Akademia Górniczo-Hutnicza
Im. Stanisława Staszica w Krakowie
Teoria Maszyn i Mechanizmów
Temat: Analiza kinematyczna i kinetostatyczna mechanizmu
Nr projektu 5B
Bębenek Dawid
Rok II „D” Grupa 29
Rok akademicki 2009/2010
Prowadzący: dr inż. Józef Felis
Analiza mechanizmu dźwigniowego
Synteza strukturalna i geometryczna mechanizmu
1.1 ZDEFINIOWANIE WYMIARÓW MECHANIZMU, PARAMETRÓW POŁOŻENIA, OGRANICZENIA GEOMETRYCZNE.
Symboliczny zapis struktury i parametrów projektowanego mechanizmu:
Zakres danych |
Parametry mechanizmu |
1. Struktura mechanizmu. |
|
2. Parametry kinematyczne członu napędzającego. |
(s1,v1,0) |
3. Masy i parametry bezwładności członów (mi, JSi). |
(0,0) ; (0,0) ; (m3JS3) |
4. Obciążenie uogólnionymi siłami zewnętrznymi (Pi, Mi). |
(0,0) ; (0,0) ; (P3,M3) |
5. Uogólniona siła równoważąca do wyznaczenia (PR1 lub MR1). |
PR1 |
Schemat ideowy mechanizmu ma postać:
Przyjęte wymiary dla mechanizmu:
|AB| = 40cm (0,4m)
|BC| = 100cm (1m)
|CD| = 40cm (0,4m)
α=300
Przyjęte parametry:
Prędkość członu napędowego:
v=2![]()
Przemieszczenie członu napędowego:
S1 = 20cm (0,2m)
Sc = 40cm (0,4m)
t = 0
Ograniczenia geometryczne:
Działanie mechanizmu jak i wszystkie parametry takie jak prędkość czy przyśpieszenie poszczególnych elementów uzależnione są od zadanych przez nas długości wszystkich członów mechanicznych jak i zakresu w jakim pracują poszczególne pary kinematyczne.
Przy moich założonych parametrach długości mechanizm może pracować w takim zakresie:
Suwak z nr 3 może przesuwać się po prowadnicy w prawo na odległość 0.2 m.
Nazwa strukturalna mechanizmu: mechanizm suwakowo - jarzmowy.
1.2 RUCHLIWOŚĆ ORAZ KLASA MECHANIZMU
Ruchliwość teoretyczna:
w = 3n - 2p5 - p4
p5 -Liczba par kinematycznych klasy V- (0,1), (1,2), (2,3), (3,0)
p4 -Liczba par kinematycznych klasy IV- Brak par kinematycznych klasy IV
n- liczba członów- 3
w = 3*3 - 2*4
w = 1
Oznacza to, że liczba więzów jaką trzeba narzucić na człony aby łańcuch kinematyczny był nieruchomy względem podstawy wynosi 1 oraz oznacza to także, że jeden z jego członów poruszających się względem podstawy jest członem napędowym.
Podział mechanizmu na grupy strukturalne:
Analizowany mechanizm składa się z członu napędzającego 1 oraz grupy strukturalnej klasy 2
Ruchliwość grupy strukturalnej:
Ilość członów n = 2,
Ilość par kinematycznych klasy V p5 = 3; (0,2), (2,3), (3,0).
w = 3n - 2p5 =
w = 3*2 - 2*3
w = 0
Analiza kinematyczna mechanizmu
2.1 Model mechaniczny zbudowany w programie SAM42.
2.2 Charakterystyki przemieszczeń, prędkości, przyspieszeń liniowych charakterystycznych punktów w programie SAM42.
Analiza kinematyczna metodą grafoanalityczną
|AB|=40cm (0,4m)
|BC|=100cm (1m)
|CD|=40cm (0,4m)
α=300
Zadanie będziemy rozwiązywać wykreślnie korzystając z programu AutoCAD.
(Dwukrotne podkreślenie oznacza że znamy kierunek i wartość działającej siły, jednokrotne podkreślenie oznacza że znamy tylko kierunek działającej siły)
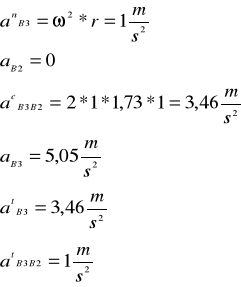
ANALIZA PRĘDKOŚCI.
![]()
=2 ![]()
![]()
![]()
=1,73 ![]()
![]()
=1 ![]()
ANALIZA PRZYŚPIESZEŃ
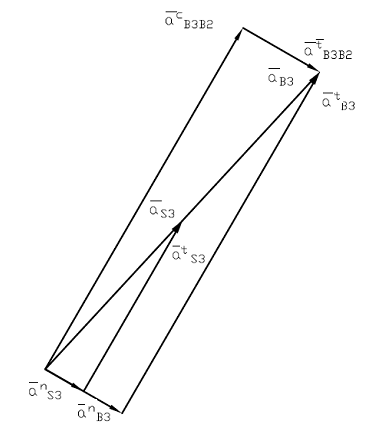
![]()

=
![]()

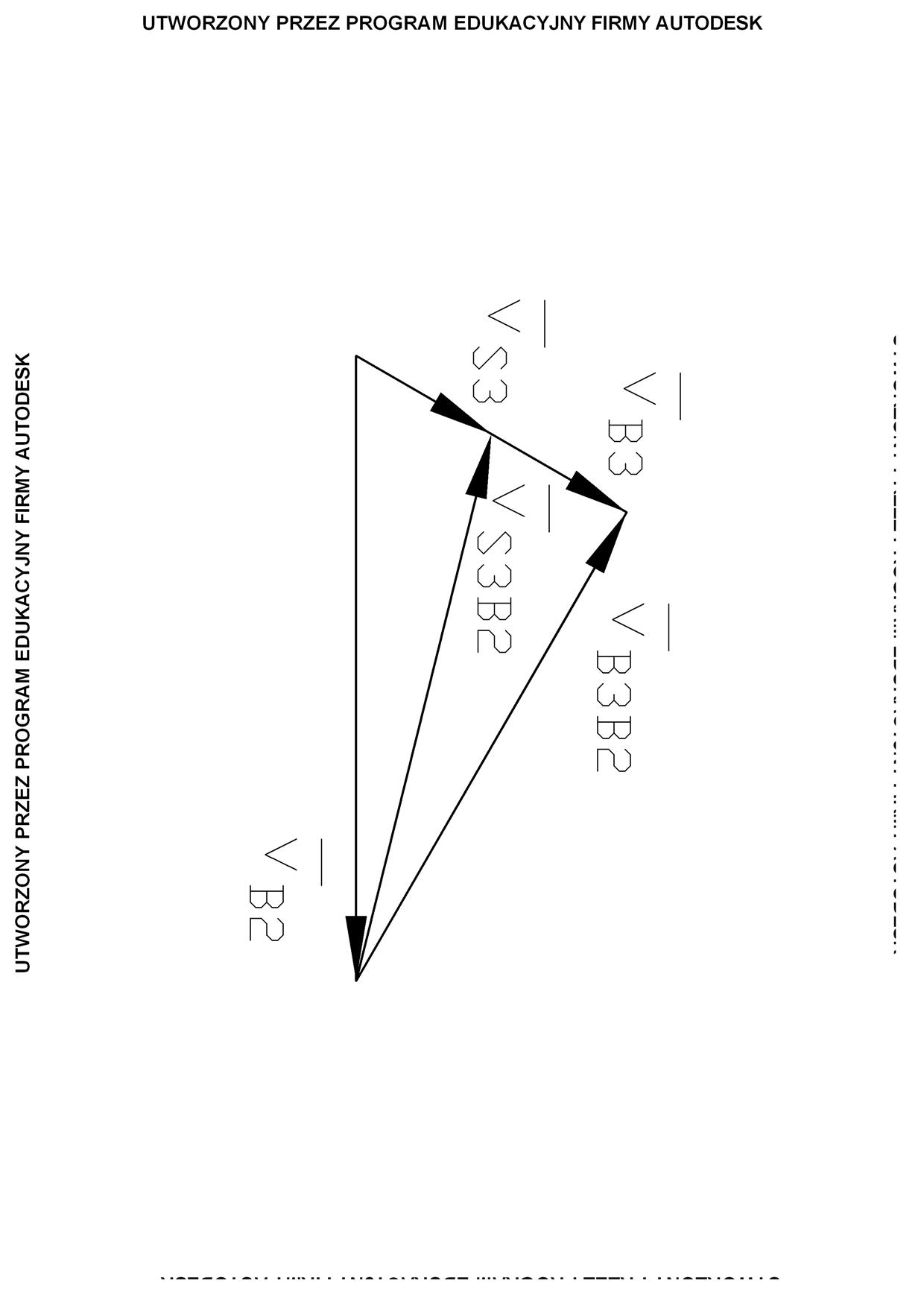
Analiza kinematyczna metodą analityczną
Zamknięty wielobok wektorowy mechanizmu:
Mechanizm opisany został prze 5 wektorów . Należy zatem przyjąć do obliczeń:
2 n -2 = 8 parametrów. (n-liczba wektorów)
Długości poszczególnych wektorów:
s1 = s0 + vA*t = (0,2 + vA * t)
l1=0,4 [m]
l4=1,066 [m]
l5= 0,1 [m]
l6=0,4[m]
Przyjęty czas: t=0 (s=0,2 m)
Dane kąty: ![]()
![]()
![]()
Parametry do obliczenia:
l3= l3 (t) , ![]()
= ![]()
(t), ![]()
, ![]()
Dla zamkniętego wieloboku wektorowego można zapisać następujące równanie wektorowe:
![]()
Wszystkie wektory oprócz ![]()
i ![]()
mają stałą długość natomiast podane wektory zmienia swoją długość podczas ruchu mechanizmu.
Rzutując wektory na osie układu współrzędnych OX i OY mamy:
Podnosząc do kwadratu oba równania otrzymujemy :
Dodając stronami oraz wyciągając czynnik ![]()
przed nawias z lewej strony otrzymamy ![]()
oraz jedynkę trygonometryczną, pierwiastkując obustronnie otrzymamy równanie:
![]()
= 0,9999 [m]
Dzieląc równania (**) stronami otrzymamy:

![]()
= -300
Prędkości jarzma 3.
W celu wyznaczenia prędkości kątowych i liniowych jarzma różniczkujemy pierwsze równanie z układu (*), podstawiając ![]()
Obracając układ współrzędnych OXY o kąt ![]()
otrzymujemy na podstawie ostatniego równania prędkość względną punktu na jarzmie 3 poruszającego się względem suwaka 2.

![]()
![]()
= -1,73 [![]()
]
Prędkość kątową jarzma ![]()
znajdziemy, obracając układ współrzędnych o kąt: ![]()

![]()
Oraz:
![]()
![]()
=1![]()
W celu wyznaczenia przyśpieszeń kątowych i liniowych różniczkujemy równanie:
Podstawiając ![]()
.

W celu wyznaczenia przyspieszenia względnego 
obracamy układ współrzędnych o kąt ![]()
. Otrzymujemy:
![]()
![]()
![]()
=1![]()
Obracając układ współrzędnych o kąt![]()
otrzymamy przyspieszenie kątowe jarzma ![]()

![]()
=3,46 ![]()
Prędkość punktu D:
Na podstawie rysunku wieloboku wektorowego widzimy, iż:
![]()
Rzutując na osie współrzędnych układu OXY otrzymamy:
Różniczkując równania otrzymujemy:
![]()
sin(![]()
) = cos(![]()
)
cos(![]()
) = - sin(![]()
)
![]()
= - 0,34[m/s]
![]()
=0,2
Korzystając z tw. Pitagorasa:
![]()
=0,4 [m/s]
Przyśpieszenie obliczamy różniczkując ostatni układ równań:
Analogicznie: aDX=-0.69 ![]()
aDY=-1,2 ![]()
a=1,4![]()
2.5. Podsumowanie analizy kinematycznej mechanizmu oraz zestawienie wyników.
Parametr [jednostka] |
Metoda Grafoanalityczna
|
Metoda Analityczna |
φ3 |
330
|
330
|
VB3B2 |
1,73 |
-1,73 |
VB3 |
1 |
1 |
VD |
0,4 |
0,4 |
ω3 |
1 |
1 |
aB2 |
0 |
0 |
aB3 |
1 |
1 |
aD |
1,42 |
1,4 |
atB3B2 |
1 |
1 |
ε3 |
3,46 |
3,46 |
Zgodność parametrów przedstawionych w tabeli oznacza, że nie został popełniony błąd.
Dodatkowo parę poszczególnych parametrów zostało sprawdzonych w programie SAM42, wyniki były w przybliżeniu takie same. (program SAM42 podawał nam dokładniejsze parametry).
3. Analiza kinetostatyczna
3.1 Założenia analizy.
Dla mechanizmu przyjmujemy:
Masa członu nr 3 10 kg (tylko ten człon musi mieć zadaną masę-warunki zadania).
Moment bezwładności członu nr 3 względem środka masy liczony w połowie długości elementu nr 3: 
(Stosujemy wzór uproszczony)
Mechanizm znajduję się w polu grawitacyjnym ![]()
Wartości sił obciążających mechanizm:
M3=10Nm
P3=10N
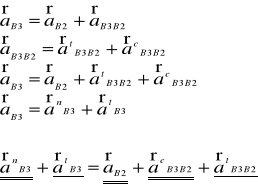
3.1.1 Wyznaczenie sił oraz momenty bezwładności działających na mechanizm:
Wyznaczenie reakcji w parach kinematycznych oraz siły równoważącej metodą grafoanalityczną
Rozważany przeze mnie mechanizm składa się z członu napędzającego 1 oraz jednej grupy strukturalnej klasy 2. Ruchliwość mechanizmu w=1. Analizę można podzielić na dwa etapy :
W etapie pierwszym przeprowadzimy analizę grupy strukturalnej a w etapie drugim analizę członu napędzającego 1.
Analiza sił działających na grupę strukturalną:
Działające siły:
siła ciężkości przyłożona do środka ciężkości członu nr 3.
siła bezwładności (siła d'Alamberta) przyłożona do środka ciężkości członu nr 3 skierowana przeciwnie do przyśpieszenia członu nr 3.
siły reakcji w przegubach (reakcję w punkcie C przedstawiamy w postaci 2 składowych styczną i normalną. Reakcja R12 ma kierunek prostopadły do członu nr 3 co wykażemy w dalszej analizie).
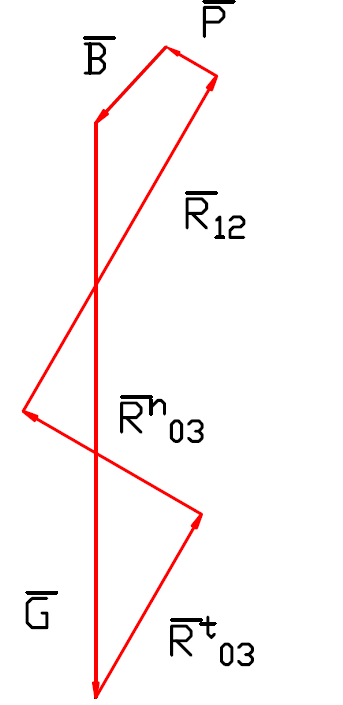
Warunek równowagi sił przyłożonych do grupy strukturalnej, możemy zapisać:
![]()
(Dwukrotne podkreślenie oznacza że znamy kierunek i wartość działającej siły, jednokrotne podkreślenie oznacza że znamy tylko kierunek działającej siły)
Kierunki sił reakcji: kierunek siły R12 jest prostopadły do członu 3 (ponieważ pomijamy tarcie w danej parze). Analogicznie mamy reakcje R03.
Do wyznaczenia mamy trzy niewiadome w celu graficznego rozwiązania równania (*) musimy uprzednio wyznaczyć jedną z nich.
Wyznaczmy zatem reakcję ![]()
na podstawie algebraicznego warunku równowagi momentów wszystkich sił przyłożonych do grupy strukturalnej względem punktu B.
![]()
![]()
![]()
36,123
Obliczając analitycznie niewiadomą ![]()
do obliczenia pozostały nam tylko dwie niewiadome, które to obliczymy graficznie.
![]()
Rozwiązujemy graficznie powyższe równanie rysując zamknięty wielobok sił i wyznaczamy wartości sił.
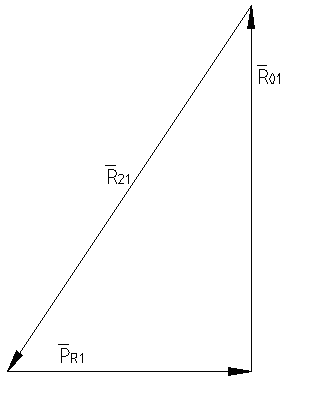
Analiza sił działających na człon napędzający:
Działające siły:
Siła reakcji R21 skierowana prostopadle do członu nr 3 oraz siła reakcji R01 skierowana prostopadle do prowadnicy 1.
Siła równoważącą PR1 oraz moment równoważący M01
Obliczenie siły równoważącej metodą mocy chwilowej.
W celu uniknięcia błędu w analizie kinetostatycznej, wskazane jest sprawdzenie obliczonych wyników inną metodą. Dobrą metodą sprawdzającą jest metoda mocy chwilowej, która pozwala na szybkie wyliczenie momentu równoważącego przyłożonego do członu napędzającego.
Ze względu na fakt, iż metoda opiera się na sumowaniu mocy wszystkich uogólnionych sił zewnętrznych przyłożonych do członów mechanicznych konieczna jest znajomość prędkości punktów przyłożenia sił odpowiednich prędkości kątowych członów obciążonych momentami sił oraz kątów pomiędzy wektorami sił uogólnionych i prędkości uogólnionych.
Równanie mocy chwilowych dla zadanego mechanizmu ma postać:
![]()
Wyznaczając z równania siłę równoważącą:

cosα1=1670
cosα2=1500
![]()
=
Wyznaczenie siły równoważącej w programie SAM (wykres sił). Wartość wyznaczona 32,2N
8
Wyszukiwarka
Podobne podstrony:
najlepsz wersja chyba, Studia Mechatronika, Semestr 4, TMM, Projekty
2B-I, Studia Mechatronika, Semestr 4, TMM, Projekty
tmm3a odz, Studia Mechatronika, Semestr 4, TMM, Projekty
TMM+3b - zmieniony, Studia Mechatronika, Semestr 4, TMM, Projekty
TMM+3b, Studia Mechatronika, Semestr 4, TMM, Projekty
5Bmoje, Studia Mechatronika, Semestr 4, TMM
TMM sprawko 1, Studia Mechatronika, Semestr 4, TMM
TI -wyklad 2, Studia - Mechatronika, I semestr, Technologia Informacyjna
Elektronika 6, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 6
Sprawko nasze, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 5
sprawko metro, Studia Mechatronika, Semestr 4, Metrologia
Elektronika 5 protokół stary, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 5
Pytania na kolosa, Studia, Mechatronika, Semestr III, Techniki wytwarzania i systemy montażu, Wykład
Elektronika 6 protokół nowy, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw. 6
Sprawko stabilizacja napięcia, Studia, Mechatronika, Semestr IV, Podstawy elektroniki, Laborki, ćw.
Biznes plan - praca zaliczeniowa, Studia - materiały, semestr 7, Zarządzanie, Marketing, Ekonomia, F
więcej podobnych podstron