Barnik Grzegorz AiR
Paweł Majewski
Synteza regulatora od stanu dla zadanej pary ![]()
, ![]()
, ![]()
, ![]()
Ogólny zarys rozwiązania postawionego problemu.
Dany jest układ opisany modelem stanowym o poniższej postaci:
![]()
Naszym zadaniem jest przesunięcie biegunów zadanego układu przy wykorzystaniu statycznego sprzężenia od wyjścia. Aby tego dokonać musimy zacząć od wyznaczenia macierzy sprzężenia zwrotnego od stanu ![]()
i macierzy nieosobliwej ![]()
spełniających równanie:
![]()
Współczynniki ![]()
są znane.
Ponieważ zastosowanie sprzężenia zwrotnego pozwala przesunąć tylko bieguny części sterowalnej, do wyznaczenia macierzy K i G wykorzystamy twierdzenie mówiące o tym, że wspomniane macierze K i G spełniają podane wcześniej równanie wtedy i tylko wtedy gdy para (A,B) jest sterowalna.
Procedura wyznaczania macierzy K i G.
Zaczynamy od wyznaczenia macierzy nieosobliwej Q:
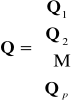
gdzie 
, ![]()
gdzie ![]()
jest ![]()
-tym wierszem macierzy odwrotnej macierzy ![]()
, która ma postać:
![]()
przy czym współczynniki ![]()
są to indeksy sterowalności pary (A,B), których suma wynosi n. Współczynniki te wyznaczamy wybierając n niezależnych wektorów z poniższego ciągu:
![]()
Ponieważ rząd macierzy B wynosi n, zaczynamy od wszystkich współczynników ![]()
. Następnie sprawdzamy niezależność liniową kolejnych wektorów z podanego wyżej ciągu ze wszystkimi poprzednimi wektorami ciągu. Jeśli dany wektor okaże się być niezależny to zwiększamy indeks d o numerze równym numerowi czynnika B badanego wektora.
Kolejnym krokiem jest wyznaczenie macierzy:
![]()
oraz ![]()
które posłużą do wyznaczenia macierzy ![]()
i ![]()
:

oraz 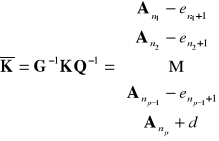
gdzie:
Bi oraz Ai to odpowiednio i-ty niezerowy wiersz macierzy ![]()
oraz ![]()
, ei jest z kolei i-tym wierszem macierzy jednostkowej stopnia n oraz ![]()
jest wektorem współczynników żądanego wielomianu.
W ten sposób możemy wyznaczyć macierz sprzężenia zwrotnego od stanu K jako:
![]()
Wyszukiwarka
Podobne podstrony:
czarodziej, Edukacja, studia, Semestr VI, Teoria Sterowania
teoria sterowania, Edukacja, studia, Semestr VI, Teoria Sterowania
zagadnienia teor urban2 2010 (1), Architektura i Urbanistyka, Studia, Semestr VI, Teoria urbanistyki
ROBOTY, Edukacja, studia, Semestr VI, Podstawy Robotyki
TS Spraw, Mechatronika WAT, Semest IV, Teoria sterowania, Laboratorium, Sprawka, Obserwator stanu
EWA5, Edukacja, studia, Semestr VI, Elementy Wykonawcze Automatyki
Laboratorium1, Edukacja, studia, Semestr VI, Elementy Wykonawcze Automatyki
Identyfikacja procesów, Edukacja, studia, Semestr VI, Identyfikacja procesów
roboty, Edukacja, studia, Semestr VI, Podstawy Robotyki, roboty
sterowanie - projekt 2 -2, Edukacja, studia, Semestr V, Sterowanie Analogowe, Laboratorium
ćwiczenie 6 - projekt, Edukacja, studia, Semestr V, Sterowanie Analogowe, Laboratorium
Projekt 3, Edukacja, studia, Semestr IV, Architektura Systemów Komputerowych, Projekt, Projekt 3
Teoria 2003, Edukacja, studia, Semestr IV, Architektura Systemów Komputerowych, Opracowania pytań
więcej podobnych podstron