BADANIA POJAZDÓW SAMOCHODOWYCH I ICH ZESPOŁÓW
NA STANOWISKACH BADAWCZYCH
1. ISTOTA I CEL BADAŃ NA STANOWISKACH BADAWCZYCH (BADAŃ STANOWISKOWYCH)
1.1. Badania w trakcji a badania stanowiskowe
Jest oczywiste, że ostateczną ocenę jakości, a niekiedy i przydatności pojazdu dla użytkownika, otrzymuje się w trakcie eksploatacji pojazdu. Tylko w warunkach rzeczywistej eksploatacji pojazdu można w pełni ocenić najszerzej rozumiane jego walory użytkowe. Producent pojazdu, zanim odda swój wyrób do eksploatacji, przeprowadza różnorakie badania eksperymentalne, na podstawie których pragnie przewidzieć zalety i wady pojazdu jakie ujawnią się w trakcie eksploatacji pojazdu u użytkownika i drogą niezbędnych ulepszeń dopracować pojazd tak, aby zalety pojazdu osiągnęły wymagany poziom. Badania eksperymentalne można podzielić na trzy zasadnicze typy:
1) badania trakcyjne, polegające na próbnej intensywnej eksploatacji pojazdu w warunkach maksymalnie zbliżonych do przewidywanych w jego eksploatacji,
2) badania poligonowe, w których warunki eksploatacji stworzone są sztucznie na wyodrębnionym terenie oraz
3) badania stanowiskowe, w których elementy pojazdu, jego zespoły, a także pojazdy kompletne badane są w warunkach mniej lub więcej odbiegających od występujących w eksploatacji, lecz realizowane są w laboratoriach; daje to lepsze możliwości badawcze, a równocześnie możliwość oceny pojazdu w stosunkowo krótkim czasie.
Każde z wymienionych badań ma określone zadanie dla ostatecznej oceny pojazdu i wzajemnie nie mogą się one wykluczać.
Badania trakcyjne prowadzone są w warunkach najbardziej zbliżonych do rzeczywistości, na ogólnie dostępnych drogach, w warunkach normalnego ruchu drogowego. Powoduje to, że są długotrwałe, wymagają dobrej organizacji, mogą być zakłócone zawsze możliwymi wypadkami drogowymi i koniecznością wymiany niektórych elementów, a nawet zespołów, sprawiają trudności pomiarowe, są badaniami niepowtarzalnymi.
Badania poligonowe prowadzone na zamkniętym terenie, na specjalnie spreparowanych drogach, wyposażonych w różne dodatkowe urządzenia (kanały wodne, tunele pyłowe itp.) umożliwiają znacznie bogatsze oprzyrządowanie pomiarowe badanego pojazdu. Badania takie charakteryzują się: dobrym odtworzeniem warunków eksploatacyjnych pojazdu, możliwością znacznie lepszego i bogatszego wyposażenia pojazdu w różnorakie urządzenia pomiarowe w tym układy do telemetrycznego przekazywania sygnałów pomiarowych, możliwością znacznego zintensyfikowania badań, a więc skrócenia czasu ich prowadzenia, znacznie łatwiejszą organizacją badań, szybszym opracowaniem ich wyników, ale jednocześnie bardzo dużym kosztem budowy i wyposażenia poligonu. Koszty poligonu są tak duże, że tylko największe koncerny samochodowe lub organizacje przemysłowe na świecie mogły pozwolić sobie na jego wybudowanie.
Znacznie ograniczone i uproszczone badania kompletnych pojazdów mogą być prowadzone na tzw. torze próbnym jazdy, na którym poszczególne odcinki mają specjalnie ukształtowane nawierzchni dla forsownej jazdy. Prowadzone są na nim głównie tzw. próby testowe (gdy pojazd z odpowiednią prędkością przejedzie tor lub jego wielokrotność bez uszkodzeń uznawany jest za dobry).
Zauważmy, że zarówno badania eksploatacyjne jak i poligonowe mają wspólną cel. Polega on na dążeniu do możliwie dobrego odtworzenia warunków występujących w eksploatacji pojazdu. Oznacza to, że dąży się do dużego podobieństwa tych warunków czyli do pewnej symulacji badań eksperymentalnych.
Na wartość wyników badań eksperymentalnych składają się trzy kwestie.
Pierwsza - to stopień adekwatności symulacji do rzeczywistych warunków eksploatacji.
Druga - to możliwość wyciągnięcia poprawnych wniosków z eksperymentu, na co wpływa stopień oprzyrządowania pomiarowego pojazdu w tym jego zespołów i elementów.
Trzecia - to koszty eksperymentu: jakie i jak przydatne wyniki otrzymuje się jakim kosztem.
Badania stanowiskowe w pełnym procesie badań pojazdów odgrywają szczególną rolę. Choć trudniej zrealizować w nich dobrą symulację warunków rzeczywistej eksploatacji pojazdu, to mają szereg innych cech stanowiących o ich przydatności. Podstawowymi walorami badań stanowiskowych są:
- w porównaniu do badań trakcyjnych i poligonowych dają większe możliwości pomiarowe (łatwiej pojazd oprzyrządować w układy pomiarowe),
- bez trudu pozwalają na wielokrotne powtarzanie tych samych eksperymentów (co w badaniach trakcyjnych jest niemożliwe, zaś w badaniach poligonowych trudne do osiągnięcia z uwagi na trudność jazdy po dokładnie tych samych torach),
- umożliwiają badania porównawcze różnych (choć podobnych) obiektów w tych samych warunkach,
- umożliwiają badania różnych wyodrębnionych zagadnień, co znacznie ułatwia ich analizę i wyciąganie stosownych wniosków,
- bardzo upraszczają organizację badań.
Cechą charakterystyczną badań stanowiskowych jest przede wszystkim to, że odtworzenie warunków eksploatacyjnych realizuje się za pomocą obciążeń i wymuszonych ruchów badanego obiektu (tj. pojazdu, jego zespołów i elementów) oraz innych oddziaływań otoczenia (np. temperatura, wilgotność itp.) stworzonych w sposób sztuczny (nie rozważamy tu badań zespołów i elementów elektrycznych i elektronicznych). Są one wytwarzane przez urządzenia, w które jest wyposażone stanowisko badawcze. Siłą rzeczy nie mogą one w dowolnie wysokim stopniu symulować warunków faktycznej eksploatacji pojazdu. Składają się na to: sposób mocowania obiektu na stanowisku (odbiegający, niejednokrotnie znacznie od warunków rzeczywistych), a także ograniczona liczba urządzeń symulujących obciążenia, ruchy i oddziaływania otoczenia.
Badania stanowiskowe narzucają więc wiele ograniczeń i nie mogą w pełni zastąpić badań poligonowych, tak jak te ostatnie nie mogą w pełni zastąpić badań trakcyjnych.
W każdych badaniach (trakcyjnych, poligonowych i stanowiskowych) wprowadzamy szereg uproszczeń. Wybór tras jazdy w badaniach trakcyjnych najczęściej wynika z badań polegających na statystycznej ocenie długości i rodzaju tras jakie pokonuje pojazd w swym „życiu”. Jednakże nie ma możliwości realizacji w badaniach wszystkich możliwych tras. Poza tym oceny statystyczne mogą być dokonywane w różny sposób. Inaczej mówiąc warunki pracy badanego obiektu są w taki czy inny sposób obierane przez badającego. Mówimy zatem, że badający formułuje model warunków pracy obiektu. Pociąga to za sobą dobór obciążeń pojazdu (nierówności nawierzchni drogi, prędkość jazdy, ciężar własny pojazdu z ładunkiem itp.). Ogólnie nazywamy je sygnałami wejściowymi ( w skrócie „we”)obiektu. Nie możemy w badaniach zastosować wszystkich możliwych sygnałów wejściowych (np. trasy jazd są obrane). W związku z tym mówimy o modelu sygnałów wejściowych. W trakcie badań nie mamy możliwości pomiarów wszystkich możliwych wielkości fizycznych występujących w pojeździe. Nazywamy je sygnałami wyjściowymi. W badaniach wybieramy niektóre z nich. Dlatego mówimy o modelu sygnałów wyjściowych (w skrócie „wy”). Sam pomiar też winien być traktowany w kategoriach modelu. Układy pomiarowe mogą być różne, działające na różnych zasadach fizycznych, przy różnych sposobach przetwarzania sygnałów (np. mechanicznych w elektryczne) i różnych błędach pomiarowych. W istocie więc stosujemy modele pomiarów. Łącznie mówimy też o modelu eksperymentu (rys). Wszystko to co mówiliśmy o modelach ma zastosowanie we wszelkich badaniach, a więc również w poligonowych i stanowiskowych, z tym że w tych ostatnich modele są na ogół formułowane przy większych uproszczeniach, szczególnie w odniesieniu do sygnałów wejściowych, a także w odniesieniu do samego obiektu (warunki jego mocowania na stanowisku).
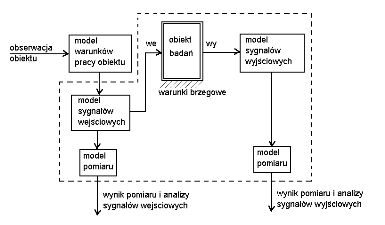
Rys.1. Model eksperymentu
W przedstawionym wyżej ujęciu badania eksperymentalne możemy scharakteryzować następująco:
- badania trakcyjne są bogate w sygnały wejściowe traktowane jako sygnały rzeczywiste, których często nie potrafimy nie tylko zmierzyć i zarejestrować, ale nawet sprecyzować co do liczby i charakteru; trudności pomiarowe sprawiają, że liczba sygnałów wyjściowych jest tu ograniczona,
- badania poligonowe są również bogate w sygnały wejściowe, choć nie w tak dużym stopniu jak w badaniach trakcyjnych; możemy natomiast uzyskać więcej sygnałów wyjściowych,
- badania stanowiskowe są na ogół ubogie w sygnały wejściowe, do tego sztucznie preparowane; stwarzają natomiast znacznie większe możliwości pomiaru sygnałów wyjściowych, zarówno co do ich liczby jak i rodzaju; ponadto mają bardzo ważną cechę: powtarzalność prób.
Każde badania eksperymentalne można uważać za pewną symulację zdarzeń rzeczywistych, różna jest jedynie jej dokładność, zakres i cel w jakim jest realizowana.
Dalej skupimy się na badaniach stanowiskowych, w których sygnały wejściowe są realizowane za pomocą wibratorów elektrohydraulicznych. Należą one do stanowisk najnowocześniejszych, umożliwiających badania symulacyjne w szerokim zakresie.
1.2. Wibratory elektrohydrauliczne
Wibratorami elektrohydraulicznymi nazywamy siłowniki hydaruliczne wyposażone w układ sterowania. Rozróżniamy wibratory liniowe, których element roboczy jakim jest tłoczysko, wykonuje ruchy posuwisto-zwrotne oraz wibratory kątowe, których element roboczy wykonuje naprzemienne ruchy obrotowe (kątowe). Rysunek wibratora liniowego i jego fotografię ze stanowiska w Przemysłowym Instytucie Motoryzacji (PIMot) pokazano na rys.2.
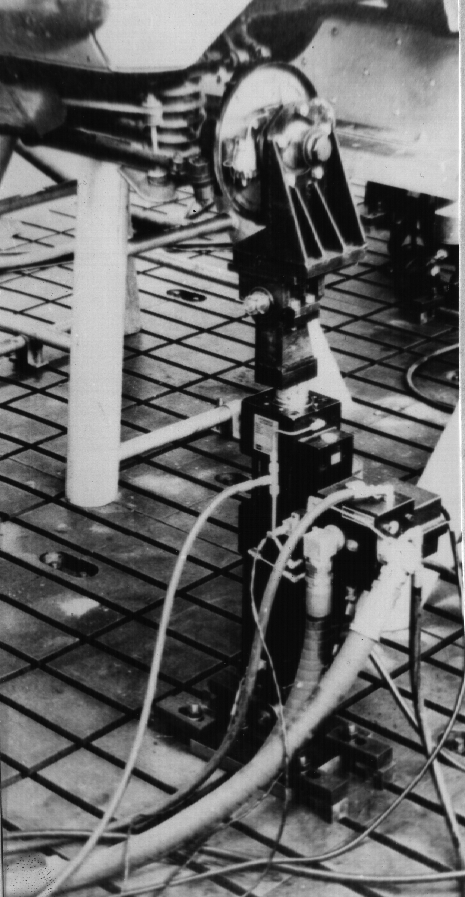
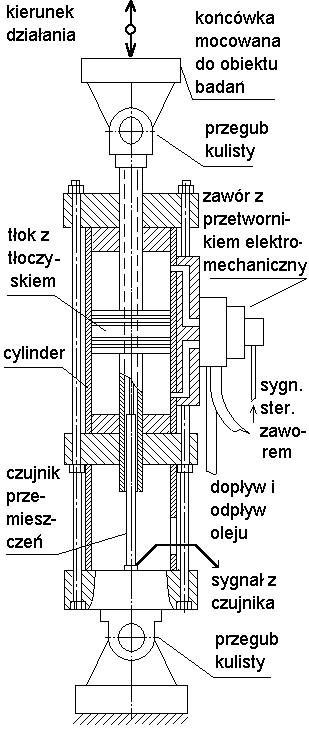
Rys.2. Elektrohydrauliczny wibrator liniowy.
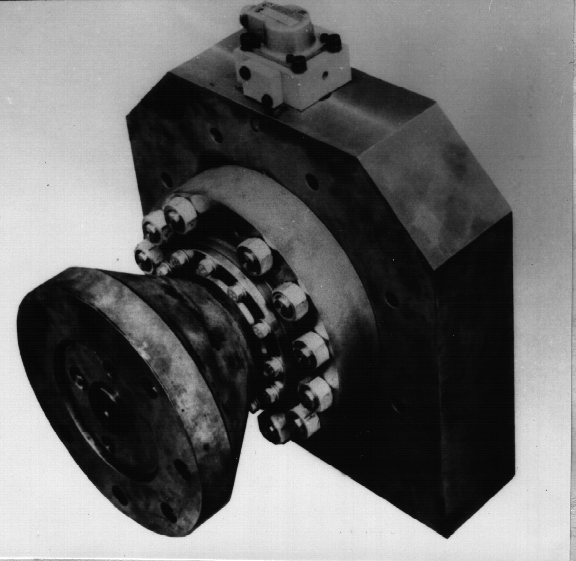
Wibrator ten może być sterowany przemieszczeniami tłoczyska, lub siłą z jaką oddziaływuje na badany obiekt. Na rys.3 pokazano rysunek i fotografię wibratora kątowego (w wersji wykonywanej w PIMot).
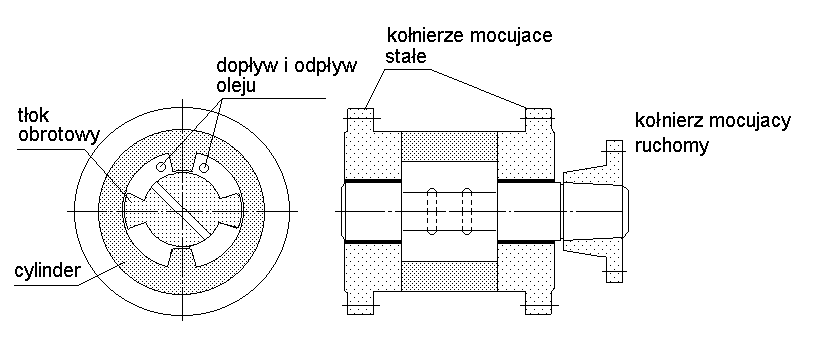
Rys.3. Elektrohydrauliczny wibrator kątowy
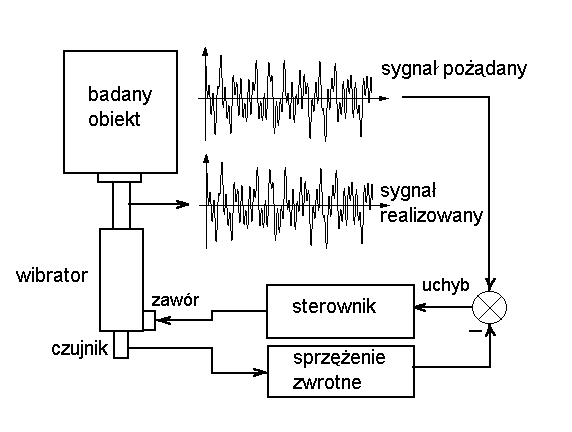
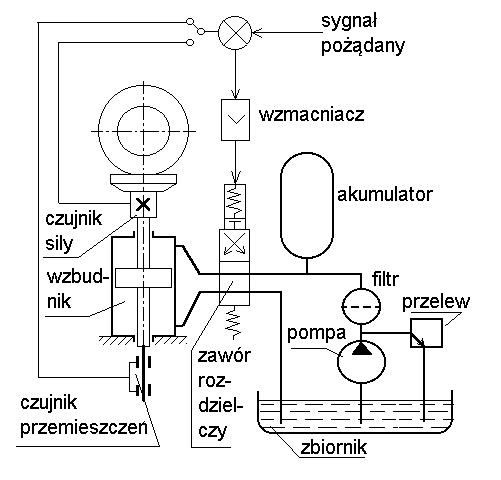
Schemat układu sterowania przemieszczeniami wibratora liniowego pokazano na rys.4. Żądany sygnał zmienny w czasie podawany jest jako analogowy (tj. ciągły) sygnał elektryczny na węzeł sumujący. Jednocześnie tłoczysko wibratora jest zaopatrzone w czujnik przemieszczeń (tłoczyska względem cylindra). Za pomocą tego czujnika mierzone jest faktyczne przemieszczenie tłoczyska. Sygnał z czujnika, jako sprzężenie zwrotne podawany jest ze znakiem ujemnym (ujemne sprzężenie zwrotne) na węzeł sumujący. Różnica sygnałów (uchyb) żądanego i mierzonego przez czujnik (mówimy, że jest to sygnał realizowany) jest podawana na regulator (sterownik), przeważnie typu PD (proporcjonalno - różniczkujący), który steruje ruchem rozdzielacza podającego olej do cylindra. Zadaniem regulatora jest doprowadzenie wartości uchybu do zera. Wówczas tłoczysko wibratora wykonuje przemieszczenia praktyczne identyczne jak dyktuje to sygnał pożądany. W zakresie mocy wibratora sygnał ten jest niezależny od reakcji z jaką obiekt oddziaływuje na tłoczysko wibratora. W przypadku sterowania siłą w miejsce czujnika przemieszczeń montowany jest szeregowo (tj. w górnej części tłoczyska) czujnik siły (najczęściej dynamometr tensometryczny). Schemat sterowania wibratorem pokazano na rys.4.
Rys.4. Schemat sterowania wibratorem
Sygnał sterujący jest podawany ze sterownika na zawór sterujący (serwozawór) rozdzielaczem. Schematy konstrukcji zaworów sterujących (firmy Moog) pokazano na rys.5. Zawory te są wykonywane w dwóch odmianach: pojedyńczy (rys.5a) i podwójny (rys.5b). Zawór pojedyńczy składa się z następujących elementów: przetwornika elektromechanicznego, stopnia sterującego i czteroczłonowego rozdzielacza. Przetwornik elektromechaniczny składa się z magnesu trwałego, cewek sterujących i przechylającej się zwory. Zwora jest umocowana w giętkiej rurce i ma ograniczone kąty obrotu (w płaszczyźnie rysunku). Rurka spełnia jednocześnie rolę przegubu zwory i uszczelnienia przetwornika elektromechanicznego od wpływu oleju. Stopień sterujący składa się z dysz i przegrody sterującej. Między końcówkami dysz i przegrodą istnieją luzy. W położeniu środkowym przegroda jednakowo przysłania obie dysze. Obrócenie zwory, wywołane przepływem prądu przez cewki sterujące, powoduje obrócenie przegrody i dysze są przesłaniane niejednakowo. Olej wpływający pod stałym ciśnieniem do zaworu (wlot oleju) wypływa przez dysze sterujące. Gdy przegroda znajduje się w położeniu środkowym w obu dyszach panuje jednakowe ciśnienie. Obrót przegrody zaburza tę symetrię. W przewodzie oleju do jednej z dysz ciśnienie wzrośnie, zaś w drugim zmaleje. Przewody te są połączone z komorami skrajnymi rozdzielacza. Powstała między nimi różnica ciśnień powoduje przesunięcie tłoczka rozdzielacza. Ruch tłoczka ograniczony jest sprężyną sprzężenia zwrotnego (giętka rurka). W ten sposób tłoczek reguluje dopływ oleju do cylindra po obu stronach tłoka wibratora, stosownie do prądu w cewkach sterujących. Budowa i parametry zaworu zapewniają proporcjonalność między sygnałem elektrycznym zasilającym cewki a ruchem tłoczka rozdzielacza. Tym samym zachodzi proporcjonalność ruchów tłoka wibratora do prądu podawanego na cewki sterujące. Zawór ma ograniczony wydatek przepływu oleju. W większych wibratorach stosuje się zawory dwustopniowe (rys.5b). Między przetwornik a główny rozdzielacz wmontowany jest rozdzielacz pośredni zwany pilotem. Przetwornik i stopień sterujący regulują ruchem tłoczka pilota, pracującego przy niskim ciśnieniu. Z kolei pilot steruje głównym rozdzielaczem. Główny rozdzielacz zaopatrzony jest w czujnik przemieszczeń, podający sygnał na dodatkowe sprzężenie zwrotne. Podwójny układ 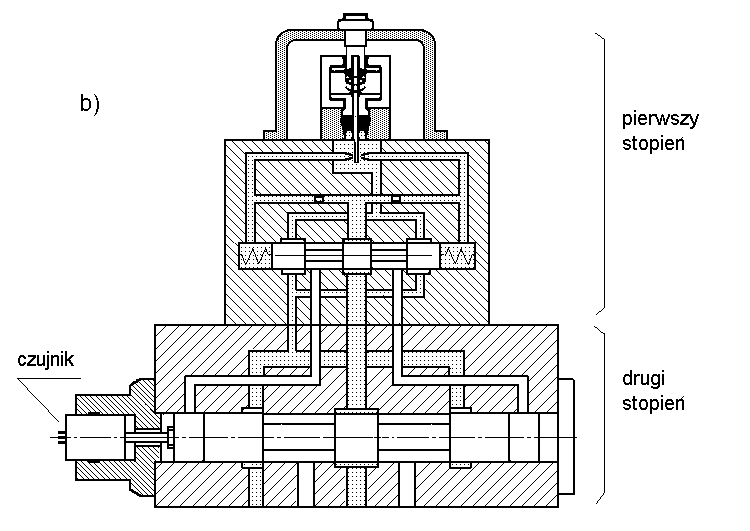
regulacji 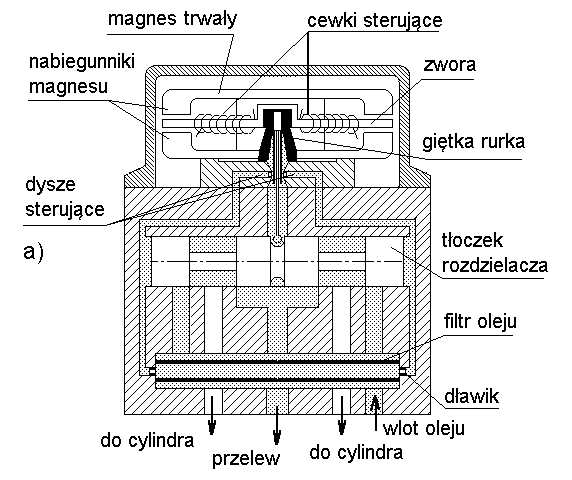
zapewnia poprawną pracę głównego rozdzielacza.
Rys.5. Zawory sterujące wibratorami
Schemat zasilania wibratora pokazano na rys.6.
Rys.6. Schemat zasilania wibratora.
Wibratory elektromechaniczne mogą generować sygnały złożone (nie tylko harmoniczne) dzięki zastosowaniu pętli sterowania (nadążnego). Ograniczenia jakie są nakładane na wibrator wynikają z mocy wibratora oraz wydatku oleju przechodzącego przez serwozawór. Firmy produkujące wibratory podają charakterystyki częstotliwościowe wibratora. Przykład takiej charakterystyki pokazano na rys.7. Krzywa ograniczająca wartości amplitud odpowiadające wartościom częstotliwości przemieszczeń tłoczyska określa możliwości pracy wibratora. Ciśnienie oleju zasilającego takie wibratory jest wysokie. Stosuje się p=160÷220 at.
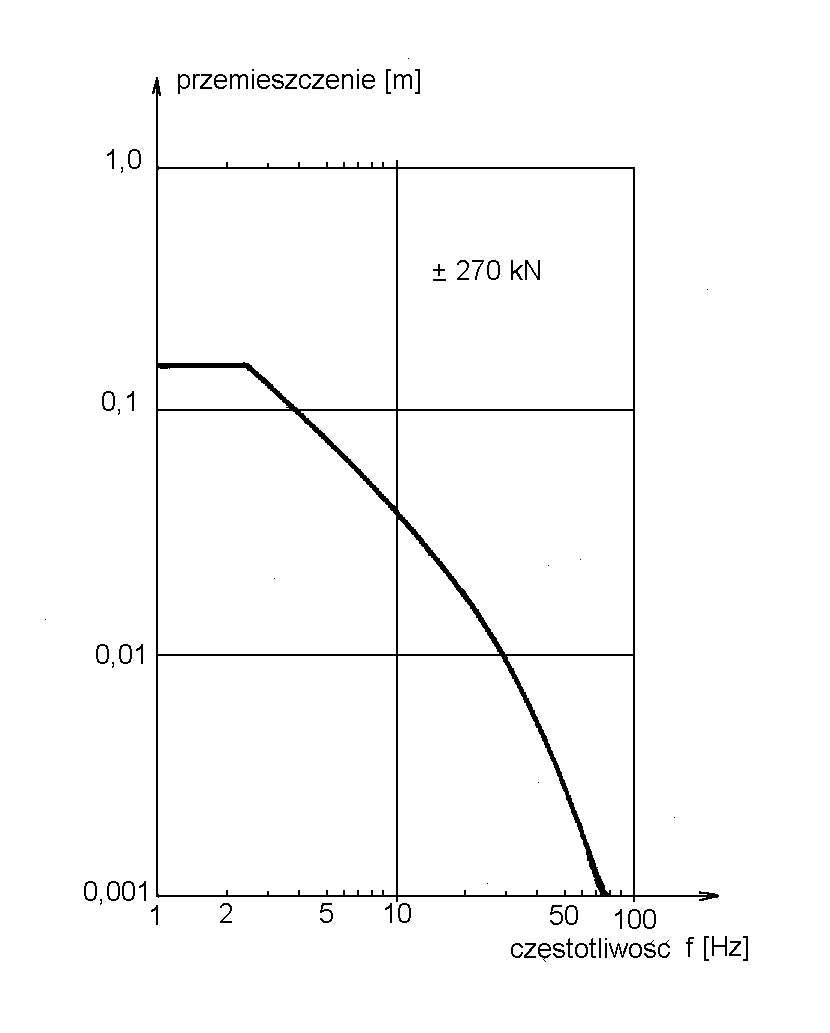
Rys.7. Charakterystyka wibratora (przykład)
Wibratory elektromechaniczne są zazwyczaj urządzeniami precyzyjnymi i kosztownymi. Aktualne technologie zapewniają wysoką ich trwałość i niezawodność. Są one stosowane z tzw. symulacyjnymi badaniami obiektów. Możliwość generowania sygnałów o złożonych przebiegach w czasie pozwala na duże zbliżenie tych sygnałów do takich samych sygnałów mierzonych i rejestrowanych na danym obiekcie w warunkach jego rzeczywistej pracy. Przy zastosowaniu wibratorów elektromechanicznych można więc w laboratorium symulować obciążenia i drgania obiektu bardzo bliskie tym, jakie napotyka on w rzeczywistości. Takie badania nazywamy symulacją eksperymentalną, a stanowiska badawcze realizujące symulację eksperymentalną nazywamy stanowiskami symulacyjnymi.
2. Stanowiska symulacyjne
Stanowiska symulacyjne są budowane dla różnych badań tak pod względem ich celu jak i kompletności pojazdu. Są one kompletowane dla badań trwałości zmęczeniowej elementów pojazdu oraz dla wyznaczania charakterystyk dynamicznych. Kompletowane są stanowiska dla samochodów kompletnych, częściowo kompletnych, poszczególnych zespołów, jak również niektórych elementów pojazdu.
2.1. Stanowiska symulacyjne dla kompletnych pojazdów
Stanowiska takie są stawiane na specjalnie zbudowanych fundamentach. Fundamenty te zazwyczaj spoczywają na większej liczbie poduszek pneumatycznych leżących na grubych płytach wkopanych w ziemię. Technologia fundamentowania wymaga tężenia betonu w
5
1
J. W. Osiecki: Badania pojazdów samochodowych.
Wyszukiwarka
Podobne podstrony:
3B-Badanie uk, przydatne, PSK, bezpieczenstwo transportu samochodowego
Bezpieczeństwo transportu samochodowego wykład
Bezpieczeństwo w transporcie samochodowym Wybrane problemy
Bezpieczeństwo w transporcie samochodowym Wybrane problemy
Układy Bezpieczeństwa Biernego W Samochodach Osobowych, STUDIA - Kierunek Transport, STOPIEŃ I, MATE
Zdrowe i przyjazne miejsce pracy, BHP, Transport samochodowy BHP
Bezpieczna podróż samochodem
Ćw nr 1(1), przydatne, PSK, automatyka
transport i spedycja dokumentacja w transporcie samochodowym
Opis zawodu Dyspozytor transportu samoch, Opis-stanowiska-pracy-DOC
Transport samochodowy
Transport samochodowy, szkoła
Bezpieczny transport i skladowanie
Problematyka transportu samochodowego
137 432302 dyspozytor transportu samochodowego
Problematyka transportu samochodowego
więcej podobnych podstron