

I N S T Y T U T E L E K T R O E N E R G E T Y K I
Z A K Ł A D U K Ł A D Ó W I S I E C I
E L E K T R O E N E R G E T Y C Z N Y C H
N A Z W A L A B O R A T O R I U M
P r o w a d z ą c y :
Dr inż. Andrzej Kwapisz
Podstawy modelowania ukladow automatyki w programach PSCAD,
T e m a t :
SciLab I Octave
D a t a w y k o n a n i a
N r ć w i c z e n i a :
01
1.12.2009
ć w i c z e n i a :
N r s t a n o w i s k a :
09
D a t a o d d a n i a
15.12.2009
s p r aw o z d a n i a :
G r u p a :
E1-2
W y k o n a ł :
1.
Jankowiak Paulina
Uwagi:
O c e n a :
2.
3.
4.
5.
6.
7.
8.
1 . C E L Ć W I C Z E N I A
Celem ćwiczenia jest zbadanie wpływu konstrukcji regulatora typu PID oraz metody doboru jego współczynników na jakosc regulacji, czyli uchyb i czas stabilizacji sygnału wyjsciowego.
2 . P R Z E B I E G Ć W I C Z E N I A
Tworzymy układ przedstawiający regulator PID za pomocą programu PSCAD oraz znajdujących się w nim bibliotek. Przyjmuję wzmocnienie o wortości 1 oraz stałych czasowych podanych przez prowadzącego (0.2[s], 0.4[s], 0.6[s] i 0.9[s]).
Schemat układu regulatora PID:

Transmitancja operatorowa:
G s =
1
10.2 [ s]10.4 [ s ]10.6 [ s ]10.9 [ s ]
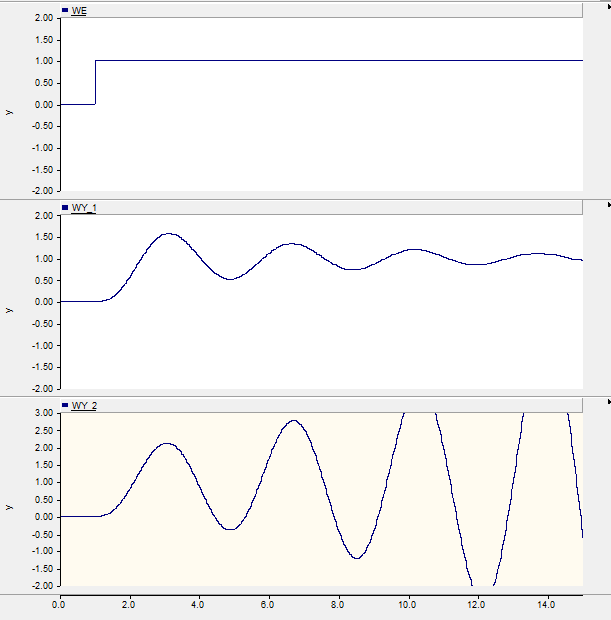
Po czasie równym 1s, dla wyżej podanych parametrów, pojawia się odpowiedź
skokowa na wejściu układu. Natomiast oscylacje na wyjściach, zwiększąją amplitudę, co jest charakterystyczne dla niestabilnych układów.



Przy zastosowaniu Metody Ziegler’a-Nichols’a, byłam w stanie określić wzmocnienie graniczne, a tym samym ustabilizować układ. Na poniższym schemacie, przy odpowiedzniej zmianie wartości wzmocnienia, udało mi się ustawić amplitudę regulatora na granicy stabilności.
Odczytuję z powyższego wykresu wartość dodatkowego opóźnienia T =1.31 [ s ]
0
Wartość nastawu jest równa K =5.23
kr
Korzystając z powyższej tabeli dla regulatora PID, na granicy stabilności, parametry przyjmują wartości:
K =0.6⋅ K =0.6⋅5.23=3.138
p
kr
T
1.31
T = 0 =
=0.655
i
2
2
T
T = 0= 1.31 =0.16375
d
8
8
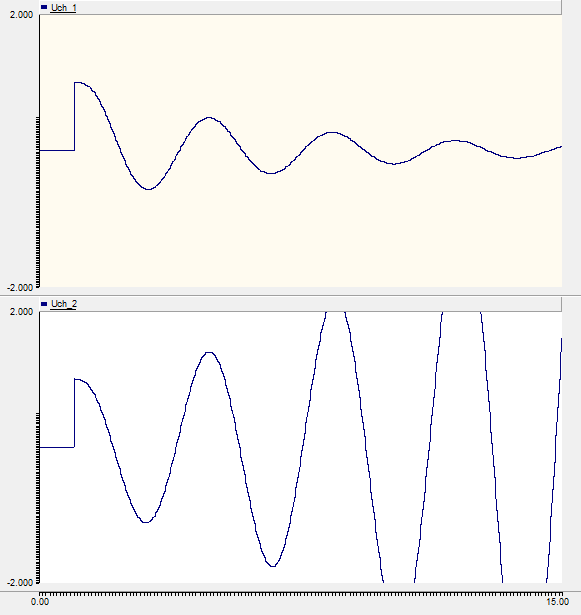
Otrzymane wyniki podstawiłam do układu pierwotnego.
Dobór parametrów regulatorów PID przy użyciu metody Ziegler'a-Nichols'a nie jest skomplikowane. Przy jej użyciu byłam w stanie wyznaczyć wzmocnienie Kp oraz czasy Ti (całkowania) i Td (różniczkowania). Jednakże pomimo moich starań oraz powtórnego zbadania danego układu, sygnału wychodzącego WY_2 jak i uchybu Uch_2 nie jestem w stanie doprowadzić do stanu stabilności.
Oświadczam, że Paulina Jankowiak jako autor sprawozdania z ćwiczeń laboratoryjnych, opracowanie to wykonałam samodzielnie nie korzystając z materiałów przygotowanych przez inne osoby w całości lub w części.
data, czytelny podpis
Wyszukiwarka
Podobne podstrony:
2 definicje i sprawozdawczośćid 19489 ppt
PROCES PLANOWANIA BADANIA SPRAWOZDAN FINANSOWYC H
W 11 Sprawozdania
Wymogi, cechy i zadania sprawozdawczośći finansowej
Analiza sprawozdan finansowych w BGZ SA
W3 Sprawozdawczosc
1 Sprawozdanie techniczne
Karta sprawozdania cw 10
eksploracja lab03, Lista sprawozdaniowych bazy danych
2 sprawozdanie szczawianyid 208 Nieznany (2)
Fragmenty przykładowych sprawozdań
Lab 6 PMI Hartownosc Sprawozdan Nieznany
Mikrokontrolery Grodzki Sprawoz Nieznany
biochemia sprawozdanie O (1)
Chemia fizyczna sprawozdanie (6 1) id 112219
201 sprawozdanie finansoweid 26953
Czarne orly sprawozdanie2
lrm sprawozdanie kck lab2
więcej podobnych podstron