
Silniki liniowe Servotube
firmy Dunkermotoren
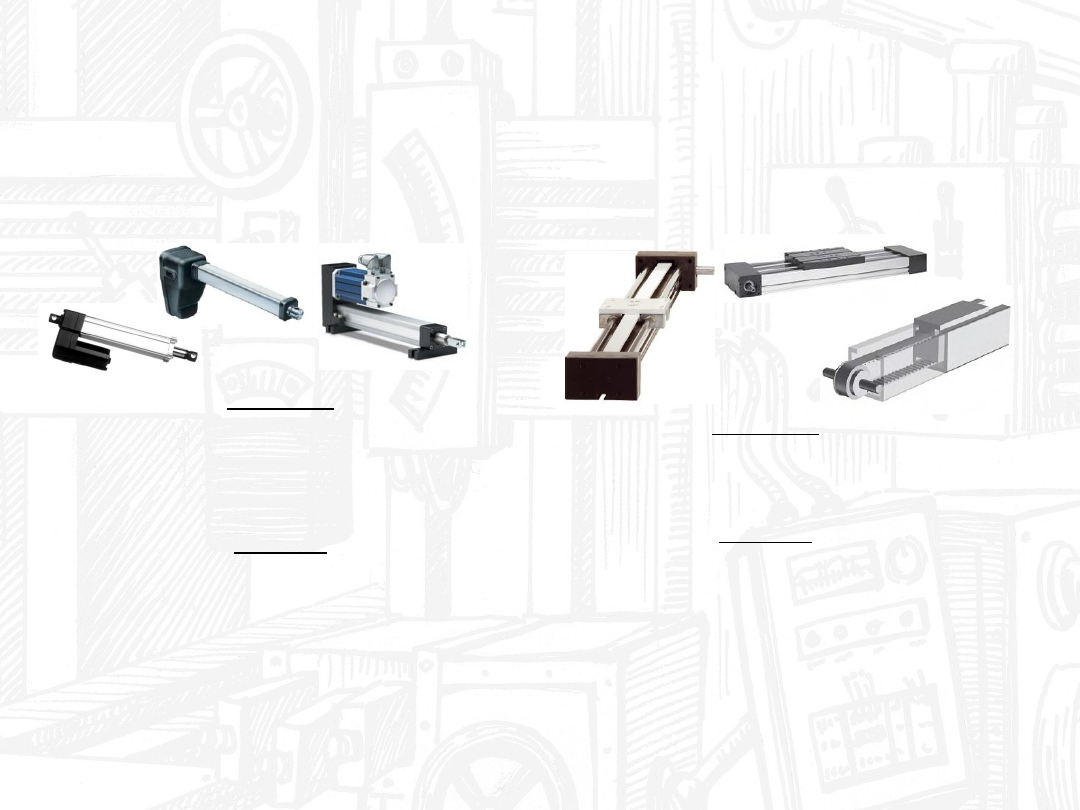
Silniki liniowe Servotube
Wersja do pracy siłownikowej
Wersja do pracy silnikowej
Wersja do pracy
siłownikowej z
dodatkowymi
prowadnicami
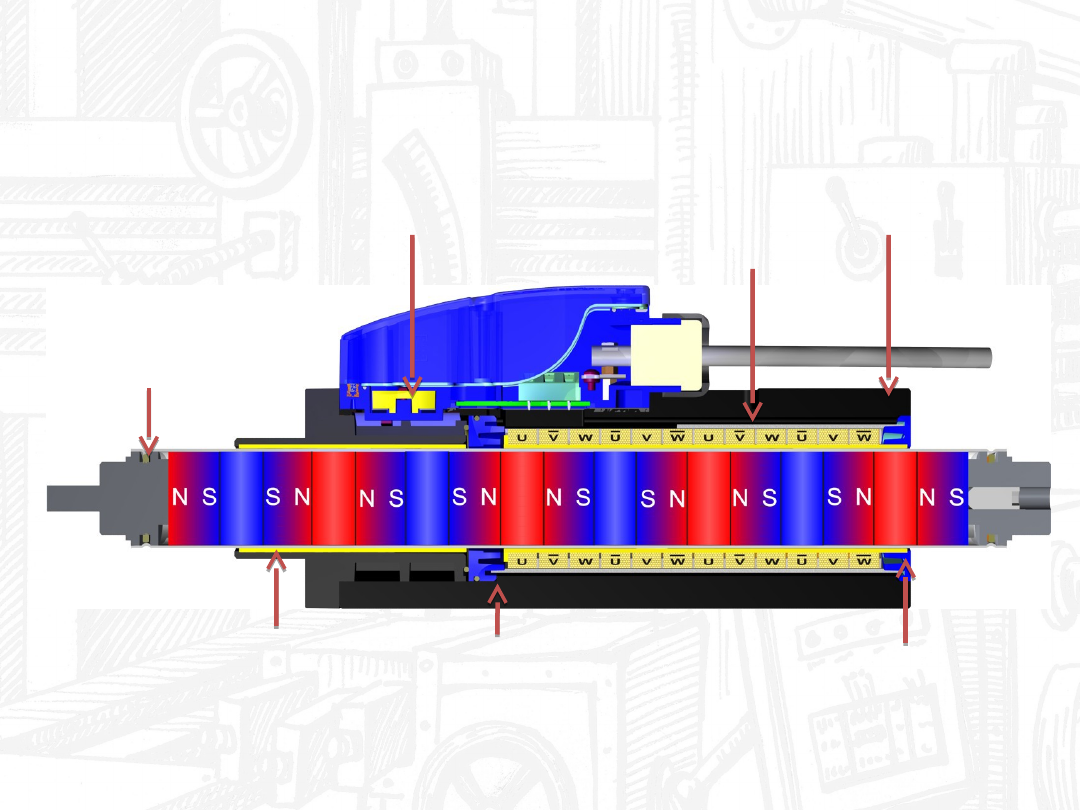
Silnik liniowy Servotube -
budowa
Wbudowany czujnik położenia
Nie wymagany zewnętrzny enkoder
Standardowy sygnał wyjściowy sin/cos (analog
enkoder)
3 dostępne rozmiary
silnika
Średnica wałka magnetycznego
określa max. siłę silnika.
Dostępne 11, 25 i 38mm
Wbudowane łożyska
liniowe z tworzywa
IGUS
Duża żywotność, cicha praca,
bezpieczne
Złącza „T”
Montaż obciążenia
bezpośrednio
do obudowy forcera
Standardowe
mocowanie
Łatwość montażu
Standardowe akcesoria
montażowe
Wbudowany
radiator
Konstrukcja nie wymaga
dodatkowego chłodzenia
Obudowa IP67 lub
IP69K
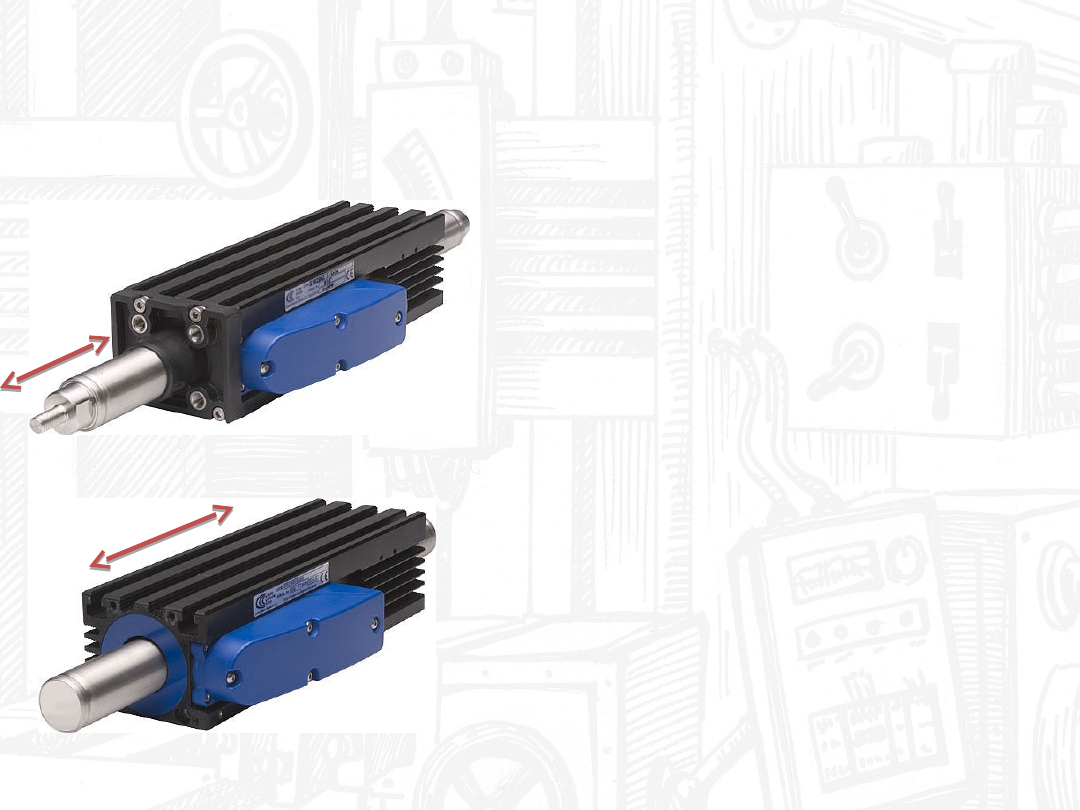
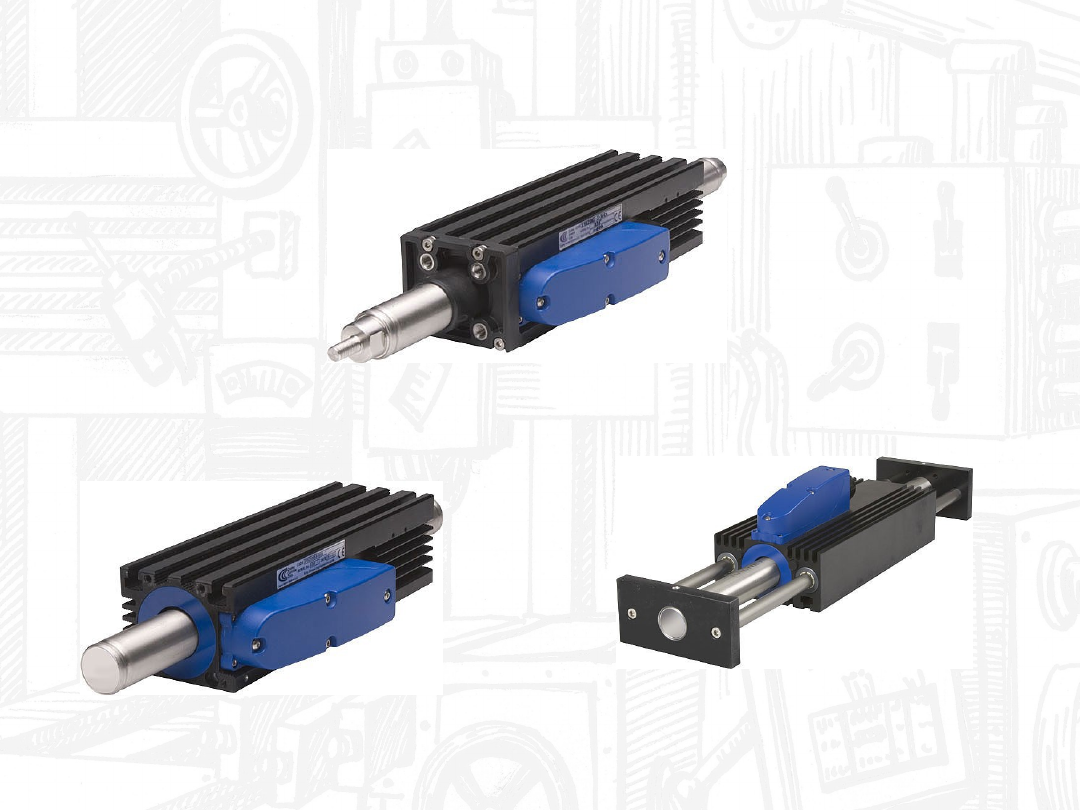
Silniki liniowe Servotube – tryby
pracy
Siłownik STA
Opcja z poruszającym się wałkiem
Idealny do aplikacji „push-pull-lift”
Duża żywotność, bezobsługowe
łożysko
Zamiennik siłowników
pneumatycznych wg DIN -
standardowe akcesoria
Opcjonalny hamulec
Silnik STB
Opcja z poruszającym się forcerem
Idealny do aplikacji „pick-and-place”
Montaż obciążenia bezpośrednio do
forcera
Osadzony na pojedynczej
prowadnicy liniowej
Wałek podparty na końcach

Silnik liniowy Servotube
- hamulec
Do aktuatora o średnicy wałka
25mm
Używany w pionowych osiach
Zasilanie 24VDC @ 125 mA
Siła trzymająca 200N
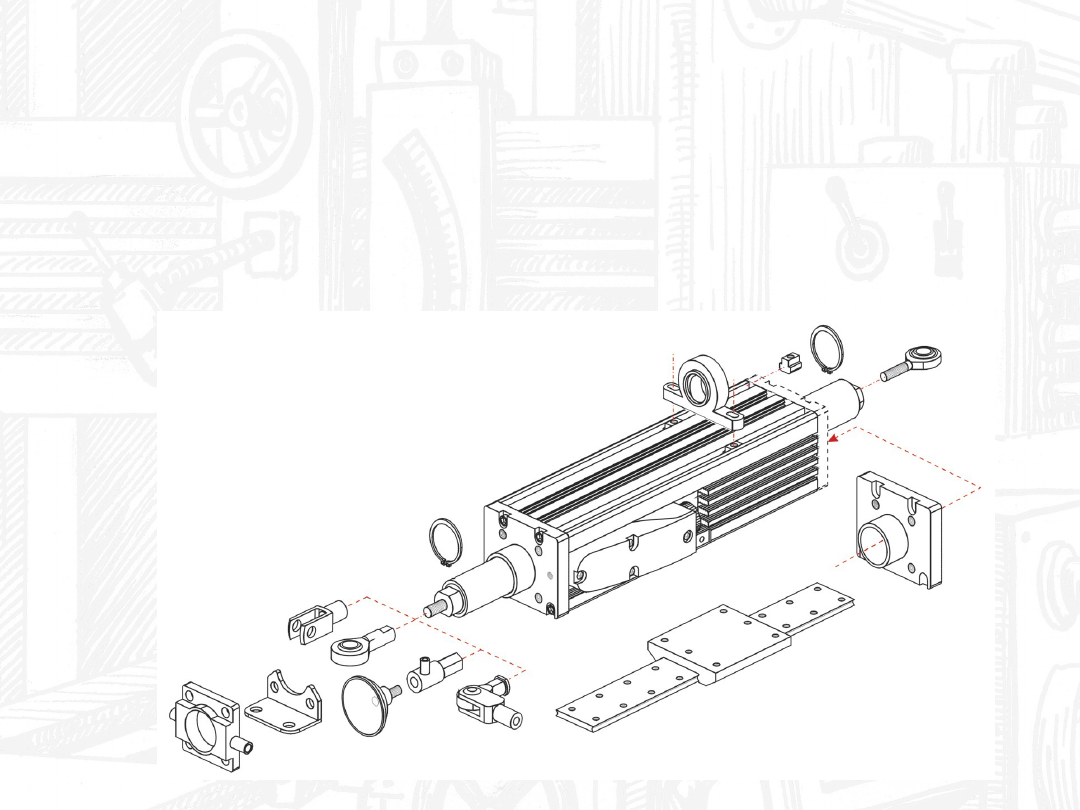
Silnik liniowy Servotube –
akcesoria montażowe
Końcówki wałka aktuatora kompatybilne z
DIN/ISO 6431, standardowe akcesoria montażowe
Festo, Igus itd.
Szyny prowadzące i podpory wałków jako
niezbędne akcesoria do silników
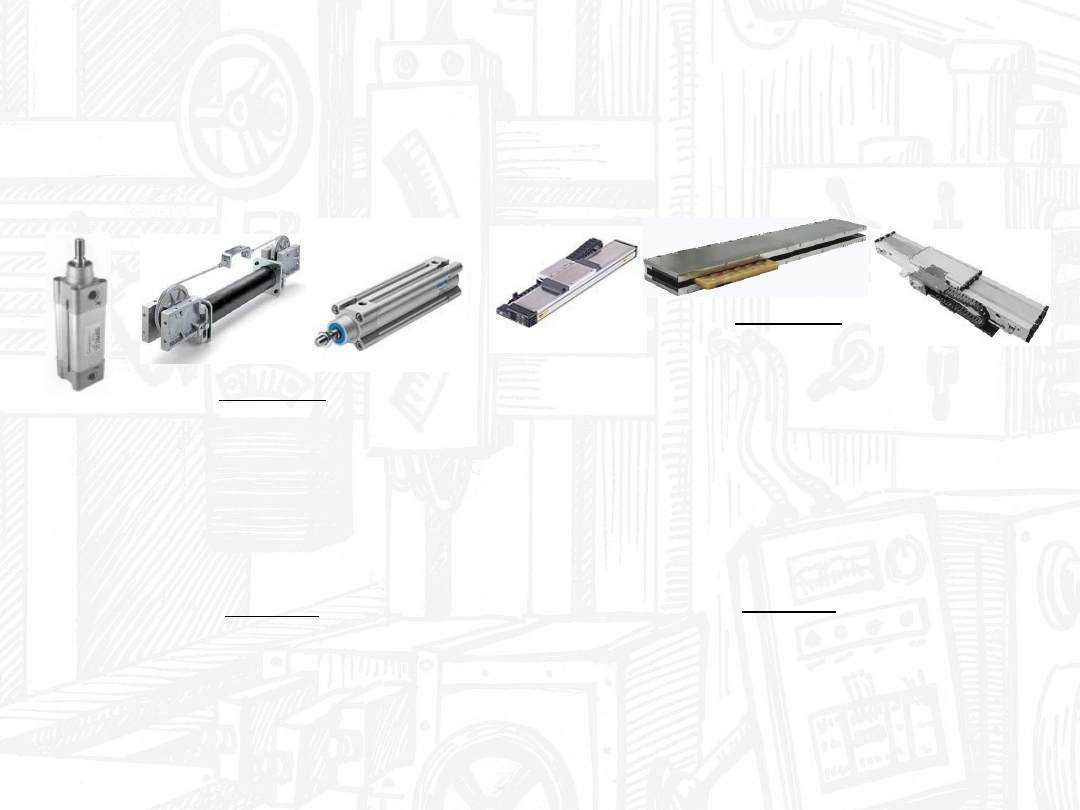
Silnik liniowy Servotube – porównanie
z innymi rodzajami napędów liniowych
Siłowniki z napędem śrubowym
Zalety
Duża siła
Duża sztywność
Szeroka dostępność
Wady
Możliwe luzy
Relatywnie wolne
Potencjalnie głośne
Żywotność około 10-
krotnie mniejsza
Wymagają smarowania i
serwisu
Zalety
Niski koszt zakupu
Duża prędkość i przyspieszenie
Wady
Hałas
Brak sztywności – pasek jest
elastyczny
Utrata dokładności
spowodowana rozciąganiem
paska
Wymagają wymiany pasków
Siłowniki z napędem paskowym
Silnik liniowy Servotube – porównanie
z innymi rodzajami napędów liniowych
Siłowniki
pneumatyczne
Zalety
Duża moc w stosunku do
wymiarów
Niski koszt zakupu
Powszechnie dostępne i
popularne
Wady
Hałas
Wysoki koszt instalacji
zasilającej
Brak kontroli pozycji i
prędkości
Zalety
Bardzo duże prędkości i
przyspieszenia
Brak luzu
Stałe parametry w skali czasu
Możliwość montażu kilku
niezależnych forcerów na jednej
osi
Wady
Trudne do zaimplementowania w
istniejących rozwiązaniach
Wysoki koszt zakupu
Skomplikowane konstrukcyjnie
Praca w środowisku bez
zanieczyszczeń
Wymagają zewnętrznego
oprzyrządowania
Klasyczne silniki liniowe

Silniki liniowe Servotube
– zalety rozwiązania
W czasie pracy możliwy jest ruch obrotowy wałka
Wbudowany czujnik pozycji – nie wymagany
zewnętrzny enkoder.
Standardowe wyjście sygnałowe 1V pk-pk sin/cos
Łatwa integracja (Plug and Play) ze wzmacniaczami
Copley, np.Xenus
Poziom ochrony IP67 lub IP69K (wersja ze stali
nierdzewnej)
Bezobsługowość, brak ruchomych części
Obudowa w kształcie radiatora – efektywnie oddawane
ciepło umożliwia osiąganie większych prędkości i
większej ilości cykli
Standardowe akcesoria montażowe – prowadnice,
podpory
Łatwy montaż i migracja systemu z pneumatyki –
standardowe akcesoria z siłowników pneumatycznych,
złącza „T”
Szczelina między wałkiem a forcerem pozwala na
większą tolerancję równoległości podczas montażu
Obudowa silnika i powierzchnia montażowa w jednym
bloku
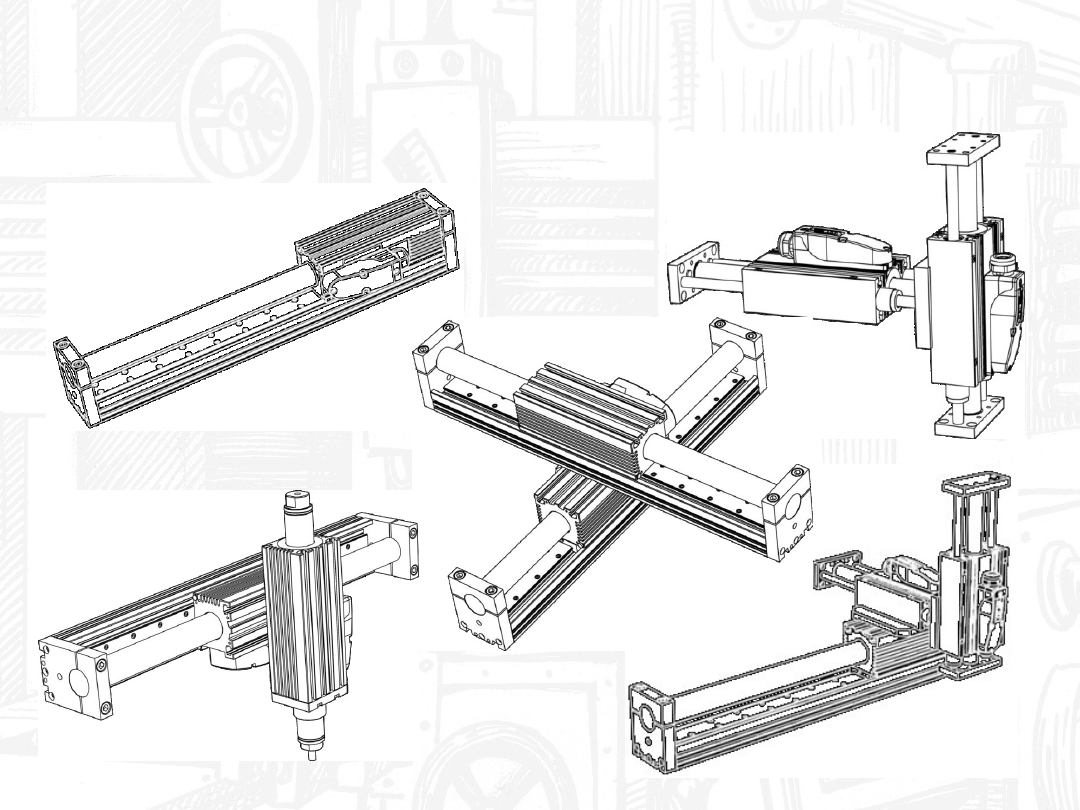
Silniki liniowe Servotube
– przykłady zastosowań
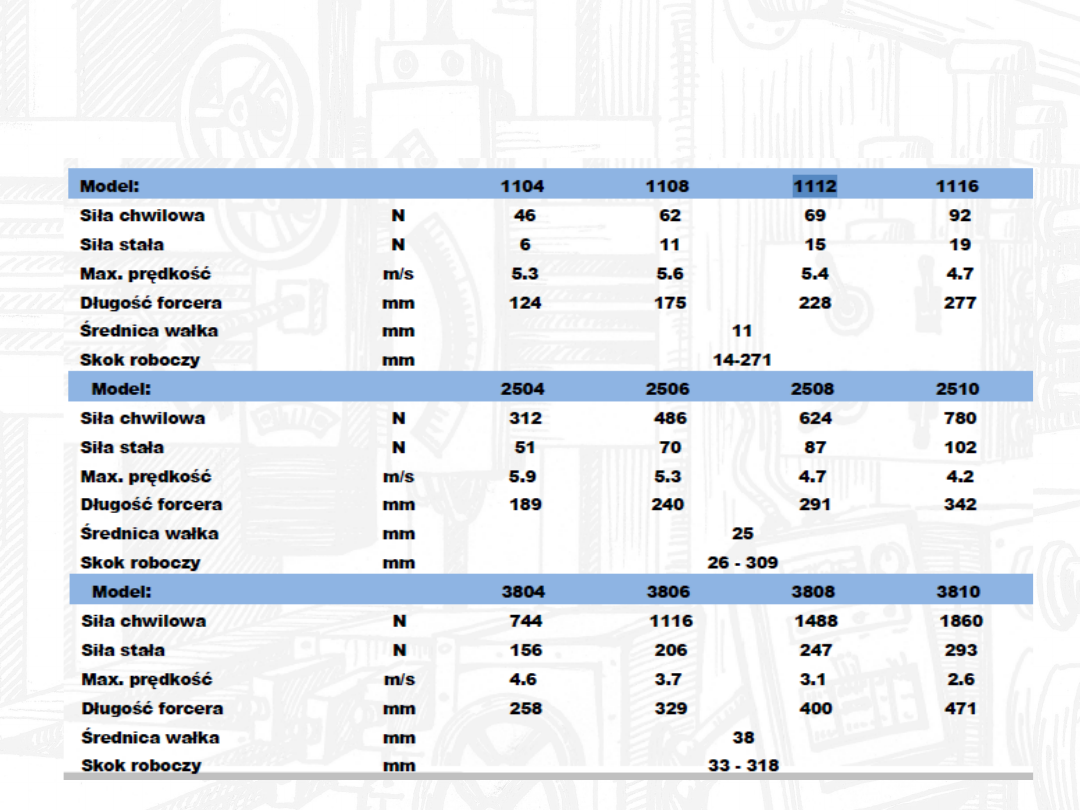
Silniki liniowe Servotube
– dane techniczne – seria STA
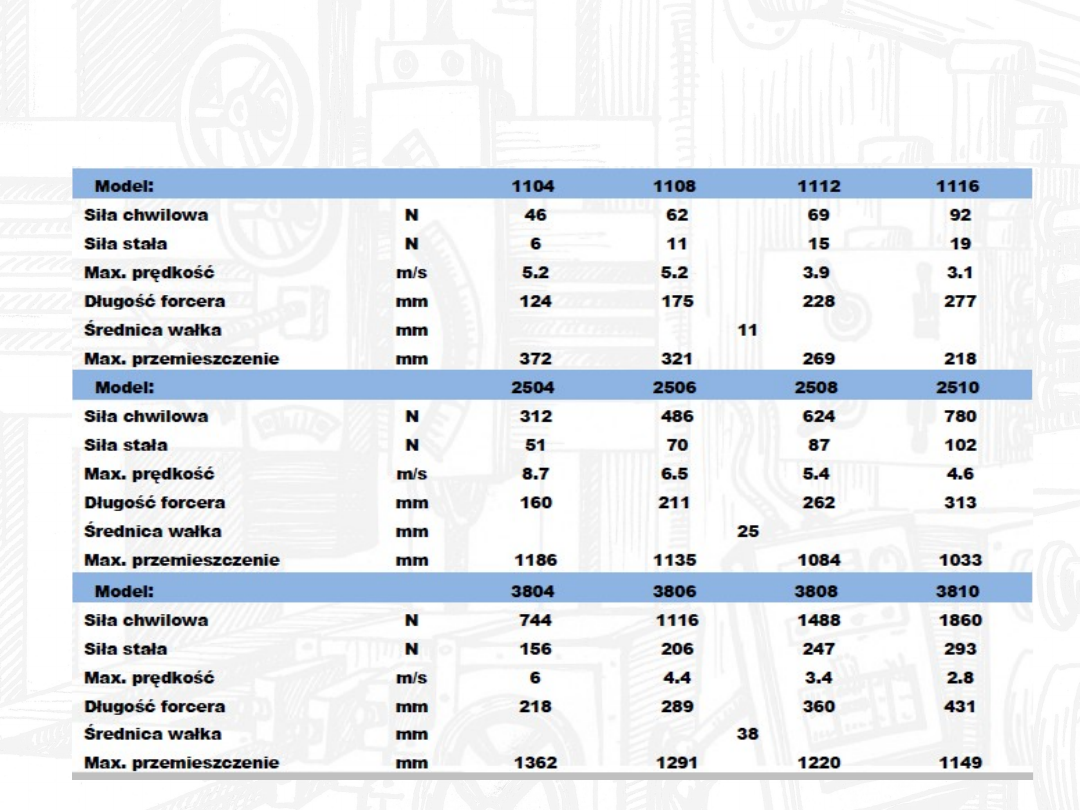
Silniki liniowe Servotube
– dane techniczne – seria STB
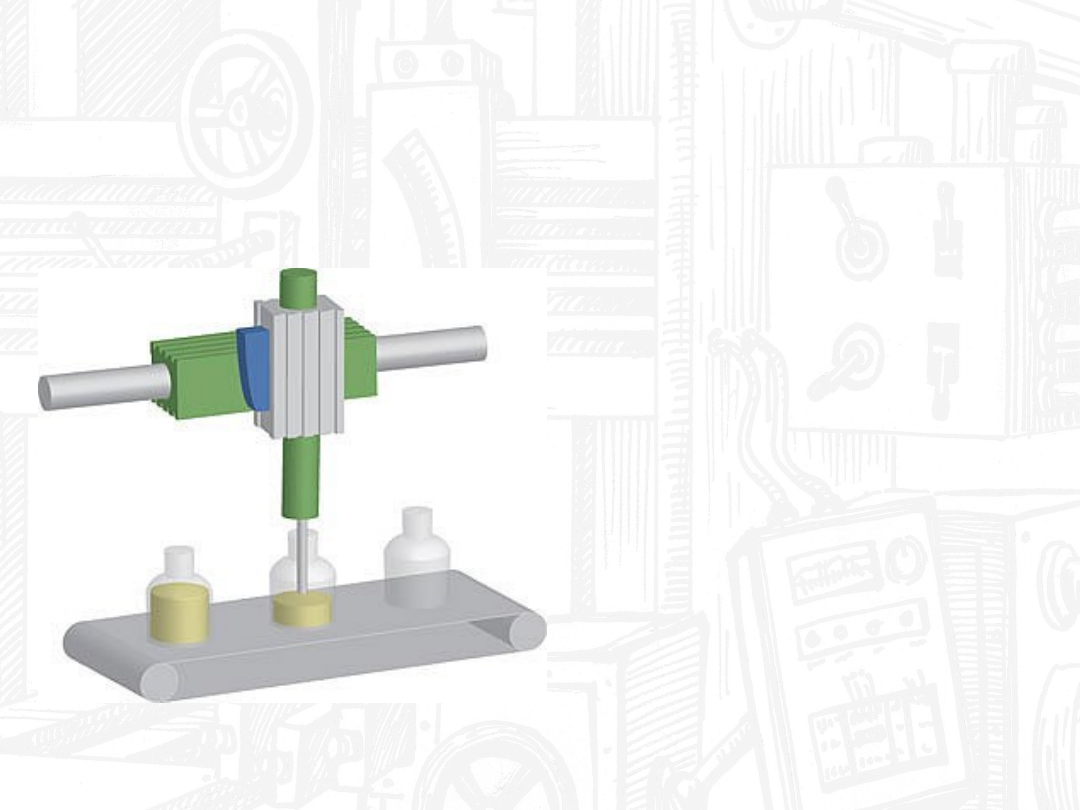
Przykłady aplikacji
Napełnianie butelek
Mechanika:
Siłownik podąża
śladem butelek
przemieszczających się na
przenośniku taśmowym. Aparat
napełniający wycofuje się wraz
ze wzrostem poziomu cieczy aby
zminimalizować pienienie.
Kontrola:
Enkoder na przenośniku
jest połączony z kontrolerem
Xenus, sterowanie za pomocą
tabeli CAM.
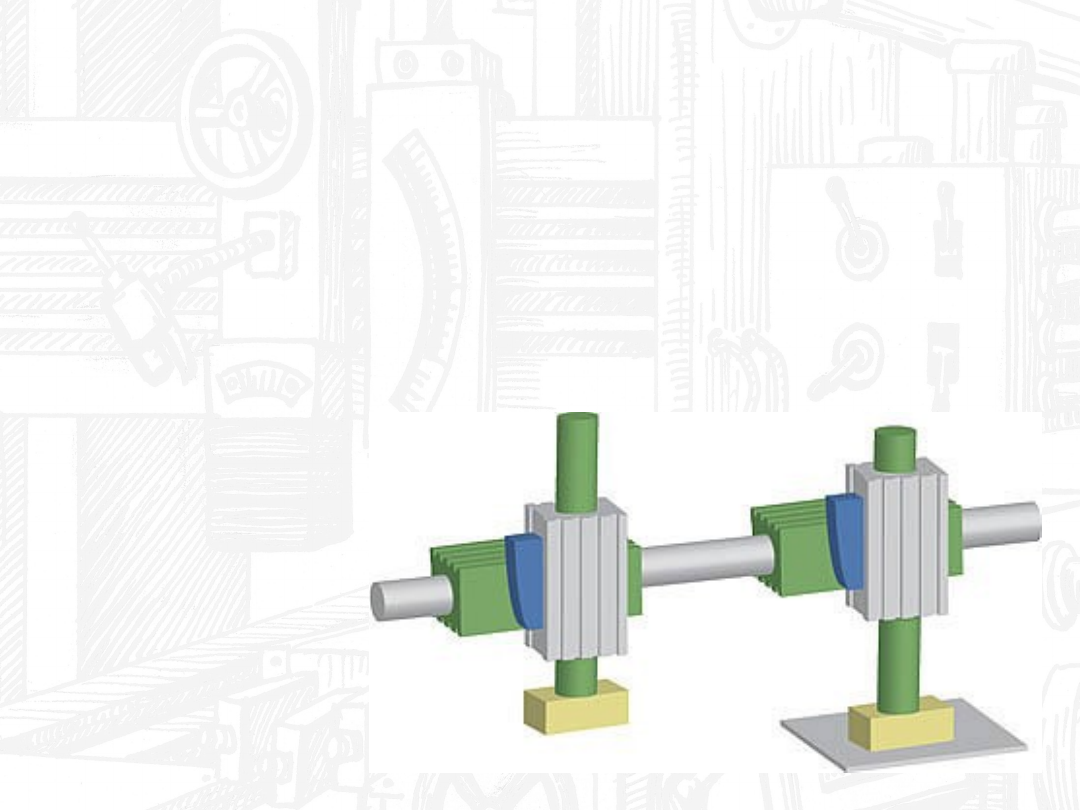
Przykłady aplikacji
Załadunek/Rozładunek
Mechanika:
Dwa forcery pracują na
pojedynczym wałku. Aparat przemieszczający
umieszcza produkt odpowiednim miejscu.
Kontrola:
Komputer PC koordynuje pracę
sterowników Xenus oraz Accelent łącząc się z
nimi poprzez CANopen.
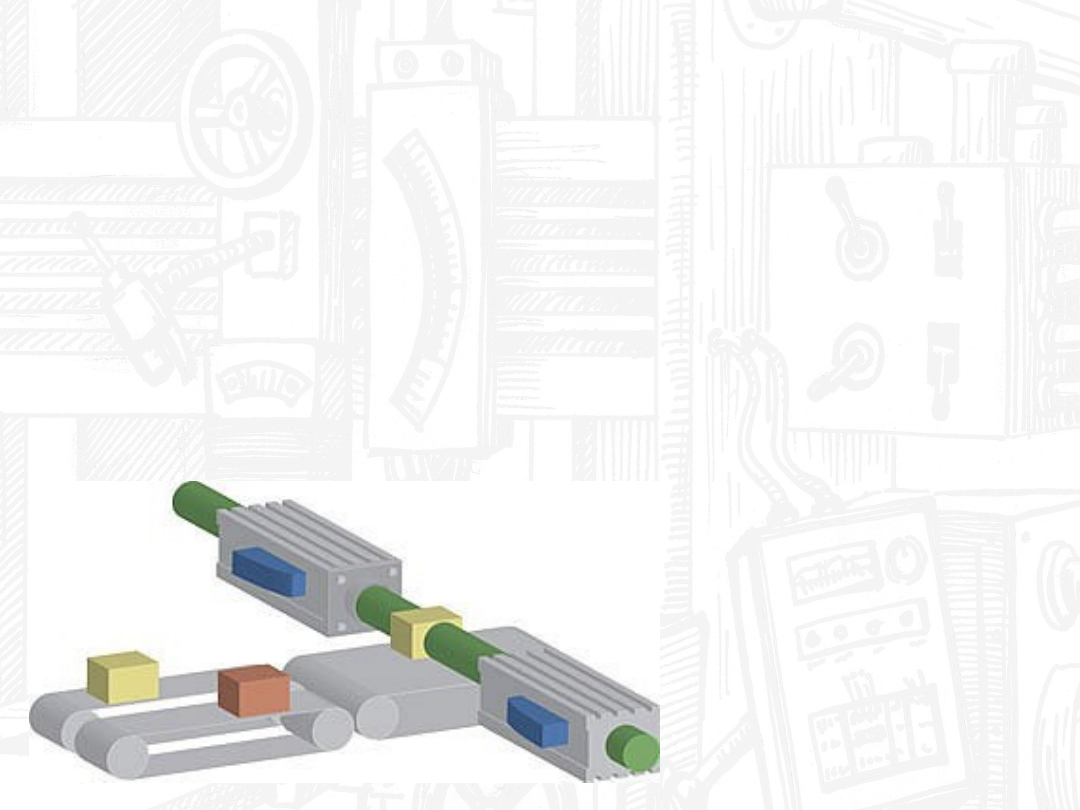
Przykłady aplikacji
Rozdzielanie produktów
Mechanika:
Ustawione naprzeciwko siebie
siłowniki chwytają przedmiot i przesuwają
go kierując na jeden z dwóch
przenośników taśmowych.
Kontrola:
Sterownik PLC pobiera informacje
z napędów o przebytej drodze i koordynuje
ruch, łącząc się z nimi przez DeviceNet.
Przykłady aplikacji
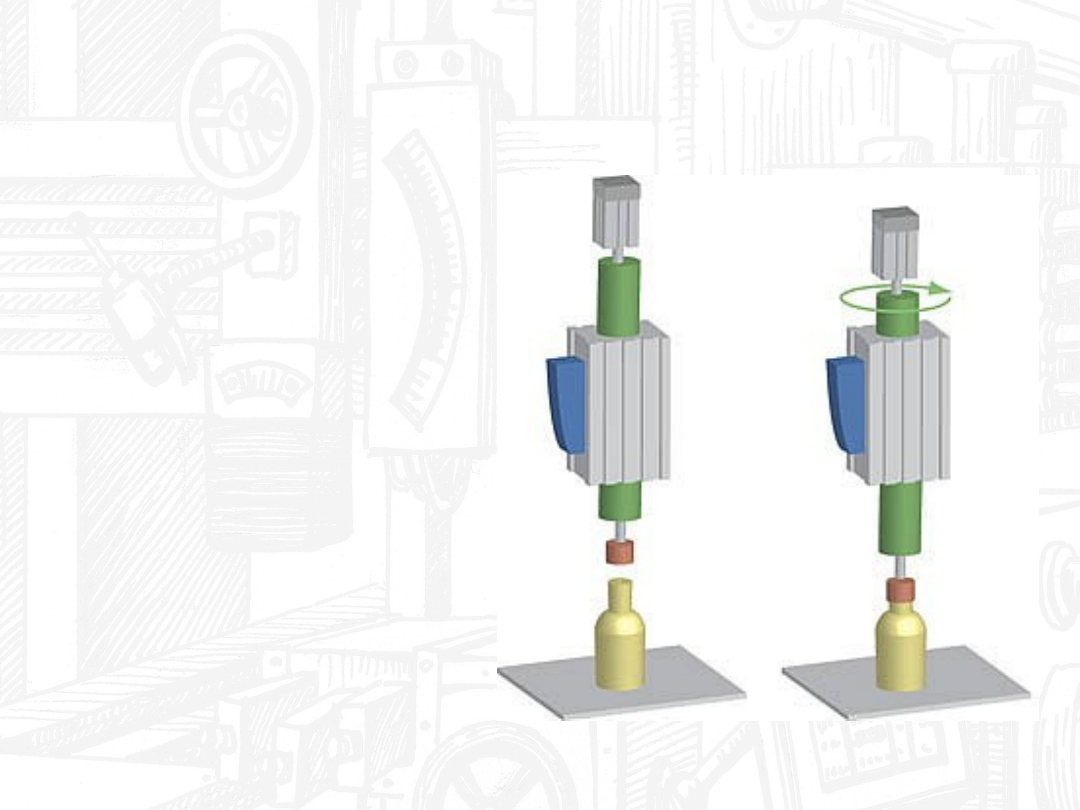
Kapslowanie butelek
Mechanika:
Napęd obniża
nakrętkę aż do
gwintu butelki. Silnik obraca
wałkiem i
dokręca nakrętkę.
Kontrola:
Kontroler Accelent
steruje
dojazdem do miejsca styku
nakrętki z
butelką, po sygnale DONE
sterownik PLC
uruchamia silnik obrotowy.
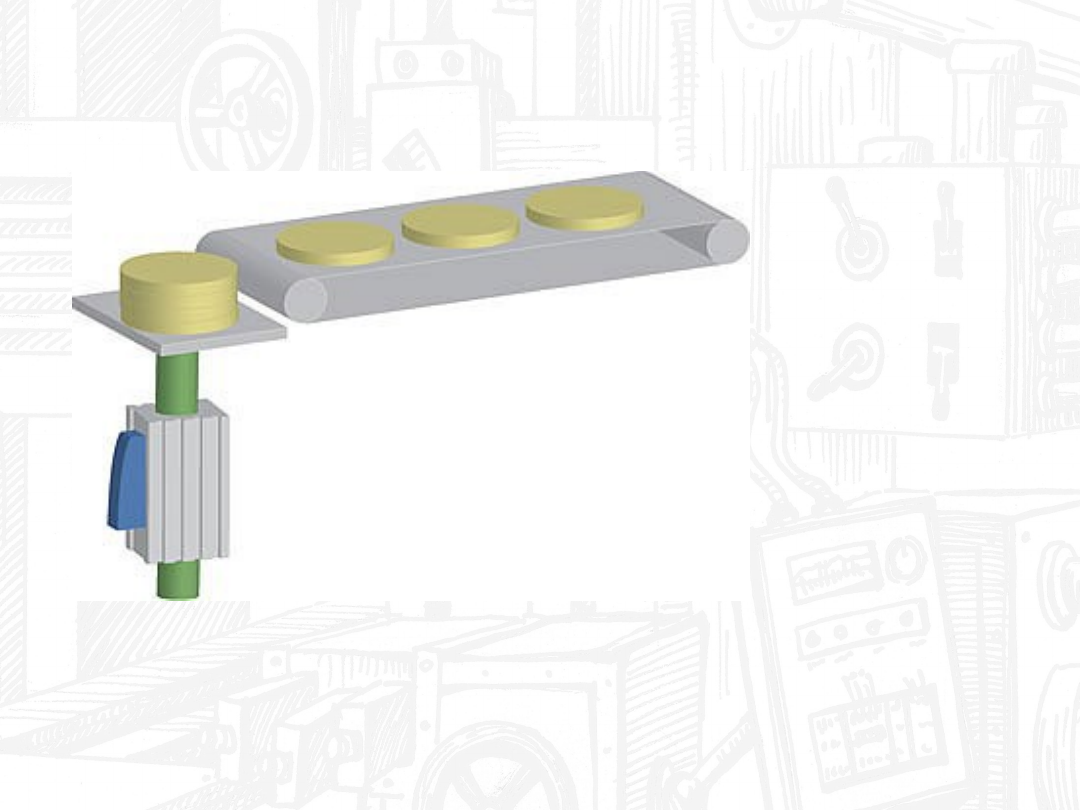
Przykłady aplikacji
Układanie elementów
Mechanika:
Tacka obniża się aż do
zaprogramowanego poziomu z
produktami
układanymi w stos.
Kontrola:
Czujnik produktów poprzez
kontroler
Xenus kolejno krok po kroku obniża
tackę. Po
osiągnięciu n-tego indeksu szybko
powraca
do pozycji startowej.
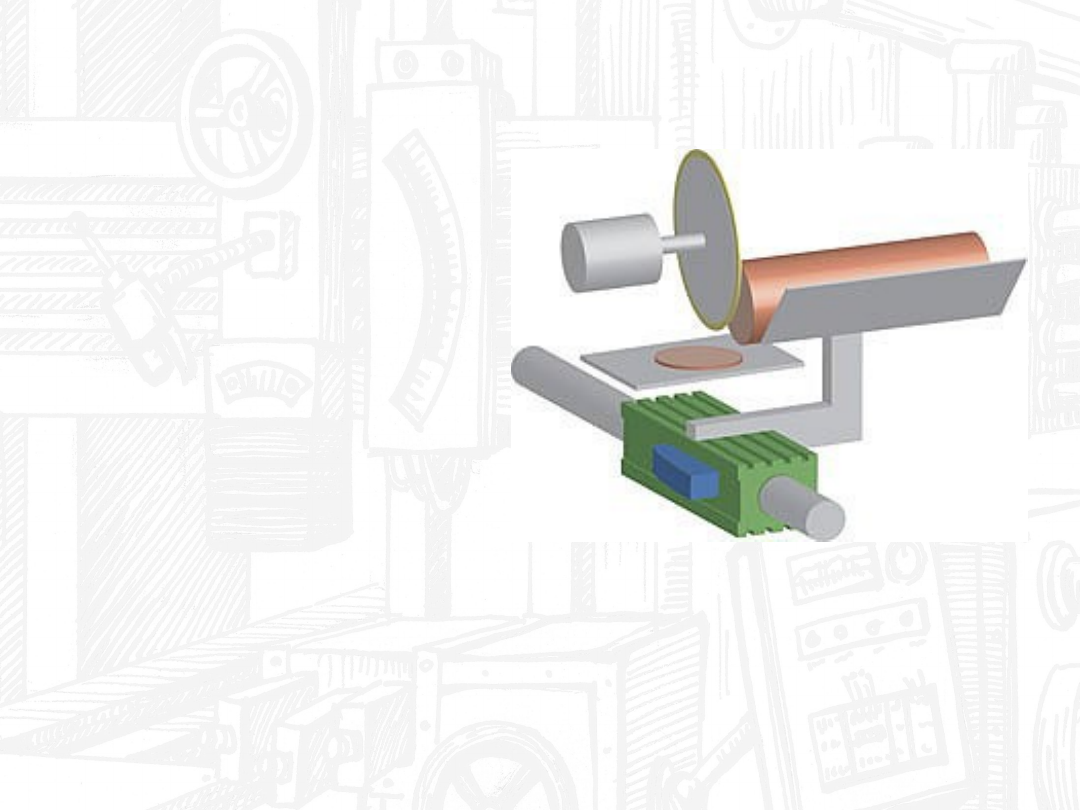
Przykłady aplikacji
Cięcie produktów
Mechanika:
Silnik dojeżdża wózkiem,
w którym jest produkt pod obracające
się ostrze.
Kontrola:
Kontroler Xenus umożliwia
ustawienie sekwencji cięcia
produktów różnej wielkości w celu
zoptymalizowania prędkości cięcia dla
każdego rozmiaru.
Strony firmy
•
http://
www.dunkermotor.com/default.asp?
id=116&lang=2
•
http://
www.eriks.co.uk/Automation/Media/
Files/Dunkermotoren/Dunkermotor%2
0Servo%20Tube%20Cat.pdf
Document Outline
- Slide 1
- Silniki liniowe Servotube
- Silnik liniowy Servotube - budowa
- Silniki liniowe Servotube – tryby pracy
- Silnik liniowy Servotube - hamulec
- Silnik liniowy Servotube – akcesoria montażowe
- Slide 7
- Slide 8
- Silniki liniowe Servotube – zalety rozwiązania
- Silniki liniowe Servotube – przykłady zastosowań
- Silniki liniowe Servotube – dane techniczne – seria STA
- Silniki liniowe Servotube – dane techniczne – seria STB
- Przykłady aplikacji
- Przykłady aplikacji
- Przykłady aplikacji
- Przykłady aplikacji
- Przykłady aplikacji
- Przykłady aplikacji
- Strony firmy
Wyszukiwarka
Podobne podstrony:
SILNIKI LINIOWE
Silnik piezoelektryczny liniowy
silniki prądu stałego
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
04 Zabezpieczenia silnikówid 5252 ppt
SILNIKI GRAFICZNE W GRACH KOMPUTEROWYCH
Prezentacja firmy MARSTATE SERVICE BHP PPOZ PPT
SILNIKI
Prezentacja OP silniki
budowa strategii firmy
silnik pradu stalego
Silnik rotacyjny, a silnik tłokowy
pezentacja produkty firmy Soudal
3 Analiza firmy 2015 (Kopia powodująca konflikty (użytkownik Maciek Komputer) 2016 05 20)
BIOLOGICZNE TEORIE FIRMY prezentacja
Algebra liniowa i geometria kolokwia AGH 2012 13
więcej podobnych podstron