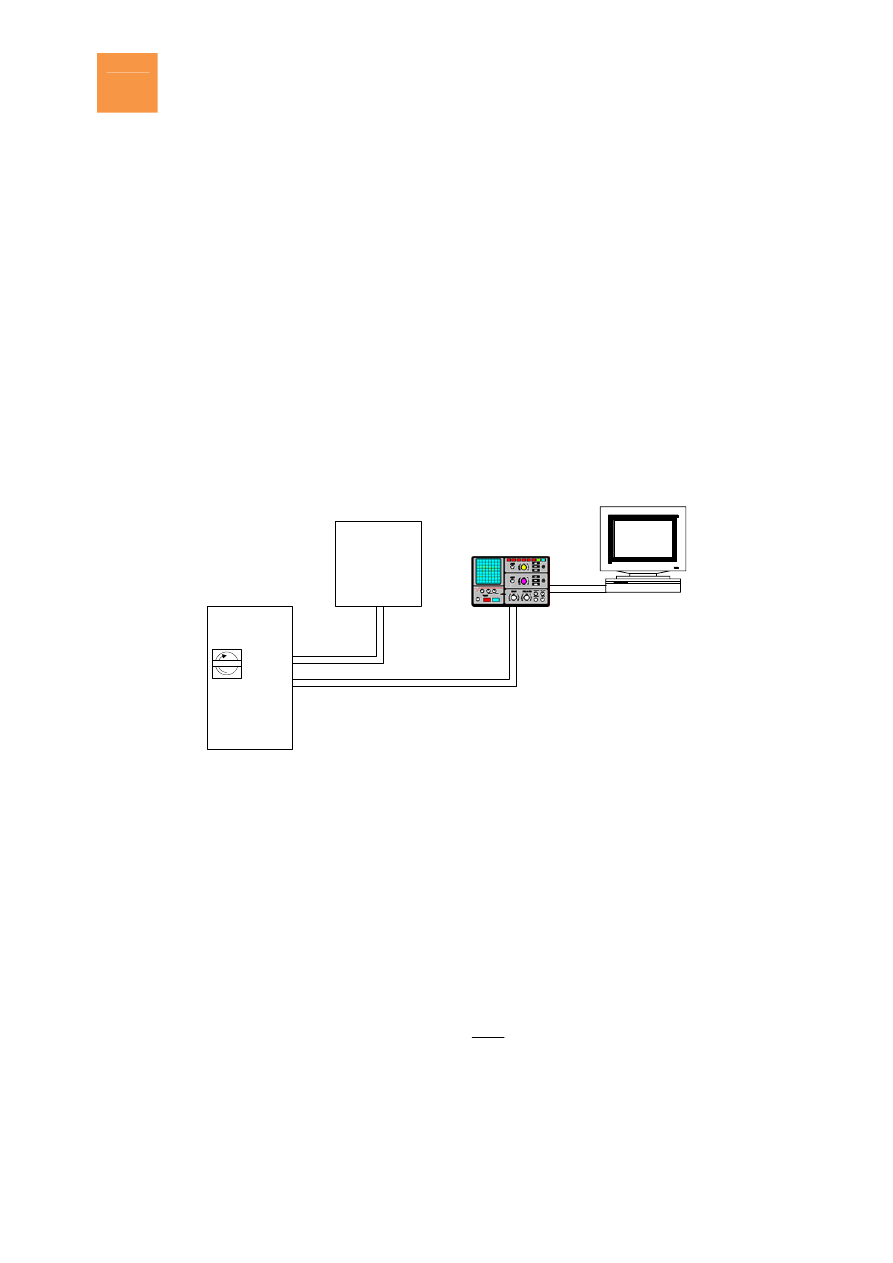
Schemat blokowy układu pomiarowego pokazano na rys. 7. Płytkę z żyroskopem
umieszczono w układzie umożliwiającym obracanie przetwornika o zadany kąt. Napięcie
wyjściowe z przetwornika, proporcjonalne od prędkości obrotowej, rejestrowane jest przez
oscyloskop. Przebiegi mogą być rejestrowane na zewnętrznej karcie pamięci oscyloskopu i
przenoszone za pośrednictwem portu USB do komputera. Układ czujnika zasilany jest z zasi-
lacza laboratoryjnego +5 V.
Workstation
Zasilacz 5V
Oscyloskop
Komputer
rejestrujacy
dane
Oscyloskop
VCC
GND
RATE OUT
AGND
+ -
Przetwornik
Żyroskopowy
Rys. 7. Schemat blokowy układu do badania czujnika żyroskopowego
Przebieg ćwiczenia:
W ćwiczeniu należy dokonać kolejno rejestracji napięcia wyjściowego czujnika pod-
czas obracania czujnika o kąt: 30
°, 45°, 60°, 75°, 90°. Obrotu czujnika należy dokonywać z
taką prędkością, aby sygnał wyjściowy nie uległ ograniczeniu.
Zarejestrowane dane należy poddać obróbce na przykład przy użyciu arkusza kalkula-
cyjnego:
Usunąć składową stałą, tak, aby przy braku prędkości obrotowej otrzymać sygnał równy zero
(patrz: sygnał po skorygowaniu na rys. 5). Następnie tak otrzymane napięcie należy scałko-
wać numerycznie po czasie i pomnożyć przez odwrotność współczynnika wzmocnienia czuj-
nika pomiarowego:
gtyp
m
n
n
n
Vn
k
t
t
U
1
)
(
1
1
⋅
⎥
⎦
⎤
⎢
⎣
⎡
−
⋅
≈
∑
=
−
α
[
° ]
gdzie:
α
- kąt obrotu płytki z przetwornikiem; U
Vn
– wartość napięcia zarejestrowana z prze-
twornika [V]; t
n
– czas dla próbki n [s]; k
gtyp
- typowa czułość przetwornika [mV /
°/ s]; n –
numer próbki z oscyloskopu; m – liczba wszystkich próbek
Przetworniki elektroniczne do pomiaru wielkości mechanicznych:
akcelerometr, czujnik żyroskopowy, tensometr
9
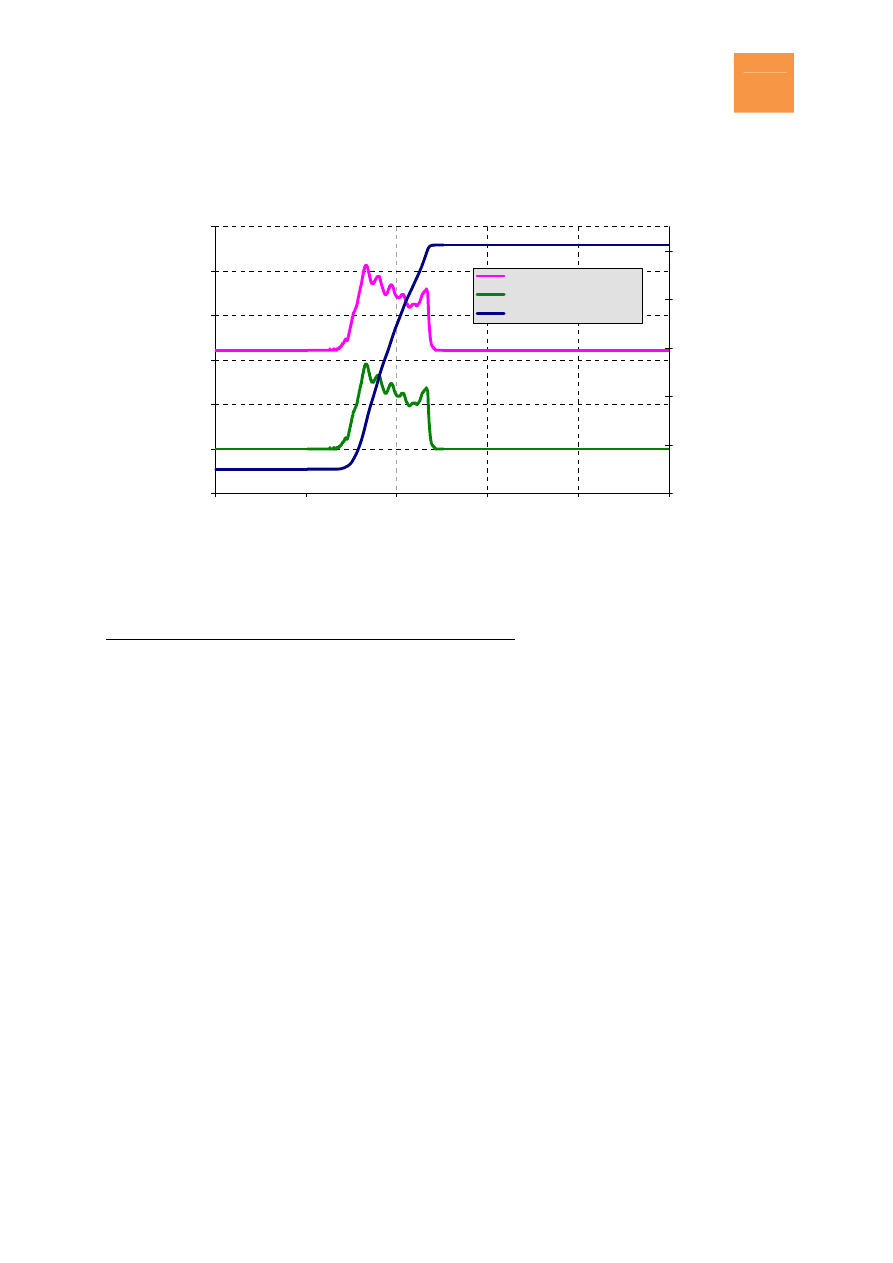
Przykładowy przebieg napięcia zmierzonego proporcjonalnego do prędkości obroto-
wej pokazany został na rys. 8.
-1
0
1
2
3
4
5
0
1
2
3
4
5
czas [s]
Napi
ęcie [V]
-10
10
30
50
70
90
ką
t obrotu [°]
Sygnał z czujnika
Sygnał po skorygowaniu
Kąt obrotu czujnika
Rys. 8.
Przykładowe przebiegi zarejestrowane dla kąta obrotu czujnika równego 90
°
Układ laboratoryjny z przetwornikiem tensometrycznym
Podczas ćwiczenia badany jest tensometryczny czujnik siły CL17p o zakresie pomia-
rowym 100 N. Sygnał z tego czujnika wzmacniany jest przez dedykowany wzmacniacz po-
miarowy CL10. Zmianę siły działającej na tensometr realizuje się poprzez obrót tzw. śruby
rzymskiej. Równocześnie z badanym czujnikiem tensometrycznym siła wyznaczana jest za
pomocą elektronicznego miernika siły.
Przebieg ćwiczenia:
Podczas ćwiczenia należy wyznaczyć charakterystykę układu tensometrycznego
przyjmując jako wzorcowe wskazanie elektronicznego miernika siły. Zakres pomiaru powi-
nien mieścić się w przedziale od 0 do 100 N. Zmian naprężenia należy dokonywać w sposób
ostrożny, obserwując wskazanie miernika elektronicznego. Przekraczanie górnego zakresu
pomiarowego (nawet chwilowe) może skutkować uszkodzeniem czujnika tensometrycznego,
więc należy tego bezwzględnie unikać.
NA ZAJECIA NALEŻY PRZYNIEŚĆ NOŚNIK DANYCH
KORZYSTAJĄCY Z INTERFEJSU USB
3. SPRAWOZDANIE
W sprawozdaniu należy:
• omówić przebieg ćwiczenia,
• zamieścić wartości sygnałów wyjściowych akcelerometru w obydwu osiach przy od-
powiednich pochyleniach kątowych czujnika – sprawdzić zgodność relacji sygnału
wyjściowego ze zmianami wartości składowych przyspieszenia ziemskiego dla poda-

10
Elektronika
nych kątów pochylenia czujnika, skomentować ewentualne rozbieżności wyników
pomiaru z wartościami oczekiwanymi,
• opisać zachowanie się sygnałów wyjściowych i zakres uzyskiwanej ich amplitudy
przy dynamicznych cyklicznych zmianach położenia czujnika; przedyskutować uzy-
skane wyniki obserwowane przy pomocy programu do analizy FFT,
• zamieścić i omówić przebiegi sygnału wyjściowego czujnika żyroskopowego uzyska-
ne przy obracaniu czujnika o podane wartości kąta obrotu. Przeprowadzić całkowanie
tych sygnałów (np. korzystając z programu Excel) i sprawdzić relację uzyskanego sy-
gnału kąta dla poszczególnych przypadków obrotu czujnika,
• umieścić i szczegółowo omówić komendy (ich składnię) wydawane modułom oraz
odpowiedzi na nie,
• wykreślić charakterystykę układu tensometrycznego (napięcie w funkcji mierzonej si-
ły), ocenić jej liniowość.
4. PYTANIA
1.
Omówić podstawy fizyczne i zasadę działania typowych akcelerometrów.
2.
Wyjaśnić, dlaczego w akcelerometrach serii ADXL zakres ruchu elektrod ruchomych
jest silnie ograniczony?
3.
Omówić konstrukcję i zasadę działania przetworników do pomiaru siły.
4.
Wyjaśnić, dlaczego przy pomiarach siły czujnikami tensometrycznymi należy stoso-
wać wzmacniacze?
5.
W jaki sposób wyznaczyć wartość kąta obrotu posługująć się żyroskopem prędko-
ściowym?
5. ZAGADNIENIA
1.
Podać i omówić przykłady zastosowań czujników akcelerometrycznych i żyroskopo-
wych.
2.
Zaproponować sposób wykorzystania akcelerometru do uruchamiania poduszek po-
wietrznych w samochodzie (wybrać odpowiedni typ akcelerometru, przedstawić sche-
mat blokowy układu, przewidzieć możliwość kontroli sprawności czujnika).
Wyszukiwarka
Podobne podstrony:
MM CW5L nowe
MM CW4L nowe
MM CW7L nowe
integracja-mm, chomikowane nowe, cybernetyka
informacja-mm, chomikowane nowe, cybernetyka
homeostaza-mm, chomikowane nowe, cybernetyka
MM CW6L nowe
hnpn-mm, chomikowane nowe, cybernetyka
ems-mm, chomikowane nowe, cybernetyka
MM CW4L nowe
MM CW6L nowe
zajcia 3 nowe
style nowe
Rozrˇd Šwiczenia nowe
pytania nowe komplet
więcej podobnych podstron