JAKA JEST RÓŻNICA POMIĘDZY UKŁADEM ODNIESIENIA INERCJALNYM I NIEINERCJALNYM
Pierwsze prawo Newtona formułuje się następująco: każde ciało znajduje się w stanie spoczynku lub mchu jednostajnego prostoliniowego, dopóki działanie ze strony innych ciał nie zmieni tego stanu. Dwa wymienione stany mają wspólną cechę: przyspieszenie ciała jest równe zeru. Pozwala to inaczej sformułować pierwsze prawo dynamiki: prędkość dowolnego ciała pozostaje stała (w szczególności równa zeru), dopóki oddziaływanie ze strony innych ciał jej nie zmieni.
Pierwsze prawo Newtona nie jest spełnione we wszystkich układach odniesienia. Wiemy, że charakter ruchu zależy od układu odniesienia. Rozważmy dwa układy odniesienia, poruszające się względem siebie z pewnym przyspieszeniem. Jeżeli względem jednego z tych układów ciało spoczywa, to względem drugiego, oczywiście, ciało to porusza się z przyspieszeniem. Widzimy, że pierwsze prawo dynamiki nie może być spełnione we wszystkich układach.
Układ odniesienia, w którym jest słuszne pierwsze prawo Newtona, nazywamy inercjalnym. Samo prawo nazywa się niekiedy prawem bezwładności (inercji). Układ odniesienia, w którym pierwsze prawo Newtona nie jest spełnione, nazywamy nieinercjalnym. Istnieje nieskończenie wiele układów inercjalnych. Każdy układ odniesienia, który porusza się względem danego układu inercjalnego ruchem jednostajnym po linii prostej, jest także układem inercjalnym.
POLE POTENCJALNE SIŁ. ENERGIA W POLU POTENCJALNYM. PRACA SIŁ POTENCJALNYCH.
Pole nazywamy potencjalnym, jeżeli można je opisać za pomocą funkcji Π (x, y, z, t), której gradient] określa silę w każdym punkcie pola: F = VΠ. Funkcję H nazywamy potencjałem. Jeżeli potencjał nie zależy jawnie od czasu, tzn. Π = Π (x, y, z), to pole potencjalne jest stacjonarne, a jego siły są siłami zachowawczymi. Jeżeli pole jest niestacjonarne, to nie można utożsamiać sił potencjalnych i zachowawczych, chociaż pole ma potencjał Π (x, y, z). Pole sił zachowawczych jest szczególnym przypadkiem potencjalnego pola sił.
Gdy praca sił pola nie zależy od drogi, lecz tylko od położeń początkowego i końcowego, wtedy każdemu punktowi pola można przypisać wartość pewnej funkcji Π(x, y, z), taką że różnica wartości tej funkcji w punktach l i 2 jest równa pracy sił pola: A12=U1-U2
Można postąpić w następujący sposób. Pewnemu punktowi O przypisujemy dowolną wartość U0 tej funkcji. Każdemu innemu punktowi P przypisujemy wartość określoną wzorem U (P) = U0+AP0, gdzie AP0 jest pracą wykonaną przez pole zachowawcze przy przemieszczaniu cząstki z punktu P do punktu 0. Ponieważ praca nie zależy od drogi, więc określona w ten sposób wartość U (P) jest wybrana jednoznacznie. Zauważmy, że funkcja U (P) ma wymiar pracy. Zgodnie z wartości funkcji w punktach 1 i 2 wynoszą U1 = U0+A10; U2 = U0+A20. Obliczamy różnicę tych wartości, wiedząąc, że A20 = —A02. W wyniku tego otrzymujemy U1-U2=A10-A20=A10+A02. Suma A10+A02 jest pracą wykonaną przez pole przy przesuwaniu cząstki z punktu l do punktu 2 po torze przechodzącym przez 0. Jednak praca wykonana nad cząstką na drodze z punktu l do punktu 2 po dowolnym torze (niekoniecznie przechodzącym przez 0) jest jednakowa. Dlatego sumę A10+A02 można oznaczyć jednym symbolem An. Widzimy, że za pomocą funkcji U można obliczać pracę wykonaną przez siły zachowawcze na dowolnej drodze, łączącej punkty l i 2. Załóżmy, że na cząstkę działają tylko siły zachowawcze. Praca wykonana nad cząstką na drodze 1-2 może być przedstawiona wzorem A12=U1-U2. Zgodnie z A12=T2-T1, praca ta jest zużywana na wzrost energii kinetycznej cząstki. Mamy zatem wzór T2-T1=U1-U2 z którego wynika, że T2+U2=T1+U1. Otrzymany wynik oznacza, że wielkość E=T+U, obliczona dla cząstki w polu sił zachowawczych, jest stała, czyli jest całką ruchu.
Z tego wynika, że U jest składnikiem całki ruchu o wymiarze energii. W związku z tym U (x, y, z) nazywamy energią potencjalną cząstki w zewnętrznym polu sił. Wielkość E, równą sumie energii kinetycznej i energii potencjalnej, nazywamy całkowitą energią mechaniczną cząstki.
. SIŁY DZIAŁAJĄCE W NIEINERCJALNYM UKŁADZIE ODNIESIENIA
Siła bezwładności
Prawa Newtona są spełnione tylko w inercjalnych układach odniesienia. Przyspieszenie ciała w jest takie samo we wszystkich inercjalnych układach odniesienia. Każdy układ nieinercjalny porusza się względem układów inercjalnych z pewnym przyspieszeniem, dlatego przyspieszenie w' w nieinercjalnym układzie odniesienia różni się od przyspieszenia w w układzie inercjalnym. Różnicę przyspieszeń ciała w układach inercjalnym i nieinercjalnym oznaczmy symbolem a: w-w' = a.
Jeżeli ruch układu nieinercjalnego względem inercjalnego jest ruchem postępowym, to wektor a jest taki sam dla wszystkich punktów przestrzeni — jest to po prostu wektor przyspieszenia nieinercjalnego układu odniesienia. Jeżeli układ nieinercjalny wiruje, to wektor a jest różny w różnych punktach przestrzeni (a = a (r'), gdzie r' jest wektorem położenia punktu względem nieinercjalnego układu odniesienia).
Załóżmy, że wypadkowa wszystkich sił, których źródłem są inne ciała, wynosi F. Zgodnie z drugim prawem dynamiki, przyspieszenie ciała względem dowolnego układu inercjalnego jest równe ![]()
Natomiast przyspieszenie ciała względem pewnego układu nieinercjalnego, można przedstawić w postaci ![]()
Stąd wynika, że nawet przy F = O ciało porusza się względem układu nieinercjalnego z przyspieszeniem -a, czyli tak, jakby na niego działała siła — m a. Z powyższego wynika, że do opisu ruchu w nieinercjalnych układach odniesienia można posługiwać się równaniami Newtona, o ile — niezależnie od sił, których źródłami są inne ciała — wprowadzi się tzw. silę bezwładności Fb, równą iloczynowi masy ciała przez różnicę przyspieszeń a, wziętą ze znakiem minus: Fb = -m(w-w') = -ma
Zapis drugiego prawa Newtona w nieinercjalnym układzie odniesienia ma następującą postać: mw'=F.+Fb.
Odśrodkowa siła bezwładności
Siły bezwładności Fbo=mω2R, które pojawiają się w wirujących (względem układów inercjalnych) układach odniesienia, nazywamy odśrodkowymi siłami bezwładności. Taka siła „działa" na ciało w wirującym układzie odniesienia, niezależnie od tego, czy ciało to spoczywa w tym układzie, czy porusza sig względem tego układu z prędkością v'.
Jeżeli położenie ciała w obracającym się układzie odniesienia jest scharakteryzowane wektorem położenia r', to odśrodkową siłę bezwładności można przedstawić w postaci podwójnego iloczynu wektorowego: Fbo=m.[ω,[r',ω]]
Siła Coriolisa
Jeżeli ciało porusza się względem wirującego układu odniesienia(rys a), to — oprócz odśrodkowej siły bezwładności — pojawia się jeszcze jedna siła, zwana silą Coriolisa lub silą bezwładności Coriolisa. W wirującym układzie odniesienia cząstka zachowuje się tak, jakby — oprócz skierowanej do środka okręgu siły F — działały na nią jeszcze dwie siły: Fbo = mω2 R i Fc, której wartość wynosi 2mv'ω. Łatwo jest przekonać się, że siłę Fc można przedstawić w postaci Fc = 2m [v'<a].
Siła ta jest właśnie siłą bezwładności Coriolisa. Jeżeli v' = O, to siła Coriolisa jest równa zeru. Natomiast siła f|», nie zależy od v' — działa ona zarówno na spoczywające, jak i poruszające się cząstki. Dla przypadku przedstawionego na rysunku b mamy ![]()
A następnie ![]()
JAKIE DODATKOWE SIŁY NALEŻY UWZGLĘDNIĆ W OBRACAJĄCYM SIĘ UKŁADZIE.
Aby stosować mechanikę klasyczną do nieinercjalnych układów odniesienia należy wprowadzić siły nienewtonowskie (pozorne), nazywane siłami bezwładności. Siły te w przeciwieństwie do sił opisanych wcześniej nie są wywierane na ciało przez żadne z ciał znajdujących się w jego otoczeniu. Do sił pozornych zaliczamy siłę Coriolisa i odśrodkową. Kinetyczno - geometryczna zależność:
Przyjmujemy, że mamy dowolne ![]()
, które dla układu inercjalnego ma wartość ![]()
, a dla nieinercjalnego ![]()
![]()
=![]()
=![]()
Szybkość zmian wektora A ratującego wraz z układem obracającym się określa zależność:
Skoro A może być dowolne więc może być równe r :
Siła odśrodkowa jest równa, co do wartości sile dośrodkowej, lecz działa na zewnątrz; kierunek zgody z promieniem toru poruszającego się ciała.
Siłą Coriolisa działa w płaszczyźnie prostopadłej do![]()
i ![]()
, w kierunku przeciwnym do obrotu układu.
2. Podstawowe całki ruchu.
W układach zamkniętych (nie ma tam sił zewn.) istnieją takie funkcje współrzędnych i prędkości cząstek tworzących układ, które zachowują stałą wartość podczas możliwych ruchów układu. Funkcje te nazywamy całkami ruchu. Dla układu złożonego z N cząstek, między którymi nie ma sztywnych wiązań, można utworzyć 6N-1 całek ruchu. My jednak zajmiemy się całkami i własnościach addytywności. Polega ona na tym (addytywność) ze wartości całki ruchu dla układu złożonego z podukładów nie oddziałujących między sobą jest równa sumie wartości tej całki ruchu dla poszczególnych podukładow. Są 3 addytywne całki ruchu: energia, pęd i moment pędu. W związku z tym w układach zamknietych spełnione są 3 zasady zachowania: energii, pędu i momentu pędu. Są one ścisle związane z podstawowymi własnościami przestrzeni i czasu. U podstaw zachowania energii leży jednorodność czasu, tzn. równouprawnienie wszystkich chwil czasu. Należy to rozumieć następująco: zastąpienie chwili T1 chwilą T2 bez zmiany wartości współrzędnych i prędkości cząstek nie zmienia mechanicznych własności układu. Zachowanie pędu wiąże się z jednorodnością przestrzeni, tzn. z jednakowymi własnościami przestrzeni we wszystkich punktach. Należy to rozumieć w tym sensie, że równoległe przeniesienie układu zamknietego z jednego miejsca przestrzeni do drugiego, bez zmiany wzajemnych położeń cząstek, nie wpływa na mechaniczne własności układu (jeżeli układ na nowym miejscu jest nadal zamknięty). Zachowanie mom. Pedu wiąże się z izotropowością przestrzeni, tzn. jednakowymi własnościami przestrzeni we wszystkich kierunkach. Oznacza to, że obrót układu zamkniętego jako całości nie wpływa na mechaniczne włąsności tego układu.
Zasada zachowania pędu:
Twierdzenie o pędzie całkowitym - pochodna pędu całkowitego układu względem czasu jset równa wypadkowej sił zewnętrznych działających na układ: FZ = dp/dt.
Zasadza zachowania pędu - jeżeli wypadkowa sił zew. Działających na układ punktów materialnych jest równa zeru, to pęd całkowity tego układu jest stały: FZ= 0 => p=const. Albo - jeżeli wypadkowa sił wew. Działających na układ jest równa zeru , to pęd układu w stanie początkowym jest równy pędowi układu w stanie końcowym.
Zasada zachowania momentu pędu (krętu):
Kręt: ![]()
. Pochodna krętu jest równa mom. Siły: ![]()
.
Twierdzenie o kręcie całkowitym: Pochodna krętu całkowitego układu względem czasu jest równa momentowi wypadkowemu sił zewnętrznych: MZ = dL/dt.
Zasad zach. Krętu - jeżeli moment wypadkowy sił zewnętrznych działających na układ równa się zeru, to całkowity kręt tego układu jest stały: Mz=0 => L=const; ![]()
; jeżeli prędkości kątowe poszczególnych brył są sobie równe, to: ![]()
.
Zasada zachowania energii mechanicznej - energia układu odosobnionego i zachowawczego jest stała. EK+EP=const.
Zasada zachowania energii - całkowita energia układu odosobnionego jest wielkością stałą. W układzie odosobnionym mogą więc zachodzić tylko przemiany jendych form energii w inne.
26.Pole magnetyczne i jego względność:
Dwa równoległe przewodniki, przez które płynie prąd, przyciągają się lub odpychają się. Obserwując zamiast dwóch przewodników strumień swobodnych elektronów w pobliżu przewodnika z prądem, również stwierdzimy odchylenie biegu elektronów po włączeniu prądu. Można więc przyjąć, że w przestrzeni otaczającej przewodnik z prądem znajduje się pole magnetyczne. Pole to opisujemy za pomocą wektora indukcji magnetycznej ![]()
, zdefiniowanego przez siłę elektrodynamiczną działającą na poruszający się ładunek: ![]()
![]()
w próżni ![]()
Pole magnetyczne jest polem bezżródłowym , jest polem wirowym. Nie mam szans na otrzymanie pojedynczego bieguna N lub S .
Cyrkulacja ![]()
5
RÓWNANIE MAXWELLA:
Maxwell traktował przestrzeń jako ośrodek materialny - eter. Jeśli w przestrzeni nie ma żadnej dotykalnej materii ,prąd przesunięcia płynie w jakimś ośrodku.
Postać różniczkowa: 
μ0 i ε0 - stałe które charakteryzują własności próżni w sensie magnetycznym ( gdy nie ma materii) 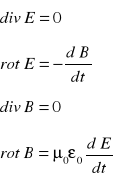
Są to cztery sprzężone równania różniczkowe cząstkowe .Stosują się one do każdego punktu przestrzeni pola elektromagnetycznego. W próżni gęstość ładunku ρ oraz prądu I równa się zero.
Maxwell jako pierwszy zasugerował, że światło jest falą elektromagnetyczną o określonym zakresie częstotliwości.
6
FUNKCJA FALOWA I JEJ INTERPRETACJA FIZYCZNA:
Równanie ruch fali:
![]()
Dla zwykłej cząstki energię mechaniczną E wyrażamy wzorem: ![]()
gdzie: p = mv - pęd cząstki, U - energia potencjalna. Energia fali według de Broglie`a dla cząstki o energii wyrażonej powyższym wzorem: ![]()
Równanie Schrodingera dla jednowymiarowej fali de Broglie`a niezależnej od czasu:![]()
Równanie Schrodingera w ogólnej postaci uwzględnia zależność funkcji falowej od trzech współrzędnych przestrzennych i od czasu. Jeśli pędowi cząstki p przyporządkowujemy operator ![]()
różniczkowania względem współrzędnych przestrzennych, to równanie Schrodingera dla ustalonej fali de Broglie`a możemy napisać w postaci: 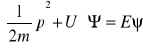
Im silniejsza w danym miejscu fala de Brogli`a, czyli im większa wartość funkcji falowej, tym więcej w tym punkcje elektronów. Kwadrat wartości bezwzględnej funkcji falowej w danym punkcje jest wprost proporcjonalny do prawdopodobieństwa znalezienia tej cząstki w danym punkcie. Samo równanie Schrodingera nie opisuje falowo - korpuskularnej natury cząstek, a jedynie naturę falową. Postulat Borna spełnia rolę równania wiążącego własności falowe z korpuskularnymi. Funkcja falowa jest niemierzalna . Według Borna, fale de Broglie`a są falami prawdopodobieństwa określającego stan materii.
RÓWNANIE SCHRODINGERA:
Na cząstkę może działać siła zewnętrzna, której odpowiada energia potencjalna U(x)., Ponieważ energia: ![]()
jest stała, więc jeśli U rośnie w miarę wzrostu x, to p będzie malało, co oznacza, że długość fali będzie wzrastała. Funkcja falowa musi mieć zmienną długość fali. Funkcja falowa, której długość fali rośnie w miarę zwiększania się x. Ścisłą postać funkcji ψ(x) o zmiennej długości fali znajduje się rozwiązując równanie różniczkowe zwane równaniem Schrodingera. W obszarze, w którym energia potencjalna U1 jest różna od zera, funkcja ψ(x) spełnia równanie: ![]()
Ponieważ równanie na funkcję ψ(x) ma taką samą postać dla U2,..,Uj, a dowolną funkcję U(x) można przybliżyć funkcją schodkową o bardzo małych schodkach Uj, więc U1 możemy zastąpić funkcją U(x) i otrzymujemy :![]()
Jest to równanie niezależne od czasu w jednym wymiarze. Stosuje się ono do ciał nierelatywistycznych wtedy, kiedy rozkład prawdopodobieństwo nie zmienia się w czasie. Warunki brzegowe: Jeżeli cząstka jest związana w studni potencjału, to prawdopodobieństwo znalezienia jej z dala od studni jest równe zeru. Stąd wynika warunek brzegowy: dla dużych wartości
x prawdopodobieństwo znalezienia cząstki jest równe zeru.
![]()
Wyszukiwarka
Podobne podstrony:
Energia relatywistyczna, STUDIA, Polibuda - semestr I, Fizyka, zaliczenie
elektrycznosć i magnetyzm nr 13, STUDIA, Polibuda - semestr I, Fizyka, zaliczenie
zagadnienia z fizyki na egzamin-1, STUDIA, Polibuda - semestr I, Fizyka, zaliczenie
zagadnienia z fizyki na egzamin, STUDIA, Polibuda - semestr I, Fizyka, zaliczenie
kinematyka i dynamika statyczna, STUDIA, Polibuda - semestr I, Fizyka, zaliczenie
mechanika, STUDIA, Polibuda - semestr I, Fizyka, zaliczenie
217, STUDIA, Polibuda - semestr I, Fizyka, laborki, 217
Fala to zaburzenie, STUDIA, Polibuda - semestr I, Fizyka, laborki, 217
215--, STUDIA, Polibuda - semestr I, Fizyka, laborki, 215
tresyta, STUDIA, Polibuda - semestr I, Fizyka
217 - instrukcje, STUDIA, Polibuda - semestr I, Fizyka, laborki, 217
PYTANIA skoczek, STUDIA, Polibuda - semestr IV, Organizacja Produkcji Budowlanej, obp zaliczenie
opbskoczek, STUDIA, Polibuda - semestr IV, Organizacja Produkcji Budowlanej, obp zaliczenie
opb opracowanie ok łabud, STUDIA, Polibuda - semestr IV, Organizacja Produkcji Budowlanej, obp zalic
Cwiczenie zabawowe, STUDIA, Polibuda - semestr II, Hydraulika i hydrologia, laborki z hydro
linia cisnien, STUDIA, Polibuda - semestr II, Hydraulika i hydrologia, laborki z hydro, laborki
więcej podobnych podstron