E
Elle
ek
kt
to
or
r w
w E
Ed
dW
W
E
LEKTRONIKA DLA WSZYSTKICH 7/99
26
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
ELEKTOR w EdW
Układy LM3812/LM3813
pozwalają na precyzyjne po−
miary prądu niemal bez strat.
Każdy jest wyposażony w we−
wnętrzny bocznik o rezystan−
cji 0,004
Ω
(i współczynniku
t e m p e r a t u r o w y m
2600ppm/
o
C), dzięki czemu
nie wymaga dołączenia ze−
wnętrznego rezystora, nie−
zbędnego do zamiany prądu
na napięcie. Bocznik pomiaro−
wy stanowi część metalowej
ramki wyprowadzeń (tzw. ażu−
ru), na której w trakcie monta−
żu układu scalonego jest
umieszczana struktura pół−
przewodnikowa. Po zamknię−
ciu obudowy (zalaniu masą
plastyczną), większa część
ramki jest odcinana. Pozostają
końcówki
wyprowadzeń
i część centralna ażuru, która
w tym przypadku pełni rolę re−
zystora
pomiarowego.
LM3812 jest tzw. układem
high−side, co oznacza, że jego
bocznik pomiarowy jest włą−
czany pomiędzy dodatnim bie−
gunem zasilania i obciąże−
niem. LM3813 to układ low−si−
de – włączany pomiędzy ob−
ciążeniem i ujemnym biegu−
nem. Obydwa układy scalone
zawierają przetworniki analo−
gowo−cyfrowe typu delta−sig−
ma, które uśredniają mierzoną
wartość w czasie 50ms (tryb
precyzyjny), względnie 6ms
(tryb szybki) i w ten sposób
skutecznie tłumią krótkie im−
pulsy (szpilki) prądowe. Prze−
tworniki dostarczają dokładne−
go
sygnału
wyjściowego
o modulowanej szerokości im−
pulsów (PWM), który zawiera
informacje o natężeniu oraz
kierunku prądu i może zostać
łatwo przetworzony przez każ−
dy mikrokontroler. Maksymal−
ny błąd wynosi tylko ±2%
w temperaturze pokojowej.
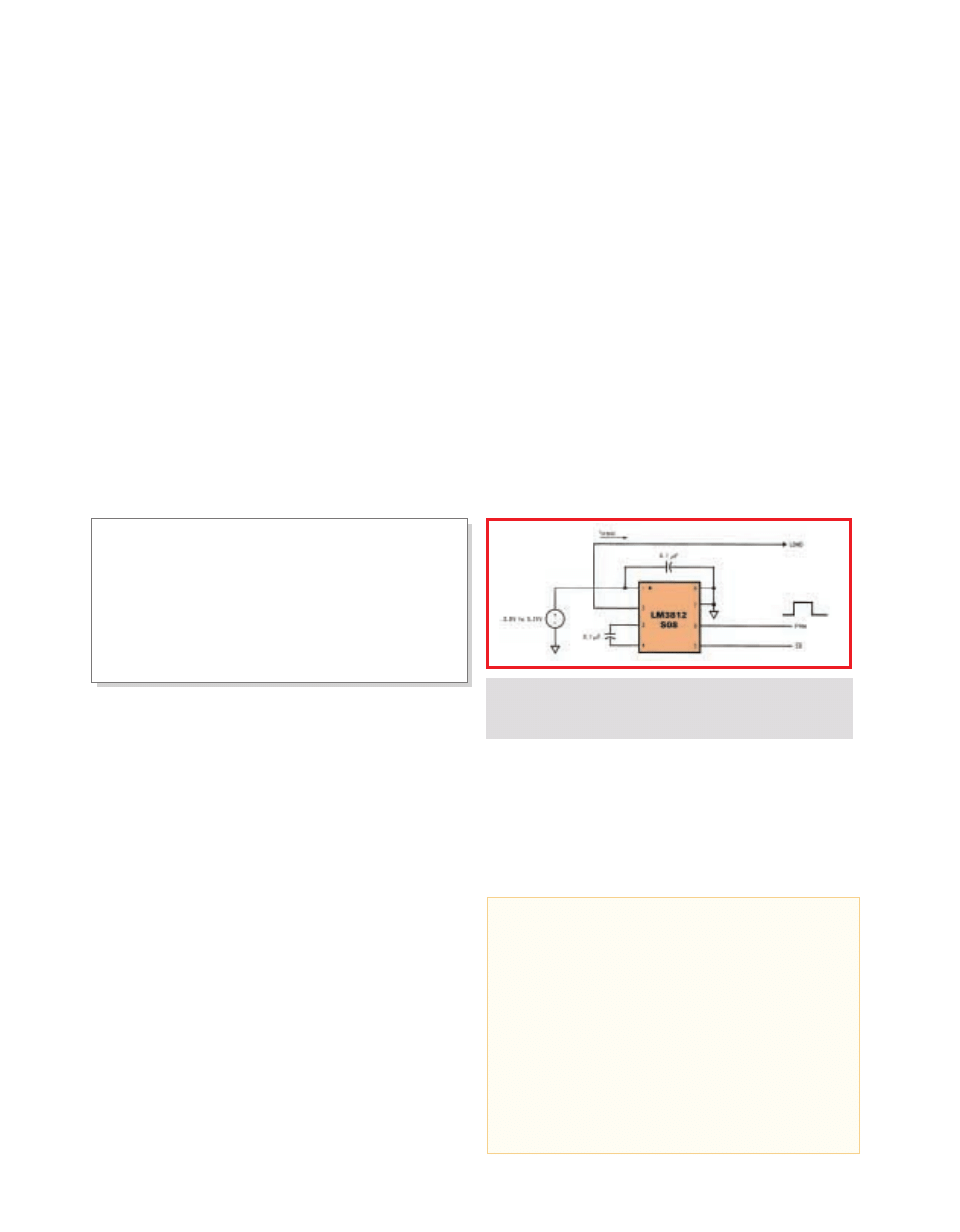
Układ aplikacyjny na rry
ys
su
un
nk
ku
u 1
1
wyraźnie pokazuje, że poza
dwoma kondensatorami nie
potrzeba żadnych elementów
zewnętrznych. Schemat dla
układu scalonego low−side
jest podobnie prosty.
Ten sposób działania ma
wiele zalet w porównaniu
z tradycyjnymi układami scalo−
nymi do pomiaru prądu, wy−
twarzającymi analogowe sy−
gnały wyjściowe, które przed
Pomiar prądu z użyciem
LM3812/LM3813
Precyzyjne układy pomiaru prądu z wyjściami cyfrowymi
D
Do
os
sttę
ęp
pn
no
oś
ść
ć p
prre
ezze
en
ntto
ow
wa
an
ne
eg
go
o u
uk
kłła
ad
du
u s
sc
ca
allo
on
ne
eg
go
o n
niie
e jje
es
stt g
gw
wa
arra
an
ntto
ow
wa
an
na
a.. O
Op
piis
s jje
es
stt o
op
pa
arrtty
y n
na
a d
da
an
ny
yc
ch
h p
prro
od
du
uc
ce
en
ntta
a,,
k
kttó
órry
yc
ch
h n
niie
e zzw
we
erry
yffiik
ko
ow
wa
an
no
o w
w lla
ab
bo
orra
atto
orriiu
um
m E
Elle
ek
ktto
orra
a p
po
od
d k
ką
ątte
em
m p
prrzzy
yd
da
attn
no
oś
śc
cii p
prra
ak
ktty
yc
czzn
ne
ejj..
Firma National Semiconductor wprowadziła do
sprzedaży dwa precyzyjne układy scalone przezna−
czone do pomiaru prądu – LM3812 i LM3813, które
mogą znaleźć zastosowanie we wskaźnikach stanu
naładowania akumulatorów, systemach diagno−
stycznych układów napędowych, układach pomia−
ru prądu wyjściowego zasilaczy albo jako reseto−
walne „inteligentne bezpieczniki”.
Właściwości
Bardzo mała rezystancja bocznika, 0,004
Ω
Zakres napięcia zasilania 2...5,25V
Błąd wtemperaturze pokojowej ±2% (LM381xPM−1.0)
Mały pobór prądu w trybie wyłączenia (shutdown), typowo 2,5µA
Niepotrzebny zewnętrzny bocznik
Wyjście PWM kompatybilne z mikrokontrolerami, przenoszące informację
o natężeniu i kierunku prądu
Precyzyjna technika delta−sigma
Szeroki zakres temperatur pracy
Do wyboru dwa czasy uśredniania (zależnie od wersji układu)
Do wyboru dwa zakresy prądu (zależnie od wersji układu)
Wewnętrzna filtracja
Wewnętrzny obwód resetu po włączeniu zasilania (Power−On−Reset)
Rys. 1. Podstawowa aplikacja LM3812. Wariant low−side jest
podobnie łatwy do zastosowania. Firmowa karta katalogowa opi−
suje także układy dla większych prądów i napięć.
E
Elle
ek
kt
to
or
r w
w E
Ed
dW
W
27
E
LEKTRONIKA DLA WSZYSTKICH 7/99
dostarczeniem do mikrokon−
trolera muszą zostać zewnę−
trznie przekształcone na po−
stać cyfrową. Błąd pomiarowy
wynikający z napięcia nie−
zrównoważenia wzmacniacza
wejściowego
tradycyjnego
układu, wpływu zakłóceń i to−
lerancji zewnętrznych rezysto−
rów jest trudny do skorygo−
wania. Poza tym sama zasada
działania
przetwornika
delta−sigma zapewnia wyeli−
minowanie
największego
składnika błędu przy pomia−
rach napięć w zakresie mikro−
woltowym, mianowicie wej−
ściowego napięcia niezrówno−
ważenia czujnika. Obydwa
układy scalone są fabrycznie
ustawiane na jeden z dwóch
zakresów
prądowych,
–1...+1A lub –7...+7A, i na
określony czas pomiaru –
50ms lub 6ms. Układy dyspo−
nują ponadto trybem wyłącze−
nia (shutdown), służącym do
eliminacji błędnych wyników
podczas włączania albo do
zmniejszenia poboru prądu
w stanie spoczynkowym.
W sumie jest osiem róż−
nych wersji układów, każda
umieszczona w
obudowie
SO8 (SMD). W ogólnym ozna−
czeniu LM381xYM−z.0 „x”
oznacza typ high−side (x=2)
lub low−side (x=3), „Y” infor−
muje o długim (Y=P) lub krót−
kim (Y=F) czasie uśredniania,
a „z” oznacza zakres prądowy
(z=1 dla ±1A, z=7 dla ±7A).
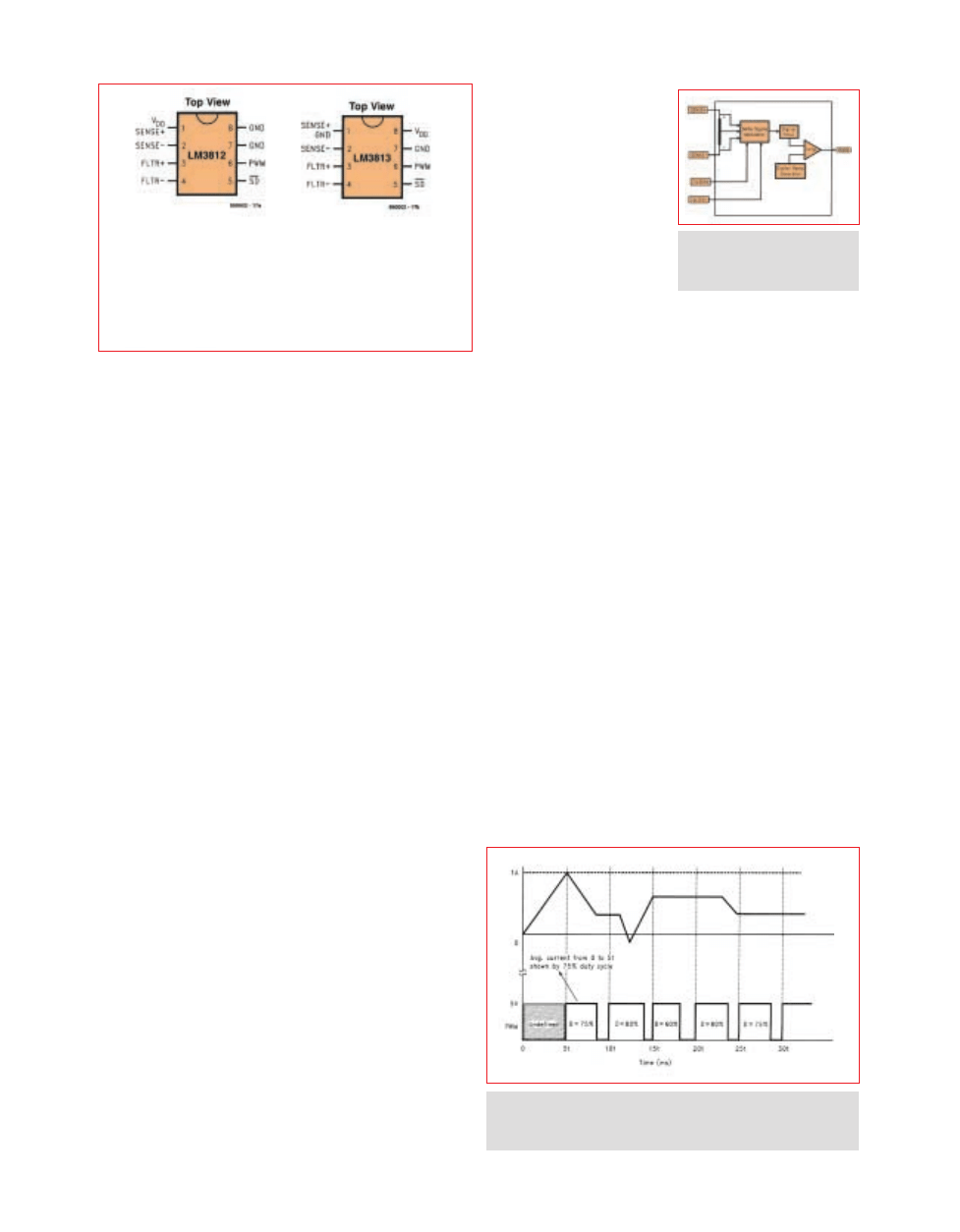
Schemat wewnętrz−
ny i funkcje
Prąd jest próbkowany
przez modulator delta−sig−
ma, jak to pokazuje rry
ys
su
un
ne
ek
k
2
2. Impulsy z wyjścia modula−
tora są cyfrowo filtrowane
i porównywane z sygnałem
cyfrowego generatora prze−
biegu piłokształtnego. Efek−
tem tego porównania jest
sygnał PWM.
Modulacja szeroko−
ści impulsów
Współczynnik wypełnie−
nia impulsów sygnału PWM
jest wprost proporcjonalny
do natężenia mierzonego
prądu. Sygnał PWM zależy
także od kierunku prądu.
Współczynnik wypełnienia
mniejszy od 50% oznacza,
że prąd płynie w “ujemnym”
kierunku. Wypełnienie po−
nad 50% informuje o prze−
pływie prądu “dodatniego”.
Symetryczny
sygnał
o współczynniku wypełnie−
nia 50% oznacza, że nie pły−
nie żaden prąd. Współczyn−
nik wypełnienia 95,5% (lub
4,5%) oznacza prąd maksy−
malny (dodatni lub ujemny).
Układ mierzy prądy od
–I
MAX
do +I
MAX
, czyli, w za−
leżności od wersji, z zakresu
±1A lub ±10A. R
Ry
ys
su
un
ne
ek
k 3
3
przedstawia związek między
dowolnym prądem i wyjścio−
wym sygnałem PWM.
Zależność między prądem
i współczynnikiem wypełnie−
nia opisuje formuła:
I
SENSE
= 2,2 • (D – 0,5) •
I
MAX
w której D jest współ−
czynnikiem wypełnienia sy−
gnału PWM a I
MAX
maksy−
malnym prądem (1A
lub
10A). Po przekształceniu
otrzymuje się wzór na
współczynnik wypełnienia:
D = [I
SENSE
/ (2,2 • I
MAX
)]
+ 0,5
Podany dla LM381x−7.0
maksymalny prąd 10A może
płynąć tylko przez 200ns.
Rys. 2. Obwody wewnętrzne
LM381x zbocz
nikiem i prz
e−
twornikiem delta−sigma.
Rys. 3. Związek między dowolnym (w tym przypadku dodatnim) prą−
dem wejściowym i współczynnikiem wypełnienia sygnału wyjścio−
wego.
1.
SENSE+
Górna strona (o wyższym potencjale) wewnętrznego czujnika prądu (w LM3812
łączona z V
DD
, wLM3813 z GND)
2.
SENSE–
Dolna strona wewnętrznego czujnika prądu
3.
FLTR+
Wejście filtru (zapobiegającego aliasingowi modulatora delta−sigma)
4.
FLTR–
Wejście filtru
5.
SD\
Wyprowadzenie wyłączania (shutdown). Przy normalnej pracy łączone z VDD poprzez
rezystor podciągający (pull−up). Gdy jest w stanie niskim, pobiera około 3µA prądu (wpływającego)
6.
PWM
Wyjście PWM (natężenie i kierunek prądu)
7.
GND
Masa
8.
GND/V
DD
Masa wprzypadku LM3812, V
DD
dla LM3813
E
Elle
ek
kt
to
or
r w
w E
Ed
dW
W
E
LEKTRONIKA DLA WSZYSTKICH 7/99
28
Ciągła praca jest możliwa
przy 7A.
Offset
Sygnał PWM niesie infor−
mację o 1024 poziomach
prądu w trybie precyzyjnym
i 128 w trybie szybkim. Z te−
go też powodu współczynnik
wypełnienia może się zmie−
niać tylko skokowo, co
1/1024 (1/128). Pomiędzy sy−
gnałem wejściowym i wyj−
ściowym
występuje
opóźnienie 0,5 cyklu kwanty−
zacji. W razie potrzeby błąd
kwantyzacji może zostać
skorygowany – po prostu
przez odjęcie 1/2048 (lub
1/256)
od
zmierzonego
współczynnika wypełnienia.
Bez korekcji, to dodatkowe
opóźnienie o połowę cyklu
odpowiada stałoprądowemu
offsetowi o wartości 1/2 bi−
tu, co w trybie precyzyjnym
oznacza 1,1mA dla układów
o zakresie 1A i 11mA dla we−
rsji 7−amperowych. W trybie
szybkim błąd jest ośmiokrot−
nie większy, czyli wynosi od−
powiednio 8,8mA i 88mA.
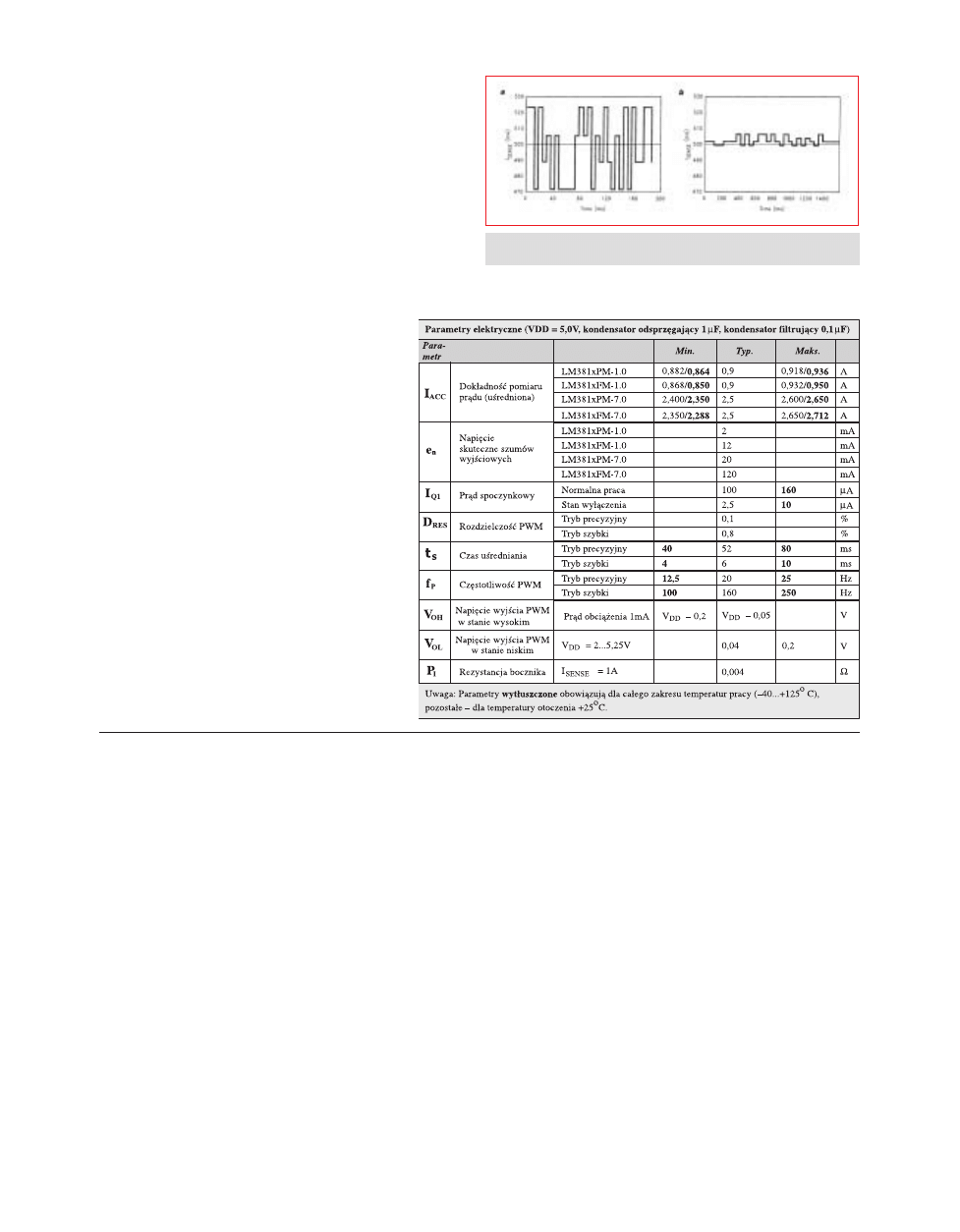
Tryb dokładny
a tryb szybki
R
Ry
ys
su
un
ne
ek
k 4
4 pokazuje typowe
zachowanie miernika prądu
±1A w trybie szybkim i precy−
zyjnym przy prądzie o natęże−
niu 500mA (szerokość impul−
sów jest przedstawiona bez−
pośrednio jako prąd). Porów−
nanie wykresów pokazuje, że
różnica między następującymi
jeden po drugim pomiarami
w trybie szybkim jest większa
niż w trybie dokładnym. Te
różnice przedstawiają się jako
zakłócające fluktuacje (jitter)
lub szumy w sygnale wyjścio−
wym
i
ostatecznie
odbijają się na dokładności
pomiaru. Aby błąd zminimali−
zować, trzeba uśre−
dnić więcej pomia−
rów. Dla przykładu,
uśrednianie w try−
bie szybkim da
w tym przypadku
wynik
497,5mA,
a w trybie precyzyj−
nym – 502,3mA. Te
wartości są bardzo
bliskie
wartości
w e j ś c i o w e j
500mA. Im więcej
pomiarów włączy
się do uśredniania,
tym dokładniejszy
będzie wynik.
Źrró
ód
dłło
o::
Karta katalogowa
„LM3812/LM3813
Current
Gauge
with Ultra Low
Sense
Element
and PWM Output”
( w w w . n a t i o −
nal.com).
Rys. 4. Typowe zachowanie wersji szybkiej (a) i dokładnej (b)
LM381x.
Wyszukiwarka
Podobne podstrony:
43 06 US Wentylacja i klimatyzacja
43 06 Produkcja i wbudowanie MMA
43-06-Produkcja i wbudowanie MMA
06 43 86
06 Analiza zaprawdę, zaprawdę w Ewangeliach Chrześcijańskich Pism Greckich PNŚ, w kontekście Łk#,
2002 06 43
06 1993 43 48
MT st w 06
Kosci, kregoslup 28[1][1][1] 10 06 dla studentow
06 Kwestia potencjalności Aid 6191 ppt
06 Podstawy syntezy polimerówid 6357 ppt
06
więcej podobnych podstron