7.
PODSTAWY STEROWANIA RUCHEM POCIAGÓW
Zasada bezpiecznej jazdy pociągu
Ruch pociągów na liniach kolejowych odbywa się według ściśle określonych
zasad i procedur, ujętych przepisami, dzięki którym realizowany jest w sposób
bezpieczny i racjonalny.
Bezpieczne prowadzenie ruchu pociągów na linii kolejowej wymaga
oddzielenia jednego pociągu od drugiego:
- pewną długością toru kolejowego - dzieląc tor na odcinki i prowadząc ruch
pociągów tak, żeby na określonym odcinku toru nie było więcej pociągów niż
jeden,
- odstępem czasu - wysyłając każdy następny pociąg po upływie określonego
odstępu czasu, uznanego za wystarczający, liczonego od wyjazdu pociągu
poprzedzającego.
Pierwszy sposób prowadzenia ruchu całkowicie zapewnia bezpieczeństwo i
dlatego jest powszechnie stosowany. Wymaga on sprawdzania obecności taboru
na rozważanym odcinku toru. Dokładne miejsca podziału toru kolejowego na
odcinki, w terminologii kolejowej zwane odstępami blokowymi, są na ogół na
liniach kolejowych wyznaczane przez semafory (linie zautomatyzowanego
metra mogą nie mieć semaforów).
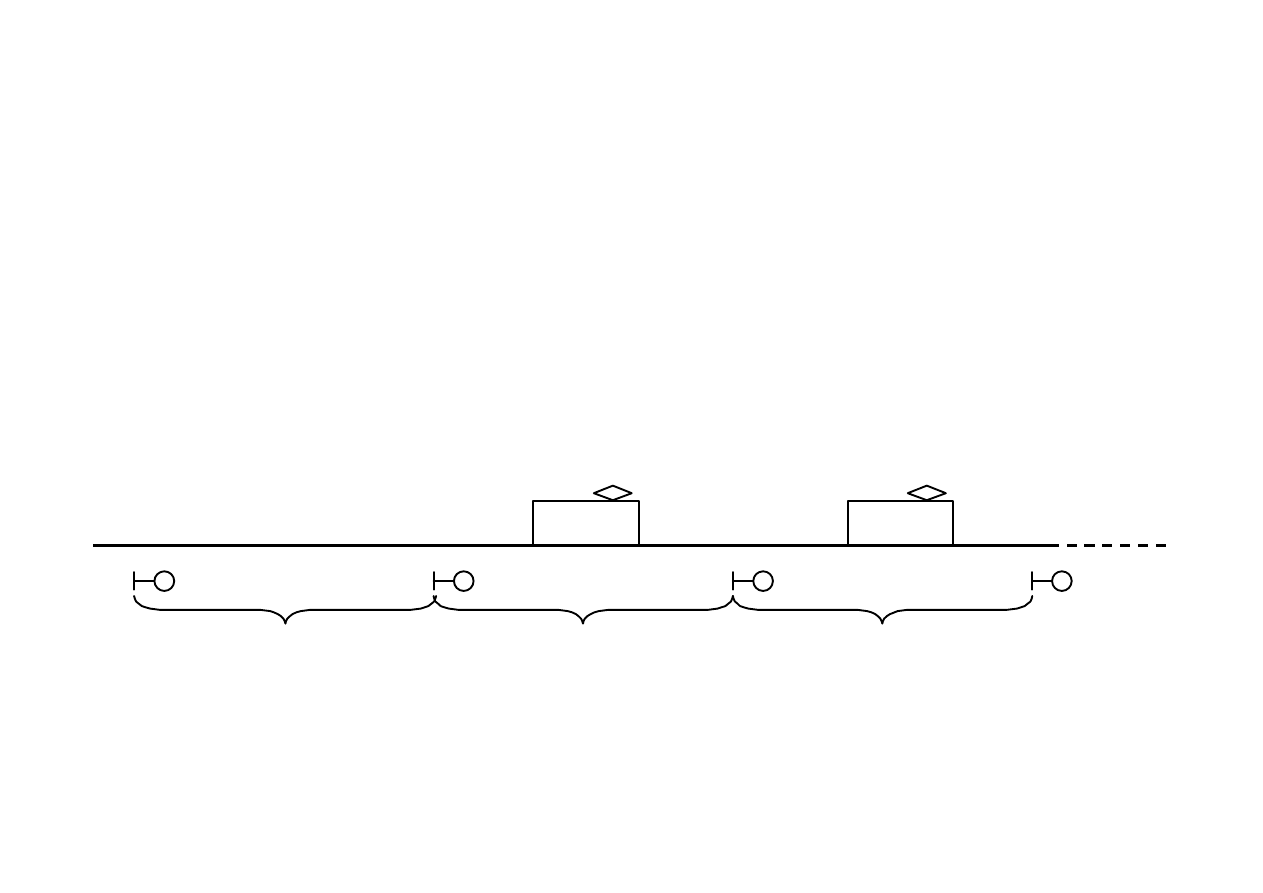
II
odstęp blokowy (i - 1)
odstęp blokowy i
odstęp blokowy (i + 1)
I
Zasada bezpiecznego prowadzenia ruchu – jeden pociąg na odstępie
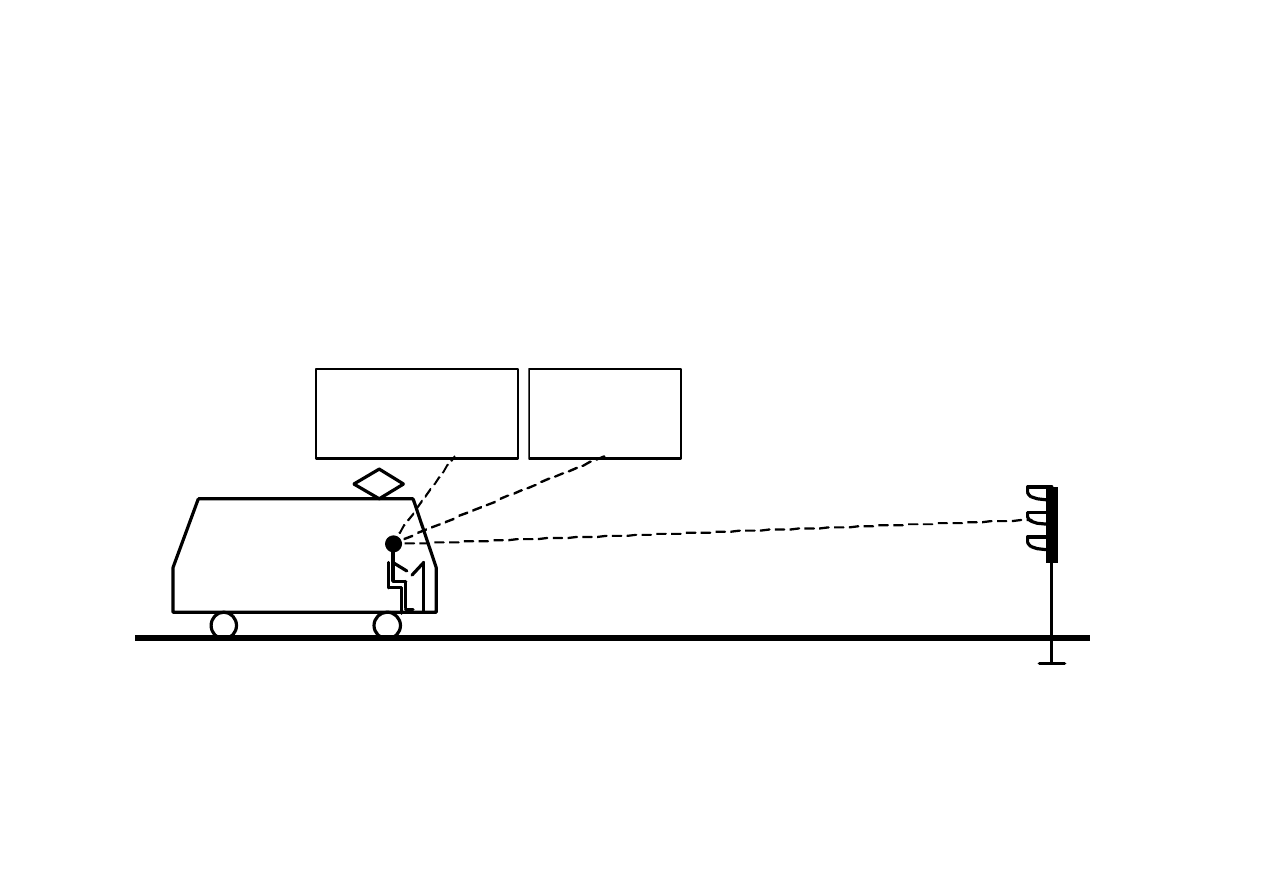
Pociąg jest prowadzony przez maszynistę, który w oparciu o obserwację linii, w
tym wskazania semaforów, rozkład jazdy i parametry pojazdu odpowiednio
dobiera prędkość pociągu tak, aby jazda odbywała się bezpiecznie, racjonalnie
i zgodnie z rozkładem jazdy i obowiązującymi przepisami. Z uwagi na
zawodność
człowieka, maszynista musi być
wspomagany w swoich
czynnościach.
służbowy
rozkład jazdy
parametry
pociągu
Ź
ródła informacji przy prowadzeniu pociągu przez maszynistę
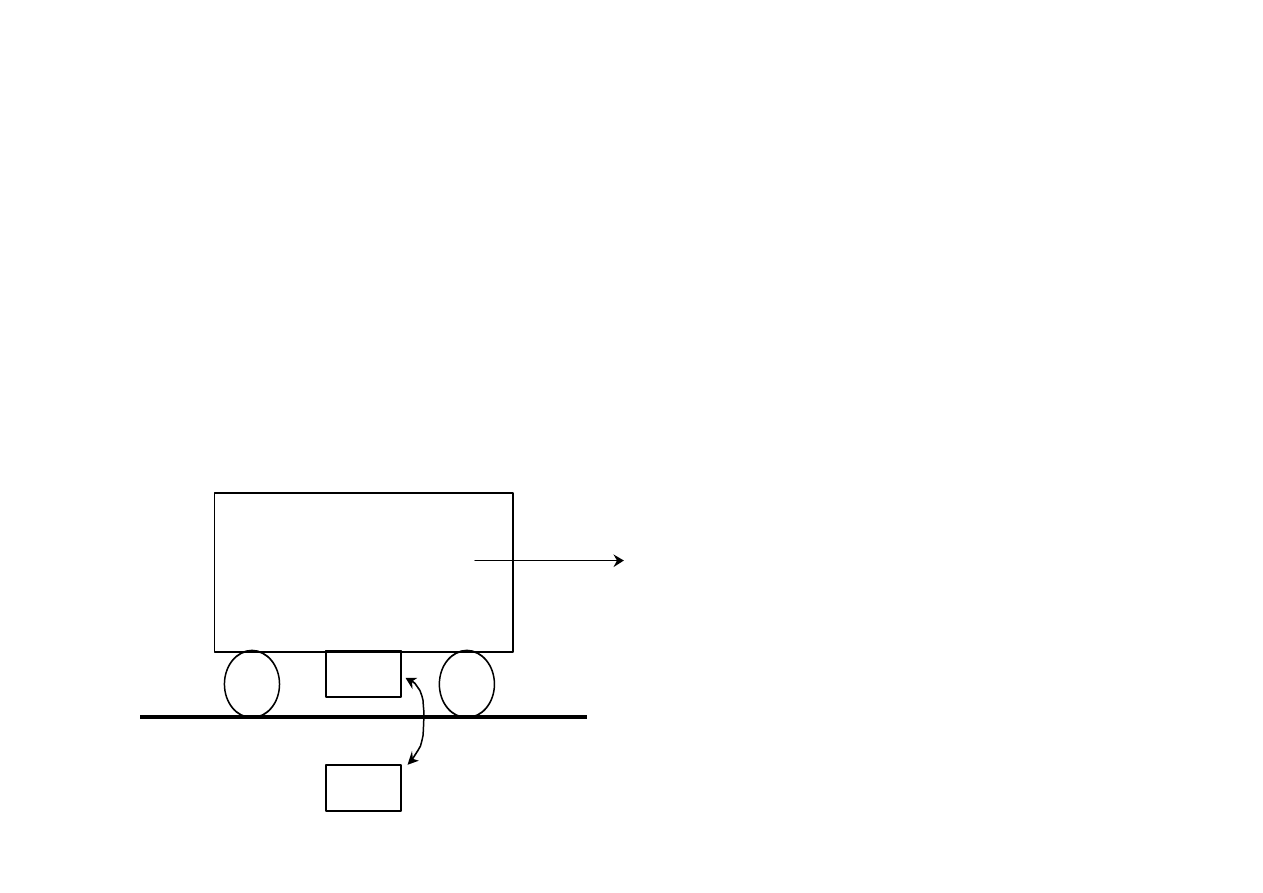
Najstarsze urządzenia wspomagające maszynistę w prowadzeniu pociągu były
instalowane przy torze obok semafora i gdy wskazywał on sygnał „stój”,
oddziaływały na urządzenia pojazdowe, które uruchamiały hamowanie nagłe
pociągu.
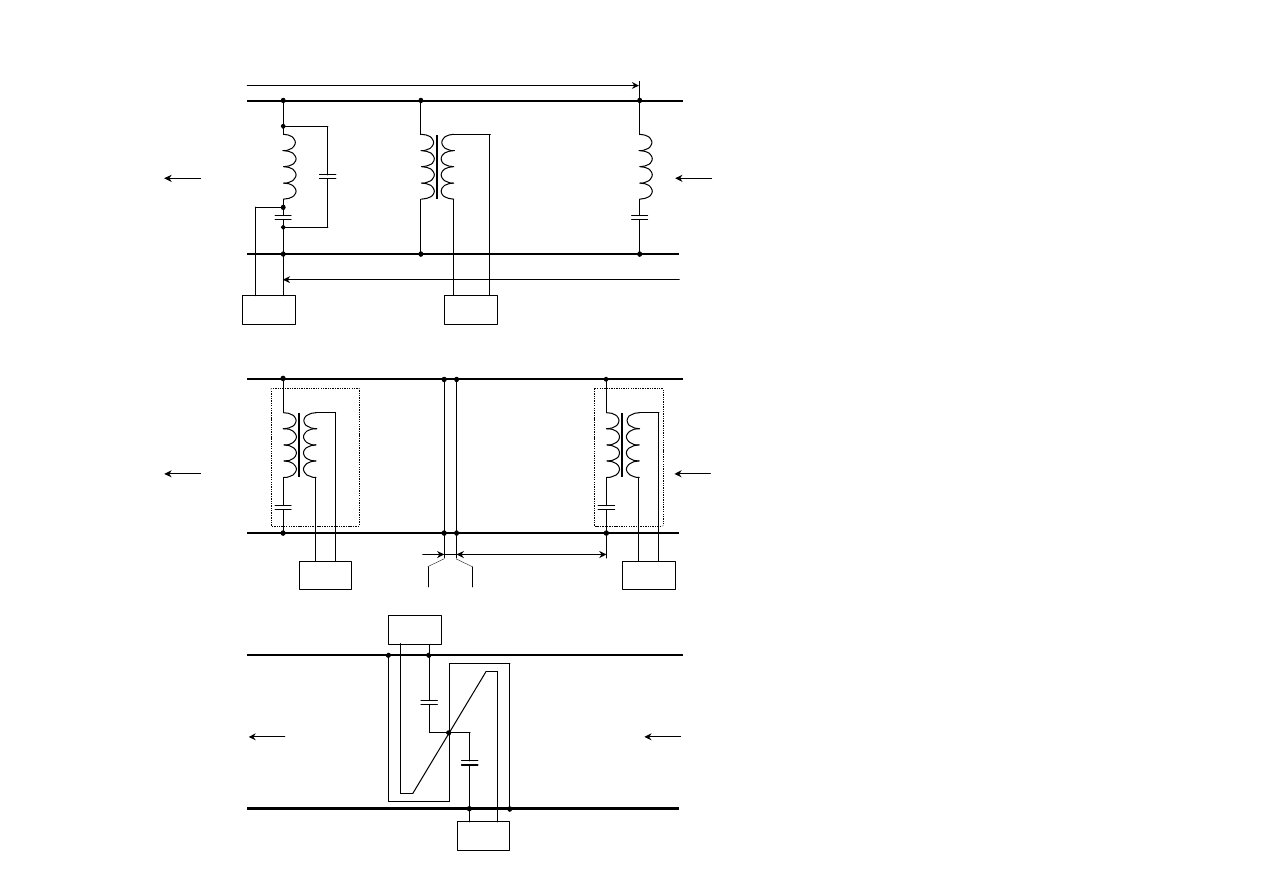
Jako urządzenia oddziaływania między torem a pojazdem stosuje się
urządzenia bezstykowego oddziaływania elektrycznego. Rozwój tych urządzeń,
poczynając od oddziaływania indukcyjnego prądu stałego, doprowadził do
szeroko stosowanych obecnie urządzeń oddziaływania indukcyjnego prądu
przemiennego, z obwodami rezonansowymi w torze i na pojeździe.
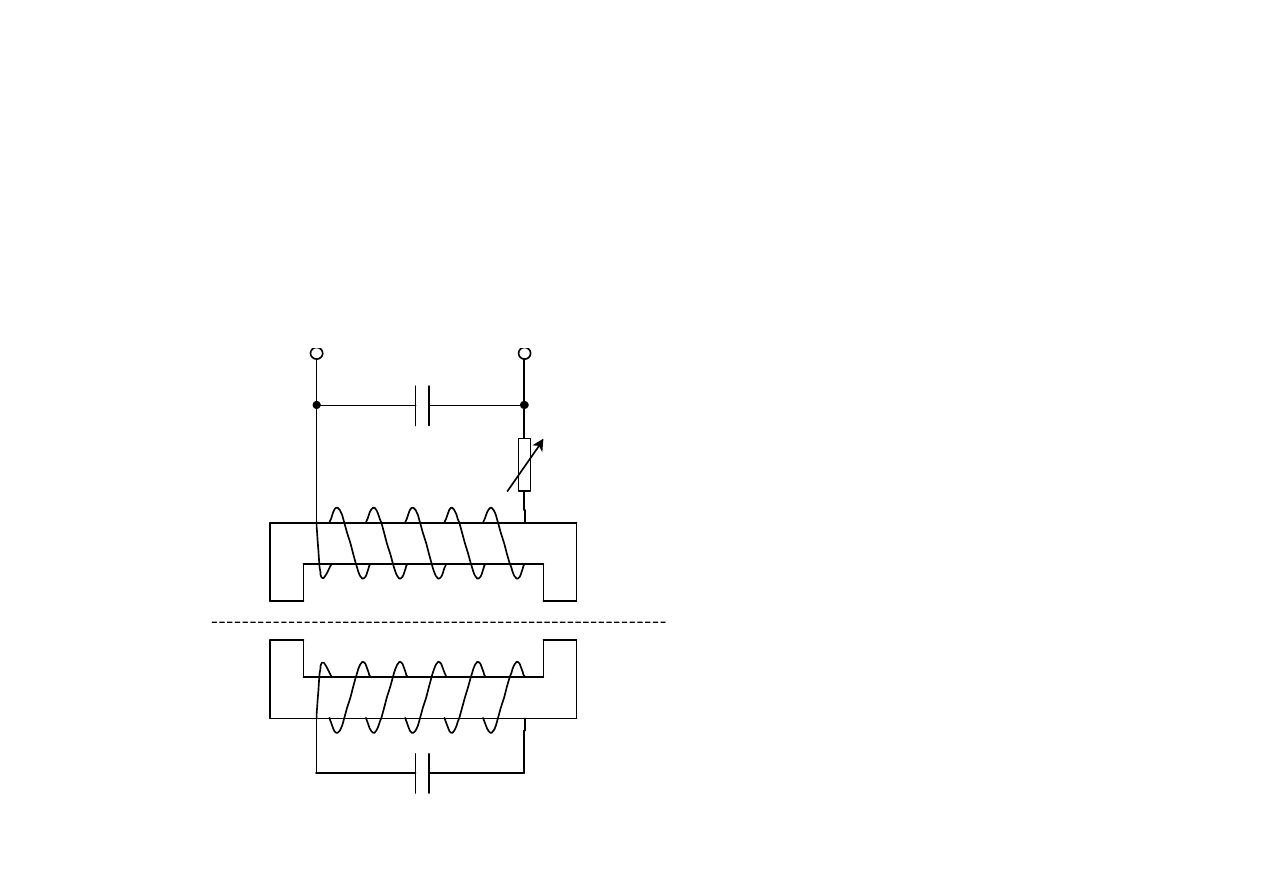
O
N
tor
V
sprzężenie magnetyczne
Nadajnik N i odbiornik O
punktowego przesyłania
wiadomości do poruszającego
się pojazdu
V
h
n
h
s
E
s
h max
f
czas na wciśnięcie
przycisku
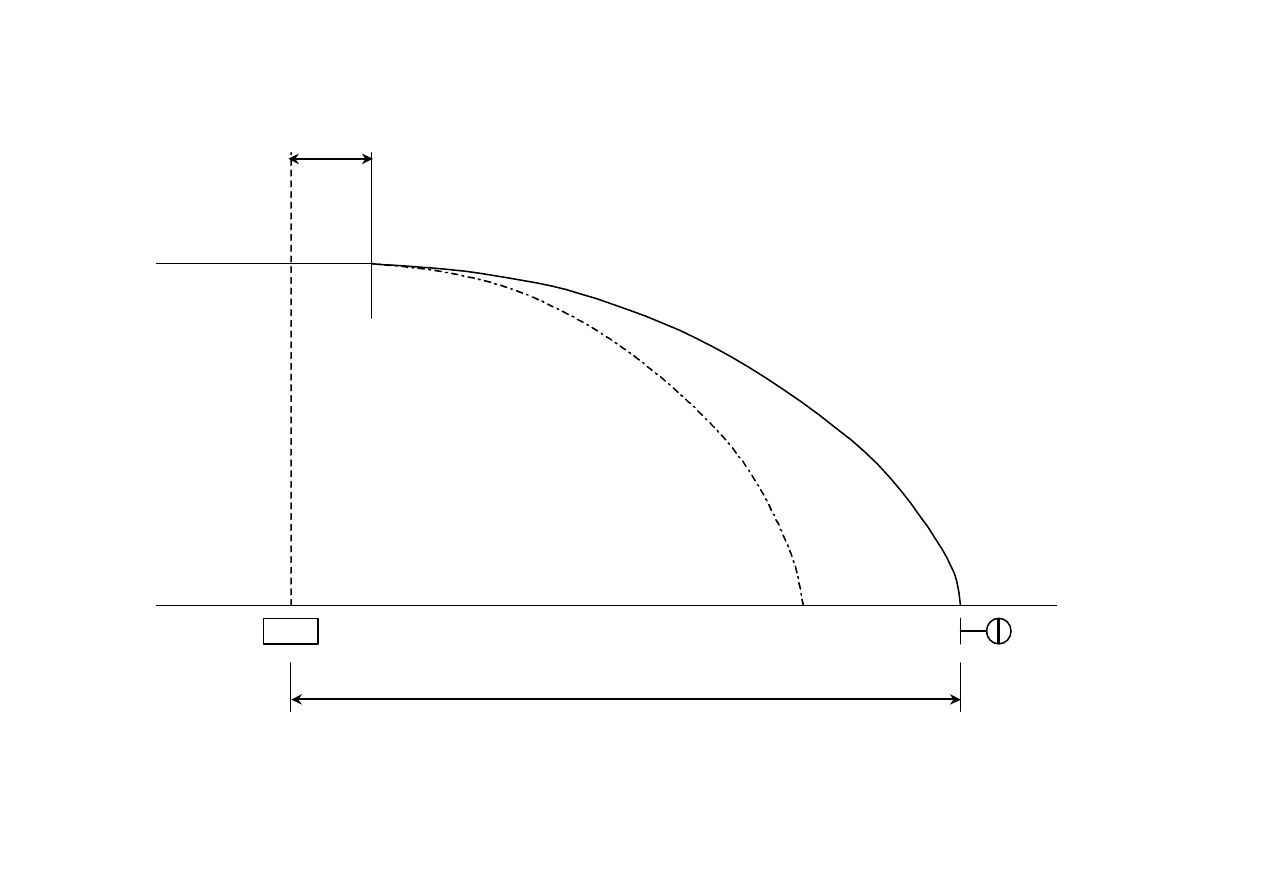
Jednopunktowe hamowanie pociągu przed semaforem z sygnałem „stój”
pojazd
tor
czujnik SHP
rezonator SHP
Na liniach PKP stosuje się jednopunktowe urządzenie samoczynnego
hamowania pociągu SHP bez uzależnienia od wskazań semaforów. Urządzenie
przytorowe SHP stanowi elektromagnes zwany rezonatorem SHP, który wraz
z kondensatorem tworzy obwód rezonansowy dostrojony do częstotliwości
1000 Hz. Czujnik, inaczej elektromagnes lokomotywowy, tworzy wraz z
kondensatorem obwód rezonansowy dostrojony do częstotliwości 1000 Hz.
Obwody rezonansowe
urządzenia SHP
Szyny kolejowe stanowią naturalnie istniejące w torze medium transmisyjne,
które może być wykorzystane do przesyłania wiadomości do pojazdu. Wymaga to
utworzenia obwodu nadawczego, w skład którego wchodzą szyny i odbiorczego
w postaci cewki - anteny na pojeździe.
Najprostszy sposób, od którego rozpoczęło się wykorzystanie szyn do ciągłego
przesyłania wiadomości do pojazdu, to wysyłanie informacji o sygnałach
wskazywanych przez semafory, w celu wyświetlenia ich w kabinie maszynisty na
tzw. sygnalizatorze kabinowym, stąd potocznie urządzenia te nazywane są
sygnalizacją kabinową
sygnalizator
kabinowy
prędkość maksymalna
dojazd do światła
pomarańczowego
dojazd do sygnału „stój”
semafory

Systemy automatycznego prowadzenia pociągu ATC
System automatycznego prowadzenia pociągu, w nazewnictwie anglojęzycznym
Automatic Train Control - ATC, tworzą dwa podsystemy:
-
system zapewniający bezpieczną jazdę, w nazewnictwie anglojęzycznym
Automatic Train Protection - ATP, inaczej system ochrony pociągu;
-
system automatycznej jazdy pociągu, w nazewnictwie anglojęzycznym
Automatic Train Operation - ATO.
Wprowadzenie systemów automatycznego prowadzenia pociągu ma na celu
zastąpienie maszynisty, w zależności od zakresu automatyzacji realizowanego
przez system, w niektórych, bądź w krańcowym przypadku we wszystkich
czynnościach. System automatycznego prowadzenia pociągu służy zapewnieniu
bezpiecznej i właściwej, a więc zgodnej z rozkładem jazdy i energooszczędnej
jazdy pociągu. Zadania systemu i jego podział wynikają z czynności, jakie
wykonuje maszynista przeprowadzając pociąg od stacji do stacji.

Podstawowym zadaniem systemu automatycznej ochrony pociągu ATP jest
automatyczne zmniejszanie prędkości pociągu do wartości gwarantującej
bezpieczną jazdę (a więc wartości mniejszej niż prędkość dopuszczalna
wynikająca z ograniczeń torowych i semaforowych), w przypadku gdyby
maszynista prowadził pociąg z prędkością od niej większą.
Zadaniami systemu ATO jest automatyczna regulacja prędkości pociągu
zapewniająca rozkładowy czas przejazdu pociągu między stacjami,
wymaganą precyzję zatrzymania pociągu na stacji (dotyczy to przede
wszystkim metra) oraz oszczędność zużycia energii.
Wprowadzając systemy automatyczne, w pierwszym rzędzie starano się
automatyzować funkcje związane z realizacją ograniczeń prędkości, decydujące
o bezpieczeństwie jazdy pociągu, pozostawiając maszyniście regulowanie
prędkości pociągu. W związku z tym system automatycznego ograniczania
prędkości ATP jest systemem podstawowym i może występować samodzielnie.
Zadaniem systemu ATP jest określenie dla danego pociągu w każdym punkcie
drogi s i w każdej chwili czasu t wartości prędkości bezpiecznej V
B
(s, t) i
zagwarantowanie, aby w każdym punkcie drogi s i każdej chwili czasu t prędkość
rzeczywista pociągu V
R
(s, t) była nie większa od wartości prędkości bezpiecznej:
V
R
(s, t) ≤ V
B
(s, t)
V
B
definiuje się ją jako największą prędkość, z jaką może jechać pociąg nie
stwarzając sytuacji niebezpiecznych, a więc największą prędkość, która
zagwarantuje
zrealizowanie
ograniczeń
prędkości
występujących
przed
pociągiem.
Zadaniem systemu ATO jest zastąpienie maszynisty w wykonywaniu czynności
związanych z przeprowadzeniem pociągu od stacji do stacji (włączanie i
wyłączanie silników trakcyjnych, włączanie i wyłączanie hamulców, regulacja siły
napędowej oraz regulacja siły hamowania. Automatycznie mogą być realizowane
niektóre bądź wszystkie fazy jazdy pociągu: rozruch, jazda z prędkością ustaloną,
jazda z rozpędu i hamowanie.
Zadaniem systemu ATO jest takie automatyczne sterowanie napędem i hamulcami
pociągu, aby w każdej chwili czasu t i drogi s prędkość rzeczywista pociągu V
R
była równa wartości prędkości zadanej V
Z
.
V
R
(s, t) = V
Z
(s, t)
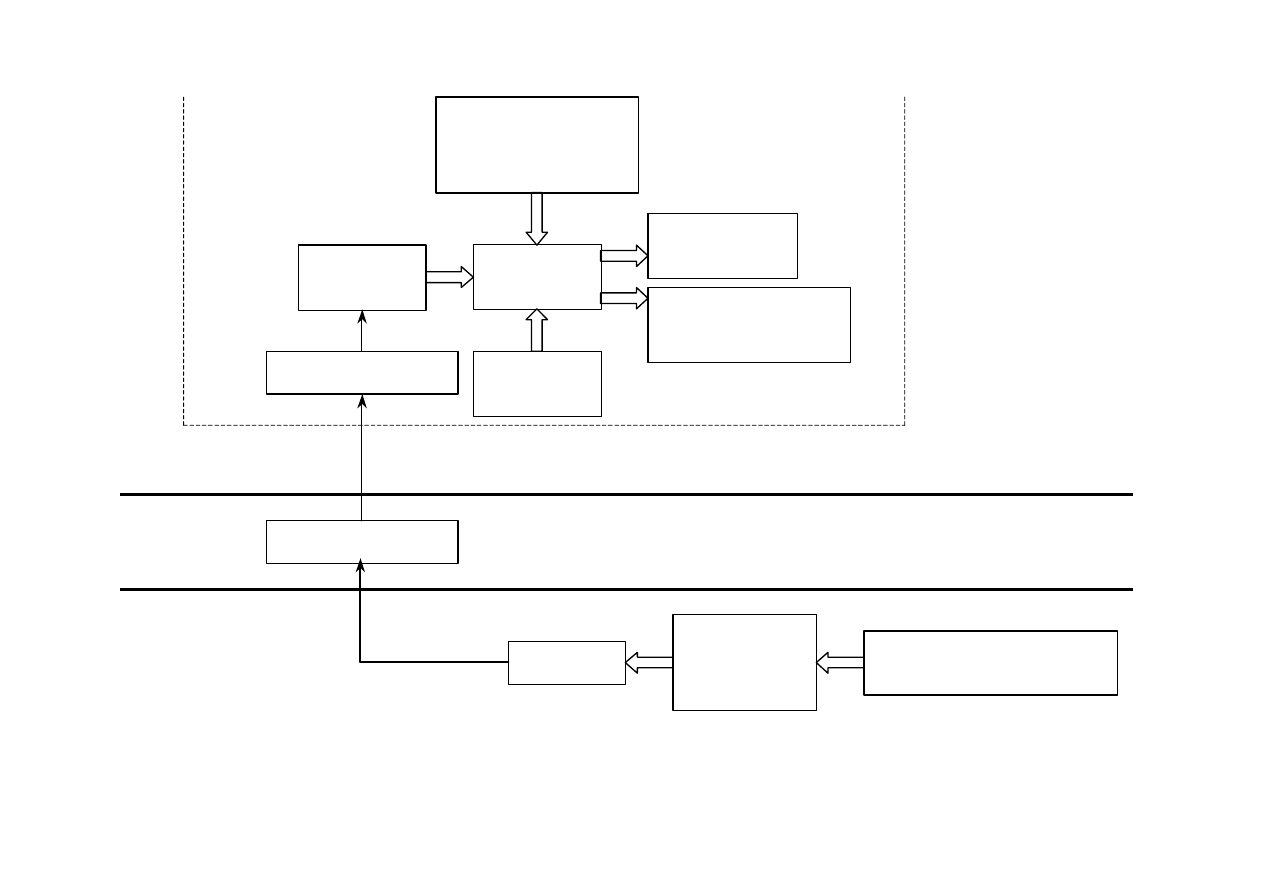
urządzenia
obsługiwane przez
maszynistę
jednostka
logiczna
urządzenia
pomiarowe
urządzenia
sygnalizacyjne
układy napędowo-
hamulcowe pociągu
odbiornik
transmisji
antena odbiorcza
obwód nadawczy
nadajnik
układ
przetwarzania
wiadomości
ź
ródła wiadomości
(głównie urządzenia srk)
tor
pojazd
Schemat blokowy systemu ATC
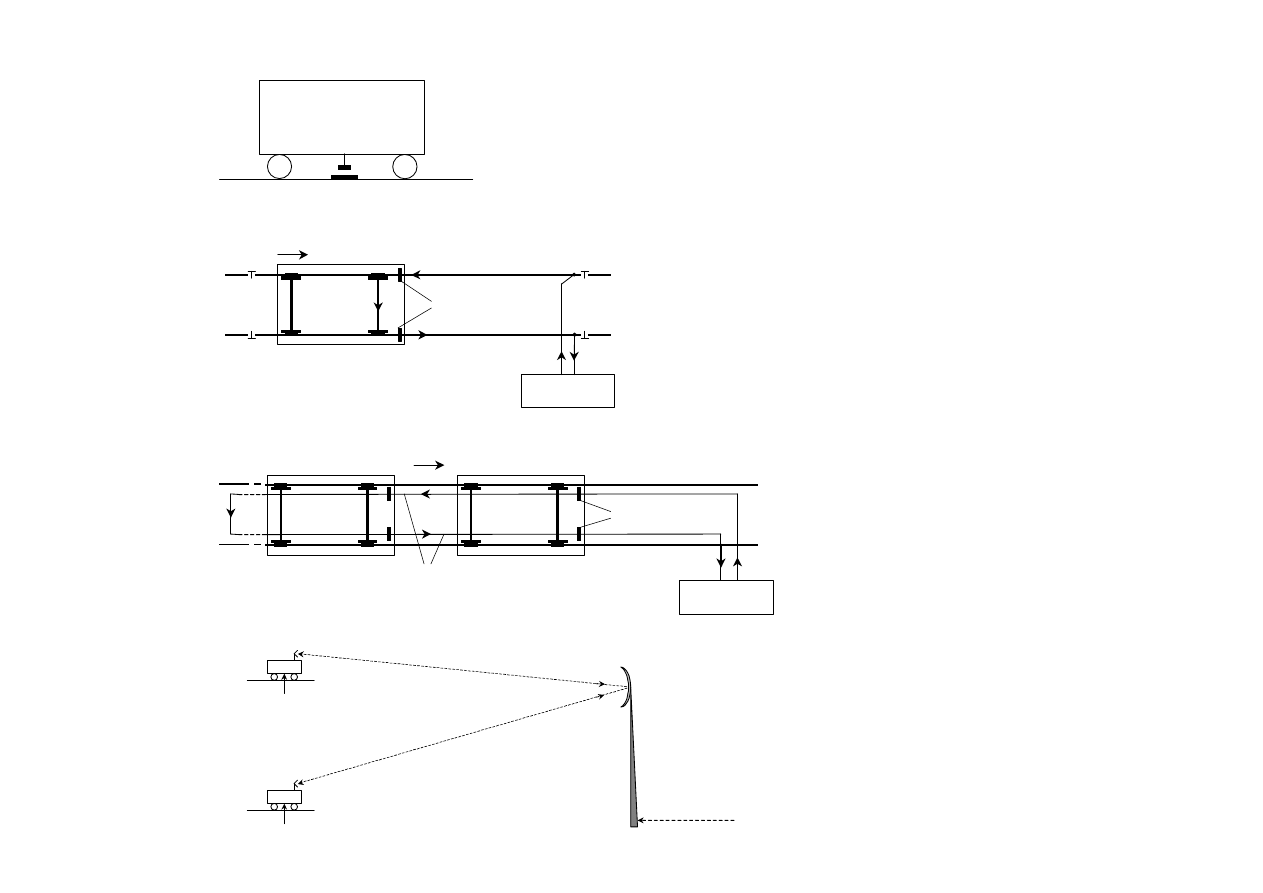
pojazd
a) balisa
b) antena pojazdowa
antena odbiorcza
a) transmisja punktowa - balisa
b)
a)
b) transmisja ciągła – obwód szynowy
nadajnik ATC
c) transmisja ciągła – obwód przewodowy
pojazd
antena odbiorcza
nadajnik ATC
pojazd
pętla przewodowa
d) transmisja ciągła za pośrednictwem fal radiowych
sb
i
tor
i
sb
j
tor
j
radiowa antena
nadawcza ATC
centrum
sterowania
Metody transmisji
informacji do pojazdu

Międzynarodowy Związek Kolei UIC od lat kieruje pracami mającymi
doprowadzić do ujednolicenia działania (interoperatywności) kolei w zakresie
zarządzania ruchem kolejowym i systemów automatycznego prowadzenia
pociągu. Celem podjętych na szeroką skalę działań jest opracowanie standardów
i wdrożenie do eksploatacji europejskiego systemu zarządzania ruchem
kolejowym ERTMS (European Rail Traffic Management System).
Częścią systemu ERTMS jest europejski system sterowania pociągiem ETCS
(European Train Control System). Jest to jednolity dla kolei europejskich
system ATC, zalecany do stosowania w poszczególnych krajach i z którym
powinny być kompatybilne istniejące krajowe rozwiązania. Stopniowe wdrażanie
systemu jak i dostosowywanie istniejących systemów do wymogów ETCS
ułatwiono, dzięki przyjęciu trzech poziomów rozwiązań urządzeń stacjonarnych i
pojazdowych,
różniących
się
stopniem rozbudowy i zaawansowania
technologicznego.
Do przekazywania informacji z toru do pojazdu system ETCS przewiduje
następujące media transmisyjne:
•balisy,
•kolejowy system radiowej transmisji cyfrowej GSM-R, zalecany przez UIC,
•pętlę przewodową (kabel promieniujący) jako uzupełnienie transmisji balisą.
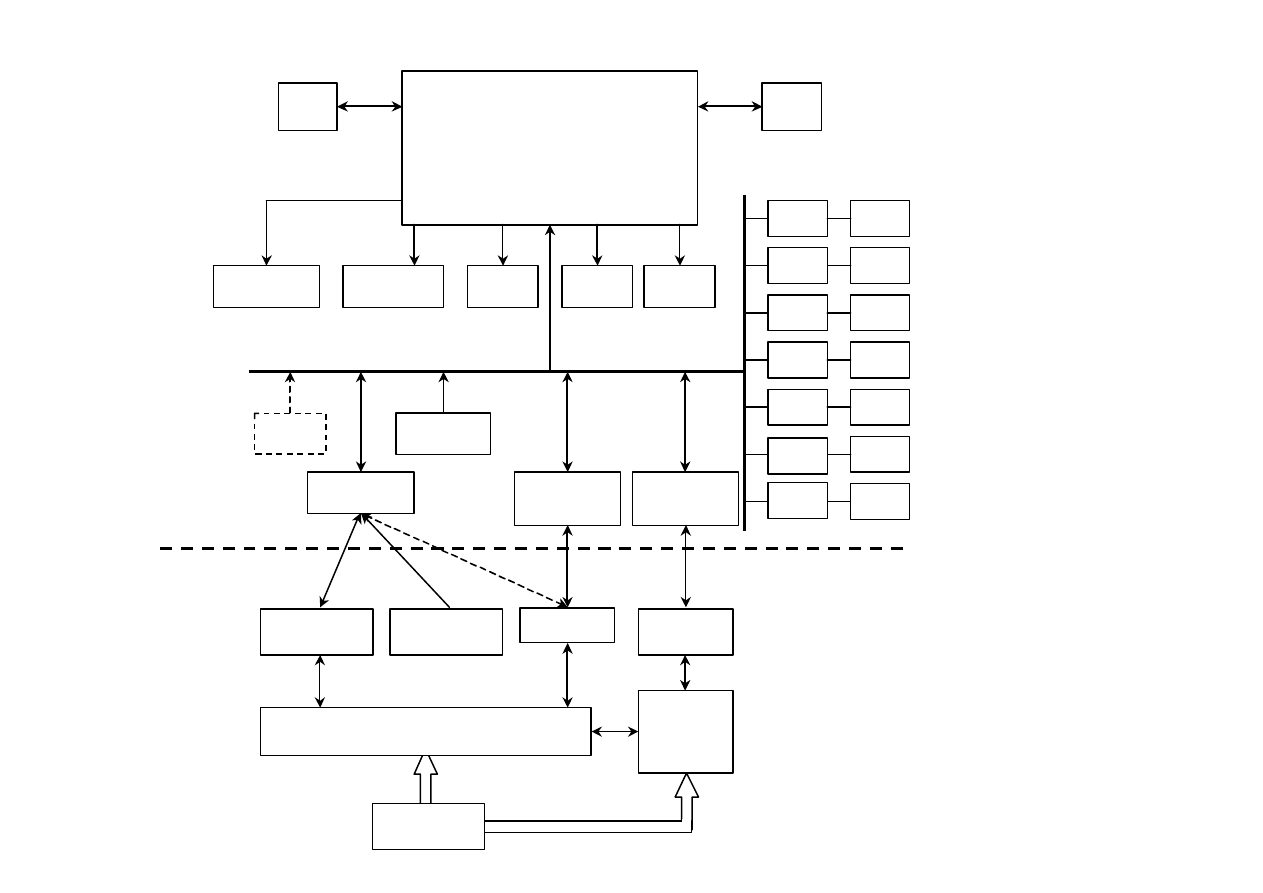
pojazdowa jednostka logiczna ETCS
komputer fail safe
EVC – Europen Vital Computer
komputer obsługujacy transmisję
MC – Maintenance Computer
MMI
kabina A
pulpit maszynisty
kabina B
pulpit maszynisty
hamowanie
nagłe
hamowanie
służbowe
napęd
diagno-
styka
rejestra-
cja
MMI
STM
LZB
TVM
STM
KVB
STM
TBL
STM
ZUB
BACC
...
magistrala danych ETCS-bus
TIU
odometry
antena
antena
GSM-R
urządzenia pojazdowe
urządzenia przytorowe
balisy
przełączalne
balisy
nieprzełączalne
europętla
GSM-R
radiowe
centrum
sterowania
RBC
ATP/ATC
STM
STM
STM
urządzenia
srk
Struktura systemu ETCS

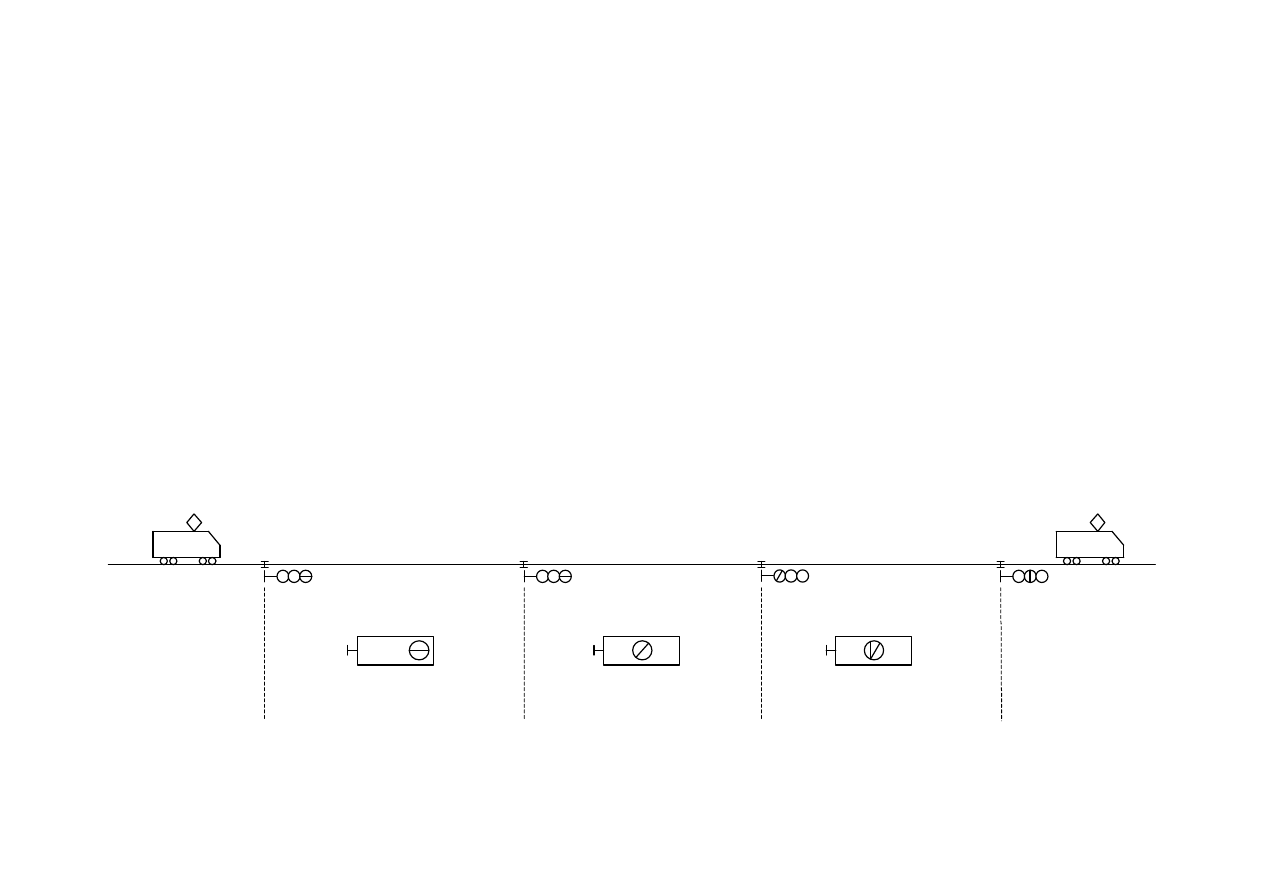
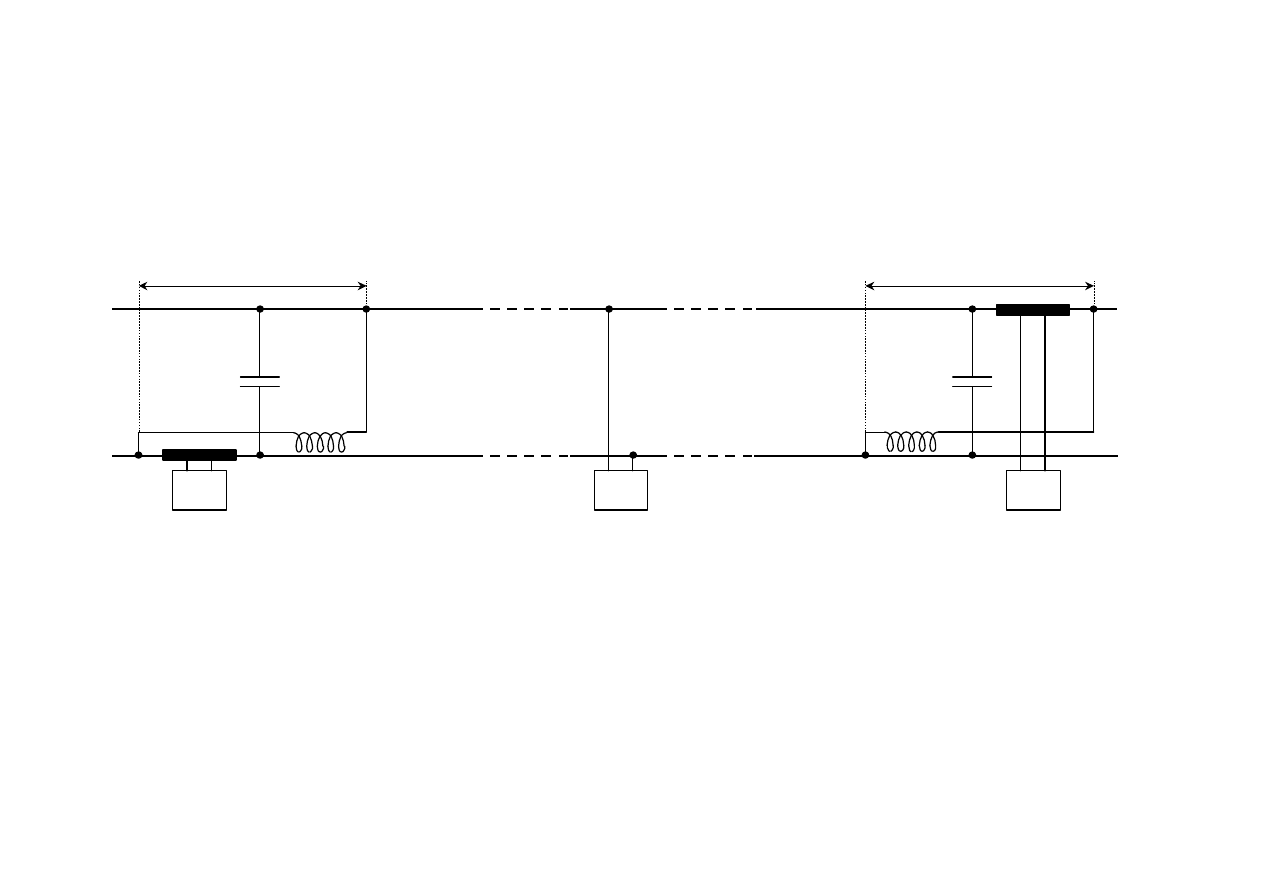
Metody i obwody wykrywania obecności pociągu na torze
Położenie pociągów na torze ustala się kontrolując stan niezajętości/zajętości
odcinków toru. Kontrola ta odbywa się za pośrednictwem obwodów torowych
lub liczników osi.
Obwód torowy to odcinek toru o odpowiedniej długości, odizolowany
elektrycznie od sąsiednich. Długość
obwodu torowego w warunkach
kolejowych jest rzędu 1 km i więcej, w metrze - kilkadziesiąt do kilkuset
metrów. Niezależnie od sposobu odizolowania jednego obwodu od drugiego,
zasada działania kontroli stanu zajętości toru jest taka sama. Na jednym końcu
obwodu umieszcza się źródło zasilania (nadajnik), na drugim - odbiornik. Gdy
obwód torowy jest wolny sygnał elektryczny z nadajnika dopływa do
odbiornika. Gdy w obrębie obwodu znajduje się pojazd, jego osie zwierają toki
szynowe i sygnał nie dociera do odbiornika.
W starszych, klasycznych obwodach torowych rolę elementów separujących
od siebie sąsiednie obwody pełnią tzw. złącza izolowane (przekładki izolacyjne
lub złącza klejone), w nowszych - specjalne układy elektryczne, tzw. złącza
elektryczne, które nie naruszają ciągłości mechanicznej szyn.
220 V, 50 Hz
220 V, 50 Hz
Klasyczny obwód torowy ze złączami izolowanymi
C
2
L
2
C
3
nad. f
1
Tr
odb. f
2
C
1
L
1
obwód o częstotliwości f
1
obwód o częstotliwości f
2
a)
Tr
nad. f
1
obwód
strojony f
1
0,75 m
b)
Tr
odb. f
2
obwód
strojony f
2
6 m
odb. f
2
f
1
c)
nad. f
1
f
2
f
1
f
2
f
1
f
2
Obwody separacji
w bezzłączowych
obwodach
torowych
N
01
~ 5 m
P
~ 5 m
02
P
Bezzłączowy obwód torowy SOT – 1
tor
czujnik osi
magistrala danych
jednostka
logiczna
przekaźniki
System zliczania osi
a
b
c
d
satelity
Centrum
sterowania
Pociąg 1
Pociąg 2
Określenie położenia pociągów z zastosowaniem GPS/GSM

System ATP zastosowany w metrze w Warszawie
W metrze w Warszawie zastosowany jest system SOP-2 (samoczynne
ograniczanie prędkości) opracowany przez Politechnikę Łódzką.
System SOP jest systemem ATP realizującym ograniczenia prędkości
wynikające z sytuacji ruchowej i warunków torowych w oparciu o schodkowy
przebieg prędkości bezpiecznej w funkcji drogi (stopnie prędkości).
Transmisja z toru do pojazdu obywa się za pośrednictwem obwodów
przewodowych ułożonych między szynami. Długość obwodu przewodowego,
którym przesyła się wartość stopnia prędkości pokrywa się z długością odstępu
blokowego, którym na ogół jest jeden obwód torowy.
Parametry transmisji są następujące:
•częstotliwość nośna 36,6 kHz,
•sygnał FSK z dewiacją ± 0,6 kHz,
• szybkość modulacji 1200 bodów.
a
c
b
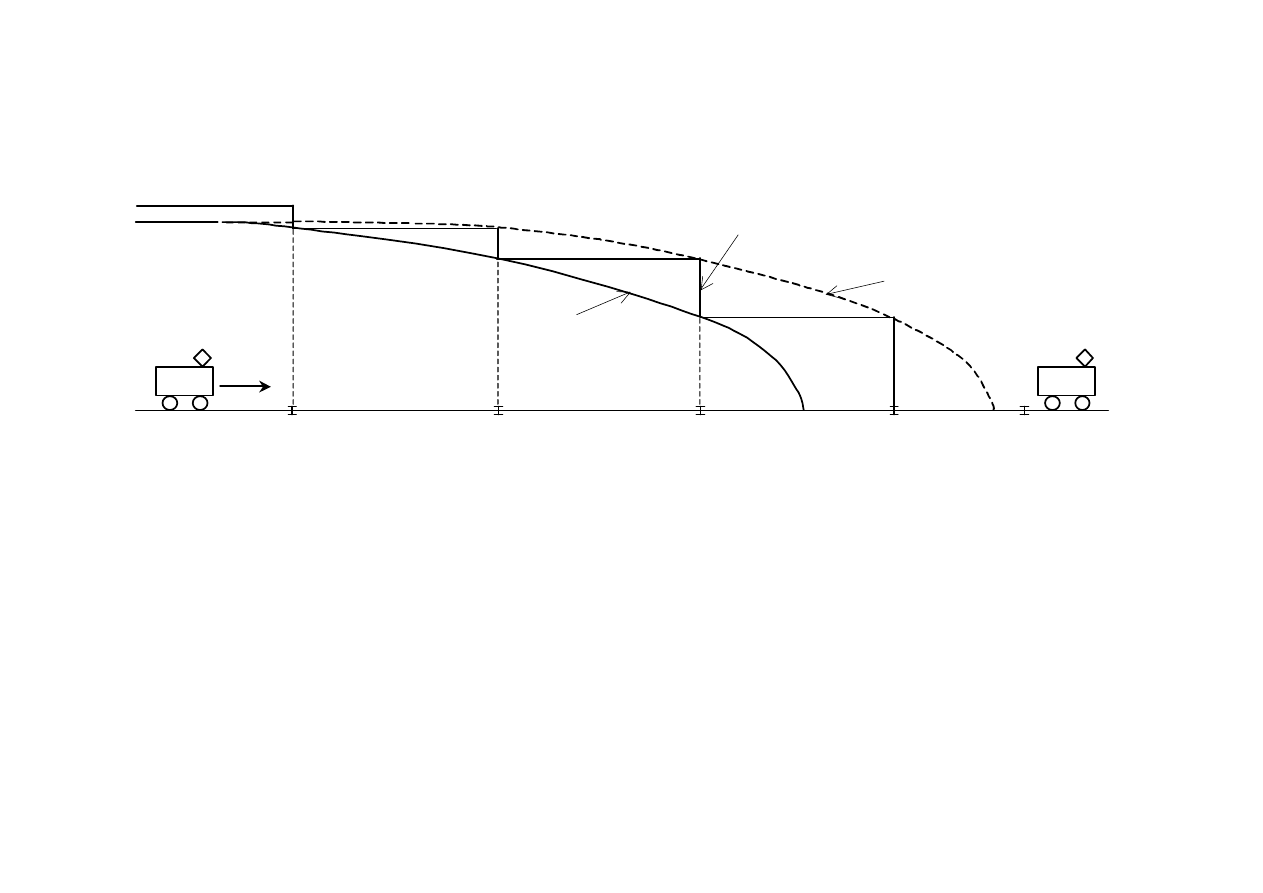
Dojazd pociągu do zajętego odstępu blokowego
a – obwiednia stopni prędkości na odstępach blokowych przed przeszkodą,
b – prawidłowy sposób prowadzenia pociągu przez maszynistę,
c – automatyczne zatrzymanie pociągu przez system SOP
Nadajnik
Nadajnik
Nadajnik
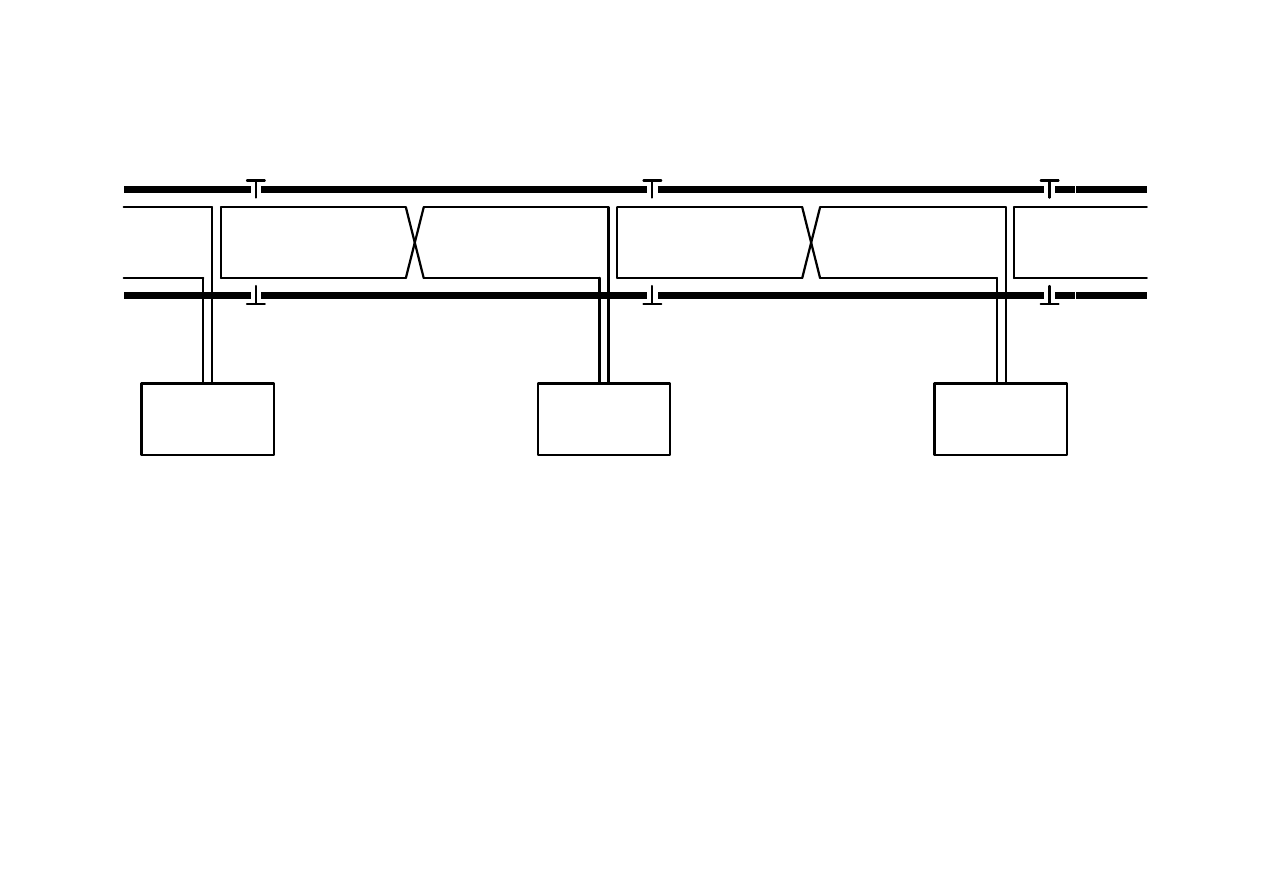
Usytuowanie w torze obwodów przewodowych systemu SOP
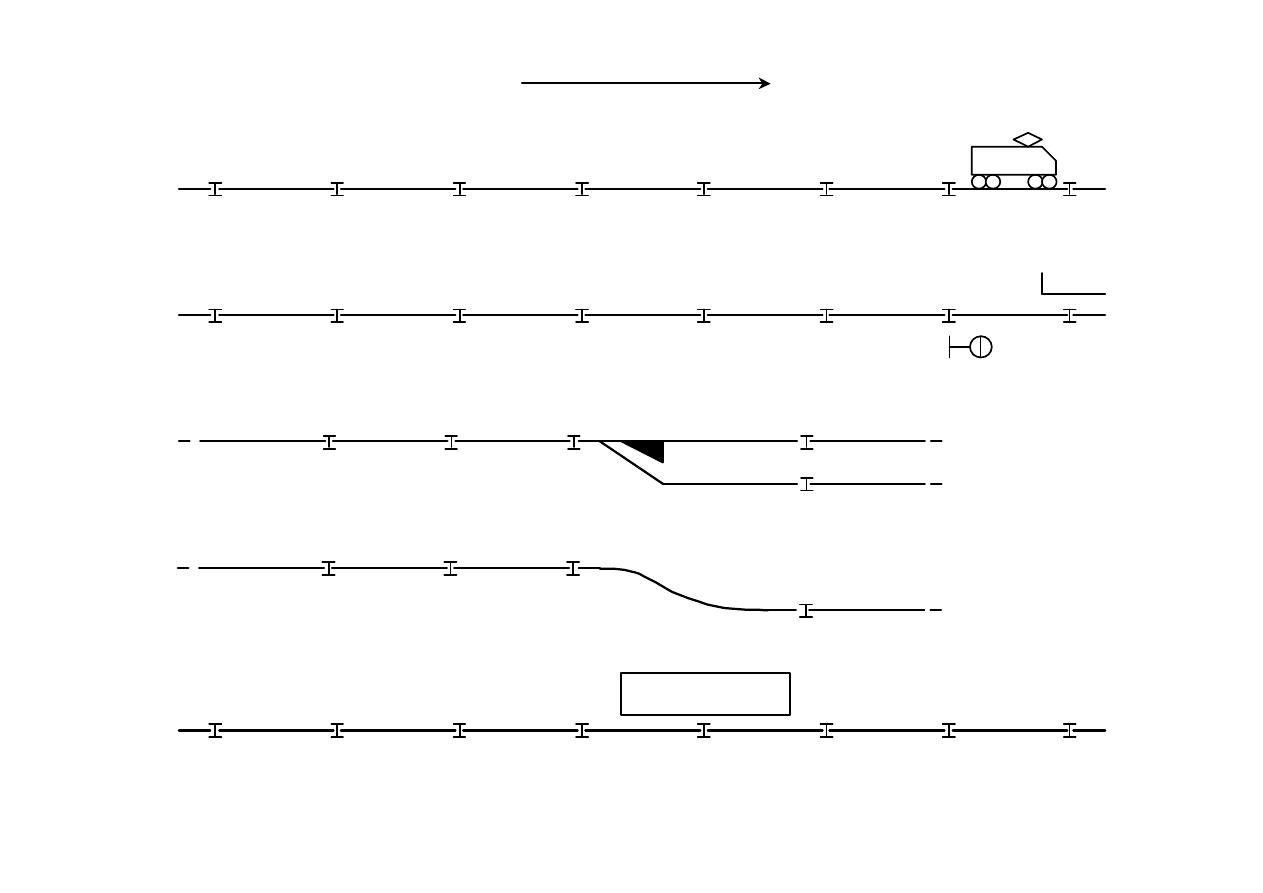
a)
b)
kierunek ruchu
85 km/h
85 km/h
76 km/h
58 km/h
35 km/h
0 km/h
85 km/h
85 km/h
76 km/h
58 km/h
35 km/h
0 km/h
Peron
58 km/h
76 km/h
58 km/h
35 km/h
35 km/h
35 km/h
85 km/h
76 km/h
58 km/h
58 km/h
85 km/h
c)
d)
85 km/h
85 km/h
76 km/h
58 km/h
58 km/h
85 km/h
85 km/h
peron
e)
Sekwencje stopni prędkości w systemie SOP – 2
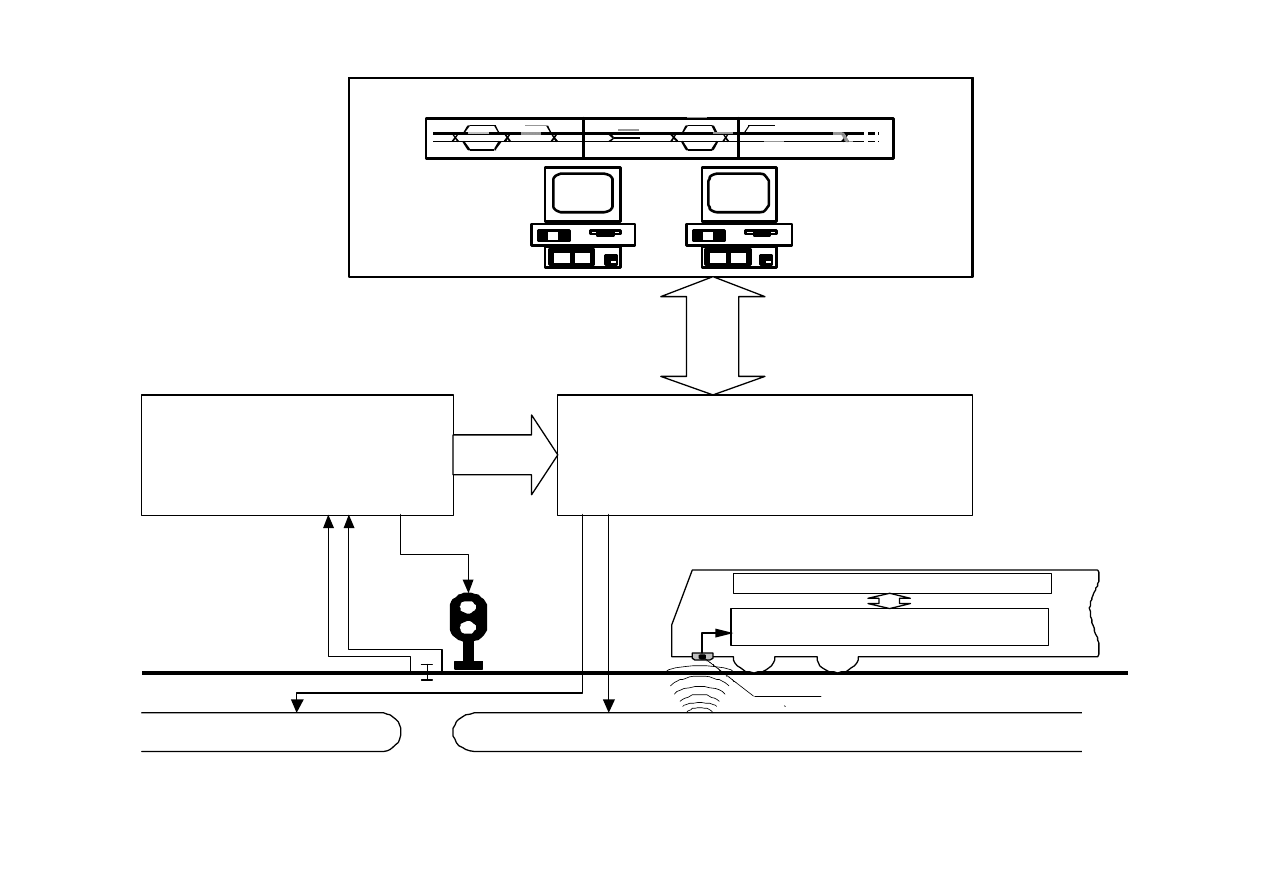
urządzenia srk
centrum dyspozytorskie
SOP:
urządzenia stacjonarne
SOP: urządzenia pojazdowe
SOP: przewodowy obwód transmisyjny
SOP: antena
obwody sterowania pociągu
Konfiguracja urządzeń systemu SOP
Wyszukiwarka
Podobne podstrony:
Microsoft PowerPoint Wyklad 1 Wstep do informatyki i
Microsoft PowerPoint Wyklad 2 Wstep do informatyki i
Microsoft PowerPoint WYKŁAD1 KOS 07(2)
Microsoft PowerPoint Reguły priorytetu w sterowaniu pr odukcją małoseryjną
Microsoft PowerPoint Wyklad 1 Wstep do informatyki i
Microsoft PowerPoint Wyklad 2 Wstep do informatyki i
Microsoft PowerPoint Wykład 6 Obliczenia trakcyjne
Microsoft PowerPoint Sterowanie produkcją MRP ZiP 20 07
Sterowanie Ruchem Kolejowym I materiały do wykladu(2)
Microsoft PowerPoint Infrastruktura transportu drogowego wykład7
(Microsoft PowerPoint Podstawowe poj 352cia dotycz 271ce komunikowania si 352 nauka o zdrowiu)
Microsoft PowerPoint Strategie finansowe i inwestyc firm wyklad 2
Microsoft PowerPoint TI wykład 2
więcej podobnych podstron