
SILNIK PIEZOELEKTRYCZNY O POSUWIE LINIOWYM
Wprowadzenie
Silniki piezoelektryczne są elektryczno-mechanicznymi przetwornikami energii,
przetwarzają energię
elektryczną
w
ruch
wykorzystując
odwrotny
efekt
piezoelektryczny. Maksymalna możliwa deformacja elementu piezoceramicznego
określa i ogranicza zakres przesunięcia tegoż elementu. Odkształcenie elementu
piezoceramicznego jest przekształcane w obrotowy lub postępowy ruch wirnika lub
suwaka za pomocą nieciągłego sprzęgła ciernego. Silniki piezoelektryczne te osiągają
wysokie prędkości i duże momenty, pozwalając przy tym na bardzo precyzyjne
pozycjonowanie ruchomej części. Specyfiką tego typu napędów jest brak
wykorzystywania pola magnetycznego, oraz fakt że wraz z miniaturyzacją nie maleje
sprawność tych napędów.
Efekt piezoelektryczny i odwrotny efekt piezoelektryczny
Prostym efekt piezoelektrycznym nazywamy zjawisko powstawania indukcji
elektrycznej w ciele stałym pod wpływem naprężenia. Efekt piezoelektryczny można
obserwować w niektórych materiałach krystalicznych, polimerowych i ceramikach. W
przypadku materiałów krystalicznych, kryształy piezoelektryczne są układami nie
posiadającymi środka symetrii. Odwrotnym efektem piezoelektrycznym nazywamy
zjawisko powstawania odkształceń kryształu pod wpływem pola elektrycznego.
Własności elementów piezoelektrycznych
Stała proporcjonalności d (stała piezoelektryczna) obowiązuje dla prostego i
odwrotnego zjawiska piezoelektrycznego:
E
S
T
D
d
=
=
(1)
gdzie:
D- indukcja elektryczna,
2
T - siła,
S- odkształcenie,
E- pole elektryczne
Uwzględniając możliwe relacje miedzy kierunkiem polaryzacji w piezokrysztale, a
składową naprężeń można wyróżnić:
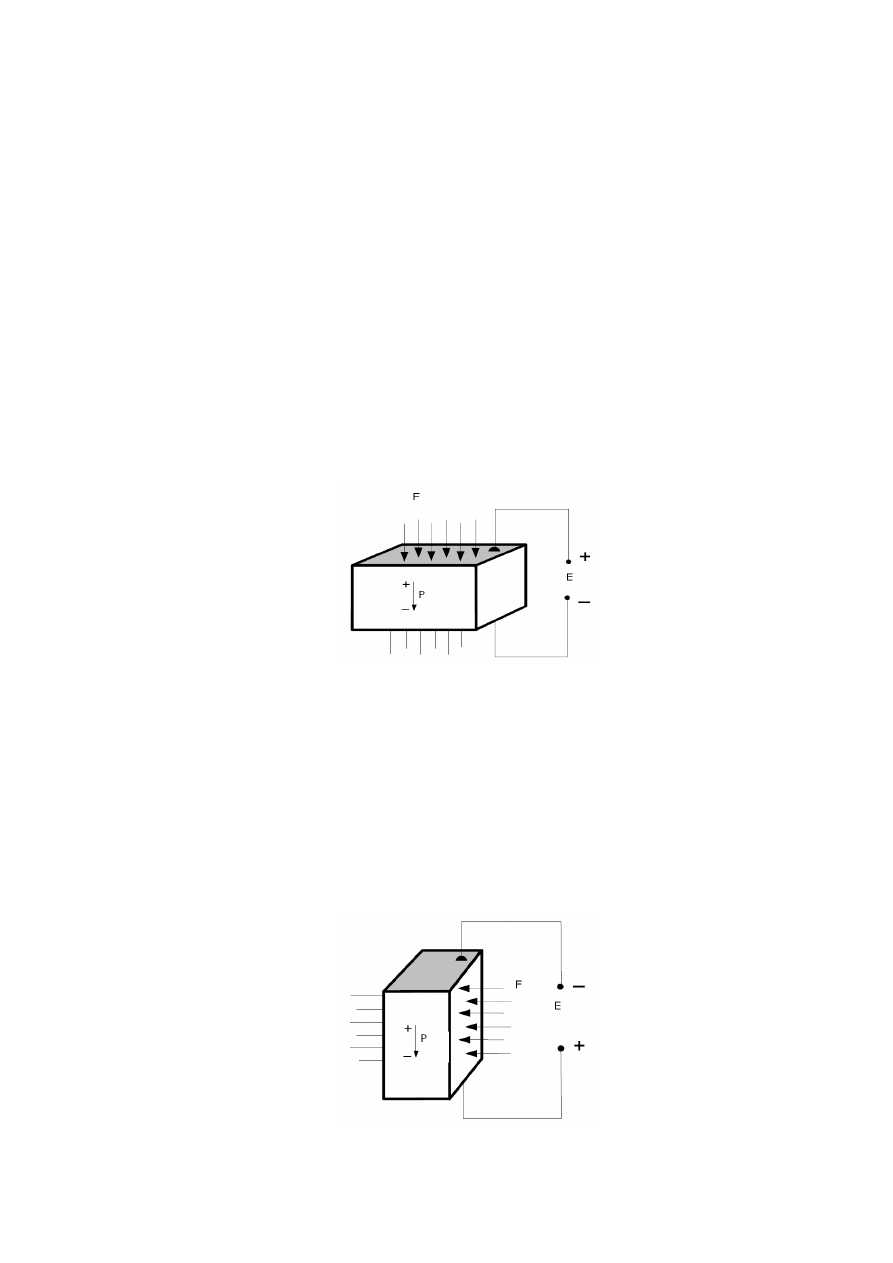
1) Podłużny efekt piezoelektryczny, w którym kierunki naprężenia mechanicznego i
indukcji elektrycznej (polaryzacji) są zgodne, w tym przypadku:
3
33
3
T
d
D
=
(2)
Dla odwrotnego efektu piezoelektrycznego:
3
33
3
E
d
S
=
(3)
Rys. 1. Podłużny efekt piezoelektryczny wg [4]
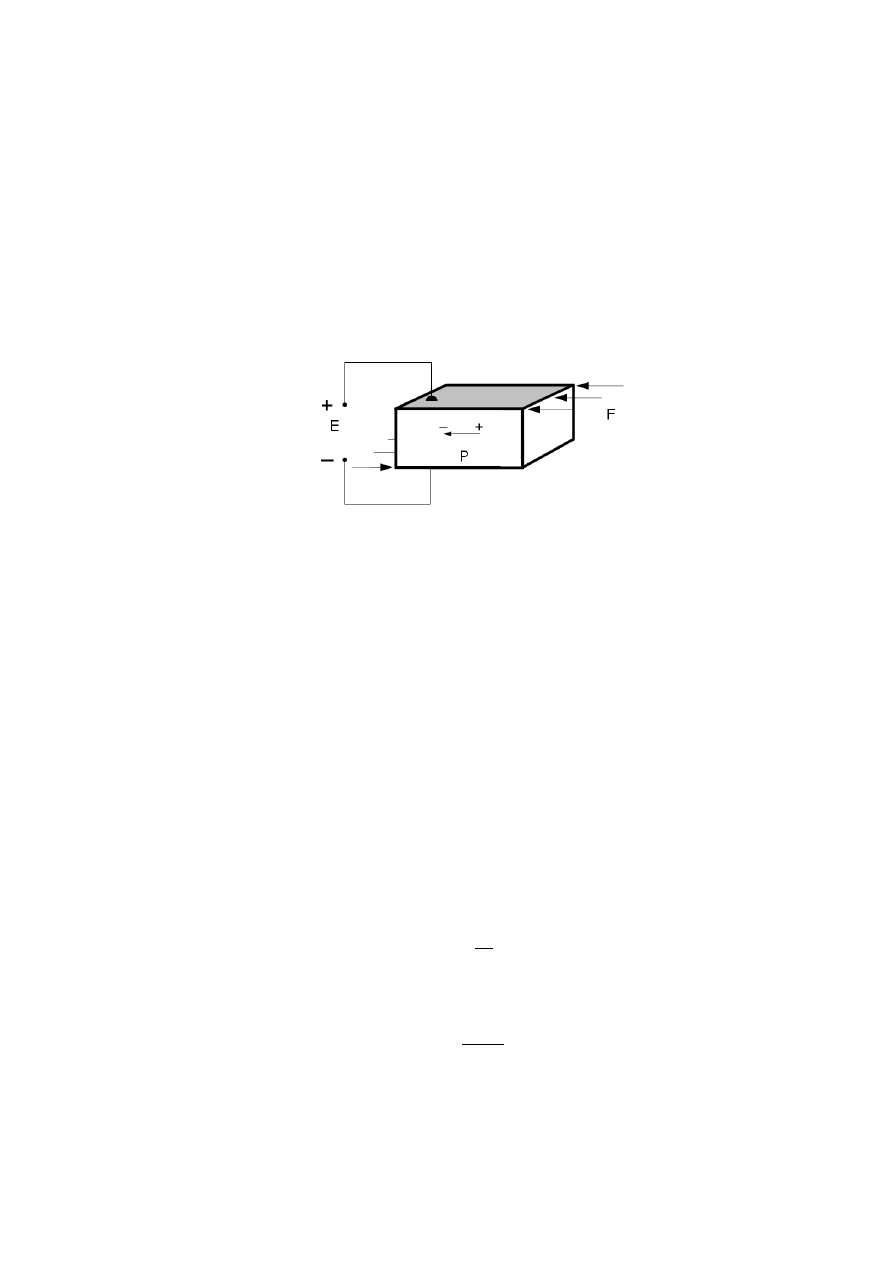
2) Poprzeczny efekt piezoelektryczny, w którym kierunki naprężenia mechanicznego i
indukcji elektrycznej (polaryzacji) są do siebie prostopadłe:
1
31
3
T
d
D
=
(4)
Dla odwrotnego efektu piezoelektrycznego
3
31
1
E
d
S
=
(5)
Rys. 2. Poprzeczny efekt piezoelektryczny wg [4]
3
3) Skrośny efekt piezoelektryczny, w którym wektor polaryzacji jest równoległy do
płaszczyzny ścięcia:
5
15
1
T
d
D
=
(6)
Dla odwrotnego efektu piezoelektrycznego:
1
15
5
E
d
S
=
(7)
W zależnościach (2) do (7)
ik
d
opisuje związek między składową naprężeń
mechanicznych
k
T
a składową indukcji elektrycznej
i
D
.
Rys.3. Skrośny efekt piezoelektryczny wg [4]
Podstawowe stałe i wartości charakteryzujące właściwości piezoelektryczne
Właściwości piezoelektryczne materiałów charakteryzują:
–
Stała
piezoelektryczna
odkształceń
d
ij
odpowiadająca
mechanicznym
odkształceniom, wytworzonym przez przyłożone pole elektryczne (indeksy ij
określają kierunek przyłożonego napięcia oraz kierunek naprężenia, odkształcenia)
–
Stała piezoelektryczna g
ij
opisująca pole elektryczne wytworzone pod wpływem
wprowadzonych naprężeń
–
Względna stała dielektryczna K określająca stosunek przenikalności elektrycznej
materiału do przenikalności elektrycznej próżni:
0
ε
ε
=
K
(8)
–
Pojemność zależąca od typu materiału i od jego wymiarów geometrycznych:
t
A
K
C
0
ε
=
(9)
gdzie:
A - pole powierzchni elementu
t - grubość warstwy oddzielające elektrody.
4
Koncepcja budowy napędu piezoelektrycznego
Dla potrzeb laboratorium został skonstruowany silnik piezoelektryczny o posuwie
liniowym. Na rys. 4 przedstawiony został orientacyjny układ zamocowania
przetworników piezoelektrycznych w konstruowanym modelu silnika. Do zasilania
elementów piezoelektrycznych użyto zasilacza o dwóch wyjściach o regulowanych
poziomach napięcia. Napięcia wyjściowe zasilacza (kształt, przesunięcia fazowe) były
projektowane pod konkretną konstrukcję napędu. Wolne końce elementów
piezoelektrycznych pod wpływem zasilenia ich napięciem sinusoidalnym wykonują
ruchy drgające powtarzalne.
Rys. 4. Układ zamocowania przetworników piezoelektrycznych w napędzie.
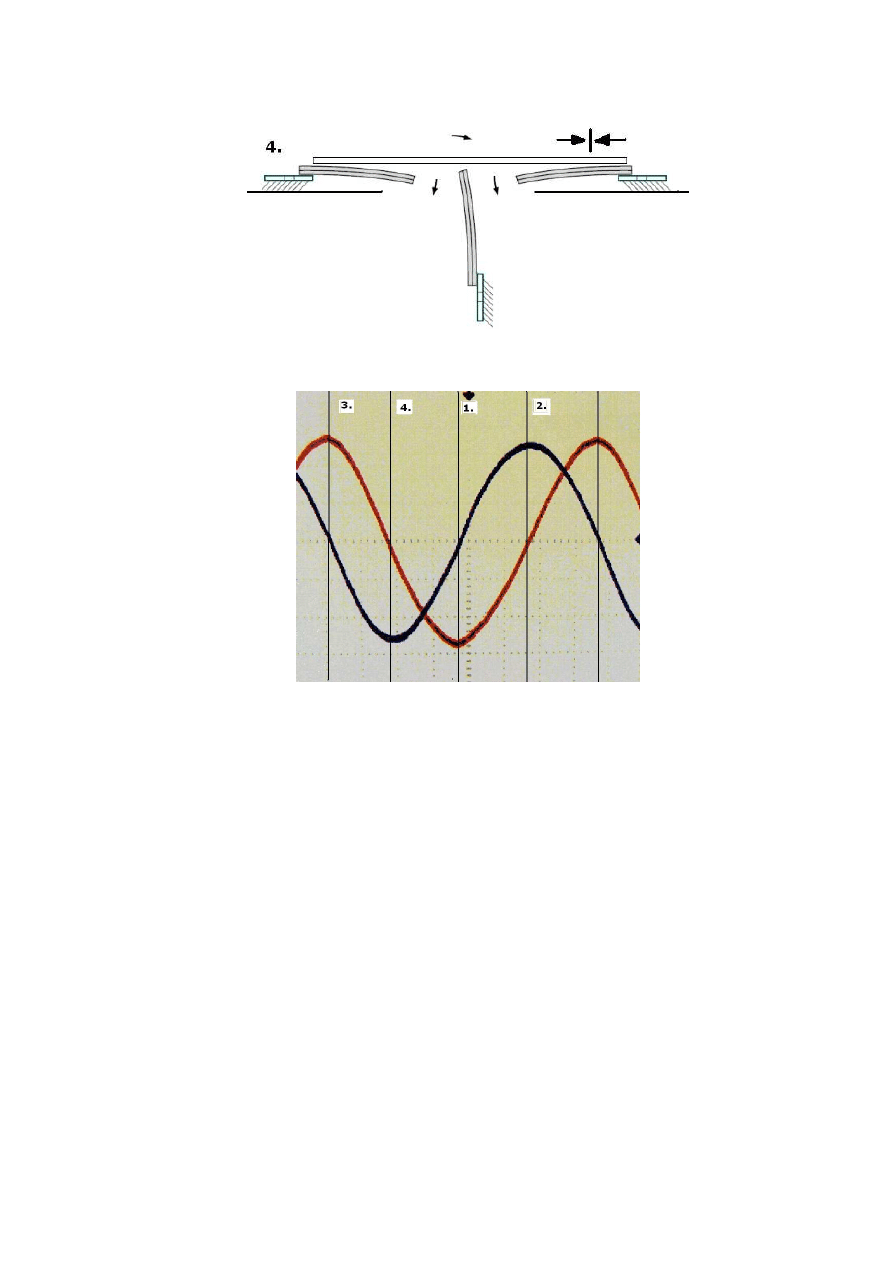
Działanie konstruowanego napędu można prześledzić na rys. 5 i 6. Na rys. 6 pokazane
są przebiegi napięcia zasilającego przetworniki. Przebieg niebieski jest podawany na
pionowo ustawiony element piezoelektryczny, przebiegiem czerwonym jest zasilona
para przetworników umocowana w poziomie. Przebiegi napięcia podzielone są na 4
cykle odpowiadające przebiegom wychylenia przetworników.
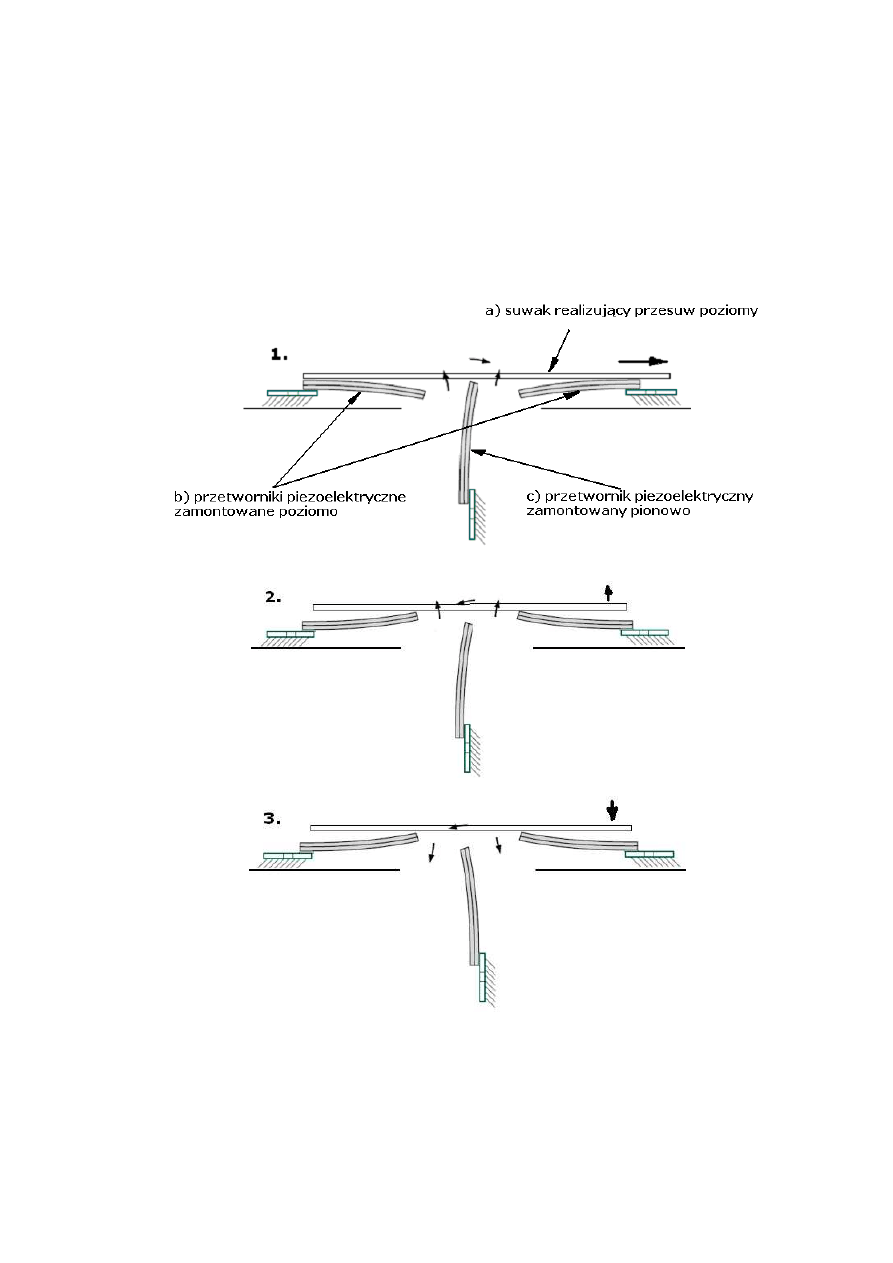
W pierwszej fazie działania napędu przetwornik pionowy popycha suwak w kierunku
poziomym, natomiast dwa poziome przetworniki wracają do położenia zerowego
(rys. 5.1).
W drugiej fazie przetwornik pionowy wraca do położenia zerowego, a przetworniki
poziome unoszą delikatnie suwak uniemożliwiając tym samym powrót rys. 5.2).
Położenie zerowe określa położenie spoczynkowe przetworników.
W trzeciej fazie przetwornik pionowy odchyla się w kierunku przeciwnym do
przesuwu suwaka, a przetworniki poziome powracają do punktu zerowego
opuszczając tym samym suwak (rys. 5.3).
5
W czwartej fazie przetwornik pionowy wraca do punktu zerowego, a przetworniki
poziome wychylają się w przeciwną stronę do kierunku unoszenia suwaka. W tej fazie
suwak nie przemieszcza się (rys. 5.4). Następnie cały proces jest cyklicznie
powtarzany. Dzięki przesunięciu fazowemu napięć zasilających możemy właśnie
obserwować taką kombinację ruchów przetworników piezoelektrycznych.
6
Rys. 5. Praca przetworników z podziałem na fazy.
Rys. 6. Napięcia zasilania z podziałem na fazy pracy przetworników.
Stanowisko laboratoryjne
Zasilanie silnika piezoelektrycznego
Został zastosowany układ zasilania oparty na generatorze funkcji XR-8038 firmy
Exar. Układ ten może generować trzy różne sygnały (sinusoidalny, prostokątny,
trójkątny), odznacza się mały zniekształceniem 1%, szerokim zakresem generowanych
częstotliwości 0,001-300 kHz, możliwością zmiany wypełnienia 1-99% oraz
nieskomplikowaną aplikacją. Do budowy generatora użyto gotowego układu AVT.
Możliwości zmiany częstotliwości, wypełnienia, oraz regulacja poziomu napięcia
uzyskana na stopniu wyjściowym całego układu są wykorzystane do wyznaczenia
podstawowych charakterystyk elementu piezoelektrycznego. Stopień wyjściowy
układu stanowi blok wzmacniacza oparty na układzie OPA452. Generator zasilany jest
7
za pomocą prostego zasilacza o napięciach symetrycznych +/- 12V. Blok wyjściowy
stanowią dwa tory wzmacniające oparte na wzmacniaczu operacyjnym OPA452 w
standardowym układzie. Jeden z torów wzmacniających został poprzedzony układem
przesuwnika fazy zbudowanym na wzmacniaczu operacyjnym UA741, przesunięcie
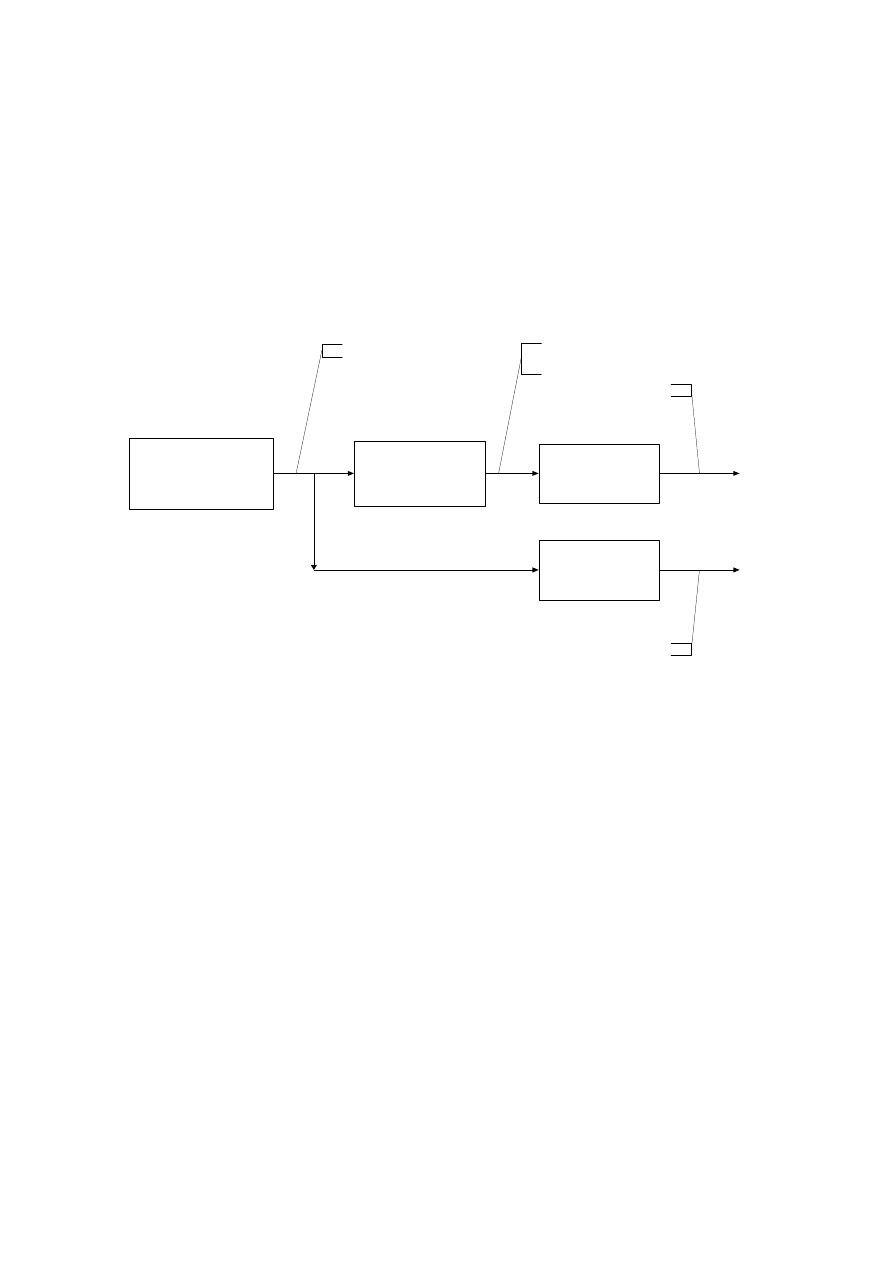
fazy sygnału wejściowego wynosi 90˚. Schemat blokowy układu zasilania pokazano
na rys. 7.
Generator
funkcyjny (XR8038)
Układ
przesuni
ę
cia
fazowego
Blok
wzmacniaj
ą
cy
(OPA452)
Blok
wzmacniaj
ą
cy
(OPA452)
Sygnał wyj
ś
ciowy 1
Sygnał wyj
ś
ciowy 2
Sygnał sinusoidalny
Sygnał sinusoidalny
przesuni
ą
ty w fazie o 90
stopni
Rys. 7. Schemat blokowy układu zasilania
Sygnał wyjściowy ma częstotliwość 270 Hz, amplitudę 2-3 V i zerową składową stałą.
Elementy piezoelektryczne wykorzystane w konstrukcji napędu piezoelektrycznego
Do budowy napędu piezoelektrycznego zastosowano cienkie, dwuwarstwowe
elementy. Takie elementy mają najbardziej wszechstronne zastosowanie ze
wszystkich. Mogą być użyte jako pojedyncze płytki (zbudowane z dwóch warstw),
oraz osiągają duże wychylenia w stosunku do innych piezoprzetworników.
Dwuwarstwowe elementy mogą być skonstruowane w taki sposób, aby się rozciągać,
zaginać albo skręcać w zależności od polaryzacji i konfiguracji instalacji elektrycznej
warstw. Środkowa wkładka regulacyjna pomiędzy dwoma piezo warstwami nadaje
mechaniczną siłę i sztywność, oraz redukuje ruch. Określenie „dwuwarstwowy”
nawiązuje do ilości warstw piezo. Dwuwarstwowy element ma w rzeczywistości 9
warstw, na co składają się: 4 warstwy elektrod, 2 piezoceramiczne warstwy, 2 warstwy
8
adhezyjne i jedna centralna podkładka regulacyjna. Dwie warstwy piezo dają
możliwość zredukowania napięcia zasilającego o połowę do takiego samego działania
jak przy jednej.
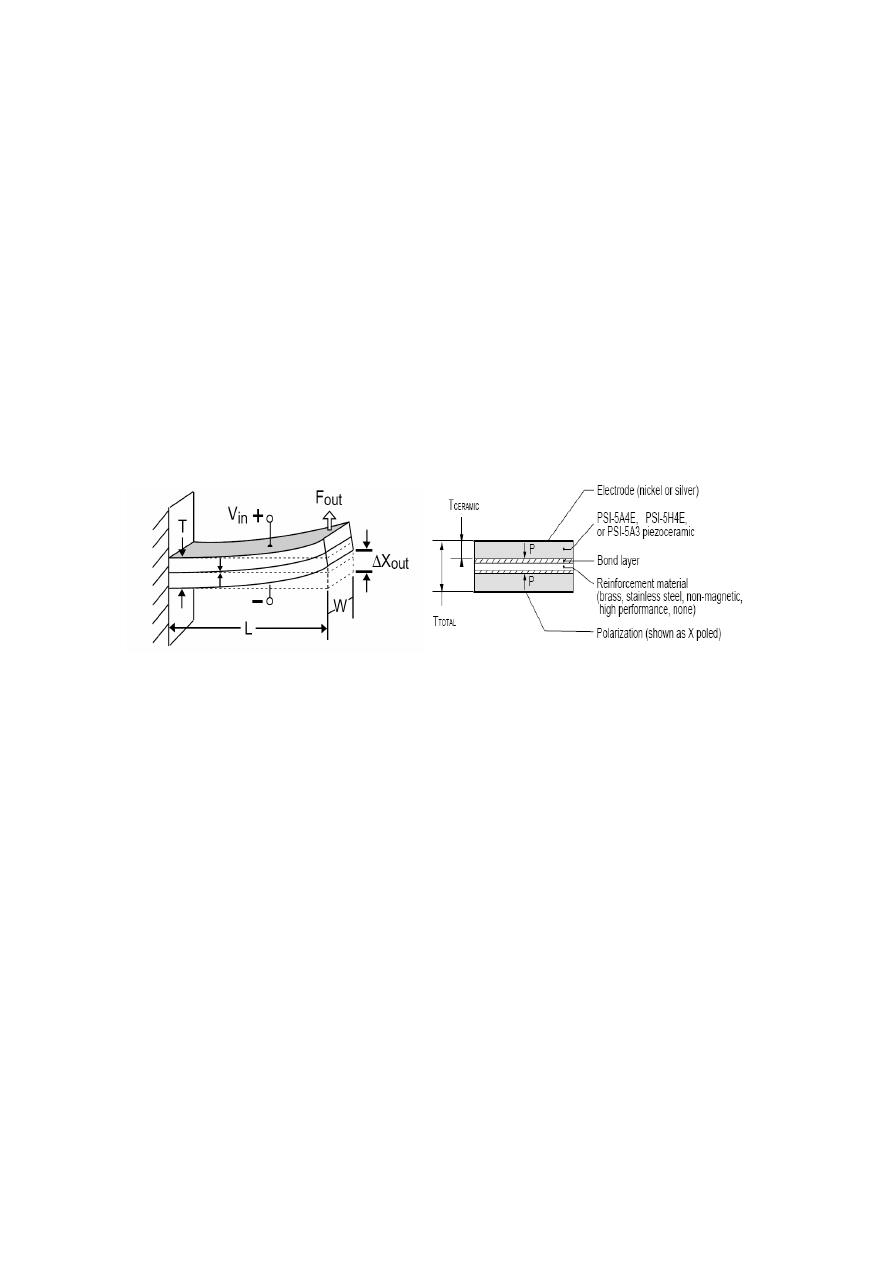
Dwuwarstwowy element wykorzystany w napędzie wytwarza ruch zginający, gdy
jedna warstwa się wydłuża a druga skraca. Te przetworniki są często określane jako
bimorfy, lub elementy giętkie. Elementy tego typu wytwarzają ruch zginający w
przedziale wartości setek do tysięcy mikrometrów, a siła zginania zawiera się w
przedziale od setnych do dziesiętnych Newtona. Rys. 8 pokazuje zakres ruchu
realizowany poprzez element piezoelektryczny wykorzystany na stanowisku oraz
budowę przetwornika bimorficznego.
Rys. 8. Rodzaj ruchu przetwornika i budowa bimorfa [4]
Piezoelektryczne przetworniki są zazwyczaj charakteryzowane poprzez parametry
takie jak swobodne odchylenie i siła blokowania. Swobodne odchylenie (X
f
)
odpowiada przesunięciu przy maksymalnym zalecanym napięciu, gdy siłownik
porusza się w pełni swobodnie i nie wywiera żadnej siły. Siła blokowania (F
b
)
odpowiada sile wywieranej przy maksymalnym zalecanym napięciu, gdy siłownik jest
zupełnie zablokowany i niezdolny do ruchu. Maksymalne odchylenie występuje gdy
siła jest równa zeru, a siła jest maksymalna gdy odchylenie jest zerowe.
Najważniejsze parametry użytych przetworników (wartości wg producenta) to:
–
Napięcie maksymalne zasilania przetwornika U = 28 V wartości skutecznej
–
Wychylenie maksymalne +/- 300 µm
–
Częstotliwość rezonansowa 270 Hz.
Pomierzoną charakterystykę amplitudowo-częstotliwościową elementu pokazano na
rys. 9, zaś na rys 10 pokazano dodatkowo przeliczoną charakterystykę modułu
impedancji element w funkcji częstotliwości.
9
0
1
2
3
4
5
6
7
8
9
0
50
100
150
200
250
300
350
400
Cz
ę
stotliwo
ść
[Hz]
P
r
ą
d
[
m
A
]
Rys. 9. Charakterystyka amplitudowo częstotliwościowa, zasilanie napięciem sinusoidalnym o
wartości skutecznej 21 V
Przebieg impedancji odpowiada dokładnie zachowaniu się pojemności pod wpływem
zmiany częstotliwości.
0
2000
4000
6000
8000
10000
12000
0
100
200
300
400
Cz
ę
stotliwo
ść
[Hz]
Im
p
e
d
a
n
c
ja
[
O
h
m
]
Rys. 10. Przebieg charakterystyki impedancji w funkcji częstotliwości.
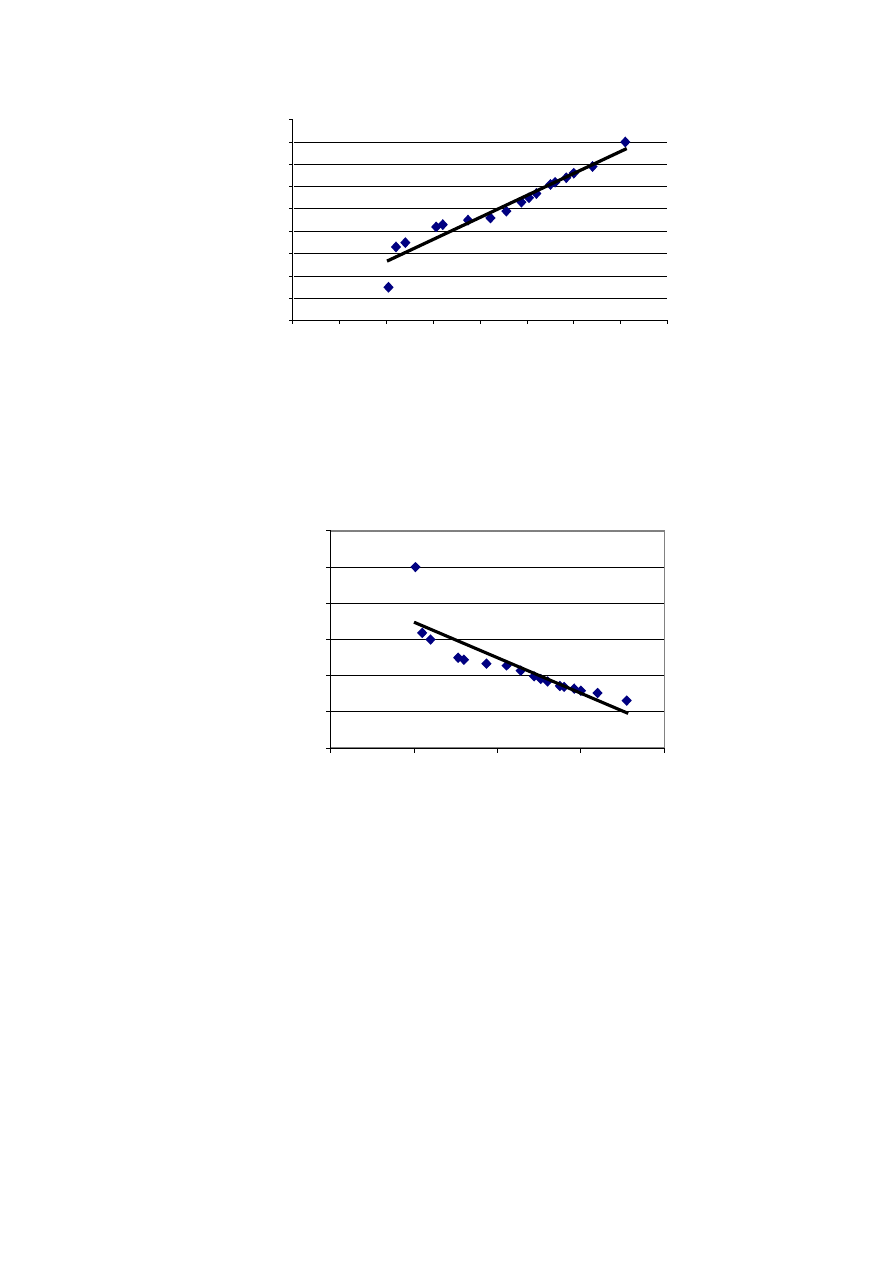
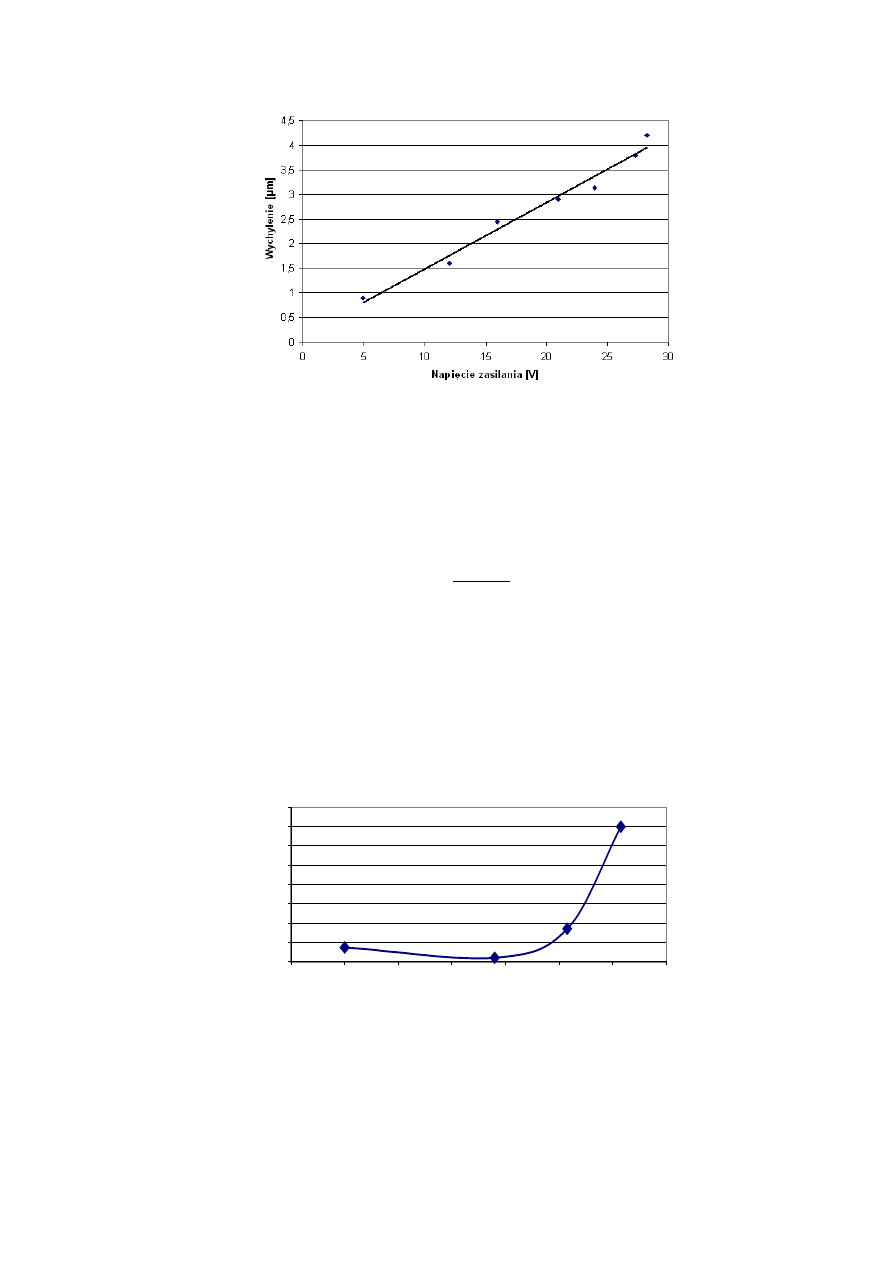
Na rys. 11 i 12 zamieszczono charakterystyki wychylenia przetwornika w funkcji
napięcia i częstotliwości zasilania.
10
Rys. 11. Charakterystyka wychyleniowo-napięciowa dla częstotliwości 270 Hz
Z charakterystyki jasno wynika, że wychylenie elementu piezoelektrycznego jest
liniową funkcją napięcia zasilania. Wychylenie bezpośrednio zależy tylko od napięcia,
ponieważ cała reszta jest stała.
2
31
2
4L Vd
x
T
=
(10)
gdzie:
L-długość przetwornika
31
d
-stała piezoelektryczna materiału
T- grubość warstwy piezoceramiki.
0
10
20
30
40
50
60
70
80
80
100
120
140
160
180
200
220
[Hz]
10-
6m
Rys. 12. Zależność wychylenia od częstotliwości
Częstotliwość rezonansowa przetwornika znajduje się w przedziale częstotliwości ok.
200 Hz, co nie odpowiada z danym producenta (270 Hz).
11
Konstrukcja napędu piezoelektrycznego
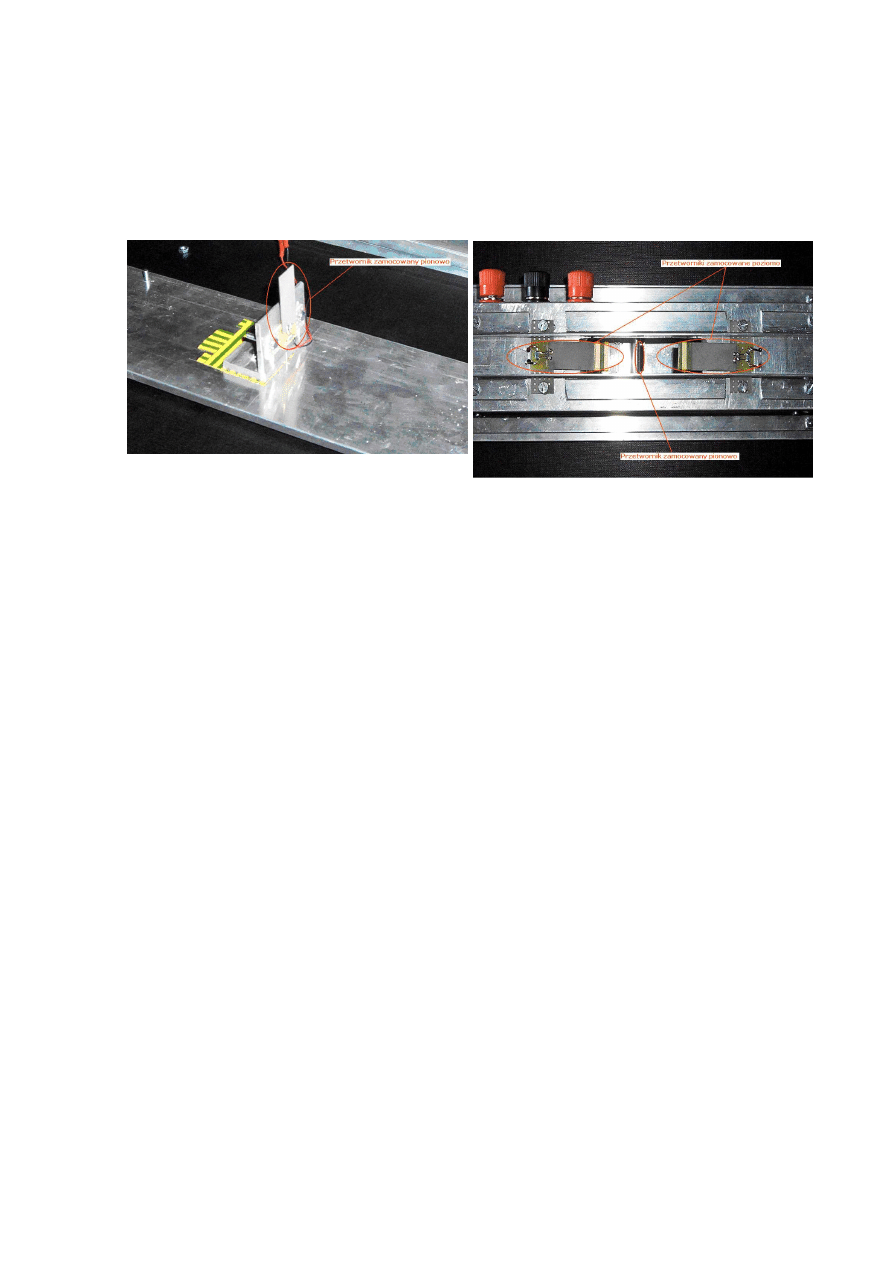
Na zdjęciach rys. 13 pokazane jest zamocowanie przetworników piezoelektrycznych.
a)
b)
Rys. 13. Mocowanie przetworników piezoelektycznych: a) pionowego, b) poziomych
Na zdjęciu (rys. 13b) widać również koryto prowadzące przygotowane do umiesz-
czenia w nim suwaka. Suwak wykonany jest z PCV. Koryto spełnia dodatkową
funkcję, prócz prowadzenia suwaka osłania i chroni przetworniki piezoelektryczne
przed zniszczeniem poprzez bezpośredni uchwyt.
Para zacisków na stanowisku od lewej strona jest przeznaczona do zasilania
przetwornika zamontowanego pionowo.
Pomiary laboratoryjne
Dla wszystkich przetworników ustawiona jest na stałe częstotliwość zasilania ok.
255 Hz, nie można jej zmieniać. Można natomiast zmieniać napięcie zasilania
przetworników poziomych i pionowego.
Należy zbadać prędkość przemieszczania się suwaka w zależności od napięć
zasilających przetworniki. Prędkość obliczyć pośrednio poprzez pomiary drogi
(linijką) i czasu (stoperem). Pomiary wykonać dla napięcia zasilania przetwornika
poziomego ok. 14,2 V i dla napięcia zasilania przetwornika pionowego zmienianego w
granicach od ok. 3,5 V do ok. 21,3 V. Przeprowadzić minimum 6 serii pomiarów. Na
podstawie obliczonych wartości prędkości wykreślić charakterystykę v = f(U
pion
).
12
Następnie wyłączyć napięcie podawane na przetwornik pionowy, natomiast zasilić
przetworniki poziome napięciem o wartości skutecznej ok. 1,4 V, zaobserwować
działanie napędu, obliczyć prędkość suwaka.
Dla dowolnie wybranej konfiguracji napięć zasilających przetworników obejrzeć na
oscyloskopie przebiegi napięć i zapisać.
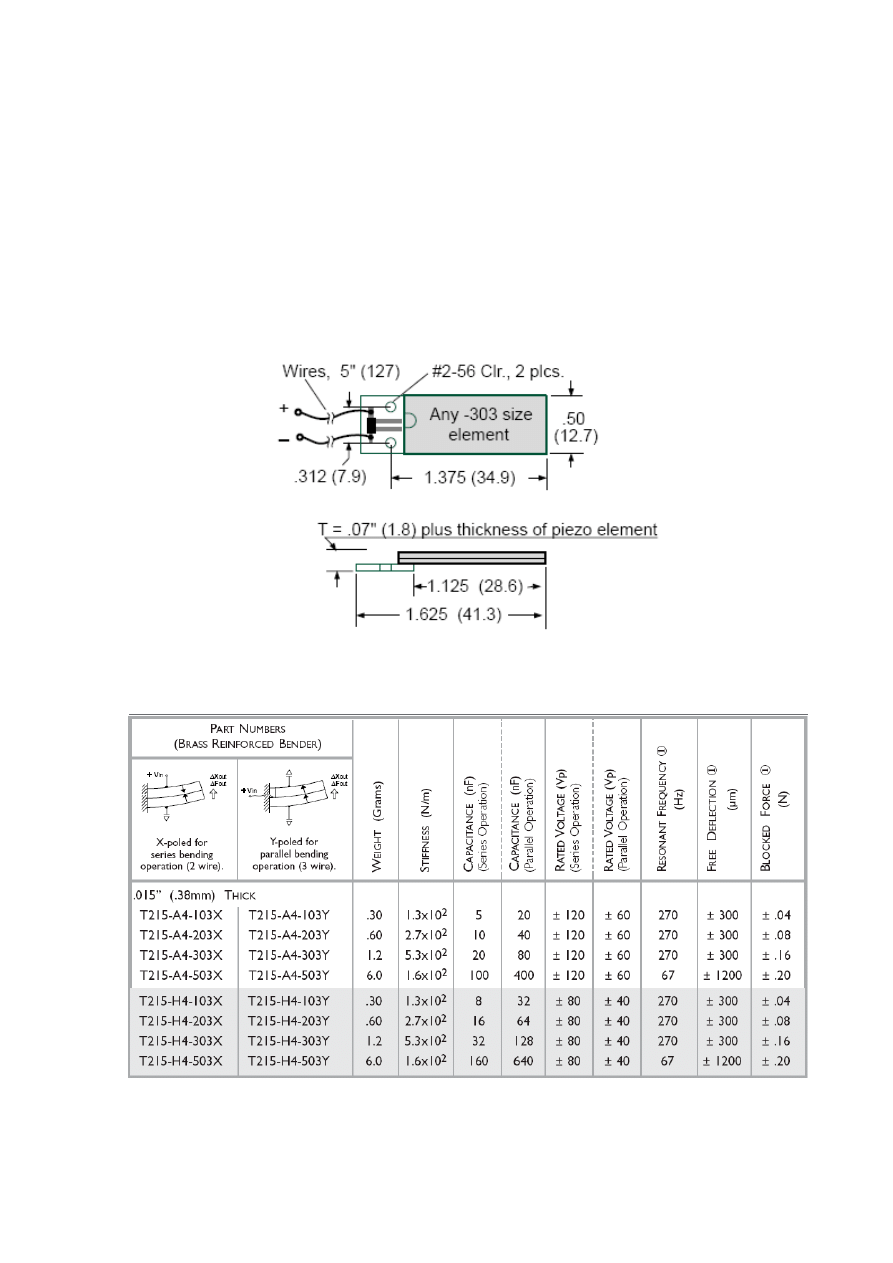
Załącznik A - Wymiary, oraz rzut z góry i z boku przetwornika piezoelektrycznego
Załącznik B - Parametry charakterystyczne dla przetwornika T215-H4-303YB
Literatura:
[1] Zakrzewski J. : Czujniki i przetworniki pomiarowe. Gliwice 2004, ISBN 83-7335-171-X

13
[2]Miłek M.: Metrologia elektryczna wielkości nieelektrycznych. Zielona Góra 2006, ISBN 83-7481-
023-8
[3] Smolucha W.: Wstęp do piezoelektroniki. WKŁ, Warszawa 1980, ISBN 83-206-0041-3.
[4] http://www.czujniki.pl (24.06.2008)
[5] http://www.piezo.com (24.06.2008)
[6] http://www.newscaletech.com (24.06.2008)
[7] http://www.physikinstrumente.com (24.06.2008)
[8] http://www.siemens.pl (24.06.2008)
Wyszukiwarka
Podobne podstrony:
silnik piezoelektr
8 Silnik piezoelektryczny
SILNIKI LINIOWE
Silniki liniowe Servotube firmy Dunkermotoren
silniki prądu stałego
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
04 Zabezpieczenia silnikówid 5252 ppt
SILNIKI GRAFICZNE W GRACH KOMPUTEROWYCH
SILNIKI
Prezentacja OP silniki
silnik pradu stalego
Silnik rotacyjny, a silnik tłokowy
Algebra liniowa i geometria kolokwia AGH 2012 13
A3 Silnik indukcyjny pierscieniowy program
KODY USTEREK EOBD SILNIK ES9J4S (XFX)
więcej podobnych podstron