Politechnika Rzeszowska
Im. Ignacego Łukasiewicza
Katedra Awioniki i Sterowania
Podstawy Elektroniki - Laboratorium
Sprawozdanie nr 2
Temat: Metody sterowania silnikami elektrycznymi.
Wykonali:
Sośnicka Monika
Syryło Mateusz
Stefański Michał
Wstęp teoretyczny:
PWM to skrót od angielskiego - Pulse Width Modulation, co oznacza modulację szerokości impulsu. Jest to najbardziej popularna metoda sterowania silnikami elektrycznymi. Polega ona na regulacji sygnału napięciowego lub prądowego poprzez zmianę szerokości impulsu o stałej amplitudzie.
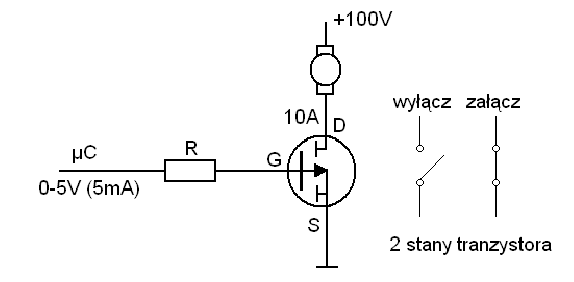
PWM jest typowym przykładem sterowania dwupołożeniowego (dwuwartościowego), gdzie obiektem steruje się za pomocą dwóch stanów logicznych (0 i 1), odpowiadających wartości napięć.
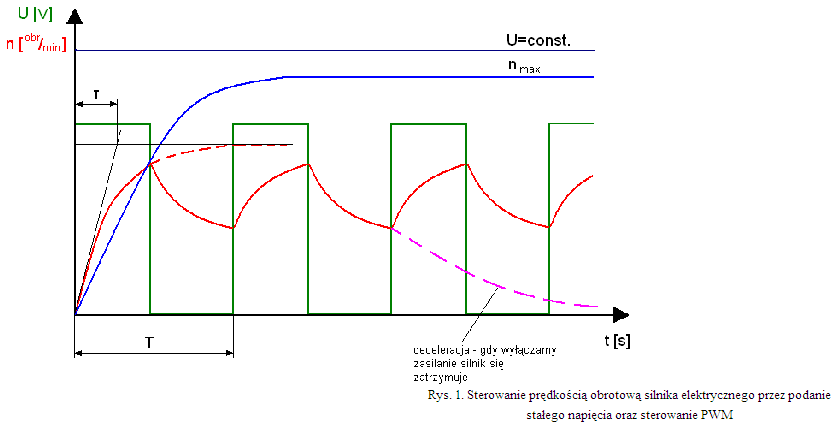
Gdy na silnik zostaje podane stałe napięcie U=const., silnik rozpocznie pracę i po pewnym czasie osiągnie prędkość obrotową nmax, maksymalną dla danego napięcia zasilającego. Przy utrzymaniu danego napięcie, silnik będzie utrzymywał stałą prędkość obrotową. Im wyższe napięcie, tym wyższa prędkość obrotowa silnika.
W przypadku sterowania PWM nie mamy do czynienia ze stałym napięciem, ponieważ podane napięcie ma charakter przebiegu prostokątnego o stałej amplitudzie.
Prędkość obrotowa silnika zależy od:
- amplitudy napięcia wejściowego,
- okresu T,
- stałej czasowej obiektu τ,
- procentu wypełnienia D.
Aby silnik pracował poprawnie, okres przebiegu prostokątnego napięcia powinien być dużo mniejszy od stałej czasowej obiektu: T<< τ.
Dla silników elektrycznych jako dobre rozwiązanie przyjmuje się:
T 1/10 τ
T 2,5ms
Wówczas częstotliwość: f=400Hz
Przy sterowaniu PWM jako dobrą częstotliwość przyjmujemy 400Hz
Wypełnienie D jest to stosunek szerokości impulsu b do okresu T. Wypełnienie podawane jest w procentach
D=![]()
100% [%]
Napięcie średnie jest innym parametrem charakteryzującym sterowanie układami PWM. Z matematycznego punktu widzenia jest ono równe:
Uśr=A![]()
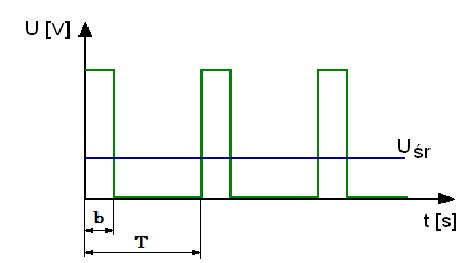
Mierzymy je z pomocą multimetru, ponieważ ma on charakter całkujący- oblicza całkę (pole powierzchni), aby następnie odnieść ją do okresu T
Cel ćwiczenia:
Pierwszy etap ćwiczenia polegał na pomiarze prądu, napięcia oraz czasu przejścia robota dla zadanego napięcia zasilania:
Nr pomiaru |
I [A] |
U[V] |
Czas [s] |
1 |
0,08 |
1,0 |
3,79 |
2 |
0,09 |
1,6 |
2,8 |
3 |
0,09 |
2,0 |
1,69 |
4 |
0,09 |
2,3 |
1,3 |
5 |
0,09 |
2,6 |
1,18 |
6 |
0,09 |
3,0 |
1,08 |
7 |
0,12 |
0,5 |
“stoi” |
8 |
0,10 |
4 |
“ślizga się” |
Drugi etap ćwiczenia był pomiarem prądu, napięcia i czasu przejścia robota dla sterowania PWM. Czynność wykonywana była dwukrotnie: raz dla napięcia 4,2[V], zaś drugi dla napięcia 5[V].
POMIARY nr 1
Sterowanie PWM przy U= 4,2 [V] f = 50 Hz
Sterowanie PWM przy U=4,2 [V] |
||||
Nr pomiaru |
Wypelnienie D [%] |
I [A] |
Uśr [V] |
czas przejścia [s] |
1 |
43 |
0,10 |
0,043 |
“stoi” |
2 |
71 |
0,09 |
0,064 |
19,1 |
3 |
77 |
0,09 |
0,07 |
11,6 |
4 |
166 |
0,09 |
0,16 |
13,0 |
5 |
200 |
0,09 |
0,19 |
9,04 |
6 |
240 |
0,09 |
0,21 |
“ślizga się” |
7 |
240 |
0,08 |
0,19 |
1,4 |
8 |
280 |
0,10 |
0,28 |
1,3 |
POMIARY nr 2
Sterowanie PWM przy U=5 [V] f = 50 Hz
Sterowanie PWM przy U=4,2 [V] |
||||
Nr pomiaru |
Wypelnienie D [%] |
I [A] |
Uśr [V] |
czas przejścia [s] |
1 |
5 |
0,07 |
0,003 |
“stoi” |
2 |
10 |
0,15 |
0,015 |
“stoi” |
3 |
22 |
0,09 |
0,019 |
1,44 |
4 |
25 |
0,08 |
0,02 |
1,35 |
5 |
31 |
0,09 |
0,03 |
1,2 |
6 |
70 |
0,1 |
0,07 |
“ślizga się” |
7 |
38 |
0,1 |
0,04 |
“ślizga się” |
8 |
55 |
0,1 |
0,055 |
“ślizga się” |
Wykresy:
Wykres zależności przejścia robota do zadanego napięcia:
Wykres zależności czasu przejścia od wypełnienia - do pomiarów nr 1.
Wykres zależności czasu przejścia od wypełnienia - do pomiarów nr 2.
Charakter przebiegów prostokątnych dla dwóch różnych procentów wypełnienia.
Wnioski:
Inne wnioski
Wraz ze wzrostem wypełnienia (przy stałym napięciu) rośnie też natężenie prądu, natomiast skróceniu ulega czas przejścia robota przez wyznaczoną trasę. Dla wypełnienia malejącego mamy do czynienia z sytuacją odwrotną.
Wypełnienie jest tym większy, im wyższe jest napięcie U. Wiąże się z tym także prędkość- tak więc nasz robot potrzebował mniej czasu na przebycie tej samej drogi.
Sprawa komplikuje się przy drugim pomiarze- ponieważ charakter przebiegu nie jest już do końca prostokątny(delikatnie faluje).
Wyszukiwarka
Podobne podstrony:
8 krokiew ugiecie mn, Budownictwo Politechnika Rzeszowska, Rok IV, Konstrukcje Drewniane, drewno mat
konsystencje, Budownictwo Politechnika Rzeszowska, Rok II, Mechanika Gruntów, Mechanika Gruntów
POLITECHNIKA RZESZOWSKA 01
Politechnika Rzeszowska Rok aka Nieznany
sciaga ekonomia i problemy, Politechnika Rzeszowska, Rok I, Semestr 1, Ekonomia
tytułowa, Budownictwo Politechnika Rzeszowska, Rok IV, Konstrukcje Metalowe, stale
harmonogram 2011 2012, Politechnika Rzeszowska Budownictwo, IBD, Materiały budowlane
19 Utwierdzenie slupa, Budownictwo Politechnika Rzeszowska, Rok IV, Konstrukcje Drewniane, drewno ma
Opis techniczny - nowy, Budownictwo Politechnika Rzeszowska, Rok IV, Konstrukcje Metalowe, Konstrukc
ARCH 2, Budownictwo Politechnika Rzeszowska, Rok IV, Urbanistyka i Architektura, Sciagi
kolokwium technol betonu, Budownictwo Politechnika Rzeszowska, Rok II, Technologia Betonu
POLITECHNIKA RZESZOWSKAv2
POLITECHNIKA RZESZOWSKA
ćw.1 spr1, Politechnika Rzeszowska, Chemia
Ćw9 sprawozdanie, Politechnika Rzeszowska, Chemia
więcej podobnych podstron