POLITECHNIKA POZNAŃSKA
WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA
Elastyczne systemy produkcyjne
Laboratorium: Obliczenie przestrzeni roboczej robota przemysłowego IRP6
Prowadzący: Wykonał:
mgr inż. Marcin Suszyński
Dawid Kluczyński
Zarządzanie i Inżynieria
Produkcji; rok I, sem II
stopień II, gr. A1
Poznań 2011
Celem ćwiczenia jest obliczenie przestrzeni roboczej robota przemysłowego IRP6 wykorzystywanego w automatyzacji procesów przemysłowych, przede wszystkim procesów uciążliwych lub trudnych do wykonania przez człowieka.
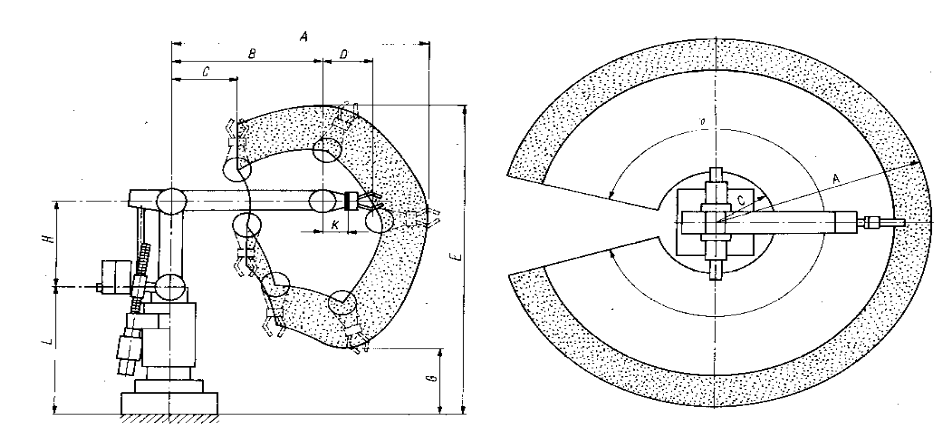
Robot IRP6 i jego przestrzeń robocza (źródło: www.edu.pl)
1 położenie
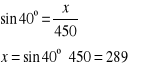
Ruch ramienia dolnego +40º
Ruch ramienia górnego +25º
![]()
![]()
![]()
![]()
2 położenie
Ruch ramienia dolnego +40º
3 położenie
Ruch ramienia dolnego -40º
x + y = 670
wartość szukana to x
![]()
![]()
y = 670 - x = 670 - 289 = 381
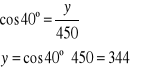
Z obliczeń poprzedniego położenia (2) wiem, że z = 344
4 położenie
Ruch ramienia dolnego +15º
Ruch ramienia górnego +25º
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
5 położenie
Ruch ramienia dolnego -40º
Ruch ramienia górnego +25º
z = x + y
![]()
![]()
![]()
![]()
z = x + y
y = z - x = 607 - 289 = 318
6 położenie
Ruch ramienia dolnego -40º
Ruch ramienia górnego -40º
![]()
![]()
![]()
![]()
25°
x
y
40°
z
40º
ź
y
40°
x
y
40°
z
x
15°
x
ź
z
25°
y
y
25°
z
x
40°
x
Wyszukiwarka
Podobne podstrony:
Sprawozdanie z wykonanego ćwiczenai33, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji,
Sprawozdanie z wykonanego ćwiczenia22, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji,
egzamin sciaga tk, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, Semestr III, Technol
Sprawozdanie z wykonanego ćwiczeni11, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, S
Sprawozdanie z wykonanego ćwiczeni33, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, S
Sprawozdanie z wykonanego ćwiczeni22, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, S
Sprawozdanie z wykonanego ćwiczeni2, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, Se
Sprawozdanie z wykonanego ćwiczeni1, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, Se
FINANSE (wykłady) pytania testowe cz. I, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji
odlewnictwo opracowanie, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, Semestr II, Me
opracowanie piaski, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, Semestr II, Metalur
OBRÓBKA CIEPLNA I SPAWALNICTWO opracowanie 1, Politechnika Poznańska - Zarządzanie i Inżynieria Prod
Wytrzymałość opracowanie, Politechnika Poznańska - Zarządzanie i Inżynieria Produkcji, Semestr IV, W
Pytania testowe na sprawdzian z obróbki cieplnej i spawalnictwa (1), Politechnika Poznańska - Zarząd
Wnioski sprawozdania - Lab 2, Politechnika Wrocławska - Inżynieria Lotnicza, Semestr VII, Podstawy e
więcej podobnych podstron