
Mechanika Techniczna II
Ćwiczenie nr V
DRGANIA
POPRZECZNE
(GIĘTNE) PRĘTÓW
Wykonali: Anna Powalska, Marcin Kardach, Paweł Ratkowski, Piotr Seidler, Marek Rydygier, Piotr
Grzywacz, Bartosz Szwarcewicz, Piotr Redecki
Grupa 3 ETI I MU niestacjonarne

1. Cel ćwiczenia
Celem ćwiczenia jest pomiar częstości
podstawowej drgań poprzecznych (giętnych)
pręta dla różnych długości i materiałów.
Następnie porównano wyniki pomiarów częstości
drgań tłumionych; tarciem wewnętrznym i
konstrukcyjnym w miejscu zamocowania pręta
oraz oporami zewnętrznymi powietrza dla z
obliczeniami teoretycznymi.

2. Podstawy teoretyczne drgań
poprzecznych (giętnych) prętów
Rozważono pręt prosty wykonany dla różnych
długości i różnych materiałów, który utwierdzono
na
jednym
końcu
Uwzględniono
jedynie
przemieszczenia elementów pręta w kierunku
poprzecznym do osi geometrycznej pręta . Pręt
poddano początkowym sprężystym ugięciom; to
jest swobodny koniec obciążono siłą prostopadłą
do jej osi, którą nagle usunięto (przyjęto hipotezę
płaskich przekrojów).
Stosując zasadę d’Alemberta dla elementu pręta
o długości dx zapisano równanie różniczkowe:
0
2
2
t
w
g
x
T
(1)
0
T
x
M
(2)
gdzie:
w = w(x, t) - przemieszczenie liniowe dowolnego
elementu dx o długości pręta
l w kierunku poprzecznym do osi geometrycznej x, T
= T(x,t) - siła poprzeczna w kierunku pręta,
M = M(x,t) - moment tych sił względem
środka długości elementu z
pominięciem małych rzędu wyższego,
A - siła bezwładności elementu pręta o długości dx,
E - moduł Younga materiału pręta,
I - osiowy moment bezwładności przekroju
porzecznego pręta,
EI
z
- sztywność przekroju pręta na zginanie,
l - długość pręta,
t - czas,
g - przyśpieszenie ziemskie,
q - ciężar pręta przypadający na jednostkę długości
dx,
x - oś geometryczna pręta.
Po zróżniczkowaniu równania (2) względem x
i podstawieniu do (1)
otrzymano:
Dla małych ugięć pręta, równanie linii ugięcia
zapisano w następującej formie:
0
2
2
2
2
t
w
g
x
M
(3)
M
x
w
EI
z
2
2
(4)
Po dwukrotnym zróżniczkowaniu (4) EI = const i
po podstawieniu do (3) równania ruchu elementu
pręta otrzymano w następującej formie:
Równanie to zapisano następująco:
0
2
2
2
2
t
w
q
x
w
EI
z
(5)
0
4
4
2
2
2
x
w
a
t
w
(6)
gdzie:
0
2
q
EI
a
z
Po podstawieniu (6) do (7) otrzymano :
Rozwiązanie równania (6) po zastosowaniu
metody zmiennych rozdzielonych przedstawiono
w formie funkcji
w postaci iloczynu dwóch funkcji:
)
,
( t
x
w
)
(
)
(
)
,
(
t
T
t
X
t
x
w
(7)
0
4
4
2
2
2
T
dx
X
d
a
dt
T
d
X
(8)
Żeby równanie (8) było spełnione dla każdego x i
t musi zachodzić związek
const
k
dx
X
d
X
dt
T
d
T
a
4
4
4
2
2
2
1
1
(9)
Związek (9) jest równoważny układowi dwóch
sprzężonych równań różniczkowych:
0
0
4
4
4
4
2
2
2
X
k
dx
X
d
T
k
a
dt
T
d
(10
)
gdzie:
a
k
ak
,
2
(11)
Rozwiązanie ogólne pierwszego równania z
układu równań (10) przedstawiono w formie:
t
C
t
C
T
cos
sin
2
1
(12)
gdzie: C
1
, C
2
są stałymi, które można wyznaczyć
z warunków początkowych ruchu.
Rozwiązanie ogólne równania (10) zapisano
następująco:
DShkx
CChkx
kx
B
kx
A
X
sin
cos
(13)
gdzie: A, B, C, D – są stałymi, które wyznaczono z
warunków brzegowych.
Dla pręta prostego ugięcie i kąt ugięcia na końcu
utwierdzonym pręta oraz moment gnący i siła
tnąca na końcu swobodnym są równe zeru.
Warunki zapisano w następującej formie:
0
,
0
,
0
),
,
0
(
,
0
3
3
2
2
x
w
x
w
l
x
x
w
t
w
x
(14)
Po wykonaniu przekształceń algebraicznych
ostatecznie uzyskano równanie częstości w
postaci:
1
cos
klChkl
(15)
Równanie zostało rozwiązane wykreślnie, gdzie
otrzymano wzory określające częstości własne
- częstość
podstawowa
druga częstość harmoniczna
q
EJ
l
z
2
1
52
.
3
(16)
q
EJ
l
z
2
2
22
(17)

Częstością własnym (16), (17) odpowiadają
postacie drgań. Ponieważ istnieje n częstość
własnych to istnieje n rozwiązań szczególnych o
postaci (12) i (13) układu (10).
Rozwiązaniem ogólnym równania (6) zgodnie z
(7) są następujące funkcje w postaci sumy:
n
i
n
n
t
T
x
X
t
x
w
1
)
(
)
(
)
,
(
(18)

3. Opis stanowiska badawczego
Na stanowisku badawczym (rys.2) znajduje się
pręt jednostronnie zamocowany w specjalnym
uchwycie. Przy mocnym dokręceniu śrub
zaciskowych uchwytu 2 otrzymano model pręta
zamocowanego jednym końcem. Uchwyt pręta
pozwala na zmianę długości i materiałów pręta.
Do pomiaru częstości zastosowano układ złożony
z liczników cykli 3 i miernika czasu 4 [1].
Włączony układ pomiarowy wymaga zwarcia
zacisków A i B. W czasie pomiaru drgający pręt
zawiera zaciski czujnika 5. W zamykanym
okresowo obwodzie działają trzy liczniki cykli,
dzięki czemu otrzymano niezawodny pomiar
liczby cykli.
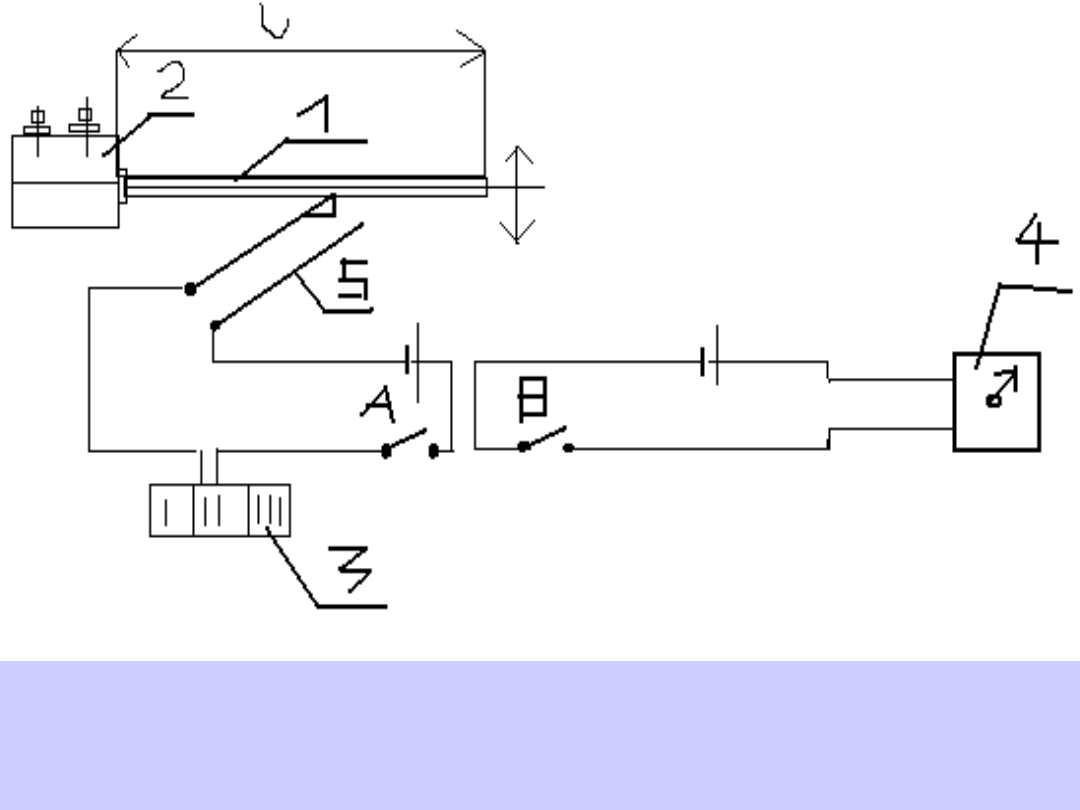
Rys. 2. Schemat układu
pomiarowego

4. Przebieg ćwiczenia
Ćwiczenie polega na wykonaniu pomiarów
podstawowej częstości drgań własnych
tłumionych wzbudzającego pręta dla różnych
długości i materiałów. Następnie obliczeniu
podstawowej częstości drgań własnych nie
tłumionych ze wzoru (16) dla tych samych
długości i modułów
Younga sporządzeniu
wykresów funkcji i , oraz ocenie
wielkości tłumienia częstości [1].
W celu pomiaru częstości drgań własnych należy
wyskalować pręt, oznaczając na nim długości
i moduły Younga podłączyć go
do źródła zasilania mierników cykli i miernika
czasu.
}
,
,
{
2
1
n
l
l
l
l
}
,
,
{
2
1
n
E
E
E
E
t
)
(l
f
s
}
,
,
{
2
1
n
E
E
E
E
}
,
,
{
2
1
n
l
l
l
l
Dane liczbowe:
}
,
{
h
b
F
}
,
,
{
2
1
n
l
l
l
l
}
,
,
{
2
1
n
E
E
E
E
12
3
bh
I
z
Po przygotowaniu stanowiska należy zamocować
kolejno pręt o różnych długościach
w uchwycie stanowiska i mierzyć dla każdej
długości pręta kilkakrotnie liczbę cykli ruchu w
przeciągu kilku do kilkunastu sekund.
Uzyskane wyniki pomiarów należy zapisać w
tablicy nr. 1
}
,
,
{
2
1
n
l
l
l
l
Tablica 1
n
]
1
[
s
t
n
f
1
l
2
l
liczba
cykli
czas pomiaru
częstotliwość
liczba
cykli
wskazana
przez
licznik
długość
belki
]
[s
t
Częstość obliczeniową wykonano w oparciu o
wskazanie w tablicy nr. 2
Tablica 2
długość belki
q
EI
l
s
f
z
s
t
2
52
.
3
]
1
[
2
%
100
s
t
s
2
l
różnica
częstość podstawowa
1
l
Po przygotowaniu stanowiska należy zamocować
kolejno pręt o różnych modułach Younga
w uchwycie stanowiska i mierzyć dla każdego
modułu Younga pręta kilkakrotnie liczbę cykli
ruchu w przeciągu kilku do kilkunastu sekund.
}
,
,
{
2
1
n
E
E
E
E
Uzyskane wyniki pomiarów należy zapisać w
tablicy nr. 3
Tablica 3
liczba cykli
wskazana
przez licznik
moduł
Younga
belki
n
]
[s
t
]
1
[
s
t
n
f
1
E
2
E
liczba cykli
czas pomiaru
częstotliwość
moduł
Younga belki
q
EI
l
s
f
z
s
t
2
52
.
3
]
1
[
2
%
100
s
t
s
2
E
częstość podstawowa
różnica
1
E
Tablica 4
Obliczona różnica w ostatniej kolumnie tablicach
2, 4 zawiera w sobie efekt tłumienia i błędy
pomiarowe.
Błędy
pomiarowe
wynikające
głównie z niedokładności odmierzania długości
czynnej pręta oraz z pomiaru
czasu , który odpowiada liczbie cykli są
błędnymi
przypadkowymi.
Można
błędy
wyeliminować z określonej różnicy wyliczając
wartość średnią.
i
l
l
l
l
,
,
2
1
n
n
i
i
sr
1
(19)
Średnia wartość z przybliżeniem określa wartość
tłumienia częstości drgań spowodowanej
oporami zewnętrznymi ruchu, tarciem
wewnętrznym i tarciem konstrukcyjnym w
miejscu zamocowania pręta.
5. Treść sprawozdania
a)opis stanowiska z rysunkiem
b)wzory obliczone z wyjaśnieniem
c)tabelki z wynikami pomiarów i obliczeń
d)wykresy funkcji i ;
e)obliczenie przybliżonej wartości tłumienia
częstości
)
(l
f
s
)
(E
f
s
t
%
100
s
t
s
(20
)
f) dyskusje wyników

LITERATURA
1. Praca zbiorowa: Wernerowski K., Siołkowski B., Holka
H.: Laboratorium z kinematyki i dynamiki, WSI,
Bydgoszcz 1973.
2. Jakowluk A.: Mechanika techniczna i ośrodków
ciągłych, Ćwiczenia laboratoryjne, PWN, Warszawa
1977.
3. Osiński Z.: Teoria drgań, PWN, Warszawa 1978.
4. Wernerowski K., Topoliński A.: Zbiór zadań z
kinematyki, dynamiki i drgań, Wydawnictwo
Uczelniane ATR, Bydgoszcz 1984.
5. Botwin M.: Mechanika i wytrzymałość materiałów.
PWN, Warszawa.
6. Bukowski J.: Mechanika płynów. PWN, Warszawa.
7. Jakubowicz A., Orłoś Z.: Wyrzymałość materiałów.
WNT, Warszawa.
8. Misiak J.: Mechanika techniczna, t. 1; Statyka i
wytrzymałość materiałów. WNT, Warszawa.
9. Siuta W.: Mechanika techniczna. WSiP, Warszawa.
10.Zielnica J.: Wytrzymałość materiałów. Wyd.
Politechniki Poznańskiej.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
Wyszukiwarka
Podobne podstrony:
Lab 7, Drgania Poprzeczne Struny
Lab 7 Drgania Poprzeczne Struny
labor5, inne (budownictwo), T E O R I A S P R E Ż Y S T O Ś C I, XIV.Zagadnienia dynamiczne teorii
Drgania poprzeczne (spr)
drgania giętne?lek
19 (drgania pretow pryzmatycznych)
drgania gietne belki wspornikowej, Studia, Dynamika maszyn
Drgania ukl o ciaglym rozkladzie masy drgania gietne belek v2011
19 (drgania pretow pryzmatycznych)
20 (drgania pretow pryzmatycznych cd)
4 Linie wpływu wielkości statycznych w ustrojach prętowych
Środki zwiotczające mięśnie poprzecznie prążkowane
Diagnostyka laboratoryjna chorób serca i mięśni poprzecz (2)
POWIKŁANIA POPRZETOCZENIOWE
Hałas i drgania mechaniczne
porod w polozeniu poprzecznym
3 Stateczność prętów prostych, Postaci utraty stateczności, określanie siły krytycznej ppt
więcej podobnych podstron