CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
9.1.
Generowanie charakterystyk
9.2.
Zapas fazy i zapas modułu
9.3.
Przeregulowanie a zapas fazy
Czas regulacji a częstotliwość
9.4.
Logarytmiczne charakterystyki Bodego


9.1.
Generowanie charakterystyk częstotliwościowych Wprowadzenie
• Historia
1932 - Nyquist - badanie stabilności na podstawie charakterystyk częstotliwościowych 1942 - Bode - charakterystyki logarytmiczne i dobór wzmocnienia 1943 - Ziegler i Nichols – eksperymentalny dobór nastaw regulatorów PID po doprowadzeniu do oscylacji granicznych (granica stabilności)
• Cechy metod czę stotliwoś ciowych 1. Do projektowania służą charakterystyki częstotliwościowe a nie transmitancja, nie ma więc ograniczeń na rząd obiektu (inaczej niż w liniach pierwiastkowych) 2. Charakterystyki częstotliwościowe otrzymuje się eksperymentalnie za pomocą szybkiej transformaty Fouriera (FFT) pobudzając obiekt sygnałem o rosnącej częstotliwości
3. Uzupełnienie układu sterowania o filtry eliminujące zakłócenia nie komplikuje projektowania (inaczej niż w liniach pierwiastkowych) 4. Automatyczne strojenie metodą częstotliwościową daje lepsze rezultaty niż strojenie na podstawie odpowiedzi skokowej – gwarantowana stabilna praca 5. Metody częstotliwościowe są rozpowszechnione w pokrewnych dziedzinach – teoria sygnałów, telekomunikacja, elektronika.
- chirp
FFT – Fast Fourier Transform
moduł – M(ω) F(ω) - faza
Wady
-
Analiza i projektowanie odbywa się w dziedzinie częstotliwości a nie czasu. Nie występują więc wprost tak naturalne pojęcia jak stała czasowa, przeregulowanie, czas regulacji itp.
-
Nie można stosować najprostszego sposobu doboru nastaw jakim jest eliminacja stałej czasowej.
-
Opracowanie wyników eksperymentu częstotliwościowego i projektowanie wymaga pakietu CAD (w przypadku linii pierwiastkowych prostsze układy udało się projektować ręcznie – Siemens, Honeywell).
Instrukcje Matlaba
• w = logspace(d1,d2,n) - generowanie n punktów częstotliwości ω rozmieszczonych równomiernie w skali logarytmicznej w przedziale 10d1...10d2
w =logspace(d1,d2)
-
standardowo 50 punktów; np. logspace(-1,1) wygeneruje 50
punktów w przedziale 0.1...10
•
l
[M,F] = bode(l,m,w)
-
wyznaczenie modułu M i fazy F transmitancji dla
m
częstotliwości ω, gdzie F jest w stopniach (wyjątkowo w Matlabie)
• subplot(211)
-
wybór górnej połowy ekranu do umieszczenia wykresu semilogx(w,M), grid
-
wykres modułu w skali półlogarytmicznej
subplot(212)
-
wybór dolnej połowy ekranu
semilogx(w,F), grid
-
wykres fazy
clg
-
ekran standardowy (następny wykres pojedynczy).
• Zalecenia
1. W typowych problemach wystarczy 50 punktów na dekadę.
2. Przedział 10d1...10d2 powinien objąć częstotliwości charakterystyczne lub graniczne, którymi są odwrotności najmniejszej i największej stałej czasowej.
Transmitancja II rzędu
2
ω
G( s)
n
= 2
2
s + 2ξω s + ω
n
n
2ξω nω
j(− arctg
)
2
2
2
2
ω n ω
−
1
4
4
2
4
4
3
ω n
ω
G( s = jω) =
=
n
e
F(ω) - faza
2
2
2
2 2
2
− ω + j 2ξω nω + ω n
(ω n − ω ) + (2ξω nω)
1
4
4
4
4
2
4
4
4
4
3
M(ω) - moduł
Matlab
-
ω n = 1
l = 1
w = logspace(-1,1,100);
ksi = 1
m = [1 2*ksi 1]
[M, F] = bode(l,m,w);
subplot(211)

semilogx(w,M), grid
subplot(212)
semilogx(w,F), grid
ksi = 0.6
..............
ksi = 0.4
..............
ksi = 1.5
..............
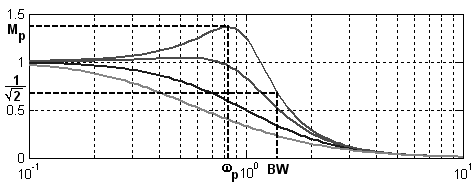
Uwaga. Częstotliwością charakterystyczną jest ω n = 1. Przedział 0.1...10 w logspace (-1,1,100) obejmuje ją po dekadzie z lewej i prawej strony.
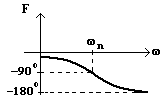
Wnioski
1. Wzrost tłumienia ξ powoduje
-
zmniejszenie modułu szczytowego Mp ( peak) i odpowiadającej mu częstotliwości ω p
-
zmniejszenie pasma przenoszenia BW ( band-width) 2. Częstotliwość ω p jest nieco niższa niż częstotliwość naturalna ω n = 1
3. Faza F ustala się na wartości -180°, ponieważ stopnie licznika i mianownika różnią się o 2 (2 ⋅ (−90o ) = 1
− 80o ) .
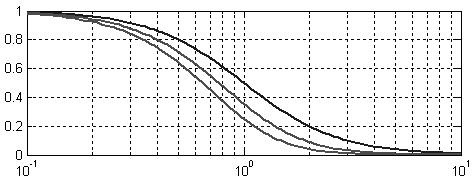
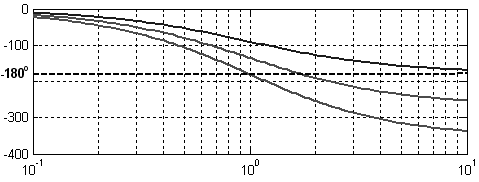
Wzrost rzędu a charakterystyki
1
1
1
G( s) =
,
,
2
3
4
( s + )
1
( s + )
1
( s + )
1
Matlab
l = 1
m = [1 2 1]
w = logspace(-1,1,100);
[M, F]=bode(l,m,w);
m1=[1 3 3 1]
[M1, F1]=bode(l,m1,w);
m2=conv(m,m)
[M2, F2]=bode(l,m2,w);
subplot(211)
semilogx(w,M,w,M1,w,M2),grid
subplot(212)
semilogx(w,F,w,F1,w,F2),grid
Wniosek. Ze wzrostem rzędu, a w zasadzie różnicy między stopniem licznika i mianownika zachodzi:
-
charakterystyka modułowa maleje coraz gwałtowniej
-
charakterystyka fazowa spada poniżej -180° (do o
( n
n
)
l −
)
m
⋅90

9.2.
Zapas fazy i zapas modułu
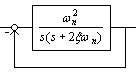
Serwomechanizm napięciowy
k
2
k
ω
G
( s)
T
n
=
=
=
,
otw
s( Ts + )
1
1
s( s + 2ξω )
s( s +
)
n
T
2
k
1
gdzie ω =
,
2ξω =
n
n
T
T
2
ω n
2
s( s + 2ξω )
ω
G
( s)
n
n
=
=
- standardowy układ II rzędu
zam
2
2
2
ω
s + 2ξω s + ω
1
n
n
n
+ s( s + 2ξω ) n
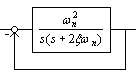
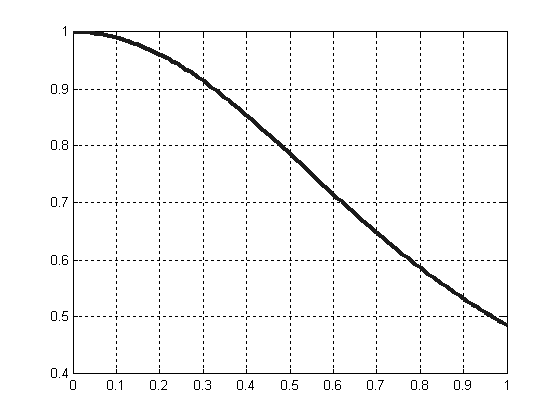
• Charakterystyki układu otwartego
2
2
ω
ω
ω
o
G
( s = j
n
n
(−90
arctan
)
ω
−
=
=
otw
)
e j
ξω
jω( jω + 2ξω )
2
2
2
n
n
ω ω + (2ξω n
1
4
4
4
2
4
4
4
3
)
1
4
4
4
2
4
4
4
3
F
M
Dane: ξ = ,
1
ω n = 1 (czyli p% = 0, tr = 4 ) Matlab
l = 1
m = [1 2 0]
w = logspace(-1,1,100);
[M, F] = bode(l,m,w);
subplot(211)
semilogx(w,M), grid
subplot(212)
semilogx(w,F), grid
[ w’
M
F ]
...........................
0.4863
0.9991
-103.6
ω1
≈1
F(ω1)


Definicja - zapas fazy
Niech M(ω), F(ω) będą charakterystykami częstotliwościowymi układu otwartego, a ω 1
częstotliwością, taką że M(ω1) =1. Zapasem fazy PM ( phase margin) nazywamy kąt określony wzorem
PM = 180o + F(ω )
1
Tok obliczeń:
G
( j
=
→
→ ∠
→
=
o + ∠
otw
ω ) 1
ω
G
( j
otw
ω )
PM
180
G
( j
otw
ω )
1
1
1
1
°
°
°
PM=180 -103.6 = 76.4
• Obliczenia „rę czne”
ω
( 9
− 0o
j
−arctg )
1
1
1
2
G
( s)
otw
=
,
G
(
otw jω) =
=
e
s( s + )
2
jω( jω + )
2
2
ω 4 + ω
ω : G (
otw
ω
j ) =1 → ω 4
2
+ω =1
4
→ ω + 4 2
ω −1= 0 → ω = 5 − 2 ≅ 4
.
0 858
1
1
0.4858
o
o
o
o
o
∠ G( jω ) = 9
− 0 − atan
= −103 6
.
→
PM = 180 − 103 6
.
= 76 4
.
1
2
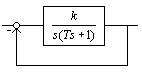
Układ III rzędu
• Okreś lenie kkr
k
( s + )
1 3
k
G
( s)
zam
=
= 3
k
s + 3 2
s + 3 s + k + 1
1 + ( s + )13
Hurwitz: 3 ⋅ 3 > k + 1 → k < 8, kkr = 8
Wybieramy np. k = 4, aby układ był stabilny.
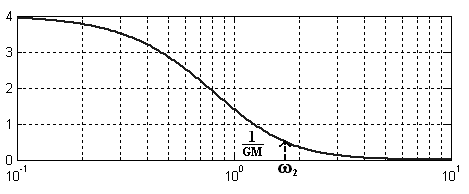
• Charakterystyki układu otwartego
Matlab
l = 4; m = [1 3 3 1];
w = logspace(-1,1,200);
[M, F] = bode(l,m,w);
subplot(211)
semilogx(w,M), grid
subplot(212)
semilogx(w,F), grid
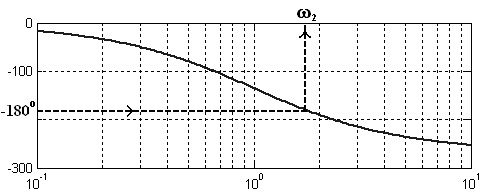
[ w’
M
F ]
...........................
1.722
0.5062
-179.59
ω2
≈1/2
-180°
Definicja - zapas modułu
Niech ω 2 będzie częstotliwością, taką że F(ω2) = -180°. Zapasem modułu GM nazywamy odwrotność modułu M(ω2), tzn.
1
GM = M(ω )2
1
Powyżej M ≅ , zatem GM = 2.
2
• Obliczenia rę czne
4
4
j( 3 arctgω)
G
(
otw jω
−
) =
=
e
3
3
( jω + )
1
2 2
1
( + ω )
ω −
ω = −
o
→ ω =
2:
3arctg( )
180
3
2
G
( j
GM = 2
otw
ω2 =
1
)
= 4 = 4 = 1
→
3
3
8
2
1
( + )
3 2
4 2
Uwaga. Zapas modułu mówi, ile razy należy zwiększyć wzmocnienie, aby osiągnąć granicę stabilności, tzn. k ⋅ GM = k .
kr
Z Hurwitza: kkr = 8 → 4 ⋅ 2 = 8
W typowych układach sterowania zapas fazy PM wynosi 40°...75°, a zapas modułu GM
od 2 do 4. Im którykolwiek zapas mniejszy, tym większa skłonność do oscylacji.
Zapas modułu rozważa się tylko wtedy, gdy różnica stopni licznika i mianownika transmitancji układu otwartego wynosi przynajmniej 3, albo gdy w układzie występuje opóźnienie. Tylko wtedy charakterystyka fazowa schodzi poniżej -180°.

9.3.
Przeregulowanie a zapas fazy. Czas regulacji a częstotliwość
• Układ II rzę du - serwomechanizm 2
ω
G
( s)
n
=
zam
2
2
s + 2ξω s + ω
n
n
ω2
ω
n
G
( ω) =
,
∠
( ω = −
o −
otw j
o
G tw j )
90
arctg
2
2
ξ
2 ω n
ω ω + ( ξ
2 ω n )
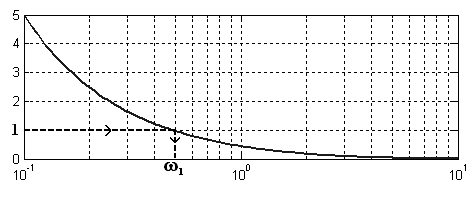
• Czę stotliwość ω 1
4
ω n
4
2
G
( j
otw
ω ) = 1
→
= 1
→
ω = ω
4
n
ξ +1 − 2ξ
1
1
2
2
2
ω [ω + (2ξω ) ]
1
1
n
Matlab
ksi = 0:0.01:1;
KW=ksi. * ksi;
w1=sqrt(sqrt(4*KW. *KW+1)-2*KW);
clg
- ekran z jednym wykresem
plot(ksi,w1), grid
Wniosek. Im większe tłumienie ξ tym niższa częstotliwość ω 1, dla której układ osiąga zapas fazy.
• Zapas fazy PM
ω
ξ
4 4 + 1 − ξ 2
PM = 180o + ∠ G
(
o
o
otw jω
2
) = 180 − 90 − arctan
1
= ° −
1
ξ
2 ω
90
arctan
n
ξ
2
Przeregulowanie a zapas fazy
Matlab
p%
ξ
PM
PM=90-atan(w1. /(2*ksi))*180/pi;
37.2
0.3
33.3
plot(ksi, PM, ksi, 100*ksi), grid
25.4
0.4
43.1
16.3
0.5
51.8
9.5
0.6
59.2
4.6
0.7
65.1
4.3
1/ 2
65.5
0
1
76.3
Wniosek. „Inżynierski” wzór PM ≅ 100 ⋅ξ jest dobrym przybliżeniem pełnego wzoru na zapas fazy PM, ale tylko dla przeregulowań nie mniejszych niż 10% ( ξ ≤ 0.6 ) .
ξ
4 4 + 1 − ξ
2 2
PM = 90° − atan
≅ 100 ⋅ξ
ξ
2
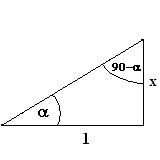
• Czas regulacji tr a ω 1
t α
g
= x = x
→
arctg x = α
1
1
1
tg(90o − α ) =
→
90o − α = arctg
x
x
1
90o − arctg x = arctg x
ω
2ξω
Ponieważ
PM = 90o − arctg
1
, więc również PM
arctg
n
=
albo
2ξω
ω
n
1
2ξω
1
tg
n
PM =
ξω = ω
ω
oraz
PM
n
tg
1
.
1
2
4
4
Czas regulacji:
t =
=
r
ξω
1
n
ω tg PM
1
2
8
8
t =
ω =
r
ω
lub
1
tg PM
1
t
PM
r tg
• Idea projektowania
Mając dane p% i tr za pomocą powyższych wzorów przechodzimy na PM i ω1
w dziedzinie częstotliwości.
Podobnie mając charakterystyki częstotliwościowe układu otwartego w dziedzinie częstotliwości wyznaczamy z nich PM i ω1. Na podstawie powyższych wzorów PM
określamy ξ ≅
, przeregulowanie p% i czas regulacji tr.
100
-
p% a ξ :
p%
−πξ
ln
2
100
1− ξ
p
= e
100 %,
ξ =
%
2
p% 2
π + | ln
|
100

9.4.
Logarytmiczne charakterystyki Bodego
Idea metody
- Bode – 1943, USA
jF ω
-
( )
G( jω) = M (ω) e
,
M
= 20log M (
- wartości w decybelach [dB]
dB
ω)
- Wykresy MdB(ω) dla ω w skali logarytmicznej są liniami prostymi lub łamanymi o dB
dB
standardowych nachyleniach, tzn. ,
0 ± 20
, ± 40
itd.
dek
dek
- Transmitancja złożona
jF
j( F + F + F )
G = 1
G G 2 G 3 = Me
= M 1 M 2 M 3
1
2
3
e
20 log M = 20log M + 20log M + 20 log M
1
2
3
M
= M
+ M
+ M
dB
,
1 dB
2, dB
,
3 dB
F = F + F + F
1
2
3
Wniosek. Charakterystyki logarytmiczne transmitancji złożonej tworzy się jako sumę charakterystyk transmitancji składowych (prostych).
Charakterystyki elementarne
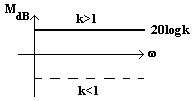
• Wzmacniacz
o
G( s) = k ,
j 0
G( jω) = k = k ⋅ e o
M dB = 20log k,
F (ω) = 0
• Całkowanie i róż niczkowanie
1
1
G( s) = , s,
, L
2
s
s
1
1
j( 90o
−
)
G( jω) =
= e
jω
ω
dB
M
= −
ω
→
−
db
20 log
20 dek
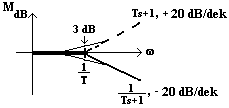




• Inercja i blok PD
1
G( s) =
,
Ts + 1
Ts + 1
1
j( arctg T
ω )
G( jω
−
) =
e
2
1 + ( T
ω )
1
ω < : M ≅ ,1
M dB = 0
T
1
1
ω > : M ≅
− jak integrator
T
T
ω
1
1
1
ω = : M =
→ 20log
≅ − d
3 B
T
2
2
o
F = − arctg 1 = 4
− 5
• Opóź nienie
s
τ
−
G( s) = e
j( ωτ )
G( jω
−
) = 1⋅ e
M dB = ,
0
F = ω
− τ [rad]
1
o
ω = :
F = 1
− rad = 5
− 7.3
τ
2
o
ω = :
F = −2 rad = 1
− 14.6
τ
Faza silnie maleje ze wzrostem częstotliwości.
• Blok II rzę du
2
ω
G( s)
n
=
- pkt. 9.1.
2
2
s + 2ξω s + ω
n
n

Skala logarytmiczna – „ręcznie”
• Oś ω
ω = 1..10 - dekada jako D jednostek (kratek, centymetrów itp.), gdzie D = 3,6,... –
wielokrotność 3. Odległość od początku dekady na osi w skali logarytmicznej wyraża wzór d = D logω.
Np. D = 3
ω
1
1.5
2
3
5
7
1
3logω
0
0,528
0.903
1.431
2.097
2.535
3
Odległość około:
0.5
1
1.5
2
2.5
Ręczne skalowanie
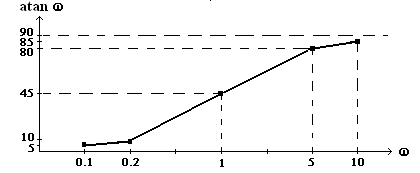
• Tangensoida
ω
0.1
0.2
1
5
10
arctgω
5.7°
11.3°
45°
78.7°
84.3°
Około
5°
10°
45°
80°
85°
Wniosek
Tangensoidę można ręcznie
wykreślać korzystając z
odcinków prostych.
Bode i Matlab
• Przykład 9.1. Transmitancja złoż ona 4 s + 2
G( s) =
0
.
0 02 s 3 + .
0 12 s 2 + s
Dobór zakresu czę stotliwoś ci następuje z zapasem nie przekraczającym dekady w prawo i w lewo od skrajnych częstotliwości granicznych (charakterystycznych). Częstotliwościami

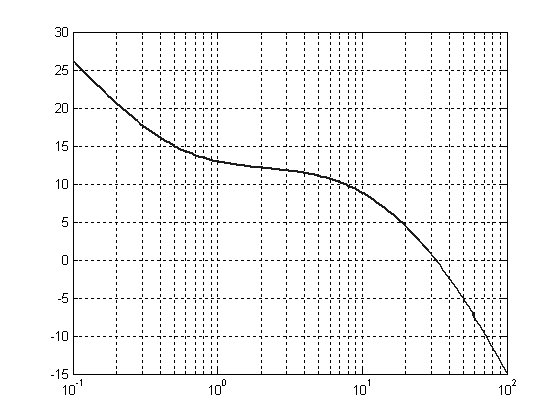
tymi są rzeczywiste pierwiastki licznika i mianownika, a w przypadku pierwiastków zespolonych częstotliwość naturalna ω n.
Mianownik:
roots( [ 0.002 0.12 1 0 ] ) →
10,
50,
0
(
4 s + .
0 )
5
(
2 2 s + )
1
G( s) =
=
0
.
0 02 s( s + 1 )
0 ( s + 5 )
0
s( .
0 1 s + )
1 ( .
0 02 s + )
1
0.5, 10, 50 - częstotliwości charakterystyczne (odwrotności stałych czasowych) Zakres 0.1...100
- 3 dekady (150 punktów)
Matlab
l = [ 4 2 ]
m = [ 0.002 0.12 1 0 ]
w = logspace(-1,2,150);
[M, F] = bode(l,m,w);
subplot(211)
semilogx(w,M), grid
subplot(212)
semilogx(w,F), grid
decybele
dB = 20*log10(M)
semilogx(w,dB),grid
• Przykład 9.2. Obiekt z opóź nieniem 5
.
0 6 −0 5
. 2 s
G( s) =
e
2 s +1
3
2
1
G (
′ s)
∠ G( jω) = ∠ G (′ jω) − .
0
ω 180
52
π
1
1
Częstotliwości charakterystyczne:
= 0 5
. ,
= 1.92 → zakres 0.1 ... 10
2
0.52
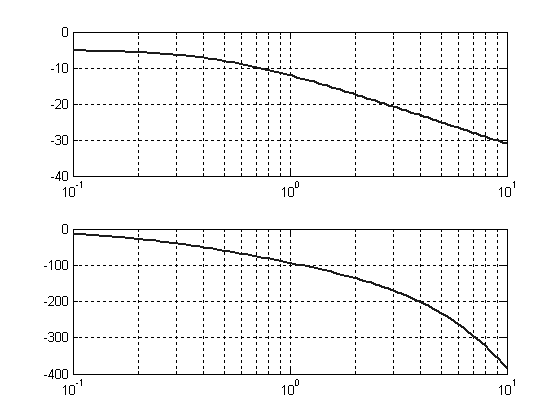
Matlab
w = logspace(-1,1,100);
[M, Fprim] = bode(0.56,[2 1],w);
F=Fprim-0.52*w’*180/pi;
subplot(211)
semilogx(w,20*log10(M)), grid
subplot(212)
semilogx(w,F), grid
Uwaga. Charakterystyka fazowa obiektu z opóźnieniem osiąga silnie ujemne wartości.
Wyszukiwarka
Podobne podstrony:
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
w9 aktywna polityka spoleczna
W9 zaocz
W9 Przetw C A
SK w9
Kopia W9 Rany krwawiące i postępowanie w krwotoku
PKM w9 osie waly III id 360040 Nieznany
EN w9 wspolpraca z siecia
inst pneumatyczna su-22 wnioski przemek, PWR [w9], W9, 5 semestr, aaaOrganizacja SEM5, Od sebka, Wyp
mościcka, W9 - mechaniczno-energetyczny
Ch w9 8.12, Studia (Geologia,GZMIW UAM), I rok, Chemia
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
metody numeryczne i w9
metody numeryczne w9
lamperski, W9 - mechaniczno-energetyczny
Wyznaczanie niepewności pomiarów, PWr W9 Energetyka stopień inż, II Semestr, Podstawy metrologii i t
matrialy, PWR [w9], W9, 5 semestr, Podstawy elektrotechniki Lab, MATERIAŁY, podst ele lab - swistak,
08 Dysze i dyfuzory, PWr W9 Energetyka stopień inż, IV Semestr, Maszyny przepływowe
GF w9 9.12, Geologia GZMiW UAM 2010-2013, I rok, Geologia fizyczna, Geologia fizyczna - wykłady, 03,
więcej podobnych podstron