
Podstawy teorii błędów i niepewności pomiarów
Błąd, dokładność, niepewność wyniku pomiaru
Nie jest możliwe określenie wartości prawdziwej wielkości mierzonej, ponieważ
rezultat pomiaru zawsze jest obarczony błędem.
Pomiar nie uzupełniony oszacowaniem błędu jest bezwartościowy.
Teoria błędów ma znaczenie kluczowe dla miernictwa.
W 1993 roku Międzynarodowa Organizacja Normalizacyjna (International
Standards Organization, ISO) wydała opracowanie zatytułowane Guide to the
Expression of Uncertainty in Measurement (Wyrażanie niepewności
pomiarów - przewodnik)
Wielkość mierzona jest nazywana mezurandem,
wynik pomiaru jest estymatą wartości prawdziwej, a z kolei estymata jest
wartością estymatora otrzymaną jako rezultat estymacji.
Wykładnia przewodnika ISO jest w pewnym sensie obowiązującym prawem
(choćby dlatego, że jest zaleceniem Międzynarodowego Biura Miar oraz polskiego
Głównego Urzędu Miar).

Przewodnik ustala ogólnie obowiązujące zasady obliczania i wyrażania
niepewności pomiaru, które mogą być stosowane dla wszystkich pomiarów
fizycznych, niniejszy dokument przedstawia metody właściwe
dla pomiarów wykonywanych w laboratoriach zajmujących się wzorcowaniem
i opisuje jednoznaczny, zharmonizowany sposób wyznaczania i dokumentowania
niepewności pomiaru.
Dokument zawiera omówienie następujących tematów:
• definicje istotne dla dokumentu,
• metody obliczania niepewności pomiaru wielkości wejściowych,
• związek pomiędzy niepewnością pomiaru wielkości wyjściowej oraz
niepewnością pomiaru wielkości wejściowych,
• niepewność rozszerzona pomiaru wielkości wyjściowej,
• podawanie niepewności pomiaru,
• szczegółowa procedura obliczania niepewności pomiaru.

Podany wynik pomiaru tylko wtedy jest kompletny, gdy zawiera zarówno
wartość wielkości mierzonej, jak i niepewność pomiaru, związaną z tą
wartością.
Wszystkie wielkości, których wartości nie są dokładnie znane, będą traktowane
jako zmienne losowe; dotyczy to również wszystkich wielkości wpływających,
które mogą oddziaływać na wartość mierzoną.
Niepewność pomiaru jest parametrem związanym z wynikiem pomiaru
charakteryzującym rozrzut wartości, które można w sposób uzasadniony
przypisać wielkości mierzonej .
Wielkości mierzone są szczególnymi wielkościami, których wartość należy
określić poprzez pomiar. Przy wzorcowaniu mamy zwykle do czynienia tylko z
jedną wielkością mierzoną, nazywaną również wielkością wyjściową Y, która
jest związana
z wielkościami wejściowymi Xi (i = 1, 2,..., N) funkcją
Y = f (X1 , X2, ..., XN)
Funkcja pomiaru f opisuje zarówno metodę pomiarową jak i metodę
obliczeniową.

Pomiar jest wykonywany z określona dokładnością .
Oznacza to, że nie jest możliwy pomiar bezbłędny i zawsze zmierzona wartość
jest znana z określonym błędem. Wynik pomiaru X powinno się więc zapisywać
w postaci (1)
Wykonaliśmy pomiar z niedokładnością (błędem) równym np. 0,01%.
Pomiar zrobiono z błędem nie przekraczającym 0,01%", a można też mówić
„pomiar zrobiono z niepewnością 0,01%".
Xp - wartość wielkości rzeczywistej
ΔX – błąd bezwzględny pomiaru
Niedokładność pomiaru można wyrażać przez pojęcie niepewności określenia
wyniku pomiaru
X
X
X
p
Δ
±
=

Zbiór wartości wejściowych Xi może być podzielony na dwie kategorie w zależności
od sposobu, w jaki zostały określone wartości tych wielkości i związane z nimi
niepewności:
(a) wielkości, których estymaty oraz związane z nimi niepewności wyznaczone są
bezpośrednio z pomiaru.
Wartości te można uzyskać np. z pojedynczej obserwacji, powtarzanych obserwacji
albo na podstawie oceny opartej na doświadczeniu.
(b) wielkości, których estymaty oraz związane z nimi niepewności są wprowadzane
do funkcji pomiaru ze źródeł zewnętrznych, jak np.: wielkości związane
z wzorcami jednostek miar, certyfikowanymi materiałami odniesienia lub danymi
odniesienia otrzymanymi z literatury specjalistycznej.
Estymatę wielkości mierzonej Y, oznaczoną y i nazwaną estymatą wielkości
wyjściowej, otrzymuje się z równania poprzez podstawienie estymat wielkości
wejściowych xi w miejsce wartości wielkości mierzonych Xi.
y = f (x1, x2, ..., xN)

Przyjmuje się, że wartości wejściowe są najlepszymi estymatami wielkości
wejściowych, które zostały odpowiednio skorygowane z uwzględnieniem
wszystkich istotnych oddziaływań dla danego modelu pomiaru.
W przeciwnym przypadku do modelu matematycznego pomiaru należy
wprowadzić odpowiednie poprawki jako osobne wielkości wejściowe.
Miarą rozrzutu wartości przypisanych wielkości mierzonej, traktowanych jako
zmienna losowa, jest wariancja ich rozkładu lub jej pierwiastek kwadratowy,
nazywany odchyleniem standardowym.
Niepewność standardowa pomiaru związana z estymatą wielkości
wyjściowej lub wynikiem pomiaru, oznaczona u(y) jest odchyleniem
standardowym wielkości mierzonej Y.
Określa się ją na podstawie estymat xi wielkości wejściowych Xi oraz na
podstawie związanych z nimi niepewności standardowych u(xi).
W niektórych przypadkach uzasadnione jest stosowanie względnej
niepewności standardowej pomiaru;

Zalecenia przewodnika ISO opierają się na założeniu, że każdy wynik pomiaru
jest znany z możliwą do określenia niepewnością.
Równanie (1) możemy przepisać w postaci
Wynik pomiaru X jest zawarty w przedziale ±ΔX wokół wartości prawdziwej Xp
(ΔX jest błędem bezwzględnym pomiaru).
Zgodnie z zaleceniami przewodnika ISO tę samą zależność powinniśmy
zapisywać jako (2)
co odczytujemy: wynik pomiaru X jest zawarty w przedziale niepewności ±u
wokół wartości estymowanej Xo z poziomem ufności (1 — α)
(α -prawdopodobieństwo, że wartość prawdziwa leży poza przedziałem
niepewności )
Między równaniami istnieje kilka zasadniczych różnic.
Błąd pomiaru ΔX został zastąpiony pojęciem niepewności pomiaru u.
Do określenia błędów wykorzystujemy teorię prawdopodobieństwa.
Większość wyników pomiarów ma charakter stochastyczny, co może być
spowodowane, na przykład, wpływem trudnych do ustalenia zakłóceń.
X
X
X
p
Δ
±
=
X
X
X
X
X
p
p
Δ
+
≤
≤
Δ
−
u
u
X
X
u
X
P
o
o
−
≥
+
≤
≤
−
1
)
(

Zamiast wartości prawdziwej Xp (której nigdy nie znamy) wprowadza się więc
pojęcie wartości estymowanej (przewidywanej Xo).
Wartość estymowana może być określana przy wykorzystaniu rachunku
prawdopodobieństwa - na przykład jako wartość średnia z wielu pomiarów.
Każdy pomiar jest obarczony błędem przypadkowym.
Np. nawet bardzo dokładny przyrząd cyfrowy jest obarczony niepewnością
u = ±0,5 LSB (LSB - najmniej znaczący bit).
Jeśli więc woltomierz cyfrowy wskaże wartość: 4,9996 V, to równie prawdopodobne
są wszystkie wartości zawarte między 4,99955 a 4,99965.
Przypuśćmy, że w wyniku przeprowadzenia serii pomiarów otrzymaliśmy zestaw
danych, na przykład w postaci tabeli lub rysunku .
Wstępnie możemy wyniki pomiarów szybko przeanalizować, konstruując np..
histogram.
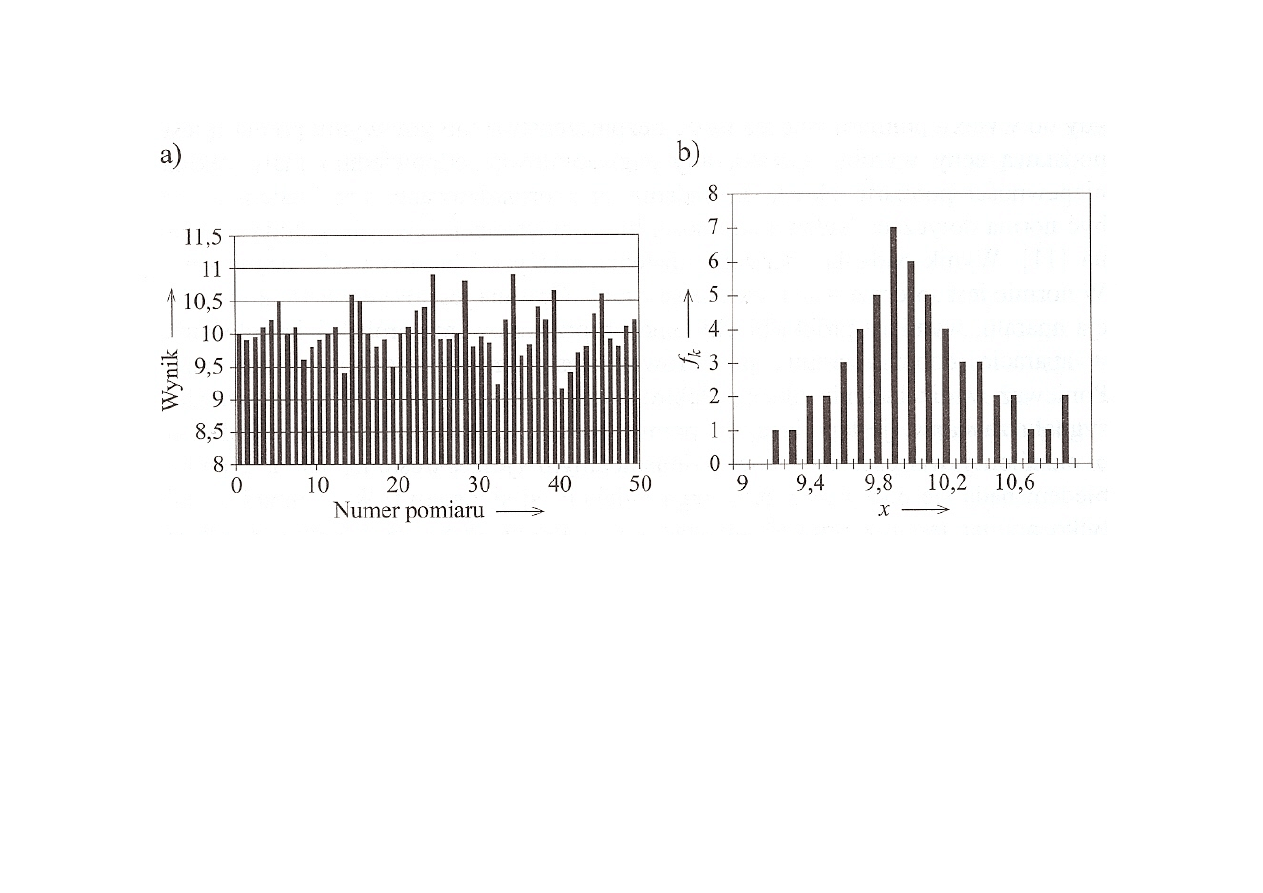
Seria wyników pomiaru: a) zapis w postaci rysunku, b) histogram
Na podstawie histogramu możemy łatwo oszacować, w jakim zakresie wynik
pomiaru mieści się najczęściej.
Środek tego zakresu można uznać za wartość estymowaną - bardzo często jest ona
zgodna z wartością średnią serii pomiarów. Na podstawie kształtu histogramu (np.
jego szerokości) wnioskujemy o zakresie niepewności rezultatu pomiaru.
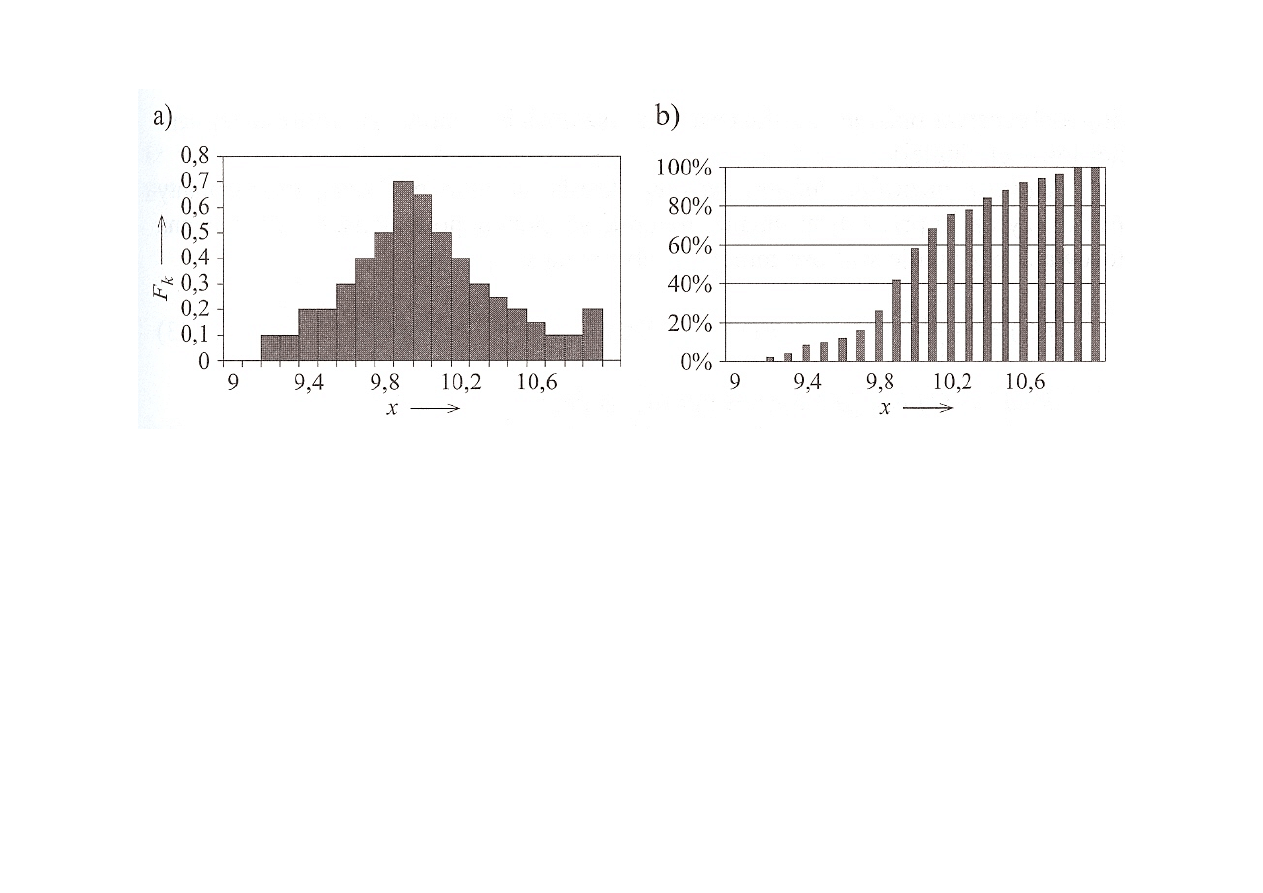
Histogram: a) wysokość słupka F
k
= f
k
Δx,
b) łączne występowanie wszystkich wartości od najmniejszej do danej
Wyniki serii pomiarów zamiast w postaci histogramu możemy przedstawiać jako
rozkład prawdopodobieństwa wystąpienia danego wyniku.
Na osi pionowej podajemy wówczas gęstość prawdopodobieństwa f(x)
wystąpienia określonego wyniku pomiaru.
Podaje się też niekiedy krzywą dystrybuanty F(x) wystąpienia danego wyniku .
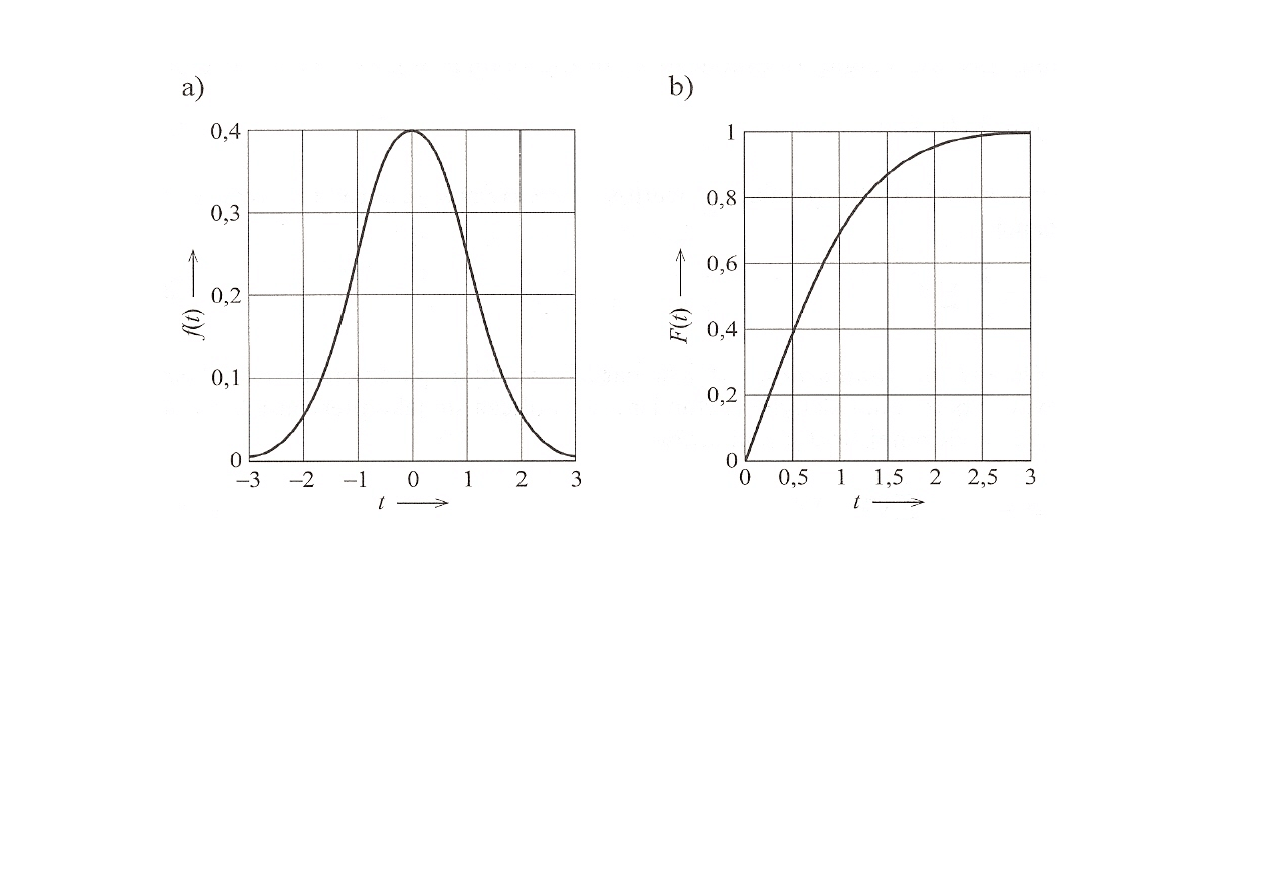
Najczęściej rozkład prawdopodobieństwa opisuje się krzywą rozkładu
normalnego, nazywaną też krzywą Gaussa.
Porównanie rysunków wskazuje, że krzywa gęstości prawdopodobieństwa
odpowiada histogramowi a, a krzywa dystrybuanty -histogramowi b.
Przykład krzywej funkcji rozkładu normalnego: a) przebieg gęstości
prawdopodobieństwa f(t), b) przebieg dystrybuanty F(t)
Gęstość prawdopodobieństwa f(x) określa się jako pochodną dystrybuanty
F(x), Dystrybuanta oznacza prawdopodobieństwo , że zmienna losowa X
przyjmuje wartość mniejszą lub równą x.
f(x)=dF(x)/dx
F(x)=P(X<=x)
Rozkład Gaussa określony jest za pomocą równania
]
)
(
2
1
exp[
2
1
)
(
2
σ
μ
π
σ
−
−
=
x
x
f
σ – odchylenie standardowe rozkładu normalnego μ- wartość oczekiwana,
estymowana
Dla rozkładu normalnego wartość μ pokrywa się osią symetrii krzywej Gaussa
i dla nieskończonej liczby pomiarów określona jest wzorem. Dla skończonej
liczby pomiarów μ równa się średniej arytmetycznej.
∫
∞
∞
−
⋅
=
dx
x
f
x
)
(
μ
∑
=
=
n
i
i
x
n
x
1
1
Odchylenie standardowe σ jest ważnym parametrem określającym niepewnośc
pomiaru , oblicza się go jako pierwiastek z wariancji dla skończonej liczby
pomiarów
∑
=
−
−
=
n
i
i
x
x
n
1
2
)
(
1
1
σ
Odchylenie standardowe określa ,że wartość oczekiwana (estymowana) wielkości
zmierzonej mieści się w przedziale ± σ z prawdopodobieństwem 68%. Dla
przedziału ±2σ prawdopodobieństwo wynosi 95% , a dla ±3σ wynosi 99,7%.
Odchylenie standardowe σ jest miarą niepewności pojedynczego pomiaru z serii
pomiarów.
Odchylenie standardowe średniej arytmetycznej σ
av
= σ /√n
Zwiększając liczbę pomiarów zmniejszamy zakres niepewności określenia średniej
arytmetycznej
. Jednak zwiększenie liczby pomiarów stukrotnie powoduje
zmniejszenie σ
av
dziesięciokrotnie. W przypadku niewielkiej liczby pomiarów
korzystniejsze jest stosowanie rozkładu Studenta. Krzywa dla tego rozkładu jest
bardziej spłaszczona i szersza w stosunku do rozkładu Gaussa. Dla n>30 obie
krzywe są praktycznie takie same.
x

Do analizy błędów można stosować inne krzywe gęstości rozkładu, np. krzywą
rozkładu równomiernego (prostokątnego) lub trójkątnego.
Procedura określania niepewności typu A jest zgodna z rachunkiem
prawdopodobieństwa , natomiast określenie niepewności typu B jest bardziej
skomplikowane.
Należy oszacować błędy systematyczne oraz ich rozkład prawdopodobieństwa .
W przypadku mierników wskazówkowych niedokładność miernika określa klasa
miernika podawana przez producenta.
Dla mierników cyfrowych często producenci stosują regułę ±(%rdg +%FS) tzn.
sumą niedokładności względnej odczytanej (reading) i niedokładności dla
zakresu miernika.
Duże znaczenie ma wykorzystanie zakresu pomiarowego.
Czasami stosuje się opis ±(ppm rdg + ppm FS) , dla bardzo dokładnych
mierników.
Dla mierników analogowych klasa definiowana jest :
Klasa miernika= (∆X
max
/ X
max
) 100 (%)
∆Xmax – maksymalna dopuszczalna niedokładność bezwzględna

Np.
Dla 4 cyfrowego miernika o zakresie 10V , wskazania wyniosły 0,400 V,
Jego niedokładność podano ±(0,05rdg+0,01FS)% tzn.
± (0,05*0,400 +0,01*10,000)/100 V= ±(0,020+0,1)/100 V= ± 1,2mV
Bezwzględna niepewność pomiaru 1,2 mV
Dla zakresu 1V niepewność wyniesie 0,3 mV
Dla miernika analogowego o zakresie 10V i klasie 1 ∆Xmax wyniesie
1*10V/100=0,1 V (dla pomiaru napięcia 10V)
Natomiast pomiar napięcia 5V obarczony jest niepewnością względną dwukrotnie
większą (2%) niż w przypadku pomiaru napięcia 10V.
Podane wartości niepewności dotyczą warunków znamionowych pracy
mierników.
Niepewność pomiaru może wynikać z wielu przyczyn np..
Niedokładności wzorców, nieliniowości przetwarzania (histerezy, błędów
czułości, błędów zera).
Niepewność pomiaru związana z estymatami wielkości wejściowych jest
obliczana metodą typu A lub typu B.
Metoda typu A obliczania niepewności standardowej jest metodą, w której
niepewność jest obliczana za pomocą analizy statystycznej serii obserwacji.
Niepewność standardowa jest w tym przypadku odchyleniem standardowym
eksperymentalnym średniej otrzymanej metodą uśredniania lub
odpowiednią analizą regresji.
Metoda typu B obliczania niepewności standardowej jest metodą, w której
niepewność jest obliczana innym sposobem niż analiza statystyczna serii
obserwacji.
Metodę typu A obliczania niepewności standardowej stosuje się wtedy, gdy
istnieje możliwość przeprowadzenia w identycznych warunkach pomiarowych
wielu niezależnych obserwacji jednej z wielkości wejściowych.
Jeżeli rozdzielczość procesu pomiarowego jest wystarczająca, otrzymane wyniki
charakteryzuje zauważalny rozrzut.
Na podstawie serii n pomiarów określamy wartość średnią oraz odchylenie
standardowe .
Niepewność pomiaru określamy dla przyjętego poziomu ufności.
Dla prawdopodobieństwa 99,7% (3σ ) współczynnik rozszerzenia k=3
Odpowiednio dla prawdopodobieństwa 95% (2σ ) współczynnik rozszerzenia
wynosi k=2
Wynik pomiaru zawiera się w granicach
)
(x
u
x
x
±
=
av
k
x
u
σ
=
)
(
W przypadku niepewności typu B należy uwzględnić błędy systematyczne
oraz przypadkowe. Dla miernika cyfrowego napięcia można przyjmować
prostokątny (równomierny) rozkład gęstości prawdopodobieństwa , niektóre
mierniki cyfrowe np. częstościomierze mają rozkład prawdopodobieństwa
zbliżony do trójkątnego .
Niepewność wyniku pomiaru dla rozkładu prostokątnego wynosi u(x)/ √3 ,
dla rozkładu trójkątnego u(x)/ √6,
Całkowitą niepewność dla niepewności obliczonych metodą A i metoda B
można wyznaczyć
)
(
)
(
)
(
2
2
x
u
x
u
x
u
B
A
+
=
Obliczanie niepewności komplikuje się, jeżeli pomiar nie jest bezpośredni ,
ale wielkość estymowana jest zależnością funkcyjną (pomiar pośredni)
y=f(x1, x2, x3 , …, xn)
Należy wówczas korzystać z prawa propagacji błędów.
Należy zwrócić uwagę na poprawny zapis wyników pomiarów
Np. jeżeli zmierzono napięcie 5,345 V z niepewnością 0,1% (tzn.
5,345±0,005) nie można zapisywać np.. 5,34523 V (zbyt duża liczba cyfr
znaczących ).
Niepoprawne jest też zaokrąglanie wyniku do postaci np.. 5,34 V
Ostatnia cyfra znacząca w wyniku pomiaru powinna być tego samego
rzędu co błąd .
Główne metody pomiarowe
W zależności od sposobu porównania mierzonej wielkości z wzorcem
rozróżnia się metody pomiarowe: bezpośrednią i pośrednią.
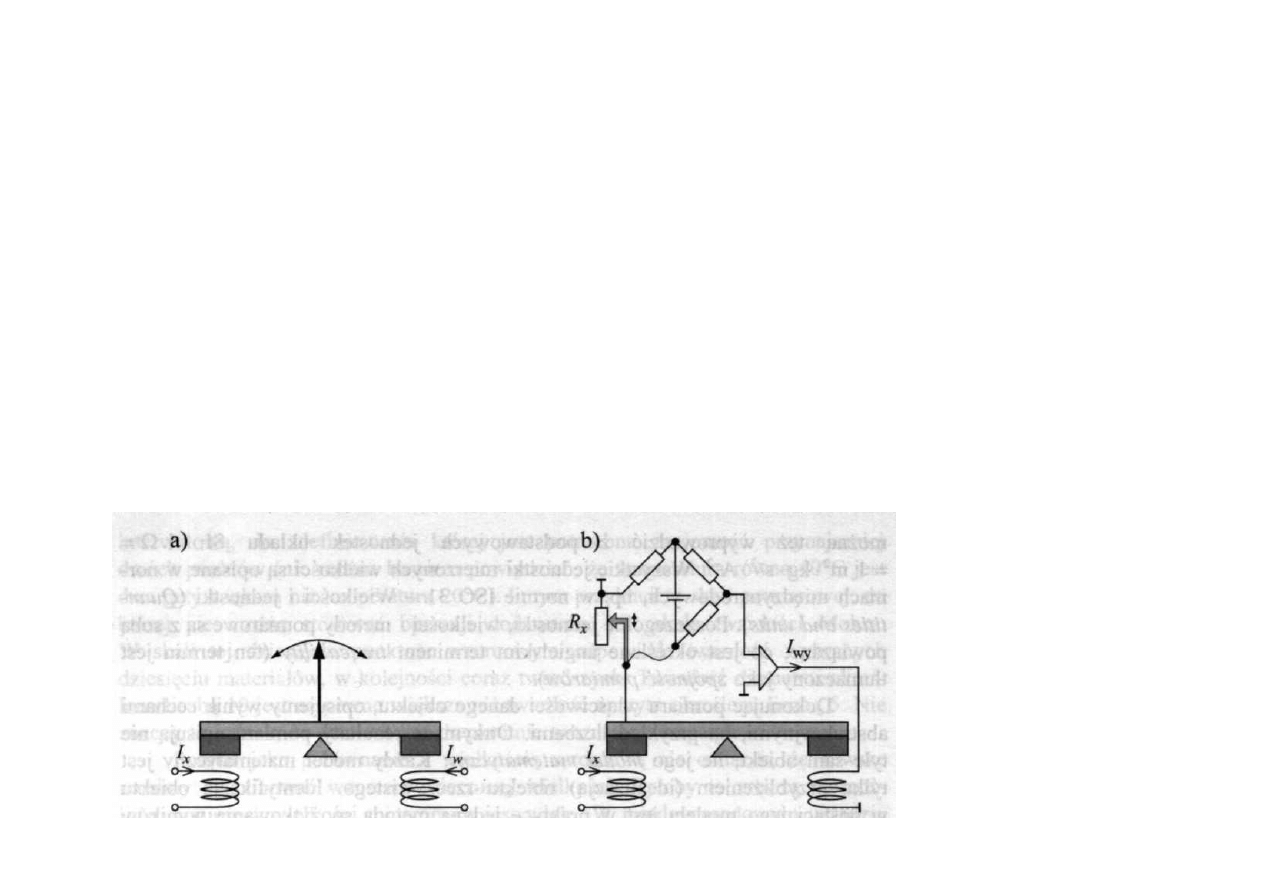
Na rysunku jest pokazany pomiar prądu metodą bezpośredniego porównania z
wzorcem.
W układzie przedstawionym na rysunku wykorzystuje się ideę ważenia
(zresztą niekiedy układ ten jest nazywany wagą prądową). Przez cewkę
elektromagnesu przepływa mierzony prąd I
X
powodując przyciąganie
ferromagnetycznej masy umieszczonej na ramieniu równoważni. Można też
wykorzystywać inne mechanizmy przyciągania, na przykład przyciąganie przez
elektromagnes magnesu lub przyciąganie drugiego elektromagnesu - ten
ostatni mechanizm najbliższy jest definicji ampera, jeśli elektromagnesy są
cewkami powietrznymi.
Pomiar natężenia
prądu przez
bezpośrednie
porównanie z prądem
wzorcowym:
a) układ otwarty,
b) układ z ujemnym
sprzężeniem
zwrotnym

Zmieniając wartość prądu wzorcowego, można doprowadzić wagę do równowagi
- stan równowagi jest wykrywany jako położenie wskazówki w pozycji zero.
Stan równowagi można ocenić też metodami elektrycznymi, na przykład mierząc
rezystancję Rx zależną od położenia suwaka potencjometru (rys).
Ważenie może być przy tym zrealizowane automatycznie - rezystor Rx
umieszcza się w jednym z ramion układu mostkowego.
Jeśli wszystkie rezystancje tego układu są jednakowe, napięcie na jego wyjściu
jest równe zeru (mostek jest w stanie równowagi).
Zmiana rezystancji Rx wywołana wyprowadzeniem równoważni ze stanu
równowagi spowoduje pojawienie się na wyjściu układu mostkowego sygnału
napięciowego.
Ten sygnał po wzmocnieniu powoduje pojawienie się prądu równoważącego
wagę (rys).
W ten sposób jest realizowane ujemne sprzężenie zwrotne - metoda radykalnie
poprawiająca dokładność pomiaru.
Pomiar natężenia prądu w układzie jak na rysunku może być realizowany
metodą zerową — przez doprowadzenie układu do stanu równowagi (wskazówka
w pozycji zero),
metodą różnicową - miarą badanego natężenia prądu jest wtedy odchylenie
wskazówki albo sygnał elektryczny- nierównowagi, lub
metodą zerowo--różnicową - układ jest wstępnie równoważony, a pomiarowi
podlega odchyłka od stanu równowagi. Umożliwia to zwiększenie czułości metody
przez zmniejszenie zakresu pomiarowego i poprawienie rozdzielczości
(rozróżnialnego progu mierzonej wielkości).
.
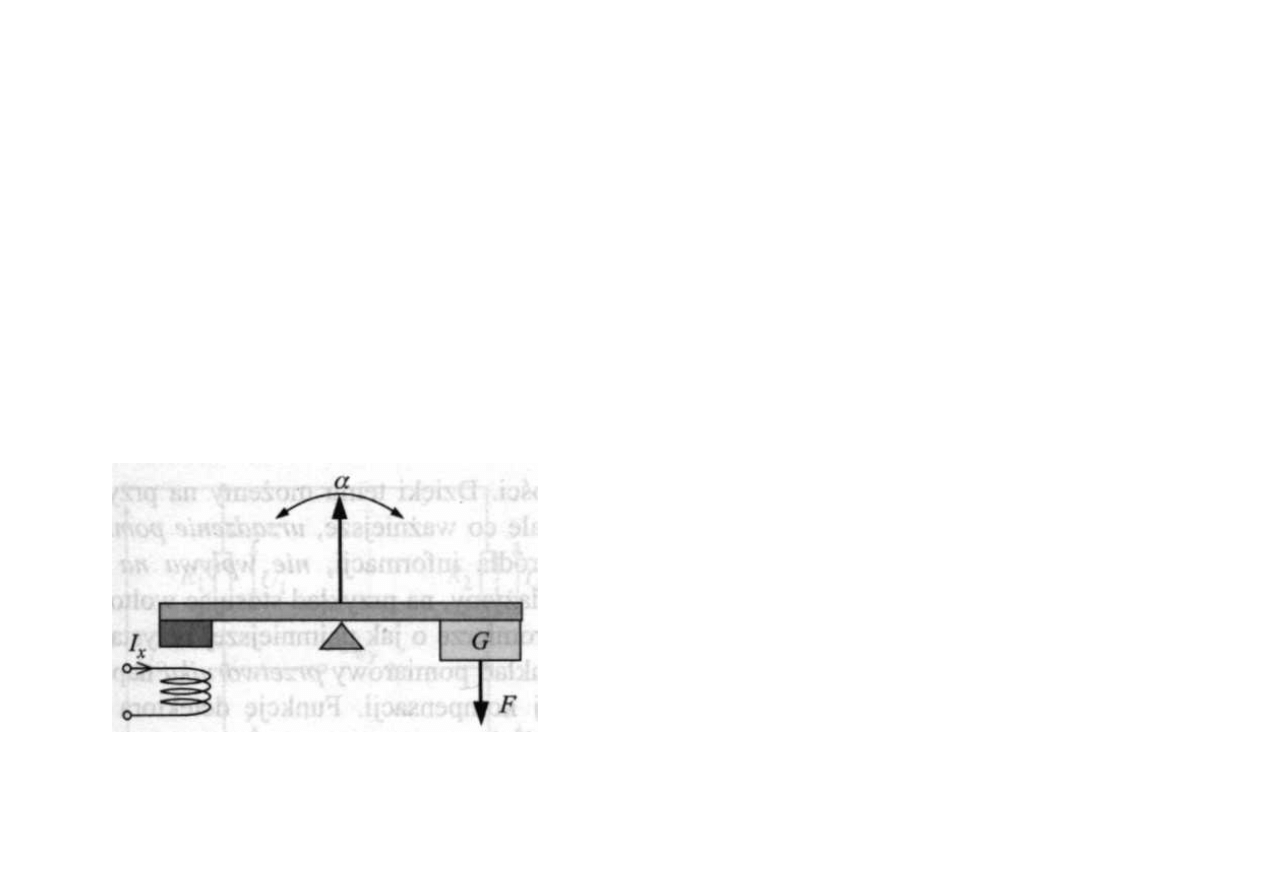
Pomiar natężenia prądu realizowany metodą
pośredniego porównania z wzorcem.
Siła przyciągania elektromagnesu, przez który
przepływa prąd mierzony I
x„
jest równoważona
siłą ciążenia F odważnika G.
Producent miernika może wyskalować
przyrząd, określając wartości odchylenia
wskazówki (lub wartości sygnału
nierównowagi) przez przepuszczenie przez
cewkę wartości wzorcowych prądu (często w
tym celu używa się przyrządu wzorcowego
zwanego kalibratorem).
Pośredni pomiar może być także realizowany bez uprzedniego skalowania
przyrządu prądem o wartości wzorcowej. Można bowiem określić zależność
między siłą F a wartością prądu Ix w postaci F = K Ix. Pomiarowi podlega więc
tym razem nie wartość prądu, lecz wartość siły F, a badany prąd Ix jest
określany dzięki znajomości stałej K.
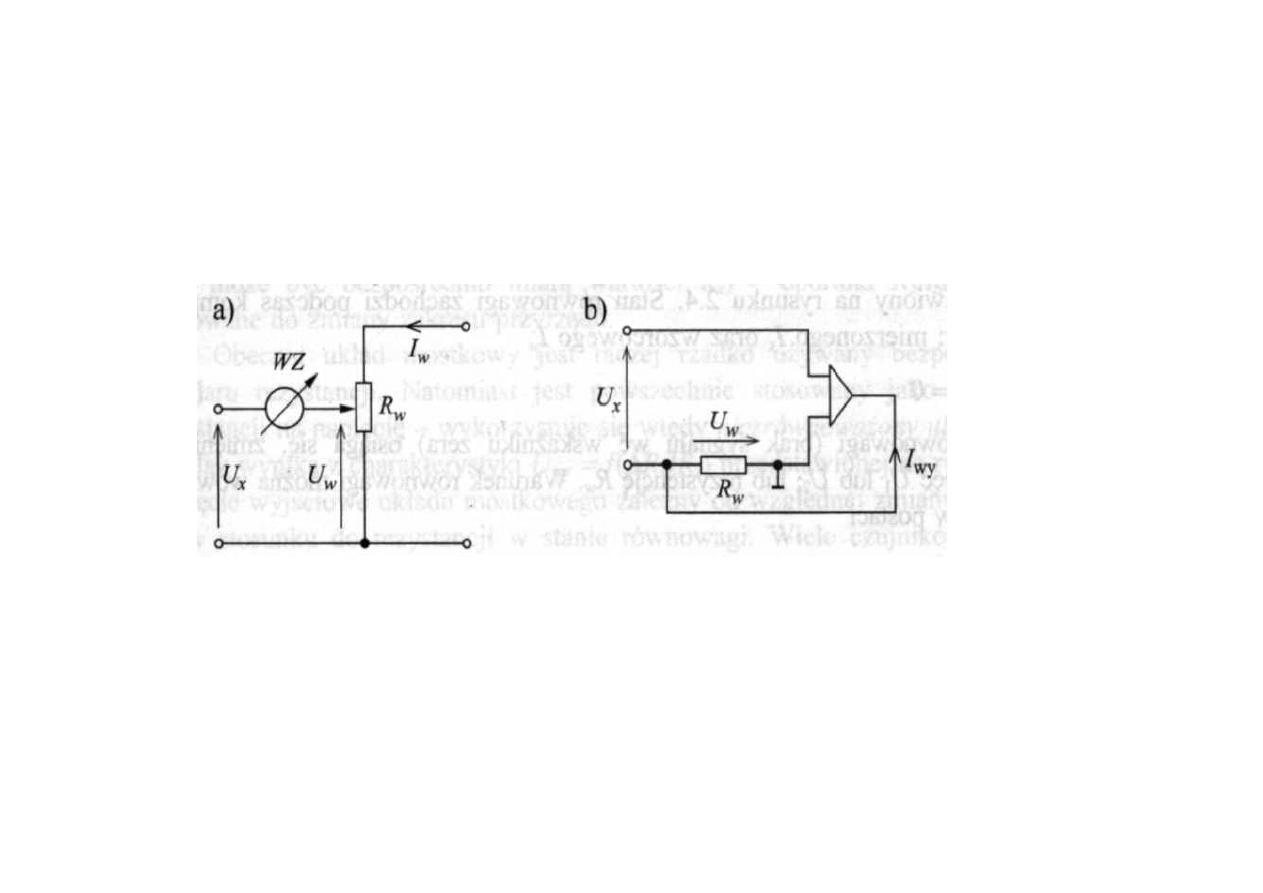
Pomiar napięcia metodą kompensacyjną: a) zasada metody kompensacji,
b) układ kompensacyjny z ujemnym sprzężeniem zwrotnym
Mierzoną wielkość można porównywać z wzorcem metodą kompensacyjną.
Metoda kompensacyjna jest jedną z najdokładniejszych.
Dodatkową ważną zaletą kompensacji napięcia jest brak poboru prądu z
mierzonego źródła napięcia, co oznacza, że rezystancja wejściowa
woltomierza kompensacyjnego jest bliska nieskończoności.

Oprócz metody kompensacyjnej (odejmowanie dwóch sygnałów) stosuje się też
metodę komparacyjną, w której porównuje się dwa sygnały, a dokładniej określa
się stosunek dwóch sygnałów.
Przykład komparatora dwóch rezystancji jest przedstawiony na rysunku.
Stan równowagi zachodzi podczas kompensacji prądów:
mierzonego Ix oraz wzorcowego /w,
Stan równowagi (brak sygnału we wskaźniku zera) osiąga się, zmieniając
wartości napięć U\ lub U2, lub rezystencję Rw.
Warunek równowagi można wówczas przedstawić w postaci
Komparator prądu stałego (direct current comparator, DCC) jest obecnie
stosowany przez NIST (National Institute of Standard and Technology, USA)
jako bardzo dokładna metoda odtwarzania wzorca rezystancji .

Oprócz metody kompensacyjnej (odejmowanie dwóch sygnałów) stosuje się też
metodę komparacyjną, w której porównuje się dwa sygnały, a dokładniej określa
się stosunek dwóch sygnałów.
Przykład komparatora dwóch rezystancji jest przedstawiony na rysunku.
Stan równowagi zachodzi podczas kompensacji prądów:
mierzonego Ix oraz wzorcowego /w,
Stan równowagi (brak sygnału we wskaźniku zera) osiąga się, zmieniając
wartości napięć U\ lub U2, lub rezystencję Rw.
Warunek równowagi można wówczas przedstawić w postaci
Komparator prądu stałego (direct current comparator, DCC) jest obecnie
stosowany przez NIST (National Institute of Standard and Technology, USA)
jako bardzo dokładna metoda odtwarzania wzorca rezystancji .
Wyszukiwarka
Podobne podstrony:
Metrologia Elektryczna i Elektroniczna wykład 3 i 4
METKA -ściaga z wykładu, Elektrotechnika PŁ, Inżynierskie, I st, 3 semestr, Metrologia elektryczna 2
Napęd Elektryczny wykład
Zarzadzanie firma Wydzial Elektryczny wyklad1
ElektronikaNst wyklad1 2
elektro wyklad 06
Elektrotechnika wyklad 2
El en i środowisko 13 14 1, Prywatne, EN-DI semestr 4, Elektroenergetyka, wykład + ćwiczenia
20'', Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, sprawozdania, Sprawozdania, Lab
FIG-02D, Elektrotechnika, PODSTAWY ELEKTROTECHNIKI, wyklad
Zadanie 3(1), Elektrotechnika, Rok 3, Napęd elektryczny, Napęd elektryczny wykład
elektro wyklad 04b
ElektrodynamikaII Wyklad6
Narazenia od pól elektromagnetycznych 13 14 1, Prywatne, EN-DI semestr 4, Elektroenergetyka, wykład
14'''''''''', Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, sprawozdania, Sprawozda
więcej podobnych podstron