
Metrologia II
1
Metrologia II
Metrologia II
Wykłady
Metrologia II
2
Wartość = Liczba · Jednostka; W= L · J
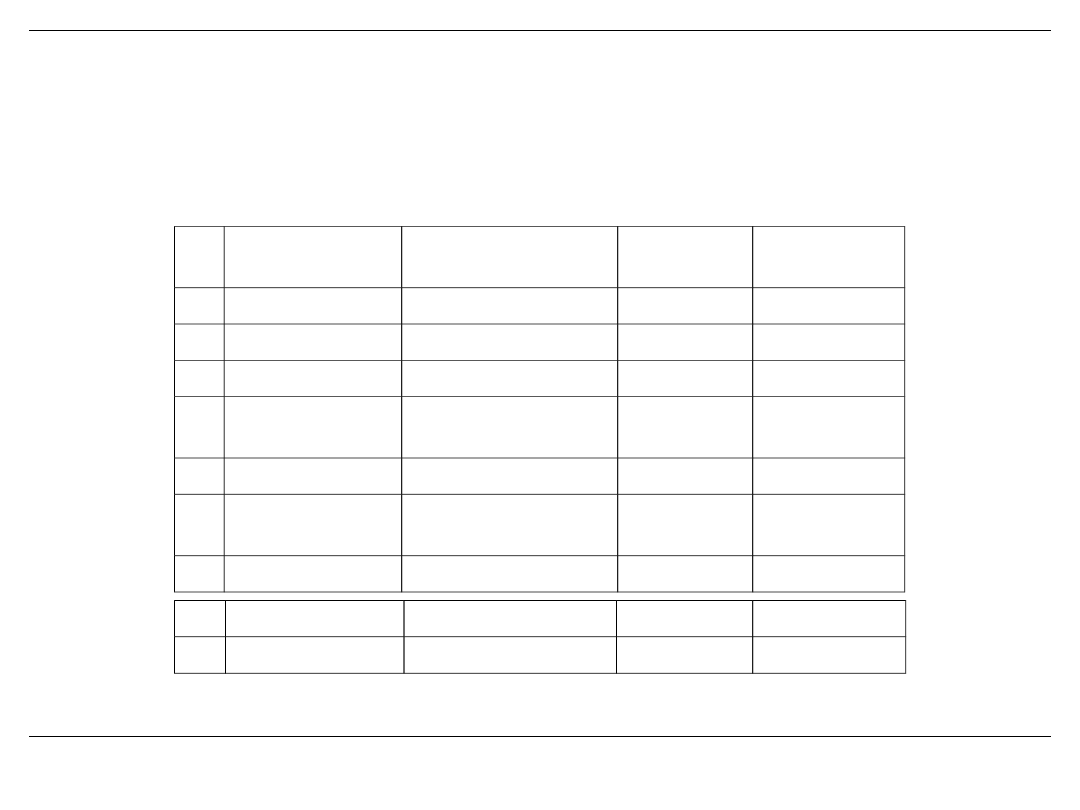
UKŁAD JEDNOSTEK SI
Jednostki podstawowe
Lp
Wielkość
Najczęstszy
symbol wielkości
Nazwa
jednostki
Symbol
jednostki
1
Długość
l, s
metr
m
2
Czas
t, τ
sekunda
s
3
Masa
m
kilogram
kg
4
Natężenie
prądu
I, i
amper
A
5
Temperatura
T
kelwin
K
6
Liczność
materii
N
mol
mol
7
Światłość
j
kandela
Cd
Jednostki uzupełniające
8
Kąt płaski
α, β, γ
radian
rad
9
Kąt bryłowy
ω, Ω
steradian
sr
Metrologia II
3
METR – długość drogi przebytej przez światło w próżni w czasie
1/299 792 458 sekundy.
SEKUNDA – czas trwania 919 263 1770 okresów promieniowania,
odpowiadającego przejściu między dwoma nadsubtelnymi poziomami stanu
podstawowego atomu cezu 133.
KILOGRAM – masa międzynarodowego wzorca przechowywanego w
Międzynarodowym Biurze Miar w Sevres pod Paryżem.
Wzorzec ten wykonano ze stopu platynoirydowego jako walec o średnicy i
wysokości ok. 39 mm. Masa 1 kg może być odtworzona przez porównanie z
międzynarodowym wzorcem z dokładnością 0,002 mg/kg.
AMPER – natężenie prądu stałego, który płynąc w dwóch prostoliniowych,
równoległych, nieskończenie długich przewodach o znikomo małym przekroju
umieszczonych w próżni w odległości 1 m wywołuje siłę działającą między tymi
przewodami równą 2·10
-7
N na każdy metr długości przewodu.
KELWIN –
części temperatury termodynamicznej punktu potrójnej wody.
273,16
1
Metrologia II
4
MOL – ilość substancji układu zwierającego liczbę cząsteczek równą liczbie
atomów zawartych w masie 0,012 kg węgla 12.
Cząstkami mogą być: atomy, cząsteczki, jony, elektrony.
KANDELA – światłość (natężenie światła), jaką ma w kierunku prostopadłym pole
powierzchni 1/6·10
5
m
2
ciała doskonale czarnego, promieniującego w
temperaturze krzepnięcia platyny pod ciśnieniem 101 325 Pa.
RADIAN – płaski kąt środkowy koła wycinający z obwodu tego koła łuk o długości
równej jego promieniowi.
STERADIAN – kąt bryłowy o wierzchołku w środku kuli, wycinający z
powierzchni tej kuli pole równe kwadratowi jej promienia.
Metrologia II
5
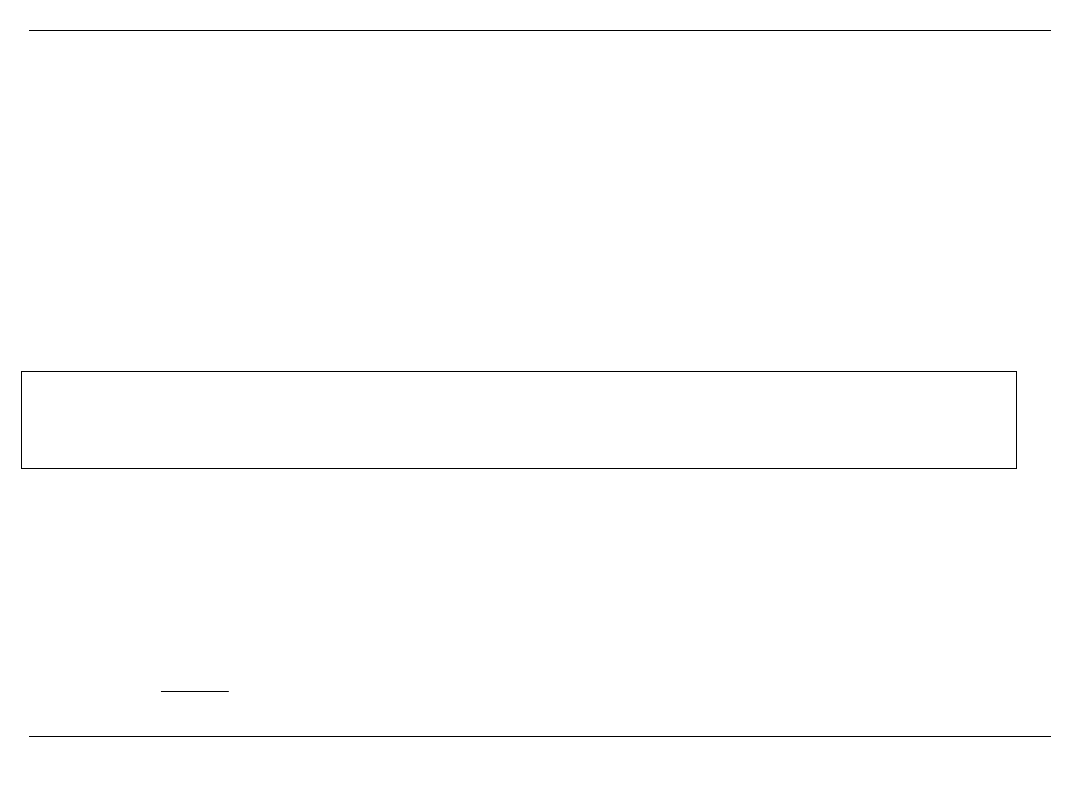
Jednostki pochodne wybranych wielkości - mechanicznych
L
p
Wielkość
Nazwa jednostki
miary
Symbol
jednostki
miary
Symbol
jednostki
1
Powierzchnia
metr kwadratowy
m
2
1 m
2
2
Objętość
metr sześcienny
m
3
1 m
3
3
Częstotliwość
Herc, 1 Hz = 1 :
(1s)
Hz
1 Hz = 1s
-1
4
Prędkość
liniowa
metr na sekundę
m/s
1 m·s
-1
5
Prędkość
kątowa
radian na
sekundę
rad/s
1 rad·s
-1
6
Przyśpieszenie
liniowe
metr na kwadrat
sekundy
m/s
2
1 m·s
-2
7
Przyśpieszenie
kątowe
radian na
kwadrat sekundy
rad/s
2
1 rad·s
-2
8
Gęstość
(masy)
kilogram na metr
sześcienny
kg/m
3
1 kg·m
-3
9
Pęd
kilogramometr na
sekundę
(kg·m)/s
1 kg·m·s
-1
1
0
Siła
niuton
1 N = 1 kg · (1
m/s
2
)
N
1 N =
1kg·m· s
-2
1
1
Moment siły
niutonometr
N ·m
1 N·m =
= 1 kg·m
2
·s
-2
Metrologia II
6
1
2
Ciśnienie,
naprężenie
mechaniczne
paskal
1 Pa = 1 N : (1
m
2
)
Pa
1 Pa =1
kg·m
-1
·s
-2
1
3
Napięcie
powierzchniow
e
niuton na metr
N/m
1 N/m = 1
kg·s
-2
1
4
Energia, praca
dżul
1J = 1 N · 1 m
J
1 J = 1
kg·m
2
·s
-2
1
5
Udarność
dżul na metr
kwadratowy
J/m
2
1 kg·s
-2
1
6
Moc
wat
1 W = 1 J : (1 s)
W
1 W = 1
kg·m
2
·s
-3
1
7
Gęstość mocy
wat na metr
kwadratowy
W/m
2
1 kg·s
-3
1
8
Lepkość
dynamiczna
paskalosekunda
Pa·s
1 kg·m
-1
·s
-1
1
9
Lepkość
kinematyczna
metr kwadratowy
na sekundę
m
2
/s
1 m
2
·s
-1
2
0
Strumień
objętości
metr sześcienny
na sekundę
m
3
/s
1 m
3
·s
-1
2
1
Strumień masy
kilogram na
sekundę
kg/s
1 kg·s
-1
2
2
Gęstość
strumienia
masy
kilogram na
sekundę i metr
kwadratowy
kg/
(s·m
2
)
1 kg·m
-2
·s
-1
Metrologia II
7
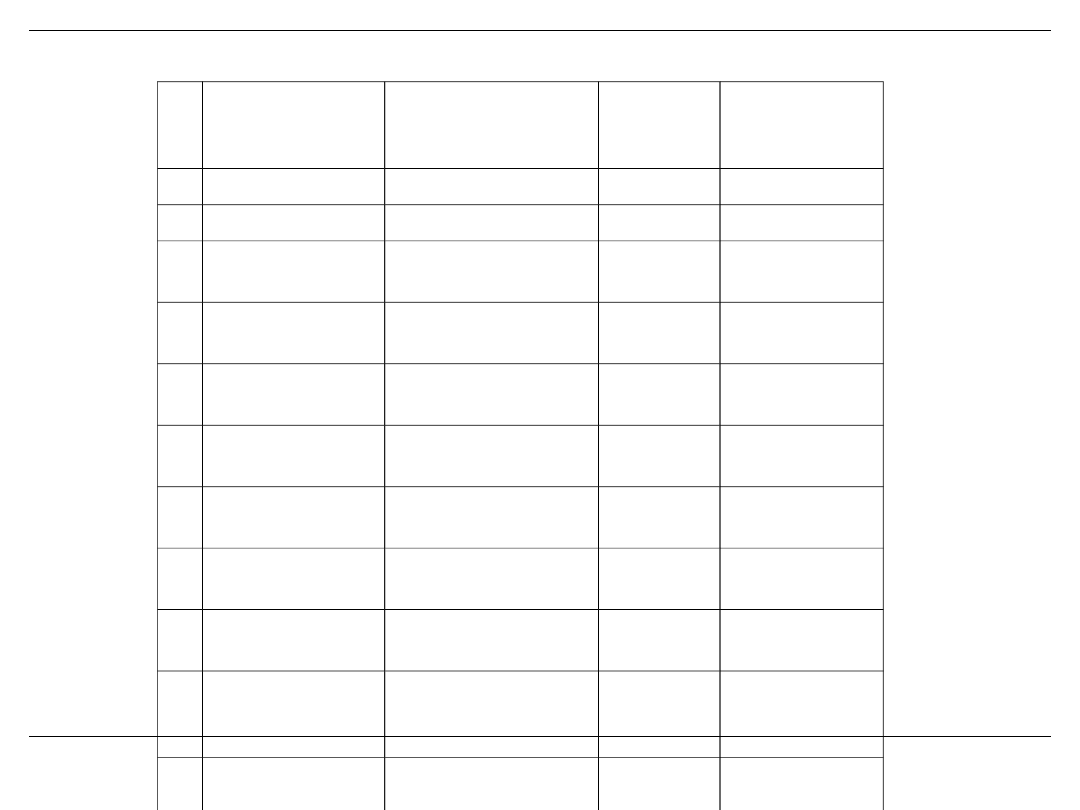
Jednostki pochodne wybranych wielkości elektrycznych
Lp
Wielkość
Nazwa jednostki
miary
Symbol
jednost
ki
miary
Zależność od
jednostek
podstawowych i
uzupełniających
1
Ładunek
elektryczny
kulomb
1 C = 1 A·1 s
C
1 C = 1 A·s
2
Napięcie
elektryczne
wolt
1 V = 1 W : (1 A)
V
1 V = 1 kg ·m
2
·s
-3
·A
-
1
3
Pojemność
elektryczna
farad
1 F = 1 C : (1 V)
F
1 F = 1 kg
-1
·m
-
2
·s
4
·A
2
4
Opór
elektryczny
om
1 Ω = 1 V : (1 A)
Ω
1 Ω = 1 kg·m
2
·s
-3
·A
-2
5
Strumień
magnetyczny
weber
1 Wb = 1 V
·1 s
Wb
1 Wb = 1 kg ·m
2
·s
-2
·A
-1
6
Indukcja
magnetyczna
tesla
1 T = 1 Wb : (1 m
2
)
T
1 T = 1 kg ·s
-2
·A
-1
7
Indukcyjność
henr
1 H = 1 V : [1 A :
(1 s)]
H
1 H = 1 kg ·m
2
·s
-2
·A
-2
Metrologia II
8
Wybrane legalne jednostki miar nie należące do układu SI
Lp
.
Wielkość
Nazwa jednostki
miary
Symbol
jednostki
miary
Relacje między
podaną jednostką
a jednostką SI
1
Masa
tona
t
1 t = 1 Mg =
10
3
kg
2
Czas
minuta, godzina,
doba
min; h; d
1 min = 60 s
1 h =
3600 s
1 d =
84600 s
3
Temperatura
stopień Celsjusza
°C
Dla różnicy
temperatur
1 °C = 1 K
t
c
= T
k
– 273,15
4
Kat płaski
stopień; minuta;
sekunda
[°]; [‘]; ["]
5
Powierzchnia
hektar
ha
1 ha = 10
4
m
2
6
Objętość
litr
l
1 l = 10
-3
m
3
7
Prędkość liniowa
kilometr na
godzinę
km/h
8
Prędkość kątowa
obrót na minutę;
obrót na sekundę
obr/min;
obr/s
1 obr/s = 2π rad·s
-1
9
Energia, Praca
kilowatogodzina
kWh
1 kWh = 3,6·10
6
J
10
Moc
woltamper
VA
1VA = 1 W
rad
180
π
1
rad
60
1
1
'
rad
60
1
1
'
''
1
-
s
m
3,6
1
h
km
1
1
-
s
rad
60
2π
obr/min
1
Metrologia II
9
Spójność jednostek
E = F · l
1 J = 1 N · 1 m
1 N = 1 kg · 1m/s
2
1 J = kg m s
-2
ROZSZERZANIE ZAKRESU JEDNOSTEK UKŁADU SI
wykładniki dodatnie: (1) – deka
da
; (2) – hekto
h
; (3) – kilo
k
; (6) – mega
M
;
(9) – giga
G
; (12) – tera
T
; (15) – peta
P
; (18) – eksa
E
;
(21) – zeta
Z
; (24) – yotta
Y
wykładniki ujemne: (-1) – decy
d
; (-2) – centy
c
; (-3) – mili
m
; (-6) – mikro
μ
;
(-9) – nano
n
; (-12) – piko
p
; (-15) – femto
f
; (-18) – atto
a
;
(-21) – zepto
z
; (-24) – yocto
y
Zalety układu SI
UNIWERSALNOŚĆ – zapewnia każdej wielkości jednostkę miary, nazwę jednostki, skrót
nazwy
jednostki, wymiar jednostki.
SPÓJNOŚĆ – wszystkie jednostki główne układu przyjmują w równaniach
definicyjnych
współczynniki równe jedności.
A
F
p
I
U
R
2
-
1
-
2
s
m
kg
m
1
N
1
Pa
1
A
1
V
1
Ω
1
Metrologia II
10
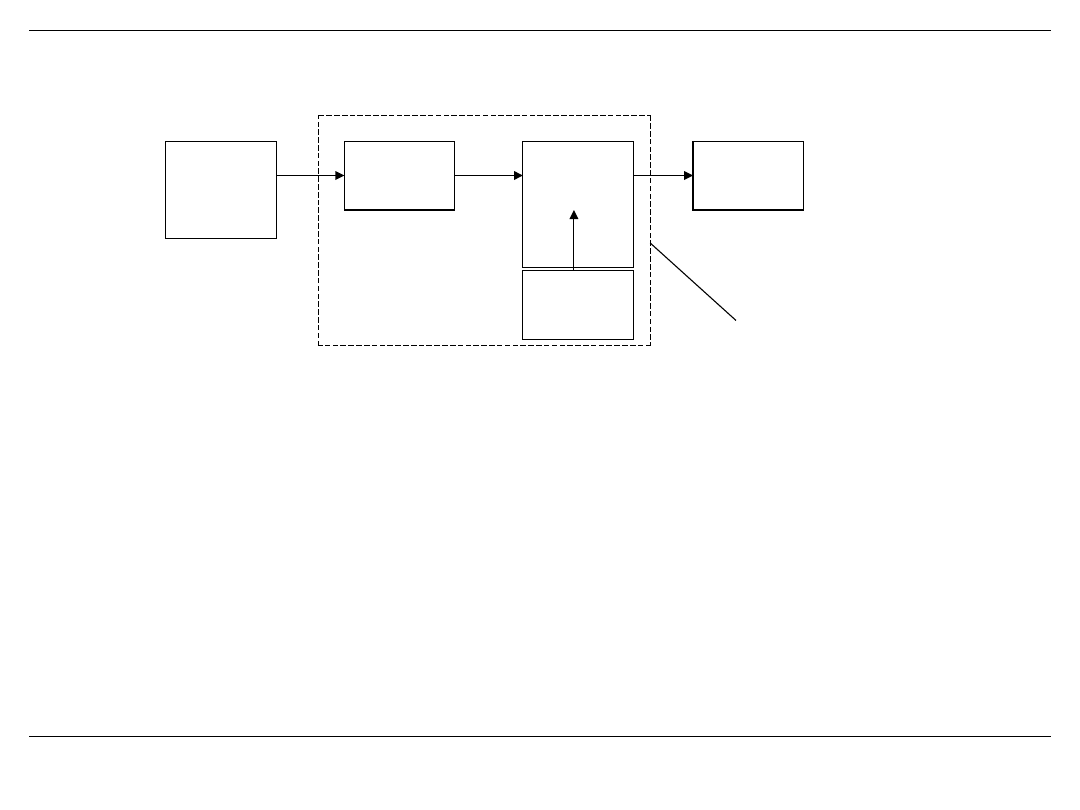
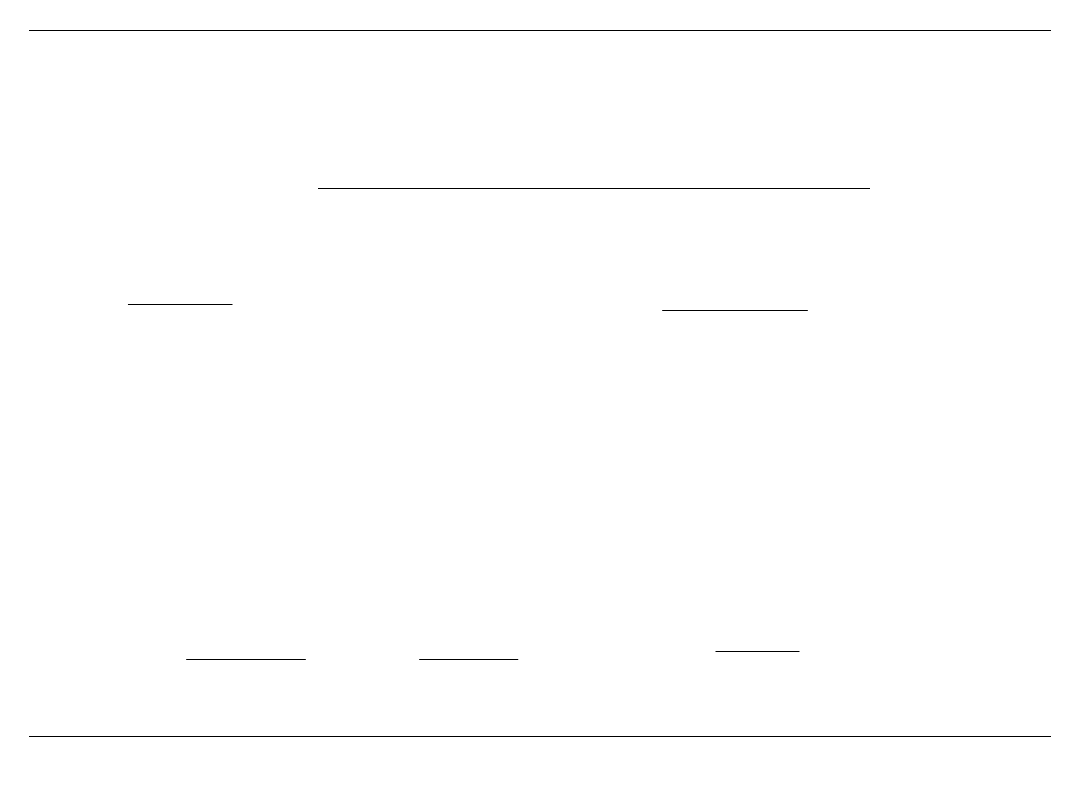
REALIZACJA POMIARÓW
WZORZEC – narzędzie pomiarowe odtwarzające jednostkę
miary lub jej
wielokrotność.
PRZYRZĄD POMIAROWY – narzędzie pomiarowe ułatwiające wykonanie
pomiaru czyli
porównanie wartości wielkości mierzonej ze
wzorcem.
PRZETWORNIK POMIAROWY – narzędzie pomiarowe przekształcające wielkość
mierzoną na
wielkość wyjściową , której wartość jest
porównywana ze
wzorcem.
Źródło
sygnał
u
Przetw
ornik
Przyrz
ąd
pomiar
.
Obser
wator
Wzorz
ec
narzędzi
e
pomiaro
we
x
y
c
Metrologia II
11
Klasyfikacja metod pomiarowych
Podział metod ze względu na sposób uzyskiwania wyników pomiaru:
- bezpośrednie
- pośrednie
- złożone
Podział metod ze względu na sposób porównywania wartości wielkości mierzonej
i wzorcowej:
- bezpośredniego porównania
- różnicowe
- zerowe
- podstawieniowe
Metrologia II
12
BŁĘDY POMIARU
Rzeczywisty bezwzględny ; x
r
- wartość rzeczywista
Rzeczywisty względny ; x
z
- wartość zmierzona
Bezwzględny graniczny ;
Graniczny względny
Wynik pomiaru podaje się w formie:
ponieważ wartość x
r
nie jest znana do wyznaczenia δ
x
korzysta się z warunku:
wówczas i można napisać:
lub
r
z
r
x
x
x
r
r
z
rx
x
x
x
|
|
|
|
r
z
gr
x
x
x
)
,
(
gr
z
gr
z
r
x
x
x
x
x
r
x
x
x|
|
r
gr
z
x
x
r
r
z
x
x
x
|
|
z
gr
x
x
x |
|
%
100
|
|
z
gr
x
x
x
Metrologia II
13
Klasyfikacja błędów ze względu na przyczyny ich występowania
- systematyczne
- przypadkowe
- omyłki
Klasyfikacja błędów ze względu na charakter zmienności mierzonych wartości
-
statyczne
- dynamiczne
Klasyfikacja błędów ze względu na warunki odniesienia
- podstawowe
- dodatkowe
Metrologia II
14
OBLICZANIE BŁĘDÓW
Obliczanie błędów systematycznych
Pomiar bezpośredni przyrządem pomiarowym
W tym przypadku wartość błędu jest równa wartości granicznego błędu
bezwzględnego Δx
gr
, który wylicza się znając klasę dokładności δ
m
przyrządu.
Pomiar tej samej wartości x wielkości fizycznej X kilkoma przyrządami o różnej dokładności
Wyniki poszczególnych pomiarów:
;
1
1
gr
z
x
x
;
2
2
gr
z
x
x
grn
zn
x
x
…..;
Wynik końcowy
: - ; -
średnia
ważona
w
w
gr
z
x
x
x
x
_
w
x
_
%
100
min
max
x
x
x
gr
m
%
100
)
(
min
max
x
x
x
m
gr
=>
n
i
i
n
i
zi
i
w
w
x
w
x
1
1
_
n
i
i
n
i
gri
i
w
w
x
w
x
1
1
2
)
(
gri
i
x
K
w
Metrologia II
15
2
2
2
1
1
s
1
s
1
w
w
100
4
3
w
w
10000
5
w
;
;
621
,
16
10000
100
100
1
1
62
,
16
10000
6
,
16
100
7
,
16
100
17
1
16
1
_
w
x
s
62
16,
_
w
x
012
,
0
10000
100
100
1
1
01
,
0
10000
1
,
0
100
1
,
0
100
1
1
1
1
w
x
s
01
0,
w
x
; Wynik pomiaru: 16,62 ± 0,01 s
Przykład
Czas ruchu pojazdu zmierzyło kilka osób posługując się miernikami o różnej
dokładności. Uzyskano wyniki pomiarów t
1
= 16 ± 1 [s]; t
2
= 17 ± 1 [s]; t
3
= 16,7 ± 0,1
[s]; t
4
= 16,6 ± 0,1 [s]; t
5
= 16,62 ± 0,01 [s]. Obliczyć średni ważony czas ruchu oraz
systematyczny błąd pomiaru.
Obliczenia
Przyjęto stałą K = 1 [s
2
], wówczas wartości wag dla poszczególnych pomiarów
wynoszą:
Metrologia II
16
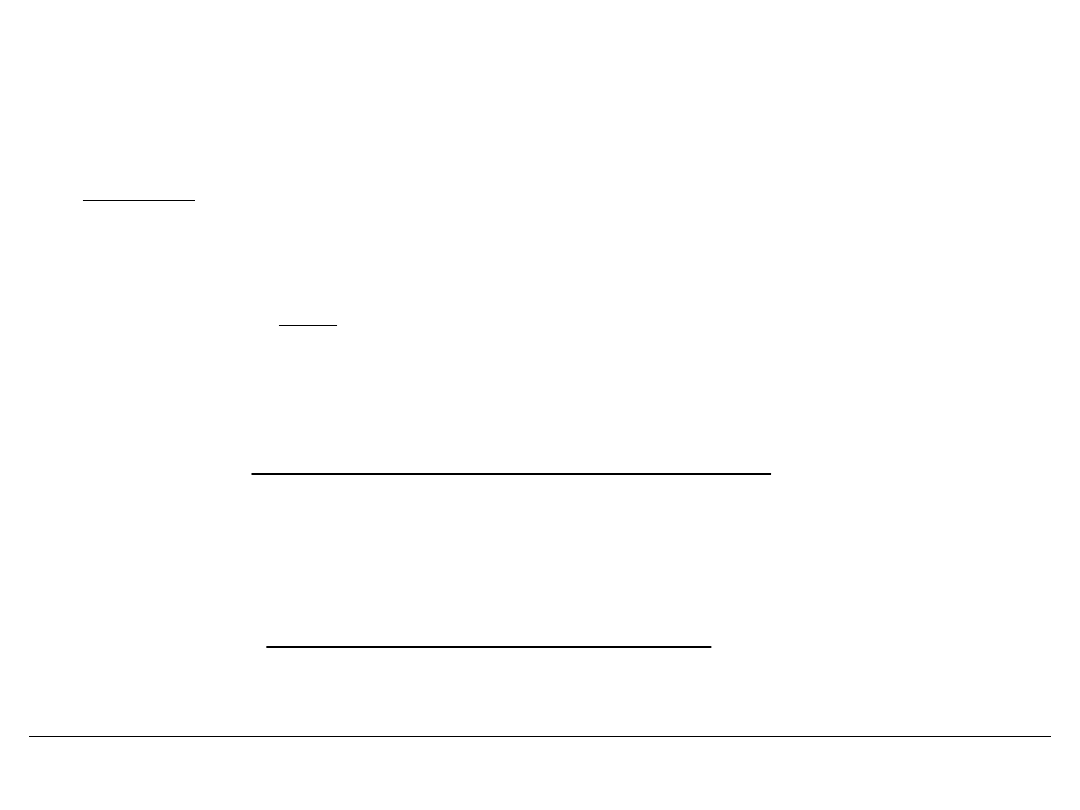
Pomiar bezpośredni przyrządem pomiarowym z uwzględnieniem źródeł
błędów w prostym torze pomiarowym
ŹRÓDŁA BŁĘDÓW W PROSTYM TORZE POMIAROWYM
Źródło
wielkości
mierzonej
Doprowadzeni
e do przyrz.
pomiarowego
Przyrząd
pomiarowy
Obserwator
Opracowanie
wyniku
Wynik
błąd pobrania błąd przyrządu błąd odczytu błąd
opracowania
E
v
E
R
R
E
E
1
1
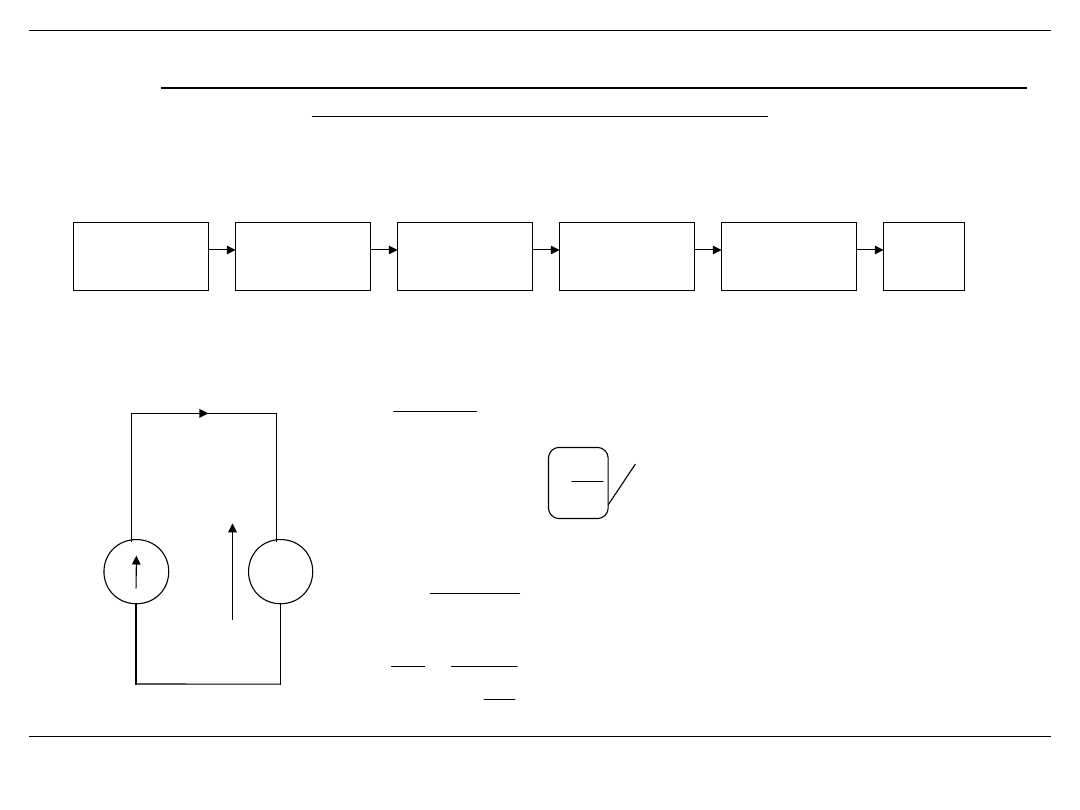
Przykład pomiaru napięcia źródła woltomierzem
E
R
E
R
V
+
-
V
I
E
v
R
R
E
I
E
v
R
I
R
I
E
v
R
I
U
,
,
poprawka
E
E
v
v
R
I
IR
R
I
R
I
E
U
E
v
E
E
R
R
U
U
R
I
U
E
E
E
v
R
R
R
E
E
dokładność pomiaru
Metrologia II
17
Zasady zaokrąglania wyników pomiarów
W przypadku danych pochodzących z pomiaru liczba miejsc znaczących w wyniku jest
określona przez najmniejszą jednostkę wielkości mierzonej. Przy zaokrąglaniu zostawia się
jedynie cyfry znaczące wg następujących zasad:
1. Jeżeli pierwsza z odrzuconych cyfr jest większa od 5 lub równa 5 ale za nią są jeszcze
cyfry większe od zera, to ostatnią z zachowanych cyfr należy zwiększyć o 1, np.
0,3736 → 0,374;
0,37353 → 0,374.
2. Jeżeli odrzuconą cyfrą jest 5, a za nią nie ma cyfr większych od zera to ostatnią cyfrę,
jeśli jest parzysta zachowuje się bez zmiany, jeśli jest nieparzysta zwiększa się o 1,
np. 0,3735 →
0,374; 0,3785 → 0,378.
3. Jeżeli pierwsza z odrzuconych cyfr jest mniejsza od 5 to ostatnia z pozostałych cyfr nie
ulega zmianie, np. 0,3791 → 0,379
Metrologia II
18
Zasady wykonywania działań na liczbach, które są wynikami pomiarów
1. Przy odejmowaniu i dodawaniu składniki zaokrągla się do rzędu o jeden niższego niż
rząd
najmniej dokładnej liczby, zaś w wyniku zachowuje się tyle cyfr dziesiętnych ile
jest w
składniku o najmniejszej liczbie cyfr dziesiętnych, np.
0,335 + 2,21 + 24,6 ≈ 0,34 + 2,21 + 24,6 ≈ 27,15 ≈ 27,2
2. Przy mnożeniu i dzieleniu w wyniku zachowuje się tyle cyfr znaczących ile występuje w
liczbie o najmniejszej liczbie cyfr znaczących, np. 26,8 : 1,23 ≈ 21,7
3. Przy potęgowaniu w wyniku zachowuje się tyle cyfr znaczących ile cyfr zawiera
podstawa
potęgowa, np.
4. Przy logarytmowaniu w wyniku należy podać tyle cyfr ile cyfr zawiera liczba
logarytmowana, np.
5. Przy pierwiastkowaniu w wyniku zachowuje się tyle cyfr, ile cyfr znaczących występuje w
liczbie pierwiastkowej, np.
7
31
6969
31
63
5
2
,
,
,
.
894
,
1
894426
,
1
42
,
78
lg
72
,
1
723
,
1
97
,
2
Metrologia II
19
Pomiary pośrednie z wykorzystaniem pomiarów bezpośrednich
Wielkość Y jest związana z wielkościami X
1
, X
2
,…, X
n
zależnością:
Y = f(X
1
, X
2
,…, X
n
) (1)
Wyznaczyć graniczny błąd pomiaru Δy
gr
wielkości Y, której wartość y określono w sposób
pośredni z zależności (1) na podstawie znajomości wartości: x
1
, x
2
,… x
n
zmierzonych
bezpośrednio, jeżeli graniczne błędy tych pomiarów wynosiły: Δx
1
, Δx
2
,… Δx
n
.
Wartość zmierzoną y wyznacza się z zależności:
Wartość rzeczywistą y
o
określa zależność:
Błąd bezwzględny wielkości mierzonej pośrednio:
Błędy bezwzględne wielkości mierzonych bezpośrednio:
Po przekształceniach
)
,...,
,
(
2
1
n
x
x
x
f
y
)
,...,
,
(
0
20
10
0
n
x
x
x
f
y
)
,...
,
(
)
,...
,
(
0
20
10
2
1
0
n
n
x
x
x
f
x
x
x
f
y
y
y
,
10
1
1
x
x
x
Δ
20
2
2
x
x
x
0
n
n
n
x
x
x
, ……..,
1
1
10
x
x
x
2
2
20
x
x
x
n
n
n
x
x
x
0
,
, ……..,
Metrologia II
20
Po rozwinięciu odjemnika w szereg Taylora w otoczeniu punktów x
i0
jest:
Wykonując działania przy opuszczeniu wyrażeń zawierających iloczyny małych co do wartości
błędów granicznych Δx
i
lub ich potęgi o wykładnikach większych niż dwa otrzymuje się
wyrażenie:
Błąd bezwzględny wielkości mierzonej pośrednio można zapisać:
)
,.......,
,
(
)
,......,
,
(
n
n
n
x
x
x
x
x
x
f
x
x
x
f
y
y
y
2
2
1
1
2
1
0
n
m
n
n
n
n
n
n
n
n
n
n
X
X
X
f
x
X
x
X
x
X
m
X
X
X
f
x
X
x
X
x
X
X
X
X
f
x
X
x
X
x
X
x
x
x
f
x
x
x
f
y
,......,
,
......
!
.....
.....
,......,
,
......
!
,......,
,
......
,......,
,
,......,
,
)
(
)
(
2
1
2
2
1
1
2
1
2
2
2
1
1
2
1
2
2
1
1
2
1
2
1
1
2
1
n
n
n
X
X
X
f
x
X
x
X
x
X
y
,.....,
,
......
2
1
2
2
1
1
zwane różniczką zupełną.
Metrologia II
21
Maksymalna wartość błędu granicznego wynosi:
zależność wyraża prawo
Prawdopodobny błąd bezwzględny pomiaru:
n
n
gr
X
Y
x
X
Y
x
X
Y
x
y
......
2
2
1
1
(2)
m
m
X
Y
x
X
Y
x
X
Y
x
y
.........
2
2
1
1
max
sumowania
błędów
2
2
2
2
2
1
1
.........
m
m
x
X
Y
x
X
Y
x
X
Y
y
Metrologia II
22
SZCZEGÓLNE PRZYPADKI ZALEŻNOŚCI FUNKCYJNYCH
1. Suma Y = X
1
+ X
2
2. Różnica Y = X
1
– X
2
3. Iloraz
4. Iloczyn Y= X
1
· X
2
;
gr
gr
gr
x
x
y
2
1
2
1
2
1
x
x
x
x
y
y
gr
gr
gr
gr
|
|
|
|
gr
gr
gr
x
x
y
2
1
2
1
2
1
x
x
x
x
y
y
gr
gr
gr
gr
|
|
|
|
2
1
X
X
Y
2
2
2
1
2
1
|
|
|
|
x
x
x
x
x
y
gr
gr
gr
2
2
1
1
x
x
x
x
y
y
gr
gr
gr
gr
;
;
|
|
|
|
gr
gr
gr
x
x
x
x
y
2
2
1
1
2
2
1
1
x
x
x
x
y
y
gr
gr
gr
gr
Metrologia II
23
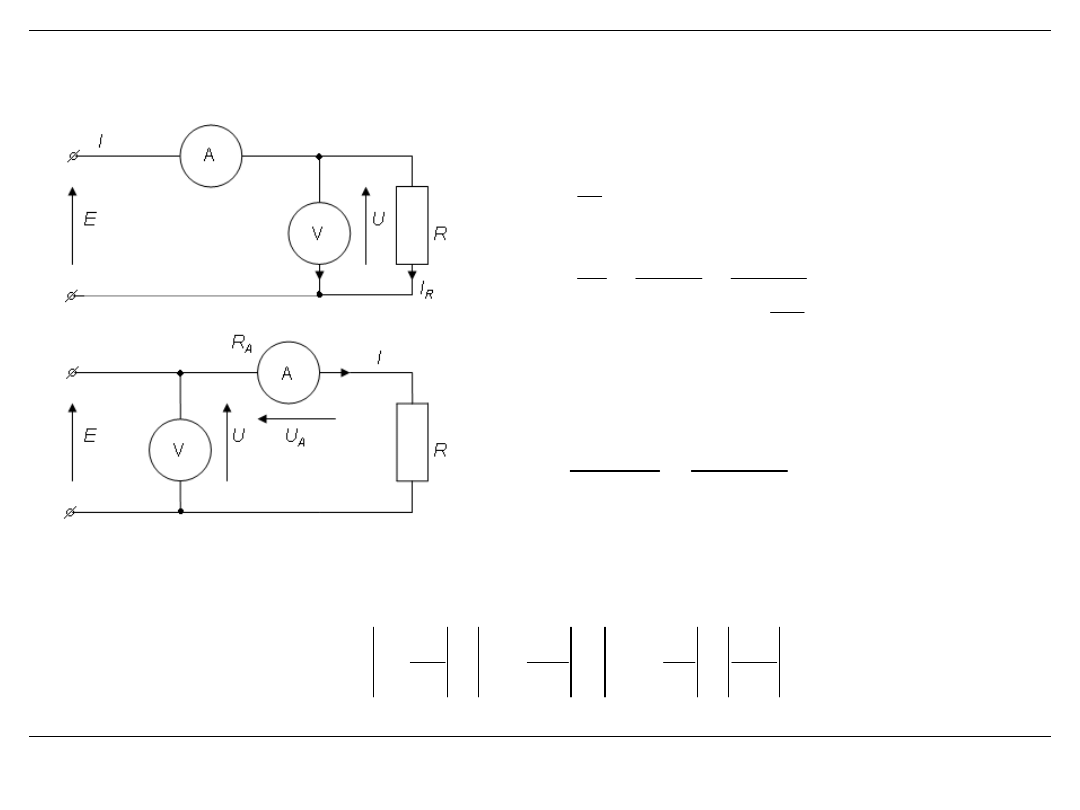
Przykład pośredniego pomiaru rezystancji metodą techniczną
I
U
R
z
V
V
R
R
R
U
I
U
I
I
U
I
U
R
A
z
A
A
R
R
R
I
IR
U
I
U
U
R
Dla obu przypadków po wyeliminowaniu błędów systematycznych należy wyznaczyć błąd
graniczny ΔR wynikający z pomiaru pośredniego, zgodnie z prawem sumowania się błędów:
I
U
I
U
I
U
R
U
I
R
I
R
2
I
v
Metrologia II
24
Przykład
Na podstawie bezpośrednich pomiarów napięcia U na oporniku i płynącego przez niego prądu
I
wyznaczono rezystancję R opornika z zależności: Parametr przyrządów:
woltomierz: zakres U
max
= 100 V, klasa dokładności
amperomierz: zakres
I
max
=500 mA, klasa dokładności
Wyznaczyć rezystancję R jeżeli odczyty z przyrządów wynoszą
I
U
R
2
,
0
mU
1
,
0
mU
V
74
z
U
mA
400
z
I
Rozwiązanie
Błąd graniczny pomiaru napięcia
V
2
0
100
V
100
2
0
100
,
%
%
,
%
max
U
U
mU
gr
Błąd graniczny pomiaru prądu
:
mA
5
0
100
mA
500
1
0
100
,
%
%
,
%
max
I
I
mI
gr
Wyznaczona wartość rezystancji:
Ω
185
A
4
0
V
74
,
z
z
z
I
U
R
Błąd graniczny wyznaczenia rezystancji:
Ω
5
2
Ω
3125
2
Ω
5
0
A
005
0
A
16
0
V
74
A
4
0
V
2
0
2
2
,
,
,
,
,
,
,
gr
z
z
z
gr
gr
gr
gr
I
I
U
I
U
I
I
R
U
U
R
R
Wynik pomiaru
]
Ω
[
5
,
2
185
Metrologia II
25
Błędy przypadkowe
Załóżmy, że wykonując n pomiarów pewnej wielkości X wykonanych w tych samych
warunkach uzyskano zbiór wartości { x
1
, x
2
, ….,x
i
, ….,x
n
}, nazwany próbą losową, w której
liczba pomiarów n nazywa się licznością próby. Finałem przeprowadzonego eksperymentu
jest uzyskanie wyniku pomiaru, to znaczy wyznaczenie wartości zmierzonej x
z
oraz błędu
granicznego Δx
gr
. Wynik pomiary podaje się wówczas w formie
gr
z
x
x
W przedziale
mieści się wartość rzeczywista x
r
mierzonej wielkości
z prawdopodobieństwem P.
gr
z
gr
z
x
x
x
x
,
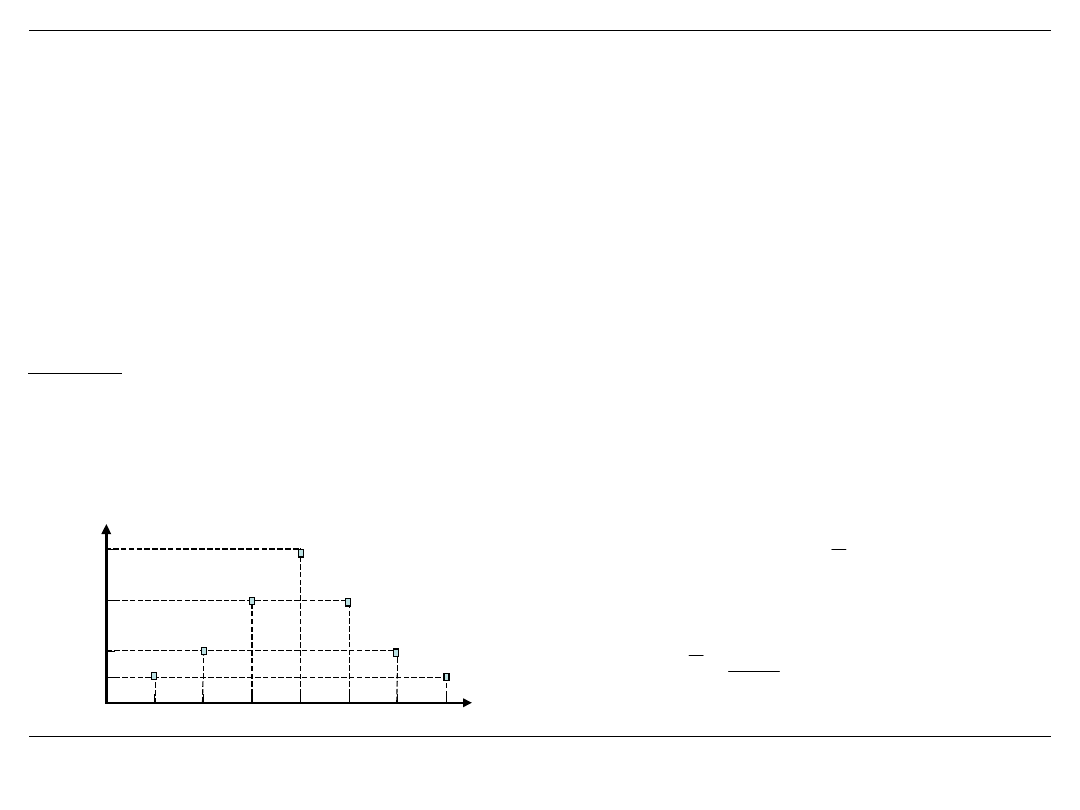
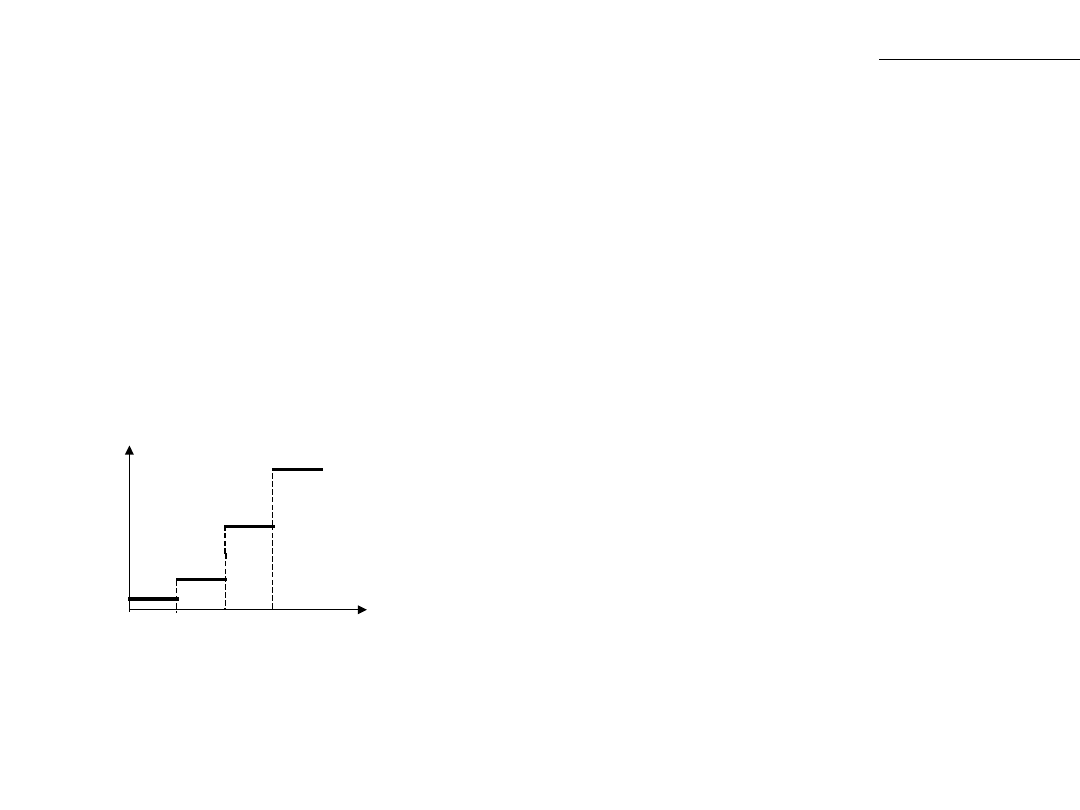
Przykład
Wykonano serię pomiarów manometrem
,
o liczności próby n = 100 tej samej wartości ciśnienia
dokonując odczytów na skali przyrządu. Odczytano następujące wartości ciśnień: n
1
= 30
odczytów p
1
= 2 kPa; n
2
= 20 odczytów p
2
= 1,99 kPa; n
3
= 20 odczytów p
3
= 2,01 kPa; n
4
= 10
odczytów p
4
= 1,89 kPa; n
5
= 10 odczytów p
5
= 2,02; n
6
= 5 odczytów p
6
= 1,97 kPa;
n
7
= 5 odczytów p
7
= 2,02 kPa. Prawdopodobieństwa uzyskania określonej wartości ciśnienia
wynoszą: P
1
= 0,3; P
2
= 0,2; P
3
= 0,2; P
4
= 0,1; P
5
= 0,1; P
6
= 0,05; P
7
= 0,05. Rozkład
prawdopodobieństw przedstawia rysunek.
1,97 1,9
8
1,99
2,0
0
2,0
1
2,0
2
2,0
3
p
0,0
5
0,1
0,
2
0,
3
P(p
)
Najbardziej prawdopodobna wartość ciśnienia
wynosi p= 2 kPa. Jest to średnia
arytmetyczna uzyskana ze wszystkich 100
pomiarów, obliczona z zależności
n
p
p
n
i
i
1
p
Metrologia II
26
Przy występowania błędów przypadkowych wyniki jak i błędy pomiaru są dyskretnymi zmiennymi losowymi. Zmienną
losową, (w przypadku pomiarów wynik lub błąd pomiaru) można opisać za pomocą funkcji rozkładu prawdopodobieństwa,
która określa prawdopodobieństwo z jakim zmienna losowa X przyjmuje określone wartości x
p(x)=P [X = x]
Funkcja prawdopodobieństwa spełnia następujące warunki:
0 p(x) 1
i
i
x
p
1
)
(
b
i
x
a
i
x
i
x
p
b
X
a
P
)
(
Rozkład prawdopodobieństwa można przedstawić za pomocą funkcji F(x) zwanej dystrybuantą zmiennej losowej.
Wartość tej funkcji jest prawdopodobieństwem zdarzenia, polegającego na tym, że zmienna losowa X przyjmuje wartość
mniejszą od argumentu tej funkcji lub równą mu.
F(x) = P(X x)
F(x
)
x
Wartość dystrybuanty w punkcie x jest równa sumie wartości funkcji
rozkładu prawdopodobieństwa, dla tych argumentów x
i,
które są mniejsze
lub równe x.
)
(
)
(
x
x
i
i
x
p
x
F
Metrologia II
27
Zmienne losowe ciągłe
Jeżeli zmienna losowa
X jest zmienną losową ciągłą, tzn. w dowolnym przedziale przyjmuje
dowolną wartość,
to charakteryzuje ją funkcja f(x) zwana gęstością prawdopodobieństwa. Gęstość
prawdopodobieństwa f(x)
charakteryzuje się jako funkcję, która określa prawdopodobieństwo przyjęcia przez zmienną
losową X wartości w
przedziale (x, x + dx) równej f(x)dx. Prawdopodobieństwo przyjęcia przez zmienną losową X
wartości w określonym
przedziale (x
1
, x
2
) jest całką z funkcji f(x) w tym przedziale:
2
1
)
(
2
1
x
x
dx
x
f
x
X
x
P
Pole obszaru pod wykresem funkcji gęstości prawdopodobieństwa w odpowiednim
przedziale przedstawia prawdopodobieństwo z jakim zmienna losowa przyjmuje w nim
wartości x.
Rozkład normalny
Rozkład normalny, nazywany rozkładem Gaussa należy do najważniejszych rozkładów
zmiennej losowej ciągłej.
Jest to najczęściej wykorzystywany model rozkładu gęstości prawdopodobieństwa
wyników pomiarów obciążonych błędami przypadkowymi. Zmienna losowa X ma rozkład
normalny, jeżeli jej funkcja gęstości prawdopodobieństwa opisana jest zależnością:
2
2
2
)
(
2
1
x
e
x
f
Metrologia II
28
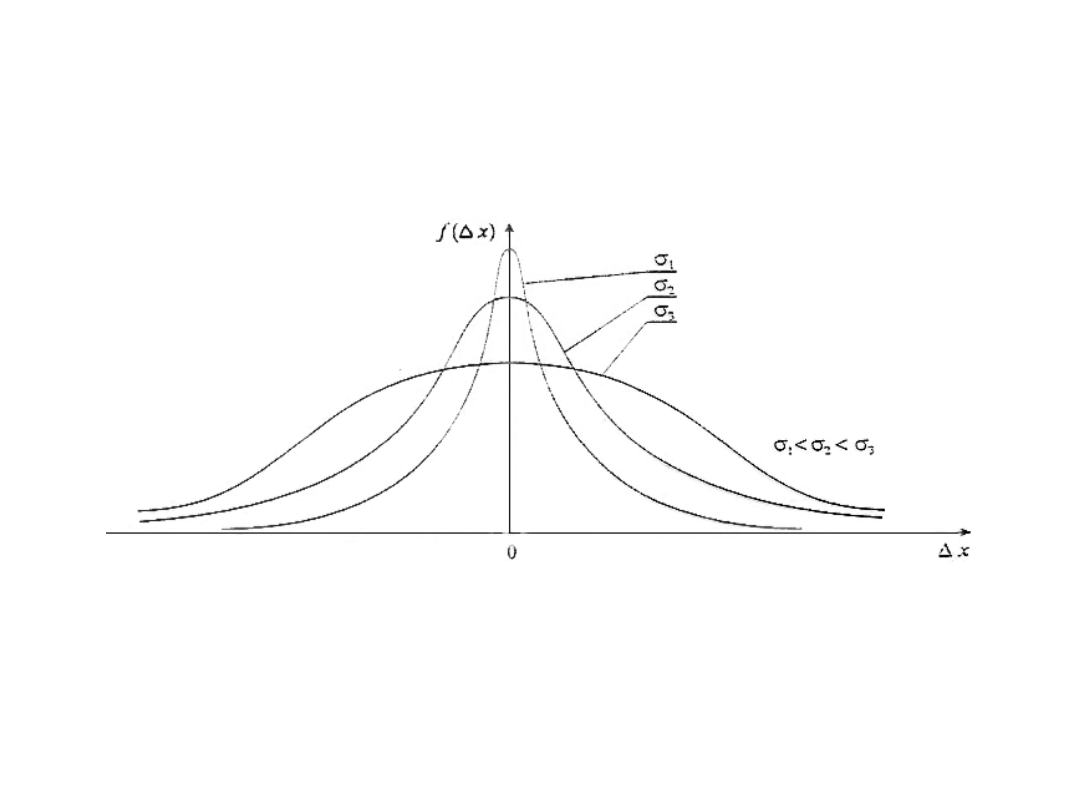
Parametrami rozkładu normalnego są: wartość oczekiwana μ, wariancja σ
2
i odchylenie
standardowe σ. Wykresem gęstości prawdopodobieństwa jest krzywa dzwonowa.
Własności rozkładu normalnego:
1. funkcja jest symetryczna względem wartości oczekiwanej μ,
2. w punkcie x = μ funkcja osiąga maksimum,
3. wartość funkcji w punkcie x = μ zależy od wartości σ (im większe σ tym mniejsze μ),
4. funkcja przyjmuje tylko wartości dodatnie
5. powierzchnia zawarta między krzywą jest równa jedności
1
dx
x
f
Estymatorem wartości oczekiwanej μ z rozkładu ciągłej zmiennej losowej w rozkładzie
dyskretnej
zmiennej losowej jest średnia arytmetyczna , która jest przybliżeniem wartości
rzeczywistej mierzonej
wielkości
_
x
n
i
i
x
n
x
1
_
1
n – liczba pomiarów
x
i
– i-ty wynik pomiaru
Metrologia II
29
Metrologia II
30
Estymatorem odchylenia standardowego σ jest odchylenie średnie kwadratowe s, które jest
miarą rozrzutu wyników pomiaru wokół wartości średniej, a więc miarą błędów pomiaru.
1
1
2
n
x
x
s
n
i
i
_
Ponieważ wartość średnia jest również zmienną losową z kilku serii pomiarów, więc można
mówić o średnim odchyleniu kwadratowym średniej s
s
n
s
s
s
Przy pomiarach z uwzględnieniem błędów przypadkowych jako wartość zmierzoną podaje się
wartość średnią:
Natomiast błąd graniczny określa zależność:
_
x
x
z
s
gr
s
e
x
e jest współczynnikiem rozkładu zmiennej losowej, a jego wartość zależy od przyjętego
prawdopodobieństwa P zwanego poziomem ufności znalezienia się wartości rzeczywistej w
przedziale
zwanym przedziałem ufności.
)
,
(
_
_
s
s
es
x
es
x
Metrologia II
31
Przy wyznaczaniu błędów przypadkowych wyróżniamy dwa przypadki
n > 30
Wówczas przedział ufności wyznacza się z rozkładu normalnego przyjmując wystarczający dla
potrzeb pomiarów warunek e = 3, tzn.
s
gr
s
x
3
Przyjęcie e = 3 oznacza, że przedział ufności zawiera wartość rzeczywistą mierzonej
wielkości z prawdopodobieństwem P, czyli na poziomie ufności 99,73%. dla e = 1, P =
68,23%
n < 30
W tym przypadku korzystamy z rozkładu t – Studenta, który jest przybliżeniem rozkładu
normalnego. Współczynnik e w rozkładzie studenta oznaczony jest przez t, e = t.
Współczynnik t wyznacza się z rozkładu Studenta znając liczbę stopni swobody k = n – 1
oraz poziom ufności P.
Metrologia II
32
Wartości krytyczne t
kα
rozkładu t Studenta
0,5
0,4
0,317
4
0,3
0,2
0,1
0,05
0,02
0,01
0,005
0,002
0,001
1
1,0000
1,3764
1,836
7
1,9626
3,077
7
6,313
8
12,706
2
31,820
5
63,6567
127,3213
318,308
8
636,61
92
2
0,8165
1,0607
1,321
0
1,3862
1,885
6
2,920
0
4,3027
6,9646
9,9248
14,0890
22,3271
31,599
1
3
0,7649
0,9785
1,196
6
1,2498
1,637
7
2,353
4
3,1182
4
4,5407
5,8409
7,4553
10,2145
12,924
0
4
0,7407
0,9410
1,141
4
1,1896
1,533
2
2,131
8
2,7764
3,7469
4,6041
5,5976
5,5976
8,6103
5
0,7267
0,9195
1,110
3
1,1558
1,475
9
2,015
0
2,5706
3,3649
4,0321
4,7773
5,8934
6,8688
6
0,7176
0,9057
1,090
3
1,1342
1,439
8
1,943
2
2,4469
3,1427
3,7074
4,3168
5,2076
5,9588
7
0,7111
0,8960
1,076
5
1,1192
1,414
9
1,894
6
2,3646
2,9980
3,4995
4,0293
4,7853
5,4079
8
0,7064
0,8889
1,066
3
1,1081
1,396
8
1,859
5
2,3060
2,8965
3,3554
3,8325
4,5008
5,0413
9
0,7027
0,8834
1,058
5
1,0997
1,383
0
1,833
1
2,2622
2,8214
3,2498
3,6897
4,2968
4,7809
10
0,6968
0,8791
1,052
4
1,0931
1,372
2
1,812
5
2,2281
2,7638
3,1693
3,5814
4,1437
4,5869
11
0,6974
0,8755
1,047
4
1,0877
1,363
4
1,795
9
2,2010
2,7181
3,1058
3,4966
4,0247
4,4370
12
0,6955
0,8726
1,043
2
1,0832
1,356
2
1,783
2
2,1788
2,6810
3,0545
3,4284
3,9296
4,3178
13
0,6938
0,8702
1,039
8
1,0795
1,350
2
1,770
9
2,1604
2,6503
3,0123
3,3725
3,8520
4,2208
14
0,6924
0,8681
1,036
8
1,0763
1,345
0
1,761
3
2,1448
2,6245
2,9768
3,3257
3,7874
4,1405
15
0,6912
0,8662
1,034
3
1,0735
1,340
6
1,753
1
2,1314
2,6025
2,9467
3,2860
3,7328
4,0728
16
0,6901
0,8647
1,032
0
1,0711
1,336
8
1,745
9
2,1199
2,5835
2,9208
3,2520
3,6862
4,0150
17
0,6892
0,8633
1,030
1
1,0690
1,333
4
1,739
6
2,1098
2,5669
2,8982
3,2224
3,6458
3,9651
18
0,6884
0,8620
1,028
4
1,0672
1,330
4
1,734
1
2,1009
2,5524
2,8784
3,966
3,6105
3,9216
k
α
P – poziom ufności; = (1-P ) – poziom istotności; k = (n-1) – liczba
stopni swobody
Metrologia II
33
19
0,6876
0,8610
1,026
8
1,0655
1,327
7
1,729
1
2,093
0
2,5395
2,8609
3,1737
3,5794
3,8834
20
0,6870
0,8600
1,025
4
1,0640
1,325
3
1,724
7
2,086
0
2,5280
2,8453
3,1534
3,5518
3,8495
21
0,6864
0,8591
1,024
2
1,0627
1,323
2
1,720
7
2,079
6
2,5176
2,8314
3,1352
3,5272
3,8193
22
0,6858
0,8583
1,023
1
1,0614
1,321
2
1,717
1
2,073
9
2,5083
2,8188
3,1188
3,5050
37621,
23
0,6853
0,8575
1,022
0
1,0603
1,319
5
1,713
9
2,068
7
2,4999
2,8073
3,1040
3,4850
3,7676
24
0,6848
0,8569
1,021
1
1,0593
1,317
8
1,710
9
2,063
9
2,4922
2,7969
3,0905
3,4668
3,7454
25
0,6844
0,8562
1,020
2
1,0584
1,316
3
1,708
1
2,059
5
2,4851
2,7874
3,0782
3,4502
3,7251
26
0,6840
0,8557
1,019
4
1,0575
1,315
0
1,705
6
2,055
5
2,4786
2,7787
3,0669
3,4350
3,7066
27
0,6837
0,8551
1,018
7
1,0567
1,313
7
1,703
3
2,051
8
2,4727
2,7701
3,0565
3,4210
3,6896
28
0,6834
0,8546
1,018
0
1,0560
1,312
5
1,701
1
2,048
4
2,4671
2,7633
3,0469
3,04082
3,6739
29
0,6830
0,8542
1,017
3
1,0553
1,311
4
1,699
1
2,045
2
2,4620
2,7564
3,0380
3,3962
3,6594
30
0,6828
0,8538
1,016
8
1,0547
1,310
4
1,697
3
2,042
3
2,4573
2,7500
3,0298
3,3852
3,6460
40
0,6807
0,8507
1,012
5
1,0500
1,303
1
1,683
9
2,021
1
2,4233
2,7045
2,9712
3,3069
3,5510
50
0,6794
0,8489
1,009
9
1,0473
1,298
7
1,675
9
2,008
6
2,4033
2,6778
2,9370
3,2614
3,4960
100
0,6770
0,8452
1,004
8
1,0418
1,290
1
1,660
2
1,984
0
2,3642
2,6259
2,8707
3,1737
3,3905
100
0
0,6747
0,8420
1,003
1,0370
1,282
4
1,646
4
1,962
3
2,3301
2,5808
2,8133
3,0984
3,3003
∞
0,6745
0,8418
1,000
1,0364
1,281
6
1,644
9
1,960
0
2,3263
2,576
2,8070
3,0902
3,2905
Rozkład t Studenta c.d.
Metrologia II
34
Przykład
l
1
= 783,9 mm; l
2
= 784,3 mm; l
3
= 785,2 mm; l
4
= 784,8 mm; l
5
= 784,3 mm; l
6
= 785,2 mm, podać wynik
pomiaru.
Wartość średnia:
mm
24
0
5
6
6
0
5
0
2
0
6
0
3
0
7
0
s
mm
6
784
2
785
1
784
8
748
2
785
3
784
9
783
6
1
1
2
2
2
2
2
2
s
6
1
,
,
,
,
,
,
,
,
,
,
,
,
,
,
l
l
n
l
i
k = n – 1= 5; P = 0.95;
= 0.05 z tablic rozkładu Studenta t = 2,6
Wynik pomiaru: 784,6 mm ± 0,62 mm
Metrologia II
35
Omyłki, błędy nadmierne
Przyczyny: nieprawidłowy odczyt lub zapis, nieumiejętne zastosowanie przyrządu lub metody
pomiaru, zły stan psychiczny pomiarowca.
Błędy nadmierne powodują jawne zniekształcenie wyników pomiaru, występują rzadko w
procesie pomiarowym, są zauważalne na etapie opracowania wyników. Po obliczeniowym
oszacowaniu wartości tych błędów i uznaniu ich jako omyłki nie należy ich uwzględniać przy
opracowywaniu wyników pomiarów.
Metrologia II
36
1. Kryterium trzech sigm (3σ). Dla ocenianej próby wyznacza się wartości:
błędu
pomiaru wątpliwego wyniku x
p
i odchylenia średniego kwadratowego s próby. jeżeli
spełniona jest
nierówność: wątpliwy wynik pomiaru x
p
należy odrzucić, przyjmując, że z
prawdopodobieństwem 99,73% jest on omyłką.
2.Kryterium Chauventa. Jest ono opracowane przy założeniu, że prawdopodobieństwo
zgrupowania
odchyłek wyników n pomiarów wokół ich wartości średniej nie powinno być mniejsze niż .
Warunek
ten jest przedstawiony w tablicy określającej wartość względną dopuszczalnego błędu
pomiary
w zależności od liczby pomiarów n. Przy spełnionym, dal danej liczności prób n,
warunku:
wyniku pomiaru x
p
nie naleźmy uwzględniać.
_
x
x
x
p
p
s
x
p
3
s
x
max
tab
p
p
s
x
s
x
x
s
x
max
_
Sposoby szacowania omyłek
n
2
1
Metrologia II
37
PRZYGOTOWANIE EKSPERYMENTU POMIAROWEGO
Celem pomiarów jest uzyskanie wyników obarczonych możliwie jak najmniejszymi
błędami, przy spełnieniu istotnego warunku minimalizacji czasu i kosztów wykonania
pomiarów.
- Eksperyment pomiarowy należy rozpocząć od wykonania nielicznej serii próbnych
pomiarów
wielkości X.
- Ze zbiorów otrzymanych wyników wybrać wartości: . na podstawie
znajomości
klasy dokładności używanych przyrządów pomiarowych wyznaczyć
największą wartość błędu granicznego .
- Rozważyć relację
W przypadku 1 o dokładności pomiarów decydują błędy systematyczne i jej zwiększenie
wymaga zastosowania dokładniejszych przyrządów lub metod. Przy braku możliwości
zmiany oprzyrządowania pomiarowego wyniki pomiarów wstępnych należy uznać za
ostateczne.
W przypadku 2 o dokładności pomiarów decydują błędy przypadkowe. Zwiększenie
dokładności wymaga zwiększenia liczności próby. Niezbędną liczbę n pomiarów dla
uzyskania błędów w określonym przedziale ufności można wyznaczyć wykorzystując
tablice rozkładu zmiennej losowej t Studenta.
min
max
,x
x
max
x
max
min
max
x
x
x
max
min
max
x
x
x
1.
2.
Metrologia II
38
KORELACJA
y
x
xy
S
S
S
r
n
i
i
x
x
x
n
S
1
2
1
_
n
i
i
y
y
y
n
S
1
2
_
1
;
S
x
, S
y
- średnie odchylenia standardowe
n
i
n
i
i
i
n
i
n
i
i
i
n
i
n
i
n
i
i
i
i
i
y
y
n
x
x
n
y
x
y
x
n
r
1
2
1
2
1
2
1
2
1
1
1
a
kowariancj
-
1
1
y
y
x
x
n
S
i
n
i
i
xv
- współczynnik
korelacji
1 r
-1
Metrologia II
39
0,1
0,05
0,02
0,01
0,001
1
0,988
0,997
1
1
1
2
0,900
0,950
0,980
0,990
1
3
0,805
0,878
0,934
0,959
0,991
4
0,729
0,811
0,882
0,917
0,974
5
0,669
0754
0,833
0,874
0,951
6
0,622
0,707
0,789
0,834
0,925
7
0,582
0,666
0,750
0,780
0,898
8
0,540
0,632
0,716
0,765
0,872
9
0, 521
0,602
0,685
0,735
0,847
10
0,497
0,576
0,658
0,708
0,823
12
0, 458
0,532
0,612
0,661
0,780
14
0, 426
0,497
0,574
0,623
0,742
16
0,400
0,468
0,542
0,590
0,708
18
0,378
0,444
0,516
0,561
0,679
20
0, 360
0,423
0,492
0,537
0,652
25
0, 275
0,381
0,445
0,487
0,597
30
0, 296
0,349
0,409
0,449
0,554
35
0, 275
0,325
0,381
0,418
0,519
40
0, 257
0,304
0,358
0,393
0,490
45
0, 243
0,288
0,338
0,372
0,463
Wartości krytyczne współczynnika korelacji r
kr
k
Metrologia II
40
Przykład.
Na poziomie istotności α = 0,01 sprawdzić, czy pomiędzy I oraz U istnieje korelacja liniowa.
Lp
I [mA]
U [V]
1
2,23
0,342
0,763
4,9729
0,1170
2
2,45
0,333
0,816
6,0025
0,1109
3
5,09
0,332
1,6639
25,9081
0,1037
4
5,99
0,312
1,869
35,8801
0,0973
5
5,78
0,300
1,734
33,4084
0,0900
6
6,48
0,290
1,879
41,9904
0,0841
7
7,98
0,276
2,202
63,6804
0,0762
8
8,44
0,262
2,211
71,2336
0,0610
9
9,45
0,247
2,334
89,3025
0,0610
10
11,04
0,228
2,517
121,8816
0,0520
Suma
64,93
2,912
17,9646
494,2605
0,8608
i
x
i
y
i
y
x
1
2
i
x
2
i
y
977
0
912
2
8608
0
10
93
64
2605
494
10
912
2
93
64
9646
17
10
2
2
,
,
,
,
,
,
,
,
r
Z tablic rozkładu Studenta dla α = 0,01 i liczby stopni swobody k
r
= n – 2 znajdujemy r
kr
=
0,765; . Oznacza to, że z prawdopodobieństwem P = 99,99 można przyjąć istnienie
korelacji liniowej między wartościami napięcia i prądu.
r
r
kr
Metrologia II
41
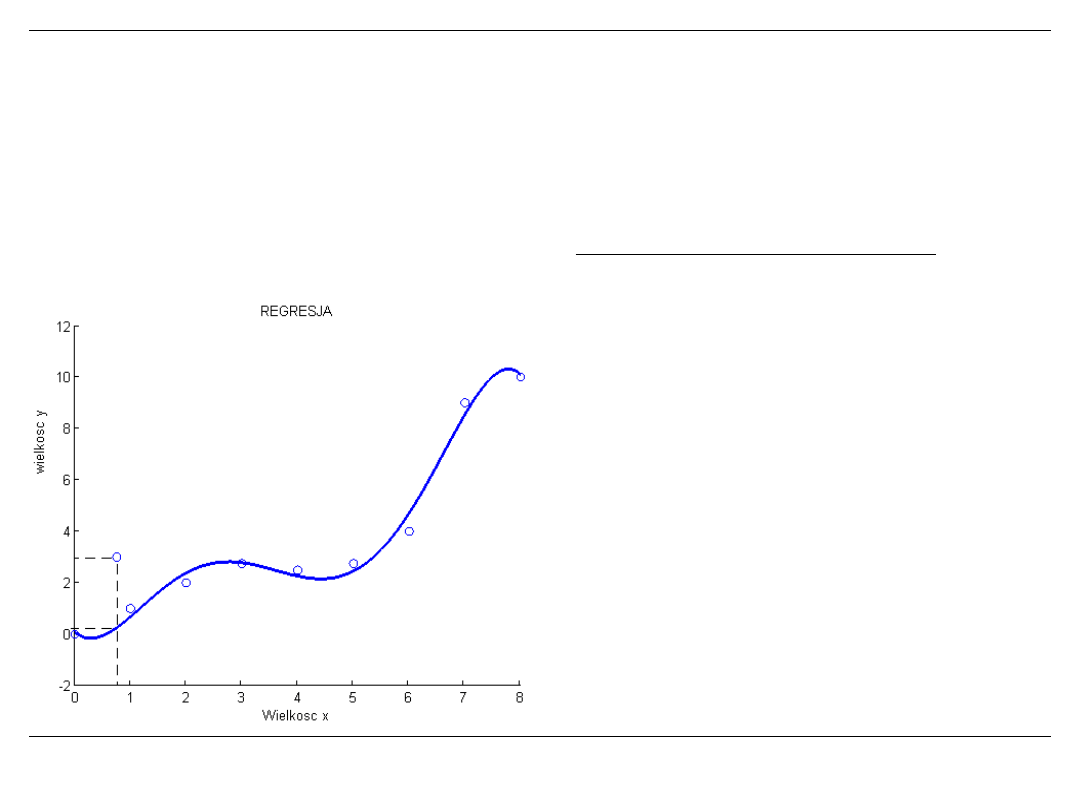
REGRESJA
Równanie regresji liniowej dla par wyników (x
i
, y
i
)
i
i
x
b
a
y
a, b – współczynniki regresji liniowej, wyznaczane metodą najmniejszych kwadratów, w której
zakłada się: suma kwadratów różnic wartości pomiarowych i obliczeniowych w równaniu
regresji jest najmniejsza.
Równanie regresji przyjęte do opisu
zależności
m
m
x
A
x
A
x
A
A
x
f
.....
2
2
1
0
m
i
m
i
i
i
i
i
i
x
A
x
A
x
A
A
y
x
f
y
y
.......
2
2
1
0
x
f(x)
f(x
i
)
y
i
∆y
i
Metrologia II
42
Zgodnie z warunkiem wynikającym MNK
2
1
n
i
i
y
E
Funkcja E osiągnie minimum gdy pierwsze jej pochodne względem nieznanych
współczynników A
0
÷A
m
będą się zerowały.
0
......
2
1
2
2
1
0
0
n
i
m
i
m
i
i
i
x
A
x
A
x
A
A
y
A
E
0
2
1
2
2
1
0
1
i
n
i
m
i
m
i
i
i
x
x
A
x
A
x
A
A
y
A
E
......
0
......
2
2
1
2
2
1
0
2
i
n
i
m
i
m
i
i
i
x
x
A
x
A
x
A
A
y
A
E
0
......
2
1
2
2
1
0
m
i
n
i
m
i
m
i
i
i
m
x
x
A
x
A
x
A
A
y
A
E
……..
= minimum
2
2
2
1
0
1
m
i
m
i
i
i
n
i
x
A
x
A
x
A
A
y
......
Metrologia II
43
W przypadku założenia liniowej zależności między zmiennymi x i y równanie regresji:
x
A
A
y
i
1
0
wówczas będzie:
0
2
1
1
0
0
n
i
i
i
x
A
A
y
A
E
0
2
1
1
0
1
i
n
i
i
i
x
x
A
A
y
A
E
Po przekształceniu otrzymuje się wyrażenia dla wyznaczenia wartości współczynników:
n
i
n
i
i
i
n
i
i
n
i
n
i
i
i
i
x
x
n
y
x
y
x
n
A
1
2
1
2
1
1
1
1
n
i
n
i
i
i
n
i
i
i
n
i
n
i
i
n
i
i
i
x
x
n
y
x
x
y
x
A
1
2
1
2
1
1
1
1
2
0
Metrologia II
44
Przykład.
Obliczyć współczynniki regresji liniowej przy założeniu, że zależność między napięciem U i
prądem I z
poprzedniego zadania ma postać:
I
A
A
U
1
0
013
,
0
93
,
64
2605
,
494
10
912
,
2
93
,
64
6946
,
17
10
2
1
A
376
,
0
0
A
Metrologia II
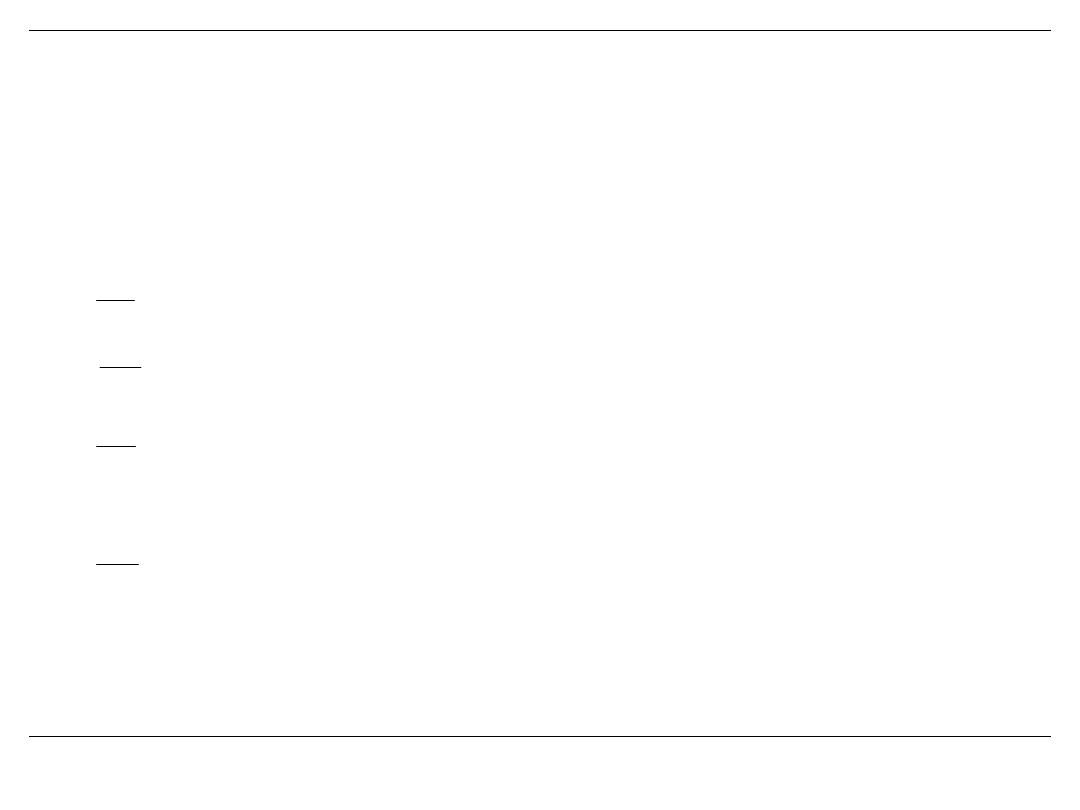
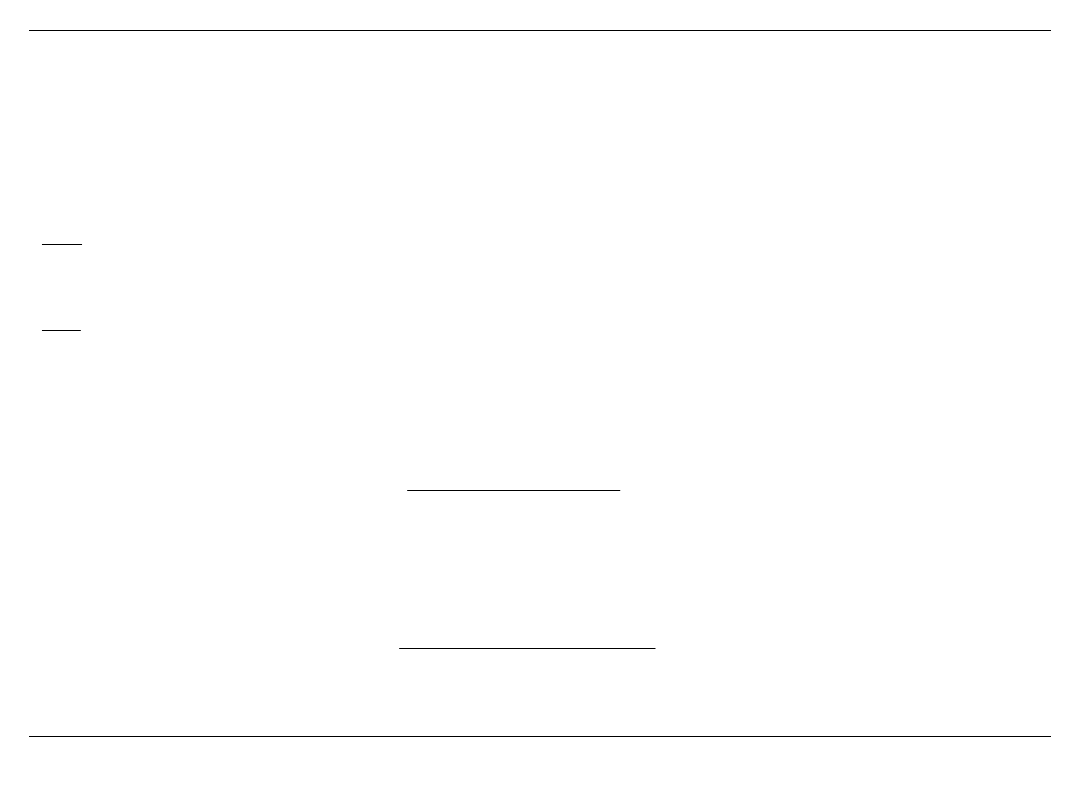
45
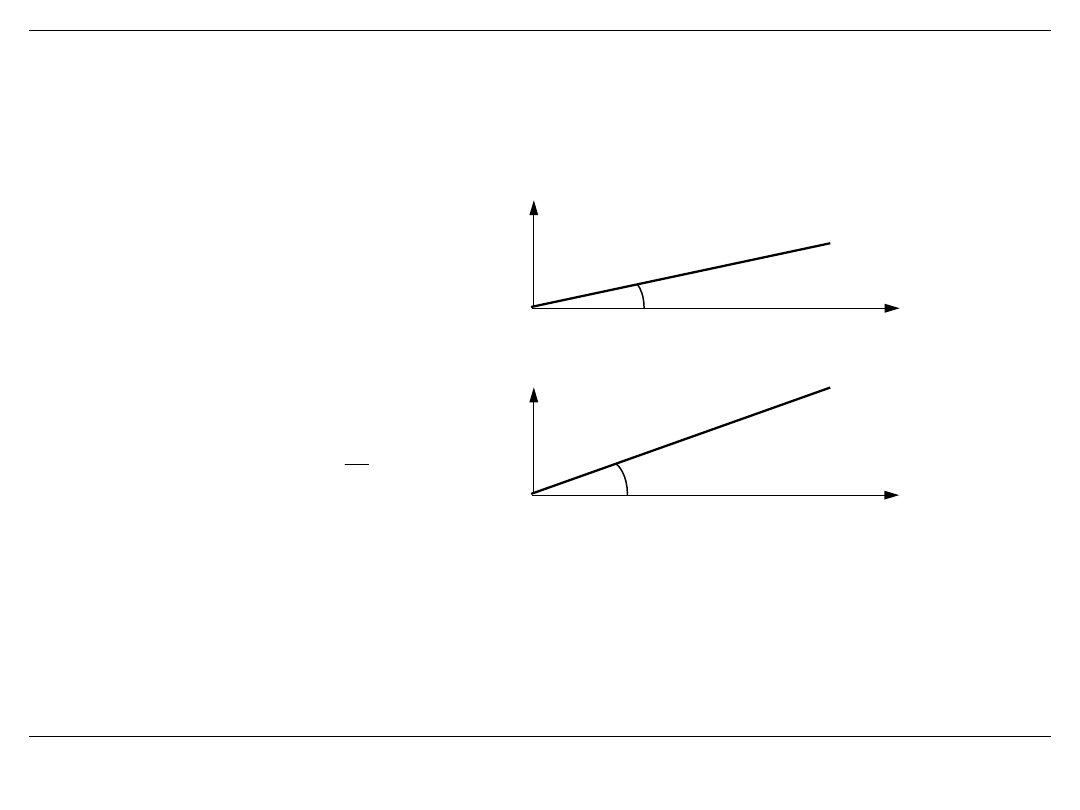
WŁASNOŚCI STATYCZNE PRZETWORNIKÓW POMIAROWYCH
Charakterystyka
statyczna
x
y
y = f(x) – funkcja przetwarzania, wykres funkcji przetwarzania nazywa się charakterystyką statyczną.
A
B
x
min
x
max
y
max
y
min
y
x
Metrologia II
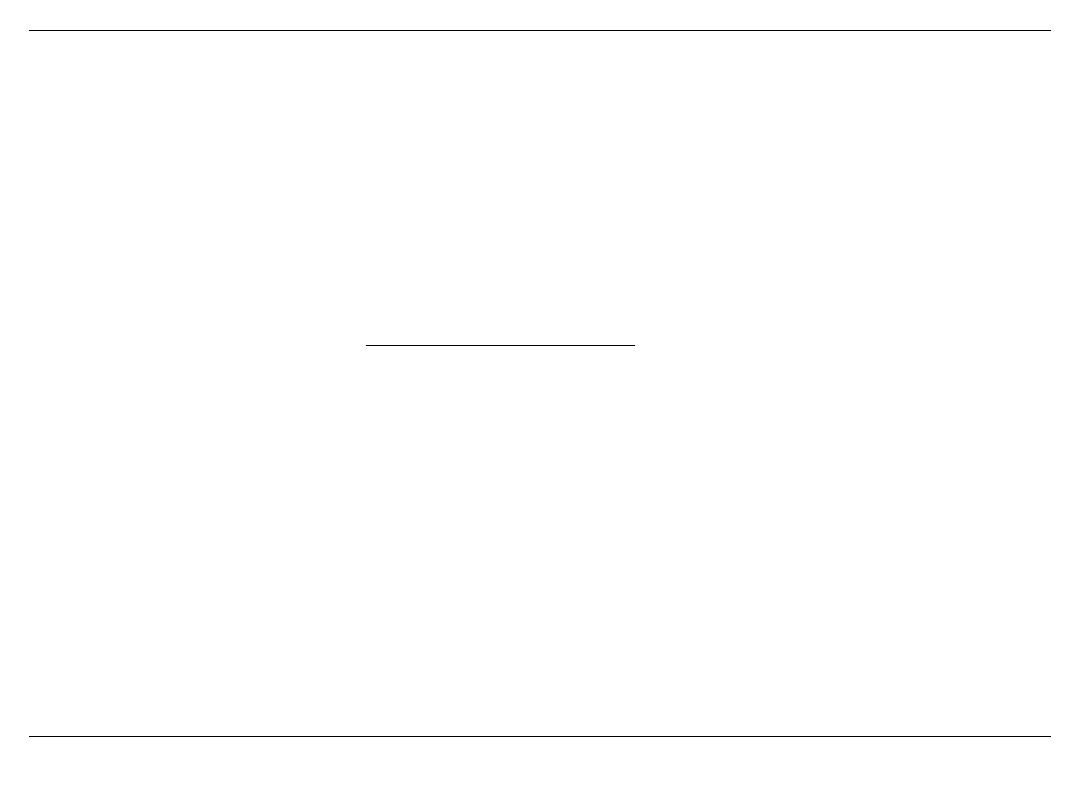
46
Charakterystyka statyczna liniowego przetwornika jest lina prostą, funkcja przetwarzania:
min
min
max
min
max
min
x
x
x
x
y
y
y
y
Podstawiając w równaniu (1): - czułość przetwornika
otrzymuje się:
min
max
min
max
x
x
y
y
S
min
min
x
x
S
y
y
min
min
x
S
x
S
y
y
min
min
x
S
y
x
S
y
Ostatnią zależność można zapisać w postaci zależności:
)
(x
y
y
x
S
y
l
o
min
min
x
S
y
y
o
Metrologia II
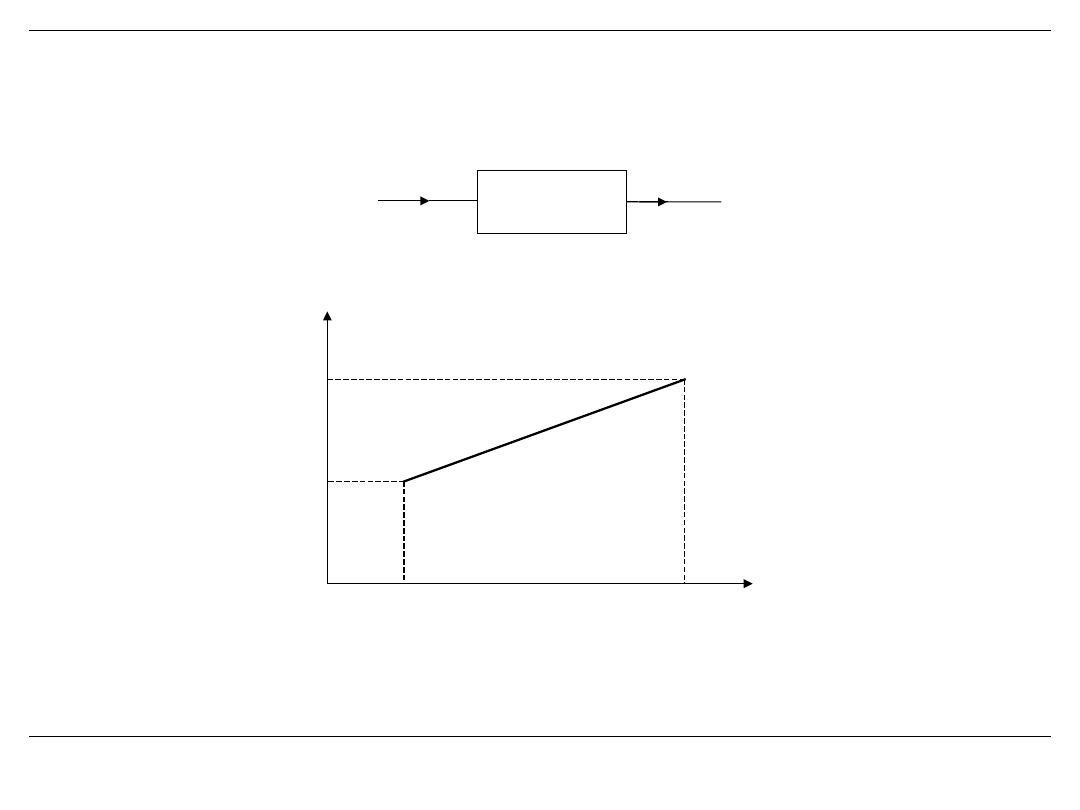
47
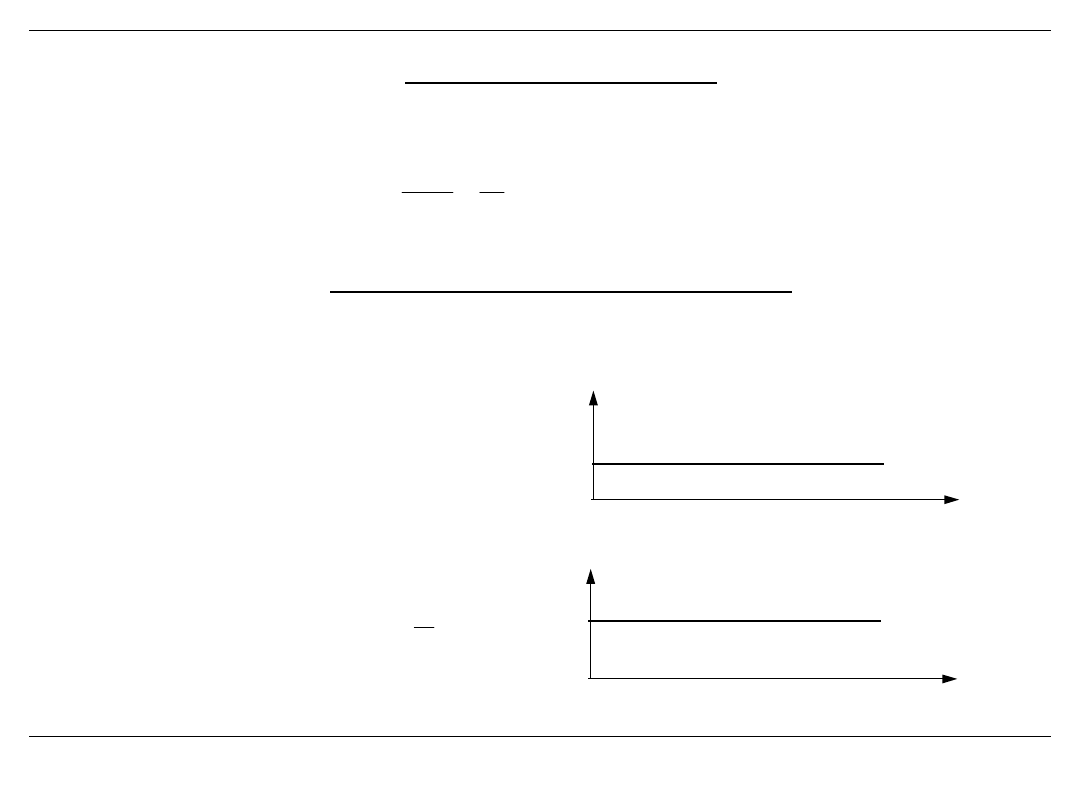
Sygnał wejściowy x (0÷10
4
Pa)
Sygnał wyjściowy y (4÷20 mA)
Funkcja przetwornika:
4
10
6
,
1
3
x
y
Termoelement
C
mV
04
0
C
100
C
250
mV
4
mV
10
,
S
;
Sygnał wejściowy x (100÷250 °C)
0
C
100
C
mV
04
0
mV
4
,
o
y
;
Sygnał wyjściowy y (4÷10 mV)
Funkcja przetwornika:
x
y
04
,
0
Pa
mA
10
6
1
Pa
10
mA
16
3
4
.
S
mA
4
0
Pa
mA
10
6
1
mA
4
3
0
,
y
Przetwornik ciśnienia
Metrologia II
48
Nieliniowość
)
(
)
(
)
(
)
(
)
(
o
l
n
y
x
S
x
y
x
y
x
y
x
y
)
(
)
(
x
y
y
x
S
x
y
n
o
y
y
max
y
min
=
y
0
x
max
x
1
x
max
x
y
l
(x
1
)
y(x
1
)
A(x
min
,y
min
)
B(x
max
,y
max
)
y
n
(x
1
)
y
l
(x)
y
(x)
Metrologia II
49
Uchyb nieliniowości
%
)
(
min
max
max
100
y
y
x
y
n
n
Funkcja przetwarzania nieliniowego przetwornika wyrażona jako wielomian:
m
m
x
a
x
a
x
a
a
x
y
.....
)
(
2
2
1
0
Funkcja przetwarzania termoelementu typu miedź – konstantan.
Sygnał wejściowy x – temperatura spoiny w [°C]. Sygnał wyjściowy y – napięcie w V.
Funkcja przetwarzania ma postać:
4
6
3
4
2
2
10
195
,
2
10
071
,
2
10
319
,
3
74
,
38
)
(
x
x
x
x
x
y
(1)
Metrologia II
50
Czułość S, stała C
dx
dy
S
S
C
1
3
6
2
4
2
10
780
,
8
10
213
,
6
10
638
,
6
74
,
38
)
(
x
x
x
dx
dy
x
S
S = const., C = const. dla przetwornika liniowego.
Znając wartość sygnału wyjściowego przetwornika liniowego można wyznaczyć wartość
sygnału wejściowego (mierzonego) z zależności:
W przetwornikach nieliniowych wartość czułości S zależy od wartości mierzonego sygnału x.
Dla termometru, którego funkcję przetwarzania opisuje (1) wartość czułości wyznacza
zależność:
.
S
y
x
Metrologia II
51
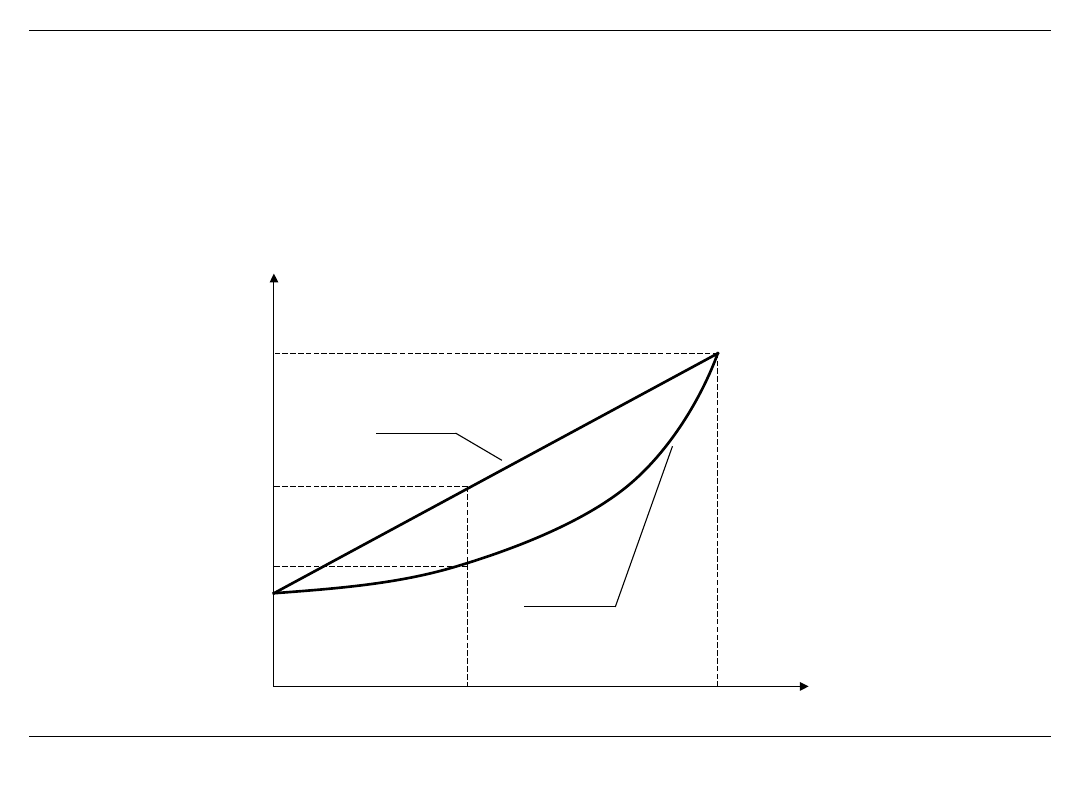
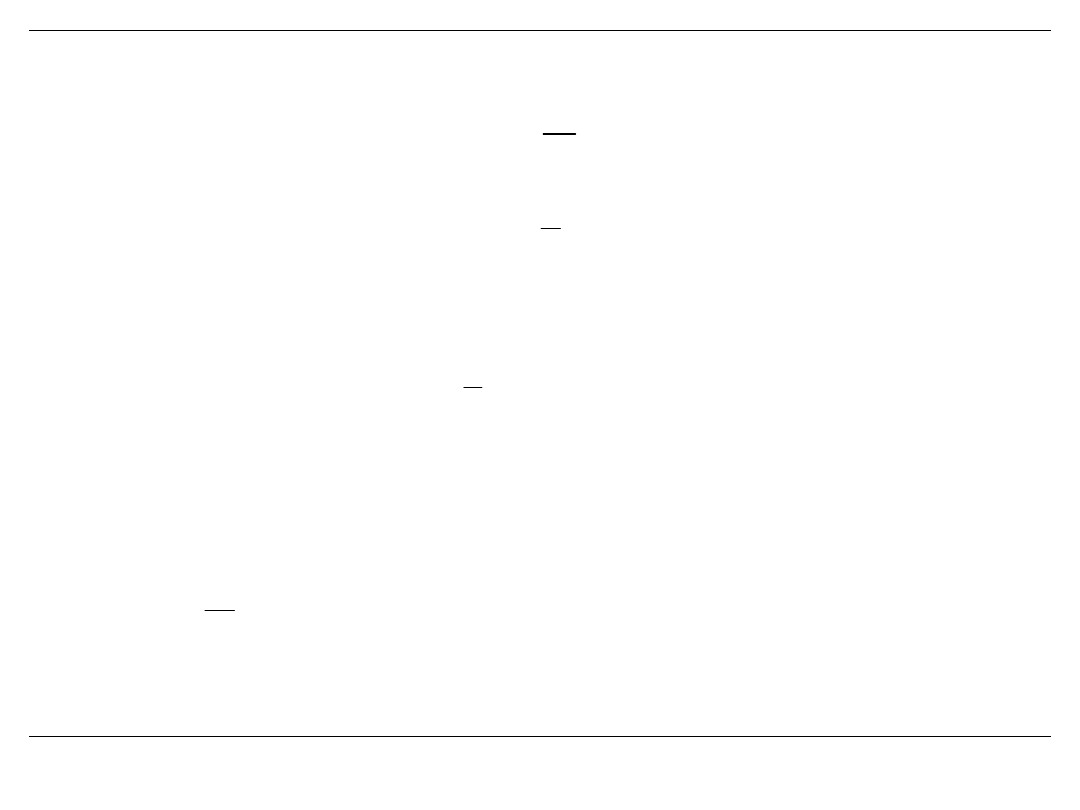
Niejednoznaczność
y
x
x
max
x
1
x
min
y
min
y
max
y(x
1
)
r
y(x
1
)
m
Uchyb histerezy
%
|
)
(
)
(
|
min
max
max
100
y
y
x
y
x
y
m
r
h
Metrologia II
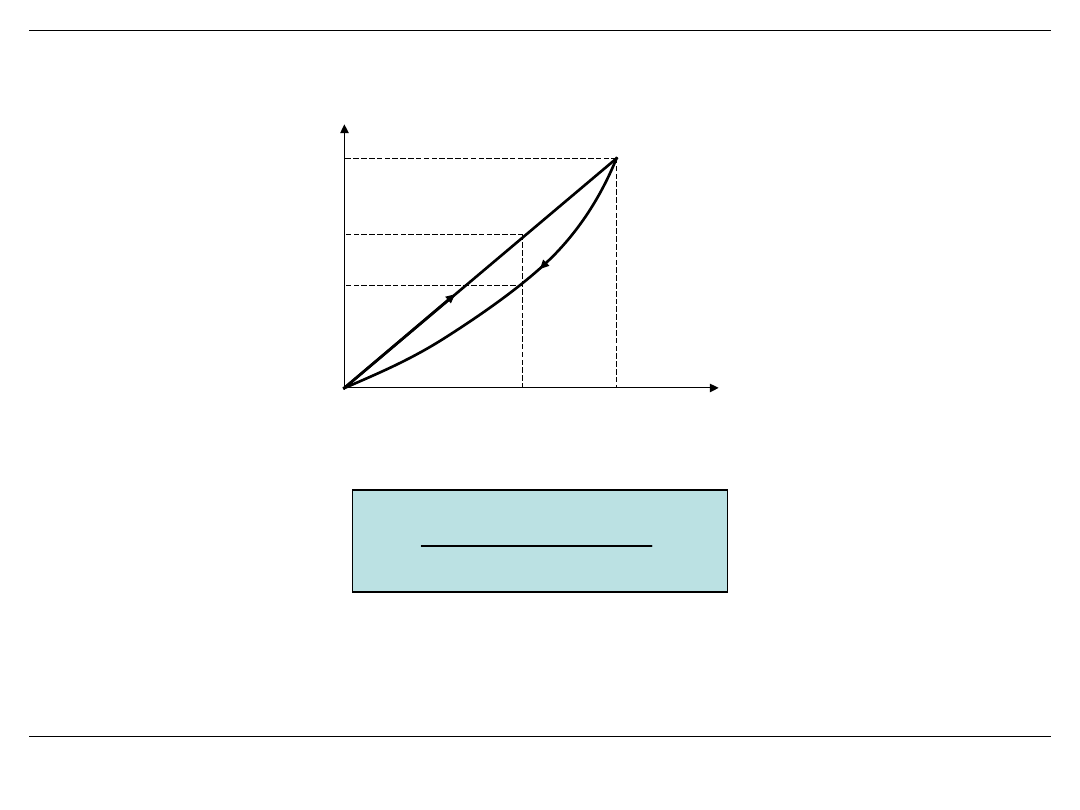
52
Rozdzielczość
y
x
x
max
x
min
y
min
y
max
Uchyb rozdzielczości
%
100
min
max
x
x
x
r
∆x
R
l
l ≡ x
R ≡ y
Metrologia II
53
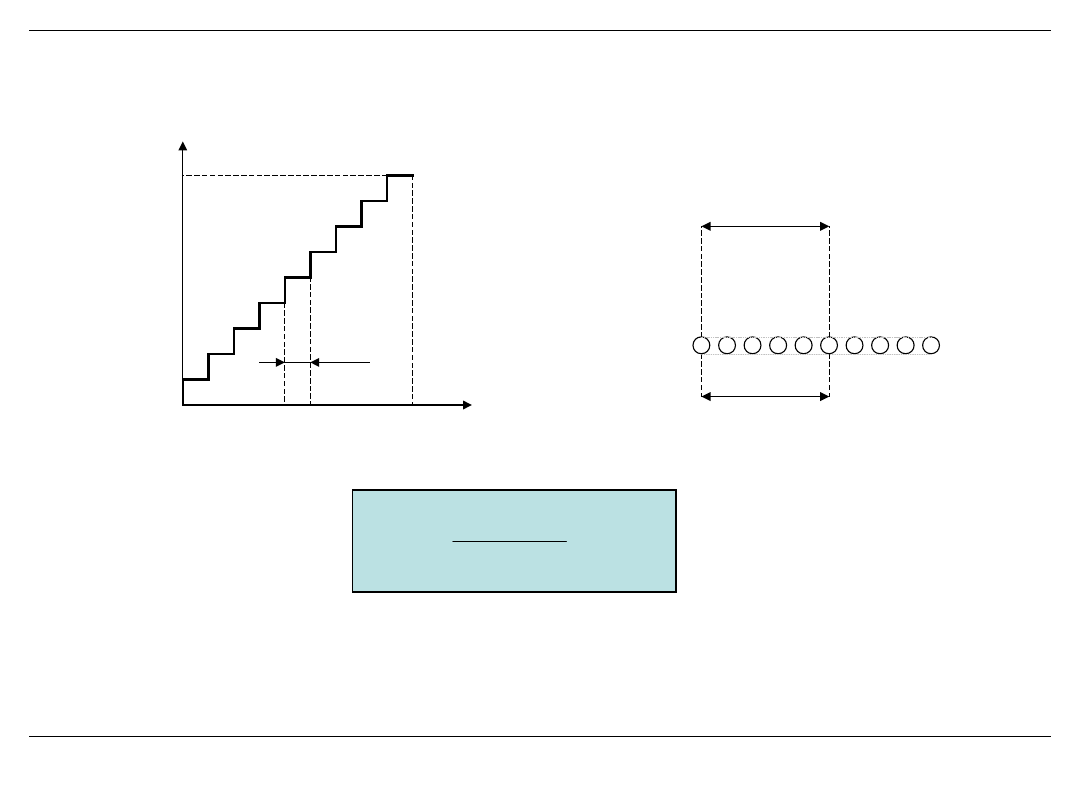
Klasa dokładności
y
x
max
x
min
y
min
y
max
∆y
ma
x
%
100
min
max
max
y
y
y
Klasa dokładności zawiera w sobie wszystkie wyszczególnione poprzednio uchyby. Znajomość
klasy
dokładności pozwala na wyznaczenie przedziału, w którym mieści się wartość sygnału
wyjściowego y, dla
każdej wartości sygnału wejściowego x.
max
)
(
)
(
y
x
y
x
y
l
max
max
)
(
)
(
)
(
y
x
y
x
y
y
x
y
l
l
x
Metrologia II
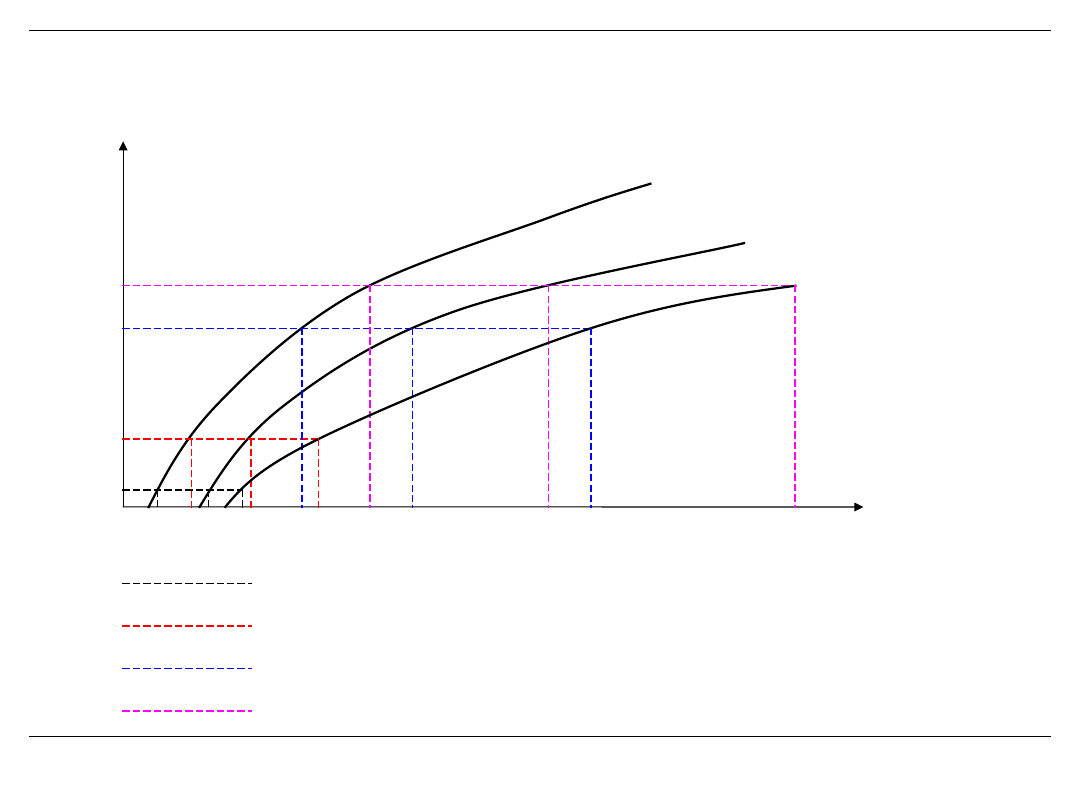
54
STRUKTURY TORÓW POMIAROWYCH
Szeregowa
x
y
1
y
2
y
);
(
1
1
x
f
y
);
(
1
2
2
y
f
y
)
(
2
3
y
f
y
Przetworniki liniowe:
;
1
1
x
S
y
;
1
2
2
y
S
y
2
3
y
S
y
;
x
S
S
S
y
3
2
1
;
3
2
1
S
S
S
S
w
dla n elementów
n
w
S
S
S
S
S
........
3
2
1
Graficzne wyznaczanie charakterystyki statycznej dla struktury szeregowej
y
y
2
x
y
1
(x)
y
2
(y
1
)
y
1
y(x)
1
2
3
}
{
1
2
3
x
f
f
f
y
y(y
2
)
Metrologia II
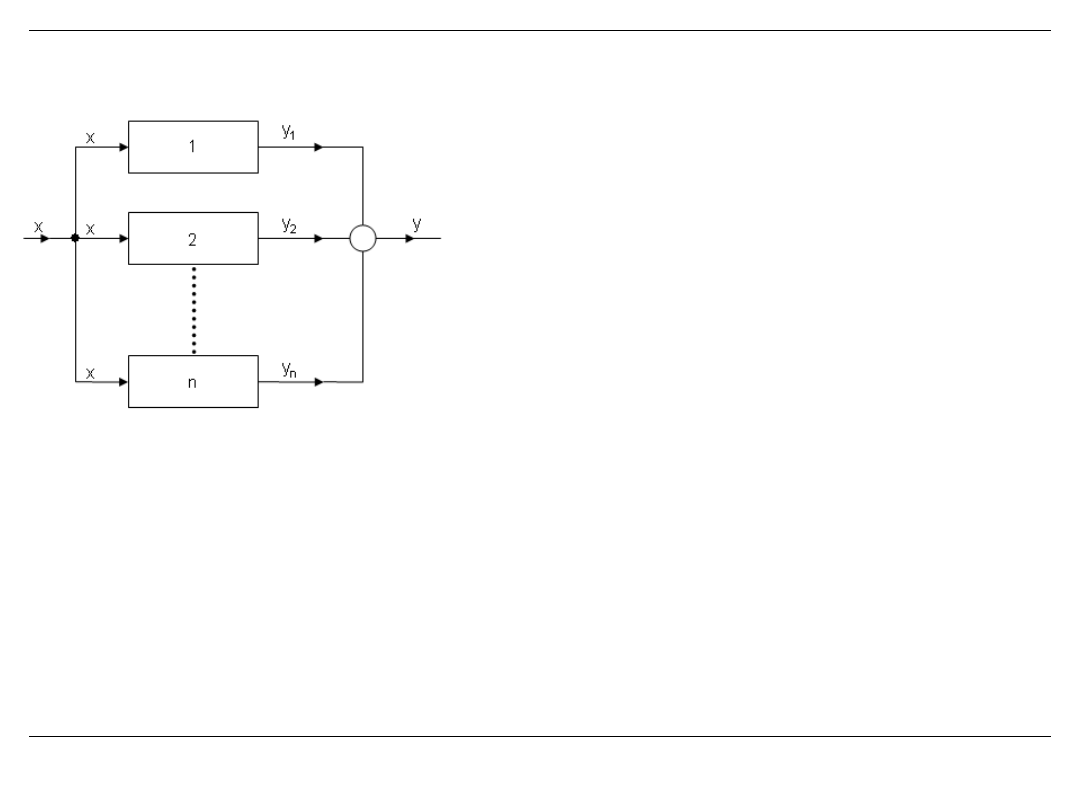
55
Równoległa
);
(
1
1
x
f
y
);........
(
2
2
x
f
y
)
(x
f
y
n
n
n
y
y
y
y
....
2
1
Przetworniki liniowe
;
1
1
x
S
y
;
2
2
x
S
y
x
S
y
n
n
;
.....
2
1
x
S
S
S
y
n
;
x
S
y
w
n
w
S
S
S
S
.....
2
1
Metrologia II
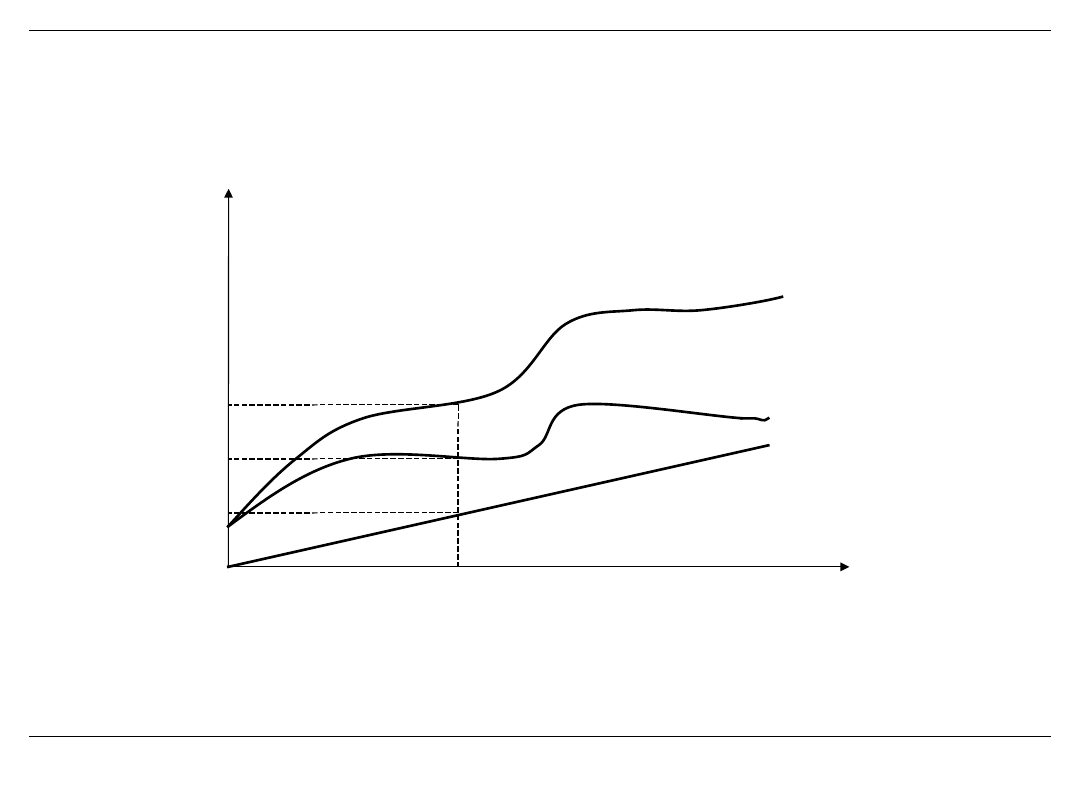
56
Graficzne wyznaczanie charakterystyki statycznej dla struktury równoległej
y(x
a
)=y
1
(x
a
)+y
2
(x
a
)
y (x)
y
2
(x)
y
1
(x)
x
y
y
2
(x
a
)
y
1
(x
a
)
x
a
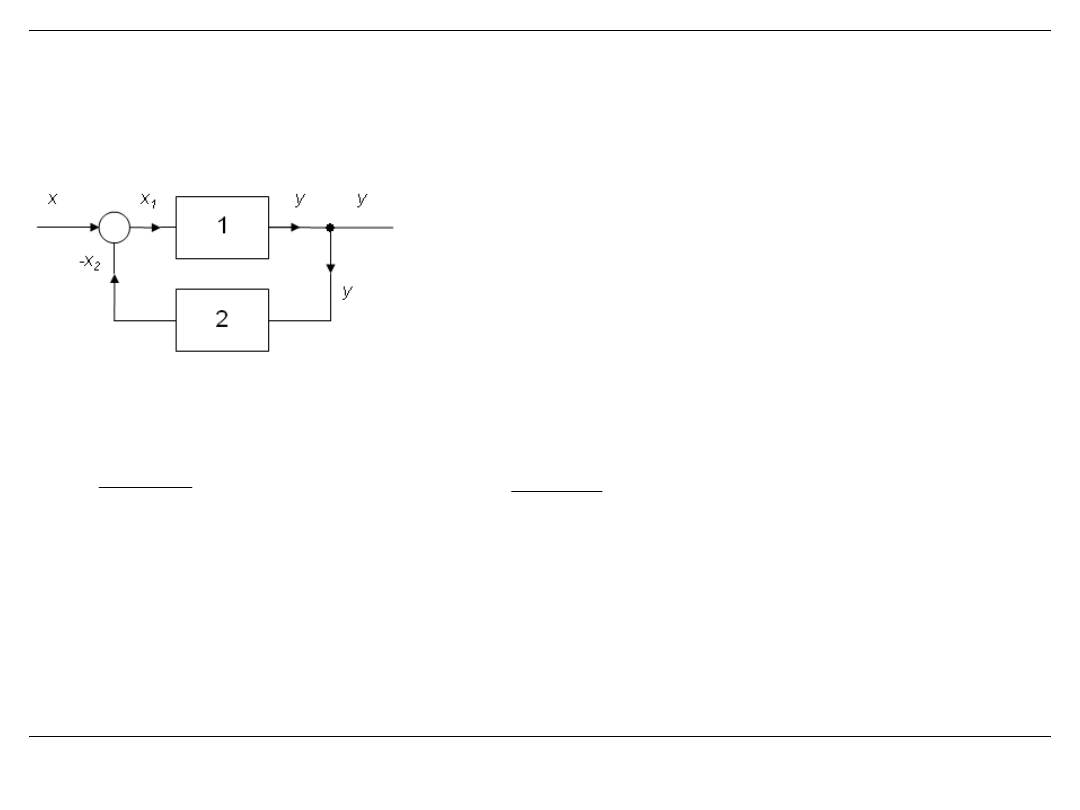
Metrologia II
57
Ze sprzężeniem zwrotnym
);
(
1
1
x
f
y
);
( y
f
x
2
2
2
1
x
x
x
)]
(
[
2
1
y
f
x
f
y
Przetworniki liniowe:
;
1
1
x
S
y
;
2
2
y
S
x
2
1
x
x
x
;
)
(
2
1
1
2
1
y
S
S
x
S
y
S
x
S
y
;
1
2
1
1
x
S
S
S
y
;
x
S
y
w
2
1
1
1
S
S
S
S
w
Znak „ - " w mianowniku dla dodatniego sprzężenia zwrotnego.
Metrologia II
58
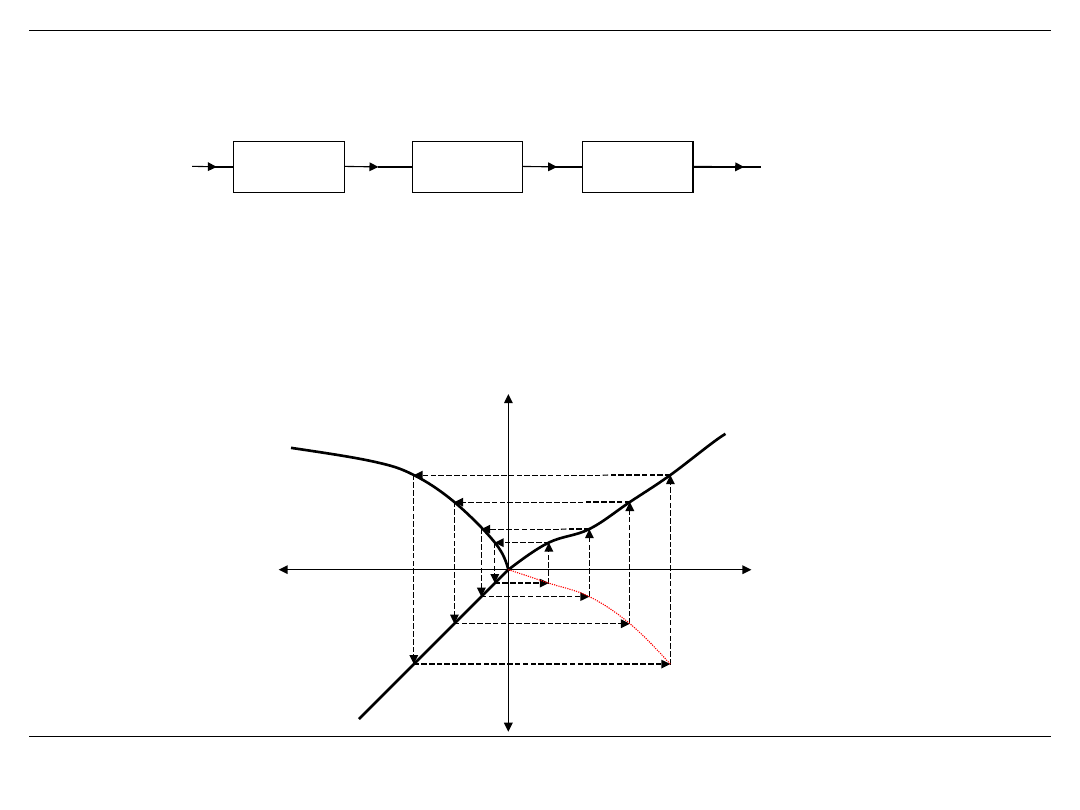
Graficzne wyznaczanie charakterystyki statycznej dla struktury ze sprzężeniem zwrotnym.
I
x
1
I
x
2
II
x
1
II
x
2
III
x
1
III
x
2
IV
x
1
IV
x
2
I
y
II
y
III
y
IV
y
y
x
1
1
x
f
y
y
f
x
1
2
x
y
II
II
II
x
x
x
2
1
I
I
I
x
x
x
2
1
III
III
III
x
x
x
2
1
IV
IV
IV
x
x
x
2
1
x= x
1
+ x
2
Metrologia II
59
Własności dynamiczne przetworników pomiarowych
Przykład: Termometr z bańką rtęciową.
m [kg]
— masa bańki z rtęcią
c
— ciepło właściwe bańki
— współczynnik wymiany ciepła między bańką a ośrodkiem, w którym mierzy
się temperaturę
θ
w
[K]
— temperatura własna bańki
θ [K]
— temperatura ośrodka
A [m
2]
— powierzchnia bańki z rtęcią, przez którą następuje wymiana ciepła podczas
pomiaru
W trakcie pomiaru ciepło
dQ
dostarczone do termometru w czasie
dt
jest równe ciepłu
akumulowanemu
w przetworniku.
dQ=α·A·(θ-θ
w
)·dt=m·c·dθ
w
θ
— sygnał wejściowy
θ
w
— sygnał wyjściowy
Dla dostatecznie długiego czasu
θ
wu
=θ
u
]
K
kg
J
[
]
K
m
W
[
2
w
w
dt
d
A
c
m
Metrologia II
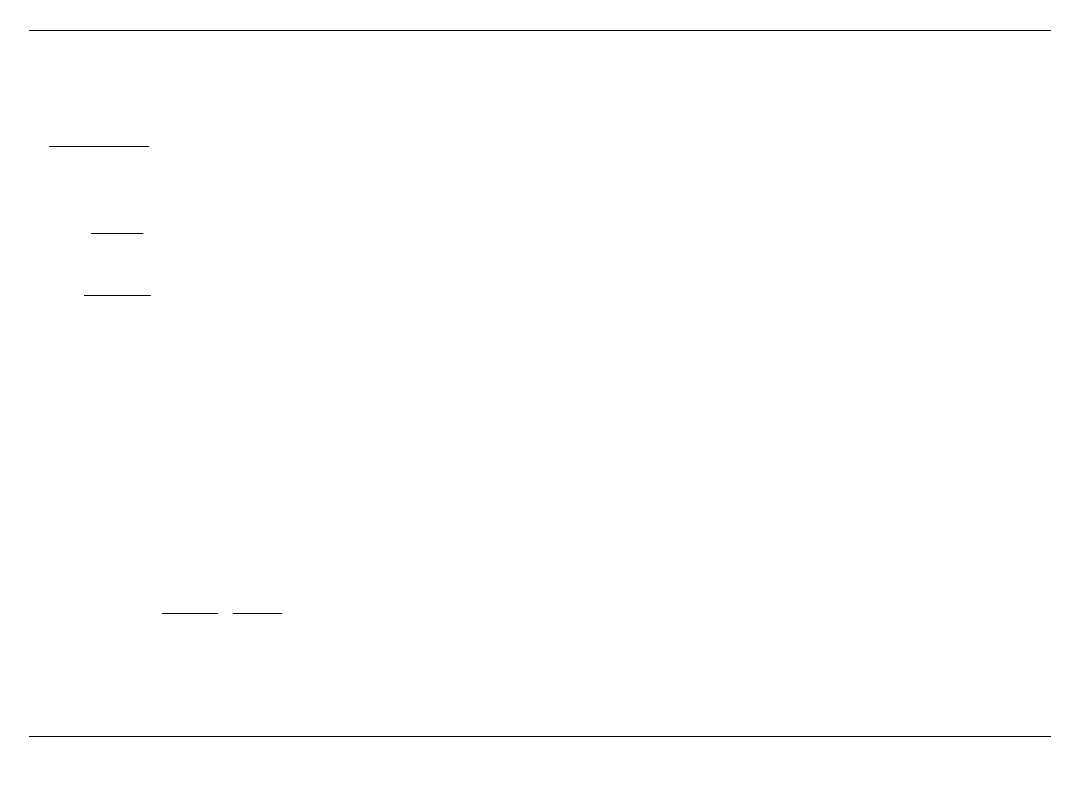
60
Przykład:
m [kg]
- masa
k
s
- stała sprężyny
B
- wsp. tłumienia
siła bezwładności
siła tłumienia
siła reakcji sprężyny
W stanie ustalonym
f
o
=k
s
·y
o
f
o
- wartość siły obciążającej
]
m
N
[
]
m
s
N
[
k
s
f(t)
B
y(t)
m
y
s
k
t
y
B
t
y
m
t
f
d
d
2
d
2
d
)
(
Metrologia II
61
Różniczkowe równanie opisujące człon liniowy n-tego rzędu
jednowymiarowy.
m
m
m
n
n
n
dt
x
d
b
dt
x
d
b
dt
dx
b
x
b
dt
y
d
a
dt
y
d
a
dt
dy
a
y
a
.......
......
2
2
2
1
0
2
2
2
1
0
n
k
m
i
i
i
i
k
k
k
dt
x
d
b
dt
y
d
a
0
0
x(t)
y(t)
Metrologia II
62
Przekształcenie Laplace’a
f(t)
– oryginał, funkcja czasu
F(s)
– transformata Laplace’a, funkcja argumentu
s
s=σ+jω
- zapis umowny
Przykłady obliczenia transformat
Funkcja jednostkowa:
Funkcja wykładnicza rosnąca:
0
)
(
)
(
dt
e
t
f
s
F
st
)]
(
[
)
(
t
f
s
F
L
0
dla
1
0
dla
0
)
(
t
t
t
f
0
1
1
0
)
(
)
(
0
1
1
)
(
)]
(
[
s
s
d
F
g
F
e
s
dt
e
s
F
t
f
st
st
L
0
,
)
(
a
e
t
f
at
0
)
(
0
)
(
1
0
)
(
1
)
(
)]
(
[
a
s
e
a
s
dt
e
dt
e
e
s
F
t
f
t
a
s
t
a
s
st
at
L
Metrologia II
63
Wybrane twierdzenia dotyczące przekształcenia Laplace’a.
1.
L[a·f(t)] = a·F(s);
a
- stała
2.
L[f
1
(t) ± f
2
(t)] = F
1
(s) ± F
2
(s)
3.
4.
5.
Przejście z postaci operatorowej do postaci czasowej:
f(t)=L
-1
{F(s)}
)
0
(
)
(
f
sF
dt
t
df
L
n
k
k
n
k
n
n
n
f
s
s
F
s
dt
t
f
d
1
)
(
1
)
0
(
)
(
)
(
L
s
s
F
dt
t
f
t
)
(
)
(
0
L
Metrologia II
64
Wybrane przykłady oryginałów i odpowiadających im transformat.
s
a
s
F
a
t
f
)
(
)
(
a
s
s
F
e
t
f
at
1
)
(
)
(
2
1
)
(
)
(
s
s
F
t
t
f
)
(
)
(
1
)
(
a
s
s
a
s
F
e
t
f
at
2
)
(
1
)
(
)
(
a
s
s
F
e
t
t
f
at
Metrologia II
65
Przekształcenie operatorowe liniowego równania różniczkowego n-tego
rzędu.
X(s), Y(s)
– transformaty Laplace’a sygnałów: wejściowego i wyjściowego
- transmitancja operatorowa
Y(s)=X(s)·G(s)
y(t)=L
-1
{L[x(t)]G(s)}=L
-1
{X(s)G(s)}
m
m
n
n
s
s
X
b
s
s
X
b
s
s
X
b
s
X
b
s
s
Y
a
s
s
Y
a
s
s
Y
a
s
Y
a
)
(
.......
)
(
)
(
)
(
)
(
.......
)
(
)
(
)
(
2
2
1
0
2
2
1
0
)
(
)
(
)
(
s
X
s
Y
s
G
m
n
s
a
s
a
s
a
a
s
b
s
b
s
b
b
s
X
s
Y
s
G
n
n
m
m
,
.......
......
)
(
)
(
)
(
2
2
1
0
2
2
1
0
X(s)
Y(s)
G(s)
Metrologia II
66
Przekształcenie Fouriera, transmitancja widmowa.
Sygnał harmoniczny
x(t)=X
m
sin(ωt+φ
x
)
, X
m
– amplituda; ω - pulsacja; φ
x
– faza
y(t)=Y
m
sin(ωt+φ
y
)
Transformata Fouriera, przypadek transformaty Laplace’a gdy w operatorze
s=σ+jω , σ=0 →G(s)≡G(jω)
- transmitancja widmowa
)
(
)
(
)
(
.......
)
(
)
(
)
(
......
)
(
)
(
)
(
2
2
1
0
2
2
1
0
j
X
j
Y
j
a
j
a
j
a
a
j
b
j
b
j
b
b
j
G
n
n
m
m
x
m
φ
x
x
t
2
Metrologia II
67
Sinusoidalny przebieg wyjściowy można określić znając transmitancję widmową
G(jω)
oraz
przebieg harmonicznego sygnału wejściowego
Y(jω)=X(jω)G(jω)
Sygnał wejściowy w postaci trygonometrycznie zapisanej funkcji zespolonej
zapis trygonometryczny zapis wykładniczy
Sygnał wyjściowy
,
Y
m
– amplituda
harmonicznego
sygnału wyjściowego
)
(
)
sin(
)
cos(
)
(
x
t
j
m
x
x
m
e
X
t
j
t
X
j
X
)
(
)
sin(
)
cos(
)
(
y
t
j
m
y
y
m
e
Y
t
j
t
Y
j
Y
)
(
)
(
)
(
)
(
)
(
)
(
x
y
x
y
j
m
m
t
j
m
t
j
m
e
X
Y
e
X
e
Y
j
X
j
Y
j
G
Metrologia II
68
- moduł transmitancji widmowej
φ=φ
y
-φ
x
– argument transmitancji widmowej
Transmitancja widmowa wyrażona algebraicznie
Charakterystyki częstotliwościowe:
- amplitudowa
|G(jω)|=f(ω
)
- fazowa
φ=g(ω)
m
m
X
Y
j
G
)
(
)
(
)
(
)
(
jQ
P
j
G
)
(
)
(
)
(
2
2
Q
P
X
Y
j
G
m
m
)
(
)
(
P
Q
arctg
Metrologia II
69
Ocena własności dynamicznych przetworników
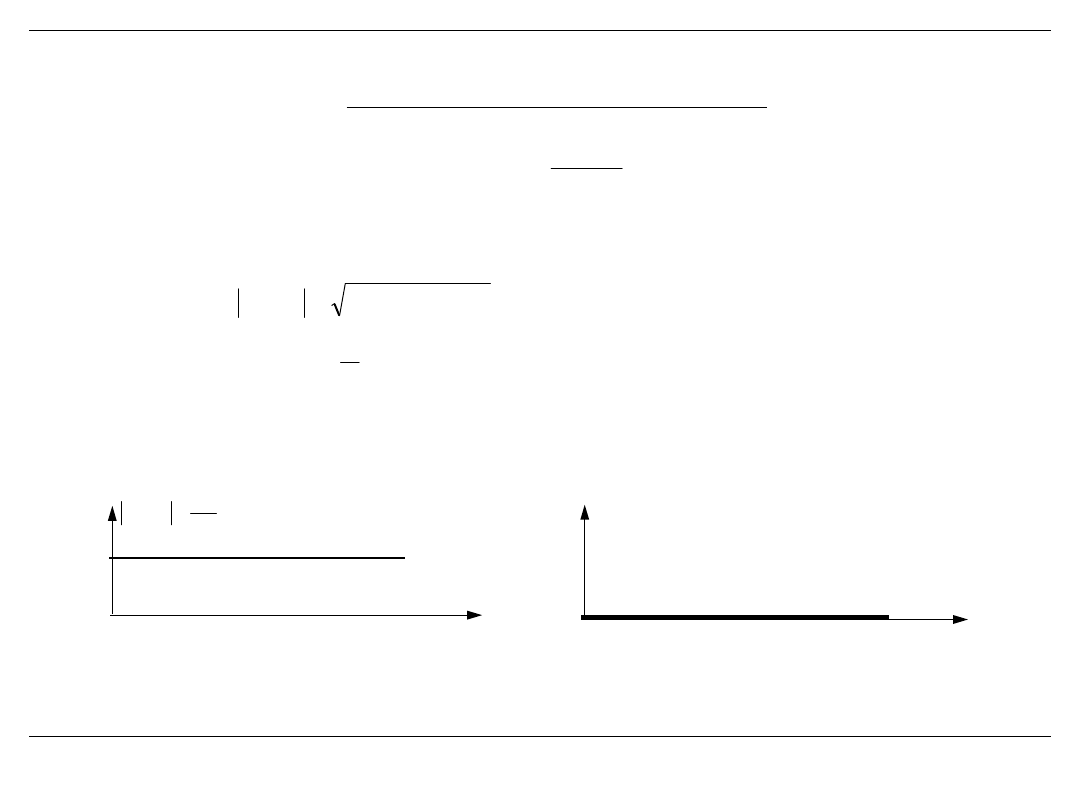
Sygnały standardowe stosowane do oceny własności dynamicznych przetworników:
- skok jednostkowy
x(t)=A 1(t)
- skok prędkości
x(t)=at 1(t)
- impuls Diraca
x(t)=δ(t)
X(s)=1
x
t
A
s
A
s
X
)
(
2
)
(
s
a
s
X
x
t
α=arctg
a
t
x
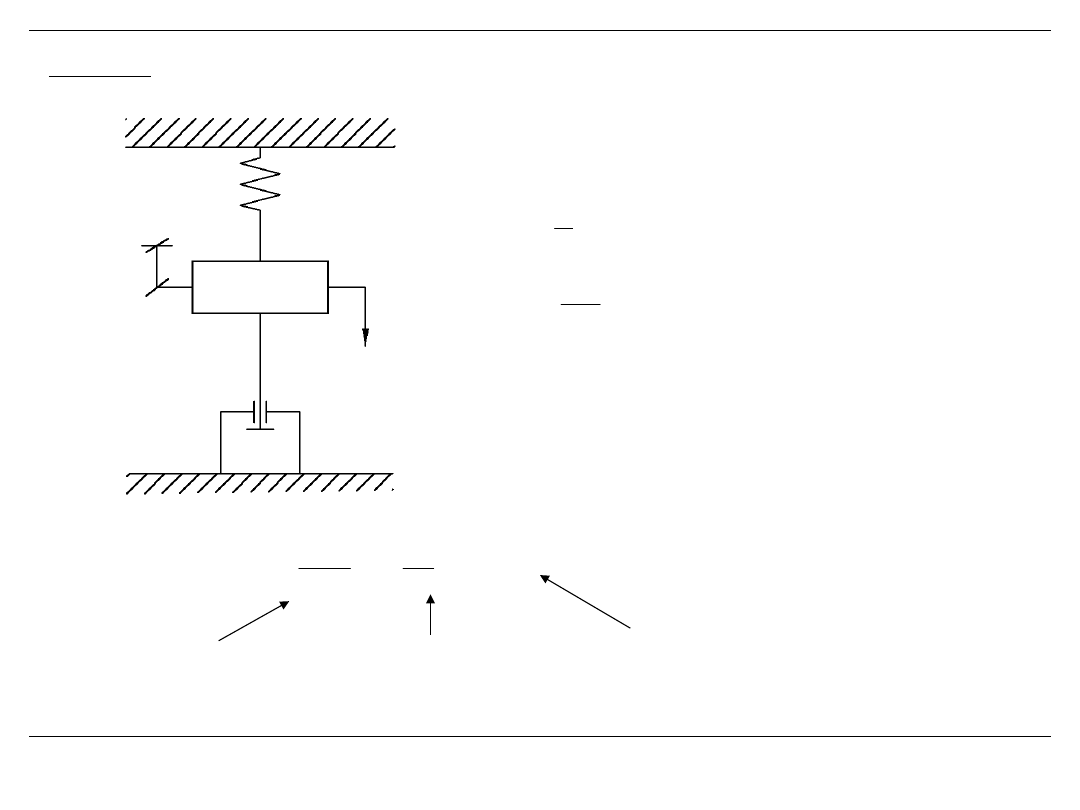
Metrologia II
70
Przetwornik 0-go rzędu
a
0
y(t)=b
0
x(t)
transformata
a
0
Y(s)=b
0
X(s)
Transmitancja
- czułość
Charakterystyki czasowe przetwornika
a) odpowiedź na wymuszenie skokowe
x(t)=A 1(t)
S
a
b
s
X
s
Y
s
G
0
0
)
(
)
(
)
(
AS
S
s
A
S
t
A
t
y
1
1
1
L
L
L
}
)]
(
[
{
)
(
y
t
AS
A
x
t
Metrologia II
71
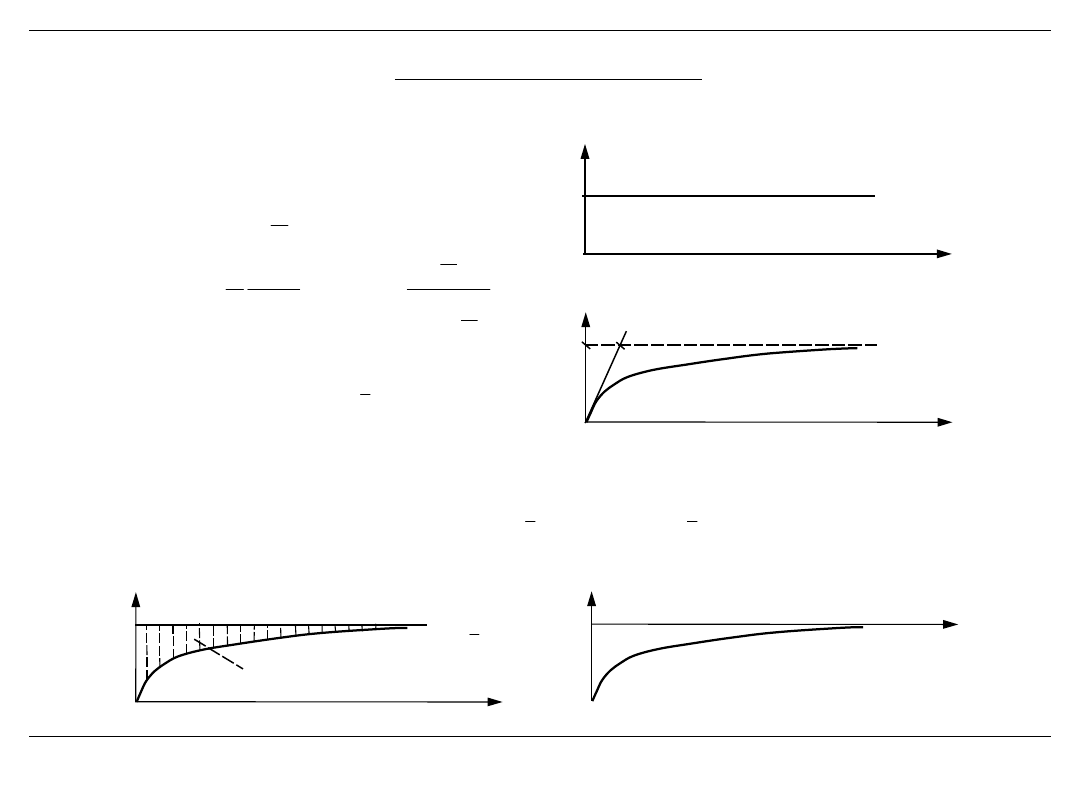
b) odpowiedź na skok prędkości sygnału (sygnał liniowy)
x(t)=at
x=at
x
t
α=arctg
a
aSt
S
s
a
S
at
t
y
2
1
1
}
]
[
{
)
(
L
L
L
y
t
β=arctg
aS
y=a
St
Metrologia II
72
Charakterystyki częstotliwościowe:
Transmitancja widmowa
Charakterystyka amplitudowo-częstotliwościowa Charakterystyka fazowo-
częstotliwościowa
S
j
X
j
Y
j
G
)
(
)
(
)
(
0
)
(
)
(
)
(
j
S
jQ
P
j
G
S
P
Q
P
j
G
)
(
)
(
)
(
)
(
2
2
0
0
S
arctg
S
ω
m
m
X
Y
j
G
)
(
φ=φ
y
-φ
x
ω
Metrologia II
73
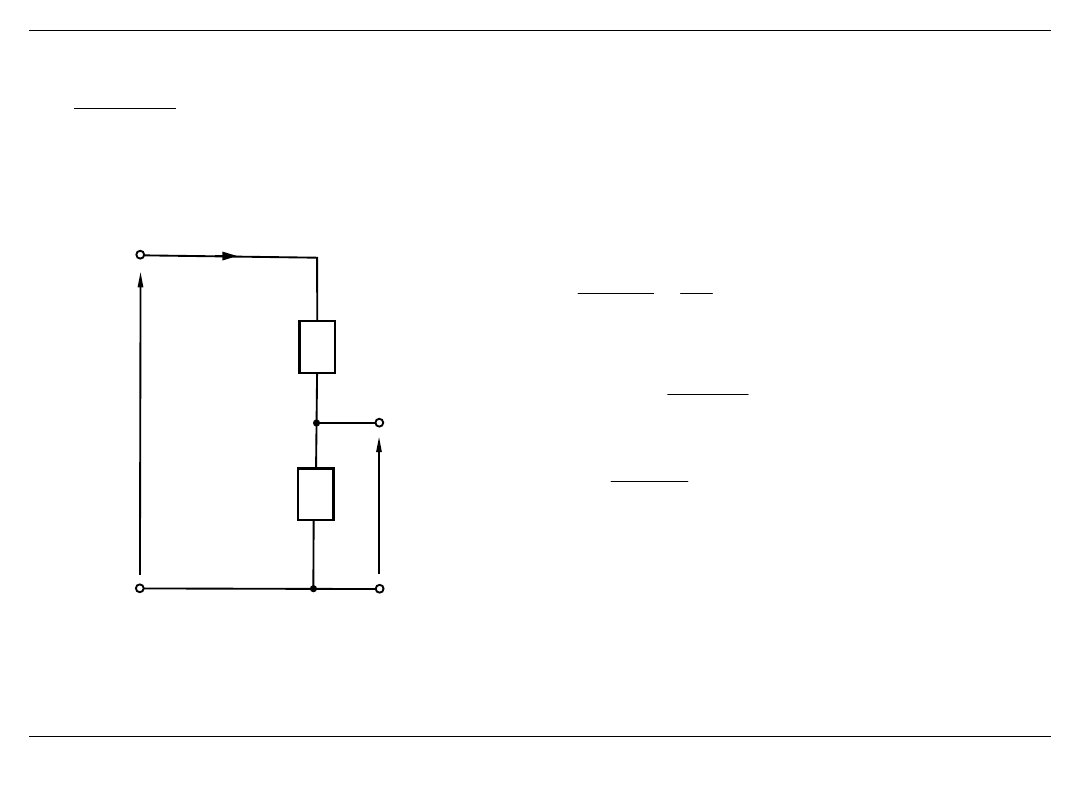
Przykład:
dzielnik napięcia
y=U
2
R
1
R
2
x=U
1
I
2
2
2
1
1
R
U
R
R
U
2
1
2
1
2
R
R
R
U
U
.
2
1
2
const
R
R
R
S
Metrologia II
74
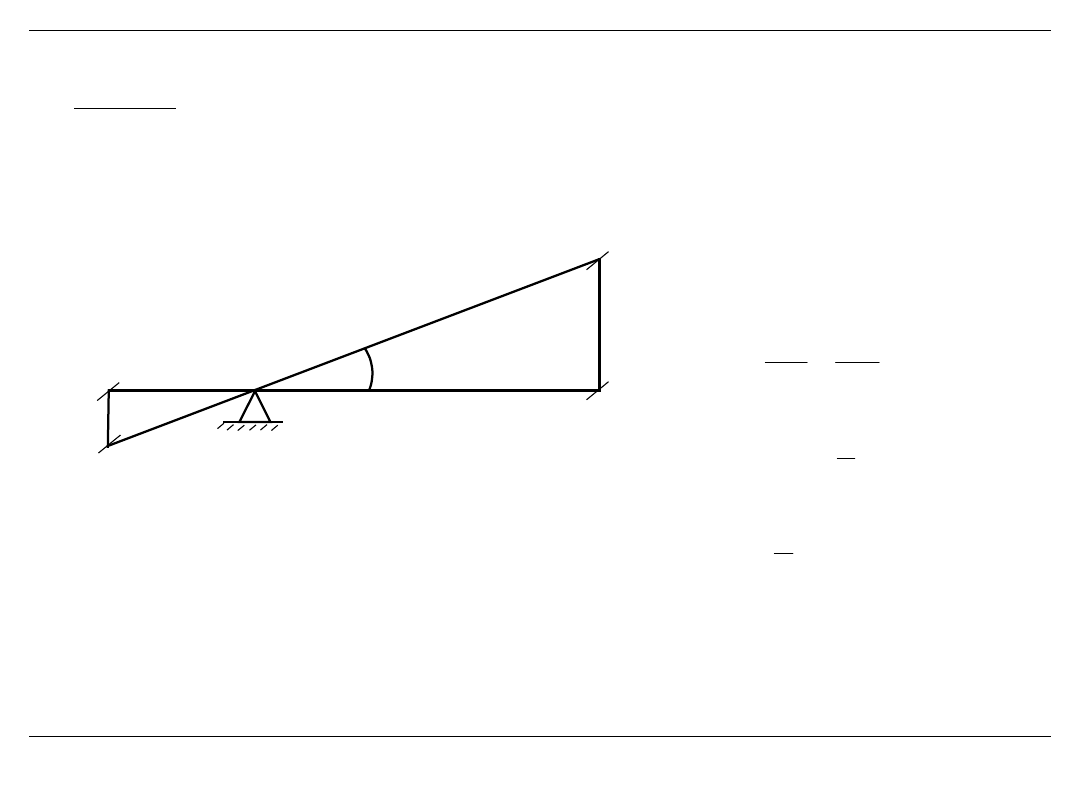
Przykład:
dźwignia mechaniczna
Dla małych przemieszczeń
tg
b
t
y
a
t
x
)
(
)
(
)
(
)
(
t
x
a
b
t
y
S
a
b
α
y(t)
x(t)
a
b
Metrologia II
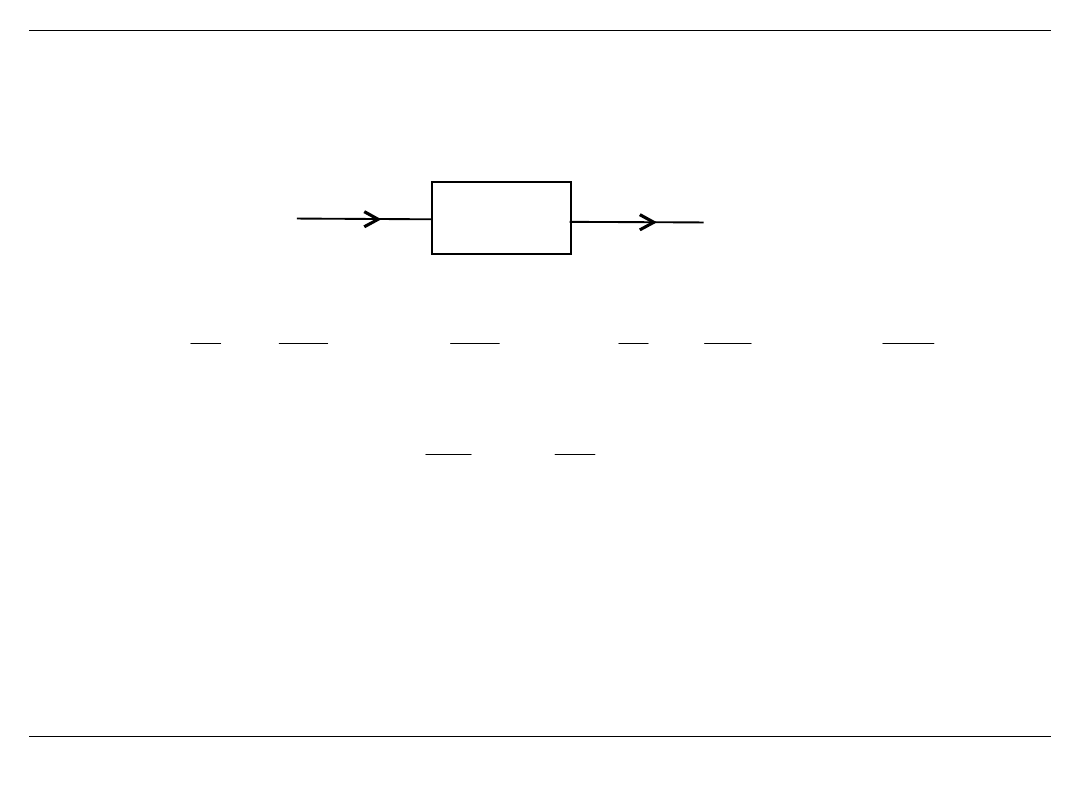
75
Przetworniki I-go rzędu.
Model przetwornika
Operatorowo
Podstawienia
Transmitancja operatorowa
x
b
y
a
dt
dy
a
0
0
1
S
a
b
0
0
T
a
a
0
1
0
0
0
1
a
s
X
b
s
Y
a
s
s
Y
a
:
/
)
(
)
(
)
(
Ts
S
s
X
s
Y
s
G
1
)
(
)
(
)
(
)
(
)
(
)
(
s
X
a
b
s
Y
s
s
Y
a
a
0
0
0
1
)
(
)
(
)
(
s
SX
s
Y
s
s
TY
Metrologia II
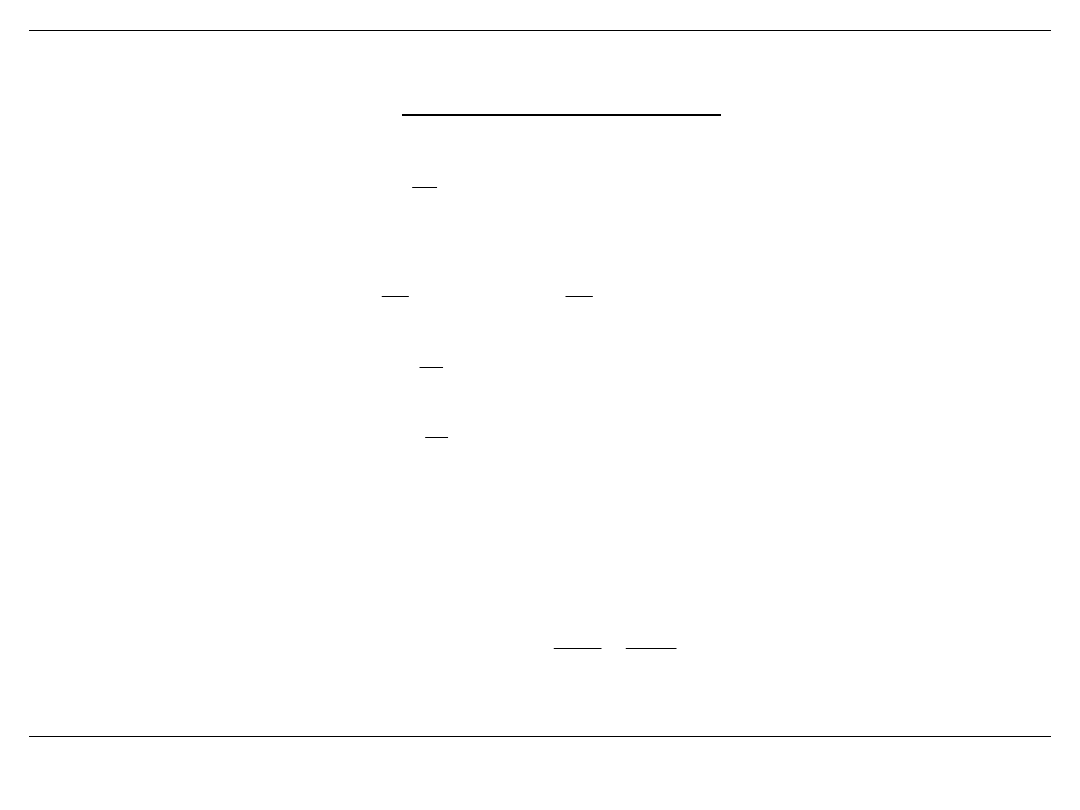
76
Charakterystyki czasowe:
a) Przenoszenie sygnału skokowego
Błąd dynamiczny przetwornika I-go rzędu przy wejściowym sygnale skokowym:
x
t
A
x
t
AS
T
y
t
AS
y
i
=AS
Δy
d
)
1
(
T
t
rz
e
AS
y
t
-AS
Δy
d
)
(
1
)
(
t
A
t
x
s
A
s
X
)
(
T
s
s
T
AS
Ts
S
s
A
t
y
1
1
1
)
(
1
1
L
L
T
t
e
AS
t
y
1
)
(
T
t
T
t
i
rz
d
ASe
AS
e
AS
y
y
y
1
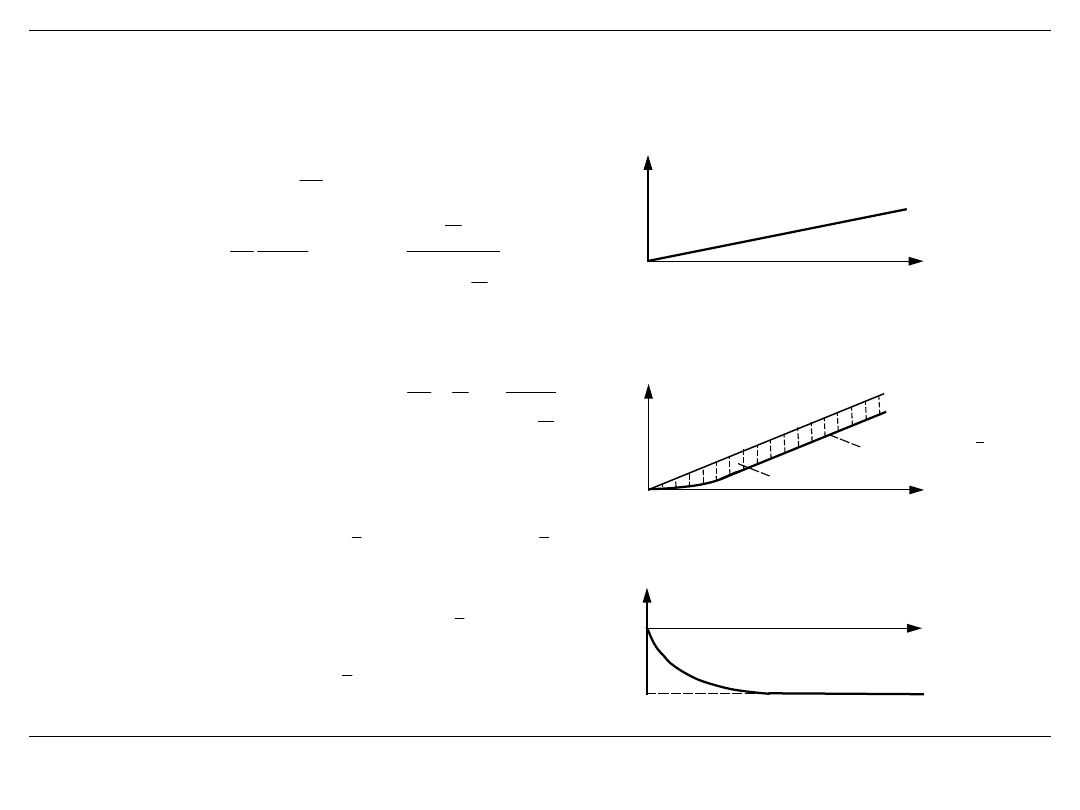
Metrologia II
77
b) Przenoszenie sygnału liniowego (skok prędkości)
po rozkładzie na ułamki proste:
Korzystając z tablic otrzymuje się oryginał
sygnału wyjściowego
t
x
x=at
y
i
=aS
t
t
y
d
y
)
1
(
T
t
rz
e
aST
aSt
y
t
Δy
d
-aST
at
t
x
)
(
2
)
(
s
a
s
X
T
s
s
T
aS
Ts
S
s
a
t
y
s
1
1
1
2
1
1
L
L
)
(
T
s
T
s
T
s
aS
t
y
1
1
1
2
1
L
)
(
T
t
T
t
e
aST
aSt
Te
T
t
aS
t
y
1
)
(
aSt
e
aST
aSt
y
y
y
T
t
i
rz
d
1
T
t
d
e
aST
y
1
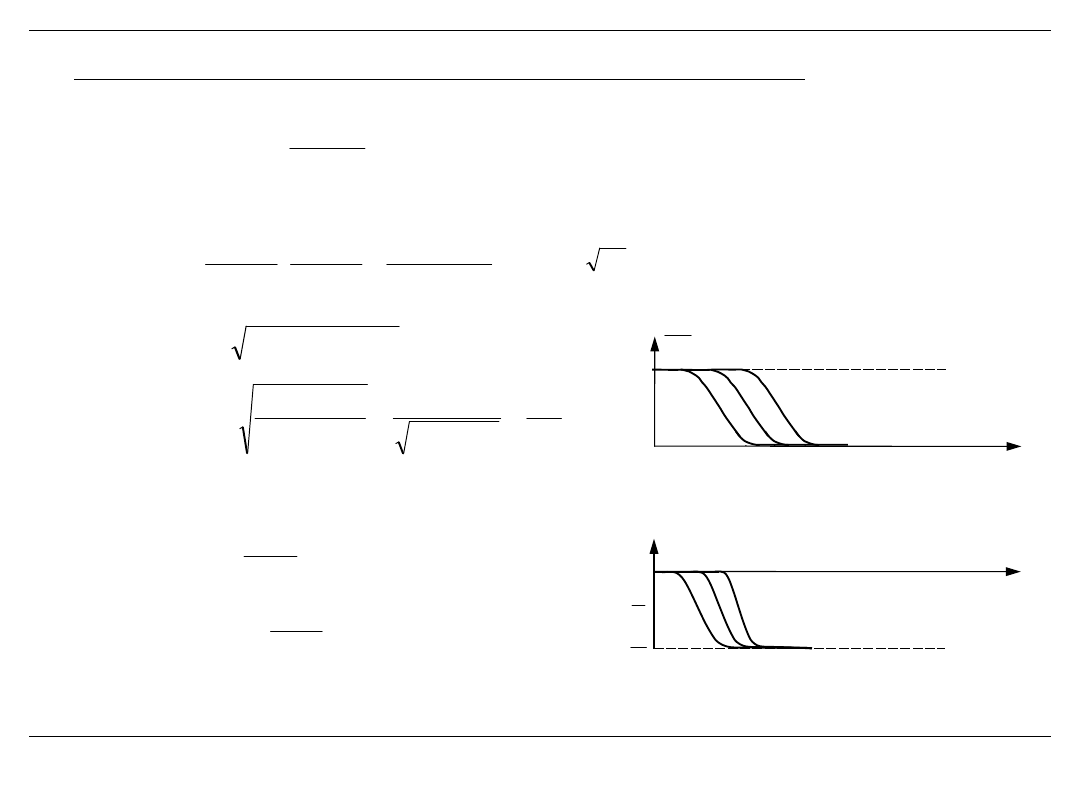
Metrologia II
78
Charakterystyki częstotliwościowe przetworników I-go rzędu:
-transmitancja widmowa
Charakterystyka amplitudowo częstotliwościowa
Charakterystyka fazowo-częstotliwościowa
T
j
S
j
G
1
)
(
,
1
1
1
1
1
2
)
(
)
(
)
(
T
T
j
S
T
j
T
j
T
j
S
j
G
;
1
j
1
2
j
)
(
)
(
|
)
(
|
2
2
Q
P
j
G
m
m
X
Y
T
S
T
T
S
j
G
2
2
2
2
)
(
1
)
(
1
)
(
1
|
)
(
|
)
(
)
(
P
Q
tg
)
(
)
(
Q
P
arctg
)
( T
arctg
|G(jω)|
S
przetwornik idealny
m
m
X
Y
T
1
T
2
T
3
T
1
<T
2
<T
3
ω
przetwornik idealny
T
1
T
2
T
3
ω
φ
2
4
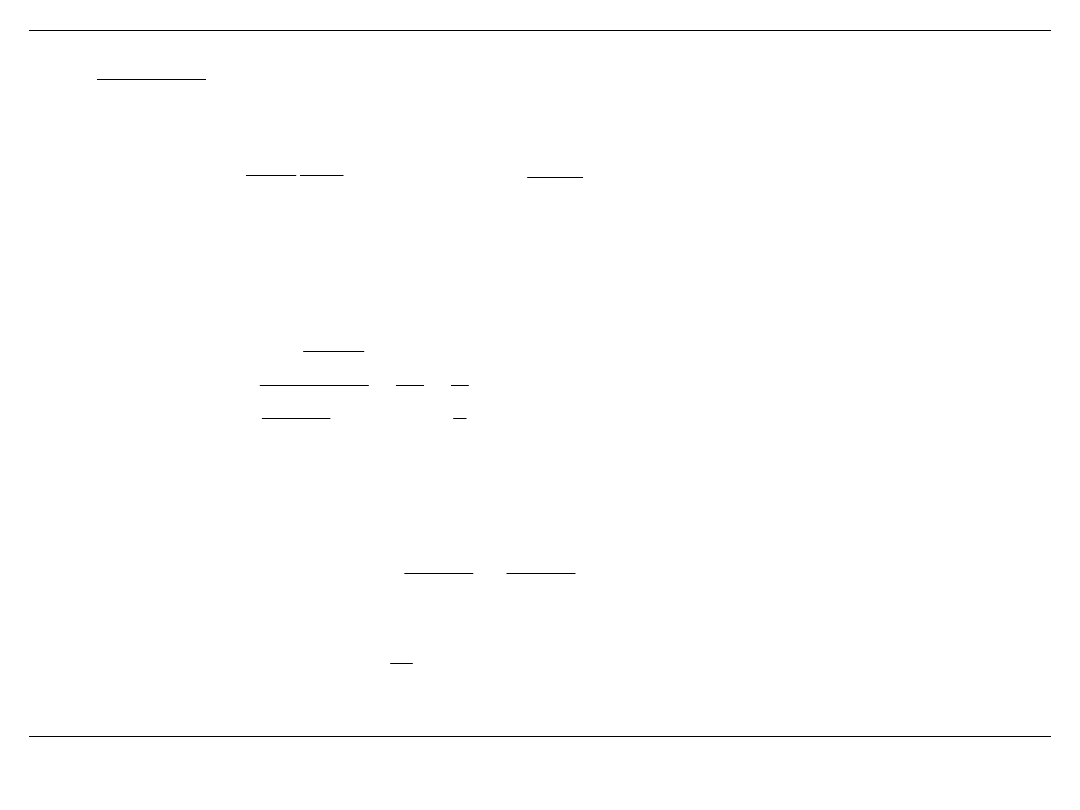
Metrologia II
79
Przykład:
nawiązanie do przykładu I
-stała czasowa
θ=x
temp. mierzona (ośrodka)
θ
w
=y
temp. wskazywana przez termometr
w
w
dt
d
A
c
m
T
A
c
m
s
s
J
J
W
J
m
K
m
W
K
kg
J
kg
2
2
)
(
)
(
)
(
s
s
s
s
T
w
w
Ts
s
s
s
G
w
1
1
)
(
)
(
)
(
K
K
1
S
Metrologia II
80
Przykład:
Temperatura ośrodka wynosi ok. 60°C. Wyznaczyć czas, po którym można odczytać
temperaturę ośrodka mierzoną termometrem o stałej czasowej
T
= 60 s, aby błąd
dynamiczny pomiaru był nie większy niż 1°C. Temperatura termometru przed pomiarem
wynosi 20°C.
Zadanie dotyczy odpowiedzi przetwornika I-go rzędu na skok sygnału wejściowego
θ
0
=20°C
temp. początkowa
θ=60°C
temp. końcowa
T
t
d
ASe
y
0
A
T
t
d
e
y
)
C
20
C
60
(
C
1
d
y
;
40
1
T
t
e
;
40
1
T
t
e
;
40
1
ln
T
t
;
40
1
ln
T
t
s
222
7
3
6
3
2
40
1
T
T
T
t
,
)
,
(
)
ln
(ln
K
K
1
S
Metrologia II
81
Przykład:
Stała czasowa termometru
T
=3 s, po czasie
t
=3 s temperatura wskazywana przez
termometr wynosi 60°C. obliczyć temperaturę ośrodka, w którym termometr jest
zanurzony.
θ
m
-temp. mierzona (wskazywana przez
termometr)
θ
0
-temp. ośrodka
T
t
m
e
1
0
C
94
1
1
60
1
0
e
e
T
t
m
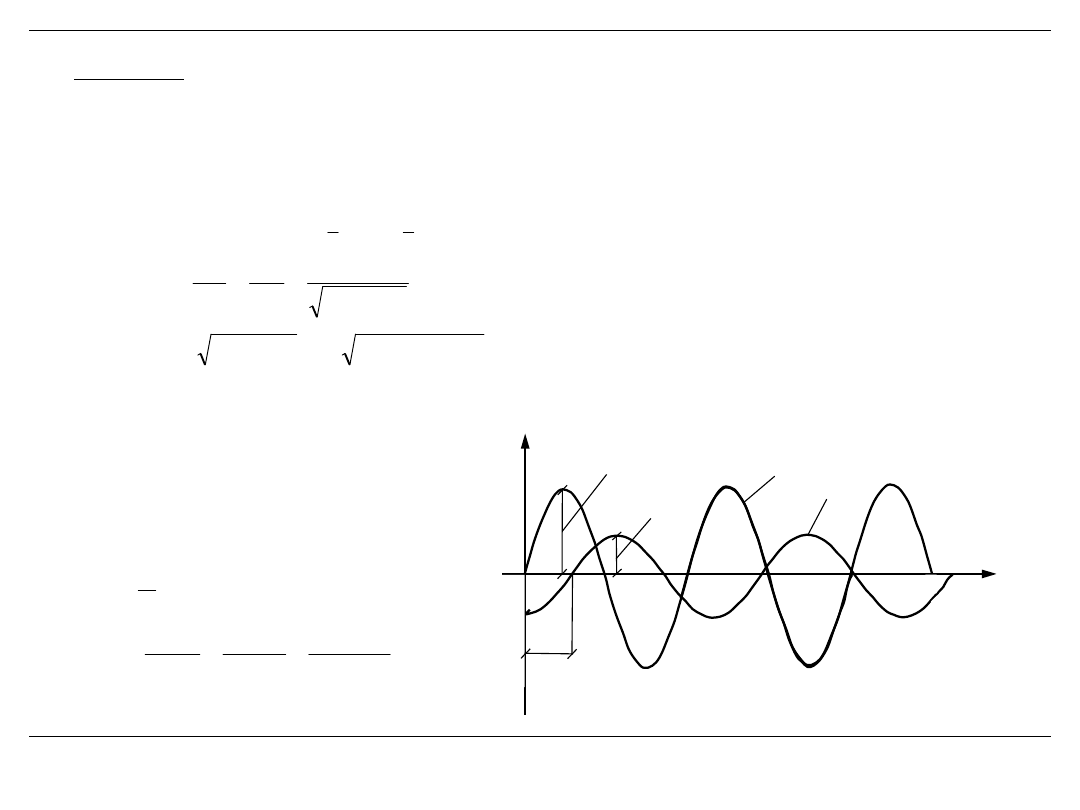
Metrologia II
82
θ
w
θ
m
t
20,6°C
θ
w
θ
m
10°C
17s
Przykład:
Sinusoidalnie zmienną temperaturę mierzono termometrem o stałej czasowej
T
=30 s.
Częstotliwość zmian temperatury
f
=0,01 Hz. Amplituda wskazań termometru wynosi
θ
wm
=10°C. wyznaczyć amplitudę zmian temperatury mierzonej
θ
mm
i opóźnienie wskazań
termometru.
Okres sinusoidy
τ
odpowiada
kątowi 2
π
rad. =6,28 rad
τ
→ 6,28 rad. Kątowi
φ
odpowiada czas
t
1
t
1
→
1,06 rad
s
1
06
0
s
1
01
0
14
3
2
2
,
,
,
f
2
)
(
1
|
)
(
|
T
S
X
Y
j
G
wm
wm
m
m
C
6
,
20
)
30
06
,
0
(
1
10
)
(
1
2
2
T
wm
mm
rad
arctg
arctg
T
arctg
06
,
1
8
,
1
)
30
06
,
0
(
)
(
f
1
s
17
01
0
28
6
06
1
28
6
06
1
28
6
06
1
1
,
,
,
,
,
,
,
f
t
Metrologia II
83
Przetworniki II-go rzędu.
Model matematyczny
Podstawienia:
ω
0
— pulsacja drgań nietłumionych
ξ
— względny współczynnik tłumienia
S
— czułość
Postać operatorowa
—transmitancja operatorowa
0
0
0
1
2
2
2
:
/ a
x
b
y
a
dt
dy
a
dt
y
d
a
x
a
b
y
dt
dy
a
a
dt
y
d
a
a
0
0
0
1
2
2
0
2
,
2
0
0
a
a
,
2
2
0
1
a
a
a
0
0
a
b
S
2
0
0
2
2
0
/
)
(
)
(
)
(
2
)
(
1
s
SX
s
Y
s
s
Y
s
s
Y
)
(
)
2
)(
(
2
0
2
0
0
2
s
X
S
s
s
s
Y
2
0
0
2
2
0
2
)
(
)
(
)
(
s
s
S
s
X
s
Y
s
G
Metrologia II
84
Własności dynamiczne w dziedzinie czasu.
a) Przenoszenie sygnału skokowego
sygnał wyjściowy
Dla wyznaczenia oryginału rozkłada się wyrażenia na ułamki proste przedstawiając
trójmian
w mianowniku w postaci iloczynowej
(s-s
1
)(s-s
2
).
Ze względu na wartość
ξ
wyróżnia się dwa przypadki:
1a)
ξ
>1 pierwiastki s
1
i s
2
są rzeczywiste, różne
wówczas
1b)
ξ
=1 przypadek graniczny, istnieje jeden pierwiastek podwójny
s
1
=s
2
wówczas
)
(
1
)
(
t
A
t
x
2
0
2
0
2
2
0
1
1
2
)}
(
)]
(
[
{
)
(
s
s
S
s
A
s
G
t
x
t
y
L
L
L
)
1
(
4
4
4
4
2
2
0
2
0
2
0
2
2
ac
b
1
2
1
2
2
2
0
2
0
0
2
,
1
s
,
1
)
1
1
0
)
2
,
)
(
2
2
1
1
2
1
1
1
T
t
T
t
e
T
e
T
T
T
AS
t
y
1
1
,
2
0
2
1
T
T
,
1
1
)
(
T
t
e
T
t
AS
t
y
0
1
T
Metrologia II
85
2) 0 <
ξ
< 1 wówczas trójmian ma dwa pierwiastki nierzeczywiste, które są liczbami
zespolonymi
sprzężonymi.
wówczas odpowiedź ma przebieg
—pulsacja drgań tłumionych
)
sin(
1
1
1
)
(
1
2
0
t
e
AS
t
y
t
2
0
1
1
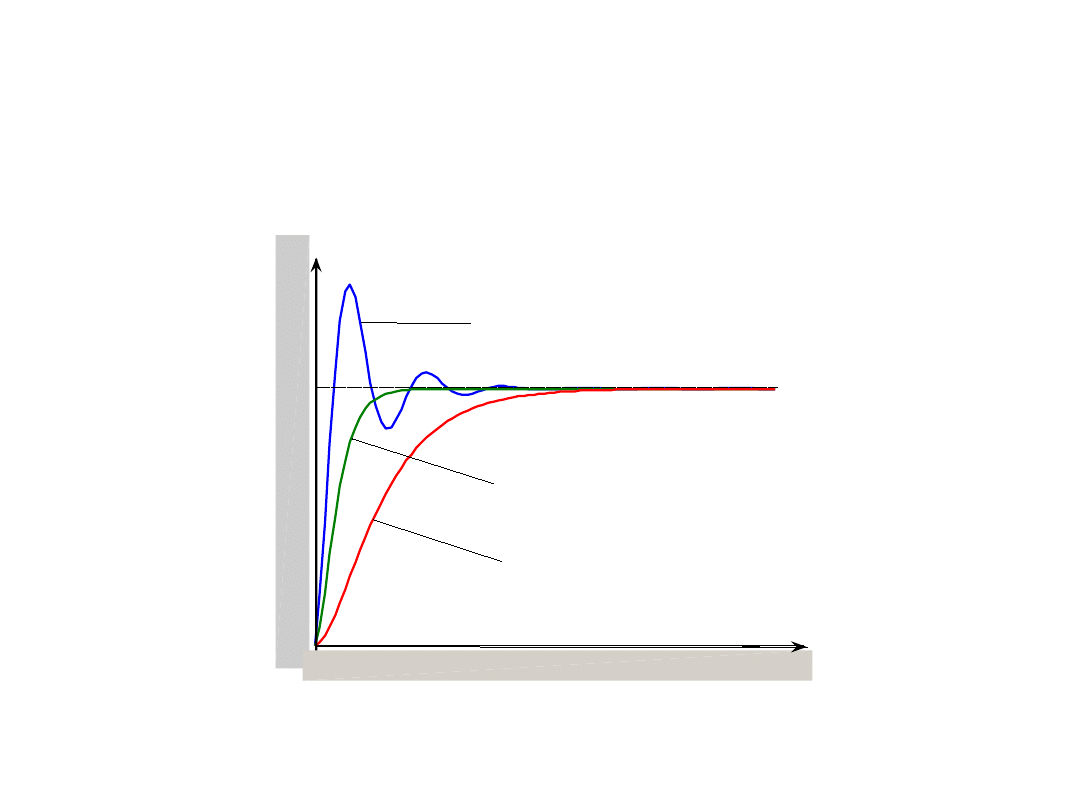
Metrologia II
86
t
AS
y
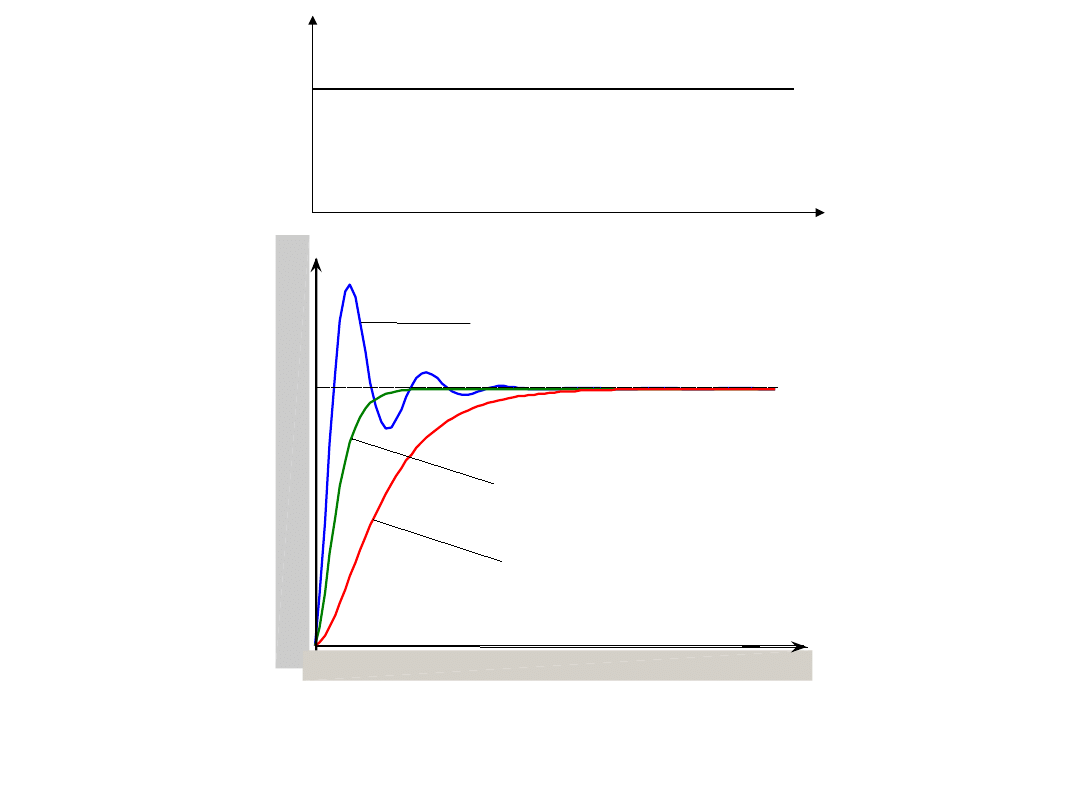
Metrologia II
87
t
AS
y
x
t
A
0 1
= 1
1
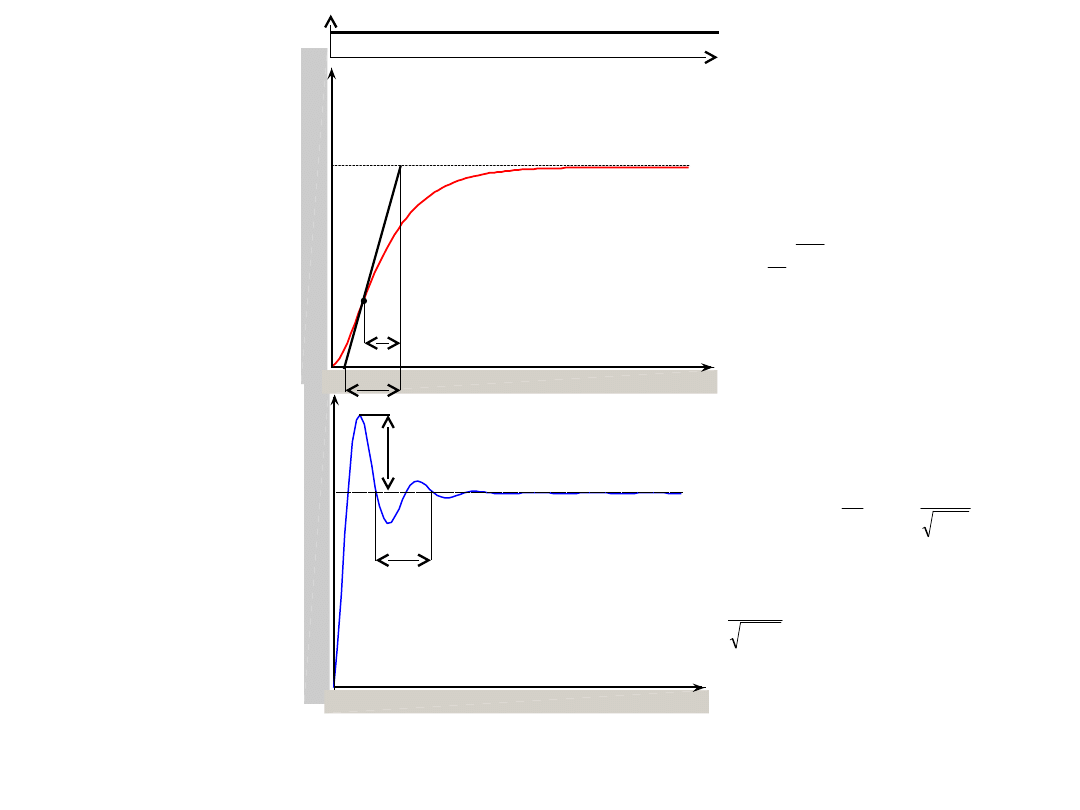
Metrologia II
88
t
AS
y
x
t
A
t
AS
y
m
y
1
1
0
T
I
T
II
1
1
2
2
1
2
1
2
1
T
T
T
II
I
T
T
T
T
T
T
T
2
1
0
1
1
ξ
-
1
ω
ω
,
τ
π
2
ω
1
- okres oscylacji
tłumionych
y
m
- przelot
)
ξ
1
ξπ
exp(
2
m
AS
y
Metrologia II
89
2
0
0
2
2
0
2
)
(
)
(
)
(
s
s
S
s
X
s
Y
s
G
2
0
0
2
2
0
)
(
2
)
(
)
(
)
(
)
(
j
j
S
j
X
j
Y
j
G
2
0
2
2
0
0
2
0
0
2
0
0
2
0
0
2
0
0
2
0
2
1
2
1
)
(
2
1
2
1
2
1
2
1
)
(
j
S
j
G
j
j
j
S
j
S
j
G
0
0
2
0
2
2
0
2
arctg
)
(
2
1
)
(
S
j
G
WŁASNOŚCI DYNAMICZNE PRZETWORNIKA II-GO RZĘDU W DZIEDZINIE CZĘSTOTLIWOŚCI
Transmitancja widmowa przetwornika po wstawieniu w transmitancji operatorowej s = j
Charakterystyka Charakterystyka
amplitudowo-częstotliwościowa fazowo-
częstotliwościowa
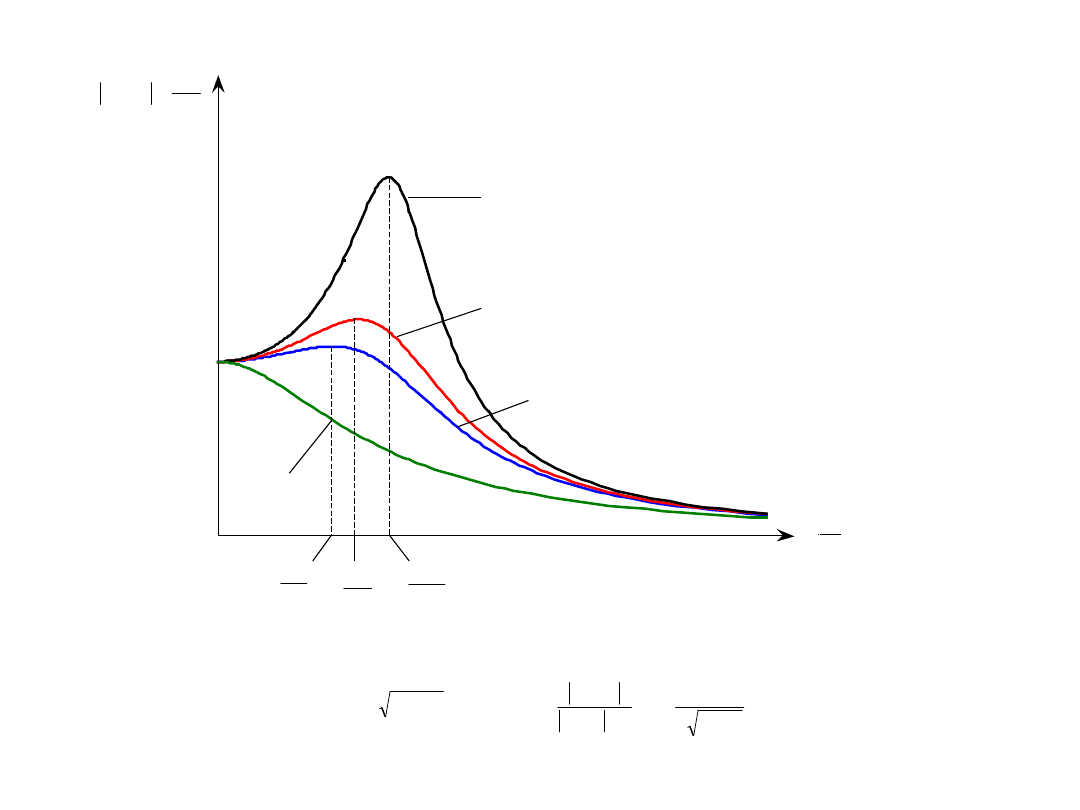
Metrologia II
90
Wykres charakterystyki amplitudowo-częstotliwościowej
przetwornika II-go rzędu
m
m
X
Y
j
G
)
(
2
0
2
1
r
2
0
1
1
5
,
0
(
)
(
j
G
j
G
M
r
0
1
r
2
r
3
r
1
2
3
4
1
2
3
4
r
– pulsacja rezonansowa, przy której moduł rezonansowy M
r
osiąga
wartość maksymalną
S
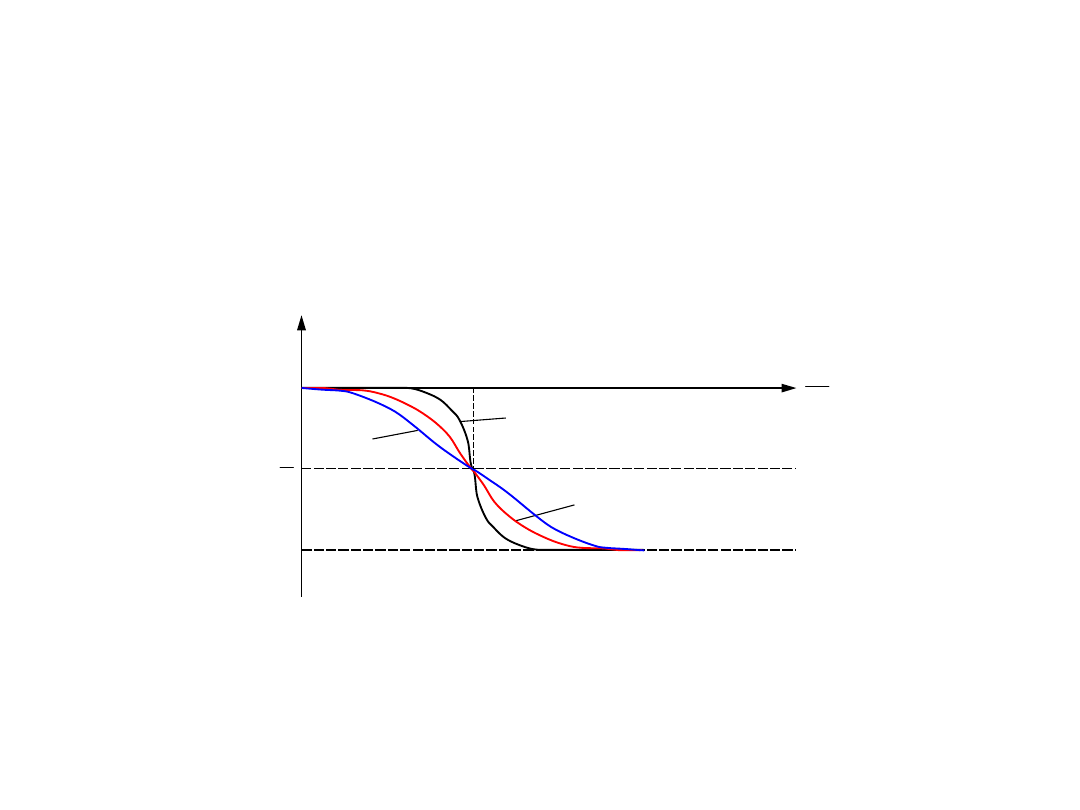
Metrologia II
91
0
φ
-π
2
ξ
1
ξ
2
ξ
3
Wykres charakterystyki fazowo-częstotliwościowej przetwornika
II-go rzędu
1
2
3
1
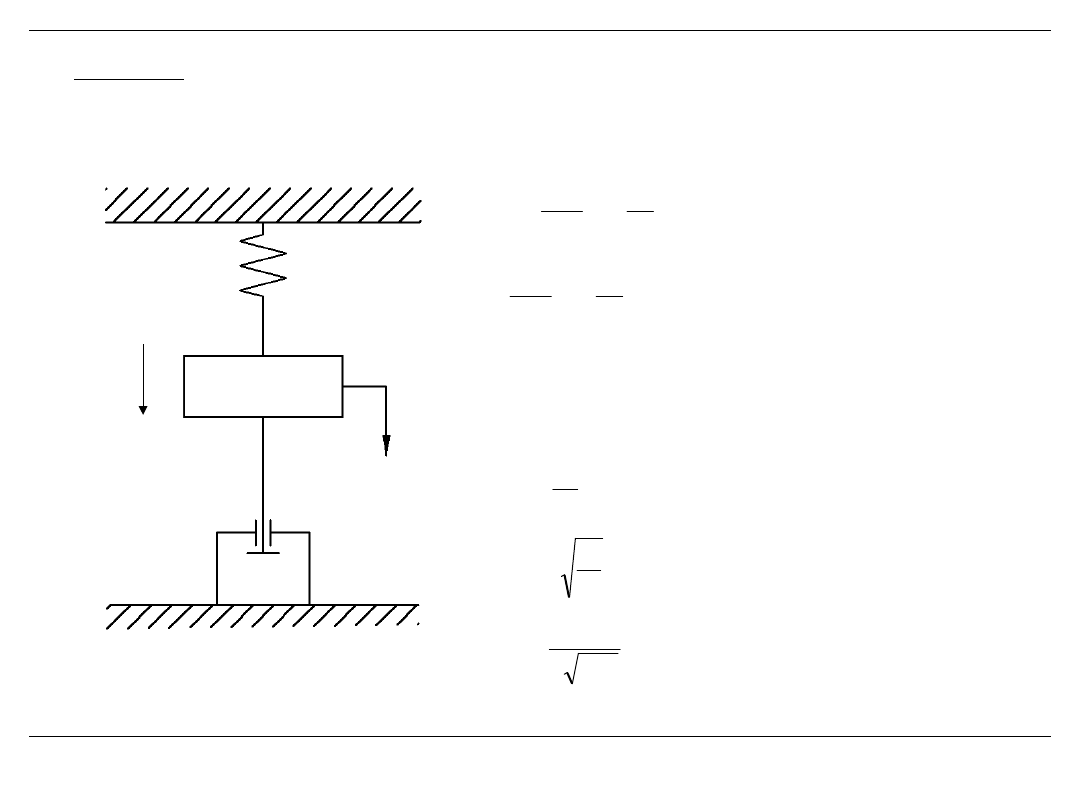
Metrologia II
92
Przykład:
k
s
f(t)
B
m
y(t
)
)
(
)
(
0
0
2
2
t
f
y
k
y
y
k
dt
dy
B
dt
y
d
m
s
s
)
(
2
2
t
f
y
k
dt
dy
B
dt
y
d
s
m
a
2
B
a
1
s
k
a
0
1
0
b
s
k
S
1
m
k
s
0
m
k
B
s
2
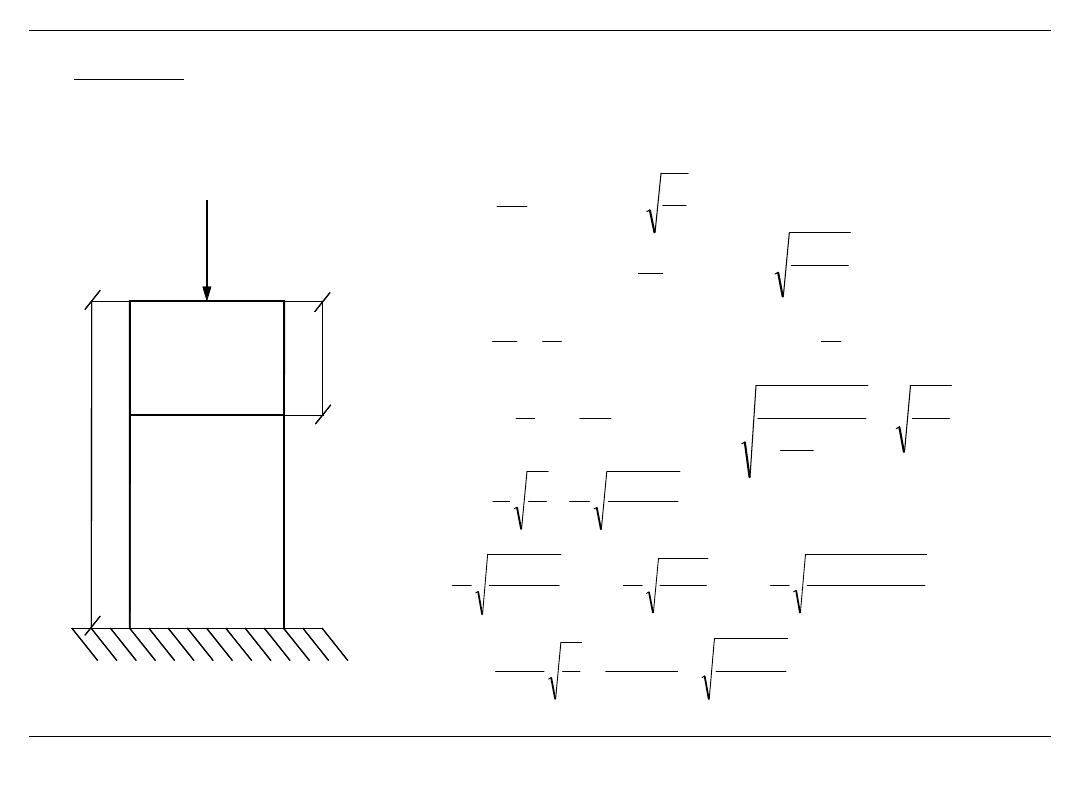
Metrologia II
93
Przykład:
Dla stalowego elementu sprężystego czujnika siły wyznaczyć częstotliwość drgań własnych
f
0
. Dane: moduł Younga
E
=210·10
9
Pa,
l
0
=0,1 m, gęstość
ρ
=7,8·10
3
kg/m
3
.
—z prawa Hooke’a
2
0
0
f
m
k
s
0
V
m
l
F
k
s
V
l
F
0
E
l
l
0
1
A
F
3
0
0
m
kg
Pa
m
1
E
l
l
1
2
3
2
s
kg
m
s
m
kg
m
1
kg
m
N
m
1
m
kg
m
N
m
1
Hz
8260
10
8
7
10
21
1
0
28
6
1
2
1
3
10
0
0
,
,
,
E
l
f
EA
F
l
E
l
l
0
0
2
0
0
0
0
l
E
Al
EA
F
l
F
m
F
Δl
l
0
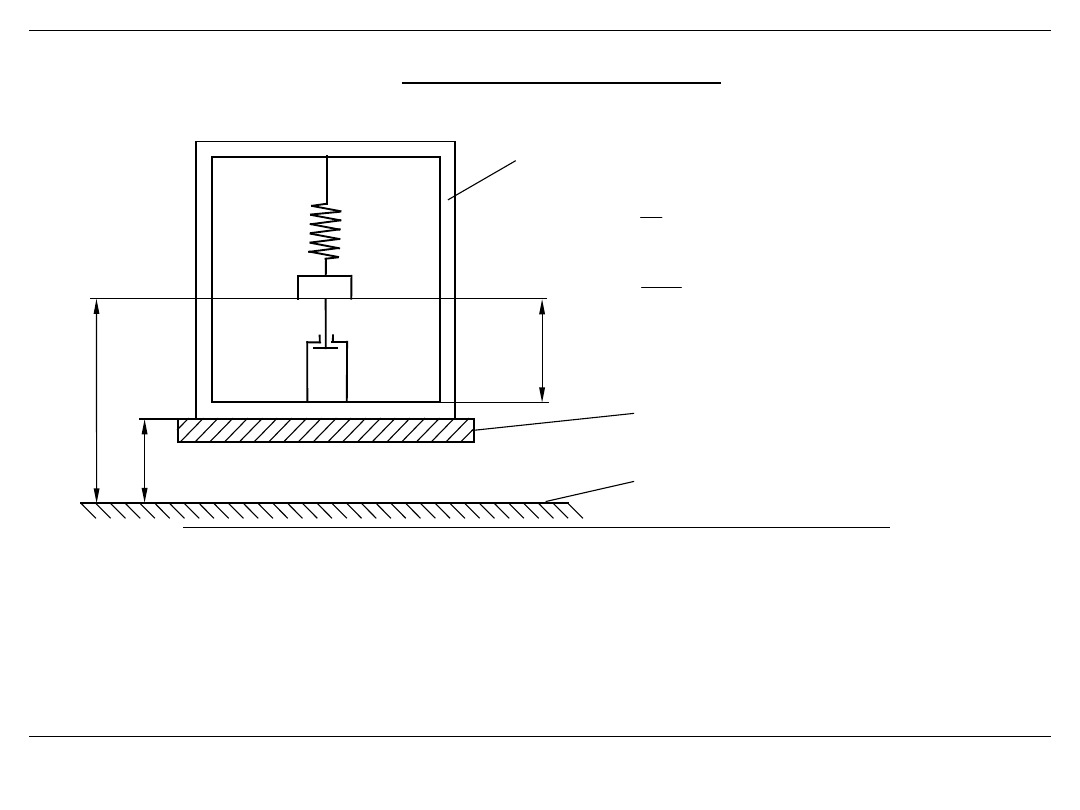
Metrologia II
94
Przetwornik sejsmiczny.
obudowa czujnika
—sztywność sprężyny
—współczynnik tłumienia
—masa
element sztywno związany
z obudową czujnika
poziom odniesienia
Sejsmiczny czujnik do pomiaru przemieszczeń—wibrometr.
x(t)
—sygnał wejściowy—przemieszczenie obudowy przetwornika względem poziomu
odniesienia
y(t)
—sygnał wyjściowy—przemieszczenie masy względem obudowy
u(t)
—przemiesczenie masy względem poziomu odniesienia
m
N
s
k
m/s
N
B
[kg]
m
k
s
m
y(t)
u(t)
x(t)
B
Metrologia II
95
Równanie równowagi sił działających na ciężar o masie m.
—siły bezwładności, tłumienia, sprężystości
podstawienia:
—pulsacja drgań swobodnych
—względny współczynnik tłumienia
0
s
t
b
F
F
F
s
t
b
F
F
F
,
,
2
2
dt
u
d
m
F
b
dt
dy
B
F
t
y
k
F
s
s
)
(
)
(
)
(
t
x
t
y
t
u
0
2
2
y
k
dt
dy
B
dt
u
d
m
s
0
)
(
2
2
y
k
dt
dy
B
dt
x
y
d
m
s
2
2
2
2
dt
x
d
m
y
k
dt
dy
B
dt
y
d
m
s
2
2
2
2
dt
x
d
k
m
y
dt
dy
k
B
dt
y
d
k
m
s
s
s
m
k
s
0
m
k
B
s
2
2
2
2
0
0
2
2
0
1
2
1
dt
x
d
y
dt
dy
dt
y
d
Metrologia II
96
Transformata Laplace’a obu stron
2
2
0
0
2
2
0
)
(
1
)
(
)
(
2
)
(
1
s
s
X
s
Y
s
s
Y
s
s
Y
1
2
)
(
)
(
)
(
0
2
0
2
2
0
2
s
s
s
s
X
s
Y
s
G
0
2
0
2
0
2
1
)
(
)
(
)
(
j
j
X
j
Y
j
G
j
s
2
1
)
(
2
2
j
j
G
0
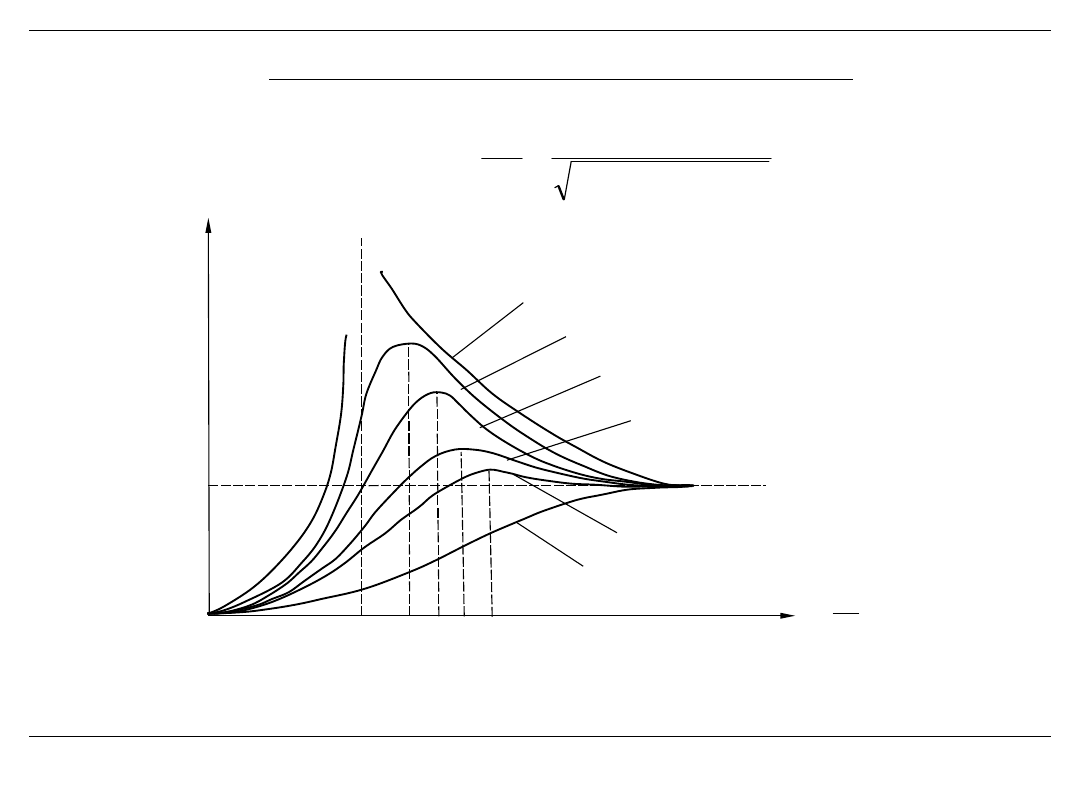
Metrologia II
97
Charakterystyka amplitudowo-częstotliwościowa
2
2
2
2
)
2
(
)
1
(
|
)
(
|
m
m
X
Y
j
G
6
5
4
3
2
1
0
|
)
(
|
j
G
1
1
r
1
1
2
r
3
r
4
r
2
3
4
5
6
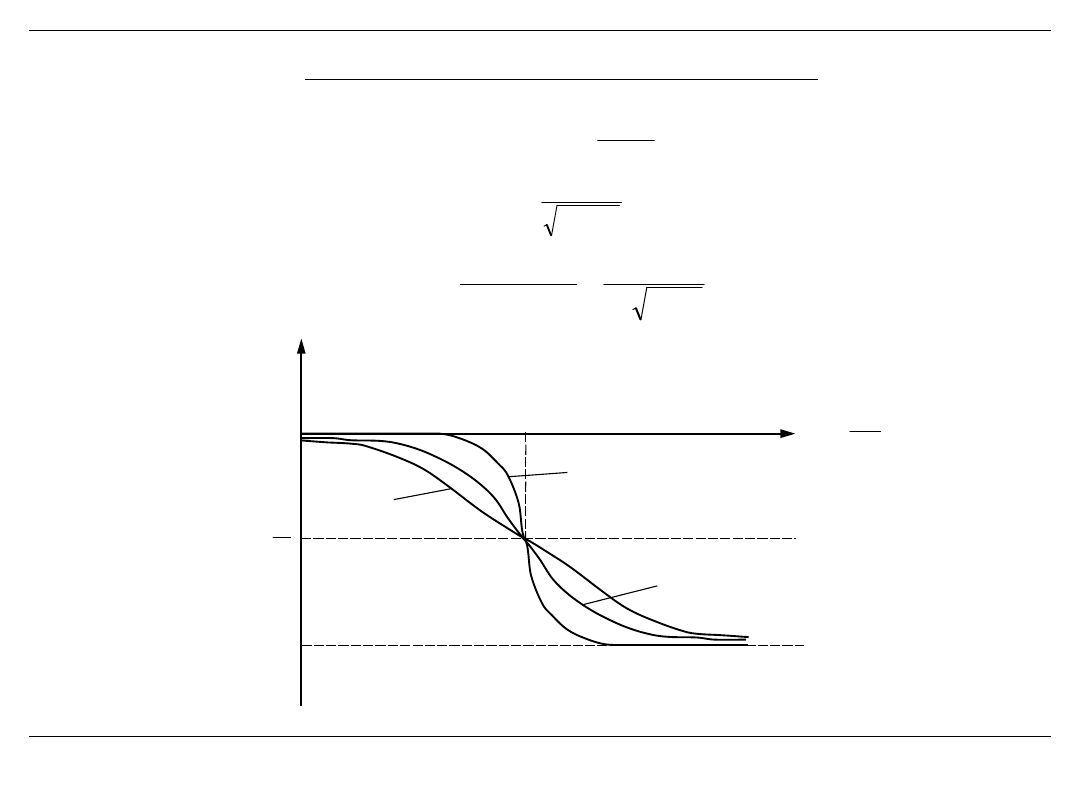
Metrologia II
98
Charakterystyka fazowo-częstotliwościowa
0
φ
-π
2
ξ
1
ξ
2
ξ
3
1
2
1
2
)
(
arctg
2
0
2
1
1
R
2
1
2
1
)|
(
|
|
)
(
|
j
G
j
G
M
R
R
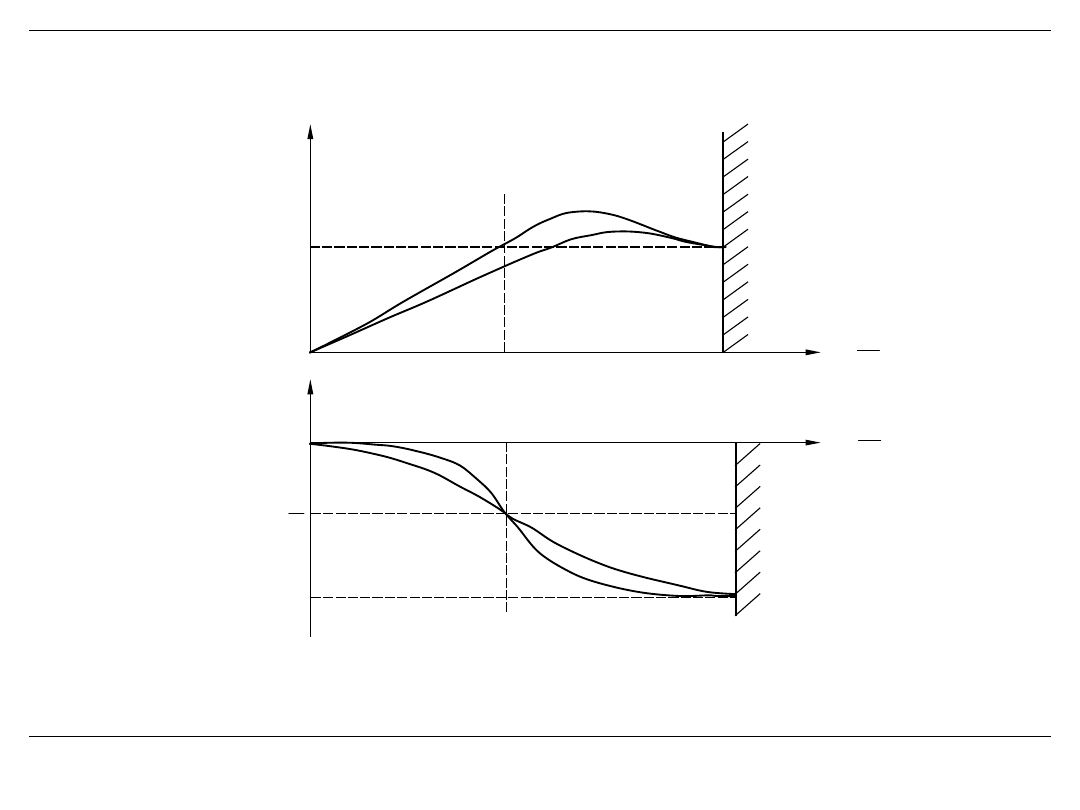
Metrologia II
99
Poprawne pomiary wibrometrem gdy
Wibrometr charakteryzuje mała wartość
ω
0
, miękka sprężyna (małe
k
s
), duża wartość
masy
m
.
5
,
0
2
,
0
)
4
3
(
0
i
1
0
|
)
(
|
j
G
0
φ
2
-π
1
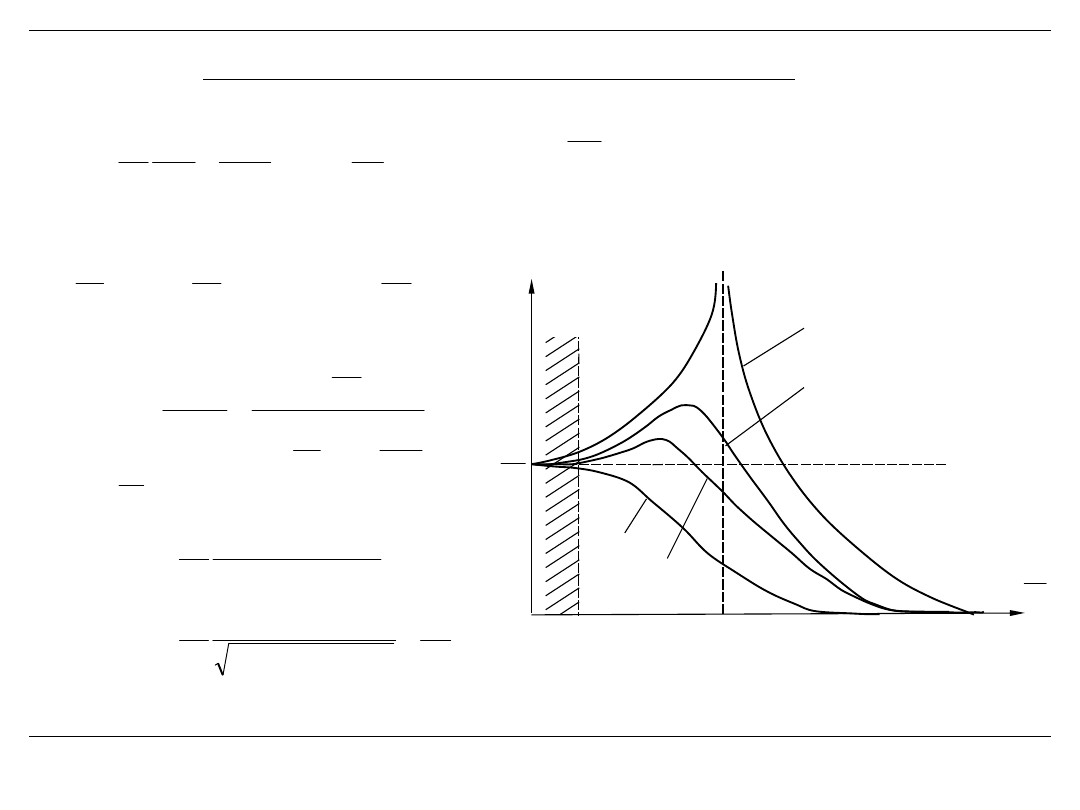
Metrologia II
100
Akcelerometr—sejsmiczny czujnik przyspieszenia
—sygnał wejściowy
y(t)
—sygnał wyjściowy
operatorowo:
Transmitancja widmowa:
2
2
)
(
dt
x
d
t
z
z
y
dt
dy
dt
y
d
2
0
0
2
2
0
1
2
1
)
(
1
)
(
)
(
2
)
(
1
2
0
0
2
0
s
Z
s
Y
s
s
Y
s
s
Y
0
2
0
2
0
2
1
1
)
(
)
(
)
(
j
j
Z
j
Y
j
G
0
2
2
2
2
2
0
)
2
(
)
1
(
2
1
1
)
(
j
j
G
m
m
Z
Y
j
G
2
2
2
2
0
)
2
(
)
1
(
1
1
|
)
(
|
4
3
2
1
0
1
2
3
4
1
0
1
|
)
(
|
j
G
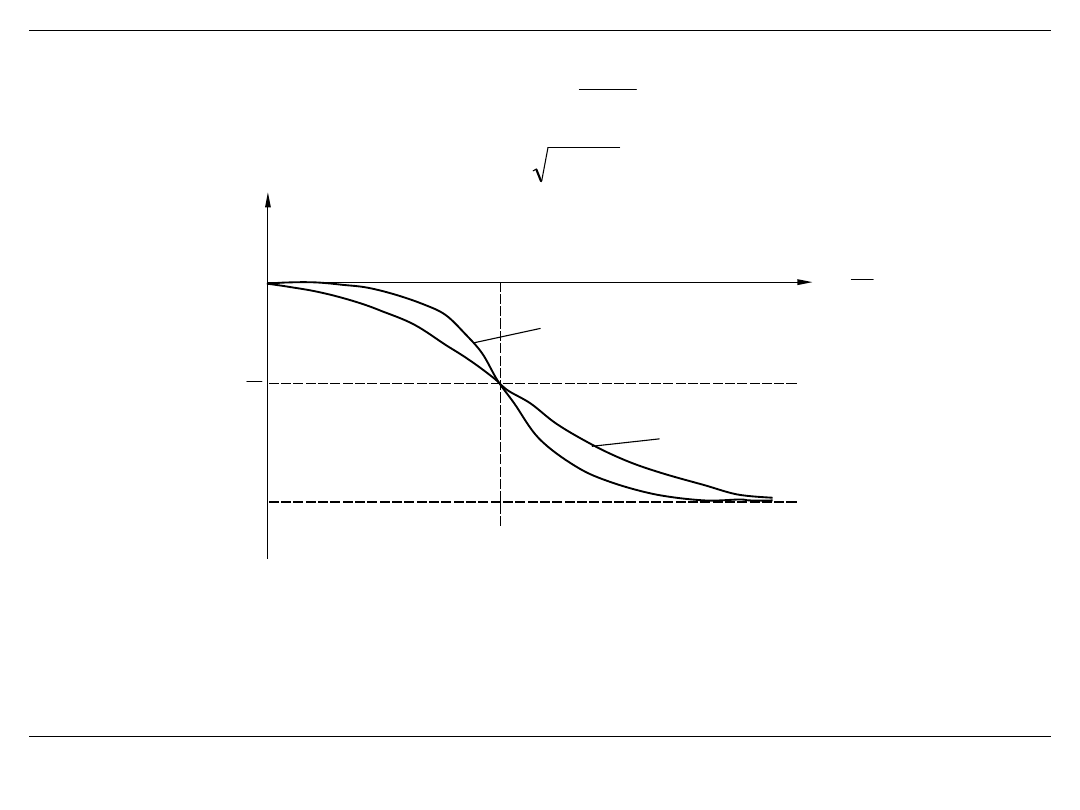
Metrologia II
101
Warunek poprawnego pomiaru
ω<<ω
0
. im mniejsze tłumienie tym węższe
pasmo częstotliwości, w którym nie następują zniekształcenia amplitudowe.
2
1
2
)
(
arctg
2
0
2
1
R
1
φ
2
-π
0
1
2
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Slide 88
- Slide 89
- Slide 90
- Slide 91
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Slide 97
- Slide 98
- Slide 99
- Slide 100
- Slide 101
Wyszukiwarka
Podobne podstrony:
Metrologia II wykład IX
Wyklad FP II dla studenta
GF w3 2.03, Geologia GZMiW UAM 2010-2013, I rok, Geologia fizyczna, Geologia fizyczna - wykłady, 01,
wykład francuz II
NTiM Wykłady semestr II WIMIM
Program wykładu Fizyka II
Metody numeryczne wykłady cz II
GF w1 16.02, Geologia GZMiW UAM 2010-2013, I rok, Geologia fizyczna, Geologia fizyczna - wykłady, 01
19 10 wykład etologia II
Rynki finansowe - wykłady (2009) - II wersja, FIR UE Katowice, SEMESTR IV, Rynki finansowe, Rynki fi
Biochemia- wyklady 1-8, Semestr II, biochemia
Ekofizjologia roslin wyklady, Studia, II rok, II rok, III semestr, Fizjologia roślin
rozpiska analityczna wykłady, farmacja, II sem, chemia ilościowa
Wyklady z matematyki II sciaga, MATMA, matematyka, Matma, Matma, Stare, I semestr
METROL1, II ElektrycznyGrupa ˙wiczeniowa 5
więcej podobnych podstron