B. Metoda dynamiczna.
1. Obliczenie wartości średnich i odpowiadających im odchyleń standardowych następujących wielkości:
Czasu trwania 10 okresów bez ciężarków: 
![]()
![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Czas trwania 10 okresów z 2 ciężarkami:

![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Czas trwania 10 okresów z 4 ciężarkami:

![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Czas trwania 10 okresów z 6 ciężarkami

![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Wyniki obliczeń zawiera tabela.
N [1] |
t [s] |
t [s] |
0 |
3,44 |
0,11 |
2 |
4,66 |
0,12 |
4 |
5,68 |
0,16 |
6 |
6,68 |
0,19 |
N - liczba ciężarków
Okresy drgań wibratora dla różnej liczby ciężarków:
Wyniki obliczeń:
N [1] |
T [s] |
T [s] |
0 |
0,344 |
0,011 |
2 |
0,466 |
0,012 |
4 |
0,568 |
0,016 |
6 |
0,668 |
0,019 |
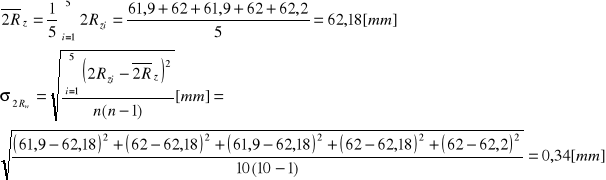
2. średnica zewnętrzna dodatkowych walców 2Rz
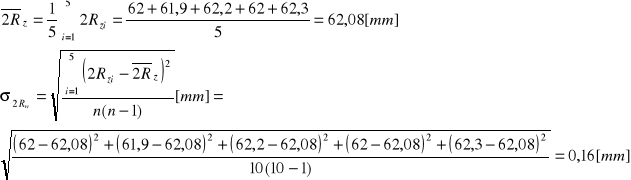
![]()
Średnica zewnętrzna wynosi: 2Rz = (0,0620± 0,0002) [m]
Promień zewnętrzny wynosi: Rz = (0,0310± 0,0001) [m]
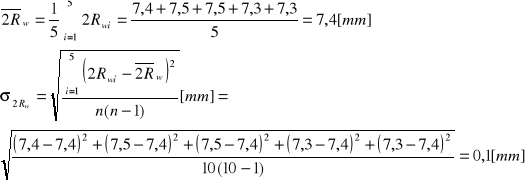
3. średnica wewnętrzna dodatkowych walców 2Rw
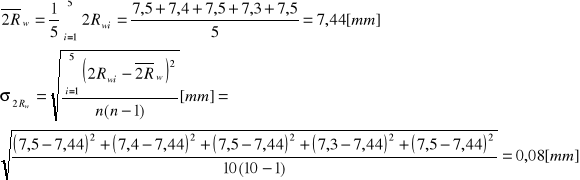
![]()
Średnica wewnętrzna wynosi: 2Rw = (0,0075 ± 0,0002) [m]
Promień wewnętrzny wynosi: Rw = (0,0032 ± 0,0001) [m]
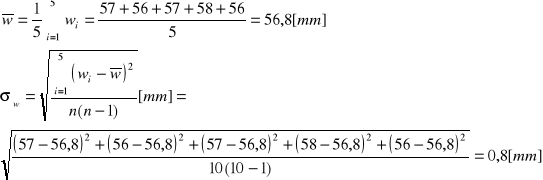
4. odległość w zamocowania walców od osi wibratora
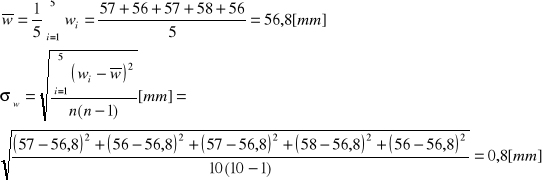
Niepewność wyników pomiaru odległości osi walców od osi wibratora:
![]()
= 0,9
Obliczona odległość wynosi: w = (0,0570 ± 0,0008) [m]
5. Obliczenie momentu bezwładności Il wibratora obciążonego dodatkowymi walcami.
Wzór na moment bezwładności jest następujący:
![]()
Dla N=0 ![]()
=0 ![]()
Dla N=2 ![]()
=2![]()
Dla N=4 ![]()
=4![]()
Dla N=6 ![]()
=6![]()
gdzie:
N - liczba dodatkowych walców
m = 0,5 [kg] - masa jednego walca
Rz = (31,0 ± 0,1) ×10- 3 [m] - promień zewnętrzny walców
Rw = (3,2 ± 0,1) ×10- 3 [m]- promień wewnętrzny walców
w = (56,8 ± 0,8) ×10- 3 [m].- odległość zamocowania walców od osi wibratora
Niepewność wyznaczenia momentu bezwładności.

dla N=0![]()
=0![]()
dla N=2

dla N=4

dla N=6

Wyniki obliczeń dla różnej liczby walców zawiera tabela.
N [1] |
Il ×10- 3 [m2kg] |
Il ×10- 3 [m2kg] |
2 |
3,24 |
0,03 |
4 |
6,48 |
0,07 |
6 |
9,73 |
0,01 |
6. Obliczenie modułu sztywności G.
Wzór na moduł sprężystości na skręcenie jest następujący

gdzie:
Il - moment bezwładności dodatkowych walców
l = (1,415 ± 0,002) [m] - długość pręta
R = (2,69 ± 0,05) ×10- 3 [m] - promień pręta
T - okres drgań wibratora nieobciążonego
Ti - okres drgań wibratora obciążonego dodatkowymi masa
Dla N=2:

Dla N=4:

Dla N=6:

Niepewność wyznaczenia modułu sztywności G.

Dla N=2

Dla N=2
![]()
=1,55 ×109 [Pa]
Dla N=4
![]()
=2,49 ×109 [Pa]
Dla N=6
![]()
= 3,12 ×109 [Pa]
Wyniki obliczeń zawiera tabela.
Il ×10- 3 [m2kg] |
G ×109 [N/m2] |
G ×109 [N/m2] |
3,2 |
21,1 |
1,5 |
6,4 |
29,2 |
2,5 |
9,7 |
31,1 |
3,1 |
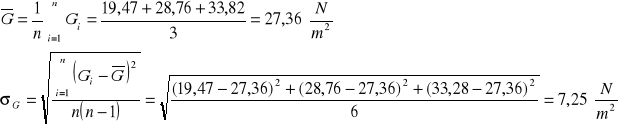
7. Obliczenie wartości średniej i odchylenia standardowego modułu sztywności G.
Obliczenia wykonujemy wg. wzorów
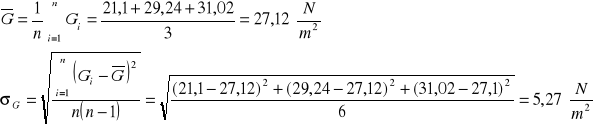
Wyznaczona metodą dynamiczną wartość modułu sprężystości na skręcanie wynosi:
G = (27,1± 5,3) ×109 [N/m2].
8. Porównanie modułu G obliczonego metodą dynamiczną z danymi tablicowymi.
Gt = 42 ×109 [Pa/rad] - wartość tablicowa dla mosiądzu
G = (27,1 ± 5,3) ×109 [Pa/rad] - wartość wyznaczona metodą dynamiczną
=
=35,47%
Porównanie powyższych wartości dało procentowy błąd wynoszący = 35,47%
B. Metoda dynamiczna.
1. Obliczenie wartości średnich i odpowiadających im odchyleń standardowych następujących wielkości:
Czasu trwania 10 okresów bez ciężarków: 
![]()
![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Czas trwania 10 okresów z 2 ciężarkami:

![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Czas trwania 10 okresów z 4 ciężarkami:

![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Czas trwania 10 okresów z 6 ciężarkami

![]()
![]()
,ponieważ dokładność stopera, którym był mierzony czas wynosi 0,1![]()
Wyniki obliczeń zawiera tabela.
N [1] |
t [s] |
t [s] |
0 |
3,78 |
0,16 |
2 |
4,20 |
0,15 |
4 |
5,14 |
0,11 |
6 |
6,16 |
0,11 |
N - liczba ciężarków
Okresy drgań wibratora dla różnej liczby ciężarków:
Wyniki obliczeń:
N [1] |
T [s] |
T [s] |
0 |
0,378 |
0,016 |
2 |
0,420 |
0,015 |
4 |
0,514 |
0,011 |
6 |
0,616 |
0,011 |
2. średnica zewnętrzna dodatkowych walców 2Rz
![]()
Średnica zewnętrzna wynosi: 2Rz = (0,0622± 0,0003) [m]
Promień zewnętrzny wynosi: Rz = (0,0311± 0,0001) [m]
3. średnica wewnętrzna dodatkowych walców 2Rw
![]()
Średnica wewnętrzna wynosi: 2Rw = (0,0074 ± 0,0001) [m]
Promień wewnętrzny wynosi: Rw = (0,0032 ± 0,0005) [m]
4. odległość w zamocowania walców od osi wibratora
Niepewność wyników pomiaru odległości osi walców od osi wibratora:
![]()
= 0,9
Obliczona odległość wynosi: w = (0,0568 ± 0,0008) [m]
5. Obliczenie momentu bezwładności Il wibratora obciążonego dodatkowymi walcami.
Wzór na moment bezwładności jest następujący:
![]()
Dla N=0 ![]()
=0 ![]()
Dla N=2 ![]()
=2![]()
Dla N=4 ![]()
=4![]()
Dla N=6 ![]()
=6![]()
gdzie:
N - liczba dodatkowych walców
m = 0,5 [kg] - masa jednego walca
Rz = (31,1 ± 0,1) ×10- 3 [m] - promień zewnętrzny walców
Rw = (3,20 ± 0,05) ×10- 3 [m]- promień wewnętrzny walców
w = (57,0 ± 0,8) ×10- 3 [m].- odległość zamocowania walców od osi wibratora
Niepewność wyznaczenia momentu bezwładności.

dla N=0![]()
=0![]()
dla N=2

dla N=4

dla N=6

Wyniki obliczeń dla różnej liczby walców zawiera tabela.
N [1] |
Il ×10- 3 [m2kg] |
Il ×10- 3 [m2kg] |
2 |
3,26 |
0,06 |
4 |
6,53 |
0,04 |
6 |
9,79 |
0,03 |
6. Obliczenie modułu sztywności G.
Wzór na moduł sprężystości na skręcenie jest następujący

gdzie:
Il - moment bezwładności dodatkowych walców
l = (1,416 ± 0,002) [m] - długość pręta
R = (2,71 ± 0,05) ×10- 3 [m] - promień pręta
T - okres drgań wibratora nieobciążonego
Ti - okres drgań wibratora obciążonego dodatkowymi masa
Dla N=2:

w
Dla N=4:

Dla N=6:

Niepewność wyznaczenia modułu sztywności G.

Dla N=2

Dla N=2
![]()
=1,12 ×109 [Pa]
Dla N=4
![]()
=1,98×109 [Pa]
Dla N=6
![]()
= 3,56 ×109 [Pa]
Wyniki obliczeń zawiera tabela.
Il ×10- 3 [m2kg] |
G ×109 [N/m2] |
G ×109 [N/m2] |
3,2 |
19,4 |
1,1 |
6,5 |
28,7 |
1,9 |
9,7 |
33,8 |
3,5 |
7. Obliczenie wartości średniej i odchylenia standardowego modułu sztywności G.
Obliczenia wykonujemy wg. wzorów
Wyznaczona metodą dynamiczną wartość modułu sprężystości na skręcanie wynosi:
G = (27,3 ± 7,3) ×109 [N/m2].
8. Porównanie modułu G obliczonego metodą dynamiczną z danymi tablicowymi.
Gt = 42 ×109 [Pa/rad] - wartość tablicowa dla mosiądzu
G = (27,3 ± 7,3) ×109 [Pa/rad] - wartość wyznaczona metodą dynamiczną
=
=34,85%
Porównanie powyższych wartości dało procentowy błąd wynoszący = 34,85%
9. Porównanie modułu metodą dynamiczną z dwóch różnych danych
G1 = (27,1 ±5,3) ×109 [Pa/rad] - wartość wyznaczona metodą dynamiczną
G2 = (27,3± 7,2) ×109 [Pa/rad] - wartość wyznaczona metodą dynamiczną
=
=0,73%
Porównanie powyższych wartości dało procentowy błąd wynoszący = 0,73%
Główną różnicą miedzy pomiarami I i II jest różnica czasów trwania 10 okresów. W przypadku I średni czas trwania okresów wynosi odpowiednio: z 2 ciężarkami 3,44, z 4 ciężarkami 4,66, z 6 ciężarkami 6,68, natomiast w II pomiarze: z 2 ciężarkami 4,2 ,z 4 ciężarkami 5,14, z 6 ciężarkami 6,16. Czas 10 okresów w naszym przypadku ma największy wpływ na moduł sztywności. Masa ciężarków w pomiarze I i II jest taka sama(0,5 kg) wiec nie ma wpływu na różnice miedzy wynikami.
WNIOSKI
1. Wartość modułu sztywności na skręcanie wyznaczona metodą dynamiczną jest bardziej zbliżona do wartości teoretycznej
błąd procentowy = 35,47% i = 34,85%
2. Niedokładności obliczeń wynikają:
- w metodzie dynamicznej błędy wynikają głównie z małej dokładności pomiaru czasu trwania 10 okresów drgań, refleksu osoby obsługującej stoper, niedokładności użytych przyrządów pomiarowych
3.Wyznaczone moduły sprężystości z dwóch różnych danych różnią się między sobą o 0,73%.
4. Moment bezwładności ciała zależy od wyboru osi obrotu, od kształtu ciała i od rozmieszczenia masy w ciele
12
Wyszukiwarka
Podobne podstrony:
widmo-1, Transport Polsl Katowice, 2 semestr, Fizyka, Fizyka Ja
fizykawyklad 001ukladyodniesienia, Transport Polsl Katowice, 2 semestr, Fizyka, FIZA, fizyka
fizykawyklad 005rezonanselektro, Transport Polsl Katowice, 2 semestr, Fizyka, FIZA, fizyka
defektoskop, Transport Polsl Katowice, 2 semestr, Fizyka, Fizyka Ja
elipsoida, Transport Polsl Katowice, 2 semestr, Fizyka, Fizyka Ja
elipsoida2, Transport Polsl Katowice, 2 semestr, Fizyka, Fizyka Ja
UPN projekt, Transport Polsl Katowice, 6 semestr, Studia 6, MOje, UPN Projekt
automa 4, Transport Polsl Katowice, 6 semestr, Studia 6, MOje, Automatyka
transport zywnosci, Transport Polsl Katowice, 5 semestr, TPD, Komplet
IM 9, Transport Polsl Katowice, 2 semestr, Inżynieria materiałowa, IM
wytrzymałośc projekt III i, Transport Polsl Katowice, 3 semestr, Rok2 TR
Projekt3 darek staryword, Transport Polsl Katowice, 5 semestr, 5 semestr, PKM3
projekt ze środków nr2, Transport Polsl Katowice, 6 semestr, Studia 6, Materiały Jacek, Środki trans
więcej podobnych podstron