LABORATORIUM PODSTAW METROLOGII M-T
Ćwiczenie nr 3
POMIARY PRZEMIESZCZEŃ LINIOWYCH.
Wprowadzenie.
Przetworniki do pomiaru przemieszczeń liniowych wykorzystywane są w metrologii warsztatowej, w robotyce, w układach sterowania automatycznego położeniem części maszyn lub narzędzi obróbczych oraz do kontroli stanu elementów wykonawczych automatyki. Pomiaru tego dokonuje się za pomocą czujników przemieszczeń pracujących w układach elektrycznych odpowiednich do wymagań współpracujących z nimi sterowanych urządzeń. W wielu układach automatyki przemysłowej sygnał pomiarowy z wyjścia czujnika przemieszczenia nie jest prezentowany na urządzeniach odczytowych lecz bezpośrednio jest wykorzystywany w zamkniętej pętli układu automatyki. Jednak w przeważającej liczbie przypadków wynik pomiaru przemieszczenia jest prezentowany na odpowiednich przyrządach odczytowych. W zależności od wymaganego zakresu mierzonych przemieszczeń oraz dokładności pomiaru wykorzystuje się różnego rodzaju czujniki przemieszczenia. Przy niezbyt dużych wymaganiach dokładnosciowych wykorzystuje się najczęściej indukcyjnościowe czujniki różnicowe, czujniki pojemnościowe oraz czujniki indukcyjne ( wiroprądowe ).
W przedmiotowym ćwiczeniu laboratoryjnym wykorzystywane są wymienione konstrukcje czujników przemieszczeń liniowych pracujące w prostych układach pomiarowych pozwalające mierzyć przemieszczenia w zakresie do ok.25mm z rozdzielczością 1m.
Konstrukcje i układy pomiarowe czujników przemieszczeń liniowych.
2.1. Czujnik indukcyjnościowy.
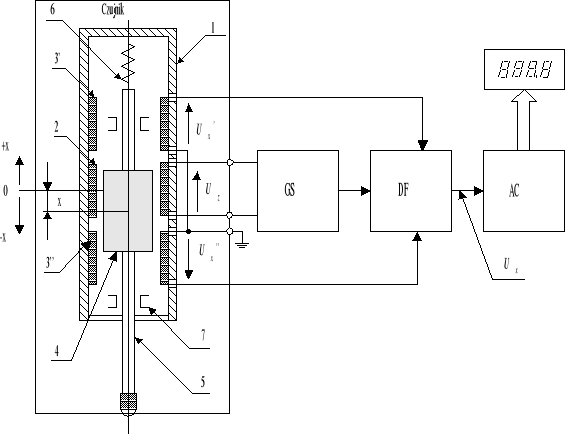
Na rys.1 przedstawiono szkic konstrukcji czujnika indukcyjnościowego różnicowego z rdzeniem nurnikowym pracującego w układzie przetwarzania przemieszczenie-stałe napięcie różnicowe.
Uzwojenia 2, 3'i 3” i przemieszczany rdzeń 4 czujnika stanowią transformator różnicowy, który jest zasilany z generatora sinusoidalnego GS. Napięcia UX' i UX” uzwojeń różnicowych wraz z napięciem generatora UZ podawane są na detektor fazowy DF pracujący zwykle w układzie jednopołówkowym lub pierścieniowym. Na wyjściu detektora fazowego znajduje się filtr z którego uzyskuje się napięcie stałe UX proporcjonalne do różnicy amplitud napięć UX' i UX”:
![]()
( 1 ).
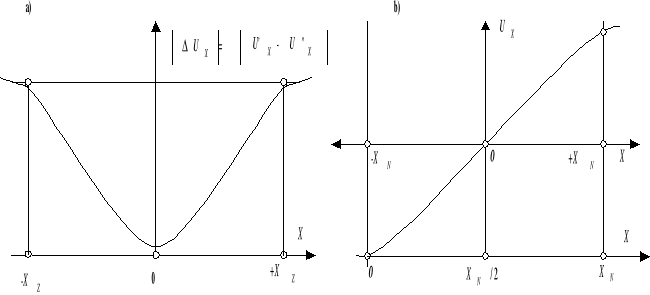
To napięcie stałe jest sygnałem wyjściowym czujnika, i jest mierzone w układzie jak na rys.1 za pomocą przetwornika analogowo-cyfrowego AC. Sposób detekcji napięć różnicowych według zależności (1) pozwala uzyskać praktycznie liniową charakterystykę czujnika przemieszczenia. Przykładową charakterystykę czujnika indukcyjnościowego z detektorem fazowym przedstawiono na rys.2b. Zastosowanie detektora fazowego w układzie czujnika linearyzuje jego charakterystykę zwłaszcza w obszarze przemieszczeń rdzenia czujnika w pobliżu położenia środkowego. W pobliżu środkowego położenia rdzenia czujnik różnicowy bez detektora fazowego jest nieliniowy ( rys.2a ). Ponadto można w nim wykorzystać tylko jedno ramię charakterystyki, a zatem ma on prawie dwukrotnie mniejszy zakres pomiarowy w porównaniu z czujnikiem z detektorem fazowym.
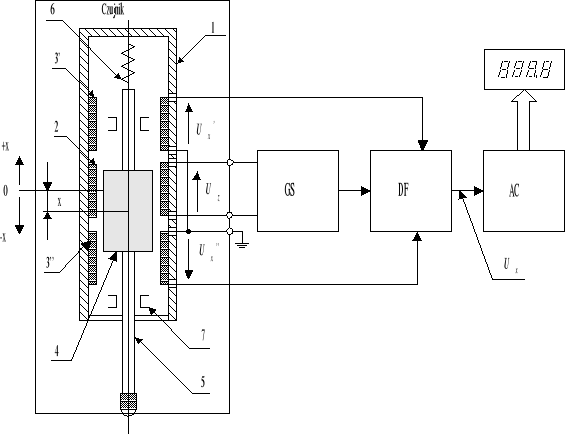
Rys.1. Czujnik indukcyjnościowy różnicowy w układzie detektora fazowego. Oznaczono;
1 - obudowa ferromagnetyczna, 2 - uzwojenie zasilające, 3' i 3” - uzwojenia różnicowe,
4 - rdzeń ferromagnetyczny, 5 - trzpień pomiarowy, 6 - sprężyna zwrotna, 7 - łożysko toczne.
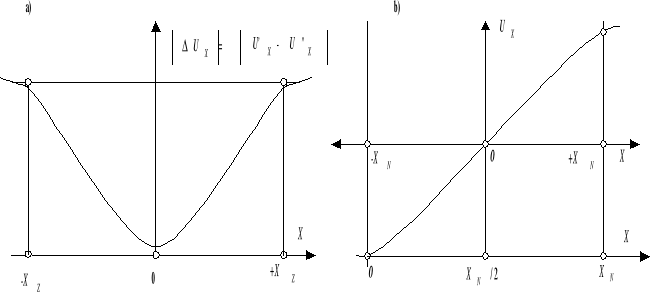
Rys.2. Charakterystyka indukcyjnego różnicowego czujnika przemieszczenia; a) - napięcia różnicowego , b) - napięcia stałego na wyjściu detektora fazowego.
Zależność napięcia wyjściowego czujnika indukcyjnościowego UX od przemieszczenia X można opisać zależnością:
![]()
( 2 )
gdzie: SU - czułość czujnika; ![]()
2.2. Czujnik indukcyjny ( wiroprądowy ).
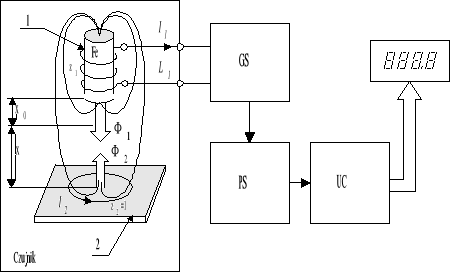
Czujnik indukcyjny wykorzystywany jest w praktyce do pomiaru małych przemieszczeń zarówno statycznych jak i dynamicznych. Ze względu na prostą konstrukcję, brak elementów ruchomych i wynikającą stąd małą inercję i dużą trwałość czujnika oraz bezdotykowy sposób pomiaru czujnik wiroprądowy ma zastosowanie w przemyśle szczególnie w pomiarach drgań mechanicznych, których częstotliwości sięgają kilkudziesięciu kHz. Na rys.3 przedstawiono zasadę konstrukcji oraz uproszczony układ pomiarowy czujnika wiroprądowego.
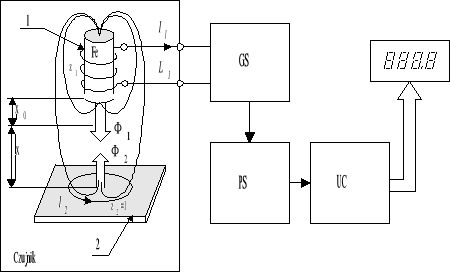
Rys.3. Zasada konstrukcji i układ pomiarowy czujnika indukcyjnego ( wiroprądowego ).
Zasadniczymi elementami czujnika jak na rys.3 jest cewka 1 zasilana prądem sinusoidalnym I1 z generatora GS oraz mocowana do badanego obiektu płytka 2 wykonana z metalu (zwykle z ferromagnetyka ). W zależności od odległości płytki od cewki (przemieszczenia) zmienia się indukcyjność cewki L1 oraz prąd zasilania I1 . Zmiany tych wielkości zależnie od układu generatora mogą wywoływać zmianę jego częstotliwości (okresu), napięcia wyjściowego lub poboru prądu ze źródła zasilania. Wymienione wielkości stanowią sygnał pomiarowy, który po odpowiednim przetworzeniu w układzie przetwarzania sygnału PS zamieniany jest na sygnał analogowy (napięcie stałe) lub cyfrowy (ciąg impulsów) dalej przetwarzany w układzie cyfrowym do postaci wartości liczbowej prezentowanej na przyrządzie odczytowym (zwykle cyfrowym polu odczytowym ). Dla czujnika wiroprądowego jak na rys.3 wielkością wyjściową zależną od mierzonego przemieszczenia jest okres generowanego przebiegu T.
![]()
( 3 ).
Wprowadzając pojęcie czułości czujnika dla okresu można zależność (3) przedstawić w postaci:
![]()
( 4 )
gdzie: ST - czułość czujnika dla okresu generowanego napięcia; ![]()
nie ma wartości stałej w całym zakresie pomiarowym.
Z zasady działania czujnika wiroprądowego wynika, że indukcyjność czujnika L (X ) zmienia się liniowo z przemieszczeniem jedynie dla małych przemieszczeń X<< X0. W praktyce czujniki wiroprądowe wykorzystywane są w pomiarach przemieszczeń do kilku mm rzadko do kilkunastu mm przy czym są one nieliniowe zwłaszcza w szerszych zakresach pomiarowych co zwykle wymaga stosowania układów linearyzujących. Ponadto przy wykorzystywaniu tych czujników należy liczyć się działaniem siły elektromagnetycznej na płytkę pomiarową co może powodować drgania badanego obiektu z podwójną częstotliwością zasilania czujnika lub jej wielokrotnością.
W układzie przedstawionym na rys.3 napięcie generatora sinusoidalnego GS jest przetwarzane w układzie PS tak, aby można było na jego wyjściu uzyskać sygnał proporcjonalny do okresu napięcia generatora (możliwe jest przetwarzanie proporcjonalnie do indukcyjności lub mocy strat czujnika).
2.3. Czujnik pojemnościowy.
Czujnik pojemnościowy o działaniu dotykowym podobnie jak czujnik indukcyjnościowy szczególnie dobrze nadaje się do pomiaru przemieszczeń statycznych lub wolnozmiennych. Wynika to z obecności ruchomych elementów w konstrukcji czujnika. Stosunkowo duża masa tych elementów powoduje ich dużą inercję. Z pośród opisywanych czujników przemieszczenia czujniki pojemnościowe mają najlepsze właściwości metrologiczne. Parametry elektryczne czujników pojemnościowych praktycznie nie zależą od temperatury i nie zmieniają się w czasie. Ponadto można budować czujniki o wymaganej charakterystyce przetwarzania przemieszczenia na pojemność na przykład liniowej. Niedogodnością są małe zmiany pojemności czujników pojemnościowych co powoduje, że czujniki te muszą pracować w układzie elektrycznym o częstotliwości od kilkuset Hz do kilku MHz. Czujniki pojemnościowe pracują zwykle w układach generatorów sinusoidalnych, mostków prądu zmiennego lub w układach impulsowych na przykład w układzie uniwibratora.
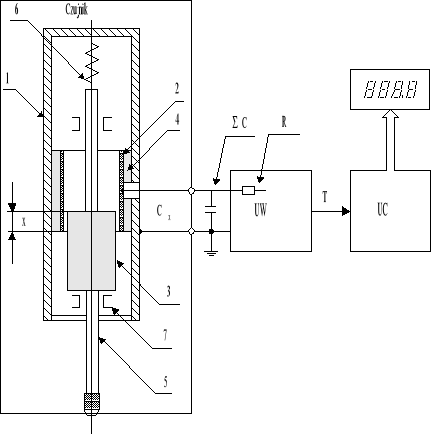
Na rys.4 przedstawiono szkic konstrukcji czujnika pojemnościowego pracującego w układzie uniwibratora.
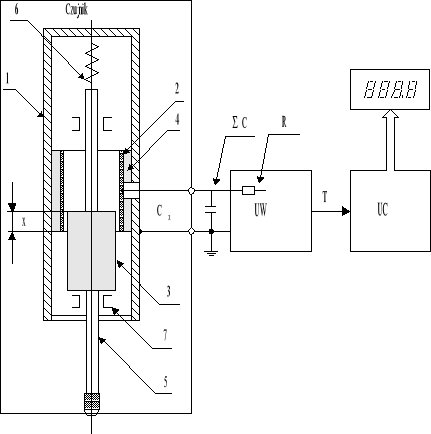
Rys.4. Czujnik pojemnościowy w układzie uniwibratora. Oznaczono; 1 - obudowa metalowa,
2 - elektroda stała, 3 - elektroda ruchoma, 4 - dielektryk stały, 5 - trzpień pomiarowy,
6 - sprężyna zwrotna, 7 - łożysko toczne.
W układzie pomiarowym jak na rys.4 na wyjściu uniwibratora UW generowane są impulsy prostokątne, których okres jest równy:
![]()
( 5 )
gdzie CX - pojemność czujnika,
ΣC - sumaryczna pojemność pasożytnicza na wejściu uniwibratora ( w tym pojemność
kabla czujnika ),
R - rezystancja w układzie relaksacyjnym uniwibratora,
![]()
.
Zmiany okresu impulsów na wyjściu uniwibratora w zależności od mierzonego przemieszczenia opisuje zależność:
![]()
( 6 )
gdzie ST - czułość czujnika dla okresu sygnału wyjściowego; ![]()
.
Sygnał wyjściowy z uniwibratora wymaga przetworzenia na napięcie stałe lub sygnał impulsowy w odpowiednim kodzie cyfrowym. Należy zauważyć, że przetwarzanie częstotliwości sygnału z uniwibratora na napięcie powoduje nieliniowość charakterystyki układu czujnika przy liniowej zależności pojemności czujnika od mierzonego przemieszczenia.
Stanowisko laboratoryjne do pomiaru charakterystyki statycznej czujników przemieszczeń liniowych.
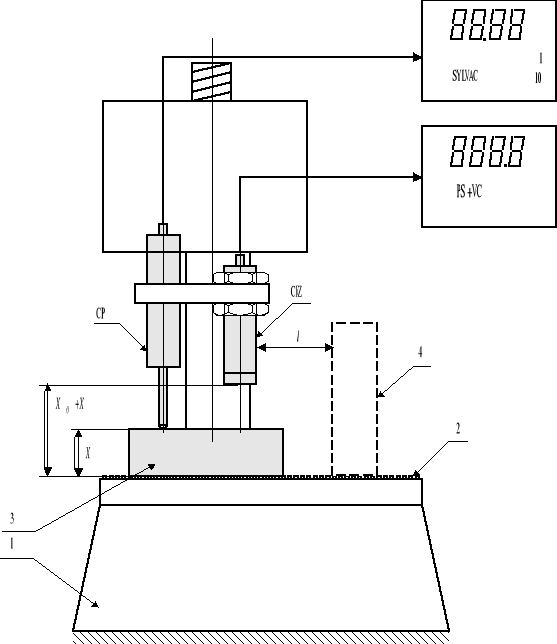
Na rys.5 przedstawiono szkic stanowiska pomiarowego z ławą pomiarową z suportem śrubowym i optycznym układem odczytu położenia suportu.
Na stanowisku tym bada się jednocześnie dwa czujniki, które oznaczono odpowiednio: CI - czujnik indukcyjnościowy (opcjonalnie CW - czujnik wiroprądowy),. CP - czujnik pojemnościowy.
Czujnik indukcyjnościowy CI pracuje w układzie różnicowym z detektorem fazowy DF i cyfrowym układem pomiaru napięcia VC. Układ ten umożliwia pomiar przemieszczeń w całym zakresie pomiarowym czujnika lub w ograniczonym do jego środkowej części przy czym zwiększona jest rozdzielczość pomiaru.
Czujnik pojemnościowy CP pracuje w układzie uniwibratora UW, którego sygnał wyjściowy jest mierzony za pomocą cyfrowego częstościomierza liczącego PFL. Częstościomierzem tym można mierzyć okres lub częstotliwość sygnału wyjściowego uniwibratora.
Przemieszczenia ustala się za pomocą pokrętła 5 napędu suportu 4 ławy pomiarowej 2 i odczytuje się za pomocą okularu Abbe'go 6 z precyzerem optycznym strojonym za pomocą pokrętła 7. Mierzone przemieszczenie X wyznacza się jako różnicę położeń zderzaka 3 opartego (bez luzu) na trzpieniach pomiarowych badanych czujników.
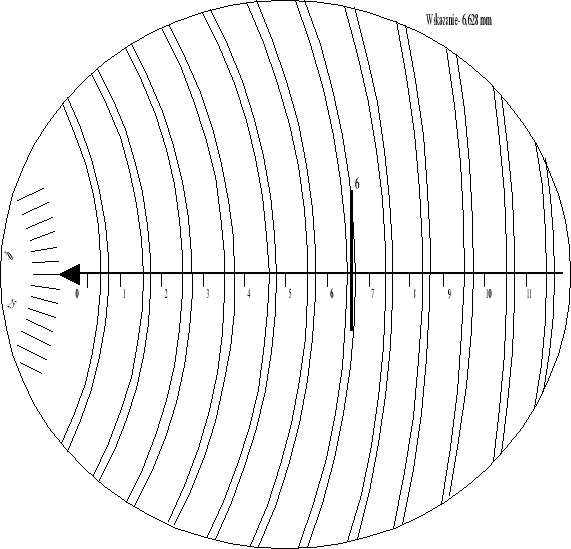
Ława pomiarowa jak na rys.5 pozwala ustalać położenia zderzaka pomiarowego 3 z rozdzielczością 1m. w zakresie przemieszczeń do ok.100mm. Aby uzyskać podaną rozdzielczość ustalanych położeń zderzaka pomiarowego należy tak regulować precyzer pokrętłem 7 , aby uzyskać obraz w okularze jak to pokazano na rys.6 dla przykładowego wskazania
Xp. = 6,628mm.
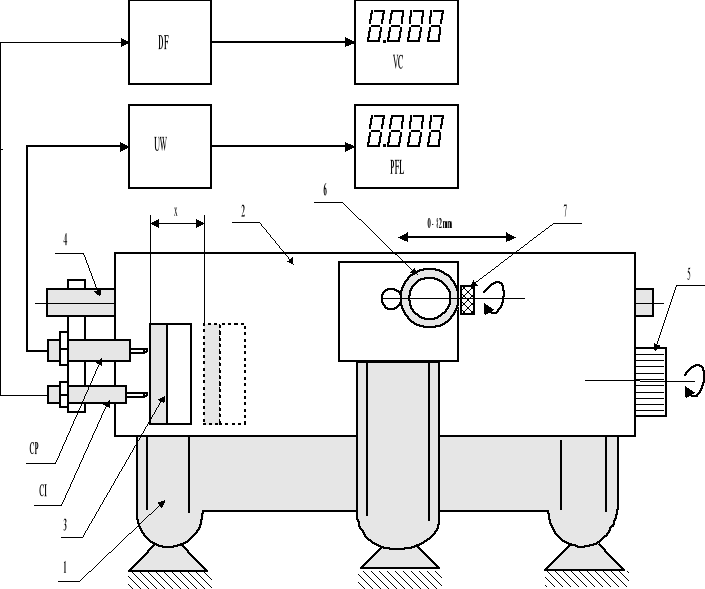
Rys.5. Stanowisko do badania charakterystyk statycznych czujników przemieszczeń liniowych. Oznaczono; 1 - podstawa ławy pomiarowej, 2 - ruchoma ława pomiarowa, 3 - zderzak pomiarowy,
4 - suport ławy pomiarowej, 5 - pokrętło napędu suportu, 6 - okular Abbe'go, 7 - pokrętło precyzera okularu.
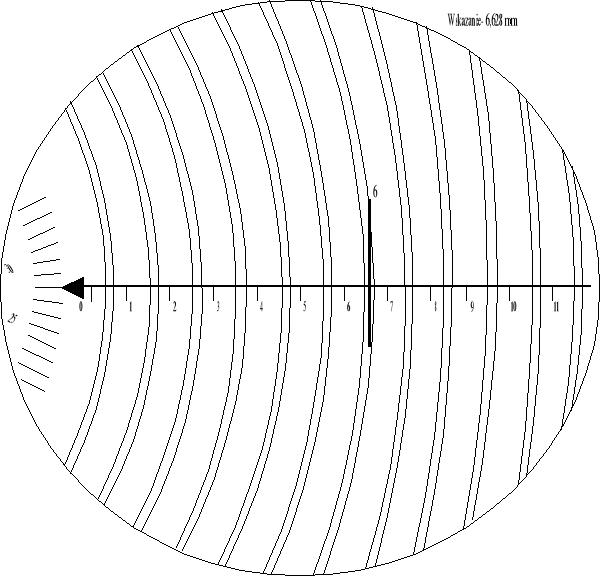
Rys.6. Sposób odczytu wskazania w okularze Abbe'go.
Obraz w okularze jak na rys.6 uzyskano po przesunięciu ławy pomiarowej do położenia 6,628mm. Najpierw należy odczytać wartość z podziałki liniowej ( w tym przypadku 6 ) następnie dalej poruszając napędem suportu po ustaleniu się wskaźnika ( pionowa kreska na rys.6 ) pomiędzy sąsiednimi łukami podziałki obracając pokrętłem precyzera doprowadzić położenie wskaźnika najbliższą wartość na podziałce poziomej i odczytać wartość wskazaną na podziałce łukowej precyzera ( w tym przypadku odczytano wartość 28 ). W ten sposób odczytana wartość wynosi
6,628mm.
Pytania kontrolne.
Podać zasady działania czujników przemieszczeń liniowych.
Dlaczego czujniki indukcyjnościowe i pojemnościowe nie są wykorzystywane do pomiaru drgań mechanicznych?
W jakim celu w układach pomiarowych czujników indukcyjnościowych wykorzystuje się detektory fazowe?
W jakich układach pracują czujniki pojemnościowe?
Porównać charakterystyki statyczne opisywanych w ćwiczeniu czujników.
Wymienić i uzasadnić sposoby zwiększenia czułości czujników przemieszczenia.
Który z opisywanych w ćwiczeniu czujników pozwala uzyskać najwyższą dokładność pomiaru przemieszczenia. Uzasadnić odpowiedź.
Dlaczego czujniki wiroprądowe są wrażliwe na zbliżenie do nich przedmiotów metalowych?
Program ćwiczenia.
Dokonać identyfikacji badanych czujników i współpracujących z nimi układów pomiarowych.
Przygotować układy pomiarowe do pracy i ustalić położenie początkowe ławy pomiarowej.
Zdjąć charakterystyki statyczne czujników Y = f(X) przemieszczając ławę pomiarową za pomocą pokrętła suportu; Y - wskazanie przyrządu pomiarowego ( częstotliwość Y = f , okres Y = T, napięcie Y = U ) ; wartości położeń X odczytywać za pomocą okularu Abbe'go.
Dokonać pomiaru charakterystyki czujnika indukcyjnego także dla zwężonego zakresu pomiarowego.
Sporządzić wykresy czułości badanych czujników: SU = f( X ), ST = f( X ), SC = f( X ) - czułość czujnika pojemnościowego ( bez układu pomiarowego ).
Sporządzić wykresy błędów nieliniowości badanych czujników: δNU = f( X ), δ = f( X ).
Wnioski z pomiarów.
Uwaga! Zachować ostrożność przy ustawianiu ławy pomiarowej na początkowe położenia - istnieje możliwość uszkodzenia badanych czujników wskutek uderzenia ich zderzakiem ławy pomiarowej ( duża masa ławy ).
Opracował: Jan Leks
1
8
Wyszukiwarka
Podobne podstrony:
Pomiary przemieszczen liniowych1, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiar predkosci obrotowej, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiar przeplywu cieczy, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiary temperatur-wykresy, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiar pradu stalego, Księgozbiór, Studia, Elektronika i Elektrotechnika, Metrologia
Inteligentne przyrzady pomiarowe, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiary temperatur, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Predkosc obrotowa, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiary napiecia, Księgozbiór, Studia, Elektronika i Elektrotechnika, Metrologia
Sprawozdanie(1), Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Statyczne termometry elektryczne, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Transformatory pomiarowe, Księgozbiór, Studia, Elektronika i Elektrotechnika, Metrologia
Opracowanie wynikow pomiarow, Księgozbiór, Studia, Elektronika i Elektrotechnika, Metrologia
Bramki logiczne, Księgozbiór, Studia, Elektronika i Elektrotechnika
MT wiecz MiBM, Księgozbiór, Studia, Elektronika i Elektrotechnika
Przerzutniki, Księgozbiór, Studia, Elektronika i Elektrotechnika
EiN zestaw, Księgozbiór, Studia, Elektronika i Elektrotechnika
MT WT dz, Księgozbiór, Studia, Elektronika i Elektrotechnika
więcej podobnych podstron