
Modele i obliczenia
mechanizmów wciągarki
Dr inż. Piotr Kisiel
Zasada Hamiltona
Dla układu zachowawczego wymaga ona, aby
całka
miała wartość ekstremalną. Funkcja
podcałkowa L reprezentuje nadwyżkę energii
kinetycznej nad potencjalną tj.
L = Ak − Ap
gdzie:
L – funkcja Lagrange’a
Ak –energia kinetyczna
Ap - energia potencjalna

Równania ruchu dla układów zachowawczych
bez strat i wymuszeń zewnętrznych
Po obliczeniu wariacji całki względem kolejnych zmiennych
(współrzędnych
uogólnionych)
otrzymuje
się
równania
Lagrange’a drugiego rodzaju; dla układów zachowawczych, bez
strat i bez wymuszenia zewnętrznego:
dla j = 1,..., k
gdzie:
q j –współrzędne uogólnione
k – liczba stopni swobody

Równania ruchu dla układów nie zachowawczych
(rzeczywistych) ze stratami i wymuszeniami
zewnętrznymi
gdzie:
- funkcja strat
- funkcja wymuszenia

Stabilność oraz stany nieustalone
Stabilnością układu nazywamy jego skłonność powracania do
warunków równowagi statycznej, gdy został z nich wytrącony.
Zmiana wartości obciążenia lub siły elektromotorycznej silnika
powoduje zakłócenie równowagi ruchu napędu: zmianę
momentu dynamicznego oraz prędkości ruchu. Zakłócenia
równowagi ruchu napędu nazywamy stanem nieustalonym,
który trwa aż do osiągnięcia nowej stałej prędkości ruchu układu
napędowego.
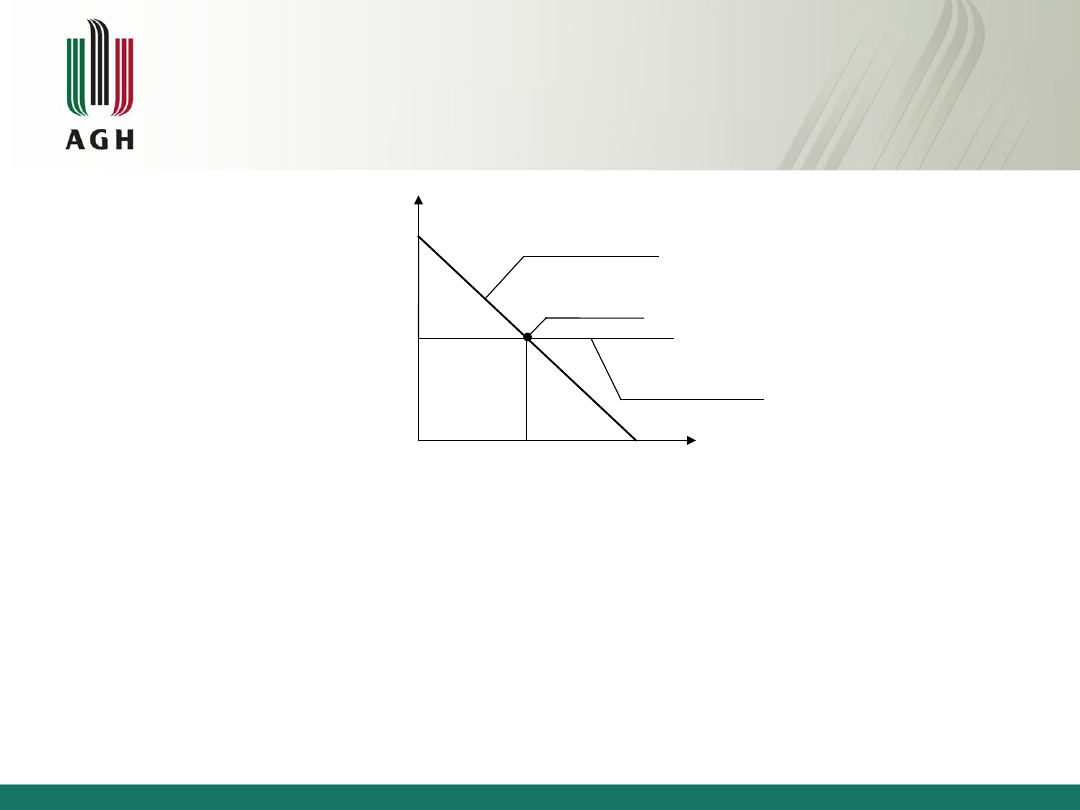
Układ napędowy znajduje się w stanie równowagi gdy
Md = 0 tj. przy Ms (ω) = Mobc (ω). Stan równowagi dynamicznej
jest punktem pracy układu napędowego: jest to punkt przecięcia
się charakterystyki silnika z charakterystyką obciążenia.
Stabilność oraz stany nieustalone
Rys.1. Punkt pracy układu napędowego
M
M
obc
ω
p
ω
Punkt pracy
Charakterystyka
momentu silnika
M
s
Charakterystyka
momentu
obciążenia

Moment dynamiczny
Moment dynamiczny jest różnicą pomiędzy momentem silnika
(wymuszeniem zewnętrznym) a momentem oporu (obciążeniem).

Więzy sprężyste
Więzy sprężyste charakteryzuje współczynnik sztywności k
określany jako wartość siły potrzebnej dla jednostkowego
przesunięcia jednego końca więzów względem drugiego. Dla
przesunięcia prostoliniowego wartość tego współczynnika można
wyznaczyć wg wzoru :
gdzie:
F – siła rozciągająca więzy [N],
∆l – wydłużenie liniowe [m],
E – moduł sprężystości Younga [N / m2],
Q – przekrój poprzeczny [m2],
l – długość więzi [m].

Więzy sprężyste
Dla przesunięcia obrotowego współczynnik sztywności jest równy:
gdzie:
M – moment skręcający więzy [Nm],
∆α – skręcenie więzi [rad],
G – moduł sprężystości poprzecznej [N / m2],
d – średnica więzi [m].
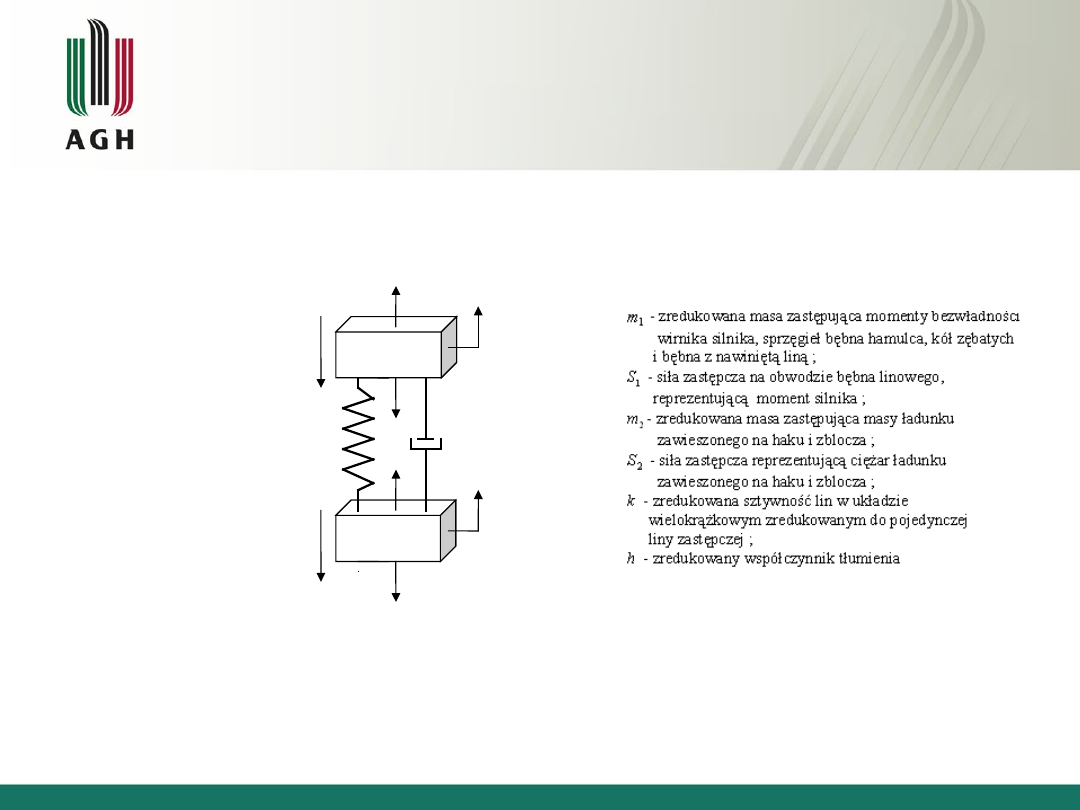
Mechanizm podnoszenia
Model matematyczny (dwumasowy)
m
1
m
2
2
w
s
1
1
x
m
1
w
s
2
w
s
2
S
2
x
1
x
1
S
h
k
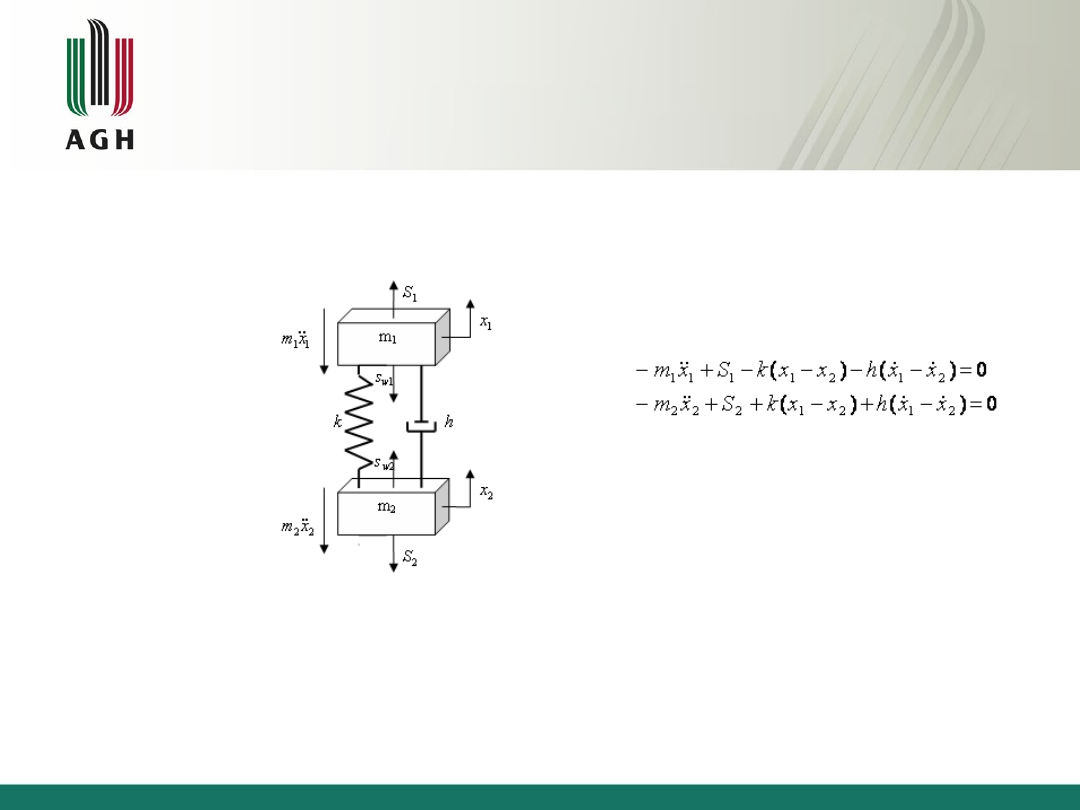
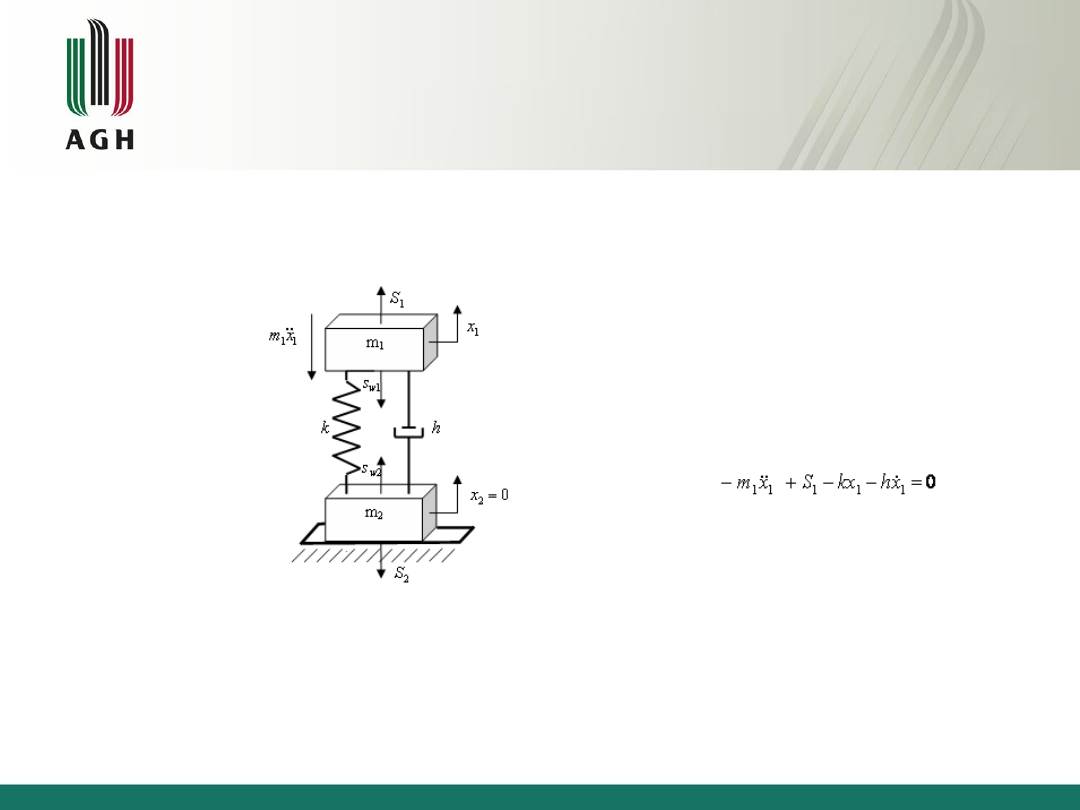
Równania ruchu
Rozruch – przypadek z napiętymi więzami
Równania ruchu przyjmują
postać:
Równania ruchu
Rozruch – przypadek ze zluzowanymi więzami
Ładunek spoczywający na podłożu,
lina nie jest napięta. Ruch takiego
układu rozpoczyna się od fazy
napinania więzów, tj. początkowo
porusza się tylko masa m1, co
powoduje
stopniowe
rozciąganie
więzów. Faza ta trwa do chwili, w
której
siła
odkształcająca
więzy
osiągnie wartość równą sile S2 .
Układ ma tylko jeden stopień
swobody, a więc ruch układu opisuje
jedno równanie drugiego rzędu.
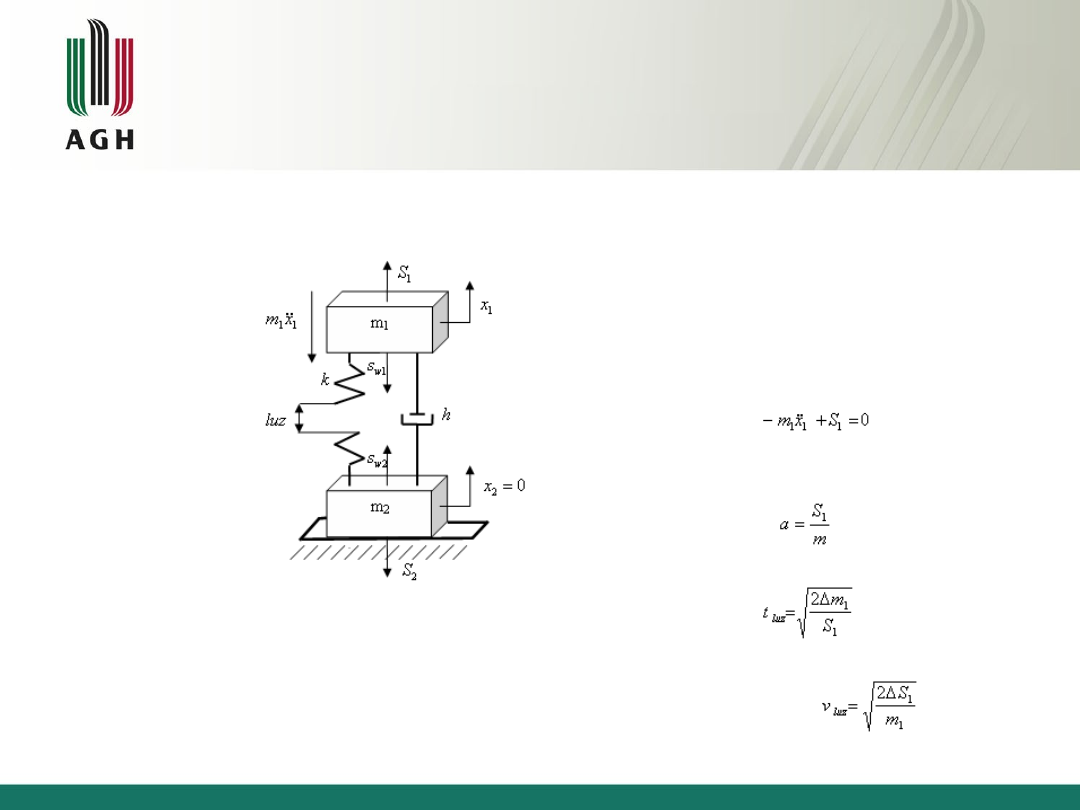
Równania ruchu
Rozruch – przypadek z nadmiernym luzem
Ładunek spoczywa na podłożu, lecz tym
razem liny są bardziej luźne. Ruch takiego
układu rozpoczyna się od fazy kasowania
luzu w więzach – porusza się tylko masa
m1 pociągając za sobą linę bez oporu, a
masa m2 spoczywa swobodnie na
podłożu.
W równaniu nie występują zewnętrzne ani
wewnętrzne siły oporu.
Ruch jest jednostajnie przyspieszony i trwa do
chwili wyczerpania luzu:
Czas kasowania luzów wyraża się wzorem:
Prędkość masy m1 w chwili skasowania luzu
jest równa:
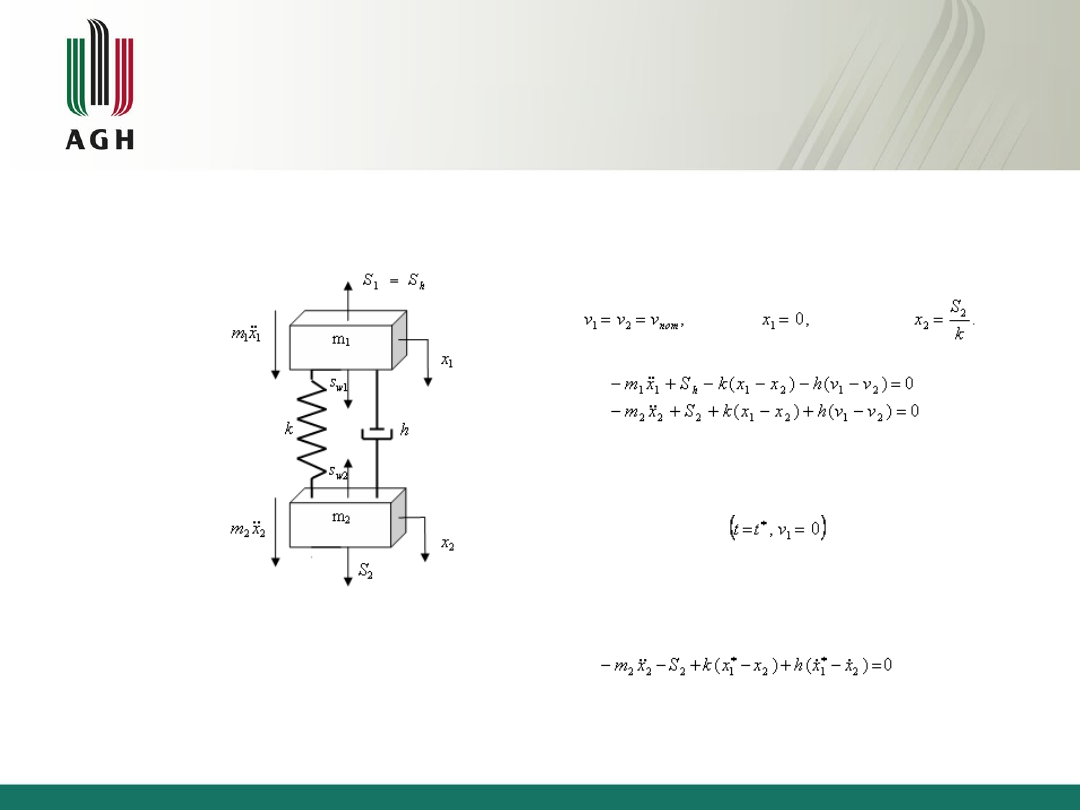
Równania ruchu
Hamowanie przy opuszczaniu
Warunki początkowe określone są przez
prędkość ruchu przy opuszczaniu oraz
wydłużenie układu linowego pod wpływem
zawieszonego ciężaru:
Ruch opisują dwa równania różniczkowe:
Ruch tego układu składa się z dwóch faz:
− ruch obu mas – trwa do zatrzymania masy m1
siłą hamulca
− po zatrzymaniu masy m1 następuje faza,
w której masa m2 wykonuje swobodne
wahania pionowe opisane równaniem:
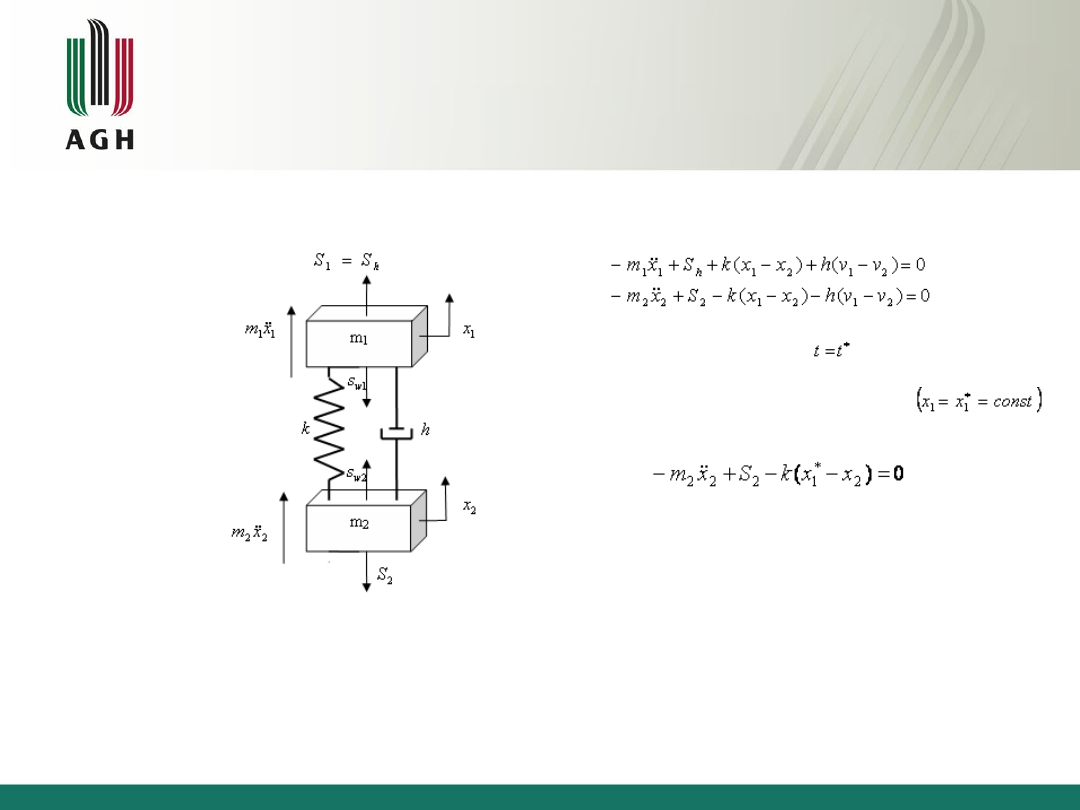
Równania ruchu
Hamowanie przy podnoszeniu
Równania ruchu w fazie pierwszej – ruch obu mas:
Faza ta trwa aż do chwili
w której nastąpi
zatrzymanie pierwszej masy m1,v=0. Druga
faza po zatrzymaniu masy m1 to ruch
wahadłowy drugiej masy m2
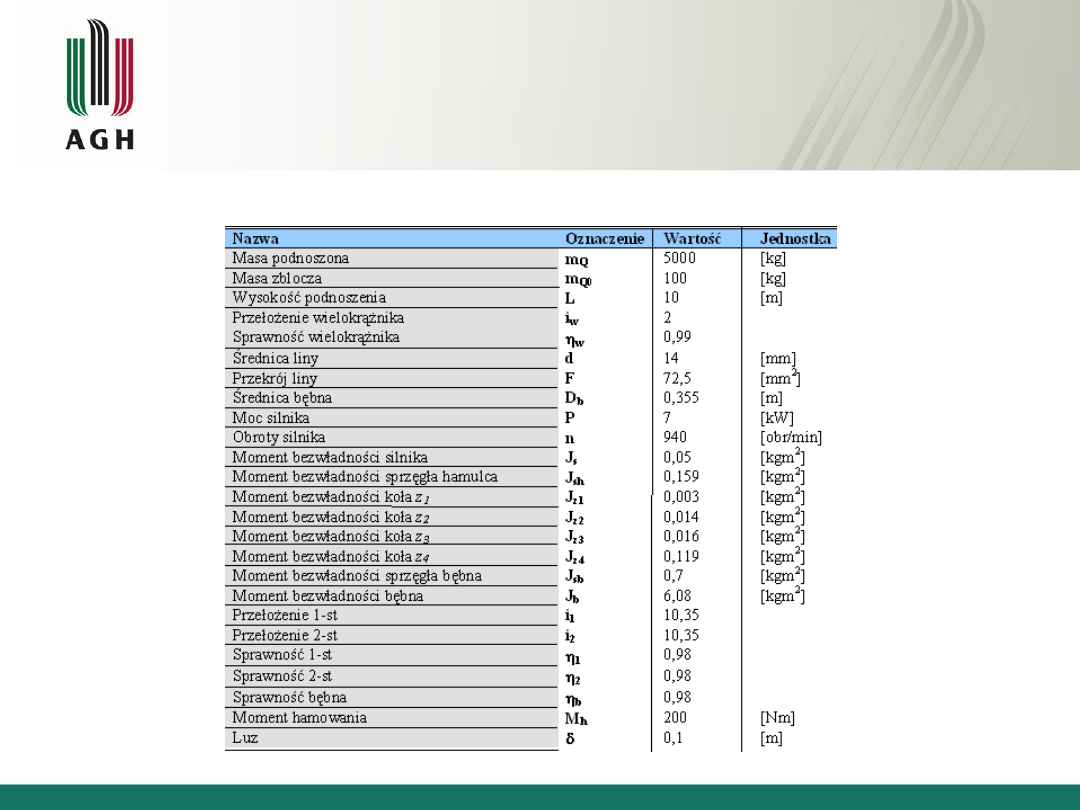
Obliczenie parametrów występujących
w równaniach ruchu
Tabela danych obliczeniowych mechanizmu podnoszenia

Obliczenie parametrów występujących
w równaniach ruchu
Obliczenie masy zredukowanej − m1
obliczenie momentu zredukowanego Jzr1 dla masy m1
zatem:
2
1
1
4
b
zr
D
J
m

Obliczenie parametrów występujących
w równaniach ruchu
Obliczenie masy zredukowanej − m2
obliczenie momentu zredukowane Jzr2 dla masy m2
gdzie
zatem

Obliczenie parametrów występujących
w równaniach ruchu
Obliczenie siły wymuszającej S1R dla rozruchu
obliczenie M*silnika
zatem

Obliczenie parametrów występujących
w równaniach ruchu
Obliczenie siły wymuszającej SR2 dla rozruchu
Obliczenie siły wymuszającej S1H dla hamowania
Obliczenie siły wymuszającej S2H dla hamowania

Obliczenie parametrów występujących
w równaniach ruchu
Obliczenie współczynnika sprężystości liny
k
Obliczenie współczynnika tłumienia
h

Obliczenie parametrów występujących
w równaniach ruchu
Równania ruchu układu
- podczas rozruchu
- podczas hamowania

Tyle tej powtórki
Zapraszam do udziału w laboratorium
z modelowania dynamiki wciągarki
przejezdnej !
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
Wyszukiwarka
Podobne podstrony:
Modele i obliczenia mechanizmów wciągarki, AGH WIMIR Mechanika i Budowa Maszyn, Rok III, II semestr,
LKM 4 modele obliczeniowe
Zadanie 08 Turkstra, Niezawodność konstr, niezawodność, Niezawodność konstrukcji, 3-Normy projektowe
Zadanie 09 kalibracja, Niezawodność konstr, niezawodność, Niezawodność konstrukcji, 3-Normy projekto
Obliczenia 1, mechanika, BIEM- POMOCE, pkm
17. Modele obliczeniowe konstrukcji obiektĂłw budowlanych, egzamin inz
Metody Obliczeniowe w Mechanice Konstrukcji tematycznie
Obliczenia mechanizm krzywkowy
Obliczanie mechanizmu korbowego
39 KP Modele obliczeniowe konstrukcji obiektów budowlanych
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
AOL2, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do obliczeń
A4, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, PODSTAWY KON, Program do obliczeń P
obliczenia7, inżynieria ochrony środowiska kalisz, Rok 1 IOS, Mechanika budowli, Mechanika budowli -
więcej podobnych podstron